5.17. ARICILIK BENZETİM PROJESİ
|
|
|
- Duygu Kurtoğlu
- 8 yıl önce
- İzleme sayısı:
Transkript
1 5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal işletmelerde olduğu gibi iyi tohum aramak, gübre serpmek, tarla sürmek vb külfetli ve yorucu işleri yoktur. Lüzumsuz masraf yapmayarak, arılardan bal üretme yollarını bilmek lazımdır. Kovanlardan bal ve mum alındığı gibi, oğul ve ana arıları yetiştirmek ve bunları satarak para kazanmak mümkündür. Halk arasında Mayısta çıkan bir oğul, bol süt veren inek kıymetindedir sözü dolaşır. Mevsimi güzel geçen yıllarda ve çok çiçekli mevkilerde mayısta çıkan bir oğuldan kendisi gibi bir oğul alınacağı gibi, 50 kilo bal alınması dahi mümkündür. Haziranda çıkan oğula ise halk arasında Gümüş kaşık kıymetindedir ifadesi kullanılır. Balmumu ticareti dahi arıcılığın oldukça karlı işlerindendir. Gömeçleri eriterek balmumu çıkarmak ve suni gümeç yapmak için kurulmuş fabrikalar vardır. Bu otomasyon benzetim projesinin amacı, otomasyon tekniklerinin öğretilmesi ve arıcılıkta kullanılabilecek bir otomatik sistemin masa üstü robot seti ile montajı yapılarak, bilgisayarla kontrolünün nasıl yapılabileceğinin öğretilmesidir. 1671

2 1. SİSTEMİN ÇALIŞMASI Montajı gerçekleştirilen sistem, dört ana kısımdan oluşmaktadır. Sistemimizde kovan çeşidi olarak fenni kovan seçilmiştir. I. Kısım: Fenni kovanlar bandın üzerinden kayarak gelir. II. Kısım: Çerçeveyi çıkarmadan önce arıların sakinleşmesi için körükle duman verilir. III: Kısım: Körükleme işleminden belirli bir zaman sonra kovanın içinde bulunan çerçeve yukarıya doğru çıkarılmaya başlanır. IV. Kısım: Çerçeve yukarıya çıkarıldığı zaman üzerindeki bal mumlarında bulunan arıları, temizleme işlemi gerçekleştirilir. V. Kısım: Suni gümeç işlemi yapma (Isıtılarak balmumunu eritip süzme bal elde etme işlemi) VI. Kısım: getirilir. Balmumu eritildikten sonra sistem tekrar ilk konumuna 2. MALZEME SEÇİMİ Sistemimizde motorların kontrolleri genel olarak anahtarlarla yapılmaktadır. Kullanılan ana malzemelerin isimleri aşağıda verilmiştir. 1. MOTOR (5 ADET) 2. SWİCH (4 ADET) 3. DİŞLİ RAY 4. ARABİRİM 5. LEGO MONTAJ PARÇALARI 1672

3 3. İŞLEM BASAMAKLARI Sistemin şematik çizimi Şekil 1 de verilmiştir. Sistemin işlem basamakları, sırasıyla şöyle açıklanabilir. 1. Suni gümeç işlemi yapan kazan ile kovanları taşıyan bant arasındaki kızaklı robot kolu ilk aşamada kovanları taşıyan bandın yanına doğru M2 motoru sayesinde gider ve E5 anahtarının kapanması ile belirli bir noktada kovanı bekler. 2. Kovanları taşıyan bant M1 motoru sayesinde geriye doğru giderek kovanları alır ve tekrar eski yerine yani robot kolunun altına gelir. 3. Robot kolunu ileri yönde hareket ettiren M1 motorunu E4 anahtarı kontrol eder. 4. E4 anahtarına dokunulduğunda robot kolumuz kovanın içindeki çerçeveyi alır. 5. Suni gümeç yapma işlemi için kurulan düzeneğe doğru götürmeye çalışır. 6. İlk aşamasında M1 motoru körükleme anahtarına dokunur ve duman çıkartma işlemi gerçekleştirilmiş olur. 7. M1 motoru daha sonraki ilerlemesinde silme (süpürme) işlemini gerçekleştiren anahtarı devreye sokar. 8. Bir sonraki aşamada robot kolu suni gümeç işlemi yapan kazan üzerine gelip bekler. 9. Son aşama ise suni gümeç işlemi yapan kazanın üzerindeki robot kolunun M3 motoru ile çerçeveyi kazana yerleştirir ve tekrar kovandan çerçeve almak için geri döner. 1673



4 Şekil 1: Arıcılık Benzetim Projesine Ait Genel Çizim 4. PROJEDE KULLANILAN MALZEMELER Motorlar Pervane 1674



5 Elektromıknatıs Destek Parçaları Lambalar 1675


6 Dişli Kutusu Bal Birikme Kabı Pervane ve Motor 1676

7 5. MONTAJ AŞAMASI Kovanı alıp gelen bant Kovanı getiren bant ve motor aksamı Robot kolu ve elektromıknatıs 1677

8 Körükleme, silme,çerçeveyi alıp getiren motoru kontrol eden anahtarlar ve kızağı. Robot kolunun monte edilmiş hali 1678

9 Sistemin Genel Görünümü 6. SİSTEMİN ÇALIŞMASI Sistem çalışmadan önce E5, E4, E1, E2 anahtarları 0 konumunda ve M1, M2 ve M3 motorlarımız durmuş vaziyettedir. 1679

