Servus Latince kökenli,
|
|
|
- Ayşe Taner
- 8 yıl önce
- İzleme sayısı:
Transkript
1 Servus Latince kökenli, köle anlamına gelmektedir. Servo Mekanizma istenilen gösterge değerlerine göre hareket eden bir kontrol mekanizmasıdır. yüksek kararlılıkta çalışabilmek için çalışma şartlarını kendi kendine kontrol eden bir mekanizmaya sahiptir.

2 Servo motor, iç yapısında bir potansiyometre veya encoder ve motor milinin (şaft) konumunu ölçen bir kontrol devresi bulunur. Ayrıca servo motor 3 bağlantı ucuna sahiptir. bunlardan ikisi motoru çalıştırırken diğer ucu ise sistemin giriş birimine motor şaftının konumunu bildirir. Servo motor sürücü devresi, kodlanmış sinyalleri motor mekanizmasına göndererek motorun şaftına açısal pozisyonda döndürme kabiliyeti kazandıran elektronik bir amplifikatör türüdür.

3 -90 derece ve +90 derece arasında hareket eder DC servo motorlar, -90 derece ve +90 derece arasında olmak üzere 180 derecelik bir açıda hareket edebilme kapasitesine sahiptir. DC servo motorun, çıkış dişlisinin mili mekanik olarak kısıtlaması sebebiyle daha büyük bir açı ile hareket ettirilemez. Motora yazılımsal olarak dönme miktarı ise PWM modülü ile belirlenir. PWM modülü, kare dalgalardan oluşur. Kare dalga 1 konumunda iken motora güç gider. 0 konumuna geldiğinde ise motora güç gitmez. Servo motorlarda açısal hareketin gerçekleşmesi için bir kare dalga 20 mili saniyeden oluşan palse şeklinde gönderilmesi gerekir aksi taktirde çalışmaz.

4 Servo Motorlar kontrol edilebilirlik mantığına göre üretilmişlerdir. Servo Motorlar yapısal olarak Adım Motorlarla, DA Motorlarının yapısal özelliklerini andırır. Adım motorun adımlama yöntemini DA motorununda döndürme yöntemini çağrıştırır. Ancak sargıları çok daha geliştirilmiş ve hassas konumlandırılmıştır.

5 Servo motorlar Servo, herhangi bir mekanizmanın işleyişini hatayı algılayarak bir geri besleme düzeneğinin yardımıyla denetleyen ve hatayı gideren otomatik aygıttır. Robot teknolojisinde en çok kullanılan motor çeşididir. Bu sistemler mekanik olabileceği gibi elektronik, hidrolikpnömatik veya başka alanlarda da kullanılabilmektedir. Servo motorlarda mekaniksel konum, hız veya ivme gibi parametreler kontrol edilir. Servo motor içerisinde herhangi bir motor AC, DC veya Step motor bulunur. Sürücü ve kontrol devresini de içerisinde barındırır.

6

7 Stator, makinenin duran kısmıdır. Stator saclar ve sargılardan oluşur. Saclar, asenkron veya senkron motorlarda olduğu gibi birer yüzeyi silisli olup üzerlerine stator oyukları açılır. Biçimlendirilen stator sacları sıkıştırılarak perçinlenir veya somunla sabitlenir. STATOR

8 Rotor Rotor demir-nikel-kobalt yani ferro manyetik yani mıknatıslanabilir malzemeden yapılır. Motorun uyartım akısı rotora yerleştirilen kalıcı mıknatıslar tarafından sağlanmaktadır. Kalıcı mıknatıs malzemelerin kalıcı yüksek mıknatısiyete sahip olmasını sağlar.

9 Gövde makinenin bütün esas elemanlarını içerisinde barındırır. Yatak gövdeler kapalı veya havalandırmalı olabilir. Yatak gövde makine ısısını kolaylıkla iletecek, rotor yataklarına destek verecek yük ve bağlantılarına uygun olacak özellikte (alüminyum gibi) olmalıdır. Yatak Gövde

10 3 Fazlı asenkron motor son yıllarda yüksek-güç sistem uygulamalarında üç-faz asenkron motorun servo motor olarak kullanımı üzerine yapılan araştırmalar başarıya ulaşmış ve 3 Fazlı asenkron motor yüksekgüç uygulamalarında hızlı bir şekilde yerini almaya başlamıştır. Son yirmi yıldaki çalışmalar, 3 Fazlı asenkron motorun yabancı uyartımlı DA motoru gibi kontrol edileceğini göstermiştir.

11

12 Servo Motorların Kullanıldığı Yerler Servo motor birkaç Watt an birkaç yüz Watt a kadar olabilir. Bu motorlar daha küçük çaplı ve daha uzundur. Servo motor normal olarak düşük veya sıfır hızda çalışır, bundan dolayı moment veya güç değerleri aynı olan klasik motorlara göre boyutları daha büyüktür. Hassas devir sayısı ayarı yapılabilir, ayrıca devir sayıcı gerekmez. Servo motorların kullanım alanı çok geniştir. Servo motorlar robotlar, radarlar, nümerik kontrollü makinelerde (CNC), yüksek hızlı çip yerleştiricilerinde, tıbbi cihazlarda, anten sürücüleri vb. yerlerde kullanılır.
, yüksek hızlı çip yerleştiricilerinde, tıbbi cihazlarda, anten sürücüleri")
13 Servo motor etiket değerleri Akım: Burada akım ile kastedilen servo motorun bir yüke maksimum tork uyguladığında çektiği akımdır. DC motorlarda olduğu gibi bu akım değeri yüke göre değişir. Genellikle servo motorların maksimum akım aralığı 100 ma ile 2 A arasıdır. Kararlılık: Kararlılık, bir komut sinyali algılandığında servo motorun şaftının pozisyonunun istenilen açıya göre kesinliğidir. Genellikle servo motorların kararlılık aralığı 1 ile 10 arasındadır.

14 Standart servo motorların 3 kablosu vardır. Bunlardan biri power (4 V ile 6 V arasında), biri toprak, diğeri ise kontrol girişi içindir. Kabloların renkleri ise genellikle power için kırmızı, toprak için siyah ve kontrol için beyazdır. Servo motorların boyutları ve şekilleri planlanan uygulamaya bağlıdır. Yandaki resimdeki servo motor ve benzerleri robotikte sık kullanılan servo motor tipleridir. Bunlar düşük güçte çalışabilir,

15 Opamp ve sinyal karşılaştırması Bir DC motor yüksek redüksiyon oranına sahip bir dişli kutusunu hareket ettirir. Sondaki şaft daha yavaş dönerek dönme ekseni üzerindeki potansiyometreyi de çevirir. Potansiyometre geri besleme yaparak servo motorun pozisyon algılanmasını sağlar. Potansiyometre algılanan pozisyona karşılık gelen voltajı, voltaj karşılaştırıcısı olarak kullanılan opampa gönderir. Bu voltaj değerinin, şaftın istenilen pozisyonunu belirleyen giriş voltajı ile karşılaştırılması ile karşılaştırıcının çıkış voltajı belirlenir.

16 Opamplı karşılaştırıcı devresi örneği
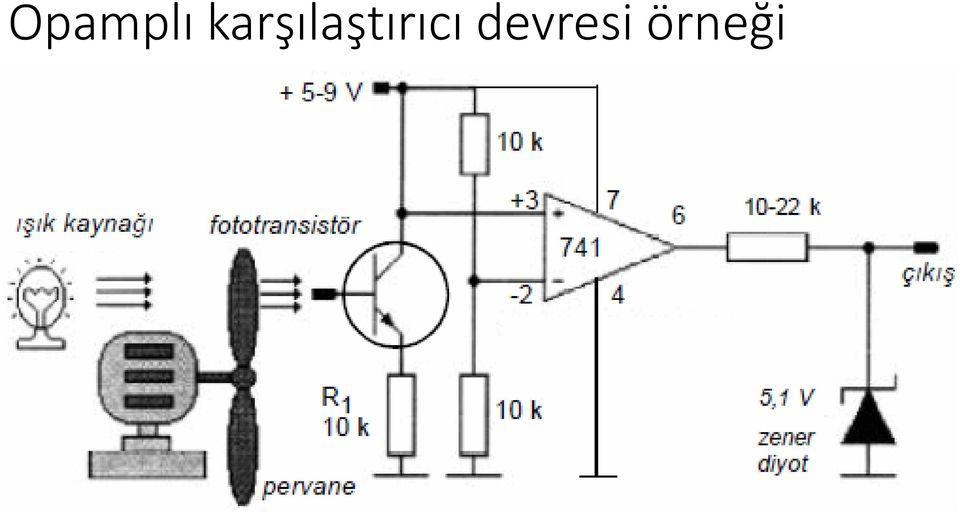
17 Opamplı karşılaştırıcı çalışma prensibi Devrede fototransistöre gelen ışık, bu elemanı iletim-kesim yaparak 10 kω luk R1 direncinde bir gerilim oluşmasına neden olur. R1 üzerinde oluşan gerilim kıyaslayıcı olarak çalışan op-amp tarafından karşılaştırılır. Op-ampın çıkışındaki gerilim zener diyot tarafından 5,1 V ta sabit tutulur. Pervanenin dönüş sayısı arttıkça op-ampın çıkışında oluşan kare dalganın frekansı da artar. Bu sinyal osilaskopta gözetlenir.

18 kodlanmış sinyal-kontrol Palsi: Bir servo motorun şaftının pozisyonunu kontrol etmenin bir diğer yolu kodlanmış sinyal kullanmaktır. Bu metot uzaktan kumandalı uygulamalarda sıklıkla kullanılır. Servonun kontrol girişine 18 ms periyotlu palslardan oluşan bir sinyal gönderilir. Palsın süresi servo motorun şaftının pozisyonunu belirler. Eğer pals (pulse) 1 ms uzunlukta ise servo motor 90 sola, 2 ms uzunlukta ise 90 sağa hareket eder. Bazı servo motorların pals uzunluğu aralığı 1,25 ms ile 1,75 ms arasındadır. Bu durumda pals uzunluğu 1,5 ms iken servo motor şaftı ortadadır. Pals uzunluğu 1,25 ms iken 90 sola, 1,75 ms iken ise 90 sağa hareket eder.

19

20 1-2 ms Servo Motorların Pals Sürelerine Göre Açıları 1,25-1,75 ms Servo Motorların Pals Sürelerine Göre Açıları Süre (ms) Açı (derece) Süre (ms) Açı (derece) 1,0-90 1, ,1-72 1, ,2-54 1, , , ,3-36 1, ,4-18 1,50 0 1,5 0 1, ,6 18 1, ,7 36 1, , , ,8 54 1, ,9 72 2,0 90

21
22
23 Robot Kolları için en ideal Elektromekanik Sistem: Servo Motorlar
24 Soğutucu fan Eski tip motorlarda doğrudan motor şaftına bağlanmış bir motor fanı bulunur. Motor düşük hızda çalışırken fan, motoru soğutmak için yeterli havayı hareket ettiremez. Daha yeni motorlarda ayrı bir fan monte edilmiştir. Bu fan, ideal soğutucu havayı sağlar. Bu fan sabit bir gerilim kaynağıyla güçlendirilmiştir. Böylelikle servo motorun hızından bağımsız olarak her zaman döner.
25 Servo Motorlar ve Kontrolü Bir Servo Motor biri besleme ( +VCC ), diğeri toprak ( Ground ), diğeri de bilgi girişi ( Data In, SGN ) olmak üzere üç adet giriş ( Input ) birimi içerir. Bu besleme ve toprak girişleri kaynağa bağlanırken, Bilgi girişi bir çeşit Zamanlayıcı Dalga Üretim birimine bağlanır. Kare Dalga üreten dalga üreteci, Motora belirli zaman aralıklarında Darbe ( PULSE ) üretirler. Bu darbelerin sıklığına göre Motor hızlı çalışırken, geniş periyotlu darbelerde yavaş çalışırlar.
26 R/C Servo Motor R/C Servo Motor dediğimiz şey dc akımla çalışan ve istenilen açı aralığında dönen motorlardır. R/C, Radio Controlled anlamına gelir. Servo motorlar DC Motorların temel mantığını kullanırlar. Fakat buna karşın elektronik pozisyon kontrol devresi ve elektronik şaft gibi ekstra bileşenleri vardır. Servo motor şaftın kaç derece ve hangi hızda döndüğünü algılar ve girişe bunu geri besleme olarak verir. Motorun pozisyonunu algılamak için rotora takılı bir potansiyometre bulunur. Bu potansiyometreden gelen analog değer ile inputtaki sinyal karşılaştırılır ve output olarak motorun yeni pozisyonu kontrol edilir.
27 R/C Servo Motor R/C servo motorun pozisyonunu kontrol etmek için PWM sinyali kullanılır. Motorun inputuna gelen PWM sinyalinin görev çevrimine(duty cycle) göre motor, pozisyon değiştirir. R/C Servo Motorlarda pozisyon açısal derece esasına göre kontrol edilir. Pozisyon kontrol devresi PWM sinyalinin görev çevrimine göre döneceği dereceyi hesaplar. PWM sinyalinin çevrim süresi aynı kaldığı müddetçe motor pozisyon değiştirmez. Yalnız önemli olan nokta şudur ki; servo motorda dönmenin gerçekleşebilmesi için PWM siyalinin frekansı 50 Hz olmalıdır. Yani kontrol sinyalinin periodu 20 ms olmalıdır. -
28 Servo motorun 555 ile sürülmesi Motorun darbe üretici birimi Nano Saniye ( saniyenin milyarda biri) mertebelerinde çalışabilirler. Bu da çok hassas bir konum ve hız kontrolü demektir. Örnek olarak aşağıdaki devrede Kare Dalga Üreteci 555 kullanılmıştır. Burada P1 ile gösterilen Ayarlı Direnç ( Potansiyometre ) üretilen darbelerin sık ya da seyrek olmasını sağlamaktadır.
29 Servo motorun 555 ile sürülmesi R5 10k R1 220R 8 U1 R4 BAT1 6V 73% RV1 10k 4 5 R CV VCC Q DC k Q1 BD TR GND TH 6 A R3 15k B C C2 100nF C1 100nF D

30 Potansiyometre üretilen darbelerin sık ya da seyrek olmasını sağlar
31 R4(1) 5VDC R5 33k 8 U1 R4 47k R1 68k R2 10k R CV TR GND VCC Q DC TH R3 1k Q1 BC C1 100nF

32 enkoderler
33
34 ENCODERLER (ŞAFT POZİSYON ALGILAYICI) Encoderler robot ve otomasyon projelerinde açısal dönme hızını ve düzeneğin açısal pozisyonunu belirlemek amacıyla kullanılır. Encoder diskinin üzerinde belirli aralıkla delikler vardır. Encoder diski dönerken IR LEDin yaydığı ışık deliklerden geçer ve karşı taraftaki fototransistörü tetikler.
35 ENCODERLER Delik olmayan kısımlarda ise IR ışık fototransistörü tetikleyemez. Bu şekilde alınan sinyaller sayılabilir ve mikrodenetleyiciye gönderilebilir. Mikrodenetleyicide yazılı program ile sinyaller işlenerek gerekli işlemlerin gerçekleştirilmesi sağlanır.
36 Alan Etkili Sensör (Hall effect sensör)
37 Alan Etkili Sensör (Hall effect sensör) Alan etkili sensörler, manyetik alanın varlığını algılar. Herhangi bir manyetik alan olmadığı durumda bir potansiyel fark yoktur. Hall gerilimi 30 mv değerinde bir gerilim olduğundan bir yükselteç ile yükseltilmelidir. Bazı Hall sensörler tek çıkışlı olarak imal edilirken bazı sensörler iki çıkışlı yapılır. Tek çıkışlı Hall sensörü motor dönerken N kutbundan S kutbuna geçişi algıladığında sinyal verir. Diğeri S kutbundan N kutbuna geçişinde de sinyal verir.
38 Hall etkisi Hall etkisi switch: Hall sensörü ön yüzüne mıknatısın S kutbunun veya arka yüzüne mıknatısın N kutbunun yaklaşmasıyla birlikte ON konumuna gelecektir. Mıknatıs ortamdan uzaklaştığında ise OFF konumuna gelecektir. Hall etkisi latch anahtarı: Hall etkisi anahtar (latch) devresinde sensör bir kez ON olduktan sonra, mıknatıs ortamdan uzaklaştırılsa dahi ON konumunda kalmaya devam edecektir. Mıknatısın ters kutbu yaklaştırıldığında OFF konumuna geçecektir.
39 Tako generator
40 takogeneratör Genelde 10 V/ 1000 rpm gibi değer yazar. Bu şu demektir 1000 devirle dönen mile bağlı takojeneratör 10 V üretir. Yada devir başına 0,01 V eder. Takogeneratör voltajın polaritesi değişeceğinden ilerimi yoksa gerimi döndüğünü de gösterir. Elektrik motorlarının hız ölçümlerinde, Dönen makine parçalarının hız ölçümlerinde kullanılır. Yani;üretilen voltaj yerine rpm devir taksimatı yapılır.
41 N kanal mosfet çıkışı Mosfet çıkışı ile mikrodenetleyici çıkışı aynı fazlıdır. Mosfet kapı girişine lojik-1 seviyeli sinyal geldiğinde mosfet iletime geçer. Mosfet sayesinde servo motor kendisi için gereken akımı gerilim kaynağından çeker.
42 Servo motorun değişik açılarda döndürülmesi RA0/AN0 2 RA1/AN1 3 RA2/AN2/VREF-/CVREF 4 RA4/T0CKI/C1OUT 6 RA5/AN4/SS/C2OUT 7 RE0/AN5/RD 8 RE1/AN6/WR 9 RE2/AN7/CS 10 OSC1/CLKIN 13 OSC2/CLKOUT 14 RC1/T1OSI/CCP2 16 RC2/CCP1 17 RC3/SCK/SCL 18 RD0/PSP0 19 RD1/PSP1 20 RB7/PGD 40 RB6/PGC 39 RB5 38 RB4 37 RB3/PGM 36 RB2 35 RB1 34 RB0/INT 33 RD7/PSP7 30 RD6/PSP6 29 RD5/PSP5 28 RD4/PSP4 27 RD3/PSP3 22 RD2/PSP2 21 RC7/RX/DT 26 RC6/TX/CK 25 RC5/SDO 24 RC4/SDI/SDA 23 RA3/AN3/VREF+ 5 RC0/T1OSO/T1CKI 15 MCLR/Vpp/THV 1 U1 PIC16F877A B1 5V X1 CRYSTAL C1 22pF C2 22pF Q1 IRF640 R1 1k R2 3.3k R3 10k RESET 5VDC SERVO SERVO MOTOR KONTROLU
43 Servo motorun değişik açılarda döndürülmesi void main() { int i; portd=0x00; trisd=0x00; while(1) { //move CCW saat tersi for(i=1;i<=50;i++) { portd=(1<<rd7); //output high delay_us(1400); //-18 derece icin portd=(0<<rd7); //output low delay_ms(20); } //move CW saat yonu for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(1600); portd=(0<<rd7); //+18 derece donsun delay_ms(20); }
44 Servo motorun değişik açılarda döndürülmesi //move CCW saat yonu for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(1200); portd=(0<<rd7); //-54 der donsun delay_ms(20); } //move CW saat yonu for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(1800); portd=(0<<rd7); //+54 derece donsun delay_ms(20); } } }
45 Servonun ileri geri hareketi RA0/AN0 2 RA1/AN1 3 RA2/AN2/VREF-/CVREF 4 RA4/T0CKI/C1OUT 6 RA5/AN4/SS/C2OUT 7 RE0/AN5/RD 8 RE1/AN6/WR 9 RE2/AN7/CS 10 OSC1/CLKIN 13 OSC2/CLKOUT 14 RC1/T1OSI/CCP2 16 RC2/CCP1 17 RC3/SCK/SCL 18 RD0/PSP0 19 RD1/PSP1 20 RB7/PGD 40 RB6/PGC 39 RB5 38 RB4 37 RB3/PGM 36 RB2 35 RB1 34 RB0/INT 33 RD7/PSP7 30 RD6/PSP6 29 RD5/PSP5 28 RD4/PSP4 27 RD3/PSP3 22 RD2/PSP2 21 RC7/RX/DT 26 RC6/TX/CK 25 RC5/SDO 24 RC4/SDI/SDA 23 RA3/AN3/VREF+ 5 RC0/T1OSO/T1CKI 15 MCLR/Vpp/THV 1 U1 PIC16F877A B1 5V X1 CRYSTAL C1 22pF C2 22pF Q1 IRF640 R1 1k R2 3.3k R3 10k RESET 5VDC SERVO SERVO MOTOR KONTROLU
46 Servonun ileri geri hareketi void main() { int i; portd=0x00; trisd=0x00; while(1) { //move CCW saat tersi for(i=1;i<=50;i++) { portd=(1<<rd7); //output high delay_us(1000); //-90 derece icin portd=(0<<rd7); //output low delay_ms(20); } //move CW saat yonu for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(2000); portd=(0<<rd7); //+90 derece donsun delay_ms(20); } } }
47 Eğer servonun periyoduna dikkat edersek void main() { int i; portd=0x00; trisd=0; while(1) { //move CCW saat tersi for(i=1;i<=50;i++) { portd=(1<<rd7); //output high delay_us(1300); //-36 derece icin portd=(0<<rd7); //output low delay_us(18700); } //move CW saat yonu for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(1700); portd=(0<<rd7); //+36 derece donsun delay_us(18300); }
48 Eğer servonun periyoduna dikkat edersek //move CCW saat tersi yonunde - 18 derece for(i=1;i<=50;i++) { portd=(1<<rd7); //output high delay_us(1400); //-18 derece icin portd=(0<<rd7); //output low delay_us(18600); } //move CW saat yonu for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(1600); portd=(0<<rd7); //+18 derece donsun delay_us(18400); }
49 Eğer servonun periyoduna dikkat edersek //move CCW saat tersi yonunde -45 derece for(i=1;i<=50;i++) { portd=(1<<rd7); //output high delay_us(1250); //-45 derece icin portd=(0<<rd7); //output low delay_us(18750); } //move CW saat yonunde +45 derece donsun for(i=1;i<=50;i++) { portd=(1<<rd7); delay_us(1750); portd=(0<<rd7); //+45 derece donsun delay_us(18250); } } }
50 ENCODER KONTROLLÜ SERVO Endüstriyel servolarda motor miline bağlı encoder yada potansiyometre bulunmaktadır. Encoder li tiplerde referans noktası yada başlangıç noktasında encoder değeri sıfır alınarak dönüşlerde encoderden gelen palslar sayılarak uygun değerde motorun durdurulması veya dönen motorda uygun pozisyon yakalandıktan sonra durdurulması sağlanabilir. encoder den gelen A ve B girişleri kullanılır. Bu iki giriş bir birinden yarım faz farkı olan iki sinyal üretirler.
51 birbirinden yarım faz farkı olan iki sinyal
52 Yön tayini ilk okumanın (OLD) A biti ile son okumanın (NEW) B biti nin XOR yapılması ile bulunur. Yukarıdan aşağı doğru çizilen kesikli çizgiler encoderin okuma noktalarını gösterir. Bu noktalarda soldan sağa doğru gidişte (diyelimki motor sağ a dönüyor olsun) okunacak bilgi çiftleri şöyle olacaktır; Bu seferde motor sağdan sola yani sola dönerken aynı bilgilere bir göz atalım şeklinde olacaklardır. Yön tayini ilk okumanın (OLD) A biti ile son okumanın (NEW) B biti nin XOR yapılması ile bulunur.
53 yön biti daima aynı değeri alıyor bir yönde dönüşlerde ilgili bitler XOR yapılırsa yön biti daima aynı değeri alıyor. Sola dönüşte 0, sağa dönüşte ise 1 olmaktadır. (bu tersi de olabilir. ) Yani sola dönüşte yön biti 0,sağa dönüşte yön biti 1 olabilir.
54 XOR KAPISI 0 0 U1 XOR U2 XOR U3 XOR U4 XOR 0
55 Arabalarda kullanılan sileceklerin kontrolü hakkında İki adet PWM servo motor ve bir adet su püskürtme motoru kullanıldı. PIC 16F877A. 3 farklı buton ile silecekler üç farklı şekilde çalışacaktır. 1. butona basılınca silecekler sadece bir defa çalışıp duracak (+90 ileri ve-90 derece geri). 2. butona basılınca silecekler bu işlemi 3 kez tekrarlar ve bekler. 3. butona basılınca su püskürtme motoru çalışacak,silecek motorları 4 defa gidip gelecektir. Su motoru yerine röle de kullanılabilirdi.

56
57
Servo Motor. Servo Motorların Kullanıldığı Yerler
 Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
ÖZEL TASARIMLI MOTORLAR. Elektrik Motorları ve Sürücüleri
 ÖZEL TASARIMLI MOTORLAR Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu
ÖZEL TASARIMLI MOTORLAR Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu
T.C. RC SERVO MOTOR KONTROLÜ
 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin
Sensörler Yrd.Doç.Dr. İlker ÜNAL Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
Elektrik Motorları ve Sürücüleri
 Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 4 Motor Denetimi Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 4 Motor Denetimi Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik
Şekil1. Geri besleme eleman türleri
 HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
3 FAZLI ASENKRON MOTORLAR
 3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
Robot Bilimi. Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI. r1.0
 Öğr. Gör. M. Ozan AKI. r1.0") Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
WZM-2H090MK İki Faz Step Motor Sürücüsü
 WZM-2H090MK İki Faz Step Motor Sürücüsü Özet WZM-2H090MK iki faz step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı, çok güçlü
WZM-2H090MK İki Faz Step Motor Sürücüsü Özet WZM-2H090MK iki faz step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı, çok güçlü
ZM-2H606 İki Faz Step. Motor Sürücüsü. Özet
 ZM-2H606 İki Faz Step Motor Sürücüsü Özet ZM-2H606 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
ZM-2H606 İki Faz Step Motor Sürücüsü Özet ZM-2H606 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
ASENKRON MAKİNELER. Asenkron Motorlara Giriş
 ASENKRON MAKİNELER Asenkron Motorlara Giriş İndüksiyon motor yada asenkron motor (ASM), rotor için gerekli gücü komitatör yada bileziklerden ziyade elektromanyetik indüksiyon yoluyla aktaran AC motor tipidir.
ASENKRON MAKİNELER Asenkron Motorlara Giriş İndüksiyon motor yada asenkron motor (ASM), rotor için gerekli gücü komitatör yada bileziklerden ziyade elektromanyetik indüksiyon yoluyla aktaran AC motor tipidir.
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ROBOTECH-10 ARDUINO UYGULAMA KARTI. SENSÖR ve ROBOT TEKNOLOJİLERİ GELİŞTİRME KARTI
 ROBOTECH-10 ARDUINO UYGULAMA KARTI SENSÖR ve ROBOT TEKNOLOJİLERİ GELİŞTİRME KARTI 1. Genel Tanım Robotech-10 kartı, Teknik okullarda, üniversitelerde ve robot kulüpleri olan liseler ile bu işi hobi olarak
ROBOTECH-10 ARDUINO UYGULAMA KARTI SENSÖR ve ROBOT TEKNOLOJİLERİ GELİŞTİRME KARTI 1. Genel Tanım Robotech-10 kartı, Teknik okullarda, üniversitelerde ve robot kulüpleri olan liseler ile bu işi hobi olarak
MLS-310 MANYETİK LİNEER ENCODER SİSTEMİ
 MLS-310 MANYETİK LİNEER ENCODER SİSTEMİ KENDİNDEN YATAKLANMIŞ KAPALI ÖLÇÜM SİSTEMİ Manyetik Temassız Lineer Encoder Sistem 5 µm 'den 62,5 µm ' ye kadar Çözünürlük Değerleri 0,001-0,005-0,010-0,025-0,050
MLS-310 MANYETİK LİNEER ENCODER SİSTEMİ KENDİNDEN YATAKLANMIŞ KAPALI ÖLÇÜM SİSTEMİ Manyetik Temassız Lineer Encoder Sistem 5 µm 'den 62,5 µm ' ye kadar Çözünürlük Değerleri 0,001-0,005-0,010-0,025-0,050
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
ALTERNATİF AKIMIN TEMEL ESASLARI
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
ASENKRON (İNDÜKSİYON)
") ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
SÜLEYMAN DEMİREL ÜNİVERSİTESİ
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Elektronik ve Bilgisayar Eğitimi Bölümü Elektrik Makinaları Projenin Adı : DC Servo Motor Hazırlayanın : Adı : Alper Soyadı : KIZIL Numarası : 0011703006
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Elektronik ve Bilgisayar Eğitimi Bölümü Elektrik Makinaları Projenin Adı : DC Servo Motor Hazırlayanın : Adı : Alper Soyadı : KIZIL Numarası : 0011703006
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Multivibratörler. Monastable (Tek Kararlı) Multivibratör
 Multivibratör") Multivibratörler Kare dalga veya dikdörtgen dalga meydana getiren devrelere MULTİVİBRATÖR adı verilir. Bu devreler temel olarak pozitif geri beslemeli iki yükselteç devresinden oluşur. Genelde çalışma
Multivibratörler Kare dalga veya dikdörtgen dalga meydana getiren devrelere MULTİVİBRATÖR adı verilir. Bu devreler temel olarak pozitif geri beslemeli iki yükselteç devresinden oluşur. Genelde çalışma
2019
 Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
5. (10 Puan) Op-Amp devresine aşağıda gösterildiği gibi bir SİNÜS dalga formu uygulanmıştır. Op-Amp devresinin çıkış sinyal formunu çiziniz.
 Op-Amp devresine aşağıda gösterildiği gibi bir SİNÜS dalga formu uygulanmıştır. Op-Amp devresinin çıkış sinyal formunu çiziniz.") MAK442 MT3-MEKATRONİK S Ü L E Y M A N D E MİREL ÜNİVERSİTES E Sİ M Ü H E N DİSLİK-MİMM A R L I K F A K Ü L T E Sİ M A KİNA M Ü H E N DİSLİĞİ BÖLÜMÜ Ü ÖĞRENCİ ADI NO İMZA SORU/PUAN 1/15 2/15 3/10 4/10 5/10
MAK442 MT3-MEKATRONİK S Ü L E Y M A N D E MİREL ÜNİVERSİTES E Sİ M Ü H E N DİSLİK-MİMM A R L I K F A K Ü L T E Sİ M A KİNA M Ü H E N DİSLİĞİ BÖLÜMÜ Ü ÖĞRENCİ ADI NO İMZA SORU/PUAN 1/15 2/15 3/10 4/10 5/10
3. Bölüm: Asenkron Motorlar. Doç. Dr. Ersan KABALCI
 3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ EELP212 DERS 05
 EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI
 DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
Deney 3 5 Üç-Fazlı Tam Dalga Tam-Kontrollü Doğrultucu
 Deney 3 5 Üç-Fazlı Tam Dalga Tam-Kontrollü Doğrultucu DENEYİN AMACI 1. Üç-fazlı tam dalga tam-kontrollü doğrultucunun çalışma prensibini ve karakteristiklerini anlamak. 2. Üç-fazlı tam dalga tam-kontrollü
Deney 3 5 Üç-Fazlı Tam Dalga Tam-Kontrollü Doğrultucu DENEYİN AMACI 1. Üç-fazlı tam dalga tam-kontrollü doğrultucunun çalışma prensibini ve karakteristiklerini anlamak. 2. Üç-fazlı tam dalga tam-kontrollü
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
DENEY 21 IC Zamanlayıcı Devre
 DENEY 21 IC Zamanlayıcı Devre DENEYİN AMACI 1. IC zamanlayıcı NE555 in çalışmasını öğrenmek. 2. 555 multivibratörlerinin çalışma ve yapılarını öğrenmek. 3. IC zamanlayıcı anahtar devresi yapmak. GİRİŞ
DENEY 21 IC Zamanlayıcı Devre DENEYİN AMACI 1. IC zamanlayıcı NE555 in çalışmasını öğrenmek. 2. 555 multivibratörlerinin çalışma ve yapılarını öğrenmek. 3. IC zamanlayıcı anahtar devresi yapmak. GİRİŞ
Elektrik. Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları
 Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu
 Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu 1. Adım : Motor & Sürücü Bağlantılarını Yapınız. 2. Adım : Motor Plaka Değerlerine Bakınız Mentor II nin parametrelerini ayarlamak için, önce motor
Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu 1. Adım : Motor & Sürücü Bağlantılarını Yapınız. 2. Adım : Motor Plaka Değerlerine Bakınız Mentor II nin parametrelerini ayarlamak için, önce motor
Elektromekanik Kumanda Sistemleri / Ders Notları
 İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı
 Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
SERVOMOTOR HIZ VE POZİSYON KONTROLÜ
 SERVOMOTOR HIZ VE POZİSYON KONTROLÜ Deneye Hazırlık: Deneye gelmeden önce DC servo motor çalışması ve kontrolü ile ilgili bilgi toplayınız. 1.1.Giriş 1. KAPALI ÇEVRİM HIZ KONTROLÜ DC motorlar çok fazla
SERVOMOTOR HIZ VE POZİSYON KONTROLÜ Deneye Hazırlık: Deneye gelmeden önce DC servo motor çalışması ve kontrolü ile ilgili bilgi toplayınız. 1.1.Giriş 1. KAPALI ÇEVRİM HIZ KONTROLÜ DC motorlar çok fazla
5.Eğitim E205. PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628:
 5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA
 A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA İÇİNDEKİLER Sayaçlar Elektrik Sayaçları ELEKTRİK SAYAÇLARI Elektrik alıcılarının gücünü ölçen aygıt wattmetre, elektrik alıcılarının yaptığı
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA İÇİNDEKİLER Sayaçlar Elektrik Sayaçları ELEKTRİK SAYAÇLARI Elektrik alıcılarının gücünü ölçen aygıt wattmetre, elektrik alıcılarının yaptığı
Analog Sayısal Dönüşüm
 Analog Sayısal Dönüşüm Gerilim sinyali formundaki analog bir veriyi, iki tabanındaki sayısal bir veriye dönüştürmek için, az önce anlatılan merdiven devresiyle, bir sayıcı (counter) ve bir karşılaştırıcı
Analog Sayısal Dönüşüm Gerilim sinyali formundaki analog bir veriyi, iki tabanındaki sayısal bir veriye dönüştürmek için, az önce anlatılan merdiven devresiyle, bir sayıcı (counter) ve bir karşılaştırıcı
326 ELEKTRİK MAKİNALARI LABORATUVARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 326-04
 MOTOR DENEY 326-04") İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa 2 Nolu Proje
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
ZM-2H504 İki Faz Step. Motor Sürücüsü. Özet
 ZM-2H504 İki Faz Step Motor Sürücüsü Özet ZM-2H504 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
ZM-2H504 İki Faz Step Motor Sürücüsü Özet ZM-2H504 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
Bobin Gövdesi. Flanşı Tork Ayar Vidası. Balata. Dişli. Montaj Vidası
 Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
EEM 311 KONTROL LABORATUARI
 Dicle Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü EEM 311 KONTROL LABORATUARI DENEY 04: KAPALIÇEVRİMLİ KONTROL ve GERİBESLEME POLARİTESİ 2012-2013 GÜZ DÖNEMİ Grup Kodu: Deney
Dicle Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü EEM 311 KONTROL LABORATUARI DENEY 04: KAPALIÇEVRİMLİ KONTROL ve GERİBESLEME POLARİTESİ 2012-2013 GÜZ DÖNEMİ Grup Kodu: Deney
Elektrik Makinaları I SENKRON MAKİNALAR
 Elektrik Makinaları I SENKRON MAKİNALAR Dönen Elektrik Makinaları nın önemli bir grubunu oluştururlar. (Üretilen en büyük güç ve gövde büyüklüğüne sahip dönen makinalardır) Generatör (Alternatör) olarak
Elektrik Makinaları I SENKRON MAKİNALAR Dönen Elektrik Makinaları nın önemli bir grubunu oluştururlar. (Üretilen en büyük güç ve gövde büyüklüğüne sahip dönen makinalardır) Generatör (Alternatör) olarak
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
ELEKTRİK MOTORLARI VE SÜRÜCÜLER ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ
 BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ
 1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
Alternatif Akım Devre Analizi
 Alternatif Akım Devre Analizi Öğr.Gör. Emre ÖZER Alternatif Akımın Tanımı Zamaniçerisindeyönüveşiddeti belli bir düzen içerisinde (periyodik) değişen akıma alternatif akımdenir. En bilinen alternatif akım
Alternatif Akım Devre Analizi Öğr.Gör. Emre ÖZER Alternatif Akımın Tanımı Zamaniçerisindeyönüveşiddeti belli bir düzen içerisinde (periyodik) değişen akıma alternatif akımdenir. En bilinen alternatif akım
UYGULAMA 1 24V START CPU V LO. Verilen PLC bağlantısına göre; START butonuna basıldığında Q0.0 çıkışını aktif yapan PLC programını yazınız.
 UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
ABSOLUTE ROTARY ENCODER
 ABSOLUTE ROTARY ENCODER Multi-Turn Absolute Encoder, Magnetic Measurement, Shaft and Semi Hollow Shaft -58 Analog Signal Output MAGNETIC PRINCIPLE MEASUREMENT ABSOLUTE MEASUREMENT SHAFT OR SEMI HOLLOW
ABSOLUTE ROTARY ENCODER Multi-Turn Absolute Encoder, Magnetic Measurement, Shaft and Semi Hollow Shaft -58 Analog Signal Output MAGNETIC PRINCIPLE MEASUREMENT ABSOLUTE MEASUREMENT SHAFT OR SEMI HOLLOW
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
GEPA. RFD-121 Arıza Gösterge Düzeneği. Kullanma Kılavuzu. Orta Gerilim Yer Altı Şebekeleri İçin Arıza Akımı Gösterge Düzeneği.
 GEPA RFD-121 Arıza Gösterge Düzeneği Orta Gerilim Yer Altı Şebekeleri İçin Arıza Akımı Gösterge Düzeneği Kullanma Kılavuzu www.gepaelk.com İçindekiler 1. Genel... 1 2. Özellikler... 1 3. Bağlantı ve Montaj...
GEPA RFD-121 Arıza Gösterge Düzeneği Orta Gerilim Yer Altı Şebekeleri İçin Arıza Akımı Gösterge Düzeneği Kullanma Kılavuzu www.gepaelk.com İçindekiler 1. Genel... 1 2. Özellikler... 1 3. Bağlantı ve Montaj...
3. ELEKTRİK MOTORLARI
 3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ
 BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
BAŞKENT ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAK 402 MAKİNE MÜHENDİSLİĞİ LABORATUVARI DENEY 11 ELEKTRİK MOTOR TORKUNUN BELİRLENMESİ TEORİK BİLGİ: BAŞKENT ÜNİVERSİTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAK
DENEY-4 ASENKRON MOTORUN KISA DEVRE (KİLİTLİ ROTOR) DENEYİ
 DENEYİ") DENEY-4 ASENKRON MOTORUN KISA DEVRE (KİLİTLİ ROTOR) DENEYİ TEORİK BİLGİ ASENKRON MOTORLARDA KAYIPLAR Asenkron motordaki güç kayıplarını elektrik ve mekanik olarak iki kısımda incelemek mümkündür. Elektrik
DENEY-4 ASENKRON MOTORUN KISA DEVRE (KİLİTLİ ROTOR) DENEYİ TEORİK BİLGİ ASENKRON MOTORLARDA KAYIPLAR Asenkron motordaki güç kayıplarını elektrik ve mekanik olarak iki kısımda incelemek mümkündür. Elektrik
ZM-2H2080 İki Faz Step. Motor Sürücüsü. Özet
 ZM-2H2080 İki Faz Step Motor Sürücüsü Özet ZM-2H2080 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
ZM-2H2080 İki Faz Step Motor Sürücüsü Özet ZM-2H2080 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
2- Tristör ile yük akımı değiştirilerek ayarlı yükkontrolü yapılabilir.
 Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
9. Güç ve Enerji Ölçümü
 9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ F A K Ü L T E S İ O T O M O T İ V M Ü H E N D İ S L İ Ğ İ P R O G R A M I
 OTM309 MEKATRONİK S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ F A K Ü L T E S İ O T O M O T İ V M Ü H E N D İ S L İ Ğ İ P R O G R A M I ÖĞRENCİ ADI NO İMZA TARİH 26.11.2013
OTM309 MEKATRONİK S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ F A K Ü L T E S İ O T O M O T İ V M Ü H E N D İ S L İ Ğ İ P R O G R A M I ÖĞRENCİ ADI NO İMZA TARİH 26.11.2013
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. IŞIĞA DÖNEN KAFA Proje No:2
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA Proje No:2 Proje Raporu ÖMER FARUK ŞAHAN 12068030 16.01.2013 İstanbul İÇİNDEKİLER
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA Proje No:2 Proje Raporu ÖMER FARUK ŞAHAN 12068030 16.01.2013 İstanbul İÇİNDEKİLER
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri
 Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri") YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
Gerilim beslemeli invertörler, akım beslemeli invertörler / 13. Hafta. Sekil-7.7 de endüktif yükte çalışan PWM invertör görülmektedir.
 1 fazlı Gerilim Kaynaklı PWM invertörler (Endüktif yükte); Sekil-7.7 de endüktif yükte çalışan PWM invertör görülmektedir. Şekil-7.7 den görüldüğü gibi yükün endüktif olması durumunda, yük üzerindeki enerjinin
1 fazlı Gerilim Kaynaklı PWM invertörler (Endüktif yükte); Sekil-7.7 de endüktif yükte çalışan PWM invertör görülmektedir. Şekil-7.7 den görüldüğü gibi yükün endüktif olması durumunda, yük üzerindeki enerjinin
Şekil 3-1 Ses ve PWM işaretleri arasındaki ilişki
 DARBE GENİŞLİK MÖDÜLATÖRLERİ (PWM) (3.DENEY) DENEY NO : 3 DENEY ADI : Darbe Genişlik Modülatörleri (PWM) DENEYİN AMACI : µa741 kullanarak bir darbe genişlik modülatörünün gerçekleştirilmesi.lm555 in karakteristiklerinin
DARBE GENİŞLİK MÖDÜLATÖRLERİ (PWM) (3.DENEY) DENEY NO : 3 DENEY ADI : Darbe Genişlik Modülatörleri (PWM) DENEYİN AMACI : µa741 kullanarak bir darbe genişlik modülatörünün gerçekleştirilmesi.lm555 in karakteristiklerinin
Yüksek Kutup Sayısı? 66 ve 88 ne anlama geliyor. SQML Kodlama Sistemi. Patentli LiProKa Motor Prensibi ( Patent No: EP )
") Yüksek Kutup Sayısı? 66 ve 88 ne anlama geliyor Yüksek kutup sayısından dolayı daha geniş frekans aralığı ve sürücünün motora hakimiyeti daha fazla olup, ÇOK HASSAS DURUŞ ve KAKIŞAR YAPABİİRSİNİZ. SQM
Yüksek Kutup Sayısı? 66 ve 88 ne anlama geliyor Yüksek kutup sayısından dolayı daha geniş frekans aralığı ve sürücünün motora hakimiyeti daha fazla olup, ÇOK HASSAS DURUŞ ve KAKIŞAR YAPABİİRSİNİZ. SQM
Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir.
 ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1
 6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
YENİLENEBİLİR ENERJİ KAYNAKLARI RÜZGAR ENERJİSİ SİSTEMLERİ Eğitim Merkezi Projesi
 YENİLENEBİLİR ENERJİ KAYNAKLARI RÜZGAR ENERJİSİ SİSTEMLERİ Eğitim Merkezi Projesi Konu Başlıkları Enerjide değişim Enerji sistemleri mühendisliği Rüzgar enerjisi Rüzgar enerjisi eğitim müfredatı Eğitim
YENİLENEBİLİR ENERJİ KAYNAKLARI RÜZGAR ENERJİSİ SİSTEMLERİ Eğitim Merkezi Projesi Konu Başlıkları Enerjide değişim Enerji sistemleri mühendisliği Rüzgar enerjisi Rüzgar enerjisi eğitim müfredatı Eğitim
Yükseltici DA Kıyıcılar, Gerilim beslemeli invertörler / 12. Hafta
 E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri)
") KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
DERS NOTLARI. Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi
 DERS NOTLARI Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi Ders-3 11.10.2016 555-Zaman Entegresi 555 Zaman Entegre Devresi monastable multivibratör (asimetrik kare dalga osilatör), astable
DERS NOTLARI Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi Ders-3 11.10.2016 555-Zaman Entegresi 555 Zaman Entegre Devresi monastable multivibratör (asimetrik kare dalga osilatör), astable
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek
 Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
0 Giriş kontağı ile Servo On 1 Giriş kontağı aktif değil Powerda Servo On
 PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 Cn002.2 H0*00 Cn002.3 H*000 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol
PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 Cn002.2 H0*00 Cn002.3 H*000 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol
Asenkron Makineler (2/3)
") Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır.
 ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü
 DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
CW ve CCW yönü için Hız preset devri (rpm)
") PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol Switch 5 Pozisyon / Tork Kontrol
PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol Switch 5 Pozisyon / Tork Kontrol
İnönü Üniversitesi Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü
 İnönü Üniversitesi Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü 00223 - Mantık Devreleri Tasarımı Laboratuar Föyleri Numara: Ad Soyad: Arş. Grv. Bilal ŞENOL Devre Kurma Alanı Arş. Grv. Bilal ŞENOL
İnönü Üniversitesi Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü 00223 - Mantık Devreleri Tasarımı Laboratuar Föyleri Numara: Ad Soyad: Arş. Grv. Bilal ŞENOL Devre Kurma Alanı Arş. Grv. Bilal ŞENOL
Bölüm 13 FSK Modülatörleri.
 Bölüm 13 FSK Modülatörleri. 13.1 AMAÇ 1. Frekans Kaydırmalı Anahtarlama (FSK) modülasyonunun çalışma prensibinin anlaşılması.. FSK işaretlerinin ölçülmesi. 3. LM5 kullanarak bir FSK modülatörünün gerçekleştirilmesi.
Bölüm 13 FSK Modülatörleri. 13.1 AMAÇ 1. Frekans Kaydırmalı Anahtarlama (FSK) modülasyonunun çalışma prensibinin anlaşılması.. FSK işaretlerinin ölçülmesi. 3. LM5 kullanarak bir FSK modülatörünün gerçekleştirilmesi.
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ :
 SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
Bölüm 4 Ardışıl Lojik Devre Deneyleri
 Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
 BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
1 ALTERNATİF AKIMIN TANIMI
 1 ALTERNATİF AKIMIN TANIMI Alternatif Akımın Tanımı Doğru gerilim kaynağının gerilim yönü ve büyüklüğü sabit olmakta; buna bağlı olarak devredeki elektrik akımı da aynı yönlü ve sabit değerde olmaktadır.
1 ALTERNATİF AKIMIN TANIMI Alternatif Akımın Tanımı Doğru gerilim kaynağının gerilim yönü ve büyüklüğü sabit olmakta; buna bağlı olarak devredeki elektrik akımı da aynı yönlü ve sabit değerde olmaktadır.