Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
|
|
|
- Engin Aydoğan
- 8 yıl önce
- İzleme sayısı:
Transkript
1 Yrd. Doç. Dr. Kurtuluş Sedar GÖRMÜŞ
2 Giriş ve Amaç Hata Teorisi, Hata Türleri Ölçü ve Hata Hata Türleri Doğruluk Ölçütleri Kovaryans ve Korelasyon Hata Yayılma Kuralı Ölçülerin Dengelenmesi Dolaysız Ölçüler Dengelemesi Dolaylı Ölçüler Dengelemesi
3 Dengeleme hesabının amacı; gereğinden fazla sayıda yapılmış ölçülerden hiç birini seçip ayıklamaksızın bilinmeyenlerin Kesin Değer ya da Dengeli Değer diye adlandırılan en uygun değerini belirlemek, ölçülerin kesin değerlerinin ya da duyarlıklarının ve güvenilirliklerini saptamaktır. Bu amaca ulaşabilmek için uygulanan ilke EN KÜÇÜK KARELER YÖNTEMİ dir.
4 Ölçüler aynı alet, aynı ölçmeci ve aynı koşullar altında yapılsa bile, geometrik ya da fiziksel büyüklüklerin ölçülmesi sonucunda elde edilen değerler hata ile yüklüdür. Söz konusu hatalar; 1.Ölçme işini yapanların duyu organlarının yetersizliğinden, 2. Ölçü aletlerinin yeterince gelişmiş olmamalarından, 3. Fiziksel çevre koşullarından kaynaklanabilir. Bu nedenle uygulamada gerekli sayıda ölçü ile yetinilmez, gereğinden fazla ölçü yapılır. Ölçüler arasındaki ilişkileri görebilmek ve ölçülerle bilinmeyenler arasındaki fonksiyonel ilişkileri kurabilmek için dengeleme hesabı yapılır.
5 Jeodezi ve Fotogrametri Mühendisleri iyi bilir ki; Ölçme işlemi aynı kişi, aynı alet ve aynı koşullar altında tekrarlansa bile sonuçlar birbirinden az ya da çok farklı olur. Teorik anlamda hatasız ölçü olmayacağı için gereğinden fazla ölçüm yapılarak ölçülerdeki hataların olumsuz etkilerinden kurtulmaya çalışılır. Ölçülen büyüklüğün gerçek değeri belirlenemez. Gerçek değeri kesin olarak belirleyebilmek için sonsuz ölçüm yapmak gerekir. Bunun yerine DENGELEME HESABI ile ölçüye ait iyi bir kestirim değeri (Kesin Değer) elde edilebilir. Dengeleme Hesabının yapılabilmesi için tek koşul fazla ölçü sayısının olmasıdır. u bilinmeyenli bir problem için (n) adet ölçü verilmişse; f=n-u : Fazla ölçü sayısı olmak üzere f>0 ise dengeleme yapılır f=0 ise cebrik çözüm yapılır f<0 ise ancak varsayımlara dayalı bir çözümden bahsedilebilir.
6 Dengeleme Hesabı ile tüm ölçülerden yararlanarak bilinmeyenlerin gerçek değer olma olasılığı en yüksek olan dengeli değer elde edilir.
7 Her ölçü hata ile yüklüdür Dengeleme Hesabının amacı Kesin Değer diye adlandırılan temel değerin bulunmasıdır. Bir ölçünün beklenen değerden farkına hata ya da ölçü hatası adı verilir. Beklenen değer genellikle bilinmediğinden onun yerine kestirim değeri kullanılır.
8 Gerçek Değer; Teorik anlamda hatasız ölçü yapılamayacağı için ölçülerin gerçek değeri bilinemez. Üçgenin iç açıları toplamı gerçek değerdir Kesin Değer; Gerçek değer olma olasılığı en yüksek olan ve gereğinden fazla sayıda ölçülerden dengeleme hesabı ile bulunan değerlerdir. Hata=Ölçü-Olması gereken değer f = l x Düzeltme ise hatanın ters işaretlisidir. v = x l = f Ölçü-Gerçek Değer=Gerçek Hata l η = ε
9 Ölçü-Kesin Değer=Kesin Hata l x = f ε = η l Gerçek Düzeltme v = x l Düzeltme
10 Oluşumları bakımından hatalar başlıca 3 gruba ayrılır Kaba Hatalar; Ölçmecinin dalgınlığı ya da yorgunluğu nedeni ile ortaya çıkan hatalardır. Açı ölçümündeki Grad hatası, Çelik şerit metre ile ölçümde tam sayı unutulması vs Bu hataları ortadan kaldırmak için büyüklükler çok sayıda tekrarlanır. Ölçü dizisinde diğerlerinden önemli bir şekilde sapan değerlerden kuşkulanılır. Düzenli (Sistematik) Hatalar; Ölçüleri düzenli, çoğunlukla kurallı bir biçimde etkileyen hatalardır. Örnek olarak Nivelmanda mira ölçek hatası, Çelik şerit metrede sıfır noktası hatası vs Bu hataların en önemli özelliği değişmeyen şartlar altında eşit büyüklükler olarak ortaya çıkmalarıdır. Ölçü aletleri ayarlanarak etkileri azaltılabilir.
11 Düzensiz (Rasgele, Tesadüfi) Hatalar; Ölçü hatalarının en önemli sınıfını ve dengeleme hesabının konusunu oluşturan hata türüdür. Bir ölçünün rasgele hatasının büyüklüğü ve işareti önceden kestirilemez. Bu hatalar, ölçme aletlerinin kusursuz olmaması, gözlemcinin algılama gücünün sınırlı olması, sıcaklık, basınç, rüzgar gibi dış etkenlerin değişken olmasının doğal sonucu olarak ortaya çıkar.
12 Ölçülerden herhangi birinin ne kadar güvenilebilir olduğu konusunda bilgi verebilmek için tanımlanmış ölçütlerdir. Aynı bir büyüklüğün birden çok ölçülmesi sonucunda elde edilen ölçü dizilerinden yararlanılarak tanımlanır. İşaretlerinin pozitif olma olasılığı negatif olma olasılıklarına eşit olmalarından dolayı işaretleri olarak ± alınır. Doğruluk gerçek değere olan yaklaşımdır. Duyarlık ise birden çok sayıda yapılan ölçmelerin kendi aralarındaki tutarlılığın bir göstergesidir. Bu ölçütler, ölçülerin ne denli güvenilir oldukları konusunda bilgi vermek için tanımlanmıştır. Doğruluk ölçütleri bir aralık tanımladığı için ± işareti ile yazılır. Duyarlık olarak ifade edilen sayısal değerin küçüklüğü ölçünün kalitesini, büyüklüğü ise kalitesizliğini gösterir.
13 Gerçek değeri bilinen bir büyüklüğün n kez ölçülmesi durumunda; ε i = l i η (i=1,2,3,.,n) Gerçek hata=ölçü-gerçek Değer Mutlak Hata ise t ile simgelenir t = ± n i=1 n ε i
14 Ortalama hata yerine daha çok standart sapma deyimi kullanılır. Dengeleme hesabında ise ortalama hataya karesel ortalama hata denilir. Bu ölçüt en çok kullanılan ölçüt olup Gauss tarafından tanımlanmıştır. Ölçü dizisindeki gerçek hataların karelerinin ortalamasının karekökü olarak hesaplanır. m = ± εε n Formüle bakıldığında hatalar kareleri oranında ortalama hataya tesir ettikleri için büyük hataların sonuca etkisi yüksektir. Bu nedenle ortalama hata kaba hatalı ölçülerden aşırı etkilenir.
15 Aynı bir büyüklüğün ölçülmesi sonucunda elde edilen bir ölçü dizisinin gerçek hataların ya da ölçülerin kesin değerden farkları olan düzeltmelerin kareleri toplamı ölçü sayısına bölünür ve hesaplanan bu değerin karekökü alınarak bulunur. Yaygın olarak kullanılan bir duyarlık ölçütüdür. Hatalar kareleri oranında ortalama hataya tesir ettikleri için büyük hataların sonuca etkisi büyüktür. Bu nedenle ortalama hata kaba ölçülerden aşırı olarak etkilenir.
16 Eğer ortalama hata gerçek değerlerden (gerçek değerler her zaman bilinemez) elde ediliyorsa;
17 Eğer ortalama hata düzeltme değerlerinden elde ediliyorsa Şeklinde formülüze edilir. Bu formül duyarlıkları (ağırlıkları) eşit korelâsyonsuz ölçüler için geçerlidir. Burada n ölçü sayısıdır. Gerçek değer bilindiği zaman, bilinmeyen olmadığından dolayı paydaya n yazılır. Gerçek değer bilinmediği zaman paydaya n-1 yazılır. Buradaki 1 rakamı bilinmeyen sayısını ifade eder.

18 Mutlak değer olarak büyüklük sırasına dizilmiş gerçek hata kümesinin medyanı olası hata değeridir. Bir dizinin medyanı eleman sayısı tek ise dizinin ortasındaki değer, eleman sayısı çift ise ortadaki değerin aritmetik ortalamasıdır. Bağıl Hata; Bir ölçüde yapılan hatanın ölçüye oranıdır. Bağıl Hata = Hata Ölçü
19
20
21
22
23 Bir uzunluğun gerçek değeri m olarak verilmiştir. Bu büyüklüğe ait 10 adet ölçü de aşağıda verildiğine göre; Ölçülere ait gerçek hataları Karesel ortalama hatayı Mutlak hatayı Olası hatayı Bağıl hatayı bulunuz
24 Uzunluğu m olan bir ayar bazı iki ayrı ölçme ekibince mm birimine kadar okuma yapılarak çelik şeritle 20 şer kez ölçülmüştür. Her iki ölçme ekibinin elde ettiği sonuçlar verildiğine göre ölçü dizisi için bir ölçünün ortalama hatasını, ortalama hatasını ve olası hatasını hesaplayınız.
25 l 1 l
26 Bir ölçü çok sayıda tekrarlandığında ortaya çıkan hatalar incelenirse bunların belirli kurallara uyduğu görülür; (+) işaretli hata sayısı yaklaşık olarak (-) işaretli hata sayısına eşittir. Küçük hata yapma olasılığı büyük hata yapma olasılığından büyüktür. Hataların sıfır civarında yığılmaları en fazladır.
27 Gauss a göre bir (ε) hatasının gerçekleşme olasılığı; f ε = 1 σ 0 2π e ε2 2σ 0 2 < ε < + σ 0 = m 0 ; Birim ölçünün ortalama hatası e= ε = x μ ; Gerçek hata
28 Dengelemenin amacı, fazla ölçülerden yararlanarak bilinmeyenlerin en uygun, olasılığı en fazla olan değerlerini elde etmek, ölçülerin ve bilinmeyenlerin duyarlıkları hakkında bilgi edinmektir. Düzeltmeler v 1, v 2,.. v n ile gösterilirse bu düzeltmelerin olasılıkları; P(v 1 )=φ(v 1 )= 1 m 0 P(v 2 )=φ(v 2 )= 1... m 0 P(v n )=φ(v n )= 1 m 0 2π e 2π e 2π e v1 2 2m 0 2 v2 2 2m 0 2 vn 2 2m 0 2 olur
29 Dengeleme hesabında bu düzeltme verilerinin ölçülerin hepsine uygulanması istenir. Bu olayın olasılığı P(D) ile gösterilirse, olasılık hesabının çarpım kuralına göre; A ve B olasılıkları P(A) ve P(B) olan iki olay ise bu iki olayın örneklemede birlikte olma olasılıkları; P(A B) =P(A)*P(B A)=P(B)*P(A B) ile hesaplanır P(B A); Koşullu olasılık P(B A)= P(A B) P(A) P(A B), P(A B)= olur P(B) 2 e v 1 +v vn 2 P(D)=φ(v 1 )= 1 m 0 2π n 2m 2 0 olarak bulunur. 2 Dengeleme hesabının amacı, olasılığı maksimum olan değeri elde etmek olduğundan; P(D)=Max olması gerekir.
30 P(D) maksimum olması için; v 1 2 +v v 2 n 2m2 =minimum olması gerekir. 0 v v v n 2 =[VV]=V T V=Min Yukarıdaki son eşitlik duyarlıkları eşit ölçülerin En Küçük Kareler Yöntemine göre dengeleme ilkesi denilir.
31 Duyarlıkları farklı ölçülerin dengelenmesi sonucunda duyarlığı ±mi olan bir l i ölçüsüne v i düzeltmesi getirme olasılığı; v i 2 P(v i )=φ(v i )= 1 m i 2π e 2m 2 i i=1,2,.,n P(D)=P(v 1 ) P(v 2 ). P(v n ) Ağırlık Tanımı; P i = 1 mi 2 Burada P(v i ) değerleri yerine koyulursa; P(D)=φ(v 1 )= 1 2π n e P1v1 2 m 1.m 2 m n Burada P(D)=Max olabilmesi için; 2 +P 2v Pnvn 2 P 1 v P 2 v P n v n 2 =[PVV]=V T PV = Min Ağırlıkları farklı gözlemlerin En Küçük Kareler Yöntemi ile Dengelem İlkesidir. 2
")
32 Gauss ölçü hatalarına ilişkin yoğunluk fonksiyonunun çan eğrisi şeklinde olduğunu kanıtlamış ve buna Hata Eğrisi adını vermiştir. Sıklık ε (hata)
33
34 Rasgele Değişken; Rastgele bir örneklemenin sonucunu gerçel sayılarla gösteren bir fonksiyondur. (Trafikteki kaza sayısı, Şehirde yaşayan insanların boyları, yoldan geçen otomobil sayısı vs ) Bir X rassal değişkeninin a değerini alma olasılığı P(X=a) X in I(a,b) aralığında olma olasılığı P(a<X<b) X in c den küçük ya da eşit olma olasılığı P(X c) X in - ile + arasında olma olasılığı P(- <X< + )=1 X in c den büyük olma olasılığı P(X>c)=1- P(X c) Olur
35 Düzgün bir zarla atışta elde edilecek X rastgele değişkeni durumu P(X=1), P(X=2) P(1<X<2), P(1 X<2) P(3 X 4), P(1 X<4) P(1 X 6), P(- <X< + )
36 X rastgele değişkeninin ortalama değer civarındaki yaygınlığının ölçütüdürler. Bir rastgele değişkenin aldığı değerler ortalama değer civarına ne kadar yığılırsa dağılımın varyansı (σ 2 ) ya da standart sapması (σ) o derece küçük olur.
