Dumlupınar Üniversitesi Kontrol Sistemlerinin Temelleri Hazırlayan: Kazım EVECAN Kontrol Sistemleri. Şekil1
|
|
|
- Zeki Akyüz
- 8 yıl önce
- İzleme sayısı:
Transkript
1 Kontrol Sistemleri Kısaca elde edilmek istenen veriyi yada verileri düzenlemek ve kumanda etmek amacıyla bir araya gelmiş elemanlar topluluğuna kontrol sistemi denilir. Kontrol sistemleri günümüzde yaygın olarak birçok alanda kullanılmaktadır. İlgili olduğumuz kontrol sistemi elektriksel, mekanik, biyolojik, vb. olabilir. Sıcaklık kontrolü, geçiş kontrolü, arabada bulunan birçok sistem (şekil3`e bakınız), ve otomatik pilot kontrolü bunlara örnek verilebilir. Günümüzde elektriksel kontrol sistemlerinin merkezinde bulunan kontrolörler mikroişlemci, mikrodenetleyici, ve PLC`lerden oluşmaktadır. Girişler Çıkışlar Sistem Kontrolör Şekil1 Donanımsal olarak kontrol sisteminde bulunan elemanlar: 1. Kontrolör: mikroişlemci, mikrodenetleyici, yada PLC. Sensörler: takometre, ısıl çift, ışık duyarlılıklı direnç (LDR), fiber optik sensör, vb. 3. Analog devre elemanları: amplifikatör, osilatör, potansiyometre, seramik rezonatör, 4. Görüntü modülü: LCD, yedi parçalı ekran, bilgisayar 5. Çıkış elemanları: akuatör, DC motor, vb. Kontrolör'ün elemanları: 1. Analog dijital dönüştürücü: X bit ADC. Zamanlayıcı: gerçek zaman saati (RTC), Y bit zamanlayıcı, bekçi köpeği zamanlayıcısı, 3. Giriş çıkış portları: Genel amaçlı giriş çıkış pinleri 4. Seri ve paralel ve kablosuz iletişim modülleri: seri iletişim modülleri UART, SPI, I C, CAN, LIN, USB, Capture Compare PWM, JTAG, RS3, ethernet, vb.; kablosuz RF IEEE8.11a,b,g, ve n 5. Hafıza modülü: Flash, SRAM, DRAM, DMA Kontrol sistemleri giriş çıkış sinyalleri türlerine göre açık ve kapalı çevrim kontrol sistemleri olarak ikiye ayrılır. Açık çevrim kontrol sistemlerinde giriş işareti çıkıştan bağımsızdır. Buna trafik sinyalizasyon sistemi (eğer trafik yoğunluğunu dikkate almıyorsa) örnek verilebilir. Kapalı çevrim kontrol sistemlerinde ise giriş işareti, bir referans işaretin çıkış işaretiyle toplamından yada farkından oluşmaktadır (fark hatayı e(t) göstermektedir) ve bu sistemler geri beslemeli sistemler olarak adlandırılır (şekil). Alternatif akım motor hız kontrolü buna örnek verilebilir. Şekil4'e bakıldığında, motorun hızı, triak iletim açısı kontrol edilerek P1 üzerinden ayarlanmaktadır. Bu devrede R P1 ve C3 üzerinden bir geri besleme mevcut olup, motor yüke bindiği zaman zıt elektromotor kuvvet (EMK Lenz Yasası) azalıp gerilim düşeceğinden R, P1, ve C3 üzerindeki gerilim artıp triak iletim açısı artırılmaktadır ve bu nedenle motor hızı arttırılmaktadır. 1/41.

2 r (t ) R(s) + e (t) E (s) K G(s) ± V (s) K G(s ) = R( s) 1 K G (s) H ( s) H(s) Şekil Şekil3 Şekil4 /41. v (t) V (s)

3 En basit anlamda eğer iki olay birbirini etkiliyorsa, geri besleme mevcuttur ve bir süreç içerisinde olaylar birbirlerini neden-sonuç ilişkisi içerisinde etkilemesine geri besleme denir. Isıtma sistemi, osilatör, ve biyolojik döngüler geri beslemeye örnek verilebilir. Geri besleme negatif veya pozitif formdadır. Negatif besleme kendini dengeleyen (örneğin negatif direnç devresi OPAMP), pozitif beslemeyse kendini arttıran bir etkiye sahiptir. Bundan dolayı geribeslemeli sistemlerin kararlılığı ayrı bir öneme sahiptir (Nyquist kararlılık testi) []. Şekil5 deki tristörlü doğru akım motoru, negatif beslemeye bir örnek olarak verilmiştir. Matematikte başlangıç yada sınır değerleri bilinen lineer diferansiyel denklemleri çözmede Laplace dönüşümünü kullanırız. Benzer şekilde, diferansiyel denklemlerle ortaya konan kontrol sistemlerinin çözümlenmesinde Laplace dönüşümü kullanılmaktadır. Kompleks zaman domeni işlemleri, Laplace domeninde (s=g+jw) kolaylıkla yapılabilir. Bu kontrol sistemlerinin modellenmesinde transfer fonksiyonu ve durum denklemleri en yaygın yöntemlerdendir. Transfer fonksiyonu yöntemi sadece doğrusal sistemler için kullanılmaktadır (zamanla değişen yada değişmeyen), yani LTI sistemler için de geçerlidir. PID (partial integrator and derivative) kontrolör ve DC motorun modellenmesi buna örnek olarak verilebilir. Kontrol sistemlerinde, sistem cevabı göz önünde bulundurulduğunda, (tanımlamaları değişmekle beraber) bazı sınırlamalar mevcuttur; 1. Sıfır yada minimum durğan hal hatası (zero or minimum steady-state response). En büyük aşım (overshoot): Birim basamak tepkisine ait çıkışın en yüksek değerinin en son değerinden çıkarıldıktan sonra elde edilir, yada en son çıkış değerine göre yüzde olarak belirtilir. 3. Maksimum yükselme zamanı (Maximum rise time): Birim basamak tepkisine ait çıkışın son değerinin %1 dan %9 a ulaşana kadar geçen süre. 4. Maksimum yerleşme zamanı (Maximum settling time): Birim basamak tepkisine ait çıkışın izin verilen tolerans aralığına ulaşması için geçen süredir. 5. Kazanç ve faz marjinleri (Gain and phase margins): Sistem kazancının db olduğu nokta kazanç geçiş frekansı (gain crossover frequency) ve fazın -18 olduğu nokta faz geçiş frekansı (phase crossover frequency) olarak adlandırılmaktadır. Kazanç marjini, faz geçiş frekansında sistemi kararsız olması için ne kadar kazanç değişikliği gerekli olduğunu göstermektedir. (yada kapalı çevrim sistemin kararlılığını bozmadan, açık çevrim sistemin kazancının ne kadar arttırılabileceğini göstermektedir) Benzer şekilde faz marjini, kazanç geçiş frekansında sistemin kararsız olması için ne kadar faz değişikliği gerekli olduğunu göstermektedir. (yada kapalı çevrim sistemin kararlılığını bozmadan, açık çevrim sistemin fazının ne kadar arttırılabileceğini göstermektedir) Tüm bu işlemler için bode grafikleri kullanılmaktadır. Konuyu daha iyi anlayabilmek için Matlab komut satırında margin_gui komutu yazarak kapalı çevrim bir sisteme ait kazanç ve faz marjinleri analizi yapılabilir. Bu sınırlamalar birim basamak tepkisine ait, geçiş durumu (transient) ve kalıcı durum (steady-state) 3/41.
 []. Şekil5 deki tristörlü doğru akım motoru, negatif beslemeye bir örnek olarak verilmiştir.")
4 süreçlerine aittir. Dizayn esnasında tüm bu limitasyonlar dikkate alınır. Buna ek olarak kontrol sistemlerinin kararlı olması gereklidir ve bunun için Routh-Hurwitz testini uygularız (ileride bu konu işlenecekdir []). Şekil5 Lineer Zamanla Değişmeyen Sistemler (Linear Time Invariant Systems (LTI) ) Bir sistemin LTI olabilmesi için lineerlik ve zamanla değişmeme gibi özelliklere sahip olması gereklidir. Lineerlik ve zamanla değişmeme özelliği aşağıdaki gibidir. a1 x 1 ( t ) a1 y 1 ( t ) a x (t ) a y (t ) a1 x 1(t )+a x (t ) a1 y 1 (t )+a y ( t );(lineerlik ) x 1(t T ) y 1 (t T );(zamanla değişmeme) LTI sistemleri zaman ve frekans domeninde iki şekilde gösterebiliriz. Aşağıdaki zaman ve frekans domeni ilişkisini göstermektedir. Yukarıdaki işlemler her iki taraftaki ifadelerin Laplace transformu alınarak, frekans domenindede yapılabilir. h(t) sistemin darbe tepkisidir, H(s) sistemin transfer fonksiyonudur. x 1 (t )* h(t )= y 1(t ) y a d a X 1 ( s ) H ( s )=Y 1 ( s ). * k o n v ol u syo n g ö s t e r m e k t e d i r. Örnek olarak türev operatörü, integral operatörü, ve RLC devresinin oluşturduğu lineer homojen diferansiyel denklem birer LTI sistemdir. Sürekli ve ayrık zaman LTI sistemleri benzer özelliklere sahiptir. Ayrık zamanlı sistemler için gösterim () yerine [] şeklinde yapılmaktadır. Sürekli Zaman Tek Giriş Tek Çıkış Sistemleri (Continuous Time Single Input Single Output Systems (CT-SISO)) Matlab Polinom Formu; 4/41.

5 N ( s) G( s)= s Laplacedeğişkeni, N ( s)ve D( s) pay ve payda polinomu D( s) s G( s)= G=tf ( pay, payda) sisteme ait transfer fonksiyonu s + s+1 s G( s)= için G=tf ([ 1 ],[1 1]); yada s=tf (' s ') ; G=s(s ^ +* s +1) ; s + s+1 Sıfır, Kutup, ve Kazanç Formu; ( s z 1) (s z ) ( s z n) G( s)=k s Laplace değişkeni, k reel yada sanal değerli kazanç ( s p1) (s p ) (s pn ) z 1 z n G(s) transfer fonksiyonuna ait reel yada sanal konjuge çifti olan sıfırlar, N (s) kökleri p1 pn G (s) transfer fonksiyonuna ait reel yada sanal konjuge çifti olankutuplar, D( s)kökleri G= zpk ( sıfır, kutup, kazanç )sisteme ait transfer fonksiyonu sıfır kutup kazanç formunda G( s)= s için G=zpk ([],[ 1 1],[1]); yada s=zpk (' s ' ); G=s /( s+1) ; (s +1) Ayrık Zaman Tek Giriş Tek Çıkış Sistemi (Discreate Time Single Input Single Output System (DT-SISO)) Matlab Polinom Formu; G( z)= N ( z) z ayrık zaman değişkeni, N ( z) ve D ( z) pay ve payda polinomu D( z) G( z)= z G=tf ( pay, payda, örnekleme periyodu)sisteme ait transfer fonksiyonu z z 6 G( z)= z için G=tf ([1 ],[1 6],.1); yada z=tf (' z ',.1); G=z /(z ^ z 6); z z 6 Sıfır, Kutup, ve Kazanç Formu örneği; z G(z)= için G=zpk ([], [ 3],[1],.1); yada z=zpk (' z ',.1); G=z /(z z 6); ( z +) ( z 3) Bunlara benzer şekilde MIMO (Multiple Input Multiple Output) sistemlere ait transfer fonksiyonları oluşturulabilir. Detaylı bilgi için Matlab Help kısmına bakabilirisiniz. Transfer Fonksiyonlarına Gecikme Ekleme (Transfer Functions with Time Delay) Matlab'da bir transfer fonksiyonunu herbir giriş çıkış kanalı üzerinde gecikme belirleyerek gösterebilirsiniz. SISO sisteme ait saniye cinsinden gecikme: tf yada zpk objelerine ait iodelay özelliği değiştirilir. G=tf ([1 1],[1 5 3]); G.ioDelay= ; MIMO sisteme ait saniye cinsinden gecikme: tf yada zpk objelerine ait iodelay özelliği değiştirilir. s=tf (' s ') ; sys=[/s (s+1)/(s+1) ; 1 ( s 1)/(s +5)]; tau=[.1.3 ;.]; sys.iodelay =tau ; Sonuç Transfer Fonksiyonu... 5/41.
sisteme ait transfer fonksiyonu sıfır kutup kazanç formunda G( s)= s için G=zpk ([],[ 1 1],[1]); yada s=zpk (' s ' ); G=s /( s+1) ; (s +1) Ayrık Zaman Tek Giriş Tek Çıkış Sistemi (Discreate")
6 Birinci giriş için #1: exp(-.1*s) * /s #: 1 İkinci giriş için #1: exp(-.3*s) * (s+1)/(s+1) #: exp(-.*s) * (s-1)/(s+5) Kontrol Sistemlerinde Durum Eşitliklerinin Analizi Herbir kontrol sistemi transfer fonksiyonu yada durum eşitlikleri şeklinde gösterilebilir. Tekrar hatırlamak gerekirse transfer fonksiyonu yöntemi sadece lineer sistemler için geçerlidir, LTI sistemler gibi. Durum eşitlikleriyse doğrusal yada doğrusal olmayan sistemlerin tümüne uygulanabilir. Sistem bu duruma indirgendiğinde işlem MATLAB aracılığıyla kolaylıkla yapılabilir. x durum matrisi, u giriş matrisi ve y çıkış matrisidir. x = A x +B u ; y=c x +D u ; Aşağıda bu matrislerin büyüklükleri gösterilmiştir. Ayrıca Simulink den aşağıda gösterilen blok seçilerek aynı işlemler yapılabilir. Transfer fonksiyonuna ait pay ve paydadan durum eşitliklerine ait bilgiler elde edilebilir, ve bunun terside Matlab da yapılabilir. [ ] [ ][ ] [ ] [ ] x 1 x u = x 3 u x [] y=[ ] [] x1 u +[ ] 1 x u A=[5 1; 3]; B=[1 ;1 1]; C=[ ]; D=[ ]; [num1,den1]=sstf(a,b,c,d,1) [num,den]=sstf(a,b,c,d,) num1 =. 14. den1 = num = den = /41.

7 Y ( s) Y ( s) s+14 G1 (s)= = G (s)= = U 1 (s) s 8 s+13 U ( s) s 8 s+13 Verilen transfer fonksiyonuna ait, basamak fonksiyonun tepkisi aşağıdaki şekilde Matlab da bulunur. Step fonksiyonu sisteme birim basamak fonksiyonunu uygulamaktadır. Zaman domeninde konvolüsyon yerine, frekans domeninde bu işlemin yapıldığını ve bulunan sonucun zaman domenine dönüştürülerek fonksiyonun bulunduğunu ve grafiğinin çizildiğini düşünebilirsiniz. Darbe tepkisi için impulse(g(s)) fonksiyonu kullanılmaktadır. 5 s G( s)= s + s+5 clc num=[ 5]; den=[1 5]; step(num,den) grid title('basamak Fonksiyonu Tepkisi') Şekil6 Benzer şekilde impulse(tf) fonksiyonu darbe tepkisine ait grafiği çizer, parametresi transfer fonksiyonu, tf yada ss objesidir. clc num=[ 5]; den=[1 5]; figure; grid 7/41.
) fonksiyonu kullanılmaktadır.")
8 title('darbe Fonksiyonu Tepkisi') impulse(num,den) Sistemin darbe tepkisi şekil7 deki gibi olur. Şekil7 Ayrıca bir MIMO sistemin state-space modeline ait bilgiler aşağıdaki şekilde elde edilebilir. Y (s) Y ( s) G1 (s)= 1 G ( s)= İki çıkış bir girişli sistem için verilmiş ise, U (s ) U ( s) s+1 3 s +3 s +3 s + H (s)= s +3 s +s +1 [ ] H = [tf([1 1],[1 3 3 ]) ; tf([1 3],[1 1 1])]; sys = ss(h) % Noktalı virgül olmadığına dikkat ediniz. size(sys) Çıktı aşağıdaki gibidir. Ara işlemleri görmek için noktalı virgülü kaldırmak gerektiğine dikkat ediniz. a= x1 x x3 x4 x1 x x3-1 x4 x /41.
![Y (s) Y ( s) G1 (s)= 1 G ( s)= İki çıkış bir girişli sistem için verilmiş ise, U (s ) U ( s) s+1 3 s +3 s +3 s + H (s)= s +3 s +s +1 [ ] H = [tf([1](/docs-images/43/1494293/images/page_8.jpg "1],[1 3 3 ]) ; tf([1 3],[1 1 1])]; sys = ss(h) % Noktalı virgül olmadığına dikkat ediniz. size(sys) Çıktı aşağıdaki gibidir.")
9 x5 1 b= u1 x1 1 x x3 x4 x5 c= y1 y x1 x x3 x x5 1 d= u1 y1 y 1 Continuous-time model. State-space model with outputs, 1 inputs, and 5 states. Laplace ve ters Laplace dönüşümü aşağıdaki şekilde yapılmıştır. lsimplot syms t s laplace(dirac(t - 3), t, s) laplace(heaviside(t - pi), t, s) ilaplace(1/s,s,t) >> laplace ans = exp(-3*s) ans = exp(-pi*s)/s ans = 1 Matlab LTI Objeleri Bir LTI model objesine ait özelliği değiştirmek için kullanılan fonksiyon parametresi olarak yazıldıksan sonra değeri atanır. Format aşağıdaki gibidir. 'PropertyName',PropertyValue sys = ss(a,b,c,d,'property1',value1,...,'propertyn',valuen) ss objesinin bazı özellikleri aşağıda verilmiştir. a,b,c,d,e: Durum denklemlerine ait matrisler. e (implicit descriptor) default olarak [] dır. Daha önceden belirtildiği gibi A Nx Nx, B Nx e Nu, C Ny Nx, D Ny Nu, ve E Nx Nx ölçülerde matrislerdir. Scaled: Nümerik doğruluğu sağlamak için sistemin ölçeklenip ölçeklenmediğini yazar, 1 yada dır. 9/41.

10 StateName: Durumların isimleri atanır, string dizisidir. StateUnit: Durumların birimleri atanır, string dizisidir. InternalDelay: Sistemin iç kısımlarına ait gecikmelerin tutulduğu vektördür. Örneğin, sistemleri paralel, seri, yada kapalı döngüde bağlarken gecikme eklenmek istendiğinde kulanılır. InputDelay: Herbir giriş kanalına ait gecikmelerin tutulduğu vektördür (Nx by 1). OutputDelay: Herbir çıkış kanalına ait gecikmelerin tutulduğu vektördür (Ny by 1). Ts: Ayrık zamanlı sisemler için örnekleme periyodu, nümerik bir değerdir. Sürekli zaman için sıfırdır. TimeUnit: Zaman değişkeninin birimini göstermektedir, stringdir. 'nanoseconds', 'hours', 'weeks', 'years' vb. InputName: Girişlere isim ataması yapılabilir, stringdir. Örnek kullanım; sys.inputname = 'controls'; InputUnit: Girişlere birim ataması yapılabilir, stringdir. InputGroup: MIMO sistemlerde girişler guruplandırılarak işlemler yapılabilir, struct dır. Örnek kıllanım; sys.inputgroup.controls = [1 ]; sys.inputgroup.noise = [3 5]; 1 ve girişler control olarak, 3 ve 5 girişler noise olarak adlandırılmıştır. sys(:,'controls') sistemin controls girişlerinden tüm çıkışlarına ait alt sistemin çıkarılması. OutputName: Çıkışlara isim ataması yapılabilir, string dir. OutputUnit: Çıkışlara birim ataması yapılabilir, string dir. OutputGroup: MIMO sistemlerde Çıkışlar guruplandırılarak işlemler yapılabilir, struct dır. Örnek kıllanım; sys.outputgroup.temperature=[1]; sys.outputgroup.measurement = [3 5]; sys('measurement',:) tüm girişlerden measurement çıkışlarına ait alt sistem çıkarılması Name: Sisteme isim ataması, string dir. Notes: Sistemle ilgili her türlü notlardır. UserData: Sistemle alakalı Matlab veri yapısıdır. Şekil8'de dcm adlı ss objesine ait örnek verilmiştir. Yine LTI sistemleri göstermek için kullanılan tf ve zpk objesi aynı özelliklere sahipdir (den ve num haricinde). Matlab workspaceden objelere ait tüm veri yapılarına değerleriyle ulaşabilirsiniz. Ayrıca dcm(1,1) <1x1 ss> ss üzerine tıkladığınızda ss objesine ait tüm açıklama Matlab Help ekranından görülebilir. Asimptotik Bode Grafikleri Bir LTI sisteme ait transfer fonksiyonunun frekansla değişimi (frequency sweep) nasıldır sorusunun cevabını bu grafikler vermektedir. Düşey eksende genlik db cinsinden ve faz açısını derece olarak (yada 36) arasında gösteren, ve yatay eksende frekansı temsil eden belirli bir değerden itibaren logaritmik olarak arttırılan iki grafik vardır. Daha yüksek ve düşük genliğin elde edildiği frekans bölgesinin yanında, bu grafiklerde asimptotlar ve genlik yada fazın iki katı arttığı yada yarı yarıya azaldığı kırılma frekansı olarak adlandırılan +yada-3 db noktaları önemlidir. H ( s), s= j w H ( j w) ang (H ( j w)) H ( j w) db= log 1 ( H ( j w) ) s=jw için genlik ve faz değişimi elde edildiğinden bode grafiklerinde durağan hal tepkisi elde edilir. (Sönümleme sabiti alınmıştır.) Aşağıda iki sistemin bode grafikleri aracığıyla aynı olduğu gösterilmiştir. ex'= ax+bu ve y=cx+du 1/41.

11 Şekil8 a = [ -4; 4 ]; b = [-1;.5]; c = [-.5, -]; d = [-1]; e = [1 ; -3.5]; % Create a descriptor state-space model. sys1 = dss(a,b,c,d,e); % Compute an explicit realization. sys = ss(sys1,'explicit') bode(sys1,sys) >> bode_plot sys = a= x1 x x1-4 x - b= u1 x1-1 x -5 c= x1 x y d= u1 y1-1 Continuous-time state-space model. Y ( s) G( s)= =C (s I A) 1 B+ D x( )= için X ( s) 11/41.
 bode(sys1,sys) >> bode_plot sys = a= x1 x x1-4 x - b= u1 x1-1 x -5 c=")
12 Şekil9 Bir MIMO sistem'e, istenilen herhangi bir giriş sinyali uygulamak için lsimplot fonksiyonu kullanılır. Belirlenen zaman aralığında ve adımlarla giriş sinyali uygulanır. u matrisi, sistemin giriş sayısı x t matrisi sütun sayısı ölçülerindedir. ssobjesi herhangi bir ss objesidir. t matrisi istediğimiz zaman aralığını belirlenen adımlarla göstermektedir. lsimplot(ssobjesi, u, t); Bilindiği gibi transfer fonksiyonuna ait frekans cevabı belirli bir frekans aralığındaki, genlik (db) ve faz (derece) olarak elde edilir. Giriş sinyaline ait Laplace dönüşümü kolaylıkla yapılabiliyorsa, ilgili frekansda transfer fonksiyonuna ve giriş sinyaline ait Laplace dönüşümleri çarpıldıktan sonra çıkışa ait genlik db cinsinden ve faz da derece cinsinden bulunabilir. Giriş ve transfer fonksiyonuna ait db cinsinden genlikler ve derece cinsinden fazlar mevcutsa, çıkışa ait değerleri bulmak için toplamları alınarak durağan hal tepkisine ait bilgiler elde edilir. Bir sinyal için 4 önemli parametre vardır. Sinyalin türü (kare, testere, yada üçgen dalga gibi), genliği, frekansı, ve faz farkı. Eğer giriş sinyalini Laplace dönüşümüyle ortaya koymak zor ise, bu noktada Fourier dönüşümünü hatırlamak gereklidir. Bu teoreme göre, herhangi bir sinyal değişik frekanslarda sinüs sinyallerinin toplamı olarak ifade edilebilir. Sinyali oluşturan bileşenler bilindiğinde, yani herbir bileşene ait frekans ve genlik bilgileri bilindiğinde, bode grafiğine bakarak durağan haldeki çıkış sinyalini elde edebiliriz. Aslında bir sinyali oluşturmak için bir kaç tane sinüs bileşeni kullanmak yeterlidir. Şekil1'da kare dalga için bu durum ortaya konulmuş ve 5 sinüs sinyali kullanılmıştır. sin (n w c ) 4 y= π n MATLAB'da geçici hal ve durağan hal tepkisi arasındaki farkı kolayca görebiliriz.(şekil11 bakınız) clc; num=[1 5]; den=[1 3]; s=tf(num,den); t=[:.5:]; u=5*cos(*t+pi/6); y=lsim(num,den,u,t); 1/41.

13 [mag,phase]=bode(num,den,) yss=5*mag*cos(*t+(3+phase)*pi/18); plot(t,u,t,y,'--',t,yss,'.'); % t>1.8 civarinda duragan hal cevabina ulasir % ayni sonuc elde edilebilir figure(); lsimplot(s,u,t); Şekil1 Şekil11 Birden fazla frekansa sahip giriş sinyali uygulandığında yukarıda anlatıldığı gibi herbir sinyal için sistem çıkışındaki sinyaller hesaplandıktan sonra net çıkış tüm sinyallerin toplamı olarak bulunur. % Alcak geciren filtre clc; num=[.5 ]; den=[1 1]; s=tf(num,den); 13/41.

14 bode(num,den) fıgure(); t=[:.5:]; u=sin(.1*t)+cos(.5*t+pi/4)-sin(13*t-pi/6); y=lsim(num,den,u,t); frekans=[ ]; [mag,phase]=bode(num,den,frekans) yss=mag(1,1)*sin(.1*t+phase(1,1)*pi/18)+mag(,1)*cos(.5*t+pi/4+phase(,1)*pi/ 18)-mag(3,1)*sin(13*t-pi/6+phase(3,1)*pi/18); figure(); plot(t,u,t,y,'--',t,yss,'.'); Şekil1 Ayrıca bode grafiklerinden sistemin kararlılığı hakkında fikir edinebiliriz. Konuyu daha iyi anlayabilmek için Matlab komut satırında margin_gui komutu yazarak kapalı çevrim bir sisteme ait kazanç ve faz marjinleri analizi yapılabilir. Bir sisteme ait kazanç ve faz marjinleri [Gm, Pm, Wgm, Wpm]=Margin(sys) fonksiyonuyla elde edilebilir. Sorular: 1- Şekil13'de bulunan mekanik kütle yay sisteme ait modelin (a) seçeneğini Matlab'da ve (b) seçeneğini Simulink'de simülasyonunu yapınız. a) m=1, b=.3, k=., x()=.1, x'()=.5, F= (sönümlemede) b) m=1, b=.7, k=1, x()=, x'()=, F=1 Şekil13 14/41.

15 - Basit bir osilatör (wien köprü, ring yada kristal osilatör gibi) devresini teorik olarak ortaya koyup, blok diyagramını çiziniz. 3- Paralel RLC devresini teorik olarak ortaya koyup, Matlab ve Simulink'de aşağıdaki değerler için simülasyonunu yapınız. R=8 ohm, C=5 uf, L=5 mh, i(t)= 5*exp(-*t)*sin(1*pi*t), sin(1.1*t), sin(.9*t). 4- Şekil14'deki PID geribesleme kontrolörünü doğru akım motorunun hızını kontrol etmek amacıyla dizayn ediniz ve Matlab ve Simulink'de simülasyonunu yapınız. Şekil14 5- Herhangi bir ikinci dereceden aktif geribeslemli lowpass filtrenin devresini çiziniz, transfer fonksiyonunu bulunuz, ve simülasyonunu yapınız. Yararlanılan ve faydalı olabilecek linkler: [1] [] [3] [4] [5] MATLAB ve SIMULINK'le Modelleme Kontrol II, Zafer Birgül ISBN; /41.

16 Doğru Akım Motor Kontrolü, Modelleme ve Matlab Simülasyonu Doğrusal yada doğrusal olmayan dinamik sistemlerin tümü Matlab ve Simulink aracılığıyla modellenip simülasyonu yapılabilir. Bu ksımda bir doğru akım motoruna ait bir lineer model geliştirilip Matlab'da ve Simulink'de simülasyonu yapılacaktır. Uygulamanın sonunda transfer fonksiyonları, bunlara ait sıfır, kutup, ve kazanç değerlerinin bulunması, geçici zaman tepkisi (transient response), durağan hal tepkisi (steady-state response), kapalı çevrim ve açık çevrim sistemler, yer kök eğrileri öğrenilecektir, ve sistem üzerindeki sınırlamalar hakkında bilgi edinilecektir. Grafiklerdeki verilerin üzerine tıklayarak değerlerini okuyabilirsiniz. Ara işlemleri Matlab da Command Window kısmında görebilmek için komutların sonundaki ";" kaldırabilirsiniz. Genel Matlab çalışma ortamı şekil15'de gözükmektedir. Sağ tarafda bulunan Workspace kısmından oluşturduğunuz değişkenlere ait datalara, objelere, ve bunlara ait maksimum minimum değerlerine ve boyutlarına ulaşabilirsiniz. Sol tarafda, bulunduğunuz konumda ihtiva edilen dosyalar, ve sağ alt kısımda Command History kullandığınız komutlara ait liste bulunmaktadır. Kodlarınızı bir script dosyasına yazarak (*.m file) komut satırında tekrar yazmak zorunda kalmazsınız ve sekmeler kısmında bulunan kısa yollar aracılığıyla istediğiniz şekilde debug edebilirsiniz, ve çalıştırabilirsiniz. Şekil15 Komutlarınızı bir script dosyasına kaydetmek için NewScript icon'na tıklayın yada File -> new -> script tıkladığınızda şekil16'deki editör karşınıza çıkacaktır, burada komutları yazdıktan sonra save icon'a tıklayarak dosyayı kaydedebilirsiniz. Kodlarınızı yazdıktan sonra kırmızı kutu içinde bulunan 16/41.

17 kısayollar aracılığıyla çalıştırabilir (run) ve satırlara durdurma noktaları koyabilirsiniz (breakpoints). Ayrıca ihtiyaç duyacağınız fonksiyonları bulabilmek için, yada fonksiyonların kullanım bilgilerine ulaşmak için (syntax) mavi kutu içindeki fx kısayoluna tıklayınız; ek olarak bu kısımdan kodu anlaşılabilir kılmak için işaretler ekleyebilirsiniz. Şekil16 T = K m i V emf =K b w J w +K f w=t =K m i ( mekanik kısma ait denklem) ; L i +R i=v K b w (elektriksel kısma ait denklem); L i +R i=v K b w ; (J s+k f ) w( s)=k m I ( s )=T (s) ; (L s+ R) I (s)=v (s) K b w(s ); Km w (s) rad / sec G( s)= = [ ] V (s) ( J s+k f ) ( L s+r)+k m K b V [ ][ ] [ ] K f K M w = J J w + w 1 V y =[1 ] i K b R i i L L L Km T ( s) w( s) 1 = = V ( s) K b w( s) ( L s+r) T ( s) ( J s+k b) [] [] 17/41.
 ; L i +R i=v K b w (elektriksel kısma ait denklem); L i +R i=v K b w ; (J s+k f ) w( s)=k m I ( s )=T (s) ; (L s+")
18 Şekil17 Şekil18 Yukarıda bir doğru akım motoruna ait elektriksel ve mekanik denklemler, sisteme ait transfer fonksiyonu, elektriksel ve mekanik kısımlara ait transfer fonksiyonları, ve sisteme ait durum denklemleri verilmiştir. Şekil17 ve şekil18'e bakıldığında modelleme daha iyi anlaşılacaktır. Matlab kodu aşağıdadır. Simülasyon grafikleri sırasıyla verilmiştir. Veriler hakkında daha detaylı bilgi için grafikler üzerine tıklayınız. 18/41.

19 Matlab Kodu: % % % % % % % % % % % % % Tüm dosyalar ayni klasörde olmalidir. ÖNEMLi NOKTALAR: ***Tork akimla dogru ve gerilimle ters orantilidir.*** ***Açisal hiz gerilimle dogru orantilidir.*** ***Bundan dolayida tork açisal hizla ters orantilidir.*** ***Güç (akim x gerilim) tork x açisal hizla dogru orantilidir. Transfer fonksiyonlariyla ilgili ayrintili bilgi için dokumanlara bak. Matlab Help kismindan ilgili fonksiyonun nasil kullanildigina ait bilgilere erisebilirsiniz. Sisteme ait sinirlamalar: ***sifir yada minimum durgan hal hatasi*** zero or minimum steady-state response error ***En buyuk asim*** outrise ***maximum yukselme zamani*** maximum rise t. ***maximum yerlesme zamani*** maximum settling time ***kazanc ve faz marjinleri*** Gain and phase margins % Yeni bir pencere açar figure; imshow('dcdemofigures_1.png'); figure; imshow('dcdemofigures_.png'); R =.; % Direnç Ohm cinsinden L =.5; % Bobin Henry cinsinden Km =.1; Kb =.1; % Tork ve ters EMK sabitleri ayni degerdedir. Kf =.; % Nms J =.; % Eylemsizlik momenti kg.m^/s^ h1 = tf(km,[l R]); % Armatür kismi transfer fonksiyonu h = tf(1,[j Kf]); % Yük kismi transfer fonksiyonu % size(ss(h)) % ss(h) % ss() fonksiyon state-space matrislerini oluuturur ve size(ss(h)) % boyutlarini gösterir. % ss(h) state space matrislerini ve boyutlarini görebilirisiniz. % x'=ax+bu y=cx+du; A Nx e Nx boyutlarinda, B Nx e Nu boyutlarinda, % C Ny e Nx boyutlarinda, D Ny e Nu boyutlarinda matrislerdir. % [h1, 1] iki giris tek cikis sistem olur MIMO. Birinci giristen cikisa % transfer fonksiyonu h1, ikincisi 1 dir. [h1, 1] yazdiginizda % gorebilirsiniz. dcm = ss(h) * [h1, 1]; % Td torkdaki degisimi gostermektedir. dcm (bu adimda) = w = h*(h1*va + % Td) Td tork degisikligi girisi eklendi, [h1, 1] bundan dolayi dcm adli % obje 1x ss objesidir. dcm = feedback(dcm,kb,1,1); % size(ss(dcm)) iki giris bir cikis iki durum elemani vardir. Kapali döngü % ters EMK, geri besleme olarak Matlab default olarak negatif geribesleme % kabul eder. eger iki 1 den sonra +1 yazilirsa pozitif geribeslemenin % isareti pozitif olur. Yukarida iki transfer fonksiyonu oldugunu % soylemistik. Bunlari Td kismindan sonra paralel olan iki blok ve sonra % cikista toplam olarak dusune bilirsiniz yada iki girisli bir sistem. % Bundan dolayi dcm x1 giris gerektiriir. Yani bir girisi Va olan diger % girisi Td olan cikisysa w olan bir blok diyagram olusturduk. kapali dongu % fonksiyonunda paremetre olarak index degerlerini yazdik, ilk 1 iki tane % olan giristen sadece 1 si yani Va, mesela yazsaydik geribesleme Td % girisine baglanirdi; ikinci 1 cikisimizi gostermektedir zaten 1 tane onun % indexini yazdik oda w dir. bu olusturlan dcm ss objesi ileride % kullanilacaktir. figure; stepplot(dcm(1)); % sistemin birim basamak tepkisiyle (step response) açisal hizin degisimi % görülür. cikisin ilk girise olan degisimi gosterilmistir % stepplot(dcm(1,1)); ile aynidir. Td icin yani. girise uygulanan birim 19/41.

20 % basamak fonksiyonunun tepkisi gorulmek isteniyorsa stepplot(dcm(1,)); % kullanilir. stepplot(dcm(1,:)); her iki cikisida gostermektedir. % unutmayin Td torkdaki degisimi gosermektedir. Yani motor yuke % bineceginden negatif degerler almasi gereklidir. ylabel('\fontsize{16} Acisal Hiz (rad/s)'); xlabel('\fontsize{16} Zaman (s)'); title('\fontsize{16} Acisal hizin birim basamak tepkisiyle olan degisimi'); % ileri besleme dizaynina ait simülasyon figure; imshow('dcdemofigures_3.png'); % kazanç degerinin belirlenmesi icin 1/birim basamak tepkisinin sonsuzdaki % degeri alindi. bunu acik cevrim sistemin cikisinin w duragan halde 1 % olmasi icin. yaptik Kff = 1/dcgain(dcm(1)); % Kff=4.1 dcgain(dcm(1))~.4 yani w(s)/v(s) dc gain transfer fonksiyonun % s= iken degeridir. eger dcgain(dcm(1,)) bulunmak istenseydi W(s)/T(s) % s= iken degerini bulurduk oda t = :.1:15; % -15 s arasinda.1 adimla simülasyon icin noktalar belirledik. % Yükdeki degisiklik (tork) 5s ile 1s arasinda, -.1 Nm tork degisikligi Td = -.1 * (t>5 & t<1); % u giris matrisi x15 matrisdir. Cunku dcm x1 giris gerktiriyordu. Simdi % 15 tane deger icin u = [ones(size(t)) ; Td]; % w_ref=1 ve Td ne oldugunu yukarida belirttik % diag([kff,1]) diagonal matris olusturur Kff 1x1, ve 1 x elamanlaridir. cl_ff = dcm * diag([kff,1]); % ileri beslemeli sistemin duragan halde (steady state) de degerinin 1 % olmasi icin Kff ile carpildi. Sistemin Td ile olan girisi eskisiyle ayni % ss objesine sahip, ve tum degerleri eskisiyle ayni. Fakat Va ile olan % girisi cl_ff ss objesine ait yeni ozellikler atandi, yeni obje eskisinin % Kff katidir (yani amplifikator uygulanmistir). set(cl_ff,'inputname',{'w_ref','td'},'outputname','w'); % burada cl_ff ss objesine ait ozellikler atanmistir. % o ile 15 saniye arasinda 5s ile 1s arasinda -.1Nm tork degisikligi için % sistemin tepksi gösterilir. figure; h = lsimplot(cl_ff,u,t); % cl_ff ileri besleme sistemine ait transfer fonksiyonu % lsimplot u giris matrisine ait t zaman araliginda sistemin cevabidir. % wref 1 olarak atanmistir. title('\fontsize{16} Acisal hizin acik cevrim sistemde basamak tepkisiyle olan degisimi'); legend('cl\_ff'); ylabel('\fontsize{16} Acisal Hiz (rad/s)'); % Grafikte belirtilen -.1 Nm tork degisikliginin grafikde gösterilmesi line([5,5],[.,.3]); line([1,1],[.,.3]); text(7.5,.5,{'tork degisikligi','t_d = -.1Nm'},... 'vertic','middle','horiz','center','color','r'); % Geri beslemeli sistemin sifir duragan hal hatasi icin, root locus yer kok % yontemi kullanarak K kazanç degerini bulma figure; h = rlocusplot(tf(1,[1 ]) * dcm(1)); setoptions(h,'frequnits','rad/s'); set(gca,'xlim',[-15 5],'Ylim',[-15 15]); % eksen limitleri % K C % % % Geri beslemeli sistemle ileri beslemeli sistemin karsilastirilmasi = 5; = tf(k,[1 ]); % K/s kismina ait transfer fonksiyonu append(c,1) 5/s, Sistemin Td ile olan girisi eskisiyle ayni ss objesine sahip, ve tum degerleri eskisiyle ayni. Fakat Va ile olan girisi cl_rloc ss objesine ait yeni ozellikler atandi, yeni obje eskisinin 5/s katidir /41.
; % kazanç degerinin belirlenmesi icin 1/birim basamak tepkisinin sonsuzdaki % degeri alindi. bunu acik cevrim sistemin cikisinin w duragan halde 1 % olmasi icin.")
21 % (yani amplifikator uygulanmistir). Bu islemler dcm * append(c,1) sonucuda % olusmustur. cl_rloc = feedback(dcm * append(c,1),1,1,1); % sisteme geribesleme için gerekli olan kisimlar eklendi. ilk bir % geribeslemenin degerinin 1 oldugunu gosterir. Birinci giris yani wref'e % geribesleme yapilmistir, ikinci 1 bunu gosterir. ucuncu 1 geribeslemein % alindigi cikis yani w gostermektedir. default olarak Matlab'da % geribesleme katsayisi negatif kabul edildiginden sistem girisi wref-w dir figure; h = lsimplot(cl_ff,cl_rloc,u,t); set(cl_rloc,'inputname',{'w_ref','td'},'outputname','w'); title('ileri besleme ve geri beslemeli sistemlerin acisal hizinin tork degisimine olan tepkisi') legend('ileribesleme','geribesleme (rlocus)','location','northwest') % daha iyi geribesleme performansi elde etmek için Lineer Quadratic % Regulator Modeli (LQR) Va = K1 * w + K * w/s + K3 * i kullanildi. Bu % modelde Va girisine uygulanacak sinyal w cikis ve i akim dan elde edilir. % bunlarin sisteme ait durum vektorunun elemanlari olduguna dikkat edin. % x=(w,i) boylece sistemdeki degisim hakkinda daha fazla veri elde edilmis % olunur. i(s)=w(s)/s dir. figure; imshow('dcdemofigures_5.png'); % [1 ; tf(1,[1 ])] birinci transfer fonksiyonu 1 ikinci transfer % fonksiyonu 1/s dir. dc_aug = [1 ; tf(1,[1 ])] * dcm(1); % size(ss(dc_aug)) dc_aug iki cikisli bir girisli uc durum elemani olan bir % ss objesidir. w/s olan bir cikis daha modele, birinci girise uygulanacak % sekilde DC motor modeline eklendi. daha once bahsettigimiz gibi % i(s)=w(s)/s cikisni kullanacagimizdan bu cikisa ihtiyac duyduk. lqry % lineer quadratik durum geribesleme regülatörü dizayn eder. kullanim % [K,S,e] = lqry(ss,q,r,n) seklindedir. Daha iyi tork degisikligini yok % etmek icin (disturbance rejection) cost fonksiyonu su sekilde % hesaplanmistir. cost J= integral ->sonsuz % (i^(t)+w^(t)+.1va^(t))dt K_lqr = lqry(dc_aug,[1 ; ],.1); % K_lqr geribeslemeye ait K, S, ve e (F geribesleme ve W bizim % notasyonumuzda) degerlerini verir. e burada kapali cevrim eigenvalue % lardir e=eign(a-b*k). K yeni bloklardaki katsayilara sahip. P = augstate(dcm); % durum vektörünü çikis vektörüne ekler x'=ax+bu y=cx+du; % y = C x+ D u tek bir esitlik haline gelir. % x = I + % sistem 3 cikisli durumlu girisli oldu % girisler:va,td çikislar:w,x(w,i); x burada i ve w gostermektedir C = K_lqr * append(tf(1,[1 ]),1,1); % 44.7, 36.97, K_lqr katsayilarla 1/s 1 1 carpildi C = 44.7/s, % 36.97, oldu. OL = P * append(c,1); % Açik çevrim dizayn Va=44.7*w/s+36.97*w+15.18*i su anda geribesleme % eklenmedi OL 3 cikis 4 giris 3 durumlu bir objedir. 3 giris Va icin % yukaridaki denklemde verilmistir. diger giris Td icindir CL = feedback(ol,eye(3),1:3,1:3); % kapali çevrim dizayn. eye(3) 3x3 birim matrisdir. ilk 1:3 1 den 3 kadar % tum girisler ve ikinci 1:3 1 den 3 kadar tum cikislari temsil eder. % bunlar sirasiyla birbirine baglanir. default olarak negatif geribesleme % var. cl_lqr = CL(1,[1 4]); % Elimizde sistem 4 giris 3 cikisli, bizim ihtiyacimiz olan LQR sisteme % ait sistem (w_ref,td)->w iki giris 1 cikisli olmali 1 cikis w ve 1 ve 4 % giris wref ve Td secildi. figure; h=bodeplot(cl_ff,cl_rloc,cl_lqr); 1/41.
22 % Grafikle ilgili eksenleri isimlendirmede problem oldugu icin yeniden % isimlendirme yaptik. Frekans birimini Hz degistirdik, karisiklik % olmamasi acisindan. Bu LTI objeleri anlamak acisindan iyi bir uygulamadir P=getoptions(h); P.FreqUnits = 'Hz'; P.Title.String='Transfer Fonksiyonlarina Ait Bode Grafigi'; P.XLabel.String='Frekans (acisal frekans degil)'; P.YLabel.String={'Faz Farki (derece)','genlik (db)'}; setoptions(h,p); legend('ileribesleme','geribesleme (rlocus)','geribesleme (LQR)','Location','NorthEastOutside') % üç sisteme ait asimptotik bode grafigi burada frekansa (not açisal % frekans degil) göre üç sistemin degisimi gozlenmektedir. Bundan dolayi x % ekseninin birimini Hz olarak kullanacagiz ust satir genligi alt satir faz % farkini göstermektedir. Sol tarafdaki grafiklerde I/O wref to w, sag % tarafdaki grafiklerde I/O Td to w transfer fonksiyonlari bunlara gore % ayarlandi. figure; h = lsimplot(cl_ff,cl_rloc,cl_lqr,u,t); title('ileri besleme ve geri beslemeli sistemlerin acisal hizinin tork degisimine olan tepkisi') legend('ileribesleme','geribesleme (rlocus)','geribesleme (LQR)','Location','NorthWest') Şekil19 /41.

23 Şekil Şekil1 3/41.
24 Şekil Şekil3 4/41.
25 Şekil4 Şekil5 5/41.
26 Şekil6 Yer Kök Eğrileri R ( s) K H(s) V ( s) B(s) Şekil7 V (s) K H ( s) = B (s)=1 için R(s ) 1+K H (s) Kapalı çevrim sistemin kutupları 1+KH(s)= özyapısal denkleminden elde edilir. b ( s) a(s ) H (s)= a ( s)+ K b (s)= +b(s)= a ( s) K n a(s) polinomunun en büyük derecesi ve m b(s) polinomunun en büyük derecesidir. K sıfıra doğru yaklaştıkca a(s)='dır kapalı çevrim sistemin kutupları H(s)'in kutuplarıdır, benzer şekilde K sonsuza doğru yaklaştıkca b(s)='dır kapalı çevrim sistemin kutupları H(s)'in sıfırlarıdır. Kapalı çevrim sistem n kutba sahiptir. Bundan dolayı köklerin yer eğrisi yada yer kök eğrisi n kola sahiptir. Her kol üzerinde kazanç 'dan büyükdür, kollar dışında kazanç 'dan küçükdür (bu kısımla ilgilenmeyiz). Her kol, gerçel eksene göre bir açıyla (çıkış açısı), H(s)'in kutuplarıyla başlar ve, gerçel eksene göre bir açıyla (varış açısı), H(s) sıfırlarına doğru gider. Eğer H(s)'in kutup sayısı sıfır sayısından fazla ise H(s) sonsuzda n-m sıfıra sahipdir, bundan dolayı H(s)'in limiti sıfırdır. Bu durumda yer kök eğrisinin asimptotlarının (sonsuza giden kol) sayısı kutup sayısından sıfır sayısı 6/41.
27 çıkarılarak bulunur. Rlocus() fonksiyonuyla yer kök eğrisi MATLAB'da çizilebilir. Parametre olarak transfer fonksonuna ait pay ve payda katsayıları yada durum eşitliklerine ait A,B,C,D matrisleri girilebilir. Yer kök eğrisi gerçel eksene göre simetrikdir. Yer kök yer eğrilerinin gerçel eksene göre simetrik olmalarından dolayı varış ve çıkış noktaları ya gerçel eksen üzerinde yada sanal çift halinde s (konjuge) düzlemi üzerinde bulunurlar. Eğer kök yer eğrisi gerçel eksen üzerinde yer alan iki kutup arasında yer alıyorsa bu iki kutup arasında en azından 1 çıkış noktası vardır. Benzer şekilde kök yer eğrisi gerçel eksen üzerinde yer alan iki sıfır arasında yer alıyorsa bu iki kutup arasında en azından 1 varış noktası vardır. Sanal eksene yakın olan kutuplar (yada kollar) kapalı çevrim dinamik sistemin kararlılığı ve dinamik davranışı üzerinde, en büyük aşım artacağından ve sönümleme azalacağından dolayı, daha büyük etkiye sahipdir ve baskın kol olarak adlandırılırlar. Bundan dolayı kutupların konumuna göre sistem 1. veya. dereceden sistem gibi davranabilir. Bu noktada n. dereceden sistemlere ait tepkileri hatırlamak gereklidir. Birinci dereceden sistemin basamak tepkisinde birinci terim zorlanmış tepki (kararlı halde) ve ikinci terim doğal tepki (geçici halde) olarak iki kısımdan oluşmaktadır. Sistem sınırlamaları c(t) üzerinde belirtilir. K C (s) K t / τ τ G( s)= = R ( s)=u (t) için C ( s)= c (t )= K (1 e ) u( t) R( s) 1+ τ s s ( s+1/ τ) İkinci dereceden sistemin transfer fonksiyonu doğal frekans ve sönümleme parametrelerini içermektedir. Sistem üzerinde olan tasarım ölçütleri dikkate alındığında aşağıdaki denklemler elde edilir. Şekil8'de verilen S düzlemi en büyük aşım, yerleşme ve yükselme zamanı sınırlamalarını karşılamaktadır. C ( s) w n = s= ζ w n± j wn 1 ζ kutuplar R( s) s + ζ w n s+w n ζ>1, aşırı sönümleme, iki reel ayrık kutup ζ<1, sönümlenmemiş durum, konjuge kutuplar ζ=1, kritik sönümleme, aynı yerde iki kutup 1 Basamak tepkisi R( s)= ve başlangıç koşulları s ζ ( s+ζ w n)+ wn 1 ζ wn 1 1 ζ C ( s)= C (s )= + s s ( s + ζ w n s+w n ) ( s+ζ wn )+w n (1 ζ ) 1 L 1 c (t)=1 e ζ w t cos (w n 1 ζ t α), α=arctan (ζ / 1 ζ )=arccos( ζ) 1 ζ wn wn s C (s)= L 1 c (t)= e ζ w t sin(w n 1 ζ t) ( s+ζ w n ) +w n (1 ζ ) 1 ζ π T p= en büyük aşım zamanı,c (t )' nin zamana göre türevi sıfıra eşitlenerek bulunur w n 1 ζ G( s)= n n M p =1+e ζ π / 1 ζ =1+e π/ tan (α) M p en büyük aşım α=arctan (ζ / 1 ζ )=arccos(ζ ) en büyük aşım zamanı, c (t)' de yerine koyulduğunda bulunur. yani c(t p ) ln(. 1 ζ ) k ζ π/ 1 ζ %± hata için yerleşme zamanı 1.=1+e T s= T s= k =4 ζ w n ζ w n ζ+.917 ζ Yükselme zamanı T r = <ζ<1 wn c (t) ' nin son değerinin 1 değerinden 9 değerine ulaşdığı zamandır 7/41.
28 Şekil8 Örneğin verilen sistem için %5 den az aşım ve 1 s yükselme zamanı, kutuplar taralı bölgede olacak şekilde K orantısal kazanç değerini değiştirerek elde edilebilir. Zeta sönümleme oranı ve wn doğal frekansdır. clc; num=[1 5]; denum=[ ]; [z,p,k]=tfzpk(num,denum) rlocus(num,denum); axis('equal'); axis([ ]) zeta=.7; wn=1.8; sgrid(zeta,wn) [kd,poles]=rlocfind(num,denum) title('kok Yer Egrisi') [num, den]=cloop((kd)*num,denum) figure(); step(num,den) >> z= -5 p= i i i k= 1 Select a point in the graphics window selected_point = i 8/41.
29 kd = poles = i i i i Şekil9 Şekil3 (1 dereceden sisteme benzer cevap) 9/41.
30 Şekil31 ( dereceden sisteme benzer cevap) W n 1.8 Tr ζ ln(m p ) π ln(m p ) 1+ π T r yükselme zamanı, M p % olarak en büyük aşım Yukarıdaki denklemden, %5 den az aşım ve 1 s yükselme zamanı için, sönümleme oranının.7'den daha büyük olması ve doğal frekansın 1.8 den büyük olması gereklidir. Şekil9'daki 45 derecelik zeta=.7 karşılık gelen kesikli iki çizginin arasında zeta>.7 ve kesikli yarım çember wn=1.8 dışında wn>1.8. Bu iki bölgenin kesişimi dizaynla ilgili sınırlamaları karşılayan kutup değerlerini vermektedir ve MATLAB'da sgrid(zeta,wn) şeklinde bulunmaktadır. Bu bölgeden istediğiniz değeri tıklayarak seçebilirsiniz. Şekil3'da birim basamak tepkisine olan cevabın sınırlamaları karşıladığı gösterilmiştir. Verilen yer kök eğrisi için i, i, ve açık çevrim kutuplarından başlayan 4 adet kol vardır. Kollardan biri -5'de olan açık çevrim sıfırında son bulur. Diğer üç kol K sonsuza giderken (3 adet sıfır burada bulunmaktadır) sonsuza gider. K= iken Açık çevrim kutuplarının toplamı -4 dır. Kutup sayısı sıfır sayısından daha fazla olduğundan K değişirken kutupların toplamı sabit kalır. (rlocfind() ile seçilen noktaya göre tüm kutupların toplamının -4 olarak sabit kaldığı görülmektedir). Yine aynı şekilde kutıpların sağ yarı düzleme geçdiği değerler rlocfind() komutu ile istenilen noktanın üzerine tıklanarak MATLAB'da bulunabilir. Kolların yönleri z i = r i z i açık çevrim kutupları r i öz yapısal denklemin kökleri kutupların toplamının sabit kalmasını sağlayacak şekildedir. Gerçek eksen üzerindeki kolları bulmak için açık çevrim kutup ve sıfırlarına bakılır. Gerçel eksen 3/41.
31 üzerindeki en solda yer alan sıfır yada kutup'un sağında yer alan kutup ve sıfır sayısı tek ise o bölgeden yer kök eğrisi geçmektedir, eğer çiftse o bölgeden yer kök eğrisi geçmemektedir. Bu işlem en sağdaki sıfır yada kutup'a kadar devam eder ve bu işleme sanal kutup yada sıfırlar dahil edilmez. Örneğe baktığımızda -5 deki sıfırın sağında 3 tane kutup bulunmaktadır, bundan dolayı gerçel eksen üzerindeki -5'in solundaki bu bölgeden yer kök eğrisi geçmektedir. Diğer durumlar benzer şekilde bulunabilir. 18 ( k +1) α= yer kök eğrisine ait asimptot açıları k =,1,,, n m 1 n m kutupi sıfır i asimptotların gerçel eksenden geçdiği noktalar σ= n m G=[( )-(-5)]/(4-1)=-35/3=-11.7 noktasında yer kök eğrisine ait asimptotlar kesişirler. Asimptot açıları 6(k+1)=6,18,3(-6) derecedir. Yer kök eğrisinin gerçel eksenden ayrılma noktası 1+KH(s)= özyapısal denklem eşitliğinden K elde edildikten sonra, türevi sıfıra eşitlenerek s değerleri bulunur. K (σ) H (σ)/ σ H (σ) 1 1+K H (s)= K (σ)=( ) = = = σ ' lar bulunur σ σ H (σ) H (σ) [(s+5)/(s^4+4*s^3+5*s^+15*s)]'= i -.93, -17.1, i, Gerçel ekseni ayrılma noktaları -.93 ve dir. Kutupların yada sıfırların (varış) çıkış açıları, yer kök eğrisi üzerinde bulunan herhangi bir s noktasına açı koşulu uygulanarak bulunabilir. Test edilen nokta için sıfırların açılarından kutupların ang (s+5) ang ( s i) ang ( s i) ang (s) ang (s+4.34)=18, k = s= yakınındaki bir nokta test edildiğinde θ=18 yada 18 s= 4.34 yakınındaki bir nokta test edildiğinde θ 4.34=18 18= s= 5 yakınındaki bir nokta test edildiğinde θ 5=18 36= 18 yada 18 s= i yakınındaki bir nokta test edildiğinde θ i = s= i yakınındaki bir nokta test edildiğinde θ i =74.69 açıları çıkarılarak istenilen kutup'a yada sıfıra ait ayrılama açısı bulunabilir. Eşlenik kutupların açıları ters işaretlidir. θ z θ p =( k+1) 18 i i kutup'undan sol tarafa doğru K değeri artmaktadır ve çıkış açısı gerçel eksene göre 18 derecedir kutup'undan sağ tarafa doğru K değeri artmaktadır ve çıkış açısı gerçel eksene göre derecedir. -5 sıfır'ından sol tarafa doğru K değeri artmaktadır ve çıkış açısı gerçel eksene göre 18 derecedir i kutup'undan güneydoğu yönünde K değeri artmaktadır ve çıkış açısı gerçel eksene göre derecedir i kutup'undan kuzeydoğu yönünde K değeri artmaktadır ve çıkış açısı gerçel eksene göre derecedir. Gene bu durumları MATLAB'da yer kök eğrisi üzerine tıklayarak ve ilgili renkli yer kök eğrisini takip ederek teyid edebilirsiniz. Kök yer eğrisinin sanal ekseni kesdiği noktaları bulmak için Routh-Hourwitz kararlılık koşulu uygulanır. 1+KH(s)= den kararlılık sınırındaki k değeri ve buradan s'in sanal ekseni kesdiği noktalar bulunur. 4 3 s +4 s +5 s +(15+k ) s+5 K = s4 s3 s s k 4 (15+K ) 185 K 5 K 4 8 K (15+K ) 185 K 5 K 31/41.
32 8 K (15+ K )) s= = K +9 K +775 K=1148, 48 K> olmalı 185 K Örneğin tabloya ait üçüncü satır (4x5-(15+K)x1)/4 şeklinde yazılır. ( 185 K ) s +5 K = K =1148için =77 s +856 s= i, i 4 s satırına ait denklem çözüldüğünde, yer kök eğrisi sanal ekseni K=1148 iken keser, ve s^ satırına ait denklem çözüldüğünde, yer kök eğrisi sanal ekseni i, i noktalarında keser. Farklı sayıda gerçel yada sanal kutup ve sıfır olması durumunda, benzer şekilde yer kök eğrisi bulunabilir. Sisteme bir kutup ilavesi baskın kutup'u sağ yarı düzleme doğru ve sıfır ilavesi baskın kutup'u sol yarı düzleme doğru hareket ettirir. Grafiklerden de anlaşılacağı gibi yer kök eğrileri geçici ve durağan hal tepkilerine ait bilgileri ortaya koyar. Diğer tarafda bode grafikleri sadece durağan tepkisiyle ilgilenmektedir. Bundan dolayı yer kök eğrileri daha iyi analiz imkanı sağladığını söyleyebiliriz. ( Routh Hourwitz Kararlılık Testi Bu test karakteristik denkleme ait köklerin sağ yarı düzlemde yer alıp almadığını belirler ve sanal eksen üzerinde bulunan ve sağ yarı düzlemde bulunan köklerin sayısını verir. H(s) polinomuna ait köklerin sol yarı düzlemde bulunabilmesi için polinomdaki tüm katsayılar aynı işaretli olmalıdır ve hiçbir katsayı sıfır olmamalıdır. Bu yeterli koşul değildir ve kararlılık testi için Routh-Hourwitz testi uygulanmaktadır. 4 3 H (s)=a 4 s +a 3 s +a s +a 1 s+a s4 s3 s s 1 a4 a3 a a a a A= a3 A a1 a 3 B C= A C B a 4 D= =B C a a a1 a a a B= 3 4 =a a3 Eğer ilk sütundaki elemanların tümü aynı işaretiyse köklerin tümü sol yarı düzlemdedir. Eğer ilk sütundaki elemanların işaretleri değişiyorsa, işaret değişimi kadar sağ yarı düzlemde kök vardır. Herhangi bir satırın ilk elemanı olması durumunda diğer elemanların sonsuz olaması durumu ortaya çıkmaktadır. Bu sorunu aşmak için yerine e gibi sembolik bir sayı yazılır ve diğer işlemlere devam edilir. Tüm satır sıfır ise sanal eksen üzerinde kök vardır. Bu durumda teste devam edebilmek için ilgili satırın bir üst satırındaki katsayılarla yardımcı denklem oluşturulur A(s) ve A'(s)= işlemlerinden sonra katsayılar ilgili satıra yazılarak işleme devam edilir. P ( s)=s 5+4 s 4+8 s 3+8 s +7 s+4 İşaret değişimi yok, sistem kararlı ve sanal eksen üzerinde iki katlı kök var. 4 s +4= s=± j 3/41.
33 s5 4 s 3 s s s1 s s Nyquist Kararlılık Testi ve Grafikleri Nyquist grafiği, pozitif yada negatif herhangi bir frekansa karşılık G(jw) değeri gerçel ve sanal olarak x-y düzleminde gösterilerek oluşturulur (polar grafik olarakda düşünülebilir). Bu grafikde w ve sonsuz iken G(jw) değeri ve grafiğin gerçel (Im(G(jw))=, Re(G(jw))) ve sanal (Re(G(jw))=, Im(G(jw))) eksenle kesişimleri önemlidir. clc; tau1=1; tau=1/1; num=[1]; denum=conv([tau1*1 1],[tau*1 1]); tf(num,denum) nyquist(num,denum) Şekil3 Matlab'da sağ tıklayarak grafiğin (-1,) noktasına zoom yapabilirsiniz yada grid opsiyonunu aktif hale getirebilirsiniz. Nyquist kararlılık testi, kapalı çevrim bir sistemin kararlılığını grafiksel olarak gerçel ve sanal eksen üzerinde, w dan sonsuza artarken (yada -sonsuza) açık çevrim transfer fonksiyonunu G(jw)H(jw) (-1,) noktasına karşı inceleyerek ortaya koymaktadır, şekil33 sağdaki grafik bu durumu 33/41.
34 özetlemektedir. (Benzer şekilde açık çevrim transfer fonksiyonunun kararlılığını, G(jw)H(jw) (,) noktasına karşı inceleyerek ortaya koymaktadır, şekil33 soldaki grafik durumu özetlemektedir). Kararlılık testinde oluşturulan grafiklerde Nyquist kapalı çevresi sağ yarı s düzlemi G(jw)H(jw) kutuplarının üzerinden geçmeden çevresini dolaşacak şekilde kapsar. Şekil33 Basitleştirilmiş Nyquist kararlılık testi ω dan a giderken, açık-döngü frekans tepkisi G(jω)H(jω) yer eğrisi, -1 noktasını kapasamayan kapalı-döngü sistemler, kararlıdır, -1 noktasını kapsayan sistemler kararsızdır ve -1 noktasından geçen sistemler marjinal kararlıdır.(şekil34) Noktayı kapsamak, noktanın soluna geçmek olarak alınabilir. Bu durum açık döngüsü kararlı sistemler için geçerlidir. (s düzleminin sağ tarafında kutup'u olmayan açık döngü sistemler için geçerlidir) Şekil34 34/41.
35 Açık çevrim G(s) H ( s )için kararlılık N =Z P P = ile N ; G(s ) H ( s) Nyquist grafiğinin(,) etrafındaki çevrim sayısı, saat yönünün tersiise pozitif Z ; Nyquist çevrimiyle çevrelenen G(s ) H ( s) sıfırlarının sayısı P ; Nyquist çevrimiyle çevrelenen G (s) H ( s) kutuplarının sayısı Kapalı çevrim G ( s)/1+g(s ) H ( s)için kararlılık N 1=Z 1 P 1 Z 1= ile N 1 ; G(s) H ( s) Nyquist grafiğinin ( 1,) etrafındaki çevrim sayısı, saat yönünün tersiise pozitif Z 1 ; Nyquist çevrimiyle çevrelenen 1+G(s ) H ( s) sıfırların sayısı P 1 ; Nyquist çevrimiyle çevrelenen 1+G ( s) H ( s) kutupların sayısı Açık ve kapalı çevrim kutupları aynıdır P 1= P Açık çevrim sistemin G(s)H(s) kararlı olması için, G(s)H(s) Nyquist grafiğinin (,) noktasını çevrim sayısı ile sağ yarı düzlemdeki G(s)H(s) sıfırların sayısına eşit olmalıdır. N =Z olmalıdır. Kapalı çevrim sistemin G(s)H(s) kararlı olması için, G(s)H(s) Nyquist grafiğinin (-1,) noktasını saat yönünde çevrim sayısı ile sağ yarı düzlemdeki kapsanan G(s)H(s) kutuplarının sayısına eşit olmalıdır. N 1= P 1 = P Kazanç geçiş frekansı G(jWgm)H(jWgm) =1 koşulundaki Wgm frekansıdır, ve faz geçiş frekansı ang(g(jwpm)h(jwpm))=18 dereceye eşit olduğu durumdaki Wpm frekansıdır. Kazanç marjini Gm=log(1/ G(jWgm)H(jWgm) ) db, faz marjini Pm=18+ang(G(jWpm)H(jWpm)). clc; num=[1]; denum=conv(conv([1 1],[1 1]),[1 1]); isstable(tf(num,denum)) nyquist(num,denum) [Gm,Pm,Wgm,Wpm]=margin(num,denum) Şekil35 35/41.
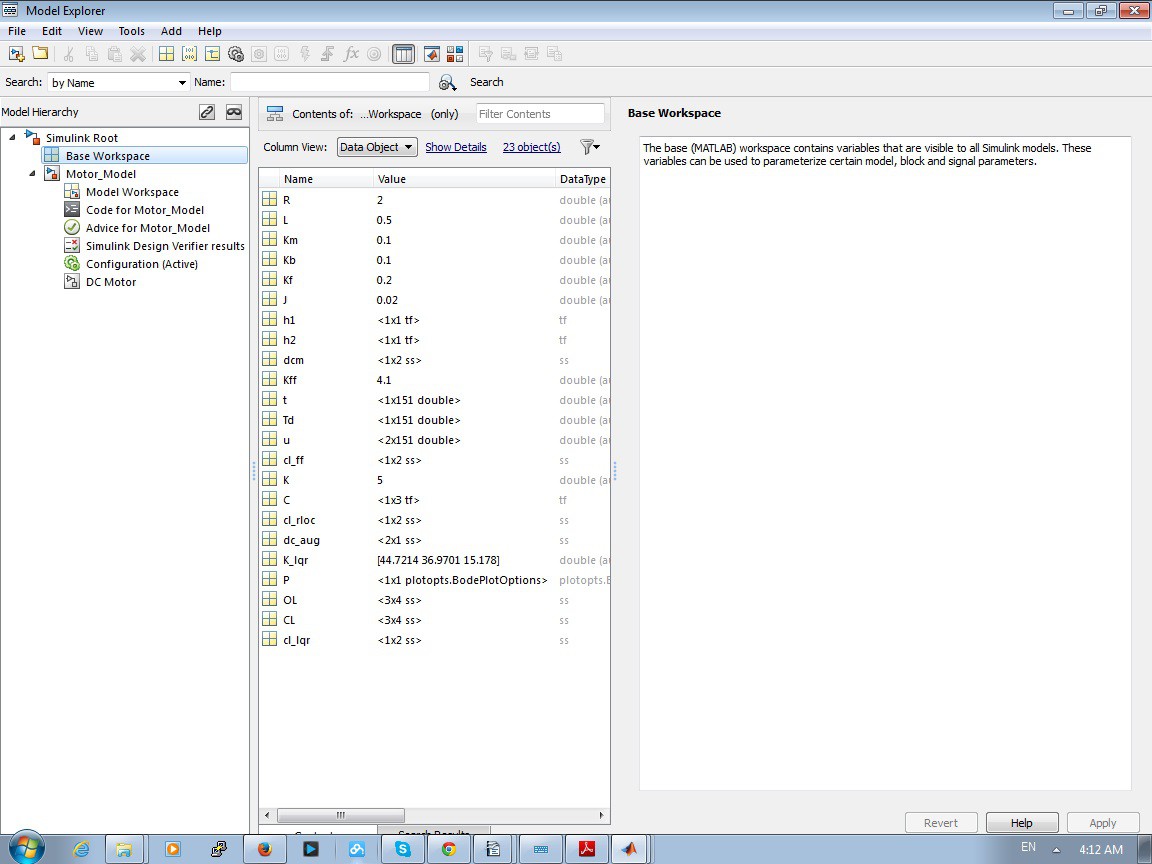
36 Doğrusal İkinci Dereceden Düzenleyici Kontrolör (Linear Quadratic Regulator (LQR)) LQR bir dinamik sistemin optimum kontrolü konusunda karşımıza çıkan bir problemdir. Bir sistemin optimum kontrol için ikinci dereceden bir maliyet fonksiyonuyla tanımlanması ve lineer diferansiyel denklemlerle ortaya konması, LQ problem olarak adlandırılmıştır. Kontrol teorisinde temel problemlerden biri olan LQ, geribeslemeli bir sistemi durum değişkenlerini kullanarak ve sistem sınırlamalarını göz önünde bulundurarak en efektif şekilde ortaya koyan düzenleyici bir kontrol sistemidir. Maliyet fonksiyonu, durum değişkenleriyle oluşturulan fonksiyonlardan ve bunların toplamlardan oluşur. İşlem karmaşıklığını önlemek için dizaynı yapan kişi maliyeti azaltan algoritmaya ihtiyaç duyulan verileri, yani ağırlık katsayılarını atayarak sistemi oluşturmaya çalışmaktadır. Bu maliyet fonksiyonu sistemde istenilen değerlerin değişimini en aza indirmektedir (bizim örneğimizde açısal hız). Bunun yanında, dizaynı yapan kişiye düşen ağırlık katsayılarını değiştirip, bir kaç iterasyon yaparak, sisteme ait tüm sınırlamalar açısından en efektif çözümü bulmakdır. Bulduğumuz F (geribesleme) için, J maliyet fonksiyonunun minimum olması istenir. Q ve R ağırlık katsayılarını göstermektedir. Q nxn simetrik pozitif yarıtanımlı (symmetric positive semidefinite), R mxm simetrik pozitif tanımlı (symmetric positive definite) birer matrisdir. x = A x+b u ; u=f x ; F geribesleme ; J = [ x T (t) Q x (t)+ut (t) R u( t)] dt ve Q=M T M. Q yukarıda belirtildiği gibi yazılabilir. M pxn p<=n matisdir. Doğal olarak LQR kontrolörün kararlı (Stabilizable) olması istenir, bunun için (A,B) çiftinin kararlı olması gereklidir. (A,M) çifti de tespit edilebilir (detectable) olmalıdır. ARE (Algebric Ricatti Equation) çözümü W simetrik pozitif yarıtanımlı (symmetric positive definite) bir matrisdir. W bulunduğunda F de bulunmuş olur. (Daha fazla ayrıntılı matmatiksel bilgi ve altyapı için başka kaynaklara bakınız.) 1 T T 1 T F = R B W ; W A+ A W +Q W B R R W =( ARE ) ; DC motor kontrolünde kullanılan maliyet fonksiyonunu incelemek burada yararlı olacakdır. Bu fonksiyon uygulanan torka karşı açısal hızdaki değişimi (disturbance rejection)minimuma indirmektedir (integral hatası olarak da düşünülebilir). Dikkat edileceği üzere akım i(t) ve açısal hız w(t) katsayıları Va(t) ait olanlardan dan daha büyükdür. Daha büyük katsayılar daha iyi sonuç verecekdir. Lqry() fonksiyonu bize optimum geribesleme kazanç değerlerini vermektedir. Sizde değişik maliyet fonksiyonlarıyla sistemler elde etmek için değişik katsayı matrisleri uygulayınız. w( t) J = [ i (t)+w (t)+.1 V A (t)] dt V A (t )=K 1 w( t)+k +K 3 i( t) s [ ] [] Q= 1 ; R=[.1 ] x= w ; u=[ V A ] ; i Simulink Aracılığıyla Doğru Akım Motor Modelleme ve Simülasyon Doğru akım motorunu ait Matlab'da yapılan modelleme ve simülasyon aynı şekilde Simulink aracılığıyla da yapılabilir. Simulink Library Browser'ı açmak için Şekil15'de görünen Matlab ekranında, Simulink Library kısayoluna tıklayınız. Aynı şekilde, Matlab Command Line kısmında >>simulink komutunu yazılınca Simulink açılır. Açılan pencerede File -> New seçerek kendi modelinizi oluşturmak için boş bir çalışma sayfası açabilirsiniz. Şekil36'de görünen Simulink Library Browser aracılığıyla istediğiniz model bloğunu seçerek çalışma sayfanıza sürükleyiniz. Daha sonra seçilen modellere ait giriş çıkış pinleri birbirine bağlayınız ve bloklara ait parametreleri atayınız. Bağlantıları yaparken dikkat edilmesi gereken bir husus modellerin bazıları giriş, bazıları çıkış, ve diğer kısmıda hem giriş hem çıkış özelliğine sahip olmasıdır. Bundan sonra oluşturduğunuz çalışmanın simülasyonunu yapabilirsiniz. Oluşturduğunuz modelin üzerine 36/41.
37 tıklayarak alt modelleri görebilirsiniz. Şekil36'da bir doğru akım motoruna ait oluşturulan dizayn ve Library browser gösterilmiştir. Simülasyonu çalıştırmak için modellere atanan değişkenlere ait değerler View-> Model Explorer -> Base Workspace den ayarlanabilir, şekil37'de değişkenlere atanan değerler gösterilmiştir. Simulation-> Configuration Parameters kısmından uzun süre beklememek için simülasyon süresi stop time.s ve solver ode15 ayarlanabilir (şekil38). Simulink modeline ait denklemler aşağıda verilmiştir. Simülasyonu yapmadan önce blok diyagramın girişine step, çıkışına scope, şekil39'daki gibi bağlanır ve step için step time, initial value ve final value 1'e ayarlanır. Run tuşuna basılarak simülasyon çalıştırılır ve scope üzerinde tıklanarak sistemin tepkisi görülebilir, daha net görüntü için autoscale tuşuna basınız. Şekil4'da sistemin tepkisi görülmektedir, bununla birlikte Simulink Profile Summary Report'da gözükmektedir. Ayrıca bağlantıların üzerine çift tıklayarak çalışmanızı anlaşılabilir kılmak açısından isimlendirme yapabilirsiniz. Şekil36 37/41.

38 Şekil37 Şekil38 38/41.
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
2 LAPLACE VE TERS LAPLACE DÖNÜŞÜMÜ... 6 LİNEER ZAMANLA DEĞİŞMEYEN SİSTEMLER (LİNEAR TİME INVARİANT SYSTEMS (LTI))...
)...") İçerik Tablosu KONTROL SİSTEMLERİNİN TEMELLERİ... 2 TEMELLERİ...2 LAPLACE VE TERS LAPLACE DÖNÜŞÜMÜ... 6 DÖNÜŞÜMÜ...6 LİNEER ZAMANLA DEĞİŞMEYEN SİSTEMLER (LİNEAR TİME INVARİANT SYSTEMS (LTI))... 8 (LTI))...8
İçerik Tablosu KONTROL SİSTEMLERİNİN TEMELLERİ... 2 TEMELLERİ...2 LAPLACE VE TERS LAPLACE DÖNÜŞÜMÜ... 6 DÖNÜŞÜMÜ...6 LİNEER ZAMANLA DEĞİŞMEYEN SİSTEMLER (LİNEAR TİME INVARİANT SYSTEMS (LTI))... 8 (LTI))...8
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
Bu uygulama saatinde, dinamik sistemlerin simülasyonu (benzetimi) için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır.
 için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır.") Bu uygulama saatinde, dinamik sistemlerin simülasyonu (benzetimi) için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır. Simulink bir Grafik Kullanıcı Arayüzü (Graphical User
Bu uygulama saatinde, dinamik sistemlerin simülasyonu (benzetimi) için geliştirilmiş olan, oldukça kullanışlı bir arayüz, Simulink, tanıtılacaktır. Simulink bir Grafik Kullanıcı Arayüzü (Graphical User
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4B: DC MOTOR TRANSFER FONKSİYONU VE PARAMETRELERİNİN ELDE EDİLMESİ
 Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
ELN3052 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - 2 TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI:
 ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
Kontrol Sistemlerinin Analizi
 Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Contents. Doğrusal sistemler için kontrol tasarım yaklaşımları
 Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
MATLAB a GİRİŞ. Doç. Dr. Mehmet İTİK. Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü
 MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
4. Sunum: AC Kalıcı Durum Analizi. Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık
 4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
4. Sunum: AC Kalıcı Durum Analizi Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Giriş Aşağıdaki şekillere ve ifadelere bakalım ve daha önceki derslerimizden
Deney 5 : Ayrık Filtre Tasarımı. Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç
 İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
Enerji Sistemleri Mühendisliği Bölümü
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-II RL, RC ve RLC DEVRELERİNİN AC ANALİZİ Puanlandırma Sistemi: Hazırlık Soruları:
Türev Uygulamaları ÜNİTE. Amaçlar. İçindekiler. Yazar Prof.Dr. Vakıf CAFEROV
 Türev Uygulamaları Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 10 Amaçlar Bu üniteyi çalıştıktan sonra; türev kavramı yardımı ile fonksiyonun monotonluğunu, ekstremum noktalarını, konvekslik ve konkavlığını, büküm
Türev Uygulamaları Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 10 Amaçlar Bu üniteyi çalıştıktan sonra; türev kavramı yardımı ile fonksiyonun monotonluğunu, ekstremum noktalarını, konvekslik ve konkavlığını, büküm
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
Cadence OrCAD Kurulum ve Simulasyon
 Cadence OrCAD Kurulum ve Simulasyon http://www.cadence.com/products/orcad/pages/downloads.aspx Yukarida belirtilen link uzerinden, Cadence programlarinin demo versiyonlarini indirebilirsiniz. Sadece yapacagınız
Cadence OrCAD Kurulum ve Simulasyon http://www.cadence.com/products/orcad/pages/downloads.aspx Yukarida belirtilen link uzerinden, Cadence programlarinin demo versiyonlarini indirebilirsiniz. Sadece yapacagınız
MATLAB'dan doğrusal sistemlerin matematiksel modellemesi için transfer fonksiyonu, sıfırkutup-kazanç, durum uzayı vs. gösterimler kullanılabilir.
 Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
ALTERNATİF AKIMIN DENKLEMİ
 1 ALTERNATİF AKIMIN DENKLEMİ Ani ve Maksimum Değerler Alternatif akımın elde edilişi incelendiğinde iletkenin 90 ve 270 lik dönme hareketinin sonunda maksimum emk nın indüklendiği görülür. Alternatif akımın
1 ALTERNATİF AKIMIN DENKLEMİ Ani ve Maksimum Değerler Alternatif akımın elde edilişi incelendiğinde iletkenin 90 ve 270 lik dönme hareketinin sonunda maksimum emk nın indüklendiği görülür. Alternatif akımın
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
MATLAB/Simulink ile Sistem Modellemesine Giriş
 MATLAB/Simulink ile Sistem Modellemesine Giriş Seminer Notları 2017-2018 Güz Dönemi Arş. Gör. Abdurrahim Dal 1. GİRİŞ Günümüzde, mühendislik sistemlerinin benzetimlerinin (simülasyonlarının) önemi gün
MATLAB/Simulink ile Sistem Modellemesine Giriş Seminer Notları 2017-2018 Güz Dönemi Arş. Gör. Abdurrahim Dal 1. GİRİŞ Günümüzde, mühendislik sistemlerinin benzetimlerinin (simülasyonlarının) önemi gün
ANALOG ELEKTRONİK - II. Opampla gerçekleştirilen bir türev alıcı (differantiator) çalışmasını ve özellikleri incelenecektir.
 çalışmasını ve özellikleri incelenecektir.") BÖLÜM 6 TÜREV ALICI DEVRE KONU: Opampla gerçekleştirilen bir türev alıcı (differantiator) çalışmasını ve özellikleri incelenecektir. GEREKLİ DONANIM: Multimetre (Sayısal veya Analog) Güç Kaynağı: ±12V
BÖLÜM 6 TÜREV ALICI DEVRE KONU: Opampla gerçekleştirilen bir türev alıcı (differantiator) çalışmasını ve özellikleri incelenecektir. GEREKLİ DONANIM: Multimetre (Sayısal veya Analog) Güç Kaynağı: ±12V
Sistem Dinamiği. Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem
Sistem Dinamiği Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
ALTERNATİF AKIMIN TEMEL ESASLARI
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI
 DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
DENEY 3: DTMF İŞARETLERİN ÜRETİLMESİ VE ALGILANMASI AMAÇ: DTMF işaretlerin yapısının, üretim ve algılanmasının incelenmesi. MALZEMELER TP5088 ya da KS58015 M8870-01 ya da M8870-02 (diğer eşdeğer entegreler
MEB YÖK MESLEK YÜKSEKOKULLARI PROGRAM GELĐŞTĐRME PROJESĐ. 1. Endüstride kullanılan Otomatik Kontrolun temel kavramlarını açıklayabilme.
 PROGRAMIN ADI DERSĐN ADI DERSĐN ĐŞLENECEĞĐ YARIYIL HAFTALIK DERS SAATĐ DERSĐN SÜRESĐ ENDÜSTRĐYEL OTOMASYON SÜREÇ KONTROL 2. Yıl III. Yarıyıl 4 (Teori: 3, Uygulama: 1, Kredi:4) 56 Saat AMAÇLAR 1. Endüstride
PROGRAMIN ADI DERSĐN ADI DERSĐN ĐŞLENECEĞĐ YARIYIL HAFTALIK DERS SAATĐ DERSĐN SÜRESĐ ENDÜSTRĐYEL OTOMASYON SÜREÇ KONTROL 2. Yıl III. Yarıyıl 4 (Teori: 3, Uygulama: 1, Kredi:4) 56 Saat AMAÇLAR 1. Endüstride
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI. Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
ALTERNATİF AKIM (AC) II SİNÜSOİDAL DALGA; KAREKTRİSTİK ÖZELLİKLERİ
 II SİNÜSOİDAL DALGA; KAREKTRİSTİK ÖZELLİKLERİ") . Amaçlar: EEM DENEY ALERNAİF AKIM (AC) II SİNÜSOİDAL DALGA; KAREKRİSİK ÖZELLİKLERİ Fonksiyon (işaret) jeneratörü kullanılarak sinüsoidal dalganın oluşturulması. Frekans (f), eriyot () ve açısal frekans
. Amaçlar: EEM DENEY ALERNAİF AKIM (AC) II SİNÜSOİDAL DALGA; KAREKRİSİK ÖZELLİKLERİ Fonksiyon (işaret) jeneratörü kullanılarak sinüsoidal dalganın oluşturulması. Frekans (f), eriyot () ve açısal frekans
Mat-Lab ile Kök Yer Eğrileri
 Mat-Lab ile Kök Yer Eğrileri Prof.Dr. Galip Cansever 1 MatLab ile Kök yer eğrisi çiziminde num = = num 1 + K = 0 den ( s s m + z 1 b s 1 )( s m 1 z m formunu kullanacağız. )...( s +... + b m z m ) den
Mat-Lab ile Kök Yer Eğrileri Prof.Dr. Galip Cansever 1 MatLab ile Kök yer eğrisi çiziminde num = = num 1 + K = 0 den ( s s m + z 1 b s 1 )( s m 1 z m formunu kullanacağız. )...( s +... + b m z m ) den
ELK273 Elektrik ve Elektronik Mühendisliğinin Temelleri Ders 8- AC Devreler. Yard.Doç.Dr. Ahmet Özkurt.
 ELK273 Elektrik ve Elektronik Mühendisliğinin Temelleri Ders 8- AC Devreler Yard.Doç.Dr. Ahmet Özkurt Ahmet.ozkurt@deu.edu.tr http://ahmetozkurt.net İçerik AC ve DC Empedans RMS değeri Bobin ve kondansatörün
ELK273 Elektrik ve Elektronik Mühendisliğinin Temelleri Ders 8- AC Devreler Yard.Doç.Dr. Ahmet Özkurt Ahmet.ozkurt@deu.edu.tr http://ahmetozkurt.net İçerik AC ve DC Empedans RMS değeri Bobin ve kondansatörün
İşaret ve Sistemler. Ders 2: Spektral Analize Giriş
 İşaret ve Sistemler Ders 2: Spektral Analize Giriş Spektral Analiz A 1.Cos (2 f 1 t+ 1 ) ile belirtilen işaret: f 1 Hz frekansında, A 1 genliğinde ve fazı da Cos(2 f 1 t) ye göre 1 olan parametrelere sahiptir.
İşaret ve Sistemler Ders 2: Spektral Analize Giriş Spektral Analiz A 1.Cos (2 f 1 t+ 1 ) ile belirtilen işaret: f 1 Hz frekansında, A 1 genliğinde ve fazı da Cos(2 f 1 t) ye göre 1 olan parametrelere sahiptir.
Ders # Otomatik Kontrol. Kök Yer Eğrileri. Prof.Dr.Galip Cansever. Otomatik Kontrol. Prof.Dr.Galip Cansever
 Ders #-3 Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performasını tahmin etmek ister.
Ders #-3 Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performasını tahmin etmek ister.
Sistem Dinamiği. Bölüm 6. Elektrik ve Elektromekanik Sistemler. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER
 TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
SAYISAL KONTROL 2 PROJESİ
 SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir.
 ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
Matlab & Simulink MATLAB SIMULINK
 Matlab & Simulink MATLAB SIMULINK Simulink Oturumunu Başlatma SIMULINK icon üzerine tıkla Veya Matlab komut satırında simulink Yaz Simulink Kütüphanesi Yeni model iconu oluşturma Arama penceresi Model
Matlab & Simulink MATLAB SIMULINK Simulink Oturumunu Başlatma SIMULINK icon üzerine tıkla Veya Matlab komut satırında simulink Yaz Simulink Kütüphanesi Yeni model iconu oluşturma Arama penceresi Model
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri)
") KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
T.C. MARMARA ÜNĠVERSĠTESĠ TEKNĠK EĞĠTĠM FAKÜLTESĠ ELEKTRONĠK-BĠLGĠSAYAR EĞĠTĠMĠ BÖLÜMÜ VE ELEKTRĠK EĞĠTĠMĠ BÖLÜMÜ
 T.C. MARMARA ÜNĠVERSĠTESĠ TEKNĠK EĞĠTĠM FAKÜLTESĠ ELEKTRONĠK-BĠLGĠSAYAR EĞĠTĠMĠ BÖLÜMÜ VE ELEKTRĠK EĞĠTĠMĠ BÖLÜMÜ OTOMATĠK KONTROL DERSĠ LABORATUAR DENEYLERĠ DENEY ALIġTIRMA SORULARI (v.1010031044.otokontrol.foy.sorular)
T.C. MARMARA ÜNĠVERSĠTESĠ TEKNĠK EĞĠTĠM FAKÜLTESĠ ELEKTRONĠK-BĠLGĠSAYAR EĞĠTĠMĠ BÖLÜMÜ VE ELEKTRĠK EĞĠTĠMĠ BÖLÜMÜ OTOMATĠK KONTROL DERSĠ LABORATUAR DENEYLERĠ DENEY ALIġTIRMA SORULARI (v.1010031044.otokontrol.foy.sorular)
ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU
 T.C. MARMARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU Mehmet SUCU (Teknik Öğretmen, BSc.)
T.C. MARMARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU Mehmet SUCU (Teknik Öğretmen, BSc.)
KISIM 1 ELEKTRONİK DEVRELER (ANALİZ TASARIM - PROBLEM)
") İÇİNDEKİLER KISIM 1 ELEKTRONİK DEVRELER (ANALİZ TASARIM - PROBLEM) 1. BÖLÜM GERİBESLEMELİ AMPLİFİKATÖRLER... 3 1.1. Giriş...3 1.2. Geribeselemeli Devrenin Transfer Fonksiyonu...4 1.3. Gerilim - Seri Geribeslemesi...5
İÇİNDEKİLER KISIM 1 ELEKTRONİK DEVRELER (ANALİZ TASARIM - PROBLEM) 1. BÖLÜM GERİBESLEMELİ AMPLİFİKATÖRLER... 3 1.1. Giriş...3 1.2. Geribeselemeli Devrenin Transfer Fonksiyonu...4 1.3. Gerilim - Seri Geribeslemesi...5
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
Analog Alçak Geçiren Filtre Karakteristikleri
 Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Çukurova Üniversitesi Biyomedikal Mühendisliği
 Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuarı Deney Föyü Deney#6 İşlemsel Kuvvetlendiriciler (OP-AMP) - 2 Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY
Çukurova Üniversitesi Biyomedikal Mühendisliği BMM309 Elektronik-2 Laboratuarı Deney Föyü Deney#6 İşlemsel Kuvvetlendiriciler (OP-AMP) - 2 Doç. Dr. Mutlu AVCI Arş. Gör. Mustafa İSTANBULLU ADANA, 2015 DENEY
DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP
 DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP Amaç: Bu deneyin amacı, öğrencilerin alternatif akım ve gerilim hakkında bilgi edinmesini sağlamaktır. Deney sonunda öğrencilerin, periyot, frekans, genlik,
DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP Amaç: Bu deneyin amacı, öğrencilerin alternatif akım ve gerilim hakkında bilgi edinmesini sağlamaktır. Deney sonunda öğrencilerin, periyot, frekans, genlik,
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ
 DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
Açık Çevrim Kontrol Açık Çevrim Kontrol
 Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
İletişim Ağları Communication Networks
 İletişim Ağları Communication Networks Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, Behrouz A. Forouzan, Data Communications and Networking 4/E, McGraw-Hill,
İletişim Ağları Communication Networks Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, Behrouz A. Forouzan, Data Communications and Networking 4/E, McGraw-Hill,
SERVOMOTOR HIZ VE POZİSYON KONTROLÜ
 SERVOMOTOR HIZ VE POZİSYON KONTROLÜ Deneye Hazırlık: Deneye gelmeden önce DC servo motor çalışması ve kontrolü ile ilgili bilgi toplayınız. 1.1.Giriş 1. KAPALI ÇEVRİM HIZ KONTROLÜ DC motorlar çok fazla
SERVOMOTOR HIZ VE POZİSYON KONTROLÜ Deneye Hazırlık: Deneye gelmeden önce DC servo motor çalışması ve kontrolü ile ilgili bilgi toplayınız. 1.1.Giriş 1. KAPALI ÇEVRİM HIZ KONTROLÜ DC motorlar çok fazla
DENEY 1 Laplace Dönüşümü
 DENEY 1 Laplace Dönüşümü DENEYİN AMACI 1. Laplace dönüşümü uygulamaını anlamak.. Simulink yardımıyla Laplace dönüşüm çiftlerinin benzetimini yapmak. 3. ACS-1000 Analog Kontrol Sitemini kullanarak, Laplace
DENEY 1 Laplace Dönüşümü DENEYİN AMACI 1. Laplace dönüşümü uygulamaını anlamak.. Simulink yardımıyla Laplace dönüşüm çiftlerinin benzetimini yapmak. 3. ACS-1000 Analog Kontrol Sitemini kullanarak, Laplace
ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER
 ADC ve DAC 1 BM-201 2 ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER Maksimum ve minimum sınırları arasında farklı değerler alarak değişken elektriksel büyüklüklere analog bilgi ya da analog değer denir. Akım ve gerilim
ADC ve DAC 1 BM-201 2 ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER Maksimum ve minimum sınırları arasında farklı değerler alarak değişken elektriksel büyüklüklere analog bilgi ya da analog değer denir. Akım ve gerilim
T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK LABORATUVARI-II DENEY RAPORU AKTİF FİLTRELER
 T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK LABORATUVARI-II Öğrenci No: Adı Soyadı: Grubu: DENEY RAPORU AKTİF FİLTRELER Deneyin Yapıldığı Tarih:.../.../2017
T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK LABORATUVARI-II Öğrenci No: Adı Soyadı: Grubu: DENEY RAPORU AKTİF FİLTRELER Deneyin Yapıldığı Tarih:.../.../2017
Sensörlerin ölçümlerinde bir miktar hata payı olması. Ölçümlere gürültü karışması.
 Contents Kalman filtresi uygulamaları Kalman filtresinin temelleri DC motor modeli üzerinde Kalman filtresi Kalman filtresi için tümleşik sistem oluşturma Kalman filtresi için parametre seçimi Kalman filtresini
Contents Kalman filtresi uygulamaları Kalman filtresinin temelleri DC motor modeli üzerinde Kalman filtresi Kalman filtresi için tümleşik sistem oluşturma Kalman filtresi için parametre seçimi Kalman filtresini
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
Kontrol Sistemlerinin Tasarımı
 Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım IV Geribesleme Üzerinden Denetim ve Fiziksel Gerçekleme Prof.Dr.Galip Cansever 2 3 Denetleyiciyi veya dengeleyiciyi geribesleme hattı üzerine
Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım IV Geribesleme Üzerinden Denetim ve Fiziksel Gerçekleme Prof.Dr.Galip Cansever 2 3 Denetleyiciyi veya dengeleyiciyi geribesleme hattı üzerine
= 2 6 Türevsel denkleminin 1) denge değerlerinin bulunuz. 2) Bulmuş olduğunuz dengenin istikrarlı olup olmadığını tespit ediniz.
 denge değerlerinin bulunuz. 2) Bulmuş olduğunuz dengenin istikrarlı olup olmadığını tespit ediniz.") Siyasal Bilgiler Fakültesi İktisat Bölümü Matematiksel İktisat Ders Notu Prof. Dr. Hasan Şahin Faz Diyagramı Çizimi Açıklamarı = 2 6 Türevsel denkleminin 1) denge değerlerinin bulunuz. 2) Bulmuş olduğunuz
Siyasal Bilgiler Fakültesi İktisat Bölümü Matematiksel İktisat Ders Notu Prof. Dr. Hasan Şahin Faz Diyagramı Çizimi Açıklamarı = 2 6 Türevsel denkleminin 1) denge değerlerinin bulunuz. 2) Bulmuş olduğunuz