SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ
|
|
|
- Aylin Yetiş
- 5 yıl önce
- İzleme sayısı:
Transkript
1 SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin temel avantajı, sayısal kontrol sistemlerinin tasarımında, analog kontrol sistemlerinde kullanılan yöntemlerin (ya da oldukça benzerlerinin) kullanımına olanak sağlamasıdır. Analiz ve tasarım yöntemleri tanıtılırken, sistemdeki örnekleme periyodunun sabit olduğu, yani bütün bir operasyon boyunca tüm örnekleyicilerin aynı frekansa sahip ve senkron olduğu varsayılacaktır. Dersin başlıca konuları: İmpals (Darbecik) Örnekleme ve Veri Tutma z-dönüşümünün Konvolüsyon İntegrali Yöntemi ile Elde Edilmesi Örneklenmiş Sinyalden Gerçek Sinyalin Yeniden Elde Edilmesi Pals (Darbe) Transfer Fonksiyonu Sayısal Kontrolörlerin ve Sayısal Filtrelerin Gerçeklenmesi
2 İmpals (Darbecik) Örnekleme ve Veri Tutma İlk derste söylendiği gibi, ayrık-zamanlı kontrol sistemleri hem ayrık-zamanlı hem de süreklizamanlı bileşenler içerir. Bu nedenle de sistemde bazı sinyaller sayısal (dijital) bazıları analogtur. Dolayısıyla bir sayısal kontrol sistemi, en az birer adet örnekleyici ve tutucu içerir. Bu alt bölümde örnekleme ve tutma işlemine ilişkin detaylar sunulacaktır. İmpals Örnekleme: İmpals (Darbecik) Örnekliyici ideal bir örnekleyicidir. Bu örnekleyicinin çıkışı, aşağıdaki şekilde görüldüğü gibi t=0 anından başlayan ve T örnekleme periyoduna sahip impals dizisi şeklindedir. Her bir impalsın genliği, örneklenen sürekli-zaman sinyalin o andaki değerine eşittir. Yani t kt anındaki impalsın ifadesi x( kt ) ( t kt ) şeklindedir. Örneklenmiş sinyal için genellikle x () t notasyonu kullanılır. Dolayısıyla örneklenmiş sinyal, matematiksel olarak bir impals dizisi şeklinde aşağıdaki gibi ifade edilebilir: ya da açık ifadesiyle x ( t) x( kt ) ( t kt ) k0 x ( t) x(0) ( t) x( T) ( t T) x(2 T) ( t 2 T) x( kt ) ( t kt ) Buradaki impals sinyallerinin dizisi özel olarak () t ile gösterilir ve T T k0 ( t kt ) şeklinde ifade edilir. 2
3 Örnekleyicinin çıkışı, bir sürekli sinyal olan xt () ile impalslerin dizisi olan () t nin çarpımına T eşittir. Dolayısıyla örnekleyici, aşağıdaki şekilde görüldüğü gibi modülasyon sinyali xt () ve taşıyıcı sinyali () t olan bir modülator gibi düşünülebilir. T İmpals örnekleyicinin çıkışının açık ifadesi olarak yukarıda yazdığımız x ( t) x(0) ( t) x( T) ( t T) x(2 T) ( t 2 T) x( kt ) ( t kt ) denkleminin her iki tarafının Laplace Dönüşümü alınırsa k0 X ( s) x ( t) x(0) ( t) x( T) ( t T) x(2 T) ( t 2 T) x( kt) ( t kt) x( kt ) e kts Şimdi aşağıdaki gibi bir tanımlama yapalım: z e Ts ve dolayısıyla s ln z T 3
4 denklemi, az önce yukarıda elde ettiğimiz denkleminde yerine yazılırsa, X ( s) x( kt ) e k0 s ln z T k0 4 kts X ( s ) x ( kt ) z elde edilir. Dikkat edilirse bu denklemin sağ tarafı, z-dönüşümünün matematiksel tanımını veren seridir. Sonuç olarak, X s X z X z x kt z k ( ) ln ( ) ( ) s ln z T T k0 Veri Tutma konusuna geçmeden önce, impals örnekleme ile ilgili olarak elde ettiğimiz sonuçları özetleyelim: Zaman domenindeki bir xt () sinyalinin, sabit T örnekleme periyodu ile her bir bileşeni x( kt ) ( t kt ) şeklinde ifade edilen impalslerin dizisi şeklinde örneklenmesine İmpals Örnekleme denir. Böyle bir örnekleyici tamamen ideal bir örnekleyicidir, tamamen matematiksel analiz amacıyla tanılanmıştır, gerçel dünyada böyle bir örnekleyici fiziksel olarak mevcut değildir. İmpals örnekleyici ile örneklenmiş sinyalin genel ifadesi şeklindedir. x ( t) x( kt ) ( t kt ) k0 Zaman domenindeki bir xt () fonksiyonunun z-dönüşümü olan X() z ile, bu fonksiyonun impals örneklenmiş formunun Laplace Dönüşümü olan X () s arasında, X ln z X ( z) T ilişkisi mevcuttur. Olası bir yanlış anlamanın engellenmesi adına şu vurgulanmalıdır ki bu bağıntı, xt () nin Laplace Dönüşümü olan X() s ile xt () nin z-dönüşümü olan X() z arasında bir bağıntı değildir. Bu bağıntı, xt () nin impals örneklenmiş formunun Laplace Dönüşümü olan X () s nin z-dönüşümü olan X() z arasında bir bağıntıdır. k ile xt ()



5 Veri Tutma Devreleri: Veri Tutma, bir ayrık-zaman sinyali olan x( kt ) den, bir sürekli zaman sinyali olan ht () yi üretme işlemidir. Yani bir tutma devresi, örneklenmiş sinyali bir sürekli zaman sinyaline dönüştüren devredir. En basit, gerçeklenmesi en kolay ve en ucuz tutma devresi Sıfırıncı Mertebeden Tutucu Zero Order Hold devresidir. Sıfırıncı Mertebeden Tutucu: Bir sıfırıncı mertebeden tutucu, sinyalin bir örnekleme anındaki genlik değerini bir sonraki örnekleme anına kadar tutar. Sıfırıncı mertebeden tutucunun çıkışı, bir merdiven sinyali şeklinde olduğu için, bu tür tutma devreleri genellikle merdiven basamağı üreteci olarak da adlandırılır. Tutucunun fonksiyonunu görselleştirmek amacıyla, aşağıdaki şekilde bir örnekleyici ve bir tutucu beraber gösterilmiştir. Şekilde görüldüğü gibi tutucu, örneklenmiş sinyal x( kt ) nin her bir örnekleme anındaki genliğini, bir sonraki örnekleme anına kadar tutmaktadır. Bu işlem, matematiksel olarak şeklinde ifade edilebilir. h( kt t) x( kt), 0 t T Tutucu devre, sayısal kontrol sisteminin bir parçası olduğu için, bu devrenin transfer fonksiyonu elde edilmelidir ki sistemin analizi ve tasarımı yapılabilsin. Aşağıda Şekil (a) da gerçek bir örnekleyici ve tutucunun şeması görülmektedir. Eğer sürekli zaman sinyali xt () nin, gerçekte var olmayan bir impals örnekleyici örneklendiği kabul edilirse, Şekil (b) de görülen şema elde edilir. Sürekli-zaman sinyalinin bir impals örnekleyici ile örneklendiğinin kabul edilmesinin nedeni, bu örnekleyici ve tutucu kombinasyonunun z-düzleminde analizinin yapılabilmesini sağlamaktır. 5
 da görülen gerçek örnekleyici ve tutucu, matematiksel olarak analizinin yapılabilmesi için Şekil (b) de görülen (ve gerçekte var olmayan) impals örnekleyici ve tutucu")
