MEKATRONİK. /mekatronikmuhendisligi. /mekatronikfrm
|
|
|
- Berk Iskander Heper
- 8 yıl önce
- İzleme sayısı:
Transkript

1 MEKATRONİK /mekatronikmuhendisligi /mekatronikfrm

2 Dergimizin bu sayısında, mekatronik bölümü alanında okuyan veya bu alana ilgi duyanların ufkunu açmak ve ne tür projeler geliştirebileceklerini göstermek amaçlı çeşitli projeler yer almaktadır. Erciyes Üniversitesi Mekatronik Mühendisliği Bölüm Başkanı Sayın Prof.Dr.Şahin YILDIRIM başta olmak üzere dergimizde yer alan yazar arkadaşlarımıza verdikleri emeklerden dolayı teşekkür ederim. Umarım sizin için bilgilendirici ve okuması zevkli bir dergi olur. Saygılarımla. Fahri Yasin AYAS
3 Gelişmekte olan robot teknolojisi ile birçok bilimsel faaliyet teknolojik ürünler üzerinde bütünleşebilmektedir. Robotlar, canlıların işlev ve yaşam biçimlerini taklit eden; programlanabilir yetenek ve zekâya sahip, gelişmiş ve disiplinler arası öğeler içeren mekatronik sistemlerdir. Bilimsel ve teknolojik olarak disiplinler arası çalışmalar içeren robot teknolojisi ile ilgili çalışmalar özellikle son yıllarda dünyadaki gelişmelere paralel olarak ülkemizde de ivme kazanmıştır. Bu proje; ülkemizde sağlık sektöründe bir avantaj olması hedefi ile, çok yoğun bir tempoda çalışan hemşirelere ve hasta bakıcılara günlük çalışmalarında destek sağlayacak, Hastaya Yardımcı bir Mobil Robot (HAYAMOR) tasarlamayı, üretmeyi ve yapay sinir ağı ile yörüngesini analiz etmeyi amaçlamaktadır. Ayrıca bilim ve teknoloji alanlarına odaklanmış konularda, disiplinler arası araştırma ve geliştirme yapılarak insan gereksinimlerini sağlayabilecek şekilde hizmet verecek, toplumda farklılık sağlayacak bir çalışma hedeflenmektedir. Robotik sistemlerin önemli bir diğer yönü de, var olan uygulamalara ek olarak yeni çözümler geliştirebilmesidir. Hem gündelik yaşantımızda, hem de endüstriyel sistemlerde mobil robot teknolojisinin uygulanabileceği birçok boşluk olduğu söz konusudur. Önerilen proje ile mobil robot teknolojisinde yüksek imkan ve kabiliyete sahip, donanım, yazılım alt yapısına sahip ileri seviyeli uygulamaların ülkemizde yaygınlaşması sağlanacaktır. Sağlık sektöründe ilerleyen teknolojik imkanlara rağmen, hastalara ve hasta yakınlarına halen ilgisizlik ve bilgi verme eksikliği gösterilmektedir. Bunun yanında yanlış teşhis ve hatalı ilaç tedavisi gibi istenmeyen durumlar ortaya çıkabilmektedir. Bunun nedeni şüphesiz, sağlık personelinin aşırı yoğun bir çalışma temposunda olmasından dolayıdır. Özellikle gece nöbetinde hemşire ve hastabakıcının verimi %30-40 oranında düşmektedir. Bunun yanında sağlık personelinin yetersizliği veya sağlık personelinin özel muayenehaneler açmasından kaynaklanan bazı olumsuzluklar ortaya çıkabilmektedir. Bu çalışmada, ülkemizde uygulaması ilk olacak, hastaya kendine ait olacak ilaç takdimi yapabilen, moral verici bir mobil robot tasarlanıp üretilecek ve yapay sinir ağı ile yörünge analizi gerçekleştirilecektir. Robot üzerine yerleştirilecek dokunmatik panelde, insanların kolay bir şekilde kullanabilmeleri için hastalara ait isimler ve okuma yazma bilmeyenler için hastaların kendi fotoğrafları bulunacaktır. Bu sistem özellikle, düzenli olarak ilaç verilmesi gereken, rahat yatıp kalkabilen ve bilinci yerinde olan hastaların hizmetinde görev alabilecektir. HAYAMOR

4 Bu makalemde Raspberry Pi geliştirme kartı ile web üzerinden GPIO nasıl kontrol edilir bundan bahsedeceğim. WebIOPi Nedir? WebIOPi Raspberry Pi üzerinde Web üzerinden bir tarayıcı yardımıyla GPIO kontrolü yapmanızı sağlayan bir pakettir.bu paket sayesinde rahatlıkla ev otomasyon sistemleri,uzaktan web kontrollü robotik projeler gerçekleştirebilmektesiniz. Nasıl mı? O halde başlayalım. Raspbian üzerine WebIOPi kurulumu Raspbian Raspberry Pi için geliştirilmiş Linux tabanlı bir işletim sistemidir.raspbian üzerine WebIOPi kurulumu ise şu adımlarla yapılır. Paketimizi Buradan indiriyoruz ve /home/pi dizinine atıyoruz.daha sonra terminali açıyoruz sırasıyla: tar xvzf WebIOPi tar.gz yazarak dosyaları çıkarıyoruz. cd WebIOPi yazıyoruz. Burada sizin indirmiş olduğunuz sürümdür. Eğer daha eski bir sürüm indirdiyseniz numaraları değiştiriniz. Daha sonra terminale sudo./setup.sh yazıyoruz. Bu komutla birlikte WebIOPi ımız Raspberry Pi ye kuruldu.şimdi şu komutla WebIOPi yi başlatalım: sudo/etc/init.d/webiopi start ve WebIOPi ımız başladı. Terminale ip addr yazarak raspberry Pi nin local İP sini öğrenelim. Local IP niz x şeklinde olur. Buradaki x değişebilir. Şimdi aynı wifi a bağlı herhangi bir bilgisayar,cep telefonu veya tabletten bir tarayıcı açalım ve adres çubuğuna x:8000 yazalım. Burada Raspberry Pi miz modemimizin 8000 nolu Portunu kullanmakta.girerken sizden kullanıcı adı ve şifre isteyecek. kullanıcı adı: raspberry şifre: webiopi olarak ayarlanmıştır.bu şifre base64 ile kriptolanır.yani şifreniz korumalıdır.ayrıca bu kullanıcı adı ve şifreyi kendimize özgü olarak yapabilmekteyiz

5 Eğer kullanıcı adı ve şifreyi doğru şekilde girdiyseniz sizi aşağıdaki gibi ekran karşılayacaktır. Görmüş olduğunuz gibi WebIOPi ekranımız Raspberry Pi nin pinleriyle beraber görünüyor.burda Raspberry Pi nin Pinlerinin çıkışlarına birer LED bağlarsanız ve pin numaralarının üstüne tıklarsanız LED lerin yandığını göreceksiniz. WebIOPi ı başlangıçta başlatmak istiyorsanız yani sürekli komut yazarak başlatmak istemiyorsanız: sudo update-rc.d webiopi defaults yazmanız yeterli. Giriş Kullanıcı adı ve Şifremi Nasıl Değiştiririm? Kullanıcı adı ve şifrenizi değiştirmek için terminale: sudo webiopi-passwd yazmanız yeterli. Komutu yazdığınızda Enter Login: Enter Password: Confirm password: belirecektir. Enter Login kısmına Kullanıcı Adı Password kısmına yeni şifrenizi girerek giriş bilgilerinizi değişebilirsiniz. WebIOPi Arayüzünü Kendimize Göre Düzenleyebilir miyiz? Evet düzenleyebiliriz. Ancak bunu yapabilmek için JavaScript,HTML,CSS ve Python bilginiz olması lazım. Çünkü WebIOPi temelinde Python ve C, web arayüzünde JavaScript, HTML, CSS barındırır. Arayüzü değiştirebilmek için bir adet HTML ve bir adet Python scripti yeterli.
6 WebIOPi İle Basit Bir Ev Otomasyon Sistemi Yapalım Sistemimizde evimizde bulunan lamba sabah 8 sönecek akşam 6 da yanacak şekilde ayarlayalım.bunu Yapabilmek İçin /home/pi dizinine projem isimli bir klasör oluşturalım.klasörümüzün içinde hem python scriptimiz hemde HTML dosyamız bu klasörde olacak. HTML dosyamızı arayüz.html olarak oluşturalım python scriptimiz ise python.py olsun. HTML dosyamızı açıp içine: <!DOCTYPE html PUBLIC "-//W3C//DTD HTML 4.01 Transitional//EN" " html4/loose.dtd"> <html> <head> <meta http-equiv="content-type" content="text/html; charset=utf-8"> <title>webiopi Lamba Kontrol</title> <script type="text/javascript" src="/webiopi.js"></script> <script type="text/javascript"> webiopi().ready(function() { // GPIO 17 için Lamba İsimli Bir Buton oluşturduk. var button = webiopi().creategpiobutton(17, "Lamba"); jquery ile Controls isimli yapı oluşturduk $("#controls").append(button); webiopi().refreshgpio(true); }); </script> <style type="text/css">// Butonun en boy renk ayarları yapılıyor. button { display: block; margin: 5px 5px 5px 5px; width: 160px; height: 45px; font-size: 24pt; font-weight: bold; color: white; } #gpio17.low { background-color: Black; } #gpio17.high { background-color: Blue; } </style> </head> <body> <div id="controls" align="center"></div> </body> </html>
7 Pyton Scriptimiz ise şu şekilde olacak: import webiopi import datetime GPIO = webiopi.gpio LIGHT = 17 HOUR_ON = 8 HOUR_OFF = 18 def setup(): GPIO.setFunction(LIGHT, GPIO.OUT) now = datetime.datetime.now() if ((now.hour >= HOUR_ON) and (now.hour < HOUR_OFF)): GPIO.digitalWrite(LIGHT, GPIO.HIGH) def loop(): now = datetime.datetime.now() if ((now.hour == HOUR_ON) and (now.minute == 0) and (now.second == 0)): if (GPIO.digitalRead(LIGHT) == GPIO.LOW): GPIO.digitalWrite(LIGHT, GPIO.HIGH) if ((now.hour == HOUR_OFF) and (now.minute == 0) and (now.second == 0)): if (GPIO.digitalRead(LIGHT) == GPIO.HIGH): GPIO.digitalWrite(LIGHT, GPIO.LOW) webiopi.sleep(1) def destroy(): GPIO.digitalWrite(LIGHT, GPIO.LOW) Kaydettikten sonra Terminali açıyoruz ve sudo nano /etc/webiopi/config yazıyoruz.karşımıza çıkan ekranda doc-root = /home/pi/myproject/html Buna benzer bir satır olacak hemen başındaki # işaretini kaldırıp orayı şu şekilde değiştirelim : doc-root = /home/pi/projem Daha sonra: myproject = /home/pi/myproject/python/script.py Bu satırı da bulup başındaki # işaretini kaldırıyoruz.bu satırı ise şu şekilde değişelim: projem = /home/pi/projem/python.py Basit Otomasyon Projemiz bitti nasıl görünüyor hemen bakalım. Terminale: sudo webiopi -d -c /etc/webiopi/config yazıyoruz ve bir tarayıcı açarak adres çubuğuna : x:8000 yazıyoruz ekranımız şu şekilde olacaktır.
