T.C. KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ. Quadruped Robot. Hazırlayan Engin Aydın
|
|
|
- Ayla Hamzaoğlu
- 4 yıl önce
- İzleme sayısı:
Transkript

1 T.C. KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Quadruped Robot Hazırlayan Engin Aydın Tez Danışmanı Doç.Dr. İbrahim ÇAYIROĞLU
2
3 ÖNSÖZ Öncelikle proje ve tez konusunda yardımlarını esirgemeyen danışmanım sayın Doç. Dr. İbrahim ÇAYIROĞLU başta olmak üzerine lisans eğitimim boyunca üzerimde emeği olan tüm öğretim üyelerine ve eğitim hayatım boyunca yanımda olan, desteklerini her daim hissettiğim aileme sonsuz teşekkürlerimi sunarım. Engin AYDIN
4 İçindekiler ÖZET KULLANILAN MALZEMELER Arduino Mikrodenetleyici Arduino UNO R3 ün Teknik Özellikleri Güç Hafıza Giriş ve Çıkış Haberleşme Programlama USB Aşırı Akım Koruması Tower Pro MG996 Servo Motorun Teknik Özellikleri Servo Motorların Çalışma Prensibi Bluetooth Modülü Teknik Özellikler Güç Kaynağı Teknik Özellikleri ÇALIŞMA PRENSİBİ Bir Adımlık İleri Hareket TASARIM Parçaların Bilgisayar Ortamında Tasarımı Bacak Boyutları Gövde Boyutları D Yazıcı ile Üretilen Parçalar Devre Tasarımı BLUETOOTH İLE KONTROL İleri Hareket Geri Hareket Sağa Hareket Sola Hareket Test Dur Sağa Kırk Beş Derece Dönüş Hareketi
5 4.8. Sol Kırk Beş Derece Dönüş Hareketi Sağa On Beş Derece Dönüş Hareketi Sola On Beş Derece Dönüş Hareketi KOD Arduino ile Programlama Kodlar KAYNAKÇA ÖZGEÇMİŞ
6 Şekiller Listesi [1] 1.1 Arduino Uno R [2] 1.2. Servo motor (MG996) [3] 1.3 Bluetooth modülü (HC-06) [4] 2.1. Başlangıç açı değerleri [5] 2.2. Bacak 1 e ait uç motorun hareketinin başlangıcı [6] 2.3. Bacak 1 e ait dip motorun hareketi [7] 2.4. Bacak 1 e ait uç motorun hareketinin bitişi [8] 2.5. Bacak 2 e ait uç motorun hareketinin başlangıcı [9] 2.6. Bacak 2 e ait dip motorun hareketi [10] 2.7. Bacak 2 e ait uç motorun hareketinin bitişi [11] 2.8. Bacak 3 e ait uç motorun hareketinin başlangıcı [12] 2.9. Bacak 3 e ait dip motorun hareketi [13] Bacak 3 e ait uç motorun hareketinin bitişi [14] Bacak 4 e ait uç motorun hareketinin başlangıcı [15] Bacak 4 e ait dip motorun hareketi [16] Bacak 4 e ait uç motorun hareketinin bitişi [17] Dip motorların kendini itmesi [18] 3.1. Parçaların montajlanmış hali [19] 3.2. Bacak boyutları (1) [20] 3.3. Bacak boyutları (2) [21] 3.4. Gövde tabanı [22] 3.5. Gövde kasası [23] 3.6. Parçaların montajlanmış hali (3D) [24] 3.7. Gövde tabanı (3D) [25] 3.8. Bacak (3D) [26] 3.9. Devre tasarımı [ 27] 4.1. Kumanda ekranı [28] 4.2. Kumanda atamaları [29] 4.3. İleri hareket (i) [30] 4.4. Geri hareket (g) [31] 4.5. Sağa hareket (r) [32] 4.6. Sola hareket (l) [33] 4.7. Test (t) [34] 4.8. Dur (d) [35] ] 4.9. Sağa kırk beş derece dönme hareketi (+) [36] Sola kırk beş derece dönme hareketi (-) [37] Sağa on beş derece dönme hareketi (x) [38] Sola on beş derece dönme hareketi (y)
7 Simge Listesi V: Volt ma: Miliamper KB: Kilobayt MHz: mm: Milimetre g: Gram kgf cm: dbm: Desibel (db), sinyal gücünün miktarı. (Desibel x miliwatt) MBps: Saniye başına megabit KBps: Saniye başına kilobit - 4 -
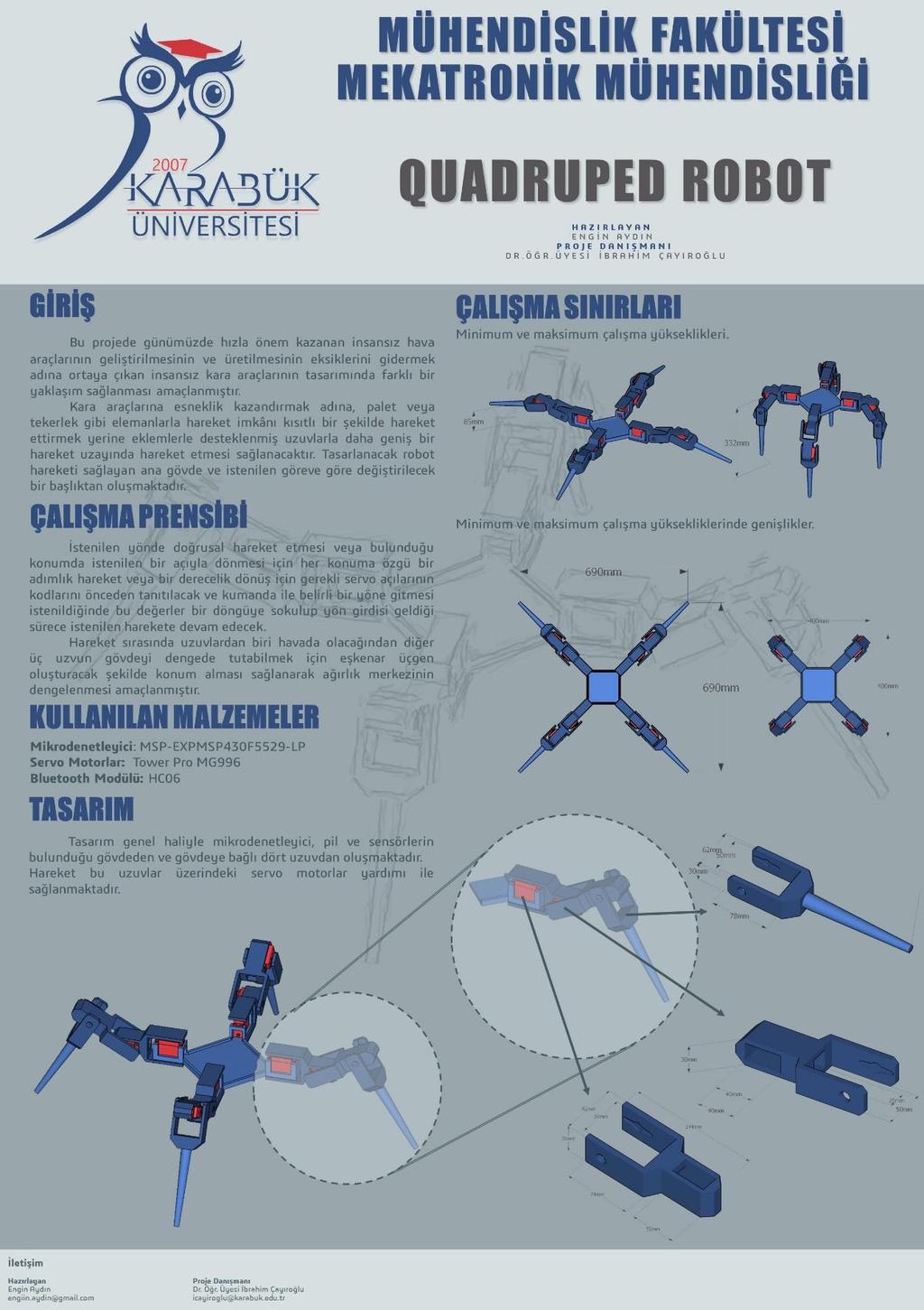
8 ÖZET Bu projede günümüzde hızla önem kazanan insansız hava araçlarının geliştirilmesinin ve üretilmesinin eksiklerini gidermek adına ortaya çıkan insansız kara araçlarının tasarımında farklı bir yaklaşım sağlanması amaçlanmıştır. Kara araçlarına esneklik kazandırmak adına palet veya tekerlek gibi elemanlarla hareket imkânı kısıtlı bir şekilde hareket ettirmek yerine eklemlerle desteklenmiş uzuvlarla daha geniş bir hareket uzayında hareket etmesi sağlanacaktır. Tasarlanacak robot hareketi sağlayan ana gövde ve istenilen göreve göre değiştirilecek bir başlıktan oluşmaktadır

9 1. KULLANILAN MALZEMELER Robotun hareketli mekanizmasını oluşturan gövdenin alt kısmının değiştirilmesi gövdenin üst kısmının değiştirilmesine oranla daha kısıtlı olacağından bu bölgedeki araçlar standartlaştırılmıştır. Hareketli kısımlar için servo motorlar yeterli olurken gövde kısmında yapılacak özelleştirmeler ile birden fazla sensör veyaa seri haberleşme elamanı bulunabilir Arduino Mikrodenetleyici [1] 1.1 Arduino Uno R3-6 -
10 Bu projede Arduino Uno R3 klonu kullanılmıştır. R3 klonu üzerlerinde kullanılan elektronik devre elemanları ve tüm işlevselliği orijinal kart ile aynıdır. Ancak orjinal üründe DIP kılıfında bulunan yonga, bu üründe ise SMD kılıfında yer alır. Projede kapsamında Arduino ile HC-06 bluetooth modülü kullanılarak servo motorların kontrolü sağlanmıştır. Servo motorların kontrolü için 4,5,8,9,10,11,12,13 numaralı pinler ve bluetooth modülünün kontrolü için 6 ve 7 numaralı pinler kullanılmıştır. Kartı beslemek için ise 5V ve 2,1 A çıkış değerlerine sahip bir powerbank kullanılmıştır Arduino UNO R3 ün Teknik Özellikleri Mikrodenetleyici: ATmega328 Çalışma Gerilimi: 5V Giriş Gerilimi (önerilen): 7-12V Giriş Gerilimi (limit): 6-20V Dijital G/Ç Pinleri: 14 (6 tanesi PWM çıkışı) Analog Giriş Pinleri: 6 Her G/Ç için Akım: 40 ma 3.3V Çıkış için Akım: 50 ma Flash Hafıza: 32 KB (ATmega328) 0.5 KB kadarı bootloader SRAM: 2 KB (ATmega328) EEPROM: 1 KB (ATmega328) - 7 -
11 Saat Hızı: 16 MHz Uzunluk: 68.6 mm Genişlik: 53.4 mm Ağırlık: 25 g Güç Arduino UNO gücünü USB üzerinden veya harici güç kaynağından alabilir. Harici güç kaynağı AC-DC adaptör olabileceği gibi batarya da olabilir. Adaptör kart üzerindeki 2.1mm merkez-pozitif güç soketinden veya GND (-) ve Vin (+) pinleri üzerinden bağlanabilir. Kartın çalışması için sürekli olarak USB'nin bağlı olması şart değildir. Kart sadece adaptör veya batarya ile çalıştırılabilir. Bu sayede kart bilgisayardan bağımsız olarak çalıştırılabilir. Harici güç kaynağı olarak 6-20V arası kullanılabilir. Ancak bu değerler limit değerleridir. Kart için önerilen harici besleme gerilimi 7-12V arasıdır. Çünkü kart üzerinde bulunan regülatör 7V altındaki değerlerde stabil çalışmayıp 12V üstündeki değerlerde de aşırı ısınabilir. UNO kartının üzerindeki mikrodenetleyicinin çalışma gerilimi 5V'dur. Vin pini veya güç soketi üzerinden verilen 7-12V arası gerilim kart üzerinde bulunan voltaj regülatörü ile 5V'a düşürülerek karta dağılır. Vin: Harici güç kaynağı kullanılırken 7-12V arası gerilim giriş pini. 5V: Bu pin regülatörden çıkan 5V çıkışı verir. Eğer kart sadece USB (5V) üzerinden çalışıyor ise, USB üzerinden gelen 5V doğrudan bu pin üzerinden çıkış olarak verilir
12 Eğer karta güç Vin (7-12V) veya güç soketi (7-12V) üzerinden veriliyorsa regülatörden çıkan 5V doğrudan bu pin üzerinden çıkış olarak verilir. 3V3: Kart üzerinde bulunan 3.3V regülatörü çıkış pinidir. Maks. 50mA çıkış verebilir. GND: Toprak pinleridir Hafıza Atmega328P mikrokontrolcüsü 32 KB'lık flash belleğe sahiptir (0.5 KB kadarı bootloader tarafından kullanılmaktadır). 2 KB SRAM ve 1 KB EEPROM'u bulunmaktadır Giriş ve Çıkış UNO üzerindeki 14 adet dijital pinin hepsi giriş veya çıkış olarak kullanılabilir. 6 tane analog giriş pini de bulunmaktadır. Bu analog giriş pinleride aynı şekilde dijital giriş ve çıkış olarak kullanılabilir. Yani kart üzerinde toplam 20 tane dijital giriş çıkış pini vardır. Bu pinlerin tamamının lojik seviyesi 5V'dur. Her pin maks. 40mA giriş ve çıkış akımı ile çalışır. Ek olarak, bazı pinlerin farklı özellikleri bulunmaktadır. Özel pinler aşağıda belirtildiği gibidir: Seri Haberleşme, 0 (RX) ve 1 (TX): TTL Seri veri alıp (RX), vermek (TX) için kullanılır. Bu pinler doğrudan kart üzerinde bulunan Atmega16u2 USB-seri dönüştürücüsüne bağlıdır. Yani bilgisayardan karta program yüklenirken veya bilgisayar-uno arasında karşılıklı haberleşme yapılırken de bu pinler kullanılır. O yüzden karta program yüklerken veya haberleşme yapılırken hata olmaması için mecbur kalınmadıkça bu pinlerin kullanılmamasında fayda vardır