37 Bir dağılımın ortalama ya da ümit değeri μ ile gösterilir. μ = + xf x dx formülü ile hesaplanır.

38 f(x)= 1 6 x=1, 2,.., 6 Ümit Değer; μ = =? Bu zar ile 1000 atış yapılırsa atılan sayıların toplamının 1000*? Olması beklenir.
 φ(ε) -m 0 +m 0 Olasılık fonksiyonu φ(ε) nun -m 0 ile +m 0 sınırları arasında kalan alanı tüm alanın %68 idir.")
39 Ölçü hatalarına ilişkin yoğunluk fonksiyonu çan eğrisi biçimindedir ve buna Normal Dağılım ya da Gauss Dağılımı denir. σ(ε) φ(ε) -m 0 +m 0 Olasılık fonksiyonu φ(ε) nun -m 0 ile +m 0 sınırları arasında kalan alanı tüm alanın %68 idir. Yani ölçü hatalarının %68 i bu aralıkta yığılmıştır. ε
40 Sınırlar φ(ε) 1-φ(ε) -m 0 ile +m /3-2m 0 ile +2m /20-3m 0 ile +3m /400-4m 0 ile +4m /10000 Yukarıdaki tablodaki bilgilerden, rasgele ölçü hatalarının 1/400 ünün başka bir değişle 1000 hatadan yalnızca 3 ünün mutlak değerce, ortalama hatanın 3 katından büyük olduğu görülmektedir. Bu nedenle jeodezik çalışmalarda genellikle ortalama hatanın 3 katı, hata sınırı olarak kabul edilir ve bundan daha büyük hatalar kaba hata olarak yorumlanır.
41
42
43
44
45
46
47
48
49
50 u = X μ σ Burada X; Rastgele Değişken, μ; Ümit Değer ve σ; standart sapmadır. F(x)=φ( X μ )=φ(u) σ P(x 1 < X < x 2 ) = F x 2 F x 1 =φ( X2 μ σ )-φ(x1 μ) σ =φ u2 φ(u1) φ u = 1 φ(u)
51
52 Bir açı ölçüsünün ortalama değeri grad ve standart sapması 8 grad saniyesi olarak verilmektedir. Ölçülen bir açının graddan büyük olması Ölçülen bir açının ile grad aralığında olma olasılıklarını hesaplayınız
53 Bir açı büyüklüğünü gösteren X değişkeni normal dağılımlıdır. Beklenen değer μ=400 grad ve standart sapması σ=2 mgrad dır. Ölçü değerleri için; graddan küçük olması ile grad aralığında olması graddan büyük olması olasılıklarını hesaplayınız
54 Kovaryans iki rastgele değişken arasındaki ilişkiyi gösteren bir parametredir. Kovaryans (+), (-) işaretli herhangi bir değer veya sıfır olabilir. x ve y normal dağılımlı iki rastgele değişken ise ikisi arası kovaryans σ xy ; σ xy = E( x μ x y μ y ) biçiminde tanımlanır. σ xy (+) ise x ve y değişkenler artı korelasyonlu, (-) işaretli ise eksi korelasyonludur denir. σ xy = 0 ise korelasyonsuz yani birbirinden bağımsızdır. Korelasyon ise kovaryansın standartlaştırılmış halidir.
55 x ve y rastgele değişkenleri standartlaştırılırsa bunların çarpımlarının beklenen değerine Korelasyon Katsayısı denilir. Korelasyon katsayısı ρ xy ; ρ xy =E x μ x σ x y μ y σ y = σ xy σ x σ y dir. ρ xy birimsiz bir büyüklüktür ve -1 ile +1 arası değerler alır. Kovaryans her değeri alabileceğinden uygun bir korelasyon ölçütü değildir. Bu nedenle korelasyon ölçütü olarak korelasyon katsayısı kullanılır. Korelasyon katsayısı sıfıra ne kadar yakın ise x ve y değişkeni arasında zayıf, ±1 e yakınsa kuvvetli bir ilişkiden söz edilir.
56 Ölçülen büyüklüklerin gerçek büyüklükleri η x,η y, ölçüler ise l xi, l yi olsun; ε xi = η x -l xi ε yi = η y - l yi sapmaları ile varyans ve kovaryans için; m x 2 = ε x T ε x n, m y 2 = ε y T ε y n, m xy 2 = ε x T ε y n eşitlikleri geçerli olur Ölçülen büyüklüklerin gerçek değerleri bilinmiyorsa varyanslar ve kovaryanslar düzeltmeler yardımı ile belirlenir; m 2 x = V x T V x, m n 1 y 2 = V y T V y, m n 1 xy 2 = V x T V y n 1
57 r xy = m xy m x m y -1 r xy 1 olarak hesaplanır. r xx ve r yy ise otokorelasyon katsayılarıdır. Örnek; Her ikisi de n elemanlı x ve y kümesinin standart sapmaları σ x = 1.11, σ y =2.22 ve aralarındaki kovaryans σ xy = 1.25 olduğuna göre korelasyon katsayısını hesaplayınız
58 Leica TS15 marka uzaklık ölçerin ayarlanması ve bu aletle yapılan uzunluk ölçüleri arasındaki korelasyonların belirlenmesi amaçlanmaktadır. Ülke nirengi ağının Zonguldak/Merkez bazı bu aletle 30 u öğleden önce ve 30 u öğleden sonra olmak üzere 60 kez ölçülmüştür. Bu bazın invar telle ölçülüp indirgenmiş uzunluğunun m olduğu bilindiğine göre, bu aletle ölçülen uzunlukların ortalama hatalarını ve aralarındaki korelasyonları hesaplayınız.
59
60 x 1, x 2,..,x n normal dağılımlı rasgele değişkenler (ölçüler) bir x vektörü altında toplanırsa x vektörüne; x = x 1 x 2. x n T normal dağılımlı n boyutlu rasgele değişken adı verilir. μ = μ 1 ise; μ 2. μ n T Değişkenin beklenen değerler vektörü Buna göre x i -µ i farkları; x μ = x 1 μ 1 x 2 μ x n μ n T olur.
61 x μ x μ T çarpımının beklenen değeri ise nxn boyutlu bir matristir. E x μ x μ T = C xx Bu matrisin köşegen elemanlarının beklenen değerlerinin x i rasgele değişkeninin varyansları; E x i μ 2 2 i = σ i köşegeni dışındaki elemanların beklenen değerlerinin x i ve x k rasgele değişkenleri arasındaki kovaryanslar, E x i μ i (x k μ k ) = σ ik ve σ ik = σ ki olduğu göze alınırsa
62 C xx = 2 σ 1 σ 12 σ 1n σ 12 2 σ 2 σ 2n σ 1n σ 2n σ2 n matrisi elde edilir. C xx matrisine x vektörünün varyans-kovaryans matrisi denilir. x 1, x 2,..,x n rasgele değişkenleri arasında korelasyon yoksa C xx kovaryans matrisi köşegen matrise dönüşür. C xx = 2 σ σ σ n
63 Bir ölçünün varyansı küçükse doğruluğu yüksek, büyükse doğruluğu düşüktür denir. Buna göre doğruluk derecesi varyans büyüklüğü ile ters orantılıdır. Bu yüzden doğruluk ölçütü olarak varyanslar yanında onların tersleriyle orantılı, ağırlık adı verilen başka büyüklükler de kullanılır. Bu tanıma göre ağırlığı büyük olan bir ölçünün doğruluğu yüksek, ağırlığı küçük olanın doğruluğu düşüktür.
64 Varyansı σ i 2 olan bir ölçünün ağırlığı P i için; P i = σ o 2 σ i 2 (σ 0 2 :sabit, Birim ağırlıklı varyans) yazılabilir. matrisine bağımsız ölçüler için P P xx = 0 P P n ağırlık matrisi denilir.
65 Bağımsız ölçülerin C xx kovaryans matrisi ile bağımsız ölçülerin P xx ağırlık matrisi arasında; C xx = 2 σ σ σ n, P xx = P P P n P xx = σ C xx ilişkisi vardır.
66 C xx kovaryans matrisi, birim ağırlıklı varyans ile bölünürse ağırlık katsayıları (Kofaktör) matrisi; Q xx = 1 σ 0 2 C xx = Q 11 Q 12 Q 1n Q 12 Q 22 Q 2n Q 1n Q 2n Q nn, Q ii = 1 P i elde edilir. P xx = Q 1 xx = σ 2 0 C 1 xx ilişkisi ortaya çıkar.
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82 Hataların Yayılma Kanunu
83 Hata yüklü bir ölçüden faydalanılarak hesaplanabilen diğer bir büyüklük te hata yüklü olacaktır. Hesaplanan büyüklüklerdeki hataların ölçü hatalarının fonksiyonları biçiminde belirlenmesine Hata Yayılması denilir. Doğrultu, uzunluk, faz, kod, zaman vb. elemanlar direk gözlenir ve elde edilmek istenen diğer büyüklükler (genelde koordinatlar) bu ölçülerin matematiksel fonksiyonları yardımıyla hesaplanır. Ölçüler az ya da çok hatalı olduğu için onlardan elde edilen büyüklükler de hatalı olur. Fonksiyonlardan elde edilen büyüklüklerin ölçü hatalarından nasıl etkilendiklerini gösteren bağıntıya Hata Yayılma Kuralı denir. Ölçülen büyüklüklerin ortalama hatalarının bilindikleri durumlarda ölçülerin herhangi bir fonksiyonunun ortalama hatasının hesaplanması dengeleme hesabının çok sık rastlanan konularındandır. Hata yayılma kuralı sadece ilk ölçülere uygulanır.
84 Deneysel varyansları (karesel ortalama hataları) m 1 2 ve m 2 2, deneysel kovaryansları m 12 olan l 1 ve l 2 ölçülerinin herhangi iki fonksiyonu; x = f l 1, l 2 y = g l 1, l 2 biçiminde yazılabilir. Bu fonksiyonların ölçülere göre diferansiyelleri; dx = f l 1 dl 1+ f l 2 dl 2 dy = g l 1 dl 1+ g l 2 dl 2 olur. Kısmi türevlerde l 1 ve l 2 nin ölçülen değerleri yerine konularak; a 1 = f l 1, a 2 = f l 2, b 1 = g l 1, b 2 = g l 2 diferansiyelleri ; katsayıları hesaplanırsa, x ve y fonksiyonlarının dx = a 1 dl 1 + a 2 dl 2 dy = b 1 dl 1 + b 2 dl 2 olur. Gerçek hataların (ε) ölçülere göre çok küçük oldukları göz önüne alınarak diferansiyel artımlar yerine gerçek hatalar yazılırsa; ε x = a 1 ε 1 + a 2 ε 2 ε y = b 1 ε 1 + b 2 ε 2 elde edilir. Bu eşitliklere Gerçek Hataların Yayılma Kuralı denilir.
85 İlk ölçülerin n sayıda yinelendikleri varsayılırsa bunlar L 1 ve L 2 vektörlerinde toplanabilir. Bu durumda L 1 ve L 2 nin fonksiyonları olan x ve y büyüklükleri x ve y vektörlerini oluşturur. Bütün bu sayılan büyüklüklerin gerçek hataları ε 1, ε 2, ε x, ε y vektörlerinde toplanırsa; ε x = a 1 ε 1 + a 2 ε 2 ε y = b 1 ε 1 + b 2 ε 2 bağıntıları elde edilir. Bu eşitliklerin her iki tarafının karesi alınırsa; ε x T ε x = a 1 2 ε 1 T ε 1 + 2a 1 a 2 ε 1 T ε 2 +a 2 2 ε 2 T ε 2 ε y T ε y = b 1 2 ε 1 T ε 1 + 2b 1 b 2 ε 1 T ε 2 +ba 2 2 ε 2 T ε 2 ε x T ε y = a 1 b 1 ε 1 T ε 1 + a 1 b 2 + a 2 b 1 ε 1 T ε 1 + a 2 b 2 ε 2 T ε 2 olur. Bu eşitliklerin her iki tarafı ölçü sayısı olan n ye bölünerek deneysel varyansın tanımından; m x 2 = a 1 2 m a 1 a 2 m 12 + a 2 2 m 2 2 m y 2 = b 1 2 m b 1 b 2 m 12 + b 2 2 m 2 2 m xy = a 1 b 1 m a 1 b 2 + a 2 b 1 m 12 + a 2 b 2 m 2 2 bağıntıları elde edilir. Bu son bağıntılara Genel Hata Yayılma Kuralı denilir.