6 Türetilmesine ilişkin detaylar sunulmaksızın, bir sıfırıncı mertebeden tutucunun s-domenindeki transfer fonksiyonu, G h0 e () s s olarak elde edilir. Yani özetle, yukarıda Şekil (a) da görülen gerçek örnekleyici ve tutucu, matematiksel olarak analizinin yapılabilmesi için Şekil (b) de görülen (ve gerçekte var olmayan) impals örnekleyici ve tutucu ile temsil edilebilir. Bu durumda örnekleyici ve tutucunun transfer fonksiyonu yukarıdaki denklemde görüldüğü gibi olacaktır. Gerçek bir örnekleyici ile impals örnekleyicinin şemalarda ayırt edilebilmesi için, impals örnekleyici sembolünde yukarıdaki şekilde görüldüğü gibi fazladan bir ok vardır. Birinci Mertebeden Tutucu: Birinci Mertebeden Tutucu (First-Order Hold), her bir örnekleme anında, önceki iki örneğin ekstrapolasyonunu çıkış olarak verir ve bu değeri bir sonraki örnekleme anına kadar tutar. Sayısal kontrol sistemlerinde birinci mertebeden tutucu pek kullanılmaz. Genellikle sıfırıncı mertebeden tutucu pratik uygulamalarda daha çok kullanılır. Aşağıda birinci mertebeden tutucunun tipik bir şeması görülmektedir. Ts Bu tür tutucunun transfer fonksiyonunu türetmek için sisteme basit bir giriş sinyali uygulanır. Örneğin aşağıda xt () giriş sinyali için bir adım girişi kullanılmıştır. Şekil (a) da gerçek bir örnekleyicinin ve ardına bağlanmış bir birinci mertebeden tutucunun şeması, Şekil (b) de ise bu yapının matematiksel olarak analiz edilebilmesine olanak sağlayan, impals örnekleyici kullanılan eşdeğer modeli görülmektedir. 6

7 Birinci mertebeden tutucunun transfer fonksiyonu ise şu şekilde elde edilir: G h Ts e Ts () s s T Örnekleme ve tutma devrelerine ilişkin bahsettiklerimizi özetlersek: Gerçek bir örnekleyici, giriş sinyalini periyodik olarak örnekler ve çıkışında bir pals dizisi üretir. Eğer örnekleme süresi çok küçükse ya da (pratikte asla sıfır olamaz ancak) sıfır kabul edilirse, genliği sürekli-zaman sinyalinin örnekleme anındaki genliğine eşit impals dizisi elde edilir ve böylece örnekleyici z-domeninde analiz edilebilir. Gerçek bir örnekleyici ve sıfırıncı mertebeden tutucu, yukarıda anlatılan yaklaşım Ts kullanılarak, matematiksel olarak e / s denklemiyle modellenebilir ve böylece örnekleyici ve tutucu içeren kontrol sistemlerinin analizi ve tasarımında bu model kullanılabilir. 2 7
8 İmpals (Darbecik) Örnekleme ve Veri Tutma z-dönüşümünün Konvolüsyon İntegrali Yöntemi ile Elde Edilmesi Örneklenmiş Sinyalden Gerçek Sinyalin Yeniden Elde Edilmesi Pals (Darbe) Transfer Fonksiyonu Sayısal Kontrolörlerin ve Sayısal Filtrelerin Gerçeklenmesi z-dönüşümünün Konvolüsyon İntegrali Yöntemi ile Elde Edilmesi Zaman domenindeki bir xt () sinyalinin Laplace Dönüşümü, konvolüsyon integrali kullanılarak da hesaplanabilir. Aşağıdaki impals örnekleyiciyi göz önünde bulunduralım: Bu impals örnekleyicinin çıkışı, x ( t) x( T) t kt x( t) t kt k0 k0 şeklindedir. İmpals fonksiyonunun Laplace Dönüşümünün şeklinde olduğu bilindiğine göre; k0 ( t kt ) e kts ( t kt ) e e e Ts 2Ts 3Ts olur. Örneklenmiş sinyal x () t nin Laplace Dönüşümü, X ( s) x ( t) x( t) t kt k0 e Ts 8
9 olduğuna göre; X () s k0 zamana bağlı iki fonksiyonun çarpımının Laplace dönüşümüdür: xt () ve ( t kt ). (Bu çarpımın Laplace dönüşümünün, fonksiyonların her birinin ayrı ayrı Laplace dönüşümlerinin çarpımına eşit olmadığına dikkat ediniz). Laplace dönüşümü alınabilir olan f() t ve gt () şeklinde iki fonksiyonun çarpımının Laplace dönüşümü, konvolüsyon integrali yoluyla şu şekilde hesaplanır: st f ( t) g( t) f ( t) g( t) e dt 0 2 j cj cj 9 F( p) G( s p) dp Bu denklemde p integral değişkenidir. Bu denklemde f() t ve gt () yerine sırasıyla xt () ve ( t kt ) yazılırsa, bu durumda x () t nin Laplace dönüşümü, yani k0 X ( s) x ( t) x( t) t kt k0 konvolüsyon integrali yoluyla şu şekilde bulunur: X ( s) x ( t) x( t) t kt k0 cj X ( p) 2 j e cj T ( sp) Bu integral, konvolüsyon integrali olarak adlandırılır. Ters z-dönüşümü konusundan hatırlayacağımız üzere, bu integrali hesaplamanın pratik yolu, ilgili ifadenin rezidülerini bulmaktır. X ( s) X ( p) 'nin p p kutbundaki rezidüleri T ( sp) i e şeklinde hesaplanır (bu formül, X() s in tüm kutuplarının sol yarı düzlemde olması durumunda Ts geçerlidir). Bu formülde, önce z e dönüşümü yapılıp, sonra da integral değişkeni p nin yerine esas değişken s yazılırsa, X() z aşağıdaki şekilde bulunur: z X ( z) X ( s) 'nin s si kutbundaki rezidüleri Ts z e dp
10 Ör: Aşağıda verilen X() s fonksiyonunun z-dönüşümü olan X() z yi, Konvolüsyon İntegrali Yöntemi ile bulunuz. C: Verilen X() s fonksiyonu, s 0 noktasında katlı kutba ve s noktasında bir kutba sahiptir. Bu durumda X() z aşağıdaki gibi bulunur. z X ( z) X ( s) 'nin s si kutbundaki rezidüleri Ts z e d 2 z z lim s lim ( s) 0 2 Ts 2 Ts (2 )! s ds s ( s ) z e s s ( s ) z e z z e ( s )( T ) e z ( s ) z e e Ts Ts lim s0 2 Ts 2 2 ( ) z z( z T ) z 2 ( z) z e T 2 T T T z T e z e Te 2 T ( z ) z e T T T 2 T z e z T e z e Te z 2 T Ts e / s Terimi İçeren Fonksiyonların z-dönüşümünün Bulunması: Eğer s-domenindeki Ts fonksiyon, e / s şeklinde bir terim içeriyorsa, bu fonksiyonun z-dönüşümü kısa yoldan bulunabilir (bu terimin, bir sıfırıncı mertebeden tutucunun transfer fonksiyonu olduğunu hatırlayınız). z-dönüşümü bulunacak olan X() s fonksiyonunu, Ts e X ( s) G( s) s şeklinde yazalım. Bu durumda, X() s in z-dönüşümü olan X() z şu şekilde bulunur: Gs () X ( z) X ( s) z s 0
11 Ör: Aşağıda verilen fonksiyonun z-dönüşümünü bulunuz. C: Ts e X() s s s X ( z) X ( s) z ss ( ) z s s z T z e z e e T T z z İmpals (Darbecik) Örnekleme ve Veri Tutma z-dönüşümünün Konvolüsyon İntegrali Yöntemi ile Elde Edilmesi Örneklenmiş Sinyalden Gerçek Sinyalin Yeniden Elde Edilmesi Pals (Darbe) Transfer Fonksiyonu Sayısal Kontrolörlerin ve Sayısal Filtrelerin Gerçeklenmesi