13 Harici Kesme, 2 (interrupt 0) ve 3 (interrupt 1): Bu pinler yükselen kenar, düşen kenar veya değişiklik kesmesi pinleri olarak kullanılabilir. PWM, 3,5,6,9,10 ve 11: 8-bit çözünürülükte PWM çıkış pinleri olarak kullanılabilir. SPI, 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK): Bu pinler SPI haberleşmesi için kullanılır. LED, 13: UNO üzerinde 13. pine bağlı olan, kart üzerinde "L" harfi ile belirtilmiş dahili bir LED bulunmaktadır. Pin HIGH yapıldığında LED yanacak, LOW yapıldığında LED sönecektir. Analog, A0-A5: UNO, 6 adet 10-bit çözünürlüğünde analog giriş pinine sahiptir. Bu pinler dijital giriş ve çıkış için de kullanılabilir. Pinlerin ölçüm aralığı 0-5V'tur. AREF pini veanalogreference() foksiyonu kullanılarak alt limit yükseltilip, üst limit düşürülebilir. I2C, A4 veya SDA pini ve A5 veya SCL pini: Bu pinler I2C haberleşmesi için kullanılır. AREF: Analog girişler için ölçüm referansı pini. Reset: Mikrodenetleyici resetlenmek istendiğinde bu pin LOW yapılır. Reset işlemi kart üzerinde bulunan reset butonu ile de yapılabilir
14 Haberleşme Arduino UNO'nun bilgisayarla, başka bir Arduino veya mikrodenetleyici ile haberleşmesi için bir kaç farklı seçenek vardır. Atmega328, 0 (RX) ve 1 (TX) pinleri üzerinden UART TTL (5V) seri haberleşme imkanı sunar. Kart üzerinde bulunan Atmega16u2 USB-seri dönüştürücü de bilgisayarda sanal bir seri port (COM portu) açarak Atmega328 ile bilgisayar arasında bir köprü kurar. Arduino IDE içerisinde yer alan seri monitör ile Arduino ile bilgisayar arasında metin temelli bilgilerin gönderilip alınmasını sağlar. USB-seri dönüştürücü ile bilgisayar arasında USB üzerinden haberleşme olduğu zaman kart üzerinde bulunan RX ve TX LED'leri yanacaktır. UNO üzerinde donanımsal olarak bir adet seri port bulunmaktadır. Ancak Software- Serial kütüphanesi ile bu sayı yazılımsal olarak arttırılabilir. Atmega328 aynı şekilde I2C ve SPI portlarıda sağlamaktadır. Arduino IDE içerisinde yer alan Wire kütüphanesi I2C kullanımını, SPI kütüphanesi de SPI haberleşmesini sağlamak için kullanılır Programlama Arduino UNO kartı Arduino bilgisayar programı (Arduino IDE) ile programlanır. Program içerisinde Tools > Board sekmesi altında Arduino UNO'yu seçip programlamaya başlayabilirsiniz. Ayrıntılı bilgi için referans ve temel fonksiyonlar sayfasını inceleyebilirsiniz. Arduino UNO üzerindeki Atmega328 üzerine bootloader isimli özel bir yazılım yüklü gelir. Bu sayede kartı programlarken ekstra bir programlayıcı kullanmanıza gerek kalmaz. Haberleşme STK500 protokolü ile sağlanır. Bootloader yazılımı bypass edilerek kart doğrudan mikrodenetleyicinin ICSP header kullanılarak ISP programlayıcı ile programlanabilir (referans)
15 Bootloader yazılımı gibi Atmega16u2 içerisindeki kaynak yazılım da açık kaynaklıdır. Bu yazılıma da DFU bootloader adı verilir. Atmel's FLIP software (Windows) veya DFU programmer (Mac OS X ve Linux) kullanılarak bu yazılım yeniden yüklenebilir. Veya Atmega328'de olduğu gibi 16u2'de ISP programlayıcı ile programlanabilir. Gerek Atmega328 gerekse 16u2 içerisindeki yazılımlar her zaman en güncel hali ile gönderilir. O yüzden mecbur kalmadıkça bu yazılımları değiştirmenize gerek yoktur USB Aşırı Akım Koruması Arduino UNO üzerinden bulunan resetlenebilir sigorta, bilgisayarınızın USB portunu kısa devrelerden veya aşırı akım tüketimi durumlarından korumaktadır. Kart, USB portu üzerinden 500mA'den fazla akım çektiğinde otomatik olarak USB'den aldığı gücü koruma amacıyla kesmektedir. Fazla akım durumu veya kısa devre ortadan kaldırıldığında sigorta normal konuma döner ve tekrar bağlantı kurulur
![1.2. Servo Motor [2] 1.2. Servo motor (MG996) Robotun hareketini sağlamak amacıyla projede servo motorlar kullanılmıştır. Projede kullanılan servo motorlar Tower Pro markasının MG996 modelidir. 1.2.1. Tower Pro MG996 Servo Motorun Teknik Özellikleri Büyüklük: 40.](/docs-images/101/151214884/images/16-0.jpg "6 x 19.8 x 36.5mm, Ağırlık: 50 gr, Hız @4.8V: 0.15sn/60, Zorlanma Torku @4.8V: 9,4 kgf cm, Zorlanma Torku @6V: 13 kgf cm, - 13 -")
16 1.2. Servo Motor [2] 1.2. Servo motor (MG996) Robotun hareketini sağlamak amacıyla projede servo motorlar kullanılmıştır. Projede kullanılan servo motorlar Tower Pro markasının MG996 modelidir Tower Pro MG996 Servo Motorun Teknik Özellikleri Büyüklük: 40.6 x 19.8 x 36.5mm, Ağırlık: 50 gr, 0.15sn/60, Zorlanma 9,4 kgf cm, Zorlanma 13 kgf cm,
17 Ölü bant genişliği: 5 μs, Çalışma Akımı: 500mA - 900mA (6V) Durma Akımı: 2.5 A (6V), Çalışma Gerilimi: 4.8V ~ 7.2V, Servo Motorların Çalışma Prensibi Servo motorların içerisinde motorun hareketini sağlayan bir DC motor bulunmaktadır. Bu motorun dışında bir dişli mekanizması, potansiyometre ve bir motor sürücü devresi bulunmaktadır. Potansiyometre, motor milinin dönüş miktarını ölçmektedir. Servo içerisindeki DC motor hareket ettikçe potansiyometre döner ve kontrol devresi motorun bulunduğu pozisyon ile istenilen pozisyonu karşılaştırarak motor sürme işlemi yapar. Yani, servolar diğer motorlar gibi harici bir motor sürücüye ihtiyaç duymadan çalışmaktadırlar. Genellikle çalışma açıları 180 derece ile sınırlıdır fakat 360 derece çalışma açısına sahip özel amaçlı servo motorlar da vardır. Servolar genellikle 4.8-6V gerilim ile çalışmaktadırlar. 7.4V ve daha yüksek gerilimle çalışan servolar da bulunmaktadır. Servo motorlar PWM (Sinyal Genişlik Modülasyonu) sinyal ile çalışmaktadırlar. Bu PWM sinyaller bir mikrokontrolcüden veya uzaktan kumandadan sağlanabilmektedir. Servo, her 20 ms içerisinde bir pals değeri okumaktadır. Pals uzunluğu motorun dönüşünü belirlemektedir. Servolar hareket etmeleri için bir komut aldıklarında önce istenilen pozisyona hareket ederler, sonrasında ise o pozisyonda kalırlar. Servolar bulundukları pozisyonu korurken kendilerine dışarıdan bir güç uygulandığında bu güce direnirler. Bulundukları konumu sonsuza kadar koruyamazlar, pozisyonlarını koruyabilmeleri için palsin tekrar edilmesi gerekebilir. Hareket etmeleri için gereken pals genişliklerinin minimumları ve maksimumları vardır ve bu değerler değişkendir. Fakat genellikle minimum pals genişliği 1 ms, maksimum pals genişliği ise 2 ms dir
![1.3. Bluetooth Modülü [3] 1.3 Bluetooth modülü (HC-06) Robotun kontrolünü sağlamak için bluetooth modül kullanılmıştır.](/docs-images/101/151214884/images/18-0.jpg "Android cihaz ile iletişim halinde olup, gelen veri ile istenilen komutun algılanması ve buna göre istenilen eylemin gerçekleştirilmesi amaçlanmıştır.")
