5.28. UÇAKSAVAR PROJESİ
|
|
|
- Berk Güven
- 8 yıl önce
- İzleme sayısı:
Transkript
1 5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin hava saldırılarından korunması için belli bir hava sahası tüm dünya ülkelerine bildirilerek uçuşa yasaklanır. Bu sahanın içinde uçuş yapan uçakların alan ihlalinden dolayı düşürülmesinde kullanılan makinelerden biri de uçaksavarlardır. Uçağı saptadığında ateş eden ve düşürülmesini sağlayan bir uçaksavar sisteminin benzetimi, küçük boyutlardaki lego parçalarının bir araya getirilmesi ile yapılmıştır. 180 'lik tarama açısıyla gökyüzünün sadece iki boyutu için tarama yaptırılması planlanmış ve bu taranan alana giren uçakların saptanması halinde, uçaksavar ateşleme sistemi devreye girerek uçağın düşürülmesi tasarlanmıştır. Radar sinyali olarak ışık gönderilmekte ve uçak gövdesi olarak düşünülen parlak cisimden ışık yansıması algılandığı an silah ateşlenmektedir. Ateşlemeden sonra tarama yapmaya devam edilmektedir. Ateşleme benzetimi için de yine ışık gönderilmektedir. 1. Malzeme Seçimi Bu proje için radar sinyal üreteci ve silahı temsil amacıyla iki adet lamba seçilmiştir. Uçaktan yansıyacak radar sinyallerini yakalayacak dedektörü temsil için de bir LDR seçilmiştir. Projenin 180 'lik bir açısal sahanın tarama sınırlaması için iki adet anahtar kullanılmıştır. Taramada gereken döner taban hareketini verebilmek için robot seti içerisinde bulunan 1907

2 daha güçlü bir motor seçilmiştir. Montajda kullanılan diğer yapısal malzemeler Montaj Malzemeleri bölümünde belirtilmiştir Eleman Adlandırılması ve Fonksiyonları Bu montajda kullanılan motor ve anahtarların adları ve ne amaçla kullanıldıkları aşağıda verilmiştir. Adı Malzeme Fonksiyonu M1 Motor Radarın 180 tarama hareketini sağlamak M2 Lamba Radar sinyallerini üretmek ve semaya yollamak M3 Lamba Uçağın tespitinden sonra düşürecek olan silah E1 LDR Uçaktan yansıyan