8 Lambamız artık akşam 6 da açılıp sabah 8 de otomatik olarak kapanacaktır. Gördüğünüz gibi çok basit bir sistem.. WebIOPi Global İP Kontrol Yapılabilir Mi? Evet mümkün. Modeminizin arayüzüne girin yani tarayıcıya veya yazarak modem kullanıcı bilgilerini girin. Daha sonra NAT>Sanal Sunucuyu bulun buraya İp Adres kısmına Raspberry Pi nin İP sini Port kısımlarına ise 8000 yazın. Daha sonra kaydedin. Şimdi global İp adresiminizi sitesinden öğrenelim örneğin ip adresimiz: gibi bir ip adresi olacak.hemen farklı bir cihazdan örneğin cep telefonunuzdan GSM i açarak internete bağlanın ve tarayıcıya :8000 yazın webiopi ye giriş yaptığını göreceksiniz. Elektrik kesintisi veya modemin kendisini resetlemenize karşı olarak webiopi yi mac adresi ile sabit bir İP ye yönlendirmenizde fayda var.bunun dışında eğer global IP nizinde değişmesini istemiyorsanız.internet sağlayıcı şirketle iletişime geçerek cüzi bir miktar karşılığında bunuda yaptırabilmektesiniz. WebIOPi Robotik Çalışmalarda Nasıl Kullanılır? Şuan okul destekli arazi keşif robotu projesinde kullanıyorum..çalışma prensibi ise 3g ile internete bağlanıyor ve üzerinde bulunan WebCam aracılığıyla etrafını kontrol ederek görüntüyü WebIOPi ye aktarıyor. Aynı zamanda motorların PWM kontrolü yapılabilmekte.çeşitli sensörlerin kullanımını destekliyor. Ayrıca Google Maps adaptasyonu üzerinde çalışmaktayım. WebIOPi ni robotik Alanlı Çalışmaları bir sonra ki sayımızda yer alacaktır. Görmüş olduğunuz gibi WebIOPi ile otomasyon ve robotik projelerinizi rahatlıkla gerçekleştirebilirsiniz.kaynak olarak şu videodan faydalanabilirsiniz hem yükleme hem de çalışmasını göstermekte. İyi Çalışmalar Fahri Yasin AYAS
9 Kendinizi biraz tanıtır mısınız? Adım Eyüp Ateş, 19 yaşımdayım. Aslen Kastamonuluyum, İstanbul'da yaşamaktayım. Tasarım başlangıcım çok küçük yaşlara dayanıyor. Yaklaşık 7-8 yaşımda arkadaşlarım mahalle arasında oynarken ben iki sokak ötede tek tezgahlı torna atölyesinde çalışmaya başladım. Liseye başlamadan önce teknik anlamda bilgim biçimlenmeye başladı. Küçük büyük şirketlerde hem üretim hem arge depatmanlarında çalıştım. Liseyi yine teknik bir bölümde okudum, üniversite eğitimime devam etmekteyim. Bendeki yetenek fark edildikten sonra kendimi Türkiye'nin en iyi tasarımcılarıyla birlikte milli projelerin içinde buldum. Bu aşama çok zahmetli oldu. Lise yıllarımda teknik bir üniversitenin öğrencileriyle birlikte uçak-uzay eğitimi aldım, onlarla birlikte fuarlara katıldım, stantlarda görev aldım. Sosyal medyayı iyi kullanabilmek için kendi mesleğimle alakalı siteler ve sayfalar kurdum. Hatta bu sayfaların birinde şu anda yaklaşık 75 bine yakın bir üye bulunmaktadır. Hem işte hem okulda, hem de sosyal medyada sürekli tasarımları, mekanik üretimleri inceleyerek ve piyasa yoklaması yaparak, networking ağı oluşturarak kendimi geliştimeye hedefledim. Birçok projede adımın geçmesi için yorgunluk lafını bir kenara atıp elimden geldiği kadar her projeye faydam olsun diye çabalamaktayım. Yaptıklarımın karşılığını her geçen gün aldığımı bilmek beni daha hırslı, daha istekli ve daha azimli kılıyor yılında Türkiye'nin en girişimci genç yıldızlarından biri seçildim. Usta-çırak kültürüyle yetişip hem bildiğimi öğretip hem de bilgiye aç olduğumu göstererek bir şeyler öğrenmek istediğimi gösterdim. Amacım, hayallerimin peşinden giderek ülkeme faydalı işler yapmak; yoruldum, bıktım sözlerini rafa kaldıran insanlardan olmayı ilke edinmektir.
10 İlk tasarım fikri ve tecrübe başlangıcı nasıl oluştu? Lise yıllarımda bir otomotiv kalıp fabrikasında çalıştım. Fabrika evime epey bir uzaktı. Fabrikaya gidiş gelişim her gün yaklaşık beş saati bulurdu. Burada stajerlik yapıyordum. Piyasa şartlarına göre çok büyük ölçekli tezgahların ustaları tarafından eğitime tabii oldum. Evde, intenette araştırma yaparken bir oyuncak bana ilham kaynağı oldu. Yaklaşık sekiz kişilik bir ekip kurarak zırhlı bir araç oluşturmaya başladık. Özel bir gazetede ve bazı sitelerde çıkan haberler ile profesyonel tasarım çevrem o zaman oluşmaya başladı. Halen o ekipten beş kişi ile elektrikli otomobil çalışmalarımızı sürdürmekteyiz. Sınır 6x6 zırhlı araç projesinden bahsedebilir misiniz? Savunma sanayi alanında zırhlı araç üretimi gerçekleştiren bir firmanın uluslararası bir yarışma düzenlemesi ile ben de kendimi bu yarışmanın içinde buldum. İsmi tasarım noktasında son ürün anlamını taşımakta ve ailemden bir üyenin böyle bir ismi seçmesi ile oluştu. Bu projeyi yaklaşık üç ay gibi bir sürede oluşturdum ve benim için zırhlı araçlarda bir tecrübe oldu. Tasarımlarınızda ve Sınır'da tasarım aşamasında kullandığınız yazılımlar neydi ve öğrenme aşamalarınız nasıl gerçekleşti? İlk olarak küçük bir atölyede çalıştığım için 14 yaşıma kadar herhangi bir yazılım ismi duymadım. İlk öğrendiğim program Autocad, daha sonra Solidworks'tü. Şu an yaklaşık dünya çapında duyulmuş dokuz programı kullanmaktayım. Mekanik tasarım yaptığımdan dolayı parametrik olmayan herhangi bir yazılım kullanmadım. Reklam karşılığı ile programları öğrendim. Yeni öğreneceklere tavsiyem eğer mekanik tasarımcıysalar üretim ortamını görmeden tasarım boyutuna hemen geçmesinler, zira bir şeyler hep yarım kalacaktır. Eğer ikisini de birlikte götürürler ise hayal gücüyle birlikte güzel işler yapabileceklerine inanıyorum. Sektörde ağırlığını koyan bazı yazılımlar var ve her birinin seçilmesinde farklı etkenler bulunmaktadır. Kobi firmalarını ele alırsak makine üretiminde hızlılık yönünden Solidworks, yüzey yönünden kalıpçılar için Siemens Nx ön plana çıkıyor. Proje firmaları kullanıcıları ise otomotiv ve savunma ağırlıklı olarak Catia kullanmaktadır. Sınır aracının tasarımını yaparken benim ağırlıklı olarak kullandığım Catia oldu. Hızlılık yönüden Solidwork ve Nx programlarını kullandım. Tasarım yaparken aracın mekanik dayanımları da önemlidir. Bunun için analizleri Simxpert Nastran ile oluşturdum. Yaklaşık dört ana programı ve diğer programları kullandım. Tek programla da yapabilirdim fakat hem pratikliği hem de işlem hızlılığı sayesinde böyle bir yol izledim.
11 Geleceğe yönelik hedefleriniz nelerdir? Gelecek hakkında önceliğimin otomotiv ve savunma alanı olduğunu belirtmek isterim. Ülkem tarafından aday gösterilip dünyanın en iyi tasarımcısı olmak isterim. Şimdilik imkansız gibi görünse de elbet bir gün gerçekleşeceğine inanıyorum. İnsanlara faydalı işler yapabilmek en büyük hedeflerimden birisidir. Dükkanı süpürürken bile burası çok temiz olmalı diye hedef koyan biriyim. Tasarım alanında yolun başında olduğumu biliyorum. İleri dönemlerde hedeflerimi daha da yükseğe taşımaya niyetliyim. Lisans eğitimimi de bitirdikten sonra zamana ve duruma göre kendi projelerimin CEO'su olmak istiyorum. Yaptığım işlerde hem kendi adımı hem de ekibimi ve ülkemi dünyada tanıtmak istiyorum. Sınır tanımayan bir genç der ki: "Sende iş varsa, sana her zaman iş var."

12 Günümüz sensör teknolojisi oldukça ilerledi.artık hiçbir şeye dokunmadan istediğimiz eşyaları kontrol etmek mümkün hale geldi.işte bu yazımızda Neurosky firmasının maindwave başlık seti ile arduino arasında bir iletişim kurarak birşeyler kontrol etmeye çalışacağız. Mindwave beyin sinyallerini okuyarak bluetooth üzerinden farklı bir ortama aktarmak için geliştirilmiş bir set.beynin farklı bölgelerinde farklı elektriksel sinyallerini frekanslarını okuyabiliyor. Bunlara EEG (Elektroensefalografi) sinyali deniyor.bu işlem halk arasında ki tabiri ile Beyin elektrosu çekme diye geçer. Projemizde kullanacağımız malzemeleri şöyle sıralayalım ; 1- Neurosky mindwave başlık seti 2- Arduino UNO 3- HC05 Bluetooth modülü Görsel - 1, Devre Bağlantı Şeması Bağlantılarımız yukarıda görüldüğü gibidir.şimdi Arduino için kodlarımızı yazmaya başlayalım.öncelikle bluetooth modülümüz için seri portumuzu tanıtalım. #include <SoftwareSerial.h> SoftwareSerial bt(2,3); // RX TX Daha sonra setup kısmına geçelim.. void setup() { for(int i=4;i<=13;i++) pinmode(i,output); Serial.begin(9600); bt.begin(9600); bt.write("at+role=1\r\n"); delay(500); bt.write("at+link=2068,9d,b8cab4\r\n"); }
13 Öncelikle for döngüsü içinde 4 ten 13e olan pinleri çıkış olarak tanımladık. Daha sonra USB ve bluetooth modülümüzün baudrate ayarlarını girdik. HC05 in öntanımlı baudrate ayarı 9600 olması gerek. (Farklı olan modüllerde mevcuttur.) Daha sonra at+role komutu ile modülümüzü master moduna aldık. At+link komutu ile de bağlanacağımız cihazın MAC adresini giriyoruz. (Mindwave MAC adresini bilgisayar ile eşleştirerek veya cep telefonunuz ile eşleştirerek öğrenebilirsiniz. ) int oku(){ while(!bt.available()); int a = bt.read(); return a; } Şimdi gelen veriyi tek bayt okumak için bir fonksiyon oluşturalım... Oku adında bir fonksiyon oluşturduk.. while döngüsü içinde veri gelene kadar bekliyoruz. Veri geldiği zaman gelen verinin 1 bayt okuyoruz ve return ile döndürüyoruz. Şimdi programımızın ana kısmına geçelim... void loop(){ if(oku()==170){ if(oku()==170){ uzunluk= oku(); if(uzunluk > 169) return; for(int i=0;i<uzunluk;i++){ veri[i] = oku(); kontrol+=veri[i]; } byte k = oku(); kontrol = 255-kontrol; if(k==kontrol){ for(int i=0;i<uzunluk;i++){ switch(veri[i]){ case 0x02: i++; sinyal = veri[i]; break; case 0x04: i++; odaklanma = veri[i]; break; case 0x05: i++; rahatlik = veri[i]; break; case 0x80: i=i+3; break; case 0x83: i++; i = i+veri[i]; break; } }
14 Serial.print ("Sinyal : "); Serial.println(sinyal); Serial.print ("Odaklanma : "); Serial.println(odaklanma); Serial.print ("Rahatlık : "); Serial.println(rahatlik); Serial.println(" "); }}} int m = round(attention/10); if(m>1 && m<11){ Serial.println(m); for(int j=4;j<=13;j++) digitalwrite(j,low); delay(200); for(int i=4;i<=(m+3);i++) digitalwrite(i,high); } } Yukarıda ki şekilde gelen verinin hangi sıra ile geldiği gösterilmektedir. İlk 3 bayt başlık baytı olarak nitelendirelim. Bunun ilk 2 baytı 0xAA(Desimal 170) tir. Bu veri paketinin başladığını gösterir. if(oku()==170){ if(oku()==170){ uzunluk= oku(); if(uzunluk > 169) return; Yukarıda programda arka arkaya 2 bayt okuduk.bunlar 170 ise pakedimiz başlamış demektir. 3. Bayt ise veri kısmının uzunluğunu verir. Bu en fazla 169 olmak zorundadır.burada 3. Baytı okuyup kontrol ediyoruz. Eğer 169 dan küçük ise yolumuza devam ediyoruz. Daha sonra gelen veri pakedimizi okuyup bir değişkene aktarıyoruz. Bir yandan gelen veriyi toplayarak bir değişkene atıyoruz. Veri pakedinden sonra gelen kontrol değeri, gelen verinin, byte k = oku(); kontrol = 255-kontrol; if(k==kontrol){ for(int i=0;i<uzunluk;i++){ veri[i] = oku(); kontrol+=veri[i]; } toplamının tersidir. Bu sayede gelen verinin sağlıklı gelip gelmediğini kontrol edeceğiz. Son gelen baytı yani kontrol değerimizi okuyup topladığımız veri değerinin tersi ile karşılaştırıyoruz. Eğer gelen verimiz doğru ise ayıklama işlemine başlayacağız.
15 Bu tablomuza göre parçalama işlemi yapalım. 0x02 den sonraki gelen değerimiz tek baytlık bir değer. Bu değer bize sinyal kalitesini verecek. Daha sonra odaklanma(attention) ve rahatlık (meditation) değerlerimizi aldık. Bu yazımızda diğer veriler ile ilgilenmeyeceğiz. Eğer kullanacaksanız aşağıdaki tablodan faydalanabilirsiniz. for(int i=0;i<uzunluk;i++){ switch(veri[i]){ case 0x02: i++; sinyal = veri[i]; break; case 0x04: i++; odaklanma = veri[i]; break; case 0x05: i++; rahatlik = veri[i];
16 Daha sonra aldığımız değerleri USB üzerinden bilgisayarımıza gönderip oradan görebiliriz. int m = round(attention/10); if(m>1 && m<11){ for(int j=4;j<=13;j++) digitalwrite(j,low); delay(200); for(int i=4;i<=(m+3);i++) digitalwrite(i,high); } Aşağıdaki kodumuzla odaklanma değerimizi LED lerde seviye olarak göstereceğiz. Herkese kolay gelsin
17 Salih KESKİN Çağımızın en önemli kavramlarından birisi inovasyon. Özelliklede iş dünyasında inovasyona ihtiyacım yok diyecek bir tane işletme göstermek mümkün değil. İnovasyon bu kadar önemliyken küçük ve orta boy firmaların en çok merak ettikleri şey inovasyonun nasıl yapılacağı. Evet, inovasyon nasıl yapılır? İnovasyon iki türlü yapılabiliyor: Dikeylemesine ve Yataylamasına 1- Dikeylemesine inovasyon: Bilginin dikeylemesine geliştirilmeside diyebiliriz buna, yani Ar-ge departmanı. AR-GE departmanı daha çok büyük ölçekli firmaların içersinde bulunan bir departman. AR-GE departmanında belli konularda veya belli bir alanda o güne kadar hiç üretilmemiş yeni bilgilerin üretilmesi hedefleniyor. Ve aynı zamanda var olan ürünlerin geliştirilmesi. Tabii AR-GE sofistike bir iş. İşi bilenlerin içersinde görev almasıyla ancak mümkün yürütülmesi. Pahalı bir işten bahsediyoruz ve de çıktılarına dönük belirsiz bir zamandan tabii ki. Ne kadar süre içersinde ürün geliştirileceği ve de yeni bir ürünün tasarlanacağını kestirme imkânı yok. Onun için istikrarlı bir devamlılık arz etmek durumunda. Örneğin bugün otomotiv, teknoloji, ilaç, bilişim firmaları yılda 7-8 milyar doları AR-GE ye yatırıyor. Yine bu gün dünyanın rekabet avantajını ancak bir AR- GE anlayışına önem veren ülkeleri elde etmektedirler. Dünyada artık her satılan ürünün içersinde belli oranlarda AR-GE payı bulunmaktadır. İçersinde AR-GE olmayan bir firmanın şu anda rekabet ediyor idiyse dahi orta vadede bu rekabete devam etmesi pek mümkün gözükmüyor. Peki AR-GE departmanı kurumayan firmalar ne yapacaklar. İşte inovasyon yapmanın ikinci yolu onlara hitap etmektedir. 2- Yataylamasına İnovasyon: Buna aynı zamanda bilgi kaldıraçlama veya çapraz eşleştirme de denir, Var olan bilginin başka bilgilerle kaynaştırılması veya ondan başka bir alıntı şeklinde yapılan İnovasyon yataylamasına inovasyonu oluşturur. Yani; bir sektörün başka bir sektörden esinlenip yeni model yaratması. Veya bir ürünün faklı bir sektördeki üründen esinlenerek yeni bir eşleşme yani özellik kazanması demektir. Örnek: Macar bir mühendis tarafından bulunan cırt fermuarı da bir örnektir. Tekstilde ve farklı sektörlerde kullanılan bu fermuarlar Macar bir mühendisin tarlalarda gezerken çorabına yapışan dikenli otlardan esinlenip ortaya çıkardığı bir üründür. İkinci örnek Toyota: Toyota üretim anlayışında gerçekleştirdiği tam zamanında üretim uygulamasını, Amerikan süpermarketlerden esinlenerek gerçekleştirmiştir. Toyota nın patronu Amerika da bir gün markete gidiyor ve ürün sayısına bakarak stokların hiç tükenmediğini görüp depolarının çok büyük olup olmadığını soruyor depoyu görmek istediğini söylüyor. Fakat depo yok, malın tükenme hızına bakıp, telefonla sipariş veririz, mal hemen gelir cevabını alınca da kafasında bir kıvılcım çakıyor. İşte bu kıvılcım daha sonra otomotivde çığır açan üretim sisteminin oluşmasına yol açıyor. Süpermarketlerdeki modelden otomotiv sektörüne çapraz bir eşleşeme yapılmış oluyor.
18 Üçüncü örnek, kalıcı makyaj malzemesi: Bir makyaj firması da otomotiv sektöründe kullanılan elektrostatik boyanın kolay çıkmadığını görüyor ve bunun acaba kendi sektöründe uygulanıp uygulanamayacağını düşünerek hayata geçirdiği bir ürün anlayışıdır. Böylece kalıcı makyaj malzemesi üretiliyor. Bu seferde otomotiv sektöründen kozmetik sektörüne bir çapraz eşleştirme yapılmış oluyor. Yine köpekbalığı derisindeki dişçikler ünlü mayo firmasının Speedo nun sürtünmeyi azaltıp hızı arttıran Fantastik mayosuna ilham kaynağı olmuş bir üründür. Hayvan türleri araştırmacılara her alanda ilham kaynağı olmuştur. Hala da olmaya devam etmektedir. Yataylamasına inovasyon bir firmanın konuya ilgili olan veya bir fiil ilgili olan kişilerinin yapması gereken bir çalışmadır. Bunu yaparken kendi ürünlerinin özelliklerini çok başlıkta çıkartmaları gerekir. Daha sonra bu özellikleri yine çok farklı sektörlerden ürünlerin özelliklerini çıkartmak ve iki ürünün özelliklerini birbirleriyle karşılaştırarak çapraz eşleştirme tekniğini uygulamış olurlar. Bu teknikte önemli olan şey, ürünlerin özellikleri ne kadar çok çıkartılırsa o kadar eşleştirme yapma ihtimali ortaya çıkacağıdır. Böyle bir çalışmayı profesyonelce yapmak için öncelikle işin tekniği öğrenmek gerekir. Bu amaçla bazı kaynakların okunması gerekir. Çok değil üç veya dört kitap okumayla yataylamasına inovasyon yapma tekniği öğrenilebilir. Ya da bunun bir eğitimine gitmek doğru bir yöntem olacaktır. Şu iyi bilinmelidir ki inovasyon yapmanın yolu sadece Ar- Ge departmanından geçmez. Hatta inovasyon demek AR-GE demek de değildir. Kısaca AR-GE daha teknik bir tanımlama iken inovasyon firmanın tüm süreçlerini içersine alan bir yaklaşımdır. Bir bakış açısı ve de bir tutumdur. Ayrıca firmanın en tepesinden başlayan bir kararlılığı gerektirir. İnovasyon yapmak için beyaz yakalılara verecek bütçesi olmayan firmalar için yataylamasına inovasyon oldukça önemli bir açılım sunmaktadır. Yine iyi bilinmelidir ki, bu çalışma sürecinde ortaya mutlaka bir yenilik çıkmak zorunda değildir. Fakat bu zihinsel jimnastikler firmanın ağırlaşmış reflekslerini tazeleyecek ve bakış açılarına işlerlik kazandıracaktır.

19 EMRE LEBLEBİCİOĞLU Güneş panelleri gelen güneş ışınımını üzerinde bulundurduğu yarı iletken güneş hücreleri vasıtasıyla elektrik enerjisine dönüştüren sistemlerdir. Güneş hücreleri üzerine düşen foton hücre yapısındaki elektronları katmanlar arası geçiş yapmasını sağlar. Elektronun bu hareketiyle de akım oluşur.bir güneş panelinden elde edilebilecek güç panel üzerine düşen ışınım yoğunluğuna bağlıdır. Güneşin gün içerisindeki konumu sürekli değiştiğinden güneş panelleri üzerine günün her saati yeteri kadar ışınım düşmez buda panel verimliliğini düşürür. Bu sorunu ortadan kaldırmak içinse güneşin geliş açısına göre hareket eden güneş takip sistemleri kullanılır. Güneş enerji sistemlerinde düşük verimliliğin belli başlı sebepleri vardır. Bunlar; Güneş ve Dünya'nın gün içerisindeki hareketinden dolayı güneş enerjisinden sürekli faydalanamama. Fotovoltaik hücrelerin maksimum verimi güneş ışınları dik geldiği ışınım yoğunluğunun en fazla olduğu zamanda vermeleri. Kötü hava koşullarında istenilen ışınım miktarının elde edilememesi. Eksen sayısına göre; Tek eksende kontrol Çift eksende kontrol Kontrol yöntemine göre; Pasif kontrollü sistemler (kapalı döngü) Aktif kontrollü sistemler (açık döngü) Kullanılan Eksen Sayısına Göre Takip Sistemleri A) Tek Eksenli Kontrol Sistemiyle Güneş Takip Sistemi Tek eksenli kontrol sistemlerinde panel sadece tek eksende hareket etmektedir. Sistemin verimliliği yaklaşık olarak % oranlarında arttırılabilir. Tek eksenli kontrol sistemlerinde eksen doğu-batı hattı üzerinde olup panel kuzeygüney doğrultusunda hareket edebilir. Bundan farklı olarak panel kuzey-güney hattına yerleştirilir ve hareketi doğubatı ekseninde yapabilir. Ayrıca belirli bir eğim açısı ile hareket eden sistemlerde mevcuttur. Görsel 1, Tek eksenli güneş takip sistemi kontrol şeması
20 Görsel 2, Tek eksenli güneş takip sistemi ISIS simülasyonu B) Çift Eksenli Kontrol Sistemiyle Güneş Takip Sistemi İki eksenli kontrol sistemlerinde Güneş'in gökyüzündeki konumunu belirten iki açı değeri ile takip gerçekleştirilir. Bu kontrol sisteminde eksenlerden biri azimuth ekseni, diğeri ise zenith ekseninde hareket etmektedir. İki eksenli kontrol sistemi ile panel verimliliği %30-40 oranlarında iyileştirilebilir. Azimuth ekseni panelin doğu-batı hattındaki hareketinin, zenith ekseni ise panelin yüksekliğinin ayarlandığı eksenlerdir. Görsel 3, Çift eksenli güneş takip sistemi devre şeması
21 Örnek:Tek Eksenli Güneş Takip Sisteminin Arduino İle Kontrolü Arduino Yazılımı : #include<servo.h> Servomyservo; int pos = 90; // başlangıç konumu int sens1 = A0; // LRD 1 pin int sens2 = A1; //LDR 2 pin inttolerance = 2; voidsetup() { myservo.attach(9); // pin 9 a servo nesnesi ekler. pinmode(sens1, INPUT); pinmode(sens2, INPUT); myservo.write(pos); delay(2000); // güneş paneli pozisyon alırken 2 saniye gecikme ekler } voidloop() { int val1 = analogread(sens1); // sensör 1 in değerini okur int val2 = analogread(sens2); // sensör 2 nin değerini okur if((abs(val1 - val2) <= tolerance) (abs(val2 - val1) <= tolerance)) {//tölerans limiti ile değerler arasında fark varsa hiçbir şey yapma } else { if(val1 > val2) { pos = --pos; } if(val1 < val2) { pos = ++pos; } } if(pos > 180) { pos = 180; } // eğer değer yükselirse 180 ne sabitle if(pos < 0) { pos = 0; } // eğer değer yükselirse 0 a sabitle myservo.write(pos); // servonun pozisyonunu yaz delay(50);}
 neticesinde istenilen çıktı organında bir sonuç oluşturur, bu")
22 Mikroişlemci Temelleri ve FPGA Bütün elektronik cihazlar bilindiği üzere 1, 0 lardan oluşur. Peki bu 1 ve 0 (var ve yok) kavramı nedir nasıl kontrol edilir? Kullandığımız elektronik cihazlar üzerine gelen sinyallerin birbiri ile karşılaştırılması ve yorumlanması (elektronik kapılar) neticesinde istenilen çıktı organında bir sonuç oluşturur, bu oluşturulan sonuç bir başka karşılaştırıcı ve yorumlayıcı yapıya gönderilir istenilen verilere ulaşıldığında bize diğer sonuçlar ile birlikte sunulur bu bit kavramını oluşturan temel yapıdır. Örneğin 2 bitlik bir veri yolu 2^2 = 4 farklı sonuç 00,01,10,11 gibi, bize sunulan 2 bitlik bir veri bunlardan biri olacaktır. Bu konular temel elektronik konusu olup içerisinde derinleştikçe derinleşilebilir. Görsel 1, Ve kapısı Transistör İfadesi (solda) ve Diagramı Şekil 1 de verilen ve kapısının transistörler (geçirgeçler) ile yapıldığını görmekteyiz, Ve kapısı temel elektronikte standarttır Ve teknik çizimlerde karmaşıklığa yol açmamak için sağda bulunandiagram ile ifade edilir. Görsel 2, 74HCT08 Entegresi Transistörler 1959 yılında tümleşik olarak kullanılmaya ve entegreleşmeye başladı bunun devamında teknoloji çok hızlı bir hal aldı, işte küçüldü cebimize girdi, akıllı telefonlar falan. Konumuzdan sapmadan devam edelim, yukarıda Ve kapısının kullanılmak üzere entegreleşmiş halini görüyoruz. Bu entegrenin 6 adet giriş ve 4 adet çıkış pini bulunmakta Ve kapısının ihtiyaç olduğu yerlerde tercih edilir ama yapacağınız devrede çok fazla elektronik kapının bir arada bulunması gerekiyorsa bu pek uygun bir tercih olmayacaktır.
23 Görsel 3, Elektronik Kapılar CPLD Entegrasyonu Lojik kapılardan oluşturduğunuz kompleks devremiz çok fazla yer kaplayacağından bunları bir arada programlayabileceğiniz CLPD açılımı ComplexProgrammableLogic Device (Karmaşık Programlanabilir Lojik Cihaz ) teknolojisi ortaya çıkmıştır. Kapılar ve transistörler ile yaptığınız çok karmaşık programları tekbir çip üzerine toplar. Anlaşılacağı üzeri CPLD denilen yapı üzerinde programlayabileceğiniz birçok kapı bunmaktadır. Bu durumda herhangi bir frekans söz konusu olmadığı için yüksek hızlara ulaşmak ve paralel işlem yapmamanız engel yok. Enerji kesildiğinde konfigürasyon bilgisinin kaybolmaması isteniyorsa, hız başlangıcın ihtiyaç olduğu uygulamalarda kullanılır. Sürekli olarak aynı işlemi yapmak üzere sadece 1 defa tasarlanıp piyasaya ürün olarak sunmak için bir çip geliştirmek isteniyorsa ASİC teknolojisini kullanmanız uygun olur açılımı Application SpecificİntegratedCircuit (Uygulamaya Yönelik Entegre Devre) örneğin basit bir çamaşır makinasının içerisinde bulunan elektronik çip ASİC teknolojisi ile üretilmiştir tek seferde binlerce aynı çipten ihtiyaç duyulduğu zaman kullanılır. Bu çipler üretildikten sonra tekrar programlanmaz. Yalnız bir amaç için tasarlanan tümleşik devredir. Seri üretim söz konusu olduğu zaman çok daha ucuzdur. Görsel 4, FPGA Yapısı CPLD ve ASİC kavramlarına değindikten sonra mikro işlemcinin nasıl oluştuğunu ve çalıştığını azda olsa anlamış bulunmaktayız. Şimdi gelelim FPGA nedir ve nasıl çalışır, FPGA açılımı FieldProgrammableGateArray (Alanda Programlanabilir Kapı Dizinleri) Temelde FPGA içerisinde emrinize amade programlanabilir milyonlarca transistör bulunan bir mikrodenetleyicidir.
24 FPGA lar savunma, uzay, tıp, otomotiv, veri şifreleyici ve şifre çözücü gibi yüksek hız ve paralel işlemin söz konu olduğu uygulamalarda tercih edilir. Paralel işlemin kafamızda daha iyi canlana bilmesi için bir örnekle ile meseleyi açalım; örneğin 5 sensörlü bir çizgi izleyen robot yapacağız normal bir robotta sensör taraması yapılacak normal bir işlemci ile sensörleri sırası ile tarama durumu söz konusu. Önce 1. sensör sonra sırası ile 5 e kadar tarama yapılır ve çizginin hangi sensör üzerinde olduğu tespit edilir. FPGA da sensörlerin bağlı olduğu pinlerin herhangi birinde değişim olduğu zaman anında çıkış birimlerinde etkisi görülecektir. ASİC tasarımların çoğunda tasarımcılar fabrikasyona geçmeden önce tasarımlarını önce FPGA üzerinde deneyerek seri üretimden sonra hata ile karşılaşmaları en azaindirger. FPGA lar üzerinde hazır elektronik kapılar bulunduğu gibi, hazır RAM, saat frekansı üretmek için DLL/PLL blokları ve hatta daha gelişmiş mimarilerde işlemci çekirdekleri bile bulunmaktadır. Geliştirici işlemci bloklarını kütüphane şeklinde internetten bulabilir ve bunu FPGA nın içerisine gömebilir mikroişlemcilerin transistörlerden oluştuğunu öğrendik bizimde elimizde milyonlarca transistör olduğuna göre buda mümkündür. FPGA ların avantajlarında biride elektrik kesildiği zaman bilgiyi üzerinde tutması ve enerji geldiğinde işleme devam etmesidir. FPGA yaygın olarak donanım tanımlama dili olan VHDL açılımıveryhighspeedintegratedcircuit Hardware Description Language (yüksek hızlı tümleşik devreler için donanım tanımlama dili) ile programlanır. Xilinx firması tarafından geliştirilen ISEWebPack programı kullanıcılara üç farklı programlama seçeneği sunmaktadır. Şematik programlama, kod ile programlama, akış diyagram şeklinde programlama. Ayrıca şematik olarak yaptığınız tasarımlarınızın VHDL kodlarını ürettirip bundan sonra yolunuza kodları kullanarak da devam etmenize olanak sağlamaktadır. İstediğiniz zaman kod istediğiniz zaman şematik olarak programlama yapabilme esnekliğini bizlere sunmaktadır.
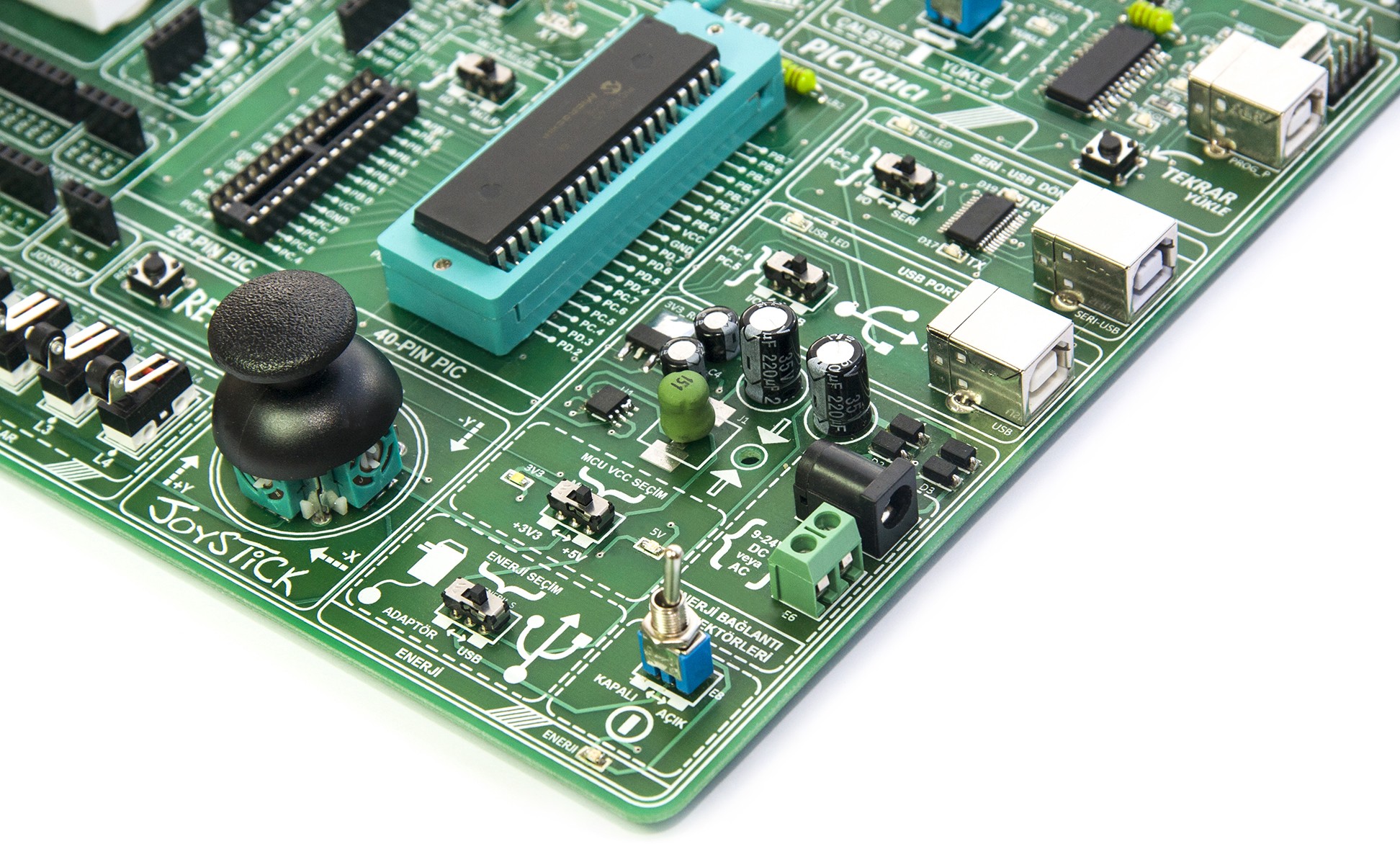
25 PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar için genel amaçlı bir step motor sürücü devresi ve PIC16F877 mikrodenetleyici ile kontrolünü gerçekleştireceğiz. NEDİR? Step Motor ( Adım Motor ), adından da anlaşılacağı üzere dönüş hareketini adım adım şeklinde gerçekleştiren motor tipleridir. İçerisinde bulunan bobinlere uygun sinyaller gönderildiğinde, istenilen yönde, hızda ve açıda hareketlerini gerçekleştirebilir. Motorun bir adımda gerçekleştirebileceği dönme açısını, içerisindeki sarım şekilleri belirler. Yapılarına göre step motorlar beş çeşittir. Bu uygulamamızda en yaygın olarak kullanılan unipolar step motorların sürücü devresi ve kontrolü üzerinde uygulama gerçekleştireceğiz. Unipolar Step Motorlar Unipolar step motorlar piyasada 5 veya 6 uçlu olarak bulunabilir. 5 uçlu motorlarda iki ortak uç motor içerisinde birleştirilerek tek çıkış olarak motor dışarısına aktarılır. 6 uçlu motorlarda ise iki ortak uç ayrı ayrı motor dışarısına aktarılır. Geriye kalan 4 kablo, motor kontrolünde kullanılan bobin uçlarıdır. VCC A B C D VCC Uç TESPİTİ NASIL YAPILIR? VCC BESLEME ORTAK UÇLARI ( 2 VEYA 1 OLABİLİR ) VCC BOBİN A BOBİN B BOBİN C MOTOR KONTROL UÇLARI BOBİN D Motor kabloları üretici firmaya göre farklılıklar gösterdiği için bobin kabloları için renk kullanmadık. 1.ADIM : Ölçü aletini Ohm kademesine aldıktan sonra bütün uçlar arasındaki direnç değeri ölçülür. Arasında eşit direnç değerini gösteren uçlar motorun ortak uçlarıdır. Ölçülen direnç değeri kullanılan motor çeşidine göre farklılıklar gösterebilir. 2.ADIM : Bulunan ortak uçlar enerji kaynağının pozitif ( + ) kutbuna bağlanır. Diğer 4 kablodan herhangi bir tanesi enerji kaynağının toprak ( - ) kutbuna bağlanır ve sabitlenir. 3.ADIM : Geriye kalan 3 kablodan herhangi birisini seçip toprak ( - ) kutbuna bağlanır. Bağlama esnasında step motorda 3 farklı durum gözlemlenir. A) Hareket saat yönünde bir adım şeklinde dönüş oluşturmuş ise bu uç B numaralı bobindir. B) Hareket saat yönünün tersinde olmuş ise bu uç D numaralı bobindir. C) Eğer motorda herhangi bir hareket olmuyor ise bu uç C numaralı bobindir. D) B,C ve D uçları tespit edildikten sonra geriye kalan uç A numaralı bobin olduğu tespit edilir.
26 KONTROLÜ NASIL YAPILIR TEK FAZ UYARTIM : Motor içerisindeki bobinlerden sadece birisinin uyartılarak gerçekleştirilen kontrol şeklidir. Bu kontrol şeklinde gönderilen her bir uyartımda motor bir adımlık dönüş hareketi gerçekleştirmektedir. Hareketin yönü ise uygulanan adım sinyalinden bir sonraki uyartım sinyaline göre belirlenmektedir. SAAT YÖNÜ A B C D ADIM ADIM ADIM ADIM SAAT YÖNÜNÜN TERSi A B C D ADIM ADIM ADIM ADIM Tablo 1, Tek Faz Uyartım Tablosu İKİ FAZ UYARTIM : Bu kontrol yönteminde motorun iki bobinine aynı anda uyartım sinyali gönderilerek dönme hareketi sağlanır.. Bu yöntemle gerçekleştirilen kontrol yönteminde motor tek faz uyartım yöntemine göre daha fazla akım çekmektedir. Ancak, bu yöntemde motor durum tepkileri daha hızlıdır. SAAT YÖNÜ A B C D ADIM ADIM ADIM ADIM SAAT YÖNÜNÜN TERSi A B C D ADIM ADIM ADIM ADIM Tablo 2, İki faz Uyartım Tablosu KARMA FAZ UYARTIM : Tek faz uyartım ile iki faz uyartım yöntemlerinin birleştirilmesi ile oluşan kontrol yöntemidir. Bu yöntemle motor, her uyartımda yarım adım ilerleme gerçekleştirmektedir. Bu yöntem ile daha küçük adım açıları ile motor hareket ettirebilir. SAAT YÖNÜ A B C D ADIM ADIM ADIM ADIM ADIM ADIM ADIM ADIM SAAT YÖNÜNÜN TERSi A B C D ADIM ADIM ADIM ADIM ADIM ADIM ADIM ADIM Tablo 3, Karma Faz Uyartım Tablosu

27 DEVRE ŞEMALARI Regülatör Devresi : Çeşitli akımlarda çalışan step motorlar bulunmaktadır. Bu nedenle bu uygulamamızda yüksek akıma dayanıklı bir regülatör devresi kullanmaktayız. LM2576 regülatör entegresi ile 3 ampere kadar akım çeken step motorları sürebilirsiniz. Bu devreyi sadece step motor sürücü devrelerinde değil, diğer uygulamalarınızda da kolaylıkla kullanabilirsiniz. Girişine minimum +7V DC uygulamalısınız. Bu gerilimi dilerseniz adaptör jack ı dilerseniz klemens üzerinden verebilirsiniz. AÇMA / KAPATMA LM ADAPTÖR 7V 40V KLEMENS uF 25V BOBİN 1N uF 25V +5V 680 Ω Malzemeler LM uF 25V Kırmızı LED Bobin 100uH L1 Enerji LED i 680 Ohm Direnç Açma / Kapatma Anahtarı 2 li Klemens Görsel 1, +5V, 3A Regülatör Devre Şeması Datasheet Link : Adaptör Jack 1N5822 Motor Sürücü Devresi : Malzemeler IRL540N 1K Ohm Direnç 1N4007 Diyot Step Motor Piyasada genellikle hazır kart şeklinde step motor sürücü devreleri bulunmaktadır. Bu uygulamamızda kendi step motor sürücümüzü yapacağız. Her bobin için yüksek akımı destekleyen ve girişi TTL özellikte olan IRL540N Mosfet i kullanılmaktadır. Bu sayede, yüksek veya düşük akımlı motor sürmek için rahatlıkla kullanabilirsiniz. Projelerinizde kullanacağınız step motorun özelliğine göre bu mosfet i değiştirebilirsiniz. B1, B2, B3 ve B4 girişlerine, mikrodenetleyiciden veri göndererek motoru istediğiniz yön, açı ve hızda döndürebilirsiniz. Datasheet Link : IRL540N +5V 1N4007 1N4007 G D S G D S G D S G D S G D S IRL540N +5V +5V 1KΩ 1KΩ 1KΩ 1KΩ B1 B2 B3 B4 Görsel 2, +5V, 3A Step Motor Sürücü Devre Şeması
28 Butonlar V0 RS E DT4 DT3 DT2 DT1 Mikrodenetleyici Step Motor PIC16F877 LCD Mikrodenetleyici ve LCD Devresi : Uygulamamızda mikrodenetleyici olarak PIC16F877 kullanılmaktadır. Eğer elinizde farklı PIC mikrodenetleyiciler var ise, devrenizi düzenleyerek bu projeyi aynı şekilde gerçekleştirebilirsiniz. Uygulamada step motor sürücüsünün girişleri mikrodenetleyicinin PD7, PD6, PD5 ve PD4 portlarına, LCD ise PB7-PB4, PB1 ve PB0 portlarına bağlanmıştır. Menü seçim ve motor çalıştırma gibi fonksiyonları gerçekleştirmek için ise 1, 2 ve GERİ/ÇALIŞTIR butonları, PC3, PC2 ve PC1 portlarına bağlanmıştır. +5V 4Mhz 22pF RESET +5V 22pF 1 10KΩ BT3 BT2 BT1 B1 B2 +5V 1 MCLR 40 PB7 PA0 PB6 PA1 PB5 PA2 PB4 PA3 PB3 PA4 PB2 PA5 PB1 PE0 PB0 PE1 VCC PE2 GND VCC PD7 GND PD6 OSC1 PD5 OSC2 PD4 PC0 PC7 PC1 PC6 PC2 PC5 PC3 PC4 PD0 PD3 PD1 20 PD Ω 16 B4 B3 10 kω +5V DT4 DT3 DT2 DT1 E RS +5V LCD_POT V0 PB.4 PB.5 PB.6 PB.7 PB.1 PB.0 PD.0 PD.1 PD.2 PD.3 PC.1 PC.2 PC.3 LCD için DT1 DT2 DT3 DT4 E Step Motor için Butonlar için RS B1 B2 B3 B4 BT3 BT2 BT1 Y O N ( 1 ) H I Z ( 2 ) G E R İ / C A L I S T I R S E C İ M Y A P I N I Z 4X20 KARAKTER LCD Malzemeler PIC16F877 4X20 Karakter LCD Push Buton 4Mhz Kristal 22pF Kondansatör 10K, 51 Ohm Direnç +5V 10KΩ BT1 +5V 10KΩ +5V 10KΩ BT2 BT3 1 2 GERİ / ÇALIŞTIR Görsel 3, Mikrodenetleyici Bağlantı Devre Şeması
29 Device = 16F877 ' Kullanılan Mikrodenetleyici XTAL 4 ' Çalışma Frekans Değeri Declare LCD_DTPIN PORTB.4 ' Data portlarının başlangıç biti Declare LCD_ENPIN PORTB.1 ' Enable bitinin bağlu olduğu port Declare LCD_RSPIN PORTB.0 ' Reset bitinin bağlı olduğu port Declare LCD_INTERFACE 4 ' LCD 4 bit çalıştırılmaktadır Declare LCD_LINES 4 ' LCD 4 satırdır DelayMS 250 ' 250mS Bekle Cls ' LCD Ekran temizlenir TRISD = % ' Mikrodenetleyicinin D portunun tüm bitleri çıkış TRISC = % ' Mikrodenetleyicinin C portunun tüm bitleri giriş Dim HIZ As Word ' HIZ değişkeni Word boyutunda tanımlanır Dim YON As Bit ' YON değişkeni Bit boyutunda tanımlanır Symbol BUTON1 = PORTC.3 ' PORTC.3 yerine programda BUTON1 sembolü kullanılacak Symbol BUTON2 = PORTC.2 ' PORTC.2 yerine programda BUTON2 sembolü kullanılacak Symbol GERI_CALISTIR = PORTC.1 ' PORTC.1 yerine programda GERI_CALISTIR sembolü kullanılacak YON = 1 ' Ġlk ayarlanan yön SAĞ HIZ = 100 ' Ġlk ayarlanan motor hızı 100ms/adım BASLA: If GERI_CALISTIR = 1 Then GoTo ANA_MENU GoTo BASLA ANA_MENU: PORTD = %0000 Print At 1,1, "YON (1) ": Print At 2,1, "HIZ (2) " Print At 3,1, "CALISTIR ": Print At 4,1, "---SECiM YAPINIZ----" MENU_KONTROL: If BUTON1=0 Then GoTo YON_BELIRLE If BUTON2=0 Then GoTo HIZ_BELIRLE If GERI_CALISTIR = 0 Then GoTo MOTOR_CALISTIR GoTo MENU_KONTROL YON_BELIRLE: Print At 1,1, "SAG (1) ": Print At 2,1, "SOL (2) " If BUTON1 = 0 Then YON = 1 If BUTON2 = 0 Then YON = 0 If GERI_CALISTIR = 0 Then GoTo BASLA If YON = 1 Then Print At 3,1, "YON SECiMi: SAG " If YON = 0 Then Print At 3,1, "YON SECiMi: SOL " Print At 4,1, " GERi " GoTo YON_BELIRLE HIZ_BELIRLE: Print At 1,1, "ARTIR (1) ": Print At 2,1, "AZALT (2) " If BUTON1 = 0 Then HIZ = HIZ + 1 : Print At 3,1, " HIZ : ",Dec HIZ," MS/ADIM" If BUTON2 = 0 Then HIZ = HIZ - 1 : Print At 3,1, " HIZ : ",Dec HIZ," MS/ADIM" DelayMS 250 If GERI_CALISTIR = 0 Then GoTo BASLA Print At 4,1, "GERi " GoTo HIZ_BELIRLE MOTOR_CALISTIR: If GERI_CALISTIR = 1 Then GoTo buton_cekildi GoTo MOTOR_CALISTIR buton_cekildi: Print At 2,1, "HIZ : ",Dec HIZ," MS/ADIM" Print At 3,1, " MOTOR CALISIYOR... " Print At 4,1, " GERI " If YON=1 Then Print At 1,1, "YON : SAG ": GoTo SAGA_DON If YON=0 Then Print At 1,1, "YON : SOL ": GoTo SOLA_DON SAGA_DON: PORTD = %0001 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA PORTD = %0010 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA PORTD = %0100 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA PORTD = %1000 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA GoTo SAGA_DON: SOLA_DON: PORTD = %1000 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA PORTD = %0100 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA PORTD = %0010 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA PORTD = %0001 : DelayMS HIZ : If GERI_CALISTIR = 0 Then GoTo BASLA GoTo SOLA_DON: End HEX Uygulamanın HEX Kodu ve Simulasyon için link :
30 Akış Şeması BAŞLA Kristal ve Port Tanımlamaları LCD ve Değişken Tanımlamaları LCD TEMİZLE MENÜ Göster YÖN HIZ ÇALIŞTIR? Evet Hayır YÖN HIZ ÇALIŞTIR (SAĞ-SOL)? (ARTIR-AZALT)? ANA MENÜ: Y O N ( 1 ) H I Z ( 2 ) G E R İ / S E C İ M C A L I S T I R Y A P I N I Z Ana menüde Yön, Hız ve Geri / Çalıştır seçenekleri bulunmaktadır.motorun dönüş yönünü ayarlamak için 1, hızını ayarlamak için ise 2 nolu buton kullanılmaktadır. Enerji verildiğinde başlangıç ayarları YÖN : SAĞ ve HIZ : 100mS / Adım dır. Dilerseniz bu değerleri uygulama programında değişiklik yaparak ayarlayabilirsiniz. YÖN MENÜSÜ: S A G ( 1 ) S O L ( 2 ) Y O N S E C i M i : S G E R i A G 1 2 Hayır Hayır GERİ? GERİ? Evet Evet HIZ MENÜSÜ: Hayır GERİ ( DURDUR )? Evet DURDUR BİTİR Ana menü ekranında, 1 nolu butonuna bastığınızda uygulama YÖN menüsüne dallanacaktır. Bu menüde, kullanıcı motorun dönme yönünü belirlemektedir. İlk ayar olarak SAĞ yön seçilmiştir. Motorun dönme yönünü değiştirmek için menüde gösterilen seçeneklerden birisini seçtiğinizde yön seçimi alanında değişiklik güncellenecektir. Yön belirleme işlemini yaptıktan sonra GERİ butonuna basarak ana menüye dönüş yapılır. 3 4 MOTOR ÇALIŞMA EKRANI: A R T I R ( 1 ) A Z A L T G E R i ( 2 ) H I Z : M S / A D I M Y O N : S A G H I Z : M S / A D I M M O T O R C A L I S I Y O R G E R i Ana menü ekranında, 2 nolu butonuna bastığınızda uygulama HIZ menüsüne dallanacaktır. Bu menüde step motorunuzun iki adımı arasındaki süreyi belirleyebilirsiniz. Buda motorunuzun dönüş hızını değiştirecektir. İlk değer 100mS/Adım olarak tanımlanmıştır. Ayarlamanız bittikten sonra GERİ butonu ile ana menüye dönebilirsiniz. Ana menü ekranında, GERİ/ÇALIŞTIR butonuna bastığınızda program motor çalıştır alt programına dallanır ve daha önce ayarlamış olduğunuz yön ve hız bilgilerine göre motor dönmeye başlar. Motoru durdurmak için GERİ butonuna basmanız yeterlidir.
31


32 Proje Geliştirme Kitleri PIC Eğitimleri Komponent Proje Tasarım Facebook sayfamızı beğenin, çekilişimize katılın Seri USB Dönüştürücü kazanın... Ücretsiz KARGO ile... twitter.com/mekatroniklab facebook.com/mekatroniklab
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
MEKATRONİK. /mekatronikmuhendisligi. /mekatronikfrm
 MEKATRONİK /mekatronikmuhendisligi /mekatronikfrm Dergimizin bu sayısında, mekatronik bölümü alanında okuyan veya bu alana ilgi duyanların ufkunu açmak ve ne tür projeler geliştirebileceklerini göstermek
MEKATRONİK /mekatronikmuhendisligi /mekatronikfrm Dergimizin bu sayısında, mekatronik bölümü alanında okuyan veya bu alana ilgi duyanların ufkunu açmak ve ne tür projeler geliştirebileceklerini göstermek
Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
EEProm 24C08 UYGULAMA AMAÇ 24C08 MCU_VCC. e r : d e G. Sayfa - 1
 V0 DT2 PIC16F877 1KΩ 1KΩ Prom UYGULAMA AMAÇ prom kalıcı hafıza entegresine, PIC16F77 mikrodenetleyicisinin PD0 ve PD1 portları üzerinden bilgi kayıt edip, kayıt edilen bilgiyi Prom dan okuyarak LCD ekranda
V0 DT2 PIC16F877 1KΩ 1KΩ Prom UYGULAMA AMAÇ prom kalıcı hafıza entegresine, PIC16F77 mikrodenetleyicisinin PD0 ve PD1 portları üzerinden bilgi kayıt edip, kayıt edilen bilgiyi Prom dan okuyarak LCD ekranda
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
RPMNET WOLVOX REPORTER
 RPMNET WOLVOX REPORTER TANITIM : EFAR YAZILIM LTD.STI Tarafından Geliştirilen EFAR Wolvox Reporter AKINSOFT Wolvox Kullanıcılarının Android İşletim Sistemi Yüklü Cep Telefonlarından Online Olarak Kullandıkları
RPMNET WOLVOX REPORTER TANITIM : EFAR YAZILIM LTD.STI Tarafından Geliştirilen EFAR Wolvox Reporter AKINSOFT Wolvox Kullanıcılarının Android İşletim Sistemi Yüklü Cep Telefonlarından Online Olarak Kullandıkları
void setup() fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.
 fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.") ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
BESLEME KARTI RF ALICI KARTI
 BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
Melih Hilmi ULUDAĞ. Yazılım Mühendisi Mekatronik Mühendisi. a aittir.
 Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
e-imzatr Kurulum Klavuzu
 e-imzatr Kurulum Klavuzu Sürüm 0.0.1 1 İçindekiler İşletim Sistemi Sistem Türü Öğrenme Java yükleme Akis Kurulum Kart Okuyucu Sürücü Kurulum Kullanıcı Doğrulama 2 İşletim Sistemi Sistem Türü Öğrenme Bu
e-imzatr Kurulum Klavuzu Sürüm 0.0.1 1 İçindekiler İşletim Sistemi Sistem Türü Öğrenme Java yükleme Akis Kurulum Kart Okuyucu Sürücü Kurulum Kullanıcı Doğrulama 2 İşletim Sistemi Sistem Türü Öğrenme Bu
PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ
 PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ PIC16F84 UYGULAMA-1 İŞLEM BASAMAKLARI 1. PIC16F84 te A portunun ilk bitine (RA0) bağlı butona basıldığında,
PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ PIC16F84 UYGULAMA-1 İŞLEM BASAMAKLARI 1. PIC16F84 te A portunun ilk bitine (RA0) bağlı butona basıldığında,
Temel Mantık Kapıları
 Temel Mantık Kapıları Tüm okurlara mutlu ve sağlıklı bir yeni yıl diliyorum. Bu ay, bu güne kadar oynadığımız lojik değerleri, mantık kapıları ile kontrol etmeyi öğreneceğiz. Konuya girmeden önce, henüz
Temel Mantık Kapıları Tüm okurlara mutlu ve sağlıklı bir yeni yıl diliyorum. Bu ay, bu güne kadar oynadığımız lojik değerleri, mantık kapıları ile kontrol etmeyi öğreneceğiz. Konuya girmeden önce, henüz
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DOKUMANLAR
 DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI
 DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
DY-45 OSĐLOSKOP KĐTĐ. Kullanma Kılavuzu
 DY-45 OSĐLOSKOP KĐTĐ Kullanma Kılavuzu 01 Kasım 2010 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir yazılım
DY-45 OSĐLOSKOP KĐTĐ Kullanma Kılavuzu 01 Kasım 2010 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir yazılım
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek
 Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0
 SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0 EKİM, 2010 KONTAL ELEKTRONİK :: SEESAW BARİYER KONTROL KARTI KULLANIM KİTABI V2.0 0 SEESAW 24V DC BARİYER KONTROL KARTI KARTI VE KULLANIMI Seesaw
SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0 EKİM, 2010 KONTAL ELEKTRONİK :: SEESAW BARİYER KONTROL KARTI KULLANIM KİTABI V2.0 0 SEESAW 24V DC BARİYER KONTROL KARTI KARTI VE KULLANIMI Seesaw
HSancak Nesne Tabanlı Programlama I Ders Notları
 Konsol Uygulaması Oluşturma Konsol uygulaması oluşturmak için program açıldıktan sonra Create: Project ya da New Project seçeneği tıklanabilir. New Project penceresini açmak için farklı yollar da vardır.
Konsol Uygulaması Oluşturma Konsol uygulaması oluşturmak için program açıldıktan sonra Create: Project ya da New Project seçeneği tıklanabilir. New Project penceresini açmak için farklı yollar da vardır.
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
DY-45 OSİLOSKOP V2.0 KİTİ
 DY-45 OSİLOSKOP V2.0 KİTİ Kullanma Kılavuzu 12 Ocak 2012 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir
DY-45 OSİLOSKOP V2.0 KİTİ Kullanma Kılavuzu 12 Ocak 2012 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir
Bu dersimizde pic pinlerinin nasıl input yani giriş olarak ayarlandığını ve bu işlemin nerelerde kullanıldığını öğreneceğiz.
 Ders-2: ---------- Bu dersimizde pic pinlerinin nasıl input yani giriş olarak ayarlandığını ve bu işlemin nerelerde kullanıldığını öğreneceğiz. Hazırlanan programlarda pic in zaman zaman dış ortamdan bilgi
Ders-2: ---------- Bu dersimizde pic pinlerinin nasıl input yani giriş olarak ayarlandığını ve bu işlemin nerelerde kullanıldığını öğreneceğiz. Hazırlanan programlarda pic in zaman zaman dış ortamdan bilgi
TL-WPS510U PRINT SERVER KURULUM DÖKÜMANI
 TL-WPS510U PRINT SERVER KURULUM DÖKÜMANI 1 Başlarken Satın almış olduğunuz TL-WPS510U nun kullanım diagramı aşağıdaki gibidir. Cihazınızı bir ağ yazıcısı değilse veya kablolu ağ yazıcınızı kablosuz olarak
TL-WPS510U PRINT SERVER KURULUM DÖKÜMANI 1 Başlarken Satın almış olduğunuz TL-WPS510U nun kullanım diagramı aşağıdaki gibidir. Cihazınızı bir ağ yazıcısı değilse veya kablolu ağ yazıcınızı kablosuz olarak
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
KONTROL VE OTOMASYON KULÜBÜ
 KONTROL VE OTOMASYON KULÜBÜ C DİLİ İLE MİKROKONTROLÖR PROGRAMLAMA EĞİTİMİ Serhat Büyükçolak Ahmet Sakallı 2009-2010 Güz Dönemi Eğitimleri Mikrokontrolör Gömülü sistemlerin bir alt dalı olan mikrokontrolör
KONTROL VE OTOMASYON KULÜBÜ C DİLİ İLE MİKROKONTROLÖR PROGRAMLAMA EĞİTİMİ Serhat Büyükçolak Ahmet Sakallı 2009-2010 Güz Dönemi Eğitimleri Mikrokontrolör Gömülü sistemlerin bir alt dalı olan mikrokontrolör
AKINSOFT. Eofis NetworkAdmin. AKINSOFT EOfis NetworkAdmin Kurulumu Bilgi Notu. Doküman Versiyon : 1.01.01 Tarih : 10.01.2008. Copyright 2008 AKINSOFT
 AKINSOFT EOfis NetworkAdmin Kurulumu Bilgi Notu Doküman Versiyon : 1.01.01 Tarih : 10.01.2008 1 - Çalışma Şekli Hakkında Kısa Bilgi modülü kısaca aşağıdaki işlemleri yapar. Bu özelliklerin çalışabilmesi
AKINSOFT EOfis NetworkAdmin Kurulumu Bilgi Notu Doküman Versiyon : 1.01.01 Tarih : 10.01.2008 1 - Çalışma Şekli Hakkında Kısa Bilgi modülü kısaca aşağıdaki işlemleri yapar. Bu özelliklerin çalışabilmesi
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
D-Link DSL-6740U KOLAY KURULUM KILAVUZU. TEKN K SERV S ve DESTEK. Kablosuz N300 ADSL/ADSL2+ VDSL/VDSL2 Router (D-Smart İnternet Kullanıcıları için)
") D-Link DSL-6740U Kablosuz N300 ADSL/ADSL2+ VDSL/VDSL2 Router (D-Smart İnternet Kullanıcıları için) KOLAY KURULUM KILAVUZU TEKN K SERV S ve DESTEK 1 PAKET İÇERİĞİ * DSL-6740NRU ADSL/ADSL2+ VDSL/VDSL2 Router
D-Link DSL-6740U Kablosuz N300 ADSL/ADSL2+ VDSL/VDSL2 Router (D-Smart İnternet Kullanıcıları için) KOLAY KURULUM KILAVUZU TEKN K SERV S ve DESTEK 1 PAKET İÇERİĞİ * DSL-6740NRU ADSL/ADSL2+ VDSL/VDSL2 Router
SERNET ET232CAS x2 RS232 Seri Kanal Sunucu KULLANICI KILAVUZU. Telif Hakkı Uyarısı. >>> Otomasyon Ürünleri www.argenom.com
 SERNET ET232CAS x2 RS232 Seri Kanal Sunucu KULLANICI KILAVUZU Telif Hakkı Uyarısı Bu doküman Argenom Elektronik tarafından hazırlanmıştır. Tüm hakları saklıdır. SERNET tescilli bir Argenom Elektronik markasıdır.
SERNET ET232CAS x2 RS232 Seri Kanal Sunucu KULLANICI KILAVUZU Telif Hakkı Uyarısı Bu doküman Argenom Elektronik tarafından hazırlanmıştır. Tüm hakları saklıdır. SERNET tescilli bir Argenom Elektronik markasıdır.
SERNET ET232CAS x2 RS232 Seri Kanal Sunucu KULLANICI KILAVUZU. Telif Hakkı Uyarısı. >>> Otomasyon Ürünleri www.argenom.com
 SERNET ET232CAS x2 RS232 Seri Kanal Sunucu KULLANICI KILAVUZU Telif Hakkı Uyarısı Bu doküman Argenom Elektronik tarafından hazırlanmıştır. Tüm hakları saklıdır. SERNET tescilli bir Argenom Elektronik markasıdır.
SERNET ET232CAS x2 RS232 Seri Kanal Sunucu KULLANICI KILAVUZU Telif Hakkı Uyarısı Bu doküman Argenom Elektronik tarafından hazırlanmıştır. Tüm hakları saklıdır. SERNET tescilli bir Argenom Elektronik markasıdır.
SERNET ET485CAS x2 RS485/RS422 Seri Kanal Sunucu KULLANICI KILAVUZU. Telif Hakkı Uyarısı. >>> Otomasyon Ürünleri
 SERNET ET485CAS x2 RS485/RS422 Seri Kanal Sunucu KULLANICI KILAVUZU Telif Hakkı Uyarısı Bu doküman Argenom Elektronik tarafından hazırlanmıştır. Tüm hakları saklıdır. SERNET tescilli bir Argenom Elektronik
SERNET ET485CAS x2 RS485/RS422 Seri Kanal Sunucu KULLANICI KILAVUZU Telif Hakkı Uyarısı Bu doküman Argenom Elektronik tarafından hazırlanmıştır. Tüm hakları saklıdır. SERNET tescilli bir Argenom Elektronik
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
WAMP SERVER KURULUMU
 WAMP SERVER KURULUMU Bilgisayarınızda; PHP web programlama dilini kullanarak web sayfası hazırlayacaksanız ya da PHP web programlama dili kullanılarak hazırlanmış Joomla, Wordpress, Drupal vb.. içerik
WAMP SERVER KURULUMU Bilgisayarınızda; PHP web programlama dilini kullanarak web sayfası hazırlayacaksanız ya da PHP web programlama dili kullanılarak hazırlanmış Joomla, Wordpress, Drupal vb.. içerik
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
Paralel ve Seri İletişim. Asenkron/Senkron İletişim. Şekil 2: İletişim Modları
 Paralel ve Seri İletişim Şekil1a: Paralel İletişim Şekil1b. Seri iletişim Şekil 2: İletişim Modları Asenkron/Senkron İletişim PROTEUS/ISIS SANAL SERİ PORT ile C# USART HABERLEŞMESİ Seri iletişimde, saniyedeki
Paralel ve Seri İletişim Şekil1a: Paralel İletişim Şekil1b. Seri iletişim Şekil 2: İletişim Modları Asenkron/Senkron İletişim PROTEUS/ISIS SANAL SERİ PORT ile C# USART HABERLEŞMESİ Seri iletişimde, saniyedeki
INTERNET BAĞLANTISININ KURULMASI İÇİN GEREKLİ YÖNLENDİRİCİ AYARLARI
 INTERNET BAĞLANTISININ KURULMASI İÇİN GEREKLİ YÖNLENDİRİCİ AYARLARI Not: Bu klavuza geçmeden önce, ürününüzün paketinden çıkan Hızlı Kullanım Klavuzu nda açıklanan adımları gerçekleştiriniz. Internet Bağlantısının
INTERNET BAĞLANTISININ KURULMASI İÇİN GEREKLİ YÖNLENDİRİCİ AYARLARI Not: Bu klavuza geçmeden önce, ürününüzün paketinden çıkan Hızlı Kullanım Klavuzu nda açıklanan adımları gerçekleştiriniz. Internet Bağlantısının
2-Hafta Temel İşlemler
 2-Hafta Temel İşlemler * Html Komutlarının Yapısı * Açıklamalar * Htm Sayfasının Oluşturulması * Temel Html Komutları * Html Sayfalarının Düzenlenmesi * Html Sayfalarının İncelenmesi Html Komutlarının
2-Hafta Temel İşlemler * Html Komutlarının Yapısı * Açıklamalar * Htm Sayfasının Oluşturulması * Temel Html Komutları * Html Sayfalarının Düzenlenmesi * Html Sayfalarının İncelenmesi Html Komutlarının
Grove Parmak İzi Okuyucu Sensör ile Arduino Uno
 Grove Parmak İzi Okuyucu Sensör ile Arduino Uno Ürün Linki : http://www.robotistan.com/parmak-izi-okuyucu-sensor-grove-fingerprint- Sensor,PR-1746.html Parmak izi okuyucu modülü farklı programlar aracılığı
Grove Parmak İzi Okuyucu Sensör ile Arduino Uno Ürün Linki : http://www.robotistan.com/parmak-izi-okuyucu-sensor-grove-fingerprint- Sensor,PR-1746.html Parmak izi okuyucu modülü farklı programlar aracılığı
Horoz Programlanabilir Zaman Rölesi
 Horoz lanabilir Zaman Rölesi 1 Giriş: Horoz programlanabilir zaman rölesi android işletim sistemine sahip mobil cihazlar ile bluetooth üzerinden programlanabilen bir zaman rölesidir. Röle üzerinde 1 adet
Horoz lanabilir Zaman Rölesi 1 Giriş: Horoz programlanabilir zaman rölesi android işletim sistemine sahip mobil cihazlar ile bluetooth üzerinden programlanabilen bir zaman rölesidir. Röle üzerinde 1 adet
SAĞLIK TAKİP OTOMASYONU
 SAĞLIK TAKİP OTOMASYONU ----------------------------------------------------------------------------------------------------------------------------------------------------------- - Sağlık ve yardım Takip
SAĞLIK TAKİP OTOMASYONU ----------------------------------------------------------------------------------------------------------------------------------------------------------- - Sağlık ve yardım Takip
TecCom TecLocal Programı Kurulum ve Yapılandırma Rehberi
 TecCom TecLocal Programı Kurulum ve Yapılandırma Rehberi Giriş: TecLocal programı TecCom elektronik ticaret platformu üzerinden sisteme kayıtlı tedarikçi/distribütör firmalara bağlanmayı sağlayan ücretsiz
TecCom TecLocal Programı Kurulum ve Yapılandırma Rehberi Giriş: TecLocal programı TecCom elektronik ticaret platformu üzerinden sisteme kayıtlı tedarikçi/distribütör firmalara bağlanmayı sağlayan ücretsiz
BQ351 Modbus Röle Kontrol Ünitesi. Kullanım Kılavuzu. Doküman Versiyon: BQTEK
 Modbus Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.0 08.12.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı
Modbus Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.0 08.12.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı
T.C. KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
 T.C. KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ Mikroişlemci Uygulamaları Ders Projesi Beaglebone Black ile Webcam Streaming ve Servo Kontrolü Melih YILDIRIM 100208006
T.C. KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ Mikroişlemci Uygulamaları Ders Projesi Beaglebone Black ile Webcam Streaming ve Servo Kontrolü Melih YILDIRIM 100208006
NİTELİKLİ ELEKTRONİK SERTİFİKA KURULUM AŞAMALARI
 NİTELİKLİ ELEKTRONİK SERTİFİKA KURULUM AŞAMALARI Kurulum Aşamaları: 1. Java Kurulumu 2. E-imza Sürücülerinin İndirilmesi 3. Kart Okuyucu Kurulumu 4. Akıllı Kart Kurulumu 5. Sertifikayı Kullanıma Açma Bilgisayarların
NİTELİKLİ ELEKTRONİK SERTİFİKA KURULUM AŞAMALARI Kurulum Aşamaları: 1. Java Kurulumu 2. E-imza Sürücülerinin İndirilmesi 3. Kart Okuyucu Kurulumu 4. Akıllı Kart Kurulumu 5. Sertifikayı Kullanıma Açma Bilgisayarların
Detaylı bilgi için www.ekont.com veya http://www.ekont.com/index.php?id=119 adreslerine göz atabilirsiniz. -1-
 -1- -2- Temel Fonksiyonlar-Özellikler 1. Ücretsiz çağrı atarak kapı ve bariyer kumanda edebilme (1 adet kuru kontak çıkış) 2. Tüm programlama işlemlerinin SMS ile yapılabilmesi ve SMS ile geri bildirim
-1- -2- Temel Fonksiyonlar-Özellikler 1. Ücretsiz çağrı atarak kapı ve bariyer kumanda edebilme (1 adet kuru kontak çıkış) 2. Tüm programlama işlemlerinin SMS ile yapılabilmesi ve SMS ile geri bildirim
T.C. KAHRAMANMARAŞ VALİLİĞİİLAFET VE ACİL DURUM MÜDÜRLÜĞÜ SAĞLIK TAKİPOTOMASYONU
 T.C. KAHRAMANMARAŞ VALİLİĞİİLAFET VE ACİL DURUM MÜDÜRLÜĞÜ SAĞLIK TAKİPOTOMASYONU -----------------------------------------------------------------------------------------------------------------------------------------------------------
T.C. KAHRAMANMARAŞ VALİLİĞİİLAFET VE ACİL DURUM MÜDÜRLÜĞÜ SAĞLIK TAKİPOTOMASYONU -----------------------------------------------------------------------------------------------------------------------------------------------------------
T.C. KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
 T.C. KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ Mikroişlemci Uygulamaları Ders Projesi Beaglebone Black ile Android ve NFC Üzerinden Kapı Kontrolü Gökhan TARIM 100208090
T.C. KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ Mikroişlemci Uygulamaları Ders Projesi Beaglebone Black ile Android ve NFC Üzerinden Kapı Kontrolü Gökhan TARIM 100208090
EasyPic 6 Deney Seti Tanıtımı
 EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
NİTELİKLİ ELEKTRONİK SERTİFİKA KURULUM AŞAMALARI
 NİTELİKLİ ELEKTRONİK SERTİFİKA KURULUM AŞAMALARI Kurulum Aşamaları: 1. Java Kurulumu 2. E-imza Sürücülerinin İndirilmesi 3. Kart Okuyucu Kurulumu 4. Akıllı Kart Kurulumu 5. Sertifikayı Kullanıma Açma Bilgisayarların
NİTELİKLİ ELEKTRONİK SERTİFİKA KURULUM AŞAMALARI Kurulum Aşamaları: 1. Java Kurulumu 2. E-imza Sürücülerinin İndirilmesi 3. Kart Okuyucu Kurulumu 4. Akıllı Kart Kurulumu 5. Sertifikayı Kullanıma Açma Bilgisayarların
BQ Modbus Analog Giriş Kartı 6 Kanal PT100 - PT1000. Kullanım Kılavuzu. Doküman Versiyon: BQTEK
 Modbus Analog Giriş Kartı 6 Kanal PT100 - PT1000 Kullanım Kılavuzu Doküman Versiyon: 1.0 22.04.2016 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 3 1. Genel Görünüm...
Modbus Analog Giriş Kartı 6 Kanal PT100 - PT1000 Kullanım Kılavuzu Doküman Versiyon: 1.0 22.04.2016 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 3 1. Genel Görünüm...
OTOMATİK KONTROL 18.10.2015
 18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı
 Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
WiFi Relay Sayfa 1 / 11. WiFi Relay. Teknik Döküman
 WiFi Relay Sayfa 1 / 11 WiFi Relay Teknik Döküman WiFi Relay Sayfa 2 / 11 1. ÖZELLĐKLER 100.0mm x 80.0mm devre boyutları 12/24 VDC giriş gerilimi Giriş ve çalışma gerilimini gösteren LED ler 4 adet, 12/24V,
WiFi Relay Sayfa 1 / 11 WiFi Relay Teknik Döküman WiFi Relay Sayfa 2 / 11 1. ÖZELLĐKLER 100.0mm x 80.0mm devre boyutları 12/24 VDC giriş gerilimi Giriş ve çalışma gerilimini gösteren LED ler 4 adet, 12/24V,
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ
 5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
Smartnet PRO-W Kullanım Kılavuzu
 Sayfa 1 / 22 Kutu Đçeriği 1-) Smartnet PRO-W Kablosuz Adsl2+ 1Port Modem 2-) Güç adaptörü 3-) Sesli görüntülü interaktif kurulum CD si 4-) Türkçe Kulanım kitapçığı ve Garanti Belgesi 5-) Ayırıcı Splitter.
Sayfa 1 / 22 Kutu Đçeriği 1-) Smartnet PRO-W Kablosuz Adsl2+ 1Port Modem 2-) Güç adaptörü 3-) Sesli görüntülü interaktif kurulum CD si 4-) Türkçe Kulanım kitapçığı ve Garanti Belgesi 5-) Ayırıcı Splitter.
Adım Adım Windows 2000 Server Kurulumu 11 Cuma, 08 Eylül 2006 14:32 - Son Güncelleme Cumartesi, 12 Eylül 2009 03:45
 Nasıl bayaa yol kat ettik değil mi? Aslında bu noktada sistemimiz ciddi ciddi çalışmaya başladı. Bir süre sonra bir de baktık ki, kullanıcılar masaüstüne bazı "uygunsuz" duvar kağıtları koymaya başlamışlar.
Nasıl bayaa yol kat ettik değil mi? Aslında bu noktada sistemimiz ciddi ciddi çalışmaya başladı. Bir süre sonra bir de baktık ki, kullanıcılar masaüstüne bazı "uygunsuz" duvar kağıtları koymaya başlamışlar.
Ecat 8. Hakbim Bilgi İşlem A.Ş. Versiyon
 Ecat 8 Hakbim Bilgi İşlem A.Ş. Versiyon 2015 01.01 1 Ecat8 Nedir? Firmaların elektronik yedek parça kataloğu ihtiyacını karşılamak için Hakbim Bilgi İşlem tarafından geliştirilmiş ve geliştirilmeye devam
Ecat 8 Hakbim Bilgi İşlem A.Ş. Versiyon 2015 01.01 1 Ecat8 Nedir? Firmaların elektronik yedek parça kataloğu ihtiyacını karşılamak için Hakbim Bilgi İşlem tarafından geliştirilmiş ve geliştirilmeye devam
Hazırlayan: Tugay ARSLAN
 Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI
 PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
EAGLE KÜTÜPHANE OLUŞTURMA
 1 EAGLE mühendislik EAGLE KÜTÜPHANE OLUŞTURMA Merhaba Arkadaşlar, sizlerle bu yazımda bir PCB-Dizayn programı olan EAGLE da sıfırdan kütüphane oluşturmayı anlatmaya çalışacağım. Eagle bilindiği üzere iki
1 EAGLE mühendislik EAGLE KÜTÜPHANE OLUŞTURMA Merhaba Arkadaşlar, sizlerle bu yazımda bir PCB-Dizayn programı olan EAGLE da sıfırdan kütüphane oluşturmayı anlatmaya çalışacağım. Eagle bilindiği üzere iki
Samsun Çocuk Hizmetleri İ l Koordinasyon Sekretarya Birimi
 Samsun Çocuk Hizmetleri İ l Koordinasyon Sekretarya Birimi Veri Giriş Sistemi Klavuzu Amaç Veri Giriş Sistemi, koruyucu ve destekleyici tedbir kararlarının takibinde ve uygulamasında ilgili kurumları daha
Samsun Çocuk Hizmetleri İ l Koordinasyon Sekretarya Birimi Veri Giriş Sistemi Klavuzu Amaç Veri Giriş Sistemi, koruyucu ve destekleyici tedbir kararlarının takibinde ve uygulamasında ilgili kurumları daha
İ İŞİ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ
 İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
 https://www.facebook.com/groups/alisrobotics/ https://www.instagram.com/alikesfet/ Bline Kutu İçeriği 2x Redüktörlü DC Motor 2x Tekerlek 1x Akıllı Araç Şasesi 1x Arduino Uno 1x USB Kablosu 1x Alis Robotics
https://www.facebook.com/groups/alisrobotics/ https://www.instagram.com/alikesfet/ Bline Kutu İçeriği 2x Redüktörlü DC Motor 2x Tekerlek 1x Akıllı Araç Şasesi 1x Arduino Uno 1x USB Kablosu 1x Alis Robotics
Kurulum; Ana Bilgisayar ve Tahtalara ayrı ayrı yapılmaktadır. KURULUM ŞEMASI x.x x.x x.x x.
 KURULUM ŞEMASI 192.168.x.x 192.168.x.x 192.168.x.x 192.168.x.x ANA BİLGİSAYAR Kurulum; Ana Bilgisayar ve Tahtalara ayrı ayrı yapılmaktadır. KURULUM SİHİRBAZI adresine girerek aktahta_kur.exe dosyasını
KURULUM ŞEMASI 192.168.x.x 192.168.x.x 192.168.x.x 192.168.x.x ANA BİLGİSAYAR Kurulum; Ana Bilgisayar ve Tahtalara ayrı ayrı yapılmaktadır. KURULUM SİHİRBAZI adresine girerek aktahta_kur.exe dosyasını
BLGM423 Gömülü Sistem Tasarımı
 1 BLGM423 Gömülü Sistem Tasarımı İkinci Çalışma Sayısal giriş ucunun çeşitli konum ve hareketlerini algılama Bu çalışmada tipik bir anahtara bağlanmış olarak kullanılan sayısal giriş ucundaki konum ve
1 BLGM423 Gömülü Sistem Tasarımı İkinci Çalışma Sayısal giriş ucunun çeşitli konum ve hareketlerini algılama Bu çalışmada tipik bir anahtara bağlanmış olarak kullanılan sayısal giriş ucundaki konum ve
e-imzatr Kurulum Klavuzu
 e-imzatr Kurulum Klavuzu Sürüm 0.0.1 İçindekiler İşletim Sistemi Sistem Türü Öğrenme Java yükleme Akis Kurulum Kullanıcı Doğrulama İşletim Sistemi Sistem Türü Öğrenme Bu başlıkta bilgisayarımızın mevcut
e-imzatr Kurulum Klavuzu Sürüm 0.0.1 İçindekiler İşletim Sistemi Sistem Türü Öğrenme Java yükleme Akis Kurulum Kullanıcı Doğrulama İşletim Sistemi Sistem Türü Öğrenme Bu başlıkta bilgisayarımızın mevcut
IR Modülü. Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm
 ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
ART S603W Standalone Kart Okuyucu
 ART S603W Standalone Kart Okuyucu ART S603W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
ART S603W Standalone Kart Okuyucu ART S603W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
Adım Motoru: açıya adım. Şekil 8.2 tekyönlü. Lab 8. Siyah (A) Mavi ( B ) Kırmızı (B)
 Mavi ( B ) Kırmızı (B)") 446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
http://www.microsoft.com/visualstudio/eng/downloads
 Visual Studio 2012'nin kurulumunu, Visual Studio'nun kullanımını ve Windows Store'da basit bir proje hazırlanmasını anlatacağım. Hepsinden önce Visual Studio ortamından biraz bahsedelim. Visual Studio
Visual Studio 2012'nin kurulumunu, Visual Studio'nun kullanımını ve Windows Store'da basit bir proje hazırlanmasını anlatacağım. Hepsinden önce Visual Studio ortamından biraz bahsedelim. Visual Studio
BÖLÜM 23 TD 200... F8 F4 SHIFT ESC ENTER M1.7 M1.6 M1.5 M1.4 M1.3 M1.2 M1.1 M1.0 F8 F7 F6 F5 F4 F3 F2 F1. Shift + F1
 BÖLÜM 23 231 -TD 200 ( OPERATÖR PANEL) KULLANIMI TD 200 operatör paneli; PLC' ye mesaj göndermek, PLC' de daha önce yüklenmiş olan mesajları almak, analog işlemli projelerde ısı, nem, gaz, ışık gibi değerleri
BÖLÜM 23 231 -TD 200 ( OPERATÖR PANEL) KULLANIMI TD 200 operatör paneli; PLC' ye mesaj göndermek, PLC' de daha önce yüklenmiş olan mesajları almak, analog işlemli projelerde ısı, nem, gaz, ışık gibi değerleri
FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU
 FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU FP52 kart okuyucusunu; Mody serisi dış kapı buton modülleri ile birlikte kullanılır. Fp52 ile iki farklı röle çıkışı vardır.500 kullanıcıya kadar tanımlanabilir.
FP52 PROXIMITY KART OKUYUCUSU KULLANIM KILAVUZU FP52 kart okuyucusunu; Mody serisi dış kapı buton modülleri ile birlikte kullanılır. Fp52 ile iki farklı röle çıkışı vardır.500 kullanıcıya kadar tanımlanabilir.
AirTies Kablosuz Erişim Noktası (Access Point) olarak kullanacağınız cihazı bilgisayarınıza bağlayarak ayarlarını yapabilirsiniz.
 olarak kullanacağınız cihazı bilgisayarınıza bağlayarak ayarlarını yapabilirsiniz.") USB Disk Paylaşımı Değerli Müşterimiz, AirTies desteklediği USB Tak&Paylaş özelliği ile hiçbir ekstra donanıma ihtiyaç duymadan yaygın olarak kullanılan standart USB disk sürücülerinizi tüm ağınıza paylaştırmanıza
USB Disk Paylaşımı Değerli Müşterimiz, AirTies desteklediği USB Tak&Paylaş özelliği ile hiçbir ekstra donanıma ihtiyaç duymadan yaygın olarak kullanılan standart USB disk sürücülerinizi tüm ağınıza paylaştırmanıza
KABLOSUZ TV AKTARMA KUTUSU
 KABLOSUZ TV AKTARMA KUTUSU Hızlı Kurulum Kılavuzu DN-70310 1. Ürün tanıtımı DIGITUS Kablosuz TV aktarma kutusunu seçtiğiniz için teşekkür ederiz. Kullanımı için lütfen kullanma kılavuzundaki talimatlara
KABLOSUZ TV AKTARMA KUTUSU Hızlı Kurulum Kılavuzu DN-70310 1. Ürün tanıtımı DIGITUS Kablosuz TV aktarma kutusunu seçtiğiniz için teşekkür ederiz. Kullanımı için lütfen kullanma kılavuzundaki talimatlara
Öğrencilerin Canlı derslere katılması, * Sisteme giriş
 Öğrencilerin Canlı derslere katılması, * Sisteme giriş Öncelikle bilgisayarlarınızda bulunan internete girmenizi sağlayacak olan tarayıcıyı açmanız gerekmektedir. Hangi tarayıcıyı kullanırsanız kullanın,
Öğrencilerin Canlı derslere katılması, * Sisteme giriş Öncelikle bilgisayarlarınızda bulunan internete girmenizi sağlayacak olan tarayıcıyı açmanız gerekmektedir. Hangi tarayıcıyı kullanırsanız kullanın,
ELEKTRONİK BELGE YÖNETİM SİSTEMİ KOORDİNATÖRLÜĞÜ (EBYS KOORDİNATÖRLÜĞÜ) ELEKTRONİK İMZA KURULUM AŞAMALARI VE EBYS PROGRAMI SİSTEM GEREKSİNİMLERİ
 ELEKTRONİK İMZA KURULUM AŞAMALARI VE EBYS PROGRAMI SİSTEM GEREKSİNİMLERİ") ELEKTRONİK BELGE YÖNETİM SİSTEMİ KOORDİNATÖRLÜĞÜ (EBYS KOORDİNATÖRLÜĞÜ) ELEKTRONİK İMZA KURULUM AŞAMALARI VE EBYS PROGRAMI SİSTEM GEREKSİNİMLERİ E-İMZA KURULUM AŞAMALARI Birimimizden almış olduğunuz e-imzanızı
ELEKTRONİK BELGE YÖNETİM SİSTEMİ KOORDİNATÖRLÜĞÜ (EBYS KOORDİNATÖRLÜĞÜ) ELEKTRONİK İMZA KURULUM AŞAMALARI VE EBYS PROGRAMI SİSTEM GEREKSİNİMLERİ E-İMZA KURULUM AŞAMALARI Birimimizden almış olduğunuz e-imzanızı
İnternet Uygulamaları. FATİH Projesi PARDUS Temel Eğitim Kursu
 İnternet Uygulamaları FATİH Projesi PARDUS Temel Eğitim Kursu İnternet Uygulamaları İnternet tarayıcı programları Günümüz bilgisayar kullanıcılarının bilgisayar başında en çok vakit harcadıkları internet
İnternet Uygulamaları FATİH Projesi PARDUS Temel Eğitim Kursu İnternet Uygulamaları İnternet tarayıcı programları Günümüz bilgisayar kullanıcılarının bilgisayar başında en çok vakit harcadıkları internet
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
FPGA İLE UYGULAMA ÖRNEKLERİ FPGA ile Seri Haberleşme (RS232) Uygulaması
 Uygulaması") FPGA ile Seri Haberleşme (RS232) Uygulaması 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda, geliştirme kartımız üzerinde bulunan giriş / çıkış pinlerini FT232RL
FPGA ile Seri Haberleşme (RS232) Uygulaması 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda, geliştirme kartımız üzerinde bulunan giriş / çıkış pinlerini FT232RL
Başlangıç Ayarları. www.trippersoft.com
 Başlangıç Ayarları www.trippersoft.com Tripper > Kullanıcı Ayarları 1 LOGO Sys de TRİPPER kullanacaklar için birer kullanıcı açıyoruz. (Bu kullanıcıların her biri için LOGO programı içinde SATIŞ ELEMANI
Başlangıç Ayarları www.trippersoft.com Tripper > Kullanıcı Ayarları 1 LOGO Sys de TRİPPER kullanacaklar için birer kullanıcı açıyoruz. (Bu kullanıcıların her biri için LOGO programı içinde SATIŞ ELEMANI
LOJİK DEVRELER-I III. HAFTA DENEY FÖYÜ
 LOJİK DEVRELER-I III. HAFTA DENEY FÖYÜ 3 Bitlik Bir Sayının mod(5)'ini Bulan Ve Sonucu Segment Display'de Gösteren Devrenin Tasarlanması Deneyin Amacı: 3 bitlik bir sayının mod(5)'e göre sonucunu bulan
LOJİK DEVRELER-I III. HAFTA DENEY FÖYÜ 3 Bitlik Bir Sayının mod(5)'ini Bulan Ve Sonucu Segment Display'de Gösteren Devrenin Tasarlanması Deneyin Amacı: 3 bitlik bir sayının mod(5)'e göre sonucunu bulan
BİLGİSAYAR BİLİMİ DERSİ (KUR-2)
") BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
INTERRA KONSIYAJ SERVER KULLANIM KLAVUZU
 INTERRA KONSIYAJ SERVER KULLANIM KLAVUZU 2015 YONNET AKILLI BİNA OTOMASYON SİSTEMLERİ 2015 P a g e 1 İçindekiler INTERRA KONSIYAJ SERVER2 KULLANICI GİRİŞİ2 1.INTERRA KONSİYAJ SERVER3 1.1ISTEKLER3 1.2 ALARM4
INTERRA KONSIYAJ SERVER KULLANIM KLAVUZU 2015 YONNET AKILLI BİNA OTOMASYON SİSTEMLERİ 2015 P a g e 1 İçindekiler INTERRA KONSIYAJ SERVER2 KULLANICI GİRİŞİ2 1.INTERRA KONSİYAJ SERVER3 1.1ISTEKLER3 1.2 ALARM4
Bilge Elektronik Ltd. Şti. Eczanem Otomasyon Sistemi. SMS Modülü
 Bilge Elektronik Ltd. Şti. Eczanem Otomasyon Sistemi SMS Modülü 1 Eczanem Otomasyon Sistemi SMS Modülü Eczanem Otomasyon Sistemi Sms Modülü, değişik gönderim seçeneklerine ile her ihtiyaca göre mesaj gönderim
Bilge Elektronik Ltd. Şti. Eczanem Otomasyon Sistemi SMS Modülü 1 Eczanem Otomasyon Sistemi SMS Modülü Eczanem Otomasyon Sistemi Sms Modülü, değişik gönderim seçeneklerine ile her ihtiyaca göre mesaj gönderim
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
Ortak Dersler Sanal Sınıf Sistemi Kullanım Kılavuzu
 Ortak Dersler Sanal Sınıf Sistemi Kullanım Kılavuzu Ortak Dersler, tüm üniversite bölümlerinde fakülte ve meslek yüksekokulu farkı gözetmeksizin, aynı olan bazı derslerin tek bir sistem üzerinden öğretimin
Ortak Dersler Sanal Sınıf Sistemi Kullanım Kılavuzu Ortak Dersler, tüm üniversite bölümlerinde fakülte ve meslek yüksekokulu farkı gözetmeksizin, aynı olan bazı derslerin tek bir sistem üzerinden öğretimin
TEKNİK ÖZELLİKLER. Giriş Beslemesi. Giriş besleme voltajı. Motor Çıkışı. Motor gerilimi. Aşırı yük ve kısa devre korumalı.
 1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
NBG416N. Kullanım Kılavuzu ve Garanti Kartı NBG416N
 NBG416N Kullanım Kılavuzu ve Garanti Kartı NBG416N Ürün Bakım ve Muhafaza Ürünü sadece orijinal adaptörü ile çalıştırınız. Ürünün kasasını hiçbir koşulda açmayınız, herhangi bir parçasını sökmeyiniz. Arıza
NBG416N Kullanım Kılavuzu ve Garanti Kartı NBG416N Ürün Bakım ve Muhafaza Ürünü sadece orijinal adaptörü ile çalıştırınız. Ürünün kasasını hiçbir koşulda açmayınız, herhangi bir parçasını sökmeyiniz. Arıza
GAZİANTEP ÜNİVERSİTESİ
 GAZİANTEP ÜNİVERSİTESİ Fizik Mühendisliği Bölümü Pic Basic Pro ile PIC Programlama Ders Notları Hazırlayan: Kamil KAYA 2012 Mikrodenetleyiciler: Mikrodenetleyicilerin tanımına girmeden önce kısaca mikroişlemcilere
GAZİANTEP ÜNİVERSİTESİ Fizik Mühendisliği Bölümü Pic Basic Pro ile PIC Programlama Ders Notları Hazırlayan: Kamil KAYA 2012 Mikrodenetleyiciler: Mikrodenetleyicilerin tanımına girmeden önce kısaca mikroişlemcilere
Sistem Nasıl Çalışıyor: Araç İzleme ve Filo Yönetim Sistemi
 arvento Araç Takip ve Filo Yönetim Sistemleri ile araçlarınızı 7 gün 24 saat on-line ve geçmişe yönelik olarak izleyebilir, hızlarını, izlemiş oldukları güzergahı, duraklama yaptıkları yerleri uzaktan
arvento Araç Takip ve Filo Yönetim Sistemleri ile araçlarınızı 7 gün 24 saat on-line ve geçmişe yönelik olarak izleyebilir, hızlarını, izlemiş oldukları güzergahı, duraklama yaptıkları yerleri uzaktan
Denetim Masası/Programlar/Windows özelliklerini Aç/Kapat
 Merhaba arkadaşlar, Bu yazımızda yerel ağda veya Ip adresimizle bir web sitesinin paylaşıma açılması, aynı ağdan veya uzaktan bir bilgisayarın web sitemize nasıl erişebileceği konuları üzerinde duracağız.
Merhaba arkadaşlar, Bu yazımızda yerel ağda veya Ip adresimizle bir web sitesinin paylaşıma açılması, aynı ağdan veya uzaktan bir bilgisayarın web sitemize nasıl erişebileceği konuları üzerinde duracağız.
Bilgisayar Mühendisliğine Giriş. Yrd.Doç.Dr.Hacer KARACAN
 Bilgisayar Mühendisliğine Giriş Yrd.Doç.Dr.Hacer KARACAN Mikroişlemci Nedir? Bir bilgisayarın en önemli parçası Mikroişlemcisidir. Hiçbir bilgisayar mikroişlemci olmadan çalışamaz. Bu nedenle Mikroişlemci
Bilgisayar Mühendisliğine Giriş Yrd.Doç.Dr.Hacer KARACAN Mikroişlemci Nedir? Bir bilgisayarın en önemli parçası Mikroişlemcisidir. Hiçbir bilgisayar mikroişlemci olmadan çalışamaz. Bu nedenle Mikroişlemci
Windows 7 Format Atma ve Kurulumu (Resimli Anlatım)
") www.anasayfa.xyz Kasım 1, 2015 Windows 7 Format Atma ve Kurulumu (Resimli Anlatım) by www.anasayfa.xyz Bu yazımda windows 7 format atma işlemini detaylı bir şekilde anlatacağım. Ben format işlemini tüm
www.anasayfa.xyz Kasım 1, 2015 Windows 7 Format Atma ve Kurulumu (Resimli Anlatım) by www.anasayfa.xyz Bu yazımda windows 7 format atma işlemini detaylı bir şekilde anlatacağım. Ben format işlemini tüm
Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r.
 Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r. Özellikleri 5 dk gibi bir sürede kurulumu yapılabilir. Açık kaynaklı bir pla orm olan Arduino temeline
Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r. Özellikleri 5 dk gibi bir sürede kurulumu yapılabilir. Açık kaynaklı bir pla orm olan Arduino temeline
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan