Sayısal Kontrol - HAVA HARP OKULU
|
|
|
- Adem Saçan
- 8 yıl önce
- İzleme sayısı:
Transkript

1 Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi / 50

2 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı Kontrol Sistemlerinin Temel Elemanları Ayrık Zamanlı sistemler, Örneklenmiş Veri Sistemleri, Sayısal Sistemler Z dönüşümü Kutup ve Sıfır Kavramları Ayrık Zamanlı Dinamik Sistemlerin Zaman Cevapları Sürekli Zaman- Ayrık Zamanlı Sistemler Arası İlişkiler Ters Z dönüşümü Yöntemleri 2 / 50

3 Sürekli ve Ayrık Kontrol Geri beslemeli kontrol sistemleri çıkış ölçüm bilgisi ile sistemin girişinin modifiye edilmesi konusu ile ilgilenir. Kontrolör bu yapı içersinde çıkış bilgisini alıp değerlendiren ve sistemin girişine uygulayan bloğu oluşturur. Kontrol sistem tasarımı problemi, kontrolör adı verilen bloğu kapalı çevrim sistemi belli bir performansı sağlayacak şekilde tasarlamakla ilgilidir. (Sürekli ve Ayrık) Kapalı çevrim Kontrol Sistemlerinin Kullanım Amaçları: Referans Takibi (Servo Problem) Bozucu Bastırma Problemi Parametre duyarlılığını azaltmak 3 / 50

4 Ayrık Zamanlı Kontrol Sisteminin Genel Yapısı Burada: A/D : bipolar (±5V ), unipolar (0 10V ) Genel çözünürlükler: 8 bit (256 kademe), 12 bit (4096 kademe) 4 / 50
, 12 bit (4096 kademe) 4")
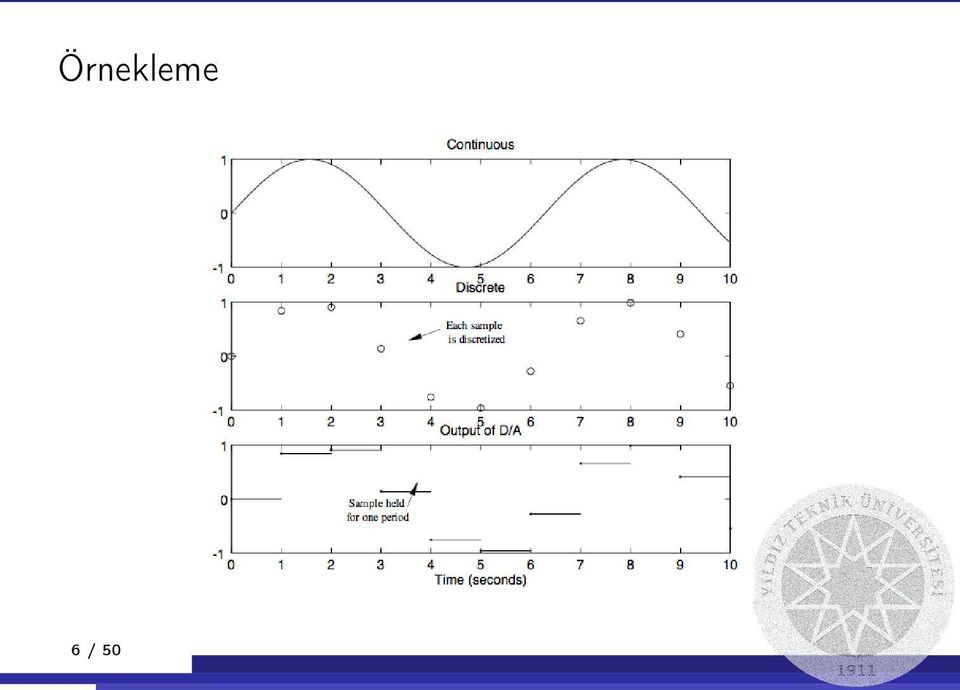
5 Örnek 12 bitlik, ±10V aralığında çalışan bir A/D dönüştürücünün ölçüm hassasiyeti? Cevap q= 20V = 4.88mV 4096 Dikkat edilirse 0 < 4.88mV arasındaki gerilim değişimleri algılanamamaktadır. Bu olaya Quantization (Nicemleme) adı verilir ve doğrusal olmayan bir gürültü meydana getirir. D/A Dönüştürücü Tam sayıyı reel değerli bir gerilime çevirir. Sıfırıncı mertebeden bir tutucudur (İleride göreceğiz) ve A/D dönüştürücü gibi çözünürlüğü vardır. 5 / 50

6 Örnekleme 6 / 50
7 Ayrık Zamanlı Sistem, Örneklenmiş Veri Sistemleri, Sayısal Sistem Nedir? Ayrık Zamanlı Sistem Belli T anlarında anlık alınan veriler ayrık bir dizi oluşturur. Sadece ayrık verilerin bulunduğu sistemlere Ayrık Zamanlı Sistem adı verilir. Örneklenmiş Veri Sistemleri İçinde hem sürekli zaman, hem de ayrık zamanlı işaret barındıran sistemler Sayısal Sistem Örneklenmiş Veri Sistemlerinde quantalama işlemi de yer alıyorsa, bu tür sistemlere Sayısal Sistem adı verilir. 7 / 50

