SÖNÜMLÜ SERBEST TİTREŞİMLER
|
|
|
- Altan Tandoğan
- 5 yıl önce
- İzleme sayısı:
Transkript
1 SÖNÜMLÜ SERBEST TİTREŞİMLER 79
2 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80
3 Sönümlü Serbest Titreşim Hareket Denkleminin Bulunması mx + cx + kx = 0 Diferansiyel denklem x + c m x + k m x = 0 δ = c 2m Sönüm sabiti, ω n = k m Doğal frekans x + 2δx + ω 2 n x = 0 x(t) = Ce λt, x (t) = λce λt, x (t) = λ 2 Ce λt Çözüm kabulü Yerlerine konulup düzenlenirse, λ 2 Ce λt + 2δλCe λt + ω 2 n Ce λt = 0 λ 2 + 2δλ + ω 2 n = 0 İkinci dereceden karakteristik denklem 81
4 Bu denklemin kökleri aşağıdaki gibi bulunur. λ 1,2 = δ δ 2 ω n 2 Buna göre, köklü ifadenin değişimine göre 3 farklı titreşim durumu elde edilir. 1. Durum δ 2 ω 2 n > 0 Aşırı Sönüm 2. Durum δ 2 ω 2 n = 0 Kritik Sönüm 3. Durum δ 2 ω 2 n < 0 Zayıf Sönüm 82
5 1. Durum: Aşırı Sönüm δ 2 ω n 2 > 0 c 2 4m 2 > k m c2 > 4mk Aşırı Sönümlü λ 1 = δ + δ 2 2 ω n, λ 2 = δ δ 2 2 ω n Bu durumda diferansiyel denklemin çözümü aşağıdaki gibi bulunur. x(t) = e δt (A cosh μt + B sinh μt) Konum (Aşırı sönüm için) v(t) = e δt (A(μ sinh μt δ cosh μt) + B(μ cosh μt δ sinh μt)) Hız Burada μ aşağıdaki gibidir. μ = δ 2 ω n 2 denilirse A ve B katsayıları başlangıç şartlarından bulunur. 83
6 Başlangıç Şartları ; t = 0 için x(t) = x 0, v(t) = v 0 olduğu kabul edilirse x(0) = x 0 = e δ0 (A cosh μ0 + B sinh μ0) A = x 0 v(0) = v 0 = e δ0 (A(μ sinh μ0 δ cosh μ0) + B(μ cosh μ0 δ sinh μ0)) B = v 0 + δx 0 μ A ve B sabitleri konum denkleminde yerlerine konularak hareket denklemi bulunur. x(t) = e δt (x 0 cosh μt + v 0 + δx 0 μ sinh μt) Aşırı sönüm için 84
7 2. Durum: Kritik Sönüm δ 2 ω n 2 = 0 c 2 4m 2 = k m c2 = 4mk Kritik Sönümlü c = c kr = 2 km = 2mω n Kritik sönüm katsayısı λ 1 = λ 2 = λ = δ Bu durumda diferansiyel denklemin çözümü aşağıdaki gibi bulunur. x(t) = e δt (A + Bt) Konum (Kritik sönüm için) v(t) = e δt (B(1 δt) Aδ) Hız A ve B katsayıları başlangıç şartlarından bulunabilir. Başlangıç şartları ; t = 0 için x(t) = x 0, v(t) = v 0 olduğu kabul edilirse x(0) = x 0 = e δ0 (A + B0) A = x 0 85
8 v(0) = v 0 = e δ0 (B(1 δ0) Aδ) B = v 0 + δx 0 A ve B sabitleri konum denkleminde yerine konularak hareket denklemi elde edilir. x(t) = e δt (x 0 + (v 0 + δx 0 )t) Kritik sönüm için 3. Durum: Zayıf Sönüm δ 2 ω n 2 < 0 c 2 4m 2 < k m c2 < 4mk Zayıf Sönümlü λ 1,2 = δ (ω n 2 δ 2 ) = δ i (ω n 2 δ 2 ) ω d = δ iω d ω d = ω n 2 δ 2 Sönümlü serbest titreşim frekansı 86
9 λ 1 = δ + iω d, λ 2 = δ iω d D = c c kr = c 2 km = δ ω n Sönüm oranı veya sönüm faktörü c kr :Kritik sönüm katsayısı Sönüm tipleri D cinsinden de ifade edilebilir. 1. Durum D > 1 Aşırı Sönüm 2. Durum D = 1 Kritik Sönüm 3. Durum D < 1 Zayıf Sönüm Bu durumda diferansiyel denklemin çözümü aşağıdaki gibi bulunur. x(t) = e δt (A cos ω d t + B sin ω d t) Konum (Zayıf sönüm için) v(t) = e δt ((Bω d Aδ) cos ω d t (Bδ + Aω d ) sin ω d t) Hız 87
10 A ve B katsayıları başlangıç şartlarından bulunabilir. Başlangıç şartları ; t = 0 için x(t) = x 0, v(t) = v 0 olduğu kabul edilirse x(0) = x 0 = e δ0 (A cos ω d 0 + B sin ω d 0) A = x 0 v(0) = v 0 = e δ0 ((Bω d Aδ) cos ω d 0 (Bδ + Aω d ) sin ω d 0) B = v 0 + δx 0 ω d A ve B sabitleri konum denkleminde yerine konularak hareket denklemi elde edilir. x(t) = e δt (x 0 cos ω d t + v 0 + δx 0 ω d sin ω d t) Zayıf sönüm için Bu çözümdeki e δt azalan üstel terimi hariç, kalan kısım periyodiktir ve bu kısımda geçen ω d frekansına sönümlü serbest titreşimlerin frekansı denilmektedir. Buna göre zayıf sönümlü serbest titreşim hareketi, genliği üstel olarak azalan harmonik bir harekettir. 88
11 89
12 Zayıf sönüm için elde edilen hareket denklemi aşağıdaki gibi sadece kosinüs fonksiyonuyla da ifade edilebilir. x(t) = A 0 e δt cos(ω d t ε) x (t) = A 0 e δt [ δ cos(ω d t ε) ω d sin(ω d t ε)] Bu denklem için t = 0 için x(t) = x 0, v(t) = 0 başlangıç şartlarına göre A 0 ve ε aşağıdaki gibidir. A 0 = x 0 cos ε, ε = arctan ( δ ω d ) ε: Faz açısı 90
13 91
14 Logaritmik Azalma Logaritmik azalma, sönümlü serbest titreşimlerde genliklerin azalma hızını ifade eder ve herhangi ardışık iki genlik oranının doğal logaritması şeklinde tanımlanır. x 0 x 1 = x 1 x 2 = = x n 1 x n = e δt d = e c 2π 2m πc ω d = emω d = Λ πc mω Λ = e d sabitine sönme nisbeti denir. Λ = x n 1 x n ln Λ = ln x n 1 x n = ln e πc mω d = πc mω d = λ λ ifadesine logaritmik azalma veya dekreman denir. 92
15 93
16 Örnek 1: Aşağıda denge konumundaki sistemin küçük titreşimler için sönümlü doğal frekansını bulunuz. Çubuk rijit ve kütlesizdir. 94
17 M = Jφ Jφ = cx L kxl ml 2 φ + cl 2 φ + kl 2 φ = 0 mφ + cφ + kφ = 0 ω n = k m, δ = c 2m ω d = ω n 2 δ 2 = k m c2 4m 2 rad sn 95
18 Örnek 2: k eş = k 2 + k 3 + k 4 m Jφ = k b φ kφl 2 rφ l 2 4 ml 2 φ 3 + rl 2 φ 4 + (k b + k eş l 2 )φ = 0 φ + 3r 4m φ + (3k b ml 2 + 3k eş m ) φ = 0 φ + 2δφ + ω n 2 φ = 0 ω n = 3k b ml 2 + 3k eş m, 2δ = 3r 4m δ = 3r 8m ω d = ω 2 n δ 2 = 3k b ml 2 + 3k eş m 9r2 64m 2 rad sn 96
19 Örnek 3: Denge konumundaki sistemin küçük titreşimlerinin sönümlü doğal frekansını bulunuz. Çubuk rijittir. 97
20 Jφ + m 1 x L 2 + m 2x ( 1 12 ML2 + m 1 L 2 L 2 = cx L 2 k 1x L 2 k 2x L m 2 ( 1 3 M + m 1 + m 2 ) φ + cφ + (k 1 + k 2 )φ = 0 L 2 ω n = k 1 + k M + m 1 + m 2, δ = ω d = ω n 2 δ 2 = k 1 + k M + m 1 + m 2 4 L2 ) φ + c 4 φ + (k L k L ) φ = 0 c 2 ( 1 3 M + m 1 + m 2 ) c 2 rad 4 ( M + m sn 1 + m 2 ) 98
21 Örnek 4: Aşağıda denge konumundaki sistemin küçük titreşimlerinin sönüm oranını ve sönümlü doğal frekansını bulunuz. 99
22 J m φ + J M φ = cy (ml ML) m eş L kxl mgx Mgy 2 L 1 φ + c φ + (kl + mg + Mg 4 2 ) φ = 0 c eş k eş ω n = k eş m eş, δ = c eş 2m eş, D = c 2mω n = c eş 2m eş ω n = ω d = ω n 2 δ 2 = k eş m eş c eş 2 k eş m eş c 2 eş 4m eş rad 2 sn 100

23 Örnek 5: Şekilde görülen m kütlesine, denge konumunda uygulanan bir darbe ile bir v0 başlangıç hızı verilmiştir. Zayıf sönüm hali söz konusu olduğuna göre, meydana çıkacak sönümlü titreşimin hareket denklemini belirleyiniz. 101
24 mx + rx + kx = 0 x + 2δx + ω n 2 x = 0 x(t) = e δt (A cos ω d t + B sin ω d t) Zayıf sönüm için titreşim denklemi v(t) = δe δt (A cos ω d t + B sin ω d t) + e δt (Bω d cos ω d t Aω d sin ω d t) t = 0 için x(t) = 0, v(t) = v 0 x(0) = e δ0 (A cos ω d 0 + B sin ω d 0) = 0 A = 0 v(0) = δe δ0 (A cos ω d 0 + B sin ω d 0) + e δ0 (Bω d cos ω d 0 Aω d sin ω d 0) = v 0 δa + Bω d = v 0 B = v 0 ω d x(t) = e δt (A cos ω d t + B sin ω d t) denkleminde yerine konulursa x(t) = v 0 ω d e δt sin ω d t 102
25 Örnek 6: m=0,5 kg lık bir kütlenin denge noktasından itibaren v 0 başlangıç hızıyla serbest titreşiminden elde edilen x-t diyagramı şekilde verilmiştir. x 1 = 28 mm ve x 4 = 1,5 mm olduğuna göre; a. Hangi sönüm hali mevcuttur. b. Sönümlü serbest titreşimin periyodu T d yi ve ait ω d frekansını bulunuz. c. δ sönme sabitini ve r sönüm katsayısını bulunuz. d. Yay katsayısı k değerini bulunuz. e. Başlangıç hızını (v 0 ) bulunuz. 103
26 104
27 a. Zayıf sönüm mevcuttur. b. 4 tam titreşim için t = 4T d = 0,6 sn T d = 0,15 sn ω d = 2π = 2π T d 0,15 = 41,9 rad sn c. Logaritmik dekreman λ = δt d = 1 4 ln λ = 0,729 x(t) x(t + 4T d ) = 1 4 ln x 1 = 1 28 ln x 4 4 1,5 = 1 ln 18,6 4 Sönüm sabiti δ = λ = 0,729 T d 0,15 = 4,86 1 s Sönüm katsayısı r = 2mδ = 2.0, kg s [Ns m ] 105
28 d. ω d = ω n 2 δ 2 ω n 2 = ω d 2 + δ 2 = 41, ω n = 42,18 1 s ω n = k m k = mω 2 n = 0,5.42,18 k = 889,6 kg s 2 [N m ] e. x(t) = v 0 ω d e δt sin ω d t x 1 tepe noktası zamanı : x 1t = T d 4 = 0,15 4 v 0 = x(t)eδt ω d sin ω d t = 0,0375 s = 28. e4,86.0, ,9 sin(41,9.0,0375) = 1,408 m s 106

29 Örnek 7: Şekildeki titreşim sisteminde 34 kg lık m kütlesi, yay katsayısı k=4414,5 N/m olan bir yaya bağlanmıştır. Kütleye bağlanan bir piston da viskoz bir sıvı ile dolu bir amortisörün içinde hareket etmektedir. Sönüm kuvveti doğrudan doğruya kütlenin hızıyla orantılıdır ve hız 1 m/s olduğu zaman 176,6 N dur. a. Sönüm katsayısını, b. Sönümsüz serbest titreşimin doğal frekansını, c. Sönümlü serbest titreşimin doğal frekansını, d. Kritik sönüm değerini, e. Logaritmik azalmayı, f. Başlangıç genliği 5 cm olduğuna göre bir periyot sonundaki genliği bulunuz. 107
30 a. F s = rv r = F s = 176,6 v 1 = 176,6 Ns m b. ω n = k m = 4414,5 34 = 11,39 rad s, f n = ω n = 11,39 2π 2π tit s c. ω d = ω 2 n δ 2 = ( k ( r m 2m )2 ) = ( 4414,5 ( 176, )2 ) ω d = 11,096 rad s f d = ω d 2π = 1,766 tit s d. r c = 2mω n = 2 km = ,5.34 = 774,83 Ns e. Logaritmik dekreman = λ = ln e δt d = δt d = πr mω d = m 176,6π 34.11,096 = 1,469 f. x πr 0 mω = e d x x 1 = x 0 e πr mω d = 0,05. e π.176, ,096 = 1,15 cm 1 108
31 Örnek 8: Toplam kütlesi 500 kg olan yüklü bir platform eşdeğer yay katsayısı 72 kn/m olan bir yay grubu ile bir sönüm elemanı üzerine oturtulmuştur. Platformun denge konumundan itibaren aşağı doğru x=12,5 cm sıkıştırıldıktan sonra ilk hızsız kendi bırakıldığı takdirde, ancak denge konumuna ulaşmaktadır. Sönümün bundan az değeri için titreşim başlamaktadır. Yüklü platformun kendi haline bırakıldıktan t=0,1 s sonraki konumunu ve hızını bulunuz. Çözüm: Sistemde kritik sönüm mevcuttur. Kritik sönüm için çözüm; x = e δt (At + B) x = Ae δt δe δt (At + B) t = 0 için x = 12,5 = 0,125 m, x = 0 e δ.0 (A. 0 + B) = 0,125 B = 0,
32 Ae δ.0 δe δ.0 (A. 0 + B) = 0 A = Bδ δ = r 2m = r c 2m = 2 km 2m = k m = = 12 1 s A = 0, = 1,5 x = e 12t (1,5t + 0,125) t = 0,1 için x = e 12.0,1 (1,5.0,1 + 0,125) = e 1,2 (0,15 + 0,125) = 0,0828 m = 8,28 cm x = Ae δt δe δt (At + B) = 1,5e 12.0,1 12e 12.0,1 (1,5.0,1 + 0,125) x = 0,5423 m s 110
33 ZORLANMIŞ TİTREŞİMLER Zorlayıcı titreşim tipleri: 1. Yön değiştiren bir kuvvet sonucu meydana gelen titreşimler. 2. Hareketli zeminden kaynaklanan titreşimler. 111

34 Hareketin Diferansiyel Denklemi Kuvvetle tahrik edilmiş titreşimler 112
35 mx + rx + kx = F(t) F(t): Zorlayıcı kuvvet Zorlayıcı kuvvet aşağıdaki şekillerde olabilir. F(t) = F 0 e iωt, F(t) = F 0 cos ωt, F(t) = F 0 sin ωt, F(t) = m rω 2 cos ωt F 0 : Zorlayıcı (tahrik) kuvvet genliği ω: Zorlayıcı (tahrik) kuvvet frekansı m rω 2 : Balanssızlık (dengesizlik, merkezkaç) kuvveti genliği m : Dengesizliği oluşturan kütlecik r: Dönme merkezi ile kütlecik (ağırlık merkezi) arasındaki mesafe 113
36 m r = me e = m r m şeklinde bir düzenleme yapılırsa mx + rx + kx = F 0 cos ωt mx + rx + kx = meω 2 cos ωt Sabit genlikli kuvvetle tahrik hali Genliği frekansa bağlı kuvvetle tahrik hali Yay tespit yerinin hareketiyle tahrik edilmiş titreşimler Yay kuvveti F yay = kx r = k(x x p ) Sönüm kuvveti F sönüm = rx r = r(x x p) 114
37 x: Kütlenin mutlak hareketi x p : Platformun (zeminin) hareketi x r : Kütlenin izafi hareketi Zemini hareketli sistemlerde kütlenin mutlak hareketine ait diferansiyel denklem. mx + rx + kx = X p k 2 + r 2 ω 2 cos(ωt + λ) x p = X p cos ωt X p : Platform genliği λ = arctan rω k m kütlesinin platforma göre izafi hareketini gösteren dd. mx r + rx r + kx r = mω 2 X p cos ωt 115
38 Elde edilen 4 adet dd. lineer ve homojen olmayan diferansiyel denklemlerdir. Homojen kısımlarının (denklemlerin sol tarafları) çözümleri sönümlü serbest titreşimlerin hareket denklemlerini vermektedir. Homojen olmayan kısımları (denklemlerin sağ tarafları) özel veya partiküler çözümler olup, iki taraflı homojen olmayan diferansiyel denklemi sağlayan herhangi bir çözümdür. Homojen kısmın çözümü başlangıç şartlarını barındıran A, B (veya faz açısı) sabitlerini içermesine rağmen, partiküler çözüm tamamen belirlidir ve zorlanmış titreşim adını alır. Sistem tahrik kuvvetinin etkisi altında titreşime başladığı zaman, ilk başlarda serbest ve zorlanmış titreşimler birlikte görülmektedir. Bir süre sonra sönümlü serbest titreşimler sönümün etkisiyle ortadan kalkmakta ve sadece zorlanmış titreşimler devam etmektedir. İşte başlangıç anından itibaren bir süre devam ettikten sonra ortadan kaybolan titreşimlere geçici veya tranzient titreşimler denilmektedir. Devam eden titreşimlere ise daimi rejim titreşimleri denir. 116
39 117
40 Sabit genlikli kuvvetle tahrik hali mx + rx + kx = F 0 cos ωt Diferansiyel denklem x h = A 0 e δt cos(ω d t ε) Homojen çözüm x ö = X cos(ωt ψ) Özel çözüm x = x h + x ö x = A 0 e δt cos(ω d t ε) Homejen çözüm + X cos(ωt ψ) Özel Çözüm Toplam çözüm Bir süre sonra sönümlü serbest titreşimler ortadan kalkacağı için, homojen çözüm ihmal edilip sadece özel çözüm göz önüne alınır. x = X cos(ωt ψ) veya x = A cos ωt + B sin ωt 118
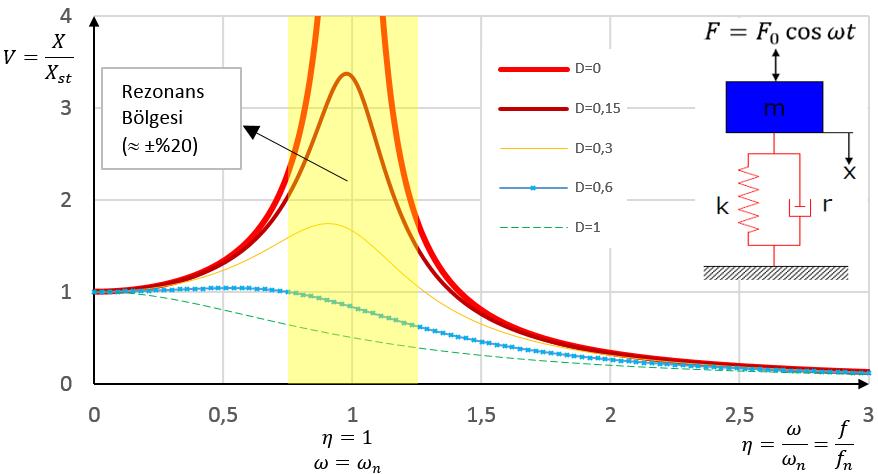