10 Sistemin Üstten Görünüşü 1. İlk aşamada E5 anahtarı 0 ise M2 motoru geriye doğru yani suni gümeç kazanına doğru ilerleyecek ve E5 anahtarını 1 yapacaktır. Bu konumda M2 motoru duracaktır. E2 anahtarı 0 konumunda olduğu zaman kovanı taşıyan bant M1 motoru sayesinde geriye doğru gidecektir. E2 anahtarı 1 olduğu zaman bant duracak ve E1 anahtarının konumuna bakılacaktır. E1 0 ise M1 motoru ileri yönde hareket edecek, E1 anahtarı 1 olduğunda M1 motoru duracaktır. Yani kovanı alıp gelme işlemi gerçekleşmiş olacaktır. 1680

11 Sistemin Yandan (Kovanı alıp gelen bant tarafından) Görünüşü 2. Eğer E4 anahtarı 0 ise robot kolumuz, kovanı taşıyan banda doğru gitmektedir. E4 anahtarı 1 olduğu zaman M2 motorumuz kovanın üzerinde durmakta, M3 motoru sayesinde robot kolumuz çerçeveyi alıp kaldırmakta ve E5 anahtarının konumuna bakarak yapacağı işlemi gerçekleştirmektedir. E5 0 ise motorumuz geriye doğru gitmektedir. 1681

12 Sistemin Yandan (Suni gümeç kazanı tarafından) Görünüşü Robot kolunu hareket ettiren kızak üzerindeki körüklemeyi ve silme (Süpürme) işlemini başlatacak anahtarlara dokunarak körükleme ve süpürme işlemleri gerçekleşmektedir. E5 1 konumunda, iki işlem gerçekleşmektedir. Sistemin Önden Görünüşü 1682

13 1. M2 motoru durmaktadır. 2. M3 motorunun enerjisi kesilecektir. Bu aşamadan itibaren sistem ilk konumuna dönmektedir. 7. PROGRAMIN LOGO DİLİNDE YAZILIMI TO BAL MSTOP M1 MSTOP M2 MSTOP M3 ANA_ARI END TO ANA_ARI IF EQUALP STATUS E5 0 [MCCW M2] IF EQUALP STATUS E5 1 [MSTOP M2] IF EQUALP STATUS E5 1 [OGUL_ARI] TO OGUL_ARI IF EQUALP STATUS E2 0 [MCCW M1] IF EQUALP STATUS E2 1 [MSTOP M1] IF EQUALP STATUS E2 1 [KOVAN] 1683

14 OGUL_ARI END TO KOVAN IF EQUALP STATUS E1 0 [MCW M1] IF EQUALP STATUS E1 1 [MSTOP M1] IF EQUALP STATUS E1 1 [CERCEVE] KOVAN END TO CERCEVE IF EQUALP STATUS E4 0 [MCW M2] IF EQUALP STATUS E4 1 [MCCW M2] IF EQUALP STATUS E4 1 [SUZME] CERCEVE END TO SUZME IF EQUALP STATUS E5 0 [MCCW M2] IF EQUALP STATUS E5 1 [MSTOP M2] IF EQUALP STATUS E5 1 [MSTOP M3] IF EQUALP STATUS E5 1 [ANA_ARI] 1684
![[MCCW M2] IF EQUALP STATUS E4 1 [SUZME] CERCEVE END TO SUZME IF EQUALP STATUS E5 0 [MCCW M2] IF](/docs-images/42/2011562/images/page_14.jpg "EQUALP STATUS E5 1 [MSTOP M2] IF EQUALP STATUS E5 1 [MSTOP M3] IF EQUALP STATUS E5 1 [ANA_ARI]")
15 SUZME END 8. PROGRAMIN ADIM ADIM AÇIKLANMASI TO BAL MSTOP M1 MSTOP M2 MSTOP M3 ANA_ARI END Bu bölümde sistem bal adıyla başlatılmakta ve çalışma başladığında ilk olarak M1, M2 VE M3 motorları çalışmaz hale getirilmektedir. TO ANA_ARI IF EQUALP STATUS E5 0 [MCCW M2] IF EQUALP STATUS E5 1 [MSTOP M2] IF EQUALP STATUS E5 1 [OGUL_ARI] E5 anahtarının durumuna bakılmaktadır. Anahtar [E5] 0 konumunda ise M2 motoru ters yönde çalışarak geri dönmektedir. [E5]