86 İlk ölçülerin (l 1, l 2 ) korelasyonsuz oldukları durumlarda m 12 = 0 olduğundan karesel ortalama hata bağıntıları; m x 2 = a 1 2 m a 2 2 m 2 2 m y 2 = b 1 2 m b 2 2 m 2 2 m xy = a 1 b 1 m a 2 b 2 m 2 2 biçimini alır. İlk ölçülerin herhangi bir fonksiyonu; f = F(l 1, l 2, l n ) olarak tanımlanırsa bu fonksiyonun ortalama hatası; m f = ± F l 1 2 m1 2 + F l 2 2 m F l n 2 mn 2 biçiminde yazılabilen Hata Yayılma Kuralı bağıntısından hesaplanır. Uyarılar; Hata yayılma kuralı yalnızca yeterince ölçü varsa uygulanır. Fazla ölçü varsa Hata Yayılma Kuralı uygulanmaz. Fonksiyonun kesin değeri ve ortalama hatası dengeleme hesabı yapılarak bulunur.
87
88
89
90 Bir ABC üçgeninin iki kenarı (c, b) ve aralarındaki α açısı ortalama hataları ile verilmiştir. Ölçüler arasında korelasyon bulunmadığına göre a kenarı ve karesel ortalama hatasını hesaplayınız. b=60.00 m ±2 cm, c=70.00 m ±3 cm, B α= g ±25 cc c a A α b C
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120 Ölçülerin duyarlıkları (ortalamaları ve ağırlıkları) ve aralarındaki korelasyonlar konusunda, dengelemeden önce (öncül, a-priori) elde bulunan bilgilere stokastik model denilir.
121 Fonksiyonel ve stokastik modeller dengeleme hesabının temelini oluştururlar. Söz konusu modeller dengelemeden önce kurulurlar. Ölçüler ile bilinmeyenler arasındaki geometrik ve fiziksel ilişkileri tam olarak yansıtmayan fonksiyonel modeller ile ölçülerin duyarlıklarını ve aralarındaki korelasyonları gerçekçi bir biçimde kapsamayan stokastik modeller Model Hataları na neden olurlar. Model hataları Dengeleme Hesabında en büyük sistematik hata kaynağıdır.
122 n: Ölçülerin sayısı u: Bilinmeyenlerin sayısı f: n-u; Fazla ölçü sayısı olmak üzere ; f>0 ise Ölçüler dengelenerek Kesin Değerler bulunur. f=0 ise cebrik çözüm yapılır. f<0 ise varsayımlara dayalı çözüm söz konusudur.
123
124
125
126
127
128 Dolaysız (Direkt) Ölçüler Dengelemesi Dolaylı (Endirekt) Ölçüler Dengelemesi Koşullu (Şartlı) Ölçüler Dengelemesi
129
130

131
132
133
134
135 Bir tek büyüklüğün belirlenmesi için yapılan duyarlıkları farklı, ilk bağımsız ve dolaysız gözlemleri l 1, l 2,,l n, bunların ağırlıklarını p 1, p 2,,p n, ile gösterelim. Söz konusu gözlemler ile bunların duyarlıkları arasındaki ilişkiler; ölçü+düzeltmesi=bilinmeyenin kesin değeri l i + v i = x v i = x l i Küçük sayılarla çalışmak için bilinmeyen x e x 0 yaklaşık değeri seçilir; x=x 0 +dx
136 v i =dx-(l i -x 0 ) ((l i -x 0 ): l i ve x 0 ın sayısal değerleri ile elde edilen büyüklüğe ötelenmiş ölçü gözüyle bakılarak; (l i -x 0 )= l i tanımı yapılırsa; v i = dx l i v 1 = dx l 1 v 2 = dx l 2.. v n = dx l n Düzeltme Denklemleri (Fonksiyonel Model)
137 l i ötelenmiş gözlemlerin ağırlıkları da p i olur ve bunlar stokastik modeli oluştururlar. p 1, p 2,.,p n (Stokastik Model) Bu durumda Gauss un en küçük kareler yöntemine göre dengeleme ilkesi (Amaç Fonksiyonu); [pvv]=min. Biçimindedir.
138 Düzeltme Denklemleri v i = dx l i Ağırlık p i v 1 = dx l 1 p 1 v 2 = dx l 2 p v n = dx l n p n (Matematik Model)
139 Matematik model bağıntılarında her iki tarafın karesi alınıp, ilgili ağırlıklarla çarpıldıktan sonra toplamları oluşturulursa; pvv = dx 2 p 2dx pl + pl l elde edilir. Amaç fonksiyonu [pvv]=min. İçin, eşitliğin sağ tarafının dx e göre türevi sıfıra eşitlenerek; pvv = 2 p dx 2 dx pl = 0 p dx pl = 0 Normal Denklem dx = pl p Dengeleme Bilinmeyeninin Kesin Değeri x = x 0 + dx Kesin Değer
140 [pv]=0 pvv = pl l dx pl 1. Kontrol pvv = pl l pl 2 p 2. Kontrol
141 m 0 = ± pvv n 1 Birim Ölçünün Ortalama Hatası m i = ± m 0 p i Gözlemlerin Ortama Hataları m x = ± m 0 [p] Hatası Genel Aritmetik Ortalamanın Ortalama

142 Nivelman Ölçüleri ile Bir Noktaya Yükseklik Taşıma Ölçüler l'i Geçki Uzunluğu (Si) Ağırlık Düzeltme Ortalama Hata 157,0480 3,10 157,0520 2,00 157,0550 6,10 157,0490 5,30 157, ,20
143 DOLAYLI ÖLÇÜLER DENGELEMESİ NİVELMAN AĞLARININ DENGELENMESİ TRİGONOMETRİK NİVELMAN AĞLARININ DENGELENMESİ GPS AĞLARININ DENGELENMESİ GPS NİVELMANI SERBEST AĞLARIN DENGELENMESİ MODEL HİPOTEZİNİN TESTİ ve UYUŞUMSUZ ÖLÇÜLER TESTİ İKİ BOYUTLU BENZERLİK (HELMERT) DÖNÜŞÜMÜ
144 Belirlenmesi istenen, bir tek büyüklük ise Dolaysız Ölçüler Dengelemesi söz konusudur. Örnek olarak bir uzunluk ya da bir açı n kez ölçülmüş ise Dolaysız Ölçüler dengelemesi uygulanır. Birden çok sayıda bilinmeyenin bir kerede belirlenmesi ya da bilinmeyenler yerine onları hesaplamaya yarayan büyüklükler ölçülmüş ise, Dolaylı Ölçüler dengelemesi uygulanır. Jeodezide genellikle bulunması istenen büyüklükler doğrudan ölçülmez. İstenen değer, ölçülen diğer elemanlar yardımı ile hesaplanır.
145 n: Ölçülerin sayısı u: Bilinmeyenlerin sayısı f: n-u; Fazla ölçü sayısı olmak üzere ; f>0 ise Ölçüler dengelenerek Kesin Değerler bulunur. f=0 ise cebrik çözüm yapılır. f<0 ise varsayımlara dayalı çözüm söz konusudur.
146 Dolaylı ölçüler dengelemesinde ilk aşama, bilinmeyenlerin seçimidir. Bilinmeyenlerin sayısı, problemin geometrik anlamda çözümü ya da çizimi için gerekli ölçü sayısıdır. Hangi büyüklüğün bilinmeyen olarak seçilmesi gerektiği, çoğu kez önceden bilinir. Nokta kestirmelerinde, kestirilecek noktaların koordinatları, nivelman ağlarında noktaların yükseklikleri ya da yükseklik farkları gibi. Dolaylı ölçüler dengelemesinde tüm ölçüler kullanılarak bilinmeyenler, dengeli ölçüler, bilinmeyenlerin fonksiyonları ve bu büyüklüklerin standart sapması belirlenir.
147 Dengelenmiş ölçüler ile bilinmeyenler arasında ; l+v=ax (ölçü+düzeltmesi=bilinmeyenlerin fonksiyonu) Biçiminde yazılan eşitliklere düzeltme denklemi adı verilir. Bu denklemlerin sayısı ölçü sayısına eşittir. v = Ax l (Matris formunda fonksiyonel model) v= Düzeltmeler vektörü A=Katsayılar Matrisi x=bilinmeyenler vektörü -l=sabit Terimler vektörü
148 Doğrusal olmayan denklem sistemlerinin direkt olarak çözümü mümkün değildir. Bu amaçla yazılan ilk düzeltme denklemleri bilinmeyenlerin yaklaşık değerleri alınarak Taylor açınımı ile doğrusallaştırılır. Düzeltme denklemlerinin tümü doğrusal olsa bile, hesaplama kolaylığı ve yuvarlatma hata etkisinin azaltılması amacı ile bilinmeyenler yerine genelde yaklaşık değerleri seçilir.
149 v = Ax l şeklindeki u bilinmeyenli n denklemden x bilinmeyenlerinin EKK koşulu; v t Pv = min. Olacak şekilde belirlenmesi gerekir. v yerine konulursa; v t Pv = Ax l T P(Ax l) olur. v t Pv minimum olabilmesi için bilinmeyenlere göre türevi sıfır olmalıdır. Normal denklemlerin çözümü bize x bilinmeyenler vektörünü verir. A T PAx A T Pl = 0 : Normal Denklemler x = (A T PA) 1 A T Pl : çözüm, x bilinmeyenler vektörü
150
151
152
153
154
155
156
157
158
159

160 Şekildeki ikizkenar üçgenin eşit kenarları, açıları ve yüksekliği ölçülmüştür. İkiz kenar ve açılar cinsinden düzeltme denklemlerini yazınız i L i m m m gon gon gon
161 Matris formunda bir fonksiyonel model verilmiştir. Bu modele ait stokastik model ise tabloda verildiği gibidir. Öncül karesel ortalama hata s 0 =±0.90 mm olduğuna göre duyarlıkları farklı olan bu ölçüleri dolaylı ölçüler yöntemine göre dengeleyiniz v dx v 2 = * dy v s 0 = 0.90 ms 1 = 0.65 rij = 0.50 ms 2 = 0.81 ms 3 = 0.36
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207 Bir Referans sisteminin gerçekleştirilebilmesi için o sistemde koordinatı bilinen noktalara ihtiyaç vardır. Referans sistemini gerçekleştirmek amacıyla tesis edilen noktalara kontrol noktası, bu noktaların meydana getirdiği yapıya da kontrol ağları adı verilir.
208 Yatay kontrol ağları Düşey kontrol ağları Üç boyutlu kontrol ağları
209 Kontrol noktalarının konumunu doğrudan doğruya belirlemek mümkün değildir; dolaylı gözlemler yapmak gerekir. Yatay kontrol ağları: Kenar, doğrultu ve açıklık açısı gözlemleri Düşey kontrol ağları: Nivelman Üç boyutlu kontrol ağları: Kenar, doğrultu, düşey açı veya GPS baz vektörleri
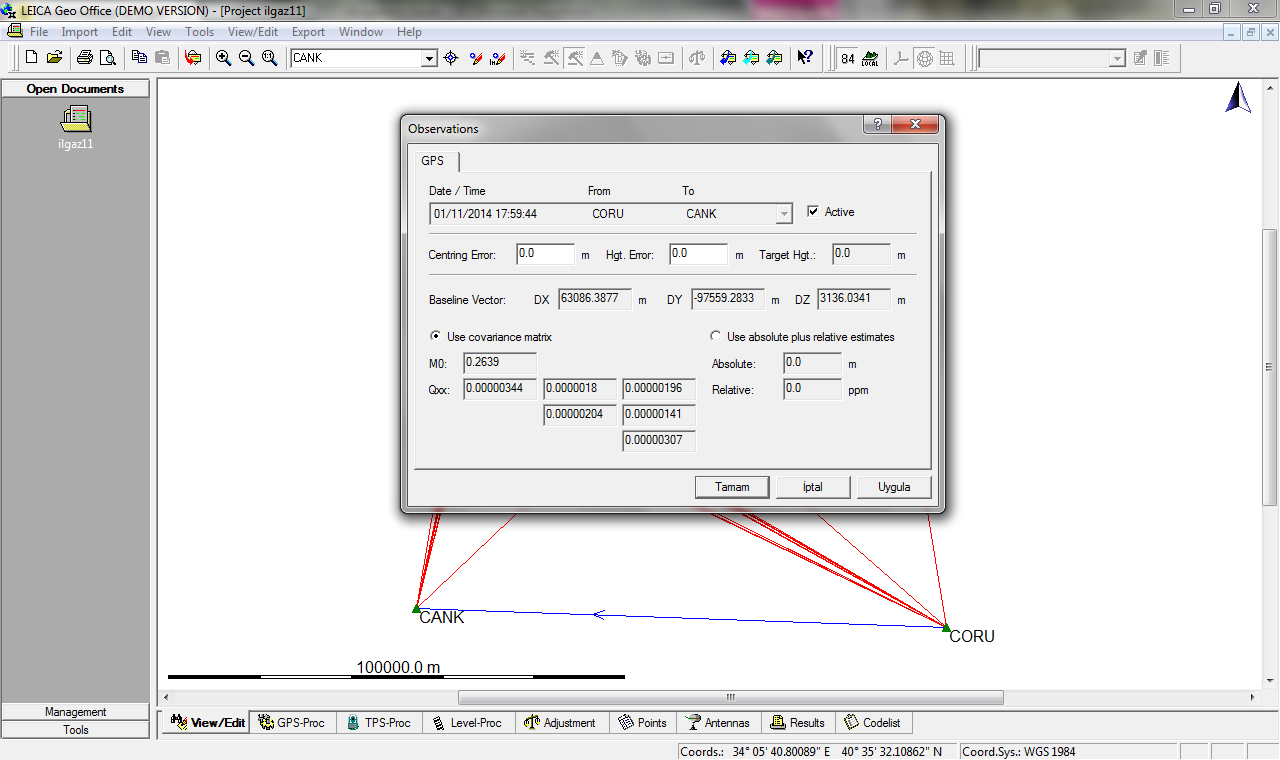
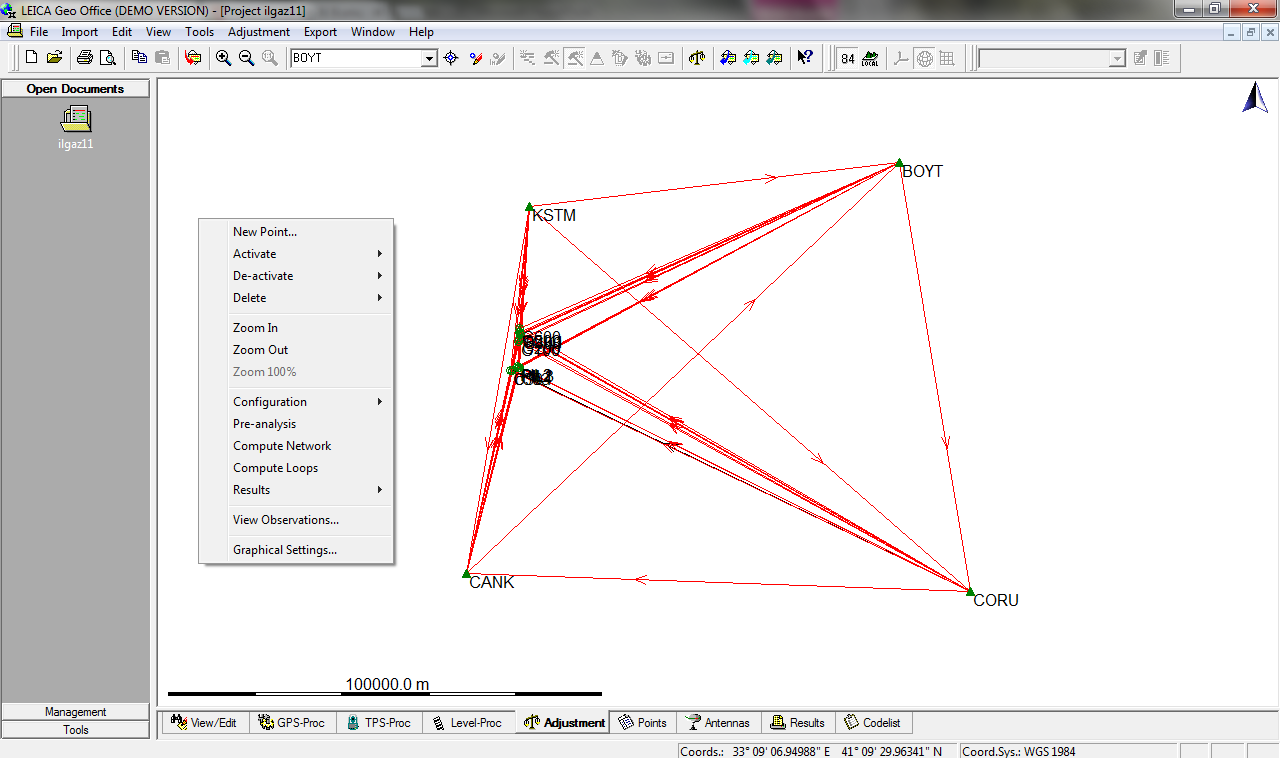
210 Doğrultu ağlarında doğrultular, kenar ağlarında uzunluklar, doğrultu-kenar ağlarında hem doğrultular ve hem de uzunluklar, nivelman ağlarında yükseklik farkları, trigonometrik nivelman ağlarında düşey açılar ya da yükseklik farkları (düşey açılardan hesaplanır) ölçülür. GPS ağlarında üç boyutlu koordinat farkları (kod, faz ve zaman ölçülerinden) ölçülür. Bu ölçüler ilgili jeodezik ağın belirli bir koordinat sisteminde yeri, yönü ve ölçeği konusunda hiçbir bilgi içermezler. Bu ölçüler yardımıyla oluşturulan jeodezik ağlara SERBEST ağlar denir.
211 Kontrol ağları üzerinde gerçekleştirilen gözlemler ağın ancak iç geometrisini belirler. Bir jeodezik ağın tanımlı bir koordinat sistemindeki yeri, ölçeği ve yönü konusunda bilgi veren parametrelere DATUM parametreleri denir. Bir nivelman veya trigonometrik nivelman ağının bir koordinat sisteminde tanımlı olabilmesi için en az bir noktasının yükseklik koordinatı o koordinat sisteminde bilinmesi gerekir. Bir doğrultu ağının bir koordinat sisteminde tanımlı olabilmesi için en az iki noktasının koordinatları bilinmelidir. Bir doğrultu-kenar ağının bir koordinat sisteminde tanımlı olabilmesi için en az bir noktasının koordinatları bilinmelidir ve en az bir doğrultusunun yönü bilinmelidir. Bir GPS ağının bir koordinat sisteminde tanımlı olabilmesi için en az bir noktasının X, Y ve Z koordinatları o koordinat sisteminde bilinmesi gerekir.
212 Ağın bir koordinat sisteminde konumlandırılabilmesi için gerekli olan parametrelere dış parametreler bunların sayısına datum defekti adı verilir.
213 Kullanılacak ölçme yöntemi ve jeodezik model Doğruluk ölçütleri o Global doğruluk ölçütleri o Lokal doğruluk ölçütleri Güvenirlik Ekonomi Yüksek doğruluk gereksinimleri nedeniyle jeodezik ölçmelerde noktalar daima bir ağ mantığı içerisinde ele alınır ve nokta konumları ağ üzerinde gerçekleştirilen ölçülerin bir dengeleme hesabına tabi tutulmasıyla elde edilir.
214 Serbest ağ dengelemesi Tüm iz minimum Kısmi iz minimum Minimuma dayalı (zorlamasız) dengeleme Dayalı (zorlamalı) dengeleme
215 Bu tür dengelemede hiçbir ağ noktasının koordinatı sabit kabul edilmez. Bütün nokta koordinatlarının hatalar içerdiği düşünülür. Bir ağ dengelemesinde ağdaki bazı noktalara dayalı olarak koordinatları hesaplanan yeni noktaların koordinatları ve koordinatların doğrulukları, koordinatı değişmez alınan noktalardan etkilenir. Çünkü bu ağda yapılan ölçülere ait hatalar sadece yeni noktaların koordinatlarına dağıtılır. Sabit alınan noktalardan uzaklaştıkça biriken hatalar yeni noktaların konum hatalarını büyütür. Bu bağlamda noktaların konum doğruluğu datum seçimine bağlı olarak değişir. Bu durumdan etkilenmemek için ağlar serbest ağ dengelemesi (tüm iz minimum yöntemine göre dengeleme) ile dengelenir. Bu yöntemde bir ağda yapılan tüm ölçülerden meydana gelen hatalar tüm nokta koordinatlarına dağıtılır.
216 Serbest ağ dengelemesi yöntemi özellikle deformasyon araştırma çalışmalarında kullanılır. Deformasyon izleme amacıyla oluşturulan jeodezik ağlarda noktaların koordinatları ve koordinatların doğrulukları deformasyon analizinde kullanılan giriş değerlerdir. Deformasyon analizi ve yorumu açısından bu değerlerin serbest ağ dengelemesiyle elde edilmiş olunması tercih edilmektedir. Serbest ağ dengelemesinde tüm noktalar bilinmeyen noktalar olarak ele alınır. Bu nedenle normal denklem katsayıları matrisinin determinantı sıfır olur. Yani bu matris singüler bir matristir.
217 Tüm iz minimum yöntemi, ağın tüm noktalarını içeren küçültülmüş koordinat bilinmeyenleri vektörünün normunun (bilinmeyenlerin kareleri toplamı) ve ağırlık katsayıları matrisinin izinin (Köşegen elemanları toplamı) en küçük olmasını, başka bir değişle ağın tüm noktalarının datum tanımına katkıda bulunmasını sağlar. Tüm iz minimum yöntemine göre dengelemenin doğrusallaştırılmış fonksiyonel modeli, düzeltme denklemleriyle koordinat bilinmeyenleri arasındaki koşul denklemlerinden oluşur.
218 v=ax g l (Düzeltme Denklemleri) G T x g = 0 (Koşul Denklemleri) f = n u + d (Serbestlik Derecesi) (n : ölçü sayısı, u: Bilinmeyen sayısı, d: Defekt) x g koordinat bilinmeyenleri vektörü, ağın tüm noktalarını içerir. Bu çözümde ağın datumu G matrisi ile tanımlanır. Ve tüm noktalar datum tanımına katılır. Koşul denklemlerinin sayısı datum parametrelerinin sayısına eşittir. Nokta sayısı p ve buna göre koordinat bilinmeyenlerinin sayısı bir boyutlu ağlarda u=p, iki boyutlu ağlarda u=2p ve üç boyutlu ağlarda u=3 p ise G matrisinin boyutları uxd dir.
219
220
221 Tüm iz minimum yöntemi, ağın tüm noktalarını içeren küçültülmüş koordinat bilinmeyenleri vektörünün normunun (Bilinmeyenlerin bir bölümünün kareleri toplamı) ve ağırlık katsayıları matrisinin buna karşılık alt matrisinin izinin (köşegen elemanları toplamı) en küçük olmasını sağlar. Başka bir değişle ağın noktalarından yalnızca bir bölümünün datum tanımına katkıda bulunmasını sağlar.
222 Bu dengelemenin doğrusallaştırılmış fonksiyonel modelinin Tüm iz minimum yönteminden farkı G matrisi yerine, datumu tanımlayan ve G matrisinden dönüştürülen bir B matrisinin geçmesidir. v=ax g l (Tüm iz Min. Düzeltme Denklemleri) G T x g = 0 (Tüm iz Min. Koşul Denklemleri) v=ax g l (Kısmi iz Min. Düzeltme Denklemleri) B T x g = 0 (Kısmi iz Min. Koşul Denklemleri)
223 Q i = N = N + B i B i T 1 x i = Q i n
224
225
226
227
228
229
230
231
232
233
234
235 Dengeleme Hesabı (Kitap), Prof. Dr. Sebahattin BEKTAŞ (Samsun 2002) Dengeleme Hesabı (Kitap), Hüseyin DEMİREL (YTÜ 2005) Dengeleme Hesabı Cilt I-II-III (Kitap), Ergün ÖZTÜRK (Trabzon 1991) Dengeleme Hesabı Ders Notları, Şenol Hakan KUTOĞLU (BEUN, 2008) Dengeleme Hesabı Ders Notları, Temel BAYRAK (Gümüşhane, 2011)
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Dengeleme Hesabı Adımları, En Küçük Kareler İlkesine Giriş, Korelasyon Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita
DENGELEME HESABI-I DERS NOTLARI Dengeleme Hesabı Adımları, En Küçük Kareler İlkesine Giriş, Korelasyon Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Ağırlık ve Ters Ağırlık (Kofaktör) Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 016 AĞIRLIK
DENGELEME HESABI-I DERS NOTLARI Ağırlık ve Ters Ağırlık (Kofaktör) Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 016 AĞIRLIK
DERS 3 ÖLÇÜ HATALARI Kaynak: İ.ASRİ
 Ölçme Bilgisi DERS 3 ÖLÇÜ HATALARI Kaynak: İ.ASRİ Çizim Hassasiyeti Haritaların çiziminde veya haritadan bilgi almada ne kadar itina gösterilirse gösterilsin kaçınılmayacak bir hata vardır. Buna çizim
Ölçme Bilgisi DERS 3 ÖLÇÜ HATALARI Kaynak: İ.ASRİ Çizim Hassasiyeti Haritaların çiziminde veya haritadan bilgi almada ne kadar itina gösterilirse gösterilsin kaçınılmayacak bir hata vardır. Buna çizim
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Ağırlıkları Eşit Dolaysız (Direkt) Ölçüler Dengelemesi Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü
DENGELEME HESABI-I DERS NOTLARI Ağırlıkları Eşit Dolaysız (Direkt) Ölçüler Dengelemesi Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ. Prof. Dr. Mualla YALÇINKAYA
 JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ Prof. Dr. Mualla YALÇINKAYA Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2018 DOĞRULUK ve DUYARLIK (Hassasiyet) DOĞRULUK ve DUYARLIK Doğruluk,
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ Prof. Dr. Mualla YALÇINKAYA Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2018 DOĞRULUK ve DUYARLIK (Hassasiyet) DOĞRULUK ve DUYARLIK Doğruluk,
Hatalar Bilgisi ve İstatistik Ders Kodu: Kredi: 3 / ECTS: 5
 Ders Kodu: 0010070021 Kredi: 3 / ECTS: 5 Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya 07.01.2015 1 Giriş 2 Giriş Matematiksel istatistiğin konusu yığın
Ders Kodu: 0010070021 Kredi: 3 / ECTS: 5 Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya 07.01.2015 1 Giriş 2 Giriş Matematiksel istatistiğin konusu yığın
OKAN ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ DENGELEME HESABI DERS NOTLARI BÖLÜM 1-2
 OKAN ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ DENGELEME HESABI DERS NOTLARI BÖLÜM 1- Doç.Dr.Erol YAVUZ İstanbul 01 HATA KURAMI Jeodezik Amaçlı Ölçüler ve Hataları Dengeleme
OKAN ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ DENGELEME HESABI DERS NOTLARI BÖLÜM 1- Doç.Dr.Erol YAVUZ İstanbul 01 HATA KURAMI Jeodezik Amaçlı Ölçüler ve Hataları Dengeleme
Jeodezide Yaklaşım Yöntemleri: Enterpolasyon ve Kollokasyon
 Jeodezide Yöntemleri: ve Lisansüstü Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Fen Bilimleri Enstitüsü e-posta: austun@selcuk.edu.tr Konya, 2007 A. Üstün yöntemleri 1 / 28 Bir soruyu ya
Jeodezide Yöntemleri: ve Lisansüstü Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Fen Bilimleri Enstitüsü e-posta: austun@selcuk.edu.tr Konya, 2007 A. Üstün yöntemleri 1 / 28 Bir soruyu ya
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Giriş, Hata ve Düzeltme Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2016 HAFTALIK DERS
DENGELEME HESABI-I DERS NOTLARI Giriş, Hata ve Düzeltme Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2016 HAFTALIK DERS
Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü TOPOGRAFYA (HRT3350)
") Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü Ders Adı Kodu Yerel Kredi ECTS Ders (saat/hafta) Uygulama (saat/hafta) Laboratuvar (saat/hafta) Topografya HRT3350 3 4 3 0 0 DERSİN
Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü Ders Adı Kodu Yerel Kredi ECTS Ders (saat/hafta) Uygulama (saat/hafta) Laboratuvar (saat/hafta) Topografya HRT3350 3 4 3 0 0 DERSİN
JEODEZİK AĞLARIN OPTİMİZASYONU
 JEODEZİK AĞLARIN OPTİMİZASYONU Jeodezik Ağların Tasarımı 10.HAFTA Dr.Emine Tanır Kayıkçı,2017 OPTİMİZASYON Herhangi bir yatırımın gerçekleştirilmesi sırasında elde bulunan, araç, hammadde, para, işgücü
JEODEZİK AĞLARIN OPTİMİZASYONU Jeodezik Ağların Tasarımı 10.HAFTA Dr.Emine Tanır Kayıkçı,2017 OPTİMİZASYON Herhangi bir yatırımın gerçekleştirilmesi sırasında elde bulunan, araç, hammadde, para, işgücü
İKİ BOYUTLU AĞLARDA AĞIRLIK SEÇİMİNİN DENGELEME SONUÇLARINA ETKİSİ VE GPS KOORDİNATLARI İLE KARŞILAŞTIRILMASI
 SELÇUK TEKNİK ONLİNE DERGİSİ / ISSN 1302 6178 Volume 1, Number: 3 2001 İKİ BOYUTLU AĞLARDA AĞIRLIK SEÇİMİNİN DENGELEME SONUÇLARINA ETKİSİ VE GPS KOORDİNATLARI İLE KARŞILAŞTIRILMASI Doç Dr. Cevat İNAL S.Ü.