8 T ve q çok çok küçükse... Ayrık Zamanlı İşaretler (Sayısal İşaretler) Sürekli Zaman İşaretlere dönüşür. Bu durumda sürekli zaman yöntemler sayısal yöntemler yerine kullanılabilir. 8 / 50

9 Doğrusal Ayrık Zamanlı Sistemler ve Z Dönüşümü Ayrık sistemlerin en can alıcı parçası zamanın ayrıklaştırılmasıdır. Artık elimizdeki işaretler zamanın fonksiyonu değildir. Elimizde ayrık sayılar mevcuttur. Bu ayrık sayılar örneklemeden dolayı oluşmuş olabilir ya da bir bilgisayar vasıtası ile üretiliyor olabilir. Her iki durumda da sürekli zaman işaretler için kullanılan yöntemler kullanılamaz. Başka Yöntemlere İhtiyacımız Var!!! Z-Dönüşümü S-dönüşümünün sürekli işaretlere yaptığını, Z-dönüşümü ayrık işaretlere yapar. 9 / 50

10 Doğrusal Fark Denklemleri Fiziksel sistemler sürekli zaman diferansiyel denklemler le modellenirler. Sistemin mertebesi, diferansiyel denklemin derecesi ile belirlenir. Ayrık zamanlı sistemler ise fark denklemleri ile ifade edilebilirler. Ayrık bir Kontrolör: T sabit olduğundan, bu ders boyunca x(kt ) yerine x(k) ya da xk notasyonu kullanılacaktır. 10 / 50
 yerine x(k) ya da xk")
11 Kullanılan tüm sistemlerin ve alt sistemlerin nedensel olduğu varsayılırsa uk işareti mevcut ve geçmiş zamanlardaki giriş ve çıkış işaretlerinin fonksiyonu olacaktır: Giriş-Çıkış İşaretleri Girişlerin zaman dizisi: e0, e1, e2,..., ek Çıkışların zaman dizisi: u0, u1, u2,..., uk uk = f (e0, e1, e2,..., ek ; u0, u1, u2,..., uk 1 ) f fonksiyonu doğrusal(lineer) ise uk = a1 uk 1 + a2 uk an uk n + b1 ek bm ek m 11 / 50

12 Örnek (Fibonacci Dizisi) uk = kk 1 + uk 2, k indisi / 50 (u0 = 1, u1 = 1) uk
")
13 Fark Denklemlerinin Çözümü... Gözlem Başlangıç değerleri ve dizilim kuralı verildiğinde, çözüm herhangi bir k için adım adım bulunabilir. Ancak bu yöntem, doğrudan k ıncı andaki çözümü bulmak için uygun değildir. Doğrusal Diferansiyel Denklemlerin Çözümü Çözümün genel olarak s C olacak şekilde u(t) = Ae st yapısında olduğu kabul edilir. Bu ifade DD de yerine yazılır. Çözüm s için bir değer üretir (Genel Çözüm). A katsayısını bulmak için ise başlangıç koşullarından istifade edilir (Özel Çözüm). Örnek x = 5x, x(0) = 1 = x(t) = ae st = ase st = 5ae st = s = 5 = x(t) = ae 5t = a = 1 13 / 50
.")
14 Fark Denklemlerinin Çözümü... Benzer yaklaşım : u(k) = Az k çözümü denenir. Fibonacci örneğimize geri dönecek olursak: Az k = Az k 1 + Az k 2 1 = z 1 + z 2 z 2 z 1 = 0 Karakteristik Denklem z1 = z2 = Bu durumda genel çözüm: u(k) = A1 z1k + A2 z2k A1,2 başlangıç koşullarından kolaylıkla çözülür. 14 / 50
 = A1 z1k + A2 z2k A1,2 başlangıç")
15 Fark Denklemlerinin Çözümü... Gözlem k, z1 modu ile ilintili çözüm sönerken, z2 ile ilintili çözüm genlikçe büyüyecektir. Karakteristik denklemin herhangi bir kökü z > 1 ise, o çözüm k kararsız bir cevap oluşturacak şekilde büyüyecektir. Kararlılık Ayrık zamanlı bir sisteme ait karakteristik denklemin herhangi bir kökü genlikçe > 1 ise (Z düzleminde birim çemberin dışında ise) bu türden sistemlere KARARSIZ sistemler denir. 15 / 50

16 Örnek Sürekli zaman işareti e(t) nin sayısal entegrasyonunu elde etmeye çalışalım. Yani Z t I= e(τ )dτ 0 integralini sadece e0, e1,..., ek 1, ek ölçümlerinden elde etmeye çalışalım: 16 / 50

17 tk tk 1 (ek + ek 1 ) 2 zaman aralıklarının sabit olduğunu düşünürsek A' T = tk tk 1 Bu durumda uk = uk / 50 T (ek + ek 1 ) 2

18 Z Dönüşümü Tanım e0, e1,..., ek,... düzeninde devam eden {e(k)} veya {ek } gibi bir ayrık değişken verildiğinde bu dizinin z dönüşümü E (z) = Z{ek } = X ek z k, z C k=0 şeklinde tanımlanır. Z dönüşümü, ayrık zaman sistemlerde, sürekli zaman sistemlerde Laplace dönüşümünün üstlendiği rolü üstlenir. Burada tanımlanan dönüşüm tek taraflı Z -dönüşümü olarak adlandırılır. 18 / 50

19 Ayrık Transfer Fonksiyonu Sürekli Zaman sistemlerde olduğu gibi Ayrık Zamanlı Sistemler de transfer fonksiyonları ile ifade edilirler. Ayrık İntegrasyon Sistemine geri dönelim: T uk = uk 1 + (ek + ek 1 ) 2 Her iki tarafın Z-dönüşümü alınırsa:! X X X T X k k k k uk z = uk 1 z + ek z + ek 1 z 2 k=0 k=0 k=0 k=0 X X X T = z 1 uj z j + ek z k + z 1 ej z j 2 j= 1 j= 1 k=0 X X X T ek z k + z 1 ej z j = z 1 uj z j / 50 j=0 k=0 j=0

20 Ayrık Transfer Fonksiyonu... T (E (z) + z 1 E (z)) 2 Burada e işareti girişi, u işareti ise çıkışı ifade etmektedir. Transfer fonksiyonu ise: U(z) T z +1 T 1 + z 1 = = E (z) 2 z z 1 U(z) = z 1 U(z) + şeklinde elde edilir. 2 farklı formda yazılabilir. Her iki formunda ayrı ayrı elverişli olduğu durumlar söz konusudur. 20 / 50
 T z +1 T 1 + z 1 = = E (z) 2 z 1 2 1 z 1 U(z) = z 1")
21 Genel Form Genel olarak H(z) transfer fonksiyonu H(z) = U(z) b0 + b1 z 1 + b2 z 2 + bm z m b(z) = = E (z) 1 a1 z 1 a2 z 2 + an z n a(z) şeklindedir. Not Negatif üsteller şeklinde gösterimde paydanın ilk elemanının 1 olması oldukça önemlidir (Göreceğiz). z değişkeni kompleks bir sayı olduğundan H(z) de kompleks bir sayıdır. Bu nedenle H(z) için kutup ve sıfır tanımlamalarını yapabiliriz. 21 / 50
22 Kutup ve Sıfırlar Kutup a(z) = 0 polinom eşitliğini sağlayan z düzlemi noktaları Sıfır b(z) = 0 polinom eşitliğini sağlayan z düzlemi noktaları Not Kutup ve Sıfırların bulunmasında a(z) ve b(z) polinomlarının pozitif üsteller cinsinden gösterimi kullanımı kolaylık sağlar. 22 / 50
23 Birim Geciktirici b1 = 1 ve diğer tüm katsayılar sıfır yapılırsa H(z) = U(z) = z 1 E (z) olarak elde edilir. Yani U(z) = z 1 E (z) Zaman tanım bölgesinde bu eşitliğin eşdeğeri uk = ek 1 şeklindedir. z 1 ifadeleri istenilen sayıda arka arkaya kullanılarak istenilen miktarda gecikme elde edilebilir. 23 / 50
24 Ayrık Zamanlı Sistemlerin blok diyagram Gösterimi Gecikme, Çarpma, Toplama elemanları içeren bir doğrusal ayrık zamanlı fark denklemi blok diyagram (işaret akışı) olarak gösterilebilir: Örnek Trapezoid tipi entegrasyon işlemi uk = uk 1 + blok diyagram gösterimi: 24 / 50 T (ek + ek 1 ) 2
25 Transfer Fonksiyonlarından Fark Denklemlerine Dönüşüm U(z) b0 + b1 z 1 + b2 z 2 + bm z m b(z) = = 1 2 n E (z) 1 a1 z a2 z + an z a(z) Çapraz çarpım yapılırsa: H(z) = U(z) a1 z 1 U(z) a2 z 2 U(z) an z n U(z) = b0 E (z) + b1 z 1 E (z) + b2 z 2 E (z) + + bm z m E (z) uk a1 uk 1 a2 uk 2 an uk n b0 ek + b1 ek 1 + b2 ek bm ek m uk = a1 uk 1 + a2 uk an uk n + b0 ek + b1 ek 1 + b2 ek bm ek m 25 / 50
26 Ayrık Zamanlı Sistemlerin Dinamik Cevapları Bu bölüm z-düzlemi kutup ve sıfırlarının sistem yanıtlarını nasıl etkilediği araştırılacaktır. Kutupların kararlılık üzerindeki etkilerini görmüştük. (Kutuplar birim çemberin içinde sistem kararlı) Sistem yanıtı için akla gelen ilk yöntem 1. Sistemin transfer fonksiyonu H(z) hesaplanır. 2. Sistem giriş işaretinin Z dönüşümü hesaplanır, E (z) 3. U(z) = H(z)E (z) ile çıkış işaretinin z-dönüşümü bulunur. 4. u(k) = Z 1 {U(z)} Not İyi bir yöntem değil. Özellikle ters Z-dönüşümü almak problem 26 / 50
27 3 temel fonksiyon... Birim Basamak Fonksiyon İşaret matematiksel olarak ( 1 k 0 e1 (k) = 0 k<0 E1 (z) = X k=0 27 / 50 1z k = X k=0 1(z 1 )k = 1 z = 1 1 z z 1
28 Üstel İşaret e2 (k) = r k k 0, r R E2 (z) = X k=0 28 / 50 r k z k = X k=0 rz 1 k = 1 z = 1 1 rz z r
29 Üstel İşaret 29 / 50
30 Sönümlü Sinüsoid k e3 (k) = r cos(kθ), k 0 e3 (k) = r k e jkθ + e jkθ e3 (k) = r k e jkθ + r k e jkθ 2 2 r k e jkθ nın Z-dönüşümü E4 (z) = X k=0 r k e jkθ z k = X k=0 re jθ z 1 k = 1 z = jθ 1 1 re z z re jθ Bu fonksiyon r > 1 ise büyür (ıraksar), aksi durumlarda söner (yakınsar). 30 / 50
31 Sönümlü Sinüsoid... r k e jkθ nın Z-dönüşümü E5 (z) = 1 z = jθ 1 1 re z z re jθ E3 (z) = (E4 (z) + E5 (z)) = re jθ z 1 1 re jθ z 1 1 z z z(z r cos θ) E3 (z) = + = 2 jθ jθ 2 z re z 2r cos θz + r 2 z re İşaretin kutupları kompleks ve eşlenik pozisyondadır: p1,2 = re ±jθ = r cos θ ± jr sin θ 31 / 50
32 Örnek r = 0.7, θ = 45 = e(k) = r k cos kθ, π 4 e(0) = 1 sönümlü üstel işaretinin kutup sıfır yerleşimi ile işaretin evrimini inceleyelim: So nu mlu s inu s oid e(k ) k 32 /