16 olduğu zaman M2 motorumuz durmaktadır. Ve OGUL_ARI alt programı çalışmaktadır. TO OGUL_ARI IF EQUALP STATUS E2 0 [MCCW M1] IF EQUALP STATUS E2 1 [MSTOP M1] IF EQUALP STATUS E2 1 [KOVAN] OGUL_ARI END Bu bölüm çalıştırıldığında ilk olarak E2 anahtarının durumuna bakılır ve anahtar [E2] 0 konumunda ise M1 motorumuz geri yönde çalışır. E2 anahtarının 1 olduğu zamana kadar devam eder. Anahtar 1 olduğu zaman M1 motoru durur ve bir alt programa (KOVAN adlı alt programa)dallanır. TO KOVAN IF EQUALP STATUS E1 0 [MCW M1] IF EQUALP STATUS E1 1 [MSTOP M1] IF EQUALP STATUS E1 1 [CERCEVE] KOVAN END 1686
![ilk olarak E2 anahtarının durumuna bakılır ve anahtar [E2] 0 konumunda ise M1 motorumuz geri yönde çalışır.](/docs-images/42/2011562/images/page_16.jpg "E2 anahtarının 1 olduğu zamana kadar devam eder. Anahtar 1 olduğu zaman M1 motoru durur ve bir alt programa (KOVAN adlı alt programa)dallanır.")
17 Bu bölüm çalıştırıldığında ilk olarak E1 anahtarının durumuna bakılır ve anahtar [E1] 0 konumunda ise M1 motoru ileri yönde çalışır. E1 anahtarının konumu 1 olduğu zamana kadar ileri yönde hareket devam eder. Anahtar 1 olduğu zaman M1 motoru durur ve bir alt programa dallanır (CERCEVE adlı alt program). TO CERCEVE IF EQUALP STATUS E4 O [MCW M2] IF EQUALP STATUS E4 1 [MCCW M2] IF EQUALP STATUS E4 1 [SUZME] CERCEVE END Bu bölüm çalıştırıldığında ilk olarak E4 anahtarının durumuna bakılır ve anahtar [E4] 0 konumunda ise M2 motorumuz ileri yönde çalışır. E4 anahtarının konumu 1 olduğu zamana kadar ileri yönde hareket devam eder. Anahtar 1 olduğu zaman M2 motoru durur ve bir alt programa (SUZME adlı alt programına) dallanır. TO SUZME IF EQUALP STATUS E5 0 [MCCW M2] IF EQUALP STATUS E5 1 [MSTOP M2] IF EQUALP STATUS E5 1 [MSTOP M3] IF EQUALP STATUS E5 1 [ANA_ARI] 1687
![TO CERCEVE IF EQUALP STATUS E4 O [MCW M2] IF EQUALP STATUS E4 1 [MCCW M2] IF EQUALP STATUS E4 1 [SUZME] CERCEVE END Bu bölüm çalıştırıldığında ilk olarak E4 anahtarının durumuna bakılır ve anahtar](/docs-images/42/2011562/images/page_17.jpg "[E4] 0 konumunda ise M2 motorumuz ileri yönde çalışır. E4 anahtarının konumu 1 olduğu zamana kadar ileri yönde hareket devam eder.")
18 SUZME END Sistemimizin son bölümü çalıştırıldığında ilk olarak E5 anahtarının durumuna bakılır ve anahtar [E5] 0 konumunda ise M2 motoru geri yönde çalışır. E5 anahtarının 1 olduğu zamana kadar devam eder. Anahtar 1 olduğu zaman M2 ve M3 motorları durur ve yeniden işlemleri tekrarlamak için ANA_ARI alt programına dallanır. 1688


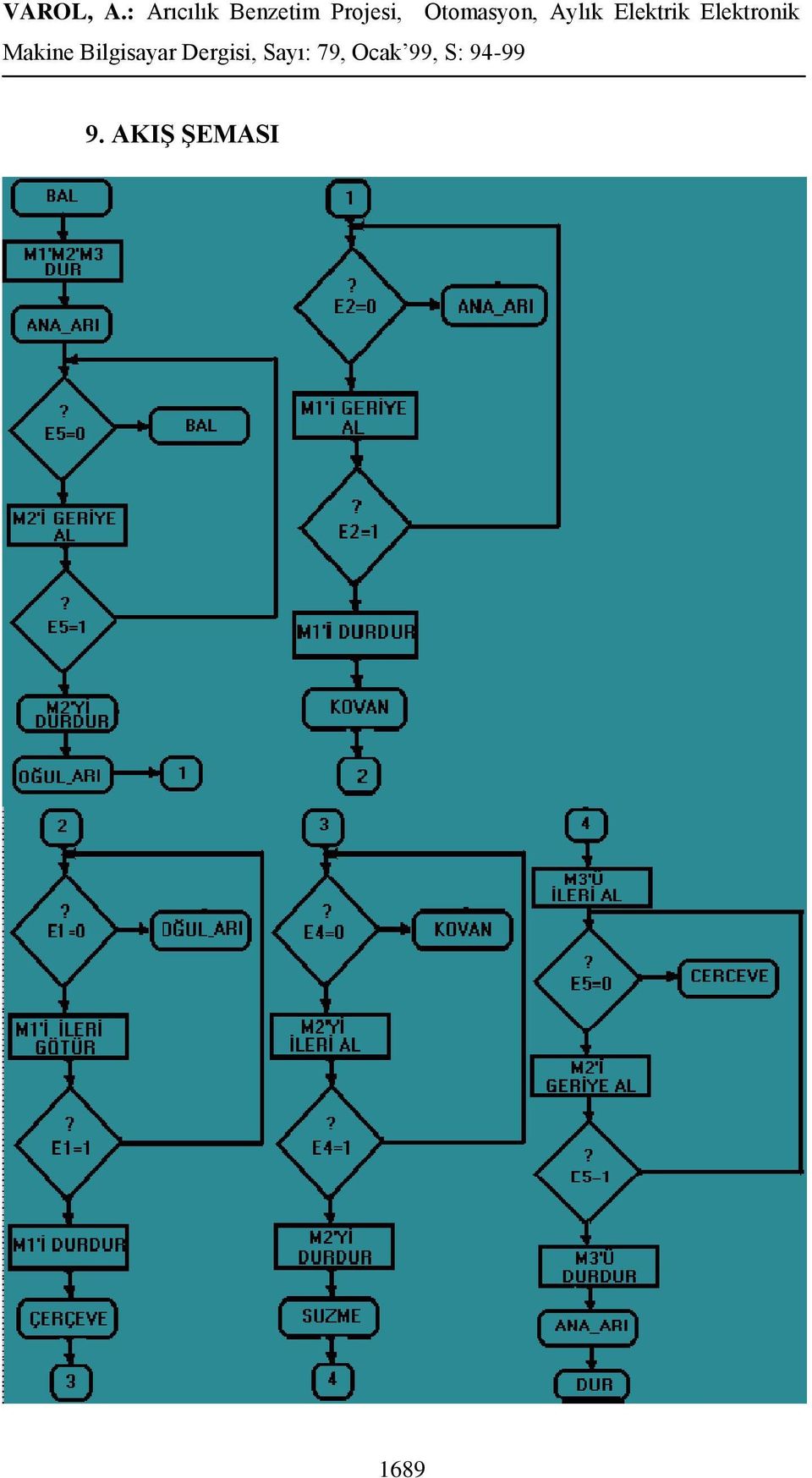
19 9. AKIŞ ŞEMASI 1689
20 10. SONUÇ Burada ele alınan benzetim projesinin amacı, basit otomasyon tekniklerinin öğretilmesi ve montajı gerçekleştirilen setin kontrolünün bilgisayarda yapılmasıdır. Montajı gerçekleştirilen sistemde kullanılan parçalar, küçük lego parçalardır. Bu parçaların uygun biçimde montajlarının yapılması ile, çok değişik otomasyon sistemlerini kurmak mümkündür. KAYNAKLAR Arıcılık Benzetim Projesi, Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik-Bilgisayar Eğitimi Bölümü, Robotik Dersi, Proje no: 1998/8 1690

Varol, A.: Otomatik Pres Makinası, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 74, Ağustos 98, S: 98-101
 5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.1. OTOBAN GEÇİŞ SİSTEMİ
 5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.13. SONDAJ MAKİNESİ PROJESİ
 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ
 5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
VAROL, A.: Koli İstifleme Otomasyonu, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 107, Mayıs 2001, S: 114-119
 5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ
 5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU
 5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU
 TEZGAHI OTOMASYONU") 5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU
 5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ
 5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU
 5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.33. OTOMATİK PARÇA DELME OTOMASYONU
 5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU. Engin AVCI enginavci@firat.edu.tr
 5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ
 5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.36. FINDIK SAVURMA OTOMASYONU
 5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU
 5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.15. VİNÇ BENZETİM PROJESİ
 5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.40. SPREY DOLDURMA OTOMASYONU
 5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.41. UYDU ANTENİ YÖNLENDİRME OTOMASYON PROJESİ
 5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU
 5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU
 5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI
 5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU
 5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ
 5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ
 5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU
 5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.48. KALİTE KONTROL OTOMASYONU
 5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.9. OTOMATİK MEYVE SOYMA VE DİLİMLEME MAKİNASI
 5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU
 5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU
 5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ
 5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI
 5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.28. UÇAKSAVAR PROJESİ
 5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ
 5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ
 5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.51. SERAMİK PAKETLEME OTOMASYONU
 5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.46. EBAT KONTROL OTOMASYONU
 5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU. Abdulkadir ġengür
 5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU
 5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS
 4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU
 5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU
 5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI
 5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU
 5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.43. CAM TUĞLA BOYAMA OTOMASYONU
 5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU
 5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU
 5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
Varol, A., Şengür, A., Avcı, E.: Atık Toplayan Araç Otomasyonu, Otomasyon, Sayı 154, 2005(03), Mart 2005.
, Mart 2005.") 2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU
 5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.3. ROBOTLAR VE ISI KONTROLÜ
 5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür ksengur@firat.edu.tr
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU. Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ
 4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:avarol@firat.edu.tr 2 e posta:ferhatb@firat.edu.tr
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:avarol@firat.edu.tr 2 e posta:ferhatb@firat.edu.tr
ARICILIK EKİPMANLARI FOTOĞRAF: MEHMET YÜKSEL.
 ARICILIK EKİPMANLARI FOTOĞRAF: MEHMET YÜKSEL www.apimaye.com apimaye_katalog2012_ee01.indd 1 10/24/12 2:43 PM apimaye_katalog2012_ee01.indd 2 10/24/12 2:43 PM ARICILIK EKİPMANI Maye Ltd, 2009 2010 2011
ARICILIK EKİPMANLARI FOTOĞRAF: MEHMET YÜKSEL www.apimaye.com apimaye_katalog2012_ee01.indd 1 10/24/12 2:43 PM apimaye_katalog2012_ee01.indd 2 10/24/12 2:43 PM ARICILIK EKİPMANI Maye Ltd, 2009 2010 2011
5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ
 5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ VAROL, A.: Otoban GeçiĢ Sistemi, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 65, Kasım 97, S: 38-41 5.1. OTOBAN GEÇĠġ SĠSTEMĠ
5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ VAROL, A.: Otoban GeçiĢ Sistemi, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 65, Kasım 97, S: 38-41 5.1. OTOBAN GEÇĠġ SĠSTEMĠ
Örnek tesisler & kullanımlar 2
 gaz basınçlı tek nokta yağlama otomatik yağlama elle yağlamay son pahalı merkezi yağlama sistemlerine son gres- ve normal yağ rulman, zincir, kızak, bant, halat, vb. iç & dış mekanlarda Örnek tesisler
gaz basınçlı tek nokta yağlama otomatik yağlama elle yağlamay son pahalı merkezi yağlama sistemlerine son gres- ve normal yağ rulman, zincir, kızak, bant, halat, vb. iç & dış mekanlarda Örnek tesisler
OTOMASYON PROJELERİ VE UYGULAMALARI
 OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Nedir? Otomasyon u kısaca, bir işin insan ile makine arasında paylaşılması şeklinde tanımlayabiliriz. Bir otomasyon sisteminde toplam işin paylaşım yüzdesi
OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Nedir? Otomasyon u kısaca, bir işin insan ile makine arasında paylaşılması şeklinde tanımlayabiliriz. Bir otomasyon sisteminde toplam işin paylaşım yüzdesi
UDI U818A Karbon Tüp ve Diş Değiştirme Gears
 UDI U818A Karbon Tüp ve Diş Değiştirme Gears Bu kılavuz pervaneler dönmeye gerekli olan karbon tüp ve diş dişli değiştirilmesini hizmet edecektir. Yazan: Anthony Mitchell GİRİŞ Bu kılavuzu okuduktan sonra,
UDI U818A Karbon Tüp ve Diş Değiştirme Gears Bu kılavuz pervaneler dönmeye gerekli olan karbon tüp ve diş dişli değiştirilmesini hizmet edecektir. Yazan: Anthony Mitchell GİRİŞ Bu kılavuzu okuduktan sonra,
Arıcılığın Tanımı. Arı Yetiştirme Ürünler. Ürünler. Ürünler. Ürünler. Hayvan Yetiştirme ve Besleme Dersi
 Hayvan Yetiştirme ve Besleme Dersi Arıcılığın Tanımı Arı Yetiştirme Arıcılık; bitkisel kaynakları, arıyı ve emeği bir arada kullanarak, bal, polen, arısütü, balmumu, propolis, arı zehiri gibi ürünler ile
Hayvan Yetiştirme ve Besleme Dersi Arıcılığın Tanımı Arı Yetiştirme Arıcılık; bitkisel kaynakları, arıyı ve emeği bir arada kullanarak, bal, polen, arısütü, balmumu, propolis, arı zehiri gibi ürünler ile
2014-2015 EĞİTİM-ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ VE YAZILIM DERSİ 6. SINIF 2. DÖNEM 2. SINAV ÇALIŞMA NOTLARI
 2014-2015 EĞİTİM-ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ VE YAZILIM DERSİ 6. SINIF 2. DÖNEM 2. SINAV ÇALIŞMA NOTLARI İşletim Sisteminde Yapılan Uygulamalar Bir Bilgisayarda Hangi İşletim Sistemi Yüklü Olduğunu
2014-2015 EĞİTİM-ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ VE YAZILIM DERSİ 6. SINIF 2. DÖNEM 2. SINAV ÇALIŞMA NOTLARI İşletim Sisteminde Yapılan Uygulamalar Bir Bilgisayarda Hangi İşletim Sistemi Yüklü Olduğunu
Yüksek toz konsantrasyonlarında en iyi teknik çözüm Geniş filtreleme yüzeyi ve kompakt tasarım Uzun ömür ve ağır çalışma şartları için güçlü yapı
 Yüksek toz konsantrasyonlarında en iyi teknik çözüm Geniş filtreleme yüzeyi ve kompakt tasarım Uzun ömür ve ağır çalışma şartları için güçlü yapı Alanın kısıtlı olduğu yerlerde en iyi çözüm Düşük sarfiyat
Yüksek toz konsantrasyonlarında en iyi teknik çözüm Geniş filtreleme yüzeyi ve kompakt tasarım Uzun ömür ve ağır çalışma şartları için güçlü yapı Alanın kısıtlı olduğu yerlerde en iyi çözüm Düşük sarfiyat
MİKRO İŞLEMCİ KONTROLLÜ KONVEYÖRLÜ FIRIN
 MİKRO İŞLEMCİ KONTROLLÜ KONVEYÖRLÜ FIRIN MODEL : SF 800, SF 800-52,SF-1300, SF-1300L, SF 1300 LD, SF-1900 L MONTAJ KLAVUZU SIRA NO PARÇA ADI MİKTAR 1 Bant Sıyırıcı (Temizleyici) Sacı 1 2 Ön Artık Toplama
MİKRO İŞLEMCİ KONTROLLÜ KONVEYÖRLÜ FIRIN MODEL : SF 800, SF 800-52,SF-1300, SF-1300L, SF 1300 LD, SF-1900 L MONTAJ KLAVUZU SIRA NO PARÇA ADI MİKTAR 1 Bant Sıyırıcı (Temizleyici) Sacı 1 2 Ön Artık Toplama
ARICILIKTA ORGANİK ÜRETİM
 ARICILIKTA ORGANİK ÜRETİM İNCİ AKGÜL ZİRAAT MÜHENDİSİ ORGANİK TARIM PROJELER KOORDİNATÖRÜ Giriş Arıcılık; arı kolonilerini ve bitkisel kaynakları birlikte kullanarak arı sütü, bal ve polen gibi çeşitli
ARICILIKTA ORGANİK ÜRETİM İNCİ AKGÜL ZİRAAT MÜHENDİSİ ORGANİK TARIM PROJELER KOORDİNATÖRÜ Giriş Arıcılık; arı kolonilerini ve bitkisel kaynakları birlikte kullanarak arı sütü, bal ve polen gibi çeşitli
Veteriner Hekim : Abdullah AKIN
 Veteriner Hekim : Abdullah AKIN Langsroth Kovanı 1-Kovan Kapağı, 2-örtü Tahtası, 3-Ballık Kuluçkalık, 4-Dip Tablası 5-Uçuş Tahtası Langsroth Kovan Ekipmanları Kovan Dip Tahtası Kovanın en altında bulunan
Veteriner Hekim : Abdullah AKIN Langsroth Kovanı 1-Kovan Kapağı, 2-örtü Tahtası, 3-Ballık Kuluçkalık, 4-Dip Tablası 5-Uçuş Tahtası Langsroth Kovan Ekipmanları Kovan Dip Tahtası Kovanın en altında bulunan
TURN-OFF DEVRESİ BASKI DEVRE ÇIKARMA
 DEVRE ŞEMASI TURN-OFF DEVRESİ BASKI DEVRE ÇIKARMA Madde 1: Tüm elemanlar temin edilmelidir. Madde 2: Transistör, entegre gibi elemanların bacak isimleri katalogdan öğrenilmelidir. Madde 3: YERLEŞİM PLANI
DEVRE ŞEMASI TURN-OFF DEVRESİ BASKI DEVRE ÇIKARMA Madde 1: Tüm elemanlar temin edilmelidir. Madde 2: Transistör, entegre gibi elemanların bacak isimleri katalogdan öğrenilmelidir. Madde 3: YERLEŞİM PLANI
Automatic Entrance & Acccess System GARAJ. Endüstiyel - Seksiyonel Garaj Kapıları. Seksiyonel Kapılar
 TM Automatic Entrance & Acccess System Endüstiyel - Seksiyonel Garaj Kapıları GARAJ Seksiyonel Kapılar TM Automatic Entrance & Acccess System TRONCO Endüstriyel Seksiyonel Kapılar TRONCO endüstriyel seksiyonel
TM Automatic Entrance & Acccess System Endüstiyel - Seksiyonel Garaj Kapıları GARAJ Seksiyonel Kapılar TM Automatic Entrance & Acccess System TRONCO Endüstriyel Seksiyonel Kapılar TRONCO endüstriyel seksiyonel
DEĞĐŞKEN DEBĐLĐ SĐRKÜLASYON POMPALARI
 DEĞĐŞKEN DEBĐLĐ SĐRKÜLASYON POMPALARI M. Bülent Vural 1953 yılında doğdu. 1976 yılında Berlin Teknik Üniversitesinden Makina Yüksek Mühendisi olarak mezun oldu. Halen Wilo Pompa Sistemleri A.Ş. Genel Müdürü
DEĞĐŞKEN DEBĐLĐ SĐRKÜLASYON POMPALARI M. Bülent Vural 1953 yılında doğdu. 1976 yılında Berlin Teknik Üniversitesinden Makina Yüksek Mühendisi olarak mezun oldu. Halen Wilo Pompa Sistemleri A.Ş. Genel Müdürü
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işık İzleyen Araba Projesi Proje No 2 Proje Raporu Adı, Soyadı, Öğrenci
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işık İzleyen Araba Projesi Proje No 2 Proje Raporu Adı, Soyadı, Öğrenci
Boolean Mantık Tasarımlarının PLC Üzerinde Gerçeklenmeleri A + A = 1...(7) A. A = 0 (8)
 A. A = 0 (8)") Boolean Mantık Tasarımlarının PLC Üzerinde Gerçeklenmeleri A + = A..(3) A +1 = A.. (4) A. =...(5) A. 1 = A...(6) A + A = 1....(7) A. A = (8) Örnek 2.12 Aşağıda verilen mantıksal ifadeleri sadeleştirerek,
Boolean Mantık Tasarımlarının PLC Üzerinde Gerçeklenmeleri A + = A..(3) A +1 = A.. (4) A. =...(5) A. 1 = A...(6) A + A = 1....(7) A. A = (8) Örnek 2.12 Aşağıda verilen mantıksal ifadeleri sadeleştirerek,
Veteriner Hekim ; Abdullah AKIN
 Veteriner Hekim ; Abdullah AKIN 1-İşçi ARI 2-Kraliçe ( Ana ) Arı 3-Erkek Arı 1-İşçi Arı 1-İşçi Arılar İşçi arılar, bir arı kolonisinde çiftleşme kapasitesine sahip olmayan dişi arılar. Pek çok arı
Veteriner Hekim ; Abdullah AKIN 1-İşçi ARI 2-Kraliçe ( Ana ) Arı 3-Erkek Arı 1-İşçi Arı 1-İşçi Arılar İşçi arılar, bir arı kolonisinde çiftleşme kapasitesine sahip olmayan dişi arılar. Pek çok arı
Yazan: Eric H GİRİŞ ARAÇLAR: PARÇALAR:
 LG Shine Komple Sökme. Bu kılavuz nasıl temiz eller, araçlar ve çalışma alanı ile açık bir ortamda çalışmak için en iyi olduğunu unutmayın vb değiştirme, tamir, temizlik, iç bileşenlere almak için size
LG Shine Komple Sökme. Bu kılavuz nasıl temiz eller, araçlar ve çalışma alanı ile açık bir ortamda çalışmak için en iyi olduğunu unutmayın vb değiştirme, tamir, temizlik, iç bileşenlere almak için size
BÖLÜM 5 S_BĐT. Komut listesi (STL) Network 1 LD I0.0 S Q0.0, 1
 Network 1 LD I0.0 S Q0.0, 1") BÖLÜM 5 ET VE EET ÖLELEĐ : PLC teknolojisinde sürekli çalışmayı sağlamak için mühürleme (kilitleme) pek kullanılmaz. ürekli çalışma başka bir yöntemle çözülür. Bu da ET ve EET tekniğidir. Çıkışın girişe
BÖLÜM 5 ET VE EET ÖLELEĐ : PLC teknolojisinde sürekli çalışmayı sağlamak için mühürleme (kilitleme) pek kullanılmaz. ürekli çalışma başka bir yöntemle çözülür. Bu da ET ve EET tekniğidir. Çıkışın girişe
ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME
 ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME Şekil - 1 Şekilde üç fazlı asenkron motora buton ve kontaktörle yol veren devre görülmektedir. Devrede start butonuna basıldığında K 1 kontaktörünün
ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME Şekil - 1 Şekilde üç fazlı asenkron motora buton ve kontaktörle yol veren devre görülmektedir. Devrede start butonuna basıldığında K 1 kontaktörünün
SERVO MOTOR TAMİRİ PLC TAMİRİ AC/DC SÜRÜCÜ TAMİRİ OPERATÖR PANEL TAMİRİ ENDÜSTRİYEL PC TAMİRİ ELEKTRONİK KART TAMİRİ
 SERVO MOTOR TAMİRİ PLC TAMİRİ AC/DC SÜRÜCÜ TAMİRİ OPERATÖR PANEL TAMİRİ ENDÜSTRİYEL PC TAMİRİ ELEKTRONİK KART TAMİRİ BİZ KİMİZ? Biz Kimiz? SERMOT Endüstriyel Otomasyon San. Tic. A.Ş. alanında uzman kadrosu
SERVO MOTOR TAMİRİ PLC TAMİRİ AC/DC SÜRÜCÜ TAMİRİ OPERATÖR PANEL TAMİRİ ENDÜSTRİYEL PC TAMİRİ ELEKTRONİK KART TAMİRİ BİZ KİMİZ? Biz Kimiz? SERMOT Endüstriyel Otomasyon San. Tic. A.Ş. alanında uzman kadrosu
- 1 - A : METAL AYAKLI KOMPOZİT AHŞAP ÇATILI PİKNİK MASASI
 A : METAL AYAKLI KOMPOZİT AHŞAP ÇATILI PİKNİK MASASI a) GENEL ÖZELLİKLER 1) Ayaklar ve taşıyıcı kısım metal, oturma yüzeyi ve masa yüzeyi kompozit ahşap malzemeden imal edilmiş olacaktır. 2) Yükseklik,
A : METAL AYAKLI KOMPOZİT AHŞAP ÇATILI PİKNİK MASASI a) GENEL ÖZELLİKLER 1) Ayaklar ve taşıyıcı kısım metal, oturma yüzeyi ve masa yüzeyi kompozit ahşap malzemeden imal edilmiş olacaktır. 2) Yükseklik,
Varol, A., Carabott, V., Vivet, M., Delannoy, P.: Sorting Coins with Different Diameters Through the Use of a Robot, Matik'97, Makine Tasarım Teorisi
 243 2.5. SORTING COINS WITH DIFFERENT DIAMETERS THROUGH THE USE OF A ROBOT ABSTRACT Control Technology is an exiting dynamic interdisciplinary field of study. In recent years, interest in this field and
243 2.5. SORTING COINS WITH DIFFERENT DIAMETERS THROUGH THE USE OF A ROBOT ABSTRACT Control Technology is an exiting dynamic interdisciplinary field of study. In recent years, interest in this field and
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Dc Motor Hız Kontrolü-1 Proje Raporu Adı, Soyadı, Öğrenci Numarası YUNUS
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Dc Motor Hız Kontrolü-1 Proje Raporu Adı, Soyadı, Öğrenci Numarası YUNUS
Arıcılığa Başlarken... Dr. Ali KORKMAZ Ziraat Yüksek Mühendisi Samsun Tarım İl Müdürlüğü
 Arıcılığa Başlarken... Dr. Ali KORKMAZ Ziraat Yüksek Mühendisi Samsun Tarım İl Müdürlüğü Her şeyden önce... Kovan Seçimi Arı Irkı Seçimi Arıcılık Yapılacak Bölge Seçimi Arılık Seçimi» çok önemlidir. Ancak...
Arıcılığa Başlarken... Dr. Ali KORKMAZ Ziraat Yüksek Mühendisi Samsun Tarım İl Müdürlüğü Her şeyden önce... Kovan Seçimi Arı Irkı Seçimi Arıcılık Yapılacak Bölge Seçimi Arılık Seçimi» çok önemlidir. Ancak...
OTOMOTİV TEKNOLOJİLERİ
 OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde Aktarma Organları Sistem Tanımı Mekanik Kavramalar Manuel Transmisyon ve Transaxle
OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde Aktarma Organları Sistem Tanımı Mekanik Kavramalar Manuel Transmisyon ve Transaxle
HD710 ISI KONTROLLÜ RÖLE MONTAJ KILAVUZU MALZEME LİSTESİ
 HD710 ISI KONTROLLÜ RÖLE MONTAJ KILAVUZU MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ MONTAJ İŞLEM BASAMAKLARI 1. Poşetten çıkan malzemelerinizi, malzeme listesine göre kontrol ediniz. Elinizdeki her
HD710 ISI KONTROLLÜ RÖLE MONTAJ KILAVUZU MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ MONTAJ İŞLEM BASAMAKLARI 1. Poşetten çıkan malzemelerinizi, malzeme listesine göre kontrol ediniz. Elinizdeki her
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi):
:") KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
FASİKÜL Basit Elektrik Devreleri
 7. FASİKÜL Basit Elektrik Devreleri Basit Elektrik Devreleri 1 Basit Elektrik Devreleri Etkinlik 1. Aşağıda isimleri ve resimleri karışık olarak verilen devre elemanlarını eşleştirelim. Örnekteki gibi
7. FASİKÜL Basit Elektrik Devreleri Basit Elektrik Devreleri 1 Basit Elektrik Devreleri Etkinlik 1. Aşağıda isimleri ve resimleri karışık olarak verilen devre elemanlarını eşleştirelim. Örnekteki gibi
Gübre bantları her bir tam dönüş yaptıklarında arka başlık üzerinde bulunan gübre sıyırma aparatı ve sıyırıcı tavalar sayesinde üzerindeki
 Kümes sistemi içinde amaca en çok hizmet eden eleman kafes sistemidir. EGE KAFES sisteminde klasik tavuk kafesi (EGE 60 ) ebatı 600x580x600mm (600x600)olarak imal edilmektedir. 60x60 kümesler için göz
Kümes sistemi içinde amaca en çok hizmet eden eleman kafes sistemidir. EGE KAFES sisteminde klasik tavuk kafesi (EGE 60 ) ebatı 600x580x600mm (600x600)olarak imal edilmektedir. 60x60 kümesler için göz
AKSİYEL FAN HIZ KONTROL ÜNİTESİ
 AKSİYEL FAN & HIZ KONTROL ÜNİTESİ SFW0S 300 BROŞÜR TEKNİK ÖZELLİKLER SALİKS SFW0S 300 Fan yaygın olarak pano ve server odaları, elekrik panoları gibi endüstriyel makine soğutmalarında, aynı zamanda yaşamsal
AKSİYEL FAN & HIZ KONTROL ÜNİTESİ SFW0S 300 BROŞÜR TEKNİK ÖZELLİKLER SALİKS SFW0S 300 Fan yaygın olarak pano ve server odaları, elekrik panoları gibi endüstriyel makine soğutmalarında, aynı zamanda yaşamsal
Faaliyet Faaliyet zamanı dağılımı A U(5, 8) B U(6, 15) U(10,20) U(4,20) U(12,25) U(15,30)
 B U(6, 15) U(10,20) U(4,20) U(12,25) U(15,30)") ENM 316 BENZETİM ÖDEV SETİ Ödev 1. Bir projede A, B, C, D, E ve F olmak üzere 6 faaliyet vardır. Projenin tamamlanması için bu faaliyetlerin sırası ile yapılması gerekmektedir. Her faaliyetin tamamlanması
ENM 316 BENZETİM ÖDEV SETİ Ödev 1. Bir projede A, B, C, D, E ve F olmak üzere 6 faaliyet vardır. Projenin tamamlanması için bu faaliyetlerin sırası ile yapılması gerekmektedir. Her faaliyetin tamamlanması
PNÖMATİK VE HİDROLİK SİSTEM UYGULAMALARI. Ömür AKYAZI 1, Doğan ÇOKRAK 2
 Fırat Üniversitesi-Elazığ PNÖMATİK VE HİDROLİK SİSTEM UYGULAMALARI Ömür AKYAZI 1, Doğan ÇOKRAK 2 1 Sürmene Abdullah Kanca Meslek Yüksekokulu Karadeniz Teknik Üniversitesi oakyazi@ktu.edu.tr 2 Teknik Eğitim
Fırat Üniversitesi-Elazığ PNÖMATİK VE HİDROLİK SİSTEM UYGULAMALARI Ömür AKYAZI 1, Doğan ÇOKRAK 2 1 Sürmene Abdullah Kanca Meslek Yüksekokulu Karadeniz Teknik Üniversitesi oakyazi@ktu.edu.tr 2 Teknik Eğitim
Arı ürünleri ve Etkin Üretim Yöntemleri. Prof. Dr. Muhsin DOĞAROĞLU
 Arı ürünleri ve Etkin Üretim Yöntemleri Prof. Dr. Muhsin DOĞAROĞLU ARI ÜRÜNLERİNDE VERİMLİLİĞİ BELİRLEYEN FAKTÖRLER BÜTÜN ÜRÜNLER İÇİN YAKLAŞIK OLARAK AYNI DÜZEYDE ETKİ EDER GENETİK YAPI KULUÇKA ETKİNLİĞİ
Arı ürünleri ve Etkin Üretim Yöntemleri Prof. Dr. Muhsin DOĞAROĞLU ARI ÜRÜNLERİNDE VERİMLİLİĞİ BELİRLEYEN FAKTÖRLER BÜTÜN ÜRÜNLER İÇİN YAKLAŞIK OLARAK AYNI DÜZEYDE ETKİ EDER GENETİK YAPI KULUÇKA ETKİNLİĞİ
sökülmesi ve Roomba nasıl temizlenir 560
 sökülmesi ve Roomba nasıl temizlenir 560 (Vb çamur, sos,) onaylı olmayan maddeler üzerinde çalıştıktan sonra Roomba 560 tam temizlik Yazan: HoyeBoye GİRİŞ Bu kılavuz Roomba toz-bin, fırça meclisleri ve
sökülmesi ve Roomba nasıl temizlenir 560 (Vb çamur, sos,) onaylı olmayan maddeler üzerinde çalıştıktan sonra Roomba 560 tam temizlik Yazan: HoyeBoye GİRİŞ Bu kılavuz Roomba toz-bin, fırça meclisleri ve
T.C. MUĞLA TİCARET BORSASI İKİ TARİH ARASI BORSA BÜLTENİ. Enaz Fiyat. Ençok Fiyat. Ortalama Fiyat YULAF , KG 9,336.
 HUBUBAT MISIR MISIR 01/0/017-8/0/017 T.C. Sayfa: 1-11 MISIR MTS 0.67 0.75 0.7076 0,6 KG 14,336.40 MISIR ı: 14,336.40 MISIR ı 14,336.40 YULAF YULAF SAMAN MTS 0.30 0.30 0.3000 31,1.43 KG 9,336.73 1 YULAF
HUBUBAT MISIR MISIR 01/0/017-8/0/017 T.C. Sayfa: 1-11 MISIR MTS 0.67 0.75 0.7076 0,6 KG 14,336.40 MISIR ı: 14,336.40 MISIR ı 14,336.40 YULAF YULAF SAMAN MTS 0.30 0.30 0.3000 31,1.43 KG 9,336.73 1 YULAF
Kaynak Osilatörü Kullanım Kılavuzu
 İÇİNDEKİLER Genel Özellikler 2 Kontrol Kutusu 3 Tuş Fonksiyonları 4 Ayarların Yapılması 6 Örnek Ayar 7 Açısal Osilatörün Kullanım Programları 7 Osilatör Montaj Şekli 9 Dişli Kutusu Boyutları 10 Osilatör
İÇİNDEKİLER Genel Özellikler 2 Kontrol Kutusu 3 Tuş Fonksiyonları 4 Ayarların Yapılması 6 Örnek Ayar 7 Açısal Osilatörün Kullanım Programları 7 Osilatör Montaj Şekli 9 Dişli Kutusu Boyutları 10 Osilatör
12/27/2011. Yenileme kararları. Bu dersin amacı
 Yenileme kararları Bu dersin amacı Elimizdeki varlığı serviste tutmalı mıyız yoksa yeni bir makine ile değiştirmeli miyiz sorusuna cevap vermektir. Bu alternatifler birbirini dışlayan alternatiflerdir,
Yenileme kararları Bu dersin amacı Elimizdeki varlığı serviste tutmalı mıyız yoksa yeni bir makine ile değiştirmeli miyiz sorusuna cevap vermektir. Bu alternatifler birbirini dışlayan alternatiflerdir,
Bölüm 4 Ardışıl Lojik Devre Deneyleri
 Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop