ED-7255 ( 5 eksen Robot Kol )
|
|
|
- Hakan Ünal
- 8 yıl önce
- İzleme sayısı:
Transkript
1 ED-7255 ( 5 eksen Robot Kol ) Fast and easy interface using 3D S/W GUI Environment High level of Motion Control using Dual CPU (ARM, DSP) Smooth and delicate operation according to 5ms DSP Sampling Time Apply the Absolute Encoder(Needless Homing Work) Real-Time Monitoring using Ethernet Supply the library for controlling Robot using C/C++ in Embedded environment Kinematics & Inverse Kinematics Application to be connected with peripheral application equipment(mps) Educate the ARM Linux using NFS(Network File System) Checking the state of robot into simulator ED-IRS (Value of PID Gain, Encoder value for each of Joint) ARM PROCESSOR CPU» 666MHz NAND FLASH» 128MByte NOR FLASH» 1MByte DRAM» 128MByte DPRAM I
 ARM PROCESSOR CPU» 666MHz NAND FLASH» 128MByte NOR FLASH» 1MByte DRAM» 128MByte")
2 » 128k : DSP PROCESSOR TMS320F2811» 150MHz Motion Control» Closed loop operation Avaliable motor 8-axis» CPLD Avaliable PWM Generation» 8 axis Absolute encoder counter» 8 channels DRIVER PACK Operating environment» 24V, 120W Max INTERFACE USB» USB 11 A-Type(Pendant)» USB 20 B-Type(Host PC) Ethernet» 10Base-T RTC» Real Time Clock State LED» Alarm, Start/stop Character LCD» 20 x 2 Digital Input / output» 0~24V Analog Input / output» 0~10V Relay Output» SC, OC ROBOT BODY Width : 280mm Depth : 280mm Height : Max 786mm Weight : 127kg Operating Part Link Number Operating Range Link Length Weight No 0(Base) 0 80mm 59kg No 1-175~ mm 34kg No 2-30~ mm 33kg No 3-0~ mm 19kg No 4-90~+90 0mm 06kg No 5-170~+170 0mm 005kg No 6(Gripper) 0 ~ 80mm (Rubber Pad) 139mm 035kg II
 0 80mm 59kg No 1-175~+175 107mm 34kg No 2-30~+90 230mm 33kg No 3-0~+130 230mm 19kg No 4-90~+90 0mm 06kg No 5-170~+170 0mm 005kg No 6(Gripper) 0 ~ 80mm (Rubber Pad)")

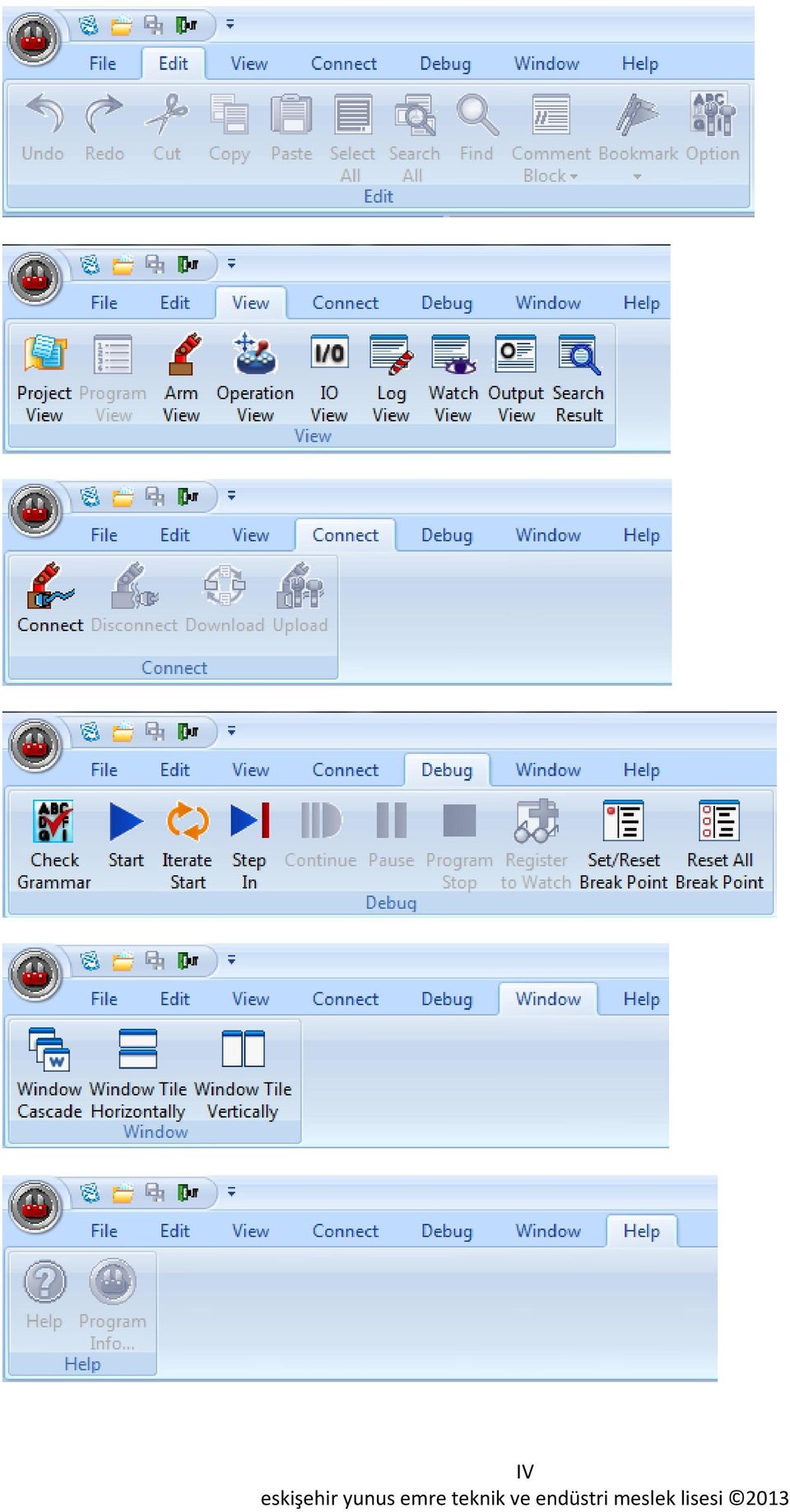
3 TEACH PANT Display : 20 x 2 Character LCD Interface : USB 11 Key : 37 user key(emergency switch included) ROBOT CONTROLLER DIMENSION Width : 250mm Depth : 309mm Height : 881mm Weight : 38kg TEACH PANT DIMENSION Width : 138mm Depth : 190mm Height : 40mm Weight : 055kg SIMULATOR ENVIRONMENT CPU : Pentium IV 2GHz or higher Memory : Above 512MB Operating System : Windows XP Graphic Card» 3D accelerated graphic card AC Power Cord USB Cable Controller Connection Cable Teach Pendant Cable RJ-45 Cable Software and User Manual ED-IRS ( Industrial Robot Simulation ) programının kullanımı; MENÜLER ; III
 programının kullanımı;")
4 IV
5 ED-IRS KOMUTLARI 1 Belirtme, Tanımlama Komutları; 11 : Tüm program yazılımı (script)bu komut ile başlar Programın ilk satırına program komutu yazılır Bu durumda derleyiciye (compiler)programın başlangıcı gösterilmiş olur MOVETO JPOS1 12 : Tüm program yazılımı (script)bu komut ile biter Programın son satırına end komutu yazılır Derleyici (compiler) bu komuttan sonra başka bir komutun olmadığı ve programın sonlandırıldığı bildirilir MOVETO JPOS1 13 REM : Bu komut ve ( )işareti ile başlayan satır bilgilendirme amacıyla kullanıcı tarafından yazılır Bu satırlar derleyici program tarafından dikkate alınmaz REM <bilgi amaçlı içerik> <bilgi amaçlı içerik> REM bu satır bilgi amaçlıdır bu satır bilgi amaçlı olmaya devam etmektedir 14 DIM: Komut tam sayı, gerçek sayı veya dizi gibi değerleri tanımlama amacıyla kullanılırdizi tanımlanırken işareti arasında gösterilmelidir Değişken tanımlama yapılırken mutlaka karakterle (harf) başlamalıdır Daha sonra bu karaktere sayı ile devam edilebilir Özel semboller kullanılmaz DIM VAR1 V

6 DIM VAR2, VAR3, VAR4 REM tam sayı VAR1 = 10 REM işlem VAR2 = 101+VAR1 REM dizi VAR3 = string REM tam sayı VAR4 = VAR1 Açıklama: DIM satırlarında, programda kullanılacak olan değişken isimleri tanıtılır Ardından bu değişken isimlere atanacak değerler bildirilir 15 DEFPOS, DEFPOSJ: Pozisyon değişkenlerini tanımlamada kullanılır Maniplatör hareket ettirilmek istendiğinde girilecek olan joint (eklem), yada cartesian (Kartezyen koordinat) değerleri için isim tanımlaması yapılır Ardından tanımlanan adres isimleri için koordinat verileri girilir DEFPOS Kartezyen tip pozisyon değişkeni için, DEFPOSJ ise Joint tip pozisyon değişkeni için kullanılır Eğer isim tanımlanacak pozisyon sayısı fazla ise, ile ayrılarak aynı satıra yazılabilir Yazılım ; DEFPOS <değişken adı> <değişken adı> = (<sayı>,<sayı>,<sayı>) DEFPOSJ <değişken adı> <değişken adı> = J(<sayı>,<sayı>,<sayı>,<sayı>,<sayı>)) DEFPOS POS1 DEFPOSJ JPOS4 POS1 = (10,10,0) JPOS4= J(10,10,10,10,10) 16 LABEL: GOTO komutu ile birlikte kullanılarak gönderilmesi istenilen satıra işlemin gönderilmesi için kullanılır Bu işlem için istenilen satırların başlangıcına etiket konulur <satır ismi> : <uygulanacak işlem> LABEL1 : MOVETO POS1 GOTO LABEL1 2 Kontrol Komutları; 21 GOTO: Bu komut, LABEL ile tanımlanmış olan ana program satırına yönlendirilir Gönderilen satır çalıştırılır komut kullanımında satır ismi LABEL komutu sonrasına eklenir VI

7 GOTO <satır ismi> LABEL1 : MOVETO POS1 GOTO LABEL1 22 GOSUB: Ana programdan, alt programa dallanma amacıyla kullanılır Alt fonksiyon kullanımı için satır tanımlaması SUB ile başlamalıdır Alt program SUB ile biter Alt program çalışmasını bitirdiğinde, alt programa gönderilen satıra geri dönülür GOSUB <sub-fonksiyon adı> IF var1>1 THEN GOSUB SUBFUNC SUB SUBFUNC SUB 23 IF THEN - ELSE: IF deyimi ardından gelen şart gerçekleştiğinde işlem yapılması isteniyorsa THEN, şart gerçekleşmediğinde işlem yapılması isteniyorsa ELSE deyimi IF den sonra kullanılır Fonksiyon, istenilen işlemi yaptıktan sonra bir sonraki satırdan program devam eder IF <izlenen durum> THEN <yapılması istenen eylem> ELSE <yapılması istenen eylem> IF VAR1>10 THEN MOVETO (101010) IF VAR2>=10 THEN GOTO LABEL1 ELSE GOTO LABEL2 Açıklama: ilk satırda var1 olarak tanımlanan değişken 10 değerinden büyük olursa kol (10,10,10) adresine gidecektir ikinci komut satırında ise program, var2 olarak tanımlanan değişken 10 değerine eşit veya büyükse label1 adresine, değilse label2 adresine yönlendirilir 24 IFINSIG: (D1) Dijital giriş sinyallerinin durumuna göre işlem yapılmasını sağlar Kontrolcüde DI1 DI8 arasında girişler vardır Eğer DI da bir sinyal varsa THEN, sinyal yoksa ELSE ile komutun devamı yazılır IF ON OFF <DI değişkeni> THEN <yapılması istenen eylem> ELSE <yapılması istenen eylem> VII
 IF VAR2>=10 THEN GOTO LABEL1 ELSE GOTO")
8 IFINSIG DI1 THEN GOTO LABEL1 IFINSIG OFF DI1 THEN GOTO LABEL2 ELSE GOTO LABEL1 Açıklama: ilk satırda DI1 on konumunda yani sinyal varsa label1 satırına yönlendirilir İkinci komut satırında ise DI1 off yani sinyal yoksa label2 adresine, on ise label1 adresine yönlendirilir 25 FOR - NEXT: Belirlenen bir değişkeni istenilen adımlarla, istenilen değere artırır Bu artırım esnasında komutun başlangıcı ile sonu arasında bulunan işlemler istenilen sayıda tekrarlanır Belirlenen değere ulaşıldığında döngüden çıkılır ve sıradaki komutlar işletilir Kullanıcı tarafından belirlenen şartlar meydana geldiğinde döngü sona gelmeden de bitirilebilir Bunun için EXITFOR kullanılır FOR VAR1=1 TO 10 STEP 1 IFINSIG DI1 THEN EXITFOR NEXT Açıklama: var1 değişkeni 1 den 10 a kadar 1 aralıkla artırılıyor 1, 10 değeri elde edilinceye kadar 1 er aralıkla artırılıyor Her bir artırımda next komutu görülünceye kadar aradaki komutlar işleniyor var1 değişkeni 10 değerine ulaştığında next komutundan geri dönüş gerçekleşmeden bir alt satıra geçiliyor Ancak bu işletim sırasında DI1 girişinden bir sinyal uygulanırsa var1 değişkeni 10 değerini beklemeden for-next döngüsünden çıkılır 26 DOWHILE DOUNTIL - LOOP: Belirlenen bir değişken istenilen değerde ise DOWHILE ile LOOP arasında kalan komutlar sürekli olarak tekrarlanmaya başlar Aksi olarak eğer belirlenen bir değişken istenilen değerde değil ise DOUNTIL ile LOOP arasında kalan komutlar sürekli olarak tekrarlanmaya başlar değişken değeri belirtilen değer dışına çıktıysa işlem sonlanır Ya da EXITDO komutu satırda okunursa LOOP tan sonraki satıra gidilir DOWHILE VAR1>10 IF VAR2==10 THEN EXITDO LOOP DOUNTIL VAR1<=10 IF VAR2==10 THEN EXIT DO LOOP VIII

9 Açıklama: İlk DO komut satırında var1 değişkeni 10 dan büyükse altındaki işlemler devamlı olarak tekrarlanır Bu arada var2 değişkeni 10 olursa işlem tekrarlanması (EXITDO ile)sona erdirilir İkinci DO satırında DOWHILE satır grubundaki işlem gerçekleştirilir 3 Robot Kol Komutları; 31 MOVETO / MOVE: MOVETO; programlama öncesinde girişi yapılmış mutlak koordinata dayalı olarak robotu taşıyan bir komuttur MOVE göreceli koordinata dayalı olarak robotu taşıyan bir komuttur Bu komut ile birlikte kolun istenilen noktaya ulaşırken interpolasyon seçeneklerine bağlı olarak hangi doğrultuda hareket edeceği ve adres bilgileri yazılımda girilir MOVETO MOVE <interpolasyon metodu>, <pozisyon değişkeni> <pozisyon değerleri>, <hız bilgisi> <interpolasyon metodu> : P PTOP L LINE <hız bilgisi> : S SPEED = <sayı> (bu değer kolun belirtilen adrese gidiş hızını tanımlar) <pozisyon değişkeni> <pozisyon değerleri> : kolun taşınacağı yeri tanımlayan adreslerdir Bu değerler önceden yüklenmiş adresler ya da yazılım satırında girilecek koordinatlar olabilir MOVE L, (50,50,50) MOVE P, J(50,10,30,40,20), SPEED=200 MOVETO J(10,10,10,10,10), S=100 MOVE J(10,10,10,10,10) MOVE JPOS3,S=100 MOVETO POS1 32 DEPART: Komut robot kolun bulunduğu konumdan Z ekseni boyunca belirtilen değerde hareket etmesini sağlar Komutun önüne interpolasyon metodu da eklenebilir DEPART <interpolasyon metodu>, yaklaşma mesafesi, hız değeri DEPART 10 (şimdiki konum (10,10,10) ise komut sonrası (10,10,20)adresine gider) DEPART L, 10, S=100 ((10,10,30) adresine interpolasyon ve 100 hız birimi ile gider) 33 HOME: HOME veya SETHOME komutları ile robot kolun park halinde bekletileceği konum seçilir Özellikle set edilmediğinde yazılım olarak J(0,0,0,0,0) adresi home set edilmiştir HOME SETHOME <joint pozisyon adı> <joint pozisyon değişkeni> JPOS1 = J(0,20,0,0,0) HOME JPOS1 IX

10 GOHOME 34 GOHOME: Robot kolun üretici tarafından önceden belirlenmiş başlangıç noktasına geri dönmesi için kullanılır MOVETO GOHOME JPOS1 35 OPEN: Robot kolun uc noktasına bağlanan yakalayıcının (gripper)hangi değere açılacağını tanımlamak için kullanılır (max: 100 tam açık değeri, min: 0 tam kapalı değeri) MOVETO JPOS1 OPEN CLOSE: Robot kolun uc noktasına bağlanan yakalayıcının (gripper)hangi değere kapanacağını tanımlamak için kullanılır (max: 100 tam kapalı değeri, min: 0 tam açık değeri) MOVETO JPOS1 CLOSE SET / RESET: Bu komut ile sayısal çıkış sinyalleri kontrol edilir SET belirtilen sayısal çıkışın 1, RESET ise belirtilen çıkışın 0 olmasına sağlar Komutta ALL kullanılırsa tüm sayısal çıkışlar kontrol edilir Çıkışın adresi belirtilirse sadece belirtilen adresler etkilenir SET RESET ALL <DO değişken no> OPEN RESET ALL MOVETO JPOS1 X

11 CLOSE 100 SET DO1,DO2 38 DELAY: Bu komut ile robot kontrol ilerlemesi belirli bir süre geciktirilir Set edilen süre 1/1000 saniye tabana göre hesaplanır DELAY <zaman> DELAY 1000 XI

idea rsbasic KOMUTLARI
 idea KOMUTLARI İÇİNDEKİLER 2.1 Etiketler (Labels)... 4 2.2 Yorumlar (Comments)... 5 2.3 Semboller (Symbols)... 6 2.4 backward (geri)... 7 2.5 debug (hata ayıkla/izle)... 8 2.6 dec (azalt)... 9 2.7 do..
idea KOMUTLARI İÇİNDEKİLER 2.1 Etiketler (Labels)... 4 2.2 Yorumlar (Comments)... 5 2.3 Semboller (Symbols)... 6 2.4 backward (geri)... 7 2.5 debug (hata ayıkla/izle)... 8 2.6 dec (azalt)... 9 2.7 do..
CNC MACH breakout board user manual V8 type
 CNC MACH breakout board user manual V8 type 1 Catalogue CNC Router breakout board V8 type user manual... Hata! Yer işareti tanımlanmamış. 1) Brief introduction:...3 2) Breakout board drawing:...4 3) Wiring:...5
CNC MACH breakout board user manual V8 type 1 Catalogue CNC Router breakout board V8 type user manual... Hata! Yer işareti tanımlanmamış. 1) Brief introduction:...3 2) Breakout board drawing:...4 3) Wiring:...5
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar
 7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
PCC 6505 PROFILE CUTTING LINE
 PCC 6505 PROFILE CUTTING LINE 1.DESCRIPTION PCC 6505 is a servo controlled machine which is specifically designed for the serial cutting of any kind of PVC and aluminum s in the market. The machine is
PCC 6505 PROFILE CUTTING LINE 1.DESCRIPTION PCC 6505 is a servo controlled machine which is specifically designed for the serial cutting of any kind of PVC and aluminum s in the market. The machine is
ORACLE DA KÜRSÖRLER. Gerekli sistem değişkenleri
 ORACLE DA KÜRSÖRLER Gerekli sistem değişkenleri SQL%ISOPEN : kürsör açıksa değeri true, kapalı ise değeri false SQL%ROWCOUNT : sql ile işlem gören kayıt sayısı bulunur. SQL%FOUND : sql işlemi sonucu, en
ORACLE DA KÜRSÖRLER Gerekli sistem değişkenleri SQL%ISOPEN : kürsör açıksa değeri true, kapalı ise değeri false SQL%ROWCOUNT : sql ile işlem gören kayıt sayısı bulunur. SQL%FOUND : sql işlemi sonucu, en
HSancak Nesne Tabanlı Programlama I Ders Notları
 Konsol Uygulaması Oluşturma Konsol uygulaması oluşturmak için program açıldıktan sonra Create: Project ya da New Project seçeneği tıklanabilir. New Project penceresini açmak için farklı yollar da vardır.
Konsol Uygulaması Oluşturma Konsol uygulaması oluşturmak için program açıldıktan sonra Create: Project ya da New Project seçeneği tıklanabilir. New Project penceresini açmak için farklı yollar da vardır.
PASCAL PROGRAMLAMA DİLİ YAPISI
 BÖLÜM 3 PASCAL PROGRAMLAMA DİLİ YAPISI 3.1. Giriş Bir Pascal programı en genel anlamda üç ayrı kısımdan oluşmuştur. Bu kısımlar bulunmaları gereken sıraya göre aşağıda verilmiştir. Program Başlığı; Tanımlama
BÖLÜM 3 PASCAL PROGRAMLAMA DİLİ YAPISI 3.1. Giriş Bir Pascal programı en genel anlamda üç ayrı kısımdan oluşmuştur. Bu kısımlar bulunmaları gereken sıraya göre aşağıda verilmiştir. Program Başlığı; Tanımlama
Ders Tanıtım Sunumu. Internet Programming II. Elbistan Meslek Yüksek Okulu Bahar Yarıyılı. Öğr. Gör. Murat KEÇECİOĞLU 1
 Ders Tanıtım Sunumu Internet Programming II Elbistan Meslek Yüksek Okulu 2012 2013 Bahar Yarıyılı Öğr. Gör. Murat KEÇECİOĞLU 1 PHP Program Yapısı Php çoğunlukla HTML etiketleri arasına gömülerek kullanılır.
Ders Tanıtım Sunumu Internet Programming II Elbistan Meslek Yüksek Okulu 2012 2013 Bahar Yarıyılı Öğr. Gör. Murat KEÇECİOĞLU 1 PHP Program Yapısı Php çoğunlukla HTML etiketleri arasına gömülerek kullanılır.
Şekil 2.31: Proje yöneticisi penceresinden değişkenleri tanımlama
 2.3.1.1. Değişken İşlemleri Proje Yöneticisi penceresinin üst kısmındaki açılım "Variables" seçildiğinde pencerenin altında klasör ayraç etiketleri şeklinde sistem değişkenlerini tanımlama seçenekleri
2.3.1.1. Değişken İşlemleri Proje Yöneticisi penceresinin üst kısmındaki açılım "Variables" seçildiğinde pencerenin altında klasör ayraç etiketleri şeklinde sistem değişkenlerini tanımlama seçenekleri
k ise bir gerçek sayı olsun. Buna göre aşağıdaki işlemler Matlab da yapılabilir.
 MATRİS TRANSPOZU: Bir matrisin satırlarını sütun, sütunlarınıda satır yaparak elde edilen matrise transpoz matris denilir. Diğer bir değişle, eğer A matrisi aşağıdaki gibi tanımlandıysa bu matrisin transpoz
MATRİS TRANSPOZU: Bir matrisin satırlarını sütun, sütunlarınıda satır yaparak elde edilen matrise transpoz matris denilir. Diğer bir değişle, eğer A matrisi aşağıdaki gibi tanımlandıysa bu matrisin transpoz
BİLGİSAYAR MÜHENDİSLİĞİ ALGORİTMA VE PROGRAMLAMA II 2.HAFTA SWİTCH (CASE), SAYAÇLAR, DÖNGÜLER,
, SAYAÇLAR, DÖNGÜLER,") BİLGİSAYAR MÜHENDİSLİĞİ ALGORİTMA VE PROGRAMLAMA II 2.HAFTA SWİTCH (CASE), SAYAÇLAR, DÖNGÜLER, C++ İÇİN UFAK HATIRLATMALAR Değişken adları bir harf ile başlamalıdır. (a-z, A-Z). Değişken adı numara içerebilir.
BİLGİSAYAR MÜHENDİSLİĞİ ALGORİTMA VE PROGRAMLAMA II 2.HAFTA SWİTCH (CASE), SAYAÇLAR, DÖNGÜLER, C++ İÇİN UFAK HATIRLATMALAR Değişken adları bir harf ile başlamalıdır. (a-z, A-Z). Değişken adı numara içerebilir.
İşletim Sistemlerine Giriş
 İşletim Sistemlerine Giriş İşletim Sistemleri ve Donanım İşletim Sistemlerine Giriş/ Ders01 1 İşletim Sistemi? Yazılım olmadan bir bilgisayar METAL yığınıdır. Yazılım bilgiyi saklayabilir, işleyebilir
İşletim Sistemlerine Giriş İşletim Sistemleri ve Donanım İşletim Sistemlerine Giriş/ Ders01 1 İşletim Sistemi? Yazılım olmadan bir bilgisayar METAL yığınıdır. Yazılım bilgiyi saklayabilir, işleyebilir
Programlamada Kullanılan Temel Parametreler
 TECO PLC: Programlamada Kullanılan Temel Parametreler X; PLC nin fiziksel giriş adresleri Y; PLC nin fiziksel giriş adresleri D; PLC nin veri adresleri T; PLC nin zaman rölesi ardesleri C; PLC nin sayıcı
TECO PLC: Programlamada Kullanılan Temel Parametreler X; PLC nin fiziksel giriş adresleri Y; PLC nin fiziksel giriş adresleri D; PLC nin veri adresleri T; PLC nin zaman rölesi ardesleri C; PLC nin sayıcı
Internet Programming II
 Internet Programming II Elbistan Meslek Yüksek Okulu 2016 2017 Bahar Yarıyılı Öğr. Gör. Murat KEÇECĠOĞLU 1 PHP Program Yapısı Php çoğunlukla HTML etiketleri arasına gömülerek kullanılır. Form işlemleri
Internet Programming II Elbistan Meslek Yüksek Okulu 2016 2017 Bahar Yarıyılı Öğr. Gör. Murat KEÇECĠOĞLU 1 PHP Program Yapısı Php çoğunlukla HTML etiketleri arasına gömülerek kullanılır. Form işlemleri
BİL-142 Bilgisayar Programlama II
 BİL-142 Bilgisayar Programlama II (C/C++) Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Giriş Kontrol Yapıları if Seçme Deyimi if... else Seçme Deyimi while Tekrar
BİL-142 Bilgisayar Programlama II (C/C++) Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Giriş Kontrol Yapıları if Seçme Deyimi if... else Seçme Deyimi while Tekrar
HSancak Nesne Tabanlı Programlama I Ders Notları
 DİZİLER Bellekte ard arda yer alan aynı türden nesneler kümesine dizi (array) denilir. Bir dizi içerisindeki bütün elemanlara aynı isimle ulaşılır. Yani dizideki bütün elemanların isimleri ortaktır. Elemanlar
DİZİLER Bellekte ard arda yer alan aynı türden nesneler kümesine dizi (array) denilir. Bir dizi içerisindeki bütün elemanlara aynı isimle ulaşılır. Yani dizideki bütün elemanların isimleri ortaktır. Elemanlar
4- Turbo Pascal Bilgisayar Programlamada Kullanılan Şart Yapıları
 4- Turbo Pascal Bilgisayar Programlamada Kullanılan Şart Yapıları Şart yapıları bir bilgisayar programının olmazsa olmazlarındandır. Şart yapıları günlük hayatımızda da çok fazla karşılaştığımız belirli
4- Turbo Pascal Bilgisayar Programlamada Kullanılan Şart Yapıları Şart yapıları bir bilgisayar programının olmazsa olmazlarındandır. Şart yapıları günlük hayatımızda da çok fazla karşılaştığımız belirli
6. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II. Öğr.Gör. Hakan YILMAZ. hakanyilmaz@karabuk.edu.tr
 6. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II Öğr.Gör. Hakan YILMAZ hakanyilmaz@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler For Each... Next... 3 Döngüyü
6. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II Öğr.Gör. Hakan YILMAZ hakanyilmaz@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler For Each... Next... 3 Döngüyü
Ethercat 1S Servo Kütüphanesi
 Ethercat 1S Servo Kütüphanesi İÇİNDEKİLER Giriş Uygulanabilir ürünler/versiyonlar Doğru kullanım için öneriler/önlemler Kütüphane indirme ve kurulumu Sycmac Studio da projeye kütüphane ekleme Backup_1S
Ethercat 1S Servo Kütüphanesi İÇİNDEKİLER Giriş Uygulanabilir ürünler/versiyonlar Doğru kullanım için öneriler/önlemler Kütüphane indirme ve kurulumu Sycmac Studio da projeye kütüphane ekleme Backup_1S
KONTROL YAPILARI (CONTROL STRUCTURES)
") Öğr.Gör.Bülent ÇOBANOĞLU, Visual BASIC Ders Notları-I 0 KONTROL YAPILARI (CONTROL STRUCTURES) GĠRĠġ Kontrol yapıları, program akışını değiştirmek için kullanılan yapılardır. Yapısal programlama dillerinde
Öğr.Gör.Bülent ÇOBANOĞLU, Visual BASIC Ders Notları-I 0 KONTROL YAPILARI (CONTROL STRUCTURES) GĠRĠġ Kontrol yapıları, program akışını değiştirmek için kullanılan yapılardır. Yapısal programlama dillerinde
SPSS (Statistical Package for Social Sciences)
") SPSS (Statistical Package for Social Sciences) SPSS Data Editor: Microsoft Excel formatına benzer satır ve sütunlardan oluşan çalışma sayfası (*sav) Data Editör iki arayüzden oluşur. 1. Data View 2. Variable
SPSS (Statistical Package for Social Sciences) SPSS Data Editor: Microsoft Excel formatına benzer satır ve sütunlardan oluşan çalışma sayfası (*sav) Data Editör iki arayüzden oluşur. 1. Data View 2. Variable
1. LabVIEW ile Programlama
 1. LabVIEW ile Programlama LabVIEW ile programlama mantığı, program kodu yazılan programlama mantığına benzemekle birlikte, kontrol adı verilen nesneler arasında veri yolu bağlantısı ile program akışı
1. LabVIEW ile Programlama LabVIEW ile programlama mantığı, program kodu yazılan programlama mantığına benzemekle birlikte, kontrol adı verilen nesneler arasında veri yolu bağlantısı ile program akışı
T.C. RC SERVO MOTOR KONTROLÜ
 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 2 ROBOT PROGRAMLAMA 2 / KUKA
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 2 ROBOT PROGRAMLAMA 2 / KUKA DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ Mayıs 2013 KAYSERİ 1. GİRİŞ Deneyde
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 2 ROBOT PROGRAMLAMA 2 / KUKA DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ Mayıs 2013 KAYSERİ 1. GİRİŞ Deneyde
Y-0048. Fiber Optik Haberleşme Eğitim Seti Fiber Optic Communication Training Set
 Genel Özellikler General Specifications temel fiber optik modülasyon ve demodülasyon uygulamaların yapılabilmesi amacıyla tasarlanmış Ana Ünite ve 9 adet Uygulama Modülünden oluşmaktadır. Ana ünite üzerinde
Genel Özellikler General Specifications temel fiber optik modülasyon ve demodülasyon uygulamaların yapılabilmesi amacıyla tasarlanmış Ana Ünite ve 9 adet Uygulama Modülünden oluşmaktadır. Ana ünite üzerinde
1. PROGRAMLAMA. PDF created with pdffactory Pro trial version www.pdffactory.com
 . PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
. PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
NJ-NJ ETHERNET/IP HABERLEŞMESİ
 NJ-NJ ETHERNET/IP HABERLEŞMESİ İÇİNDEKİLER Giriş NJ Kontrolcü Ayarlarının yapılması Sysmac Studio da Global Değişken Atama Ethernet/IP Bağlantı Ayarlarının yapılması Sysmac Studio da Değişkenlerin İzlenmesi
NJ-NJ ETHERNET/IP HABERLEŞMESİ İÇİNDEKİLER Giriş NJ Kontrolcü Ayarlarının yapılması Sysmac Studio da Global Değişken Atama Ethernet/IP Bağlantı Ayarlarının yapılması Sysmac Studio da Değişkenlerin İzlenmesi
Bölüm 1 Ürüne Genel Bakış
 Bölüm 1 Ürüne Genel Bakış 1.1 Ürün Etiketi Şekil 1-1 Etiket Model Instruction Model numarası bazı rakam ve harfler içerir. Bu işaretler cihazın gücünü, güç seviyesini ve bazı diğer özel bilgileri içerir.
Bölüm 1 Ürüne Genel Bakış 1.1 Ürün Etiketi Şekil 1-1 Etiket Model Instruction Model numarası bazı rakam ve harfler içerir. Bu işaretler cihazın gücünü, güç seviyesini ve bazı diğer özel bilgileri içerir.
ĐŞARET ĐŞLEME (SIGNAL PROCESSING)
") ĐŞARET ĐŞLEME (SIGNAL PROCESSING) Modern ölçme sistemlerinde Đşaret Đşleme bloğunun yerini çoğunlukla bir PC almıştır. Söz konusu bloğun en önemli fonksiyonu, ölçülen fiziksel büyüklük elektriksel işarete
ĐŞARET ĐŞLEME (SIGNAL PROCESSING) Modern ölçme sistemlerinde Đşaret Đşleme bloğunun yerini çoğunlukla bir PC almıştır. Söz konusu bloğun en önemli fonksiyonu, ölçülen fiziksel büyüklük elektriksel işarete
Programlamaya Giriş Karar Yapıları, Tekrarlı İfadeler(Döngüler)
") Programlamaya Giriş Karar Yapıları, Tekrarlı İfadeler(Döngüler) Konular Program Blokları Sıra Yapısı Kontrol Yapıları Karar Yapıları (İf) İf/Else İç İçe İf/Else Switch-Case (Çoklu Dallanma Yapıları) Döngüler
Programlamaya Giriş Karar Yapıları, Tekrarlı İfadeler(Döngüler) Konular Program Blokları Sıra Yapısı Kontrol Yapıları Karar Yapıları (İf) İf/Else İç İçe İf/Else Switch-Case (Çoklu Dallanma Yapıları) Döngüler
Özyineleme (Recursion)
") C PROGRAMLAMA Özyineleme (Recursion) Bir fonksiyonun kendisini çağırarak çözüme gitmesine özyineleme (recursion), böyle çalışan fonksiyonlara da özyinelemeli (recursive) fonksiyonlar denilir. Özyineleme,
C PROGRAMLAMA Özyineleme (Recursion) Bir fonksiyonun kendisini çağırarak çözüme gitmesine özyineleme (recursion), böyle çalışan fonksiyonlara da özyinelemeli (recursive) fonksiyonlar denilir. Özyineleme,
Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği C Programlama 5. Bölüm Karar ve Çevrim Kontrol Yapıları
 Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği C Programlama 5. Bölüm Karar ve Çevrim Kontrol Yapıları C Programlama Dr. Serkan DİŞLİTAŞ 5.1. Atlama Komutları Program akışının yönlendirilmesinde
Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği C Programlama 5. Bölüm Karar ve Çevrim Kontrol Yapıları C Programlama Dr. Serkan DİŞLİTAŞ 5.1. Atlama Komutları Program akışının yönlendirilmesinde
Dinamik Kodlama. [X] Fusion@6. [X] Yeni Fonksiyon
![Dinamik Kodlama. [X] Fusion@6. [X] Yeni Fonksiyon](/thumbs/24/3157023.jpg "Dinamik Kodlama. [X] Fusion@6. [X] Yeni Fonksiyon") Dinamik Kodlama Ürün Grubu Kategori Versiyon Önkoşulu [X] Fusion@6 [X] Yeni Fonksiyon @6 Uygulama @6 Serisi ürünlerde, kullanıcı arabirimlerinin her yerine eklenen dinamik kodlama özelliği ile, programın
Dinamik Kodlama Ürün Grubu Kategori Versiyon Önkoşulu [X] Fusion@6 [X] Yeni Fonksiyon @6 Uygulama @6 Serisi ürünlerde, kullanıcı arabirimlerinin her yerine eklenen dinamik kodlama özelliği ile, programın
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
C-Serisi PLC İleri Seviye Eğitim
 C-Serisi PLC İleri Seviye Eğitim 1 PLC ye Giriş 2 PLC ye Giriş 3 PLC ye Giriş CJ1 I/O Modülleri - 8/16/32/64pts Max I/O - 160,640 Max Program Kapasitesi - 20K Steps Komut sayısı - 400 4 PLC Ladder Diyagram
C-Serisi PLC İleri Seviye Eğitim 1 PLC ye Giriş 2 PLC ye Giriş 3 PLC ye Giriş CJ1 I/O Modülleri - 8/16/32/64pts Max I/O - 160,640 Max Program Kapasitesi - 20K Steps Komut sayısı - 400 4 PLC Ladder Diyagram
24kV,630A Outdoor Switch Disconnector with Arc Quenching Chamber (ELBI) IEC IEC IEC 60129
 IEC IEC IEC 60129") 24kV,630 Outdoor Switch Disconnector with rc Quenching Chamber (ELBI) IEC265-1 IEC 694 IEC 129 Type ELBI-HN (24kV,630,normal) Closed view Open view Type ELBI-HS (24kV,630,with fuse base) Closed view Open
24kV,630 Outdoor Switch Disconnector with rc Quenching Chamber (ELBI) IEC265-1 IEC 694 IEC 129 Type ELBI-HN (24kV,630,normal) Closed view Open view Type ELBI-HS (24kV,630,with fuse base) Closed view Open
Önsöz. İçindekiler Algoritma Algoritma Nasıl Hazırlanır? Yazılımda Algoritma Mantığı Nedir? 1.2. Algoritma Örnekleri ve Sorular
 Önsöz Giriş İçindekiler V VII IX 1.1. Algoritma 1.1.1. Algoritma Nasıl Hazırlanır? 1.1.2. Yazılımda Algoritma Mantığı Nedir? 1.2. Algoritma Örnekleri ve Sorular 2.1. Programın Akış Yönü 19 2.2. Başlama
Önsöz Giriş İçindekiler V VII IX 1.1. Algoritma 1.1.1. Algoritma Nasıl Hazırlanır? 1.1.2. Yazılımda Algoritma Mantığı Nedir? 1.2. Algoritma Örnekleri ve Sorular 2.1. Programın Akış Yönü 19 2.2. Başlama
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
CJ-CP1H-CP1L PLCLERĐNDE FONKSĐYON BLOĞU OLUŞTURMA
 CJ-CP1H-CP1L PLCLERĐNDE FONKSĐYON BLOĞU OLUŞTURMA ĐÇĐNDEKĐLER Fonksiyon Bloğu Oluşturma Input ve Outputların Tanıtılması Programın Yazılması Programın Çalıştırılması Fonksiyon Bloğu Oluşturma Öncelikle
CJ-CP1H-CP1L PLCLERĐNDE FONKSĐYON BLOĞU OLUŞTURMA ĐÇĐNDEKĐLER Fonksiyon Bloğu Oluşturma Input ve Outputların Tanıtılması Programın Yazılması Programın Çalıştırılması Fonksiyon Bloğu Oluşturma Öncelikle
Adım Adım SPSS. 1- Data Girişi ve Düzenlemesi 2- Hızlı Menü. Y. Doç. Dr. İbrahim Turan Nisan 2011
 Adım Adım SPSS 1- Data Girişi ve Düzenlemesi 2- Hızlı Menü Y. Doç. Dr. İbrahim Turan Nisan 2011 File (Dosya) Menüsü Excel dosyalarını SPSS e aktarma Variable View (Değişken Görünümü 1- Name (İsim - Kod)
Adım Adım SPSS 1- Data Girişi ve Düzenlemesi 2- Hızlı Menü Y. Doç. Dr. İbrahim Turan Nisan 2011 File (Dosya) Menüsü Excel dosyalarını SPSS e aktarma Variable View (Değişken Görünümü 1- Name (İsim - Kod)
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 2 ROBOT PROGRAMLAMA 1 / MOTOMAN
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 2 ROBOT PROGRAMLAMA 1 / MOTOMAN DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ Nisan 2013 KAYSERİ 1. GİRİŞ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 2 ROBOT PROGRAMLAMA 1 / MOTOMAN DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ Nisan 2013 KAYSERİ 1. GİRİŞ
2013-14 GÜZ YY. - MKT103 - GÖRSEL PROGRAMLAMA DERSİ - ARA SINAVI
 2013-14 GÜZ YY. - MKT103 - GÖRSEL PROGRAMLAMA DERSİ - ARA SINAVI KOÜ Mekatronik Mühendisliği Bölümü/MKT-103-Görsel Programlama Dersi - Ara Sınav J-grubu Ad-Soyad:...No:... J GRUBU-süre:70dk 1.) Aşağıdaki
2013-14 GÜZ YY. - MKT103 - GÖRSEL PROGRAMLAMA DERSİ - ARA SINAVI KOÜ Mekatronik Mühendisliği Bölümü/MKT-103-Görsel Programlama Dersi - Ara Sınav J-grubu Ad-Soyad:...No:... J GRUBU-süre:70dk 1.) Aşağıdaki
MAT213 BİLGİSAYAR PROGRAMLAMA I DERSİ Ders 1: Programlamaya Giriş
 MAT213 BİLGİSAYAR PROGRAMLAMA I DERSİ Ders 1: Programlamaya Giriş Yard. Doç. Dr. Alper Kürşat Uysal Bilgisayar Mühendisliği Bölümü akuysal@anadolu.edu.tr Ders Web Sayfası: http://ceng.anadolu.edu.tr/ders.aspx?dersid=101
MAT213 BİLGİSAYAR PROGRAMLAMA I DERSİ Ders 1: Programlamaya Giriş Yard. Doç. Dr. Alper Kürşat Uysal Bilgisayar Mühendisliği Bölümü akuysal@anadolu.edu.tr Ders Web Sayfası: http://ceng.anadolu.edu.tr/ders.aspx?dersid=101
8086 nın Bacak Bağlantısı ve İşlevleri. 8086, 16-bit veri yoluna (data bus) 8088 ise 8- bit veri yoluna sahip16-bit mikroişlemcilerdir.
 8088 ise 8- bit veri yoluna sahip16-bit mikroişlemcilerdir.") Bölüm 9: 8086 nın Bacak Bağlantısı ve İşlevleri 8086 & 8088 her iki işlemci 40-pin dual in-line (DIP) paketinde üretilmişlerdir. 8086, 16-bit veri yoluna (data bus) 8088 ise 8- bit veri yoluna sahip16-bit
Bölüm 9: 8086 nın Bacak Bağlantısı ve İşlevleri 8086 & 8088 her iki işlemci 40-pin dual in-line (DIP) paketinde üretilmişlerdir. 8086, 16-bit veri yoluna (data bus) 8088 ise 8- bit veri yoluna sahip16-bit
EEProm 24C08 UYGULAMA AMAÇ 24C08 MCU_VCC. e r : d e G. Sayfa - 1
 V0 DT2 PIC16F877 1KΩ 1KΩ Prom UYGULAMA AMAÇ prom kalıcı hafıza entegresine, PIC16F77 mikrodenetleyicisinin PD0 ve PD1 portları üzerinden bilgi kayıt edip, kayıt edilen bilgiyi Prom dan okuyarak LCD ekranda
V0 DT2 PIC16F877 1KΩ 1KΩ Prom UYGULAMA AMAÇ prom kalıcı hafıza entegresine, PIC16F77 mikrodenetleyicisinin PD0 ve PD1 portları üzerinden bilgi kayıt edip, kayıt edilen bilgiyi Prom dan okuyarak LCD ekranda
1. Excel Dönüşümü : 2. Rapor Master Tanımları :
 Programın Amacı : Bu Program As/400 Sistemindeki herhangi bir veya birden fazla file ı kullanarak istenilen şekilde sorgulama yaparak elde edilen bilgileri Excel Formatında Pc deki istenilen bir yere kaydetmek.
Programın Amacı : Bu Program As/400 Sistemindeki herhangi bir veya birden fazla file ı kullanarak istenilen şekilde sorgulama yaparak elde edilen bilgileri Excel Formatında Pc deki istenilen bir yere kaydetmek.
Bilgisayar Programlama
 Bilgisayar Programlama M Dosya Yapısı Kontrol Yapıları Doç. Dr. İrfan KAYMAZ Matlab Ders Notları M-dosyası Genel tanıtımı : Bir senaryo dosyası (script file) özel bir görevi yerine getirmek için gerekli
Bilgisayar Programlama M Dosya Yapısı Kontrol Yapıları Doç. Dr. İrfan KAYMAZ Matlab Ders Notları M-dosyası Genel tanıtımı : Bir senaryo dosyası (script file) özel bir görevi yerine getirmek için gerekli
DTB B Serisi Sıcaklık Kontrol Cihazı
 DTB B Serisi Sıcaklık Kontrol Cihazı 1-) GİRİŞ SENSÖR TİPİ SEÇİMİ: DTB de giriş sensör tipi akım, gerilim, PT100 veya Termokupl olabilir. : Çalışma ekranından tuşu ile ulaşılır. B,S,R tipi termokupllar
DTB B Serisi Sıcaklık Kontrol Cihazı 1-) GİRİŞ SENSÖR TİPİ SEÇİMİ: DTB de giriş sensör tipi akım, gerilim, PT100 veya Termokupl olabilir. : Çalışma ekranından tuşu ile ulaşılır. B,S,R tipi termokupllar
Yukardaki gibi sonsuz döngülü programlara Ctrl+Break tuş takımı ile müdahale edilmesi gerekir, aksi halde program sonsuz döngüye girer.
 Döngüsü En basit döngü yapısıdır. Hiçbir kontrol yapılmadan ve ifadeleri arasındaki satırların işlem görmesi için kullanılır. Bu yapıda programın terkedilmesi için herhangi bir kontrol olmadığından, döngü
Döngüsü En basit döngü yapısıdır. Hiçbir kontrol yapılmadan ve ifadeleri arasındaki satırların işlem görmesi için kullanılır. Bu yapıda programın terkedilmesi için herhangi bir kontrol olmadığından, döngü
Genel Kullanılış 1: [değişken ismi] = [değişken ismi] [işlem] [sayı veya string ifade veya değişken]
![Genel Kullanılış 1: [değişken ismi] = [değişken ismi] [işlem] [sayı veya string ifade veya değişken]](/thumbs/32/15431850.jpg "Genel Kullanılış 1: [değişken ismi] = [değişken ismi] [işlem] [sayı veya string ifade veya değişken]") Sayaçlar Düzenli olarak artan (+) veya azalan (-) sayı veya string ifadeler elde etmek için kullanılırlar. Eşitliğin her iki tarafındaki değişken isminin aynı olmasına dikkat edin. Bu durum matematik olarak
Sayaçlar Düzenli olarak artan (+) veya azalan (-) sayı veya string ifadeler elde etmek için kullanılırlar. Eşitliğin her iki tarafındaki değişken isminin aynı olmasına dikkat edin. Bu durum matematik olarak
Döngü (Loop) Deyimleri / Veri Belirleyicileri / Matematiksel Fonksiyonlar
 Deyimleri / Veri Belirleyicileri / Matematiksel Fonksiyonlar") Bölüm 5 Döngü (Loop) Deyimleri / Veri Belirleyicileri / Matematiksel Fonksiyonlar İçindekiler 5.1 Formatlı Yazdırma............................ 34 5.2 Döngü Deyimleri............................. 34 5.2.1
Bölüm 5 Döngü (Loop) Deyimleri / Veri Belirleyicileri / Matematiksel Fonksiyonlar İçindekiler 5.1 Formatlı Yazdırma............................ 34 5.2 Döngü Deyimleri............................. 34 5.2.1
BİL-142 Bilgisayar Programlama II
 BİL-142 Bilgisayar Programlama II (C/C++) Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Giriş Sınıflar, Nesneler, Fonksiyon ve Veri Üyeleri Sınıf ve Fonksiyon Üyeleri
BİL-142 Bilgisayar Programlama II (C/C++) Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Giriş Sınıflar, Nesneler, Fonksiyon ve Veri Üyeleri Sınıf ve Fonksiyon Üyeleri
5. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II. Öğr.Gör. Hakan YILMAZ. hakanyilmaz@karabuk.edu.tr
 5. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II Öğr.Gör. Hakan YILMAZ hakanyilmaz@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler STRING FONKSİYONU... 3 SPLIT FONKSİYONU...
5. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II Öğr.Gör. Hakan YILMAZ hakanyilmaz@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler STRING FONKSİYONU... 3 SPLIT FONKSİYONU...
Bu amaçla, if ve switch gibi karar verme deyimleri, for, while, do..while gibi döngü deyimleri kullanılır.
 PHP de Program Denetimi Belli durumlarda örneğin değişkenlerin aldığı değerlere veya sayfaya yapılan ziyaretlere göre PHP programının nasıl davranacağına karar vermemiz gerekir. Bu yönlendirmeleri, program
PHP de Program Denetimi Belli durumlarda örneğin değişkenlerin aldığı değerlere veya sayfaya yapılan ziyaretlere göre PHP programının nasıl davranacağına karar vermemiz gerekir. Bu yönlendirmeleri, program
Command: zoom [All/Center/Dynamic/Extents/Previous/Scale/Window] <real time>: a
![Command: zoom [All/Center/Dynamic/Extents/Previous/Scale/Window] <real time>: a](/thumbs/26/7709877.jpg "Command: zoom [All/Center/Dynamic/Extents/Previous/Scale/Window] <real time>: a") AUTOCAD: ZOOM Menü : VIEW ZOOM Komut: zoom Komut Kısaltma: Z Command: zoom [All/Center/Dynamic/Extents/Previous/Scale/Window] : a All: Çizim limitleri içindeki çizimi ekrana sığdıracak şekilde
AUTOCAD: ZOOM Menü : VIEW ZOOM Komut: zoom Komut Kısaltma: Z Command: zoom [All/Center/Dynamic/Extents/Previous/Scale/Window] : a All: Çizim limitleri içindeki çizimi ekrana sığdıracak şekilde
BÖLÜM 6: KARŞILAŞTIRMALI KONTROL YAPILARI
 BÖLÜM 6: KARŞILAŞTIRMALI KONTROL YAPILARI C programlama dilinde, diğer programlama dillerinde olduğu gibi, işlemler, ilk satırdan başlamak üzere sırayla çalışır. Program kontrol yapıları ise, programın
BÖLÜM 6: KARŞILAŞTIRMALI KONTROL YAPILARI C programlama dilinde, diğer programlama dillerinde olduğu gibi, işlemler, ilk satırdan başlamak üzere sırayla çalışır. Program kontrol yapıları ise, programın
SAVİOR OTOMASYON TEKNİK DESTEK BİRİMİ
 FPWINPRO7_Servo motor trapezoidal fonksiyon bloğu (TRAPEZOİDAL FONKSİYON BLOĞU: Tetik verildiği an belirlenen hedef değere giden bloktur.) İlk olarak FPWINPRO 7 programımızı açalım. Başlamadan önce gerekli
FPWINPRO7_Servo motor trapezoidal fonksiyon bloğu (TRAPEZOİDAL FONKSİYON BLOĞU: Tetik verildiği an belirlenen hedef değere giden bloktur.) İlk olarak FPWINPRO 7 programımızı açalım. Başlamadan önce gerekli
Yazılım Nedir? 2. Yazılımın Tarihçesi 3. Yazılım Grupları 4 Sistem Yazılımları 4 Kullanıcı Yazılımları 5. Yazılımın Önemi 6
 ix Yazılım Nedir? 2 Yazılımın Tarihçesi 3 Yazılım Grupları 4 Sistem Yazılımları 4 Kullanıcı Yazılımları 5 Yazılımın Önemi 6 Yazılımcı (Programcı) Kimdir? 8 Yazılımcı Olmak 9 Adım Adım Yazılımcılık 9 Uzman
ix Yazılım Nedir? 2 Yazılımın Tarihçesi 3 Yazılım Grupları 4 Sistem Yazılımları 4 Kullanıcı Yazılımları 5 Yazılımın Önemi 6 Yazılımcı (Programcı) Kimdir? 8 Yazılımcı Olmak 9 Adım Adım Yazılımcılık 9 Uzman
LBP7200Cdn. Özellikler
 Canon i-sensys LBP7200Cdn Lazer Yazıcılar Bu ağa hazır, kompakt, renkli lazer yazıcı, üretken otomatik çift taraflı baskı ve enerji verimliliğiyle hızlı, profesyonel renkli baskılara ihtiyacı olan küçük
Canon i-sensys LBP7200Cdn Lazer Yazıcılar Bu ağa hazır, kompakt, renkli lazer yazıcı, üretken otomatik çift taraflı baskı ve enerji verimliliğiyle hızlı, profesyonel renkli baskılara ihtiyacı olan küçük
Algoritma ve Programlama: Karar Yapıları ve Döngüler
 Algoritma ve Programlama: Karar Yapıları ve Döngüler Bir algoritma, herhangi bir programlama dili (C, C++, Pascal, Visual Basic, Java gibi) ile kodlandığında program haline gelir. Algoritmada yer alan
Algoritma ve Programlama: Karar Yapıları ve Döngüler Bir algoritma, herhangi bir programlama dili (C, C++, Pascal, Visual Basic, Java gibi) ile kodlandığında program haline gelir. Algoritmada yer alan
Programlama Dilleri 3
 Akış Konrol Mekanizmaları 1 Koşul İfadeleri Programlar içersinde bazı durumlarda programın akışının değişmesi ya da farklı işlemlerin yapılması gerekebilir. Bazen de seçimlerin yapılması ya da belirli
Akış Konrol Mekanizmaları 1 Koşul İfadeleri Programlar içersinde bazı durumlarda programın akışının değişmesi ya da farklı işlemlerin yapılması gerekebilir. Bazen de seçimlerin yapılması ya da belirli
BTP 207 İNTERNET PROGRAMCILIĞI I. Ders 9
 BTP 207 İNTERNET PROGRAMCILIĞI I Ders 9 Dizi Değişkenler (Array) 2 Tek değişkende birden fazla bilgi tutulmak istendiğinde kullanılır. Kullanım şekli: var dizi_adı= new Array(eleman1, eleman2,, elemann)
BTP 207 İNTERNET PROGRAMCILIĞI I Ders 9 Dizi Değişkenler (Array) 2 Tek değişkende birden fazla bilgi tutulmak istendiğinde kullanılır. Kullanım şekli: var dizi_adı= new Array(eleman1, eleman2,, elemann)
İnternet Programcılığı Dersi 2.Dönem Ders Notu
 İnternet Programcılığı Dersi 2.Dönem Ders Notu DEĞİŞKEN TİPLERİ TAM SAYI (İNTEGER) VERİ TİPİ Negatif veya pozitif ondalık kısmı bulunmayan sayılardır. Örnek: $i=65; $x=345; ONDALIK(REAL)VERİ TİPİ Ondalıklı
İnternet Programcılığı Dersi 2.Dönem Ders Notu DEĞİŞKEN TİPLERİ TAM SAYI (İNTEGER) VERİ TİPİ Negatif veya pozitif ondalık kısmı bulunmayan sayılardır. Örnek: $i=65; $x=345; ONDALIK(REAL)VERİ TİPİ Ondalıklı
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
SM 100 Terazi Ayarları. Digi SM 100. SM 100 Terazi Ayarları
 Digi SM 100 SM 100 Terazi Ayarları Digi SM 100 Terazi Ayarları Teraziyi ayarlamaya başlamak için öncelikle X S Z ENTER Raporlar Program Ayarlar FONKSIYON Bölümlerine geçiş yapabilmemiz gerekmektedir. Bunun
Digi SM 100 SM 100 Terazi Ayarları Digi SM 100 Terazi Ayarları Teraziyi ayarlamaya başlamak için öncelikle X S Z ENTER Raporlar Program Ayarlar FONKSIYON Bölümlerine geçiş yapabilmemiz gerekmektedir. Bunun
Algoritma ve Programlamaya Giriş II JAVA İLE PROGRAMLAMA. Muhammet BAYKARA
 Algoritma ve Programlamaya Giriş II JAVA İLE PROGRAMLAMA Muhammet BAYKARA 1 İlkel Veri Türleri Type Name Kind of Value Memory Used Size Range byte integer 1 byte -128 to 127 short integer 2 bytes -32768
Algoritma ve Programlamaya Giriş II JAVA İLE PROGRAMLAMA Muhammet BAYKARA 1 İlkel Veri Türleri Type Name Kind of Value Memory Used Size Range byte integer 1 byte -128 to 127 short integer 2 bytes -32768
SQL 2005 SQL STUDIO MANAGER ACP YAZILIMI KURULUM KILAVUZU
 SQL 2005 SQL STUDIO MANAGER ACP YAZILIMI KURULUM KILAVUZU Sayfa 1 / 18 KURULUMA BAŞLANMADAN ÖNCE YAPILMASI GEREKENLER : Sistem Özelliklerinden işletim sisteminin 32-bit mi yoksa 64-bit mi olduğu kontrol
SQL 2005 SQL STUDIO MANAGER ACP YAZILIMI KURULUM KILAVUZU Sayfa 1 / 18 KURULUMA BAŞLANMADAN ÖNCE YAPILMASI GEREKENLER : Sistem Özelliklerinden işletim sisteminin 32-bit mi yoksa 64-bit mi olduğu kontrol
8. Bölüm Gripper Kontrolü
 8. Bölüm Gripper Kontrolü 8. Bölüm: Gripper Kontrolü 8.1. Tutucular (Grippers) Endüstriyel robot uygulamalarında genellikle taşıma (handling) işlemlerinde yoğun bir şekilde tutucular (gripper) kullanılmaktadır.
8. Bölüm Gripper Kontrolü 8. Bölüm: Gripper Kontrolü 8.1. Tutucular (Grippers) Endüstriyel robot uygulamalarında genellikle taşıma (handling) işlemlerinde yoğun bir şekilde tutucular (gripper) kullanılmaktadır.
Sistem Nasıl Çalışıyor: Araç İzleme ve Filo Yönetim Sistemi
 arvento Araç Takip ve Filo Yönetim Sistemleri ile araçlarınızı 7 gün 24 saat on-line ve geçmişe yönelik olarak izleyebilir, hızlarını, izlemiş oldukları güzergahı, duraklama yaptıkları yerleri uzaktan
arvento Araç Takip ve Filo Yönetim Sistemleri ile araçlarınızı 7 gün 24 saat on-line ve geçmişe yönelik olarak izleyebilir, hızlarını, izlemiş oldukları güzergahı, duraklama yaptıkları yerleri uzaktan
Konik ve Kavisli yüzey Tornalamada izlenecek işlem sırası şu şekildedir
 Konik ve Kavisli yüzey Tornalamada izlenecek işlem sırası şu şekildedir 1- Tornalanacak parça çizilir 2- Translate komutu ile punta deliğine gelecek nokta 0,0,0 koordinatına taşınır 3- Tezgah seçimi yapılır
Konik ve Kavisli yüzey Tornalamada izlenecek işlem sırası şu şekildedir 1- Tornalanacak parça çizilir 2- Translate komutu ile punta deliğine gelecek nokta 0,0,0 koordinatına taşınır 3- Tezgah seçimi yapılır
Uzaktan Eğitim Uygulama ve Araştırma Merkezi
 JAVA PROGRAMLAMA Öğr. Gör. Utku SOBUTAY İÇERİK 2 Java da Fonksiyon Tanımlamak Java da Döngüler Java da Şart İfadeleri Uygulamalar Java da Fonksiyon Tanımlamak JAVA DA FONKSİYON TANIMLAMAK 4 Fonksiyonlar;
JAVA PROGRAMLAMA Öğr. Gör. Utku SOBUTAY İÇERİK 2 Java da Fonksiyon Tanımlamak Java da Döngüler Java da Şart İfadeleri Uygulamalar Java da Fonksiyon Tanımlamak JAVA DA FONKSİYON TANIMLAMAK 4 Fonksiyonlar;
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Tek Setli, Tek Çýkýþlý, Çok Fonksiyonlu Hýz Ölçer
 Tek li, Tek Çýkýþlý Hýz Ölçer TCS37-100.S TCS37-100 Timer&Counter&Speed Tek li, Tek Çýkýþlý, Çok Fonksiyonlu Hýz Ölçer 6 dijit LED Display (Yeþil veya Kýrmýzý), 8mm dijit boyu Ýki ayrý çarpým faktörü(00.0001...
Tek li, Tek Çýkýþlý Hýz Ölçer TCS37-100.S TCS37-100 Timer&Counter&Speed Tek li, Tek Çýkýþlý, Çok Fonksiyonlu Hýz Ölçer 6 dijit LED Display (Yeþil veya Kýrmýzý), 8mm dijit boyu Ýki ayrý çarpým faktörü(00.0001...
8. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II. Öğr.Gör. Hakan YILMAZ. hakanyilmaz@karabuk.edu.tr
 8. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II Öğr.Gör. Hakan YILMAZ hakanyilmaz@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler QUERYSTRING KOLEKSIYONU... 3 FORM
8. HAFTA KBT204 İNTERNET PROGRAMCILIĞI II Öğr.Gör. Hakan YILMAZ hakanyilmaz@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler QUERYSTRING KOLEKSIYONU... 3 FORM
ACCESS CONTROL PROFESSIONAL KULLANIM KILAVUZU
 >> ACCESS CONTROL PROFESSIONAL KULLANIM KILAVUZU INFOMET Güvenlik Sistemleri Perpa Ticaret Merkezi A Blok Kat:12 No:1865 34384 Okmeydanı, İstanbul Tel: 0 (212) 320 08 80 pbx Faks: 0 (212) 320 11 07 http://www.infomet.com.tr
>> ACCESS CONTROL PROFESSIONAL KULLANIM KILAVUZU INFOMET Güvenlik Sistemleri Perpa Ticaret Merkezi A Blok Kat:12 No:1865 34384 Okmeydanı, İstanbul Tel: 0 (212) 320 08 80 pbx Faks: 0 (212) 320 11 07 http://www.infomet.com.tr
Endüstri 4.0 ve Nesnelerin Interneti
 Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0, teknolojilerin ve değer zinciri organizasyonları kavramlarının kolektif bir bütünüdür. (http://www.endustri40.com/endustri-tarihine-kisa-bir-yolculuk)
Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0 ve Nesnelerin Interneti Endüstri 4.0, teknolojilerin ve değer zinciri organizasyonları kavramlarının kolektif bir bütünüdür. (http://www.endustri40.com/endustri-tarihine-kisa-bir-yolculuk)
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
Doğru Adaptor soket kutuplaması.
 1. Tanıtım Next YE-11G WiFi Bridge satın aldığınız için teşekkür ederiz. Bu portatif cihaz ile, IP Kamera ve internet teknolojilerini kullanan Ethernet RJ45 portlu cihazların kablosuz ağlara kolayca erişimi
1. Tanıtım Next YE-11G WiFi Bridge satın aldığınız için teşekkür ederiz. Bu portatif cihaz ile, IP Kamera ve internet teknolojilerini kullanan Ethernet RJ45 portlu cihazların kablosuz ağlara kolayca erişimi
AOSB 2017 EĞİTİM PROGRAMI
 Eğitimin Konusu : Makro Excel Eğitim Tarihi : 04-05-10-11-12 Mayıs 2017 Eğitim Hedef Kitlesi : Excel kulllanıcıları arasında pratiklik ve hız kazanmış, Excel fonksiyonları, Veri Analizi araçlarını kullanma
Eğitimin Konusu : Makro Excel Eğitim Tarihi : 04-05-10-11-12 Mayıs 2017 Eğitim Hedef Kitlesi : Excel kulllanıcıları arasında pratiklik ve hız kazanmış, Excel fonksiyonları, Veri Analizi araçlarını kullanma
EĞİTİM PLANI Başlangıç Saati : 09:30 Öğle Arası : 12:00 13:00 Bitiş Saati : 17:00 Her 50 dk. 10 dk. mola
 BOĞAZİÇİ YAZILIM/UNIGRAPHICS UG NX CAM Geçiş Eğitimi Eğitmen : Melih DİZDARD EĞİTİM PLANI Başlangıç Saati : 09:30 Öğle Arası : 12:00 13:00 Bitiş Saati : 17:00 Her 50 dk. 10 dk. mola OPERATION NAVIGATOR
BOĞAZİÇİ YAZILIM/UNIGRAPHICS UG NX CAM Geçiş Eğitimi Eğitmen : Melih DİZDARD EĞİTİM PLANI Başlangıç Saati : 09:30 Öğle Arası : 12:00 13:00 Bitiş Saati : 17:00 Her 50 dk. 10 dk. mola OPERATION NAVIGATOR
İŞLEM SAYISI BELLİ OLAN DÖNGÜLER
 DÖNGÜLER GİRİŞ Bilgisayarın ismi her ne kadar bilgiyi saymaktan gelse de aslında bilgisayar programlar ile gerçek anlamını bulmaktadır. Program, bu bölüme kadar anlatılanlar işlemlerin sıralı olarak ve
DÖNGÜLER GİRİŞ Bilgisayarın ismi her ne kadar bilgiyi saymaktan gelse de aslında bilgisayar programlar ile gerçek anlamını bulmaktadır. Program, bu bölüme kadar anlatılanlar işlemlerin sıralı olarak ve
OTOMATİK KAPI KONTROL CİHAZI
 OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
1 RUBY HAKINDA 1 Ruby nin Gelişim Hikayesi 1 Neden Ruby? 1 Neden Bu Kadar Popüler? 2
 İÇİNDEKİLER VII İÇİNDEKİLER 1 RUBY HAKINDA 1 Ruby nin Gelişim Hikayesi 1 Neden Ruby? 1 Neden Bu Kadar Popüler? 2 2 RUBY KURULUMU 3 Windows İçin Ruby Kurulumu 3 Ubuntu ve Debian İçin Ruby Kurulumu 6 Mac
İÇİNDEKİLER VII İÇİNDEKİLER 1 RUBY HAKINDA 1 Ruby nin Gelişim Hikayesi 1 Neden Ruby? 1 Neden Bu Kadar Popüler? 2 2 RUBY KURULUMU 3 Windows İçin Ruby Kurulumu 3 Ubuntu ve Debian İçin Ruby Kurulumu 6 Mac
DVP-01PU POZĐSYONLAMA MODÜLÜ
 DVP-01PU POZĐSYONLAMA MODÜLÜ DVP-01PU DVP-01PU pozisyonlama modülüdür. Bu modül ile bir servonun pozisyonlaması gerçekleştirilebilir. Kabiliyetleri ise 200 KHz line dirver çıkışı ile 3 farklı tipte A/B
DVP-01PU POZĐSYONLAMA MODÜLÜ DVP-01PU DVP-01PU pozisyonlama modülüdür. Bu modül ile bir servonun pozisyonlaması gerçekleştirilebilir. Kabiliyetleri ise 200 KHz line dirver çıkışı ile 3 farklı tipte A/B
Döngüler - Loops 4/13/2011. ENF-102 Jeoloji Sayaç kontrollü bir döngüdeki temel öğeler. Sayaç (counter) Kontrollü Döngüler.
 Kontrollü Döngüler.") Giriş Döngüler - Loops Bir ifade kümesinin tekrarlanması, yani birden fazla çalıştırılması işlemine döngü (loop) dendiği programlamaya giriş kısmında belirtilmişti. Bu derste döngülerin C programlama dilinde
Giriş Döngüler - Loops Bir ifade kümesinin tekrarlanması, yani birden fazla çalıştırılması işlemine döngü (loop) dendiği programlamaya giriş kısmında belirtilmişti. Bu derste döngülerin C programlama dilinde
Donanımlar Hafta 1 Donanım
 Donanımlar Hafta 1 Donanım Donanım Birimleri Ana Donanım Birimleri (Anakart, CPU, RAM, Ekran Kartı, Sabit Disk gibi aygıtlar, ) Ek Donanım Birimleri (Yazıcı, Tarayıcı, CD-ROM, Ses Kartı, vb ) Anakart (motherboard,
Donanımlar Hafta 1 Donanım Donanım Birimleri Ana Donanım Birimleri (Anakart, CPU, RAM, Ekran Kartı, Sabit Disk gibi aygıtlar, ) Ek Donanım Birimleri (Yazıcı, Tarayıcı, CD-ROM, Ses Kartı, vb ) Anakart (motherboard,
Programlanabilir Devreler
 Programlanabilir Devreler Testbench & Simülasyon İçerik Tasarlamış olduğumuz sayısal sistemlerin fonksiyonel olarak istenildiği gibi gerçekleştirdiğini doğrulamak gerekir. Verilog ve VHDL gibi donanım
Programlanabilir Devreler Testbench & Simülasyon İçerik Tasarlamış olduğumuz sayısal sistemlerin fonksiyonel olarak istenildiği gibi gerçekleştirdiğini doğrulamak gerekir. Verilog ve VHDL gibi donanım
Exper Style Kolay Kullanım Kılavuzu
 Kolay Kullanım Kılavuzu Hakkında Bu kolay kullanım kılavuzu, sisteminizi başlatmak için kullanacağınız bir referans niteliğindedir. Daha detaylı bilgiyi cihaz kutusundan çıkan Device Drivers & Utilities
Kolay Kullanım Kılavuzu Hakkında Bu kolay kullanım kılavuzu, sisteminizi başlatmak için kullanacağınız bir referans niteliğindedir. Daha detaylı bilgiyi cihaz kutusundan çıkan Device Drivers & Utilities
Sınav tarihi : Süre : 60 dak. a) strstr b) strchr c) strcat d) strcpy e) strlen. a) b) d) e) 0
 strstr b) strchr c) strcat d) strcpy e) strlen. a) b) d) e) 0") Selçuk Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü Bitirme Sınavı Test Soruları Adı soyadı : Öğrenci no : Sınav tarihi : 01.06.2017 Süre : 60 dak. 1. t değişkeni hakkında aşağıdakilerden
Selçuk Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü Bitirme Sınavı Test Soruları Adı soyadı : Öğrenci no : Sınav tarihi : 01.06.2017 Süre : 60 dak. 1. t değişkeni hakkında aşağıdakilerden
Data View ve Variable View
 SPSS i çalıştırma 0 SPSS İlk Açılışı 1 Data View ve Variable View 2 Değişken Tanımlama - 1 3 Değişken Tanımlama - 2 4 Boş Veri Sayfası 5 Veri Girişi - 1 6 Veri Girişi - 2 7 Dosya Kaydetme 1 2 3 8 File
SPSS i çalıştırma 0 SPSS İlk Açılışı 1 Data View ve Variable View 2 Değişken Tanımlama - 1 3 Değişken Tanımlama - 2 4 Boş Veri Sayfası 5 Veri Girişi - 1 6 Veri Girişi - 2 7 Dosya Kaydetme 1 2 3 8 File
Döngüler - Loops 4/9/2010. ENF-102 Jeoloji Giriş. Sayaç kontrollü bir döngüdeki temel öğeler. Sayaç (counter) Kontrollü Döngüler.
 Kontrollü Döngüler.") Giriş Döngüler - Loops Bir ifade kümesinin tekrarlanması, yani birden fazla çalıştırılması işlemine döngü (loop) dendiğiğ programlamaya giriş ş kısmında belirtilmişti. Bu derste döngülerin C programlama
Giriş Döngüler - Loops Bir ifade kümesinin tekrarlanması, yani birden fazla çalıştırılması işlemine döngü (loop) dendiğiğ programlamaya giriş ş kısmında belirtilmişti. Bu derste döngülerin C programlama
Control Box Tuş İşlevleri
 Control Box Tuş İşlevleri Power switch= > Kontrol gücünü açıp kapatır. Start button=> Programı uygular ve robotu çalıştırır.program sürekli çalıştırılır. Stop button=> Robotu hemen durdurur.servo kapanmaz.
Control Box Tuş İşlevleri Power switch= > Kontrol gücünü açıp kapatır. Start button=> Programı uygular ve robotu çalıştırır.program sürekli çalıştırılır. Stop button=> Robotu hemen durdurur.servo kapanmaz.
4. HAFTA ENM 108 BİLGİSAYAR DESTEKLİ TEKNİK RESİM. Yrd.Doç.Dr. İnan KESKİN. inankeskin@karabuk.edu.tr
 4. HAFTA ENM 108 BİLGİSAYAR DESTEKLİ TEKNİK RESİM Yrd.Doç.Dr. İnan KESKİN inankeskin@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler Tablosu Koordinat Kullanımı...
4. HAFTA ENM 108 BİLGİSAYAR DESTEKLİ TEKNİK RESİM Yrd.Doç.Dr. İnan KESKİN inankeskin@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 İçindekiler Tablosu Koordinat Kullanımı...
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
Widows un çalışmasında birinci sırada önem taşıyan dosyalardan biriside Registry olarak bilinen kayıt veri tabanıdır.
 Registry: Windows un bütün ayarlarının tutulduğu bir veri tabanıdır. Widows un çalışmasında birinci sırada önem taşıyan dosyalardan biriside Registry olarak bilinen kayıt veri tabanıdır. Win.3x sistemlerinde
Registry: Windows un bütün ayarlarının tutulduğu bir veri tabanıdır. Widows un çalışmasında birinci sırada önem taşıyan dosyalardan biriside Registry olarak bilinen kayıt veri tabanıdır. Win.3x sistemlerinde
Yeni Ü ye Test Sistemi Teknik Bilgilendirme
 Yeni Ü ye Test Sistemi Teknik Bilgilendirme İÇERİK I. GİRİŞ... 2 II. MATERYAL... 2 III. ERİŞİM BİLGİLERİ... 3 IV. PRO-MARK UYGULAMA KURULUMU... 3 PC Konfigürasyon... 3 Kurulum Adımları... 4 V. RISK INFORMER
Yeni Ü ye Test Sistemi Teknik Bilgilendirme İÇERİK I. GİRİŞ... 2 II. MATERYAL... 2 III. ERİŞİM BİLGİLERİ... 3 IV. PRO-MARK UYGULAMA KURULUMU... 3 PC Konfigürasyon... 3 Kurulum Adımları... 4 V. RISK INFORMER
500 VDC'ye kadar gerilimler. 70 C'de 1,5 A Lütfen şekil 1'de gösterildiği üzere gerilim oranı azalmasını değerlendirin
 EtherNet/IP Integrated Ethernet switch 10 Mbps / 100 Mbps supported 2 x male M12, 4-pin, D-coded, Ethernet-Fieldbus connection Kuvvetlendirilmiş cam elyaf gövde Darbeye ve titreşime karşı test edilmiştir
EtherNet/IP Integrated Ethernet switch 10 Mbps / 100 Mbps supported 2 x male M12, 4-pin, D-coded, Ethernet-Fieldbus connection Kuvvetlendirilmiş cam elyaf gövde Darbeye ve titreşime karşı test edilmiştir
User [Şirket adını. LTr Kullanım Kılavuzu. yazın]
![User [Şirket adını. LTr Kullanım Kılavuzu. yazın]](/thumbs/32/15547306.jpg "User [Şirket adını. LTr Kullanım Kılavuzu. yazın]") User [Şirket adını LTr Kullanım Kılavuzu yazın] İçindekiler Giriş... 4 Teknik Özellikler... 5 Ölçüler... 6 Cihaz Konnektör Bağlantıları... 7 Besleme Konnektörü Bağlantısı... 8 Haberleşme Konnektörü Bağlantısı...
User [Şirket adını LTr Kullanım Kılavuzu yazın] İçindekiler Giriş... 4 Teknik Özellikler... 5 Ölçüler... 6 Cihaz Konnektör Bağlantıları... 7 Besleme Konnektörü Bağlantısı... 8 Haberleşme Konnektörü Bağlantısı...
MX2-CJ2M ETHERNET/IP HABERLEŞMESİ
 MX2-CJ2M ETHERNET/IP HABERLEŞMESİ İÇİNDEKİLER Giriş 3G3AX-MX2-EIP-A ve montajı 3G3MX2 invertör parametre ayarları Cx-Programmer da PLC ye IP atama Network Configurator ile tag tanımlama CJ2M-CPU33 konfigürasyonu
MX2-CJ2M ETHERNET/IP HABERLEŞMESİ İÇİNDEKİLER Giriş 3G3AX-MX2-EIP-A ve montajı 3G3MX2 invertör parametre ayarları Cx-Programmer da PLC ye IP atama Network Configurator ile tag tanımlama CJ2M-CPU33 konfigürasyonu
AUTOCAD: Çizim Limitleri
 AUTOCAD: Çizim Limitleri Command: limits Specify lower left corner or [ON/OFF] : 0,0 Specify upper right corner :1000,1000 Çizimde kullanılacak AutoCAD uzayının sınırlarını
AUTOCAD: Çizim Limitleri Command: limits Specify lower left corner or [ON/OFF] : 0,0 Specify upper right corner :1000,1000 Çizimde kullanılacak AutoCAD uzayının sınırlarını