SELÇUK TEKNİK ONLİNE DERGİSİ / ISSN 1302 6178 Volume 1, Number: 3 2001 İKİ BOYUTLU AĞLARDA AĞIRLIK SEÇİMİNİN DENGELEME SONUÇLARINA ETKİSİ VE GPS KOORDİNATLARI İLE KARŞILAŞTIRILMASI Doç Dr. Cevat İNAL S.Ü.
Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü TOPOGRAFYA (HRT3351) Yrd. Doç. Dr. Ercenk ATA
 Yrd. Doç. Dr. Ercenk ATA") Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü Ölçme Hataları Ölçme Hatası Herhangi bir ölçme aleti ile yapılan ölçüm sonucu bulunan değer yaklaşık değerdir. Bir büyüklük aynı ölçme
Yıldız Teknik Üniversitesi İnşaat Fakültesi Harita Mühendisliği Bölümü Ölçme Hataları Ölçme Hatası Herhangi bir ölçme aleti ile yapılan ölçüm sonucu bulunan değer yaklaşık değerdir. Bir büyüklük aynı ölçme
GPS ağlarının dengelenmesinden önce ağın iç güvenirliğini artırmak ve hataları elimine etmek için aşağıda sıralanan analizler yapılır.
 13. GPS AĞLARININ DENGELENMESİ 13.1 GPS ÖLÇMELERİ GPS ( Global Positioning System ) alıcıları kullanılarak yer istasyonu ile uydu arasındaki uzunluklar ölçülür ve noktaların konumları belirlenir. GPS ile
13. GPS AĞLARININ DENGELENMESİ 13.1 GPS ÖLÇMELERİ GPS ( Global Positioning System ) alıcıları kullanılarak yer istasyonu ile uydu arasındaki uzunluklar ölçülür ve noktaların konumları belirlenir. GPS ile
2 Hata Hesabı. Hata Nedir? Mutlak Hata. Bağıl Hata
 Hata Hesabı Hata Nedir? Herhangi bir fiziksel büyüklüğün ölçülen değeri ile gerçek değeri arasındaki farka hata denir. Ölçülen bir fiziksel büyüklüğün sayısal değeri, yapılan deneysel hatalardan dolayı
Hata Hesabı Hata Nedir? Herhangi bir fiziksel büyüklüğün ölçülen değeri ile gerçek değeri arasındaki farka hata denir. Ölçülen bir fiziksel büyüklüğün sayısal değeri, yapılan deneysel hatalardan dolayı
Âna nirengi doğrultuları için p = 1 m 2 o Ara nirengi doğrultuları için p a =------------ m\
 4. ÖLÇÜLERİN AĞIRLIKLARININ SAPTANMASI Ana, ara ve tamamlayıcı nirengi doğrultularının herbiri gruplar halinde ele alınarak bunların ortalama hatalarının öncül (a priori) değerleri, üçgen kapanmalarından
4. ÖLÇÜLERİN AĞIRLIKLARININ SAPTANMASI Ana, ara ve tamamlayıcı nirengi doğrultularının herbiri gruplar halinde ele alınarak bunların ortalama hatalarının öncül (a priori) değerleri, üçgen kapanmalarından
Matris Cebiriyle Çoklu Regresyon Modeli
 Matris Cebiriyle Çoklu Regresyon Modeli Hüseyin Taştan Mart 00 Klasik Regresyon Modeli k açıklayıcı değişkenden oluşan regresyon modelini her gözlem i için aşağıdaki gibi yazabiliriz: y i β + β x i + β
Matris Cebiriyle Çoklu Regresyon Modeli Hüseyin Taştan Mart 00 Klasik Regresyon Modeli k açıklayıcı değişkenden oluşan regresyon modelini her gözlem i için aşağıdaki gibi yazabiliriz: y i β + β x i + β
KADASTRO HARİTALARININ SAYISALLAŞTIRILMASINDA KALİTE KONTROL ANALİZİ
 KADASTRO HARİTALARININ SAYISALLAŞTIRILMASINDA KALİTE KONTROL ANALİZİ Yasemin ŞİŞMAN, Ülkü KIRICI Sunum Akış Şeması 1. GİRİŞ 2. MATERYAL VE METHOD 3. AFİN KOORDİNAT DÖNÜŞÜMÜ 4. KALİTE KONTROL 5. İRDELEME
KADASTRO HARİTALARININ SAYISALLAŞTIRILMASINDA KALİTE KONTROL ANALİZİ Yasemin ŞİŞMAN, Ülkü KIRICI Sunum Akış Şeması 1. GİRİŞ 2. MATERYAL VE METHOD 3. AFİN KOORDİNAT DÖNÜŞÜMÜ 4. KALİTE KONTROL 5. İRDELEME
Genel olarak test istatistikleri. Merkezi Eğilim (Yığılma) Ölçüleri Dağılım (Yayılma) Ölçüleri. olmak üzere 2 grupta incelenebilir.
 Ölçüleri Dağılım (Yayılma) Ölçüleri. olmak üzere 2 grupta incelenebilir.") 4.SUNUM Genel olarak test istatistikleri Merkezi Eğilim (Yığılma) Ölçüleri Dağılım (Yayılma) Ölçüleri olmak üzere 2 grupta incelenebilir. 2 Ranj Çeyrek Kayma Çeyrekler Arası Açıklık Standart Sapma Varyans
4.SUNUM Genel olarak test istatistikleri Merkezi Eğilim (Yığılma) Ölçüleri Dağılım (Yayılma) Ölçüleri olmak üzere 2 grupta incelenebilir. 2 Ranj Çeyrek Kayma Çeyrekler Arası Açıklık Standart Sapma Varyans
İstatistik ve Olasılık
 İstatistik ve Olasılık Ders 8: Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır. Bu anlamda, anakütleden çekilen
İstatistik ve Olasılık Ders 8: Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır. Bu anlamda, anakütleden çekilen
MÜHENDİSLİK ÖLÇMELERİ UYGULAMASI (HRT4362) 8. Yarıyıl
 8. Yarıyıl") İnşaat Fakültesi Harita Mühendisliği Bölümü Ölçme Tekniği Anabilim Dalı MÜHENDİSLİK ÖLÇMELERİ UYGULAMASI (HRT4362) 8. Yarıyıl D U L K Kredi 2 0 2 3 ECTS 2 0 2 3 UYGULAMA-1 ELEKTRONİK ALETLERİN KALİBRASYONU
İnşaat Fakültesi Harita Mühendisliği Bölümü Ölçme Tekniği Anabilim Dalı MÜHENDİSLİK ÖLÇMELERİ UYGULAMASI (HRT4362) 8. Yarıyıl D U L K Kredi 2 0 2 3 ECTS 2 0 2 3 UYGULAMA-1 ELEKTRONİK ALETLERİN KALİBRASYONU
Örnek 4.1: Tablo 2 de verilen ham verilerin aritmetik ortalamasını hesaplayınız.
 .4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
.4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
İstatistik ve Olasılık
 İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
İstatistik ve Olasılık KORELASYON ve REGRESYON ANALİZİ Doç. Dr. İrfan KAYMAZ Tanım Bir değişkenin değerinin diğer değişkendeki veya değişkenlerdeki değişimlere bağlı olarak nasıl etkilendiğinin istatistiksel
Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi
 JEODEZİ 6 1 Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi Jeodezik gözlemler, hesaplamalarda kullanılmadan önce, referans elipsoidin yüzeyine indirgenir. Bu işlem, arazide yapılan gözlemler l jeoidin
JEODEZİ 6 1 Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi Jeodezik gözlemler, hesaplamalarda kullanılmadan önce, referans elipsoidin yüzeyine indirgenir. Bu işlem, arazide yapılan gözlemler l jeoidin
3. TAHMİN En Küçük Kareler (EKK) Yöntemi 1
 Yöntemi 1") 3. TAHMİN 3.1. En Küçük Kareler (EKK) Yöntemi 1 En Küçük Kareler (EKK) yöntemi, regresyon çözümlemesinde en yaygın olarak kullanılan, daha sonra ele alınacak bazı varsayımlar altında çok aranan istatistiki
3. TAHMİN 3.1. En Küçük Kareler (EKK) Yöntemi 1 En Küçük Kareler (EKK) yöntemi, regresyon çözümlemesinde en yaygın olarak kullanılan, daha sonra ele alınacak bazı varsayımlar altında çok aranan istatistiki
Temel İstatistik. Y.Doç.Dr. İbrahim Turan Mart Tanımlayıcı İstatistik. Dağılımları Tanımlayıcı Ölçüler Dağılış Ölçüleri
 Temel İstatistik Tanımlayıcı İstatistik Dağılımları Tanımlayıcı Ölçüler Dağılış Ölçüleri Y.Doç.Dr. İbrahim Turan Mart 2011 DAĞILIM / YAYGINLIK ÖLÇÜLERİ Verilerin değişkenlik durumu ve dağılışın şeklini
Temel İstatistik Tanımlayıcı İstatistik Dağılımları Tanımlayıcı Ölçüler Dağılış Ölçüleri Y.Doç.Dr. İbrahim Turan Mart 2011 DAĞILIM / YAYGINLIK ÖLÇÜLERİ Verilerin değişkenlik durumu ve dağılışın şeklini
RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI. Yrd. Doç. Dr. Emre ATILGAN
 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Yrd. Doç. Dr. Emre ATILGAN 1 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Olasılığa ilişkin olayların çoğunluğunda, deneme sonuçlarının bir veya birkaç yönden incelenmesi
RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Yrd. Doç. Dr. Emre ATILGAN 1 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Olasılığa ilişkin olayların çoğunluğunda, deneme sonuçlarının bir veya birkaç yönden incelenmesi
Lineer Denklem Sistemleri Kısa Bilgiler ve Alıştırmalar
 Lineer Denklem Sistemleri Kısa Bilgiler ve Alıştırmalar Bir Matrisin Rankı A m n matrisinin determinantı sıfırdan farklı olan alt kare matrislerinin boyutlarının en büyüğüne A matrisinin rankı denir. rank(a)
Lineer Denklem Sistemleri Kısa Bilgiler ve Alıştırmalar Bir Matrisin Rankı A m n matrisinin determinantı sıfırdan farklı olan alt kare matrislerinin boyutlarının en büyüğüne A matrisinin rankı denir. rank(a)
13. Olasılık Dağılımlar
 13. Olasılık Dağılımlar Mühendislik alanında karşılaşılan fiziksel yada fiziksel olmayan rasgele değişken büyüklüklerin olasılık dağılımları için model alınabilecek çok sayıda sürekli ve kesikli fonksiyon
13. Olasılık Dağılımlar Mühendislik alanında karşılaşılan fiziksel yada fiziksel olmayan rasgele değişken büyüklüklerin olasılık dağılımları için model alınabilecek çok sayıda sürekli ve kesikli fonksiyon
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
Merkezi Yığılma ve Dağılım Ölçüleri
 1.11.013 Merkezi Yığılma ve Dağılım Ölçüleri 4.-5. hafta Merkezi eğilim ölçüleri, belli bir özelliğe ya da değişkene ilişkin ölçme sonuçlarının, hangi değer etrafında toplandığını gösteren ve veri grubunu
1.11.013 Merkezi Yığılma ve Dağılım Ölçüleri 4.-5. hafta Merkezi eğilim ölçüleri, belli bir özelliğe ya da değişkene ilişkin ölçme sonuçlarının, hangi değer etrafında toplandığını gösteren ve veri grubunu
1. BÖLÜM Polinomlar BÖLÜM II. Dereceden Denklemler BÖLÜM II. Dereceden Eşitsizlikler BÖLÜM Parabol
 ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
ORGANİZASYON ŞEMASI . BÖLÜM Polinomlar... 7. BÖLÜM II. Dereceden Denklemler.... BÖLÜM II. Dereceden Eşitsizlikler... 9. BÖLÜM Parabol... 5 5. BÖLÜM Trigonometri... 69 6. BÖLÜM Karmaşık Sayılar... 09 7.
TANIMLAYICI İSTATİSTİKLER
 TANIMLAYICI İSTATİSTİKLER Tanımlayıcı İstatistikler ve Grafikle Gösterim Grafik ve bir ölçüde tablolar değişkenlerin görsel bir özetini verirler. İdeal olarak burada değişkenlerin merkezi (ortalama) değerlerinin
TANIMLAYICI İSTATİSTİKLER Tanımlayıcı İstatistikler ve Grafikle Gösterim Grafik ve bir ölçüde tablolar değişkenlerin görsel bir özetini verirler. İdeal olarak burada değişkenlerin merkezi (ortalama) değerlerinin
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislikte İstatistiksel Yöntemler
 Mühendislikte İstatistiksel Yöntemler BÖLÜM 7 TAHMİNLER Yrd. Doç. Dr. Fatih TOSUNOĞLU 1 Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır.
Mühendislikte İstatistiksel Yöntemler BÖLÜM 7 TAHMİNLER Yrd. Doç. Dr. Fatih TOSUNOĞLU 1 Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır.
İÇİNDEKİLER. BÖLÜM 1 Değişkenler ve Grafikler 1. BÖLÜM 2 Frekans Dağılımları 37
 İÇİNDEKİLER BÖLÜM 1 Değişkenler ve Grafikler 1 İstatistik 1 Yığın ve Örnek; Tümevarımcı ve Betimleyici İstatistik 1 Değişkenler: Kesikli ve Sürekli 1 Verilerin Yuvarlanması Bilimsel Gösterim Anlamlı Rakamlar
İÇİNDEKİLER BÖLÜM 1 Değişkenler ve Grafikler 1 İstatistik 1 Yığın ve Örnek; Tümevarımcı ve Betimleyici İstatistik 1 Değişkenler: Kesikli ve Sürekli 1 Verilerin Yuvarlanması Bilimsel Gösterim Anlamlı Rakamlar
SÜREKLİ RASSAL DEĞİŞKENLER
 SÜREKLİ RASSAL DEĞİŞKENLER Sürekli Rassal Değişkenler Sürekli Rassal Değişken: Değerleriölçümyadatartımla elde edilen, bir başka anlatımla sayımla elde edilemeyen, değişkene sürekli rassal değişken denir.
SÜREKLİ RASSAL DEĞİŞKENLER Sürekli Rassal Değişkenler Sürekli Rassal Değişken: Değerleriölçümyadatartımla elde edilen, bir başka anlatımla sayımla elde edilemeyen, değişkene sürekli rassal değişken denir.
GPS/INS Destekli Havai Nirengi
 GPS/INS Destekli Havai Nirengi GPS/INS (IMU) destekli hava nirengide izdüşüm merkezi koordinatları (WGS84) ve dönüklükler direk ölçülür. İzdüşüm merkezi koordinatları kinematik GPS ile ölçülür. GPS ile
GPS/INS Destekli Havai Nirengi GPS/INS (IMU) destekli hava nirengide izdüşüm merkezi koordinatları (WGS84) ve dönüklükler direk ölçülür. İzdüşüm merkezi koordinatları kinematik GPS ile ölçülür. GPS ile
İstatistik ve Olasılık
 İstatistik ve Olasılık -II Prof. Dr. İrfan KAYMAZ İki Ortalama Farkının Güven Aralığı Anakütle Varyansı Biliniyorsa İki ortalama arasındaki farkın dağılımına ilişkin Z değişkeni: Güven aralığı ifadesinde
İstatistik ve Olasılık -II Prof. Dr. İrfan KAYMAZ İki Ortalama Farkının Güven Aralığı Anakütle Varyansı Biliniyorsa İki ortalama arasındaki farkın dağılımına ilişkin Z değişkeni: Güven aralığı ifadesinde
BÖLÜM 6 MERKEZDEN DAĞILMA ÖLÇÜLERİ
 1 BÖLÜM 6 MERKEZDEN DAĞILMA ÖLÇÜLERİ Gözlenen belli bir özelliği, bu özelliğe ilişkin ölçme sonuçlarını yani verileri kullanarak betimleme, istatistiksel işlemlerin bir boyutunu oluşturmaktadır. Temel
1 BÖLÜM 6 MERKEZDEN DAĞILMA ÖLÇÜLERİ Gözlenen belli bir özelliği, bu özelliğe ilişkin ölçme sonuçlarını yani verileri kullanarak betimleme, istatistiksel işlemlerin bir boyutunu oluşturmaktadır. Temel
ÖRNEKLEME DAĞILIŞLARI VE TAHMİNLEYİCİLERİN ÖZELLİKLERİ
 ÖRNEKLEME DAĞILIŞLARI VE TAHMİNLEYİCİLERİN ÖZELLİKLERİ TEMEL KAVRAMLAR PARAMETRE: Populasyonun sayısal açıklayıcı bir ölçüsüdür ve anakütledeki tüm elemanlar dikkate alınarak hesaplanabilir. Ana kütledeki
ÖRNEKLEME DAĞILIŞLARI VE TAHMİNLEYİCİLERİN ÖZELLİKLERİ TEMEL KAVRAMLAR PARAMETRE: Populasyonun sayısal açıklayıcı bir ölçüsüdür ve anakütledeki tüm elemanlar dikkate alınarak hesaplanabilir. Ana kütledeki
İÇİNDEKİLER ÖN SÖZ...
 İÇİNDEKİLER ÖN SÖZ... v GİRİŞ... 1 1. İSTATİSTİK İN TARİHÇESİ... 1 2. İSTATİSTİK NEDİR?... 3 3. SAYISAL BİLGİDEN ANLAM ÇIKARILMASI... 4 4. BELİRSİZLİĞİN ELE ALINMASI... 4 5. ÖRNEKLEME... 5 6. İLİŞKİLERİN
İÇİNDEKİLER ÖN SÖZ... v GİRİŞ... 1 1. İSTATİSTİK İN TARİHÇESİ... 1 2. İSTATİSTİK NEDİR?... 3 3. SAYISAL BİLGİDEN ANLAM ÇIKARILMASI... 4 4. BELİRSİZLİĞİN ELE ALINMASI... 4 5. ÖRNEKLEME... 5 6. İLİŞKİLERİN
TEMEL İSTATİSTİKİ KAVRAMLAR YRD. DOÇ. DR. İBRAHİM ÇÜTCÜ
 TEMEL İSTATİSTİKİ KAVRAMLAR YRD. DOÇ. DR. İBRAHİM ÇÜTCÜ 1 İstatistik İstatistik, belirsizliğin veya eksik bilginin söz konusu olduğu durumlarda çıkarımlar yapmak ve karar vermek için sayısal verilerin
TEMEL İSTATİSTİKİ KAVRAMLAR YRD. DOÇ. DR. İBRAHİM ÇÜTCÜ 1 İstatistik İstatistik, belirsizliğin veya eksik bilginin söz konusu olduğu durumlarda çıkarımlar yapmak ve karar vermek için sayısal verilerin
Jeodezi
 1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
3 KESİKLİ RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI
 ÖNSÖZ İÇİNDEKİLER III Bölüm 1 İSTATİSTİK ve SAYISAL BİLGİ 11 1.1 İstatistik ve Önemi 12 1.2 İstatistikte Temel Kavramlar 14 1.3 İstatistiğin Amacı 15 1.4 Veri Türleri 15 1.5 Veri Ölçüm Düzeyleri 16 1.6
ÖNSÖZ İÇİNDEKİLER III Bölüm 1 İSTATİSTİK ve SAYISAL BİLGİ 11 1.1 İstatistik ve Önemi 12 1.2 İstatistikte Temel Kavramlar 14 1.3 İstatistiğin Amacı 15 1.4 Veri Türleri 15 1.5 Veri Ölçüm Düzeyleri 16 1.6
ARAZİ ÖLÇMELERİ. Temel Ödev I: Koordinatları belirli iki nokta arasında ki yatay mesafenin
 Temel ödevler Temel ödevler, konum değerlerinin bulunması ve aplikasyon işlemlerine dair matematiksel ve geometrik hesaplamaları içeren yöntemlerdir. öntemlerin isimleri genelde temel ödev olarak isimlendirilir.
Temel ödevler Temel ödevler, konum değerlerinin bulunması ve aplikasyon işlemlerine dair matematiksel ve geometrik hesaplamaları içeren yöntemlerdir. öntemlerin isimleri genelde temel ödev olarak isimlendirilir.
