ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS)
|
|
|
- Ekin Göllü
- 8 yıl önce
- İzleme sayısı:
Transkript
1 ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS)

2 1. Giriş Adım (Step) Motorları Açısal konumu adımlar halinde değiştiren, çok hassas sinyallerle sürülen motorlara adım motorları denir. Adından da anlaşılacağı gibi adım motorları belirli adımlarla hareket ederler. Bu adımlar, motorun sargılarına uygun sinyaller gönderilerek kontrol edilir. Herhangi bir uyartımda, motorun yapacağı hareketin ne kadar olacağı, motorun adım açısına bağlıdır. Adım açısı motorun yapısına bağlı olarak 90, 45, 18, 75, 18 veya daha değişik açılarda olabilir Motora uygulanacak sinyallerin frekansı değiştirilerek motorun hızı kontrol edilebilir. Adım motorlarının dönüş yönü uygulanan sinyallerin sırası değiştirilerek saat ibresi yönü (CW) veya saat ibresinin tersi yönünde (CCW) olabilir.

3 Adım motorlarının hangi yöne doğru döneceği, devir sayısı, dönüş hızı gibi değerler mikroişlemci veya bilgisayar yardımı ile kontrol edilebilir. Sonuç olarak adım motorlarının hızı, dönüş yönü ve konumu her zaman bilinmektedir. Bu özelliklerinden dolayı adım motorları çok hassas konum kontrolü istenen yerlerde çok kullanılırlar. Adım motorlarının kullanıldıkları yerlere örnek olarak, endüstriyel kontrol teknolojisi içerisinde bulunan bazı sistemler, robot sistemleri, takım tezgahlarının ayarlama ve ölçmeleri verilebilir. Ayrıca, adım motorları konumlandırma sistemlerinde ve büro makineleri ile teknolojisi alanında da kullanma alanı bulmaktadır.

4 Adım motorlarının bu kadar çok kullanılma alanı bulmasının nedeni bu motorların bazı avantajlara sahip olmasıdır. Bu avantajlar aşağıdaki gibi sıralanabilir; Geri beslemeye ihtiyaç göstermezler. Açık döngülü olarak kontrol edilebilirler, Motorun hareketlerinde konum hatası yoktur, Sayısal olarak kontrol edilebildiklerinden bilgisayar veya mikroişlemci gibi elemanlarla kontrol edilebilirler, Mekanik yapısı basit olduğundan bakım gerektirmezler, Herhangi bir hasara yol açmadan defalarca çalıştırılabilirler.

5 Adım motorlarının bu avantajları yanında bazı dezavantajları da aşağıdaki şekilde sıralanabilir, Adım açıları sabit olduğundan hareketleri sürekli değil darbelidir, Sürtünme kaynaklı yükler, açık döngülü kontrolde konum hatası meydana getirirler, Elde edilebilecek güç ve moment sınırlıdır.

6

7

8 2. Adım Motoru Çeşitleri Kullanımda olan birçok elektrik motorunda olduğu gibi adım motorları da makinenin yapısına ve çalışmasına göre sınıflandırılabilir. Değişken Relüktanslı (DR) Adım motorları, Sabit Mıknatıslı (SM) Adım motorları, Karışık Yapılı (Hybrid) Adım motorları.
 Adım motorları, Sabit Mıknatıslı (SM) Adım")
9 Değişken Relüktanslı (DR) Adım Motorları Değişken relüktanslı adım motoru en temel adım motoru tipidir. Bu motorun temel prensiplerinin daha iyi anlaşılabilmesi için kesit görünüşü Şekil 1 de gösterilmiştir. Bu üç-fazlı motorun 6 adet stator kutbu vardır. Birbirine 180 açılı olan herhangi iki stator kutbu aynı faz altındadır. Bunun anlamı, karşılıklı kutupların üzerindeki sargıların seri veya paralel olması demektir. Rotor 4 adet kutba sahiptir. Şekil 1. Değişken Relüktanslı Adım motoru Stator ve rotor nüveleri genellikle ince tabakalı silisli çelikten yapılırlar. Düşük manyetomotor kuvveti uygulansa bile, stator ve rotor malzemeleri yüksek geçirgenlikli ve içlerinden yüksek magnetik akı geçecek kapasitede olmalıdır.

10 Şekil 2. 4-fazlı SM adım motoru Sabit Mıknatıslı (SM) Adım Motorları Rotorunda sabit mıknatıs kullanılan adım motoruna sürekli mıknatıslı adım motoru adı verilir. 4-fazlı bir SM adım motorunun bir örneği Şekil 2 de gösterilmiştir. Silindirik sabit mıknatıs rotor gibi çalışır, etrafında ise her biri üzerine sargılar sarılı olan 4 adet kutbun bulunduğu stator vardır. Burada C ile adlandırılan terminal, her bir fazın birer uçlarının birleştirilerek güç kaynağının pozitif ucuna bağlandığı ortak uçtur. Eğer fazlar Faz1, Faz2, Faz3, Faz4 sırasıyla uyartılırsa; rotor saat ibresi yönünde (CW) hareket edecektir. Bu motorda, adım açısının 90 olduğu açıkça görülmektedir.

11 Sabit Mıknatıslı (SM) Adım Motorları SM adım motorunda adım açısını azaltmak için, manyetik kutup sayısı ile birlikte stator kutup sayısı arttırılmalıdır. Fakat her ikisinin de bir sınırı vardır. Buna alternatif olarak küçük adım açılarına sahip karışık yapıdaki SM adım motorları kullanılmaktadır Şekil 2. 4-fazlı SM adım motoru

12 Şekil 3. Karışık yapılı adım motorunun yapısı Karışık Yapılı (Hybrid) Adım Motorları Rotorunda sabit mıknatıs bulunan bir diğer adım motoru da karışık yapılı adım motorudur. Hybrid kelimesi motorun sabit mıknatıslı ve değişken relüktanslı motorların prensiplerinin birleşmesinden dolayı verilmiştir. Günümüzde çok geniş bir kullanım alanına sahip olan Hybrid adım motorunun yapısı Şekil 3 ve 4 te verilmiştir. Statorun nüve yapısı değişken relüktanslı adım motorunun aynısı veya çok benzeridir. Fakat sargıların bağlantısı değişken relüktanslı motorunkinden farklıdır.

13 Karışık Yapılı (Hybrid) Adım Motorları Şekil 4. Karışık yapılı adım motorunun yapısı Değişken relüktanslı adım motorunda bir kutupta bir fazın iki sargısından sadece bir tanesi sarılmış iken, 4 fazlı karışık yapılı adım motorunda iki farklı fazın sargıları aynı kutupta sarılmıştır. Bundan dolayı bir kutup sadece bir fazın altında değildir. Karışık yapılı adım motorlarında moment, diş yapılarındaki hava aralıklarının manyetik alanlarının etkileşimi ile oluşturulur. Bu tip motorlarda sürekli mıknatıs, sürücü kuvveti oluşturmak için önemli rol oynamaktadır. Fakat karışık yapılı adım motorundaki rotor ve stator dişlerinin küçük adım açıları elde etmek için dizayn edildiği bilinmelidir.

14 3. Adım Motorlarına Ait önemli Parametreler a) Çözünürlük Çözünürlük; bir devirdeki adım sayısı veya dönen motorlar için adım açısı (derece), lineer motorlar için ise adım uzunluğu (mm) olarak tanımlanır. Bu sabit değer, üretim sırasında tesbit edilen bir büyüklüktür. Bir adım motorunun adım büyüklüğü, çeşitli kontrol düzenleri ile değiştirilebilir. Yarım adım çalışmada adım büyüklüğü normal değerinin (çözünürlüğünün) yarısına indirilir.

15 3. Adım Motorlarına Ait önemli Parametreler b) Doğruluk Bir adım motorunun adım konumu, tasarım ve üretim sırasında bir araya getirilen birçok parçanın boyutları ile belirlenir. Bu parçaların boyutlarındaki toleranslar ve dahili sürtünmeler adımların nominal denge konumlarında da toleranslara neden olurlar. Bu durum adım motorunun doğruluğu olarak isimlendirilir ve belli bir konumdaki maksimum açısal hatanın nominal tek adım değerinin yüzdesi olarak ifade edilmiş halidir. Klasik adım motorlarında bu hata % ± 1 ile % ± 5 arasında değişmektedir Sürtünme momenti veya kuvveti nedeniyle oluşan konum hataları bu doğrulukla ilgisi olmayan, daha az veya çok olabilen rast gele hatalardır. Ancak her iki tip hata toplanarak sistemin toplam hatası elde edilir.

16 c) Tutma momenti Tutma momenti, bir adım motorunun en temel moment karakteristiğidir. Tutma momenti eğrisi, motorun ürettiği tutma momentinin rotor konumuna bağlı olarak değişimini veren eğridir. Eğrinin merkezi motorun bir fazının uyartılmış olduğu durumda rotorun kararlı adım konumuna karşılık düşer. Bu eğri, rotor adım pozisyonundan uzaklaştırılırsa, motorda endüklenecek olan ve rotoru sıfır momentli adım pozisyonuna geri getirmeye çalışan momentin (tutma momenti) yönünü ve miktarını verir. Tutma momenti eğrisi, motorun tüm rotor konumları ve statik uyarma koşullarındaki ani momentini tam olarak tanımlamak için gereklidir. Diğer moment karakterisitikleri (statik ve dinamik) bu eğri baz alınarak elde edilebilir.
 yönünü ve")
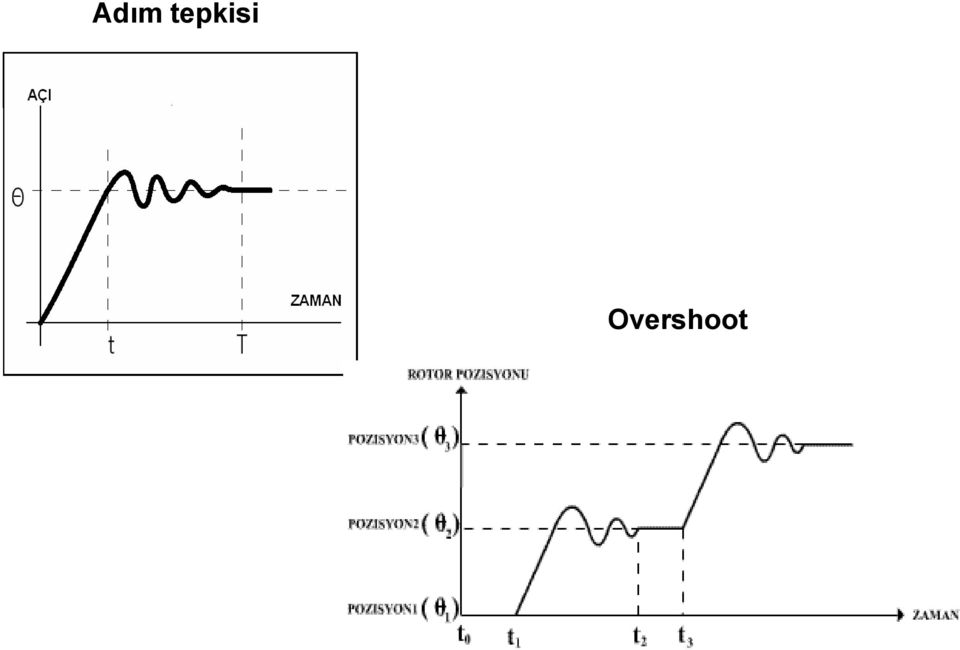
17 d) Tek adım tepkisi Motor fazlarından biri uyarılmış durumdaysa motor kararlı bir adım konumundadır. Bu fazın uyartımı kesilip yeni bir faz uyartılırsa motor bir adım atacaktır. Rotor konumunun zamana göre bu değişimi tek adım tepkisi olarak tanımlanır. Tek adım tepkisi, motorun adım hareketinin hızını, tepkinin aşım ve salınım miktarını, adım açısının hassaslığını veren önemli bir karakteristiktir. Adım motorlarından maksimum performans elde edebilmek için tek adım tepkisindeki aşım ve salınımların azaltılması ve yerleşme zamanının kısaltılması gerekmektedir. Bu nedenle tek adım tepkisinin iyileştirilmesi adım motorlarının kontrolünde çok büyük öneme sahiptir.

18 e) Sürekli rejimde maksimum yük momenti eğrisi Sürekli rejimde maksimum yük momenti/ hız eğrisi herhangi bir sabit dönüş hızında, rotor hareketinin giriş darbe dizisiyle olan senkronizasyonunu bozmadan ve rotorun durmasına neden olmadan sürekli halde motor miline uygulanabilecek maksimum yük momentini verir. Bu moment aynı zamanda, söz konusu hızda motorda meydana gelecek maksimum moment anlamına da gelmektedir. Klasik motorlarda bu eğriye karşılık gelebilecek bir karakteristik yoktur. Maksimum yük momenti eğrisi çalışma noktalarını göstermediği gibi bir transfer fonksiyonu eğrisi de değildir. Sadece, çalışma bölgesini sınırlar. Bu eğrinin sınırladığı bölge içinde herhangi bir noktada motor giriş darbe dizilerini kaybetmeden ve durma tehlikesi olmadan ilgili hız ve yük momenti ile çalışır. Sınırların dışına çıkıldığında bu durum değişebilir.

19 e) Kalkışta maksimum yük momenti eğrisi Özellikle açık döngülü sistemlerde duran bir sistemi istenen pozisyona getirebilmek için motora uygulanan uyartım darbelerinin motor tarafından hiç kaçırılmadan takip edilmesini sağlamak çok önemlidir. Fakat uygulanan uyartım sinyallerin sıklığı, motorun miline bağlı yükü sıfır hızından itibaren kaldırıp hızlandırmasına izin vermeyebilir Bu yüzden adım motorları için, kalkışta maksimum yük momenti eğrileri tanımlanır Şekil 5 te sürekli rejimde maksimum yük momenti ve kalkışta maksimum yük momenti eğrileri gösterilmiştir. Şekil 5. Sürekli rejimde ve kalkışta max yük momenti/hız eğrileri

20 Adım tepkisi Overshoot
21 Adım Motorlarının Uyartımı Tek-faz uyartımı Motor sargılarının sadece birinin uyartıldığı uyartım cinsine tek-faz uyartımı adı verilir. Çizelge1 de 4-fazlı adım motoru için tek-faz uyartım sırasındaki fazların durumu görülmektedir. Bu uyartım metodunda rotor her bir uyartım sinyali için tam adımlık bir hareket yapmaktadır. Uyartım dönüş yönüne bağlı olarak sıra ile yapılır. Burada fazların uyartım sırası saat ibresi yönündeki (CW) dönüş için F1, F2, F3, F4, saat ibresinin tersi yönü (CCW) için F4, F3, F2, F1 şeklindedir. İki-faz uyartım Motor sargılarının ikisinin sıra ile aynı anda uyartıldığı uyartım cinsine iki-faz uyartımı adı verilir. Çizelge 2 de 4-fazlı adım motoru için iki-faz uyartım sırasındaki fazların durumu görülmektedir. İki faz uyartımlıda rotorun geçici durum tepkisi tek-faz uyartımlıya göre daha hızlıdır Fakat burada güç kaynağından çekilen güç iki katına çıkmaktadır.
22 Çizelge 1. Tek-faz uyartımın faz uyartım sıralaması Adım R Faz 1 x x x Faz 2 x x Faz 3 x x Faz 4 x x Çizelge 2. İki-faz uyartımın faz uyartım sıralaması Adım R Faz 1 x x x x x Faz 2 x x x x Faz 3 x x x x Faz 4 x x x x x
23 Karma uyartım Bu uyartım yönteminde tek-faz uyartımı ile iki-faz uyartımı ardarda uygulanır. Burada rotor herbir uyartım sinyali için yarım adımlık bir hareket yapmaktadır. Çizelge 3 te fazların uyartım sırası görülmektedir. Bu uyartım metodunda adım açısı yarıya düştüğünden adım sayısı iki katına çıkmaktadır. Çizelge 3. Karma uyartımın faz uyartım sıralaması Adım R Faz 1 x x x x Faz 2 x x x Faz 3 x x x Faz 4 x x x
")
24 Tek-faz uyartı (1 Fazlı Tam Adımlı)

25 İki-faz uyartım (2 Fazlı Tam Adımlı)

26 Karma uyartım (2 Fazlı Yarım Adımlı)
27 4. Adım Motorlarının Denetimi Açık döngü denetim Şekil 6 da açık döngü denetim için blok diyagramı görülmektedir. Sayısal kontrol sinyalleri denetleyici tarafından üretilir ve sürücü devre tarafından yükseltilip adım motorunun sargılarına uygulanır. Eğer denetleyici olarak mikroişlemci veya bilgisayar kullanılırsa bu elemanların getirdiği esnekliklerden dolayı aynı denetleyici ile farklı adım motorları kontrol edilebilir. Kontrol edilecek adım motorları 3, 4 veya daha farklı faz sayısına sahip olabilir. Ayrıca kullanılacak uyartım metodu için tek-fazlı, iki-fazlı veya yarım adım uyartımlarından herhangi biri seçilebilir. Bu uyartım metotlarından hangisinin kullanılacağı daha önce de açıklandığı gibi motorun kullanılacağı sisteme bağlıdır.
28 Şekil 6. Açık döngülü denetim Denetleyici tasarlanırken motorun cinsi ve yükün durumu gözönünde bulundurulmalıdır. Bu sırada meydana gelen sınırlamalar kalıcı veya geçici durum sınırlamaları olabilir. Açık döngülü denetimde motorun konumu bilinmediğinden dolayı motorun gönderilen bütün adım komutlarını yerine getirdiği varsayılmaktadır. Eğer uyartım hızı çok yüksek ise, motor adım komutlarından bir kısmını yerine getiremeyebilir. Bu durumda kalıcı bir hata meydana gelir. Bu tür hataların meydana gelmemesi için motor yükünün en büyük olduğu durum göz önüne alınarak hata yapılmayan en yüksek hız belirlenip, bu hızın üzerindeki hızlarda uyartım yapılmamalıdır.
29 Kapalı Döngü Denetim Kapalı döngü sistemlerde ani rotor konumu sezilerek denetim birimine iletilir. Her adım komutu için bir önceki komutun gerçekleştirildiği adım bilgisi alınarak uygulanır. Bu nedenle motor ile denetleyici arasında herhangi bir adım kaybı olmaz. Kapalı döngü denetime bir örnek Şekil 7 de gösterilmiştir. Şekil 7. Adım motorunun kapalı döngülü denetimi
30 İlk olarak geri sayıcıya hedef konum yüklenir. Daha sonra başla komutu verilerek adım komutlarının sıralayıcıya uygulanması sağlanır. Adım komutlarına bağlı olarak motor adım hareketi yapmaya başlar. İlk adım tamamlanınca, konum sezici geri sayıcıyı ve denetim birimlerini uyarır ve geri sayıcı değeri bir azalır. Eğer bu denetim açık döngülü yapılırsa, geri sayıcı adım komutlarının sayısını yine saklar fakat komutun uygulanıp uygulanmadığı bilinmez. Konum sezici, denetim birimine yeni adım komutu üretimi için sinyal gönderir. Ağır yükler için adım komutları arası sürenin daha büyük olması nedeniyle adım komutlarının ard arda gelmesi istenmez. Yüke göre hız ayarlaması yapılır ve motor hedef konuma gelene kadar bu olaylar tekrarlanır. Adım motoru hedef konuma gelince denetim birimi dur komutu ile uyarılarak yeni adım komutu üretilmesi engellenir.kapalı döngü sistemi, adım motorunu yük durumunu da göz önüne alarak uyartım sürelerini ayarlar ve en uygun hız profilinde çalıştırır.
31 5. Adım Motoru Sürücü Sistemleri Şekil 8 de bir adım motoru için gerekli olan sürücü devrenin blok diyagramı gösterilmiştir. Şekil 8.a da motorun lojik sıralayıcısı, Şekil 8.b de ise giriş kontrolörü gösterilmiştir. a)lojik sıralayıcının motora bağlantısı b) Giriş kontrolörü Şekil 8. Adım motoru sürücü sisteminin blok diyagramı
32 Lojik Sıralayıcı Bu sistemde lojik sıralayıcı giriş kontrolöründen aldığı sinyali faz sayısına uygun sıralayarak motorun dönmesini sağlar. Sıralayıcı genellikle shift-register, NAND (ve değil), NOR( veya değil), NOT( değil) gibi lojik kapılardan oluşturulur. Özel amaçlı sıralayıcı için, J-K flip flop entegreleri ve lojik kapıların uygun kombinasyonları uygulanabilir. J-K flip-flop ve çeşitli lojik kapılar kullanılarak elde edilen sıralama devresi Şekil 9 da ve bu devrenin ürettiği sinyaller Şekil 10 da gösterilmiştir. Şekil 9. 4-fazlı adım motoru için lojik sıralayıcı Şekil 10. Lojik sıralayıcının ürettiği sıralama
33 Sürücü devre 4-fazlı bir adım motorunu sürmek için örnek sürücü devre Şekil 11 de gösterilmiştir. Adım motoru 4-fazlı karışık yapılı (Hybrid) adım motoru olup tam-adım ve her adımda iki faz uyartımlı olacak şekilde sürülmektedir. Sargıların uyartımı için her faza darlington çifti ve koruma diyotu içeren güç transistörleri kullanılmıştır. Motorların çalışması için gerekli olan enerji DA güç kaynağından sağlanmaktadır. Normalde 4-fazlı motorun sürülmesi ve fazların sırayla enerjilenmesi için mikroişlemci yada bilgisayardan 4-bitlik sinyal elde etmek gerekmektedir. Burada ise fazların sıralanması lojik sıralayıcı kullanılarak sağlanmıştır. Böylece her bir motor için 4-bitlik çıkış yerine 2-bitlik bilgi yeterli olmaktadır. Lojik sıralayıcının sıralama yapması için bir clock sinyaline bir de yön sinyaline gerek vardır. Bilgisayar veya mikroişlemcinin yön sinyali çıkışı 1 seviyesinde ise motor ileri, 0 seviyesinde ise geri yönde dönmektedir.
34 Şekil 11 4-fazlı adım motoru sürücü devresi
35 ADIM MOTORUNUN AVANTAJLARI Dijital giriş işaretlerine cevap veririler, Her an bu motorların dönüş yönü,hızı ve konumu bilinebilir, Geri beslemeye ihtiyaç duymaksızın açık çevrim çalışabilirler, Giriş işaretlerinin frekansına bağlı kalmaksızın çok geniş bir hız aralığında sürülebilirler, Herhangi bir hasara yol açmadan defalarca durdurulup çalıştırılabilirler, Her yeni adımla artan konum hataları yoktur, Mekanik yapısı basit olduğundan bakım gerektirmezler, Yağlanma ve kirlenme problemleri yoktur.
36 ADIM MOTORUN DEZAVANTAJLARI Adım açıları sabit olduğundan rotordan alınan hareket sürekli değil darbelidir, Klasik sürücülerle kullanıldıklarında verimleri düşüktür, Adım cevapları nispeten aşımlı ve salınımlıdır, Yüksek eylemsizlikli yüklerde yetenekleri sınırlıdır, Elde edilecek çıkış gücü ve momenti sınırlıdır, İyi kontrol edilmezse rezonans meydana gelir, Oldukça yüksek hızlarda çalıştırmak pek kolay değildir.
37 ADIM MOTORLARIN KULLANIM ALANLARI Endüstride bir çok kontrol sistemlerinde hassas konum kontrolü yapmak için kullanılır, Yazıcılar (printer), Çiziciler (plotter), Disket sürücüler (floppy driver), Harddisk sürücüler, Sayısal kontrol sistemleri, CNC tezgahları, Proses kontrol sistemleri, Uzay endüstrisi, Robot teknolojisi (milimetrik hareketlerin kontrolü).
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ELEKTRİK- ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK- ELEKTRONİK TEKNOLOJİSİ STEP VE SERVO MOTORLAR 522EE0096 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK- ELEKTRONİK TEKNOLOJİSİ STEP VE SERVO MOTORLAR 522EE0096 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ STEP VE SERVO MOTORLAR ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ STEP VE SERVO MOTORLAR ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
Transformatörler MANYETİK PRENSİPLER
 NYETİK PRENSİPLER İçinden akım geçen bir iletken etrafında manyetik alan oluşturur (Elektromanyetizma). Değişken manyetik alan içindeki hareketsiz bir iletkende gerilim meydana gelir. (Transformatör Prensibi)
NYETİK PRENSİPLER İçinden akım geçen bir iletken etrafında manyetik alan oluşturur (Elektromanyetizma). Değişken manyetik alan içindeki hareketsiz bir iletkende gerilim meydana gelir. (Transformatör Prensibi)
Transformatörler MANYETİK PRENSİPLER
 NYETİK PRENSİPLER İçinden akım geçen bir iletken etrafında manyetik alan oluşturur (Elektromanyetizma). anyetik alana hareketsiz bir iletken sokulursa içinden bir akım akar (Transformatör Prensibi) anyetik
NYETİK PRENSİPLER İçinden akım geçen bir iletken etrafında manyetik alan oluşturur (Elektromanyetizma). anyetik alana hareketsiz bir iletken sokulursa içinden bir akım akar (Transformatör Prensibi) anyetik
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
Elektrik Motorları ve Sürücüleri
 Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
İÇİNDEKİLER. BÖLÜM-1-ÜÇ FAZLI ASENKRON MOTORLARIN YAPISI VE ÇALIġMA PRENSĠBĠ
 İÇİNDEKİLER BÖLÜM-1-ÜÇ FAZLI ASENKRON MOTORLARIN YAPISI VE ÇALIġMA PRENSĠBĠ Asenkron motorların endüstrideki önemi Turmetre ile asenkron motorun devrinin ölçülmesi ve kayma deneyi Senkron hız, Asenkron
İÇİNDEKİLER BÖLÜM-1-ÜÇ FAZLI ASENKRON MOTORLARIN YAPISI VE ÇALIġMA PRENSĠBĠ Asenkron motorların endüstrideki önemi Turmetre ile asenkron motorun devrinin ölçülmesi ve kayma deneyi Senkron hız, Asenkron
Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır.
 ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
Yumuşak Yol Vericiler - TEORİ
 Yumuşak Yol Vericiler - TEORİ 1. Gerilimi Düşürerek Yolverme Alternatif akım endüksiyon motorları, şebeke gerilimine direkt olarak bağlandıklarında, yol alma başlangıcında şebekeden Kilitli Rotor Akımı
Yumuşak Yol Vericiler - TEORİ 1. Gerilimi Düşürerek Yolverme Alternatif akım endüksiyon motorları, şebeke gerilimine direkt olarak bağlandıklarında, yol alma başlangıcında şebekeden Kilitli Rotor Akımı
Servo Motor. Servo Motorların Kullanıldığı Yerler
 Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Anma güçleri 3 kw tan büyük olan motorların üç fazlı şebekelere bağlanabilmeleri için üç fazlı olmaları gerekir.
 Elektrik motorlarında yol verme işlemi Motorun rotor hızının sıfırdan anma hızına hızına ulaşması için yapılan işlemdir. Durmakta olan motorun stator sargılarına gerilim uygulandığında endüklenen zıt emk
Elektrik motorlarında yol verme işlemi Motorun rotor hızının sıfırdan anma hızına hızına ulaşması için yapılan işlemdir. Durmakta olan motorun stator sargılarına gerilim uygulandığında endüklenen zıt emk
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI
 DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
ELEKTRĐK MOTORLARI ve SÜRÜCÜLERĐ DERS 02
 DERS 02 Özer ŞENYURT Mart 10 1 DA DĐNAMOSUNUN ÇALIŞMA PRENSĐBĐ Dinamolar elektromanyetik endüksiyon prensibine göre çalışırlar. Buna göre manyetik alan içinde bir iletken manyetik kuvvet çizgilerini keserse
DERS 02 Özer ŞENYURT Mart 10 1 DA DĐNAMOSUNUN ÇALIŞMA PRENSĐBĐ Dinamolar elektromanyetik endüksiyon prensibine göre çalışırlar. Buna göre manyetik alan içinde bir iletken manyetik kuvvet çizgilerini keserse
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ EELP212 DERS 05
 EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
18. FLİP FLOP LAR (FLIP FLOPS)
") 18. FLİP FLOP LAR (FLIP FLOPS) Flip Flop lar iki kararlı elektriksel duruma sahip olan elektronik devrelerdir. Devrenin girişlerine uygulanan işarete göre çıkış bir kararlı durumdan diğer (ikinci) kararlı
18. FLİP FLOP LAR (FLIP FLOPS) Flip Flop lar iki kararlı elektriksel duruma sahip olan elektronik devrelerdir. Devrenin girişlerine uygulanan işarete göre çıkış bir kararlı durumdan diğer (ikinci) kararlı
Endüstriyel Ölçme ve Kontrol
 TEKNİK BİLİMLER MESLEK YÜKSEKOKULU Yüzey Pürüzlülüğünün Tanımı Bir parçanın yüzey özellikleri, parçanın ilgili bir yüzeyinin dik kesitinin büyültülerek çizilmiş resmi üzerinde incelenir. Endüstriyel Ölçme
TEKNİK BİLİMLER MESLEK YÜKSEKOKULU Yüzey Pürüzlülüğünün Tanımı Bir parçanın yüzey özellikleri, parçanın ilgili bir yüzeyinin dik kesitinin büyültülerek çizilmiş resmi üzerinde incelenir. Endüstriyel Ölçme
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
 BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
Elektrik Makinaları I SENKRON MAKİNALAR
 Elektrik Makinaları I SENKRON MAKİNALAR Dönen Elektrik Makinaları nın önemli bir grubunu oluştururlar. (Üretilen en büyük güç ve gövde büyüklüğüne sahip dönen makinalardır) Generatör (Alternatör) olarak
Elektrik Makinaları I SENKRON MAKİNALAR Dönen Elektrik Makinaları nın önemli bir grubunu oluştururlar. (Üretilen en büyük güç ve gövde büyüklüğüne sahip dönen makinalardır) Generatör (Alternatör) olarak
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
ASENKRON (İNDÜKSİYON)
") ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
SENKRON MAKİNA DENEYLERİ
 DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
9. Güç ve Enerji Ölçümü
 9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü. Doğru Akım Makinaları - I
 KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü 1. Deneyin Adı Doğru Akım Makinaları 2. Deneyi Amacı Doğru akım motorunun yük eğrilerinin elde edilmesi 3. Deneye
KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü 1. Deneyin Adı Doğru Akım Makinaları 2. Deneyi Amacı Doğru akım motorunun yük eğrilerinin elde edilmesi 3. Deneye
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
Bilezikli Asenkron Motora Yol Verilmesi
 Bilezikli Asenkron Motora Yol Verilmesi 1. GİRİŞ Bilezikli asenkron motor, sincap kafesli asenkron motordan farklı olarak, rotor sargıları dışarı çıkarılmış ve kömür fırçaları yardımıyla elektriksel bağlantı
Bilezikli Asenkron Motora Yol Verilmesi 1. GİRİŞ Bilezikli asenkron motor, sincap kafesli asenkron motordan farklı olarak, rotor sargıları dışarı çıkarılmış ve kömür fırçaları yardımıyla elektriksel bağlantı
LABİRENTTEN ÇIKIŞ YOLUNU BULAN ROBOT
 ELEKTRİK MÜHENDİSLERİ ODASI İSTANBUL ŞUBESİ 2006-2007 ÖĞRETİM YILI PROJE YARIŞMASI LABİRENTTEN ÇIKIŞ YOLUNU BULAN ROBOT HAZIRLAYANLAR Hamdi Ertan YAŞAR Duygu ÇULUM Süleyman ÇİÇEK PROJE YÖNETİCİSİ Yrd.
ELEKTRİK MÜHENDİSLERİ ODASI İSTANBUL ŞUBESİ 2006-2007 ÖĞRETİM YILI PROJE YARIŞMASI LABİRENTTEN ÇIKIŞ YOLUNU BULAN ROBOT HAZIRLAYANLAR Hamdi Ertan YAŞAR Duygu ÇULUM Süleyman ÇİÇEK PROJE YÖNETİCİSİ Yrd.
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1
 6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
ASENKRON MAKİNELER. Asenkron Motorlara Giriş
 ASENKRON MAKİNELER Asenkron Motorlara Giriş İndüksiyon motor yada asenkron motor (ASM), rotor için gerekli gücü komitatör yada bileziklerden ziyade elektromanyetik indüksiyon yoluyla aktaran AC motor tipidir.
ASENKRON MAKİNELER Asenkron Motorlara Giriş İndüksiyon motor yada asenkron motor (ASM), rotor için gerekli gücü komitatör yada bileziklerden ziyade elektromanyetik indüksiyon yoluyla aktaran AC motor tipidir.
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
Bir motorun iç yapısı çok farklı gözükse bile, motorun uç davranışını bu iki türün birisi cinsinden tanımlamak her zaman mümkündür.
 K TÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemciler Laboratuarı ADIM MOTORUNUN MĐKROBĐLGĐSAYARLARLA DENETĐMĐ 1. GENEL TANITIM Adım motorları, küçük momentli sayısal uygulamalarda
K TÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemciler Laboratuarı ADIM MOTORUNUN MĐKROBĐLGĐSAYARLARLA DENETĐMĐ 1. GENEL TANITIM Adım motorları, küçük momentli sayısal uygulamalarda
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
3 FAZLI ASENKRON MOTORLAR
 3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA
 A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA İÇİNDEKİLER Sayaçlar Elektrik Sayaçları ELEKTRİK SAYAÇLARI Elektrik alıcılarının gücünü ölçen aygıt wattmetre, elektrik alıcılarının yaptığı
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA İÇİNDEKİLER Sayaçlar Elektrik Sayaçları ELEKTRİK SAYAÇLARI Elektrik alıcılarının gücünü ölçen aygıt wattmetre, elektrik alıcılarının yaptığı
EGE ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMO İZMİR ŞUBESİ İÇİN
 EGE ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMO İZMİR ŞUBESİ ELEKTRİK ELEKTRONİK MÜHENDİSLERİ İÇİN SMM DERS TAMAMLAMA KURSU YÜKSEK GERİLİM TEKNİĞİ ELEKTRİK MAKİNELERİ ENERJİ DAĞITIMI 06 Ocak-15
EGE ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMO İZMİR ŞUBESİ ELEKTRİK ELEKTRONİK MÜHENDİSLERİ İÇİN SMM DERS TAMAMLAMA KURSU YÜKSEK GERİLİM TEKNİĞİ ELEKTRİK MAKİNELERİ ENERJİ DAĞITIMI 06 Ocak-15
ELEKTRİK MOTORLARI VE SÜRÜCÜLER ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ
 BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
ENDÜSTRİYEL BİR TESİSTE DİNAMİK KOMPANZASYON UYGULAMASI
 ENDÜSTRİYEL BİR TESİSTE DİNAMİK KOMPANZASYON UYGULAMASI Özgür GENCER Semra ÖZTÜRK Tarık ERFİDAN Kocaeli Üniversitesi Mühendislik Fakültesi, Elektrik Mühendisliği Bölümü, Kocaeli San-el Mühendislik Elektrik
ENDÜSTRİYEL BİR TESİSTE DİNAMİK KOMPANZASYON UYGULAMASI Özgür GENCER Semra ÖZTÜRK Tarık ERFİDAN Kocaeli Üniversitesi Mühendislik Fakültesi, Elektrik Mühendisliği Bölümü, Kocaeli San-el Mühendislik Elektrik
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Adım Motoru: açıya adım. Şekil 8.2 tekyönlü. Lab 8. Siyah (A) Mavi ( B ) Kırmızı (B)
 Mavi ( B ) Kırmızı (B)") 446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
Bölüm 4 Ardışıl Lojik Devre Deneyleri
 Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
DENEY 2- Sayıcılar. 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi.
 DENEY 2- Sayıcılar DENEY 2- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL BİLGİLER Sayıcılar flip-floplar
DENEY 2- Sayıcılar DENEY 2- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL BİLGİLER Sayıcılar flip-floplar
Bir Adım (Step) motor;
 motor;") Adım (step) motorlar Adım (Step) motorları adından da anlaşılacağı gibi Adım Adım hareket eden yani sargılarından birinin enerjilenmesi ile sadece 1 Adım hareket eden motorlardır. Bu Adımın kaç derece
Adım (step) motorlar Adım (Step) motorları adından da anlaşılacağı gibi Adım Adım hareket eden yani sargılarından birinin enerjilenmesi ile sadece 1 Adım hareket eden motorlardır. Bu Adımın kaç derece
326 ELEKTRİK MAKİNALARI LABORATUVARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 326-04
 MOTOR DENEY 326-04") İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
T.C İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ KONTROL MÜHENDİSLİĞİ BÖLÜMÜ
 T.C İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ KONTROL MÜHENDİSLİĞİ BÖLÜMÜ KON 111 FİNAL RAPORU ÖDEV KONUSU : ROBOTİKTE KULLANILAN HAREKETLENDİRİCİ TAKIM ADI : TAKIM 27 TÜRLERİ VE UYGULAMA
T.C İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ KONTROL MÜHENDİSLİĞİ BÖLÜMÜ KON 111 FİNAL RAPORU ÖDEV KONUSU : ROBOTİKTE KULLANILAN HAREKETLENDİRİCİ TAKIM ADI : TAKIM 27 TÜRLERİ VE UYGULAMA
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1. HAFTA 1 İçindekiler Elektrik Makinalarına Giriş Elektrik Makinalarının
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1. HAFTA 1 İçindekiler Elektrik Makinalarına Giriş Elektrik Makinalarının
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Deney 2: Flip-Floplar
 Deney 2: Flip-Floplar Bu deneyde, çeşitli flip-flop devreleri kurulacak ve incelenecektir. Kullanılan Elemanlar 1 x 74HC00 (NAND kapısı) 1 x 74HC73 (JK flip-flop) 1 x 74HC74 (D flip-flop) 4 x 4,7 kohm
Deney 2: Flip-Floplar Bu deneyde, çeşitli flip-flop devreleri kurulacak ve incelenecektir. Kullanılan Elemanlar 1 x 74HC00 (NAND kapısı) 1 x 74HC73 (JK flip-flop) 1 x 74HC74 (D flip-flop) 4 x 4,7 kohm
MA İNAL NA ARI A NDA ELE E K LE TRİK
 3.0.01 KALDIRMA MAKİNALARINDA ELEKTRİK DONANIMI VE ELEKTRİK MOTORU SEÇİMİ Günümüzde transport makinalarının bir çoğunda güç sistemi olarak elektrik tahrikli donanımlar kullanılmaktadır. 1 ELEKTRİK TAHRİKİNİN
3.0.01 KALDIRMA MAKİNALARINDA ELEKTRİK DONANIMI VE ELEKTRİK MOTORU SEÇİMİ Günümüzde transport makinalarının bir çoğunda güç sistemi olarak elektrik tahrikli donanımlar kullanılmaktadır. 1 ELEKTRİK TAHRİKİNİN
1. Sayıcıların çalışma prensiplerini ve JK flip-floplarla nasıl gerçekleştirileceğini anlamak. 2. Asenkron ve senkron sayıcıları incelemek.
 DENEY 7-2 Sayıcılar DENEYİN AMACI 1. Sayıcıların çalışma prensiplerini ve JK flip-floplarla nasıl gerçekleştirileceğini anlamak. 2. Asenkron ve senkron sayıcıları incelemek. GENEL BİLGİLER Sayıcılar, flip-floplar
DENEY 7-2 Sayıcılar DENEYİN AMACI 1. Sayıcıların çalışma prensiplerini ve JK flip-floplarla nasıl gerçekleştirileceğini anlamak. 2. Asenkron ve senkron sayıcıları incelemek. GENEL BİLGİLER Sayıcılar, flip-floplar
TAKIM TEZGAHLARI MAK 4462 SUNUM Bu sunumun hazırlanmasında ulusal ve uluslararası çeşitli yayınlardan faydalanılmıştır
 TAKIM TEZGAHLARI MAK 4462 SUNUM 4 Bu sunumun hazırlanmasında ulusal ve uluslararası çeşitli yayınlardan faydalanılmıştır 1 Kademesiz devir mekanizmaları Devir sayılarının kademesiz olarak ayarlanmasıyla;..,..,..,,.
TAKIM TEZGAHLARI MAK 4462 SUNUM 4 Bu sunumun hazırlanmasında ulusal ve uluslararası çeşitli yayınlardan faydalanılmıştır 1 Kademesiz devir mekanizmaları Devir sayılarının kademesiz olarak ayarlanmasıyla;..,..,..,,.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Deney 3: Asenkron Sayıcılar
 Deney 3: Asenkron Sayıcılar Sayıcılar hakkında genel bilgi sahibi olunması, asenkron sayıcıların kurulması ve incelenmesi Kullanılan Elemanlar 1xLM555 Entegresi, 1x10 kohm direnç, 1x100 kohm direnç, 1x10
Deney 3: Asenkron Sayıcılar Sayıcılar hakkında genel bilgi sahibi olunması, asenkron sayıcıların kurulması ve incelenmesi Kullanılan Elemanlar 1xLM555 Entegresi, 1x10 kohm direnç, 1x100 kohm direnç, 1x10
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
Teorik Bilgi DENEY 7: ASENKRON VE SENKRON SAYICILAR
 DENEY 7: ASENKRON VE SENKRON SAYICILAR Deneyin Amaçları Asenkron ve senkron sayıcı devre yapılarının öğrenilmesi ve deneysel olarak yapılması Deney Malzemeleri 74LS08 Ve Kapı Entegresi (1 Adet) 74LS76
DENEY 7: ASENKRON VE SENKRON SAYICILAR Deneyin Amaçları Asenkron ve senkron sayıcı devre yapılarının öğrenilmesi ve deneysel olarak yapılması Deney Malzemeleri 74LS08 Ve Kapı Entegresi (1 Adet) 74LS76
DANIŞMAN Mustafa TURAN. HAZIRLAYAN İbrahim Bahadır BAŞYİĞİT T.C. SAKARYA ÜNİVERSİTESİ HERHANGİ BİR ELEKTRİKLİ CİHAZIN ÇALIŞMA PRENSİBİ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ HERHANGİ BİR ELEKTRİKLİ CİHAZIN ÇALIŞMA PRENSİBİ DANIŞMAN Mustafa TURAN HAZIRLAYAN İbrahim Bahadır BAŞYİĞİT 0101.00001
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ HERHANGİ BİR ELEKTRİKLİ CİHAZIN ÇALIŞMA PRENSİBİ DANIŞMAN Mustafa TURAN HAZIRLAYAN İbrahim Bahadır BAŞYİĞİT 0101.00001
DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ YAYINLARI NO: 293 3. BASKI
 DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ YAYINLARI NO: 293 3. BASKI ÖNSÖZ Bu kitap, Dokuz Eylül Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümünde lisans eğitimi ders programında verilen
DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ YAYINLARI NO: 293 3. BASKI ÖNSÖZ Bu kitap, Dokuz Eylül Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümünde lisans eğitimi ders programında verilen
SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ
 SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ Fan yükleri, uygulama ihtiyaçları ve bu uygulamayı motor hız kontrol cihazları ile çözerken, uygulamanın özel ihtiyaçlarının neler olabileceğine daha yakından
SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ Fan yükleri, uygulama ihtiyaçları ve bu uygulamayı motor hız kontrol cihazları ile çözerken, uygulamanın özel ihtiyaçlarının neler olabileceğine daha yakından
DENEY 4 DC ŞÖNT ve SERİ MOTORUN YÜKLEME KARAKTERİSTİKLERİ
 DENEY 4 DC ŞÖNT ve SERİ MOTORUN YÜKLEME KARAKTERİSTİKLERİ 1. Temel Teori (Şönt Uyarmalı Motor) DC şönt motorlar hızdaki iyi kararlılıkları dolayısıyla yaygın kullanılan motorlardır. Bu motor tipi seri
DENEY 4 DC ŞÖNT ve SERİ MOTORUN YÜKLEME KARAKTERİSTİKLERİ 1. Temel Teori (Şönt Uyarmalı Motor) DC şönt motorlar hızdaki iyi kararlılıkları dolayısıyla yaygın kullanılan motorlardır. Bu motor tipi seri
T.C. KOCAELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİŞİM SİSTEMLERİ MÜHENDİSLİĞİ
 T.C. KOCAELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİŞİM SİSTEMLERİ MÜHENDİSLİĞİ 1 7. HAFTA Flip-Floplar RS Flip Flop, Tetiklemeli RS Flip Flop, JK Flip Flop, D Tipi Flip Flop, T Tipi Flip Flop Tetikleme
T.C. KOCAELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİŞİM SİSTEMLERİ MÜHENDİSLİĞİ 1 7. HAFTA Flip-Floplar RS Flip Flop, Tetiklemeli RS Flip Flop, JK Flip Flop, D Tipi Flip Flop, T Tipi Flip Flop Tetikleme
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
2- Tristör ile yük akımı değiştirilerek ayarlı yükkontrolü yapılabilir.
 Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
DOĞRU AKIM GENERATÖRLERİ VE KARAKTERİSTİKLERİ
 1 DOĞRU AKIM GENERATÖRLERİ VE KARAKTERİSTİKLERİ DOĞRU AKIM GENERATÖRLERİ Tanımlar Doğru akım makinelerinin kutupları sabit veya elektromıknatıslı olmaktadır. Sabit mıknatıslar küçük güçlü generatörlerde
1 DOĞRU AKIM GENERATÖRLERİ VE KARAKTERİSTİKLERİ DOĞRU AKIM GENERATÖRLERİ Tanımlar Doğru akım makinelerinin kutupları sabit veya elektromıknatıslı olmaktadır. Sabit mıknatıslar küçük güçlü generatörlerde
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1
 Yazar: Yrd. Doç. Dr. Mustafa Turan S1") ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 10. HAFTA 1 İçindekiler Doğru Akım Generatörleri 2 Doğru akım makinelerinin
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 10. HAFTA 1 İçindekiler Doğru Akım Generatörleri 2 Doğru akım makinelerinin
DENEY 8- Flip Flop ve Uygulamaları. Amaç: - Flip Flop çalışma mantığını kavramak
 DENEY 8- Flip Flop ve Uygulamaları Amaç: - Flip Flop çalışma mantığını kavramak Deneyin Yapılışı: - Deney bağlantı şemasında verilen devreleri uygun elemanlarla kurunuz. Entegrenin besleme ve GND bağlantılarını
DENEY 8- Flip Flop ve Uygulamaları Amaç: - Flip Flop çalışma mantığını kavramak Deneyin Yapılışı: - Deney bağlantı şemasında verilen devreleri uygun elemanlarla kurunuz. Entegrenin besleme ve GND bağlantılarını
İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ
 ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
ASENKRON MOTORLARA YOL VERME METODLARI
 DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
Bu deney çalışmasında kombinasyonel lojik devrelerden decoder incelenecektir.
 4.1 Ön Çalışması Deney çalışmasında yapılacak uygulamaların benzetimlerini yaparak, sonuçlarını ön çalışma raporu olarak hazırlayınız. 4.2 Deneyin Amacı MSI lojik elemanları yardımıyla kombinasyonel lojik
4.1 Ön Çalışması Deney çalışmasında yapılacak uygulamaların benzetimlerini yaparak, sonuçlarını ön çalışma raporu olarak hazırlayınız. 4.2 Deneyin Amacı MSI lojik elemanları yardımıyla kombinasyonel lojik
22. ÜNİTE SENKRON MOTORLAR
 22. ÜNİTE SENKRON MOTORLAR KONULAR 1. YAPISI VE ÇALIŞMA PRENSİBİ 2. YOL VERME YÖNTEMLERİ 3. KULLANILDIĞI YERLER Herhangi bir yükü beslemekte olan ve birbirine paralel bağlanan iki altematörden birsinin
22. ÜNİTE SENKRON MOTORLAR KONULAR 1. YAPISI VE ÇALIŞMA PRENSİBİ 2. YOL VERME YÖNTEMLERİ 3. KULLANILDIĞI YERLER Herhangi bir yükü beslemekte olan ve birbirine paralel bağlanan iki altematörden birsinin
Elektromekanik Kumanda Sistemleri / Ders Notları
 İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
Yüksek verimli ısıtma pompası. Rio-Eco N / Rio-Eco Z N. Tip Kitapçığı
 Yüksek verimli ısıtma pompası Rio-Eco N / Rio-Eco Z N Tip Kitapçığı Baskı Tip Kitapçığı Rio-Eco N / Rio-Eco Z N Tüm hakları saklıdır. Bu kitabın içeriği üreticinin izni olmadan dağıtılamaz, çoğaltılamaz,
Yüksek verimli ısıtma pompası Rio-Eco N / Rio-Eco Z N Tip Kitapçığı Baskı Tip Kitapçığı Rio-Eco N / Rio-Eco Z N Tüm hakları saklıdır. Bu kitabın içeriği üreticinin izni olmadan dağıtılamaz, çoğaltılamaz,
ELK2016 SAYISAL TASARIM DERSİ LABORATUVARI DENEY NO: 4 DENEYİN ADI: JK, RS, T VE D TİPİ FLİP-FLOPLARIN İNCELENMESİ
 ELK2016 SAYISAL TASARIM DERSİ LABORATUVARI DENEY NO: 4 DENEYİN ADI: JK, RS, T VE D TİPİ FLİP-FLOPLARIN İNCELENMESİ Açıklamalar: Bu deneyde JK, RS, T ve D tipi flip-flop (FF) lar incelenecektir. Deney içerisinde
ELK2016 SAYISAL TASARIM DERSİ LABORATUVARI DENEY NO: 4 DENEYİN ADI: JK, RS, T VE D TİPİ FLİP-FLOPLARIN İNCELENMESİ Açıklamalar: Bu deneyde JK, RS, T ve D tipi flip-flop (FF) lar incelenecektir. Deney içerisinde
Bölüm 7 Ardışıl Lojik Devreler
 Bölüm 7 Ardışıl Lojik Devreler DENEY 7- Flip-Floplar DENEYİN AMACI. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop türlerinin
Bölüm 7 Ardışıl Lojik Devreler DENEY 7- Flip-Floplar DENEYİN AMACI. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop türlerinin
Eleco 2014 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, Kasım 2014, Bursa
 Eleco 214 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 214, Bursa Davlumbazlarda Kullanılan Tek Fazlı Sürekli Kondansatörlü Asenkron Motor Analizi Analysis of a Permanent
Eleco 214 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 214, Bursa Davlumbazlarda Kullanılan Tek Fazlı Sürekli Kondansatörlü Asenkron Motor Analizi Analysis of a Permanent
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
ELEKTRİK MOTORLARINDA VE UYGULAMALARINDA ENERJİ VERİMLİLİĞİ. Fatih BODUR
 ELEKTRİK MOTORLARINDA VE UYGULAMALARINDA ENERJİ VERİMLİLİĞİ Fatih BODUR Elektrik Motorları : Dönme kuvveti üreten makineler Elektrik motorunun amacı: Motor şaftına Dönme Momenti (T) ve Devir (n) sağlaması,iş
ELEKTRİK MOTORLARINDA VE UYGULAMALARINDA ENERJİ VERİMLİLİĞİ Fatih BODUR Elektrik Motorları : Dönme kuvveti üreten makineler Elektrik motorunun amacı: Motor şaftına Dönme Momenti (T) ve Devir (n) sağlaması,iş
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
BÖLÜM 6 DC Kompunt Motor Testleri
 BÖLÜM 6 DC Kompunt Motor Testleri 6-1 DENEY 6-1 Düz Kompunt Motorun Bağlantı ve Motor Yönü Kontrolü AMAÇ Testler tamamlandıktan sonra DC Düz kompunt motorun bağlantısı ve motorun devir yönü kontrolü konusunda
BÖLÜM 6 DC Kompunt Motor Testleri 6-1 DENEY 6-1 Düz Kompunt Motorun Bağlantı ve Motor Yönü Kontrolü AMAÇ Testler tamamlandıktan sonra DC Düz kompunt motorun bağlantısı ve motorun devir yönü kontrolü konusunda
ALTERNATİF AKIMIN TEMEL ESASLARI
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
SAYISAL DEVRELERE GİRİŞ ANALOG VE SAYISAL KAVRAMLARI (ANALOG AND DIGITAL) Sakarya Üniversitesi
 Sakarya Üniversitesi") SAYISAL DEVRELERE GİRİŞ ANALOG VE SAYISAL KAVRAMLARI (ANALOG AND DIGITAL) Sakarya Üniversitesi DERS İÇERİĞİ Analog Büyüklük, Analog İşaret, Analog Gösterge ve Analog Sistem Sayısal Büyüklük, Sayısal İşaret,
SAYISAL DEVRELERE GİRİŞ ANALOG VE SAYISAL KAVRAMLARI (ANALOG AND DIGITAL) Sakarya Üniversitesi DERS İÇERİĞİ Analog Büyüklük, Analog İşaret, Analog Gösterge ve Analog Sistem Sayısal Büyüklük, Sayısal İşaret,
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ TEK ABONELİ MOTORLU UYDU ANTEN TESİSATI ANKARA 2007 Milli Eğitim Bakanlığı
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ TEK ABONELİ MOTORLU UYDU ANTEN TESİSATI ANKARA 2007 Milli Eğitim Bakanlığı
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 7. Hafta Aktüatörler Aktüatör nedir? Aktüatöre neden ihtiyaç duyulur? Aktüatör Türleri Hidrolik-Pnömatik Aktüatörler Elektrikli Aktüatörler Bu Haftanın Konu Başlıkları SAÜ - Sakarya
Mekatroniğe Giriş Dersi 7. Hafta Aktüatörler Aktüatör nedir? Aktüatöre neden ihtiyaç duyulur? Aktüatör Türleri Hidrolik-Pnömatik Aktüatörler Elektrikli Aktüatörler Bu Haftanın Konu Başlıkları SAÜ - Sakarya
Temel Flip-Flop ve Saklayıcı Yapıları. Mikroişlemciler ve Mikrobilgisayarlar
 Temel Flip-Flop ve Saklayıcı Yapıları 1 Sayısal alga Şekilleri 1 2 4 3 1. Yükselme Zamanı 2. Alçalma Zamanı 3. Sinyal Genişliği 4. Genlik (Amplitude) 2 Periot (T) : Tekrar eden bir sinyalin arka arkaya
Temel Flip-Flop ve Saklayıcı Yapıları 1 Sayısal alga Şekilleri 1 2 4 3 1. Yükselme Zamanı 2. Alçalma Zamanı 3. Sinyal Genişliği 4. Genlik (Amplitude) 2 Periot (T) : Tekrar eden bir sinyalin arka arkaya
1. BİR FAZLI ASENKRON MOTORLAR
 1. BİR FAZLI ASENKRON MOTORLAR Bir fazlı yardımcı sargılı motorlar Üniversal motorlar 1.1. Bir fazlı yardımcı sargılı motorlar 1.1.3. Yardımcı Sargıyı Devreden Ayırma Nedenleri Motorun ilk kalkınması anında
1. BİR FAZLI ASENKRON MOTORLAR Bir fazlı yardımcı sargılı motorlar Üniversal motorlar 1.1. Bir fazlı yardımcı sargılı motorlar 1.1.3. Yardımcı Sargıyı Devreden Ayırma Nedenleri Motorun ilk kalkınması anında
3. Bölüm: Asenkron Motorlar. Doç. Dr. Ersan KABALCI
 3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
Başlıca ANALİZ TİPLERİ. ve Özellikleri
 Başlıca ANALİZ TİPLERİ ve Özellikleri 1- Yapısal Analizler :Katı cisimlerden oluşan sistemlerde, Dış yapısal yüklerin (kuvvet, tork, basınç vb.) etkisini inceleyen analizlerdir. 1.1 Statik Yapısal Analizler
Başlıca ANALİZ TİPLERİ ve Özellikleri 1- Yapısal Analizler :Katı cisimlerden oluşan sistemlerde, Dış yapısal yüklerin (kuvvet, tork, basınç vb.) etkisini inceleyen analizlerdir. 1.1 Statik Yapısal Analizler
ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ
 1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
Adres bilgileri ve diğer bilgilerin bazıları
 Adres bilgileri ve diğer bilgilerin bazıları G şifreleri (kodları) CNC programlarının yazımında kullanılan talaş kaldırma işlemlerini doğrudan ilgilendiren kodlardır. G kod numaraları G00 - G99 arasındadır.
Adres bilgileri ve diğer bilgilerin bazıları G şifreleri (kodları) CNC programlarının yazımında kullanılan talaş kaldırma işlemlerini doğrudan ilgilendiren kodlardır. G kod numaraları G00 - G99 arasındadır.
ÜÇ-FAZ SENKRON JENERATÖRÜN AÇIK DEVRE VE KISA DEVRE KARAKTERİSTİKLERİ DENEY 324-04
 ĐNÖNÜ ÜNĐERSĐTESĐ MÜHENDĐSĐK FAKÜTESĐ EEKTRĐK-EEKTRONĐK MÜH. BÖ. ÜÇ-FAZ SENKRON JENERATÖRÜN AÇIK DERE E KISA DERE KARAKTERİSTİKERİ DENEY 4-04. AMAÇ: Senkron jeneratör olarak çalışan üç faz senkron makinanın
ĐNÖNÜ ÜNĐERSĐTESĐ MÜHENDĐSĐK FAKÜTESĐ EEKTRĐK-EEKTRONĐK MÜH. BÖ. ÜÇ-FAZ SENKRON JENERATÖRÜN AÇIK DERE E KISA DERE KARAKTERİSTİKERİ DENEY 4-04. AMAÇ: Senkron jeneratör olarak çalışan üç faz senkron makinanın
Asenkron Makineler (2/3)
") Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3