41 Bu çözüm diferansiyel denklemde yerine konularak X ve ψ parametreleri bulunur. X = Burada; F 0 (k mω 2 ) 2 + (rω), tan ψ = rω 2 k mω 2 X st = F 0 k, ω n 2 = k m, η = ω ω n parametreleri kullanılarak zorlayıcı kuvvetin genliği ile statik çökme miktarı oranlanırsa, boyutsuz genlikler oranı bulunur. V = X X st = 1 (1 η 2 ) 2 + 4D 2 η 2, tan ψ = 2Dη 1 η 2 119
42 V ye dinamik büyütme katsayısı denir ve F = F 0 cos ωt ile tahrik edilen zorlanmış titreşimin genliğinin, F = F 0 sabit statik kuvveti altında yayın uzamasına oranını ifade eder. ψ ise, her ikisi de harmonik değişen zorlayıcı kuvvet ile zorlanmış titreşim arasındaki faz açısını gösterir. Zorlayıcı (tahrik) kuvvetin frekansının, sistemin kendi doğal frekansına eşit olduğu zaman, titreşim genliğinin sonsuz olmasına REZONANS hali, ω = ω n frekansına da REZONANS FREKANSI denir. 120
43 121
44 Sonuçlar; Sistemin sönümsüz, yani D = 0 olması halinde, V = 1 (1 η 2 ) 2 + 4D 2 η 2 V = 1 1 η 2 η = 0 için ω = 0 V = 1 η = 1 için ω = ω n V = (Rezonans) η = için ω ω n = V = 0 D ye bağlı olmaksızın bütün eğriler (0,1) noktasından başlar. Tüm eğriler η = 1 civarında maksimuma ulaşır. (Rezonans Bölgesi) Diğer noktalarda sönümün artmasıyla genlikler azalır. 122
45 Genliği frekansa bağlı kuvvetle tahrik hali mx + rx + kx = meω 2 cos ωt Diferansiyel denklem Önceki çözüm adımları aynen takip edilerek çözüm bulunur. X = meω 2 (k mω 2 ) 2 + (rω) 2, tan ψ = rω k mω 2 X genliği e sayısına oranlanarak boyutsuz V büyütme faktörü bulunur. V = X e = η 2 (1 η 2 ) 2 + 4D 2 η = 2 η2 V tan ψ = 2Dη 1 η 2 123
46 Yay tespit yerinin hareketiyle tahrik hali Mutlak hareket mx + rx + kx = X p k 2 + r 2 ω 2 cos(ωt + λ) Diferansiyel denklem λ = arctan rω k X = X p k 2 + r 2 ω 2 (k mω 2 ) 2 + (rω) 2, tan ψ = rω k mω 2 X genliği X p genliğine oranlanarak boyutsuz V büyütme faktörü bulunur V = X X p = 1 + 4D 2 η 2 (1 η 2 ) 2 + 4D 2 η 2 = η2 V tan ψ = 2Dη 1 η 2 124
47 İzafi hareket mx r + rx r + kx r = mω 2 X p cos ωt Diferansiyel denklem x r = X r cos(ωt ψ) V = X r X p = η 2 (1 η 2 ) 2 + 4D 2 η 2 = η2 V tan ψ = 2Dη 1 η 2 Bu titreşim hareketi, genliği frekansa bağlı tahrik kuvveti (balanssızlık-dengesizlik) ile tahrik edilmiş zorlanmış titreşimlerle aynıdır. 125
48 Örnek 1: Kütlesi m=9,81 kg olan bir cisim, yay katsayısı k=10.9,81 N/mm olan bir yay asılmış olup, F=150.9,81.cos 50t değişken kuvvetine maruzdur. Formülde t saniye, kuvvet genliği N olarak verilmiştir. a. Sistemin tabii frekansını bulunuz. b. Hareketin diferansiyel denklemini bulunuz. c. Genel çözümü belirleyiniz. d. t = 0 için x = 0, x = 0 başlangıç şartlarına uyan titreşimi bulunuz. Çözüm : a. ω n = k m = 10.9, ,81 = 100 rad sn 126
49 b. mx + kx = F 9,81x , x = 150.9,81. cos 50t x x = 150 cos 50t dd. c. x = x h + x p Toplam çözüm x h = A cos ω n t + B sin ω n t Homojen çözüm x h = A cos 100t + B sin 100t x p = X p cos ωt Özel çözüm x p = X p cos 50t Özel çözüm diferansiyel denklemde yerine konularak X p genliği bulunur. x p = 50 2 X p cos 50t 50 2 X p cos 50t X p cos 50t = 150 cos 50t 50 2 X p X p =
50 X p = = 0,02 m x = x h + x p = A cos 100t + B sin 100t + 0,02 cos 50t d. t = 0, x = 0 için x(0) = A cos B sin ,02 cos 50.0 = 0 A + 0,02 = 0 A = 0, 02 x = 100A sin 100t + 100B cos 100t 0,02.50 sin 50t t = 0, x = 0 için x (0) = 100A sin B cos ,02.50 sin 50.0 = 0 100B = 0 B = 0 x = 0,02 cos 100t + 0,02 cos 50t x = 0,02(cos 50t cos 100t) 128
51 Örnek 2:Bir motor kütlesi 10 kg olan rijit dikdörtgen bir levha üzerine konulmuştur. Bu levha A kenarı boyunca mafsallı ve B kenarının iki köşesinde ise birer helisel yay üzerine oturmaktadır. Toplam kütlesi 25 kg olan motor 300 dev/dak lık düzgün hızla dönmekte olup, dönme ekseninden 0,05 m uzaklıkta bulunan dengelenmemiş kütlenin ağırlığı 39 N dur. Levhayı taşıyan yayların her birinin yay katsayısı N/m dir. Motordan gelen düşey kuvvetin A dan 0,35 m uzaklıktaki C noktasında tesir ettiği ve yaylara gelen kuvvetlerin eşit olduğu kabul edilerek, a. Sistem titreşimlerinin tabii frekansını bulunuz. b. Zorlanmış titreşime ait diferansiyel denklemi bulunuz. Sadece düşey kuvvetleri göz önüne alınız. 129
52 130
53 Çözüm: a. AB levhasının kütlesi m p = 10 kg Motorun toplam kütlesi Her bir yayın sertliği M A = J toplam φ m m = 25 kg k = N m J toplam φ = 2kL 2 sin φ L 2 ( 1 3 m pab 2 + m m AC 2 ) φ = 2kL 2 2 φ ( , ,35 2 ) φ ,5 2 φ = 0 4,035φ φ = 0 ω n = ,035 = 43,11 rad sn f n = ω n 2π = 43,11 2π = 2,863 Hz 131
54 b. ω = 2πn 60 = 2π = 10π Zorlayıcı kuvvet frekansı Dengesizlikten oluşan merkezkaç kuvveti m rω 2 = 39 9,81 0, π 2 = 196,185 N Merkezkaç kuvvetinin A ya göre moment değişimi M = 196,185.0,35. cos ωt = 68,665 cos 10πt 4,035φ φ = 68,665 cos 10πt φ φ = 17,02 cos 10πt 132
55 Örnek 3:Toplam kütlesi 400 kg olan düşey silindirli bir gaz motoru bir çelik şasiye monte edilmiştir. Motorun ağırlığı 0,0025 m lik düşey statik çökmeye sebep olmaktadır. Motorun dengelenmemiş dönen kütlesi 5 kg olup dönme ekseninden 0,06 m uzaklıktadır. Sönüm elemanının sönüm katsayısı Ns/m dir. Daimi titreşim durumuna erişilmiş olduğuna göre; a. Motor mili 540 dev/dak ile döndüğüne göre zorlanmış titreşimin genliğini b. Rezonansın ortaya çıktığı mil hızını belirleyiniz. 133
56 Çözüm: r = 0,06 m ω = 2πn 60 = 2π m 1 = 5 kg m = 400 kg = 18π rad sn k = mg δ st = 400.9,81 0,0025 = 1, N m r = Ns m F 0 = m 1 ω 2 r = 5. (18π). 0,06 = 959,4 N 134
57 a. mx + rx + kx = 959,4 cos 18πt x = A cos ωt + B sin ωt = A cos 18πt + B sin 18πt x = X cos(18πt ψ) X = X = F 0 (k mω 2 ) 2 + (rω), tan ψ = rω 2 k mω 2 959,4 (1, (18π) 2 ) 2 + ( (18π)) 2 X = 0, m = 0,822 mm b. ω n = k m = 1, = 62,65 rad sn ω = ω n ω n = πn 30 Rezonans durumunda n = 30ω n π = 598,2 dev dak 135
58 Örnek 4: Bir otomobilin kütlesi 1500 kg olan gövdesi, bu gövdenin ağırlığı altında 0,2 şer m kısalan dört eşit amortisör üzerine oturmaktadır. Ayrıca bu amortisörlerden her birinin sönüm katsayısı 150.9,81 Ns/m dir. Otomobil, otomobilin tabii frekansı ile rezonans halinde ve genliği 0,02 m olan harmonik bir hareketle aşağı yukarı hareket eden bir deney platformu üzerine dört tekerlek vasıtası ile yerleştirilmiştir. Gövdenin ağırlık merkezinin, dört tekerin temas noktalarının ağırlık merkezi ile aynı düşey doğrultu üzerinde bulunduğunu kabul ederek, gövdenin genliğini bulunuz. Not: Tekerlekler rijittir. 136

59 Çözüm: k = mg = ,81 δ st 0,20 r = ,81 = 5886 Ns m = N m x p = X p cos ω n t = 0,02 cos ω n t Sönümsüz gövde yay sisteminin tabii frekansı ω n = k = m = 7 rad 1500 sn Platformu hareketli sistemin dd. mx + r(x x p) + k(x x p ) = 0 mx + rx + kx = X p k 2 + r 2 ω 2 cos(ωt + λ) 137
60 η = ω ω n = 1 Sistem rezonans halinde olduğu için ω = ω n dir. r c = 2 km = = 21010,712 D = r r c = ,712 = 0,28 Platformu hareketli sistemin genliği; X = X p k 2 + r 2 ω 2 (k mω 2 ) 2 + (rω) 2 veya X X p = 1 + 4D 2 η 2 (1 η 2 ) 2 + 4D 2 η 2 = , (1 1 2 ) , = 2,05 X = X p. 2,05 = 0,02.2,05 = 0,041 m = 4,1 cm 138
61 Örnek 5: İki tekerlekli bir treyler sinüzoidal yüzeyi haiz bir yol boyunca 20 m/s lik bir hızla hareket ettirilmektedir. Sinüzoidal dalganın dalga boyu 4 m ve tepe ile çukur arasındaki yükseklik farkı 0,05 m dir. Hareketli kütle 1000 kg, toplam yay katsayısı N/m dir. Sistemde kritik sönüm mevcut olduğuna göre, treyler kütlesinin titreşiminin genliğini hesaplayınız. 139
62 Çözüm : x Treylerin yolun orta konumunda statik denge haline göre düşey mutlak hareketi x p = X p cos ωt tekerleklerin orta konumuna göre düşey yer değiştirmesi X p = 0,05 = 0,025 m 2 v = 20 m s, λ = 4m λ = vt t = λ v = 4 20 = 0,2 s ωt = 2π ω = 2π t = 2π 0,2 = 10π rad s D = 1 Kritik sönüm olduğu için 140
63 ω n = k m = = 125 rad sn η = ω ω n = 10π 125 = 2,81 Platformu hareketli sistemin dd. mx + r(x x p) + k(x x p ) = 0 mx + rx + kx = X p k 2 + r 2 ω 2 cos(ωt + λ) Platformu hareketli sistemin genliği; X X p = 1 + 4D 2 η 2 (1 η 2 ) 2 + 4D 2 η 2 = ,81 2 (1 2,81 2 ) ,81 2 = 0,6417 X = 0,6417. X p = 0,6417.0,025 = 0,01604 m = 1,604 cm 141
MEKANİK TİTREŞİMLER DERS NOTLARI
 SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ
 BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
Genel Bilgiler. Giriş Titreşimlerin Sebepleri Titreşimlerin Sonuçları Sistemlerin Titreşim Analizi Titreşim ve İnsan
 Kaynaklar: Makina Dinamiği Yıldız Teknik Üniversitesi Yayını, Prof.Necati Tahralı Prof.Dr.Faris Kaya Y.Doç.Dr.İsmail Yüksek Y.Doç.Dr.Rahmi Güçlü. Mekanik Titreşimler Ders Notları, Prof.Dr.Özgür Turhan.
Kaynaklar: Makina Dinamiği Yıldız Teknik Üniversitesi Yayını, Prof.Necati Tahralı Prof.Dr.Faris Kaya Y.Doç.Dr.İsmail Yüksek Y.Doç.Dr.Rahmi Güçlü. Mekanik Titreşimler Ders Notları, Prof.Dr.Özgür Turhan.
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
T.C. SÜLEYMAN DEMĐREL ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ MAKĐNE MÜHENDĐSLĐĞĐ BÖLÜMÜ
 T.C. SÜLEYMAN DEMĐREL ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ MAKĐNE MÜHENDĐSLĐĞĐ BÖLÜMÜ MAKĐNE TEORĐSĐ VE DĐNAMĐĞĐ LABORATUARI DENEY FÖYÜ DENEY ADI MEKANĐK TĐTREŞĐM DENEYĐ DERSĐN ÖĞRETĐM ÜYESĐ Dr. Öğretim
T.C. SÜLEYMAN DEMĐREL ÜNĐVERSĐTESĐ MÜHENDĐSLĐK FAKÜLTESĐ MAKĐNE MÜHENDĐSLĐĞĐ BÖLÜMÜ MAKĐNE TEORĐSĐ VE DĐNAMĐĞĐ LABORATUARI DENEY FÖYÜ DENEY ADI MEKANĐK TĐTREŞĐM DENEYĐ DERSĐN ÖĞRETĐM ÜYESĐ Dr. Öğretim
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
MEKANĠK TĠTREġĠMLER DENEYĠ
 MK-LB00 MEKNĠK TĠTREġĠMLER DENEYĠ. DENEYĠN MCI Mekanik titreşimler deneyi titreşim teorisi bilgilerinin daha iyi kavranmasına yardımcı olmak ve deneysel beceri kazandırmak amacıyla yapılmaktadır.. DENEY
MK-LB00 MEKNĠK TĠTREġĠMLER DENEYĠ. DENEYĠN MCI Mekanik titreşimler deneyi titreşim teorisi bilgilerinin daha iyi kavranmasına yardımcı olmak ve deneysel beceri kazandırmak amacıyla yapılmaktadır.. DENEY
ELASTİK DALGA YAYINIMI
 ELASTİK DALGA YAYINIMI (016-10. Ders) Prof.Dr. Eşref YALÇINKAYA Geçtiğimiz ders; Cisim dalgaları (P ve S) Tabakalı ortamda yayılan sismik dalgalar Snell kanunu Bu derste; Yüzey dalgaları (Rayleigh ve Love)
ELASTİK DALGA YAYINIMI (016-10. Ders) Prof.Dr. Eşref YALÇINKAYA Geçtiğimiz ders; Cisim dalgaları (P ve S) Tabakalı ortamda yayılan sismik dalgalar Snell kanunu Bu derste; Yüzey dalgaları (Rayleigh ve Love)
Temel bilgiler-flipped Classroom Akslar ve Miller
 Makine Elemanları I Prof. Dr. İrfan KAYMAZ Temel bilgiler-flipped Classroom Akslar ve Miller İçerik Aks ve milin tanımı Akslar ve millerin mukavemet hesabı Millerde titreşim hesabı Mil tasarımı için tavsiyeler
Makine Elemanları I Prof. Dr. İrfan KAYMAZ Temel bilgiler-flipped Classroom Akslar ve Miller İçerik Aks ve milin tanımı Akslar ve millerin mukavemet hesabı Millerde titreşim hesabı Mil tasarımı için tavsiyeler
BASİT HARMONİK HAREKET
 BASİT HARMONİK HAREKET Bir doğru üzerinde bulunan iki nokta arasında periyodik olarak yer değiştirme ve ivmesi değişen hareketlere basit harmonik hareket denir. Sarmal yayın ucuna bağlanmış bir cismin
BASİT HARMONİK HAREKET Bir doğru üzerinde bulunan iki nokta arasında periyodik olarak yer değiştirme ve ivmesi değişen hareketlere basit harmonik hareket denir. Sarmal yayın ucuna bağlanmış bir cismin
MAKİNA TEORİSİ ÖDEV 3. A) Problemlerin Yanıtları
 Problemlerin Yanıtları") MAK3 Makina Teorisi MAKİNA TEORİSİ ÖDEV 3 A) Problemlerin Yanıtları ) Birinci soruda verilen sistem statik denge konumunda kabul edilsin. Buna göre sistem geometrisinden aşağıdaki Şekil elde edilebilir.
MAK3 Makina Teorisi MAKİNA TEORİSİ ÖDEV 3 A) Problemlerin Yanıtları ) Birinci soruda verilen sistem statik denge konumunda kabul edilsin. Buna göre sistem geometrisinden aşağıdaki Şekil elde edilebilir.
MAKİNE ELEMANLARI DERS SLAYTLARI
 MAKİNE ELEMANLARI DERS SLAYTLARI AKSLAR VE MİLLER P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L İ HOĞ LU Dönen parça veya elemanlar taşıyan
MAKİNE ELEMANLARI DERS SLAYTLARI AKSLAR VE MİLLER P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L İ HOĞ LU Dönen parça veya elemanlar taşıyan
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
Makine Elemanları I Prof. Dr. Akgün ALSARAN. Temel bilgiler-flipped Classroom Akslar ve Miller
 Makine Elemanları I Prof. Dr. Akgün ALSARAN Temel bilgiler-flipped Classroom Akslar ve Miller İçerik Giriş Temel kavramlar Sınıflandırma Aks ve mil mukavemet hesabı Millerde titreşim kontrolü Konstrüksiyon
Makine Elemanları I Prof. Dr. Akgün ALSARAN Temel bilgiler-flipped Classroom Akslar ve Miller İçerik Giriş Temel kavramlar Sınıflandırma Aks ve mil mukavemet hesabı Millerde titreşim kontrolü Konstrüksiyon
2. POTANSİYEL VE KİNETİK ENERJİ 2.1. CİSİMLERİN POTANSİYEL ENERJİSİ. Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir.
 BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
Fizik 101: Ders 23 Gündem
 Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. 2) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek.
 Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. 2) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek.") DENEY 4. BASİT SARKAÇ Amaç: 1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. ) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek. Kuramsal Bili: Kendini belirli zaman
DENEY 4. BASİT SARKAÇ Amaç: 1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. ) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek. Kuramsal Bili: Kendini belirli zaman
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 9 COSMOSWORKS İLE ANALİZ
 BİLGİSAYAR DESTEKLİ TASARIM HAFTA 9 COSMOSWORKS İLE ANALİZ Sunum içeriği: 1. Merkezkaç Kuvveti (Centrifugal Force) 2. Burkulma (Flambaj Analizi) 3. Doğal Frekans Analizi (Natural Frequencies) Merkezkaç
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 9 COSMOSWORKS İLE ANALİZ Sunum içeriği: 1. Merkezkaç Kuvveti (Centrifugal Force) 2. Burkulma (Flambaj Analizi) 3. Doğal Frekans Analizi (Natural Frequencies) Merkezkaç
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Akışkanların Dinamiği
 Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
SORULAR. x=l. Şekil-1
 FİZ-217-01-02 Titreşimler ve Dalgalar: Dönem Sonu Sınavı 13 Ocak 2012; Sınav süresi: 150 dakika Adı-Soyadı: No: Şubesi: İmza: Soru Puan 1 18: a=12, b=6 2 18: a=6,b=12 3 18: a=4,b=4,c=4,d=6 4 18: a=4,b=6,c=6,d=2
FİZ-217-01-02 Titreşimler ve Dalgalar: Dönem Sonu Sınavı 13 Ocak 2012; Sınav süresi: 150 dakika Adı-Soyadı: No: Şubesi: İmza: Soru Puan 1 18: a=12, b=6 2 18: a=6,b=12 3 18: a=4,b=4,c=4,d=6 4 18: a=4,b=6,c=6,d=2
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
ELASTİK DALGA YAYINIMI
 18.0.016 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (016-1. DERS 1 Zaman ve Yer Ders saati : 10:0 13:00 Ara : 11:15 11:30 Ders yeri : D-331 1 18.0.016 Sizden beklenen Derse devamın sağlanması çok
18.0.016 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (016-1. DERS 1 Zaman ve Yer Ders saati : 10:0 13:00 Ara : 11:15 11:30 Ders yeri : D-331 1 18.0.016 Sizden beklenen Derse devamın sağlanması çok
Kuvvet. Kuvvet. Newton un 1.hareket yasası Fizik 1, Raymond A. Serway; Robert J. Beichner Editör: Kemal Çolakoğlu, Palme Yayınevi
 Kuvvet izik 1, Raymond A. Serway; Robert J. Beichner Editör: Kemal Çolakoğlu, Palme Yayınevi 2 Kuvvet Kuvvet ivmelenme kazandırır. Kuvvet vektörel bir niceliktir. Kuvvetler çift halinde bulunur. Kuvvet
Kuvvet izik 1, Raymond A. Serway; Robert J. Beichner Editör: Kemal Çolakoğlu, Palme Yayınevi 2 Kuvvet Kuvvet ivmelenme kazandırır. Kuvvet vektörel bir niceliktir. Kuvvetler çift halinde bulunur. Kuvvet
AKM 205-BÖLÜM 2-UYGULAMA SORU VE ÇÖZÜMLERİ
 AKM 205-BÖLÜM 2-UYGULAMA SORU VE ÇÖZÜMLERİ 1 Bir otomobil lastiğinin basıncı, lastik içerisindeki havanın sıcaklığına bağlıdır Hava sıcaklığı 25 C iken etkin basınç 210 kpa dır Eğer lastiğin hacmi 0025
AKM 205-BÖLÜM 2-UYGULAMA SORU VE ÇÖZÜMLERİ 1 Bir otomobil lastiğinin basıncı, lastik içerisindeki havanın sıcaklığına bağlıdır Hava sıcaklığı 25 C iken etkin basınç 210 kpa dır Eğer lastiğin hacmi 0025
ASİSTAN ARŞ. GÖR. GÜL DAYAN
 ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
KKKKK VERİLER. Yer çekimi ivmesi : g=10 m/s 2. Metrik Ön Takılar sin 45 = cos 45 = 0,7
 VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
Fizik 101: Ders 17 Ajanda
 izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
: MAXWELL TEKERLEĞİ. Deneyin Adı Deneyin Amacı
 Deney No Deneyin Adı Deneyin Amacı : M4 : MAXWELL TEKERLEĞİ : İzole sistemlerde enerjinin korunumu ilkesini ve potansiyel ile kinetik enerji arası dönüşümlerini gözlemlemek/türetmek Teorik Bilgi : Maxwell
Deney No Deneyin Adı Deneyin Amacı : M4 : MAXWELL TEKERLEĞİ : İzole sistemlerde enerjinin korunumu ilkesini ve potansiyel ile kinetik enerji arası dönüşümlerini gözlemlemek/türetmek Teorik Bilgi : Maxwell
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
MAK 308 MAKİNA DİNAMİĞİ
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Bu sunum, ders kitabına ek olarak Sayın Prof. Dr. Turgut Tümer in Temel Makina Dinamiği Eğitimi Çalıştayında yaptığı sunumdan yararlanılarak hazırlanmıştır.
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Bu sunum, ders kitabına ek olarak Sayın Prof. Dr. Turgut Tümer in Temel Makina Dinamiği Eğitimi Çalıştayında yaptığı sunumdan yararlanılarak hazırlanmıştır.
ÖN SÖZ... ix BÖLÜM 1: GİRİŞ Kaynaklar...6 BÖLÜM 2: TEMEL KAVRAMLAR... 7
 ÖN SÖZ... ix BÖLÜM 1: GİRİŞ... 1 Kaynaklar...6 BÖLÜM 2: TEMEL KAVRAMLAR... 7 2.1 Periyodik Fonksiyonlar...7 2.2 Kinematik, Newton Kanunları...9 2.3 D Alembert Prensibi...13 2.4 Enerji Metodu...14 BÖLÜM
ÖN SÖZ... ix BÖLÜM 1: GİRİŞ... 1 Kaynaklar...6 BÖLÜM 2: TEMEL KAVRAMLAR... 7 2.1 Periyodik Fonksiyonlar...7 2.2 Kinematik, Newton Kanunları...9 2.3 D Alembert Prensibi...13 2.4 Enerji Metodu...14 BÖLÜM
δ / = P L A E = [+35 kn](0.75 m)(10 ) = mm Sonuç pozitif olduğundan çubuk uzayacak ve A noktası yukarı doğru yer değiştirecektir.
(10 ) = mm Sonuç pozitif olduğundan çubuk uzayacak ve A noktası yukarı doğru yer değiştirecektir.](/thumbs/68/59308868.jpg "δ / = P L A E = [+35 kn](0.75 m)(10 ) = mm Sonuç pozitif olduğundan çubuk uzayacak ve A noktası yukarı doğru yer değiştirecektir.") A-36 malzemeden çelik çubuk, şekil a gösterildiği iki kademeli olarak üretilmiştir. AB ve BC kesitleri sırasıyla A = 600 mm ve A = 1200 mm dir. A serbest ucunun ve B nin C ye göre yer değiştirmesini belirleyiniz.
A-36 malzemeden çelik çubuk, şekil a gösterildiği iki kademeli olarak üretilmiştir. AB ve BC kesitleri sırasıyla A = 600 mm ve A = 1200 mm dir. A serbest ucunun ve B nin C ye göre yer değiştirmesini belirleyiniz.
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
ALTERNATİF AKIMIN DENKLEMİ
 1 ALTERNATİF AKIMIN DENKLEMİ ALTERNATİF AKIM Lineer ve Açısal Hız Lineer ve Açısal Hız Lineer hız v, lineer(doğrusal) yer değişiminin(s) bu sürede geçen zamana oranı olarak tanımlanır. Lineer hızın birimi
1 ALTERNATİF AKIMIN DENKLEMİ ALTERNATİF AKIM Lineer ve Açısal Hız Lineer ve Açısal Hız Lineer hız v, lineer(doğrusal) yer değişiminin(s) bu sürede geçen zamana oranı olarak tanımlanır. Lineer hızın birimi
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
14. SİNÜSOİDAL AKIMDA DİRENÇ, KAPASİTE, İNDÜKTANS VE ORTAK İNDÜKTANSIN ÖLÇÜLMESİ
 14. SİNÜSOİDAL AKIMDA DİRENÇ, KAPASİTE, İNDÜKTANS VE ORTAK İNDÜKTANSIN ÖLÇÜLMESİ Sinüsoidal Akımda Direncin Ölçülmesi Sinüsoidal akımda, direnç üzerindeki gerilim ve akım dalga şekilleri ve fazörleri aşağıdaki
14. SİNÜSOİDAL AKIMDA DİRENÇ, KAPASİTE, İNDÜKTANS VE ORTAK İNDÜKTANSIN ÖLÇÜLMESİ Sinüsoidal Akımda Direncin Ölçülmesi Sinüsoidal akımda, direnç üzerindeki gerilim ve akım dalga şekilleri ve fazörleri aşağıdaki
ITAP Fizik Olimpiyat Okulu 2011 Seçme Sınavı
 ITAP Fizik Olimpiyat Okulu 11 Seçme Sınavı 1. Dikey yönde atılan bir taş hareketin son saniyesinde tüm yolun yarısını geçmektedir. Buna göre taşın uçuş süresinin en fazla olması için taşın zeminden ne
ITAP Fizik Olimpiyat Okulu 11 Seçme Sınavı 1. Dikey yönde atılan bir taş hareketin son saniyesinde tüm yolun yarısını geçmektedir. Buna göre taşın uçuş süresinin en fazla olması için taşın zeminden ne
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Fizik 103 Ders 9 Dönme, Tork Moment, Statik Denge
 Fizik 3 Ders 9 Döne, Tork Moent, Statik Denge Dr. Ali ÖVGÜN DAÜ Fizik Bölüü www.aovgun.co q θ Döne Kineatiği s ( π )r θ nın birii radyan (rad) dır. Bir radyan, yarçapla eşit uzunluktaki bir yay parasının
Fizik 3 Ders 9 Döne, Tork Moent, Statik Denge Dr. Ali ÖVGÜN DAÜ Fizik Bölüü www.aovgun.co q θ Döne Kineatiği s ( π )r θ nın birii radyan (rad) dır. Bir radyan, yarçapla eşit uzunluktaki bir yay parasının
1.Seviye ITAP 24_30_Aralık_2012 Deneme Sınavı Dinamik IX Dönme Dinamiği _Sorular
 1.Seviye ITAP 24_30_Aralık_2012 Deneme Sınavı Dinamik IX Dönme Dinamiği _Sorular 3.26. Yarıçapı R=10cm olan bakırdan yapılmış bir küre ω = 2 tur / s açısal hızı ile kürenin merkezinden geçen bir eksene
1.Seviye ITAP 24_30_Aralık_2012 Deneme Sınavı Dinamik IX Dönme Dinamiği _Sorular 3.26. Yarıçapı R=10cm olan bakırdan yapılmış bir küre ω = 2 tur / s açısal hızı ile kürenin merkezinden geçen bir eksene
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
FİZİK 4. Ders 10: Bir Boyutlu Schrödinger Denklemi
 FİZİK 4 Ders 10: Bir Boyutlu Schrödinger Denklemi Bir Boyutlu Schrödinger Denklemi Beklenen Değer Kuyu İçindeki Parçacık Zamandan Bağımsız Schrödinger Denklemi Kare Kuyu Tünel Olayı Basit Harmonik Salınıcı
FİZİK 4 Ders 10: Bir Boyutlu Schrödinger Denklemi Bir Boyutlu Schrödinger Denklemi Beklenen Değer Kuyu İçindeki Parçacık Zamandan Bağımsız Schrödinger Denklemi Kare Kuyu Tünel Olayı Basit Harmonik Salınıcı
KRİTİK YALITIM YARIÇAPI ve KANATLI YÜZEYLERDEN ISI TRANSFERİ İLE İLGİLİ ÖRNEK PROBLEMLER
 KRİTİK YALITIM YARIÇAPI ve KANATLI YÜZEYLERDEN ISI TRANSFERİ İLE İLGİLİ ÖRNEK PROBLEMLER 1) Çapı 2.2 mm ve uzunluğu 10 m olan bir elektrik teli ısıl iletkenliği k0.15 W/m. o C ve kalınlığı 1 mm olan plastic
KRİTİK YALITIM YARIÇAPI ve KANATLI YÜZEYLERDEN ISI TRANSFERİ İLE İLGİLİ ÖRNEK PROBLEMLER 1) Çapı 2.2 mm ve uzunluğu 10 m olan bir elektrik teli ısıl iletkenliği k0.15 W/m. o C ve kalınlığı 1 mm olan plastic
Şimdi sürtünmesiz yatay düzlemde bir doğru boyunca titreşim hareketi yapan kütle-yay sistemine yakından bakacağız (Şekil-3.1).
.") BÖLÜM-3 3.1 FİZİKSEL SİSTEMLERİN SERBEST SALINIMLARI Bu bölümde periyodik titreşim hareketi yapan fiziksel sistemler incelenecektir. Periyodik titreşim hareketi, denge konumu etrafında eşit zaman aralıklarında
BÖLÜM-3 3.1 FİZİKSEL SİSTEMLERİN SERBEST SALINIMLARI Bu bölümde periyodik titreşim hareketi yapan fiziksel sistemler incelenecektir. Periyodik titreşim hareketi, denge konumu etrafında eşit zaman aralıklarında
Titreşim Deney Düzeneği
 Titreşim Deney Düzeneği DENEY DÜZENEĞI PROJE SÜREÇLERI Kavramsal Tasarım Standart/Ürün Taraması Sistem Planlaması Geliştirme Süreci Test platformunun elektromekanik tasarımı Ölçüm/veri toplama sistemi
Titreşim Deney Düzeneği DENEY DÜZENEĞI PROJE SÜREÇLERI Kavramsal Tasarım Standart/Ürün Taraması Sistem Planlaması Geliştirme Süreci Test platformunun elektromekanik tasarımı Ölçüm/veri toplama sistemi
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
1.Seviye ITAP 17 Aralık_2012 Sınavı Dinamik VIII-Dönme_Sorular
 1.Seviye ITAP 17 Aralık_01 Sınavı Dinamik VIII-Dönme_Sorular 3.1.Dünyanın kendi dönme eksenine göre eylemsiz momentini ve açısal momentumunu bulunuz. 37 33 A) I = 9.7 10 kg m ; L = 7 10 kg m / s 35 31
1.Seviye ITAP 17 Aralık_01 Sınavı Dinamik VIII-Dönme_Sorular 3.1.Dünyanın kendi dönme eksenine göre eylemsiz momentini ve açısal momentumunu bulunuz. 37 33 A) I = 9.7 10 kg m ; L = 7 10 kg m / s 35 31
V = g. t Y = ½ gt 2 V = 2gh. Serbest Düşme NOT:
 Havada serbest bırakılan cisimlerin aşağı doğru düşmesi etrafımızda her zaman gördüğümüz bir olaydır. Bu düşme hareketleri, cisimleri yerin merkezine doğru çeken bir kuvvetin varlığını gösterir. Daha önceki
Havada serbest bırakılan cisimlerin aşağı doğru düşmesi etrafımızda her zaman gördüğümüz bir olaydır. Bu düşme hareketleri, cisimleri yerin merkezine doğru çeken bir kuvvetin varlığını gösterir. Daha önceki
Leyla Yıldırım Bölüm BÖLÜM 2
 BÖLÜM 2 PERİYODİK HAREKETLERİN ÜSTÜSTE GELMESİ Birçok fiziksel durum, aynı sistemde iki veya daha fazla harmonik titreşimin aynı anda uygulanmasını gerektirir. Burada aşağıdaki temel kabule bağlı olarak
BÖLÜM 2 PERİYODİK HAREKETLERİN ÜSTÜSTE GELMESİ Birçok fiziksel durum, aynı sistemde iki veya daha fazla harmonik titreşimin aynı anda uygulanmasını gerektirir. Burada aşağıdaki temel kabule bağlı olarak
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
Süspansiyon elemanları
 Süspansiyon elemanları Çelik yaylar Helisel yaylar, süspansiyon yayı Yaprak yaylar. süspansiyon yayı Burulma Çubukları, stabilizatör, süspansiyon yayı Helisel yay Yaprak yaylar Otomobillerde nadiren kullanılmaktadır.
Süspansiyon elemanları Çelik yaylar Helisel yaylar, süspansiyon yayı Yaprak yaylar. süspansiyon yayı Burulma Çubukları, stabilizatör, süspansiyon yayı Helisel yay Yaprak yaylar Otomobillerde nadiren kullanılmaktadır.
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
MEKANİK TİTREŞİMLER. Doç. Dr. Mehmet İTİK
 MEKANİK TİTREŞİMLER Doç. Dr. Mehmet İTİK Mekanik Titreşimler Ders Planı Ders İçeriği: Titreşim ile ilgili temel kavramlar Mekanik sistemlerin serbest ve zorlanmış titreşimleri. Çok serbestlik dereceli
MEKANİK TİTREŞİMLER Doç. Dr. Mehmet İTİK Mekanik Titreşimler Ders Planı Ders İçeriği: Titreşim ile ilgili temel kavramlar Mekanik sistemlerin serbest ve zorlanmış titreşimleri. Çok serbestlik dereceli
Akışkanların Dinamiği
 Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
Akışkanların Dinamiği Akışkanların Dinamiğinde Kullanılan Temel Prensipler Gaz ve sıvı akımıyla ilgili bütün problemlerin çözümü kütlenin korunumu, enerjinin korunumu ve momentumun korunumu prensibe dayanır.
TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü. Basit Harmonik Hareket Deneyi Deney Föyü. Edirne
 TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü Basit Harmonik Hareket Deneyi Deney Föyü Edirne 2016 İçindekiler: 1.Deney Hakkında Teorik Bilgi 1 1.a) Yaylar ve Mekanik Özellikleri
TRAKYA ÜNİVERSİTESİ Mühendislik Fakültesi / Makine Mühendisliği Bölümü Basit Harmonik Hareket Deneyi Deney Föyü Edirne 2016 İçindekiler: 1.Deney Hakkında Teorik Bilgi 1 1.a) Yaylar ve Mekanik Özellikleri
3/9 54 kg kütleli bir sandık 27 kg kütleli pikup kamyonetin arka kapağında durmaktadır. Şekilde yalnızca biri görülen iki tutucu kablodaki T
 3/9 54 kg kütleli bir sandık 27 kg kütleli pikup kamyonetin arka kapağında durmaktadır. Şekilde yalnızca biri görülen iki tutucu kablodaki T gerginlik kuvvetlerini hesaplayınız. Ağırlık merkezleri G 1
3/9 54 kg kütleli bir sandık 27 kg kütleli pikup kamyonetin arka kapağında durmaktadır. Şekilde yalnızca biri görülen iki tutucu kablodaki T gerginlik kuvvetlerini hesaplayınız. Ağırlık merkezleri G 1
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ: STATİK. Bölüm 1 Temel Kavramlar ve İlkeler
 MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ: STATİK Bölüm 1 Temel Kavramlar ve İlkeler Mekanik Mekanik Rijit-Cisim Mekaniği Şekil değiştiren Cismin Mekaniği Statik Dinamik Dengedeki Cisimler Hareketsiz veya durgun
MÜHENDİSLER İÇİN VEKTÖR MEKANİĞİ: STATİK Bölüm 1 Temel Kavramlar ve İlkeler Mekanik Mekanik Rijit-Cisim Mekaniği Şekil değiştiren Cismin Mekaniği Statik Dinamik Dengedeki Cisimler Hareketsiz veya durgun
MAKİNE ELEMANLARI - II ÖRNEK SORULAR VE ÇÖZÜMLERİ
 MAKİNE ELEMANLARI - II ÖRNEK SORULAR VE ÇÖZÜMLERİ KAYMALI YATAKLAR ÖRNEK: Bir buhar türbininde kullanılan eksenel Michell yatağına gelen toplam yük F=38000 N, n=3540 dev/dk, d=210 mm, D=360 mm, lokma sayısı
MAKİNE ELEMANLARI - II ÖRNEK SORULAR VE ÇÖZÜMLERİ KAYMALI YATAKLAR ÖRNEK: Bir buhar türbininde kullanılan eksenel Michell yatağına gelen toplam yük F=38000 N, n=3540 dev/dk, d=210 mm, D=360 mm, lokma sayısı
5.DENEY. d F. ma m m dt. d y. d y. -kx. Araç. Basit. denge (1) (2) (3) denklemi yazılabilir. (4)
 (2) (3) denklemi yazılabilir. (4)") YAYLI ve BASİ SARKAÇ 5.DENEY. Amaç: i) Bir spiral yayın yay sabitinin belirlenmesi vee basit harmonik hareket yapan bir cisminn periyodununn incelenmesi. ii) Basit sarkaç kullanılarak yerçekimi ivmesininn
YAYLI ve BASİ SARKAÇ 5.DENEY. Amaç: i) Bir spiral yayın yay sabitinin belirlenmesi vee basit harmonik hareket yapan bir cisminn periyodununn incelenmesi. ii) Basit sarkaç kullanılarak yerçekimi ivmesininn
BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ
 1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
EEM 307 Güç Elektroniği
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik-Elektronik Mühendisliği Bölümü Yaz Okulu GENEL SINAV SORULARI VE ÇÖZÜMLERİ EEM 307 Güç Elektroniği Tarih: 30/07/2018 Saat: 18:30-19:45 Yer: Merkezi Derslikler
DİNAMİK DERSİ FİNAL SINAV SORULARI. Adı, Soyadı; İmza: Tarih
 DİNMİK DERSİ FİNL SINV SORULRI dı, Soyadı; İmza: Tarih 12. 06. 2008 Soru / Puan 1/25 Şekil 1 de görülen sistem başlangıçta hareketsizdir.makaraların ağırlığı ve sürtünmesi ihmal edildiğine göre bloğuna
DİNMİK DERSİ FİNL SINV SORULRI dı, Soyadı; İmza: Tarih 12. 06. 2008 Soru / Puan 1/25 Şekil 1 de görülen sistem başlangıçta hareketsizdir.makaraların ağırlığı ve sürtünmesi ihmal edildiğine göre bloğuna
EMAT ÇALIŞMA SORULARI
 EMAT ÇALIŞMA SORULARI 1) A = 4. ı x 2. ı y ı z ve B = ı x + 4. ı y 4. ı z vektörlerinin dik olduğunu gösteriniz. İki vektörün skaler çarpımlarının sıfır olması gerekir. A. B = 4.1 + ( 2). 4 + ( 1). ( 4)
EMAT ÇALIŞMA SORULARI 1) A = 4. ı x 2. ı y ı z ve B = ı x + 4. ı y 4. ı z vektörlerinin dik olduğunu gösteriniz. İki vektörün skaler çarpımlarının sıfır olması gerekir. A. B = 4.1 + ( 2). 4 + ( 1). ( 4)
Fizik 101: Ders 7 Ajanda
 Fizik 101: Ders 7 Ajanda Sürtünme edir? asıl nitelendirebiliriz? Sürtünme modeli Statik & Kinetik sürtünme Sürtünmeli problemler Sürtünme ne yapar? Yeni Konu: Sürtünme Rölatif harekete karşıdır. Öğrendiklerimiz
Fizik 101: Ders 7 Ajanda Sürtünme edir? asıl nitelendirebiliriz? Sürtünme modeli Statik & Kinetik sürtünme Sürtünmeli problemler Sürtünme ne yapar? Yeni Konu: Sürtünme Rölatif harekete karşıdır. Öğrendiklerimiz
TEKNOLOJİNİN BİLİMSEL İLKELERİ. Öğr. Gör. Adem ÇALIŞKAN
 TEKNOLOJİNİN BİLİMSEL İLKELERİ 3 Malzemelerin esnekliği Gerilme Bir cisme uygulanan kuvvetin, kesit alanına bölümüdür. Kuvvetin yüzeye dik olması halindeki gerilme "normal gerilme" adını alır ve şeklinde
TEKNOLOJİNİN BİLİMSEL İLKELERİ 3 Malzemelerin esnekliği Gerilme Bir cisme uygulanan kuvvetin, kesit alanına bölümüdür. Kuvvetin yüzeye dik olması halindeki gerilme "normal gerilme" adını alır ve şeklinde
Bölüm 3 AC Devreler. 1. AC devrede, seri RC ağının karakteristiklerini anlamak. 2. Kapasitif reaktans, empedans ve faz açısı kavramlarını anlamak.
 Bölüm 3 AC Devreler DENEY 3-1 AC RC Devresi DENEYİN AMACI 1. AC devrede, seri RC ağının karakteristiklerini anlamak. 2. Kapasitif reaktans, empedans ve faz açısı kavramlarını anlamak. GENEL BİLGİLER Saf
Bölüm 3 AC Devreler DENEY 3-1 AC RC Devresi DENEYİN AMACI 1. AC devrede, seri RC ağının karakteristiklerini anlamak. 2. Kapasitif reaktans, empedans ve faz açısı kavramlarını anlamak. GENEL BİLGİLER Saf
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
MKM 308 Makina Dinamiği
 MKM 308 Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü E k E k = Q k n: Serbestlik Derecesi Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü k = 1,, 3,.., n E k
MKM 308 Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü E k E k = Q k n: Serbestlik Derecesi Lagrange Denklemleri Mühenislik Fakültesi Makine Mühenisliği Bölümü k = 1,, 3,.., n E k
MAKİNE ELEMANLARI 1 GENEL ÇALIŞMA SORULARI 1) Verilen kuvvet değerlerini yükleme türlerini yazınız.
 Verilen kuvvet değerlerini yükleme türlerini yazınız.") MAKİNE ELEMANLARI 1 GENEL ÇALIŞMA SORULARI 1) Verilen kuvvet değerlerini yükleme türlerini yazınız. F = 2000 ± 1900 N F = ± 160 N F = 150 ± 150 N F = 100 ± 90 N F = ± 50 N F = 16,16 N F = 333,33 N F =
MAKİNE ELEMANLARI 1 GENEL ÇALIŞMA SORULARI 1) Verilen kuvvet değerlerini yükleme türlerini yazınız. F = 2000 ± 1900 N F = ± 160 N F = 150 ± 150 N F = 100 ± 90 N F = ± 50 N F = 16,16 N F = 333,33 N F =
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
DİNAMİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
Sistem Dinamiği. Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Diferansiyel denklemler uygulama soruları
 . Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
. Aşağıdaki diferansiyel denklemleri sınıflandırınız. a) d y d d + y = 0 b) 5 d dt + 4d + 9 = cos 3t dt Diferansiyel denklemler uygulama soruları 0.0.3 c) u + u [ ) ] d) y + = c d. y + 3 = 0 denkleminin,
FİZ217 TİTREŞİMLER VE DALGALAR DERSİNİN 2. ARA SINAV SORU CEVAPLARI
 1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
1) Gerilmiş bir ipte enine titreşimler denklemi ile tanımlıdır. Değişkenlerine ayırma yöntemiyle çözüm yapıldığında için [ ] [ ] ifadesi verilmiştir. 1.a) İpin enine titreşimlerinin n.ci modunu tanımlayan
Fizik 101: Ders 6 Ajanda. Tekrar Problem problem problem!! ivme ölçer Eğik düzlem Dairesel hareket
 Fizik 101: Ders 6 Ajanda Tekrar Problem problem problem!! ivme ölçer Eğik düzlem Dairesel hareket Özet Dinamik. Newton un 3. yasası Serbest cisim diyagramları Problem çözmek için sahip olduğumuz gereçler:
Fizik 101: Ders 6 Ajanda Tekrar Problem problem problem!! ivme ölçer Eğik düzlem Dairesel hareket Özet Dinamik. Newton un 3. yasası Serbest cisim diyagramları Problem çözmek için sahip olduğumuz gereçler:
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
YAPI ZEMİN ETKİLEŞİMİ. Yrd. Doç. Dr Mehmet Alpaslan KÖROĞLU
 YAPI ZEMİN ETKİLEŞİMİ Yrd. Doç. Dr Mehmet Alpaslan KÖROĞLU Serbest Titreşim Dinamik yüklemenin pek çok çeşidi, zeminlerde ve yapılarda titreşimli hareket oluşturabilir. Zeminlerin ve yapıların dinamik
YAPI ZEMİN ETKİLEŞİMİ Yrd. Doç. Dr Mehmet Alpaslan KÖROĞLU Serbest Titreşim Dinamik yüklemenin pek çok çeşidi, zeminlerde ve yapılarda titreşimli hareket oluşturabilir. Zeminlerin ve yapıların dinamik
HİDROLİK. Yrd. Doç. Dr. Fatih TOSUNOĞLU
 HİDROLİK Yrd. Doç. Dr. Fatih TOSUNOĞLU Ders Hakkında Genel Bilgiler Görüşme Saatleri:---------- Tavsiye edilen kitaplar: 1-Hidrolik (Prof. Dr. B. Mutlu SÜMER, Prof. Dr. İstemi ÜNSAL. ) 2-Akışkanlar Mekaniği
HİDROLİK Yrd. Doç. Dr. Fatih TOSUNOĞLU Ders Hakkında Genel Bilgiler Görüşme Saatleri:---------- Tavsiye edilen kitaplar: 1-Hidrolik (Prof. Dr. B. Mutlu SÜMER, Prof. Dr. İstemi ÜNSAL. ) 2-Akışkanlar Mekaniği
B ol um 5 ANALOG IS ARETLER IN SPEKTRUM ANAL IZ I
 Bölüm 5 ANALOG İŞARETLERİN SPEKTRUM ANALİZİ 10 Bölüm 5. Analog İşaretlerin Spektrum Analizi 5.1 Fourier Serisi Sınırlı (t 1, t 2 ) aralığında tanımlanan f(t) fonksiyonunun sonlu Fourier serisi açılımı
Bölüm 5 ANALOG İŞARETLERİN SPEKTRUM ANALİZİ 10 Bölüm 5. Analog İşaretlerin Spektrum Analizi 5.1 Fourier Serisi Sınırlı (t 1, t 2 ) aralığında tanımlanan f(t) fonksiyonunun sonlu Fourier serisi açılımı
ATALET MOMENTİ. Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması.
 ATALET MOMENTİ Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması. UYGULAMALAR Şekilde gösterilen çark büyük bir kesiciye bağlıdır. Çarkın kütlesi, kesici bıçağa
ATALET MOMENTİ Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması. UYGULAMALAR Şekilde gösterilen çark büyük bir kesiciye bağlıdır. Çarkın kütlesi, kesici bıçağa
DİNAMİK. Merkezcil Kuvvet Kütle Çekimi. Konu Başlıkları Serbest Cisim Diyagramı Newton un Hareket Kanunları. Sürtünme Kuvveti
 DİNAMİK Konu Başlıkları Serbest Cisim Diyagramı Newton un Hareket Kanunları Eylemsizlik Temel Kanun Etki-Tepki Sürtünme Kuvveti Merkezcil Kuvvet Kütle Çekimi Serbest Cisim Diyagramı Bir cisme etki eden
DİNAMİK Konu Başlıkları Serbest Cisim Diyagramı Newton un Hareket Kanunları Eylemsizlik Temel Kanun Etki-Tepki Sürtünme Kuvveti Merkezcil Kuvvet Kütle Çekimi Serbest Cisim Diyagramı Bir cisme etki eden
BURSA TECHNICAL UNIVERSITY (BTU) Department of Mechanical Engineering
 Department of Mechanical Engineering") Uygulama Sorusu-1 Şekildeki 40 mm çaplı şaft 0 kn eksenel çekme kuvveti ve 450 Nm burulma momentine maruzdur. Ayrıca milin her iki ucunda 360 Nm lik eğilme momenti etki etmektedir. Mil malzemesi için σ
Uygulama Sorusu-1 Şekildeki 40 mm çaplı şaft 0 kn eksenel çekme kuvveti ve 450 Nm burulma momentine maruzdur. Ayrıca milin her iki ucunda 360 Nm lik eğilme momenti etki etmektedir. Mil malzemesi için σ
TAŞINIMIN FİZİKSEL MEKANİZMASI
 BÖLÜM 6 TAŞINIMIN FİZİKSEL MEKANİZMASI 2 or Taşınımla ısı transfer hızı sıcaklık farkıyla orantılı olduğu gözlenmiştir ve bu Newton un soğuma yasasıyla ifade edilir. Taşınımla ısı transferi dinamik viskosite
BÖLÜM 6 TAŞINIMIN FİZİKSEL MEKANİZMASI 2 or Taşınımla ısı transfer hızı sıcaklık farkıyla orantılı olduğu gözlenmiştir ve bu Newton un soğuma yasasıyla ifade edilir. Taşınımla ısı transferi dinamik viskosite
DENEY 2 Sistem Benzetimi
 DENEY Sistem Benzetimi DENEYİN AMACI. Diferansiyel denklem kullanarak, fiziksel bir sistemin nasıl tanımlanacağını öğrenmek.. Fiziksel sistemlerin karakteristiklerini anlamak amacıyla diferansiyel denklem
DENEY Sistem Benzetimi DENEYİN AMACI. Diferansiyel denklem kullanarak, fiziksel bir sistemin nasıl tanımlanacağını öğrenmek.. Fiziksel sistemlerin karakteristiklerini anlamak amacıyla diferansiyel denklem
BÖLÜM SÖNÜMLÜ OLMAYAN ZORLAMALI SALINIM HAREKETİ
 BÖLÜM-4 4.1 ZORLAMALI SALINIMLAR ve REZONANS Önceki bölümde sönümsüz ve sönümlü serbest salınım hareketi yapan değişik sistemleri inceledik. Şimdi salınım yapan mekanik sisteme periyodik değişen bir dış
BÖLÜM-4 4.1 ZORLAMALI SALINIMLAR ve REZONANS Önceki bölümde sönümsüz ve sönümlü serbest salınım hareketi yapan değişik sistemleri inceledik. Şimdi salınım yapan mekanik sisteme periyodik değişen bir dış
8. ALTERNATİF AKIM VE SERİ RLC DEVRESİ
 8. ATENATİF AKIM E SEİ DEESİ AMAÇA 1. Alternatif akım ve gerilim ölçmeyi öğrenmek. Direnç, kondansatör ve indüktans oluşan seri bir alternatif akım devresini analiz etmek AAÇA oltmetre, ampermetre, kondansatör
8. ATENATİF AKIM E SEİ DEESİ AMAÇA 1. Alternatif akım ve gerilim ölçmeyi öğrenmek. Direnç, kondansatör ve indüktans oluşan seri bir alternatif akım devresini analiz etmek AAÇA oltmetre, ampermetre, kondansatör
AKM 205 BÖLÜM 2 - UYGULAMA SORU VE ÇÖZÜMLERİ. Doç.Dr. Ali Can Takinacı Ar.Gör. Yük. Müh. Murat Özbulut
 AKM 205 BÖLÜM 2 - UYGULAMA SORU VE ÇÖZÜMLERİ Doç.Dr. Ali Can Takinacı Ar.Gör. Yük. Müh. Murat Özbulut 1. Bir otomobile lastiğinin basıncı, lastik içerisindeki havanın sıcaklığına bağlıdır. Hava sıcaklığı
AKM 205 BÖLÜM 2 - UYGULAMA SORU VE ÇÖZÜMLERİ Doç.Dr. Ali Can Takinacı Ar.Gör. Yük. Müh. Murat Özbulut 1. Bir otomobile lastiğinin basıncı, lastik içerisindeki havanın sıcaklığına bağlıdır. Hava sıcaklığı
Toplam
 Gerçek basittir ama basit görülmez. Blaise Pascal Ad Soyad: Okul: 1 2 3 4 5 6 7 8 9 10 Toplam /6 /7 /12 /10 /11 /8 /10 /12 /10 /14 /100 SINAV KURALLARI 1) Sınav toplam 5 sayfadan oluşmaktadır, lütfen sınava
Gerçek basittir ama basit görülmez. Blaise Pascal Ad Soyad: Okul: 1 2 3 4 5 6 7 8 9 10 Toplam /6 /7 /12 /10 /11 /8 /10 /12 /10 /14 /100 SINAV KURALLARI 1) Sınav toplam 5 sayfadan oluşmaktadır, lütfen sınava
A A A A A A A A A A A
 S 2 FİZİ TESTİ. Bu testte 0 soru vardır. 2. Cevaplarınızı, cevap kâğıdının Fizik Testi için ayrılan kısmına işaretleyiniz.. Aşağıdakilerden hangisi momentum birimidir? joule joule A) B) newton saniye weber
S 2 FİZİ TESTİ. Bu testte 0 soru vardır. 2. Cevaplarınızı, cevap kâğıdının Fizik Testi için ayrılan kısmına işaretleyiniz.. Aşağıdakilerden hangisi momentum birimidir? joule joule A) B) newton saniye weber
ALTERNATİF AKIMIN DENKLEMİ
 1 ALTERNATİF AKIMIN DENKLEMİ Ani ve Maksimum Değerler Alternatif akımın elde edilişi incelendiğinde iletkenin 90 ve 270 lik dönme hareketinin sonunda maksimum emk nın indüklendiği görülür. Alternatif akımın
1 ALTERNATİF AKIMIN DENKLEMİ Ani ve Maksimum Değerler Alternatif akımın elde edilişi incelendiğinde iletkenin 90 ve 270 lik dönme hareketinin sonunda maksimum emk nın indüklendiği görülür. Alternatif akımın