18 1.3. Bluetooth Modülü [3] 1.3 Bluetooth modülü (HC-06) Robotun kontrolünü sağlamak için bluetooth modül kullanılmıştır. Android cihaz ile iletişim halinde olup, gelen veri ile istenilen komutun algılanması ve buna göre istenilen eylemin gerçekleştirilmesi amaçlanmıştır. HC-06 Bluetooth-Serial Modül Kartı, Bluetooth SSP(Serial Port Standart) kullanımı ve kablosuz seri haberleşme uygulamaları için tasarlanmıştırçoğu bluetooth modülden farklı olarak master modunu da desteklemektedir. Bluetooth 2.0'ı destekleyen bu kart, 2.4GHz frekansında haberleşme yapılmasına imkan sağlayıp açık alanda yaklaşık 10 metrelik bir haberleşme mesafesine sahiptir
19 Teknik Özellikler Bluetooth Protokolü: Bluetooth 2.0+EDR(Gelişmiş Veri Hızı)2.4GHz haberleşme frekansı Hassasiyet: -80 dbm Çıkış Gücü: +4 dbm Asenkron Hız: 2.1 MBps/160 KBps Senkron Hız: 1 MBps/1 MBps Güvenlik: Kimlik Doğrulama ve Şifreleme Çalışma Gerilimi: V(Önerilen 3.3V) kım: 50 ma Boyutları: 43x16x7mm 1.4. Güç Kaynağı Sensörler için gerekli enerji mikrodenetleyici üzerindeki pinlerden sağlanabiliyorken robot üzerindeki motor sayısını fazla olmasından dolayı kart üzerinden gelen enerji motorlar için yetersiz kalacaktır. Mikro denetleyiciyi ve motorları aynı anda beslemek için iki çıkışlı bir powerbank kullanılmıştır Teknik Özellikleri Kapasite: 4000mAh Giriş değerleri: 5V 1,5 A Çıkış değerleri: 5V 2,1 A
20 2. ÇALIŞMA PRENSİBİ Robotun temel olarak çalışma mantığı önceden belirlenen, hareketlere özgü açı değişimlerinin kumandadan gelen bilgi doğrultusunda devreye sokulmasıdır. Bu başlık altında bu açı değişimlerine örnekler verilecek kod başlığı altında değinilen bilgilerin görselleştirilmesi sağlanacaktır. Öncelikle hareketin sağlanmasında temel şartlardan biri robotun dengede kalmasıdır. Bu yüzden robotun hareketi sırasında bacaklarından biri havada olacağından diğer üç bacağın oluşturacağı yeni pozisyonun ağırlık merkezi gövdenin ağırlık merkezi üzerinde veya merkezine yakın olmalıdır. Bu denge şartı sağlandıktan sonra robot belirli eylemlere uygun daha önce tanımlanmış açı değerlerini istenilen süre ile devreye sokar. Üst paragrafta bahsedilen hareketlere özgü açı değişimleri şu şekilde gerçekleşir: Robot ilk bacağını kaldırarak ileri hareket ettirir daha sonra bu hareketi diğer üç bacak tekrar eder. Böylece tüm bacaklar bir adım önde olacaktır. Fakat bu durumda gövde pozisyonu geride kalacağından adımlar tamamlandıktan sonra gövdenin kendini ileri itmesi istenir. Bu hareket dizini tamamlandığında robot bir adım ilerlemiş olacaktır. Bluetooth ile Kontrol başlığı altında belirtilen kumandaya tanımlı değerlerden ileri hareketin bir adımlık döngüsü alt başlık altında sunulmuştur

![2 4 3 [4] 2.1.](/docs-images/101/151214884/images/21-1.jpg "Başlangıç açı değerleri Bacak 1 e ait uç servo ileri atılacağından 45")
21 2.1. Bir Adımlık İleri Hareket Robotun harekete başlamadan önceki açı değerleri [4] 2.1. Başlangıç açı değerleri Bacak 1 e ait uç servo ileri atılacağından 45 derece havaya kalkarak bacağın ileri gitmesine olanak tanır [5] 2.2. Bacak 1 e ait uç motorun hareketinin başlangıcı
22 Bacak 1 ait dip servo 45 derece dönere Bacak 1 i son pozisyona getirir [6] 2.3. Bacak 1 e ait dip motorun hareketi Bundan sonraki aşamalarda Bacak 1 i ilgilendirecek bir hareket olmadığı için Bacak 1 ait uç servo 45 derece dönerek zemine değer [7] 2.4. Bacak 1 e ait uç motorun hareketinin bitişi

23 Bundan sonraki aşamalarda diğer üç bacakta aynı hareketi yapacağından diğer bacaklara ilişkin açıklamalar eklenmemiştir [8] 2.5. Bacak 2 e ait uç motorun hareketinin başlangıcı [9] 2.6. Bacak 2 e ait dip motorun hareketi
24 [10] 2.7. Bacak 2 e ait uç motorun hareketinin bitişi [11] 2.8. Bacak 3 e ait uç motorun hareketinin başlangıcı
![2 1 4 3 [12] 2.9.](/docs-images/101/151214884/images/25-0.jpg "Bacak 3 e ait dip motorun")
![hareketi 1 2 3 4 [13] 2.10.](/docs-images/101/151214884/images/25-1.jpg "Bacak 3 e ait uç motorun")
25 [12] 2.9. Bacak 3 e ait dip motorun hareketi [13] Bacak 3 e ait uç motorun hareketinin bitişi
![2 1 4 3 [14] 2.11.](/docs-images/101/151214884/images/26-0.jpg "Bacak 4 e ait uç motorun hareketinin başlangıcı [15] 2.12.")
26 [14] Bacak 4 e ait uç motorun hareketinin başlangıcı [15] Bacak 4 e ait dip motorun hareketi
![[16] 2.13.](/docs-images/101/151214884/images/27-0.jpg "Bacak 4 e ait uç motorun hareketinin bitişi Tüm bacaklar istenilen konuma geldikten sonra gövde geride kalacağından gövdeyi")
27 [16] Bacak 4 e ait uç motorun hareketinin bitişi Tüm bacaklar istenilen konuma geldikten sonra gövde geride kalacağından gövdeyi ileri itmek için dip motorlar yardımıyla son bir hareket yapılır. [17] Dip motorların kendini itmesi


28 3. TASARIM Robotun fiziksel yapısı hareketli alt gövde ve farklı amaçlar için tasarlanmış modüler üst gövdelerden oluşmakta. Alt kısım üst gövde yapılacak değişiklerden bağımsız ve sadece hareket odaklıdır. Üst kısım ise mikrodenetleyici, sensörler ve seri haberleşme modülleri gibi bileşenleri yer aldığı bir yapıdan oluşmaktadır. Bu iki kısmı oluşturan parçalar alt başlıklarda detaylandırılmıştır. Bunlara ek olarak motor gibi bileşenler ile mikrodenetleyici arasındaki bağlantılarda bu başlık altında ele alınmıştır Parçaların Bilgisayar Ortamında Tasarımı Parçaların bilgisayar ortamında tasarımında SketchUp programı kullanılmıştır. Aşağıdaki şekillerde gövde uzuvlarının ayrıntıları verilmiştir. Gövde Servo motorlar [18] 3.1. Parçaların montajlanmış hali

 [20] 3.3. Bacak boyutları (2) - 26 -")
29 Bacak Boyutları Bacaklar iki parçadan oluşur ilk parçanın başlangıcında gövdedeki servo motorun yerleşeceği yuva ve uç kısmında bir sonraki parçayı kontrol etmek için yerleştirilecek servonun yuvası yer alır. Servo motor yuvası [19] 3.2. Bacak boyutları (1) [20] 3.3. Bacak boyutları (2)



30 Gövde Boyutları Gövde taban ve bu tabana yerleştirilen bir kasadan oluşmakta. Gövde tabanının köşelerine bacakların kontrolü için servo motorlar yerleştirilmiştir. Tabanın üzerine kasa yerleştirilmesinin amacı robot kontrolü için kullanılan mikrodenetleyici, bluetooth gibi elamanları çevre etkilerinden korunması ve oluşacak kablo ağını bir araya getirilmesidir. [21] 3.4. Gövde tabanı [22] 3.5. Gövde kasası


31 3.2. 3D Yazıcı ile Üretilen Parçalar Bir önceki başlık altına belirtilen bilgisayar ortamında çizilen parçalar 3D yazıcıda %50 doluluk oranı ile ABS filamentle basılmıştır. Bu başlık altında basılan parçalara ait görsellere yer verilmiştir. [23] 3.6. Parçaların montajlanmış hali (3D)
![[24] 3.7.](/docs-images/101/151214884/images/32-0.jpg "Gövde")
 [25]")


32 [24] 3.7. Gövde tabanı (3D) [25] 3.8. Bacak (3D)
33 3. 3. Devre Tasarımı Daha önceki başlıklarda bahsedildiği gibi robotta hareket servo motorlar yardımıyla sağlanmıştır ve servo motorların kontrolü ise Arduino R3 kullanarak gerçekleştirilmiştir. Robotun yapımında sekiz adet servo motor kullanılmıştır. Servo motorların çektiği akım servo başlığında da belirtildiği gibi minimum 500 ma dir. Arduino çıkışından alınacak maksimumu gerilim 50 ma olduğu için kart üzerinden doğrudan motorları beslemek mümkün olmayacaktır. Bu yüzden sisteme motorları sürmek için ekstra bir güç kaynağı bağlanması gerekmektedir. Şekilde göründüğü üzere harici güç kaynağından motorlar beslenmiş ve harici güç kaynağının GND çıkış ile kart üzerindeki GND çıkışı aynı hatta bağlanmıştır. Servo motorların sinyal kabloları kart üzerindeki 4, 5, 8, 9, 10,11, 12, 13 portlarına bağlanarak servo motorların kontrolü sağlanmıştır. Devrede kullandığımız bir diğer eleman olan bluetooth modülünü kontrol etmek için öncelikler 6. Ve 7. pinlerine yazılım yardımıyla RX ve TX atamaları yapılmış ve modül üzerindeki RX ve TX portlarına bağlanmıştır. Bu bağlantının RX TX ve TX RX şeklinde olmasına dikkat edilmelidir
 Bluetooth (HC-06) [26] 3.9.")
34 Harici Güç Kaynağı Servo Motorlar Mikrodenetleyici (Arduino UNO R3) Bluetooth (HC-06) [26] 3.9. Devre tasarımı

35 4. BLUETOOTH İLE KONTROL Telefon ve Arduino Uno R3 mikrodenetleyicinin arasında iletişimi sağlamak için HC-06 bluetooth modülü kullanılmıştır. Mikrodenetleyicinin 6. ve 7. pinleri kart ile modül arasında seri haberleşmeyi sağlamak için kullanılmıştır. Robotu kumanda etmek için ise android işletim sistemine sahip bir akıllı telefon seçilmiştir. Bu proje üzerinde kullanılan uygulama Google Play üzerinden temin edilen Arduino Bluetooth Controller isimli uygulamadır. Uygulama üzerindeki butonlara harf atamaları yapılarak istenilen eylem gerçekleştirmek istendiğinde bu butonlar basılması ile gerçekleşmesi sağlanmıştır. Sistem şu şekilde çalışır: Uygulama üzerinde bir butona basıldığı zaman buton üzerine kayıtlı olan harf bluetooth ile HC-06 modülüne gönderilir daha sonra modül ile mikrodenetleyici arasındaki seri haberleşme sayesinde buton değerinin devreye sokacağı kod döngesi karta bildirilmiş olur. [ 27] 4.1. Kumanda ekranı
![[28] 4.2. Kumanda atamaları Üstte bahsedilen çalışma mantığına örnek olarak aşağıdaki ifadeler verilebilir. Kumandadan alınan değer data isimli değişkene atanmıştır.](/docs-images/101/151214884/images/36-0.jpg "Bu değişken if komutu ile sorgulanarak eğer data değişkeni sorguda istenen değere uyuyorsa döngü içerisine alınmıştır.")
36 [28] 4.2. Kumanda atamaları Üstte bahsedilen çalışma mantığına örnek olarak aşağıdaki ifadeler verilebilir. Kumandadan alınan değer data isimli değişkene atanmıştır. Bu değişken if komutu ile sorgulanarak eğer data değişkeni sorguda istenen değere uyuyorsa döngü içerisine alınmıştır. Kumanda atamalarında belirtilen tuşların görevlerine alt başlıklarda değinilmiştir. Alt başlıklarda yer alan hareket kodları tanımlamasının ayrıntıları kod başlığı altında verilmiştir


37 4.1. İleri Hareket Robotun doğrusal olarak hareket etmesini sağlar. [29] 4.3. İleri hareket (i) if (data_received == 'i') { //**********İLERİ HAREKET KODLARI**********// } 4.2. Geri Hareket Robotun gövdesi pozisyon değiştirmeden geriye hareketi sağlar. [30] 4.4. Geri hareket (g)
38 if (data_received == 'g') { //**********GERİ HAREKET KODLARI**********// } 4.3. Sağa Hareket Robotun gövdesi pozisyon değiştirmeden geriye hareketi sağlar. [31] 4.5. Sağa hareket (r) if (data_received == 'r') { //**********SAĞA HAREKET KODLARI**********// }
39 4.4. Sola Hareket Robotun gövdesi pozisyon değiştirmeden geriye hareketi sağlar. [32] 4.6. Sola hareket (l) if (data_received == 'l') { //**********SOLA HAREKET KODLARI**********// } 4.5. Test Test girdisi geldiğinde robot üzerindeki iletişimin sağlanıp sağlanmadığı, servo motorlara elektrik gelip gelmediği gibi durumları kontrol etmek için robota bir dizi hareket yaptırır
![[33] 4.7. Test (t) if (data_received == 't') { //**********TEST HAREKETİ KODLARI**********// } 4.6.](/docs-images/101/151214884/images/40-0.jpg "Dur Servo değerleri robotun dengede olduğu açı durumlarına gelerek robotu hareketsiz bırakır. [34] 4.8.")
40 [33] 4.7. Test (t) if (data_received == 't') { //**********TEST HAREKETİ KODLARI**********// } 4.6. Dur Servo değerleri robotun dengede olduğu açı durumlarına gelerek robotu hareketsiz bırakır. [34] 4.8. Dur (d)
![if (data_received == 'd') { //**********DUR HAREKETİ KODLARI**********// } 4.7. Sağa Kırk Beş Derece Dönüş Hareketi [35] ] 4.9.](/docs-images/101/151214884/images/41-0.jpg "Sağa kırk beş derece dönme hareketi (+) if (data_received == '+') { //*****SAĞA KIRK BEŞ DERECE DÖNME HAREKETİ KODLARI*****// } -")
41 if (data_received == 'd') { //**********DUR HAREKETİ KODLARI**********// } 4.7. Sağa Kırk Beş Derece Dönüş Hareketi [35] ] 4.9. Sağa kırk beş derece dönme hareketi (+) if (data_received == '+') { //*****SAĞA KIRK BEŞ DERECE DÖNME HAREKETİ KODLARI*****// }
![4.8. Sol Kırk Beş Derece Dönüş Hareketi [36] 4.10.](/docs-images/101/151214884/images/42-0.jpg "Sola kırk beş derece dönme hareketi (-) if (data_received == '-') { } //*****SOLA KIRK BEŞ DERECE DÖNME HAREKETİ KODLARI*****// 4.9. Sağa On Beş Derece Dönüş Hareketi [37] 4.11.")
42 4.8. Sol Kırk Beş Derece Dönüş Hareketi [36] Sola kırk beş derece dönme hareketi (-) if (data_received == '-') { } //*****SOLA KIRK BEŞ DERECE DÖNME HAREKETİ KODLARI*****// 4.9. Sağa On Beş Derece Dönüş Hareketi [37] Sağa on beş derece dönme hareketi (x) if (data_received == 'x') { } //*****SAĞA ON BEŞ DERECE DÖNME HAREKETİ KODLARI*****//
![4.10. Sola On Beş Derece Dönüş Hareketi [38] 4.12.](/docs-images/101/151214884/images/43-0.jpg "Sola on beş derece dönme hareketi (y) if (data_received == 'y') { //*****SOLA ON BEŞ")
43 4.10. Sola On Beş Derece Dönüş Hareketi [38] Sola on beş derece dönme hareketi (y) if (data_received == 'y') { //*****SOLA ON BEŞ DERECE DÖNME HAREKETİ KODLARI*****// }
44 4. KOD Robotun fiziksel yapısında olduğu gibi yazılımında da gövdenin altını ve üstünü çalıştıracak kodlar ayrı ayrı değerlendirilir. Robotu hareket ettiren alt kısmını çalıştıracak kodların yazılmasında tek bir amaç güdüldüğü için bu kodlar robotun üst kısmındaki herhangi bir değişiklikten etkilenmeden her farklı gövde üstü eklentisi için aynı şekilde olacaktır. Robotun hareketli kısmına ait kodlar yazılırken dikkat edilmesi gereken en önemli faktör robotun ağırlık merkezinin bacaklarla olan ilişkisidir. Hareket boyunca robotun dört ayağından üçü mutlaka zemine değiyor olmalıdır aksi taktirde robot dengesini sağlayamayacağı için hareket edemeyecektir. Yere basan ayakların durumu da büyük önem taşımaktadır çünkü eklemlerin oluşturacağı üçgenin ağırlık merkezi ile robotun ağırlık merkezi ne kadar birbirine yakın olursa robot o kadar dengeli olur. Hareket kodları yazılırken robotun karşılaşa bileceği durumlarda göz önüne alınmalıdır. Sadece ileri giden bir robot proje için istenilenden uzak bir hedeftir. Aşağıdaki kodun içerisinde de belirtildiği gibi robota; ileri, geri, pozisyonunu koruyarak sağa yönelme, pozisyonunu koruyarak sola yönelme, kendi etrafında sola ve sağa dönme gibi hareket kodları tanıtılmış. Kodlar Arduino ile yazılmıştır Arduino ile Programlama Arduino bir G/Ç kartı ve Processing/Wiring dilinin bir uygulamasını içeren geliştirme ortamından oluşan bir fiziksel programlama platformudur. Arduino kartlarının donanımında bir adet Atmel AVR mikrodenetleyici (ATmega328, ATmega2560, ATmega32u4 gibi) ve programlama ve diğer devrelere bağlantı için gerekli yan elemanlar bulunur. Her Arduino kartında en azından bir 5 voltluk regüle entegresi ve bir 16MHz kristal osilator (bazılarında seramik rezonatör) vardır. Arduino
45 kartlarında programlama için harici bir programlayıcıya ihtiyaç duyulmaz, çünkü karttaki mikrodenetleyiciye önceden bir bootloader programı yazılıdır. Arduino geliştirme ortamı (IDE), Arduino bootloader (Optiboot), Arduino kütüphaneleri, AVRDude (Arduino üzerindeki mikrodenetleyici programlayan yazılım) ve derleyiciden (AVR-GCC) oluşur. Arduino yazılımı bir geliştirme ortamı (IDE) ve kütüphanelerden oluşur. IDE, Java dilinde yazılmıştır ve Processing adlı dilin ortamına dayanmaktadır. Kütüphaneler ise C ve C++ dillerinde yazılmıştır ve AVR-GCC ve AVR Libc. ile derlenmiştir. Arduino kaynak kodlarına buradan ulaşabilirsiniz. Optiboot bileşeni Arduino 'nun bootloader bileşenidir. Bu bileşen, Arduino kartlarının üzerindeki mikrodenetleyicinin programlanmasını sağlayan bileşendir. Arduino 'nun bu kadar çok tercih edilmesini sağlayan en önemli bileşen ise mikrodenetleyici konusunda detaylı bilgi sahibi olmayı gerektirmeden herkesin programlama yapabilmesini sağlayan Arduino kütüphaneleridir. AVRDude bileşeni ise derlenen kodları programlamak için kullanılır Kodlar //*****Servo kütüphanesi ve seri iletişim kütüphanelerinin eklenmesi *****// #include <Servo.h> #include <SoftwareSerial.h> //**********Servoların tanıtılması**********//
46 SoftwareSerial bluetooth(7, 6); Servo motor1; Servo motor2; Servo motor3; Servo motor4; Servo motor5; Servo motor6; Servo motor7; Servo motor8; void setup() { //**********MOTOR PİN ATAMALARI**********// //***Yeşil(Bacak Bir)***// motor1.attach(12); motor2.attach(13);
47 //***Sarı(Bacak İki)***// motor3.attach(8); motor4.attach(9); //***Mor(Bacak Üç)***// motor5.attach(10); motor6.attach(11); //***Lacivert(Bacak Dört)***// motor7.attach(4); motor8.attach(5 ); //**********Başlangıç değerleri**********// motor1.write(85); motor2.write(150); motor3.write(85); motor4.write(10); motor5.write(80);
48 motor6.write(145); motor7.write(70); motor8.write(20); Serial.begin(9600); bluetooth.begin(9600); } void loop() { if (bluetooth.available()) { char data_received; data_received = bluetooth.read(); if (data_received == 'i') { //**********İLERİ**********// //***Bacak Üç***//
49 motor6.write(145); motor5.write(75); motor6.write(85); motor5.write(120); motor6.write(145); delay(500); //***Bacak Bir***// motor2.write(150); motor1.write(43); motor2.write(90); motor1.write(85); motor2.write(150); delay(500);
50 //***Bacak Dört***// motor8.write(20); motor7.write(75); motor8.write(80); motor7.write(35); motor8.write(20); delay(500); //***Bacak İki***// motor4.write(10); motor3.write(125); motor4.write(85); motor3.write(80); motor4.write(10);
51 delay(500); //***itme***// motor1.write(43); motor3.write(125); motor5.write(80); motor7.write(70); delay(500); } if (data_received == 'g' ) { //**********GERİ**********// //***Bacak İki***// motor4.write(10); motor3.write(80); motor4.write(85);
52 motor3.write(125); motor4.write(10); delay(500); //***Bacak Dört***// motor8.write(20); motor7.write(35); motor8.write(80); motor7.write(75); motor8.write(20); delay(500); //***Bacak Bir***// motor2.write(150); motor1.write(85);
53 motor2.write(90); motor1.write(43); motor2.write(150); delay(500); //***Bacak Üç***// motor6.write(145); motor5.write(120); motor6.write(85); motor5.write(75); motor6.write(145); delay(500); //***itme***// motor1.write(85);
54 motor3.write(80); motor5.write(120); motor7.write(35); delay(500); } if (data_received == 'r') { //**********SAĞ**********// //***Bacak Dört***// motor8.write(20); motor7.write(75); motor8.write(80); motor7.write(120); motor8.write(20); delay(500);
55 //***Bacak Üç***// motor6.write(145); motor5.write(30); motor6.write(85); motor5.write(75); motor6.write(145); delay(500); //***Bacak İki***// motor4.write(10); motor3.write(80); motor4.write(85); motor3.write(45);
56 motor4.write(10); delay(500); //***Bacak Bir***// motor2.write(150); motor1.write(120); motor2.write(90); motor1.write(85); motor2.write(150); delay(500); //***itme***// motor1.write(130); motor3.write(75); motor5.write(30); motor7.write(75); delay(500);
57 } if (data_received == 'l') { //**********SOL**********// //***Bacak Bir***// motor2.write(150); motor1.write(85); motor2.write(90); motor1.write(120); motor2.write(150); delay(500); //***Bacak İki***//
58 motor4.write(10); motor3.write(45); motor4.write(85); motor3.write(80); motor4.write(10); delay(500); //***Bacak Üç***// motor6.write(145); motor5.write(75); motor6.write(85); motor5.write(30); motor6.write(145); delay(500);
59 //***Bacak Dört***// motor8.write(20); motor7.write(120); motor8.write(80); motor7.write(75); motor8.write(20); delay(500); //***itme***// motor1.write(85); motor3.write(45); motor5.write(75); motor7.write(120); delay(500); } if (data_received == 'd')
60 { //**********DUR**********// //***Bacak Bir***// motor1.write(90); motor2.write(150); //***Bacak İki***// motor3.write(90); motor4.write(10); //***Bacak Üç***// motor5.write(80); motor6.write(145);
61 //***Bacak Dört***// motor7.write(70); motor8.write(20); } if (data_received == 't') { motor1.write(90); motor3.write(90); motor5.write(80); motor7.write(70); motor2.write(150); delay(250);
62 motor2.write(90); delay(250); motor2.write(150); delay(250); motor4.write(10); delay(250); motor4.write(70); delay(250); motor4.write(10); delay(250); motor5.write(80); delay(250); motor6.write(145); delay(250); motor6.write(95); delay(250); motor6.write(145); delay(250); motor8.write(20); delay(250); motor8.write(80);
63 delay(250); motor8.write(20); delay(250); } if (data_received == '+') { //**********KIRK BEŞ DERECE SAĞA DÖN**********// //***Bacak Bir***// motor2.write(150); motor1.write(90); motor2.write(90); motor1.write(45); motor2.write(150);
64 //***Bacak Üç***// motor6.write(145); motor5.write(80); motor6.write(85); motor5.write(35); motor6.write(145); //***Bacak Dört***// motor8.write(20); motor7.write(70); motor8.write(80); motor7.write(35); motor8.write(20);
65 //***Bacak İki***// motor4.write(15); motor3.write(90); motor4.write(65); motor3.write(45); motor4.write(15); //***Son Dönme***// motor1.write(90); delay(100); motor3.write(90); delay(100); motor5.write(80); delay(100); motor7.write(70);
66 delay(100); } if (data_received == 'x') { //**********ON BEŞ DERECE SAĞA DÖN**********// //***Bacak Bir***// motor2.write(150); motor1.write(90); motor2.write(90); motor1.write(75); motor2.write(150); delay(500); //***Bacak Üç***//
67 motor6.write(145); motor5.write(80); motor6.write(85); motor5.write(65); motor6.write(145); delay(500); //***Bacak Dört***// motor8.write(20); motor7.write(70); motor8.write(80); motor7.write(55); motor8.write(20); delay(500);
68 //***Bacak İki***// motor4.write(15); motor3.write(90); motor4.write(65); motor3.write(75); motor4.write(15); delay(500); //***Son Dönme***// motor1.write(90); delay(100); motor3.write(90); delay(100); motor5.write(80); delay(100); motor7.write(70); delay(100);
69 } if (data_received == '-') { //**********KIRK BEŞ DERECE SOLA DÖN**********// //***Bacak Bir***// motor2.write(150); motor1.write(85); motor2.write(90); motor1.write(125); motor2.write(150); delay(500); //***Bacak İki***// motor4.write(15);
70 motor3.write(85); motor4.write(65); motor3.write(125); motor4.write(15); delay(500); //***Bacak Dört***// motor8.write(20); motor7.write(70); motor8.write(80); motor7.write(115); motor8.write(20); delay(500); //***Bacak Üç***//
71 motor6.write(145); motor5.write(80); motor6.write(85); motor5.write(120); motor6.write(145); delay(500); //***Son Dönme***// motor1.write(90); delay(100); motor3.write(90); delay(100); motor5.write(80); delay(100); motor7.write(70); delay(500); } if (data_received == 'y') {
72 //**********ON BEŞ DERECE SOLA DÖN**********// //***Bacak Bir***// motor2.write(150); motor1.write(85); motor2.write(90); motor1.write(100); motor2.write(150); delay(500); //***Bacak İki***// motor4.write(15); motor3.write(85); motor4.write(65);
73 motor3.write(100); motor4.write(15); delay(500); //***Bacak Dört***// motor8.write(20); motor7.write(70); motor8.write(80); motor7.write(85); motor8.write(20); delay(500); //***Bacak Üç***// motor6.write(145); motor5.write(80);
74 motor6.write(85); motor5.write(95); motor6.write(145); delay(500); //***Son Dönme***// motor1.write(90); delay(100); motor3.write(90); delay(100); motor5.write(80); delay(100); motor7.write(70); delay(500); } } }
75 5. KAYNAKÇA 1. (How to Program a Quadruped Robot with Arduino, 2016) [ 2. (Arduino Quadruped Robot, 2016) [ 3. (ARDUINO QUADRUPED ROBOT STALKER, 2013) [ 4. (ESP8266 WIFI AP Controlled Quadruped Robot, 2018) [ 5. (Servo Motor Nedir? Çeşitleri ve Çalışma Prensibi, 2015) [ 6. (Arduino UNO R3, 2018) [ 7. (MG996R Digital Servo, 2013) [ 8. (Bluetooth ile İletişim, 2016) [
76 6. ÖZGEÇMİŞ Engin AYDIN 1996 yılında Bursa da doğdu; ilk ve orta öğretimini doğduğu şehirde Nezir Gencer İlköğretim okulunda tamamladı; Şehit Onbaşı Hakan Yutkun Anadolu Lisesini tamamladıktan sonra 2015 Karabük Üniversitesi, Mühendislik Fakültesi, Mekatronik Mühendisliği Bölümü'ne girdi. Halen bu bölümde eğitimini sürdürmektedir. İletişim Bilgileri E-posta: Tel:
77 - 74 -
PROJE RAPORU. Proje adı: Pedalmatik 1 Giriş 2 Yöntem 3 Bulgular 6 Sonuç ve tartışma 7 Öneriler 7 Kaynakça 7
 PROJE RAPORU Proje Adı: Pedalmatik Projemizle manuel vitesli araçlarda gaz, fren ve debriyaj pedallarını kullanması mümkün olmayan engelli bireylerin bu pedalları yönetme kolu (joystick) ile sol el işaret
PROJE RAPORU Proje Adı: Pedalmatik Projemizle manuel vitesli araçlarda gaz, fren ve debriyaj pedallarını kullanması mümkün olmayan engelli bireylerin bu pedalları yönetme kolu (joystick) ile sol el işaret
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
DOKUMANLAR
 DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK PROJE UYGULAMASI
 KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK PROJE UYGULAMASI Proje Sorumlusu : Eren YAMAÇ Proje Sorumlusu Öğ.No. : 2015010226021 Proje Danışmanı : Prof. Dr. Ahmet DEMİR Proje Adı: Android Kontrollü
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK PROJE UYGULAMASI Proje Sorumlusu : Eren YAMAÇ Proje Sorumlusu Öğ.No. : 2015010226021 Proje Danışmanı : Prof. Dr. Ahmet DEMİR Proje Adı: Android Kontrollü
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
IR Modülü. Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm
 ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ TUŞ TAKIMI KONTROLLÜ LCD EKRANLI KAPI KİLİDİ DİLA ZEREN YILMAZ BiLGiSAYAR MÜHENDİSLİĞİ BÖLÜMÜ 2013-2014 BAHAR YARIYILI KARADENİZ TEKNİK
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ TUŞ TAKIMI KONTROLLÜ LCD EKRANLI KAPI KİLİDİ DİLA ZEREN YILMAZ BiLGiSAYAR MÜHENDİSLİĞİ BÖLÜMÜ 2013-2014 BAHAR YARIYILI KARADENİZ TEKNİK
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI PİC PROGRAMLAMA İLE BASİT UÇAK OYUNU MEHMET HALİT İNAN BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BAHAR 2014 KARADENİZ TEKNİK ÜNİVERSİTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI PİC PROGRAMLAMA İLE BASİT UÇAK OYUNU MEHMET HALİT İNAN BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BAHAR 2014 KARADENİZ TEKNİK ÜNİVERSİTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ MİKRODENETLEYİCİ ile DXBALL OYUN TASARIMI DİLARA AKYÜZ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANA BİLİMDALI BAHAR 2014 KARADENİZ TEKNİK ÜNİVERSİTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ MİKRODENETLEYİCİ ile DXBALL OYUN TASARIMI DİLARA AKYÜZ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANA BİLİMDALI BAHAR 2014 KARADENİZ TEKNİK ÜNİVERSİTESİ
ALİ ÇETİNKAYA Tuğba SARAY DERS DANIŞMANI PROF. DR. MEHMET BAYRAK
 T.C. KTO KARATAY ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK VE BİLGİSAYAR MÜHENDİSLİĞİ ANA BİLİM DALI ULTRASONİK SENSÖR İLE RADAR OLUŞTURMA VE BLUETOOTH SENSÖR ÜZERİNDEN GELEN VERİLERE GÖRE ROBOT HAREKETLERİNİN
T.C. KTO KARATAY ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK VE BİLGİSAYAR MÜHENDİSLİĞİ ANA BİLİM DALI ULTRASONİK SENSÖR İLE RADAR OLUŞTURMA VE BLUETOOTH SENSÖR ÜZERİNDEN GELEN VERİLERE GÖRE ROBOT HAREKETLERİNİN
Melih Hilmi ULUDAĞ. Yazılım Mühendisi Mekatronik Mühendisi. a aittir.
 Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
BESLEME KARTI RF ALICI KARTI
 BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
void setup() fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.
 fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.") ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
BİLGİSAYAR BİLİMİ DERSİ (KUR-2)
") BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
K.K.T.C YAKIN DOĞU ÜNİVERSİTESİ BİYOMEDİKAL MÜHENDİSLİĞİ EMG TABANLI 3 BOYUTLU PROTEZ EL UYGULAMASI. Mezuniyet Projesi BERKAY FAHİR BAYRAKÇEKEN
 K.K.T.C YAKIN DOĞU ÜNİVERSİTESİ BİYOMEDİKAL MÜHENDİSLİĞİ EMG TABANLI 3 BOYUTLU PROTEZ EL UYGULAMASI Mezuniyet Projesi BERKAY FAHİR BAYRAKÇEKEN ALİ OSMAN KIRKYAŞAROĞLU SİNAN BULUT Lefkoşa, 2016 K.K.T.C
K.K.T.C YAKIN DOĞU ÜNİVERSİTESİ BİYOMEDİKAL MÜHENDİSLİĞİ EMG TABANLI 3 BOYUTLU PROTEZ EL UYGULAMASI Mezuniyet Projesi BERKAY FAHİR BAYRAKÇEKEN ALİ OSMAN KIRKYAŞAROĞLU SİNAN BULUT Lefkoşa, 2016 K.K.T.C
Elif İLİKSİZ. Keziban TURAN. Radio Frekanslarla Hareket Eden Araç
 Elif İLİKSİZ Keziban TURAN Radio Frekanslarla Hareket Eden Araç Mayıs 2016 İÇİNDEKİLER ALICI ALICI MEKANİZMASI VERİCİ MEKANİZMASI MALZEMELER MEKANİK KISIM ELEKTRONİK KISIM YAZILIM Robotumuzun adı: Radio
Elif İLİKSİZ Keziban TURAN Radio Frekanslarla Hareket Eden Araç Mayıs 2016 İÇİNDEKİLER ALICI ALICI MEKANİZMASI VERİCİ MEKANİZMASI MALZEMELER MEKANİK KISIM ELEKTRONİK KISIM YAZILIM Robotumuzun adı: Radio
Arduino Temel Bilgiler
 Bu e-kitap Arduino ile proje geliştirmek isteyenler için temel bilgiler içermektedir. Arduino Temel Bilgiler Şevket Yılmaz Yazılım Mühendisi sevket-yilmaz@windowslive.com ARDUİNO NEDİR? Arduino bir mikro
Bu e-kitap Arduino ile proje geliştirmek isteyenler için temel bilgiler içermektedir. Arduino Temel Bilgiler Şevket Yılmaz Yazılım Mühendisi sevket-yilmaz@windowslive.com ARDUİNO NEDİR? Arduino bir mikro
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ İKİLİ KRONOMETRE MİNE MÜNEVVER EYMİR 229042 DANIŞMAN: PROF. DR. VASİF V. NABİYEV BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI TRABZON,
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ İKİLİ KRONOMETRE MİNE MÜNEVVER EYMİR 229042 DANIŞMAN: PROF. DR. VASİF V. NABİYEV BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI TRABZON,
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ AKILLI FAN KONTROLÜ TASARIM PROJESİ Eren GÜMÜŞ 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ AKILLI FAN KONTROLÜ TASARIM PROJESİ Eren GÜMÜŞ 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
KULLANIM KILAVUZU PIC ULAK. USB PIC Programlayıcı 3.3V ve 5V Güç Kaynağ Seri USB Dönüştürücü Bağlantı Portları
 ADPUSB PC7 PC6 USB PIC Programlayıcı 3.3V ve 5V Güç Kaynağ Seri USB Dönüştürücü Bağlantı Portları LAB.CO katronik JCU VCC Seçim Özelliği Özelliği Dahili 18F2550 PIC ikrodenetleyici KULLANI KILAVUZU PIC
ADPUSB PC7 PC6 USB PIC Programlayıcı 3.3V ve 5V Güç Kaynağ Seri USB Dönüştürücü Bağlantı Portları LAB.CO katronik JCU VCC Seçim Özelliği Özelliği Dahili 18F2550 PIC ikrodenetleyici KULLANI KILAVUZU PIC
ARDUINO NEXTION UYGULAMASI. Bu makale, Arduino UNO kartı ile Nextion HMI ekranlarının nasıl kontrol edildiğini anlatmaktadır.
 1 Bu makale, Arduino UNO kartı ile Nextion HMI ekranlarının nasıl kontrol edildiğini anlatmaktadır. Uygulama, Arduino UNO kartına bir analog giriş olarak uygulanan potansiyometredeki değişimi Nextion HMI
1 Bu makale, Arduino UNO kartı ile Nextion HMI ekranlarının nasıl kontrol edildiğini anlatmaktadır. Uygulama, Arduino UNO kartına bir analog giriş olarak uygulanan potansiyometredeki değişimi Nextion HMI
Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r.
 Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r. Özellikleri 5 dk gibi bir sürede kurulumu yapılabilir. Açık kaynaklı bir pla orm olan Arduino temeline
Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r. Özellikleri 5 dk gibi bir sürede kurulumu yapılabilir. Açık kaynaklı bir pla orm olan Arduino temeline
Örnek. int analogpin = 3; int val = 0; void setup() { Serial.begin(9600); } void loop() { val = analogread(analogpin); Serial.
 { Serial.begin(9600); } void loop() { val = analogread(analogpin); Serial.") Seri Port Ekranı Arduinoyu USB üzerinden bilgisayarımıza bağladığımızda aslında seri port bağlantısı yapmış oluyoruz. Bu seri port üzerinden hem bilgi alışverişi yapabilir hem de uç bağlantı noktasındaki,
Seri Port Ekranı Arduinoyu USB üzerinden bilgisayarımıza bağladığımızda aslında seri port bağlantısı yapmış oluyoruz. Bu seri port üzerinden hem bilgi alışverişi yapabilir hem de uç bağlantı noktasındaki,
Adres Yolu (Address Bus) Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması
 Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması") MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
Terminal Üzerinden Led Kontrol Uygulaması
 Genel Bakış Bluetooth Shield üzerinde HC-05 bluetooth modülü bulunan bir arduino shield didir.bu shield ile arduino kartınıza android telefonunuzdan, bilgisayarınızdan veya başka bir arduino dan bluetooth
Genel Bakış Bluetooth Shield üzerinde HC-05 bluetooth modülü bulunan bir arduino shield didir.bu shield ile arduino kartınıza android telefonunuzdan, bilgisayarınızdan veya başka bir arduino dan bluetooth
İletişim Protokolleri (Communication Protocols)
") İletişim Protokolleri (Communication Protocols) Arduino dış dünya ile iletişim kurabilmek için genel amaçlı i/o pinleri önceki konu başlığında incelenmişti. LED, buton, role vb. cihazlardan girdi almak
İletişim Protokolleri (Communication Protocols) Arduino dış dünya ile iletişim kurabilmek için genel amaçlı i/o pinleri önceki konu başlığında incelenmişti. LED, buton, role vb. cihazlardan girdi almak
DY-45 OSĐLOSKOP KĐTĐ. Kullanma Kılavuzu
 DY-45 OSĐLOSKOP KĐTĐ Kullanma Kılavuzu 01 Kasım 2010 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir yazılım
DY-45 OSĐLOSKOP KĐTĐ Kullanma Kılavuzu 01 Kasım 2010 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir yazılım
web-sitesi : satış : teknik destek : tel : IM-SMO20 Ultrasonik Mesafe Sensörü Özellikler
 web-sitesi : www.inovasyonmuhendislik.com www.evarobot.com satış : satis@inovasyonmuhendislik.com teknik destek : destek@inovasyonmuhendislik.com tel : +90 222 2290710 IM-SMO20 ultrasonik mesafe sensörü
web-sitesi : www.inovasyonmuhendislik.com www.evarobot.com satış : satis@inovasyonmuhendislik.com teknik destek : destek@inovasyonmuhendislik.com tel : +90 222 2290710 IM-SMO20 ultrasonik mesafe sensörü
Doç. Dr. Cüneyt BAYILMIŞ
 BSM 460 KABLOSUZ ALGILAYICI AĞLAR Doç. Dr. Cüneyt BAYILMIŞ Nesnelerin İnterneti 1 BSM 460 KABLOSUZ ALGILAYICI AĞLAR 5. Hafta KABLOSUZ ALGILAYICI AĞLAR Nesnelerin İnterneti 2 Kablosuz Algılayıcı Ağlar (Wireless
BSM 460 KABLOSUZ ALGILAYICI AĞLAR Doç. Dr. Cüneyt BAYILMIŞ Nesnelerin İnterneti 1 BSM 460 KABLOSUZ ALGILAYICI AĞLAR 5. Hafta KABLOSUZ ALGILAYICI AĞLAR Nesnelerin İnterneti 2 Kablosuz Algılayıcı Ağlar (Wireless
EEM 419-Mikroişlemciler Güz 2017
 EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RENK OKUYUCU ROBOT BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RENK OKUYUCU ROBOT BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI HALİL İBRAHİM UZUN AYBİKE ÖZBEK AYAN BAHAR 2015 KARADENİZ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RENK OKUYUCU ROBOT BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI HALİL İBRAHİM UZUN AYBİKE ÖZBEK AYAN BAHAR 2015 KARADENİZ
TEKNİK ÖZELLİKLER. Giriş Beslemesi. Giriş besleme voltajı. Motor Çıkışı. Motor gerilimi. Aşırı yük ve kısa devre korumalı.
 1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI WİRELESS LI GAMEPAD İLE ARAÇ KONTROLÜ GAMZE GEDİKLİ AHMET TEMÜR
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI WİRELESS LI GAMEPAD İLE ARAÇ KONTROLÜ GAMZE GEDİKLİ AHMET TEMÜR BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANA BİLİM DALI 2013 / 2014 ÖNSÖZ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI WİRELESS LI GAMEPAD İLE ARAÇ KONTROLÜ GAMZE GEDİKLİ AHMET TEMÜR BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANA BİLİM DALI 2013 / 2014 ÖNSÖZ
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek
 Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
İÇİNDEKİLER VII İÇİNDEKİLER 1 ARDUINONUN TEMELLERİ 1
 İÇİNDEKİLER VII İÇİNDEKİLER 1 ARDUINONUN TEMELLERİ 1 Mikrodenetleyiciler ve Arduino 2 Mikrodenetleyiciler 2 Atmel AVR Mikrodenetleyicileri 3 Avr ve RISC Mimarisi 4 Neden Arduino? 5 Arduino Geliştirme Ortamı
İÇİNDEKİLER VII İÇİNDEKİLER 1 ARDUINONUN TEMELLERİ 1 Mikrodenetleyiciler ve Arduino 2 Mikrodenetleyiciler 2 Atmel AVR Mikrodenetleyicileri 3 Avr ve RISC Mimarisi 4 Neden Arduino? 5 Arduino Geliştirme Ortamı
Yedi Karat Kullanım Klavuzu. Yedi Karat nedir? Neden Karat?
 Yedi Karat Kullanım Klavuzu Yedi Karat nedir? Karat, fiziksel dünya ile iletişim ve etkileşim kurulabilmesini sağlayan, elektronik prototip geliştirme kartıdır. Karat, tek başına çalışabilen interaktif
Yedi Karat Kullanım Klavuzu Yedi Karat nedir? Karat, fiziksel dünya ile iletişim ve etkileşim kurulabilmesini sağlayan, elektronik prototip geliştirme kartıdır. Karat, tek başına çalışabilen interaktif
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ PROJENİN ADI HACI YATMAZ TASARIM PROJESİ Adı SOYADI Hünkar PURTUL İbrahim AKKAŞOĞLU 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ PROJENİN ADI HACI YATMAZ TASARIM PROJESİ Adı SOYADI Hünkar PURTUL İbrahim AKKAŞOĞLU 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK
 https://www.facebook.com/groups/alisrobotics/ https://www.instagram.com/alikesfet/ Bline Kutu İçeriği 2x Redüktörlü DC Motor 2x Tekerlek 1x Akıllı Araç Şasesi 1x Arduino Uno 1x USB Kablosu 1x Alis Robotics
https://www.facebook.com/groups/alisrobotics/ https://www.instagram.com/alikesfet/ Bline Kutu İçeriği 2x Redüktörlü DC Motor 2x Tekerlek 1x Akıllı Araç Şasesi 1x Arduino Uno 1x USB Kablosu 1x Alis Robotics
DY-45 OSİLOSKOP V2.0 KİTİ
 DY-45 OSİLOSKOP V2.0 KİTİ Kullanma Kılavuzu 12 Ocak 2012 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir
DY-45 OSİLOSKOP V2.0 KİTİ Kullanma Kılavuzu 12 Ocak 2012 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir
Bilgisayar ile Dijital Devrelerin Haberleşmesi. FT232R ve MAX232 Entegreleri. Çalışma Raporu
 Bilgisayar ile Dijital Devrelerin Haberleşmesi FT232R ve MAX232 Entegreleri Çalışma Raporu Hazırlayan: Fatih Erdem 26 Mayıs 2011 Bilgisayar ile Dijital Devrelerin Haberleşmesi Günümüz bilgisayarları USB,
Bilgisayar ile Dijital Devrelerin Haberleşmesi FT232R ve MAX232 Entegreleri Çalışma Raporu Hazırlayan: Fatih Erdem 26 Mayıs 2011 Bilgisayar ile Dijital Devrelerin Haberleşmesi Günümüz bilgisayarları USB,
CPU ONE PLC KULLANMA KLAVUZU
 CPU ONE PLC KULLANMA KLAVUZU A. GENEL ÖZELLİKLER CPU One endüstrinin zorlu şartları göz önüne alınarak, otomasyon ihtiyaçlarına uygun olarak tasarlanan yerli üretim programlanabilir kontrol cihazıdır.
CPU ONE PLC KULLANMA KLAVUZU A. GENEL ÖZELLİKLER CPU One endüstrinin zorlu şartları göz önüne alınarak, otomasyon ihtiyaçlarına uygun olarak tasarlanan yerli üretim programlanabilir kontrol cihazıdır.
