5.13. SONDAJ MAKİNESİ PROJESİ
|
|
|
- Mehmed Cevahir
- 8 yıl önce
- İzleme sayısı:
Transkript
1 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir. Gelişen teknolojiye paralel olarak, otomasyon günlük yaşantımızın bir parçası haline gelmektedir. Akla gelebilecek bir çok yerde otomasyonun değişik uygulamalarını görmek mümkündür. Siz okuyucularımıza her ay değişik bir robot projesi tanıtmaktayız. Tanıttığımız bu projelerin en.önemli özelliği, özgün tasarım neticesi ortaya çıkmalarıdır. ''Robotik'' köşesinde tanıtılan bu projelerin tümünün benzetimi yapılmaktadır. Montajda kullanılan parçalar, mini yapıda olup, farklı tasarımlara elverişli esnek yapıya sahiptir. Bu çalışmanın amacı, sondaj işlemleri için bir otomatik makinenin nasıl tasarlanabileceği hakkında bilgi sunmaktır. 1613

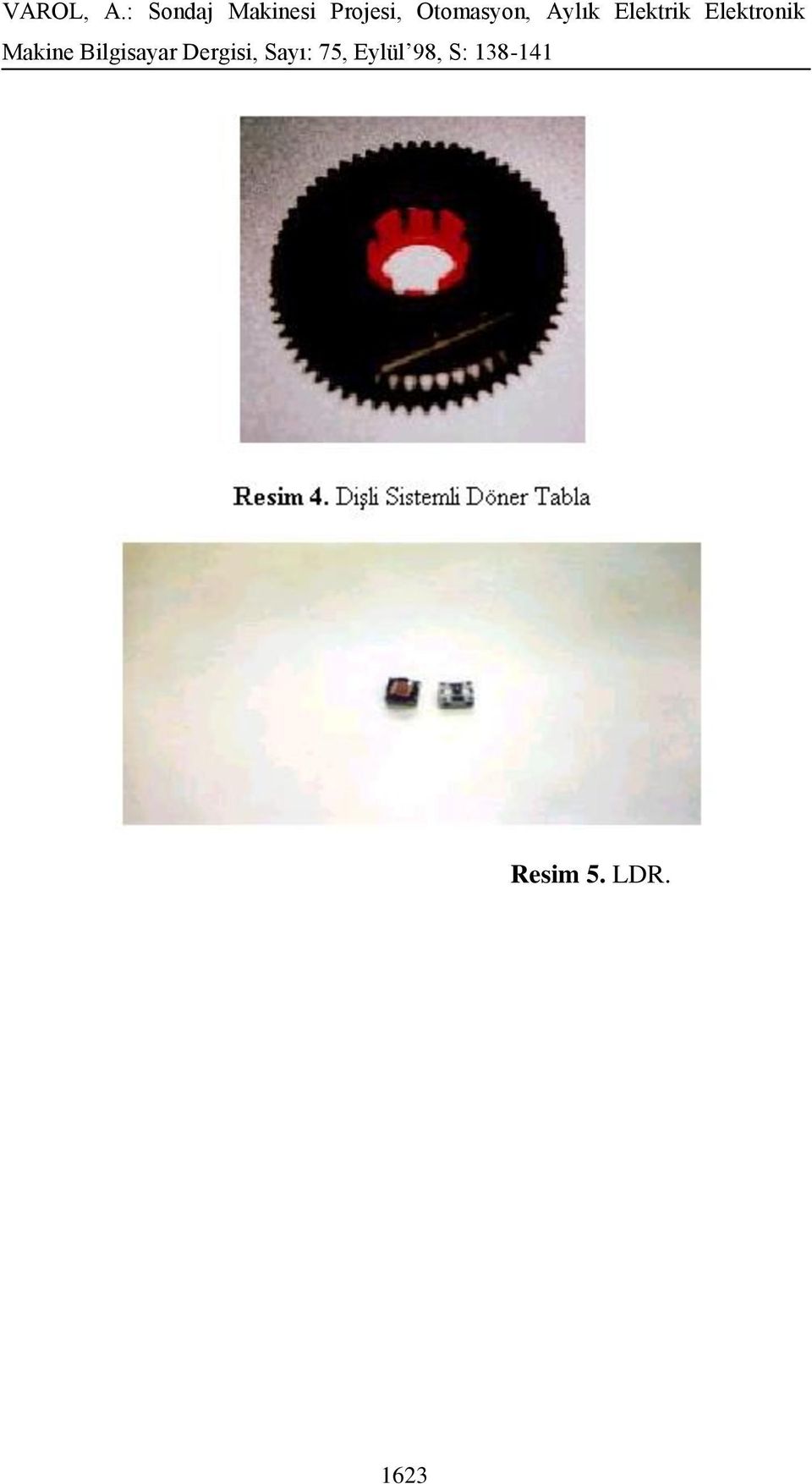
2 2. PROJEDE KULLANILAN MALZEMELER ve FONKSİYONLARI Resim 1. Sondaj Makinesinin Genel Görünümü 2.1 Döner Tabla ve Fonksiyonu Robotumuzun iskeleti döner tabla üzerinde bulunmaktadır. Bunun amacı kendi çevresinde 360 derece dönmesini sağlamaktır. Robotumuzun yaptığı en önemli işlemlerden birisi suyun bulunduğu alanı tespit etmesidir. Döner tabla, 9V'luk bir motor, bir tane mil ve yine bir tane helezon dişli ile kontrol edilmektedir. 2.2 Fotosel ve Fonksiyonu Robotta iki tane fotosel kullanılmıştır. Bu fotosellerin amacı: a) Suyun bulunduğu alanı tespit etmek, b) Kazı işlemi esnasında suyu bulmak. 1614

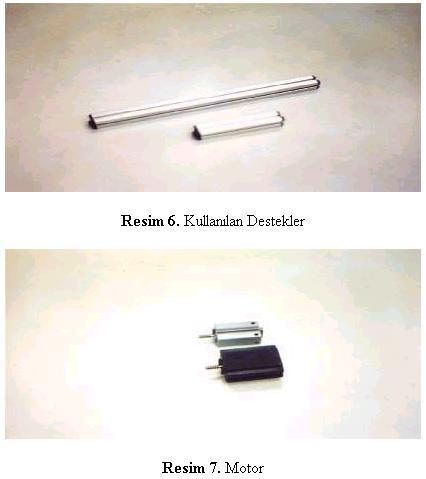
3 2.3 Mil, Helezon Dişlisi ve Fonksiyonları Robotta kullanılan ilk mil ve helezon dişlisi, parçanın 360 derece dönmesini sağlamaktadır. Diğerlerini ise kazı işlemi esnasında aşağı yukarı gitmelerde ve kazma sırasında kullanmıştır. 3. ROBOTUN GENEL ŞEMASI Robot montajına ait şematik çizim aşağıda verilmiştir. Sistemde 3 ayrı motor kullanılmıştır. Robotu kendi çevresinde M1 motoru döndürmektedir. Dönme işlemi döner tablo ile sağlanmaktadır. Bu döner tablonun üzerinde dişli sistemi bulunmakta ve döner tablo M1 motoru ile tahrik edilmektedir. M2 motoru milin aşağı-yukarı hareket ettirilmesi amacıyla kullanılmıştır. M3 motoru ise, milin ucuna takılı helezon dişlisini çalıştırmaktadır. Robotun Genel Şeması 1615

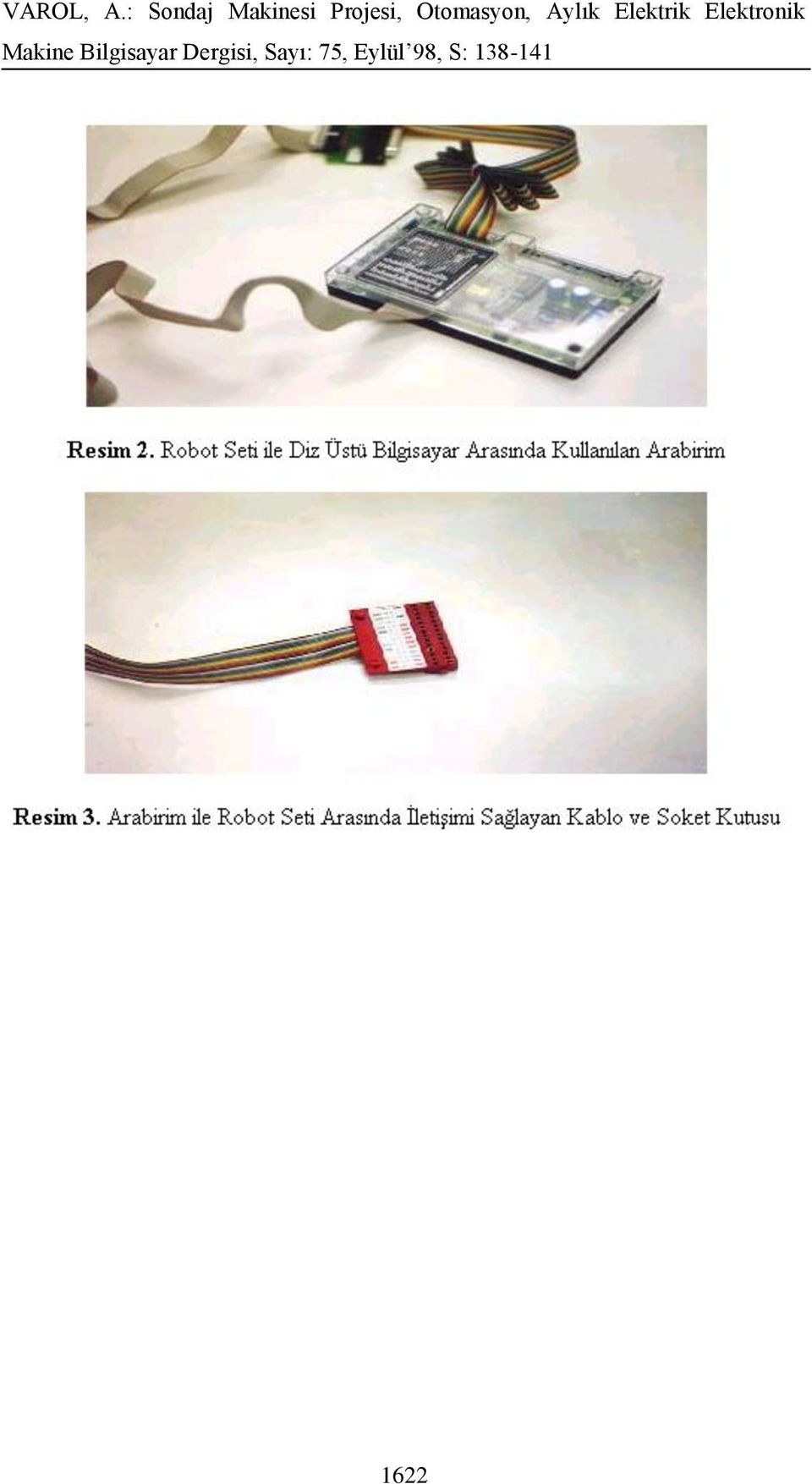
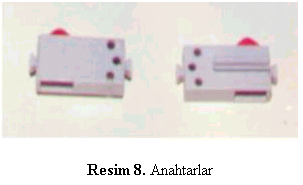
4 4. MOTORLAR ve GÖREVLERİ M1: Robotu kendi çevresinde döndürür. M2: Millerin aşağı-yukarı hareket etmesini sağlar. M3: Helezonik dişlinin hareketini gerçekleştirir. ALGILAYICILAR ve GÖREVLERİ E6: Suyun bulunduğu alanı tespit etme. E8: Kazı anında suyun bulunması. ANAHTARLAR ve GÖREVLERİ E5: Düşey düzlemde millerin başlangıç konumu. E7: Kazma işlemini yapacak dişlinin harekete başlaması. 5. OTOMATİK SONDAJ MAKİNESİ İÇİN KULLANILAN PROGRAM Bu robot setini hareket ettirmek için LOGO programlama dili kullanılmıştır. Program, bir arabirimden geçirilerek robot setine iletilmekte ve robot tamamen programla kontrol edilmektedir. Program aşağıda verilmiştir. TO BAŞLA MSTOP M2 MSTOP M3 1616

5 MCCW M1 ARA END TO ARA IF EQUALP STATUS ''E8 1 [YERBUL] IF EQUALP STATUS ''E8 O [ARA] END TO YERBUL MSTOP ''M1 MCCW M2 WATCH E7 MCCW M3 SUBUL END TO SUBUL IF EQUALP STATUS ''E6 1 [DUR] IF EQUALP STATUS ''E6 O [SUBUL] END 1617

6 TO DUR MSTOP M1 MSTOP M2 MSTOP M3 GER END TO GER MCW M2 WATCH ''E5 MCCW M2 END 6. PROGRAMIN AÇIKLAMASI Programın ana ve alt grupları ayrı ayrı açıklanacaktır: BAŞLA Ana Programının Açıklaması Öncelikle güvenlik için M2 ve M3 motorlarını MSTOP komutu ile durdurulmaktadır. MCCW komutu ile M1 motorunun saat yönünün tersinde döndürmesine başlanılmaktadır. ARA yazarak, ARA alt programına dallanmasını sağlanmaktadır. Robotun dönme amacı, suyun bulunduğu alanın tespit edilmesidir. 1618

7 6.2 ARA Alt Programının Açıklaması Suyun bulunduğu alan bir fotoselle sembolize edilmiştir. Fotosel, yani E8, ışığı gördüğü anda (1 durumuna geçtiğinde), YERBUL alt dizinine dallanacaktır. Işığı görmediği sürece, 0 durumunda, ARA alt dizininde kalacaktır. 6.3 YERBUL Alt Programının Açıklaması Suyun bulunduğu alan tespit edildiğinde MSTOP komutu ile M1 motoru durdurulur ve MCCW komutu ile M2 motoru aşağıya doğru harekete başlar. WATCH komutu ile E7 anahtarının durumuna bakılır. E7 anahtarının durumu değiştiği anda MCCW komutu ile M3 motoru harekete başlar. Daha sonra SUBUL alt programına dallanır. 6.4.SUBUL Alt Programının Açıklaması Suyun bulunması işlemi E6 isimli fotosel ile gerçekleştirilmiştir. E6 fotoseli ışığı gördüğünde (1 durumuna geldiğinde), DUR alt programına dallanır. Aksi durumda, 0 konumunda, SUBUL alt programı içerisinde ışığı görene kadar kalacaktır. 6.5 DUR Alt Programının Açıklaması Işığı algıladıktan sonra bütün motorlar MSTOP komutu ile durdurulur ve GER alt programına dallanır. 6.6 GER Alt Programının Açıklaması MCW komutu ile M2 motoru yukarı doğru harekete başlar. WATCH komutu ile E5 anahtarının durumuna bakılır. Anahtarın durumu değiştiği anda M2 motoru kısa bir süre MCCW komutu ile aşağıya doğru indirir ve M2 motorunun çalışması durdurulur. 1619

8 7. SİSTEMİN ÇALIŞMASI Projede robotun su çıkarılmak istenen alanda olduğu kabul edilmektedir. Program ilk olarak BAŞLA ana programıyla başlar. Başlangıçta M2 ve M3 motorları durdurulmaktadır. Bunun nedeni motorlar program başladığı anda bir önceki programdan kalan durumlarına göre davranırlar. Motorların bir önceki programdan çalışır vaziyette kalabileceği düşünülürse, yazılan bu komut satırının önemi kendiliğinden ortaya çıkar. Robot, suyun bulunduğu alanı bulmak için kendi etrafında dönmelidir. Bu da M1 motorunu çalıştırarak sağlanmaktadır. Daha sonra ARA isimli alt programa dallanılmaktadır. ARA alt programında E8 ile adlandırılan fotoselin durumuna bakılır. Bu fotoselin amacı suyun bulunduğu alanı tespit etmektir.suyun bulunması, ışık ile sembolize edilmektedir. Şayet fotosel ışığı görürse (suyu bulursa), YERBUL alt programına dallanacak, ışığı göremediği takdirde (suyu bulmadığı sürece) kendi içerisinde dönecektir. Robotun suyun bulunduğu alanı saptadıktan sonra yapılması gereken iş, M1 motorunun durdurulmasıdır. Motor durduktan sonra, M2 motoru harekete başlayacak, yani miller aşağıya doğru inmeye başlayacaktır. Miller E7 anahtarını gördükleri anda M3 motoru harekete geçer. Yani kazma işlemini gerçekleştirecek olan helezon dişli dönmeye başlayacaktır. Aslında E7 anahtarını kullanmayabilirdi. Böylece M2 motoru harekete geçtiğinde M3 motoru da çalışacaktı. Fakat biliniyor ki, motorların belirli bir güç sarfiyatı vardır. Bundan tasarruf edebilmek için dişli ile toprak arasında belirli bir mesafe kaldıktan sonra, dişli dönmeye başlamaktadır. Program daha sonra SUBUL alt programına dallanmaktadır. 1620

9 SUBUL alt programında E6 fotoselinin durumuna bakılır. Toprak altında suyun bulunması da ışıkla sağlanmıştır. Yani LDR; ışığı, gördüğü anda (suyu bulduğunda), DUR alt programına dallanacaktır. Aksi takdirde kendi içinde dönmesine devam edecektir. DUR alt programında bütün motorlar, ister çalışsın ister çalışmasın, durdurulmakta ve GER alt programa dallanması istenmektedir. Sondaj işleminde toprak altında su bulunduktan sonra bütün motorlar durur ve içeride bulunan miller ve kazıcı aletler dışarı çıkarılır ki, kuyunun içerisine içi boş borular yerleştirilebilsin. Bu durum göz önüne alınarak öncelikle M2 motoru hareket ettirilmektedir. Yani miller yukarı doğru çıkmaya başlamaktadır. Buraya ikinci bir anahtar koyulmuştur. Robotun blok şemasına bakılırsa, miller yukarı doğru hareket ederken bir süre sonra gelip M2 motoruna çarpacak ve yukarı çıkamadığı için motor zorlanacaktır. Miller yukarı hareket ederken, E5 anahtarını gördüğünde duracak ve anahtarın konumunu eski haline dönmesini sağlamak için de biraz aşağı inecektir. Bu işlemi yaptıktan sonra robot işlemlerini tamamlamış olacaktır. 8. KULLANILAN MALZEMELER Robot montajında kullanılan parçalara ait resimler ve bu parçalarla ilgili açıklamalar, resim altlarında verilmiştir. 1621

10 1622
11 Resim 5. LDR. 1623
12 1624

13 9. ROBOTUN YAPIM BASAMAKLARI Malzemelerin montajı için aşağıdaki işlem basamakları takip edilmiştir.robotun kendi ekseni etrafında dönmesini sağlayan destek üzerine robot ayakları monte edileceği için, destek parçalarının döner tablaya tutturulması ile işe başlanır. Hazırlanan bu döner tabla sisteminin asıl montaj tablası üzerine monte edilmesi gerekmektedir.bu amaçla robot montaj seti içerisinde yer alan ve üzerine montaj için delikler bulunan bir tabla kullanılmaktadır. Suyun bulunduğu alan E6 ile simgelenmektedir. Burada E6 fotoseldir. Robotun kendi etrafında dönmesini sağlamak için motordan aldığı hareketi döner tablaya ileten bir sisteme ihtiyaç bulunmaktadır. KAYNAKLAR [1] Otomatik Sondaj Makinesi Projesi, F.Ü. Teknik Eğitim Fakültesi, Elektronik-Bilgisayar Eğitimi Bölümü, Robotik Dersi, Proje no: 1998/

14 1626

5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
Varol, A.: Otomatik Pres Makinası, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 74, Ağustos 98, S: 98-101
 5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU
 5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ
 5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ
 5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ
 5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.40. SPREY DOLDURMA OTOMASYONU
 5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ
 5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ
 5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.1. OTOBAN GEÇİŞ SİSTEMİ
 5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU
 5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.17. ARICILIK BENZETİM PROJESİ
 5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU
 5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ
 5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU
 5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.41. UYDU ANTENİ YÖNLENDİRME OTOMASYON PROJESİ
 5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU. Engin AVCI enginavci@firat.edu.tr
 5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU
 5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ
 5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU
 5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU
 5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ
 5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU
 TEZGAHI OTOMASYONU") 5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.48. KALİTE KONTROL OTOMASYONU
 5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU
 5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ
 5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.36. FINDIK SAVURMA OTOMASYONU
 5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU
 5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.33. OTOMATİK PARÇA DELME OTOMASYONU
 5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.28. UÇAKSAVAR PROJESİ
 5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.51. SERAMİK PAKETLEME OTOMASYONU
 5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.9. OTOMATİK MEYVE SOYMA VE DİLİMLEME MAKİNASI
 5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI
 5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.15. VİNÇ BENZETİM PROJESİ
 5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
VAROL, A.: Koli İstifleme Otomasyonu, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 107, Mayıs 2001, S: 114-119
 5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI
 5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS
 4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU. Abdulkadir ġengür
 5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU
 5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU
 5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU
 5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.46. EBAT KONTROL OTOMASYONU
 5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU
 5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU
 5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.43. CAM TUĞLA BOYAMA OTOMASYONU
 5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU
 5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI
 5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU
 5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
Varol, A., Şengür, A., Avcı, E.: Atık Toplayan Araç Otomasyonu, Otomasyon, Sayı 154, 2005(03), Mart 2005.
, Mart 2005.") 2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür ksengur@firat.edu.tr
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.3. ROBOTLAR VE ISI KONTROLÜ
 5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa 2 Nolu Proje
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU
 5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
ZİNCİR DİŞLİ ÇARKLAR. Öğr. Gör. Korcan FIRAT CBÜ Akhisar MYO
 ZİNCİR DİŞLİ ÇARKLAR Öğr. Gör. Korcan FIRAT CBÜ Akhisar MYO ZİNCİR DİŞLİ ÇARK NEDİR? Tanımı: Güç ve hareket iletecek millerin merkez uzaklığının fazla olduğu durumlarda, aradaki bağlantıyı dişli çarklarla
ZİNCİR DİŞLİ ÇARKLAR Öğr. Gör. Korcan FIRAT CBÜ Akhisar MYO ZİNCİR DİŞLİ ÇARK NEDİR? Tanımı: Güç ve hareket iletecek millerin merkez uzaklığının fazla olduğu durumlarda, aradaki bağlantıyı dişli çarklarla
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi):
:") KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
MAK-204. Üretim Yöntemleri. (8.Hafta) Kubilay Aslantaş
 Kubilay Aslantaş") MAK-204 Üretim Yöntemleri Vidalar-Vida Açma Đşlemi (8.Hafta) Kubilay Aslantaş Kullanım yerlerine göre vida Türleri Bağlama vidaları Hareket vidaları Kuvvet ileten vidaları Metrik vidalar Trapez vidalar
MAK-204 Üretim Yöntemleri Vidalar-Vida Açma Đşlemi (8.Hafta) Kubilay Aslantaş Kullanım yerlerine göre vida Türleri Bağlama vidaları Hareket vidaları Kuvvet ileten vidaları Metrik vidalar Trapez vidalar
MEKATRONİĞİN TEMELLERİ BASİT MAKİNALAR
 MEKATRONİĞİN TEMELLERİ BASİT MAKİNALAR Basit Makine Kuvvetin yönünü ve büyüklüğünü değiştiren araçlara basit makine denir. Ayrıca basit makineler, küçük bir kuvvetle büyük kuvvetleri yenmek ya da dengelemek
MEKATRONİĞİN TEMELLERİ BASİT MAKİNALAR Basit Makine Kuvvetin yönünü ve büyüklüğünü değiştiren araçlara basit makine denir. Ayrıca basit makineler, küçük bir kuvvetle büyük kuvvetleri yenmek ya da dengelemek
Temel Bilgisayar Programlama
 Temel Bilgisayar Programlama C Programlamaya Giriş Dr. Tahir Emre Kalaycı 2012 Dr. Tahir Emre Kalaycı () Temel Bilgisayar Programlama 2012 1 / 16 İçerik 1 Geçtiğimiz hafta 2 Yapısal Program Geliştirme
Temel Bilgisayar Programlama C Programlamaya Giriş Dr. Tahir Emre Kalaycı 2012 Dr. Tahir Emre Kalaycı () Temel Bilgisayar Programlama 2012 1 / 16 İçerik 1 Geçtiğimiz hafta 2 Yapısal Program Geliştirme
 GÜNEŞİ TAKİP EDEN HAREKETLİ KOLLEKTÖR MÜNİR ATAMAN BTSO Kamil Tolon Bilim Ve Sanat Merkezi Osmangazi-BURSA munirataman@hotmail.com ŞENOL YILDIZ Ekinciler 75. Yıl İlköğretim Okulu-Göynük BOLU senolyildiz5@hotmail.com
GÜNEŞİ TAKİP EDEN HAREKETLİ KOLLEKTÖR MÜNİR ATAMAN BTSO Kamil Tolon Bilim Ve Sanat Merkezi Osmangazi-BURSA munirataman@hotmail.com ŞENOL YILDIZ Ekinciler 75. Yıl İlköğretim Okulu-Göynük BOLU senolyildiz5@hotmail.com
Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi.
 ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak
ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak
Triger kayışı değişimi montaj tavsiyeleri Audi A4, A6, A8 ve VW Passat modellerindeki 2,8 l 30 V motor tipi için ayrıntılı montaj bilgileri
 Technical Info www contitech de Triger kayışı değişimi montaj tavsiyeleri Audi A4, A6, A8 ve VW Passat modellerindeki 2,8 l 30 V motor tipi için ayrıntılı montaj bilgileri 2,8 l 30 V motor tipi, Audi ve
Technical Info www contitech de Triger kayışı değişimi montaj tavsiyeleri Audi A4, A6, A8 ve VW Passat modellerindeki 2,8 l 30 V motor tipi için ayrıntılı montaj bilgileri 2,8 l 30 V motor tipi, Audi ve
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı: Işığı Takip Eden Kafa
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı: Işığı Takip Eden Kafa Proje No: 2 Proje Raporu Mehmet Emin Sonverdi 11068030
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı: Işığı Takip Eden Kafa Proje No: 2 Proje Raporu Mehmet Emin Sonverdi 11068030
Mak- 204. Üretim Yöntemleri - II. Vargel ve Planya Tezgahı. Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt.
 Mak- 204 Üretim Yöntemleri - II Talaşlı Đmalatta Takım Tezgahları Vargel ve Planya Tezgahı Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt. Bölümü Takım Tezgahlarında Yapısal
Mak- 204 Üretim Yöntemleri - II Talaşlı Đmalatta Takım Tezgahları Vargel ve Planya Tezgahı Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt. Bölümü Takım Tezgahlarında Yapısal
HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ. Öğr. Gör. RECEP KÖKÇAN. Tel: +90 312 267 30 20
 HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ Tel: +90 312 267 30 20 E-mail_2: rkokcan@gmail.com KONTROL ÜNİTESİ ELEMANLARI EDIT MODU: Program yazmak, düzenlemek
HACETTEPE ÜNİVERSİTESİ HACETTEPE ASO 1.OSB MESLEK YÜKSEKOKULU HMK 211 CNC TORNA TEKNOLOJİSİ Tel: +90 312 267 30 20 E-mail_2: rkokcan@gmail.com KONTROL ÜNİTESİ ELEMANLARI EDIT MODU: Program yazmak, düzenlemek
MAK-204. Üretim Yöntemleri
 MAK-204 Üretim Yöntemleri Taşlama ve Taşlama Tezgahı (12.Hafta) Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt. Bölümü Taşlama Đşleminin Tanımı: Belirli bir formda imal
MAK-204 Üretim Yöntemleri Taşlama ve Taşlama Tezgahı (12.Hafta) Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt. Bölümü Taşlama Đşleminin Tanımı: Belirli bir formda imal
KULLANIM KILAVUZU Kuvvet Test Standı PCE-MTS500
 KULLANIM KILAVUZU Kuvvet Test Standı PCE-MTS500 İçindekiler 1 Fonksiyon... 3 2 Yapı... 3 3 Kuvvet Ölçer Kurulumu... 4 4 Özellikler... 4 5 Uyarı... 4 6 İşlem... 5 7 Bakım... 5 8 Paket Listesi... 5 2 1 Fonksiyon
KULLANIM KILAVUZU Kuvvet Test Standı PCE-MTS500 İçindekiler 1 Fonksiyon... 3 2 Yapı... 3 3 Kuvvet Ölçer Kurulumu... 4 4 Özellikler... 4 5 Uyarı... 4 6 İşlem... 5 7 Bakım... 5 8 Paket Listesi... 5 2 1 Fonksiyon
SIEMENS LOGO KULLANIMI VE UYGULAMALAR
 SIEMENS LOGO KULLANIMI VE UYGULAMALAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 SIEMENS S7 200 UYGULAMALARI UYGULAMA _1 3 Fazlı Asenkron motorun iki yönde
SIEMENS LOGO KULLANIMI VE UYGULAMALAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 SIEMENS S7 200 UYGULAMALARI UYGULAMA _1 3 Fazlı Asenkron motorun iki yönde
ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER. -Örnek Giriş Şeması- SON = 01 (SERVO ON)
") ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER -Örnek Giriş Şeması- SON = 01 (SERVO ON) Servo sürücünün dijital girişlerinden (P2-10 P2-15) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ASDA-B SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER -Örnek Giriş Şeması- SON = 01 (SERVO ON) Servo sürücünün dijital girişlerinden (P2-10 P2-15) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
METAL İŞLEME TEKNOLOJİSİ. Doç. Dr. Adnan AKKURT
 METAL İŞLEME TEKNOLOJİSİ Doç. Dr. Adnan AKKURT Takım Tezgahları İnsan gücü ile çalışan ilk tezgahlardan günümüz modern imalat sektörüne kadar geçen süre zarfında takım tezgahları oldukça büyük bir değişim
METAL İŞLEME TEKNOLOJİSİ Doç. Dr. Adnan AKKURT Takım Tezgahları İnsan gücü ile çalışan ilk tezgahlardan günümüz modern imalat sektörüne kadar geçen süre zarfında takım tezgahları oldukça büyük bir değişim
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU. Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ
 4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:avarol@firat.edu.tr 2 e posta:ferhatb@firat.edu.tr
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:avarol@firat.edu.tr 2 e posta:ferhatb@firat.edu.tr
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
Kısmi dönüşlü aktüatörler SQ 05.2 SQ 14.2/SQR 05.2 SQR 14.2 SQEx 05.2 SQEx 14.2/SQREx 05.2 SQREx 14.2 ayak ve kollu
 Kısmi dönüşlü aktüatörler SQ 05.2 SQ 14.2/SQR 05.2 SQR 14.2 SQEx 05.2 SQEx 14.2/SQREx 05.2 SQREx 14.2 ayak ve kollu Sadece kullanma kılavuzuyla bağlantılı olarak kullanın! Bu kısa talimat, kullanma kılavuzu
Kısmi dönüşlü aktüatörler SQ 05.2 SQ 14.2/SQR 05.2 SQR 14.2 SQEx 05.2 SQEx 14.2/SQREx 05.2 SQREx 14.2 ayak ve kollu Sadece kullanma kılavuzuyla bağlantılı olarak kullanın! Bu kısa talimat, kullanma kılavuzu
Sanayi kapıları için otomasyon sistemleri
 Sanayi kapıları için otomasyon sistemleri Sanayi kapıları için otomasyonlar DITEC in geniş bir yelpazede yer alan ürünleri ve tahrik grupları, mevcut ve yeni giriş veya erişim sistemlerinin gerekli sanayi
Sanayi kapıları için otomasyon sistemleri Sanayi kapıları için otomasyonlar DITEC in geniş bir yelpazede yer alan ürünleri ve tahrik grupları, mevcut ve yeni giriş veya erişim sistemlerinin gerekli sanayi
Profesyonel, verimli, yenilikçi sistemler...
 ARKE Otomasyon Bil. Mak. San. ve Tic. Ltd. Şti. Atilla KARAÇAY Ramazan EKİN Proje & Yazılım 0.533 430 19 45 Üretim & Satış 0.533 223 13 46 atilla.karacay@arkeotomasyon.com ramazan.ekin@arkeotomasyon.com
ARKE Otomasyon Bil. Mak. San. ve Tic. Ltd. Şti. Atilla KARAÇAY Ramazan EKİN Proje & Yazılım 0.533 430 19 45 Üretim & Satış 0.533 223 13 46 atilla.karacay@arkeotomasyon.com ramazan.ekin@arkeotomasyon.com
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
Chapter 24: Frezeleme. DeGarmo s Materials and Processes in Manufacturing
 Chapter 24: Frezeleme DeGarmo s Materials and Processes in Manufacturing 24.1 Giriş Frezeleme, düz bir yüzey elde etmek için yapılan temel bir talaş kaldırma işlemidir Freze bıçakları bir veya birden fazla
Chapter 24: Frezeleme DeGarmo s Materials and Processes in Manufacturing 24.1 Giriş Frezeleme, düz bir yüzey elde etmek için yapılan temel bir talaş kaldırma işlemidir Freze bıçakları bir veya birden fazla
ROBOT OTOMASYONU SAKARYA ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU. Doç.Dr. Akın Oğuz KAPTI
 ROBOT OTOMASYONU MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU Doç.Dr. Akın Oğuz KAPTI Endüstriyel Robotlar 2 Robotlar, sensörel bilgi ile çevresini algılayan, algıladıklarını yorumlayan, yapay
ROBOT OTOMASYONU MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU Doç.Dr. Akın Oğuz KAPTI Endüstriyel Robotlar 2 Robotlar, sensörel bilgi ile çevresini algılayan, algıladıklarını yorumlayan, yapay
SolidWorks Macro, SolidWorks API. Yusuf MANSUROĞLU Mühendislik Hizmetleri Müdür Yardımcısı
 SolidWorks Macro, SolidWorks API Yusuf MANSUROĞLU Mühendislik Hizmetleri Müdür Yardımcısı 06.08.2014 SolidWorks Macro, SolidWorks API SolidWorks Makro Makro Kaydetme Kayıtlı Makro Çalıştırma Kayıtlı Makro
SolidWorks Macro, SolidWorks API Yusuf MANSUROĞLU Mühendislik Hizmetleri Müdür Yardımcısı 06.08.2014 SolidWorks Macro, SolidWorks API SolidWorks Makro Makro Kaydetme Kayıtlı Makro Çalıştırma Kayıtlı Makro
MAK-204. Üretim Yöntemleri. Frezeleme Đşlemleri. (11.Hafta) Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt.
 Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt.") MAK-204 Üretim Yöntemleri Freze Tezgahı Frezeleme Đşlemleri (11.Hafta) Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt. Bölümü Freze tezgahının Tanımı: Frezeleme işleminde
MAK-204 Üretim Yöntemleri Freze Tezgahı Frezeleme Đşlemleri (11.Hafta) Kubilay ASLANTAŞ Afyon Kocatepe Üniversitesi Teknik Eğitim Fakültesi Makine Eğt. Bölümü Freze tezgahının Tanımı: Frezeleme işleminde
AKE ELEKTRİKLİ DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU
 KULLANIM KILAVUZU") AKE.370.502.01.01 ELEKTRİKLİ DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU AKE.370.502.01.01 ELEKTRİKLİ DÖNER TABANLI FIRIN KONTROL KARTI KULLANIM KILAVUZU 1 1.CİHAZ ÖLÇÜLERİ 2.RÖLE
AKE.370.502.01.01 ELEKTRİKLİ DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU AKE.370.502.01.01 ELEKTRİKLİ DÖNER TABANLI FIRIN KONTROL KARTI KULLANIM KILAVUZU 1 1.CİHAZ ÖLÇÜLERİ 2.RÖLE
CNC KOORDİNAT ÖLÇÜM CİHAZLARI
 CNC KOORDİNAT ÖLÇÜM CİHAZLARI ÖZEL TALEPLER KOORDİNAT ÖLÇÜM CİHAZLARI PRE1341 CNC Koordinat Ölçüm Cihazları Özel Talepler Büyük silindirik iş parçalarının oldukça etkin ölçümü için büyük döner tabla dahil
CNC KOORDİNAT ÖLÇÜM CİHAZLARI ÖZEL TALEPLER KOORDİNAT ÖLÇÜM CİHAZLARI PRE1341 CNC Koordinat Ölçüm Cihazları Özel Talepler Büyük silindirik iş parçalarının oldukça etkin ölçümü için büyük döner tabla dahil
PERDE TAKMA MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF CURTAIN ATTACHMENT MACHINE. Danışman: Prof.Dr. Koray TUNÇALP
 PERDE TAKMA MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF CURTAIN ATTACHMENT MACHINE Danışman: Prof.Dr. Koray TUNÇALP Mustafa Ercan SAYILGAN, Marmara Üniversitesi-Mekatronik Öğrt. 4. Sınıf Đstanbul Özgür GÖÇEN,
PERDE TAKMA MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF CURTAIN ATTACHMENT MACHINE Danışman: Prof.Dr. Koray TUNÇALP Mustafa Ercan SAYILGAN, Marmara Üniversitesi-Mekatronik Öğrt. 4. Sınıf Đstanbul Özgür GÖÇEN,
ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME
 ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME Şekil - 1 Şekilde üç fazlı asenkron motora buton ve kontaktörle yol veren devre görülmektedir. Devrede start butonuna basıldığında K 1 kontaktörünün
ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME Şekil - 1 Şekilde üç fazlı asenkron motora buton ve kontaktörle yol veren devre görülmektedir. Devrede start butonuna basıldığında K 1 kontaktörünün
UYGULAMA 1 24V START CPU V LO. Verilen PLC bağlantısına göre; START butonuna basıldığında Q0.0 çıkışını aktif yapan PLC programını yazınız.
 UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
BÜTÜNLEŞİK İMALAT SİSTEMLERİ
 BÜTÜNLEŞİK İMALAT SİSTEMLERİ Doç.Dr. Semih ÖNÜT İçerik Bütünleşik imalat sistemlerine giriş Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi
BÜTÜNLEŞİK İMALAT SİSTEMLERİ Doç.Dr. Semih ÖNÜT İçerik Bütünleşik imalat sistemlerine giriş Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi
DENEY NO : 3. DENEY ADI : CNC Torna ve Freze Tezgâhı
 DENEY NO : 3 DENEY ADI : CNC Torna ve Freze Tezgâhı AMAÇ : NC tezgahların temel sistematiği, NC tezgahların çalışma ilkeleri ve özellikleri, programlama işlemi hakkında bilgilendirme yaptıktan sonra, BOXFORD
DENEY NO : 3 DENEY ADI : CNC Torna ve Freze Tezgâhı AMAÇ : NC tezgahların temel sistematiği, NC tezgahların çalışma ilkeleri ve özellikleri, programlama işlemi hakkında bilgilendirme yaptıktan sonra, BOXFORD
5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ
 5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ VAROL, A.: Otoban GeçiĢ Sistemi, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 65, Kasım 97, S: 38-41 5.1. OTOBAN GEÇĠġ SĠSTEMĠ
5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ VAROL, A.: Otoban GeçiĢ Sistemi, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 65, Kasım 97, S: 38-41 5.1. OTOBAN GEÇĠġ SĠSTEMĠ
EXISTS VE NOT EXISTS fonksiyonları
 EXISTS VE NOT EXISTS fonksiyonları Kullanımı EXISTS (sorgu) : eğer sorgudan bir yada daha fazla kayıt dönerse değeri true (doğru), hiç kayıt dönmez ise değeri false (yanlış) tır. NOT EXISTS : exists fonksiyonunun
EXISTS VE NOT EXISTS fonksiyonları Kullanımı EXISTS (sorgu) : eğer sorgudan bir yada daha fazla kayıt dönerse değeri true (doğru), hiç kayıt dönmez ise değeri false (yanlış) tır. NOT EXISTS : exists fonksiyonunun
-Örnek Giriş Şeması-
 ASDA-A SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER SON = 01 (SERVO ON) -Örnek Giriş Şeması- Servo sürücünün dijital girişlerinden (P2-10 P2-17) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ASDA-A SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER SON = 01 (SERVO ON) -Örnek Giriş Şeması- Servo sürücünün dijital girişlerinden (P2-10 P2-17) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
Şekil 4.12 : Klasik kumanda devresi. Ladder devresi : Network1. Network 2. Network 3 I0.0
 4.8 - Örnek problemler : Örnek 1 : Bir sistemde, 2 adet motor çalıştırılacaktır. Start butonuna ilk defa basıldığında sadece 1 nolu motor devreye girecek ve sürekli çalışacaktır. 1. motor çalışmaya başladıktan
4.8 - Örnek problemler : Örnek 1 : Bir sistemde, 2 adet motor çalıştırılacaktır. Start butonuna ilk defa basıldığında sadece 1 nolu motor devreye girecek ve sürekli çalışacaktır. 1. motor çalışmaya başladıktan
TORK VE DENGE. İçindekiler TORK VE DENGE 01 TORK VE DENGE 02 TORK VE DENGE 03 TORK VE DENGE 04. Torkun Tanımı ve Yönü
 İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
Speed dome kameralarda Otomatik fonksiyonları kullanabilmek için; Kameranın protokol bilgisi önemlidir. KONTROL KOMUTLARI
 Speed dome kameralarda Otomatik fonksiyonları kullanabilmek için; Kameranın protokol bilgisi önemlidir. Speed Dome Kamerayı D-MAX protokolünde kullanıyorsanız. 3.PRESET İŞLEMLERİ KONTROL KOMUTLARI A. Preset
Speed dome kameralarda Otomatik fonksiyonları kullanabilmek için; Kameranın protokol bilgisi önemlidir. Speed Dome Kamerayı D-MAX protokolünde kullanıyorsanız. 3.PRESET İŞLEMLERİ KONTROL KOMUTLARI A. Preset