MIM 210 DİNAMİK DERSİ DERS NOTU
|
|
|
- Ufuk Poyraz
- 7 yıl önce
- İzleme sayısı:
Transkript
1 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği: Dinamik, Çeviri Editörü: Prof. Dr. Paşa YAYLA, Nobel Yayınları, R.C. HIBBELER, Mühendislik Mekaniği: Dinamik, Çeviri Editörü: Ayşe SOYUÇOK ve Özgün SOYUÇOK, Literatür Yayınları, Prof. Dr. Yaşar PALA, Mühendislik Mekaniği: Dinamik (Matlab Destekli), Nobel Yayınları,
, Nobel Yayınları, 2007. 1")
2 G1. Giriş Mekanik kuvvetlerin etkisi altındaki cisimlerin davranışlarını inceleyen bir bilim dalıdır. Mekaniğin tarihi binlerce yıl öncesine (Arşimet, MÖ 250) kadar dayanır. Bu alanda yapılan incelemeler insanoğluna, hem tabiat olaylarını anlama hem de daha uygun yaşam koşulları geliştirerek varlığını sürdürebilme olanağı sağlamıştır. Zaman içerisinde mekanik, gerek fizik gerekse mühendislik alanında çok sayıda dallara ayrılmıştır. Günümüzde mekanik bilimini; I. Teorik Mekanik II. Klasik Mekanik III. Uygulamalı Mekanik olmak üzere üç ana başlık altında toplamak mümkündür. Mühendislik Mekaniği ise Uygulamalı Mekaniğin bir dalı olmakla birlikte modern gelişmeler ve uygulamalar ile birlikte bu üç ana başlığın bir birleşimi olarak ortaya çıkmıştır. Tarihsel olarak Dinamiğe katkıda bulunan kişiler Galileo ( ) cisimlerin serbest düşmesini inceledi. Huygens pendulumu (sarkaç saat) buldu (1657). Newton, Principa da dinamiğin temellerini ortaya koyan hareket denklemlerini yayınladı. İlk olarak evrensel çekim gücünü doğru olarak formule etti. Newton u Euler, D lambert, Lagrange, Laplace, Poinsot, Coriolis, ve Einstein izledi. 2

3 Mühendislik Mekaniği temel olarak statik, dinamik ve şekil değiştiren cisimlerin mekaniği olmak üzere üç ana başlık altında ele alınır. Statik, duran veya sabit hızlı hareket eden cisimlerin denge durumlarını inceler ve dış çevre ile ilişkilerini kuvvet, moment vs. gibi tesirler yönünden ele alır. Statik incelemeler Newton un 1. ve 3. Kanunları üzerine kurulmuştur. Dinamik, ivmeli hareket yapan cisimlerin hareket analizi ile ilgilenir. Dinamik incelemeler ise, Newton un 2. (Temel Kanun) ve 3. Kanunları esas alınarak gerçekleştirilir. Şekil değiştiren cisimlerin mekaniği ise, dış kuvvetlere şekil değiştirerek karşılık veren cismin, içerisinde meydana gelen etkileri kesme kuvveti, moment, yer değiştirme vs. yönünden ele alır. İncelene cismin elastik, elestikplastik, plastik vs. şekil değişimi göstermesi ya da akışkan olması gibi durumlara göre alt başlıklara ayrılır. Biz bu ders kapsamında, mühendislik mekaniğinin dinamik kısmını inceleyeceğiz. Genellikle dinamik problemler ele alınırken, hareket analizini basitleştirmek amacıyla incelemeler kinematik ve kinetik olmak üzere iki grup altında yapılır. Kinematik, hareketin konum, hız, ivme gibi sadece geometrik (yada matematiksel) yönlerini inceler. Harekete sebep olan kuvvetler ile ilgilenmez. Bu yüzden kinematik tamamen matematiksel bir incelemedir. Kinetik ise hareketi, harekete neden olan kuvvetler ile birlikte el alır. İstenen bir hareketin meydana gelebilmesi için uygulanması gereken kuvvet ya da momentler ile ilgilenir. Bu ders kapsamında dinamik inceleme yapılırken, genel uygulamada da olduğu gibi, öncelikle hareketin kinematiği ele alınacak, daha sonra hareketin kinetiği faslına geçilecektir. Mühendislik Mekaniği Statik Dinamik Şekil Değiştiren Cisimlerim Mekaniği Kinematik Mukavemet Kinetik Akışkanlar Mekaniği Şekil G.1. Mühendislik mekaniği ve dinamiğin alt başlıkları 3

4 Doğada var olan cisimler en genel halde üç boyutludur. Böyle bir cisim tek-boyutlu, ikiboyutlu (düzlemsel) ve üç-boyutlu bir hareket yapabilir. Matematiksel kolaylık sağlamak amacıyla hem cismin boyutları hem de cismin hareketi ile ilgili bazı kabuller yapmak oldukça faydalıdır. Öncelikle, cismin boyutları ihmal edilerek, cisim sadece kütlesinden oluşan bir maddesel nokta (ya da parçacık) olarak göz önüne alınacak. Geçerli ilkeleri daha iyi anlayabilmek için, önce maddesel nokta dinamiği incelenecek, ardından (iki ve üç boyutlu) rijit cisim dinamiği ele alınacaktır. Buna göre bu dönem dinamik dersi aşağıda sunulan içerik dâhilinde işlenmesi planlanmıştır. Ne Zaman Maddesel Nokta Kabulü Yapılabilir? Cismin kendisini çevreleyen ortamın boyutlarına nispeten boyutlarının çok küçük olduğu ve kütle merkezine göre hareketinin ihmal edilebildiği durumlarda Maddesel Nokta kabulü genellikle yapılabilir. Örneğin, dünyanın çevresinde bir uydunun hareketi ya da atılan bir merminin hareketi halinde cisimleri Maddesel Nokta olarak kabul edebiliyoruz. Çünkü cisimlerin boyutları dünyaya göre hemen hemen hiç hükmündedir. Yine güneş etrafında dolanan dünya için, dünyanın yörüngesinin çevrelediği alan çok büyük olduğundan, incelemelerde Maddesel Nokta kabulü yapmak pekte yanlış olmaz. Her durumda incelenen cismin bir bütün olarak dışarıdan gözlenen hareketinin iç hareketinden etkilenmemesi gerekir. Dünya örneğinde, dünya içerisinde meydana gelen olaylar yörüngesini etkilemediği için Maddesel Nokta kabulü yapabiliyoruz. Ancak, mesela küçük bir kayık içerisinde nehirde hareket eden bir insan için, insanın kayık içerisindeki hareketi kayığın hareketini etkileyeceğinden, bu durumda Maddesel Nokta kabulü yapmak mümkün değildir. 4
 rijit cisim dinamiği ele alınacaktır.")
5 Maddesel Nokta Dinamiği Dinamik Ders Planı Bölüm 1 : Maddesel Nokta Kinematiği 1.1. Doğrusal Hareket 1.2. Eğrisel Hareket 1.3. Bağıl Hareket Bölüm 2 : Maddesel Nokta Kinetiği: Kuvvet ve İvme 2.1. Newton un Hareket Kanunları 2.2. Hareket Denklemleri 2.3. Maddesel Nokta Sistemlerinin Hareket Denklemleri 2.4. Hareket Denklemleri: Dik Koordinatlar 2.5. Hareket Denklemleri: Normal ve Teğetsel Koordinatlar 2.6. Hareket Denklemleri: Silindirik Koordinatlar 2.7. Maddesel Nokta Dinamiğinin Çözüm Yolu Bölüm 3 : Maddesel Nokta Kinetiği: İş ve Enerji 3.1. Bir Kuvvetin İşi 3.2. İş ve Enerji İlkesi 3.3. Maddesel Nokta Sistemleri İçin İş ve Enerji İlkesi 3.4. Güç ve Verim 3.5. Korunumlu Kuvvetler ve Potansiyel Enerji 3.6. Enerjinin Korunumu Bölüm 4 : Maddesel Nokta Kinetiği: İmpuls ve Momentum 4.1. Giriş : Lineer İmpuls ve Momentum İlkesi 4.2. Maddesel Nokta Sistemleri İçin Lineer İmpuls ve Momentum İlkesi 4.3. Maddesel Nokta Sistemleri İçin Lineer Momentumun Korunumu 4.4. Çarpışma 4.5. Açısal Momentum 4.6. Bir Kuvvetim Momenti ile Açısal Momentum Arasındaki İlşiki 4.7. Açısal İmpuls ve Momentum İlkesi 5

6 Rijit Cisim Dinamiği Bölüm 5 : Rijit Cismin Düzlemsel (2-Boyutlu) Kinematiği 5.1. Rijit Cismin Hareketi 5.2. Öteleme 5.3. Sabit Bir Eksen Etrafında Dönme 5.4. Genel Mutlak Düzlemsel Hareket 5.5. Bağıl Hareket Analizi: Hız 5.6. Sıfır Hızlı Anlık Merkez 5.7. Bağıl Hareket Analizi: İvme 5.8. Dönen Eksenlerle Bağıl Hareket Analizi Bölüm 6 : Rijit Cismin Düzlemsel (2-Boyutlu) Kinetiği: Kuvvet ve İvme 6.1. Giriş: Eylemsizlik Momenti 6.2. Düzlemsel Hareketin Kinetik Denklemleri 6.3. Hareket Denklemleri: Öteleme 6.4. Hareket Denklemleri: Sabit Bir Eksek Etrafında Dönme 6.5. Hareket Denklemleri: Genel Düzlemsel Hareket Bölüm 7 : Rijit Cismin Düzlemsel Kinetiği: İş ve Enerji 7.1. Kinetik Enerji 7.2. Bir Kuvvetin İşi 7.3. Kuvvet Çiftinin İşi 7.4. İş ve Enerji İlkesi 7.5. Enerji Korunumu Bölüm 8 : Rijit Cismin Düzlemsel Kinetiği: İmpuls ve Momentum 8.1. Lineer ve Açısal Momentum 8.2. İmpuls ve Momentum İlkesi 8.3. Momentumun Korunumu 8.4. Merkezsel Olmayan (Eğik) Çarpışma 8.5. Çarpışma Analizinde Problem ve Modern Gelişmeler 6

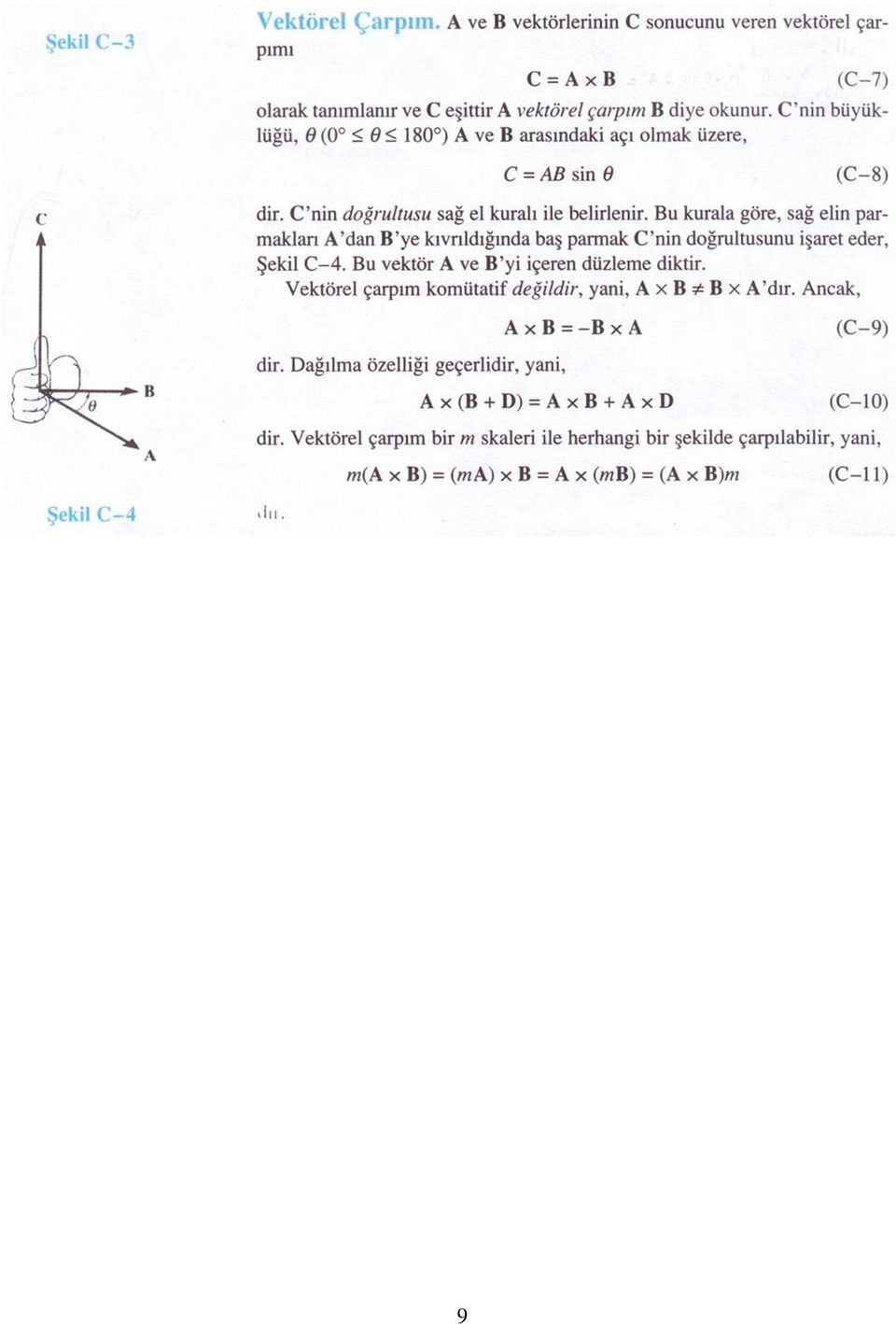
7 G2. Temel Kavramlar Uzay, cisimler tarafından işgal edilen geometrik bölgedir. Uzayda konum bir geometrik referans sistemine olan doğrusal ve açısal ölçümler yardımıyla tanımlanır. Zaman, birbirini izleyen olayların bir ölçüsüdür. Newton mekaniğinde zaman mutlak olarak kabul edilir. Kütle, ataletin veya hareketin değişimine karşı gösterilen direncin, nicel bir ölçüsüdür. Kuvvet, bir cismin diğer bir cisme vektörel etkisidir. Maddesel Nokta, boyutları izlediği yörüngenin eğrilik yarıçapının büyüklüğüne göre ihmal edilebilecek düzeyde olan, yalnızca kütlesi olduğu kabul edilen cisimlerdir. Rijit Cisim, şeklindeki değişimler boyutlarına göre ihmal edilebilen cisimlerdir. G3. Vektörel ve Skaler Büyüklükler Bilindiği gibi, Fen ve Mühendislikte kütle, zaman, sıcaklık, enerji ve daha başka bazı niceliklerin yalnız büyüklüğünü vermekle yetinebiliriz. Bunu bir örnekle açıklarsak; kütlesi 1 kg olan bir cisimden söz ettiğimizde cismin kütlesi hakkında verilmesi gereken bütün bilgileri vermiş oluruz. Bunun yanında hız ve yer değişimi gibi pek çok önemli niceliğin sadece değerini vermek yeterli değildir. Hareket halinde olan bir cismin hızının 100 m/s olduğu söylendiğinde aklımıza hemen söz konusu cismin hangi doğrultu ve yönde hareket ettiği gelir. Bu çeşit büyüklüklerin yalnız değeri değil aynı zamanda doğrultusu ve yönünün de bilinmesi gerekir. O halde yalnız sayısal değeri verilerek belirlenen niceliklere Skaler Büyüklükler, sayısal değerinin yanında doğrultu ve yönü de belirtilen niceliklere ise Vektörel Büyüklükler adı verilir. Bu ders kapsamında, skaler büyüklükler italik harfler ile, vektörel büyüklükler ise koyu (veya kalın) harfler ile gösterilecektir. 7

8 G3.1. Vektörel Analiz Vektör, iki noktayı birleştiren bir doğru parçasıdır. Vektörlerin, büyüklüğü, doğrultuları ve yönleri vardır. 8

9 9
10 10

11 11

12 G4. Newton un Kanunları 1. Kanun (Eylemsizlik Kanunu): Bir cisim, kendisine etkiyen herhangi bir dengelenmemiş kuvvet yok ise, hareketsiz ise hareketsiz kalır ya da hareketli ise doğrusal bir çizgi boyunca sabit hızla hareketine devam eder. 2. Kanun (Temel Kanun): Bir cismin ivmesi ona etki eden bileşke kuvvet ile orantılı ve aynı yöndedir. (G.1) 3. Kanun (Etki-Tepki Kanunu): Birbiri ile etkileşim içerisindeki cisimler arasında kuvvetler eşit, aynı doğrultuda fakat zıt yönlüdür. Etki = - Tepki G5. Newton un Evrensel Kütle Çekim Kanunu Newton üç hareket kanunu formüle ettikten kısa bir süre sonra, gök cisimlerinin hareketleriyle ilgili yaptığı çalışmalar sonucu kütlelerin birbirine uyguladığı çekim kuvvetini keşfetmiştir. Bu kanun, F : İki cismin çekim kuvveti (N) G : Evrensel gravitasyon (çekim) sabiti ( G = m 3 / kgs 2 ) m 1, m 2 : Cisimlerin kütleleri (kg) r : İki cismin merkezleri arasındaki uzaklık (m) olmak üzere, matematiksel olarak şeklinde ifade edilir. 12
: Birbiri ile etkileşim içerisindeki cisimler arasında kuvvetler eşit, aynı doğrultuda fakat zıt yönlüdür. Etki = - Tepki G5.")
 çekim kuvveti söz konusudur.")
13 Kütle çekimi, cisimlerin Dünya'nın yüzeyinde kalması, gezegenlerin yörüngelerinin olması gibi fiziksel olayların sebebidir. F 1 = F 2 Şekil G.2. Newton un evrensel kütle çekim kanunu r G6. Ağırlık Denklem G.2 ye göre, herhangi iki cisim arasında karşılıklı olarak etki eden bir (gravitasyonel) çekim kuvveti söz konusudur. Dünyanın yüzeyi üzerinde yer alan veya yüzeyine yakın konumda bulunan bir cisim için, anlamlı bir büyüklüğe sahip tek gravitasyonel kuvvet dünya ile cisim arasında olandır. Sonuç olarak, ağırlık adını verdiğimiz bu kuvvet, mekanik incelemelerde ele alınan tek gravitasyonel kuvvettir. Kısaca ağırlık, dünyanın cisimlere uyguladığı çekim kuvvetidir. Denklem G.2 den, kütlesi m 1 = m olan bir cismin W ağırlığını, dünyanın, sabit yoğunluklu ve m 2 kütleli dönmeyen bir küre olduğunu varsayarak ve dünya merkezi ile cisim arasındaki mesafeyi r alarak, ifadesini elde ederiz. Bu ifadeyi, g = G m 2 / r 2 yeniden düzenlersek, elde ederiz. Bu ifadede yer alan g yi yer çekimi ivmesi olarak adlandırırız. Bir cismin ağırlığı, r ye bağlı olduğundan, mutlak bir büyüklük değildir yani ölçüm yapılan yere göre değişim gösterebilir. Ancak, çoğu mühendislik hesaplamaları için, standart konum olarak tanımlanan deniz seviyesi ve 45 o enlemde belirlenir. Bu durumda, g = m/s 2 değerini alır. 13

14 G7. Koordinat Sistemi Fiziğin pek çok dalı, cisimlerin uzaydaki yerleri yani konumları ile ilgilenir. Örneğin, bir cismin hareketinin matematiksel açıklaması elde etmek amacıyla bir matematiksel model (yani bir denklem) oluşturabilmek için cismin konumunu tanımlayacak bir yönteme ihtiyaç vardır. Yani, cismin uzaydaki yerinin en uygun şekilde nasıl tanımlanacağının bilinmesi gerekir. Bu tanımlama, koordinat sistemleri aracılığı ile yapılır. Bir doğru üzerinde bulunan bir nokta tek bir koordinatla; düzlemdeki bir nokta iki koordinatla; uzaydaki bir nokta ise üç koordinat ile tanımlanabilir. En genel halde, uzaydaki bir cismin, herhangi bir t anındaki konumu Kartezyen (dik) koordinatlar ile (x, y, z) Silindirik koordinatları ile (r, θ, z) Küresel koordinatları ile (R,θ.Φ) Yörüngenin teğetsel ve normal parametreleri yani teğetsel koordinatlar ile (t, n) tanımlanabilir. Cismin konumunun hangi koordinat sistemiyle tanımlanacağına karar verilirken, cismin yapmış olduğu hareketin türü oldukça önemlidir. Cismin hareketine uygun koordinat sistemi incelemeleri kolaylaştırır. Örneğin, doğrusal bir hareket yapan bir cismin konumunu Kartezyen koordinat sistemi ile tanımlamak; dairesel bir yörünge boyunca hareket eden bir cismin konumunu ise silindirik veya kutupsal koordinatlar ile tanımlamak daha uygundur. Hareketin türüne göre koordinat sistemi seçmek tecrübeye dayalıdır ve bu alanda bilgi birikiminiz ilerledikçe buna çok rahatlıkla karar vereceksiniz. Kartezyen (Dik) Koordinat Sistemi Silindirik Koordinat Sistemi 14


15 Küresel Koordinat Sistemi Şekil G.3. Koordinat sistemleri G8. Birim Sistemi ve Boyutlar Nicel büyüklükleri i anlamlandırabilmek, kıyaslayabilmek için birimleri kullanırız. Birimi verilmeksizin sunulan herhangi bir niceliğin mühendislik açısından hiçbir anlamı ve dolayısıyla da önemi yoktur. Genel olarak kullanılan iki birim sistemi mevcuttur. Bunlar, Uluslar arası Metrik Birim Sistemi (SI) ve Amerikan Birim sistemidir. Her iki birim sistemi için mekaniğin dört temel büyüklüğü, bunların birimleri ve sembolleri aşağıda özetlenmiştir: Boyut ve birim birbiri ile karıştırılmamalıdır. Örneğin, uzunluk gibi herhangi bir boyut metre, milimetre veya kilometre çeşitli birimler kullanılarak ifade edilebilir. Bu yüzden, boyut birimden farklıdır. 15

16 G9. Boyut Homojenliği Herhangi bir fiziksel olayı tanımlamak için kullanılan bir denklemin boyutları homojen olmalıdır; yani her bir terim aynı birim cinsinden ifade edilmelidir. Örneğin, s = v t + 1/2 a t 2 denklemini ele alalım; burada, SI birim sistemi cinsinden, s (m) metre, t (s) saniye, v (m/s) hız ve a (m/s 2 ) ivmedir. Belirtilen formda üç terimin her biri metre cinsinden ifade edilmektedir. Bu yüzden, bu denklem boyutsal olarak homojendir. Mekanikte ve diğer bilim dallarındaki problemler, boyutları homojen olan denklemlerin çözümünü içerdiğinden, bir denklemdeki terimlerin hepsinin birimleri aynı olmalıdır, bu durum denklemlerin kontrolü içinde kullanılabilir. i Nicel büyüklük: Ölçülebilen, sayılabilen, miktarı tespit edilebilen azlığı yada çokluğu belirlenebilen büyüklükler (kütle, uzunluk vs.). 16

17 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini tanımlayan dinamiğin koludur. Bu nedenle, kinematik genellikle hareketin geometrisi olarak ifade edilir. Tam bir kinematik bilgisi hareket ve harekete sebep olan veya eşlik eden kuvvetler arasındaki ilişkilerin incelendiği kinetik için ön şarttır. Bir maddesel nokta, en genel halde, doğrusal ya da eğrisel bir yörünge üzerinde hareket edebilir. Bu bölümde, ilk olarak, maddesel nokta hareketi kinematiğine giriş için doğrusal hareket incelenecektir. Hareketin kinematiğini, maddesel noktanın verilen herhangi bir andaki konum, hız ve ivmesinin belirlenmesi olarak tanımlayabiliriz Doğrusal Hareket Şekil 1.1 de bir doğru boyunca hareket eden bir maddesel noktanın hareketini dikkate alalım. Bu maddesel nokta herhangi bir t anında P noktasında bulunsun. O halde bu parçacığın konumu aynı doğru üzerindeki uygun sabit bir O referans noktasından ölçülen s mesafesi ile belirlenebilir. t +Δt anında parçacığın P' noktasına hareket etmekte ve konumu s +Δs olmaktadır. Δt zamanı boyunca parçacığın konumundaki değişim Δs yer değişimi olarak adlandırılır. Maddesel nokta O referans noktasının soluna yani negatif s yönünde hareket ediyor ise yer değiştirme negatif olacaktır. - s t anı t +Δt anı O P P' + s s Δs Şekil 1.1 1

18 Hız Δt süresi boyunca parçacın ortalama hızı, yer değiştirmenin zaman aralığına bölümüdür yani v ort = Δs / Δt. Δt giderek sıfıra yaklaştığında ( ), cismin ortalama hızı cismin anlık hızına yaklaşır bunu aşağıdaki gibi ifade edebiliriz: Bundan dolayı hız, yer değiştirme koordinatı s nin zamana göre değişme oranıdır (yani zamana göre türevidir). İvme Δt süresi boyunca parçacın ortalama ivmesi, hızın zaman aralığına bölümüdür yani a ort = Δv/Δt. Δt azalıp limit sıfıra yaklaşırken ( ), cismin ortalama ivmesi cismin anlık ivmesine yaklaşır bunu aşağıdaki gibi ifade edebiliriz: İvme, hızın artmasına veya azalmasına bağlı olarak pozitif veya negatif değerler alabilir. Maddesel nokta yavaşlıyor ise ivmesi negatiftir. Ancak, maddesel noktanın azalmakta olan negatif hıza sahip olması durumunda, maddesel noktanın ivmesinin pozitif olacağına dikkat ediniz. Hız ve ivme, bir sonraki konuda ele alacağımız eğrisel harekette göreceğimiz gibi, aslında vektörel büyüklüklerdir. Ancak, doğrusal harekette, hareketin doğrultusun da herhangi bir değişimi söz konusu değildir yalnızca hız ve ivmenin büyüklüğü değişir, bu yüzden vektörel gösterime ihtiyaç yoktur ve yalnızca skaler olarak işlem yapılabilir. Hareket doğrultusunda meydana gelebilecek yön değişimleri eksi ve artı işaretleri ile tanımlanır. 1.1 ve 1.2 denklemleri arasında dt yok edilerek, yer değiştirme, hız ve ivme için diferansiyel bir denklem elde edebiliriz: 2
, cismin ortalama ivmesi cismin anlık ivmesine yaklaşır bunu aşağıdaki gibi ifade edebiliriz: İvme, hızın artmasına veya azalmasına bağlı olarak pozitif veya")
19 1.1, 1.2 ve 1.3 denklemleri maddesel noktanın doğrusal hareketini temsil eden diferansiyel denklemlerdir. Hareket değişkenlerindeki sonlu değişimleri içeren doğrusal hareket problemleri bu temel diferansiyel denklemlerin integrasyonu ile çözülür. Hatırlatma: Doğrusal hareketi temsil eden diferansiyel denklemler Doğrusal hareketi temsil eden diferansiyel denklemleri daha iyi yorumlayabilmek için konum, hız, ivme ve zaman arasındaki ilişkilerin grafik olarak gösteriminin verildiği Şekil 1.2 yi incelemek yaralı olacaktır. Şekil 1.2a da bir doğrusal hareketin konum-zaman (s - t) grafiği verilmiştir. Herhangi bir t anında s - t eğrisine teğet çizerek o andaki hızı elde edebiliriz. Bu şekilde hız, eğrinin bütün noktalarında belirlenebilir ve Şekil 1.2b de gösterildiği gibi zamana göre çizilebilir. Benzer şekilde, v - t eğrisinin herhangi bir anındaki eğimi o andaki a ivmeyi verir ve buna bağlı olarak a - t eğrisi Şekil 1.2c deki gibi çizilebilir. Şekil 1.3b de dt süresince v - t eğrisi altında kalan alanın ds yer değişimine eşit olduğunu gözlemleyebiliriz (Denklem 1.1 den, ). Benzer şekilde, Şekil 1.2c den dt süresince a-t eğrisini altındaki alanın dv ye eşit olduğunu görüyoruz (Denklem 1.1 den, ). 3
 grafiği verilmiştir.")
20 Bir diğer gözlemimiz ise, Şekil 1.2d de ds yer değiştirmesi süresince a-s eğrisinin altında kalsan alanın Denklem 1.3 den v dv ye eşit olduğudur. (a) (b) (c) (d) Şekil 1.2 4

21 Doğrusal Hareket Türleri İvme a; hız v, konum s ve zaman t arasında ilişki aşağıdaki şekillerde verilmiş olabilir: Sabit ivme (a = sabit) verilebilir. İvme zamanın fonksiyonu olarak a = f (t) verilebilir. İvme hızın fonksiyonu olarak a = f (v) verilebilir. İvme konumun fonksiyonu a = f (s) verilebilir. I. Sabit ivme, a = sabit a sabit olduğunda, 1.2 ve 1.3 denklemleri doğrudan integre edilebilir 1 : Denklem 1.4 Denklem 1.1 de yerine yazılırsa: bağıntısı elde edilir. 1 0 alt indisi başlangıç büyüklüğünü ifade etmektedir. 5
22 II. Zamanın fonksiyonu olarak verilen ivme, a = f (t) İvmenin zamanın fonksiyonu olması durumunda Denklem 1.2, şeklini alır. Zamanın fonksiyonu olarak integre edilen v (t) bağıntısı Denklem 1.1 de yerine yazılırsa s konum koordinatı için, elde edilir. III. Hızın fonksiyonu olarak verilen ivme, a = f (v) İvme hızın bir fonksiyonu olarak verilmiş ise a = f (v) fonksiyonu Denklem 1.3 de yerine yazılırsa s konum koordinatı için, elde edilir. Bu denklemin, t ile belirli bir ilgisi olmadan, v cinsinden s yi verdiğine dikkat ediniz. IV. Konumun fonksiyonu olarak verilen ivme, a = f (s) Bu durumda a = f (s) fonksiyonu Denklem 1.3 de yerine yazılırsa s konum koordinatı için, elde edilir. 6
23 Örnek 1.1 7
24 Örnek 1.2 8
25 Örnek 1.3 s 9
26 Örnek
27 1.3. Düzlemde Eğrisel Hareket Bu bölümde, maddesel noktanın, tek bir düzlemde yer alan eğrisel bir yörünge boyunca olan hareketini yani 2-Boyutlu eğrisel hareketi inceleyeceğiz. Mühendislik uygulamalarında karşılaşılan maddesel nokta hareketinin büyük bir çoğunluğu düzlemsel hareket olarak gösterilebilir. Hatırlatma Doğrusal hareket ile ilgili kinematik incelemelerde hareketin doğrultusunda herhangi bir değişim meydana gelmediği için yalnızca skalar büyüklükler kullanılabilir. Ancak, eğrisel harekette hareketin doğrultusunda değişim olduğu için hız ve ivmenin de doğrultusunda değişim meydana gelecektir. Bu yüzden eğrisel hareket ile ilgili yapılacak kinematik incelemelerde vektörel büyüklüklerin kullanılması zaruridir. A noktasında yer alan bir maddesel noktanın, yol fonksiyonu (veya yörüngesi) s ile tanımlanan düzlemsel eğri boyunca hareketini göz önüne alalım (Şekil 1.3a). O sabit noktasından ölçülen maddesel noktanın konumu, konum vektörü r = r ( t ) ile belirtilir. Maddesel noktanın konum vektörü, eğri üzerinde hareket ettikçe büyüklüğü ve yönü değiştiği için zamanın bir fonksiyonudur. Küçük bir Δt zaman aralığında maddesel noktanın eğri üzerinde Δs yolunu alarak konumu r' = r + Δr ile tanımlanan A' noktasına geldiğini varsayalım. Δr yer değiştirmesi, maddesl noktanın konumundaki değişimi gösterir ve vektör farkı ile belirlenir, yani Δr = r' - r dir. (a) (b) (c) Şekil
28 Hatırlatma Maddesel nokta yörünge boyunca, A konumundan A' konumuna hareket ederken kat ettiği gerçek mesafe, yörünge boyunca ölçülen skaler Δs uzunluğudur. Bu nedenle, Δr yer değiştirme vektörü ile skaler Δs mesafesi birbirinden farklıdır. Hız Maddesel noktanın A ve A' noktaları arasındaki ortalama hızı v ort = Δr / Δt olarak tanımlanır. Maddesel noktanın anlık hızı, Δt sıfıra yaklaşırken ortamla hızın limit değeri olarak tanımlanır. (1.11) Hatırlatma Bir vektörün türevi, hem şiddeti hem de doğrultusu olan yine bir vektördür. Şekil 1.3a da, Δt sıfıra yaklaşırken, Δr nin doğrultusunun yörüngenin A noktasındaki teğetine yaklaştığını kolaylıkla gözlemleyebiliriz. Bu nedenle (hızın doğrultusu, yer değişimi ile aynı olacağı için) hız her zaman yörüngeye teğettir. Hızın şiddeti olarak tanımlanan v nin büyüklüğü ( v = v ), Δr yer değiştirmesinin büyüklüğünün ( Δr = Δr ) A ile A' birleştiren doğru parçasının uzunluğu olduğuna dikkat ederek, elde edilebilir. Şekil 1.3a da, Δr uzunluğu Δt 0 iken Δs yay uzunluğuna yaklaştığını görüyoruz. O halde, sürat olarak adlandırılan hızın büyüklüğü için; (1.12) elde edilir. Böylece, hızın şiddeti (sürat), s yol fonksiyonu zaman göre elde edildiğini görüyoruz. 12
29 Hatırlatma Hız ( v ) Vektörel büyüklük Sürat ( v ) Skaler büyüklük Şekil 1.3b ve c incelediğimzde açık bir şekilde, Δt süresince hızda vektörel bir değişim bulunduğunu görebiliriz. A noktasındaki v hızı ile Δv değişiminin vektörel toplamı, A' noktasındaki hıza eşittir. Yine, Şekil 1.3c bize, Δv nin, v nin hem büyüklüğündeki hem de doğrultusundaki değişime bağlı olduğunu açıkça göstermektedir. İvme Maddesel nokta, t zamanında v hızına ve t + Δt zamanıda ise v' = v + Δv hızına sahip ise maddesel noktanın ortalama ivmesi a ort = Δv / Δt olarak tanımlanır. Maddesel noktanın anlık ivmesi ise, zaman aralığı sıfıra yaklaşırken ortamla ivmenin limit değeri olarak tanımlanmaktadır. (1.13) Δt aralığı çok küçülüp sıfıra yaklaşırken, Δv değişiminin doğrultusu dv diferansiyel değişiminin dolayısıyla da a nın doğrultusuna yaklaşır. Bu nedenle, a ivmesi v hızının hem büyüklüğündeki hem de doğrultusundaki değişim etkilerini içermektedir. Hatırlatma a ivme vektörü v hız vektörünün hem büyüklüğündeki hem de doğrultusundaki değişim etkilerini içerir. 13
30 (a) Şekil 1.4 (b) İvme ile hız arasındaki Denklem 1.13 ile ilişkiyi daha iyi anlayabilmek için, Şekil 1.4 de inceleyelim. Şekil 1.4a da maddesel noktanın yörüngesi üzerinde üç keyfi konuma karşılık gelen vektörleri ve her konum vektörüne karşılık gelen yörüngeye teğet hız vektörleri gösterilmiştir. Bu hız vektörlerini yönü ve doğrultusu değiştirilmeden herhangi bir C noktasına taşıyalım (Şekil 1.4b). Başlangıç noktası C olan bu hız vektörlerinin uçlarını kesen bir eğri çizelim. Hız vektörlerinin uçlarının geometrik yeri olarak tanımlayacağımız bu eğriye hodograf adı verilir ve hız vektörlerinin türevleri (yani ivme vektörleri) bu eğriye teğet olacaktır. Ayrıca, Şekil 1.4 den, hızın konum vektörü ile ivenin ise hız ile ilgili olduğunu da görmekteyiz. Hatırlatma Hız vektörü ( İvme vektörü ( ) her zaman yörüngeye teğettir. ) her zaman hodografa teğettir Kartezyen (Dik) Koordinatlar ( x y ) Bu koordinat sistemi, özellikle ivmenin x ve y bileşenlerinin birbirinden bağımsız olduğu atış (ya da mermi) hareketi gibi problemlerin tanımlanmasında oldukça kullanışlıdır. Ortaya çıkan eğrisel hareket, konum, hız ve ivme vektörlerinin x ve y bileşenlerinin vektörel toplamları ile elde edilir. 14
31 Şekil 1.5 Şekil 1.5 de, Maddesel Noktanın, r konum, v hız ve a ivme vektörleri x ve y bileşenleri cinsinden gösterilmiştir. i ve j birim vektörler olmak üzere konum, hız ve ivmeyi x ve y bileşenleri cinsinden (1.14a) (1.14b) (1.14c) şeklinde yazılabilir. Hatırlatma Üzeri noktalı ( gibi) ifadeler zamana göre türevi göstermek için kullanılır. Hatırlatma Kartezyen koordinatlarda, birim vektörlerin (i ve j) şiddetlerinin yanında yönleri de sabit kaldığı, değişmediği için, zamana göreve türevleri sıfırdır. Daha öncede vurgulandığı gibi, hızın doğrultusu yörüngeye daima teğettir ve Şekil 1.5 den de açıkça görüldüğü gibi, 15
32 olmaktadır. Atış (Mermi) Hareketi Düzlemsel ( 2 - Boyutlu ) eğrisel hareketin en önemli uygulamalarından bir tanesi artış hareketidir. Atış hareketinde, ivme daima düşey doğrultuda olduğu için çoğunlukla dik bileşenler cinsinden yani kartezyen koordinatlarda inceleme yapılır. Kinematik analizde yer alan kavramları açıklamak için, yerçekimi ivmesinin sabit kabul edildiği, hava direncinin ihmal edildiği bir ortamda, bir merminin hareketini göz önüne alalım (Şekil 1.6). Hava direnci ihmal edildiğinde, mermiye etki eden tek kuvvet, merminin yaklaşık g = 9.81 m/s 2 lik aşağı yönlü sabit bir ivme kazanmasına neden olan ağırlığıdır. Buna göre ivme bileşenleri aşağıdaki gibidir; (1.15a) (1.15b) Şekil
33 Daha öncede belirtildiği gibi, mermi hareketinin x ve y bileşenleri birbirinden bağımsız ve doğrusaldır. Bu nedenle, numaralı sabit ivme denklemleri uygulanabilir. Yatay Hareket (a x = 0) ( +) (1.16a) (1.16b) Düşey Hareket (a y = -g) ( +) (1.17a) (1.17b) (1.17c) v x ve v y bileşenleri elde edildikten sonra, yörüngeye daima teğet olan v bileşke hızı, v x ve v y hızlarının vektörel toplamına eşittir. 17
34 Örnek
35 Örnek
36 Örnek
37 Örnek
38 Normal ve Teğetsel Koordinatlar ( n - t ) Eğrisel hareket yapan bir maddesel noktanın izlediği yol biliniyorsa, hareketi, çoğu zaman, göz önüne alınan anda, orijini maddesel nokta ile çakışan ve yola normal ve teğetsel olarak etkiyen n ve t koordinatları kullanmak uygundur. Bu koordinatlar eğrisel hareketin doğal bir tanımını sağlamakta ve çoğunlukla kullanımı en kolay ve uygun olan koordinatlardır. Normal ve teğetsel koordinatla ile düzlemde eğrisel hareketin kinematiğini incelemek üzere, Şekil 1.7 deki A noktasından C noktasına hareket eden bir maddesel noktanın hareketini göz önüne alalım. Herhangi bir konumda n normal koordinatın pozitif yönü daima yörüngenin eğrilik merkezine doğru olur. Şekil 1.7 de görüldüğü gibi, eğrilik yön değiştiriyorsa, pozitif n - yönü değişecektir. Şekil 1.7 Konum Şekil 1.8 de gösterildiği gibi maddesel noktanın konumu için yörüngesi üzerinde bulunan A noktasındaki n-doğrultusunda e n ve t-doğrultusunda e t birim vektörlerini kullanalım. dt diferansiyel zamanı boyunca, maddesel nokta A noktasından ds ( = ρ dβ ) diferansiyel yolunu kat ederek A' noktasına gelmektedir. Burada ρ ile gösterilen terim yörüngenin A' noktasındaki eğrilik yarıçapını ifade etmekte olup, A ve A' noktaları arasındaki ds diferansyel yolu boyunca, ρ eğrilik yarı çapındaki değişim çok çok küçük olacağından ihmal edilmiş ve ρ sabit kabul edilmiştir. 22
39 Şekil 1.8 Hız Maddesel nokta hareket ettiğinden s yörünge zamanın bir fonksiyonudur. Bölüm 1.3 de de gösterildiği gibi, maddesel noktanın v hız vektörü daima yola (yörüngeye) teğet ve büyüklüğü s = s (t) yol fonksiyonunun zamana göre türevi alınarak belirlenir ve v = ds / dt = ρ dβ /dt olarak yazılabilir. Buna göre hız aşağıdaki gibi vektörel formada yazılabilir. (1.18a) (1.18b) Hatırlatma Birim vektör, boyutsuz ve birim uzunluğa sahip, yön belirlemek için kullanılan vektördür. Hatırlatma Kartezyen koordinatlarda, birim vektörün doğrultusu değişmediği için, (zamana göre) türevi sıfırdır. Eğrisel koordinatlarda ise, birim vektörün doğrultusu değiştiği için, (zamana göre) türevi sıfır değildir. 23
40 İvme Maddesel noktanın ivmesi, hızın zamana göre değişim oranı yani hızın zamana göre türevidir. O halde ivme; (1.19) Burada e t birim vektörünün doğrultusu değiştiği için zamana göre türevi artık sıfır olmayacaktır. e t yi bulmak için, yine Şekil 1.8 da gösterilen, maddesel noktanın A noktası ile A' noktası arasındaki hareketini göz önüne alalım. dt diferansiyel zaman aralığında, maddesel noktanın A noktası ile A' noktası arasındaki hareketi esnasında, e t deki değişimi inceleyelim. dt zaman aralığı sonunda, e t birim vektörü büyüklüğünü korur ancak doğrultusunu değiştirerek e t ' birim vektörüne dönüşür (Şekil 1.8a). Şekil 1.8b den de görüldüğü gibi, e t ' = e t + de t olmalıdır. Burada de t, e t ve e t ' birim vektörlerinin e t = 1 yarıçaplı sonsuz küçük bir yay üzerinde bulunan uçları arasında uzanır. Buna göre, de t nin büyüklüğü de t = de t = e t dβ = 1 dβ dır ve doğrultusu ise e n ile tanımlanır. Sonuç olarak de t için, (1.20) ifadesi elde edilir. Bu ifadenin her iki tarafı dt ile bölünürse, (1.21a) (1.21b) Bu ifade 1.19 numaralı denklemde yerine yazılırsa, 24
41 (1.22) elde edilir. eşitliği kullanılarak (1.22) Denklemi yeniden düzenlenirse, (1.23) elde edilir. Burada, Normal ivme : Teğetsel ivme : İvme büyüklüğü : (1.24a) (1.24b) (1.24c) olarak tanımlanır. Hatırlatma İvme, hızın hem şiddetindeki (yani büyüklüğündeki) hem de doğrultusundaki değişimi yansıtan bir vektördür. Hatırlatma a t Hızın büyüklüğündeki değişimi yansıtır. a n Hızın doğrultusundaki değişimi yansıtır. 25
42 Denklem 1.23 ve 1.24 deki kavramları özetlemek ve yorumlayabilmek için Şekil 1.9 da verilen eğrisel yörünge boyunca hareket eden maddesel noktanın hareketini inceleyelim. 1.) Maddesel nokta bir doğru boyunca hareket ediyorsa, ρ olur ve Denklem 1.24a den a n = 0 olarak bulunur. Böylece olur. Buradan, ivmenin teğetsel bileşeninin hızın büyüklüğünün zamana göre değişim oranını (yani türevini), veya başka bir deyişle hızın büyüklüğündeki değişimi, ifade ettiği sonucunu çıkarabiliriz. 2.) Maddesel nokta, sabit bir hızla bir eğri boyunca hareket ediyorsa, 0 ve olur. O halde, ivmenin normal bileşeninin hızın doğrultusunun zamana göre değişimini ifade ettiği sonucunu çıkarabiliriz. Bu bileşen, daima eğrilik merkezine doğru etkidiğinden, merkezcil ivme olarak da adlandırılır. Şekil
43 Dairesel Hareket Dairesel hareket Şekil 1.10 da gösterildiği gibi, ρ eğrilik yarıçapın çemberin sabit r yarıçapı olduğu ve β açısını yerini herhangi bir uygun radyal referanstan OP ye ölçülen θ açısının aldığı, düzlemde eğrisel hareketin önemli bir özel durumudur. P maddesel noktasının dairesel hareketi için hız ve ivme bileşenleri aşağıdaki hali alır. (1.25a) (1.25b) (1.25c) Şekil
44 Örnek
45 Örnek
46 Örnek
47 Kutupsal Koordinatlar ( r - θ ) Bu bölümde, düzlemde eğrisel hareketin üçüncü durumu, yani maddesel noktanın konumunun, sabit bir noktadan r radyal mesafesi ve radyal çizgiye θ açısal ölçümü ile tanımlandığı, kutupsal koordinatları ele alacağız. Özellikle, bir hareketin radyal bir mesafe ve açısal bir konum ölçüleri ile gözlemlendiği, yerdeki bir radar istasyonundan bir uydu veya bir roketin hareketi incelenirken, kutupsal koordinatlar oldukça kullanışlıdır. Hatırlatma Küresel koordinatlar ( r θ ), silindirik koordinatların ( r θ z ) düzleme indirgenmiş halidir. Şekil 1.11a, eğrisel bir yörünge boyunca hareket eden maddesel noktanın konumunu belirleyen r ve θ kutupsal koordinatlarını göstermektedir. x-ekseni gibi keyfi bir sabit eksen, θ nın ölçümü için referans olarak kullanılmaktadır. e r ve e θ birim vektörleri sırası ile pozitif r ve θ yönleri için kullanılmaktadır (r ve θ doğrultuları birbirine diktir). A noktasındaki maddesel noktanın r konum vektörünün büyüklüğü r = r radyal uzunluğuna eşit ve e r birim vektörü yönündedir: (1.26) A de r Şekil
48 Birim Vektörlerin Zamana Göre Türevleri (1.26) numaralı bağıntının zamana göre türevlerini alarak hız ve ivmeyi elde edebilmek için ve birim vektörleri zamana göre türevlerini belirlememiz gerekmektedir. Bu amaçla, Şekil 1.11b de ki gibi A noktasındaki maddesel noktanın dt süresi boyunca dθ kadar dönerek ilerlediğini düşünelim. Bu durumda birim vektörler ve da aynı açıda dönerek ve ya dönüşürler. Burada vektörel değişimler nin pozitif θ yönünde nın ise negatif r yönünde olduğuna dikkat edilmelidir. Bu durumda vektörel değişimler, (1.27a) (1.27b) olarak ifade edilebilir. ve nin skaler değerleri ve yarıçap olan ve birim vektörlerin şiddeti ile dθ açısının çarpımına eşittir: (1.28a) (1.28b) (1.28a) ve (1.28b) ifadeleri sırası ile (1.27a) ve (1.27b) eşitliğinde yerlerine yazılırsa için, ve (1.29a) (1.29a) elde edilir. Bu ifadelerin her iki tarafı dt ye bölünürse, birim vektörlerin zamana göre türevleri için, 32
49 (1.30a) (1.30b) ifadeleri elde eldir. Hız Birim vektörlerin zaman göre türevlerini belirlediğimize göre, şimdi konum vektörünün zamana göre birinci türevini alarak hız vektörünü, yani (1.31) olarak belirleyebiliriz. Bu ifade, yerine (1.30a) eşitliği yazılarak yeniden düzenlenirse, (1.32) elde edilir. Buradan, Radyal hız : Açısal hız : Hızın büyüklüğü : (1.33a) (1.33b) (1.33c) 33
50 v nin r-bileşeni v r sadece r konum vektörünün uzama oranıdır. v nin θ-bileşeni v θ ise r konum vektörünün dönüşünden kaynaklandığı sonucunu çıkarabiliriz. İvme Maddesel noktanın ivmesi, hızın zamana göre değişim oranı yani hızın zamana göre türevidir. Bu durumda ivme; ) (1.34) olur. (1.34) Eşitliği, ve birim vektörlerinin türevleri için elde edilen ifadeler yerlerine yazılarak yeniden düzenlenirse, ) (1.35) ifadesi elde edilir. Burada, Radyal ivme : Açısal ivme : İvme büyüklüğü : (1.36a) (1.36b) (1.36c) şeklinde yazılabilir. 34
51 Dairesel Hareket r nin sabit olduğu dairesel bir yörüngedeki hareket için, (1.33) ve (1.36) denklemleri aşağıdaki hale gelir, Radyal hız : Açısal hız : Hızın büyüklüğü : (1.37a) (1.37b) (1.37c) Radyal ivme : Açısal ivme : İvme büyüklüğü : (1.38a) (1.38b) (1.38c) Bu tanımlama, teğetsel koordinatlar, n- ve t-bileşenleri, ile elde edilenle aynıdır, burada θ ve t bileşenlerinin yönleri aynıdır, ancak pozitif r-yönü negatif n-yönündedir. Yani kutupsal koordinatların orijininin çevresinde olan dairesel hareket için a r = -a n olmaktadır. 35
52 Örnek
53 Örnek
54 Örnek
55 1.4. Uzayda (3-Boyutlu) Eğrisel Hareket Bir maddesel noktanın bir uzay eğrisi boyunca 3-Boyutlu hareketini tanımlamak için, kartezyen (x-y-z), silindirik (r-θ-z) ve küresel koordinatlar (R-θ-ϕ) sıklıkla kullanılırlar (Şekil 1.12). Bu koordinat sistemlerini tanımlamadan önce, Bölüm de düzlemde eğrisel hareketi tanımlamak için kullandığımız n - t normal ve teğetsel koordinatların uzay hareketi yani 3-boyutlu hareket incelemelerinde kullanışlı olmadığı için burada ele alınmayacağını vurgulayalım. Şekil 1.12 Kartezyen Koordinatlar (x-y-z) İki boyuttan üç boyuta geçmek özel bir zorluk getirmez. R konum vektörü, v hız vektörü ve a ivme vektörü aşağıdaki hale gelecek şekilde Denklem 1.14a-c deki iki boyutlu bağıntılara sadece z - koordinatını ve iki kez türevlerini eklemek gerekir. (1.39a) (1.39b) (1.39c) 39
56 Silindirik Koordinatlar (r-θ-z) Silindirik koordinatlar, düzlemsel harekette ele aldığımız kutupsal koordinatların üç boyutlu hali olup, Bölüm de yaptığımız incelemeye sadece z - koordinatını ve iki kez türevlerini eklemek gerekir. Bu durumda, silindirik koordinatlar için R konum vektörü şu şekilde ifade edilebilir: (1.40) Düzlemsel hareketteki Denklem 1.32 yerine, hız ifadesini aşağıdaki gibi yazabiliriz: (1.41) burada, (1.42a) (1.42b) (1.42c) (1.42d) Benzer şekilde, ivme için, Denklem1.35 e z-bileşeni eklenerek ) (1.43) ifadesi elde edilir. Burada, (1.44a) (1.44b) (1.44c) (1.44d) 40
57 Küresel Koordinatlar (R-θ-ϕ) Bir maddesel noktanın konumunu belirlemek için radyal bir mesafe ve iki açıdan yararlanıldığı küresel koordinatlar, radar ölçümleri gibi uygulamalarda kullanışlı olmaktadır. Küresel koordinatlarda hız vektörü aşağıdaki gibi ifade edilir: (1.45) burada, (1.46a) (1.46b) (1.46c) (1.46d) İvme vektörü ise, (1.47) Şeklide ifade edilir. Burada, (1.48a) (1.48b) (1.48c) (1.48d) 41
58 1.5. Bağıl (İzafi) Hareket Ötelenen Eksenler Önceki konularda, maddesel noktanın hareketini sabit referans eksen takımları yani sabit eksen takımları kullanarak tanımladık. Bu şekilde belirlenen yer değiştirme, hız ve ivme için mutlak ön adı kullanılır. Ancak hareketi tanımlamak veya ölçmek için sabit eksen takımları kullanmak her zaman uygun olmayabilir. Örneğin, söz konusu olan Şekil 1.13 deki gibi birlikte hareket eden gösteri uçaklarının izafi hareket ise, hareketli eksen takımı kullanmak çok daha yararlıdır. Hareketli koordinat sisteminin hareketi, sabit koordinat sistemine göre belirlenmektedir. Yani, Newton mekaniğinde bu sabit sistem, uzayda hareketi olmadığı kabul edilen birincil eylemsizlik sistemidir. Mühendislik açısından, sabit sistem incelenen problem için mutlak hareketin ihmal edildiği herhangi bir sistem olarak alınabilir. Dünya üzerindeki pek çok mühendislik problemi için, sabit referans sistemi olarak dünyanın hareketini ihmal ettiğimiz dünyaya yerleştirilmiş bir eksen takımı alınır. Dünya üzerindeki uyduların hareketi için, orijini dünyanın dönme ekseni üzerinde olan dönmeyen bir koordinat sistemi kullanılır. Gezegenler arası yolculuk için, güneş üzerine yerleştirilmiş dönmeyen bir koordinat sistemi kullanılabilir. Özetle sabit referans sistemin seçimi problemin türüne bağlıdır. Şekil

59 Hatırlatma Bu bölümde, yalnızca ötelenen (dönme yok) hareketli eksen takımlarını dikkate alacağız. Dönen eksen takımları ile ilgili inceleme rijit cisim kinematiğinde ele alınacaktır. Şekil 1.14 de bir düzlemde farklı eğrisel yörüngeler boyunca hareket eden A ve B maddesel noktalarını ele alalım. B maddesel noktasına ötelenen (dönmeyen) x - y eksen takımının orijinini yerleştirerek, B üzerindeki hareketli konumumuzdan A nın hareketini gözlemlemeye çalışalım. x - y eksen takımına göre ölçülen A nın konum vektörü dir. B nin mutlak konumu, sabit X - Y eksen takımının orijininden ölçülen vektörü ile tanımlanır. Buna göre A nın mutlak konumu aşağıdaki gibi tanımlanabilir: (1.49) Hatırlatma A/B indisi: A nın B ye göre hareketi (yada B ye göre A nın hareketi) anlamına gelmektedir. alalaım: Hız ve ivmeyi elde etmek için Denklem 1.49 un zaman göre sırasıyla bir ve ikinci türevleri (1.50) (1.51) Şekil
60 Referans koordinat sisteminin yerleştirileceği hareketli B noktasının seçimi keyfidir. Eğer, Şekil 1.15 de gösterildiği gibi, A noktası hareketli referans sistemin yerleştirilir ise, konum, hız ve ivme için izafi hareket denklemeleri aşağıdaki gibi olur: (1.52) (1.53) (1.54) Buradan, (1.55) (1.56) (1.57) olduğunu görürüz. Şekil
61 Örnek
62 Örnek 1.15 Şekilde görülen tren 90 km/h sabit hızla bir karayolunun üzerinden geçmektedir. Eğer A otomobili yolda 67.5 km/h hızla hareket ediyorsa trenin otomobile göre izafi hızını, yönünü ve şiddetini bulunuz. 46
63 47
64 Birbirine Bağlı Maddesel Noktaların Bağıl (izafi) Hareketi Mühendislik uygulamalarında çok sayıdaki cismin bir birine ip, zincir veya başka bir bağlantı elemanı ile bağlı olduğu durumlar ile sıklıkla karşılaşılır. Böyle durumlarda genellikle, cisimlerinden birinin kinematik değerleri bilinir ve diğer cismin (veya cisimlerin) konum, hız ve ivme gibi kinematik büyüklüklerinin belirlenmesi istenir. Örneğin, Şekil 1.16 da verilen A ve B cisimlerinden, A nın belirli hız ve ivme ile hareket etmesi halinde B nin hız ve ivmesinin belirlemeye çalışalım. Böyle bir problemi kolayca çözebilmek için aşağıdaki adımlara dikkat edilmelidir: 1) Sabit bir O noktası ya da referans düzlem seçilir. Bu noktadan (ya da düzlemden) maddesel noktaların her birine uzanacak şeklide mutlak konum vektörleri işaretlenir. Konum vektörlerinin yönü pozitif yön olarak kabul edilir. 2) İp uzunluğunun hareket sırasında sabit kaldığı kabul edilerek, ip uzunluğu için konum fonksiyonları cinsinden bir ifade yazılır. Maddesel nokta kabulünden dolayı makaraların etrafına sarılı olan ip uzunlukları ihmal edilebilir. 3) İp uzunluğu için elde edilen bu ifade, zaman göre türetilerek hız ve ivme ifadeleri elde edilir. Şekil
65 Bu adımları Şekil 1.16 da verilen sisteme uygulayalım. 1. Adım: O noktası sabit nokta yani referans nokta olarak seçilebilir. 2. Adım: Toplam ip uzunluğu l olmak üzere, konum fonksiyonları cinsinden aşağıdaki ifade yazılabilir: (1.58) elde edilir. 3. Adım: Bu ifadenin zaman göre türevleri alınarak hız ve ivme için aşağıdaki bağıntılar (1.59) (1.60) Denklemleri kullanılarak A nın verilen bir değerine karşılık B nin değerleri rahatlıkla bulunabilir. Burada dikkat edilmesi gereken husus, özellikle daha karmaşık yapılarda, birden fazla nokta sabit nokta olarak seçilebilmesi durumudur. Bu durumda farklı referans noktalardan elde edilen ifadeler farklı olmasına rağmen doğru yorumlama ile harekete dair aynı sonuçları n elde edileceği unutulmamalıdır. Bu durumu daha iyi anlayabilmek için Şekil 1.17 deki örneği inceleyelim. D noktası sabit nokta olarak seçilecek olursa (Şekil 1.17a), ip uzunluğu için, (1.61) ifadesi elde edilir. Buradan hız ve ivme aşağıdaki gibi türetilebilir: (1.62a) (1.62b) 49
66 D (referans nokta) D + + O O O (referans nokta) (a) + + (b) Şekil 1.17 Eğer O noktası sabit nokta olarak seçilecek olursa (Şekil 1.17a), ip uzunluğu için, (1.63) ifadesi elde edilir. Buradan hız ve ivme ise aşağıdaki gibi türetilebilir: (1.64a) (1.64b) Görüldüğü gibi 1.62 ve 1.64 ifadeleri birbirlerinden oldukça farklıdır. Ancak basit bir örnek üzerinden aslında aynı şeyler olduklarını ispatlayabiliriz. A cismi = 2 m/s hızı ile itildiğini düşünelim ifadesine göre = -1 m/s olur. (-) işareti B maddesel noktasının nin tersi yönde yani yukarı doğru hareket ettiğini gösterir ifadesine göre yani O noktası referans nokta olduğu durumda, = 1 m/s olur. Hızın pozitif olması B nin Şekil 1.17b deki yönünde yani yukarı doğru hareket edeceği anlamına gelir. Görüldüğü gibi her 1.62 ve 1.64 ifadeleri matematiksel olarak farklı olsalar da fiziksel olarak aynı şeyi öngörmektedirler. 50
67 Örnek 1.16 B kütlesi 2 m/s lik hızla yukarı doğru hareket ediyorsa A kütlesinin hızını hesaplayınız. Çözüm Bu sistem uzunluğu değişen parçalar içeren tek bir ipten oluşmaktadır. C ( ya da D) noktası referans nokta olarak seçilirse A ve B maddesel noktalarını konum koordinatları sırası ile ve olur. Pozitif yön ise konum vektörünün yönü yani aşağı yöndür ( +). Sistemdeki ipin toplam uzunluğu için aşağıdaki ifade yazılabilir: Bu ifadenin zaman göre türevi alınarak A ve B bloklarının hızları arasındaki ilişki ortaya konabilir. = -2 m/s (yukarı doğru) olduğu zaman = 6 m/s ( +) olur. 51
68 Örnek 1.17 Örnek
69 Örnek
70 Örnek 1.20 Şekilde görülen system de ipin A ucu aşağıya doğru 3.5 m/s lik hızla hareket ediyorsa, B bloğunun hızını belirleyiniz. 54
71 BÖLÜM 2: MADDESEL NOKTANIN KİNETİĞİ: KUVVET ve İVME 2.1. Giriş Newton un ikinci yasasına göre, bir maddesel nokta dengelenmemiş kuvvetlere maruz kaldığında ivmelenecektir. Kinetik, dengelenmemiş kuvvetler ile onların harekette yol açtıkları değişimler arasındaki ilişkileri inceleyen bilim dalıdır. Birinci bölümde, maddesel noktanın kinematiğinin incelemiştik ve incelemelerimizde harekete sebep olan kuvvetleri göz ardı etmiştik. Bu bölümde, Newton un ikinci yasası yardımıyla, kuvvetler ile kinematiği birleştirerek kuvvet, kütle ve hareket içeren mühendislik problemlerine çözüm bulmaya çalışacağız. Kinetik problemlerin çözümünde; Newton un ikinci yasasının doğrudan uygulanması, İş ve Enerji prensiplerinin kullanılması İmpuls ve momentum yöntemleriyle çözüm olmak üzere üç temel yaklaşım vardır. Hatırlatma Kinematik incelemede, konum, hız ve ivmeyi belirlemeye çalışılır. Kinetik incelemede ise, kuvvet, konum, hız ve ivmeyi belirlemeye çalışılır Newton un İkinci Yasası Kuvvet ile ivme arasındaki temel ilişki Newton un ikinci yasası, (2.1) ile verilir. Newton, bu önemli sonucu şöyle bir deney ile elde etmiştir. Üzeri cilalı eğik bir düzlemde bir cisim kuvveti ile harekete geçirip ivmesini ölçmüş; daha sonra aynı cismi farklı kuvvetleri ile harekete geçirip, sırası ile ivmelerini 1
72 ölçmüştür. Daha sonra, Newton yapmış olduğu her bir deneyde uyguladığı kuvvetler ile ölçtüğü ivme değerlerini oranladığında, sabit bir değere eşit olduğunu görmüş. Ayrıca, c sabiti büyük olduğunda maddesel noktanın ivmesinin küçük; c sabiti küçük olduğunda ise maddesel noktanın ivmesinin büyük olduğunu gözlemlemiştir. Burada yola çıkarak, c sabitinin maddesel noktanın hareketlenmesine veya ivmelenmesine karşı gösterdiği direnç olan atalet ile ilgili olması gerektiğini ve c sabitinin ataletin nicel (sayısal) bir ölçüsü olan m maddesel noktanın kütlesine eşit olduğu sonucuna varmıştır. Böylece, Newton yapmış olduğu bu deneylerden elde ettiği bağıntıyı Denklem 2.1 ile tanımlamıştır. Newton un bu deneyden elde etmiş olduğu bir diğer önemli sonuç ise, ivmenin her zaman kuvvet ile aynı yönde olduğudur. Özetle, Newton un ikinci kanunu, dengelenmemiş bir F kuvveti etkisindeki bir maddesel noktanın, yönü kuvvet ile aynı şiddeti ise kuvvet ile doğru orantılı bir a ivme kazandığını ifade eder. Hatırlatma Düzgün doğrusal hareket durumunda (a = 0), ikinci kanun (F = ma) birinci kanunu verir yani maddesel nokta ya duruyordur ya da sabit bir hızla bir doğru boyunca hareket ediyordur. Eylemsiz (Atalet) Referans Sistemi Hareket denkleminin uygulandığı her durumda, ivmenin ölçümlerinin bir eylemsiz referans sisteminden yapılması gerekliliği ortaya çıkar. Böyle bir sistem; dönmez veya sabittir ya da verilen bir doğrultuda sabit bir hızla (sıfır ivme) ötelenir. Böylece farklı iki referans sisteminde bulunan gözlemciler tarafından ölçülen ivme daima aynı kalır. Örneğin, Şekil 2.1 de gösterildiği gibi, bir mutlak a P ivmesi ile hareket eden P maddesel noktasını göz önüne alalım. Gözlemci x, y eylemsizlik eylemsiz sisteminde duruyor ise, a P ivmesi, referans sistemin sabit v 0 hızının 2
73 doğrultu ve büyüklüğüne bakılmaksızın gözlemci tarafından ölçülebilir. Bu durumda ölçülen ivme mutlak (gerçek) ivmedir. Öte yandan, eğer gözlemci eylemsiz olmayan (yani a O' sabit ivmesi ile ötelenen) x', y' referans sisteminde duruyor ise maddesel noktanın ivmesini a P olarak ölçemeyecektir. Bunun yerine, maddesel noktanın a P/O' = a P - a O' bağıl ivmesine sahip olduğu görünür. Bu durumda ölçülen ivme ise maddesel noktanın mutlak (gerçek) ivmesi olmadığı için maddesel noktaya etkiyen kuvvetlerin belirlenmesi için Newton un hareket denkleminde kullanılamaz. Ayrıca, sistem şekilde görüldüğü gibi dönüyor ise, eğrisel bir yörünge üzerinde hareket ettiği görünür. Bu durumda, maddesel noktanın, doğrultusu değiştiği için, diğer ivme bileşenlerine sahip olacaktır. Bu durumda da maddesel noktanın ölçülen ivmesi mutlak ivme olmayacaktır ve Newton un hareket denkleminde kullanılamaz. y' y a O' a P O' Eylemsiz olamayan referans sistemi x' v O P Maddesel noktanın yolu O Eylemsiz referans sistemi x Şekil 2.1 3
74 2.3. Hareket Denklemi Bir maddesel noktaya birden fazla kuvvet etki ederse, bileşke kuvvet, bütün kuvvetlerin toplamı, yani F R = Σ F ile belirlenir. Bu genel durum için hareket denklemi, (2.2) olarak yazılabilir. Bu denklemin uygulamasını açıklamak için Şekil 2.2a da gösterilen P maddesel noktasını göz önüne alalım. ma (a) (b) (c) Şekil 2.2 Maddesel noktanın serbest cisim diyagramını çizerek, maddesel noktaya etki eden her bir kuvvetin büyüklük ve doğrultusunu grafiksel olarak gösterebiliriz (Şekil 2.2b). Bu kuvvetlerin bileşkesi ma vektörünü ortaya çıkardığı için bileşkenin büyüklük ve doğrultusu Şekil 2.2c de gösterilen kinetik diyagramda grafiksel olarak gösterilebilir. Diyagramlar arasındaki eşittir işareti, serbest cisim diyagramı ile kinetik diyagram arasındaki denkliği yani ΣF = ma yı sembolize eder. F R = ΣF = 0 ise, ivmenin sıfır olduğu ve dolayısıyla maddesel noktanın ya durduğu ya da sabit bir hızla bir doğru boyunca hareket ettiğine dikkat etmeliyiz (Newton un birinci kanunu). 4
75 D Alambert İlkesi -ma atalet vektörünü (2.2) Denkleminin her iki tarafına eklersek hareket denklemi, formunda yazılabilir. Buna göre, maddesel noktaya etkiyen kuvvetlere -ma vektörü eklenirse sıfıra eşdeğer bir vektörler sistemi elde edilmiş olacaktır. Bu duruma dinamik denge adı verilir Dinamik Problem Türleri Hareket denklemi uygulanırken iki tip problem ile karşılaşılır. Birincisinde, maddesel noktanın ivmesi ya verilmiştir ya da bilinen kinematik koşullardan doğrudan belirlenebilir. Daha sonra maddesel noktaya etkiyen kuvvetler Denklem 2.2 de yerine koyularak belirlenebilir. İkici tip problemlerde ise, maddesel noktaya etkiyen kuvvetler tanımlanmıştır ve ortaya çıkan hareketi belirtmemiz gerekir. Eğer kuvvetler sabit ise ivmede sabittir ve Denklem 2.2 kolaylıkla uygulanabilir. Ancak kuvvetler; zaman, konum ya da hızın fonksiyonları iseler, Denklem 2.2 hız ve yer değiştirmeyi belirlemek için integral alınması gereken bir diferansiyel denklem halini alır Sınırlandırılmış ve Sınırlandırılmamış Hareket Hareket denklemi ile tanımlana iki farklı fiziksel hareket söz konusudur: 1.) Maddesel noktanın mekanik bağlar ile bağlanmamış olduğu sınırlandırılmamış hareket. Uçmakta olan bir uçağı veya roketin hareketini örnek olarak verebiliriz. 2.) Maddesel noktanın yörüngesinin kısmen veya tamamen sınırlayıcı klavuzlar ile belirlendiği sınırlandırılmış hareket. Bir buz hokeyi topunun yatay düzlemdeki buz yüzeyi tarafından kısmen sınırlandırılmıştır. Raylar üzerinde giden bir tren ve hareketsiz bir mil üzerinde kayan bir bilezik daha fazla sınırlandırılmış harekete örnek olarak verilebilir. Hareketin sınırlandırılma derecesi serbestlik derecesi ile anılır. Örneğin, bir mil üzerinde kayan bir bilezik 5
76 gibi maddesel nokta, sabit doğrusal bir yörünge izleyecek şekilde sınırlandırılmışsa, maddesel noktanın konumu mil boyunca ölçülen tek bir koordinat ile belirlenebilir. Bu durumda maddesel nokta bir serbestlik derecesine sahiptir. Buz hokeyi topunun hareketi, yüzey (yada düzlem) üzerinde hareket edecek şekilde sınırlandırıldığı için maddesel nokta hareketinin iki serbestlik derecesi vardır. Bir uçağın hareketi gibi maddesel nokta uzayda serbestçe hareket ediyor ise herhangi bir anda maddesel noktanın hareketini tanımamak için üç koordinat gerektiğinden, maddesel nokta üç serbestlik derecesine sahiptir. Maddesel Nokta Kinetik Analizinde Çözüm Stratejisi 1.) Hareketin türüne karar verilir. 2.) Uygun koordinat sistemi seçilir. 3.) Serbest cisim diyagramı çizilir. 4.) Hareket denklemi uygulanır. 5.) Kinematik denklemler uygulanır. 6
77 2.4. Doğrusal Hareket Maddesel nokta incelemelerinde, cismin boyutlarını ihmal ederek sadece kütlesinden haiz olduğunu kabul ettiğimizi daha önce vurgulamıştık. Bu basitleştirme, cismin yalnızca kütle merkezinin hareketi ile ilgilendiğimiz sürece mümkün olacaktır. Bu durumda kuvvetleri, kütle merkezine etkiyen eş noktasal kuvvetler olarak ele alacağız. Eş noktasal olmayan kuvvetlerin etkisini rijit cisim kinetiğini incelerken dikkate alacağız. m kütleli maddesel noktanın doğrusal hareketi hangi koordinat doğrultusunda ise sadece o koordinat doğrultusunda ivme söz konusudur diğer koordinatların doğrultusunda ivmeler sıfırdır. Hareketin x doğrultusunda ise y ve z - doğrultularındaki ivmeler sıfır olur ve hareket denkleminin skaler bileşenleri, (2.3a) hareketin y doğrultusunda ise x ve z - doğrultularındaki ivmeler sıfır olur ve hareket denkleminin skaler bileşenleri, (2.3b) hareketin z doğrultusunda ise x ve y - doğrultularındaki ivmeler sıfır olur ve hareket denkleminin skaler bileşenleri, (2.3c) 7
78 Örnek 2.1 8
79 Örnek kg kütleli bir adam bir asansörün içinde, yaylı tartının üzerinde durmaktadır. Duruştan harekete geçilen ilk 3 saniye içerisinde, çekici kablodaki gerginlik kuvveti T = 8300 N dur. Bu süre boyunca tartıda okunan Newton cinsinden R değeri ve 3 saniyenin sonunda asnsörün yukarı doğru hızı v yi bulun. Asansör, adam ve tartının toplam ağırlığı 750 kg dır. 9
80 Örnek
81 Örnek
82 Örnek
83 2.4. Eğrisel Hareket Bu bölümde, düzlemde eğrisel yöürünge boyunca hareket eden maddesel noktanın kinetiğini ele alacağız. Hereket kanunu yani Denklem 2.2 yi uygularken, eğrisel harekette ivme için Bölüm 1.3 de üç farklı koordinat sistemi için elde ettiğimiz tanımları kullanacağız. Uygun koordinat sistemini seçimi, problemin koşullarına bağlıdır ve eğrisel hareket problemlerinin çözümünde verilmesi gereken en temel kararlardan biridir. Kartezyen Koordinatlar (Bölüm 1.3.1) (2.4a) (2.4b) burada ve Teğetsel Koordinatlar (Bölüm 1.3.2) (2.5a) (2.5b) burada, ve Kutupsal (Polar) Koordinatlar (Bölüm 1.3.3) (2.5a) (2.5b) burada ve 13
84 Örnek 2.6 Örnek
85 Örnek
86 Örnek
87 Örnek
88 BÖLÜM 3: MADDESEL NOKTANIN KİNETİĞİ: İŞ ve ENERJİ 3.1. Giriş Bölüm 2 de, bir maddesel nokta üzerine etkiyen net dengelenmemiş kuvvet ile maddesel noktanın sahip olduğu ivme arasındaki ilişkiyi ortaya koymak üzere Newton un ikinci kanunu F = m.a yı ele almış ve hareket denklemini çeşitli hareket problemlerine uygulamıştık. Bu bölümde ise iş ve enerji ilkesini inceleyeceğiz. Genelde bir maddesel noktanın üzerine etkiyen dengelenmemiş kuvvetlerin etkilerinin ortaya çıkardığı iki tip problem vardır: 1.) Kuvvetlerin, maddesel noktanın yer değiştirmesine bağlı olarak integre edildiği problemler. Kuvvetlerin yer değiştirmeye göre integralinin alınması, bu bölümünde konusu olan, iş ve enerji denklemlerini verir. 2.) Kuvvetlerin, uygulandıkları zamana göre integralinin alındığı problemler. Kuvvetlerin zamana göre integralinin alınması ise, bir sonraki bölümde ele alınacak olan, impuls ve momentum denklemlerini verir İş Tanımı İşin tanımını yapmak üzere, bir F kuvveti uygulanan A maddesel noktasının, Şekil 3.1 de gösterilen bir yörünge üzerindeki hareketini ele alalım. Maddesel noktanın A noktasındaki konumu r konum vektörü ile tanımlanabilir. Maddesel noktanın, A noktasından A' noktasına sonsuz küçük hareketinden kaynaklanan yer değiştirme dr yer değiştirme vektörü ile tanımlanabilir. Buna göre, dr yer değiştirmesi boyunca F kuvvetinin yaptığı iş aşağıdaki gibi tanımlanır: (3.1) Hatırlatma İş ve Enerji skaler büyüklüklerdir. olduğuna dikkat edin. Bu nedenle Denklem 3.1 deki çarpımın skaler çarpım 1
89 . Şekil 3.1 Maddesel noktanın Şekil 3.1 deki hareketini, normal ve teğetsel (n-t) koordinat sistemine göre ele aldığımızı düşünelim. Bu durumda, ve olarak yazılabilir. Buna göre, Denklem 3.1 aşağıdaki gibi yeniden düzenlenebilir: (3.2) Skaler çarpım özelliklerini kullanarak bu ifadeyi açtığımızda, (3.3) elde edilir. Skaler çarpımın tanımı gereği, ve dir. Buna göre, (3.4) olarak yazılabilir. Burada, F t = F cosα olduğu Şekil 3.1 de görülmektedir. Bu nedenle, Denklem 3.4 alternatif olarak aşağıdaki gibide yazılabilir, (3.5) 2
90 İşin bu tanımı göre, kuvvetin yer değiştirmeye dik yöndeki bileşeni F n = F sinα nin iş yapmadığına dikkat etmek gerekir. Hatırlatma: İş Tanımı Mekanikte, bir F kuvveti, ancak maddesel nokta kuvvet doğrultusunda yer değiştirmeye maruz kalırsa maddesel nokta üzerinde iş yapmış olur. Eğer kuvvetin iş yapan bileşeni F t, yer değiştirme ile aynı yönde ise iş pozitif, ters yönde ise iş negatif olacaktır. Hatırlatma: İş Birimi du = F dr (N.m = Joule) 3.3. İş Örnekleri Değişken Bir Kuvvetin Yaptığı İş Maddesel nokta, uygulanan kuvvet sonucu izlediği yol boyunca sonlu bir yer değiştirme yapıyorsa, kuvvetin yaptığı iş Şekil 3.2 de gösterildiği gibi, (3.6) integrali alınarak bulunur. Şekil 3.2 3

91 Bir Doğru Boyunca Hareket Eden Sabit Bir Kuvvetin Yaptığı İş Şekil 3.3 de gösterilen, 1 konumundan 2 konumuna giderken maddesel nokta üzerine uygulanan sabit P kuvvetini ele alalım. P kuvvetinin maddesel nokta üzerine yaptığı iş aşağıdaki gibi ifade edilebilir: (3.7) Daha öncede ifade edildiği gibi, bu iş ifadesi, aynı zamanda kuvvetin hareket doğrultusundaki bileşeni Pcosα ile kat edilen L mesafesinin çarpımı olduğunu unutmayınız. Yine, yer değiştirmeye dik yöndeki kuvvet bileşeni Psinα nın iş yapmadığına dikkat ediniz. Şekil 3.3 4
92 Ağırlığın Yaptığı İş Şekil 3.4 de gösterilen, bir yörünge boyunca 1 konumundan 2 konumuna hareket eden bir maddesel noktanın hareketini göz önüne alalım. Yükseklik değişimi boyunca, g = sabit olduğu kabul edilir ise, maddesel nokta ağırlığı mg nin, 1 ve 2 noktaları arasında yer değiştirirken, yaptığı iş şu şekilde tanımlanabilir: (3.8) Yatay hareketin bu işe katkıda bulunmadığını görüyoruz. Ayrıca maddesel nokta (başka kuvvetler etkisi ile) yükselirse olur ve meydana gelen iş negatif olur. Eğer maddesel nokta düşerse olur, bu durumda yapılan iş pozitif olur. Şekil 3.4 5

93 Yay Kuvvetinin Yaptığı İş Şekil 3.5 de gösterilen, yayı uzatmak veya kısaltmak için gerekli kuvvetin x deformasyonu ile orantılı olduğu, yay katsayısı k olan doğrusal bir yayı göz önüne alalım. Maddesel nokta x 1 ilk konumundan x 2 son konumuna keyfi bir yer değiştirme yaptığında, yay tarafından maddesel noktaya uygulanan F = -kxi kuvvetinin maddesel nokta üzerinde yaptığı iş, 3.9 şeklinde ifade edilebilir. Eğer ilk konum, yayın deforme olmadığı konum ise x 1 = 0 olur ve x 2 0 değerleri için iş negatiftir. Öte yandan, x 1 0 ilk konumunda x 2 = 0 son konumuna hareket edersek, iş pozitif olur. Şekil 3.5 6
94 3.4. İş ve Kinetik Enerji Prensibi Maddesel noktanın, üzerine etkiyen tüm kuvvetlerin bileşkesi ΣF i temsil eden F kuvveti etkisi altında, eğrisel bir yörünge boyunca hareket eden m kütleli bir maddesel noktanın üzerine yapılan işi göz önüne alalım (Şekil 3.6). maddesel noktanın konumu r konum vektörü ile tanımlanmakta ve dt zaman aralığında yörüngesi boyunca yaptığı yer değiştirme, konum vektörünün dr değişimi ile temsil edilmektedir. Maddesel noktanın, 1 noktasında 2 noktasına giderken sonlu hareketi sırasında, maddesel noktaya etkiyen F kuvveti tarafından yapılan iş, daha öncede yapıldığı gibi, aşağıdaki şekilde tanımlanabilir: (3.10) Newton un ikinci kanunu F = ma Denklem 3.10 da yerine yazıldığında iş ifadesi aşağıdaki gibi olur: (3.11) Şekil 3.6 7
95 a t ds = v dv ilişkisi kullanılarak iş ifadesi yeniden düzenlenirse, (3.12) elde edilir. Maddesel noktanın kinetik enerjisi T, (3.13) olarak tanımlanır ve durgun bir konumdan v hızına ulaşması için maddesel noktanın üzerine yapılması gereken toplam iştir. Kinetik enerji tanımını dikkate alarak Denklem 3.12 aşağıdaki gibi yeniden düzenlenebilir: (3.14) Bu ifade, 1 noktasından 2 noktasına giderken maddesel noktanın üzerine etkiyen tüm kuvvetlerin yaptığı toplam işin, maddesel noktanın kinetik enerjisindeki değişime eşit olduğunu belirtir. Hatırlatma: İş-Enerji Yönteminin Avantajı Denklem 3.15 den, iş ve enerji yönteminin önemli bir avantajının, ivmeyi hesaplama zorunluluğunun ortadan kaldırması ve iş yapan kuvvetlerin fonksiyonları olarak doğrudan hız değişimlerini vermesi olduğu görüyoruz. 8
96 3.5. Güç Bir makinenin kapasitesi ya da gücü zamana bağlı iş yapabilme veya enerji aktarabilme hızı ya da kapasitesi ile ölçülür. Ne kadar küçük olursa olsun, bir motor yeterli zaman verildiğinde büyük miktarda enerji verebileceği için toplam iş ya da enerji çıkışı bu kapasitenin yani gücün bir ölçüsü değildir. Öte yandan, kısa bir süre içerisinde büyük miktarlarda enerji vermek büyük ve güçlü bir makine gereklidir. Bu nedenle bir makinenin gücü birim zamanda yaptığı iş yada iş yapabilme hızı olarak tanımlanır Görüldüğü gibi, güç skaler bir büyüklüktür ve SI birim sistemine göre birimi Watt = Joule/saniye dir. Hatırlatma: Güç Birimi 1 W = 1 J/s 1 hp = 746 W = kw 3.6. Verim Aynı zaman aralığında bir makinenin yaptığı işin ona yapılan işe oranına, makinenin mekanik verimi, e m adı verilir. Tüm makineler bir miktar enerji kaybı ile çalıştıklarından ve makinenin içerisinde ilave bir enerji üretimi oluşturulmadığından dolayı verim her zaman birden küçüktür. Hareketli parçalar içeren mekanik cihazlarda, sürtünme kuvvetleri nedeniyle her zaman bir miktar enerji kaybı olacaktır. Bu sürtünme işi, ısı enerjisine dönüşür ve ortama yayılır. Herhangi bir andaki mekanik verim, 3.16 olarak tanımlanır. 9
97 Örnek 3.1 Örnek
98 Örnek
99 Örnek
100 Örnek
101 3.7. Potansiyel Enerji Şu ana kadar, iş ve kinetik enerjiden bahsettik ve yer çekimi kuvveti, yay kuvveti ve maddesel noktaya dışarıdan uygulanan diğer kuvvetlerin maddesel nokta üzerine yaptıkları işleri belirledik. Bu kısımda, yer çekimi kuvveti ve yay kuvvetinin yaptıkları işleri ele almak üzere potansiyel enerji kavramının üzerinde duracağız Yer Çekimi Potansiyel Enerjisi Maddesel noktanın yer çekimi potansiyel enerjisi V g, maddesel noktayı V g nin sıfır olarak alındığı keyfi bir referans hattından h mesafesi kadar yukarı çıkarmak için yer çekimine karşı yapılan iş olarak tanımlanır: 3.17 h = h 1 olan bir seviyeden daha yüksek bir h = h 2 seviyesine çıkarken potansiyel enerjisindeki değişim, 3.18 Buna karşılık yer çekimi kuvveti tarafından maddesel nokta üzerine yapılan iş yada maddesel noktanın ağırlığının yaptığı iş mgδh dır (Bölüm e bakınız). Buna göre, yer çekimi tarafından yapılan iş potansiyel enerjinin negatifidir. Şekil
102 Elastik Potansiyel Enerji Potansiyel enerjinin ikinci örneği, yay gibi elastik bir cismin deformasyonu ile oluşur. Bir yayı deforme etmek için üzerine yapılan iş yayda saklıdır ve buna elastik potansiyel enerji V e adı verilir. Bu enerji, yaya uygulanan deformasyon ortana kalkınca yayın hareket eden ucuna iliştirilmiş cisme yapmış olduğu iş olarak geri dönüştürülebilir. Bölüm de ele alınan ve Şekil 3.5 de gösterilen, yay katsayısı k olan tek boyutlu doğrusal yayda yayın deformasyona uğramamış konumundan, çekme ya da basma herhangi bir x deformasyonunda yayın taşıdığı kuvvet F = kx dir. Böylece, yayın elastik potansiyel enerjisini, onu x mesafesi kadar deforme etmek için üzerine uygulanması gereken iş olarak tanımlanır ve şu şekilde ifade edilir: 3.19 Yayın çekme ya da basma deformasyonu, hareketi sırasında, x 1 den x 2 e artarsa, yayın potansiyel enerjisindeki değişim onun son değerinden ilk değerinin çıkarılması ile belirlenir ve pozitiftir: 3.20 Tersi durumda, yani hareket aralığı içerisinde yayın deformasyonu azalırsa, yayın potansiyel enerjisi de azalacağı için, yayın potansiyel enerjisindeki değişim negatiftir. 15
103 3.8. İş Enerji Denklemi Potansiyel enerji türlerini de ele aldığımıza göre, artık Bölüm 3.4 de, iş ve kinetik enerji için elde ettiğimiz iş - enerji denklemine (Denklem 3.14) potansiyel enerji terimlerini de ekleyerek genel formuna kavuşturabiliriz. (3.21) 16
104 Örnek 3.6 Örnek
105 Örnek
106 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini ele aldık. Hız değişimlerinin yapılan iş cinsinden ya da enerjideki toplam değişim cinsinden doğrudan ifade edilebileceğini gördük. Bu bölümde ise, hareket denklemini zamana göre integre edip, impuls ve momentum denklemlerini elde edeceğiz. Uygulanan kuvvetlerin çok kısa zaman zarfında (çarpışma problemlerinde olduğu gibi) veya belirli zaman aralıklarında etkimesi durumunda, impuls ve momentum denklemleri birçok problemin çözümünde büyük kolaylık sağlar Doğrusal İmpuls ve Momentum Uzayda genel eğrisel hareket yapan m kütleli maddesel noktayı göz önüne alalım (Şekil 4.1). Maddesel noktanın konumu O sabit referans sistemi merkezinden ölçülen r konum vektörü ile tanımlanabilir. Maddesel noktanın hızı dir ve daha öncede vurgulandığı üzere hız vektörü yörüngeye teğettir. m kütleli maddesel nokta üzerine etkiyen tüm kuvvetlerin bileşkesi, maddesel noktanın ivmesi yönündedir. Şimdi maddesel noktanın temel hareket denklemini aşağıdaki gibi yazabiliriz, (4.1) Burada kütle ve hızın çarpımı maddesel noktanın doğrusal momentumu G = mv olarak tanımlanır. Denklem 4.1, bir maddesel noktanın üzerine etkiyen kuvvetlerin bileşkesinin, maddesel noktanın doğrusal momentumundaki zamana bağlı değişimine eşit olduğunu ifade eder. SI birim sistemine göre doğrusal momentumun birimi kg m/s = N s dir. 1
107 Şekil 4.1 Denklem 4.1 dinamikteki en yaralı ve önemli bağıntılardan biridir ve maddesel noktanın m kütlesi zamana bağlı olarak değişmediği sürece geçerlidir. Denklem 4.1 skaler bileşenleri cinsinden aşağıdaki gibi yazılabilir: (4.2) Bu denklemler birbirinden bağımsız uygulanabilir. Doğrusal İmpuls-Momentum İlkesi Hareketin gerçekleştiği t 1 - t 2 zaman aralığı içerisinde, bileşke kuvvet in maddesel noktanın momentumu üzerindeki etkisini tanımlamak üzere, Denklem 4.1 zaman göre integrali alınabilir. Buna göre, Denklem 4.1 in her iki tarafını dt ile çarparak elde edilir ve t 1 den t 2 ye kadar integrali alınırsa, (4.3) 2
108 bağıntısı elde edilir. Burada G 1 = mv 1 ve G 2 = mv 2 sırası ile t 1 ve t 2 anındaki doğrusal momentumdur. Kuvvet ile zamanın çarpımı ( ΣF dt ) kuvvetin doğrusal impulsu olarak tanımlanır ve Denklem 4.3, m kütlesi üzerindeki toplam doğrusal impulsun, maddesel noktanın doğrusal momentumundaki değişime eşit olduğunu ifade eder. Denklem 4.3 alternatif olarak, (4.4) formunda yazılabilir. Bu ifade cismin ilk durumundaki doğrusal momentumun artı ona etkiyen doğrusal impulsun son durumdaki doğrusal momentuma eşit olduğunu ifade eder. Denklem 4.4 ün skaler bileşenleri (4.5) Bu üç skaler impuls-momentum denklemi birbirinden tamamen bağımsızdır. Denklem 4.4 ile verilen impuls-momentum ilkesi Şekil 4.2 deki gibi grafiksel olarak gösterilebilir. Bu gösterime impuls-momentum diyagramı adı verilir. Birinci çizim başlangıç momentumu mv 1 i ya da onun bileşenleri, ortadaki çizim, tüm dış doğrusal impulslar ya da bileşenleri, son çizimde ise son durumdaki momentumu mv 2 yi ya da onun bileşenleri gösterilir. 3

109 Şekil 4.2 Bir maddesel noktanın üzerine uygulanan kuvvetin deneysel ölçümler ya da başka yaklaşık yöntemler ile belirlenen, zamana bağlı olarak değiştiği durumlar vardır. Örneğin, eğer belirli bir yönde bir maddesel noktanın üzerine etkiyen F kuvveti t zamanına bağlı olarak Şekil 4.3 de gösterildiği gibi değişiyor ise, t 1 - t 2 zaman aralığı içerisinde, bu kuvvetin impulsu, eğrinin altında kalan alana eşittir. Şekil 4.3 4
110 Doğrusal Momentum Korunumu Belirli bir zaman aralığında maddesel noktanın üzerine etkiyen bileşke kuvvet ΣF = 0 ise, Denklem 4.3 den (4.6) doğrusal momentumun sabit kalması gerektiğini görürüz. Bu duruma maddesel noktanın doğrusal momentumunun korunumu denir. Örnek 4.1 5
111 Örnek 4.2 6
112 Örnek 4.3 7
113 Örnek 4.4 8
114 Örnek 4.5 9
115 4.3. Çarpışma İki cisim çok kısa bir zaman aralığında aralarında nispeten büyük temas kuvvetleri ortaya çıkmasına neden olacak şekilde birbirine çarptığında çarpışma oluşur. Çekicin çiviye veya golf sopasının topa vurması, çarpışma olayının bilinen örnekleridir. Genel olarak iki tip çarpışma vardır. Çarpışan iki maddesel noktanın kütle merkezleri, maddesel noktaların kütle merkezlerinden geçen doğrultu boyunca hareket ediyor ise merkezi çarpışma oluşur (Şekil 4.4a). Bu doğrultuya çarpışma doğrultusu adı verilir. Maddesel noktaların biri ya da her ikisinin hareket doğrultusu, çarpışma doğrultusu ile açı yapıyor ise, bu durumda eğik çarpışma meydana gelir (Şekil 4.4b). Temas düzlemi Temas düzlemi Çarpışma doğrultusu Çarpışma doğrultusu (a) Şekil 4.4 (b) Merkezi Çarpışma Merkezi çarpışma mekaniğini analiz etmek üzere v 1 ve v 1 hızları ile giden m 1 ve m 2 kütleli iki kürenin doğrusal hareketini göz önüne alalım (Şekil 4.5). (a) Eğer v 1 > v 2 olması durumunda çarpışma meydana gelir. (b) İlk temastan sonra, kısa bir süre boyunca küreler arasındaki temas alanının artık büyüyemeyeceği bir duruma kadar artan deformasyon oluşur. Bu anda, her iki küre de aynı v 0 hızıyla hareket ederler (Şekil 4.5b). Temasın geri kalan kısmında, eski hale geri 10
116 dönme süresi oluşur. Bu süre içerisinde temas alanı sıfıra düşer ve küreler birbirinden ayrılır. (c) Küreler birbirlerinden ayrıldıklarında artık yeni v 1 ' ve v 2 ' hızlarına sahiptirler ve burada v 1 ' < v 2 ' olması gerekir (Şekil 4.5c). Tüm hızlar keyfi olarak sağa doğru pozitif kabul edilmiştir ve sola doğru olan hızlar eksi olacaktır. Eğer çarpışma çok şiddetli değil ise ve küreler yeterince elastik ise, eski hale geri dönüş süresi sonunda küreler başlangıçtaki şekillerine geri döneceklerdir. Ancak, aşırı şiddetli bir çarpışma ve yeterince elastik olmayan cisimler söz konusu ise kalıcı deformasyon meydana gelebilir. Çarpışma sırasında temas kuvvetleri eşit ve ters yönlü olduğundan, sistemin doğrusal momentumu değişmez. Dolayısıyla, sistemi için doğrusal momentum korunum ilkesini yazdığımızda, (4.7) ifadesi elde edilir. Çarpışma sırasında temas kuvvetlerine nispeten kürelerin üzerlerine etkiyen diğer kuvvetlerin çok küçük olduğunu kabul ederek ihmal ediyoruz. Şekil
117 Geri Sıçrama Katsayısı Çarpışma problemlerinde v 1 ve v 2 başlangıç hızları ve kütleler bilinir bu durumda Denklem 4.7 v 1 ' ve v 2 ' iki bilinmeyen içerir. Son durumdaki v 1 ' ve v 2 ' hızlarını bulabilmek için bir denkleme daha ihtiyaç vardır. Bu denklem, her bir küreye impuls ve momentum ilkesi uygulanarak elde edilebilir. F r ve F d Şekil 4.6 da görüldüğü gibi, sırası ile eski hale geri dönme ve deformasyon süreleri boyunca temas kuvvetlerinin şiddetlerini temsil etsin. m 1 küresi için deformasyon süresinde impuls ve momentum ilkesi uygulanırsa, (4.8) elde edilir. Geri dönme süresi için, (4.9) elde ederiz. Şekil
118 Geri dönme impulsunun deformasyon impulsuna oranı geri sıçrama katsayısı, e olarak tanımlanır. m 1 küresi için bu değerin, (4.10) olduğu görülür. Benzer şekilde, m 2 küresi için deformasyon süresi ve geri dönme süresi boyunca impuls ve momentum ilkesi uygulanırsa, (4.11) (4.12) elde edilir. m 1 küresi için geri sıçrama katsayısı, e (4.13) olarak elde edilir. Bu denklemler elde edilirken, deformasyon süresi t o olarak, toplam temas süresi ise t olarak alınmıştır. Denklem 4.10 ve 4.13 arasında v 0 yok edilerek e ifadesi için, (4.14) elde edilir. Çarpışmadan sonraki v 1 ' ve v 2 ' hızları 4.7 ve 4.14 Denklemleri kullanılarak hesaplanabilir. 13
119 Çarpışma teorisine göre e = 0 1 arasında değerler alır (Şekil 4.7). e = 1 değeri, iki parçacığın eski hallerine geri dönme kapasitelerinin deforme olma eğilimlerine eşit olduğu ya da deformasyon impulsu geri dönme impulsuna eşit olduğu anlamına gelir. Bu durum, enerji kaybını olmadığı tam elastik çarpışma olarak bilinir. Öte yandan, e = 0 değeri ise, parçacıkların çarpışmadan sonra birbirine takılı kaldıkları ve enerji kaybını maksimum olduğu tam plastik ( ya da inelastik) çarpışma durumunu tanımlar. Bu durumda, geri dönme impulsu yoktur. Şekil Eğik Çarpışma Çarpışan parçaların biri veya her ikisi, çarpışma çizgisiyle bir açı yapıyorsa eğik çarpışma meydana gelir. İki pürüzsüz parçacık arasında eğik çarpışma meydana geldiği zaman, parçacıklar, büyüklüğü ve doğrultusu bilinmeyen hızlarla birbirinden ayrılırlar (Şekil 4.8). Başlangıç hızlarının bilinmesi koşulu ile problem dört bilinmeyen içermektedir. Bu bilinmeyenler, (v 1 ') n, (v 1 ') t, (v 2 ') n, (v 2 ') t dir. Bu dört bilinmeyeni bulmak için dört denkleme ihtiyaç vardır. Bu dört denklem aşağıdaki gibi elde edilir: 14
120 m 1 (v 1 ') n m 1 m 1 (v 1 ) t m 1 m 1 m 1 (v 1 ') t m 1 (v 1 ) n m 2 (v 2 ) n Fdt Fdt m 2 (v 2 ) t m 2 (v 2 ') t m 2 m 2 m 2 Şekil 4.8 m 2 (v 2 ') n 15
121 (1) n - yönünde sistemin momentumu korunur: (4.15) (2) - (3) t yönünde iki maddesel nokta içinde impuls olmayacağı için her bir maddesel nokta için t yönündeki momentum korunur: (4.16) (4.17) (4) Merkezi çarpışmada olduğu gibi, geri sıçrama katsayısı geri dönme impulsunun deformasyon impulsuna pozitif oranıdır: (4.18) Son durumdaki dört hız bileşeni belirlendikten sonra Şekil 4.8 deki ve rahatlıkla bulunur. 16
122 Örnek
123 Örnek
124 4.4. Açısal Momentum Şekil 4.9 uzayda bir eğri boyunca hareket eden m kütleli bir P maddesel noktasını göstermektedir. Maddesel noktanın konumu, sabit x-y-z eksen takımının merkezi O noktasından ölçülen r konum vektörü ile belirlenmektedir. Maddesel noktanın hızı ve doğrusal momentumu dir. Doğrusal momentum vektörü nin O noktasına göre momenti, P maddesel noktasının O noktasına göre açısal momentumu H O olarak tanımlanır ve bir vektörün momentinin hesabında olduğu gibi vektörel çarpım ile belirlenir (Vöktörel işlemler için Giriş Bölümü G3.1 e bakınız). (4.19) Buna göre açısal momentum r ve v vektörleri ile tanımlanan A düzlemine dik olan bir vektördür. yönü vektörel çarpımda sağ-el kuralı ile belirlenir. Açısal momentumun skaler bileşenleri nun açılımından elde edilebilir. Şekil
125 (4.20) Böylece skaler bileşenler aşağıdaki gibi yazılabilir. (4.21) Açısal momentum doğrusal momentumun momentidir ve doğrusal momentum ile karıştırılmamalıdır. SI birim sistemine göre açısal momentumun birimi kg (m/s) m = kg m 2 /s = Nm s dir Açısal Momentumun Değişimi P maddesel noktasına etkiyen kuvvetlerin momentleri ile açısal momentum arasındaki ilişkiyi ortaya koymaya çalışalım. Eğer ΣF Şekil 4.9 daki P maddesel noktasına etkiyen tüm kuvvetlerin bileşkesini temsil diyor ise, O noktasına göre M O momenti vektörel çarpımdan belirlenir: (4.22) Denklem 4.19 un zamana göre türevi alınırsa, 20
126 (4.23a) Paralel vektörlerin vektörel çarpımları sıfır olduğundan (Bölüm G3.1 e bakınız) sıfırdır. terimi (4.23b) ifadesini yerine koyarak, moment ile P maddesel noktasına etkiyen kuvvetlerin momentleri ile açısal momentum arasındaki ilişki için aşağıdaki bağıntı elde edilir: (4.24) Denklem 4.24, P maddesel noktasına etkiyen tüm kuvvetlerin sabit O noktasına göre momentlerinin, P maddesel noktasının O noktasına göre açısal momentumunun zamana bağlı değişine eşit olduğunu belirtir. Denklem 4.24 ün skaler bileşenleri aşağıdaki gibi yazılabilir: (4.25) 21
127 Açısal Momentumun İlkesi Denklem 4.24 moment ile açısal momentumun zamana bağlı değişimi arasındaki anlık bağıntıyı verir. Sonlu bir Δt = t 2 - t 1 zaman aralığında momentinin maddesel noktanın açısal momntumu üzerindeki etkisi belirlemek için, Denklem 4.24 ün t 1 zamanından t 2 zamanına kadar integre edilmesi gerekir. (4.26) burada ve dir. Moment ile zamanın çarpımı açısal impuls olarak tanımlanır. Denklem 4.26, sonlu bir (Δt = t 2 - t 1 ) zaman aralığında sabit bir O noktasına göre P maddesel noktası üzerindeki toplam açısal impulsun, P maddesel noktasının O noktasına göre açısal momentumundaki değişime eşit olduğunu ifade etmektedir. Denklem 4.26 nın daha çok kullanılan alternatif formu aşağıdaki gibidir: (4.27) Bu ifade, maddesel noktanın ilk durumundaki açısal momentumu ile uygulanan açısal impuls toplamının ikinci durumdaki açısal momentuma eşit olduğunu ifade eder. açısal impulsun birimi açısal momentum ile aynıdır (Nm s veya kg m 2 /s ). 22
128 Denklem 4.27 nin skaler bileşenleri, Denklem 4.21 de göz önüne alınarak. x- bileşeni (4.28a) y- bileşeni (4.28b) z- bileşeni (4.28c) Bu denklemlerde 1 ve 2 alt indisleri ilgili büyüklüklerin t 1 ve t 2 zamanlarına karşılık gelen değerlerini göstermektedir. 23
129 Düzlemsel Hareket Uygulamaları Buraya kadar açısal-impuls ve açısal-momentum için yapılan analizler genel üç boyutlu durum için gerçekleştirilmişti. Ancak, birçok uygulamada, momentin hareket düzlemine dik yönde tek bir eksene göre alındığı düzlemsel hareket problemleri ile karşılaşmak mümkündür. Bu durumda, açısal momentumun şiddeti ve yönün değişse de vektörün doğrultusu değişmeden kalır. Böylece, x-y düzleminde eğrisel bir yörünge üzerinde hareket eden m kütleli maddesel nokta için (Şekil 4.10) 1 ve 2 noktalarında O ya göre açısal momentumlarının şiddetleri sırasıyla ve dir. Denklem 4.27 nin t 1 - t 2 zaman aralığında 1 ve 2 noktaları arasındaki harekete uygulanırsa aşağıdaki skalaer form elde edilir: (4.29) Şekil
130 Açısal Momentum Korunumu Belirli bir zaman aralığında maddesel noktanın üzerine etkiyen ΣF bileşke (toplam) kuvvetin sabit O noktasına göre momentleri sıfır ΣM O = 0 ise, Denklem 4.24, o noktaya göre maddesel noktanın açısal momentumu H O sabit kalır. (4.30) Bu durum, bizlere, maddesel noktanın açısal momentumun korunduğunu gösterir. 25
131 Örnek 4.8 Örnek
132 Örnek 4.10 Örnek
133 Örnek kg lık küre ile 4 kg lık blok düşey düzlemde, O dan geçen yatay eksen etrafında dönen kütlesi ihmal edilebilir bir kola bağlanmıştır. 2 kg lık tapa A da duruştan harekete bırakılır ve kol yatay konuma geldiğinde bloktaki oyuğun içine düşer. Bu temastan hemen önce kolun açısal hızı dir. Tapa oyuğun içine yerleştikten sonra kolun açısal hızı yı belirleyin. 28
134 Örnek 4.13 Sistem duruştan harekete başlar ve t saniye boyunca ipe uygulana 20 N luk T kuvvetinin etkisi altında 150 dev/dak lık bir açısal hıza ulaşır. t ' yi belirleyin. Sürtünmeyi ve maddesel nokta olarak ele alınabilen 3 kg lık küreler hariç diğer kütleleri ihmal edin. 29
135 Örnek 4.14 m kütleli bir maddesel nokta yatay yüzeyde ihmal edilebilir sürtünme ile hareket etmekte olup O noktasına sabitlenmiş hafif yaya bağlı durumdadır. A konumunda maddesel noktanın hızı v A = 4 m/s dir. Maddesel nokta B konumundan geçerken hızı v B yi belirleyin. 30
136 BÖLÜM 5: MADDESEL NOKTANIN KİNETİĞİ: İZAFİ HAREKET 5.1. Giriş Maddesel noktanın kinetiğine (Newton ikinci kanunu, iş-enerji, impuls - momentum) dair incelemelerimizi, şu ana kadar hep sabit bir referans sistemine göre gerçekleştirdik ve mutlak hareketi göz önüne aldık. Oysaki, Şekil 5.1 de de görüldüğü gibi, bir uçak gemisine uçağın inişi gibi problemlerde uçak ve geminin birbirlerine göre izafi hareketleri oldukça önemlidir. Bu bölümde, üzerine kuvvet etkiyen bir maddesel noktanın, sabit bir eksen takımına göre öteleme hareketi yapan bir eksen takımından gözlemlenen izafi hareketini ele alacağız. Şekil 5.1 Üzerine ΣF bileşke kuvveti etkiyen m kütleli A maddesel noktasının, sabit X-Y-Z eksen takımına göre ötelenen x-y-z eksen takımından ölçülen hareketini göz önüne alalım (Şekil 5.2). x-y-z koordinat sistemi başlangıç noktası B nin ivmesi olsun. A nin x-y-z koordinat sisteminden ölçülen ivmesi olur. Daha önce Bölüm 1.5 de ele alındığı gibi izafi hareket ilkesinden A nın mutlak ivmesi aşağıdaki gibi olacaktır. 1
137 (5.1) Böylece Newton un ikinci kanunu: (5.2) Şeklinde olacaktır. Buradan kolaylıkla, olduğunu görürüz ve bu nedenle Newton un ikinci kanunu ivmelenen bir eksen takımına göre doğru sonuç veremeyeceği sonucu ortaya çıkar. Hatırlatma: Öteleme hareketi dönme olmadığı anlamına gelir. Böylece x - y - z referans sisteminin doğrultuları her zaman X Y - Z referans sisteminin doğrultularına paralel kalır. Bu nedenle, doğrultu değişiminden kaynaklanan ivme bileşeni söz konusu olmaz. Şekil 5.2 2

138 Hatırlatma: D Alambert Prensibi 5.2. Sabit Hızlı ve Dönmeyen Eksen Takımı Sistemleri Maddesel noktanın hareketini, hareketli referans sistemlerine göre ele alırken referans sisteminin sabit hıza sahip olduğu ve dönme yapmadığı özel durumları dikkate almamız gerekir. Şekil 5.1 deki x-y-z eksen takımının hızı sabit ise olur ve maddesel noktanın mutlak ivmesi (5.3) olacaktır. Yani sabit referans sistemine göre ölçülen maddesel noktanın mutlak ivmesi, hareketli referans sistemine göre ölçülen izafi ivmesine eşit olur. Bu durumda hareket denklemi, (5.4) olarak yazılabilir. Bu ifade bize, Newton un ikinci kanununun, sabit hızla ötelenen bir referans sistemine göre yapılan ölçümler için geçerli olduğunu göstermektedir. Benzer şekilde sabit referans sistemi için elde ettiğimiz iş-enerji, doğrusal impuls-momentum ve açısal impuls momentum korunum denklemleri, sabit hızla ötelenen referans sistemine göre gerçekleştirilen ölçümler için de geçerli olacaktır. 3
139 (5.5) (5.6) (5.7) 4
140 Örnek 5.1 5
141 Örnek 5.2 Arkası düz yüzeyli kamyon yüzde 15 eğimli yoldan yukarıya doğru 60 km/h sabit hız ile giderken taşıdığı 100 kg lık sandığa bir itme kuvveti verilerek kamyonun arka tarafına doğru 3 m/s lik izafi hıza sahip olması sağlanıyor. Eğer sandık kamyon yüzeyi üzerinde durana kadar 2 m lik bir mesafe kayıyor ise sandık ile kamyon yüzeyi arasındaki kinetik sürtünme katsayısı μ k yı hesaplayın. 6
142 Örnek 5.3 7
143 8
144 BÖLÜM 6: MADDESEL NOKTALAR SİSTEMİNİN KİNETİĞİ Newton un Genelleştirilmiş İkinci Yasası İş-Enerji İmpuls-Momentum Enerji ve Momentumun Korunumu
145
146 Genelleştirilmiş Newton un 2. Yasası F 1 m kütleli sistemin hareket denklemi F 3 F 2 : Sistemin toplam kütlesi : Sistemin kütle merkezinin ivmesi Herhangi bir maddesel noktalar sistemine etkiyen dış kuvvetlerin bileşkesi, sistemin kütlesi ile kütle merkezinin ivmesinin çarpımına eşittir.
147 İş - Enerji : Sistemin toplam kütlesi : m i maddesel noktasının hızı m kütleli sistemin iş-kinetik enerji denklemi : Sistem üzerine etkiyen dış kuvvetlerin yapmış olduğu toplam iş : Sistemin kinetik enerjisindeki toplam değişim. : Sistemin toplam kinetik enerjisi

148 İş - Enerji m kütleli sistemin genel iş-enerji denklemi
149 İş - Enerji Kütle sisteminin kinetik enerjisi için şeklinde tanımlanan ifadeyi izafi hareket bilgilerimizi kullanarak biraz daha detaylı ele alalım. m kütleli sistemin toplam kinetik enerjisi : Sistemin kütle merkezinin hızı
150 İş - Enerji m kütleli sistemin toplam kinetik enerjisi sistemin kütle merkezinin ötelenme kinetik enerjisi Kütle merkezine göre maddesel noktaların kinetik enerjileri Bir kütle sisteminin toplam kinetik enerjisi, sistemin kütle merkezinin ötelenme kinetik enerjisi ile kütle merkezine göre tüm maddesel noktaların hareketinden doğan maddesel noktaların kinetik enerjileri toplamına eşittir.

151 Enerji Korunumu

152 Doğrusal İmpuls - Momentum : Sistemin toplam kütlesi : m i maddesel noktasının hızı m kütleli sistemin toplam doğrusal momentumu : Sistemin kütle merkezinin hızı Zamana göre türev alınırsa Herhangi bir maddesel noktalar sistemi üzerine etkiyen dış kuvvetlerin bileşkesi, sistemin doğrusal momentumunun zamana bağlı değişimine eşittir.
 bileşke momenti, sistemin açısal momentumunun zamana bağlı değişimine")
153 Açısal İmpuls Momentum: Sabit O noktasına Göre : Sistemin toplam kütlesi : m i maddesel noktasının (mutlak) hızı m kütleli sistemin O noktasına göre toplam açısal momentumu Zamana göre türev alınırsa Herhangi bir maddesel noktalar sistemi üzerine etkiyen dış kuvvetlerin (sabit bir noktaya göre) bileşke momenti, sistemin açısal momentumunun zamana bağlı değişimine eşittir.
154 Açısal İmpuls Momentum: G Kütle Merkezine Göre : Sistemin toplam kütlesi : m i maddesel noktasının (mutlak) hızı m kütleli sistemin G noktasına göre toplam açısal momentumu Zamana göre türev alınırsa : m i maddesel noktasının G kütle merkezine göre izafi hızı Herhangi bir maddesel noktalar sistemi üzerine etkiyen dış kuvvetlerin (sabit bir noktaya göre) bileşke momenti, sistemin açısal momentumunun zamana bağlı değişimine eşittir.
155 Açısal İmpuls Momentum: Keyfi bir P Noktasına Göre : Sistemin toplam kütlesi : m i maddesel noktasının (mutlak) hızı m kütleli sistemin P noktasına göre toplam açısal momentumu Herhangi bir P noktasına göre açısal momentum, kütle merkezi G ye göre açısal momentum ile sistemin doğrusal momentumunun P noktasına göre momentinin toplamına eşittir.


156 Açısal İmpuls Momentum: Keyfi bir P Noktasına Göre Zamana göre türev alınırsa Herhangi bir P noktasına göre, sistem üzerine etkiyen kuvvetlerin bileşke momenti, kütle merkezindeki açısal momentumun zamana bağlı değişimi ile sistemin kütle merkezine indirgenmiş olan bileşke kuvvet çiftinin P noktasına göre momentleri toplamına eşittir.
157 Açısal İmpuls Momentum: Keyfi bir P Noktasına Göre : Sistemin toplam kütlesi : m i maddesel noktasının P noktasına göre (izafi) hızı m kütleli sistemin P noktasına göre toplam izafi açısal momentumu
158 Açısal İmpuls Momentum: Keyfi bir P Noktasına Göre Zamana göre türev alınırsa Moment merkezi olarak seçilen P noktasının a p ivmesi bilindiği zaman bu bağıntı yararlıdır.

159 Açısal İmpuls Momentum: Keyfi bir P Noktasına Göre
160 Momentum Korunumu

161 Örnek 6.1 m kütlesindeki üç topun herbiri, kütlesi ihmal edilebilen bir açısal kafese kaynak edilmistir. Sistem sürtünmesiz yatay bir düzlemde bulunmaktadır. Eğer ani bir F kuvveti sekilde gösterildiği gibi bir çubuğa uygulanırsa a) O noktasının ivmesini b) Çubuk sisteminin açısal ivmesini hesaplayınız.
162


163 Örnek kg kütlesindeki bir bomba 0 noktasında z-x düsey düzleminde 300 m/s ilk hızı ile sekilde gösterildiği eğimle fırlatılıyor. Bomba yörüngenin en yüksek noktasına eristiğinde patlayıp A, B ve C parçalarına bölünüyor. Patlamadan sonra A parçasi dikey olarak 500 m. yükseliyor, B yatay v B hızına sahip ve Q noktasında yere çarpıyor. A, B ve C nin kütleleri 5kg, 9kg ve 6kg oldukları parçalar bulunduktan sonra tespit ediliyor. C nin patlamadan hemen sonraki hızını bulunuz. Atmosferik sürtünmeyi ihmal edin.
164
165


166 Örnek 6.3 sistemin kütle merkezinin ötelenme kinetik enerjisi maddesel noktaların kinetik enerjileri
167
168
169 Örnek 6.4 Üç küçük küre, O dan geçen düşey bir eksen etrafında yatay düzlemde = 20 rad/s ile dönen hafif rijit çerçeveye kaynaklanmıştır. Çerçeve 5 saniye boyunca M O =30 Nm lik bir moment uygulanıyor ise yeni açısal hızını hesaplayınız. m 1 m 3 m 2
170
171
172 Örnek 6.5
173
174
175 BÖLÜM 7: Rijit Cisimlerin Düzlem Kinematiği Giriş Dönme Genel Düzlemsel Hareket
176 GİRİŞ Maddesel noktanın kinematiği ilgili bölümde, maddesel noktanın doğrusal veya eğrisel bir yörünge boyunca hareketi esnasında ortaya çıkan yer değiştirme, hız ve ivmeleri veren bağıntıları geliştirdik. Rijit cisim kinematiğinde de bu bağıntıları kullanırız, ancak cismin dönme hareketini de dikkate almak zorundayız. Rijit cisim kinematiği, doğrusal ve açısal yer değiştirmeleri, (doğrusal ve açısal) hızları ve (doğrusal ve açısal) ivmelerin belirlenmesini kapsar.


177 GİRİŞ Rijt Cisim Kabulü? Kuvvet veya moment etkisi altında şekil değişimine uğramayan (veya ihmal edilebilir şekil değişimine uğrayan) cisimlere rijit cisim denir. (Genel tanım) Hareket esnasında şekil değişimine uğramayan cisimlere rijit cisim denir (Dinamik e özel tanım)
178 GİRİŞ Bir rijit cisim düzlemsel hareket ettiğinde onu oluşturan tüm parçalar paralel düzlemlerde hareket eder. Rijit Cismin Düzlemsel Hareketi Öteleme Sabit bir eksen etrafında Dönme Genel Düzlemsel Hareket (Öteleme + Dönme) Doğrusal Eğrisel
; Hareket yörüngeleri eşit uzaklıklı eğriler ise harekete eğrisel öteleme")
179 GİRİŞ Öteleme: Cisim üzerindeki herhangi bir AB çizgisi hareket esnasında başlangıçtaki doğrultusuna paralel kaldığı hareket türüdür. AB çizgisini oluşturan A ve B parçalarının yörüngeleri eşit uzaklıktaki doğrular ise harekete, doğrusal öteleme (Şekil a); Hareket yörüngeleri eşit uzaklıklı eğriler ise harekete eğrisel öteleme (Şekil b) adı verilir. Sabit bir eksen etrafında Dönme: Dönme ekseni üzerinde bulunan parçalar hariç diğer parçaların dairesel yörünge üzerinde hareket ettiği hareket türüdür (Şekil c). Genel Düzlemsel Hareket: Öteleme ve dönme hareketinin birleşimidir (Şekil d).
180
181 GİRİŞ Krank - Biyel Mekanizması

182 DÖNME Bir rijit cismin dönmesi açısal hareketi ile tarif edilir. Yandaki şekilde, düzlemsel hareket yaparken dönen bir cisim gösterilmiştir. Cismin içerisindeki herhangi iki hattın açısal konumları sabit bir eksene göre θ 1 ve θ 2 olarak belirtilebilir. 1 ve 2 hattı arasındaki β açısı değişmediği için θ 2 = θ 1 + β ilişkisi sabit kalacaktır. Bir rijit cismin hareket düzleminde, rijit cisim üzerindeki tüm noktaların (veya parçaların) açısal hız ve ivmeleri eşittir.
183 DÖNME: Açısal Hareket İlişkileri Bu bağıntılarda pozitif yön, saat ibresi veya saat ibresi tersi yönde, θ için seçilen yön ile aynıdır.
184 DÖNME: Sabit Bir Eksen Etrafında Dönme Aşağıdaki şekilde de görüldüğü gibi, O noktasından geçen şekil düzlemine dik sabit bir eksen etrafında dönen rijit cisim üzerindeki A gibi herhangi bir nokta r yarıçaplı bir daire üzerinde hareket edecektir.
185 DÖNME: Sabit Bir Eksen Etrafında Dönme Vektörel Form Açısal Hız Açısal İvme
186
 Volanın açısal hızını saat ibresi yönünde 900 dev/dk ya düşürebilmesi için gerekli zamanı, b) Volanın dönme yönünü değiştirebilmesi için gerekli süreyi, c) Döndürme momentinin")
187 Örnek 7.1 Saat ibresi yönünde 1800 dev./dak hızda serbestçe dönen volan, saat ibresi tersi yönde uygulanan döndürme momenti sonucu α = 4t rad/s lik değişken bir açısal ivmeye maruzdur. Buna göre, a) Volanın açısal hızını saat ibresi yönünde 900 dev/dk ya düşürebilmesi için gerekli zamanı, b) Volanın dönme yönünü değiştirebilmesi için gerekli süreyi, c) Döndürme momentinin uygulanmaya başladığı zamandan sonraki 14 saniyede volan tarafından gerçekleştirilen toplam devir sayısını belirleyiniz.
188
189
190 Örnek 7.2 Vinç motorunun A pinyon dişlisi vinç tamburuna bağlanmış olan bir B dişlisini tahrik etmektedir. L yükü durgun konumdan yukarı doğru kaldırılmakta ve sabit bir ivme ile düşeyde 0.8 m yükselme sonunda yukarı doğru 2 m/s hıza ulaşmaktadır. Yük bu konumdan geçerken, (a) Tambu rile temas eden kablo üzerindeki C noktasının ivmesini, (b) A pinyon dişlisinin açısal hızını ve açısal ivmesini belirleyiniz.
191 Örnek 7.2 (Devam)
192
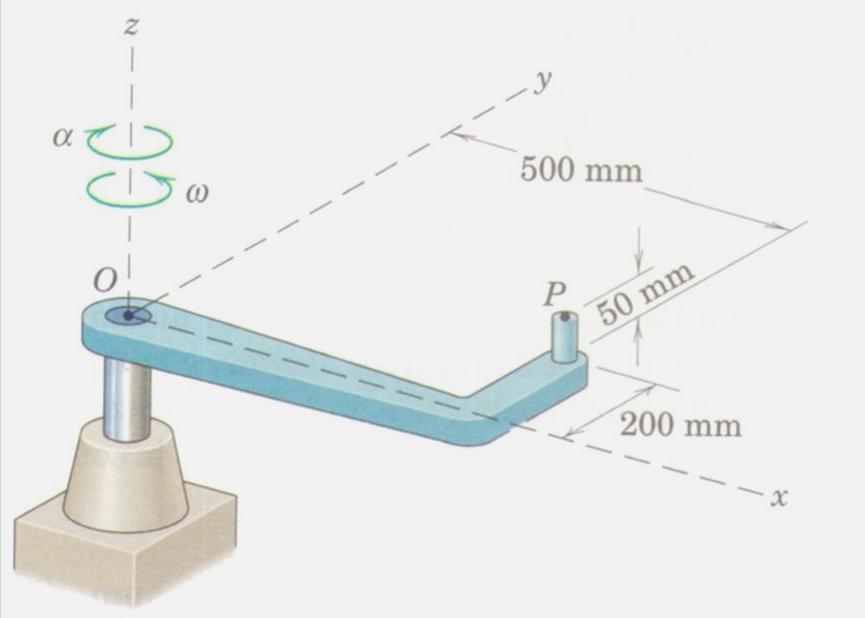
193 Örnek 7.3
194
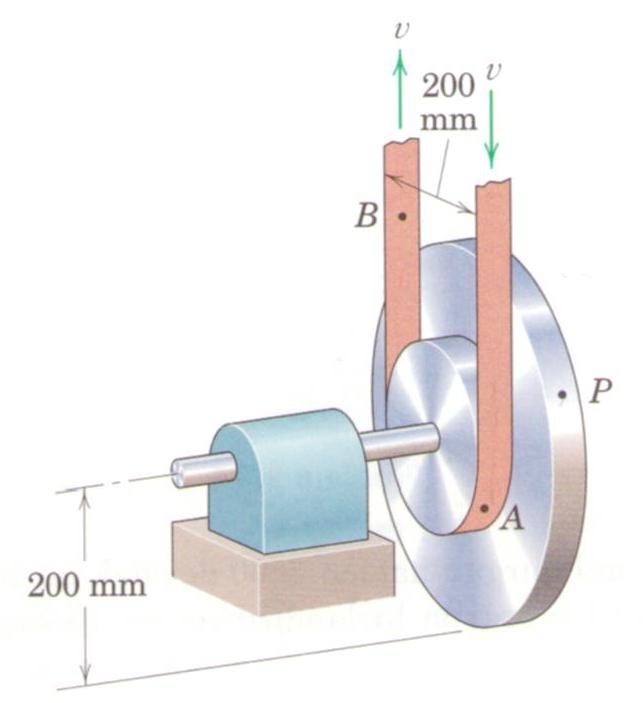
195 Örnek 7.4
196
197 Örnek 7.5 Düşey eksenli rüzgar türbini parabolik şekilli iki kanttan oluşmaktadır. Başlangıçta hareketsiz olan kanatlar α c = 0.5 rad/s 2 sabit açısal ivmesi ile dönmeye başladığına göre, bir kanat üzerindeki A ve B noktalarının, t = 4 s sonraki hız ve ivmelerinin büyüklüklerini belirleyiniz.
198
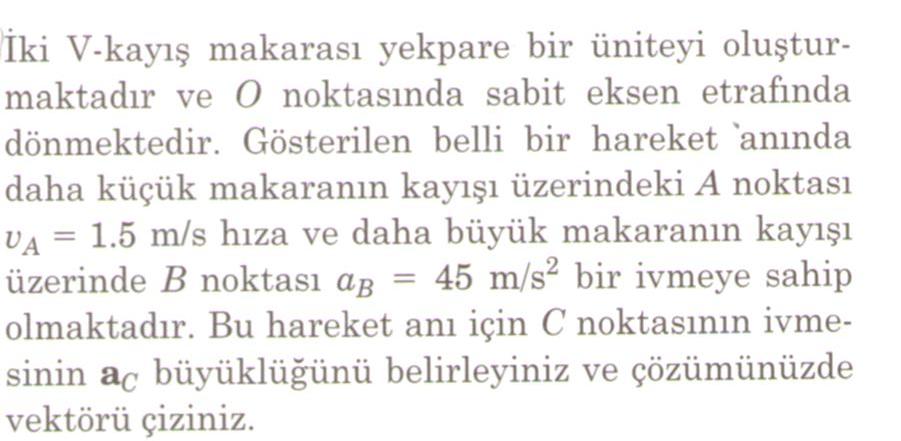
199 Örnek 7.6
200 GENEL DÜZLEMSEL HAREKET: Mutlak Hareket ÇÖZÜM STRATEJİSİ Konum koordinat denklemi Zamana göre türevler
201 Örnek 7.7 r yarıçaplı bir tekerlek kaymadan bir yüzey üzerinde yuvarlanmaktadır. O merkezinin doğrusal hareketi cinsinden tekerleğin açısal hareketini belirleyiniz.
202 Örnek 7.8
203
204 Örnek 7.9
205 Örnek 7.9 (Devam)
206
207
208 Örnek 7.10
209

210 Örnek 7.11
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
STATİK YRD.DOÇ.DR. KAMİLE TOSUN FELEKOĞLU
 STATİK YRD.DOÇ.DR. KAMİLE TOSUN FELEKOĞLU http://kisi.deu.edu.tr/kamile.tosun/ 2011-2012 BAHAR - ÇEVRE KT 1 KİTAPLAR Mühendislik Mekaniği - Statik, R.C. Hibbeler, S.C. Fan, Literatür Yayıncılık, ISBN:
STATİK YRD.DOÇ.DR. KAMİLE TOSUN FELEKOĞLU http://kisi.deu.edu.tr/kamile.tosun/ 2011-2012 BAHAR - ÇEVRE KT 1 KİTAPLAR Mühendislik Mekaniği - Statik, R.C. Hibbeler, S.C. Fan, Literatür Yayıncılık, ISBN:
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Maden Mühendisliği Bölümü MDM 240 Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No:
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Maden Mühendisliği Bölümü MDM 240 Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No:
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
DİNAMİK MEKANİK. Şekil Değiştiren Cisimler Mekaniği. Mukavemet Elastisite Teorisi Sonlu Elemanlar Analizi PARÇACIĞIN KİNEMATİĞİ
 DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Doç.Dr. Cesim ATAŞ MEKANİK ŞEKİL DEĞİŞTİREN CİSİMLER MEKANİĞİ DİNAMİK
 STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
STATİK DOÇ.DR. KAMİLE TOSUN FELEKOĞLU. Ders notları için: GÜZ JEOLOJİ MÜH.
 STATİK STATİK DOÇ.DR. KAMİLE TOSUN FELEKOĞLU Ders notları için: http://kisi.deu.edu.tr/kamile.tosun/ 2014-2015 GÜZ JEOLOJİ MÜH. ÖÖ/İÖ 54-58 2 Değerlendirme 1. Ara sınav (%25) 2. Ara sınav (%25) Final (%50)
STATİK STATİK DOÇ.DR. KAMİLE TOSUN FELEKOĞLU Ders notları için: http://kisi.deu.edu.tr/kamile.tosun/ 2014-2015 GÜZ JEOLOJİ MÜH. ÖÖ/İÖ 54-58 2 Değerlendirme 1. Ara sınav (%25) 2. Ara sınav (%25) Final (%50)
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Gök Mekaniği: Eğrisel Hareket in Kinematiği
 Gök Mekaniği: Eğrisel Hareket in Kinematiği Bundan bir önceki giriş yazımızda Kepler yasaları ve Newton ın hareket kanunlarını vermiş, bunlardan yola çıkarak gök mekaniklerini elde edeceğimizi söylemiştik.
Gök Mekaniği: Eğrisel Hareket in Kinematiği Bundan bir önceki giriş yazımızda Kepler yasaları ve Newton ın hareket kanunlarını vermiş, bunlardan yola çıkarak gök mekaniklerini elde edeceğimizi söylemiştik.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
İNŞ 1012 STATİK. Ders notları
 İNŞ 1012 STATİK Ders notları Doç.Dr. Burak Felekoğlu İnşaat Müh. Bölümü, Yapı Malzemesi Laboratuvarı 2.kat Tel: 0 232301 7041 Ders Saatleri - ÖÖ: Çarşamba 8:30-9:15 9:30-11:15 İÖ: Perşembe: 18:50-19:35
İNŞ 1012 STATİK Ders notları Doç.Dr. Burak Felekoğlu İnşaat Müh. Bölümü, Yapı Malzemesi Laboratuvarı 2.kat Tel: 0 232301 7041 Ders Saatleri - ÖÖ: Çarşamba 8:30-9:15 9:30-11:15 İÖ: Perşembe: 18:50-19:35
HAREKET HAREKET KUVVET İLİŞKİSİ
 HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ
 İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ 1.1. FİZİKTE ÖLÇME VE BİRİMLERİN ÖNEMİ... 2 1.2. BİRİMLER VE BİRİM SİSTEMLERİ... 2 1.3. TEMEL BİRİMLERİN TANIMLARI... 3 1.3.1. Uzunluğun
İÇİNDEKİLER xiii İÇİNDEKİLER LİSTESİ BÖLÜM 1 ÖLÇME VE BİRİM SİSTEMLERİ 1.1. FİZİKTE ÖLÇME VE BİRİMLERİN ÖNEMİ... 2 1.2. BİRİMLER VE BİRİM SİSTEMLERİ... 2 1.3. TEMEL BİRİMLERİN TANIMLARI... 3 1.3.1. Uzunluğun
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
3-1 Koordinat Sistemleri Bir cismin konumunu tanımlamak için bir yönteme gereksinim duyarız. Bu konum tanımlaması koordinat kullanımı ile sağlanır.
 Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
STATİK. Yapı Malzemesi Laboratuvarı 2.kat Tel: Ders Saatleri: Cuma :45
 STATİK YRD.DOÇ.DR. KAMİLE TOSUN Yapı Malzemesi Laboratuvarı 2.kat Tel: 0 232 412 7059 E-mail: kamile.tosun@deu.edu.tr Ders Saatleri: Cuma 13.00-15:45 2010/2011 Bahar yy. Çevre Müh. KT 1 KİTAPLAR Mühendislik
STATİK YRD.DOÇ.DR. KAMİLE TOSUN Yapı Malzemesi Laboratuvarı 2.kat Tel: 0 232 412 7059 E-mail: kamile.tosun@deu.edu.tr Ders Saatleri: Cuma 13.00-15:45 2010/2011 Bahar yy. Çevre Müh. KT 1 KİTAPLAR Mühendislik
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 12 Parçacık Kinematiği
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 12 Parçacık Kinematiği
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
DİNAMİK - 1. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
MÜHENDİSLİK MEKANİĞİ (STATİK)
") MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Prof.Dr. Mehmet Zor DEU Muh.Fak. Makine Muh. Bölümü
 Prof.Dr. Mehmet Zor DEU Muh.Fak. Makine Muh. Bölümü Ders Kitabı : Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik,
Prof.Dr. Mehmet Zor DEU Muh.Fak. Makine Muh. Bölümü Ders Kitabı : Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik,
Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ
 Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Akışkanlar Mekaniği Bölüm 6 AKIŞ SİSTEMLERİNİN MOMENTUM ANALİZİ Doç. Dr. İ. Gökhan AKSOY Denizanasının (Aurelia aurita) düzenli yüzme hareketi. Denizanası gövdesini kasıp akışkanı ittikten sonra süzülerek
Hareket Kanunları. Newton un Hareket Kanunları. Fiz 1011 Ders 5. Eylemsizlik - Newton un I. Yasası. Temel - Newton un II. Yasası
 Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
DENEY 5 DÖNME HAREKETİ
 DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017
 Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017") SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
DİNAMİK - 2. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu. Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
Bir cismin iki konumu arasındaki vektörel uzaklıktır. Başka bir ifadeyle son konum (x 2 ) ile ilk konum
 ile ilk konum") DOĞRUSAL ve BAĞIL HAREKET Hareket Maddelerin zamanla yer değiştirmesine hareket denir. Fakat cisimlerin nereye göre yer değiştirdiği ve nereye göre hareket ettiği belirtilmelidir. Örneğin at üstünde giden
DOĞRUSAL ve BAĞIL HAREKET Hareket Maddelerin zamanla yer değiştirmesine hareket denir. Fakat cisimlerin nereye göre yer değiştirdiği ve nereye göre hareket ettiği belirtilmelidir. Örneğin at üstünde giden
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Düzgün olmayan dairesel hareket
 Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Fizik-1 UYGULAMA-7. Katı bir cismin sabit bir eksen etrafında dönmesi
 Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
GÜZ YARIYILI FİZİK 1 DERSİ
 2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) 1 Bölüm 3 İKİ BOYUTTA HAREKET 2 İçerik Yerdeğistirme,
2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) 1 Bölüm 3 İKİ BOYUTTA HAREKET 2 İçerik Yerdeğistirme,
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
Bölüm 9: Doğrusal momentum ve çarpışmalar
 Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
KATI CİSMİN DÜZLEMSEL KİNETİĞİ
 KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50
 YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50 Toplam 100 1 Mukavemet ve Statiğin Önemi 2 Statiğin
YARIYIL İÇİ ÇALIŞMALARI SIRA KATKI YÜZDESİ Ara Sınav 1 60 Kısa Sınav 2 30 Ödev 1 10 Toplam 100 Finalin Başarıya Oranı 50 Yıliçinin Başarıya Oranı 50 Toplam 100 1 Mukavemet ve Statiğin Önemi 2 Statiğin
DİNAMİK DERS NOTLARI. Doç.Dr. Cesim ATAŞ
 DİNMİK DERS NOTLRI Kaynaklar: Engineering Mechanics: Dynamics,, SI Version, 6th Edition, J. L. Meriam,, L. G. Kraige Vector Mechanics for Engineers: : Dynamics, Sith Edition, Beer and Johnston Doç.Dr.
DİNMİK DERS NOTLRI Kaynaklar: Engineering Mechanics: Dynamics,, SI Version, 6th Edition, J. L. Meriam,, L. G. Kraige Vector Mechanics for Engineers: : Dynamics, Sith Edition, Beer and Johnston Doç.Dr.
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
2. Konum. Bir cismin başlangıç kabul edilen sabit bir noktaya olan uzaklığına konum denir.
 HAREKET Bir cismin zamanla çevresindeki diğer cisimlere göre yer değiştirmesine hareket denir. Hareket konumuzu daha iyi anlamamız için öğrenmemiz gereken diğer kavramlar: 1. Yörünge 2. Konum 3. Yer değiştirme
HAREKET Bir cismin zamanla çevresindeki diğer cisimlere göre yer değiştirmesine hareket denir. Hareket konumuzu daha iyi anlamamız için öğrenmemiz gereken diğer kavramlar: 1. Yörünge 2. Konum 3. Yer değiştirme
Dinamik. Fatih ALİBEYOĞLU -8-
 1 Dinamik Fatih ALİBEYOĞLU -8- Giriş 2 Önceki bölümlerde F=m.a nın maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini kullandık. Hız değişimlerinin yapılan
1 Dinamik Fatih ALİBEYOĞLU -8- Giriş 2 Önceki bölümlerde F=m.a nın maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini kullandık. Hız değişimlerinin yapılan
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Bağıl hız ve bağıl ivme..
 Bağıl hız ve bağıl ivme.. Bağıl hareket, farklı referans sistemlerindeki farklı gözlemciler tarafından hareketlerin nasıl gözlemlendiğini ifade eder. Aynı hızla giden iki otomobilden birisinde bulunan
Bağıl hız ve bağıl ivme.. Bağıl hareket, farklı referans sistemlerindeki farklı gözlemciler tarafından hareketlerin nasıl gözlemlendiğini ifade eder. Aynı hızla giden iki otomobilden birisinde bulunan
DİNAMİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
PROF.DR. MURAT DEMİR AYDIN. ***Bu ders notları bir sonraki slaytta verilen kaynak kitaplardan alıntılar yapılarak hazırlanmıştır.
 PO.D. MUAT DEMİ AYDIN ***Bu ders notları bir sonraki slatta verilen kanak kitaplardan alıntılar apılarak hazırlanmıştır. Mühendisler için Vektör Mekaniği: STATİK.P. Beer, E.. Johnston Çeviri Editörü: Ömer
PO.D. MUAT DEMİ AYDIN ***Bu ders notları bir sonraki slatta verilen kanak kitaplardan alıntılar apılarak hazırlanmıştır. Mühendisler için Vektör Mekaniği: STATİK.P. Beer, E.. Johnston Çeviri Editörü: Ömer
DENEY 1. İncelenmesi. Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi
 DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU
 RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
STATIK MUKAVEMET. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
FIZ Uygulama Vektörler
 Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
elde ederiz. Bu son ifade yeniden düzenlenirse,
 Deney No : M2 Deneyin Adı : İKİ BOYUTTA ESNEK ÇARPIŞMA Deneyin Amacı : İki boyutta esnek çarpışmada, enerji ve momentum korunum bağıntılarını incelemek, momentumun vektörel, enerjini skaler bir büyüklük
Deney No : M2 Deneyin Adı : İKİ BOYUTTA ESNEK ÇARPIŞMA Deneyin Amacı : İki boyutta esnek çarpışmada, enerji ve momentum korunum bağıntılarını incelemek, momentumun vektörel, enerjini skaler bir büyüklük
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 8 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 14 Kasım 1999 Saat: 18.20 Problem 8.1 Bir sonraki hareket bir odağının merkezinde gezegenin
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 8 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 14 Kasım 1999 Saat: 18.20 Problem 8.1 Bir sonraki hareket bir odağının merkezinde gezegenin
Fizik 101: Ders 4 Ajanda
 Fizik 101: Ders 4 Ajanda Tekrar ve devam: Düzgün Dairesel Hareket Newton un hareket yasaları Cisimler neden ve nasıl hareket ederler? Düzgün Dairesel Hareket Ne demektir? Nasıl tanımlarız? Düzgün Dairesel
Fizik 101: Ders 4 Ajanda Tekrar ve devam: Düzgün Dairesel Hareket Newton un hareket yasaları Cisimler neden ve nasıl hareket ederler? Düzgün Dairesel Hareket Ne demektir? Nasıl tanımlarız? Düzgün Dairesel
TEMEL MEKANİK 4. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
TEMEL MEKANİK 6. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar: