TÜM GÖKYÜZÜ KAMERASINDAN ALINAN GÖRÜNTÜLER KULLANILARAK BULUTLULUK ÖLÇÜMÜ YAPILMASI
|
|
|
- Su Sanaz Yerlikaya
- 8 yıl önce
- İzleme sayısı:
Transkript

1 TÜM GÖKYÜZÜ KAMERASINDAN ALINAN GÖRÜNTÜLER KULLANILARAK BULUTLULUK ÖLÇÜMÜ YAPILMASI İsmail BAŞLAR UZMANLIK TEZİ TÜRKİYE BİLİMSEL VE TEKNOLOJİK ARAŞTIRMA KURUMU Ulusal Gözlemevi Müdürlüğü Ocak 2012 ANTALYA

2 ÖNSÖZ VE TEŞEKKÜR Çalışma süresince katkı ve desteğinden dolayı Dr. Tuncay Özışık'a teşekkürlerimi sunarım. Ayrıca çalışma arkadaşlarıma ve TUG yönetimine göstermiş olduğu anlayıştan dolayı teşekkürü borç bilirim. i

3 TÜM GÖKYÜZÜ KAMERASINDAN ALINAN GÖRÜNTÜLER KULLANILARAK BULUTLULUK ÖLÇÜMÜ YAPILMASI (Uzmanlık Tezi) İsmail BAŞLAR ÖZET Gökyüzündeki bulutluluğun tespiti, faaliyette olan gözlemevlerinde ve gözlemevi yer seçimi çalışmalarında büyük önem taşımaktadır. Günümüze kadar bulutluluğun tespiti için farklı yöntemler kullanılmıştır. Günümüzde ise kameraların da gelişimiyle, bulutluluk ölçümlerinde tüm gökyüzü kamerası kullanılması önemli yer tutmaktadır. Bu çalışmada TÜBİTAK Ulusal Gözlemevi Bakırlıtepe Yerleşkesi nde kullanılmakta olan tüm gökyüzü kamerasından alınan görüntüler ile bulutluluk analizi yapan bir sistem üzerinde çalışılmıştır. Amaç, alınan görüntüleri görüntü işleme tekniklerini uygulayarak analiz etmek ve bulutluluk oranını hesaplamaktır. Gündüz ve gece olmak üzere iki farklı zaman dilimindeki görüntüler kendi arasında, bulundukları zaman dilimine göre ayrılarak farklı metotlarla analiz edilmiştir. Görüntülerin tek bir yöntem yerine sınıflara ayrılarak farklı metotlarla incelenmesi halinde başarı oranının yükseldiği görülmüştür. Anahtar Kelimeler: Görüntü işleme, bulutluluk analizi, tüm gökyüzü kamerası, renk uzayı ii

4 CLOUDINESS ANALYSIS BY USING ALL SKY CAMERA IMAGES (Expertise thesis) İsmail BAŞLAR ABSTRACT Cloud detection is an important subject for both observatories already operating and site selection for an observatory. There are some methods used for cloud detection until now. Nowadays cloud detection using all sky cameras is the most promising method by the help of sophisticated cameras. In this work we studied automatic cloudiness analysis system by using the images taken by all sky camera located at TÜBİTAK National Observatory. Different approaches applied to both day time and night time images to calculate the sky coverage. Image classification methods are improved for applying the suitable image processing method. We discovered that classifying images to classes and applying different methods according to their classes increases performance of cloud detection system. Keywords: Image processing, cloudiness, sky coverage analysis, all sky camera iii

5 İÇİNDEKİLER ÖNSÖZ VE TEŞEKKÜR... i ÖZET... ii ABSTRACT... iii İÇİNDEKİLER... iv TABLO LİSTESİ... vi ŞEKİL LİSTESİ... vii SİMGE VE KISALTMALAR... ix 1. GİRİŞ ÖLÇME DÜZENEĞİ GÖRÜNTÜ ANALİZ YÖNTEMLERİ Renk Uzayları RGB renk uzayı HSV renk uzayı Lab renk uzayı CIE XYZ renk uzayı Dönüşümler RGB renk uzayından HSV renk uzayına dönüşüm RGB renk uzayından Lab renk uzayına dönüşüm RGB renk uzayından XYZ renk uzayına dönüşüm XYZ renk uzayından Lab renk uzayına dönüşüm Çalışma Alanı (maskeleme) Bağlantılı Bileşen Etiketleme Yöntemi Morfolojik İşlemler Genleşme işlemi...17 iv
...14 3.4. Bağlantılı Bileşen Etiketleme Yöntemi...15 3.5 Morfolojik İşlemler...16 3.5.1. Genleşme işlemi...17 iv")
6 Aşınma işlemi Açınım işlemi Kapanım işlemi Yapılandırma elemanı Gri seviyede morfolojik işlemler K-means Yöntemi K-means yönteminin adımları Otsu Metodu Varyans Otsu metodu ve algoritması UYGULAMA VE SONUÇLAR Gündüz Alınan Görüntülerde Bulutluluk Analizi Güneş'in tespiti K-means kümeleme yöntemi ile bulutluluk tespiti RGB uzayı kullanılarak bulut tespiti İki yöntemden uygun olanın seçilmesi Gece Alınan Görüntülerde Bulutluluk Analizi Karanlık gecede bulutluluk analizi Aydınlık gecede bulutluluk analizi Ay'ın tespiti K-means kümeleme yöntemi ile bulutluluk tespiti Gece alınan görüntülerde uygun yöntemin seçilmesi Bulutluluk Oranı Hesabı TARTIŞMA VE ÖNERİLER...40 KAYNAKLAR...44 EKLER...47 IDL kodları...47 ÖZGEÇMİŞ...68 v

7 TABLO LİSTESİ Tablo 4.1. Gündüz alınan görüntülerin analizinde kullanılan yöntem seçim tablosu 33 Tablo 4.2. Gece alınan görüntülerin analizinde kullanılan yöntem seçim tablosu 39 vi

8 ŞEKİL LİSTESİ Şekil 2.1. TUG tüm gökyüzü kamera sistemi...3 Şekil 2.2. TUG daki tüm gökyüzü kamera sisteminin bileşenleri...4 Şekil 3.1. Renk uzayları...7 Şekil 3.2. RGB renk uzayını tanımlayan bir şekil...7 Şekil 3.3. HSV renk uzayının konik gösterimi ve silindir biçimli gösterimi...8 Şekil 3.4. CIE Lab renk uzayı...9 Şekil 3.5. CIE XYZ renk uzayı...10 Şekil 3.6. Örnek tüm gökyüzü kamerası görüntüsü ve örnek maskeleme görüntüsü...14 Şekil 3.7. Maskeleme sisteminde kullanılan görüntü...15 Şekil 3.8. Örnek yapılandırma elemanları...18 Şekil 3.9. K-means adımları...21 Şekil Örnek gri seviye görüntü ve histogramı...23 Şekil 3.11 Örnek görüntünün arka plan histogramı...23 Şekil Örnek görüntünün ön plan histogramı...24 Şekil Bölütlenmiş görüntü...25 Şekil 4.1. Örnek tüm gökyüzü kamera görüntüsü ve bu görüntünün piksellerinin HSV uzayında dağılımı...28 Şekil 4.2. Şekil 4.1'deki görüntünün piksellerinin HSV uzayında dağılımı...28 Şekil 4.3. Şekil 4.1 den HSV uzayında Güneş tespit edilen pikseller...29 Şekil 4.4 Şekil 4.3 e aşınma işlemi uygulanarak elde edilen görüntü...29 Şekil 4.5. Şekil 4.4 deki görüntünün en büyük nesnesini gösteren görüntü...30 Şekil 4.6. Şekil 4.5 deki nesnenin boşlukları doldurularak elde edilen görüntü...30 Şekil 4.7. Güneş işaretli görüntü...31 Şekil 4.9. R-B yöntemine örnek görüntü ve bunun bulut işaretli durumu...32 Şekil 4.10 Açık gecede yıldızların etkisi...34 Şekil Orijinal görüntü...35 Şekil Şekil 4.11 deki görüntünün R bileşeni...35 Şekil Şekil 4.12 ye açınım işlemi uygulanarak elde edilen görüntü...36 vii

9 Şekil Şekil 4.11 deki görüntünün bulut işaretli durumu...36 Şekil Orijinal görüntü ve bunun Ay tespit edilmiş hali...37 Şekil K-means yöntemine örnek görüntü...38 Şekil 5.2. Gündüz görüntüleri üzerinde yapılan analiz...41 Şekil 5.5. Güneş ve ay yansıma engelleyici...43 viii

10 SİMGE VE KISALTMALAR Simgeler Açıklama σ Varyans ω Ağırlık μ Ortalama Kısaltmalar ASA Açıklama American Standards Association CIE Commission Internationale de I Eclairage CMY Renk Uzayı DSLR Digital single-lens reflex GIF Graphics interchange format HSV Hue Saturation Value (Renk Uzayı) HLS(HSL) Hue Saturation Lightness (Renk Uzayı) JPEG Joined Photographic experts group kb Kilobyte LAB Renk Uzayı LUV Renk Uzayı ix
 JPEG Joined Photographic experts group kb Kilobyte LAB Renk Uzayı LUV")
11 mv Milivolt RGB Red Green Blue (Renk Uzayı) TUG TÜBİTAK Ulusal Gözlemevi USB Universal Serial Bus x

12 1. GİRİŞ Hava raporu ve uydu görüntüleri, bulunulan bölgenin durumu hakkında düşük çözünürlükte ve genel bir fikir verebilmektedir. Dolayısıyla gözlemevi yerleşkesi gibi bir bölgenin bulutluluk durumu hakkında detaylı bilgi verememektedir. Gökyüzü ısı ölçümünde ise kullanılan algılayıcılar yardımıyla gökyüzü ve yeryüzü ortalama ısıları ölçülerek, bulunan değerlerin kıyaslanması ile bulutluluk tespiti yapılmaktadır. Ashley ve Jurcevic (1991) tarafından yapılan çalışmada bulutların ortamda varlığının, bulutların kızılötesi emisyonundan faydalanılarak belirlenebileceği gösterilmiştir. Bulutlu bölge açık bölgeye göre daha fazla sinyal üretecektir. Bu bilgiler ışığında Clay vd. (1999) kızılötesi algılayıcılar kullanarak bulut bulucu yapmışlardır. Kızılötesi algılayıcı olarak termopil kullanılmıştır. Termopil birkaç termokuplın seri olarak bağlanmasıyla elde edilen algılayıcıdır. Termokupl ise iki farklı metal alaşımın uçlarının birleştirilmesi ile elde edilen bir sıcaklık ölçü elemanıdır. İki uç arasındaki sıcaklık farkına orantılı olarak soğuk nokta uçlarında mv değerlerinde gerilim oluşur. İki uç arasındaki sıcaklık dağılımı nasıl olursa olsun üretilen gerilim sıcak ile soğuk nokta arasındaki sıcaklık farkına orantılıdır (Kartal D, 2006). Termokupl kullanılarak geliştirilen ticari bulut algılayıcıları da bulunmaktadır (Diffraction Limited, 2011). Bu tip sistem gökyüzü hakkında açık, bulutlu, çok bulutlu, yağmurlu gibi bilgiler verebilmektedir. Ancak bulutun konumu ve miktarı hakkında kesin bir bilgi elde edilememektedir. Aynı zamanda ölçüm alanı da tüm gökyüzünü kapsamamaktadır. Diğer bir yöntem ise yüksek çözünürlüklü bir kameraya balıkgözü lens takılarak alınan tüm gökyüzü görüntülerinin analizi ile bulutluluk tespiti yapmaktır. Alınan görüntülerin bölgedeki tüm gökyüzüne ait olması ve görüntü işleme yöntemleri ile bulutların yerinin belirlenebilmesi dolayısıyla bu yöntem çok kullanılmaya başlanan bir yöntem olmuştur. Günümüzde yapılan çalışmalar tüm gökyüzü kamerasından alınan görüntülerin verilerinin daha yüksek doğrulukta analiz edilebilmesine yönelmiştir (Pfister vd., 2003) (Heinle vd., 2010) (Roy vd., 2008). 1
 tarafından yapılan çalışmada bulutların ortamda varlığının, bulutların kızılötesi emisyonundan faydalanılarak belirlenebileceği gösterilmiştir.")
13 Bu tezin amacı TÜBİTAK Ulusal Gözlemevi'ndeki TUG tüm gökyüzü kamerası ile alınan verilerin analizi ile bulutluluk tespiti yapılmasıdır. Bulutluluk tespiti için günümüzde çeşitli yöntemler kullanılmaktadır. Bunlardan bazıları hava raporu ve uydu görüntüleri, gökyüzü ısı ölçümü ve tüm gökyüzü kamerasından alınan görüntülerin analizi ile elde edilen bulutluluk ölçümüdür. 2

 2-CANON EOS5D DSLR Kamera (Şekil 2.2) 3-Peleng 8 mm f3.5 Balık Gözü Mercek (Şekil 2.1 ve Şekil 2.2) 4-Pardus 8.")
14 2. ÖLÇME DÜZENEĞİ TÜBİTAK Ulusal Gözlemevi (TUG) Bakırlıtepe Yerleşkesi ne ait gece/gündüz tüm gökyüzünü gösteren sayısal kamera sistemi aşağıdaki bileşenlerden oluşmaktadır. 1-Küresel pencereli, izoleli, muhafaza kutusu (Şekil 2.1) 2-CANON EOS5D DSLR Kamera (Şekil 2.2) 3-Peleng 8 mm f3.5 Balık Gözü Mercek (Şekil 2.1 ve Şekil 2.2) 4-Pardus 8.0 İşletim Sistemi 5-Gphoto2 Yazılımı 6-Kamera kontrol, arşivleme ve astronomik hesaplar için yazılmış kabuk betikleri. Kamera sistemi TUG Bakırlıtepe Yerleşkesi Merkez Bina çatısında, gökyüzüne bakan yüzünde şeffaf, polyester bir yarıküre bulunan özel bir izolasyonlu kutu içerisinde çalışmaktadır. Kamera için gerekli enerji ve USB veri kablolaması, çatı ile bilgisayar sistem odası arasındaki kablo kanalından sağlanmıştır. Kameranın tüm idaresi buradaki Pardus 8.0 işletim sistemi yüklü bir mini masaüstü bilgisayar ile yapılmaktadır. Şekil 2.1. TUG tüm gökyüzü kamera sistemi 3



15 Şekil 2.2. TUG daki tüm gökyüzü kamera sisteminin bileşenleri * Muhafaza kutusu, polyester yarıküre pencere, kamera, bağlantı kabloları Kameraya USB veri yolu üzerinden GPHOTO2 adlı yazılım ile bağlanılmakta ve amaca uygun olarak yazılan eos5d_main, eos_capture adlı iki kabuk betiği ve astronomik hesapların yapıldığı zh_gunes.php kodu tarafından kameranın otomatik olarak 7/24/365 çalışması sağlanmaktadır. Kamera, aşağıda sıralanan özellikler çerçevesinde çalışacak şekilde hazırlanmıştır. 1. Kamera Manual modda, balıkgözü mercek ise 3.5 diyafram açıklığında ve sonsuz ( ) odak ayarında çalıştırılmaktadır. 2. Kamera kendi üzerindeki hafıza kartına her 5 dk. da bir 4368x2912 piksel çözünürlüğünde renkli görüntü almaktadır. 3. Alınan görüntü JPG formatında ve %100 kalitede 502x429 piksel çözünürlüğüne indirilmekte (yaklaşık 35 kb/kare), üzerine yön, tarih ve saat bilgisi yazılarak web sayfasına ve arşive gönderilmektedir. Bu işlemden sonra kameranın hafıza kartındaki görüntü silinmektedir. 4. Kamera Güneş in gökyüzünde olduğu sürece 100 ASA ve 1/2500 sn. poz süresi ile görüntü almaktadır. Güneş battıktan sonra kararan havaya uyum sağlamak için akşam 4

16 tanı bitimine kadar poz süreleri her 5 dk. da bir 3 er adım arttırılarak (1/2500 sn., 1/1250 sn., 1/1000 sn., 1/640 sn.,...) görüntü alınmaktadır. Akşam tanı bitiminde de gece ASA ayarı ve poz süresine (1600 ASA, 30 sn.) geçilmektedir. Sabah tanı başladığında da işlem akşam tanının tersine devam etmektedir (20 sn., 13 sn., 8 sn., ). Güneş doğduğunda da yine gündüz poz süresi ve ASA ayarına geçilmektedir (1/2500 sn., 100 ASA). 5. Çekilen her görüntü aşağıdaki klasör ve isimlendirme yapısında arşivlenir.home/webcam/public_html/archive/kamera1/yyyy_mm/yyyymmdd/tug_asc1_yyy ymmdd_hhmmss.jpg. Arşive giden görüntülerden her gün öğleyin 12:00 de GIF formatında günlük animasyon dosyası oluşturulmakta ve web sayfasında günlük animasyonlar şeklinde yayınlanmaktadır. Bir günlük animasyon dosyası içerisinde o gün öğleyin 12:00'de başlayıp ertesi gün öğleyin 12:00 ye kadar olan 5 er dakika ara ile alınmış görüntüler olmaktadır. Animasyon dosyaları aşağıdaki klasör ve isimlendirme yapısında arşivlenmektedir. /home/webcam/public_html/archive/kamera1/animation/tug_asc1_yyyy-mm-dd-anim.gif Örnek: /home/webcam/public_html/ archive/kamera1/animation/tug_asc1_2010_12_20-anim.gif 5

17 3. GÖRÜNTÜ ANALİZ YÖNTEMLERİ Yapılan çalışmada bulutluluk analizi gündüz ve gece olmak üzere iki farklı zaman diliminde yapılmıştır. Gündüz ve gece görüntülerinin analizi için farklı yöntemler kullanılmıştır. Gündüz bölümündeki çalışmada renkli görüntü işleme uygulanmıştır. Gece alınan görüntüler ikiye ayrılmış; aydınlık gecelerde, gündüz alınan görüntülerin analizindekine benzer yöntem, karanlık gecelerde ise; gri seviyede eşik değeri belirlenerek bulutluluk tespiti yapılmıştır. İlk önce çalışmada kullanılan yöntemler açıklanacak sonra uygulamaya geçilecektir Renk Uzayları Farklı modellerdeki renk saklama ortamları için bazı donanım standartları vardır. Bu standartların hepsinde bir benek üç boyutlu uzayda bir nokta olarak gösterilir. Çünkü renkmetri biliminin temelini oluşturan Grassmann'ın birinci kanununa göre bir rengi belirlemek için birbirinden bağımsız üç değişkene gerek vardır (Grassman vd. 1996). Bu uzayda eksenler renk (kırmızı, yeşil, mavi gibi), parlaklık, doygunluk ve renk tonu olarak belirlenir. Standart bazı renk uzaylarına örnek olarak RGB, CMY, HSV, HLS, CIE renk uzayları verilebilir. Bunlardan HSV ve HLS renk uzayları silindirik koordinatlarda, RGB, CMY ve CIE renk uzayları ise kartezyen koordinatlarda tanımlıdır. Bazı renk uzayları cihaz bağımlı iken bazıları cihaz bağımsızdır. Cihaz bağımlı renk uzaylarında renkler cihazın özelliklerine bağlı olarak üretildiği için iki farklı cihaz aynı değerleri farklı yorumlayacaktır. Cihaz bağımsız renk uzayları ise CIE tarafından standart gözlemci, standart aydınlatıcı gibi tanımlamalar yapılarak oluşturulmuştur (Smith ve Guild, ). Şekil 3.1 de çeşitli renk uzaylarının bazı özeliklerine göre dağılımı gösterilmiştir. 6


 kelimelerinin baş harflerinden alan bir renk uzayıdır.")


18 Şekil 3.1. Renk uzayları RGB renk uzayı RGB renk uzayı ismini İngilizcedeki 'Red' 'Green' 'Blue' (yani Kırmızı, Yeşil, Mavi) kelimelerinin baş harflerinden alan bir renk uzayıdır. En sık kullanılan renk uzaylarındandır. Işığı temel alarak, doğadaki tüm renklerin kodları bu üç temel renge referansla belirtilir. Her renk %100 oranında karıştırıldığında beyaz elde edilir. Renk değerlerinin sıfır olduğu durumda ise siyah renk elde edilir. Şekil 3.2'de kırmızı, yeşil ve mavi değerleri sırasıyla 80, 200 ve 130 olacak şekilde örnek bir nokta verilmiştir (RGB Renk uzayı, Şekil 3.2. RGB renk uzayını tanımlayan bir şekil 7

. Renk özü rengin baskın dalga boyunu belirler, örneğin sarı, mavi, yeşil, vb.. Sıfır ile 360 arasında açısal bir değerdir.")

19 HSV renk uzayı HSV (Hue, Saturation, Value) veya HSB (Hue, Saturation, Brightness) renk uzayı, renkleri sırasıyla renk özü, doygunluk ve parlaklık olarak tanımlar (HSV renk uzayı, Renk özü rengin baskın dalga boyunu belirler, örneğin sarı, mavi, yeşil, vb.. Sıfır ile 360 arasında açısal bir değerdir. Bazı uygulamalarda ise 0 ile 100 arasında kullanılır. Doygunluk, rengin canlılığını belirler. Yüksek doygunluk canlı renklere neden olurken, düşük doygunluk rengin gri tonlarına yaklaşmasına neden olur arasında değişir. Parlaklık ise rengin aydınlığını yani içindeki beyaz oranını belirler arasında değişir. HSV renk uzayı Smith (1978) tarafından tanımlanmıştır. Amacı RGB uzayına göre insan görme düzeneğine daha yakın bir yapı oluşturmaktır. HSV, RGB renk uzayından doğrusal olmayan bir dönüşüm ile elde edilir. Her ne kadar HSV ve HSB aynı uzayı tanımlasalar da HSL farklı bir renk uzayıdır. HSV ayrıca aygıt bağımlıdır. Yani bu uzayda tanımlı bir renk, rengi üreten cihaza göre değişim gösterebilir. Aygıttan bağımsız renk gösterimi için CIE Lab veya CIE Luv kullanılmalıdır. Şekil 3.3. HSV renk uzayının konik gösterimi ve silindir biçimli gösterimi 8


20 HSV uzayı, ilk tanımlandığı zamanlarda konik bir biçime sahipti. Ancak sonraki yıllarda, gerçek zamanlı geçerli koordinat denetimi için zamanın bilgisayarları yeterli olmadığından silindir biçimine dönüştürüldü. Açmak gerekirse, konik biçimde, aydınlık düzeyi azaldıkça koninin genişliği azalır, dolayısıyla, insan görmesine uygun olarak, düşük aydınlıkta algılanabilen farklı doygunluk düzeyleri de azalırlar. Diğer yandan, silindir biçimi ile sıfır aydınlık düzeyinde bile yüksek doygunluk düzeyleri tanımlanabilir ve böylece geçersiz renkler elde edilebilir. Dolayısıyla görüntü işleme uygulamalarında konik biçimi tercih edilirken, renk seçimi görevlerinde silindir biçimi kullanılma eğilimi vardır Lab renk uzayı CIE Lab renk uzayı parlaklık (L), kırmızı-yeşil (a) ve sarı-mavi (b) bileşenlerinden oluşmaktadır. Şekil 3.4' de Lab renk uzayı gösterilmiştir. Şekil 3.4. CIE Lab renk uzayı CIE XYZ renk uzayı İnsan gözünde kırmızı, yeşil ve maviye hassas renk algılayıcı hücreler bulunmaktadır. Bu hücrelerden beyne gelen sinyaller ile ışık şiddetini algılayan diğer hücrelerden gelen sinyaller beyin tarafından birleştirilir ve bu şekilde değişik renk algılamaları oluşur. XYZ 9


21 renk uzayındaki X, Y, Z değerlerinin, bu 3 değerin toplamına oranı renkleri tanımlar. X değerinin X, Y ve Z toplamına oranı kırmızıyı, Y ve Z nin bu toplama oranları ise sırasıyla mavi ve yeşili temsil eder ve x, y, z olarak gösterilir. X, y ve z değerleri 0 ile 1 arasındadır ve toplamları 1'dir (Wright, 1928). CIE tarafından 1931 yılında standart aydınlatıcı ve standart gözlemci tanımlamaları üzerine kurulan CIE XYZ renk uzayının iki boyutlu gösterimi Şekil 3.5'deki gibidir (Smith ve Guild, ). Şekil 3.5. CIE XYZ renk uzayı 3.2. Dönüşümler Çalışılan sistemde değişik renk uzaylarından faydalanıldığı için renk uzayları arasında dönüşümler uygulanmıştır. Bu dönüşümlerin adımları alt bölümler halinde gösterilmiştir RGB renk uzayından HSV renk uzayına dönüşüm Ford ve Roberts (1998) tarafından verilen RGB renk uzayından HSV renk uzayına dönüşüm adımları aşağıda verilmiştir: H değeri 0 ile 360 arasında olup S ve V değerleri 0 ve 1 aralığındadır. R, G ve B değerleri 0 ile 1 arasında normalize edilmiştir. 10
22 HSV değerlerinin hesaplanmasında MAX ve MIN değerleri kullanılır. Bu değerler RGB uzayındaki R,G ve B üçlüsünün en büyük ve en küçük değeridir. H değerini hesaplamak için R', G' ve B' değerleri hesaplanır. R = G = B = MAX R MAX MIN MAX G MAX MIN MAX B MAX MIN Daha sonra H değeri hesaplanır. S = 0 ise H tanımsızdır 3.4 Değilse ve eğer R = MAX ve G = MIN ise H = 5 + B 3.5 Değilse ve eğer R = MAX ve G MIN ise H = 1 G 3.6 Değilse ve eğer G = MAX ve B = MIN ise H = R Değilse ve eğer G = MAX ve B MIN ise H = 3 B 3.8 Değilse ve eğer R = MAX ise H = 3 + G 3.9 Diğer durumlarda H = 5 R 3.10 Bulunan H değeri 60 ile çarpılarak 0 ile 360 arasındaki derece cinsinden değer bulunur. S ve V değerlerinin bulunuşu ise aşağıdaki gibidir. MAX = 0 ise S = Diğer durumlarda S = 1 MIN MAX 3.12 V değeri ise aşağıdaki gibidir: V = MAX
23 RGB renk uzayından Lab renk uzayına dönüşüm RGB renk uzayından Lab renk uzayına doğrudan çevirim iki aşamada yapılmaktadır RGB renk uzayından XYZ renk uzayına dönüşüm İlk önce R G ve B değerleri 0 ile 1 arasında değer alacak şekilde normalize edilir. Değerler 8 bitlik bir görüntü için 255'e bölünür. Var = Var = Var = R 255 G 255 B CIE 1931 standartlarında lineer R, G ve B değerlerinden X, Y ve Z değerlerini elde etmek için gereken dönüşüm katsayıları verilmiştir (Smith ve Guild, ). Ancak, insan görme sistemine uygun olarak bant genişliğini maksimum verimle kullanmak için görüntülere gama düzeltmesi uygulanmaktadır (Charles, 2003). Lineer olmayan bu dağılımı lineer hale getirmek için aşağıdaki dönüşümler uygulanır. var R=..., eğer var > var 12.92, değilse 3.17 var G =..., eğer var > var 12.92, değilse 3.18 Var B =..., eğer var > var 12.92, değilse
24 Lineer değerler elde edildikten sonra CIE standartlarına göre 2 derecelik açıyla görüş ve D65 aydınlatıcısına göre elde edilmiş olan katsayılar kullanılarak X, Y ve Z değerleri elde edilir. X var Y = var 3.20 Z var XYZ renk uzayından Lab renk uzayına dönüşüm İlk önce CIE standartlarına 2 derecelik görüş ve D65 aydınlatıcısına göre elde edilmiş beyaz nokta değerleri ile X,Y ve Z değerleri normalize edilir. var Z = 3.21 var Y = 3.22 var Z = 3.23 Denklem 3.21, 3.22 ve 3.23 de kullanılan referans değerleri sırasıyla , 100 ve dür. Daha sonra L, a b değerleri hesaplanır (Ford ve Roberts, 1998). var X= (var ) ( ), eğer var > (var 7.787) + (16 116), değilse 3.24 var Y= (var ) ( ), eğer var > (var 7.787) + (16 116), değilse var Z= (var ) ( ), eğer var > (var 7.787) + (16 116), değilse

25 L=(116 var ) a=500 (var var ) 3.28 b=200 (var var ) Çalışma Alanı (maskeleme) Tüm gökyüzü kamerasından alınan görüntülerde Şekil 3.7'de görüldüğü üzere görüntünün bir kısmı yeryüzü, ufuk ve kameranın kapattığı bölümden oluşmaktadır. Çalışma alanının alınan görüntünün tamamını kapsamamasından dolayı, her görüntü için Şekil 3.8'deki gibi bir maskeleme sistemi oluşturulmuştur. Karanlık gecede bulutluluk analizinde çalışma alanının küçültülmesi gerektiğinden, maskeleme görüntüsü biraz daha değişik olacaktır. Analiz için yapılan yazılım bu maskeleme dosyasını alarak siyah beyaz bir ikili formata çevirmektedir. Beyaz bölgede kalan koordinatlar indeks olarak alınmış ve görüntü analizi bu bölgede yapılmıştır. Oluşturulan maskeleme dosyası istenildiğinde değiştirilerek çalışma alanının daha esnek olması sağlanmıştır. Şekil 3.6. Örnek tüm gökyüzü kamerası görüntüsü ve örnek maskeleme görüntüsü 14

26 Şekil 3.7. Maskeleme sisteminde kullanılan görüntü 3.4. Bağlantılı Bileşen Etiketleme Yöntemi İkili seviyedeki bir görüntüde sıfır değerine sahip olan pikseller arka plan, bir değerine sahip olan pikseller ise görüntüdeki nesneler olarak ele alınır. Bu nesnelerin şekillerini, boyutlarını belirlemek için kullanılan yöntemlerden birisi bağlantılı bileşen etiketleme yöntemidir. Bu yöntemde pikseller, komşuluklarına bakılarak taranır ve birbirine bağlantılı olan pikseller aynı numara ile etiketlenir. Bağlantılı bileşen etiketleme yönteminin algoritması aşağıdaki adımlardan oluşmaktadır (Sonka vd., 2008a). Görüntü pikselleri üzerinden soldan sağa ve yukarıdan aşağıya iki defa tarama yapılır. İlk taramada arka plana ait olmayan piksellere 1'den başlayarak etiket numarası verilir. Etiket numarası verilecek pikselin komşulukları kontrol edilir. Eğer komşuluğundaki tüm pikseller arka plana ait ise etiket numarası bir arttırılır. Eğer komşuluğunda sadece bir tek etiket numarasına ait piksel varsa, bu etiket numarası incelenen piksele de verilir. U şeklindeki ya da ters E şeklindeki bileşenlerin bazı piksellerinde komşuluğa bakıldığında birden fazla sayıda etiket numarası görülür. Bu durumda pikseller bu etiket numaralarından birisi ile etiketlenir. Bu etiket numaraları eşit etiket çiftleri olarak başka bir veri yapısında depolanır. İkinci taramada bütün pikseller tekrar taranarak eşit etiket olarak veri yapısında tutulan etiket numaraları, küçük olanın numarasıyla değiştirilir. Böylece bütün komşu pikseller aynı numara ile etiketlenmiş olur. 15
27 3.5 Morfolojik İşlemler Matematiksel morfoloji teorisi, nonlineer operatörlerle nesne şekilleri üzerinde işlem yapmaya dayanır. Önindirgeme, nesne şekline göre bölütleme, nesne miktarı belirleme gibi birçok uygulamada hızlı ve başarılı çözümler üretebilmektedir (Sonka vd., 2008b). Operatörler görüntü işlemede iki parça veri kümesi ile kullanılırlar. 1- Operatörün uygulanacağı görüntü 2- Yapılandırma elemanı: Görüntüde dolaşan piksel grubudur. Yapılandırma elemanları farklı şekillerde ve büyüklükte olabilmektedir. Bunların bir merkez noktası bulunmakta olup, bu nokta işlenecek resmin her bir pikseli üzerinde gezdirilerek işlem yapılmaktadır. En çok kullanılan morfolojik operatörler şunlardır: 1- Genleşme (Dilation) 2- Aşınma (Erosion) 3- Açınım (Opening) 4- Kapanım (Closing) Matematiksel morfoloji, görüntünün şekilsel yapısına dayanan kümeler teorisi üzerine kurulmuş bir yaklaşımdır. Matematiksel morfoloji teorisinin temelleri ilk olarak Georges Matheron ve Jean Serra tarafından 1980 li yıllarda atılmıştır (Serra vd.,1982, 1988). Bu metodun temelinde iki morfolojik operatör olan aşınma ve genleşme yatmaktadır. Sayısal işaretler için aşınma işlemi, bir Minkowski küme çıkarma işlemi, genleşme işlemi ise Minkowski küme toplama işlemidir. Aşınma işlemi kümeler cebirinde kesişim işlemine, genleşme işlemi ise kümeler cebirinde birleşim işlemine denk düşmektedir. Bu işlemler Serra (1988) tarafından ikili olmayan işaretlere de genişletilmiştir. Temel ikili morfolojik işlemlerin matematiksel ifadeleri aşağıdaki denklemlerle tanımlanmaktadır: 16
28 X B={pϵZ 2 :p=x+b, xϵx, bϵb} genleşme 3.30 XϴB={ pϵz 2 :p+bϵx,ᴠbϵb} aşınma 3.31 XoB=(XϴB) B açınım 3.32 X B=(X B)ϴB kapanım 3.33 Yukarıdaki denklemlerde X Görüntü, B Yapı elemanı, x X'in elamanı,b B'nin elemanıdır Genleşme işlemi Görüntüdeki bir nesneyi büyütmeye ya da kalınlaştırmaya yarayan morfolojik işlemdir. Sayısal bir görüntüyü genişletmek onu yapısal elemanla kesiştiği bölümler kadar büyütmektir. Görüntünün her bir pikseli, yapısal elemanın merkez noktasına oturtularak genleşme işlemi yapılmaktadır. Kalınlaştırma işleminin nasıl yapılacağını yapısal eleman belirler. Genleşme işlemi uygulanan görüntüde, görüntü içerisindeki deliklerin ve boşlukların doldurulması ve köşe noktasının yumuşaması gözlenir (Gonzalez vd., 2003) Aşınma işlemi Görüntüdeki nesneyi küçültmeye ya da inceltmeye yarayan morfolojik işlemdir. Bu işlem tam olarak olmasa da bir bakıma genleşme işleminin tersi gibi düşünülebilir. Görüntüdeki nesneler ufalır, delik kısım genişler, birbirine bağlı nesneler ayrılma eğilimi gösterir (Gonzalez vd. 2003) Açınım işlemi Temel olarak aşınma işlemini takip eden genleşme işlemidir. Görüntüdeki nesnenin çevresini yumuşatır ve ince çıkıntıları yok eder. Nesneler orijinal görüntüdeki nesneye göre biraz küçülmüş olur. Görüntü içerisindeki nesneler ve nesne içerisindeki boşluklar yapısal elemanın büyüklüğüne göre temizlenir. Birbirine yakın nesneler birbirinden ayrılmış olur (Karhan vd., 2011). 17

29 Kapanım işlemi Temel olarak genleşme operatörünü takip eden aşınma operatörüdür. Açınım işlemindeki gibi görüntüdeki nesnenin çevresini yumuşatır ama ince boşlukları doldurarak nesnedeki delikleri kapatır. Nesneler orijinal görüntüdekine göre büyür ve birbirine yakın nesneler bağlanmış olur (Karhan vd., 2011) Yapılandırma elemanı Yapılandırma elemanı; görüntü üzerinde yapacağımız işleme ve yapmak istediğimiz uygulamaya göre istenilen boyutlarda ve istenilen şekilde hazırlanmış küçük ikili seviyede bir görüntüdür. Yapılandırma elemanı farklı geometrik şekillerden herhangi biri olabilir. En çok kullanılanları kare, dikdörtgen ve dairedir. Şekil 3.8 de yapılandırma elemanına örnekler verilmiştir. Şekil 3.8. Örnek yapılandırma elemanları Gri seviyede morfolojik işlemler İlk başlarda ikili seviyede kullanılan morfolojik operatörler, minimum ve maksimum işlemleri kullanılarak gri seviyede de uygulanabilmektedir. Aşınma işleminde her piksele komşuluğundaki minimum piksel değeri verilir. Genleşmede ise maksimum piksel değeri verilir. 18
30 3.6. K-means Yöntemi Mac Queen (1967) tarafından bulunan K-means algoritması, kümeleme problemini çözen en basit denetimsiz öğrenme algoritmalarından biridir. Bölümleyici kümeleme tekniklerinden olan K-means, bilimsel ve endüstriyel uygulamalarda yaygın olarak kullanılmasının yanında görüntü bölütlemede de çok kullanılan kümeleme algoritmaları arasında yer almaktadır. Benzer özellik taşıyan veri elemanlarının kendi aralarında gruplara ayrılması işlemi kümelemedir. K-means algoritmasının genel mantığı, n adet veri nesnesinden oluşan bir veri kümesini (X), giriş parametresi olarak verilen k (k n) adet kümeye bölmektir. Amaç, gerçekleştirilen bölme işlemi sonunda elde edilen kümelerin; küme içi benzerliklerinin en büyük ve kümeler arası benzerliklerinin en küçük olmasını sağlamaktır. K-means kümeleme yönteminin değerlendirilmesinde nesnelerin bulundukları kümelerin merkez noktalarına uzaklıkları hesaplanır. Bu uzaklığın hesaplanmasında Öklid uzaklığı, Manhattan uzaklığı, Chebyshev uzaklığı gibi farklı formüller kullanılmaktadır. K-means kümeleme yönteminin değerlendirilmesinde en yaygın olarak Öklid uzaklığın karesi kullanılır. Yapılan çalışmada da bu kriter kullanılmıştır. En düşük Öklid uzaklığı karesi değerine sahip kümeleme en iyi sonucu verir. Nesnelerin bulundukları kümelerin merkez noktalarına olan uzaklıklarının karelerinin toplamı Denklem 3.34 ile hesaplanmaktadır (Aloise vd, 2009). Öklid Uzaklık (M, x) denkleminde k küme sayısı, M kümenin merkezi, X veri kümesi, x ise küme elemanıdır. Bu kriterleme sonucu, k tane kümenin olabildiğince yoğun ve birbirinden ayrı sonuçlanması hedeflenmeye çalışılır. Algoritma, Öklid uzaklığı kareleri toplamını azaltacak k parçayı belirlemeye gayret eder. K-means algoritması, algoritmaya kullanıcı 19
31 tarafından verilen k parametresi ile n tane veriden oluşan veri setini k adet kümeye böler. Küme benzerliği kümedeki nesnelerin ortalama değeri ile ölçülür, bu da kümenin ağırlık merkezidir (Xu ve Wunsch (2005)) K-means yönteminin adımları K-means adımları aşağıda açıklanmıştır: a) İlk önce küme merkezleri (kırmızı noktalar) belirlenir. Bunun için iki farklı yöntem kullanılabilir. İlk yöntemde nesneler arasından küme sayısı olan k adet rastgele nokta seçilmesidir. İkinci yöntem ise merkez noktaların tüm nesnelerin ortalaması alınarak belirlenmesidir. b) Test kümesindeki her verinin seçilen merkez noktalara yakınlığı Öklit uzaklığı yöntemiyle hesaplanır. c) Her veri kendine en yakın merkez noktanın olduğu kümeye dahil edilir. d) Oluşan kümelerin merkez noktaları o kümedeki tüm nesnelerin ortalama değerleri ile değiştirilir. e) Kümeleme işlemi yeni merkez noktasına göre tekrar yapılır. Merkez noktalar değişmeyene kadar b, c, d ve e adımları tekrarlanır. Algoritmanın performansını etkileyen kriterler; k küme sayısı, başlangıç olarak seçilen küme merkezlerinin değerleri ve benzerlik ölçümüdür. K-means yönteminin adımları Şekil 3.9'da verilmiştir. CIE Lab renk uzayı RGB renk uzayına göre görsel açıdan daha düzgün değişim gösterdiği için mesafeye bağlı kümeleme algoritmasında işlem sonucu CIE Lab renk uzayında daha başarılı olmaktadır. 20


32 3.7. Otsu Metodu Gri seviyede bir görüntüyü ikili biçime çevirmek için izlenecek yöntemde, bir eşik değeri belirlenir ve bu eşik değerin üzerindeki renkler beyaza, altındaki renkler siyaha dönüştürülür. Ancak tüm görüntüler için sabit bir eşik değeri kullanılırsa, görüntüler üzerinde kabul edilebilir sonuçlar almak mümkün olmayacaktır. Eşik değerin, resmin renk dağılımına uygun olarak belirlenmesini sağlayacak bir yöntem Otsu (1979) metodudur. Otsu metodu gri seviye görüntüler üzerinde çalışır ve sadece yoğunluk değerlerinin görüntü üzerinde kaçar defa bulunduğuna bakar. Bu yüzden önce görüntünün renk histogramı hesaplanır. Daha sonra yapılan bütün işlemler histogram dizisi üzerinde gerçekleştirilir. Şekil 3.9. K-means adımları *Kırmızı noktalar kümelerin ağırlık merkezini, yeşil ve sarı noktalar ise küme elemanlarını göstermektedir. 21
33 Varyans Varyans belli bir sayı dizisinin dizinin aritmetik ortalaması etrafındaki dağılımının yorumlanabilmesini sağlayan bir ölçüdür. Varyansın büyük olması, değerlerin dağınık ve kendi ortalamalarından uzak olduklarını, küçük olması ise değerlerin kendi ortalamaları etrafında çok dağılmadıklarını gösterir. Varyans formülü aşağıdaki eşitlikte verilmiştir. σ = (X μ ) Pr (X ) 3.35 Denklem 3.35 de μ ağırlıklı ortalama, X X kümesinin elemanı, Pr(X ) olasılık fonksiyonudur. Görüntü üzerinde bir renk değerinin olasılığı bu değerin resimdeki sayısının, toplam piksel sayısına bölümüdür Otsu metodu ve algoritması Otsu metodunda, sınıf içi varyansı minimuma indiren eşik değeri aranmaktadır. Bu değer aşağıdaki gibi hesaplanmaktadır. σ (t) = ω (t) σ (t) + ω (t) σ (t) 3.36 Denklem 3.36'da ω ve ω t eşik değeri ile ayrılan sınıfların ağırlık değerleri, σ ve σ oluşan sınıfların varyanslarıdır. Şekil 3.10'da gri seviyede örnek bir görüntü ve histogramı verilmiştir. 22



34 , Şekil Örnek gri seviye görüntü ve histogramı Bu görüntü 36 piksellik bir gri seviyede görüntüdür ve yoğunluk değeri 0 ile 5 arasında değişmektedir. Eşik değeri 3 olan bu görüntü için arka plan histogramı Şekil 3.11 de gösterilmiştir. Şekil 3.11 Örnek görüntünün arka plan histogramı Şekil 3.11'deki histogram için ağırlık, ortalama ve varyans değerleri sırasıyla ω = = (0x8) + (1x7) + (2x2) μ = = σ = (( ) x8) 17 + (( ) x7) + (( ) x2) = olarak hesaplanır. 23
 x6) 19 + ((4 3.8947) x9) + ((5 3.8947) x4) = 0.5152 3.")
35 Şekil Örnek görüntünün ön plan histogramı Şekil 3.12'de verilen ön plan histogramı için de aynı değerler hesaplanır. ω = = (3x6) + (4x9) + (5x4) μ = = σ = (( ) x6) 19 + (( ) x9) + (( ) x4) = Sınıf içi varyans daha önceden verilmiş olan formülle hesaplandığında aşağıdaki sonuç elde edilir: σ (t) = ω (t) σ (t) + ω (t) σ (t) = x x = Yukarıda anlatılan işlemler tüm yoğunluk değerleri için hesaplanır ve en küçük sınıf içi varyans değerini veren eşik değeri bölütleme işleminde kullanılır. Örnek görüntünün bulunan eşik değerine göre bölütlenmiş hali Şekil 3.13'deki gibidir. 24
 = σ σ (t) = ω (t)ω (t)(μ (t) μ (t)) 3.44 Denklem 3.")
36 Şekil Bölütlenmiş görüntü Sınıf içi varyans değeri minimum iken, sınıflar arası varyans değeri maksimum olur. Sınıflar arası varyansın formülü aşağıda verilmiştir: σ (t) = σ σ (t) = ω (t)ω (t)(μ (t) μ (t)) 3.44 Denklem 3.44'de σ arka plan görüntü için varyans değeri μ ve μ sırasıyla arka plan ve ön plan görüntü için ortalama değerleri ω ve ω ise sırasıyla arka plan ve ön plan görüntü için ağırlık değerleridir. Denklem 3.44 sınıfların olasılıkları ve ağırlıkları cinsinden sınıflar arası varyans formunu vermiştir. Bu ifade sınıf içi varyansların hesaplanmasına göre daha az işlem gerektirir. Dolayısıyla efektif bir algoritma olarak kullanılabilir. Otsu metodunun uygulanışının algoritması aşağıda verilmiştir. 1. Histogram ve her yoğunluk düzeyi için olasılık hesaplanır. 2. Başlangıç ω i (0) ve μ i (0) değerleri hesaplanır. 3. Eşik değeri bir'den başlayarak maksimum yoğunluğa kadar a- ω i ve μ i değerleri hesaplanır. b- Sınıflar arası varyans değeri hesaplanır. 4. Maksimum sınıf içi eşik değerini veren eşik değeri aranılan değerdir. Şekil 3.13 de Otsu algoritmasının akış diyagramı verilmiştir. 25
37 4. UYGULAMA VE SONUÇLAR 4.1. Gündüz Alınan Görüntülerde Bulutluluk Analizi Havanın açık olduğu durumda, Rayleigh dağılımına göre gaz molekülleri tarafından mavi ışık kırmızı ışığa göre daha fazla saçılmaktadır (Chakraborti, 2007). Bu yüzden insan gözü hava açık olduğu zaman gökyüzünü mavi görmektedir. Bulutlar ise mavi ve kırmızının birbirine yakın düzeyde saçılmasını sağlar. Bu durum bulutların gri renkte görünmesine sebep olur (Petty vd., 2006). Bundan dolayı bulut tespiti yaparken mavinin kırmızıya oranı ya da mavi kırmızı değer farkı için eşik değeri belirlenmeye çalışılmıştır (Pfister vd., 2003) (Heinle vd., 2010). Yapılan çalışmada ise k-means kümeleme yöntemi ile görüntü bölütleme işlemi ile bulutlu ve açık gökyüzü ayırt edilmeye çalışılmıştır. Parçalı bulutlu görüntülerde yüksek oranda başarı elde edilmesine karşın, tam bulutlu ya da bazı tam açık görüntülerde istenilen sonuç alınamamıştır. Bu yüzden renk uzayı değerlerinden faydalanılarak görüntüler iki gruba ayrılmıştır. Gündüz görüntülerinin analizinde RGB, HSV, Lab gibi farklı renk uzayları ile çalışılmıştır. 26



38 Şekil Otsu algoritmasının akış diyagramı Güneş'in tespiti Örnek bir görüntü üzerinde HSV renk dağılımına bakıldığı zaman parlaklık değerinin 200'den büyük ve doygunluk değerinin 10'dan küçük olduğu bölüm Güneş olarak alınmıştır (Roy vd., 2008). Şekil 4.1 deki örnek görüntünün piksellerinin HSV renk uzayındaki dağılımı Şekil 4.2'de gösterilmiştir. Pikseller gökyüzü, bulut, ve güneş pikselleri olarak gösterilmiştir. 27
.")

39 Belirlenen parlaklık ve doygunluk değerleriyle Güneş tespit edildiğinde görüntüdeki diğer bazı piksellerin de Güneş'e aitmiş gibi algılandığı görülmüştür (Şekil 4.3). Bu pikselleri yok etmek ve aynı zamanda bulunacak güneş piksellerindeki çıkıntıları yok edebilmek için aşınma işlemi uygulanmıştır (Şekil 4. 4). Bu işlemle bütün parçacıklar kaldırılamadığından bağlantılı bileşenler etiketleme yöntemi yardımıyla görüntüdeki en büyük nesne güneş olarak kabul edilmiştir (Şekil 4.5). Son olarak Şekil 4.5'deki nesnedeki boşluğu doldurmak için morfolojik operatörlerden faydalanılarak Şekil 4.6'daki görüntü elde edilmiştir. İkili seviyedeki görüntü kullanılarak orijinal görüntüde Güneş işaretlenmiştir (Şekil 4.7). Şekil 4.1. Örnek tüm gökyüzü kamera görüntüsü ve bu görüntünün piksellerinin HSV uzayında dağılımı Şekil 4.2. Şekil 4.1'deki görüntünün piksellerinin HSV uzayında dağılımı 28

40 Şekil 4.3. Şekil 4.1 den HSV uzayında Güneş tespit edilen pikseller Şekil 4.4 Şekil 4.3 e aşınma işlemi uygulanarak elde edilen görüntü 29
41 Şekil 4.5. Şekil 4.4 deki görüntünün en büyük nesnesini gösteren görüntü Şekil 4.6. Şekil 4.5 deki nesnenin boşlukları doldurularak elde edilen görüntü 30


42 Şekil 4.7. Güneş işaretli görüntü K-means kümeleme yöntemi ile bulutluluk tespiti K-means yöntemi ile yapılan bulutluluk tespitinde parçalı bulutlu görüntülerde bulutların yüksek oranda doğrulukla tespit edildiği görülmüştür (Şekil 4.8). Görüntünün çalışma alanı içerisindeki piksellerinin Lab uzayındaki a ve b değerleri hesaplanmıştır. Bulunan a ve b değerleri k-means kümeleme işlemi ile ikiye ayrılarak bulutlu ve açık gökyüzü elde edilmiştir. Şekil 4.8. K-means kümeleme yöntemine örnek görüntü 31


43 4.1.3 RGB uzayı kullanılarak bulut tespiti K-means kümeleme yöntemi rengi iki farklı sınıfa ayırmaya çalışmaktadır. Bu yöntem Lab renk uzayında mavi rengi ayırırken başarılı olmaktadır. Görüntünün karlı ya da bulutlu havalarda tamamen beyaza yakın bir görünümde olmasından dolayı bu tip görüntülerde k- means kümeleme yöntemi ile istenilen sonuçlar alınamamıştır. Bu tip görüntülerde RGB renk uzayında R değeri ile B değerinin arasındaki fark bir eşik değeri ile ayrılarak bulutluluk tespiti yapılmıştır. Eşik değeri olarak 20 alınmıştır. Aynı şekilde gün batımında da gökyüzündeki mavi rengin değişiminden dolayı k-means yöntemi ile istenilen sonuç alınamamıştır. RGB uzayında daha iyi sonuç elde edilmiştir. Şekil 4.9'da RGB renk uzayında analiz yapılarak bulutluluk tespitine bir örnek verilmiştir. Şekil 4.9. R-B yöntemine örnek görüntü ve bunun bulut işaretli durumu İki yöntemden uygun olanın seçilmesi Kullanılan iki yöntem farklı durumlarda birbirlerine göre farklı oranlarda başarı göstermiştir. Bu yüzden iki durumu ayırt edecek bir algoritma geliştirilmeye çalışılmıştır. Bu algoritma için de renk uzaylarından faydalanılmıştır. Tam bulutlu ya da çok yüksek oranda bulutlu durumlarda HSV uzayında, çalışma alanındaki piksellerin ortalama doygunluk değerinin, rengin gri tonlara yaklaşmasından dolayı çok küçük çıktığı tespit edilmiştir. Bu yüzden ortalama doygunluk (S) değeri 10.5 in altında olan görüntüler RGB renk uzayı kullanılarak 32
44 analiz edilmiştir. Gün batımında alınan görüntülerde de RGB renk uzayı kullanıldığında daha başarılı sonuç elde edilmiştir. Bu durum için de LAB renk uzayında, çalışma alanındaki piksellerin ortalama L (parlaklık) değerinin 80 in altında olduğu görüntüler RGB renk uzayı altında analiz edilmiştir. Tablo 4.1 kullanılarak gündüzün farklı zamanlarında değişik bulut yoğunluklarında kullanılacak yöntem seçilmiştir. Tablo 4.1. Gündüz alınan görüntülerin analizinde kullanılan yöntem seçim tablosu KRİTER Ortalama S değeri < 10.5 Ortalama L değeri < 80 Diğer durumlar UYGULAMA RGB renk uzayında eşik değeri kullanımı RGB renk uzayında eşik değeri kullanımı K-means Yöntemi 4.2. Gece Alınan Görüntülerde Bulutluluk Analizi Gece alınan görüntülerin analizinde de iki yöntem denenmiştir. Birincisi gri seviyede analiz, diğeri ise k-means yöntemi ile analizdir. Ay'ın konumu ve parlaklığı, gri seviyede çalışıldığında görüntüye gri seviyede etki edebileceği için analizi çok fazla etkilemektedir. Ay'ın ortamı belirli bir seviyeden fazla aydınlattığı durumda k-means kümeleme yöntemi kullanılmıştır. Gri seviyede çalışırken batı tarafından şehir ışıklarının etkisi ve Ay'ın konumuna göre batı ve doğudan gelen ışık görüntünün sağ ve sol taraflarını aydınlatmaktadır. Bu etkiyi minimuma indirebilmek için maskeleme görüntüsü değiştirilerek çalışma alanı biraz küçültülmüştür. Gri seviyedeki görüntüden bulutluluk analizi yapılırken ilk önce görüntü tam açık ya da kapalı olarak ikiye ayrılmaya çalışılmıştır. Bu ayrımı yapmak için gri seviyeden ikili seviyeye geçiş işlemi yapılarak görüntüde oluşan ayrışık küçük nesnelerin sayısına bakılmıştır. Bu sayının 40'dan küçük olması durumunda görüntü tam kapalı gökyüzü, 100'ün üzerinde olması durumunda ise tam açık gökyüzü olarak değerlendirilmiştir. Diğer durumda ise bulutlu kısım tespit edilmeye çalışılmıştır. Bu işlemi yapmak için eşik değeri belirlenmesi gerekmektedir. Ortamdaki yıldızlar bu eşik değerinin belirlenmesine etki edeceği için ilk önce yıldızlar görüntüden kaldırılmaya çalışılmıştır ve bunun için morfolojik operatörlerden faydalanılmıştır. Bu iş için açınım operatörü kullanılmıştır. Daha sonra otomatik eşik 33

45 değeri belirlemek için Otsu metodu kullanılarak eşik değeri belirlenmiş ve ikili seviyedeki görüntü elde edilmiştir Karanlık gecede bulutluluk analizi Karanlık gecede ortam yeterince aydınlanmadığından renklerden faydalanılamamaktadır. Bu yüzden bulutluluk analizi görüntünün gri seviyedeki değerleri kullanılarak yapılmıştır. İlk önce görüntü tam açık gökyüzü ya da tam kapalı olarak ayrılmaya çalışılmıştır. Bunun için görüntünün RGB uzayındaki kırmızı bileşeni alınmıştır. Kırmızı bileşen daha sonra Otsu metodu ile ikili seviyeye çevrilmiştir (Şekil 4.10). İkili seviyedeki bu görüntüde bağlantılı bileşenler analizi uygulanmış ve toplam piksel sayısı 4 ile 12 arasındaki nesnelerin sayısı bulunmuştur. Bu sayı 40 dan küçük ise görüntü tam kapalı gökyüzü, 100 den büyük ise görüntü tam açık gökyüzü olarak değerlendirilmiştir. Diğer durumda ise görüntü üzerinde bulut belirlenmeye çalışılmıştır. Şekil 4.10 Açık gecede yıldızların etkisi Tam açık ya da tam kapalı gökyüzü olarak değerlendirilmeyen görüntülerde ilk olarak orijinal görüntünün R bileşeni alınmıştır. Şekil 4.11 ve 4.12'de sırasıyla orijinal görüntü ve görüntünün R bileşeni görülmektedir. 34

46 Şekil Orijinal görüntü Şekil Şekil 4.11 deki görüntünün R bileşeni R bileşeni üzerinde Otsu metodu ile bulutları tespit edebilmek için açınım işlemi yapılmıştır. (Şekil 4.13). Yani önce aşınma sonra genleşme işlemi yapılır. Her ne kadar görüntü orijinal halini kaybetse de orijinal görüntüye yakın bir şekilde bir sonraki adımı etkileyecek yıldız etkisi yok edilmeye çalışılmıştır. Şekil 4.13 üzerinde Otsu metodu uygulanarak bulutlu ve açık bölge şeklinde görüntü ikiye ayrılmıştır. İşaretlenen bulutlar Şekil 4.14'de görülmektedir. Karanlık gecede yapılan analizlerde batıdaki şehir ışıkları ve doğuda ve batıda oluşabilecek Ay ışığı eşik belirleme işlemini çok etkileyeceğinden maskeleme görüntüsü doğu ve batı tarafını daraltacak şekilde ayarlanmıştır. 35
47 Şekil Şekil 4.12 ye açınım işlemi uygulanarak elde edilen görüntü Şekil Şekil 4.11 deki görüntünün bulut işaretli durumu 36

. Bu yüzden bu adımlar gösterilmemiştir.")
48 4.2.2 Aydınlık gecede bulutluluk analizi Ay'ın tespiti Yapılan çalışmada Ay ın gökyüzündeki yeri tespit edilmiştir. Bunun için RGB renk uzayında B değerlerinin 200'den büyük olduğu değerler Ay olarak işaretlenmiştir. Güneş'in tespitinde olduğu gibi Ay tespitinde de morfolojik operatörlerden faydalanılmıştır. Verilen örnekte B bileşeni ile belirlenen parça, tek parça halinde ve içerisinde boşluklar olmayacak şekilde çıktığından morfolojik operatörlerle yapılan işlem Ay tespitini değiştirmemiştir (Şekil 4.15). Bu yüzden bu adımlar gösterilmemiştir. Ay ın ortamı çok fazla aydınlattığı durumlarda B değerlerinin 200'den büyük olduğu değerler ekranın büyük bir kısmını kapsadığından dolayı B değerinin 250'den büyük olduğu değerler Ay olarak hesaplanmıştır. Bunun için de görüntünün piksellerinin Lab uzayında ortalama L değeri alınmış ve bu değerin 150'den büyük olduğu durumlarda eşik değeri 250 olarak belirlenmiştir. Şekil Orijinal görüntü ve bunun Ay tespit edilmiş hali 37


49 K-means kümeleme yöntemi ile bulutluluk tespiti Ay'ın ortamı çok aydınlattığı gecelerde alınan görüntülerin analizinde k-means yöntemi kullanıldığında iyi sonuç alınmıştır. Şekil 4.16'da örnek bir görüntü ve k-means ile belirlenen bulutlar görülmektedir. Şekil K-means yöntemine örnek görüntü Gece alınan görüntülerde uygun yöntemin seçilmesi Gece alınan görüntülerde, görüntü ilk önce aydınlık ve karanlık olarak ikiye ayrılmıştır. Karanlık görüntülerde gri seviyede analiz, aydınlık görüntülerde ise renkli uzayda analiz yapılmıştır. İki farklı analiz yönteminden hangisinin kullanılacağını belirlemek için HSV uzayında çalışma alanının ortalama V değerine bakılmıştır. Karanlık gecelerde görüntü ilk önce tam kapalı gökyüzü ve tam açık gökyüzü olarak ayrılmaya çalışılmıştır. Bunun için görüntüdeki yıldızların etkisiyle oluşacak küçük nesnelerin sayısına bakılmıştır. Tam kapalı ya da tam açık gökyüzü görüntüsü olarak belirlenemeyen görüntülerde Otsu metodu kullanılarak bulutlu bölge belirlenmeye çalışılmıştır. Tablo 4.2'de uygulanan kriter ve yöntem gösterilmiştir. 38
50 Tablo 4.2. Gece alınan görüntülerin analizinde kullanılan yöntem seçim tablosu KRİTER YÖNTEM Küçük parçacık sayısı > 40 ve küçük parçacık sayısı < 100 ve Gri seviyede analiz Ortalama V değeri <= 11 Ortalama V değeri > 11 K-means yöntemi 4.3. Bulutluluk Oranı Hesabı Bulutluluk oranı çalışılan görüntüde bulut tespit edilmiş piksel sayısının, görüntünün çalışma alanındaki toplam piksel sayısından Güneş ya da Ay olarak tespit edilen piksel sayısının çıkartılması ile elde edilen sayıya oranı olarak hesaplanmıştır. bulut toplam güneşyadaay 4.1 Denklem 3.45'de bulut, toplam bulutlu piksel sayısı, toplam, çalışma alanındaki toplam piksel sayısı, güneşyadaay ise Gündüz Güneş gece ise Ay olarak tespit edilen piksel sayısıdır. 39
51 5. TARTIŞMA VE ÖNERİLER Bu çalışmada TUG'da kullanılmakta olan tüm gökyüzü kamera sisteminin görüntüleri kullanılarak bulutluluk analizi yapılması üzerine çalışılmıştır. Kamera sisteminin hava şartları dolayısıyla buğulanması, kırmızılaşması gibi durumlar ve kamera üzerindeki kar ve yağmur etkileri çalışma dışında tutulmuştur. Önceki bölümlerde anlatılan yöntemleri kullanan bir yazılım yapılmıştır. Bu yazılım TUG'da lisanslı olarak kullanılmakta olan IDL ile geliştirilmiştir. Yazılım kodları Ekler bölümünde verilmiştir. Bu yazılımla yapılan analizlerle ilgili örnekler Şekil 5.1, 5.2, 5.3 ve 5.4'de görülmektedir. Şekil 5.1 ve Şekil 5.2 gündüz görüntüleri üzerinde yapılan analizlere, Şekil 5.3 ve Şekil 5.4 ise gece görüntüleri üzerinde yapılan analizlere örnek olarak verilmiştir. Şekillerde görüntüler soldan sağa orijinal görüntü ve bulut işaretli görüntü olacak şekilde dizilmiştir. Bulut işaretli görüntülerde kırmızı renk Ay ya da Güneş, siyah renk k-means yöntemi ile tespit edilen bulut, beyaz ise karanlık gecede analizle ya da R-B yöntemi ile tespit edilen bulutu göstermektedir. Görüntü hiç değişmemişse tam açık, tamamen beyazla kaplı ise tam kapalı olarak sınıflandırılmıştır. Gündüz yapılan analizlerde Güneş in çevresinde bulut olarak algılanmaktadır. Tam açık gökyüzü olan görüntülerde öğlen vaktinde Güneşin bu etkisi çok belli olmaktadır. Şekil 5.1 de en alt sıradaki görüntüler buna örnektir. Gün batımına doğru alınan bazı görüntülerde de açık gökyüzü, bulut gibi algılanmıştır. R-B yöntemi hem tam kapalı gökyüzüne ait hem de gün batımına yaklaşılan zamana ait olan görüntüler için uygulanmıştır. İki ayrı durum için ayrı eşik değerleri alınmasının sistemin performansını arttıracağı düşünülmektedir. Şekil 5.2'deki ilk görüntü bu duruma bir örnektir. Gece görüntüleri için yapılan analizde, Ay'ın etkisinin Güneş etkisine benzer olduğu söylenebilir. Şekil 5.4' deki ilk görüntü buna bir örnektir. 40



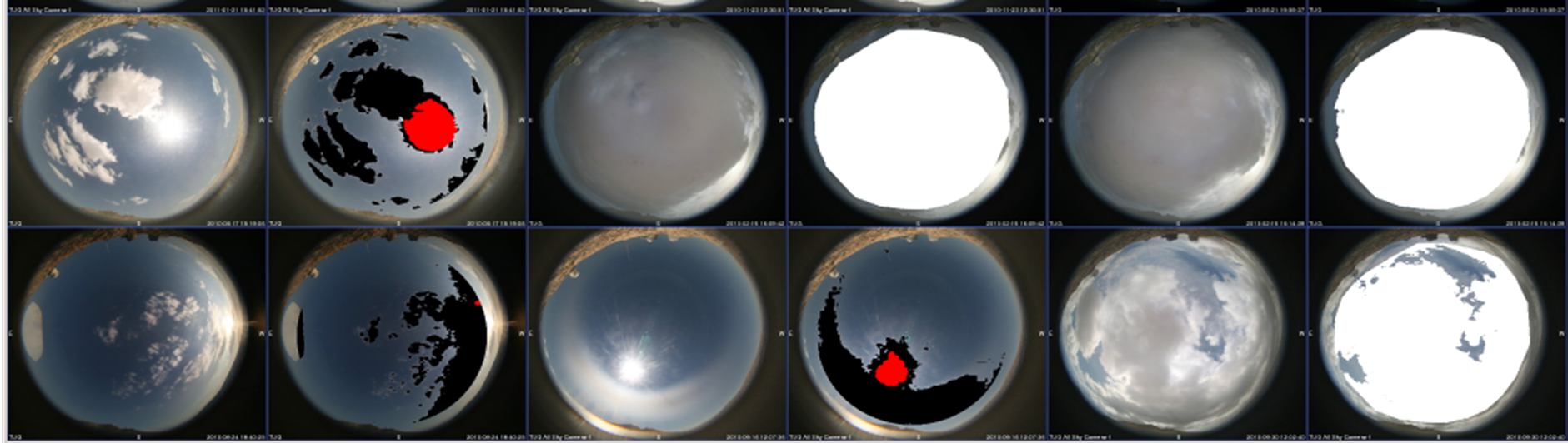
52 Şekil 5.1. Gündüz görüntüleri üzerinde yapılan analiz *Önce orijinal görüntü, hemen yanında bulut işaretlenmiş görüntü verilmiştir. Şekil 5.2. Gündüz görüntüleri üzerinde yapılan analiz *Önce orijinal görüntü, hemen yanında bulut işaretlenmiş görüntü verilmiştir. 41


53 Şekil 5.3. Gece görüntüleri üzerinde yapılan analiz *Önce orijinal görüntü, hemen yanında bulut işaretlenmiş görüntü verilmiştir Şekil 5.4. Gece görüntüleri üzerinde yapılan analiz *Önce orijinal görüntü, hemen yanında bulut işaretlenmiş görüntü verilmiştir Çalışmada gündüz ve gece bulutluluk tespiti için değişik yöntemler denenmiştir. K-means kümeleme yöntemi ile parçalı bulutlu görüntülerle iyi sonuçlar alındığı görülmüştür. RGB renk uzayında ise çok bulutlu ve gün batımındaki görüntülerde daha iyi sonuç alınmıştır. Farklı yöntemleri birleştirerek bulut tespit başarısının daha yükseltilebileceği görülmüştür. HSV ve LAB renk uzaylarından faydalanılarak uygulanacak yöntemlere göre görüntüler ayrılmaya çalışılmıştır. Renk uzaylarının bir değerini kullanmak yerine daha fazla 42

54 değişkenle ve veriyle modelleme yapmak yöntem seçim algoritmasını güçlendirecektir. Güneş'in ve Ay'ın görüntüde belirlenmesindeki görüntü işlem uygulamalarında sıkıntılar görülmüştür. Görüntünün üzerinde Güneş ve Ay çevresindeki yansımalar ve parlamalar tespiti zorlaştırmaktadır. Literatürdeki bazı tüm gökyüzü kamerası çalışmalarında Şekil 5.5'deki gibi bu etkileri azaltıcı önlemler alınmıştır (Linfoot vd, 2008). Şekil 5.5. Güneş ve ay yansıma engelleyici Çalışmanın sonraki aşamasında astronomi verilerinden faydalanarak uygulamada kullanılan algoritmaların güçlendirilmesi düşünülmektedir. Güneş'in ve Ay'ın görüntü üzerinde olması gereken yerin belirlenmesi, yansıma ve parlama gibi gürültülerin anlaşılmasını ve yok edilmesini kolaylaştıracaktır. Aynı zamanda karanlık gece ve aydınlık gecenin belirlenmesi için çalışmada kullanılan algoritmalarıda güçlendirecektir. Aynı zamanda gece ve gündüz görüntülerinin ayırt edilerek gece ve gündüz analizinin birleştirilip tam otomatik bir sistem oluşturulması mümkün olacaktır. 43
Bölüm 7 Renkli Görüntü İşleme
 BLM429 Görüntü İşlemeye Giriş Bölüm 7 Renkli Görüntü İşleme Dr. Öğr. Üyesi Caner ÖZCAN Genç sanatçının, rengin sadece tanımlayıcı değil aynı zamanda kişisel ifade anlamına geldiğini anlaması renge dokunmasından
BLM429 Görüntü İşlemeye Giriş Bölüm 7 Renkli Görüntü İşleme Dr. Öğr. Üyesi Caner ÖZCAN Genç sanatçının, rengin sadece tanımlayıcı değil aynı zamanda kişisel ifade anlamına geldiğini anlaması renge dokunmasından
Morfolojik Görüntü İşleme Yöntemleri ile Kayısılarda Yaprak Delen (Çil) Hastalığı Sonucu Oluşan Lekelerin Tespiti
 Hastalığı Sonucu Oluşan Lekelerin Tespiti") 6 th International Advanced Technologies Symposium (IATS 11), 16-18 May 011, Elazığ, Turkey Morfolojik Görüntü İşleme Yöntemleri ile Kayısılarda Yaprak Delen (Çil) Hastalığı Sonucu Oluşan Lekelerin Tespiti
6 th International Advanced Technologies Symposium (IATS 11), 16-18 May 011, Elazığ, Turkey Morfolojik Görüntü İşleme Yöntemleri ile Kayısılarda Yaprak Delen (Çil) Hastalığı Sonucu Oluşan Lekelerin Tespiti
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Final
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
İkili (Binary) Görüntü Analizi
 Görüntü Analizi") İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Kümeleme İşlemleri Kümeleme Tanımı Kümeleme Uygulamaları Kümeleme Yöntemleri Kümeleme (Clustering) Kümeleme birbirine
VERİ MADENCİLİĞİ (Kümeleme) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Kümeleme İşlemleri Kümeleme Tanımı Kümeleme Uygulamaları Kümeleme Yöntemleri Kümeleme (Clustering) Kümeleme birbirine
Görüntü İşleme. K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI. Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003
 Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
İkili (Binary) Görüntü Analizi
 Görüntü Analizi") İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
İkili (Binary) Görüntü Analizi İkili görüntü analizine giriş Eşikleme (Thresholding) Matematiksel morfoloji Piksel ve komşulukları (neighborhoods) Bağlantılı bileşenler analizi (Connected components analysis)
MMT 106 Teknik Fotoğrafçılık 3 Digital Görüntüleme
 MMT 106 Teknik Fotoğrafçılık 3 Digital Görüntüleme 2010-2011 Bahar Yarıyılı Ar. Gör. Dr. Ersoy Erişir 1 Konvansiyonel Görüntüleme (Fotografi) 2 Görüntü Tasarımı 3 Digital Görüntüleme 3.1 Renkler 3.2.1
MMT 106 Teknik Fotoğrafçılık 3 Digital Görüntüleme 2010-2011 Bahar Yarıyılı Ar. Gör. Dr. Ersoy Erişir 1 Konvansiyonel Görüntüleme (Fotografi) 2 Görüntü Tasarımı 3 Digital Görüntüleme 3.1 Renkler 3.2.1
Web Madenciliği (Web Mining)
") Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimsiz Öğrenmenin Temelleri Kümeleme Uzaklık Fonksiyonları Öklid Uzaklığı Manhattan
Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimsiz Öğrenmenin Temelleri Kümeleme Uzaklık Fonksiyonları Öklid Uzaklığı Manhattan
Görüntü İşleme. Dijital Görüntü Tanımları. Dijital görüntü ise sayısal değerlerden oluşur.
 Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
Görüntü İyileştirme Teknikleri. Hafta-8
 Görüntü İyileştirme Teknikleri Hafta-8 1 Spektral İyileştirme PCA (Principal Component Analysis) Dönüşümü. Türkçesi Ana Bileşenler Dönüşümü Decorrelation Germe Tasseled Cap RGB den IHS ye dönüşüm IHS den
Görüntü İyileştirme Teknikleri Hafta-8 1 Spektral İyileştirme PCA (Principal Component Analysis) Dönüşümü. Türkçesi Ana Bileşenler Dönüşümü Decorrelation Germe Tasseled Cap RGB den IHS ye dönüşüm IHS den
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme
 BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
LED IŞIK KAYNAKLARININ RENK SICAKLIĞININ GÖRÜNTÜ İŞLEME TEKNİKLERİ KULLANILARAK BELİRLENMESİ. İsmail Serkan Üncü, İsmail Taşcı
 LED IŞIK KAYNAKLARININ RENK SICAKLIĞININ GÖRÜNTÜ İŞLEME TEKNİKLERİ KULLANILARAK BELİRLENMESİ İsmail Serkan Üncü, İsmail Taşcı To The Sources Of Light s Color Tempature With Image Processing Techniques
LED IŞIK KAYNAKLARININ RENK SICAKLIĞININ GÖRÜNTÜ İŞLEME TEKNİKLERİ KULLANILARAK BELİRLENMESİ İsmail Serkan Üncü, İsmail Taşcı To The Sources Of Light s Color Tempature With Image Processing Techniques
Görüntü Segmentasyonu (Bölütleme)
") Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 20 Aralık 2014 Cumartesi 1 Görüntü Segmentasyonu 20 Aralık 2014 Cumartesi 2 Gestalt kanunları Görüntü
Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 20 Aralık 2014 Cumartesi 1 Görüntü Segmentasyonu 20 Aralık 2014 Cumartesi 2 Gestalt kanunları Görüntü
DİJİTAL GÖRÜNTÜ İŞLEME
 DİJİTAL GÖRÜNTÜ İŞLEME Prof. Dr. Oğuz Güngör Karadeniz Teknik Üniversitesi Jeodezi ve Fotogrametri Mühendisliği Bölümü 61080 Trabzon ogungor@ktu.edu.tr 1 Renk Nedir? 2 En basit anlamıyla renk maddelerden
DİJİTAL GÖRÜNTÜ İŞLEME Prof. Dr. Oğuz Güngör Karadeniz Teknik Üniversitesi Jeodezi ve Fotogrametri Mühendisliği Bölümü 61080 Trabzon ogungor@ktu.edu.tr 1 Renk Nedir? 2 En basit anlamıyla renk maddelerden
İMGE İŞLEME Ders-7. Morfolojik İmge İşleme. Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm. (Yrd. Doç. Dr. M.
 İMGE İŞLEME Ders-7 Morfolojik İmge İşleme (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ Morfoloji Biyolojinin canlıların
İMGE İŞLEME Ders-7 Morfolojik İmge İşleme (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ Morfoloji Biyolojinin canlıların
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ
 GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
YZM 3217 YAPAY ZEKA DERS#10: KÜMELEME
 YZM 317 YAPAY ZEKA DERS#10: KÜMELEME Sınıflandırma (Classification) Eğiticili (supervised) sınıflandırma: Sınıflandırma: Sınıf sayısı ve bir grup örneğin hangi sınıfa ait olduğunu bilinir Eğiticisiz (unsupervised)
YZM 317 YAPAY ZEKA DERS#10: KÜMELEME Sınıflandırma (Classification) Eğiticili (supervised) sınıflandırma: Sınıflandırma: Sınıf sayısı ve bir grup örneğin hangi sınıfa ait olduğunu bilinir Eğiticisiz (unsupervised)
Uzaktan Algılama Uygulamaları
 Aksaray Üniversitesi Uzaktan Algılama Uygulamaları Doç.Dr. Semih EKERCİN Harita Mühendisliği Bölümü sekercin@aksaray.edu.tr 2010-2011 Bahar Yarıyılı Uzaktan Algılama Uygulamaları GÖRÜNTÜ İŞLEME TEKNİKLERİ
Aksaray Üniversitesi Uzaktan Algılama Uygulamaları Doç.Dr. Semih EKERCİN Harita Mühendisliği Bölümü sekercin@aksaray.edu.tr 2010-2011 Bahar Yarıyılı Uzaktan Algılama Uygulamaları GÖRÜNTÜ İŞLEME TEKNİKLERİ
5 İki Boyutlu Algılayıcılar
 65 5 İki Boyutlu Algılayıcılar 5.1 CCD Satır Kameralar Ölçülecek büyüklük, örneğin bir telin çapı, objeye uygun bir projeksiyon ile CCD satırının ışığa duyarlı elemanı üzerine düşürülerek ölçüm yapılır.
65 5 İki Boyutlu Algılayıcılar 5.1 CCD Satır Kameralar Ölçülecek büyüklük, örneğin bir telin çapı, objeye uygun bir projeksiyon ile CCD satırının ışığa duyarlı elemanı üzerine düşürülerek ölçüm yapılır.
İÇİNDEKİLER ÖNSÖZ Bölüm 1 KÜMELER Bölüm 2 SAYILAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
Bilgisayarla Fotogrametrik Görme
 Bilgisayarla Fotogrametrik Görme Dijital Görüntü ve Özellikleri Yrd. Doç. Dr. Mustafa DİHKAN 1 Dijital görüntü ve özellikleri Siyah-beyaz resimler için değer elemanları 0-255 arasındadır. 256 farklı durum
Bilgisayarla Fotogrametrik Görme Dijital Görüntü ve Özellikleri Yrd. Doç. Dr. Mustafa DİHKAN 1 Dijital görüntü ve özellikleri Siyah-beyaz resimler için değer elemanları 0-255 arasındadır. 256 farklı durum
Kümeler arası. Küme içi. uzaklıklar. maksimize edilir. minimize edilir
 Kümeleme Analizi: Temel Kavramlar ve Algoritmalar Kümeleme Analizi Nedir? Her biri bir dizi öznitelik ile, veri noktalarının bir kümesi ve noktalar arasındaki benzerliği ölçen bir benzerlik ölçümü verilmiş
Kümeleme Analizi: Temel Kavramlar ve Algoritmalar Kümeleme Analizi Nedir? Her biri bir dizi öznitelik ile, veri noktalarının bir kümesi ve noktalar arasındaki benzerliği ölçen bir benzerlik ölçümü verilmiş
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Proje
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Proje Renk ve Şekil Temelli Trafik İşareti Tespiti Selçuk BAŞAK 08501008 1. Not: Ödevi hazırlamak için
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Proje Renk ve Şekil Temelli Trafik İşareti Tespiti Selçuk BAŞAK 08501008 1. Not: Ödevi hazırlamak için
TMMOB Harita ve Kadastro Mühendisleri Odası Ulusal Coğrafi Bilgi Sistemleri Kongresi 30 Ekim 02 Kasım 2007, KTÜ, Trabzon
 TMMOB Harita ve Kadastro Mühendisleri Odası Ulusal Coğrafi Bilgi Sistemleri Kongresi 30 Ekim 02 Kasım 2007, KTÜ, Trabzon Lazer Tarama Verilerinden Bina Detaylarının Çıkarılması ve CBS İle Entegrasyonu
TMMOB Harita ve Kadastro Mühendisleri Odası Ulusal Coğrafi Bilgi Sistemleri Kongresi 30 Ekim 02 Kasım 2007, KTÜ, Trabzon Lazer Tarama Verilerinden Bina Detaylarının Çıkarılması ve CBS İle Entegrasyonu
Makine Öğrenmesi 2. hafta
 Makine Öğrenmesi 2. hafta Uzaklığa dayalı gruplandırma K-means kümeleme K-NN sınıflayıcı 1 Uzaklığa dayalı gruplandırma Makine öğrenmesinde amaç birbirine en çok benzeyen veri noktalarını aynı grup içerisinde
Makine Öğrenmesi 2. hafta Uzaklığa dayalı gruplandırma K-means kümeleme K-NN sınıflayıcı 1 Uzaklığa dayalı gruplandırma Makine öğrenmesinde amaç birbirine en çok benzeyen veri noktalarını aynı grup içerisinde
MOD419 Görüntü İşleme
 MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
VERİ MADENCİLİĞİ (Veri Ön İşleme-2) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Veri Ön İşleme-2) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr Genel İçerik Veri Madenciliğine Giriş Veri Madenciliğinin Adımları Veri Madenciliği Yöntemleri Sınıflandırma Kümeleme
VERİ MADENCİLİĞİ (Veri Ön İşleme-2) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr Genel İçerik Veri Madenciliğine Giriş Veri Madenciliğinin Adımları Veri Madenciliği Yöntemleri Sınıflandırma Kümeleme
GÖRÜNTÜSÜ ALINAN BİR NESNENİN REFERANS BİR NESNE YARDIMIYLA BOYUTLARININ, ALANININ VE AÇISININ HESAPLANMASI ÖZET ABSTRACT
 GÖRÜNTÜSÜ ALINAN BİR NESNENİN REFERANS BİR NESNE YARDIMIYLA BOYUTLARININ, ALANININ VE AÇISININ HESAPLANMASI Hüseyin GÜNEŞ 1, Alper BURMABIYIK 2, Semih KELEŞ 3, Davut AKDAŞ 4 1 hgunes@balikesir.edu.tr Balıkesir
GÖRÜNTÜSÜ ALINAN BİR NESNENİN REFERANS BİR NESNE YARDIMIYLA BOYUTLARININ, ALANININ VE AÇISININ HESAPLANMASI Hüseyin GÜNEŞ 1, Alper BURMABIYIK 2, Semih KELEŞ 3, Davut AKDAŞ 4 1 hgunes@balikesir.edu.tr Balıkesir
UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA
 UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında ucuz ve hızlı sonuç alınabilen uzaktan algılama tekniğinin, yenilenebilir
UYDU GÖRÜNTÜLERİ VE SAYISAL UZAKTAN ALGILAMA Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında ucuz ve hızlı sonuç alınabilen uzaktan algılama tekniğinin, yenilenebilir
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 4 İkili Görüntüler, Topoloji ve Morfoloji Alp Ertürk alp.erturk@kocaeli.edu.tr İkili (binary) görüntüler Gri skala veya renkli bir görüntünün eşiklenmesi ile elde edilirler.
Bilgisayarla Görüye Giriş Ders 4 İkili Görüntüler, Topoloji ve Morfoloji Alp Ertürk alp.erturk@kocaeli.edu.tr İkili (binary) görüntüler Gri skala veya renkli bir görüntünün eşiklenmesi ile elde edilirler.
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI. Yrd. Doç. Dr. Emre ATILGAN
 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Yrd. Doç. Dr. Emre ATILGAN 1 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Olasılığa ilişkin olayların çoğunluğunda, deneme sonuçlarının bir veya birkaç yönden incelenmesi
RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Yrd. Doç. Dr. Emre ATILGAN 1 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Olasılığa ilişkin olayların çoğunluğunda, deneme sonuçlarının bir veya birkaç yönden incelenmesi
Uzaktan Algılama Teknolojileri
 Uzaktan Algılama Teknolojileri Ders 8 Multispektral Görüntüleme ve Uygulamaları Alp Ertürk alp.erturk@kocaeli.edu.tr Multispektral Görüntüleme Her piksel için birkaç adet spektral kanalda ölçüm değeri
Uzaktan Algılama Teknolojileri Ders 8 Multispektral Görüntüleme ve Uygulamaları Alp Ertürk alp.erturk@kocaeli.edu.tr Multispektral Görüntüleme Her piksel için birkaç adet spektral kanalda ölçüm değeri
ULUSAL COĞRAFİ BILGİ SISTEMLERİ KONGRESİ 30 Ekim 02 Kasım 2007, KTÜ, Trabzon
 ULUSAL COĞRAFİ BILGİ SISTEMLERİ KONGRESİ 30 Ekim 02 Kasım 2007, KTÜ, Trabzon Uydu Verilerinin Farklı Yöntemlerle Karılması ve Sonuçların Karşılaştırılması Öğr. Gör. Bora UĞURLU Prof. Dr. Hülya YILDIRIM
ULUSAL COĞRAFİ BILGİ SISTEMLERİ KONGRESİ 30 Ekim 02 Kasım 2007, KTÜ, Trabzon Uydu Verilerinin Farklı Yöntemlerle Karılması ve Sonuçların Karşılaştırılması Öğr. Gör. Bora UĞURLU Prof. Dr. Hülya YILDIRIM
K En Yakın Komşu Methodu (KNearest Neighborhood)
") K En Yakın Komşu Methodu (KNearest Neighborhood) K-NN algoritması, Thomas. M. Cover ve Peter. E. Hart tarafından önerilen, örnek veri noktasının bulunduğu sınıfın ve en yakın komşunun, k değerine göre
K En Yakın Komşu Methodu (KNearest Neighborhood) K-NN algoritması, Thomas. M. Cover ve Peter. E. Hart tarafından önerilen, örnek veri noktasının bulunduğu sınıfın ve en yakın komşunun, k değerine göre
TÜRKİYE NİN BİTKİ ÖRTÜSÜ DEĞİŞİMİNİN NOAA UYDU VERİLERİ İLE BELİRLENMESİ*
 TÜRKİYE NİN BİTKİ ÖRTÜSÜ DEĞİŞİMİNİN NOAA UYDU VERİLERİ İLE BELİRLENMESİ* Determination the Variation of The Vegetation in Turkey by Using NOAA Satellite Data* Songül GÜNDEŞ Fizik Anabilim Dalı Vedat PEŞTEMALCI
TÜRKİYE NİN BİTKİ ÖRTÜSÜ DEĞİŞİMİNİN NOAA UYDU VERİLERİ İLE BELİRLENMESİ* Determination the Variation of The Vegetation in Turkey by Using NOAA Satellite Data* Songül GÜNDEŞ Fizik Anabilim Dalı Vedat PEŞTEMALCI
CCD KAMERA KULLANARAK SAYISAL GÖRÜNTÜ İŞLEME YOLUYLA GERÇEK ZAMANLI GÜVENLİK UYGULAMASI
 CCD KAMERA KULLANARAK SAYISAL GÖRÜNTÜ İŞLEME YOLUYLA GERÇEK ZAMANLI GÜVENLİK UYGULAMASI Serhan COŞAR serhancosar@yahoo.com Oğuzhan URHAN urhano@kou.edu.tr M. Kemal GÜLLÜ kemalg@kou.edu.tr İşaret ve Görüntü
CCD KAMERA KULLANARAK SAYISAL GÖRÜNTÜ İŞLEME YOLUYLA GERÇEK ZAMANLI GÜVENLİK UYGULAMASI Serhan COŞAR serhancosar@yahoo.com Oğuzhan URHAN urhano@kou.edu.tr M. Kemal GÜLLÜ kemalg@kou.edu.tr İşaret ve Görüntü
Tanımlayıcı İstatistikler. Yrd. Doç. Dr. Emre ATILGAN
 Tanımlayıcı İstatistikler Yrd. Doç. Dr. Emre ATILGAN 1 Tanımlayıcı İstatistikler Yer Gösteren Ölçüler Yaygınlık Ölçüleri Merkezi Eğilim Ölçüleri Konum Ölçüleri 2 3 Aritmetik Ortalama Aritmetik ortalama,
Tanımlayıcı İstatistikler Yrd. Doç. Dr. Emre ATILGAN 1 Tanımlayıcı İstatistikler Yer Gösteren Ölçüler Yaygınlık Ölçüleri Merkezi Eğilim Ölçüleri Konum Ölçüleri 2 3 Aritmetik Ortalama Aritmetik ortalama,
TANIMLAYICI İSTATİSTİKLER
 TANIMLAYICI İSTATİSTİKLER Tanımlayıcı İstatistikler ve Grafikle Gösterim Grafik ve bir ölçüde tablolar değişkenlerin görsel bir özetini verirler. İdeal olarak burada değişkenlerin merkezi (ortalama) değerlerinin
TANIMLAYICI İSTATİSTİKLER Tanımlayıcı İstatistikler ve Grafikle Gösterim Grafik ve bir ölçüde tablolar değişkenlerin görsel bir özetini verirler. İdeal olarak burada değişkenlerin merkezi (ortalama) değerlerinin
Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS
 DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Sayısal Görüntü İşleme BIL413 7 3+0 3 5 Ön Koşul Dersleri Yok Dersin Dili Dersin Seviyesi Dersin Türü Türkçe Lisans Seçmeli / Yüz Yüze
DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Sayısal Görüntü İşleme BIL413 7 3+0 3 5 Ön Koşul Dersleri Yok Dersin Dili Dersin Seviyesi Dersin Türü Türkçe Lisans Seçmeli / Yüz Yüze
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
Görüntü Segmentasyonu (Bölütleme) Dijital Görüntü İşleme Fevzi Karslı, KTÜ Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır.
 Dijital Görüntü İşleme Fevzi Karslı, KTÜ Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır.") Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 16 Ocak 2014 Perşembe 1 Görüntü Segmentasyonu 16 Ocak 2014 Perşembe 2 Görüntüden Objelere Bir objeyi
Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 16 Ocak 2014 Perşembe 1 Görüntü Segmentasyonu 16 Ocak 2014 Perşembe 2 Görüntüden Objelere Bir objeyi
Sahne Geçişlerinin Geometrik Tabanlı olarak Saptanması
 Sahne Geçişlerinin Geometrik Tabanlı olarak Saptanması 1 Giriş Binnur Kurt, H. Tahsin Demiral, Muhittin Gökmen İstanbul Teknik Üniversitesi, Bilgisayar Mühendisliği Bölümü, Maslak, 80626 İstanbul {kurt,demiral,gokmen}@cs.itu.edu.tr
Sahne Geçişlerinin Geometrik Tabanlı olarak Saptanması 1 Giriş Binnur Kurt, H. Tahsin Demiral, Muhittin Gökmen İstanbul Teknik Üniversitesi, Bilgisayar Mühendisliği Bölümü, Maslak, 80626 İstanbul {kurt,demiral,gokmen}@cs.itu.edu.tr
Esnek Hesaplamaya Giriş
 Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
RENK BİLEŞENLERİ YARDIMIYLA HAREKETLİ HEDEFLERİN GERÇEK ZAMANLI TESPİTİ
 Journal of Naval Science and Engineering 2009, Vol 5, No2, pp 89-97 RENK BİLEŞENLERİ YARDIMIYLA HAREKETLİ HEDEFLERİN GERÇEK ZAMANLI TESPİTİ Öğr Kd Bnb Mustafa Yağımlı Elektrik/Elektronik Mühendisliği Bölümü,
Journal of Naval Science and Engineering 2009, Vol 5, No2, pp 89-97 RENK BİLEŞENLERİ YARDIMIYLA HAREKETLİ HEDEFLERİN GERÇEK ZAMANLI TESPİTİ Öğr Kd Bnb Mustafa Yağımlı Elektrik/Elektronik Mühendisliği Bölümü,
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Vize. İris Segmentation. Selçuk BAŞAK 08501008
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Vize İris Segmentation Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim program ve kaynak
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Vize İris Segmentation Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim program ve kaynak
Hafta 12 Morfolojik Görüntü İşleme
 BLM429 Görüntü İşlemeye Giriş Hafta 12 Morfolojik Görüntü İşleme Yrd. Doç. Dr. Caner ÖZCAN Biçim ve özellik, yüz ve dudak.. Tıpkı kardeşim gibi büyüdüm.. Benzerliklerimiz sanki beni o yaptı.. Ve birimiz
BLM429 Görüntü İşlemeye Giriş Hafta 12 Morfolojik Görüntü İşleme Yrd. Doç. Dr. Caner ÖZCAN Biçim ve özellik, yüz ve dudak.. Tıpkı kardeşim gibi büyüdüm.. Benzerliklerimiz sanki beni o yaptı.. Ve birimiz
VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Sınıflandırma yöntemleri Karar ağaçları ile sınıflandırma Entropi Kavramı ID3 Algoritması C4.5
VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr İçerik Sınıflandırma yöntemleri Karar ağaçları ile sınıflandırma Entropi Kavramı ID3 Algoritması C4.5
 Grafik Dosya Formatları Grafik dosya formatları, grafik boyutlarını düşürmek amacıyla geliştirilen matematiksel algoritmalardır. Çeşitli amaçlara yönelik olarak kullanılan birçok grafik dosya formatı vardır.
Grafik Dosya Formatları Grafik dosya formatları, grafik boyutlarını düşürmek amacıyla geliştirilen matematiksel algoritmalardır. Çeşitli amaçlara yönelik olarak kullanılan birçok grafik dosya formatı vardır.
VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN
 Yrd.Doç.Dr. Kadriye ERGÜN") VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr Genel İçerik Veri Madenciliğine Giriş Veri Madenciliğinin Adımları Veri Madenciliği Yöntemleri Sınıflandırma
VERİ MADENCİLİĞİ (Karar Ağaçları ile Sınıflandırma) Yrd.Doç.Dr. Kadriye ERGÜN kergun@balikesir.edu.tr Genel İçerik Veri Madenciliğine Giriş Veri Madenciliğinin Adımları Veri Madenciliği Yöntemleri Sınıflandırma
Web Madenciliği (Web Mining)
") Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimli Öğrenmenin Temelleri Karar Ağaçları Entropi ID3 Algoritması C4.5 Algoritması Twoing
Web Madenciliği (Web Mining) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Denetimli Öğrenmenin Temelleri Karar Ağaçları Entropi ID3 Algoritması C4.5 Algoritması Twoing
2- Kontrol Sil... 17. 3-En Öne Getir... 13 4-En Arkaya Gönder... 13 4.5.8.2 Resim... 14. 1-Özellikler:... 18 Genel Özellikler...
 i İçindekiler Kullanıcı Giriş Ekranı... 1 Ana Sayfa... 2 1-Projeler... 3 1.1 Yeni Proje... 3 1.2 Proje Düzenle... 3 1.3 Proje Sil... 3 1.4 Listeyi Güncelle.... 3 2-Gruplar... 4 2.1.1 Grup Adı.... 5 2.1.2
i İçindekiler Kullanıcı Giriş Ekranı... 1 Ana Sayfa... 2 1-Projeler... 3 1.1 Yeni Proje... 3 1.2 Proje Düzenle... 3 1.3 Proje Sil... 3 1.4 Listeyi Güncelle.... 3 2-Gruplar... 4 2.1.1 Grup Adı.... 5 2.1.2
AMAÇ Araçlardaki Kamera Sistemleri
 SUNU PLANI AMAÇ OPEN CV GÖRÜNTÜ EŞİKLEME KENAR BULMA ŞEKİL BULMA GÖRÜNTÜ GENİŞLETME VE BOZMA GÖRÜNTÜ DOLDURMA AFFİNE DÖNÜŞÜMÜ PERSPEKTİF DÖNÜŞÜM KUŞ BAKIŞI GÖRÜNTÜ DÖNÜŞÜMÜ AMAÇ Araçlardaki Kamera Sistemleri
SUNU PLANI AMAÇ OPEN CV GÖRÜNTÜ EŞİKLEME KENAR BULMA ŞEKİL BULMA GÖRÜNTÜ GENİŞLETME VE BOZMA GÖRÜNTÜ DOLDURMA AFFİNE DÖNÜŞÜMÜ PERSPEKTİF DÖNÜŞÜM KUŞ BAKIŞI GÖRÜNTÜ DÖNÜŞÜMÜ AMAÇ Araçlardaki Kamera Sistemleri
Fonksiyon Optimizasyonunda Genetik Algoritmalar
 01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1. Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı
 BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1 Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı Mart 2015 0 SORU 1) Bulanık Küme nedir? Bulanık Kümenin (fuzzy
BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1 Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı Mart 2015 0 SORU 1) Bulanık Küme nedir? Bulanık Kümenin (fuzzy
Yrd. Doç. Dr. Caner ÖZCAN
 Yrd. Doç. Dr. Caner ÖZCAN Grafik Programlama Bilgisayar kullanılırken monitörlerde iki tür ekran moduyla karşılaşılır. Bu ekran modları Text modu ve Grafik modu dur. Text modunda ekran 25 satır ve 80 sütundan
Yrd. Doç. Dr. Caner ÖZCAN Grafik Programlama Bilgisayar kullanılırken monitörlerde iki tür ekran moduyla karşılaşılır. Bu ekran modları Text modu ve Grafik modu dur. Text modunda ekran 25 satır ve 80 sütundan
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ 2018/2019 GYY BİTİRME ÇALIŞMASI ÖNERİ FORMU. (Doç.Dr. M.
 KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ 2018/2019 GYY BİTİRME ÇALIŞMASI ÖNERİ FORMU (Doç.Dr. M. Kemal GÜLLÜ) Derinlik kamerası ile alınan modellerin birleştirilmesi Derinlik kamerası,
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ 2018/2019 GYY BİTİRME ÇALIŞMASI ÖNERİ FORMU (Doç.Dr. M. Kemal GÜLLÜ) Derinlik kamerası ile alınan modellerin birleştirilmesi Derinlik kamerası,
Büyük Veri İçin İstatistiksel Öğrenme (Statistical Learning for Big Data)
") Büyük Veri İçin İstatistiksel Öğrenme (Statistical Learning for Big Data) M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, The Elements of Statistical Learning: Data
Büyük Veri İçin İstatistiksel Öğrenme (Statistical Learning for Big Data) M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, The Elements of Statistical Learning: Data
GÖRÜNTÜ İŞLEME - (8.Hafta) RESMİ ALT BÖLGELERE AYIRMA
 RESMİ ALT BÖLGELERE AYIRMA") GÖRÜNTÜ İŞLEME - (8.Hafta) RESMİ ALT BÖLGELERE AYIRMA BAĞLANTILI BİLEŞEN ETİKETLEME (Çift Geçiş Metodu) Bir resim üzerindeki aynı renk koduna sahip bölgelerin ortaya çıkarılması, birbirinden ayrılması
GÖRÜNTÜ İŞLEME - (8.Hafta) RESMİ ALT BÖLGELERE AYIRMA BAĞLANTILI BİLEŞEN ETİKETLEME (Çift Geçiş Metodu) Bir resim üzerindeki aynı renk koduna sahip bölgelerin ortaya çıkarılması, birbirinden ayrılması
1. BÖLÜM Mantık BÖLÜM Sayılar BÖLÜM Rasyonel Sayılar BÖLÜM I. Dereceden Denklemler ve Eşitsizlikler
 ORGANİZASYON ŞEMASI 1. BÖLÜM Mantık... 7. BÖLÜM Sayılar... 13 3. BÖLÜM Rasyonel Sayılar... 93 4. BÖLÜM I. Dereceden Denklemler ve Eşitsizlikler... 103 5. BÖLÜM Mutlak Değer... 113 6. BÖLÜM Çarpanlara Ayırma...
ORGANİZASYON ŞEMASI 1. BÖLÜM Mantık... 7. BÖLÜM Sayılar... 13 3. BÖLÜM Rasyonel Sayılar... 93 4. BÖLÜM I. Dereceden Denklemler ve Eşitsizlikler... 103 5. BÖLÜM Mutlak Değer... 113 6. BÖLÜM Çarpanlara Ayırma...
Bilgisayar ne elde eder (görüntüden)? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51
? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51") Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Sunum ve Sistematik 1. BÖLÜM: ÖNERMELER
 Sunum ve Sistematik. ÜNİTE: MANTIK KONU ÖZETİ Bu başlık altında, ünitenin en can alıcı bilgileri, kazanım sırasına göre en alt başlıklara ayrılarak hap bilgi niteliğinde konu özeti olarak sunulmuştur..
Sunum ve Sistematik. ÜNİTE: MANTIK KONU ÖZETİ Bu başlık altında, ünitenin en can alıcı bilgileri, kazanım sırasına göre en alt başlıklara ayrılarak hap bilgi niteliğinde konu özeti olarak sunulmuştur..
GÖRÜNTÜLERİN RENK UZAYI YARDIMIYLA AYRIŞTIRILMASI SEGMENTATION OF IMAGES WITH COLOR SPACE
 İleri Teknoloji Bilimleri Dergisi Cilt 3, Sayı 1, 1-8, 2014 Journal of Advanced Technology Sciences Vol 3, No 1, 1-8, 2014 GÖRÜNTÜLERİN RENK UZAYI YARDIMIYLA AYRIŞTIRILMASI Recep DEMİRCİ 1 Uğur GÜVENÇ
İleri Teknoloji Bilimleri Dergisi Cilt 3, Sayı 1, 1-8, 2014 Journal of Advanced Technology Sciences Vol 3, No 1, 1-8, 2014 GÖRÜNTÜLERİN RENK UZAYI YARDIMIYLA AYRIŞTIRILMASI Recep DEMİRCİ 1 Uğur GÜVENÇ
TEMEL İSTATİSTİKİ KAVRAMLAR YRD. DOÇ. DR. İBRAHİM ÇÜTCÜ
 TEMEL İSTATİSTİKİ KAVRAMLAR YRD. DOÇ. DR. İBRAHİM ÇÜTCÜ 1 İstatistik İstatistik, belirsizliğin veya eksik bilginin söz konusu olduğu durumlarda çıkarımlar yapmak ve karar vermek için sayısal verilerin
TEMEL İSTATİSTİKİ KAVRAMLAR YRD. DOÇ. DR. İBRAHİM ÇÜTCÜ 1 İstatistik İstatistik, belirsizliğin veya eksik bilginin söz konusu olduğu durumlarda çıkarımlar yapmak ve karar vermek için sayısal verilerin
Uzaktan Algılama Teknolojileri
 Uzaktan Algılama Teknolojileri Ders 11 Hiperspektral Görüntülerde Kümeleme ve Sınıflandırma Alp Ertürk alp.erturk@kocaeli.edu.tr Sınıflandırma Sınıflandırma işleminin amacı, her piksel vektörüne bir ve
Uzaktan Algılama Teknolojileri Ders 11 Hiperspektral Görüntülerde Kümeleme ve Sınıflandırma Alp Ertürk alp.erturk@kocaeli.edu.tr Sınıflandırma Sınıflandırma işleminin amacı, her piksel vektörüne bir ve
Gama ışını görüntüleme: X ışını görüntüleme:
 Elektronik ve Hab. Müh. Giriş Dersi Görüntü İşleme Yrd. Doç. Dr. M. Kemal GÜLLÜ Uygulama Alanları Gama ışını görüntüleme: X ışını görüntüleme: Uygulama Alanları Mor ötesi bandı görüntüleme: Görünür ve
Elektronik ve Hab. Müh. Giriş Dersi Görüntü İşleme Yrd. Doç. Dr. M. Kemal GÜLLÜ Uygulama Alanları Gama ışını görüntüleme: X ışını görüntüleme: Uygulama Alanları Mor ötesi bandı görüntüleme: Görünür ve
Tanımlar, Geometrik ve Matemetiksel Temeller. Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ. JDF329 Fotogrametri I Ders Notu
 FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
FOTOGRAMETRİ I Tanımlar, Geometrik ve Matemetiksel Temeller Yrd. Doç. Dr. Saygın ABDİKAN Yrd. Doç. Dr. Aycan M. MARANGOZ JDF329 Fotogrametri I Ders Notu 2015-2016 Öğretim Yılı Güz Dönemi İçerik Tanımlar
İstatistik ve Olasılık
 İstatistik ve Olasılık Ders 8: Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır. Bu anlamda, anakütleden çekilen
İstatistik ve Olasılık Ders 8: Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır. Bu anlamda, anakütleden çekilen
TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun.
 Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
PARÇACIK SÜRÜ OPTİMİZASYONU (PSO) YÖNTEMİ İLE KIYI ÇİZGİSİ ÇIKARTILMASI: ERÇEK GÖLÜ ÖRNEĞİ
 YÖNTEMİ İLE KIYI ÇİZGİSİ ÇIKARTILMASI: ERÇEK GÖLÜ ÖRNEĞİ") 790 [1028] PARÇACIK SÜRÜ OPTİMİZASYONU (PSO) YÖNTEMİ İLE KIYI ÇİZGİSİ ÇIKARTILMASI: ERÇEK GÖLÜ ÖRNEĞİ Hatice ÇATAL REİS 1, Bülent BAYRAM 2 1 Dr., Gümüşhane Üniversitesi, Harita Mühendisliği Bölümü, 29100,
790 [1028] PARÇACIK SÜRÜ OPTİMİZASYONU (PSO) YÖNTEMİ İLE KIYI ÇİZGİSİ ÇIKARTILMASI: ERÇEK GÖLÜ ÖRNEĞİ Hatice ÇATAL REİS 1, Bülent BAYRAM 2 1 Dr., Gümüşhane Üniversitesi, Harita Mühendisliği Bölümü, 29100,
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI
 DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
Merkezi Yığılma ve Dağılım Ölçüleri
 1.11.013 Merkezi Yığılma ve Dağılım Ölçüleri 4.-5. hafta Merkezi eğilim ölçüleri, belli bir özelliğe ya da değişkene ilişkin ölçme sonuçlarının, hangi değer etrafında toplandığını gösteren ve veri grubunu
1.11.013 Merkezi Yığılma ve Dağılım Ölçüleri 4.-5. hafta Merkezi eğilim ölçüleri, belli bir özelliğe ya da değişkene ilişkin ölçme sonuçlarının, hangi değer etrafında toplandığını gösteren ve veri grubunu
İstatistik ve Olasılık
 İstatistik ve Olasılık Örnekleme Planlar ve Dağılımları Prof. Dr. İrfan KAYMAZ Tanım İncelenen olayın ait olduğu anakütlenin bütünüyle dikkate alınması zaman, para, ekipman ve bunun gibi nedenlerden dolayı
İstatistik ve Olasılık Örnekleme Planlar ve Dağılımları Prof. Dr. İrfan KAYMAZ Tanım İncelenen olayın ait olduğu anakütlenin bütünüyle dikkate alınması zaman, para, ekipman ve bunun gibi nedenlerden dolayı
Hafta 2 Görüntünün Alınması ve Sayısallaştırılması
 BLM429 Görüntü İşlemeye Giriş Hafta 2 Görüntünün Alınması ve Sayısallaştırılması Yrd. Doç. Dr. Caner ÖZCAN When something can be read without effort, great effort has gone into its writing. ~E. J. Poncela
BLM429 Görüntü İşlemeye Giriş Hafta 2 Görüntünün Alınması ve Sayısallaştırılması Yrd. Doç. Dr. Caner ÖZCAN When something can be read without effort, great effort has gone into its writing. ~E. J. Poncela
Algoritmalar ve Programlama. Algoritma
 Algoritmalar ve Programlama Algoritma Algoritma Bir sorunu / problemi çözmek veya belirli bir amaca ulaşmak için gerekli olan sıralı mantıksal adımların tümüne algoritma denir. Algoritma bir sorunun çözümü
Algoritmalar ve Programlama Algoritma Algoritma Bir sorunu / problemi çözmek veya belirli bir amaca ulaşmak için gerekli olan sıralı mantıksal adımların tümüne algoritma denir. Algoritma bir sorunun çözümü
Genel olarak test istatistikleri. Merkezi Eğilim (Yığılma) Ölçüleri Dağılım (Yayılma) Ölçüleri. olmak üzere 2 grupta incelenebilir.
 Ölçüleri Dağılım (Yayılma) Ölçüleri. olmak üzere 2 grupta incelenebilir.") 4.SUNUM Genel olarak test istatistikleri Merkezi Eğilim (Yığılma) Ölçüleri Dağılım (Yayılma) Ölçüleri olmak üzere 2 grupta incelenebilir. 2 Ranj Çeyrek Kayma Çeyrekler Arası Açıklık Standart Sapma Varyans
4.SUNUM Genel olarak test istatistikleri Merkezi Eğilim (Yığılma) Ölçüleri Dağılım (Yayılma) Ölçüleri olmak üzere 2 grupta incelenebilir. 2 Ranj Çeyrek Kayma Çeyrekler Arası Açıklık Standart Sapma Varyans
Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss
 Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss Jordan Yöntemi ve Uygulaması Performans Ölçümü 2 Bu çalışmada,
Motivasyon Matrislerde Satır İşlemleri Eşelon Matris ve Uygulaması Satırca İndirgenmiş Eşelon Matris ve Uygulaması Matris Tersi ve Uygulaması Gauss Jordan Yöntemi ve Uygulaması Performans Ölçümü 2 Bu çalışmada,
İÇİNDEKİLER ÖN SÖZ...
 İÇİNDEKİLER ÖN SÖZ... v GİRİŞ... 1 1. İSTATİSTİK İN TARİHÇESİ... 1 2. İSTATİSTİK NEDİR?... 3 3. SAYISAL BİLGİDEN ANLAM ÇIKARILMASI... 4 4. BELİRSİZLİĞİN ELE ALINMASI... 4 5. ÖRNEKLEME... 5 6. İLİŞKİLERİN
İÇİNDEKİLER ÖN SÖZ... v GİRİŞ... 1 1. İSTATİSTİK İN TARİHÇESİ... 1 2. İSTATİSTİK NEDİR?... 3 3. SAYISAL BİLGİDEN ANLAM ÇIKARILMASI... 4 4. BELİRSİZLİĞİN ELE ALINMASI... 4 5. ÖRNEKLEME... 5 6. İLİŞKİLERİN
EM302 Yöneylem Araştırması 2 Doğrusal Olmayan Programlamaya Giriş. Dr. Özgür Kabak
 EM302 Yöneylem Araştırması 2 Doğrusal Olmayan Programlamaya Giriş Dr. Özgür Kabak Doğrusal Olmayan Programlama Eğer bir Matematiksel Programlama modelinin amaç fonksiyonu ve/veya kısıtları doğrusal değil
EM302 Yöneylem Araştırması 2 Doğrusal Olmayan Programlamaya Giriş Dr. Özgür Kabak Doğrusal Olmayan Programlama Eğer bir Matematiksel Programlama modelinin amaç fonksiyonu ve/veya kısıtları doğrusal değil
Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar
 BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
Görüntü Sınıflandırma
 Görüntü Sınıflandırma Chapter 12 https://www.google.com.tr/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0 CBwQFjAA&url=http%3A%2F%2Ffaculty.une.edu%2Fcas%2Fszeeman%2Frs%2Flect%2FCh%2 52012%2520Image%2520Classification.ppt&ei=0IA7Vd36GYX4Uu2UhNgP&usg=AFQjCNE2wG
Görüntü Sınıflandırma Chapter 12 https://www.google.com.tr/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0 CBwQFjAA&url=http%3A%2F%2Ffaculty.une.edu%2Fcas%2Fszeeman%2Frs%2Flect%2FCh%2 52012%2520Image%2520Classification.ppt&ei=0IA7Vd36GYX4Uu2UhNgP&usg=AFQjCNE2wG
Dijital Görüntü İşleme Teknikleri
 Teknikleri Ders Notları, 2013 Doç. Dr. Fevzi Karslı Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 08 Ekim 2013 Salı 1 Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, temel kavramlar, kaynaklar.
Teknikleri Ders Notları, 2013 Doç. Dr. Fevzi Karslı Harita Mühendisliği Bölümü Mühendislik Fakültesi KTÜ 08 Ekim 2013 Salı 1 Ders Planı ve İçeriği 1. Hafta Giriş, dersin kapsamı, temel kavramlar, kaynaklar.
Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi
 Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi 1 Dijital görüntü işlemede temel kavramlar Sayısal Görüntü İşleme; bilgisayar yardımı ile raster verilerin
Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi 1 Dijital görüntü işlemede temel kavramlar Sayısal Görüntü İşleme; bilgisayar yardımı ile raster verilerin
Bulanık Mantık Tabanlı Uçak Modeli Tespiti
 Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
MAKİNE ELEMANLARI DERS SLAYTLARI
 MAKİNE ELEMANLARI DERS SLAYTLARI TOLERANSLAR P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L I H O Ğ LU Tolerans Gereksinimi? Tasarım ve üretim
MAKİNE ELEMANLARI DERS SLAYTLARI TOLERANSLAR P r o f. D r. İ r f a n K A Y M A Z P r o f. D r. A k g ü n A L S A R A N A r ş. G ör. İ l y a s H A C I S A L I H O Ğ LU Tolerans Gereksinimi? Tasarım ve üretim
Gerçek Zamanlı Olarak, Anfis İle Renk Tabanlı Nesne Tespit Ve Motorlu Sistem İle Takip Edilmesi
 S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ T E K N İ K B İ L İ M L E R M E S L E K Y Ü K S E K O K U L U S U L E Y M A N D E M I R E L U N I V E R S I T Y T E C H N I C A L S C I E N C E S V
S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ T E K N İ K B İ L İ M L E R M E S L E K Y Ü K S E K O K U L U S U L E Y M A N D E M I R E L U N I V E R S I T Y T E C H N I C A L S C I E N C E S V
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ
 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ MÜHENDİSLİKTE DENEYSEL METOTLAR II DOĞRUSAL ISI İLETİMİ DENEYİ 1.Deneyin Adı: Doğrusal ısı iletimi deneyi..
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ MÜHENDİSLİKTE DENEYSEL METOTLAR II DOĞRUSAL ISI İLETİMİ DENEYİ 1.Deneyin Adı: Doğrusal ısı iletimi deneyi..
ANALOG VİDEO TEMELLERİ
 ANALOG VİDEO TEMELLERİ Video sinyali; bir görüntünün kamera vasıtası ile elektriksel hale dönüştürülmesiyle oluşan sinyaldir.video sinyali ilk zamanlarda renksiz (siyah/beyaz) olarak iafade edilebilmiş
ANALOG VİDEO TEMELLERİ Video sinyali; bir görüntünün kamera vasıtası ile elektriksel hale dönüştürülmesiyle oluşan sinyaldir.video sinyali ilk zamanlarda renksiz (siyah/beyaz) olarak iafade edilebilmiş
İRİSTEN KİMLİK TANIMA SİSTEMİ
 ÖZEL EGE LİSESİ İRİSTEN KİMLİK TANIMA SİSTEMİ HAZIRLAYAN ÖĞRENCİLER: Ceren KÖKTÜRK Ece AYTAN DANIŞMAN ÖĞRETMEN: A.Ruhşah ERDUYGUN 2006 İZMİR AMAÇ Bu çalışma ile, güvenlik amacıyla kullanılabilecek bir
ÖZEL EGE LİSESİ İRİSTEN KİMLİK TANIMA SİSTEMİ HAZIRLAYAN ÖĞRENCİLER: Ceren KÖKTÜRK Ece AYTAN DANIŞMAN ÖĞRETMEN: A.Ruhşah ERDUYGUN 2006 İZMİR AMAÇ Bu çalışma ile, güvenlik amacıyla kullanılabilecek bir
VERİ KÜMELERİNİ BETİMLEME
 BETİMLEYİCİ İSTATİSTİK VERİ KÜMELERİNİ BETİMLEME Bir amaç için derlenen verilerin tamamının olduğu, veri kümesindeki birimlerin sayısal değerlerinden faydalanarak açık ve net bir şekilde ilgilenilen özellik
BETİMLEYİCİ İSTATİSTİK VERİ KÜMELERİNİ BETİMLEME Bir amaç için derlenen verilerin tamamının olduğu, veri kümesindeki birimlerin sayısal değerlerinden faydalanarak açık ve net bir şekilde ilgilenilen özellik
PROJEM İSTANBUL ARAŞTIRMA PROJESİ BİLGİSAYARLI GÖRÜ VE SINIFLANDIRMA TEKNİKLERİYLE ARAZİ KULLANIMININ OTOMATİK OLARAK BULUNMASI
 PROJEM İSTANBUL ARAŞTIRMA PROJESİ BİLGİSAYARLI GÖRÜ VE SINIFLANDIRMA TEKNİKLERİYLE ARAZİ KULLANIMININ OTOMATİK OLARAK BULUNMASI Proje Yüklenicisi: Yeditepe Üniversitesi Mühendislik ve Mimarlık Fakültesi
PROJEM İSTANBUL ARAŞTIRMA PROJESİ BİLGİSAYARLI GÖRÜ VE SINIFLANDIRMA TEKNİKLERİYLE ARAZİ KULLANIMININ OTOMATİK OLARAK BULUNMASI Proje Yüklenicisi: Yeditepe Üniversitesi Mühendislik ve Mimarlık Fakültesi
EĞİTİM-ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ VE YAZILIM DERSİ 6. SINIF 2. DÖNEM 2. SINAV ÇALIŞMA NOTLARI
 2015-2016 EĞİTİM-ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ VE YAZILIM DERSİ 6. SINIF 2. DÖNEM 2. SINAV ÇALIŞMA NOTLARI MİCROSOFT EXCEL PROGRAMI Programın Açılışı: Başlat Tüm Programlar Microsoft Office Microsoft
2015-2016 EĞİTİM-ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ VE YAZILIM DERSİ 6. SINIF 2. DÖNEM 2. SINAV ÇALIŞMA NOTLARI MİCROSOFT EXCEL PROGRAMI Programın Açılışı: Başlat Tüm Programlar Microsoft Office Microsoft
İstatistik 1. Bölüm 5 Olasılık Teorisi ve Kesikli Olasılık Dağılımları. Ankara Üniversitesi SBF, GYY
 İstatistik 1 Bölüm 5 Olasılık Teorisi ve Kesikli Olasılık Dağılımları Bu Bölümde İşlenecek Konular Temel Olasılık Teorisi Örnek uzayı ve olaylar, basit olasılık, birleşik olasılık Koşullu Olasılık İstatistiksel
İstatistik 1 Bölüm 5 Olasılık Teorisi ve Kesikli Olasılık Dağılımları Bu Bölümde İşlenecek Konular Temel Olasılık Teorisi Örnek uzayı ve olaylar, basit olasılık, birleşik olasılık Koşullu Olasılık İstatistiksel
Çekişmeli Üretici Ağlar Kullanarak Dış Mekan Görüntülerinin Geçici Niteliklerini Düzenleme
 Çekişmeli Üretici Ağlar Kullanarak Dış Mekan Görüntülerinin Geçici Niteliklerini Düzenleme Adjusting Transient Attributes of Outdoor Images using Generative Adversarial Networks Levent Karacan, Aykut Erdem,
Çekişmeli Üretici Ağlar Kullanarak Dış Mekan Görüntülerinin Geçici Niteliklerini Düzenleme Adjusting Transient Attributes of Outdoor Images using Generative Adversarial Networks Levent Karacan, Aykut Erdem,