MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
|
|
|
- Pembe Baştürk
- 8 yıl önce
- İzleme sayısı:
Transkript

1 Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Advanced Driver Assistance Systems CC ve ACC

2 Advanced Driver Assistance Systems
3 Advanced Driver Assistance Systems

4 SABİT HIZ KONTROL SİSTEMİ [CRUISE CONTROL SYSTEM - CC] CC, taşıtın ayarlanan sabit bir hızda hareket etmesine olanak sağlayan sistemdir. CC sistemleri gaz kelebeği konumunu kontrol ederek taşıtın sabit bir hızda seyretmesini sağlar. Bu işlevi, kontrol elemanına bağlı olan bir kablo vasıtasıyla yapar. Gaz kelebeği, motora alınacak havanın miktarını sınırlamayla motorun gücünü ve hızını kontrol eder. Bir çok otomobilde gaz kelebeğinin kontrolü için motor vakumuyla çalışan kontrol elemanları (actuator) kullanılır. Fren pedalına yada debriyaj pedalına basıldığında CC yi devreden çıkaran bir şalter vardır.

5 Şekil 1 [B] Gaz Kelebeğini Kontrol Eden Elektronik Kontrollü Vakum Actuatoru. B A Şekil 1 [A] Gaz Pedalı ve Vakum Actuatorı Kablo Bağlantıları [2]

![A Şekil 2 [A] Sabit Hız Kontrol Sistemi için Donanım Blok Diyagramı [3].](/docs-images/22/1594718/images/6-0.png "1-Direksiyon Kontrolü 2-Taşıt Hız Sinyali 3-Kavrama Pedalı Şalteri 4-Fren Pedal Şalteri 5-Vakum Valf Sinyal Kontrolü 6-Vakum Actuatorı 7-Throttle")
6 A Şekil 2 [A] Sabit Hız Kontrol Sistemi için Donanım Blok Diyagramı [3]. 1-Direksiyon Kontrolü 2-Taşıt Hız Sinyali 3-Kavrama Pedalı Şalteri 4-Fren Pedal Şalteri 5-Vakum Valf Sinyal Kontrolü 6-Vakum Actuatorı 7-Throttle Valfe Giden Kablo Şekil 2 [B] CC Sisteminin Hız Kontrolü Akış Şeması [2].



7 Bu sistemde; istenen hız, direksiyon altındaki butonlarla ayarlanabilmektedir. Şekil 3 de gösterildiği gibi sistem ON, OFF, RESUME, SET ACCEL ve COAST butonlarından oluşmaktadır. Ayrıca sistemin altıncı kontrolörü frenlerdir. Şekil 3. Sabit Hız Kontrol Butonları / Düğmeleri [2].


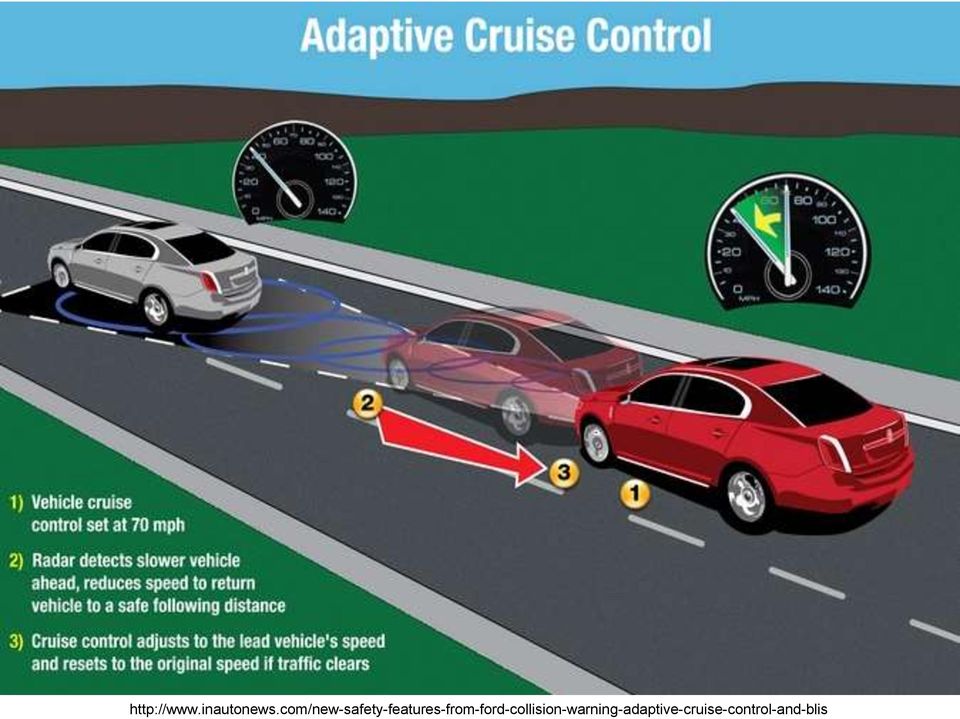
8 ADAPTİF SABİT HIZ KONTROL SİSTEMİ - ACC ACC sistemleri; yukarıda açıklanan CC sistemine ek olarak, önünde seyreden diğer araçları algılar ve öndeki araçla arada emniyetli bir mesafenin bırakılması için aracın hızını öndeki aracın hızına göre düzenleyen bir sistemdir. Bu amaçla öndeki aracın göreceli hızı ve aradaki mesafe sürekli ölçülür. Gerekli emniyet mesafesi araç hızı ile doğru orantılı olarak değişir. Araç hızlı giderken mesafe fazla, yavaş giderken ise az olmalıdır. Şeridin boş olduğu veya önde giden aracın daha hızlı seyrettiği durumlarda sistem CC ile aynı şekilde çalışarak aracın hedef hızda sabit hareketini sağlar; ancak önde daha yavaş giden bir araç algılandığında araç hızı da otomatik olarak düşürülür. Sistem; uzun yol sürücülerinin işini çok kolaylaştırması ve yorgunluğunu azaltmasının ötesinde, sollayan bir aracın aniden taşıtın önüne geçmesi, yola çıkan ani engellerin algılanması, sisli-puslu havalarda öndeki aracın emniyetli takibi gibi ani tepki verilmesi gereken durumlarda da aktif güvenliği artırıcı bir donanım olarak görülmektedir. Yolcu otomobilleri haricinde özellikle kamyon, otobüs gibi uzun yol araçlarında da yaygın olarak kullanılması hedeflenmektedir. Bu sistem, 1999 yılından itibaren lüks taşıtlarda opsiyonel olarak kullanılmaya başlamıştır.

9

10 ADAPTİF SABİT HIZ KONTROL SİSTEMİ - ACC (dvm.) ACC sistemi ile şehir dışı trafikte gaz ve fren pedalını kullanmadan araç sürmek mümkün olmaktadır. Araç; şerit boş olduğu sürece ayarlanan azami hızda seyretmekte, önde araç olduğunda ise onunla aynı hızda ve emniyetli bir sürüş mesafesi oluşturacak şekilde seyretmektedir. Şerit değiştirildiğindeyse, otomatik olarak taşıt hızlanmaktadır. Sistem; araç hızını kontrol ederken, elektronik gaz kelebeği kumandası ve vites değiştirme gibi işlevlerin dışında, belli bir şiddette frenleme de uygulayabilmektedir. Bu özellik ACC sistemini standart CC sistemlerinden ayırır. ACC sistemi; radar, sapma [rotadan çıkma], yanal ivmelenme, tekerlek hızı ve yönlendirme açıları hakkındaki bilgileri sensörlerden alır. Şekil 4 de ACC sisteminin temel çalışma şeması gösterilmiştir. Radar sensörü tampona yerleştirilmiştir ve öndeki şeritte bulunan taşıtı tanımlamada kullanılır. Motor gücü, taşıtlar arasında emniyetli sürüş mesafesini korumak için sistem tarafından kontrol edilir. Eğer iki taşıt birbirine çok yaklaşacak olursa sürücü ya ikaz ışıkları ya da sesli olarak uyarılır. NOTE: Laser-based systems require a clear field of vision for accurate range finding, so the laser must be mounted in the grille or behind the windshield (which provides additional protection against dirt and moisture). Radar-based systems, by comparison, are more expensive, but can be mounted behind plastic bumper covers and are unaffected by dirt or weather conditions.


11 Reading Text: Distance sensor: The most important component in an ACC system is a sensor which measures the distance, the relative speed and the relative position of the preceding vehicles. Maximum performance is achieved even in poor weather conditions with a radar sensor. The radar sensor operates at a frequency of GHz which was specially allocated for ACC. Three beams are emitted simultaneously for measurement purposes. The beams reflected by the preceding vehicles are analyzed regarding their propagation time, Doppler shift and amplitude ratio, and from these factors the distance, relative speed, and relative position are calculated.

12 Şekil 4 ACC Sisteminin Temel Çalışma Şeması [4].

 ACC sistemlerinde önceleri özellikle Japon firmaları tarafından lazer algılayıcılar kullanılmışsa da, bunlarda görülen sorunlar nedeniyle sonradan radar sensörlerine geçilmiştir [Şekil 5].")
13 ADAPTİF SABİT HIZ KONTROL SİSTEMİ - ACC (dvm.) ACC sistemlerinde önceleri özellikle Japon firmaları tarafından lazer algılayıcılar kullanılmışsa da, bunlarda görülen sorunlar nedeniyle sonradan radar sensörlerine geçilmiştir [Şekil 5]. Standart radar algılayıcıları, GHz frekansa 3 mw çıkış gücüne ve 150 metrelik menzile sahiptir. 30 ile 180 km/h arası hızlarda çalışabilen bu tür radarlar, aynı anda 30 nesneyi algılayabilmektedir. Sinyal işlemci, radardan gelen yansımaları değerlendirerek tüm nesnelerin hız ve mesafelerini sürekli takip eder. Öncelik en yakındaki nesneye verilir. Eğer nesne yaklaşmaktaysa araç hızı, bu nesnenin hızına düşünceye kadar azaltılır. Daha sonra aradaki mesafe sabit kalacak şekilde hız ayarlanır. Son zamanlarda giderek yaygınlaşan diğer bir metot ise Frekans Modülasyonlu Sürekli Dalga [FMCW] yöntemidir. Bu sistemde; taşıyıcı dalga sürekli olup, frekansı testere dişi sinyali ile modüle edilir. Giden ve yansıyan sinyaller arasındaki frekans farkı zamana, dolayısıyla mesafeye bağlı olacaktır. Böylece her iki sinyalin belli ölçüde çakıştırılmasıyla elde edilecek fark sinyalinin frekansı araçlar arasındaki mesafeye, frekans değişimi ise bağıl hıza karşılık gelmektedir. Radar, sadece kendi şeridinde giden araçları izleyebilmektedir. Bunu, dar ışın açılı [8º] sensörlerle düz bir yolda sağlamak kolaydır. Ancak sistemin virajlarda da etkin çalışabilmesi için nesnelere kilitlenerek onların hareketlerini izlemesi gerekmektedir. Bunun için ise nesnenin açı bilgisine ihtiyaç duyulur. Açının ölçümü için iki yöntem yaygındır.

![ADAPTİF SABİT HIZ KONTROL SİSTEMİ [ACC] (dvm.) 1. Taramalı Radarla Anten Yöntemi: Bu yöntemde; anten, titreşimli bir motora bağlıdır ve saniyede on kez belli bir açıyı tarar.](/docs-images/22/1594718/images/14-0.png "Algılanan nesne, o anki anten açısıyla eşleştirilir. 2. Stereoskopik Yöntem: Bu yöntemde ise iki anten kullanılır.")
14 ADAPTİF SABİT HIZ KONTROL SİSTEMİ [ACC] (dvm.) 1. Taramalı Radarla Anten Yöntemi: Bu yöntemde; anten, titreşimli bir motora bağlıdır ve saniyede on kez belli bir açıyı tarar. Algılanan nesne, o anki anten açısıyla eşleştirilir. 2. Stereoskopik Yöntem: Bu yöntemde ise iki anten kullanılır. Tam karşıdaki nesnelerin yansıması her iki antene aynı gecikmeyle gelirken, açılı nesnelerde antenlere ulaşacak ekoların gecikmesi farklı olacaktır. Sayısal sinyal işleme [DSP] birimi, direksiyon konum algılayıcısından gelen direksiyon açısı bilgisi ile, algılanan nesnenin uzaklık ve açı bilgilerini karşılaştırarak nesnenin bulunduğu şeride karar verir. Günümüz teknolojisi, ancak otoyollar ve keskin olmayan virajlar için doğru şerit seçimine imkan vermektedir. Araç; çevresini algılayan sensörlerdeki gelişmeler sonucunda, kendi çevresini tanıyabilen ve buna göre tepki veren araçların tasarlanması fikri ağırlık kazanmıştır. Akıllı Dur-Kalk Hız Sabitleyicisi, işlevini çok düşük hızlarda da sürdürebilmektedir. Yakın mesafenin algılanması için geniş açılı [100º] 24 GHz kısa menzil [20 m] radar veya kızılötesi [IR] dedektör kullanılmaktadır. Bu alanda yeni geliştirilen araçlarda; çevresini algılama sisteminde, orta mesafenin algılanması için video kamera [CCD] ve görüntü işlem birimi kullanılmaktadır. Video kamera kullanımı nesnelerin tanımlanmasını ve radar sensörlerinden gelen bilgiyle de karşılaştırarak doğru karar vermeyi kolaylaştırmaktadır. Bu sistemle aracın şehir içi dur-kalk trafiğinde kendi kendine hareket etmesi mümkün hale gelmektedir. Böylece sürücüye, pedallardan kurtularak, can sıkıcı şehir trafiğinde etrafını seyredebilme imkanı sağlamaktadır.



15 1. Lazer Radar 2. Kumanda / İşletme Butonları 3. Kontrolör 4. Motor ve Vites Kutusu Şekil 5 Lazer Radar Sensörünün Öndeki Taşıtı Algılaması [5].


16 ACC SİSTEMİNİN MOTORA MÜDAHALESİ: Hız kontrolü, bir elektronik motor güç yönetim sistemi gerektirir. Böyle bir sistem; taşıtın arzulanan hıza çıkmasına olanak verir yada eğer bir engel algılanırsa, otomatik olarak gaz kelebeğini kapamayla taşıtın hızını keser [4]. ACC SİSTEMİNİN AKTİF FREN MÜDAHALESİ: Yapılan deneyler; gaz kelebeği müdahalesinin, tek başına taşıtın yavaşlamasını yeterince sağlayamadığını göstermiştir. ACC sistemi sadece yumuşak fren müdahalesine izin verir [5,6]. Bundan dolayı, önde yavaş hareket etmekte olan bir taşıtın ani olarak şerit değiştirmesi gibi engellerin vuku bulmasında acil frenleme mümkün olamamaktadır. Sistem; frenlerin bloke olmasını önleyici sistemle [anti-lock brake system- ABS], çekiş kontrol sistemiyle [Traction control system - TCS] ve taşıt stabilitesini iyileştirme sistemiyle [vehicle stability enhancement - VSE] koordineli olarak ideal frenleme performansı sağlar. Sürücünün fren pedalı üzerinde etkisi olmaksızın otomatik frenleme temin eder. ABS kontrolörü, modülatördeki motorun merkez silindirinden fren hidroliğini selenoid valfler vasıtasıyla tekerlek frenleme hatlarına pompalaması sinyalini gönderir. Neticede düzgün ve sessiz bir şekilde taşıtın hızı azaltılır. ACC li otomatik frenleme; tekerlek fren merkezleri ve izolasyon valfleri arasındaki hidrolik akışkanı ayarlamakta, değişken izolasyonlu valflerden [variable insulation valve - VIV] yararlanır [6].


17 ACC SİSTEMİNİN AKTİF FREN MÜDAHALESİ (dvm.): VIV teknolojisi, aşırı derecede düşük basınç atımlı selenoid valfin delikleri arasından frenleme akışkanını kısma fonksiyonunu icra eder. VIV, akışkan akışına orantılı olarak uygulanan voltajla cazip bir alternatif sunmakta ve bugünkü endüstriyel pazarlarda mevcut olan geleneksel ON / OFF tarzı selenoid valflerin sınırlamalarının üstesinden gelmektedir. Taşıttaki ACC sistemi üç durumda devre dışı kalır. Bunlar; 1. Sürücü Frene Bastığında: ACC devre dışı kalır. 2. Sürücü Taşıtın Hızını Arttırdığında: ACC aktif kalır; fakat sistem, eğer yeni bir seyir hızı ayarlanmazsa sürücü gazı keser kesmez taşıt daha önce ayarlanan hıza döner. 3. Öndeki Engeli Algılama/Saptama Sistemi [Forward Obstacle Detection System]: Sistem, önündeki şeritte daha yavaş seyreden bir taşıtı algıladığında devreden çıkar. ACC nin taşıtı frenlemesi için hız kesme kontrolü; ABS modülatörü, kontrol elemanlı frenleme uygulaması [brake-by wire] yada akıllı basınç arttırıcıyla [smart booster] yapılır. Akıllı basınç arttırıcı kullanmayla hız kesme kontrolünde; basınç arttırıcı içindeki vakumun ayarlanması ve hava akış valfini kontrol etmesiyle yapılır. Son kontrol elemanlarına sahip bir frenleme uygulamasındaki hız kesme kontrolü; tekerleklere frenleme uygulayan her bir tekerlekteki son kontrol elemanına frenleme sinyali göndermeyle yapılır. ABS modülatörü kullanmayla hız kesme kontrolündeyse; modülatördeki selenoid valflerle, tekerlek basıncı ayarlanır. Hız kesme kontrolünde kullanılan modülatörler genellikle VIV teknolojisinden yararlanılarak üretilir. Bu teknoloji düzgün ve sessiz bir yavaşlama sağlar. Ayrıca taşıtın negatif ivmelenmesine bağlı olarak direksiyonda ve taşıtın gövdesinde oluşan titreşimleri minimize etmektedir.


18 Dur Kalk İşlevli Aktif Cruise Control Dur & Kalk işlevli aktif cruise control, gerektiğinde hızı sıfıra kadar düşürerek, aracınızı öndeki araçtan önceden tanımlanmış mesafe kadar geride kalmasını sağlar. Trafik yeniden hareket ettiğinde sistem aracınızı hızlandırarak, mümkünse tercih ettiğiniz seyir hızına ulaştırır. Dur & Kalk işlevli aktif cruise control ün (ACC) öncelikle otobanlarda bir sürücü destek sistemi olarak hizmet görmesi amaçlanmıştır. 150 metreye kadar menzili olan üç radar algılayıcı önünüzdeki yolu sürekli olarak tarar. Şeridinizde sizden daha yavaş seyreden bir araca yaklaştıkça sistem, motor kontrol birimini gücü düşürecek ve gerekirse fren yapacak şekilde yönlendirerek, öndeki araçtan önceden tanımlanmış mesafe kadar geride kalmanızı sağlar. Eğer öndeki araç durursa, dur & kalk işlevli ACC aracınızı da tamamen durdurur. Öndeki araç yeniden hareket ettiğinde veya şerit değiştirdiğinde, dur & kalk işlevli ACC motor gücünü artırır ve mümkün olduğunda aracınızın hızını tercih ettiğiniz seyir hızına kadar yükseltir. Eğer durma süresi üç saniyeden uzun olursa, dur & kalk işlevli ACC, aracın yeniden harekete geçmesi için hafifçe gaz pedalına ya da ACC düğmesine basmanızı gerektirir. Eğer durma süresi üç saniyeden kısa ise hızlanma otomatiktir. Dört adede kadar farklı seyir hızı önceden tanımlanabilir ve bunlar bir tuşa basılarak aktifleştirilebilir. En düşük seyir hızı 30 km/h; azami seyir hızı 180 km/h dir. Öndeki araç ile aranızdaki mesafe metre yerine saniyeler ile ölçülür. Bu sayede seyahat ettiğiniz hıza bağlı olarak yeterli tepki sürenizin olması sağlanır. Dur & Kalk işlevli ACC, sürüşü daha rahat ve güvenli bir hale getirir. Gerekli olduğu takdirde virajlarda, DSC ve navigasyon sisteminden alınan verileri kullanarak güvenli bir hız hesaplar ve hızınızı ayarlar. Çok şeritli yollarda sistem, bulunduğunuz şeritte ve komşu şeritlerde bulunan araçları ayırt edebilir. Dur & Kalk işlevli ACC, herhangi bir zamanda gaz veya fren pedalına basılarak devre dışı bırakılabilir ve hızınızın kontrolünü tümüyle size bırakır. Dur & Kalk işlevli Aktif Cruise Control bir otomatik pilot değildir. Eğer önünüzdeki araç ani ve sert bir fren yaparsa veya sistem kritik bir durum algılarsa, sürücüyü sesli ve optik uyarılar ile ikaz eder. Her durumda Dur & Kalk işlevli ACC, yoğun trafikte araç kullanmayı çok daha az yorucu bir hale getirir. Kaynak: BMW.com.tr web sitesi, BMW Teknoloji Rehberi (Erişim Tarihi: 03/04/2014).


19 Özetle Hız Kontrol Sistemi (Cruise Control System CCS), özellikle şehirlerarası trafikte, aracın sabit bir hızda seyrini mümkün kılan bir yardımcı sistemdir. Trafiğin yoğun olmadığı otoyol vb. yollarda sürücü, izin verilen azami hızı geçmemek için bir gözü hız göstergesinde, sürekli olarak araç hızını sabit tutmaya çalışmaktadır. Özellikle yol eğiminin değişmesiyle hızı düzeltmek için gaz pedalına müdahale ihtiyacı duymaktadır. Hız kontrol sistemi, sürücüyü bu zahmetten kurtarmak amacıyla tasarlanmıştır. Bu sistem sayesinde sürücü, hem hız göstergesini sürekli kontrol etmekten kurtularak yola daha fazla konsantre olabilecek, hem de ayağını gaz pedalından tamamen çekerek daha rahat bir sürüş imkanı kazanacaktır. Akıllı Hız Sabitleme Sistemi (Adaptive Cruise Control ACC), CC sisteminin gelişmişidir. Akıllı Hız Sabitlemenin hedefi, öndeki araçla arada emniyetli bir mesafenin bırakılmasıdır. Bu amaçla öndeki aracın göreceli hızı ve aradaki mesafe sürekli ölçülür. Gerekli emniyet mesafesi araç hızı ile doğru orantılıdır; araç hızlı giderken mesafe fazla, yavaş giderken ise az olmalıdır. Genel kabul gören kural, her 10 km/h hız için 5 metre mesafenin korunmasıdır ki bu da araçlar arasında yaklaşık 2 saniyelik süre bulunması anlamına gelir. Yani araç hızdan bağımsız olarak 2 saniye içinde öndeki araca yetişmelidir. Sistem bu sürenin sürücü tarafından değiştirilmesine de olanak sağlamaktadır. / Ref: Otoguncel


20 Active Cruise Control Trafiğin yoğun olduğu otobanlarda araç kullanmak Aktif Cruise Control ile çok daha rahattır. Aktif Cruise Control, mümkün olduğunda, aracınızı şeridinizde önünüzdeki araçtan önceden tanımlanmış mesafe kadar geride tutar. Aracın ön tarafındaki radar algılayıcı önünüzdeki yolu sürekli olarak tarar. Aracınız daha yavaş seyreden bir araca yaklaştıkça, Aktif Cruise Control otomatik olarak motor gücünü düşürerek hafifçe fren yapar ve aracınızı öndeki araçtan önceden tanımlanmış mesafe kadar geride tutar. Bu mesafe metre olarak değil saniye olarak ayarlanır, böylelikle mevcut hızınıza bağlı olarak güvenli bir tepki süresi her zaman korunmuş olur. Şerit boşaldığında, Aktif Cruise Control otomatik olarak aracın hızını tercih ettiğiniz seyir hızına kadar artırır. Dört adede kadar farklı seyir hızını önceden programlamak mümkündür. Gaz veya fren pedalına bir kez dokunarak, sistemi devre dışı bıraklılabilir. Aktif Cruise Control, virajlarda Dinamik Denge Kontrolü ve navigasyon sisteminden aldığı veriler ile seyir hızının ayarlanmasının gerekip gerekmediğini hesaplar ve radar alanındaki araçların aynı şeritte mi yoksa komşu şeritte mi olduğunu belirler. Yüksek performanslı radar algılayıcılar soğuk havalarda ısıtılarak, yılın her döneminde kullanılabilmesi sağlanır. Sistemin bir otomatik pilot gibi hizmet görmesi amaçlanmamıştır; bu hız aralığının dışında ve ani hız kesme gerekli olduğunda sürücü bir uyarı sesi ve görsel mesaj ile uyarılır. Önce ikaz sinyali verilir ardından gösterge tablosunda veya Control Display de kırmızı renkli otomobil sembolü biçiminde güçlü bir uyarı verilir. Aynı zamanda fren balataları ve diskler arasındaki mesafe sürücünün ani fren yapma gerekliliği düşünülerek azaltılır. Kaynak: BMW.com.tr web sitesi, BMW Teknoloji Rehberi (Erişim Tarihi: 03/04/2014).


21 Adaptive Cruise Control (ACC) The basic function of Adaptive Cruise Control relies on the conventional cruise control system (vehicle-speed controller), which maintains a desired speed specified by the driver. In addition, ACC can adapt vehicle speed to changing traffic conditions by means of automatic acceleration, deceleration or braking. This system thus maintains the vehicle's distance to the vehicle driving in front as a function of road speed. Distance sensor: The most important component in an ACC system is a sensor which measures the distance, the relative speed and the relative position of the preceding vehicles. Maximum performance is achieved even in poor weather conditions with a radar sensor. The radar sensor operates at a frequency of GHz which was specially allocated for ACC. Three beams are emitted simultaneously for measurement purposes. The beams reflected by the preceding vehicles are analyzed regarding their propagation time, Doppler shift and amplitude ratio, and from these factors the distance, relative speed, and relative position are calculated.
 is evaluated with regard to the ACC-equipped vehicle's actual")
22 Course Setting To ensure reliable ACC operation, no matter what the situation e.g. also on curves/bends it is essential that the preceding vehicles are allocated to the correct lane(s). For this purpose, the information from the ESP sensor system (yaw rate, steering-wheel angle, wheel speeds and lateral acceleration) is evaluated with regard to the ACC-equipped vehicle's actual curve status. Further information on the traffic flow is obtained from the radar signals. Video imaging and navigation systems are also being considered for future assistance in defining the courses taken by the vehicles. Active brake intervention Experience has shown that deceleration by means of throttle closing is not sufficient for ACC operation. Only the inclusion of brake intervention makes it possible for longer follow-on control operations with ACC without the need for frequent driver interventions. ESP provides the possibility of braking without driver intervention. ACC permits only "soft" brake interventions. Emergency braking due to the sudden appearance of obstacles (e.g. the slow-moving vehicle in front suddenly changing its lane) is therefore not possible.

23 Adaptive Cruise Control Though most people think cruise control is more of a convenience option than a safety feature, next generation adaptive cruise control systems are combining both. Conventional cruise control systems simply maintain a preset speed. The driver presses a button to set the speed, and a servo or actuator on the throttle linkage maintains that speed until the driver steps on the brake, changes the speed setting up or down, or disengages the cruise control. Adaptive cruise control (ACC), by comparison, is a smart system that actively maintains a preset distance between vehicles rather than a preset speed. A laser or radar range finder sensor in the front of the vehicle measures the distance to the vehicle ahead. The driver then selects a distance that suits the driving conditions, and the system automatically maintains that distance as traffic speeds up and slows down. This makes adaptive cruise control much better than conventional cruise control for driving in heavy traffic, and it reduces the risk of rear ending another vehicle if the driver isn t paying attention. Laser-based systems require a clear field of vision for accurate range finding, so the laser must be mounted in the grille or behind the windshield (which provides additional protection against dirt and moisture). Radar-based systems, by comparison, are more expensive, but can be mounted behind plastic bumper covers and are unaffected by dirt or weather conditions.
 The adaptive cruise control module (which may be its own separate module or integrated into the body control module) interacts not only with the throttle, but also the brake system to speed up or")
24 Adaptive Cruise Control (cont.) The adaptive cruise control module (which may be its own separate module or integrated into the body control module) interacts not only with the throttle, but also the brake system to speed up or slow down the vehicle as needed. This requires a lot of two-way communication, data sharing and feedback via the vehicle s controller area network system. The active cruise control module needs inputs from its range finder sensor as well as vehicle speed, throttle position and braking status so it can calculate and maintain the proper following distance. Consequently, if there are any communication faults on the CAN bus, or the vehicle has lost input from a key sensor such as the laser or radar range finder, the vehicle speed sensor or throttle position sensor, the system can t function. The same is true if it can t communicate with the throttle control system and brakes to regulate vehicle speed. Any of these faults should set one or more codes and make adaptive cruise control unavailable until the problem has been diagnosed and repaired. Diagnostics currently require a factory scan tool and software to run system selftests and to check the range finder s inputs. Replacement modules and range sensors are currently dealer-only parts, but that will likely change as time goes on and these systems become more common.

25 Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trtur, Edition date: 02/2014 ÖRNEK: 2014 Model Tourneo Courier Hız kontrol sistemi, ayağınızı gaz pedalı üzerinde tutmadan ayarlanmış hızı korumanızı sağlar. Hız kontrol sistemini aracınızın hızı 30 km/h üzerinde olduğunda kullanabilirsiniz.

 trtur, Edition")
26 ÖRNEK: 2014 Model Tourneo Courier Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trtur, Edition date: 02/2014
27 ÖRNEK: 2014 Model Tourneo Courier Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trtur, Edition date: 02/2014
28 ÖRNEK: 2014 Model Tourneo Courier Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trtur, Edition date: 02/2014
29 RADAR VE LAZER SENSÖR
30 Advanced Driver Assistance Systems Single sensor, single function Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
31 Advanced Driver Assistance Systems Single sensor, dual function Example current generation radar sensors Multiple sensors, dual function Forward Collision Warning (FCW) Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
32 Advanced Driver Assistance Systems Architecture Haptic: dokunma/temas duyusu ile ilgili Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
33 Environment Perception Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
34 Environment Perception Reflectivity of selected objects Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
35 Environment Perception Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
36 1. Detection Environment Perception 2. Processing Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
37 Environment Perception 3. Environment representaion Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
38 Environment Perception 4. Function specific environment description Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

39 Environment Perception Sensors Radar Lidar Computer Vision Radar Lidar: Işıklı radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
40 Radar Equation Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
41 Radar Radar Equation Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
42 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

43 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

44 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
45 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
46 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
47 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
48 Radar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

49 Radar Angular Measurement Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
50 1974 Radar 1981 Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014


51 Radar Continental ARS 300 Long Range Radar 77 GHz Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
52 Radar Vehicle Integration Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
53 Radar Vehicle Integration Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
54 Radar LRR3: ECU Board and RF Module source: Bosch Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

55 Radar Adaptive Cruise Control Predictive Emergency Braking Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
 a method of detecting distant objects and determining their")
56 Lidar «Lidar» nedir? A detection system which works on the principle of radar, but uses light from a laser (acronym for Laser Imaging Detection and Ranging) a method of detecting distant objects and determining their position, velocity, or other characteristics by analysis of pulsed laser light reflected from their surfaces. Işıklı radar Kaynak: Seslisozluk Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
57 Lidar Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
58 Predictive Emergency Braking Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
59
60 ÖRNEK UYGULAMALAR
61 Design of Adaptive Cruise Control System - A Timecritical Data Driven Approach by Neera Sharma ( ) under the guidance of Prof. Krithi Ramamritham
62 Motivation Intelligent automotive applications require efficient management of time-sensitive data. Existing approaches for ACC design Control theory based Ad hoc data management Systematic data management could improve the efficiency of control theory driven approaches. We propose a model for designing a real-time data repository for ACC.
63 Outline Introduction to ACC Functional Model Data Management in ACC Real-time repository model Task scheduling in the model Used techniques and performance results Mode Change Behavior of ACC Issues in mode change design
64 Adaptive Cruise Control ACC Controls vehicle speed to maintain a safe distance from leading vehicle, automatically. Detects lead vehicle using sensors. Adjusts speed based on the velocity and distance from detected vehicle. Increases safety and driver comfort. Next step towards fully autonomous vehicles.
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.org ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (3) 33-39 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Seyir Kontrol Sistemlerinin (CC ACC) Frenleme Performansına Olan
www.teknolojikarastirmalar.org ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (3) 33-39 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Seyir Kontrol Sistemlerinin (CC ACC) Frenleme Performansına Olan
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Advanced Driver Assistance Systems CC ve ACC Advanced Driver Assistance Systems Advanced Driver Assistance
Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Advanced Driver Assistance Systems CC ve ACC Advanced Driver Assistance Systems Advanced Driver Assistance
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Abdullah DEMİR, Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ CC, ACC, CACC SAE J3016 Definitions Levels of Automation Fundamental Issues in Road Transport Automation; Steven E.
Abdullah DEMİR, Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ CC, ACC, CACC SAE J3016 Definitions Levels of Automation Fundamental Issues in Road Transport Automation; Steven E.
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Abdullah DEMİR, Yrd. Doç. Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Advanced Driver Assistance Systems ITS, CC, ACC, CACC Intelligent Vehicles Ref.: Charles Desjardins, "Cooperative
Abdullah DEMİR, Yrd. Doç. Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Advanced Driver Assistance Systems ITS, CC, ACC, CACC Intelligent Vehicles Ref.: Charles Desjardins, "Cooperative
Unlike analytical solutions, numerical methods have an error range. In addition to this
 ERROR Unlike analytical solutions, numerical methods have an error range. In addition to this input data may have errors. There are 5 basis source of error: The Source of Error 1. Measuring Errors Data
ERROR Unlike analytical solutions, numerical methods have an error range. In addition to this input data may have errors. There are 5 basis source of error: The Source of Error 1. Measuring Errors Data
Yüz Tanımaya Dayalı Uygulamalar. (Özet)
") 4 Yüz Tanımaya Dayalı Uygulamalar (Özet) Günümüzde, teknolojinin gelişmesi ile yüz tanımaya dayalı bir çok yöntem artık uygulama alanı bulabilmekte ve gittikçe de önem kazanmaktadır. Bir çok farklı uygulama
4 Yüz Tanımaya Dayalı Uygulamalar (Özet) Günümüzde, teknolojinin gelişmesi ile yüz tanımaya dayalı bir çok yöntem artık uygulama alanı bulabilmekte ve gittikçe de önem kazanmaktadır. Bir çok farklı uygulama
First Stage of an Automated Content-Based Citation Analysis Study: Detection of Citation Sentences
 First Stage of an Automated Content-Based Citation Analysis Study: Detection of Citation Sentences Zehra Taşkın, Umut Al & Umut Sezen {ztaskin, umutal, u.sezen}@hacettepe.edu.tr - 1 Plan Need for content-based
First Stage of an Automated Content-Based Citation Analysis Study: Detection of Citation Sentences Zehra Taşkın, Umut Al & Umut Sezen {ztaskin, umutal, u.sezen}@hacettepe.edu.tr - 1 Plan Need for content-based
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Grup Adı: Sıvı Seviye Kontrol Deneyi.../..
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Grup Adı: Sıvı Seviye Kontrol Deneyi.../../2015 KP Pompa akış sabiti 3.3 cm3/s/v DO1 Çıkış-1 in ağız çapı 0.635 cm DO2
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Grup Adı: Sıvı Seviye Kontrol Deneyi.../../2015 KP Pompa akış sabiti 3.3 cm3/s/v DO1 Çıkış-1 in ağız çapı 0.635 cm DO2
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Şerit Takip sistemi Kör Nokta Bilgi Sistemi BLIS Park Asistanı -Ekler- Kaynak: Toyota Kaynak: Toyota http://www.inautonews.com/new-safety-features-from-ford-collision-warning-adaptive-cruise-control-and-blis
Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Şerit Takip sistemi Kör Nokta Bilgi Sistemi BLIS Park Asistanı -Ekler- Kaynak: Toyota Kaynak: Toyota http://www.inautonews.com/new-safety-features-from-ford-collision-warning-adaptive-cruise-control-and-blis
Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu
 Optimization of Air Distribution in Waste Water Treatment Plants to Save Energy Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu Jan Talkenberger, Binder Group, Ulm, Germany
Optimization of Air Distribution in Waste Water Treatment Plants to Save Energy Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu Jan Talkenberger, Binder Group, Ulm, Germany
Dr. Aysın Yeltekin. EST Enerji
 Dr. Aysın Yeltekin EUREKA PROJELERİMİZ EUREKA, E!1770 St. Joseph 2000, EUREKA E!2007, Pack 2000 EUREKA E! 2659 ONE ECOPOWER, EUROSTARS EUREKA E!4720 PLUG and PACK St. Joseph 2000, EUREKA project, E!1770,
Dr. Aysın Yeltekin EUREKA PROJELERİMİZ EUREKA, E!1770 St. Joseph 2000, EUREKA E!2007, Pack 2000 EUREKA E! 2659 ONE ECOPOWER, EUROSTARS EUREKA E!4720 PLUG and PACK St. Joseph 2000, EUREKA project, E!1770,
Bölüm 1 Ürüne Genel Bakış
 Bölüm 1 Ürüne Genel Bakış 1.1 Ürün Etiketi Şekil 1-1 Etiket Model Instruction Model numarası bazı rakam ve harfler içerir. Bu işaretler cihazın gücünü, güç seviyesini ve bazı diğer özel bilgileri içerir.
Bölüm 1 Ürüne Genel Bakış 1.1 Ürün Etiketi Şekil 1-1 Etiket Model Instruction Model numarası bazı rakam ve harfler içerir. Bu işaretler cihazın gücünü, güç seviyesini ve bazı diğer özel bilgileri içerir.
Ardunio ve Bluetooth ile RC araba kontrolü
 Ardunio ve Bluetooth ile RC araba kontrolü Gerekli Malzemeler: 1) Arduino (herhangi bir model); bizim kullandığımız : Arduino/Geniuno uno 2) Bluetooth modül (herhangi biri); bizim kullandığımız: Hc-05
Ardunio ve Bluetooth ile RC araba kontrolü Gerekli Malzemeler: 1) Arduino (herhangi bir model); bizim kullandığımız : Arduino/Geniuno uno 2) Bluetooth modül (herhangi biri); bizim kullandığımız: Hc-05
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
Virtualmin'e Yeni Web Sitesi Host Etmek - Domain Eklemek
 Yeni bir web sitesi tanımlamak, FTP ve Email ayarlarını ayarlamak için yapılması gerekenler Öncelikle Sol Menüden Create Virtual Server(Burdaki Virtual server ifadesi sizi yanıltmasın Reseller gibi düşünün
Yeni bir web sitesi tanımlamak, FTP ve Email ayarlarını ayarlamak için yapılması gerekenler Öncelikle Sol Menüden Create Virtual Server(Burdaki Virtual server ifadesi sizi yanıltmasın Reseller gibi düşünün
WEEK 11 CME323 NUMERIC ANALYSIS. Lect. Yasin ORTAKCI.
 WEEK 11 CME323 NUMERIC ANALYSIS Lect. Yasin ORTAKCI yasinortakci@karabuk.edu.tr 2 INTERPOLATION Introduction A census of the population of the United States is taken every 10 years. The following table
WEEK 11 CME323 NUMERIC ANALYSIS Lect. Yasin ORTAKCI yasinortakci@karabuk.edu.tr 2 INTERPOLATION Introduction A census of the population of the United States is taken every 10 years. The following table
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.org ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2006 (1) 50-59 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Otomobillerde Kullanılan Frenleme Yardımcı Sistemlerinin İncelenmesi
www.teknolojikarastirmalar.org ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2006 (1) 50-59 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Otomobillerde Kullanılan Frenleme Yardımcı Sistemlerinin İncelenmesi
Electronic Letters on Science & Engineering 5(1) (2009) Available online at www.e-lse.org
 (2009) Available online at www.e-lse.org") Electronic Letters on Science & Engineering 5(1) (2009) Available online at www.e-lse.org Traffic Signaling with Sensor and Manual Control Sıtkı AKKAYA Erciyes Üniversitesi, Mühendislik Fakültesi, Elektrik
Electronic Letters on Science & Engineering 5(1) (2009) Available online at www.e-lse.org Traffic Signaling with Sensor and Manual Control Sıtkı AKKAYA Erciyes Üniversitesi, Mühendislik Fakültesi, Elektrik
Argumentative Essay Nasıl Yazılır?
 Argumentative Essay Nasıl Yazılır? Hüseyin Demirtaş Dersimiz: o Argumentative Essay o Format o Thesis o Örnek yazı Military service Outline Many countries have a professional army yet there is compulsory
Argumentative Essay Nasıl Yazılır? Hüseyin Demirtaş Dersimiz: o Argumentative Essay o Format o Thesis o Örnek yazı Military service Outline Many countries have a professional army yet there is compulsory
PİEZOELEKTRİK YAMALARIN AKILLI BİR KİRİŞİN TİTREŞİM ÖZELLİKLERİNİN BULUNMASINDA ALGILAYICI OLARAK KULLANILMASI ABSTRACT
 PİEZOELEKTRİK YAMALARIN AKILLI BİR KİRİŞİN TİTREŞİM ÖZELLİKLERİNİN BULUNMASINDA ALGILAYICI OLARAK KULLANILMASI Uğur Arıdoğan (a), Melin Şahin (b), Volkan Nalbantoğlu (c), Yavuz Yaman (d) (a) HAVELSAN A.Ş.,
PİEZOELEKTRİK YAMALARIN AKILLI BİR KİRİŞİN TİTREŞİM ÖZELLİKLERİNİN BULUNMASINDA ALGILAYICI OLARAK KULLANILMASI Uğur Arıdoğan (a), Melin Şahin (b), Volkan Nalbantoğlu (c), Yavuz Yaman (d) (a) HAVELSAN A.Ş.,
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Abdullah DEMİR, Yrd. Doç. Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Lane Keeping System Kör Nokta Bilgi Sistemi BLIS Park Asistanı Lane Keeping Assist Helps keep drivers within
Abdullah DEMİR, Yrd. Doç. Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Lane Keeping System Kör Nokta Bilgi Sistemi BLIS Park Asistanı Lane Keeping Assist Helps keep drivers within
GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ
 GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket
GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket
Gezgin İletişim Sistemleri
 Gezgin İletişim Sistemleri HÜCRESEL AĞLAR Cellular Networks Assoc. Prof. Hakan DOGAN Notlar 3 Devam Doç. Dr. Hakan DOGAN Büyük bir bahçenin sulamasını gerçekleştirmek için sabit ve her yöne su veren cihazlarımızın
Gezgin İletişim Sistemleri HÜCRESEL AĞLAR Cellular Networks Assoc. Prof. Hakan DOGAN Notlar 3 Devam Doç. Dr. Hakan DOGAN Büyük bir bahçenin sulamasını gerçekleştirmek için sabit ve her yöne su veren cihazlarımızın
WEEK 4 BLM323 NUMERIC ANALYSIS. Okt. Yasin ORTAKCI.
 WEEK 4 BLM33 NUMERIC ANALYSIS Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
WEEK 4 BLM33 NUMERIC ANALYSIS Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 NONLINEAR EQUATION SYSTEM Two or more degree polinomial
Otomatik moment değiştiriciler
 Otomatik moment değiştiriciler ANA FONKSİYON GRUPLARI 1. Hidrodinamik moment değiştirici (Trilok moment değiştirici), 2. Gereken sayıda kademeleri olan dişli grubu (genel olarak lamelli kavramalarla ve
Otomatik moment değiştiriciler ANA FONKSİYON GRUPLARI 1. Hidrodinamik moment değiştirici (Trilok moment değiştirici), 2. Gereken sayıda kademeleri olan dişli grubu (genel olarak lamelli kavramalarla ve
AKE Bulaşık Yıkama Makinası Kontrol Kartı Kullanım Kılavuzu Dishwasher Controller User Manual TR EN
 Bulaşık Yıkama Makinası Kontrol Kartı Kullanım Kılavuzu Dishwasher Controller User Manual Bulaşık Yıkama Makinası Kontrol Kartı Kullanım Kılavuzu (7 SEG SIMPLE YATAY TİP) AKE-BYM-102 Lütfen bu kullanım
Bulaşık Yıkama Makinası Kontrol Kartı Kullanım Kılavuzu Dishwasher Controller User Manual Bulaşık Yıkama Makinası Kontrol Kartı Kullanım Kılavuzu (7 SEG SIMPLE YATAY TİP) AKE-BYM-102 Lütfen bu kullanım
Sınavında sık yapılan temel hatalar:
 Sınavında sık yapılan temel hatalar: 1) İsim tamlamalarında hata yapılabiliyor. Aşağıda bir kaç örnekle doğru ve yanlış kullanımlar gösterilmiştir. Belirtili isim tamlaması: Hem tamlayan (1. isim) hem
Sınavında sık yapılan temel hatalar: 1) İsim tamlamalarında hata yapılabiliyor. Aşağıda bir kaç örnekle doğru ve yanlış kullanımlar gösterilmiştir. Belirtili isim tamlaması: Hem tamlayan (1. isim) hem
SBR331 Egzersiz Biyomekaniği
 SBR331 Egzersiz Biyomekaniği Açısal Kinematik 1 Angular Kinematics 1 Serdar Arıtan serdar.aritan@hacettepe.edu.tr Mekanik bilimi hareketli bütün cisimlerin hareketlerinin gözlemlenebildiği en asil ve kullanışlı
SBR331 Egzersiz Biyomekaniği Açısal Kinematik 1 Angular Kinematics 1 Serdar Arıtan serdar.aritan@hacettepe.edu.tr Mekanik bilimi hareketli bütün cisimlerin hareketlerinin gözlemlenebildiği en asil ve kullanışlı
Manyetostatik algılayıcılar Manyetostatik algılayıcılar DC manyetik alan ölçüm prensibine göre çalışırlar. Bu tip algılayıcılar Manyetik endüktif
 Manyetostatik algılayıcılar Manyetostatik algılayıcılar DC manyetik alan ölçüm prensibine göre çalışırlar. Bu tip algılayıcılar Manyetik endüktif sensörlerin (Bobin) aksine minyatürizasyon için çok daha
Manyetostatik algılayıcılar Manyetostatik algılayıcılar DC manyetik alan ölçüm prensibine göre çalışırlar. Bu tip algılayıcılar Manyetik endüktif sensörlerin (Bobin) aksine minyatürizasyon için çok daha
䄀 欀 愀 礀 䌀 愀 搀 搀 攀 猀 椀 一 漀 㨀 㘀 㐀 㔀 㜀 㤀 㜀 㠀 眀 眀 礀 攀 渀 椀 漀 琀 漀 洀 漀 琀 椀 瘀 挀 漀 洀 眀 眀 礀 攀 渀 椀 洀 愀 稀 搀 愀 挀 漀 洀
 䄀 欀 愀 礀 䌀 愀 搀 搀 攀 猀 椀 一 漀 㨀 㘀 㐀 䜀 愀 稀 椀 攀 洀 椀 爀 Ⰰ 娀 䴀 刀 アハ ート 㔀 㐀 㔀 㜀 㤀 㜀 㠀 アハ ート 㘀 㐀 アハ ート 㔀 椀 渀 昀 漀 䀀 礀 攀 渀 椀 漀 琀 漀 洀 漀 琀 椀 瘀 挀 漀 洀 眀 眀 礀 攀 渀 椀 洀 愀 稀 搀 愀 挀 漀 洀 眀 眀 礀 攀 渀 椀 漀 琀 漀 洀 漀 琀 椀 瘀 挀 漀 洀 眀 眀 洀
䄀 欀 愀 礀 䌀 愀 搀 搀 攀 猀 椀 一 漀 㨀 㘀 㐀 䜀 愀 稀 椀 攀 洀 椀 爀 Ⰰ 娀 䴀 刀 アハ ート 㔀 㐀 㔀 㜀 㤀 㜀 㠀 アハ ート 㘀 㐀 アハ ート 㔀 椀 渀 昀 漀 䀀 礀 攀 渀 椀 漀 琀 漀 洀 漀 琀 椀 瘀 挀 漀 洀 眀 眀 礀 攀 渀 椀 洀 愀 稀 搀 愀 挀 漀 洀 眀 眀 礀 攀 渀 椀 漀 琀 漀 洀 漀 琀 椀 瘀 挀 漀 洀 眀 眀 洀
PCC 6505 PROFILE CUTTING LINE
 PCC 6505 PROFILE CUTTING LINE 1.DESCRIPTION PCC 6505 is a servo controlled machine which is specifically designed for the serial cutting of any kind of PVC and aluminum s in the market. The machine is
PCC 6505 PROFILE CUTTING LINE 1.DESCRIPTION PCC 6505 is a servo controlled machine which is specifically designed for the serial cutting of any kind of PVC and aluminum s in the market. The machine is
Seri kablo bağlantısında Windows95/98/ME'ten Windows 2000'e bağlantı Windows95/98/ME - NT4 bağlantısına çok benzer.
 Seri kablo bağlantısında Windows95/98/ME'ten Windows 2000'e bağlantı Windows95/98/ME NT4 bağlantısına çok benzer. Direkt Kablo desteğini Windows95/98'e yükledikten sonra, Windows95 for Direct Cable Client
Seri kablo bağlantısında Windows95/98/ME'ten Windows 2000'e bağlantı Windows95/98/ME NT4 bağlantısına çok benzer. Direkt Kablo desteğini Windows95/98'e yükledikten sonra, Windows95 for Direct Cable Client
SolarBaba2015: Solar Energy Conference GÜNEŞ ÖLÇÜM ⁹Ü NEDİR? NEDEN / NASIL YAPILIR? İSKENDER KÖKEY, MSc Country Manager, Turkey
 SolarBaba2015: Solar Energy Conference GÜNEŞ ÖLÇÜM ⁹Ü NEDİR? NEDEN / NASIL YAPILIR? İSKENDER KÖKEY, MSc Country Manager, Turkey İÇERİK Kintech Engineering Hakkında Nereden Çıktı Güneş Ölçümü? Güneşlenme
SolarBaba2015: Solar Energy Conference GÜNEŞ ÖLÇÜM ⁹Ü NEDİR? NEDEN / NASIL YAPILIR? İSKENDER KÖKEY, MSc Country Manager, Turkey İÇERİK Kintech Engineering Hakkında Nereden Çıktı Güneş Ölçümü? Güneşlenme
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY
 EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
Hakkımızda / About Us... Tunç Makina 1980'den günümüze imal ettiği Eksantrik Presler de kullanmış olduğu,kaliteli malzemelerle imalatını uygulayarak,k
 Hakkımızda / About Us... Tunç Makina 1980'den günümüze imal ettiği Eksantrik Presler de kullanmış olduğu,kaliteli malzemelerle imalatını uygulayarak,kendi alanında daima en iyiyi amaç edinmiştir. Kaliteli
Hakkımızda / About Us... Tunç Makina 1980'den günümüze imal ettiği Eksantrik Presler de kullanmış olduğu,kaliteli malzemelerle imalatını uygulayarak,kendi alanında daima en iyiyi amaç edinmiştir. Kaliteli
 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 7 6 4 5 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 YOLUN EN GÜVENLİ YERİ Ürettiğimiz her Mazda aracı, güvenliğinizi korumak için tasarlanmış çeşitli akıllı
3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 7 6 4 5 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 YOLUN EN GÜVENLİ YERİ Ürettiğimiz her Mazda aracı, güvenliğinizi korumak için tasarlanmış çeşitli akıllı
Pacific LED Green Parking combine safety with savings
 Lighting Pacific LED Green Parking combine safety with savings Pacific LED Green Parking Lighting is needed in parking garages to provide safety and guidance. However, because it is not possible to predict
Lighting Pacific LED Green Parking combine safety with savings Pacific LED Green Parking Lighting is needed in parking garages to provide safety and guidance. However, because it is not possible to predict
IDENTITY MANAGEMENT FOR EXTERNAL USERS
 1/11 Sürüm Numarası Değişiklik Tarihi Değişikliği Yapan Erman Ulusoy Açıklama İlk Sürüm IDENTITY MANAGEMENT FOR EXTERNAL USERS You can connect EXTERNAL Identity Management System (IDM) with https://selfservice.tai.com.tr/
1/11 Sürüm Numarası Değişiklik Tarihi Değişikliği Yapan Erman Ulusoy Açıklama İlk Sürüm IDENTITY MANAGEMENT FOR EXTERNAL USERS You can connect EXTERNAL Identity Management System (IDM) with https://selfservice.tai.com.tr/
MEKATRONİĞİN TEMELLERİ
 MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
Görev Unvanı Alan Üniversite Yıl Prof. Dr. Elek.-Eln Müh. Çukurova Üniversitesi Eylül 2014
 ÖZGEÇMİŞ 1. Adı Soyadı : MUSTAFA GÖK 2. Doğum Tarihi: : 1972 3. Unvanı : Prof. Dr. 4. Öğrenim Durumu Derece Alan Üniversite Yıl Lisans Elektronik Mühendisliği İstanbul Üniversitesi 1995 Yüksek Lisans Electrical
ÖZGEÇMİŞ 1. Adı Soyadı : MUSTAFA GÖK 2. Doğum Tarihi: : 1972 3. Unvanı : Prof. Dr. 4. Öğrenim Durumu Derece Alan Üniversite Yıl Lisans Elektronik Mühendisliği İstanbul Üniversitesi 1995 Yüksek Lisans Electrical
İŞLETMELERDE KURUMSAL İMAJ VE OLUŞUMUNDAKİ ANA ETKENLER
 ANKARA ÜNİVERSİTESİ SOSYAL BİLİMLER ENSTİTÜSÜ HALKLA İLİŞKİLER VE TANITIM ANA BİLİM DALI İŞLETMELERDE KURUMSAL İMAJ VE OLUŞUMUNDAKİ ANA ETKENLER BİR ÖRNEK OLAY İNCELEMESİ: SHERATON ANKARA HOTEL & TOWERS
ANKARA ÜNİVERSİTESİ SOSYAL BİLİMLER ENSTİTÜSÜ HALKLA İLİŞKİLER VE TANITIM ANA BİLİM DALI İŞLETMELERDE KURUMSAL İMAJ VE OLUŞUMUNDAKİ ANA ETKENLER BİR ÖRNEK OLAY İNCELEMESİ: SHERATON ANKARA HOTEL & TOWERS
CHARACTERISTICS UNITY KENAR KONTROL CİHAZI (UEC01) KULLANIM KLAVUZU GENEL ÖZELLİKLER UNITY EDGE CONTROL DEVICE (UEC01) USER S MANUAL
 KULLANIM KLAVUZU GENEL ÖZELLİKLER UNITY EDGE CONTROL DEVICE (UEC01) USER S MANUAL") UNITY KENAR KONTROL CİHAZI (UEC01) KULLANIM KLAVUZU UNITY EDGE CONTROL DEVICE (UEC01) USER S MANUAL GENEL ÖZELLİKLER Mikroişlemci tabanlı Yüksek hassasiyet Otomatik merkezleme özelliği Sabit hız, sensöre
UNITY KENAR KONTROL CİHAZI (UEC01) KULLANIM KLAVUZU UNITY EDGE CONTROL DEVICE (UEC01) USER S MANUAL GENEL ÖZELLİKLER Mikroişlemci tabanlı Yüksek hassasiyet Otomatik merkezleme özelliği Sabit hız, sensöre
ELEKTRONİK KONTROLLÜ YÖNLENDİRME SİSTEMİ
 ELEKTRONİK KONTROLLÜ YÖNLENDİRME SİSTEMİ Ali ÇAVDAR 1 Abdullah DEMİR 2 ÖZET Otomobil üreticileri gelişmiş yönlendirme kontrollü, sürüş ve yol tutum özelliklerine sahip direksiyon sistemlerini üretmek için
ELEKTRONİK KONTROLLÜ YÖNLENDİRME SİSTEMİ Ali ÇAVDAR 1 Abdullah DEMİR 2 ÖZET Otomobil üreticileri gelişmiş yönlendirme kontrollü, sürüş ve yol tutum özelliklerine sahip direksiyon sistemlerini üretmek için
THE DESIGN AND USE OF CONTINUOUS GNSS REFERENCE NETWORKS. by Özgür Avcı B.S., Istanbul Technical University, 2003
 THE DESIGN AND USE OF CONTINUOUS GNSS REFERENCE NETWORKS by Özgür Avcı B.S., Istanbul Technical University, 2003 Submitted to the Kandilli Observatory and Earthquake Research Institute in partial fulfillment
THE DESIGN AND USE OF CONTINUOUS GNSS REFERENCE NETWORKS by Özgür Avcı B.S., Istanbul Technical University, 2003 Submitted to the Kandilli Observatory and Earthquake Research Institute in partial fulfillment
00322 ELECTRICAL MACHINES-II Midterm Exam
 Name : ID : Signature : 00322 ELECTRICAL MACHINES-II Midterm Exam 20.04.2017 S.1) S.2) S.3) S.4) A shunt DC motor is rated 7.5kW, 250 V and is connected to 230V source. The armature resistance is Ra 0.2,
Name : ID : Signature : 00322 ELECTRICAL MACHINES-II Midterm Exam 20.04.2017 S.1) S.2) S.3) S.4) A shunt DC motor is rated 7.5kW, 250 V and is connected to 230V source. The armature resistance is Ra 0.2,
Eco 338 Economic Policy Week 4 Fiscal Policy- I. Prof. Dr. Murat Yulek Istanbul Ticaret University
 Eco 338 Economic Policy Week 4 Fiscal Policy- I Prof. Dr. Murat Yulek Istanbul Ticaret University Aggregate Demand Aggregate (domestic) demand (or domestic absorption) is the sum of consumption, investment
Eco 338 Economic Policy Week 4 Fiscal Policy- I Prof. Dr. Murat Yulek Istanbul Ticaret University Aggregate Demand Aggregate (domestic) demand (or domestic absorption) is the sum of consumption, investment
EEM 452 Sayısal Kontrol Sistemleri /
 EEM 452 Sayısal Kontrol Sistemleri / Yrd. Doç. Dr. Rıfat HACIOĞLU Bahar 2016 257 4010-1625, hacirif@beun.edu.tr EEM452 Sayısal Kontrol Sistemleri (3+0+3) Zamanda Ayrık Sistemlerine Giriş. Sinyal değiştirme,
EEM 452 Sayısal Kontrol Sistemleri / Yrd. Doç. Dr. Rıfat HACIOĞLU Bahar 2016 257 4010-1625, hacirif@beun.edu.tr EEM452 Sayısal Kontrol Sistemleri (3+0+3) Zamanda Ayrık Sistemlerine Giriş. Sinyal değiştirme,
1. YARIYIL / SEMESTER 1 2. YARIYIL / SEMESTER 2
 T.C. NECMETTİN ERBAKAN ÜNİVERSİTESİ MÜHENDİSLİK VE MİMARLIK FAKÜLTESİ, ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ, 2017-2018 AKADEMİK YILI ÖĞRETİM PLANI T.C. NECMETTIN ERBAKAN UNIVERSITY ENGINEERING AND ARCHITECTURE
T.C. NECMETTİN ERBAKAN ÜNİVERSİTESİ MÜHENDİSLİK VE MİMARLIK FAKÜLTESİ, ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ, 2017-2018 AKADEMİK YILI ÖĞRETİM PLANI T.C. NECMETTIN ERBAKAN UNIVERSITY ENGINEERING AND ARCHITECTURE
Gömülü Sistemler. (Embedded Systems)
") Gömülü Sistemler (Embedded Systems) Tanım Gömülü Sistem (Embedded System): Programlanabilir bilgisayar içeren fakat kendisi genel amaçlı bilgisayar olmayan her türlü cihazdır. Gömülü Sistem (Embedded System):
Gömülü Sistemler (Embedded Systems) Tanım Gömülü Sistem (Embedded System): Programlanabilir bilgisayar içeren fakat kendisi genel amaçlı bilgisayar olmayan her türlü cihazdır. Gömülü Sistem (Embedded System):
ELEKTRONİK ALTERNATİF YAKIT SİSTEMLERİ SAN TİC LTD ŞTİ KE 013-B BENZİN SİMULATÖR ( B TİPİ ) PETROL TANK SIMULATOR ( B TYPE )
 PETROL TANK SIMULATOR ( B TYPE )") ELEKTRONİK ALTERNATİF YAKIT SİSTEMLERİ SAN TİC LTD ŞTİ BENZİN SİMULATÖR ( B TİPİ ) PETROL TANK SIMULATOR ( B TYPE ) Kod: Montaj Talimatları ŞEMA 1 BENZİN ENJEKSİYON POMPASI KONNEKTÖRÜ BENZİN SİMÜLATÖRÜ
ELEKTRONİK ALTERNATİF YAKIT SİSTEMLERİ SAN TİC LTD ŞTİ BENZİN SİMULATÖR ( B TİPİ ) PETROL TANK SIMULATOR ( B TYPE ) Kod: Montaj Talimatları ŞEMA 1 BENZİN ENJEKSİYON POMPASI KONNEKTÖRÜ BENZİN SİMÜLATÖRÜ
Keyestudio SHT31 Temperature and Humidity Module / SHT31 Sıcaklık ve Nem Modülü
 Keyestudio SHT31 Temperature and Humidity Module / SHT31 Sıcaklık ve Nem Modülü Overview / Genel Bakış This module mainly uses the SHT31 temperature and humidity sensor, which belongs to the SHT3X series
Keyestudio SHT31 Temperature and Humidity Module / SHT31 Sıcaklık ve Nem Modülü Overview / Genel Bakış This module mainly uses the SHT31 temperature and humidity sensor, which belongs to the SHT3X series
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür ksengur@firat.edu.tr
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
D-Link DSL 500G için ayarları
 Celotex 4016 YAZILIM 80-8080-8081 İLDVR HARDWARE YAZILIM 80-4500-4600 DVR2000 25 FPS YAZILIM 5050-5555-1999-80 EX-3004 YAZILIM 5555 DVR 8008--9808 YAZILIM 80-9000-9001-9002 TE-203 VE TE-20316 SVDVR YAZILIM
Celotex 4016 YAZILIM 80-8080-8081 İLDVR HARDWARE YAZILIM 80-4500-4600 DVR2000 25 FPS YAZILIM 5050-5555-1999-80 EX-3004 YAZILIM 5555 DVR 8008--9808 YAZILIM 80-9000-9001-9002 TE-203 VE TE-20316 SVDVR YAZILIM
Politeknik Dergisi, 2017; 20 (1) : Journal of Polytechnic, 2017; 20 (1) : Hasan ŞAHİN
 : Journal of Polytechnic, 2017; 20 (1) : Hasan ŞAHİN") Politeknik Dergisi, 2017; 20 (1) : 205-210 Journal of Polytechnic, 2017; 20 (1) : 205-210 Adaptif Hız Kontrol (AHK) Sistemindeki Mesafe Kontrol Sisteminin Sabit Mesafe Ve Sabit Zaman Yöntemleriyle Uygulamalı
Politeknik Dergisi, 2017; 20 (1) : 205-210 Journal of Polytechnic, 2017; 20 (1) : 205-210 Adaptif Hız Kontrol (AHK) Sistemindeki Mesafe Kontrol Sisteminin Sabit Mesafe Ve Sabit Zaman Yöntemleriyle Uygulamalı
CNC MACH breakout board user manual V8 type
 CNC MACH breakout board user manual V8 type 1 Catalogue CNC Router breakout board V8 type user manual... Hata! Yer işareti tanımlanmamış. 1) Brief introduction:...3 2) Breakout board drawing:...4 3) Wiring:...5
CNC MACH breakout board user manual V8 type 1 Catalogue CNC Router breakout board V8 type user manual... Hata! Yer işareti tanımlanmamış. 1) Brief introduction:...3 2) Breakout board drawing:...4 3) Wiring:...5
Hasan Esen ZKÜ FEN BİL. ENST. MAKİNE EĞT.BL. ÖĞRENCİSİ 2000 0281 07 007
 Hasan Esen ZKÜ FEN BİL. ENST. MAKİNE EĞT.BL. ÖĞRENCİSİ 2000 0281 07 007 I.GİRİŞ Motorlu araç frenleri alanındaki gelişme, taşıtları değişik sürüş koşullarında mümkün olan en iyi şekilde frenleyebilen verimli,
Hasan Esen ZKÜ FEN BİL. ENST. MAKİNE EĞT.BL. ÖĞRENCİSİ 2000 0281 07 007 I.GİRİŞ Motorlu araç frenleri alanındaki gelişme, taşıtları değişik sürüş koşullarında mümkün olan en iyi şekilde frenleyebilen verimli,
Tekirdağ&Ziraat&Fakültesi&Dergisi&
 NamıkKemalÜniversitesi ISSN:1302*7050 TekirdağZiraatFakültesiDergisi JournalofTekirdagAgriculturalFaculty AnInternationalJournalofallSubjectsofAgriculture Cilt/Volume:11Sayı/Number:1Yıl/Year:2014 Sahibi/Owner
NamıkKemalÜniversitesi ISSN:1302*7050 TekirdağZiraatFakültesiDergisi JournalofTekirdagAgriculturalFaculty AnInternationalJournalofallSubjectsofAgriculture Cilt/Volume:11Sayı/Number:1Yıl/Year:2014 Sahibi/Owner
Giyilebilir Teknolojiler ve Solar Enerjili Şapka Uygulaması
 Giyilebilir Teknolojiler ve Solar Enerjili Şapka Uygulaması 1 Necip Fazıl Bilgin, 2 Bülent Çobanoğlu and 3 Fatih Çelik 2 Faculty of Technology, Department of Mechatronic Engineering, Sakarya University,
Giyilebilir Teknolojiler ve Solar Enerjili Şapka Uygulaması 1 Necip Fazıl Bilgin, 2 Bülent Çobanoğlu and 3 Fatih Çelik 2 Faculty of Technology, Department of Mechatronic Engineering, Sakarya University,
AĞIR YAĞ SIVI YAKIT BRÜLÖRLERİ FUEL OIL BURNERS
 SIVI YAKIT BRÜLÖRLERİ BURNERS Doğru seçimle başlamak Starting the right selection ÜRET Hafif ve Orta Yağ Brülörleri 3 525 KG/h TSE EN 267+A1 ye uygun olarak üretilen yüksek basınçlı ve püskürtmeli, üflemeli
SIVI YAKIT BRÜLÖRLERİ BURNERS Doğru seçimle başlamak Starting the right selection ÜRET Hafif ve Orta Yağ Brülörleri 3 525 KG/h TSE EN 267+A1 ye uygun olarak üretilen yüksek basınçlı ve püskürtmeli, üflemeli
AKILLI SERA PROJESĐ SMART GREENHOUSE PROJECT
 SĐNOP ÜNĐVERSĐTESĐ MESLEK YÜKSEKOKULU MEKATRONĐK PROGRAMI AKILLI SERA PROJESĐ SMART GREENHOUSE PROJECT Proje Yürütücüleri Ömer ALTUNDAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP Ebulcihat
SĐNOP ÜNĐVERSĐTESĐ MESLEK YÜKSEKOKULU MEKATRONĐK PROGRAMI AKILLI SERA PROJESĐ SMART GREENHOUSE PROJECT Proje Yürütücüleri Ömer ALTUNDAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP Ebulcihat
FATMA KANCA. Derece Alan Üniversite Yıl Doktora Matematik Gebze Yüksek Teknoloji Enstitüsü Yüksek Lisans Matematik Kocaeli Üniversitesi 2004
 FATMA KANCA EĞİTİM Derece Alan Üniversite Yıl Doktora Matematik Gebze Yüksek Teknoloji Enstitüsü 2011 Yüksek Lisans Matematik Kocaeli 2004 Lisans Matematik Kocaeli 2001 AKADEMİK UNVANLAR Kurum/Kuruluş
FATMA KANCA EĞİTİM Derece Alan Üniversite Yıl Doktora Matematik Gebze Yüksek Teknoloji Enstitüsü 2011 Yüksek Lisans Matematik Kocaeli 2004 Lisans Matematik Kocaeli 2001 AKADEMİK UNVANLAR Kurum/Kuruluş
Esenklik PART I INTRODUCTION TO ECONOMICS. Prepared by: Fernando & Yvonn Quijano
 PART I INTRODUCTION TO ECONOMICS Esenklik 5 Prepared by: Fernando & Yvonn Quijano 2009 Pearson Education, Inc. Publishing as Prentice Hall Principles of Economics 9e by Case, Fair and Oster PART I INTRODUCTION
PART I INTRODUCTION TO ECONOMICS Esenklik 5 Prepared by: Fernando & Yvonn Quijano 2009 Pearson Education, Inc. Publishing as Prentice Hall Principles of Economics 9e by Case, Fair and Oster PART I INTRODUCTION
NES DC.DRV.200 Tanıtım Dokümanı
 NES DC.DRV.00 Tanıtım Dokümanı 10.08.016 Giri Tasarım ve yazılım faaliyetleri tamamen yerli olarak firmamız tarafından gerçekle tirilen Endüstriyel DC motorlar için geli tirilmi mikroi lemci kontrollü
NES DC.DRV.00 Tanıtım Dokümanı 10.08.016 Giri Tasarım ve yazılım faaliyetleri tamamen yerli olarak firmamız tarafından gerçekle tirilen Endüstriyel DC motorlar için geli tirilmi mikroi lemci kontrollü
ÖZET OTOMATİK KÖKLENDİRME SİSTEMİNDE ORTAM NEMİNİN SENSÖRLERLE HASSAS KONTROLÜ. Murat ÇAĞLAR
 vii ÖZET OTOMATİK KÖKLENDİRME SİSTEMİNDE ORTAM NEMİNİN SENSÖRLERLE HASSAS KONTROLÜ Murat ÇAĞLAR Yüksek Lisans Tezi, Tarım Makinaları Anabilim Dalı Tez Danışmanı: Doç. Dr. Saadettin YILDIRIM 2014, 65 sayfa
vii ÖZET OTOMATİK KÖKLENDİRME SİSTEMİNDE ORTAM NEMİNİN SENSÖRLERLE HASSAS KONTROLÜ Murat ÇAĞLAR Yüksek Lisans Tezi, Tarım Makinaları Anabilim Dalı Tez Danışmanı: Doç. Dr. Saadettin YILDIRIM 2014, 65 sayfa
Arýza Giderme. Troubleshooting
 Arýza Giderme Sorun Olasý Nedenler Giriþ Gerilimi düþük hata mesajý Þebeke giriþ gerilimi alt seviyenin altýnda geliyor Þebeke giriþ gerilimi tehlikeli derecede Yüksek geliyor Regülatör kontrol kartý hatasý
Arýza Giderme Sorun Olasý Nedenler Giriþ Gerilimi düþük hata mesajý Þebeke giriþ gerilimi alt seviyenin altýnda geliyor Þebeke giriþ gerilimi tehlikeli derecede Yüksek geliyor Regülatör kontrol kartý hatasý
PowerBalance gen2 sustainable performance
 Lighting sustainable performance When it comes to lighting an office space with LED luminaires, people are usually willing to invest in sustainability provided the investment pays back. At the same time,
Lighting sustainable performance When it comes to lighting an office space with LED luminaires, people are usually willing to invest in sustainability provided the investment pays back. At the same time,
Elektrikli Aktütör Bağlantı Şemaları
 Elektrikli Aktütör Bağlantı Şemaları Elektrik Şeması / Wiring Diagram O / OFF Type for 0 / 220 V AC O.. FB CS Tam açık uyarı (lamba) Fully open indicator (lamp) Tam kapalı uyarı (lamba) Fully closed indicator
Elektrikli Aktütör Bağlantı Şemaları Elektrik Şeması / Wiring Diagram O / OFF Type for 0 / 220 V AC O.. FB CS Tam açık uyarı (lamba) Fully open indicator (lamp) Tam kapalı uyarı (lamba) Fully closed indicator
Teknoloji Servisleri; (Technology Services)
") Antalya International University Teknoloji Servisleri; (Technology Services) Microsoft Ofis Yazılımları (Microsoft Office Software), How to Update Office 365 User Details How to forward email in Office
Antalya International University Teknoloji Servisleri; (Technology Services) Microsoft Ofis Yazılımları (Microsoft Office Software), How to Update Office 365 User Details How to forward email in Office
PACKAGE STITCHING SYSTEMS KOLİ DİKİŞ SİSTEMLERİ. MAKİNA SAN.TİC.LTD.ŞTİ KOLİ DİKİŞ MAKİNALARI ve DİKİŞ TELİ İMALATI GÜVENİLİR ÜRETİMDE DOĞRU TERCİH
 MAKİNA SAN.TİC.LTD.ŞTİ KOLİ DİKİŞ MAKİNALARI ve DİKİŞ TELİ İMALATI GÜVENİLİR ÜRETİMDE DOĞRU TERCİH RIGHT CHOICE IN SAFE PRODUCTION PACKAGE STITCHING SYSTEMS Esas Olan Bize Olan Güveniniz What is Essential
MAKİNA SAN.TİC.LTD.ŞTİ KOLİ DİKİŞ MAKİNALARI ve DİKİŞ TELİ İMALATI GÜVENİLİR ÜRETİMDE DOĞRU TERCİH RIGHT CHOICE IN SAFE PRODUCTION PACKAGE STITCHING SYSTEMS Esas Olan Bize Olan Güveniniz What is Essential
TASARSIZ TAŞIT AĞLARI (VEHICULAR AD HOC NETWORKS)
") TASARSIZ TAŞIT AĞLARI (VEHICULAR AD HOC NETWORKS) VEHICULAR AD HOC NETWORKS - VANETs VANET, MANET'in bir uygulama alanı olarak düşünülebilir. Temel amaç yol güvenliği ve yolcuların konforu. VANET, araçlar
TASARSIZ TAŞIT AĞLARI (VEHICULAR AD HOC NETWORKS) VEHICULAR AD HOC NETWORKS - VANETs VANET, MANET'in bir uygulama alanı olarak düşünülebilir. Temel amaç yol güvenliği ve yolcuların konforu. VANET, araçlar
SAYISAL İŞARET İŞLEME. M. Kemal GÜLLÜ
 SAYISAL İŞARET İŞLEME M. Kemal GÜLLÜ İçerik Giriş Ayrık Zamanlı İşaretler Ayrık Zamanlı Sistemler İşaret ve Sistemlerin Frekans Uzayı Analizi Sürekli Zaman İşaretlerin Ayrık Zamanlı İşlenmesi İşaret ve
SAYISAL İŞARET İŞLEME M. Kemal GÜLLÜ İçerik Giriş Ayrık Zamanlı İşaretler Ayrık Zamanlı Sistemler İşaret ve Sistemlerin Frekans Uzayı Analizi Sürekli Zaman İşaretlerin Ayrık Zamanlı İşlenmesi İşaret ve
Konforun Üç Bilinmeyenli Denklemi 2016
 Mimari olmadan akustik, akustik olmadan da mimarlık olmaz! Mimari ve akustik el ele gider ve ben genellikle iyi akustik görülmek için orada değildir, mimarinin bir parçası olmalı derim. x: akustik There
Mimari olmadan akustik, akustik olmadan da mimarlık olmaz! Mimari ve akustik el ele gider ve ben genellikle iyi akustik görülmek için orada değildir, mimarinin bir parçası olmalı derim. x: akustik There
MODÜL-13 ÖRNEK SORULAR. 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir?
 MODÜL-13 ÖRNEK SORULAR 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir? A) Kanatçık (aileron) B) İrtifa dümeni (elevator) C) Flap 2. Kanadın üst yüzeyinde; A) Basınç artar, hız
MODÜL-13 ÖRNEK SORULAR 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir? A) Kanatçık (aileron) B) İrtifa dümeni (elevator) C) Flap 2. Kanadın üst yüzeyinde; A) Basınç artar, hız
ORANSAL GAZ BRÜLÖRLERİ MODULATED GAS BURNERS
 GAZ BRÜLÖRLERİ MODULATED GAS BURNERS Doğru seçimle başlamak Starting the right selection ÜRET GAZ BRÜLÖRLERİ 30 7500 kw TS EN 676 + A2 çerçevesinde CE 1312 sertifikasyonu ile üretilen üflemeli tip Üret
GAZ BRÜLÖRLERİ MODULATED GAS BURNERS Doğru seçimle başlamak Starting the right selection ÜRET GAZ BRÜLÖRLERİ 30 7500 kw TS EN 676 + A2 çerçevesinde CE 1312 sertifikasyonu ile üretilen üflemeli tip Üret
Optik Filtrelerde Performans Analizi Performance Analysis of the Optical Filters
 Optik Filtrelerde Performans Analizi Performance Analysis of the Optical Filters Gizem Pekküçük, İbrahim Uzar, N. Özlem Ünverdi Elektronik ve Haberleşme Mühendisliği Bölümü Yıldız Teknik Üniversitesi gizem.pekkucuk@gmail.com,
Optik Filtrelerde Performans Analizi Performance Analysis of the Optical Filters Gizem Pekküçük, İbrahim Uzar, N. Özlem Ünverdi Elektronik ve Haberleşme Mühendisliği Bölümü Yıldız Teknik Üniversitesi gizem.pekkucuk@gmail.com,
TEK BÖLGELİ GÜÇ SİSTEMLERİNDE BULANIK MANTIK İLE YÜK FREKANS KONTRÜLÜ
 TEKNOLOJİ, Yıl 5, (2002), Sayı 3-4, 73-77 TEKNOLOJİ TEK BÖLGELİ GÜÇ SİSTEMLERİNDE BULANIK MANTIK İLE YÜK FREKANS KONTRÜLÜ Ertuğrul ÇAM İlhan KOCAARSLAN Kırıkkale Üniversitesi, Mühendislik Fakültesi, Elektrik-Elektronik
TEKNOLOJİ, Yıl 5, (2002), Sayı 3-4, 73-77 TEKNOLOJİ TEK BÖLGELİ GÜÇ SİSTEMLERİNDE BULANIK MANTIK İLE YÜK FREKANS KONTRÜLÜ Ertuğrul ÇAM İlhan KOCAARSLAN Kırıkkale Üniversitesi, Mühendislik Fakültesi, Elektrik-Elektronik
1 I S L U Y G U L A M A L I İ K T İ S A T _ U Y G U L A M A ( 5 ) _ 3 0 K a s ı m
 _ 3 0 K a s ı m") 1 I S L 8 0 5 U Y G U L A M A L I İ K T İ S A T _ U Y G U L A M A ( 5 ) _ 3 0 K a s ı m 2 0 1 2 CEVAPLAR 1. Tekelci bir firmanın sabit bir ortalama ve marjinal maliyet ( = =$5) ile ürettiğini ve =53 şeklinde
1 I S L 8 0 5 U Y G U L A M A L I İ K T İ S A T _ U Y G U L A M A ( 5 ) _ 3 0 K a s ı m 2 0 1 2 CEVAPLAR 1. Tekelci bir firmanın sabit bir ortalama ve marjinal maliyet ( = =$5) ile ürettiğini ve =53 şeklinde
e-tartı LTR3 Firmware Upgrade Yazılım Güncelleme Moduler Connection LTR3 Firmware Upgrade / LTR3 Yazılım Güncelleme v1.0.
 e-tartı LTR3 Firmware Upgrade Yazılım Güncelleme Moduler Connection www.etarti.com LTR3 Firmware Upgrade / LTR3 Yazılım Güncelleme v1.0.0 1 LTR3 Firmware Upgrade / LTR3 Yazılım Güncelleme v1.0.0 2 Contents
e-tartı LTR3 Firmware Upgrade Yazılım Güncelleme Moduler Connection www.etarti.com LTR3 Firmware Upgrade / LTR3 Yazılım Güncelleme v1.0.0 1 LTR3 Firmware Upgrade / LTR3 Yazılım Güncelleme v1.0.0 2 Contents
Wick Drain. Machines - 7 -
 Wick Drain - 6 - Wick Drain Machines It is applied in ground improving projects in construction areas in order to provide a vertical drainage for undersoil water. Wick drain is specially designed to lay
Wick Drain - 6 - Wick Drain Machines It is applied in ground improving projects in construction areas in order to provide a vertical drainage for undersoil water. Wick drain is specially designed to lay
DETERMINING BRAKE PERFORMANCE BY ANALYZING BRAKE PRESSURE DATA IN VEHICLES WITH ABS
 5. Uluslar arası İleri Teknolojiler Sempozyumu (İATS 09), 13-15 Mayıs 2009, Karabük, Türkiye ABS (ANTİ-LOCK BRAKE SYSTEM) KULLANILAN TAŞITLARDA FREN BASINÇ VERİ ANALİZİ YAPILARAK FREN PERFORMANSININ BELİRLENMESİ
5. Uluslar arası İleri Teknolojiler Sempozyumu (İATS 09), 13-15 Mayıs 2009, Karabük, Türkiye ABS (ANTİ-LOCK BRAKE SYSTEM) KULLANILAN TAŞITLARDA FREN BASINÇ VERİ ANALİZİ YAPILARAK FREN PERFORMANSININ BELİRLENMESİ
Basınç farkı=çalışma basıncı (PA,B)-Şarj basıncı (PSp)+Güvenlik payı Ayar Diyagramı
-Şarj basıncı (PSp)+Güvenlik payı Ayar Diyagramı") 1 Pistonlu pompa ve motorlarla sağlanacak hidrostatik tahrik aracın sürüşünde birçok avantaj getirmektedir. İyi bir sürüş konforu ve yüksek çalışma hızı yönündeki talepler hidrostatik tahrikle çalışan
1 Pistonlu pompa ve motorlarla sağlanacak hidrostatik tahrik aracın sürüşünde birçok avantaj getirmektedir. İyi bir sürüş konforu ve yüksek çalışma hızı yönündeki talepler hidrostatik tahrikle çalışan
15H. 17 Otomatik şerit algılama sistemi, durum. 18 Uyarı mesajları çıkışı, talep 14K. 3 Kombi şalter, durum
 Uç 5, durum 3E 0 Direksiyon kolonu ayarı şalteri, durum 0 Direksiyon kolonu ayarı şalteri, durum TEMPOMAT kolu, sinyal 4G TEMPOMAT kolu, sinyal 4H 4J J 4G 23D 22D 24D 22D 6 Direksiyon simidi titreme motoru,
Uç 5, durum 3E 0 Direksiyon kolonu ayarı şalteri, durum 0 Direksiyon kolonu ayarı şalteri, durum TEMPOMAT kolu, sinyal 4G TEMPOMAT kolu, sinyal 4H 4J J 4G 23D 22D 24D 22D 6 Direksiyon simidi titreme motoru,
ASANSÖR KONTROLÜNDE YENİ DÖNEM NEW ERA IN LIFT CONTROL
 ASANSÖR KONTROLÜNDE YENİ DÖNEM NEW ERA IN LIFT CONTROL MONOBLOK ASANSÖR KONTROL ÜNİTESİ MONOBLOCK LIFT CONTROL UNIT Arcube, ihtiyaçlarınızı kusursuz bir şekilde karşılar! VVVF sürücü, kontrol kartı, kurtarma
ASANSÖR KONTROLÜNDE YENİ DÖNEM NEW ERA IN LIFT CONTROL MONOBLOK ASANSÖR KONTROL ÜNİTESİ MONOBLOCK LIFT CONTROL UNIT Arcube, ihtiyaçlarınızı kusursuz bir şekilde karşılar! VVVF sürücü, kontrol kartı, kurtarma
Sirkülasyon Pompaları
 Sirkülasyon Pompaları Circulation Pumps Dünyayı koruyan teknolojilerle daha konforlu bir hayat için çalışıyoruz.. Dünyanın önde gelen markaları, uzmanları, bilim insanları ve profesyonel kadroları, gelişen
Sirkülasyon Pompaları Circulation Pumps Dünyayı koruyan teknolojilerle daha konforlu bir hayat için çalışıyoruz.. Dünyanın önde gelen markaları, uzmanları, bilim insanları ve profesyonel kadroları, gelişen
İŞLETİM SİSTEMİ İşletim sistemi kullanıcıyla bilgisayar donanımı arasında iletişim sağlayan programdır.
 İŞLETİM SİSTEMİ İşletim sistemi kullanıcıyla bilgisayar donanımı arasında iletişim sağlayan programdır. Programların ve donanımların kullanılması için bir çalıştırılması platformu oluşturur. Sistemin yazılım
İŞLETİM SİSTEMİ İşletim sistemi kullanıcıyla bilgisayar donanımı arasında iletişim sağlayan programdır. Programların ve donanımların kullanılması için bir çalıştırılması platformu oluşturur. Sistemin yazılım
APPLICATION QUESTIONNAIRE. Uygulama Soru Formu
 Dr.Bruno Lange GmbH & Co. KG Willstätter Str. 11 / 40549 Düsseldorf, Germany Phone : + 49 (0)211. 52. 88. 0 Fax : + 49 (0)211. 52. 88. 124 Email : anitsch@drlange.de, APPLICATION QUESTIONNAIRE Uygulama
Dr.Bruno Lange GmbH & Co. KG Willstätter Str. 11 / 40549 Düsseldorf, Germany Phone : + 49 (0)211. 52. 88. 0 Fax : + 49 (0)211. 52. 88. 124 Email : anitsch@drlange.de, APPLICATION QUESTIONNAIRE Uygulama
HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI
 HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI Emre SERT Anadolu Isuzu Otomotiv A.Ş 1. Giriş Özet Ticari araç kazalarının çoğu devrilme ile sonuçlanmaktadır bu nedenle devrilme
HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI Emre SERT Anadolu Isuzu Otomotiv A.Ş 1. Giriş Özet Ticari araç kazalarının çoğu devrilme ile sonuçlanmaktadır bu nedenle devrilme
BOĞAZİÇİ UNIVERSITY KANDİLLİ OBSERVATORY and EARTHQUAKE RESEARCH INSTITUTE GEOMAGNETISM LABORATORY
 Monthly Magnetic Bulletin May 2015 BOĞAZİÇİ UNIVERSITY KANDİLLİ OBSERVATORY and EARTHQUAKE RESEARCH INSTITUTE GEOMAGNETISM LABORATORY http://www.koeri.boun.edu.tr/jeomanyetizma/ Magnetic Results from İznik
Monthly Magnetic Bulletin May 2015 BOĞAZİÇİ UNIVERSITY KANDİLLİ OBSERVATORY and EARTHQUAKE RESEARCH INSTITUTE GEOMAGNETISM LABORATORY http://www.koeri.boun.edu.tr/jeomanyetizma/ Magnetic Results from İznik
PROFESSIONAL DEVELOPMENT POLICY OPTIONS
 PROFESSIONAL DEVELOPMENT POLICY OPTIONS INTRODUCTION AND POLICY EXPLORATION IN RELATION TO PROFESSIONAL DEVELOPMENT FOR VET TEACHERS AND TRAINERS IN TURKEY JULIAN STANLEY, ETF ISTANBUL, FEBRUARY 2016 INTRODUCE
PROFESSIONAL DEVELOPMENT POLICY OPTIONS INTRODUCTION AND POLICY EXPLORATION IN RELATION TO PROFESSIONAL DEVELOPMENT FOR VET TEACHERS AND TRAINERS IN TURKEY JULIAN STANLEY, ETF ISTANBUL, FEBRUARY 2016 INTRODUCE
artık güç siz de! Now you have power! erdalozkanmakina.com
 artık güç siz de! Now you have power! ARABALI VİNÇ KEDİSİ Trolley Crane Hoist Özel Üretim Kaldırma Redüktörü Special Edition Lifting GearBox Elektro Manyetik Fren ElectroMagnetic Brake FEM Standartlarına
artık güç siz de! Now you have power! ARABALI VİNÇ KEDİSİ Trolley Crane Hoist Özel Üretim Kaldırma Redüktörü Special Edition Lifting GearBox Elektro Manyetik Fren ElectroMagnetic Brake FEM Standartlarına
Trend X. 8 İleri Otomatik Şanzıman ile Döner Vites Konsolu Direksiyondan kumandalı otomatik vites
 Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
OTOMOTİV SAN. TİC. LTD. ŞTİ. OTOMOTİV YEDEK PARÇA İMALATI AUTOMOTIVE SPARE PART MANUFACTURING
 OTOMOTİV SAN. TİC. LTD. ŞTİ. www.ozaksen.com.tr OTOMOTİV YEDEK PARÇA İMALATI AUTOMOTIVE SPARE PART MANUFACTURING ÜRÜNLERİMİZ OUR PRODUCTS INTERCOOL BAĞLANTI BORULARI INTERCOOL CONNECTION PIPES... 4 YAĞ
OTOMOTİV SAN. TİC. LTD. ŞTİ. www.ozaksen.com.tr OTOMOTİV YEDEK PARÇA İMALATI AUTOMOTIVE SPARE PART MANUFACTURING ÜRÜNLERİMİZ OUR PRODUCTS INTERCOOL BAĞLANTI BORULARI INTERCOOL CONNECTION PIPES... 4 YAĞ
Trend X. *Broşürde yer alan görseller ile pazara sunulan araçlar arasında donanımsal ve görsel açıdan farklılıklar olabilir.
 Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
TÜRKİYE NİN İLK VE TEK DİŞLİSİZ ÇİFT MOTORLU OTOMATİK KAPI SİSTEMİ
 TÜRKİYE NİN İLK VE TEK DİŞLİSİZ ÇİFT MOTORLU OTOMATİK KAPI SİSTEMİ TEKNİK ÖZELLİKLER 1- A Sınıfı Enerji Verimliliği A Class Energy Efficiency 2- İnce Mekanizma/Slim Mechanism Dar Alanlarda uygulama imkanı
TÜRKİYE NİN İLK VE TEK DİŞLİSİZ ÇİFT MOTORLU OTOMATİK KAPI SİSTEMİ TEKNİK ÖZELLİKLER 1- A Sınıfı Enerji Verimliliği A Class Energy Efficiency 2- İnce Mekanizma/Slim Mechanism Dar Alanlarda uygulama imkanı
Darbeli Kırıcılar Impact Crushers
 Darbeli Kırıcılar Impact Crushers TK15-TK16 Serisi Darbeli Kırıcılar TK15-TK16 Series Impact Crushers TK15 ve TK16 darbeli kırıcılar, tesiste sekonder veya tersiyer olarak kullanılabilir özellikte kırıcılardır.
Darbeli Kırıcılar Impact Crushers TK15-TK16 Serisi Darbeli Kırıcılar TK15-TK16 Series Impact Crushers TK15 ve TK16 darbeli kırıcılar, tesiste sekonder veya tersiyer olarak kullanılabilir özellikte kırıcılardır.
> what is ansible*? "infrastructure as code"
 > what is ansible*? "infrastructure as code" synthesis of; - configuration management, automation tools (Puppet, Chef, cfengine) - deployment tools (Capistrano, Fabric) - ad-hoc task execution tools (Func,
> what is ansible*? "infrastructure as code" synthesis of; - configuration management, automation tools (Puppet, Chef, cfengine) - deployment tools (Capistrano, Fabric) - ad-hoc task execution tools (Func,
Çözümleri TRAFİK ÖLÇÜM SİSTEMLERİ. İSBAK A.Ş., İstanbul Büyükşehir Belediyesi iştirakidir.
 Çözümleri TRAFİK ÖLÇÜM SİSTEMLERİ İSBAK A.Ş., İstanbul Büyükşehir Belediyesi iştirakidir. Trafik Ölçüm Sistemleri Akıllı Ulaşım Sistemleri nin temel bileşenlerinden biri olan trafik ölçüm dedektörleri;
Çözümleri TRAFİK ÖLÇÜM SİSTEMLERİ İSBAK A.Ş., İstanbul Büyükşehir Belediyesi iştirakidir. Trafik Ölçüm Sistemleri Akıllı Ulaşım Sistemleri nin temel bileşenlerinden biri olan trafik ölçüm dedektörleri;
1. YARIYIL / SEMESTER 1
 T.C. NECMETTİN ERBAKAN ÜNİVERSİTESİ MÜHENDİSLİK VE MİMARLIK FAKÜLTESİ, MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ, 2017-2018 AKADEMİK YILI ÖĞRETİM PLANI T.C. NECMETTIN ERBAKAN UNIVERSITY ENGINEERING AND ARCHITECTURE
T.C. NECMETTİN ERBAKAN ÜNİVERSİTESİ MÜHENDİSLİK VE MİMARLIK FAKÜLTESİ, MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ, 2017-2018 AKADEMİK YILI ÖĞRETİM PLANI T.C. NECMETTIN ERBAKAN UNIVERSITY ENGINEERING AND ARCHITECTURE
- GENEL TANITIM 2010 - Rofin Sinar Laser Kaynakları Endüstriyel Laser Kaynakları SC Serisi 135-600 Watt DC Serisi 1000 ~ 1500 Watt
 - GENEL TANITIM 2010 - Rofin Sinar Laser Kaynakları Endüstriyel Laser Kaynakları SC Serisi 135-600 Watt DC Serisi 1000 ~ 1500 Watt A ve A Türkiye Rofin Sinar Germany Endüstriyel Üretimin Profesyonel Tek
- GENEL TANITIM 2010 - Rofin Sinar Laser Kaynakları Endüstriyel Laser Kaynakları SC Serisi 135-600 Watt DC Serisi 1000 ~ 1500 Watt A ve A Türkiye Rofin Sinar Germany Endüstriyel Üretimin Profesyonel Tek
İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ ÖZET FONKSİYON TABANLI GÜVENLİ BİR RFID PROTOKOLÜNÜN FPGA ÜZERİNDE GERÇEKLENMESİ
 İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ ÖZET FONKSİYON TABANLI GÜVENLİ BİR RFID PROTOKOLÜNÜN FPGA ÜZERİNDE GERÇEKLENMESİ BİTİRME ÖDEVİ YUSUF GÖRÜM 040080379 Bölümü: Elektronik ve Haberleşme
İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ ÖZET FONKSİYON TABANLI GÜVENLİ BİR RFID PROTOKOLÜNÜN FPGA ÜZERİNDE GERÇEKLENMESİ BİTİRME ÖDEVİ YUSUF GÖRÜM 040080379 Bölümü: Elektronik ve Haberleşme