ATBRFN. Radyo Frekansı (RF) Tabanlı Dorse Takip Birimi. Bilgi Dokümanı (ATBRFN) www.dtsis.com 1
 Tabanlı Dorse Takip Birimi. Bilgi Dokümanı (ATBRFN) www.dtsis.com 1") Radyo Frekansı (RF) Tabanlı Dorse Takip Birimi (ATBRFN) Bilgi Dokümanı www.dtsis.com 1 İçindekiler 1. Genel Tanım... 3 2. Sistem Tanımı... 4 2.1. Master Cihaz... 4 2.1.1. Blok Diyagram... 4 2.1.2. Teknik
Radyo Frekansı (RF) Tabanlı Dorse Takip Birimi (ATBRFN) Bilgi Dokümanı www.dtsis.com 1 İçindekiler 1. Genel Tanım... 3 2. Sistem Tanımı... 4 2.1. Master Cihaz... 4 2.1.1. Blok Diyagram... 4 2.1.2. Teknik
robotsan idea Kontrol Kartı (idea Board) Kurulum
 Kurulum") robotsan idea Kontrol Kartı (idea Board) 1 Genel Bakış Bu dokümanda, robotsan tarafından geliştirilmiş olan idea Kontrol Kartları nın programlanabilmesi için işletim sistemine tanıtılması sırasında yapılması
robotsan idea Kontrol Kartı (idea Board) 1 Genel Bakış Bu dokümanda, robotsan tarafından geliştirilmiş olan idea Kontrol Kartları nın programlanabilmesi için işletim sistemine tanıtılması sırasında yapılması
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
Endüstri 4.0 ve Nesnelerin Interneti
 Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0, teknolojilerin ve değer zinciri organizasyonları kavramlarının kolektif bir bütünüdür. (http://www.endustri40.com/endustri-tarihine-kisa-bir-yolculuk)
Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0, teknolojilerin ve değer zinciri organizasyonları kavramlarının kolektif bir bütünüdür. (http://www.endustri40.com/endustri-tarihine-kisa-bir-yolculuk)
İçindekiler FPGA GELİŞTİRME KARTI ENERJİ BESLEMESİ:... 5 ENERJİ SİSTEMİ ŞEMASI:... 5 FPGA GELİŞTİRME KARTINA PROGRAM YÜKLEME:... 6
 Hazırlayan: Erkan ÇİL 2016 2 FPGA Geliştirme Kartı Kullanıcı Kılavuzu İçindekiler FPGA Geliştirme Kartı Bilgileri FPGA Geliştirme Kartının Kullanımı FPGA GELİŞTİRME KARTI ENERJİ BESLEMESİ:... 5 ENERJİ
Hazırlayan: Erkan ÇİL 2016 2 FPGA Geliştirme Kartı Kullanıcı Kılavuzu İçindekiler FPGA Geliştirme Kartı Bilgileri FPGA Geliştirme Kartının Kullanımı FPGA GELİŞTİRME KARTI ENERJİ BESLEMESİ:... 5 ENERJİ
Strike 5.50 R Proximity Kart Okuyucu Kullanım Kılavuzu
 Strike 5.50 R Proximity Kart Okuyucu Kullanım Kılavuzu Bu kılavuz Strike 5,50 R kullanım ve bilgisayar bağlantısı ile cihaz tanımlamalarına yönelik doğru çalışma alışkanlıkları konusunda bilgiler vermektedir.
Strike 5.50 R Proximity Kart Okuyucu Kullanım Kılavuzu Bu kılavuz Strike 5,50 R kullanım ve bilgisayar bağlantısı ile cihaz tanımlamalarına yönelik doğru çalışma alışkanlıkları konusunda bilgiler vermektedir.
İ İŞİ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ
 İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
5-14 KURULUM AYARLARI CALIŞMA FONKSİYONLARI MEKANÝK KURULUM ARIZA DURUMLARI GÜVENLÝK UYARILARI TEKNÝK ÖZELLÝKLER
 3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
FULMATIC 7 GÜMÜŞ SERİSİ PLC PLC KULLANMA KLAVUZU
 FULMATIC 7 GÜMÜŞ SERİSİ PLC PLC KULLANMA KLAVUZU A. GENEL ÖZELLİKLER Fulmatic 7 - Gümüş Serisi PLC ler endüstrinin zorlu şartları göz önüne alınarak, otomasyon ihtiyaçlarına uygun olarak dizayn edilen
FULMATIC 7 GÜMÜŞ SERİSİ PLC PLC KULLANMA KLAVUZU A. GENEL ÖZELLİKLER Fulmatic 7 - Gümüş Serisi PLC ler endüstrinin zorlu şartları göz önüne alınarak, otomasyon ihtiyaçlarına uygun olarak dizayn edilen
Paralel ve Seri İletişim. Asenkron/Senkron İletişim. Şekil 2: İletişim Modları
 Paralel ve Seri İletişim Şekil1a: Paralel İletişim Şekil1b. Seri iletişim Şekil 2: İletişim Modları Asenkron/Senkron İletişim PROTEUS/ISIS SANAL SERİ PORT ile C# USART HABERLEŞMESİ Seri iletişimde, saniyedeki
Paralel ve Seri İletişim Şekil1a: Paralel İletişim Şekil1b. Seri iletişim Şekil 2: İletişim Modları Asenkron/Senkron İletişim PROTEUS/ISIS SANAL SERİ PORT ile C# USART HABERLEŞMESİ Seri iletişimde, saniyedeki
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı
 Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
FRENIC MULTİ ÖZET KULLANIM KLAVUZU
 FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
INVT IVC1. -Kompakt Tip PLC. Marketing 2014 HM
 INVT IVC1 -Kompakt Tip PLC Marketing 2014 HM Özelikler IVC1 Özelikleri Genişleme 128 IO 7 modül genişleme Haberleşme Arayüzü 2 seri port: 1xRS232, 1xRS232/485 Temel komut işlem Hızı 0.3μs Pulse Girişi
INVT IVC1 -Kompakt Tip PLC Marketing 2014 HM Özelikler IVC1 Özelikleri Genişleme 128 IO 7 modül genişleme Haberleşme Arayüzü 2 seri port: 1xRS232, 1xRS232/485 Temel komut işlem Hızı 0.3μs Pulse Girişi
LED YAKMAK. Circuit 2. Kablo LED. Direnç. Arduino LED. Direnç (330ohm)
") Circuit 2 Pin 13 Arduino LED (Light Emitting Diode) 1 LED YAKMAK LED 'ler (light-emitting diodes) bir çok elektronik devrede kullanılan güçlü ışık kaynaklarıdır. Çalışmalarımıza ilk olarak her elektronik
Circuit 2 Pin 13 Arduino LED (Light Emitting Diode) 1 LED YAKMAK LED 'ler (light-emitting diodes) bir çok elektronik devrede kullanılan güçlü ışık kaynaklarıdır. Çalışmalarımıza ilk olarak her elektronik
1. PROGRAMLAMA. PDF created with pdffactory Pro trial version www.pdffactory.com
 . PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
. PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
IBR IMBus Modüller. IMBus evrensel bir Ölçüm kutusudur.
 IMBus evrensel bir Ölçüm kutusudur. Ölçüm Kutusu [IMBus] metroloji ve arayüz alanında bir teknoloji adımıdır. Tüm sensor ve ölçü aletleri için güçlü bağlantı modülleri ile bilgisayar arayüzlerinde maksimum
IMBus evrensel bir Ölçüm kutusudur. Ölçüm Kutusu [IMBus] metroloji ve arayüz alanında bir teknoloji adımıdır. Tüm sensor ve ölçü aletleri için güçlü bağlantı modülleri ile bilgisayar arayüzlerinde maksimum
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER. Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul
 OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
BETİ GSM/GPRS MODEM KULLANIM KILAVUZU
 BETİ GSM/GPRS MODEM KULLANIM KILAVUZU Yayınlanış Tarihi: 01.08.2012 Revizyon:1.2 1 1. MODEM İN ÖZELLİKLERİ: Beti GSM/GPRS modem kartı, kullanıcıların M2M uygulamaları için ihtiyaç duyabilecekleri asgari
BETİ GSM/GPRS MODEM KULLANIM KILAVUZU Yayınlanış Tarihi: 01.08.2012 Revizyon:1.2 1 1. MODEM İN ÖZELLİKLERİ: Beti GSM/GPRS modem kartı, kullanıcıların M2M uygulamaları için ihtiyaç duyabilecekleri asgari
UniGSM Arduino SHIELD (UniGSM-A) KURULUM ve KULLANIM KİTAPÇIĞI
 KURULUM ve KULLANIM KİTAPÇIĞI") UniGSM Arduino SHIELD (UniGSM-A) KURULUM ve KULLANIM KİTAPÇIĞI UniGSM KARTI UniGSM GSM/GPRS kartı, hem Arduino kartlarına hem Raspberry kartlarına hem de bağımsız olarak (Stand alone) kullanılabilen bir
UniGSM Arduino SHIELD (UniGSM-A) KURULUM ve KULLANIM KİTAPÇIĞI UniGSM KARTI UniGSM GSM/GPRS kartı, hem Arduino kartlarına hem Raspberry kartlarına hem de bağımsız olarak (Stand alone) kullanılabilen bir
MEHMET AKİF ERSOY ÜNİVERSİTESİ EĞİTİM FAKÜLTESİ BİLGİSAYAR VE ÖĞRETİM TEKNOLOJİ- LERİ ÖĞRETMENLİĞİ PROJENIN ADI
 T.C MEHMET AKİF ERSOY ÜNİVERSİTESİ EĞİTİM FAKÜLTESİ BİLGİSAYAR VE ÖĞRETİM TEKNOLOJİ- LERİ ÖĞRETMENLİĞİ PROJENIN ADI Ergonomik Eldiven ile Nabız Grafiğinin Gösterimi PROJE DANIŞMANI Yrd. Doç. Dr. OSMAN
T.C MEHMET AKİF ERSOY ÜNİVERSİTESİ EĞİTİM FAKÜLTESİ BİLGİSAYAR VE ÖĞRETİM TEKNOLOJİ- LERİ ÖĞRETMENLİĞİ PROJENIN ADI Ergonomik Eldiven ile Nabız Grafiğinin Gösterimi PROJE DANIŞMANI Yrd. Doç. Dr. OSMAN
Haftalık Ders Saati Okul Eğitimi Süresi
 DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
idea Kontrol Kartı (idea Board jv2.1) Kullanım Kılavuzu
 Kullanım Kılavuzu") idea Kontrol Kartı (idea Board j) Kullanım Kılavuzu 1 Genel Bakış idea (Board) Kontrol Kartı robotbilim ve mekatronik uygulamalar geliştirmek için sizlere yeni bir dünyanın kapılarını aralıyor! Bu kontrol
idea Kontrol Kartı (idea Board j) Kullanım Kılavuzu 1 Genel Bakış idea (Board) Kontrol Kartı robotbilim ve mekatronik uygulamalar geliştirmek için sizlere yeni bir dünyanın kapılarını aralıyor! Bu kontrol
FRENIC MEGA ÖZET KULLANIM KLAVUZU
 FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI:
 ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI: Aduc841 geliştirme kartının genel görüntüsü aşağıda verilmiştir; RS232 ANALOG USB ÇIKIŞ ANALOG GİRİŞ POTLAR TEXT LCD EKRAN GÜÇ KAYNAĞI LEDLER
ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI: Aduc841 geliştirme kartının genel görüntüsü aşağıda verilmiştir; RS232 ANALOG USB ÇIKIŞ ANALOG GİRİŞ POTLAR TEXT LCD EKRAN GÜÇ KAYNAĞI LEDLER
Mikroişlemciler ve Mikrodenetleyiciler
 Mikroişlemciler ve Mikrodenetleyiciler GİRİŞ Mikroişlemci Nedir? Mikroişlemcileri Birbirinden Ayıran Özellikler Mikroişlemciyi Oluşturan Birimler ve Görevleri Bellekler Mikrodenetleyiciler Mikroişlemci
Mikroişlemciler ve Mikrodenetleyiciler GİRİŞ Mikroişlemci Nedir? Mikroişlemcileri Birbirinden Ayıran Özellikler Mikroişlemciyi Oluşturan Birimler ve Görevleri Bellekler Mikrodenetleyiciler Mikroişlemci
WiFi RS232 Converter Sayfa 1 / 12. WiFi RS232 Converter. Teknik Döküman
 WiFi RS232 Converter Sayfa 1 / 12 WiFi RS232 Converter Teknik Döküman WiFi RS232 Converter Sayfa 2 / 12 1. ÖZELLĐKLER 60.20mm x 40.0mm devre boyutları (5-15)VDC giriş gerilimi Giriş ve çalışma gerilimini
WiFi RS232 Converter Sayfa 1 / 12 WiFi RS232 Converter Teknik Döküman WiFi RS232 Converter Sayfa 2 / 12 1. ÖZELLĐKLER 60.20mm x 40.0mm devre boyutları (5-15)VDC giriş gerilimi Giriş ve çalışma gerilimini
GÖRÜNTÜ TABANLI ALGILAMA İLE QUADROTORUN HAREKETLİ BİR CİSMİ TAKİBİ
 GÖRÜNTÜ TABANLI ALGILAMA İLE QUADROTORUN HAREKETLİ BİR CİSMİ TAKİBİ 1 PROJENİN TANIMI Bu projede bir quadrotora, görüntü tabanlı algılama ile hareketli bir nesneyi otonom olarak takip etme özelliği kazandırılmıştır.
GÖRÜNTÜ TABANLI ALGILAMA İLE QUADROTORUN HAREKETLİ BİR CİSMİ TAKİBİ 1 PROJENİN TANIMI Bu projede bir quadrotora, görüntü tabanlı algılama ile hareketli bir nesneyi otonom olarak takip etme özelliği kazandırılmıştır.
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ :
 SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
EC-100. Ethernet RS232/422/485 Çevirici. İstanbul Yazılım ve Elektronik Teknolojileri
 EC-100 Ethernet RS232/422/485 Çevirici İstanbul Yazılım ve Elektronik Teknolojileri EC-100, cihazlarınıza veya bilgisayara RS232/422/485 hattından bağlayarak kullanabileceğiniz tak-kullan şeklinde tasarlanmış
EC-100 Ethernet RS232/422/485 Çevirici İstanbul Yazılım ve Elektronik Teknolojileri EC-100, cihazlarınıza veya bilgisayara RS232/422/485 hattından bağlayarak kullanabileceğiniz tak-kullan şeklinde tasarlanmış
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ PROJE : SUMO ROBOTU PROJE RAPORU
 KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ PROJE : SUMO ROBOTU PROJE RAPORU AYTUĞ DOĞANER 2014010226069 AHMET UYAR 2015010226045 PROJE DANIŞMANI: PROF.DR.AHMET DEMİR 1 İÇİNDEKİLER
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ PROJE : SUMO ROBOTU PROJE RAPORU AYTUĞ DOĞANER 2014010226069 AHMET UYAR 2015010226045 PROJE DANIŞMANI: PROF.DR.AHMET DEMİR 1 İÇİNDEKİLER
2019
 Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU
 FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU FP52 kart okuyucusunu; Mody serisi dış kapı buton modülleri ile birlikte kullanılır. Fp52 ile iki farklı röle çıkışı vardır.500 kullanıcıya kadar tanımlanabilir.
FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU FP52 kart okuyucusunu; Mody serisi dış kapı buton modülleri ile birlikte kullanılır. Fp52 ile iki farklı röle çıkışı vardır.500 kullanıcıya kadar tanımlanabilir.
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ARDUINO-RFID İLE KARTLI KAPI GEÇİŞ SİSTEMİ TASARIM PROJESİ Seçil MATARACI 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK ÜNİVERSİTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ARDUINO-RFID İLE KARTLI KAPI GEÇİŞ SİSTEMİ TASARIM PROJESİ Seçil MATARACI 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK ÜNİVERSİTESİ
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Temizlik Robotu Yetkin AKKAŞ (2015210225003) Danışman Prof. Dr. Ahmet DEMİR 2018 ÖZET Teknolojinin ilerlemesiyle birlikte insanların
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Temizlik Robotu Yetkin AKKAŞ (2015210225003) Danışman Prof. Dr. Ahmet DEMİR 2018 ÖZET Teknolojinin ilerlemesiyle birlikte insanların
SAKARYA ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ GÖMÜLÜ SİSTEMLER DENEY FÖYÜ
 SAKARYA ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ GÖMÜLÜ SİSTEMLER DENEY FÖYÜ UYGULAMA 1 Ekipman Listesi : 1) Arduino Mega yada Uno 2) 1 Adet Led 3) 1 Adet 220 ohm (veya 330 ohm) Direnç 4) Bread Board 5) Jumper
SAKARYA ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ GÖMÜLÜ SİSTEMLER DENEY FÖYÜ UYGULAMA 1 Ekipman Listesi : 1) Arduino Mega yada Uno 2) 1 Adet Led 3) 1 Adet 220 ohm (veya 330 ohm) Direnç 4) Bread Board 5) Jumper
IOT DONANIM ALT YAPISI
 Bölüm 2 IOT DONANIM ALT YAPISI IOT ekosistemi içerisinde pek çok donanım bileşeni kullanılmaktadır. Temel yapıyı devre geliştirme kartları teşkil etmektedir. IOT ekosistemi içerisinde Arduino, Raspberry
Bölüm 2 IOT DONANIM ALT YAPISI IOT ekosistemi içerisinde pek çok donanım bileşeni kullanılmaktadır. Temel yapıyı devre geliştirme kartları teşkil etmektedir. IOT ekosistemi içerisinde Arduino, Raspberry
MPRD-FAZ ALICI ÜNİTE KULLANIM KILAVUZU
 MPRD-FAZ ALICI ÜNİTE KULLANIM KILAVUZU kalite UDEA ELEKTRONİK A.Ş. İçindekiler MPRD-FAZ ALICI ÜNİTE... 2 MPRD-FAZ ALICI ÜNİTENİN GENEL ÖZELLİKLERİ... 2 Kumanda Öğretme İşlemi... 3 Kumanda Silme İşlemi...
MPRD-FAZ ALICI ÜNİTE KULLANIM KILAVUZU kalite UDEA ELEKTRONİK A.Ş. İçindekiler MPRD-FAZ ALICI ÜNİTE... 2 MPRD-FAZ ALICI ÜNİTENİN GENEL ÖZELLİKLERİ... 2 Kumanda Öğretme İşlemi... 3 Kumanda Silme İşlemi...
2. Malzemeler: Bu bölümde size verilecek malzemeler anlatılacaktır ve montaj yaparken dikkat etmeniz gereken hususlar belirtilecektir.
 Bu döküman Mikroişlemciler laboratuarında yapılacak deney ve projelerde kullanılacak olan Programlama ve Port Kartının kurulum ve tanıtım amacı ile hazırlanmıştır.kartın hazırlanmasında yardımlarını esirgemeyen
Bu döküman Mikroişlemciler laboratuarında yapılacak deney ve projelerde kullanılacak olan Programlama ve Port Kartının kurulum ve tanıtım amacı ile hazırlanmıştır.kartın hazırlanmasında yardımlarını esirgemeyen
FPGA İLE UYGULAMA ÖRNEKLERİ FPGA ile Seri Haberleşme (RS232) Uygulaması
 Uygulaması") FPGA ile Seri Haberleşme (RS232) Uygulaması 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda, geliştirme kartımız üzerinde bulunan giriş / çıkış pinlerini FT232RL
FPGA ile Seri Haberleşme (RS232) Uygulaması 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda, geliştirme kartımız üzerinde bulunan giriş / çıkış pinlerini FT232RL
PIC 16F877A ile DA MOTOR KONTROLLÜ ROBOT UYGULAMASI DC MOTOR CONTROLLED ROBOT APPLICATION WITH USING PIC 16F877A
 PIC 16F877A ile DA MOTOR KONTROLLÜ ROBOT UYGULAMASI DC MOTOR CONTROLLED ROBOT APPLICATION WITH USING PIC 16F877A Recep AYRANCI, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Bayram BEDER, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,
PIC 16F877A ile DA MOTOR KONTROLLÜ ROBOT UYGULAMASI DC MOTOR CONTROLLED ROBOT APPLICATION WITH USING PIC 16F877A Recep AYRANCI, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Bayram BEDER, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,
Grove Parmak İzi Okuyucu Sensör ile Arduino Uno
 Grove Parmak İzi Okuyucu Sensör ile Arduino Uno Ürün Linki : http://www.robotistan.com/parmak-izi-okuyucu-sensor-grove-fingerprint- Sensor,PR-1746.html Parmak izi okuyucu modülü farklı programlar aracılığı
Grove Parmak İzi Okuyucu Sensör ile Arduino Uno Ürün Linki : http://www.robotistan.com/parmak-izi-okuyucu-sensor-grove-fingerprint- Sensor,PR-1746.html Parmak izi okuyucu modülü farklı programlar aracılığı
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI ÇİZGİ İZLEYEN ROBOT Anıl toptaş Özenç AKOVA BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI 2013-2014 KARDADENİZ TEKNİK ÜNİVERSİTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI ÇİZGİ İZLEYEN ROBOT Anıl toptaş Özenç AKOVA BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ANABİLİM DALI 2013-2014 KARDADENİZ TEKNİK ÜNİVERSİTESİ
USB 10 IN-OUT. Usb portundan, 10 adet giriş ve çıkış yapabilen, Opto izolasyonlu digital otomasyon devresi.
 USB 10 IN-OUT delab Deniz Elektronik Laboratuvarı Tel&Fax:0216-348 65 21 Usb portundan, 10 adet giriş ve çıkış yapabilen, Opto izolasyonlu digital otomasyon devresi. TTL devreler USB portundan aldığı gerilimle
USB 10 IN-OUT delab Deniz Elektronik Laboratuvarı Tel&Fax:0216-348 65 21 Usb portundan, 10 adet giriş ve çıkış yapabilen, Opto izolasyonlu digital otomasyon devresi. TTL devreler USB portundan aldığı gerilimle
YENİLENEBİLİR ENERJİ EĞİTİM SETİ
 YENİLENEBİLİR ENERJİ EĞİTİM SETİ Yenilenebilir enerji sistemleri eğitim seti temel olarak rüzgar türbini ve güneş panelleri ile elektrik üretimini uygulamalı eğitime taşımak amacıyla tasarlanmış, kapalı
YENİLENEBİLİR ENERJİ EĞİTİM SETİ Yenilenebilir enerji sistemleri eğitim seti temel olarak rüzgar türbini ve güneş panelleri ile elektrik üretimini uygulamalı eğitime taşımak amacıyla tasarlanmış, kapalı
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
ACD BİLGİ İŞLEM ACD KABLOSUZ VERİ TOPLAMA SİSTEMLERİ URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ. URT-V2 Terminallerinin
 ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
T.C. KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ RENK AYIRT EDEBİLEN ROBOT KOLU BİTİRME TEZİ
 T.C. KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ RENK AYIRT EDEBİLEN ROBOT KOLU BİTİRME TEZİ Candaş GÜNGÖR 2015110226011 Gürol Burak IRMAK 2015210226009 Mert MUTLU 2014210226001
T.C. KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ RENK AYIRT EDEBİLEN ROBOT KOLU BİTİRME TEZİ Candaş GÜNGÖR 2015110226011 Gürol Burak IRMAK 2015210226009 Mert MUTLU 2014210226001