12 Örneklenmiş Sinyalden Gerçek Sinyalin Yeniden Elde Edilmesi Eğer örnekleme frekansı, sürekli-zaman sinyalinin en yüksek frekanslı bileşeninden yeterince fazla ise, örneklenmiş sinyalde sürekli-zaman sinyalinin genlik karakteristiği korunur. Örneklenmiş sinyalden orijinal sinyali elde etmek için, örnekleme işleminin sağlaması gereken belirli bir minimum frekans değeri vardır. Bu minimum örnekleme frekansı, Örnekleme Teoremi ile belirlenir. Örnekleme teoremini açıklarken, sürekli-zaman sinyali xt () nin aşağıdaki gibi bir frekans spektrumuna sahip olduğunu kabul edeceğiz. Yani xt () sinyali, rad/sn frekansından daha yüksek frekans komponentleri içermemektedir. Örnekleme Teoremi: T örnekleme periyodu ve 2 / T olmak üzere, eğer s s 2 şartı sağlanıyorsa, orijinal sürekli-zaman sinyali xt () nin, örneklenmiş sinyal x () t üretilmesi (teorik olarak) mümkündür. den tekrar Aslında yukarıda koşul, orijinal sinyalin, örneklenmiş sinyalden yeniden üretilebilmesi için minimum şartı verir. Pratikte ise sayısal kontrol sistemlerinin kararlılığı için örnekleme frekansı, genellikle 0 ile 20 arasında seçilir. s 2
13 İdeal Alçak Geçiren Filtre: İdeal bir alçak geçiren filtrenin frekans spektrumu aşağıdaki şekilde görülmektedir. İdeal alçak geçiren filtrenin genliği, s s aralığında birimdir (yani 2 2 girişteki sinyalin genliğini değiştirmez). Örnekleme işlemi, maalesef örneklenmiş sinyale çok sayıda yüksek frekans bileşeni ekler. İdeal alçak geçiren filtre, sadece temel bileşeni geçirir, yüksek frekans bileşenlerini durdurur. Ancak ideal alçak geçiren filtre pratikte gerçeklenemez. Yani pratikte filtre edilen sinyal bazı yüksek frekans bileşenlerini de içerir. Bu nedenle her ne kadar örnekleme frekansı yukarıda belirtilen kriteri sağlayacak şekilde seçilse de, örneklenmiş sinyalden orijinal sinyalin kusursuz şekilde tekrar üretilmesi mümkün değildir. Sıfırıncı Mertebeden Tutucunun Frekans Karakteristiği: Daha önce sıfırıncı mertebeden tutucunun transfer fonksiyonunun G h0 e s Ts şeklinde olduğunu bulmuştuk. Aşağıdaki şekil, alçak geçiren filtrenin frekans karakteristiği ile, sıfırıncı mertebeden tutucunun yukarıda verilen transfer fonksiyonu kullanılarak elde edilen frekans karakteristiğini aynı grafik üzerinde göstermektedir. 3
14 Grafikten anlıyoruz ki, sıfırıncı mertebeden tutucunun frekans karakteristiği, alçak geçiren filtrenin filtrenin frekans karakteristiğine benzemekte, yani sıfırıncı mertebeden tutucu bir alçak geçiren filtre gibi davranmaktadır. Ancak bir farkla; sıfırıncı mertebeden tutucunun frekans karaktersitiği, frekansından sonra bazı istenmeyen ek bileşenler içermektedir. Bu ek bileşenlerin genliği, 2 s örnekleme frekansının tamsayı katlarında sıfır olmakta, buçuklu katlarında ise maksimum değerini almaktadır. Eğer örnekleme işleminden önce bir alçak geçiren filtre kullanılırsa, bu istenmeyen ek bileşenler büyük oranda elimine edilir ve sıfırıncı mertebeden tutucu, tutma fonksiyonuna ek olarak bir de alçak geçiren filtre gibi görev yapar. Hazır konu frekans cevabından açılmışken, örnekleme işleminin mevcut olduğu sistemlerde meydana gelen birkaç olaydan bahsedelim: 4
15 Katlanma (Folding): Aşağıdaki şekilde görüldüğü gibi, frekans spektrumu üzerinde üst üste binme (çakışma) olayı Katlanma olarak adlandırılır. Bu şekil aynı zamanda katlanma olayının olduğu bölgeyi de göstermektedir. frekansı, Katlanma Frekansı ya da Nyquist Frekansı olarak 2 s anılır. Pratikte, kontrol sistemlerindeki sinyaller genellikle yüksek frekans bileşenleri içerirler ve bu nedenle katlanma olayı neredeyse her zaman mevcuttur. Örtüşme (Aliasing): Bir xt () sürekli zaman sinyali örneklenip x () t elde edilirken, eğer örnekleme frekansı s 2 şeklinde seçilirse, örneklenmiş sinyalin frekans spektrumunun bazı bölgelerinde aşağıdaki şekilde görüldüğü gibi herhangi bir değeri için iki ayrı bileşen oluşur. Bu olaya Örtüşme denir. Bunu engellemek için ya örnekleme frekansı yeterince büyük seçilmeli ya da örnekleyicinin önüne bir filtre konulmalıdır. 5
16 Gizli Osilasyon: Eğer örneklenecek olan sürekli-zaman sinyali xt (), n bir pozitif tamsayı olmak üzere örnekleme frekansı s in n katı frekansa sahip bileşenler içeriyorsa, bu bileşenler örneklenmiş sinyalde görülmeyecektir. Yani örneklenecek sinyal n s bileşenine sahip bir osilasyon içerirken, örneklenmiş sinyal böyle bir osilasyonu, yani bu bileşenin etkisini örnekleme anlarında barındırmayacaktır. Bu bileşene ilişkin osilasyon sadece iki örnekleme anı arasında mevcuttur ancak örnekleme anlarında mevcut değildir. Bu olaya gizli osilasyon denir. Örneğin xt () sinyalinin, x( t) x( t) x2( t) sint sin3t şeklinde iki ayrı bileşenden oluştuğunu düşünelim. Burada örnekleme frekansı s 3 rad/sn olarak seçilirse, sin3t bileşenine ilişkin osilasyon, örneklenmiş sinyalde görülmez. Aşağıdaki şekil, bu durumu görsel olarak anlatmaktadır. 6
17 İmpals (Darbecik) Örnekleme ve Veri Tutma z-dönüşümünün Konvolüsyon İntegrali Yöntemi ile Elde Edilmesi Örneklenmiş Sinyalden Gerçek Sinyalin Yeniden Elde Edilmesi Pals (Darbe) Transfer Fonksiyonu Sayısal Kontrolörlerin ve Sayısal Filtrelerin Gerçeklenmesi Pals (Darbe) Transfer Fonksiyonu Analog kontrol sistemlerinde transfer fonksiyonu, sürekli-zaman çıkış sinyalinin Laplace Dönüşümü ile sürekli-zaman giriş sinyalinin Laplace dönüşümünü ilişkilendirir. Sayısal kontrol sistemlerinde Pals Transfer Fonksiyonu, örneklenmiş çıkışın z-dönüşümü ile örneklenmiş girişin z-dönüşümünü ilişkilendirir. Aşağıdaki şekilde görülen analog kontrol sisteminde çıkış ile girişin zamana bağlı ifadesi şu şekildedir: t y() t g t x d x t g d 0 0 xt () Gs () yt () Bu integral, konvolüsyon integrali olarak adlandırılır. Aşağıdaki şekilde görüldüğü gibi, giriş ve çıkış sinyalleri örneklenirse, bu durumda örneklenmiş çıkış ile örneklenmiş giriş arasındaki bağıntı şu şekilde ifade edilir: k y( kt ) g( kt ht ) x( ht ) x( kt ht ) g( ht ) h0 h0 t k Bu toplam, konvolüsyon toplamı olarak adlandırılır ve basitleştirilmiş notasyonla y( kt ) x( kt ) g( kt ) şeklinde gösterilir. 7
18 Aşağıdaki gibi, girişi () X z, transfer fonksiyonu Gz () ve çıkışı Y() z ile gösterilen bir sistemin Darbe Transfer Fonksiyonu şu şekildedir: Gz () Y() z X() z Dikkat edilirse burada eğer giriş sinyali Kronecker Delta Girişi, yani olursa, Kronecker Delta Girişinin z-dönüşümü, k 0 x( kt) 0( kt ) 0, k 0 k X ( z) x( kt ) z olduğu için, çıkış doğrudan transfer fonksiyonuna eşit olacaktır, Y( z) G( z). k0 Sayısal kontrol sistemlerinde, sistemdeki sinyallerin bazıları impals örneklenmiş sinyaller iken bazıları değildir. Sistemi analiz edebilmek için, sistemin pals transfer fonksiyonunun elde edilmesi gerekir. Pals transfer fonksiyonunun elde edilebilmesi için, sinyallerin z-domeninde ifade edilebilmesi gerekir. Dolayısıyla sinyallerin impals örneklenmiş olup olmadıkları, pals transfer fonksiyonunun yazılması açısından büyük önem taşır. Aşağıdaki şekilde görülen basit sistemde, sistem girişinin bir impals örnekleyici ile örneklendiğini ve sistemin s-domenindeki transfer fonksiyonunun Gs () olduğunu düşünelim. 8
19 Bu sistemde çıkışın ifadesi Y( s) G( s) X ( s) şeklindedir. Yani çıkış, periyodu 2 / s olan periyodik sinyal X () s ile, periyodik olmayan Gs () in çarpımına eşittir. İmpals örneklenmiş sinyaller periyodik sinyallerdir çünkü X ( s) X ( s j k) dır. Yukarıdaki denklemin her iki tarafının yıldızlı (impals örneklenmiş) formuna bakalım: s Y ( s) G( s) X ( s) G( s) X ( s) G ( s) X ( s) Bu ifade, pals transfer fonksiyonunun elde edilmesi açısından oldukça önemlidir. Çünkü Y ( s) G ( s) X ( s) denklemindeki tüm sinyaller yıldızlı (impals örneklenmiş) sinyaller olduğu için, bu sinyallerin her birinin z-dönüşümünün alınması suretiyle, sistemin pals transfer fonksiyonu Gz () Y() z X() z yazılabilir. Özetle eğer ilgili bloğun girişinde bir impals örnekleyici varsa, her ne kadar Gs () periyodik olmayan bir sinyal olsa da Gs in () impals örneklenmiş formunun z-dönüşümü bulunarak sistemin pals transfer fonksiyonu yazılabilir ve bu yolla sistemin z-domeninde analizi yapılabilir.! Peki bloğun girişinde bir impals örnekleyici yoksa? Bu durumu incelemek için aşağıdaki blok diyagramı göz önünde bulunduralım. Burada frekans domenindeki transfer fonksiyonu, Ys () Gs () X() s şeklindedir ancak Pals Transfer Fonksiyonu () bir impals örnekleyici yoktur. 9 Gz maalesef Gs () e eşit değildir. Çünkü girişte
20 Bu sistemde çıkışın ifadesi, Y( s) G( s) X ( s) şeklindedir. Her iki tarafın impals örneklenmiş hali; Y ( s) G( s) X ( s) GX ( s) şeklindedir ve bu denklemin her iki tarafının z-dönüşümü alınırsa Y( z) Y( s) G( s) X ( s) GX ( s) GX ( z) G( z) X ( z) Eğer girişte bir impals örnekleyici yoksa, G( s) X ( s ) in z-dönüşümünün G( z) X ( z ) e eşit olmadığı, bu dersin ilerleyen kısımlarında daha detaylı olarak tartışılacaktır. Şimdi darbe transfer fonksiyonunun elde edilmesine ilişkin örneklere bakalım. Ör: Şekilde verilen sistemde eğer Gs () s a şeklinde ise, sistemin pals transfer fonksiyonunu bulunuz. C: Girişte bir impals örnekleyici mevcut olduğu için, bu sistemin pals transfer fonksiyonu doğrudan G( z) G( s) şeklinde bulunur. Verilen Gs () transfer fonksiyonunun z-dönüşümü iki farklı yoldan bulunabilir. Birinci yol, z-dönüşümü anlatılırken sunulan z-dönüşüm Tablosuna başvurmaktır. Bu tablodan, bulunur. Dolayısıyla pals transfer fonksiyonu at s a e z 20
21 Gz () at e z olarak elde edilir. İkinci yol, s-domeninde verilen fonksiyonun Ters Laplace Dönüşümü yoluyla zaman domenindeki ifadesi gt () yi bulup, z-dönüşüm formülü yardımıyla Gz () yi hesaplamaktır: at g( t) G( s) e akt g( kt ) e, k 0,,2,3,... ( ) ( ) k0 k0 k0 k akt k at G z g kt z e z e z e at z Herhangi bir bloğun ya da sistemin çıkışında impals örnekleyici olup olmaması darbe transfer fonksiyonunu etkilemez. Eğer çıkışta bir örnekleyici yoksa da varmış kabul edilebilir. Çünkü çıkış sinyali sürekli olsa bile, bu sinyalin sadece t=kt anlarındaki değerleri göz önünde bulundurularak, analiz buna göre yapılabilir. k 2
22 Ör: Şekilde verilen sistemde eğer Ts e Gs () s s s şeklinde ise, sistemin pals transfer fonksiyonunu bulunuz. C: Girişte bir impals örnekleyici mevcut olduğu için, bu sistemin pals transfer fonksiyonu doğrudan G( z) G( s) şeklinde bulunur. Verilen Gs () transfer fonksiyonunun z-dönüşümü iki farklı yoldan bulunabilir. Birinci yol, z-dönüşümü anlatılırken sunulan z-dönüşüm Tablosuna Ts başvurmaktır. e / s terimi içeren fonksiyonların z-dönüşümünün hesaplanması için özel bir formülasyon elde etmiştik. Buna göre, Ts e G( z) G( s) s ss z 2 s z 2 s s s s Tz z e z z z T T T T z e z 2 T T e z e Te z 2 bulunur. Pals transfer fonksiyonunu ikinci yoldan bulabilir misiniz? 22
23 Kaskat Bağlı Elemanların Pals Transfer Fonksiyonu: Transfer fonksiyonları Gs () ve Hs () olan iki bileşenin aşağıda blok diyagramda görüldüğü gibi kaskat (seri) bağlandığını düşünelim. Bu sistemin pals transfer fonksiyonunu türetelim (Tüm örnekleyicilerin senkronize edildiğini ve aynı örnekleme periyoduna sahip olduğunu düşünelim). Blok diyagramdan görüldüğü gibi, U ( s) G( s) X ( s) Y( s) H( s) U ( s) Bu denklemlerin her iki tarafının impals örneklenmiş formu; U ( s) G ( s) X ( s) Y ( s) H ( s) U ( s) şeklinde olur. Buradan, Y ( s) H ( s) U ( s) H ( s) G ( s) X ( s) ve z-domeninde Y( z) H( z) G( z) X ( z) elde edilir. Sonuç olarak bu kaskat bağlı sistemin pals transfer fonksiyonu, Y() z G( z) H( z) X() z olur. 23
24 Şimdi de aşağıdaki kaskat bağlı sistemin pals transfer fonksiyonunu bulalım. Dikkat edilirse burada Gs () ile Hs () blokları arasında bir impals örnekleyici yoktur. Çıkış ifadesi, Y( s) G( s) H( s) X ( s) GH ( s) X ( s) şeklindedir. Yani, GH ( s) G( s) H( s) dir. Çıkış denkleminin her iki tarafının impals örneklenmiş hali, Y ( s) GH ( s) X ( s) olur. Bu durumda, yukarıdaki denklemin z-domenindeki ifadesi Y( z) GH ( z) X ( z) ve dolayısıyla pals transfer fonksiyonu olur. Aşağıdaki ayrıntıya dikkat edilmelidir: Y() z GH ( z) GH ( s) X() z G( z) H( z) GH ( z) GH ( s) Diğer bir ifadeyle, G s H s G( z) H ( z) G( s) H( s) GH ( z) ( ) ( ) Bu önemli ayrıntıyı bir örnekle açıklayalım. 24
25 Ör: Aşağıda Şekil (a) ve Şekil (b) de verilen sistemlerin her biri için Y( z) / X ( z ) pals transfer fonksiyonunu bulunuz. C: Şekil (a) da verilen sistemde Gs () ile Hs () arasında bir impals örnekleyici mevcuttur. Bu nedenle pals transfer fonksiyonu Y() z G( z) H( z) X() z şeklindedir. Verilen Gz () ve H() z ifadeleri için pals transfer fonksiyonunu hesaplayalım. Y( z) G( z) H( z) X ( z) s a s b e z e z at bt 25
26 Şekil (b) de verilen sistem için pals transfer fonksiyonu ise Y( z) GH () z X () z s a s b Parantez içindeki ifade kısmi kesirlerine ayrılırsa, Y( z) GH ( z) X ( z) b a s a s b at bt b a e z e z at bt e e z at bt b a e z e z Bu örnekten görüldüğü üzere, G( z) H( z) GH ( z) dir. Pals transfer fonksiyonu elde edilirken, kaskat bağlı elemanların arasında bir impals örnekleyici olup olmadığına dikkat edilmelidir. 26
27 Kapalı Çevrim Sistemlerin Pals Transfer Fonksiyonu: Kapalı çevrim bir sistemde, çevrimin içinde bir örnekleyici olup olmaması, sistemin dinamik davranışını etkiler. Çevrimin dışında örnekleyici olup olmaması ise sistem davranışını etkilemez. Aşağıdaki kapalı çevrim sistemi göz önünde bulunduralım. Bu sistemde hata sinyali örneklenmektedir. Blok diyagramdan görüleceği üzere, Dolayısıyla, E( s) R( s) H( s) C( s) C( s) G( s) E ( s) E( s) R( s) H( s) G( s) E ( s) Bu denklemin her iki tarafının impals örneklenmiş hali, E ( s) R ( s) GH ( s) E ( s) şeklindedir. Bu denklem Es () için çözülürse, hata transfer fonksiyonu R () s E () s GH ( s) olarak bulunur. Çıkış ifadesi C ( s) G ( s) E ( s) olduğu için, G ( s) R ( s) C () s GH ( s) 27
28 şeklindedir. Bu ifade z-domeninde G( z) R( z) Cz () GH ( z ) olarak yazılır. Buradan, bu sistemin pals transfer fonksiyonu olarak elde edilir. C( z) G( z) R( z) GH ( z) Eğer Gsbloğunun () çıkışında da aşağıdaki gibi bir impals örnekleyici olsaydı, bu durumda pals transfer fonksiyonu olacaktı. C( z) G( z) R( z) G( z) H( z) Aşağıdaki tablo, çeşitli kapalı çevrim blok diyagramlar için çıkışın z-domenindeki ifadesini vermektedir. Tüm bloklarda örnekleyicilerin senkron ve aynı örnekleme frekansına sahip olduğu kabul edilmektedir. Dikkat edilirse bazı sistemlerde C( z) / R( z ) ifadesi yazılamamaktadır (çünkü Rz () denklemin diğer tarafına geçirilememektedir), yani bu sistemlerin pals transfer fonksiyonu yoktur. Her ne kadar bazı konfigürasyonlar için pals transfer fonksiyonu yazılamasa da, şu ana kadar öğrendiğimiz yöntemler bu sistemlerin analizi için halen uygulanabilir. 28
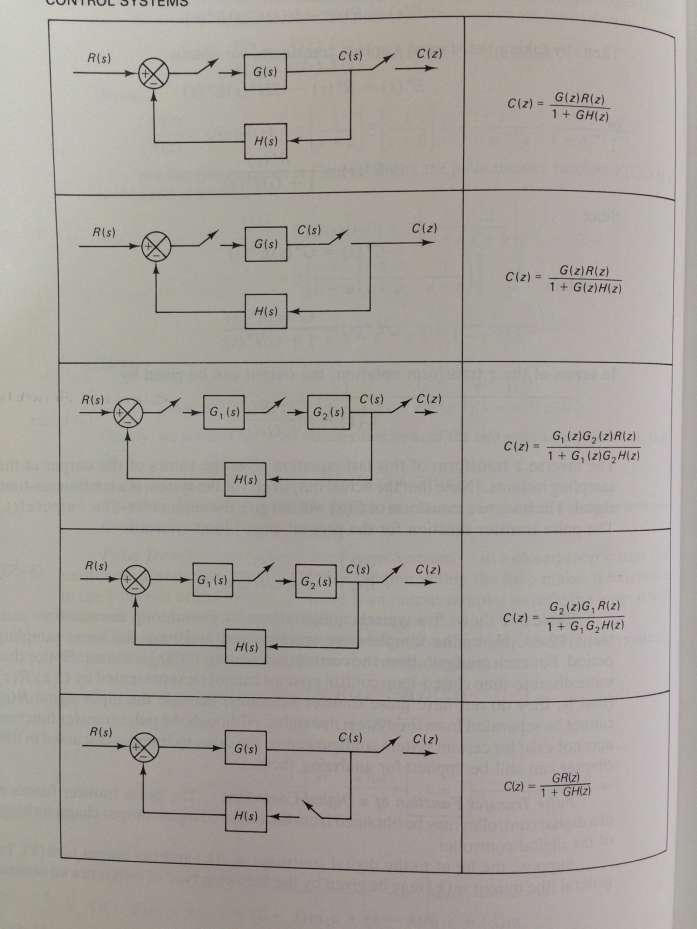
29 29
 de ise bu blokların her birinin transfer fonksiyonu gösterilmektedir. Sayısal kontrolörün transfer fonksiyonu G () s ile gösterilmiştir.")
, geribesleme yolu üzerinden giriş rt () ile karşılaştırılır ve bu karşılaştırma sonucunda üretilen hata sinyali e( t) r( t) c( t) örneklenir, daha sonra bir bu sinyal bir")
30 Kapalı Çevrim Sayısal Kontrol Sistemlerinin Pals Transfer Fonksiyonu: Aşağıda Şekil (a) da bir sayısal kontrol sisteminin en temel blok diyagramı görülmektedir. Şekil (b) de ise bu blokların her birinin transfer fonksiyonu gösterilmektedir. Sayısal kontrolörün transfer fonksiyonu G () s ile gösterilmiştir. Bilgisayar (sayısal kontrolör), girişçıkış ilişkisi G () z pals transfer fonksiyonu ile verilen fark denklemini çözer. D D Bu sistemde çıkış ct (), geribesleme yolu üzerinden giriş rt () ile karşılaştırılır ve bu karşılaştırma sonucunda üretilen hata sinyali e( t) r( t) c( t) örneklenir, daha sonra bir bu sinyal bir A/D dönüştürücü vasıtasıyla bir sayısal sinyale dönüştürülür. Sayısal sinyal e( kt ) kontrolöre beslenir ve kontrolör m( kt ) sinyalini üretir. e( kt ) ile m( kt ) arasındaki ilişki, darbe transfer fonksiyonu G () z tarafından belirlenir. Yani G () D z in kutupları uygun şekilde seçilerek, arzu edilen giriş-çıkış karakteristiği elde edilir. Şekil (b) yi göz önünde bulundurarak bu kapalı çevrim sistemin transfer fonksiyonunu türetelim. Şekil (b) den görüleceği üzere, e s Ts G ( s) G( s) p 30 D
31 şeklindedir. Ayrıca yine Şekil (b) den C( s) G( s) G ( s) E ( s) D ya da impals örneklenmiş formda elde edilir. Bu denklem z-domeninde C ( s) G ( s) G ( s) E ( s) C( z) G( z) G ( z) E( z) şeklinde ifade edilir. E( z) R( z) C( z) olduğu için, C( z) G( z) G ( z) R( z) C( z) olur ve buradan kapalı çevrim pals transfer fonksiyonu D C( z) GD( z) G( z) R( z) G ( z) G( z) şeklinde elde edilir. Bu denklem bir sayısal kontrol sisteminin kapalı çevrim darbe transfer fonksiyonunu verir. Böyle bir kapalı çevrim sayısal kontrol sisteminin performansı, pals transfer fonksiyonu G () z in (yani kontrolörün) uygun bir şekilde seçimi yoluyla iyileştirilebilir. Dersin D ileriki haftalarında, G () z in (yani kontrolörün) tasarımı için çok sayıda yöntem göreceğiz. Şimdi D ise burada G () z in tasarımı için sadece basit bir kontrolörün yapısını sunacağız: Sayısal PID kontrolör. D D D D 3
32 Sayısal PID Kontrolörün Pals Transfer Fonksiyonu: Elli yıldan fazla bir süredir, analog PID kontrolörler endüstride yaygın olarak kullanılmaktadır. PID kontrolün temel prensibi, manipüle edilecek değişkenin üzerinde üç temel kontrol aksiyonunu etki ettirmektir: () Oransal (Proportional) kontrol aksiyonu, (2) Integral kontrol aksiyonu, (3) Türevsel (Derivative) kontrol aksiyonu. Analog PID kontrolörün denklemi, t de( t) m( t) K e( t) e( t) dt Td T i dt 0 şeklindedir. Burada et () kontrolör giriş sinyali (hata sinyali), mt () kontrolör çıkış sinyali, K oransal kazanç, T i integral zamanı, T d türev zamanı olarak adlandırılır. Sayısal PID kontrolörün pals transfer fonksiyonunu elde etmek için, yukarıdaki denklem önce ayrıklaştırılmalı (yani m( kt ) ve e( kt ) ifadeleri bulunmalı) ve daha sonra da z-dönüşümü yardımıyla çıkış M() z ile giriş Ez () arasındaki pals transfer fonksiyonu yazılmalıdır. Denklemdeki türev ve integral işlemleri için uygun ayrıklaştırma yöntemleri kullanılırsa, sayısal PID kontrolörün pals transfer fonksiyonu aşağıdaki gibi elde edilir: Burada, KT K K p K K 2T 2 K K I D KT T i KTd T i : İntegral kazancı : Türev kazancı I M () z KI GD( z) K p K D z E( z) z : Oransal kazanç olarak isimlendirilir. Türev ve integral içeren terimlerin ayrıklaştırılması için faklı nümerik yaklaşımlar kullanıldığında, sayısal PID kontrolörün farklı pals transfer fonksiyonu ifadeleri elde edilebilir ancak yukarıdaki form, yaygın olarak kullanılan formdur. 32
33 Ör: Aşağıdaki şekilde görülen PID kontrolörde plantın (kontrol edilecek sistemin) transfer fonksiyonu, Gp () s ss ( ) şeklindedir. Örnekleme periyodu ise T= sn olarak seçilmiştir. Kontrol kazançlarının değeri K p, K 0.2, ve K 0.2 olarak seçilirse, sistemin kapalı çevrim transfer fonksiyonunu bulunuz. I D C: Örnekleme periyodu sn olduğuna göre, sıfırıncı mertebeden tutucunun transfer fonksiyonu, e Gh () s s olur. Bu durumda plant+tutucunun transfer fonksiyonunun z-dönüşümü s Gz () e z z s s( s ) z z s 2 olarak bulunur. Eşdeğer blok diyagram aşağıdaki gibi elde edilir: Kontrol kazançları için verilen değerler, sayısal PID kontrolörün daha önce elde edilen transfer fonksiyonunda yerine yazılırsa, kontrolörün transfer fonksiyonu şu şekilde olur: 33
34 Böylece kapalı çevrim transfer fonksiyonu ise olarak elde edilir. G D.4.4z 0.2z () z z 2 C( z) GD( z) G( z) 0.55z 0.452z z z R( z) G ( z) G( z).8528z.5906z z z D Geçici Durum Cevabının MATLAB ile Çizdirilmesi: Yukarıdaki örnekte elde edilen PID kontrolörün geçici durum cevabını k=40 örnek için çizdirelim. Bu durumda giriş sinyali rt (), MATLAB ortamında r=ones(,4) komut satırıyla tanıtılır. Aşağıdaki kod parçası, örnekte verilen sistemin sistemin birim adım girişine cevabını (k ya karşılık c(k) nın değişimini) çizdirir. num = [ ]; den = [ ]; r = ones(,4); k = 0:40; c = filter(num,den,r); plot(k,c, o,k,c, - ) 34
35 Aynı sistemin rampa girişine cevabı ise aşağıdaki kod ile çizdirilir ve şekildeki gibi bir değişim elde edilir. num = [ ]; den = [ ]; k = 0:40; r = [k]; c = filter(num,den,r); plot(k,c, o,k,c, -,k,k, ) 35
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Sürekli-zaman İşaretlerin Ayrık İşlenmesi
 Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Bu ders boyunca, ilk önce sayısal kontrol sistemlerinin temellerini tanıtıp, daha sonra birkaç temel pratik uygulamasından bahsedeceğiz.
 Özellikle 2000 li yıllarda dijital teknolojideki gelişmeler, dijital (sayısal) kontrol sistemlerini analog kontrol sistemleriyle rekabet açısından 90 lı yıllara göre daha üst seviyelere taşımıştır. Düşük
Özellikle 2000 li yıllarda dijital teknolojideki gelişmeler, dijital (sayısal) kontrol sistemlerini analog kontrol sistemleriyle rekabet açısından 90 lı yıllara göre daha üst seviyelere taşımıştır. Düşük
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
Şeklinde ifade edilir. Çift yan bant modülasyonlu işaret ise aşağıdaki biçimdedir. ile çarpılırsa frekans alanında bu sinyal w o kadar kayar.
 GENLİK MODÜLASYONU Mesaj sinyali m(t) nin taşıyıcı sinyal olan c(t) nin genliğini modüle etmesine genlik modülasyonu (GM) denir. Çeşitli genlik modülasyonu türleri vardır, bunlar: Çift yan bant modülasyonu,
GENLİK MODÜLASYONU Mesaj sinyali m(t) nin taşıyıcı sinyal olan c(t) nin genliğini modüle etmesine genlik modülasyonu (GM) denir. Çeşitli genlik modülasyonu türleri vardır, bunlar: Çift yan bant modülasyonu,
( ) (0) ( ) (2 )... ( )...
 (0) ( ) (2 )... ( )...") Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
ZAMAN VE FREKANS DOMENLERİNDE ÖRNEKLEME
 Bölüm 6 ZAMAN VE FREKANS DOMENLERİNDE ÖRNEKLEME VE ÖRTÜŞME 12 Bölüm 6. Zaman ve Frekans Domenlerinde Örnekleme ve Örtüşme 6.1 GİRİŞ Bu bölümün amacı, verilen bir işaretin zaman veya frekans domenlerinden
Bölüm 6 ZAMAN VE FREKANS DOMENLERİNDE ÖRNEKLEME VE ÖRTÜŞME 12 Bölüm 6. Zaman ve Frekans Domenlerinde Örnekleme ve Örtüşme 6.1 GİRİŞ Bu bölümün amacı, verilen bir işaretin zaman veya frekans domenlerinden
Sayısal Kontrol - HAVA HARP OKULU
 Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
BÖLÜM 1 TEMEL KAVRAMLAR
 BÖLÜM 1 TEMEL KAVRAMLAR Bölümün Amacı Öğrenci, Analog haberleşmeye kıyasla sayısal iletişimin temel ilkelerini ve sayısal haberleşmede geçen temel kavramları öğrenecek ve örnekleme teoremini anlayabilecektir.
BÖLÜM 1 TEMEL KAVRAMLAR Bölümün Amacı Öğrenci, Analog haberleşmeye kıyasla sayısal iletişimin temel ilkelerini ve sayısal haberleşmede geçen temel kavramları öğrenecek ve örnekleme teoremini anlayabilecektir.
HAFTA 11: ÖRNEKLEME TEOREMİ SAMPLING THEOREM. İçindekiler
 HAFA 11: ÖRNEKLEME EOREMİ SAMPLING HEOREM İçindekiler 6.1 Bant sınırlı sürekli zaman sinyallerinin örneklenmesi... 2 6.2 Düzgün (uniform), periyodik örnekleme... 3 6.3 Bant sınırlı sürekli bir zaman sinyaline
HAFA 11: ÖRNEKLEME EOREMİ SAMPLING HEOREM İçindekiler 6.1 Bant sınırlı sürekli zaman sinyallerinin örneklenmesi... 2 6.2 Düzgün (uniform), periyodik örnekleme... 3 6.3 Bant sınırlı sürekli bir zaman sinyaline
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER
 TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
Analog Alçak Geçiren Filtre Karakteristikleri
 Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
İşaret ve Sistemler. Ders 3: Periyodik İşaretlerin Frekans Spektrumu
 İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
İşaret ve Sistemler Ders 3: Periyodik İşaretlerin Frekans Spektrumu Fourier Serileri Periyodik işaretlerin spektral analizini yapabilmek için periyodik işaretler sinüzoidal işaretlerin toplamına dönüştürülür
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI
 DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
İşaret ve Sistemler. Ders 2: Spektral Analize Giriş
 İşaret ve Sistemler Ders 2: Spektral Analize Giriş Spektral Analiz A 1.Cos (2 f 1 t+ 1 ) ile belirtilen işaret: f 1 Hz frekansında, A 1 genliğinde ve fazı da Cos(2 f 1 t) ye göre 1 olan parametrelere sahiptir.
İşaret ve Sistemler Ders 2: Spektral Analize Giriş Spektral Analiz A 1.Cos (2 f 1 t+ 1 ) ile belirtilen işaret: f 1 Hz frekansında, A 1 genliğinde ve fazı da Cos(2 f 1 t) ye göre 1 olan parametrelere sahiptir.
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
İşaret ve Sistemler. Ders 1: Giriş
 İşaret ve Sistemler Ders 1: Giriş Ders 1 Genel Bakış Haberleşme sistemlerinde temel kavramlar İşaretin tanımı ve çeşitleri Spektral Analiz Fazörlerin frekans düzleminde gösterilmesi. Periyodik işaretlerin
İşaret ve Sistemler Ders 1: Giriş Ders 1 Genel Bakış Haberleşme sistemlerinde temel kavramlar İşaretin tanımı ve çeşitleri Spektral Analiz Fazörlerin frekans düzleminde gösterilmesi. Periyodik işaretlerin
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
DENEY NO : 4 DENEY ADI : Darbe Genişlik Demodülatörleri
 DENEY NO : 4 DENEY ADI : Darbe Genişlik Demodülatörleri DENEYİN AMACI :Darbe Genişlik Demodülatörünün çalışma prensibinin anlaşılması. Çarpım detektörü kullanarak bir darbe genişlik demodülatörünün gerçekleştirilmesi.
DENEY NO : 4 DENEY ADI : Darbe Genişlik Demodülatörleri DENEYİN AMACI :Darbe Genişlik Demodülatörünün çalışma prensibinin anlaşılması. Çarpım detektörü kullanarak bir darbe genişlik demodülatörünün gerçekleştirilmesi.
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ İLETİŞİM LABORATUARI SAYISAL FİLTRELER
 SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop. Teorik Bilgi
, bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop. Teorik Bilgi") DENEY 8: PASİF FİLTRELER Deneyin Amaçları Pasif filtre devrelerinin çalışma mantığını anlamak. Deney Malzemeleri Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop.
DENEY 8: PASİF FİLTRELER Deneyin Amaçları Pasif filtre devrelerinin çalışma mantığını anlamak. Deney Malzemeleri Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop.
Ders İçerik Bilgisi. Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
SÜREKLİ VE AYRIK ZAMANLI KONTROL SİSTEMLERİNDE KULLANILAN TEMEL MATEMATİKSEL OPERASYONLAR VE KARAKTERİSTİKLERİ
 FIRT ÜNİVERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ EMÜ419 OTOMTİK KONTROL LORTURI DENEY 1 SÜREKLİ VE YRIK ZMNLI KONTROL SİSTEMLERİNDE KULLNILN TEMEL MTEMTİKSEL OPERSYONLR VE KRKTERİSTİKLERİ
FIRT ÜNİVERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ EMÜ419 OTOMTİK KONTROL LORTURI DENEY 1 SÜREKLİ VE YRIK ZMNLI KONTROL SİSTEMLERİNDE KULLNILN TEMEL MTEMTİKSEL OPERSYONLR VE KRKTERİSTİKLERİ
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
Sayısal Filtre Tasarımı
 Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
Deney 5 : Ayrık Filtre Tasarımı. Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç
 İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma
 Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
Bölüm 2. İşaretler ve Doğrusal Sistemler
 Bölüm 2 İşaretler ve Doğrusal Sistemler 2.1 TEMEL KAVRAMLAR 2.1.1 İşaret Üzerinde Temel İşlemler 2.1.2.İşaretlerin Sınıflandırılması 2.1.3 Bazı Önemli İşaretler ve Özellikleri 2.1.4. Sistemlerin Sınıflandırılması
Bölüm 2 İşaretler ve Doğrusal Sistemler 2.1 TEMEL KAVRAMLAR 2.1.1 İşaret Üzerinde Temel İşlemler 2.1.2.İşaretlerin Sınıflandırılması 2.1.3 Bazı Önemli İşaretler ve Özellikleri 2.1.4. Sistemlerin Sınıflandırılması
Bölüm 16 CVSD Sistemi
 Bölüm 16 CVSD Sistemi 16.1 AMAÇ 1. DM sisteminin çalışma prensibinin incelenmesi. 2. CVSD sisteminin çalışma prensibinin incelenmesi. 3. CVSD modülatör ve demodülatör yapılarının gerçeklenmesi. 16.2 TEMEL
Bölüm 16 CVSD Sistemi 16.1 AMAÇ 1. DM sisteminin çalışma prensibinin incelenmesi. 2. CVSD sisteminin çalışma prensibinin incelenmesi. 3. CVSD modülatör ve demodülatör yapılarının gerçeklenmesi. 16.2 TEMEL
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü ELK 2008 DEVRELER II LABORATUARI
 DİRENÇ-ENDÜKTANS VE DİRENÇ KAPASİTANS FİLTRE DEVRELERİ HAZIRLIK ÇALIŞMALARI 1. Alçak geçiren filtre devrelerinin çalışmasını anlatınız. 2. Yüksek geçiren filtre devrelerinin çalışmasını anlatınız. 3. R-L
DİRENÇ-ENDÜKTANS VE DİRENÇ KAPASİTANS FİLTRE DEVRELERİ HAZIRLIK ÇALIŞMALARI 1. Alçak geçiren filtre devrelerinin çalışmasını anlatınız. 2. Yüksek geçiren filtre devrelerinin çalışmasını anlatınız. 3. R-L
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU. Deney No: 3 PID KONTROLÜ
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
Enerji Sistemleri Mühendisliği Bölümü
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 History in Pictures - On January 5th, 1940, Edwin H. Armstrong transmitted thefirstfmradiosignalfromyonkers, NY to Alpine, NJ to Meriden, CT to Paxton, MA to Mount Washington. 5 January is National FM
History in Pictures - On January 5th, 1940, Edwin H. Armstrong transmitted thefirstfmradiosignalfromyonkers, NY to Alpine, NJ to Meriden, CT to Paxton, MA to Mount Washington. 5 January is National FM
DENEY 5. Pasif Filtreler
 ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM24 Elektrik Devreleri Laboratuarı II 2425 Bahar DENEY 5 Pasif Filtreler Deneyi Yapanın Değerlendirme Adı Soyadı : Ön
ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM24 Elektrik Devreleri Laboratuarı II 2425 Bahar DENEY 5 Pasif Filtreler Deneyi Yapanın Değerlendirme Adı Soyadı : Ön
Bant Sınırlı TBGG Kanallarda Sayısal İletim
 Bant Sınırlı TBGG Kanallarda Sayısal İletim Bu bölümde, bant sınırlı doğrusal süzgeç olarak modellenen bir kanal üzerinde sayısal iletimi inceleyeceğiz. Bant sınırlı kanallar pratikte çok kez karşımıza
Bant Sınırlı TBGG Kanallarda Sayısal İletim Bu bölümde, bant sınırlı doğrusal süzgeç olarak modellenen bir kanal üzerinde sayısal iletimi inceleyeceğiz. Bant sınırlı kanallar pratikte çok kez karşımıza
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
Ayrık-Zaman Sistemler
 Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL HABERLEŞME SİSTEMLERİ TEORİK VE UYGULAMA LABORATUVARI 1.
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL HABERLEŞME SİSTEMLERİ TEORİK VE UYGULAMA LABORATUVARI 1. DENEY GENLİK MODÜLASYONUNUN İNCELENMESİ-1 Arş. Gör. Osman
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL HABERLEŞME SİSTEMLERİ TEORİK VE UYGULAMA LABORATUVARI 1. DENEY GENLİK MODÜLASYONUNUN İNCELENMESİ-1 Arş. Gör. Osman
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
EEM 202 DENEY 9 Ad&Soyad: No: RC DEVRELERİ-II DEĞİŞKEN BİR FREKANSTA RC DEVRELERİ (FİLTRELER)
") EEM 0 DENEY 9 Ad&oyad: R DEVRELERİ-II DEĞİŞKEN BİR FREKANTA R DEVRELERİ (FİLTRELER) 9. Amaçlar Değişken frekansta R devreleri: Kazanç ve faz karakteristikleri Alçak-Geçiren filtre Yüksek-Geçiren filtre
EEM 0 DENEY 9 Ad&oyad: R DEVRELERİ-II DEĞİŞKEN BİR FREKANTA R DEVRELERİ (FİLTRELER) 9. Amaçlar Değişken frekansta R devreleri: Kazanç ve faz karakteristikleri Alçak-Geçiren filtre Yüksek-Geçiren filtre
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
PROSES KONTROL DENEY FÖYÜ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
DENEY 3. Tek Yan Bant Modülasyonu
 DENEY 3 Tek Yan Bant Modülasyonu Tek Yan Bant (TYB) Modülasyonu En basit genlik modülasyonu, geniş taşıyıcılı çift yan bant genlik modülasyonudur. Her iki yan bant da bilgiyi içerdiğinden, tek yan bandı
DENEY 3 Tek Yan Bant Modülasyonu Tek Yan Bant (TYB) Modülasyonu En basit genlik modülasyonu, geniş taşıyıcılı çift yan bant genlik modülasyonudur. Her iki yan bant da bilgiyi içerdiğinden, tek yan bandı
Dijital Kontrol Sistemleri Prof.Dr. Ayhan Özdemir. Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir.
 Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Kontrol Sistemlerinin Analizi
 Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
birim daire üzerindeki z = e jω değerlerinde hesaplanması yöntemiyle bulunabiliri. Ancak, sayısal işaret işlemenin pratik uygulaması, sonsuz bir x(n)
") Bölüm 7 AYRIK-FOURİER DÖNÜŞÜMÜ 14 Bölüm 7. Ayrık-Fourier Dönüşümü 7.1 GİRİŞ Ayrık x(n) dizisinin Fourier dönüşümü, z-dönüşümü X(z) nin birim daire üzerindeki z = e jω değerlerinde hesaplanması yöntemiyle
Bölüm 7 AYRIK-FOURİER DÖNÜŞÜMÜ 14 Bölüm 7. Ayrık-Fourier Dönüşümü 7.1 GİRİŞ Ayrık x(n) dizisinin Fourier dönüşümü, z-dönüşümü X(z) nin birim daire üzerindeki z = e jω değerlerinde hesaplanması yöntemiyle
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İşaretler ve İşaret İşleme
 İşaretler ve İşaret İşleme İşaretler günlük hayatımızda önemli bir rol oynar. Bir işaret zaman, uzaklık, konum, sıcaklık ve basınç gibi bağımsızdeğişkenlerin bir fonksiyonudur. Karşılaştığımızçoğuişaret
İşaretler ve İşaret İşleme İşaretler günlük hayatımızda önemli bir rol oynar. Bir işaret zaman, uzaklık, konum, sıcaklık ve basınç gibi bağımsızdeğişkenlerin bir fonksiyonudur. Karşılaştığımızçoğuişaret
BÖLÜM 2 İKİNCİ DERECEDEN FİLTRELER
 BÖLÜM İKİNİ DEEEDEN FİLTELE. AMAÇ. Filtrelerin karakteristiklerinin anlaşılması.. Aktif filtrelerin avantajlarının anlaşılması.. İntegratör devresi ile ikinci dereceden filtrelerin gerçeklenmesi. TEMEL
BÖLÜM İKİNİ DEEEDEN FİLTELE. AMAÇ. Filtrelerin karakteristiklerinin anlaşılması.. Aktif filtrelerin avantajlarının anlaşılması.. İntegratör devresi ile ikinci dereceden filtrelerin gerçeklenmesi. TEMEL
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP
 DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP Amaç: Bu deneyin amacı, öğrencilerin alternatif akım ve gerilim hakkında bilgi edinmesini sağlamaktır. Deney sonunda öğrencilerin, periyot, frekans, genlik,
DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP Amaç: Bu deneyin amacı, öğrencilerin alternatif akım ve gerilim hakkında bilgi edinmesini sağlamaktır. Deney sonunda öğrencilerin, periyot, frekans, genlik,
OPTIMIZASYON Bir Değişkenli Fonksiyonların Maksimizasyonu...2
 OPTIMIZASYON.... Bir Değişkenli Fonksiyonların Maksimizasyonu.... Türev...3.. Bir noktadaki türevin değeri...4.. Maksimum için Birinci Derece Koşulu...4.3. İkinci Derece Koşulu...5.4. Türev Kuralları...5
OPTIMIZASYON.... Bir Değişkenli Fonksiyonların Maksimizasyonu.... Türev...3.. Bir noktadaki türevin değeri...4.. Maksimum için Birinci Derece Koşulu...4.3. İkinci Derece Koşulu...5.4. Türev Kuralları...5
Op-Amp Uygulama Devreleri
 Op-Amp Uygulama Devreleri Tipik Op-amp devre yapıları şunları içerir: Birim Kazanç Arabelleği (Gerilim İzleyici) Evirici Yükselteç Evirmeyen Yükselteç Toplayan Yükselteç İntegral Alıcı Türev Alıcı Karşılaştırıcı
Op-Amp Uygulama Devreleri Tipik Op-amp devre yapıları şunları içerir: Birim Kazanç Arabelleği (Gerilim İzleyici) Evirici Yükselteç Evirmeyen Yükselteç Toplayan Yükselteç İntegral Alıcı Türev Alıcı Karşılaştırıcı
ELN3052 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - 2 TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI:
 ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri
 Kontrol Sistemleri") Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Çukurova Üniversitesi Biyomedikal Mühendisliği
 Çukurova Üniversitesi Biyomedikal Mühendisliği BMM212 Elektronik-1 Laboratuvarı Deney Föyü Deney#9 Alan Etkili Transistörlü Kuvvetlendiriciler Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015
Çukurova Üniversitesi Biyomedikal Mühendisliği BMM212 Elektronik-1 Laboratuvarı Deney Föyü Deney#9 Alan Etkili Transistörlü Kuvvetlendiriciler Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015
Çukurova Üniversitesi Biyomedikal Mühendisliği
 Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuvarı Deney Föyü Deney#10 Analog Aktif Filtre Tasarımı Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY 10 Analog
Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuvarı Deney Föyü Deney#10 Analog Aktif Filtre Tasarımı Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY 10 Analog
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki olsun. Fonksiyonda meydana gelen artma miktarı
 10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
PID SÜREKLİ KONTROL ORGANI:
 PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
1. LİNEER PCM KODLAMA
 1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
Küçük sinyal analizi transistörü AC domende temsilş etmek için kullanılan modelleri içerir.
 Küçük Sinyal Analizi Küçük sinyal analizi transistörü AC domende temsilş etmek için kullanılan modelleri içerir. 1. Karma (hibrid) model 2. r e model Üretici firmalar bilgi sayfalarında belirli bir çalışma
Küçük Sinyal Analizi Küçük sinyal analizi transistörü AC domende temsilş etmek için kullanılan modelleri içerir. 1. Karma (hibrid) model 2. r e model Üretici firmalar bilgi sayfalarında belirli bir çalışma
ANALOG FİLTRELEME DENEYİ
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG FİLTRELEME DENEYİ Ölçme ve telekomünikasyon tekniğinde sık sık belirli frekans bağımlılıkları olan devreler gereklidir. Genellikle belirli bir frekans bandının
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG FİLTRELEME DENEYİ Ölçme ve telekomünikasyon tekniğinde sık sık belirli frekans bağımlılıkları olan devreler gereklidir. Genellikle belirli bir frekans bandının