33 33 / 50
34 Gözlemler: 1. r > 1 ise cevap ıraksak, r < 1 ise yakınsak, r = 1 ise sönümsüz bir cevap izlenir. 2. Sönümlü sinüsoidin osilasyon hızı (örnek sayısı / çevrim) θ açısı ile belirlenir. Bunu bir örnek ile açıklayalım e(k) = cos kθ olsun. N işaretin periyodu ise e(k) = e(k + N) = cos kθ = cos(k + N)θ = 2π, N Z θ Yani θ büyüdükçe N azalacağı için cevap hızlanır. Nθ = 2π = N = 34 / 50
35 Sürekli Zaman İşaretlerle Ayrık Zamanlı İşaretlerin İlişkileri y (t) = e at cos bt işaretini T ve katları anlarda örneklersek bir yk dizisi üretiriz. y (t) = Y (s) = s +a (s + a)2 + b 2 Sürekli zaman işaretin kutupları: s1,2 = a ± jb. Diğer taraftan yk = y (kt ) = e akt cos bkt Hatırlatma r k cos(kθ) nın kutupları z1,2 = re ±jθ 35 / 50
36 Sürekli Zaman İşaretlerle Ayrık Zamanlı İşaretlerin İlişkileri, z = e st dönüşümü yk nın kutupları: z1,2 = e at e ±jbt = e a+±jb T = e s1,2 T Teorem s sürekli zaman işaretin bir kutbu ise z = e st aynı işaretin T sabit sürelerinde örneklenmiş versiyonunun bit kutbudur. Önemli Not Bu durum sadece kutuplar için geçerlidir. Sıfırlar için geçerli değildir. Bu sonuç kontrol tasarımında önemli kolaylıklar sağlar. 36 / 50
37 s düzleminden z düzlemine / 50
38 s düzleminden z düzlemine... Gözlemler z =1 s=0 s R ve s = 0 7 s = e jωt. z = 1 7 z = 0 s = jω 7 z = s sabit bir sönüm oranına sahipse (siyah noktalı çizgi), z logaritmik bir spiral çizer. Eşleşmelerin hiçbiri tek değildir. Zira: (Birim çember) s2 = s1 + j 2π T noktasını ele alalım. z2 = e s2 T = e s1 T.e 2π = e s1 T = z1 38 / 50
39 s düzleminden z düzlemine... 2 farklı kutup (2 farklı frekanslı işaret) z düzleminde aynı noktaya izdüşerler. Bu olaya aliasing (örtüşme) adı verilir. (Örnek: Hızlı dönen bir araba tekerinin çok yavaş hatta tersine dönüyormuş hissi uyandırması...) s düzleminde s = 0 noktasından başlanarak jω ekseni boyunca π hareket edilirse s = j Tπ noktası z = e j T T = 1 noktasına tekabül eder. frekans daha da arttırılırsa çember saatin aksi yönünde dönmeye devam etmez. Farklı bir katmana geçilir.(z düzlemi Riemann Yüzeyidir) s = j Tπ yatay çizgisi sınırdır ve j Tπ ile s = j Tπ arasındaki bölgeye primer şerit adı verilir. 39 / 50
40 Z-dönüşümünün Özellikleri 1. Z dönüşümü lineer(doğrusal) bir dönüşümdür: Z{a1 y1 (k) + a2 y2 (k)} = a1 Y1 (z) + b1 Y2 (z) 2. Zamanda Öteleme: Z{f (k + n)} = z n F (z) 3. Son değer Teoremi: (Ayrık Zamanlı İşaretin DC ifadesi) (Kararlı bir sistem için geçerlidir) lim f (k) = (z 1) F (z) z=1 k 40 / 50
41 Kararlı bir Transfer Fonksiyonunun DC Kazancı H(z) = Y (z) U(z) verilmiş olsun. Bu sistemin girişine genliği u olan bir basamak fonksiyonu uygulansın. Çıkış: Y (z) = H(z)U(z) = H(z) u z z 1 Son değer teoremi gereğince y = lim y (k) = (z 1) Y (z) z=1 k 41 / 50 u z = (z 1)H(z) = u H(1) z 1 z=1 y = H(1) u
42 Ters Z dönüşümü Yöntemlerin tamamında aynı örneği kullanacağız: Örnek G (s) = 2 s +2 sistemini ele alalım. Sistemin zaman sabiti G (s) = 1 1 s+1 2 ifadesinden τ = 0.5sn olarak hesaplanır. Bu sistemi mevcut üst kesim frekansının 5 katı ile hızla örnekleyelim T = 0.1sn Bu durumda s = 2 noktasındaki kutup z = e = noktasında yansıma yapacaktır. Sistemin DC kazancının 1 olması için (son değer teoreminden) G (z) = şeklinde seçilmelidir. 42 / z
43 Ters Z dönüşümü... Bu sistemin girişine U(z) = uygulanırsa z z 1 şeklinde birim basamak işaret z z = 2 z z 1 z z z 1 = z z 2 Y (z) = H(z)U(z) = Soru: y (k) =? Cevap Ters Z dönüşümü 43 / 50
44 Ters Z dönüşümü Yöntemleri Uzun Bölme F (z) = b(z 1 ) a(z 1 ) verilmiş olsun. f (k) yı bulabilmek için b, a ya bölünür. Bölüm z 1 li terimlerin polinomudur. z 1 li terimlerin katsayıları f (k) dizisini oluşturur. Zahmetli ve yavaş bir yöntemdir. Bu nedenle kullanılmayacaktır. 44 / 50
45 Ters Z dönüşümü Yöntemleri Fark Denklemleri Ayrık Transfer fonksiyonu fark denklemleri halinde yazılır ve belli bir giriş dizisi için denklemler çözülür. Örnek G (z) = z = Y (z) U(z) transfer fonksiyonunu ele alalım: Y (z) z 1 Y (z) = z 1 U(z) yk yk 1 = uk 1 yk = yk uk 1 45 / 50

46 Örnek... Not Bu yöntem bilgisayarla hesaplamaya uygun bir yöntem olup, elle hesaplamaya uygun değildir. Örneğin y (1540) =? 46 / 50
47 Ters Z dönüşümü Yöntemleri Z dönüşümü tablosu kullanmak İfade basit kesirlere ayrıştırılır ve ters Z dönüşümü tablosu ile zaman tanım bölgesine geçilir. Çoğu zaman kısmi kesirlere ayrıştırma problemli olabilmektedir: Örnek z = z (z )(z 1) z z = = (z 1 ) (z 1 ) z 1 z z 1 z Y (z) = z2 = 47 / 50 y (k) = 1(k 1) k
48 Z dönüşümü Tablosu 48 / 50
49 Ters Z dönüşümü Yöntemleri MATLAB BENZETİMİ En kullanışlı yöntemdir. Verilen bir Y (z) ifadesinden y (k) dizisini bulmak için izlenebilecek iki yöntemden bir tanesi verilen giriş için çıkışı benzetimle bulmak; bir diğeri ise sembolik araç kutusunu kullanmaktır. Örnek H(z) = z şeklinde verilmiş olsun. Bu sistemin birim basamak cevabı aşağıdaki komutlar vasıtası ile kolayca hesaplanır: u = num den y = ones(size(0:10)); = [ ]; = [ ]; dlsim(num,den,u) 49 / 50
50 Ters Z dönüşümü Yöntemleri Basamak cevabını bulmak için ayrıca y = dstep(num,den); komutu da kullanılabilir. Bir transfer fonksiyonunun DC kazancı K = ddcgain(num, den) komutu ile bulunabilir. 50 / 50
51 Ters Z dönüşümü Yöntemleri, MATLAB Symbolic Toolbox Z dönüşümü verilmiş bir işaretin ters Z dönüşümü sembolik cebir araç kutusu ile şu şekilde belirlenebilir: Örnek z E (z) = z 2 3z+2 işaretinin ters Z dönüşümünü MATLAB Symbolic Toolbox ile bulmaya çalışalım: z=sym( z ); % sembolik degisken tanimlamasi E=z/(z^2-3*z+2); % fonksiyon iztrans(e) %Ters Z-donusumunun alinmasi Bu komutların icrasını takiben 2^n-1 şeklinde sonuç elde edilir. 51 / 50
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi
 Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 41 Bu bölümde aşağıdaki konular incelenecektir: Nümerik
Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 41 Bu bölümde aşağıdaki konular incelenecektir: Nümerik
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
( ) (0) ( ) (2 )... ( )...
 (0) ( ) (2 )... ( )...") Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
Hatırlanacağı gibi, analog kontrol sistemlerinde tüm sistemler diferansiyel denklemlerle modelleniyordu. Bu diferansiyel denklem Laplace Dönüşümü yoluyla s karmaşık değişkeninin cebirsel bir denklemine
Ayrık-zamanlı sistemlerin analizi z-dönüşümünün kullanılmasıyla basitleşir. Gerçekten de fark-denklemleriyle gösterilen sistem modeli
 Bölüm 3 z-dönüşümü 6 Bölüm 3. z-dönüşümü 3.1 GİRİŞ Ayrık-zamanlı sistemlerin analizi z-dönüşümünün kullanılmasıyla basitleşir. Gerçekten de fark-denklemleriyle gösterilen sistem modeli z-dönüşümü ile üzerindeü-ze-rin-de
Bölüm 3 z-dönüşümü 6 Bölüm 3. z-dönüşümü 3.1 GİRİŞ Ayrık-zamanlı sistemlerin analizi z-dönüşümünün kullanılmasıyla basitleşir. Gerçekten de fark-denklemleriyle gösterilen sistem modeli z-dönüşümü ile üzerindeü-ze-rin-de
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İşaret ve Sistemler. Ders 11: Laplace Dönüşümleri
 İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
İşaret ve Sistemler Ders 11: Laplace Dönüşümleri Laplace Dönüşüm Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) yada L[f(t)] olarak gösterilir. Burada tanımlanan s: İşaret ve Sistemler
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
İkinci Mertebeden Lineer Diferansiyel Denklemler
 A(x)y + B(x)y + C(x)y = F (x) (5) Denklem (5) in sağ tarafında bulunan F (x) fonksiyonu, I aralığı üzerinde sıfıra özdeş ise, (5) denklemine lineer homogen; aksi taktirde lineer homogen olmayan denklem
A(x)y + B(x)y + C(x)y = F (x) (5) Denklem (5) in sağ tarafında bulunan F (x) fonksiyonu, I aralığı üzerinde sıfıra özdeş ise, (5) denklemine lineer homogen; aksi taktirde lineer homogen olmayan denklem
Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında
![Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında](/thumbs/92/109134106.jpg "Transfer Fonksiyonu. Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında") Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
Z DÖNÜŞÜMÜ Transfer Fonksiyonu Dürtü yanıtı h[n] olan sisteme x[n]=z n girişi uygulandığında Burada toplamı n ye bağımlı olmayıp sadece sistemin dürtü yanıtı ve z değerine bağlı bir katsayıdır. şeklinde
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Ayrık-Zaman Sistemler
 Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
Ayrık-Zaman Sistemler Bir ayrık-zaman sistemi, bir giriş dizisi x[n] yi işleyerek daha iyi özelliklere sahip bir çıkış dizisi y[n] oluşturur. Çoğu uygulamalarda ayrık-zaman sistemi bir giriş ve bir çıkıştan
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ
 SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") 1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki olsun. Fonksiyonda meydana gelen artma miktarı
 10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
10.1 Türev Kavramı fonksiyonu için in aralığındaki bütün değerleri için sürekli olsun. in bu aralıktaki bir değerine kadar bir artma verildiğinde varılan x = x 0 + noktasında fonksiyonun değeri olsun.
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
İşaret ve Sistemler. Ders 2: Spektral Analize Giriş
 İşaret ve Sistemler Ders 2: Spektral Analize Giriş Spektral Analiz A 1.Cos (2 f 1 t+ 1 ) ile belirtilen işaret: f 1 Hz frekansında, A 1 genliğinde ve fazı da Cos(2 f 1 t) ye göre 1 olan parametrelere sahiptir.
İşaret ve Sistemler Ders 2: Spektral Analize Giriş Spektral Analiz A 1.Cos (2 f 1 t+ 1 ) ile belirtilen işaret: f 1 Hz frekansında, A 1 genliğinde ve fazı da Cos(2 f 1 t) ye göre 1 olan parametrelere sahiptir.
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
MAK 210 SAYISAL ANALİZ BÖLÜM 2- HATA VE HATA KAYNAKLARI Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ Bir denklemin veya problemin çözümünde kullanılan sayısal yöntem belli bir giriş verisini işleme tabi tutarak sayısal
Sürekli-zaman İşaretlerin Ayrık İşlenmesi
 Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Elektromanyetik Dalga Teorisi
 Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
1. GRUPLAR. c (Birleşme özelliği) sağlanır. 2) a G için a e e a a olacak şekilde e G (e ye birim eleman denir) vardır.
 sağlanır. 2) a G için a e e a a olacak şekilde e G (e ye birim eleman denir) vardır.") 1. GRUPLAR Tanım 1.1. G boş olmayan bir küme ve, G de bir ikili işlem olsun. (G yapısına aşağıdaki aksiyomları sağlıyorsa bir grup denir., ) cebirsel 1) a b cg,, için a( bc) ( ab) c (Birleşme özelliği)
1. GRUPLAR Tanım 1.1. G boş olmayan bir küme ve, G de bir ikili işlem olsun. (G yapısına aşağıdaki aksiyomları sağlıyorsa bir grup denir., ) cebirsel 1) a b cg,, için a( bc) ( ab) c (Birleşme özelliği)
Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı
 Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 72 Bu bölümde aşağıdaki konular incelenecektir: Tasarım Yöntemlerine
Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 72 Bu bölümde aşağıdaki konular incelenecektir: Tasarım Yöntemlerine
f(t)e st dt s > 0 Cebirsel denklem s- tanım bölgesi L 1 Unutulmamalıdır ki, farklı türden tanım ve değer uzayları arasında
e st dt s > 0 Cebirsel denklem s- tanım bölgesi L 1 Unutulmamalıdır ki, farklı türden tanım ve değer uzayları arasında") Bölüm #2 Laplace Dönüşümü F (s) = f(t)e st dt s > şeklinde tanımlanan dönüşüme LAPLACE dönüşümü adı verilir ve kısaca L{f(t)} ile sembolize edilir. Diferansiyel denklemlerin Çözümünde Laplace dönüşümü
Bölüm #2 Laplace Dönüşümü F (s) = f(t)e st dt s > şeklinde tanımlanan dönüşüme LAPLACE dönüşümü adı verilir ve kısaca L{f(t)} ile sembolize edilir. Diferansiyel denklemlerin Çözümünde Laplace dönüşümü
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Örnek...3 : Aşağıdaki ifadelerden hangileri bir dizinin genel terim i olabilir? Örnek...4 : Genel terimi w n. Örnek...1 : Örnek...5 : Genel terimi r n
 DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler değer kümelerine göre adlandırılırlar. Dizinin değer kümesi
DİZİLER Tanım kümesi pozitif tam sayılar kümesi olan her fonksiyona dizi denir. Örneğin f : Z + R, f (n )=n 2 ifadesi bir dizi belirtir. Diziler değer kümelerine göre adlandırılırlar. Dizinin değer kümesi
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A
 T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
T I M U R K A R A Ç AY - H AY D A R E Ş C A L C U L U S S E Ç K I N YAY I N C I L I K A N K A R A Contents Rasyonel Fonksiyonlar 5 Bibliography 35 Inde 39 Rasyonel Fonksiyonlar Polinomlar Yetmez! Bölme
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Dijital Kontrol Sistemleri Prof.Dr. Ayhan Özdemir. Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir.
 Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
Bu ders boyunca, ilk önce sayısal kontrol sistemlerinin temellerini tanıtıp, daha sonra birkaç temel pratik uygulamasından bahsedeceğiz.
 Özellikle 2000 li yıllarda dijital teknolojideki gelişmeler, dijital (sayısal) kontrol sistemlerini analog kontrol sistemleriyle rekabet açısından 90 lı yıllara göre daha üst seviyelere taşımıştır. Düşük
Özellikle 2000 li yıllarda dijital teknolojideki gelişmeler, dijital (sayısal) kontrol sistemlerini analog kontrol sistemleriyle rekabet açısından 90 lı yıllara göre daha üst seviyelere taşımıştır. Düşük
ELEKTROMANYETİK DALGA TEORİSİ DERS - 5
 ELEKTROMANYETİK DALGA TEORİSİ DERS - 5 İletim Hatları İLETİM HATLARI İletim hatlarının tarihsel gelişimi iki iletkenli basit hatlarla (ilk telefon hatlarında olduğu gibi) başlamıştır. Mikrodalga enerjisinin
ELEKTROMANYETİK DALGA TEORİSİ DERS - 5 İletim Hatları İLETİM HATLARI İletim hatlarının tarihsel gelişimi iki iletkenli basit hatlarla (ilk telefon hatlarında olduğu gibi) başlamıştır. Mikrodalga enerjisinin
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
ÜNİTE. MATEMATİK-1 Doç.Dr.Erdal KARADUMAN İÇİNDEKİLER HEDEFLER ÖZDEŞLİKLER, DENKLEMLER VE EŞİTSİZLİKLER
 HEDEFLER İÇİNDEKİLER ÖZDEŞLİKLER, DENKLEMLER VE EŞİTSİZLİKLER Özdeşlikler Birinci Dereceden Bir Bilinmeyenli Denklemler İkinci Dereceden Bir Bilinmeyenli Denklemler Yüksek Dereceden Denklemler Eşitsizlikler
HEDEFLER İÇİNDEKİLER ÖZDEŞLİKLER, DENKLEMLER VE EŞİTSİZLİKLER Özdeşlikler Birinci Dereceden Bir Bilinmeyenli Denklemler İkinci Dereceden Bir Bilinmeyenli Denklemler Yüksek Dereceden Denklemler Eşitsizlikler
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
Bir özvektörün sıfırdan farklı herhangi bri sabitle çarpımı yine bir özvektördür.
 ÖZDEĞER VE ÖZVEKTÖRLER A n n tipinde bir matris olsun. AX = λx (1.1) olmak üzere n 1 tipinde bileşenleri sıfırdan farklı bir X matrisi için λ sayıları için bu denklemi sağlayan bileşenleri sıfırdan farklı
ÖZDEĞER VE ÖZVEKTÖRLER A n n tipinde bir matris olsun. AX = λx (1.1) olmak üzere n 1 tipinde bileşenleri sıfırdan farklı bir X matrisi için λ sayıları için bu denklemi sağlayan bileşenleri sıfırdan farklı
Analog Alçak Geçiren Filtre Karakteristikleri
 Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Deney 5 : Ayrık Filtre Tasarımı. Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç
 İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
ELN3052 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - 2 TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI:
 ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
Sayısal Filtre Tasarımı
 Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
12. SINIF. Ağırlık (%) SAYILAR VE CEBİR ÜSTEL VE LOGARİTMİK FONKSİYONLAR Üstel Fonksiyon 1 8 4
 SAYILAR VE CEBİR ÜSTEL VE LOGARİTMİK FONKSİYONLAR Üstel Fonksiyon 1 8 4") 12. SINIF No Konular Kazanım Sayısı Ders Saati Ağırlık (%) 12.1. ÜSTEL VE LOGARİTMİK FONKSİYONLAR 6 36 17 12.1.1. Üstel Fonksiyon 1 8 4 12.1.2. Logaritma Fonksiyonu 3 18 8 12.1.3 Üstel, Logaritmik Denklemler
12. SINIF No Konular Kazanım Sayısı Ders Saati Ağırlık (%) 12.1. ÜSTEL VE LOGARİTMİK FONKSİYONLAR 6 36 17 12.1.1. Üstel Fonksiyon 1 8 4 12.1.2. Logaritma Fonksiyonu 3 18 8 12.1.3 Üstel, Logaritmik Denklemler
Optimal Kontrol. Durum ve Çıkış Geri-beslemeli Kontrolörlerin DME. 18 Aralık Yıldız Teknik Üniversitesi, Istanbul, Türkiye
 Optimal Kontrol Bölüm 5 Durum ve Çıkış Geri-beslemeli Kontrolörlerin DME Tabanlı Tasarımı Ibrahim Beklan Küçükdemiral Hakan Yazıcı Yıldız Teknik Üniversitesi, Istanbul, Türkiye 18 Aralık 2014 Küçükdemiral,