DENEY 0. Bölüm 1 - Ölçme ve Hata Hesabı
 DENEY 0 Bölüm 1 - Ölçme ve Hata Hesabı Amaç: Ölçüm metodu ve cihazına bağlı hata ve belirsizlikleri anlamak, fiziksel bir niceliği ölçüp hata ve belirsizlikleri tespit etmek, nedenlerini açıklamak. Genel
DENEY 0 Bölüm 1 - Ölçme ve Hata Hesabı Amaç: Ölçüm metodu ve cihazına bağlı hata ve belirsizlikleri anlamak, fiziksel bir niceliği ölçüp hata ve belirsizlikleri tespit etmek, nedenlerini açıklamak. Genel
2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI Tanım
 2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI 2.1. Tanım Regresyon analizi, bir değişkenin başka bir veya daha fazla değişkene olan bağımlılığını inceler. Amaç, bağımlı değişkenin kitle ortalamasını, açıklayıcı
2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI 2.1. Tanım Regresyon analizi, bir değişkenin başka bir veya daha fazla değişkene olan bağımlılığını inceler. Amaç, bağımlı değişkenin kitle ortalamasını, açıklayıcı
Ders 4: Rastgele Değişkenler ve Dağılımları
 Ders 4: Rastgele Değişkenler ve Dağılımları Rastgele değişken kavramı Kesikli ve sürekli rastgele değişkenler İki boyutlu rastgele değişkenler Beklenen değer Varyans Örnek uzaydaki her elemanı bir sayıyla
Ders 4: Rastgele Değişkenler ve Dağılımları Rastgele değişken kavramı Kesikli ve sürekli rastgele değişkenler İki boyutlu rastgele değişkenler Beklenen değer Varyans Örnek uzaydaki her elemanı bir sayıyla
 0.04.03 Standart Hata İstatistikte hesaplanan her istatistik değerin mutlaka hatası da hesaplanmalıdır. Çünkü hesaplanan istatistikler, tahmini bir değer olduğu için mutlaka hataları da vardır. Standart
0.04.03 Standart Hata İstatistikte hesaplanan her istatistik değerin mutlaka hatası da hesaplanmalıdır. Çünkü hesaplanan istatistikler, tahmini bir değer olduğu için mutlaka hataları da vardır. Standart
elektromagnetik uzunluk ölçerlerin Iaboratu ar koşullarında kaiibrasyonu
 elektromagnetik uzunluk ölçerlerin Iaboratu ar koşullarında kaiibrasyonu ÖZET Yük. Müh. Uğur DOĞAN -Yük. Müh Özgür GÖR Müh. Aysel ÖZÇEKER Bu çalışmada Yıldız Teknik Üniversitesi İnşaat Fakültesi Jeodezi
elektromagnetik uzunluk ölçerlerin Iaboratu ar koşullarında kaiibrasyonu ÖZET Yük. Müh. Uğur DOĞAN -Yük. Müh Özgür GÖR Müh. Aysel ÖZÇEKER Bu çalışmada Yıldız Teknik Üniversitesi İnşaat Fakültesi Jeodezi
Tanımlayıcı İstatistikler. Yrd. Doç. Dr. Emre ATILGAN
 Tanımlayıcı İstatistikler Yrd. Doç. Dr. Emre ATILGAN 1 Tanımlayıcı İstatistikler Yer Gösteren Ölçüler Yaygınlık Ölçüleri Merkezi Eğilim Ölçüleri Konum Ölçüleri 2 3 Aritmetik Ortalama Aritmetik ortalama,
Tanımlayıcı İstatistikler Yrd. Doç. Dr. Emre ATILGAN 1 Tanımlayıcı İstatistikler Yer Gösteren Ölçüler Yaygınlık Ölçüleri Merkezi Eğilim Ölçüleri Konum Ölçüleri 2 3 Aritmetik Ortalama Aritmetik ortalama,
Appendix B: Olasılık ve Dağılım Teorisi
 Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Notları Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım
Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Notları Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım
İstatistik, genel olarak, rassal bir olayı (ya da deneyi) matematiksel olarak modellemek ve bu model yardımıyla, anakütlenin bilinmeyen karakteristik
 matematiksel olarak modellemek ve bu model yardımıyla, anakütlenin bilinmeyen karakteristik") 6.SUNUM İstatistik, genel olarak, rassal bir olayı (ya da deneyi) matematiksel olarak modellemek ve bu model yardımıyla, anakütlenin bilinmeyen karakteristik özellikleri (ortalama, varyans v.b. gibi) hakkında
6.SUNUM İstatistik, genel olarak, rassal bir olayı (ya da deneyi) matematiksel olarak modellemek ve bu model yardımıyla, anakütlenin bilinmeyen karakteristik özellikleri (ortalama, varyans v.b. gibi) hakkında
Lineer Cebir. Doç. Dr. Niyazi ŞAHİN TOBB. İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler
 Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
Lineer Cebir Doç. Dr. Niyazi ŞAHİN TOBB İçerik: 1.1. Lineer Denklemlerin Tanımı 1.2. Lineer Denklem Sistemleri 1.3. Matrisler Bölüm 1 - Lineer Eşitlikler 1.1. Lineer Eşitliklerin Tanımı x 1, x 2,..., x
YTÜ İktisat Bölümü EKONOMETRİ I Ders Notları
 Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
YTÜ İktisat Bölümü EKONOMETRİ I Ders Notları
 Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
ÖLÇME BİLGİSİ. Sunu 1- Yatay Ölçme. Yrd. Doç. Dr. Muhittin İNAN & Arş. Gör. Hüseyin YURTSEVEN
 ÖÇME BİGİİ unu - atay Ölçme rd. Doç. Dr. Muhittin İNAN & Arş. Gör. Hüseyin URTEVEN COĞRAFİ BİGİ İTEMİNİ OUŞTURABİMEK İÇİN BİGİ TOPAMA ÖNTEMERİ ATA ÖÇMEER (,) ATA AÇIAR VE MEAFEERİN ÖÇÜMEİ ERE ÖÇMEER DÜŞE
ÖÇME BİGİİ unu - atay Ölçme rd. Doç. Dr. Muhittin İNAN & Arş. Gör. Hüseyin URTEVEN COĞRAFİ BİGİ İTEMİNİ OUŞTURABİMEK İÇİN BİGİ TOPAMA ÖNTEMERİ ATA ÖÇMEER (,) ATA AÇIAR VE MEAFEERİN ÖÇÜMEİ ERE ÖÇMEER DÜŞE
Uzay Geriden Kestirme
 Uzay Geriden Kestirme (Eğik Uzunluklarla veya Düşey Açılarla Üçboyutlu Konum Belirleme ) Sebahattin BEKTAŞ* GİRİŞ Konum belirleme problemi günümüzde de jeodezinin en önemli problemi olmaya devam etmektedir.
Uzay Geriden Kestirme (Eğik Uzunluklarla veya Düşey Açılarla Üçboyutlu Konum Belirleme ) Sebahattin BEKTAŞ* GİRİŞ Konum belirleme problemi günümüzde de jeodezinin en önemli problemi olmaya devam etmektedir.
11. SINIF. No Konular Kazanım Sayısı GEOMETRİ TRİGONOMETRİ Yönlü Açılar Trigonometrik Fonksiyonlar
 11. SINIF No Konular Kazanım Sayısı GEOMETRİ Ders Saati Ağırlık (%) 11.1. TRİGONOMETRİ 7 56 26 11.1.1. Yönlü Açılar 2 10 5 11.1.2. Trigonometrik Fonksiyonlar 5 46 21 11.2. ANALİTİK GEOMETRİ 4 24 11 11.2.1.
11. SINIF No Konular Kazanım Sayısı GEOMETRİ Ders Saati Ağırlık (%) 11.1. TRİGONOMETRİ 7 56 26 11.1.1. Yönlü Açılar 2 10 5 11.1.2. Trigonometrik Fonksiyonlar 5 46 21 11.2. ANALİTİK GEOMETRİ 4 24 11 11.2.1.
İÇİNDEKİLER. Ön Söz Saymanın Temel Kuralları Permütasyon (Sıralama) Kombinasyon (Gruplama) Binom Açılımı...
 Kombinasyon (Gruplama) Binom Açılımı...") İÇİNDEKİLER Ön Söz... Saymanın Temel Kuralları... Permütasyon (Sıralama)... 8 Kombinasyon (Gruplama)... 6 Binom Açılımı... Olasılık... 9 İstatistik... 8... Dağılımlar... 5 Genel Tarama Sınavı... 6 RASTGELE
İÇİNDEKİLER Ön Söz... Saymanın Temel Kuralları... Permütasyon (Sıralama)... 8 Kombinasyon (Gruplama)... 6 Binom Açılımı... Olasılık... 9 İstatistik... 8... Dağılımlar... 5 Genel Tarama Sınavı... 6 RASTGELE
İSTATİSTİK VE OLASILIK SORULARI
 İSTATİSTİK VE OLASILIK SORULARI SORU 1 Meryem, 7 arkadaşı ile bir voleybol maçına katılmayı planlamaktadır. Davet ettiği arkadaşlarından herhangi bir tanesinin EVET deme olasılığı 0,8 ise, en az 3 arkadaşının
İSTATİSTİK VE OLASILIK SORULARI SORU 1 Meryem, 7 arkadaşı ile bir voleybol maçına katılmayı planlamaktadır. Davet ettiği arkadaşlarından herhangi bir tanesinin EVET deme olasılığı 0,8 ise, en az 3 arkadaşının
KARŞILAŞTIRMA İSTATİSTİĞİ, ANALİTİK YÖNTEMLERİN KARŞILAŞTIRILMASI, BİYOLOJİK DEĞİŞKENLİK. Doç.Dr. Mustafa ALTINIŞIK ADÜTF Biyokimya AD 2005
 KARŞILAŞTIRMA İSTATİSTİĞİ, ANALİTİK YÖNTEMLERİN KARŞILAŞTIRILMASI, BİYOLOJİK DEĞİŞKENLİK Doç.Dr. Mustafa ALTINIŞIK ADÜTF Biyokimya AD 2005 1 Karşılaştırma istatistiği Temel kavramlar: Örneklem ve evren:
KARŞILAŞTIRMA İSTATİSTİĞİ, ANALİTİK YÖNTEMLERİN KARŞILAŞTIRILMASI, BİYOLOJİK DEĞİŞKENLİK Doç.Dr. Mustafa ALTINIŞIK ADÜTF Biyokimya AD 2005 1 Karşılaştırma istatistiği Temel kavramlar: Örneklem ve evren:
Mustafa Sezer PEHLİVAN. Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü
 * Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü SAYILAR Doğal Sayılar, Tam Sayılar, Rasyonel Sayılar, N={0,1,2,3,,n, } Z={,-3,-2,-1,0,1,2,3, } Q={p/q: p,q Z ve q 0} İrrasyonel Sayılar, I= {p/q
* Yüksek İhtisas Üniversitesi Beslenme ve Diyetetik Bölümü SAYILAR Doğal Sayılar, Tam Sayılar, Rasyonel Sayılar, N={0,1,2,3,,n, } Z={,-3,-2,-1,0,1,2,3, } Q={p/q: p,q Z ve q 0} İrrasyonel Sayılar, I= {p/q
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ. Prof. Dr. Mualla YALÇINKAYA
 JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ Prof. Dr. Mualla YALÇINKAYA Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2018 VERİLERİN İRDELENMESİ Örnek: İki nokta arasındaki uzunluk 80 kere
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ Prof. Dr. Mualla YALÇINKAYA Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2018 VERİLERİN İRDELENMESİ Örnek: İki nokta arasındaki uzunluk 80 kere
28/04/2014 tarihli LYS-1 Matematik-Geometri Testi konu analizi SORU NO LYS 1 MATEMATİK TESTİ KAZANIM NO KAZANIMLAR 1 / 31
 SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 11 32159 Rasyonel sayı kavramını açıklar. 2 12 32151 İki ya da daha çok doğal sayının en büyük ortak bölenini ve en küçük ortak katını bulur.
SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 11 32159 Rasyonel sayı kavramını açıklar. 2 12 32151 İki ya da daha çok doğal sayının en büyük ortak bölenini ve en küçük ortak katını bulur.
YERSEL YÖNTEMLERLE ÖLÇÜLEN JEODEZİK AĞLARIN ÜÇ BOYUTLU DENGELENMESİ
 23 YERSEL YÖNTEMLERLE ÖLÇÜLEN JEODEZİK AĞLARIN ÜÇ BOYUTLU DENGELENMESİ Veysel ATASOY İ, GİRİŞ Jeodezinin günümüzdeki tanımı, üç boyutlu ve zaman değişkenli bir uzayda yerin çekim alanını da kapsamak koşuluyla
23 YERSEL YÖNTEMLERLE ÖLÇÜLEN JEODEZİK AĞLARIN ÜÇ BOYUTLU DENGELENMESİ Veysel ATASOY İ, GİRİŞ Jeodezinin günümüzdeki tanımı, üç boyutlu ve zaman değişkenli bir uzayda yerin çekim alanını da kapsamak koşuluyla
rasgele değişkeninin olasılık yoğunluk fonksiyonu,
 3.6. Bazı Sürekli Dağılımlar 3.6.1 Normal Dağılım Normal dağılım hem uygulamalı hem de teorik istatistikte kullanılan oldukça önemli bir dağılımdır. Normal dağılımın istatistikte önemli bir yerinin olmasının
3.6. Bazı Sürekli Dağılımlar 3.6.1 Normal Dağılım Normal dağılım hem uygulamalı hem de teorik istatistikte kullanılan oldukça önemli bir dağılımdır. Normal dağılımın istatistikte önemli bir yerinin olmasının
1.58 arasındaki her bir değeri alabileceği için sürekli bir
 7.SUNUM Hatırlanacağı gibi, kesikli rassal değişkenler sonlu (örneğin; 0, 1, 2,...,10) veya sayılabilir sonsuzlukta (örneğin; 0, 1, 2,...) değerler alabilmektedir. Fakat birçok uygulamada, rassal değişkenin
7.SUNUM Hatırlanacağı gibi, kesikli rassal değişkenler sonlu (örneğin; 0, 1, 2,...,10) veya sayılabilir sonsuzlukta (örneğin; 0, 1, 2,...) değerler alabilmektedir. Fakat birçok uygulamada, rassal değişkenin
Örnek. Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız.
 Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
Örnek Aşağıdaki veri setlerindeki X ve Y veri çiftlerini kullanarak herbir durumda X=1,5 için Y nin hangi değerleri alacağını hesaplayınız. i. ii. X 1 2 3 4 1 2 3 4 Y 2 3 4 5 4 3 2 1 Örnek Aşağıdaki veri
Tesadüfi Değişken. w ( )
") 1 Tesadüfi Değişken Tesadüfi değişkenler gibi büyük harflerle veya gibi yunan harfleri ile bunların aldığı değerler de gibi küçük harflerle gösterilir. Tesadüfi değişkenler kesikli veya sürekli olmak üzere
1 Tesadüfi Değişken Tesadüfi değişkenler gibi büyük harflerle veya gibi yunan harfleri ile bunların aldığı değerler de gibi küçük harflerle gösterilir. Tesadüfi değişkenler kesikli veya sürekli olmak üzere
Ölçü Hataları Hatasız ölçü olmaz
 Ölçü Hataları Yeryüzünde ister bir kenar, ister bir açı birkaç kez ölçüldüğünde her ölçü değeri arasında az çok farkların olduğu görülür. Aynı büyüklüğe ait yapılan her geometrik veya fiziksel ölçünün
Ölçü Hataları Yeryüzünde ister bir kenar, ister bir açı birkaç kez ölçüldüğünde her ölçü değeri arasında az çok farkların olduğu görülür. Aynı büyüklüğe ait yapılan her geometrik veya fiziksel ölçünün
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
SÜREKLİ OLASILIK DAĞILIŞLARI
 SÜREKLİ OLASILIK DAĞILIŞLARI Sürekli verilerin göstermiş olduğu dağılışa sürekli olasılık dağılışı denir. Sürekli olasılık dağılışlarının fonksiyonlarına yoğunluk fonksiyonu denilmekte ve bu dağılışlarla
SÜREKLİ OLASILIK DAĞILIŞLARI Sürekli verilerin göstermiş olduğu dağılışa sürekli olasılık dağılışı denir. Sürekli olasılık dağılışlarının fonksiyonlarına yoğunluk fonksiyonu denilmekte ve bu dağılışlarla
Rastgele Değişkenlerin Dağılımları. Mühendislikte İstatistik Yöntemler
 Rastgele Değişkenlerin Dağılımları Mühendislikte İstatistik Yöntemler Ayrık Rastgele Değişkenler ve Olasılık Dağılımları Yapılan çalışmalarda elde edilen verilerin dağılışı ve dağılış fonksiyonu her seferinde
Rastgele Değişkenlerin Dağılımları Mühendislikte İstatistik Yöntemler Ayrık Rastgele Değişkenler ve Olasılık Dağılımları Yapılan çalışmalarda elde edilen verilerin dağılışı ve dağılış fonksiyonu her seferinde
BKİ farkı Standart Sapması (kg/m 2 ) A B BKİ farkı Ortalaması (kg/m 2 )
 A B BKİ farkı Ortalaması (kg/m 2 )") 4. SUNUM 1 Gözlem ya da deneme sonucu elde edilmiş sonuçların, rastlantıya bağlı olup olmadığının incelenmesinde kullanılan istatistiksel yöntemlere HİPOTEZ TESTLERİ denir. Sonuçların rastlantıya bağlı
4. SUNUM 1 Gözlem ya da deneme sonucu elde edilmiş sonuçların, rastlantıya bağlı olup olmadığının incelenmesinde kullanılan istatistiksel yöntemlere HİPOTEZ TESTLERİ denir. Sonuçların rastlantıya bağlı
TOPOĞRAFYA Temel Ödevler / Poligonasyon
 TOPOĞRAFYA Temel Ödevler / Poligonasyon Yrd. Doç. Dr. Aycan M. MARANGOZ ÇEVRE MÜHENDİSLİĞİ BÖLÜMÜ JDF 264/270 TOPOĞRAFYA DERSİ NOTLARI http://geomatik.beun.edu.tr/marangoz http://jeodezi.karaelmas.edu.tr/linkler/akademik/marangoz/marangoz.htm
TOPOĞRAFYA Temel Ödevler / Poligonasyon Yrd. Doç. Dr. Aycan M. MARANGOZ ÇEVRE MÜHENDİSLİĞİ BÖLÜMÜ JDF 264/270 TOPOĞRAFYA DERSİ NOTLARI http://geomatik.beun.edu.tr/marangoz http://jeodezi.karaelmas.edu.tr/linkler/akademik/marangoz/marangoz.htm
OLASILIK ve KURAMSAL DAĞILIMLAR
 OLASILIK ve KURAMSAL DAĞILIMLAR Kuramsal Dağılımlar İstatistiksel çözümlemelerde; değişkenlerimizin dağılma özellikleri, çözümleme yönteminin seçimi ve sonuçlarının yorumlanmasında önemlidir. Dağılma özelliklerine
OLASILIK ve KURAMSAL DAĞILIMLAR Kuramsal Dağılımlar İstatistiksel çözümlemelerde; değişkenlerimizin dağılma özellikleri, çözümleme yönteminin seçimi ve sonuçlarının yorumlanmasında önemlidir. Dağılma özelliklerine
Mühendislikte İstatistik Yöntemler
 .0.0 Mühendislikte İstatistik Yöntemler İstatistik Parametreler Tarih Qma.3.98 4..98 0.3.983 45 7..984 37.3.985 48 0.4.986 67.4.987 5 0.3.988 45.5.989 34.3.990 59.4.99 3 4 34 5 37 6 45 7 45 8 48 9 5 0
.0.0 Mühendislikte İstatistik Yöntemler İstatistik Parametreler Tarih Qma.3.98 4..98 0.3.983 45 7..984 37.3.985 48 0.4.986 67.4.987 5 0.3.988 45.5.989 34.3.990 59.4.99 3 4 34 5 37 6 45 7 45 8 48 9 5 0
VERİ KÜMELERİNİ BETİMLEME
 BETİMLEYİCİ İSTATİSTİK VERİ KÜMELERİNİ BETİMLEME Bir amaç için derlenen verilerin tamamının olduğu, veri kümesindeki birimlerin sayısal değerlerinden faydalanarak açık ve net bir şekilde ilgilenilen özellik
BETİMLEYİCİ İSTATİSTİK VERİ KÜMELERİNİ BETİMLEME Bir amaç için derlenen verilerin tamamının olduğu, veri kümesindeki birimlerin sayısal değerlerinden faydalanarak açık ve net bir şekilde ilgilenilen özellik
SONLU FARKLAR GENEL DENKLEMLER
 SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ders 9: Kitle Ortalaması ve Varyansı için Tahmin
 Ders 9: Kitle Ortalaması ve Varyansı için Tahmin Kitle ve Örneklem Örneklem Dağılımı Nokta Tahmini Tahmin Edicilerin Özellikleri Kitle ortalaması için Aralık Tahmini Kitle Standart Sapması için Aralık
Ders 9: Kitle Ortalaması ve Varyansı için Tahmin Kitle ve Örneklem Örneklem Dağılımı Nokta Tahmini Tahmin Edicilerin Özellikleri Kitle ortalaması için Aralık Tahmini Kitle Standart Sapması için Aralık
MÜHENDİSLİK ÖLÇMELERİ UYGULAMASI (HRT4362) 8. Yarıyıl
 8. Yarıyıl") İnşaat Fakültesi Harita Mühendisliği Bölümü Ölçme Tekniği Anabilim alı MÜHENİSLİK ÖLÇMELERİ UYGULAMASI (HRT436) 8. Yarıyıl U L K Kredi 3 ECTS 3 UYGULAMA-5 ELEKTRONİK ALETLERİN KALİBRASYONU Prof.r.Engin
İnşaat Fakültesi Harita Mühendisliği Bölümü Ölçme Tekniği Anabilim alı MÜHENİSLİK ÖLÇMELERİ UYGULAMASI (HRT436) 8. Yarıyıl U L K Kredi 3 ECTS 3 UYGULAMA-5 ELEKTRONİK ALETLERİN KALİBRASYONU Prof.r.Engin
Örnek...3 : Aşağıdaki ifadelerden hangileri bir dizinin genel terim i olabilir? Örnek...4 : Genel terimi w n. Örnek...1 : Örnek...5 : Genel terimi r n
 DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler değer kümelerine göre adlandırılırlar. Dizinin değer kümesi
DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler değer kümelerine göre adlandırılırlar. Dizinin değer kümesi
Bekleme Hattı Teorisi
 Bekleme Hattı Teorisi Sürekli Parametreli Markov Zincirleri Tanım 1. * +, durum uzayı * +olan sürekli parametreli bir süreç olsun. Aşağıdaki özellik geçerli olduğunda bu sürece sürekli parametreli Markov
Bekleme Hattı Teorisi Sürekli Parametreli Markov Zincirleri Tanım 1. * +, durum uzayı * +olan sürekli parametreli bir süreç olsun. Aşağıdaki özellik geçerli olduğunda bu sürece sürekli parametreli Markov
Genel Olarak Bir Yüzeyin Diğer Bir Yüzeye Projeksiyonu
 JEODEZİ9 1 Genel Olarak Bir Yüzeyin Diğer Bir Yüzeye Projeksiyonu u ve v Gauss parametrelerine bağlı olarak r r ( u, v) yer vektörü ile verilmiş bir Ω yüzeyinin, u*, v* Gauss parametreleri ile verilmiş
JEODEZİ9 1 Genel Olarak Bir Yüzeyin Diğer Bir Yüzeye Projeksiyonu u ve v Gauss parametrelerine bağlı olarak r r ( u, v) yer vektörü ile verilmiş bir Ω yüzeyinin, u*, v* Gauss parametreleri ile verilmiş
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü
 Mühendislikte İstatistiksel Yöntemler Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Araştırma sonuçlarının açıklanmasında frekans tablosu
Mühendislikte İstatistiksel Yöntemler Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Araştırma sonuçlarının açıklanmasında frekans tablosu
BİYOİSTATİSTİK Olasılıkta Temel Kavramlar Yrd. Doç. Dr. Aslı SUNER KARAKÜLAH
 BİYOİSTTİSTİK Olasılıkta Temel Kavramlar Yrd. Doç. Dr. slı SUNER KRKÜLH Ege Üniversitesi, Tıp Fakültesi, Biyoistatistik ve Tıbbi Bilişim D. Web: www.biyoistatistik.med.ege.edu.tr 1 OLSILIK Olasılık; Tablo
BİYOİSTTİSTİK Olasılıkta Temel Kavramlar Yrd. Doç. Dr. slı SUNER KRKÜLH Ege Üniversitesi, Tıp Fakültesi, Biyoistatistik ve Tıbbi Bilişim D. Web: www.biyoistatistik.med.ege.edu.tr 1 OLSILIK Olasılık; Tablo
(m+2) +5<0. 7/m+3 + EŞİTSİZLİKLER A. TANIM
 +5<0. 7/m+3 + EŞİTSİZLİKLER A. TANIM") EŞİTSİZLİKLER A. TANIM f(x)>0, f(x) - eşitsizliğinin
EŞİTSİZLİKLER A. TANIM f(x)>0, f(x) - eşitsizliğinin
EĞİTİM-ÖĞRETİM YILI 8. SINIF MATEMATİK DERSİ KAZANIMLARININ ÇALIŞMA TAKVİMİNE GÖRE DAĞILIM ÇİZELGESİ SÜRE
 Ay 2016 2017 EĞİTİM-ÖĞRETİM YILI 8. SINIF MATEMATİK DERSİ KAZANIMLARININ ÇALIŞMA TAKVİMİNE GÖRE DAĞILIM ÇİZELGESİ SÜRE Hafta ÖĞRENME ALANI ALT ÖĞRENME ALANI KAZANIMLAR EYLÜL 3 4 Sayılar ve İşlemler Çarpanlar
Ay 2016 2017 EĞİTİM-ÖĞRETİM YILI 8. SINIF MATEMATİK DERSİ KAZANIMLARININ ÇALIŞMA TAKVİMİNE GÖRE DAĞILIM ÇİZELGESİ SÜRE Hafta ÖĞRENME ALANI ALT ÖĞRENME ALANI KAZANIMLAR EYLÜL 3 4 Sayılar ve İşlemler Çarpanlar
İstatistik ve Olasılık
 İstatistik ve Olasılık - I Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kes1rim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmak7r. ü Bu anlamda, anakütleden çekilen
İstatistik ve Olasılık - I Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kes1rim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmak7r. ü Bu anlamda, anakütleden çekilen
olmak üzere 4 ayrı kütükte toplanan günlük GPS ölçüleri, baz vektörlerinin hesabı için bilgisayara aktarılmıştır (Ersoy.97).
.") 1-) GPS Ölçülerinin Yapılması Ölçülerin yapılacağı tarihlerde kısa bir süre gözlem yapılarak uydu efemerisi güncelleştirilmiştir. Bunun sonunda ölçü yapılacak bölgenin yaklaşık koordinatlarına göre, bir
1-) GPS Ölçülerinin Yapılması Ölçülerin yapılacağı tarihlerde kısa bir süre gözlem yapılarak uydu efemerisi güncelleştirilmiştir. Bunun sonunda ölçü yapılacak bölgenin yaklaşık koordinatlarına göre, bir
Korelasyon, Korelasyon Türleri ve Regresyon
 Korelasyon, Korelasyon Türleri ve Regresyon İçerik Korelasyon Korelasyon Türleri Korelasyon Katsayısı Regresyon KORELASYON Korelasyon iki ya da daha fazla değişken arasındaki doğrusal ilişkiyi gösterir.
Korelasyon, Korelasyon Türleri ve Regresyon İçerik Korelasyon Korelasyon Türleri Korelasyon Katsayısı Regresyon KORELASYON Korelasyon iki ya da daha fazla değişken arasındaki doğrusal ilişkiyi gösterir.
PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ KAZANIM NO KAZANIMLAR
 2013-2014 PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 12 32173 Üslü İfadeler 2 13 42016 Rasyonel ifade kavramını örneklerle açıklar ve
2013-2014 PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 12 32173 Üslü İfadeler 2 13 42016 Rasyonel ifade kavramını örneklerle açıklar ve
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
m=n şeklindeki matrislere kare matris adı verilir. şeklindeki matrislere ise sütun matrisi denir. şeklindeki A matrisi bir kare matristir.
 Matrisler Satır ve sütunlar halinde düzenlenmiş tabloya matris denir. m satırı, n ise sütunu gösterir. a!! a!" a!! a!" a!! a!! a!! a!! a!" m=n şeklindeki matrislere kare matris adı verilir. [2 3 1] şeklinde,
Matrisler Satır ve sütunlar halinde düzenlenmiş tabloya matris denir. m satırı, n ise sütunu gösterir. a!! a!" a!! a!" a!! a!! a!! a!! a!" m=n şeklindeki matrislere kare matris adı verilir. [2 3 1] şeklinde,
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İzdüşüm merkezi(o):
Elipsoid Üçgenlerinin Hesaplanması Yedek Hesap Yüzeyi olarak Küre
 Jeodezi 7 1 Elipsoid Üçgenlerinin Hesaplanması Yedek Hesap Yüzeyi olarak Küre Elipsoid yüzeyinin küçük parçalarında oluşan küçük üçgenlerin (kenarları 50-60 km den küçük) hesaplanmasında klasik jeodezide
Jeodezi 7 1 Elipsoid Üçgenlerinin Hesaplanması Yedek Hesap Yüzeyi olarak Küre Elipsoid yüzeyinin küçük parçalarında oluşan küçük üçgenlerin (kenarları 50-60 km den küçük) hesaplanmasında klasik jeodezide