sinyalli yakalayan dedektör E2 Anahtar Radarın 180 tarama sol sınırını algılama E3 Anahtar Radarın 180 tarama sağ sınırını algılama 1.3. Sistemin Çalışması M1 motoruna E2 ve E3 anahtarlarının pasif oldukları süre içerisinde yine E2 ve E3 anahtarlarının sınırladığı bölgede sağa ve sola sürekli olarak tarama hareketi yaptırılmaktadır. M2 lambası parlak bir cismin üzerine ışık düşürmek için kullanılmıştır. M3 lambası ise parlak bir cismin tespiti anında ateşlemeyi temsil etmektedir. M1 motorunun sola dönüşünü durdurup sağa dönüşünü sağlamak için E2 anahtarından yararlanılmıştır. M1 motorunun 1908

3 sağa dönüşünü istenilen konuma ulaştığı zaman kesip sola dönüşünü sağlamak için de E3 anahtarından yararlanılmıştır. E1 anahtarı ise M2 lambası ile gönderilen ışığın bir parlak cisimden yansımasını yakalamakta kullanılmıştır Yerleşim Planı Uçaksavar makinesi için montajı gerçekleştirilen sisteme ait yerleşim planı aşağıda verilmiştir Fiziksel Tanımlama HAREKET MOTOR ANAHTAR Sola tarama M1 E2 Sağa tarama M1 E3 Radar sinyali gönderme M2 Radar sinyali yakalama E1 Silah ateşleme M3 1909

4 2. ÇALIŞMANIN AKIŞ ŞEMASI UÇAKSAVAR SETİN KULLANIM İMKANLARININ ANALİZİ KONTROL VE HAREKET İÇİN ELEMANLARIN TESPİTİ ELEMANLARIN ADLANDIRILMASI ELEMANLARIN FİZİKİ TANIMI YERLEŞİM PLANI GEREKLİ MALZEME TESPİTİ ADIM ADIM MONTAJ ADIM ADIM PROJE YAZILIMININ KODLANMASI 1910

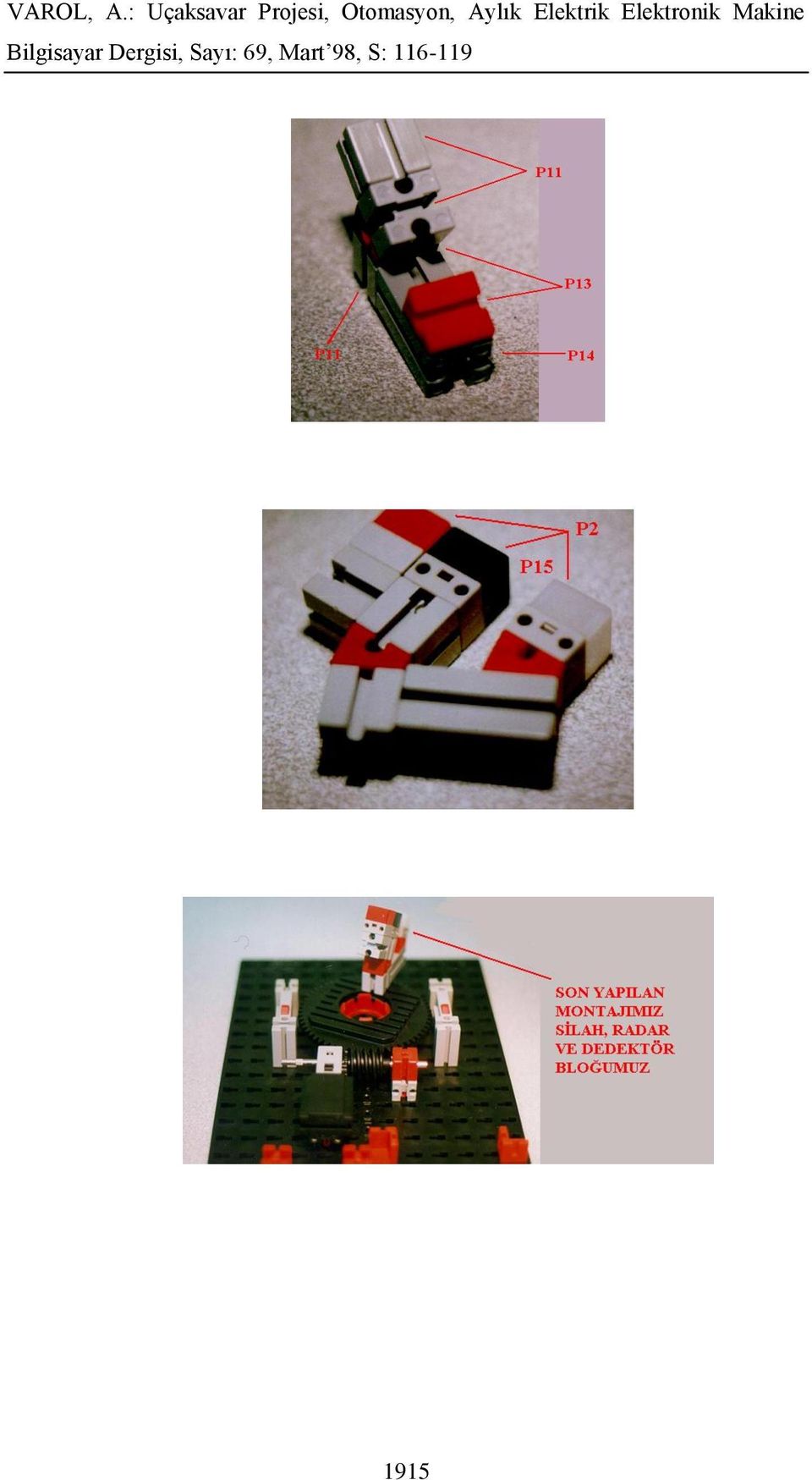
5 3. Malzeme Listesi P1 : 5mm' lik yapı bloğu P2 : Lamba, LDR ile alt soketler ve üst kapakları P3 : Mikro anahtar P4 : Motor P5 : Döner tabla P8 : Kama P6 : Soket kutusu 1911

6 P7 : Ara birim P9 : Açısal yapı bloğu P10 : Panel kapağı P11 : 15mm' lik yapı bloğu P12 : Kasnak desteği P13 : 15º' lik açısal yapı bloğu P14 : 30mm' lik yapı bloğu 1912

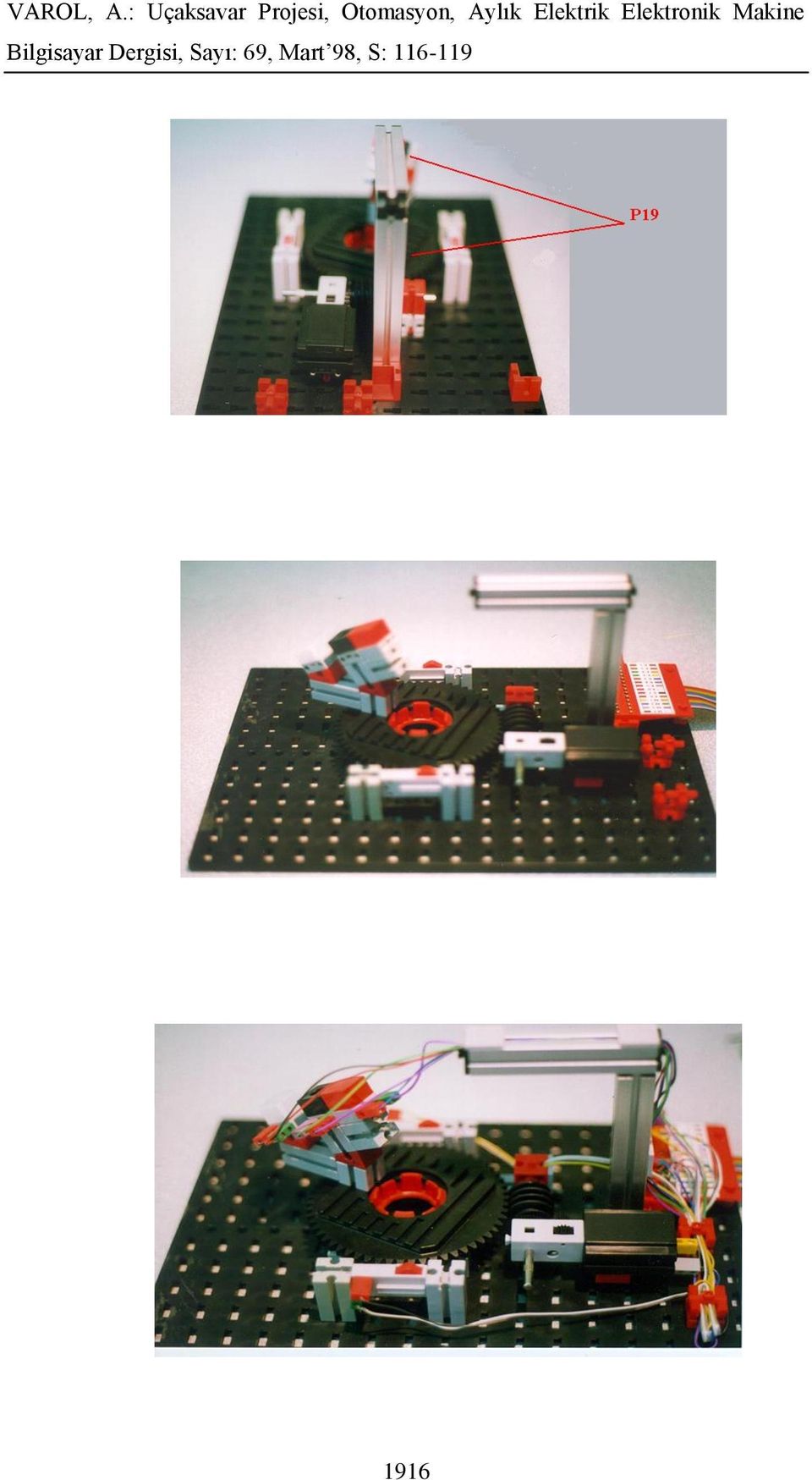
7 P15: Montajı tamamlanmış LDR bloğu P16 : Eksenli U tipi redüktör P17 : 75mm' lik Alüminyum çubuk P18: Fişlerinin bağlantı kabloları ile montajı P19 : 90mm' lik alüminyum çubuk 1913

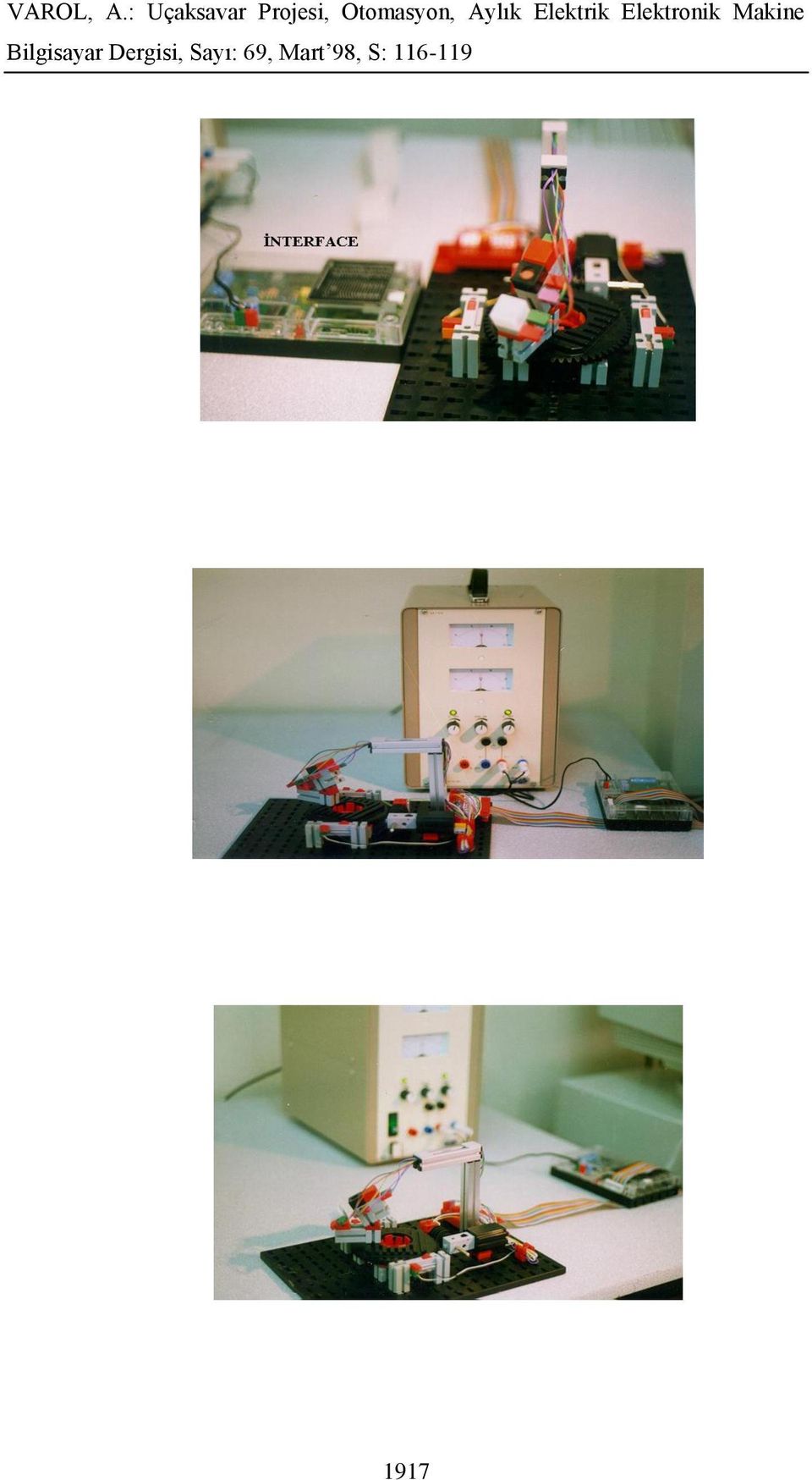
8 4. Montaj Uçaksavar sisteminin montaj safhaları aşağıda, sırası ile verilmiştir. ANA KART 1914

9 1915
10 1916
11 1917
12 yapılacaktır. 5. Program Yazılımı ve Açıklaması Program yazılımını parçalar halinde işlerken, satır satır açıklaması 1 TO STARTUP 2 MCW "M2 3 SOL 4 SAG 5 STARTUP 6 END Bu program parçasının birinci satırında TO komutundan sonra bir isim vermek gerekir. Bu parçanın ismi STARTUP olarak verilmiştir. İkinci satırda lambaların yanmasını sağlayan M2 motoru devreye alınmaktadır. Üçüncü satırda ileride açıklanacak olan sola dönüş alt programına dallandırılma yapılmaktadır. SOL alt programın okunmasından sonra, geri 1918

13 dönerek dördüncü satır okunur. Dördüncü satırda ise SAG olarak adlandırdığımız ikinci alt programa gidilmektedir. Bu alt programın okunmasından sonra beşinci satırda ana program bitirilmeden kısa döngü olarak tekrar okutularak programın sürekli çalıştırılması sağlanmıştır. 1 TO SOL 2 MCW "M1 3 IF EQUALP STATUS "E1 1 [ MCW "M3] 4 MSTOP "M3 5 IF EQUALP STATUS "E2 0 [ SOL ] 6 END Bu program parçası alt program olarak yazılıp işlevi gereği birinci satırda SOL olarak adlandırılmıştır. İkinci satırda sola dönüş için MCW komutu M1 motoru ile kullanılmıştır. MCW (Motor Clock Wise) motoru saat ibresi yönünde çevirmektedir. Ancak motoru besleyen kabloların uçları değiştirildiğinde, dönme işlemi ters yönde olmaktadır. Bu nedenle borada sola dönüş için MCW ifadesi kullanılmıştır. Üçüncü satırda E1 olarak adlandırılan LDR elemanın uçağı yakaladığı zaman çıktısı (statüsü) Bir ( 'e eşit ise) olduğu zaman M3 olarak adlandırılan silahın ateşlenmesi sağlanmaktadır. Dördüncü satırda M3 lambası söndürülür. Şart sağlanmasa dahi dördüncü satır işlenir ve bunun işlenmesi programın tasarımına aykırı düşmez. Beşinci satırda E2 anahtarının statüsü Sıfır'a eşit ise SOL alt programına dallan anlamını taşır. Eğer son şart sağlanmaz ise alt program 1919
![1 TO SOL 2 MCW "M1 3 IF EQUALP STATUS "E1 1 [ MCW "M3] 4 MSTOP "M3 5 IF EQUALP STATUS "E2 0 [ SOL ] 6 END Bu program parçası alt program olarak yazılıp işlevi gereği birinci satırda SOL olarak](/docs-images/46/15796400/images/page_13.jpg "adlandırılmıştır. İkinci satırda sola dönüş için MCW komutu M1 motoru ile kullanılmıştır. MCW (Motor Clock Wise) motoru saat ibresi yönünde çevirmektedir.")
14 işlenmesi bitirilip STARTUP ana programında SOL komut satırının bir alt satırını okuyarak devam eder. 1 TO SAG 2 MCCW "M1 3 IF EQUALP STATUS "E1 1 [ MCW "M3 ] 4 MSTOP "M3 5 IF EQUALP STATUS "E3 0 [ SAG ] 6 END Bu program parçası alt program olarak yazılıp işlevi gereği birinci satırda SAG olarak adlandırılmıştır. İkinci satırda sağa dönüş için MCCW komutu (Motorun uçları ters bağlanmış) M1 motoru ile kullanılmıştır. Üçüncü satırda E1 olarak adlandırılan LDR elemanın uçağı yakaladığı zaman çıktısı (statüsü) Bir (' e eşit ise) olduğu zaman M3 olarak adlandırılan silahın ateşlenmesi sağlanmaktadır. Dördüncü satırda M3 lambası söndürülmektedir. Şart sağlanmazsa dördüncü satır işlenir ve işlenmesi programın tasarımına aykırı düşmez. Beşinci satırda E3 anahtarının statüsü Sıfır'a eşit ise SAG alt programına dallan anlamına göre yazılmıştır. Eğer son şart sağlanmaz ise, alt program işlenmesi bitirilip STARTUP ana programında SAG komut satırının bir alt satırını okuyarak devam eder. 6. Sonuç Üniversitelerin ilgili bölümlerinde benzetim projeleri yaptırılarak, öğrencilerin bir projeyi tasarımından alıp montajını ve daha sonra da kontrolünü nasıl yapması gerektiği basitçe öğretilebilir. Eğitim robotlarının 1920
 Bir (' e eşit ise) olduğu zaman M3 olarak adlandırılan silahın ateşlenmesi sağlanmaktadır.")
15 özelliği; lego parçalarından oluşması, esnek yapıya sahip olmaları ve tasarlanan projelere basitçe uyarlanabilmesidir. En önemli tarafları arasında; fiyatlarının düşük olması, iş güvenliği açısından risk taşımamaları ve defalarca sökülüp takılmaları sayılabilir. 7. Kaynaklar [1] Uçuşa Kapalı Bölgeler İçin Uçağın Tespiti ve Düşürülmesi Projesi, F.Ü. Teknik Eğitim Fakültesi, Elektronik-Bilgisayar Eğitimi Bölümü, Robotik Dersi Projesi, I/

5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ
 5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU. Engin AVCI enginavci@firat.edu.tr
 5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ
 5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.15. VİNÇ BENZETİM PROJESİ
 5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ
 5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
Varol, A.: Otomatik Pres Makinası, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 74, Ağustos 98, S: 98-101
 5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.13. SONDAJ MAKİNESİ PROJESİ
 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU
 5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ
 5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.41. UYDU ANTENİ YÖNLENDİRME OTOMASYON PROJESİ
 5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.40. SPREY DOLDURMA OTOMASYONU
 5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU
 5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU
 TEZGAHI OTOMASYONU") 5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI
 5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ
 5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU
 5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU
 5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ
 5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.33. OTOMATİK PARÇA DELME OTOMASYONU
 5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ
 5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ
 5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
VAROL, A.: Koli İstifleme Otomasyonu, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 107, Mayıs 2001, S: 114-119
 5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.17. ARICILIK BENZETİM PROJESİ
 5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU
 5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.36. FINDIK SAVURMA OTOMASYONU
 5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.48. KALİTE KONTROL OTOMASYONU
 5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ
 5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU
 5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU
 5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.1. OTOBAN GEÇİŞ SİSTEMİ
 5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU
 5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU
 5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.51. SERAMİK PAKETLEME OTOMASYONU
 5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.9. OTOMATİK MEYVE SOYMA VE DİLİMLEME MAKİNASI
 5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI
 5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.46. EBAT KONTROL OTOMASYONU
 5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU
 5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU
 5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU
 5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU
 5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU. Abdulkadir ġengür
 5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.43. CAM TUĞLA BOYAMA OTOMASYONU
 5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU
 5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU
 5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
Varol, A., Şengür, A., Avcı, E.: Atık Toplayan Araç Otomasyonu, Otomasyon, Sayı 154, 2005(03), Mart 2005.
, Mart 2005.") 2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
ERA 02... GAZ YAKICILAR İÇİN KONTROL RÖLESİ
 ERA 02... GAZ YAKICILAR İÇİN KONTROL RÖLESİ 02... Serisi Gaz yakma ve kontrol röleleri; pilot ateşlemeli yada iki kademeli gaz bekleri için 24 saat içersinde en az bir defa otomatik yapan, veya elle durdurulan
ERA 02... GAZ YAKICILAR İÇİN KONTROL RÖLESİ 02... Serisi Gaz yakma ve kontrol röleleri; pilot ateşlemeli yada iki kademeli gaz bekleri için 24 saat içersinde en az bir defa otomatik yapan, veya elle durdurulan
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS
 4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI
 5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU
 5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
Merkezi elektrik ünitesi. Merkezi elektrik ünitesi
 yolcu tarafında, gösterge panelindeki eşya gözünün altında bulunur. Aşağıdaki şekilde açın: 1. Gösterge panelindeki eşya gözünün kapağını açın. Kapak yolcu koltuğunun ön kısmında yer alır. 2. Lastik döşemeyi
yolcu tarafında, gösterge panelindeki eşya gözünün altında bulunur. Aşağıdaki şekilde açın: 1. Gösterge panelindeki eşya gözünün kapağını açın. Kapak yolcu koltuğunun ön kısmında yer alır. 2. Lastik döşemeyi
5.3. ROBOTLAR VE ISI KONTROLÜ
 5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
SONUÇ RAPORU EK: Ürüne CLEVER adı verilmiştir. Geliştirilen model C15 olarak tanımlanmıştır.
 SONUÇ RAPORU EK: İŞ FİKRİ ÇIKTISI HAKKINDA BİLGİLER ve TEKNİK DETAYLAR (Bu bölümde çıkan ürüne ait teknik resim, prototip fotoğrafları, uygulama şekilleri, eğer ürün piyasaya sunulmuşsa teknik özellikleri-kapasitesi,
SONUÇ RAPORU EK: İŞ FİKRİ ÇIKTISI HAKKINDA BİLGİLER ve TEKNİK DETAYLAR (Bu bölümde çıkan ürüne ait teknik resim, prototip fotoğrafları, uygulama şekilleri, eğer ürün piyasaya sunulmuşsa teknik özellikleri-kapasitesi,
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür ksengur@firat.edu.tr
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU. Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ
 4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:avarol@firat.edu.tr 2 e posta:ferhatb@firat.edu.tr
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:avarol@firat.edu.tr 2 e posta:ferhatb@firat.edu.tr
GAZ BRÜLÖRLERİ İÇİN KONTROL ÜNİTESİ
 GAZ BRÜLÖRLERİ İÇİN KONTROL ÜNİTESİ ( Kesintili çalışma ) 02C.1 Uygulama : 02C1 Kontrol ünitesi, tek veya çift kademeli proses brülörlerinde alev denetimi için tasarlanmıştır. 24 saat içinde en az bir
GAZ BRÜLÖRLERİ İÇİN KONTROL ÜNİTESİ ( Kesintili çalışma ) 02C.1 Uygulama : 02C1 Kontrol ünitesi, tek veya çift kademeli proses brülörlerinde alev denetimi için tasarlanmıştır. 24 saat içinde en az bir
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ESNEK İMALAT SİSTEMLERİ DERS NOTLARI 2 Arş. Gör.
 Bir üretim hattında genel anlamda şu görevler (task) yürütülür: İş parçaları depo alanlarından alınarak işleme makine araçlarına gönderilir. Robotlar konveyör hattından iş parçalarını alarak istasyonda
Bir üretim hattında genel anlamda şu görevler (task) yürütülür: İş parçaları depo alanlarından alınarak işleme makine araçlarına gönderilir. Robotlar konveyör hattından iş parçalarını alarak istasyonda
çindekiler Kaedra Sistem
 çindekiler Kaedra Sistem...86 Sunum...86 Kombinasyon kutuları...89 Modüler cihazlar için arayüzlü da ıtım kutuları...90 Geniflletme kutuları...90 Modüler cihazlar için da ıtım kutuları...91 Modüler olmayan
çindekiler Kaedra Sistem...86 Sunum...86 Kombinasyon kutuları...89 Modüler cihazlar için arayüzlü da ıtım kutuları...90 Geniflletme kutuları...90 Modüler cihazlar için da ıtım kutuları...91 Modüler olmayan
İÇİNDEKİLER. 1- Alan Tarama Sistemleri... 2 2- Parça ve Aksesuarları... 3 3- Montaj ve Kullanım... 5 4- Teknik Özellikler... 8
 İÇİNDEKİLER 1- Alan Tarama Sistemleri... 2 2- Parça ve Aksesuarları... 3 3- Montaj ve Kullanım... 5 4- Teknik Özellikler... 8 1 ALAN TARAMA SİSTEMLERİ İnsanoğlu geçmişten günümüze yeraltında bulunan kendisi
İÇİNDEKİLER 1- Alan Tarama Sistemleri... 2 2- Parça ve Aksesuarları... 3 3- Montaj ve Kullanım... 5 4- Teknik Özellikler... 8 1 ALAN TARAMA SİSTEMLERİ İnsanoğlu geçmişten günümüze yeraltında bulunan kendisi
Bilgisayarda Programlama. Temel Kavramlar
 Bilgisayarda Programlama Temel Kavramlar KAVRAMLAR Programlama, yaşadığımız gerçek dünyadaki problemlere ilişkin çözümlerin bilgisayarın anlayabileceği bir biçime dönüştürülmesi / ifade edilmesidir. Bunu
Bilgisayarda Programlama Temel Kavramlar KAVRAMLAR Programlama, yaşadığımız gerçek dünyadaki problemlere ilişkin çözümlerin bilgisayarın anlayabileceği bir biçime dönüştürülmesi / ifade edilmesidir. Bunu
Automatic Entrance & Acccess System CS1000. Otomatik Kayar Kapı
 TM Automatic Entrance & Acccess System CS1000 Otomatik Kayar Kapı TM Automatic Entrance & Acccess System MODEL Kapasite Manuel Açma Gücü (Enerji olmadığı durumlarda) Operasyon Sıklığı Aktarma Kasnak -
TM Automatic Entrance & Acccess System CS1000 Otomatik Kayar Kapı TM Automatic Entrance & Acccess System MODEL Kapasite Manuel Açma Gücü (Enerji olmadığı durumlarda) Operasyon Sıklığı Aktarma Kasnak -
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU
 5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
KONVEYÖR EĞİTİM SETİ. Eğitim Araçları ONE PIECE CONVEYOR TRAINING SET. www.modulteknik.com
 KÖNVEYÖR (YÜRÜYEN BANT) Yaklaşık 200x1070 mm ölçülerinde Sağlam ve dayanıklı bant yapısı Ek yerlerinde kalınlık önleyici bağlantı sistemi ALÜMİNYUM BAĞLANTI PANOSU Yaklaşık 1060x780 mm boyutlarında alüminyum
KÖNVEYÖR (YÜRÜYEN BANT) Yaklaşık 200x1070 mm ölçülerinde Sağlam ve dayanıklı bant yapısı Ek yerlerinde kalınlık önleyici bağlantı sistemi ALÜMİNYUM BAĞLANTI PANOSU Yaklaşık 1060x780 mm boyutlarında alüminyum
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ Elektrik ve Elektronik Ölçmeler Laboratuvarı Deney Adı: Sensörler. Deney 5: Sensörler. Deneyin Amacı: A.
 Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
ACD BİLGİ İŞLEM ACD KABLOSUZ VERİ TOPLAMA SİSTEMLERİ URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ. URT-V2 Terminallerinin
 ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
Semboller : :Açma kapama alteri :Ate leme butonu :Yardımcı röle :Merkez kontak :Normalde açık kontak :Normalde kapalı kontak :UV.
 ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE. Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI
 ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
Temel Bilgisayar Programlama
 Temel Bilgisayar Programlama C Programlamaya Giriş Dr. Tahir Emre Kalaycı 2012 Dr. Tahir Emre Kalaycı () Temel Bilgisayar Programlama 2012 1 / 16 İçerik 1 Geçtiğimiz hafta 2 Yapısal Program Geliştirme
Temel Bilgisayar Programlama C Programlamaya Giriş Dr. Tahir Emre Kalaycı 2012 Dr. Tahir Emre Kalaycı () Temel Bilgisayar Programlama 2012 1 / 16 İçerik 1 Geçtiğimiz hafta 2 Yapısal Program Geliştirme
ERICH JAEGER KABLO VE BAĞLANTI ELEMANLARI KATALOĞU 2016
 ERICH JAEGER KABLO VE BAĞLANTI ELEMANLARI KATALOĞU 2016 1 HAKKIMIZDA Günümüz teknolojisini daha etkin kullanmak ve müşterilerine daha kaliteli hizmet verebilmek adına sürekli olarak kendini geliştirmeyi
ERICH JAEGER KABLO VE BAĞLANTI ELEMANLARI KATALOĞU 2016 1 HAKKIMIZDA Günümüz teknolojisini daha etkin kullanmak ve müşterilerine daha kaliteli hizmet verebilmek adına sürekli olarak kendini geliştirmeyi
Merkezi elektrik üniteleri. Genel. Araçta dört merkezi elektrik ünitesi vardır:
 Genel Araçta dört merkezi elektrik ünitesi vardır: Genel Açıklama Tanımlama Konum Merkezi elektrik ünitesi P2 Kabinde, yolcu koltuğunun Üstyapı merkezi elektrik P9 önünde, koruyucu mahfazanın ünitesi arkasındaki
Genel Araçta dört merkezi elektrik ünitesi vardır: Genel Açıklama Tanımlama Konum Merkezi elektrik ünitesi P2 Kabinde, yolcu koltuğunun Üstyapı merkezi elektrik P9 önünde, koruyucu mahfazanın ünitesi arkasındaki
Profesyonel, verimli, yenilikçi sistemler...
 ARKE Otomasyon Bil. Mak. San. ve Tic. Ltd. Şti. Atilla KARAÇAY Ramazan EKİN Proje & Yazılım 0.533 430 19 45 Üretim & Satış 0.533 223 13 46 atilla.karacay@arkeotomasyon.com ramazan.ekin@arkeotomasyon.com
ARKE Otomasyon Bil. Mak. San. ve Tic. Ltd. Şti. Atilla KARAÇAY Ramazan EKİN Proje & Yazılım 0.533 430 19 45 Üretim & Satış 0.533 223 13 46 atilla.karacay@arkeotomasyon.com ramazan.ekin@arkeotomasyon.com
 İstenilen sayıdaki varlığı yuvarlak içine al. 2 I 3 2 " 4 tane olanı yuvarlak içine al 4 4 4 4 4 4 5 Tane olanı yuvarlak içine al 5 5 5 5 "" " "" Legolarla toplama işlemlerini
İstenilen sayıdaki varlığı yuvarlak içine al. 2 I 3 2 " 4 tane olanı yuvarlak içine al 4 4 4 4 4 4 5 Tane olanı yuvarlak içine al 5 5 5 5 "" " "" Legolarla toplama işlemlerini
PROSES KONTROL DENEY FÖYÜ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
AVX 8710 SX4 NASIL MONTAJ YAPARIM?
 AVX 8710 SX4 NASIL MONTAJ YAPARIM? TEYP ÇERÇEVE KENARINDA Kİ KROMAJ ÇITALARI PLASTİK YARDIMI İLE SÖKÜNÜZ ORİJİNAL TEYP VE ALT KLİMA PANELİ AİT VİDALARI SÖKÜP CİHAZI DIŞARI ALINIZ YAN DİREK ÇITASINI VE
AVX 8710 SX4 NASIL MONTAJ YAPARIM? TEYP ÇERÇEVE KENARINDA Kİ KROMAJ ÇITALARI PLASTİK YARDIMI İLE SÖKÜNÜZ ORİJİNAL TEYP VE ALT KLİMA PANELİ AİT VİDALARI SÖKÜP CİHAZI DIŞARI ALINIZ YAN DİREK ÇITASINI VE
ÖDEV 08: Proses Maliyet Hesabı
 204END 08 ÖDEV- 1 ÖDEV 08: Proses Maliyet Hesabı Yrd. Doç. Dr. Ing. Halil İbrahim KORUCA Arş. Gör. Erdal AYDEMİR S.D.Ü. Mühendislik Mimarlık Fakültesi 32260 Isparta Tel: 0 246 211 1233 1291 Faks: 0 246
204END 08 ÖDEV- 1 ÖDEV 08: Proses Maliyet Hesabı Yrd. Doç. Dr. Ing. Halil İbrahim KORUCA Arş. Gör. Erdal AYDEMİR S.D.Ü. Mühendislik Mimarlık Fakültesi 32260 Isparta Tel: 0 246 211 1233 1291 Faks: 0 246
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar
 7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
4 SİLİNDİR BENZİNLİ MOTOR COK-G.ENRJ.005
 4 SİLİNDİR BENZİNLİ MOTOR COK-G.ENRJ.005 Teknik Açıklama Komple bir motor test standı olarak denet seti amaçlı tasarlanmıştır. Burada kullanılan motor kontrollü bir katalitik konvertör ile dört silindirli
4 SİLİNDİR BENZİNLİ MOTOR COK-G.ENRJ.005 Teknik Açıklama Komple bir motor test standı olarak denet seti amaçlı tasarlanmıştır. Burada kullanılan motor kontrollü bir katalitik konvertör ile dört silindirli
MANYETİK KARIŞTIRICI MODELLER: N11151 M / N11150 M KULLANMA KILAVUZU
 MANYETİK KARIŞTIRICI MODELLER: N11151 M / N11150 M KULLANMA KILAVUZU Fabrika Adres : İkitelli Organize San. Bölgesi İPKAS San Sitesi 10/A Blok No: 7 / 9 İkitelli / İstanbul Tel : (0212) 549 94 96 Fax :
MANYETİK KARIŞTIRICI MODELLER: N11151 M / N11150 M KULLANMA KILAVUZU Fabrika Adres : İkitelli Organize San. Bölgesi İPKAS San Sitesi 10/A Blok No: 7 / 9 İkitelli / İstanbul Tel : (0212) 549 94 96 Fax :
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
_PW1010. Kullanım ve Bakım Kılavuzu
 _PW1010 Kullanım ve Bakım Kılavuzu 0 1 Değerli müşterimiz; Büyük titizlikle hazırladığımız ve en kaliteli malzemeler kullanarak ürettiğimiz cihazımızı, uzun süre ve en iyi verimlilikle kullanmanızı istiyoruz.
_PW1010 Kullanım ve Bakım Kılavuzu 0 1 Değerli müşterimiz; Büyük titizlikle hazırladığımız ve en kaliteli malzemeler kullanarak ürettiğimiz cihazımızı, uzun süre ve en iyi verimlilikle kullanmanızı istiyoruz.
Çalışma Açısından Bilgisayarlar
 Çalışma Açısından Bilgisayarlar Ölçme sistemi ile hesaplama sistemi birbiriyle ilgili olmasına rağmen aynı değillerdir. Suyun sıcaklığı ve gürültünün şiddeti ile evdeki lambaların ölçülmesi aynı değillerdir.
Çalışma Açısından Bilgisayarlar Ölçme sistemi ile hesaplama sistemi birbiriyle ilgili olmasına rağmen aynı değillerdir. Suyun sıcaklığı ve gürültünün şiddeti ile evdeki lambaların ölçülmesi aynı değillerdir.
Endüstriyel Otomasyon
 Endüstriyel Otomasyon Endüstriyel otomasyon çok geniş kapsamlı bir konu olmakla birlikte temel olarak makinaların ve proseslerin otomatik kontrolü olarak tanımlanabilir. PLC, HMI paneller ve scada kullanılarak
Endüstriyel Otomasyon Endüstriyel otomasyon çok geniş kapsamlı bir konu olmakla birlikte temel olarak makinaların ve proseslerin otomatik kontrolü olarak tanımlanabilir. PLC, HMI paneller ve scada kullanılarak
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
1. PROGRAMLAMA. PDF created with pdffactory Pro trial version www.pdffactory.com
 . PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
. PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri
 Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri") YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
DOĞRUSAL YANGIN ALGILAMA SĐSTEMLERĐ
 DOĞRUSAL YANGIN ALGILAMA SĐSTEMLERĐ Mehmet Yavuz ALKAN yavuz.alkan@absalarm.com.tr ABS Alarm ve Bilgisayar Sistemleri San. ve Tic. A.Ş. 1203 / 11 Sokak No:3 Ömer Atlı Đş Merkezi Kat:5-505 Yenişehir ĐZMĐR
DOĞRUSAL YANGIN ALGILAMA SĐSTEMLERĐ Mehmet Yavuz ALKAN yavuz.alkan@absalarm.com.tr ABS Alarm ve Bilgisayar Sistemleri San. ve Tic. A.Ş. 1203 / 11 Sokak No:3 Ömer Atlı Đş Merkezi Kat:5-505 Yenişehir ĐZMĐR
12.Konu Rasyonel sayılar
 12.Konu Rasyonel sayılar 1. Rasyonel sayılar 2. Rasyonel sayılar kümesinde toplama ve çarpma 3. Rasyonel sayılar kümesinde çıkarma ve bölme 4. Tam rayonel sayılar 5. Rasyonel sayılar kümesinde sıralama
12.Konu Rasyonel sayılar 1. Rasyonel sayılar 2. Rasyonel sayılar kümesinde toplama ve çarpma 3. Rasyonel sayılar kümesinde çıkarma ve bölme 4. Tam rayonel sayılar 5. Rasyonel sayılar kümesinde sıralama
HSancak Nesne Tabanlı Programlama I Ders Notları
 DİZİLER Bellekte ard arda yer alan aynı türden nesneler kümesine dizi (array) denilir. Bir dizi içerisindeki bütün elemanlara aynı isimle ulaşılır. Yani dizideki bütün elemanların isimleri ortaktır. Elemanlar
DİZİLER Bellekte ard arda yer alan aynı türden nesneler kümesine dizi (array) denilir. Bir dizi içerisindeki bütün elemanlara aynı isimle ulaşılır. Yani dizideki bütün elemanların isimleri ortaktır. Elemanlar
Y-0056 PANO MONTÖRLÜĞÜ EĞİTİM SETİ
 Pano Montörlüğü Eğitim Seti, elektrik - elektronik alanında, bina iç - dış elektrik tesisatları, zayıf akım, kuvvetli akım, aydınlatma vb. panolarının tasarımı, malzemelerin yerleştirilmesi, bara ve kabloların
Pano Montörlüğü Eğitim Seti, elektrik - elektronik alanında, bina iç - dış elektrik tesisatları, zayıf akım, kuvvetli akım, aydınlatma vb. panolarının tasarımı, malzemelerin yerleştirilmesi, bara ve kabloların
FOLEN CAP SEALİNG AUTO 4000
 FOLEN CAP SEALİNG AUTO 4000 KURULUM VE KULLANMA KILAVUZU El ek t r o n ik O t o mas yo n Tek n o l o j il er i 1 2 0 3 /6 So ka k N o :1 /2 0 3 Bü yü kç a rşı Ye n işe h ir - İzm ir Tel & Faks: + 90 232
FOLEN CAP SEALİNG AUTO 4000 KURULUM VE KULLANMA KILAVUZU El ek t r o n ik O t o mas yo n Tek n o l o j il er i 1 2 0 3 /6 So ka k N o :1 /2 0 3 Bü yü kç a rşı Ye n işe h ir - İzm ir Tel & Faks: + 90 232
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş
 Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Sense it! Connect it! Bus it! Solve it! FOTOELEKTRİK SENSÖRLER
 Sense it! Connect it! Bus it! Solve it! FOTOELEKTRİK SENSÖRLER Sensör aileleri Q10 Minyatür Koruma devreli sağlam gövde ve dahili conta, sağlam metal destekli montaj delikleri ve 360º görülebilir durum
Sense it! Connect it! Bus it! Solve it! FOTOELEKTRİK SENSÖRLER Sensör aileleri Q10 Minyatür Koruma devreli sağlam gövde ve dahili conta, sağlam metal destekli montaj delikleri ve 360º görülebilir durum