Optimal Kontrol Bölüm 5 Durum ve Çıkış Geri-beslemeli Kontrolörlerin DME Tabanlı Tasarımı Ibrahim Beklan Küçükdemiral Hakan Yazıcı Yıldız Teknik Üniversitesi, Istanbul, Türkiye 18 Aralık 2014 Küçükdemiral,
13.Konu Reel sayılar
 13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
13.Konu Reel sayılar 1. Temel dizi 2. Temel dizilerde toplama ve çarpma 3. Reel sayılar kümesi 4. Reel sayılar kümesinde toplama ve çarpma 5. Reel sayılar kümesinde sıralama 6. Reel sayılar kümesinin tamlık
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
Kontrol Sistemlerinin Analizi
 Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
Fonksiyonlarda limiti öğrenirken değişkenlerin limitini ve sağdan-soldan limit kavramlarını öğreneceksiniz.
 8.2. Fonksiyonlarda Limit Fonksiyonlarda limiti öğrenirken değişkenlerin limitini ve sağdan-soldan limit kavramlarını öğreneceksiniz. 8.2.1. Değişkenin Limiti Sonsuz sayıda değer alabilen bir x değişkeninin
8.2. Fonksiyonlarda Limit Fonksiyonlarda limiti öğrenirken değişkenlerin limitini ve sağdan-soldan limit kavramlarını öğreneceksiniz. 8.2.1. Değişkenin Limiti Sonsuz sayıda değer alabilen bir x değişkeninin
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Enerji Sistemleri Mühendisliği Bölümü
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
Şekil 1.1 Genliği kuvantalanmamış sürekli zamanlı işaret. İşaretin genliği sürekli değerler alır. Buna analog işaret de denir.
 İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
MAK1010 MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI
 .. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
.. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
ZAMAN SERİLERİNDE REGRESYON ANALİZİ
 ZAMAN SERİLERİNDE REGRESYON ANALİZİ 1 1. GİRİŞ Trent, serinin genelinde yukarıya ya da aşağıya doğru olan hareketlere denmektedir. Bu hareket bazen düz bir doğru şeklinde olmaktadır. Bu tür harekete sahip
ZAMAN SERİLERİNDE REGRESYON ANALİZİ 1 1. GİRİŞ Trent, serinin genelinde yukarıya ya da aşağıya doğru olan hareketlere denmektedir. Bu hareket bazen düz bir doğru şeklinde olmaktadır. Bu tür harekete sahip
ZAMAN VE FREKANS DOMENLERİNDE ÖRNEKLEME
 Bölüm 6 ZAMAN VE FREKANS DOMENLERİNDE ÖRNEKLEME VE ÖRTÜŞME 12 Bölüm 6. Zaman ve Frekans Domenlerinde Örnekleme ve Örtüşme 6.1 GİRİŞ Bu bölümün amacı, verilen bir işaretin zaman veya frekans domenlerinden
Bölüm 6 ZAMAN VE FREKANS DOMENLERİNDE ÖRNEKLEME VE ÖRTÜŞME 12 Bölüm 6. Zaman ve Frekans Domenlerinde Örnekleme ve Örtüşme 6.1 GİRİŞ Bu bölümün amacı, verilen bir işaretin zaman veya frekans domenlerinden
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri
 Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
Elektrik devrelerinde ölçülebilen büyüklükler olan; 5. Elektriksel Büyüklüklerin Ölçülebilen Değerleri Akım Gerilim Devrede bulunan kaynakların tiplerine göre değişik şekillerde olabilir. Zamana bağlı
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ İLETİŞİM LABORATUARI SAYISAL FİLTRELER
 SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
BÖLÜNMÜŞ FARKLAR (DİVİDED DİFFERENCES)
") BÖLÜNMÜŞ FARKLAR (DİVİDED DİFFERENCES) Lagrange ve Neville yöntemlerinin bazı olumsuz yanları vardır: İşlem sayısı çok fazladır (bazı başka yöntemlere kıyasla) Data setinde bir nokta ilavesi veya çıkartılması
BÖLÜNMÜŞ FARKLAR (DİVİDED DİFFERENCES) Lagrange ve Neville yöntemlerinin bazı olumsuz yanları vardır: İşlem sayısı çok fazladır (bazı başka yöntemlere kıyasla) Data setinde bir nokta ilavesi veya çıkartılması
B ol um 5 ANALOG IS ARETLER IN SPEKTRUM ANAL IZ I
 Bölüm 5 ANALOG İŞARETLERİN SPEKTRUM ANALİZİ 10 Bölüm 5. Analog İşaretlerin Spektrum Analizi 5.1 Fourier Serisi Sınırlı (t 1, t 2 ) aralığında tanımlanan f(t) fonksiyonunun sonlu Fourier serisi açılımı
Bölüm 5 ANALOG İŞARETLERİN SPEKTRUM ANALİZİ 10 Bölüm 5. Analog İşaretlerin Spektrum Analizi 5.1 Fourier Serisi Sınırlı (t 1, t 2 ) aralığında tanımlanan f(t) fonksiyonunun sonlu Fourier serisi açılımı
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini