PIC MCU ile UYGULAMALAR-II
|
|
|
- Eser Ekren
- 7 yıl önce
- İzleme sayısı:
Transkript

1 PIC MCU ile UYGULAMALAR-II ADC-DAC Uygulamaları Paralel LCD Uygulamaları Seri LCD Uygulamaları Step Motorlar DC Motorlar Servo Motorlar YRD.Doc..Dr.BÜLENT ÇOBANOĞLU

2 ADC: Anolog-Digital Çevirici ADC, girişlerine uygulanan akım, gerilim, sıcaklık gibi analog büyüklükleri değerleri ile orantılı olarak çıkışında digital sinyale çeviren devredir. PIC6F877a da 8 kanallı ADC modülü bulunmaktadır. bit çözünürlüğe sahiptir. 2^=24 Vref+=5v,Vref-=v 5/24= Her volt değişiminde bit in dijitinde değişim olur. DAC ise, girişindeki sayısal değerlere karşılık analog bir gerilim veya akım üreten devredir. ADC lerde olduğu gibi bit çözünürlüğü, adım büyüklüğü gibi bir çok kavram DAC ler içinde geçerlidir.
3 Bir MCU da ADC birimi yoksa ne olur? MCU da ADC birimi yoksa (Örneğin 6F84 gibi) ADC83 entegresini kullanarak dönüştürme yapabilirsiniz. ADC83, Üç kontrol hattı, DO (data out), CLK (clock), _CS (chip seçim) kullanır.
4 Orta Ölçekli PIC ADC Yapısı
5 PIC ADC Çevrim Algoritması. Hangi kanalları A/D çevrimine açacağınızı ve çevrim sonucunu nasıl yazdırmak istediğinizi göz önünde bulundurarak ADCON yazmacının değerini ayarlayın. 2. Çevrimi açmak ve bu çevrimi hangi kanaldan(a/d çevrimini birkaç kanaldan aynı anda yapamazsınız) yapacağınızı ve çevrim periyodunu ayarlamak için ADCON yazmacına gerekli değerleri ayarlayın. 3. ADCON ın Go/Done bitini yaparak çevirme işlemini başlatın. 4. Go/Done bitinin değerini almasını bekleyin. Bu değerin olması işlemin bittiğinin, sonucunda ADRESH ve ADRESL ye yazıldığını belirtir. 5. Sonuç yazılma ayarlarınızı göz önünde bulundurarak sonucu değerlendirebilirsiniz. Sonucu bit üzerinden değerlendirmeniz gerekir. Elde edilen sonucun kaç volta karşılık geldiğini şu şekilde formülize edebiliriz. ((ADRESH:ADRESL) x (Vref+ - Vref-) ) / 23 Örnek olarak sonuç değerimiz olsun, referans olarakta Vdd ve Vss yi seçtiğimizi varsayarsak Vo=(426x(5-)) / 23 den yaklaşık olarak V=2. volt sonucunu elde ederiz. Veya Vin=Vo*adım buyuklugu Adım buyuklugu=5/2^=4.88
6 PIC6f877 ADC yapısı PIC6F877 de 8 kanallı ADC modülü bulunmaktadır, bu modüllerden bitlik giriş alınabilir. Bu kanallar PIC6F877 de ise PORTA ve PORTE de bulunur. ADC modül işlemlerinde 4 önemli kaydedici vardır. Bunlar ADCON, ADCON, ADRESH, ADRESL dir. ADCON lar A/D çevriminin kontrolünü yönetirler. ADRES ler ise sonuçların yazıldığı yazmaçlardır.

7 I/O Portları: Analog/Digital Seçimi 6F877 de 8 tane bitlik A/D çevirme kanalı bulunur. A / D kanalları için RA4 hariç diğer A ve E portları kullanılır. A/D çevirme işlemi 4 adet kaydediciyle yapılmaktadır. Aşağıda ilgili register lar ve adresleri gösterilmiştir. ADRESH ADRESL ADCON ADCON xe x9e xf x9f ; A / D sonuç kaydedicisi (high register) ; A / D sonuç kaydedicisi (low register) ; A / D kontrol kaydedicisi ; A / D kontrol kaydedicisi ADFM biti dönüştürme işlemi sonunda bitlik sayının formatını belirler.: Sayı sağa kaydırılır.: Sayı sola kaydırılır. PCFG3 PCFG bitleri A/D portlarının durumunu belirler. Tümü yapılırsa bu durumda 8 tane analog kanal seçilmiş olur ve her kanalın referans gerilimi VDD olarak ayarlanır. Dr. Bülent ÇOBANOĞLU
8 I/O Portları: Analog/Digital Seçimi :ADCON ADCON, PORTA ve PORTE portlarını dijital veya analog giriş-çıkış olarak ayarlamaya yarar. Default olarak bu portlar analogtur ADCON kaydedicisine ilgili değerler yüklenerek bütün pinler digital veya analog işlemler için ayarlanabilir. Ayrıntılı bilgi için lütfen datasheet e ve ileride anlatacağımız ADC konusuna göz atınız.
9 I/O Portları: Analog/Digital Seçimi : ADFM biti ve ADRESL-ARESH
10 I/O Portları: Analog/Digital Seçimi : ADCON TAD:Bir bitlik dönüşüm süresidir. bitlik dönüşüm için TAD süresi çeker.
) Bu yazmaçın 7 ve 6. bitleri TAD değerini ayarlamaya yarar. TAD, A/D çevrim periyodudur.")
11 PIC6f877 ADC yapısı CHS2, CHS, CHS : Kanal seçme bitleridir. GO/DONE : ADC çevrimini başlatan bittir, çevrim bitince olur. ADON : ADC birimini açan bittir. ADCS, ADCS : Frekans kaynağı seçim bitleridir (ADCS: ADCS (Bit özel isimleri)) Bu yazmaçın 7 ve 6. bitleri TAD değerini ayarlamaya yarar. TAD, A/D çevrim periyodudur. Bir çevrim için minimum TAD süresi gerekir. TAD süresi için dört seçenek vardır. = Fosc/2 = Fosc/8. TAD süresi minimum.6 mikro saniye olmalıdır. Bunun 4 Mhz likte 2 veya 8, 2 MHZ likte ise hepsi seçilebilir. ADFM: ADRES kaydedicisi formatını belirler ADCS2 : Yardımcı frekans seçme biti. PCFG3, PCFG2, PCFG, PCFG : Portların görevlerini ayarlayan bitler.
12 ADC Örnek Vo= Vin*4/5.*256
 { TRISA = xff; // PORTA input TRISD = x; // portd çıkış TRISB = ; // PORTB çıkış PORTC=; PORTD=; ADCON=b; // AN ler analog, ADFM=,ADcs2= ADCON=b; //fosc/4, AN2, GODONE=, ADON= for(;;){")
13 ADC Örnek Uygulama ADFM biti #include <xc.h> void main() { TRISA = xff; // PORTA input TRISD = x; // portd çıkış TRISB = ; // PORTB çıkış PORTC=; PORTD=; ADCON=b; // AN ler analog, ADFM=,ADcs2= ADCON=b; //fosc/4, AN2, GODONE=, ADON= for(;;){ ADCONbits.GO=; // çevrime başla while (ADCONbits.nDONE); //bitene kadar bekle PORTB = ADRESL; // ilk 8 bit PORTB e gönder PORTD = ADRESH; //Son iki biti (MSB leri) PORTD e gönder } }
14 Soru: Referans gerilimlerini farklı seçtiğinizde elde edilen sonuçları bir önceki örnek değerleri ile karşılaştırınız

15 DAC Uygulaması Birçok DAC de ADC lerde olduğu gibi çevrime başlama çevrimin bitmesini bekleme gibi kontrol işlemleri yoktur. 8 btilik bir DAC, maksimum 2^8=256 adet farklı sayısal değerin analog karşılığını üretebilir. #include <pic.h> const unsigned char deger[]={28,92,238,255, 238,92,28,64,7,,7,64,28}; void main() { unsigned char x; TRISB=; while() { for (x=;x<2;x++) PORTB= deger[x]; } }
 karşılaşılmaktadır. Karakter tabanlı dot matrix LCD (paralel/seri) ve grafik LCD olmak üzere iki çeşit LCD vardır.")
16 LCD UYGULAMASI LCD (Liquid Crystal Display) göstergeli mikro denetleyici uygulamaları ile hayatımızın her alanında (cep telefonları, fotokopi makineleri, otomobiller, kameralar, oyuncaklar, güvenlik sistemleri gibi) karşılaşılmaktadır. Karakter tabanlı dot matrix LCD (paralel/seri) ve grafik LCD olmak üzere iki çeşit LCD vardır. LED gösterge ile sadece sayısal değerler ve sınırlı sayıdaki karakterler gösterilebilmektedir. Buna karşılık LCD göstergeler ile her türlü yazı ve sayısal değeri göstermek mümkündür. LCD ler çeşitli firmalar tarafından üretilmesine rağmen kontrolleri standartlaşmıştır. Tüm LCD göstergelerde yetki (Enable), oku yaz (R/W), ve kaydedici seçim (RS) uçları ile veri giriş hatları vardır. Bağlantı şekillerine göre LCD göstergeler seri ve paralel olarak sınıflandırılmaktadırlar. Paralel LCD ler ucuz oluşları nedeniyle çok yaygın olarak kullanılmaktadır.
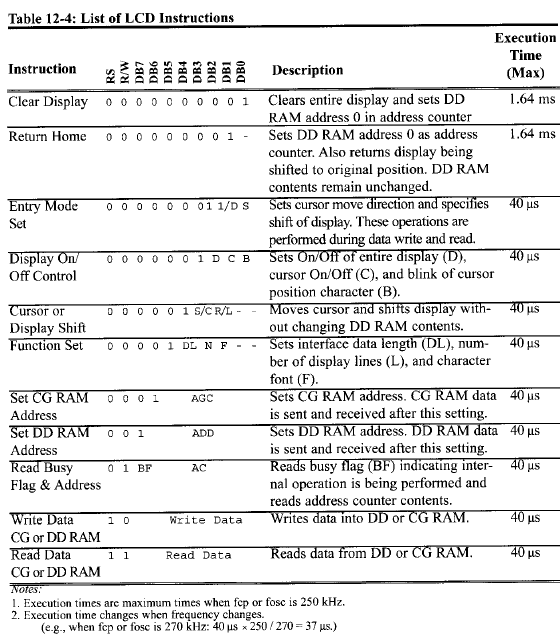
17 LCD Kontrol İşlemleri LCD göstergeye gönderilen veri ya bir komut kodu veya bir karakterdir. Şekil 3. de LCD göstergeye yazma işlemine ait zamanlama diyagramı görülmektedir. RS ucu düşük seviyeye çekilirse yapılacak işlem bir kontrol işlemidir. Eğer yüksek seviyede tutulursa gönderilen bir karakterdir. LCD ye her 8 bitlik veri, önce yüksek değerlikli 4 - bit, sonra düşük değerlikli 4 - bit olmak üzere iki defada gönderilir. LCD ekrana veriler ASCII karakter kodları gönderilerek gösterilirler. Mesela ekrana göstermek için, sıfırın ASCII kodu olan 48 i göndermek gerekir. RW= ise LCD ye yazma, RW= ise LCD den okuma işlemi yapılıyordur. LCD ekrana veri yazmak için aşağıdaki adımlar izlenir; Veri, veri yoluna konulur, RS ucu lojik yapılarak, yazma işleminin komut olmadığı belirtilir, RW ucu lojik yapılır, E ucuna lojik şeklinde bir saat (clock) darbesi verilir. LCD ekrana komut yazmak için ise aşağıdaki adımlar izlenir; Komut, veri yoluna konulur, RS ucu lojik yapılarak, yazma işleminin komut olduğu bildirilir, RW ucu lojik yapılır, E ucuna lojik şeklinde bir saat (clock) darbesi verilir.
- 4 RS Komut/Veri Seçici Komut, : Veri: 5 R/W Oku/Yaz LCD ye yaz, : LCD den oku: 6")
18 LCD Bacak Bağlantıları LCD dış dünyaya 4 pinlik bir konnektör ile bağlanır. Tablo da LCD nin pin (bacak) numaraları ve her pinin görevi verilmiştir. Pin No Pin ismi Fonksiyon Açıklama Vss Toprak/Şase GND 2 Vdd Kaynak / Power V 5+ 3 Vee Kontrast /Parlaklık V 5 - ( 2)- 4 RS Komut/Veri Seçici Komut, : Veri: 5 R/W Oku/Yaz LCD ye yaz, : LCD den oku: 6 E Enable /Etkinleştirme LCD ye veri gönderme için aktif yapılır. E bacağının lojik den lojik a geçişi ile LCD ye veri transfer olur. Bacağın lojik dan lojik e geçmesi ile LCD den durum. okunabilir 7 D I/O Data LSB 8 D I/O Data 9 D2 I/O Data D3 I/O Data D4 I/O Data 2 D5 I/O Data 3 D6 I/O Data 4 D7 I/O Data MSB
 kısmı boştur ve yazılabilirdir.")
19 Karakter gösterimi Karakter LCD lerin oluşturabileceği her bir karakter ise karakter LCD nin özel CGROM hafızasına kaydedilmişlerdir. ASCII karakter uyumu olan karakterlerin listesi şekil de görülebilmektedir. Şekilde görüleceği üzere CGROM un ilk 8 karakterlik (x..xf) kısmı boştur ve yazılabilirdir. Bu kullanıcıya tabloda olmayan karakterleri (CGRAM ile) kendisinin tanımlamasına imkan tanır.
20 LCD
21 LCD nin kullanıma hazır hale getirilmesi

22 PIC- Assembly: 8 bitlik LCD ye yazı yazmak LIST P=6F84 INCLUDE "P6F84.INC«SATIRYAZ MOVLW 'B' CALL DATAYAZ MOVLW 'U' CALL DATAYAZ MOVLW 'L' CALL DATAYAZ MOVLW 'E' CALL DATAYAZ MOVLW 'N' CALL DATAYAZ MOVLW 'T' CALL DATAYAZ RETURN CBLOCK H'C' SAY,SAY2 ENDC CLRF PORTB BSF STATUS,5 CLRF TRISA CLRF TRISB BCF STATUS,5 BASLA MOVLW X; DISPLAY TEMIZLE CALL KOMUTYAZ MOVLW X3 ;8 BITLIK BAGLANTI, SATIR CALL KOMUTYAZ MOVLW XC ;EKRANI AÇ,KURSORU KAPAT, YANIP SONME YOK CALL KOMUTYAZ CALL SATIRYAZ DUR BEKLE MOVLW H'FF' MOVWF SAY DON MOVLW H'FF' MOVWF SAY2 GOTO DUR DON2 KOMUTYAZ BCF PORTA, ;RS= İLE KOMUT YAZ MOVWF PORTB BSF PORTA, ;E= CALL BEKLE BCF PORTA, ;E= RETURN DATAYAZ DECFSZ SAY2,F GOTO DON2 DECFSZ SAY,F GOTO DON RETURN END BSF PORTA, ;RS= İLE VERI YAZ MOVWF PORTB BSF PORTA, ;E= CALL BEKLE BCF PORTA, ;E= RETURN
23 Devre Şeması
24 PIC- C: 8 bitlik LCD ye yazı yazmak #include <xc.h> #define RS RB #define RW RB #define E RB2 void lcdkomut (unsigned char); void lcdveri (char); void bekle(unsigned int); void main() { TRISD=; TRISB=; E=; bekle(25); lcdkomut(x38);//2 satır 5*7 matrix bekle(25); lcdkomut(xe); //display ve kursor açık bekle(5); lcdkomut(x);//ekranı temizle bekle(5); lcdkomut(x6);//kursor sağa kaysın bekle(5); lcdkomut(x86);//. satır,6.sıra bekle(5); lcdveri('s'); bekle(5); lcdveri('a'); bekle(5); lcdveri('u'); } void lcdkomut(unsigned char k) { PORTD=k; RS=; RW=; E=; bekle(); E=; } void lcdveri(char veri) { PORTD=veri; RS=; RW=; E=; bekle(); E=; } void bekle(unsigned int sn) { unsigned int i,j; for (i=; i<sn; i++) for (j=; j<35; j++); }

25 PIC- C: Hazır fonksiyon kullanarak 4 bitlik LCD ye yazı yazmak Kod Değişikliği: Hitech klasörünün altındaki LCDemo klasörü içerisindeki «lcd.c» dosyasındaki PORTD yi PORTB, TRISD yi de TRISB ye şeklinde değiştirmeliyiz. lcd.h içindeki fonksiyonlar; lcd_init)(: lcd yi hazırla lcd_clear)(: lcd yi temizle lcd_goto)p(: belirtilen pozisyona git lcd_write)(: Karakter gönder lcd_puts)(: String gönder lcd_putch)(: karakter gönder

26 Seri LCD MCU ya seri olarak sadece bir kablo ile bağlanırlar ve normal olarak RS232 seri iletişim protokolüne göre çalışırlar. Fiyatları paralel LCD ye göre daha pahalıdır. LCD2 VDD RXD VSS MILFORD-2X6-BKP

27 Basılan tuşu seri LCD de gösteren uygulama Not: printf bazı lite derleyici sürümlerinde çalışmıyor o zaman bu örnek atlanabilir!
28 MOTOR TİPLERİ DC MOTOR: Kutuplarına uygulanan DC gerilim motorun dönmesini sağlar, kutup uçları ters çevrildiğinde motor dönüş yönü de değişir. SERVO MOTOR: Verilen duty cycle periyotlarına göre açısal bir dönüş yapar. STEP MOTOR: Girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yaparlar. Her bir pals, rotoru bir adım döndürmektedir.
29 Step motor Step motorlar, diğer motorlardan farklı olarak motor bobinlerine uygulanan elektrik palsi (pulse) ile döndürülürler. Her bir pals, rotoru bir adım döndürmektedir. (Adımın derece değeri, motorun adım sayısına bağlıdır) bu palsler, adım olarak adlandırıldıklarından bu motor türüne adım (step) motor denir. Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır. Sabit mıknatıslı kutuplar hareketli kısımda yer alır. DC gerilimin uygulandığı sargıların bulunduğu kısım stator, dönen kısım ise rotor olarak isimlendirilir. Step motorlar, bir turdaki adım sayısı ile anılırlar. Örneğin 3 adımlık bir step motorun bir tam dönüşünde (tur) 3 adım bulunur. Zaten ismini de buradan alır. Buna göre bir adımın açısı; 36 / 3 =,2 derecedir. Bu değer, step motorun hassasiyetinin bir ölçüsüdür. Her bir adımda motorun döneceği açı derecesi motorun üzerinde yazar. Örneğin 7.5 derecelik (36º/48) step motor, bir tam turda 48 adım atar. Bir devirdeki adım sayısı yükseldikçe step motorun hassasiyeti yükselmektedir ancak buna paralel olarak maliyeti de artmaktadır. Step motorlar yarım adım modunda çalıştırıldıklarında hassasiyetleri daha da artar. Örneğin 3 adım / tur değerindeki bir step motor, yarım adım modunda çalıştırıldığında tur başına 6 adım yapacaktır. Bu da,2 dereceye oranla daha hassas olan,6 derecelik bir adım açısı anlamına gelir.
30 ÇALIŞMA PRENSİBİ /Kullanım Yerleri Step motora giriş palsi uygulandığı zaman belli bir miktar döner ve durur. Bu dönme miktarı motorun yapısına göre belli bir açı ile sınırlandırılmıştır. Step motorda rotorun dönmesi girişe uygulanan pals adedine bağlı olarak değişir. Girişe tek bir pals verildiğinde rotor tek bir adım hareket eder ve durur. Daha fazla pals uygulanınca pals adedi kadar adım hareket eder. Bütün step motorlarının çalışma prensibi bu şekildedir. Kullanım yerleri: Bant sürücüler, imalat tezgahları, printer (yazıcı), disket sürücüleri, teyp sürücüleri, hafıza işlemlerinde, tıbbi cihazlarda, makine tezgahlarında, dikiş makinelerinde, kameralarda, taksimetrelerde, kart okuyucularında, ayar ve kontrol tekniğinde, uzaktan kumanda göstergelerinde kullanılır. Sonuç olarak step motorlar; her türlü kontrol edilmiş hareket veya pozisyon gerekli olan yerlerde, dijital bilgileri mekanik harekete çeviren bir transduser olarak görev yapar.
31 Step motorların sürülmesi Bir step motor, tek fazlı, 2 faz tam adımlı ve 2 faz yarım adımlı olmak üzere farklı şekillerde sürülebilir. Bazı kaynaklarda unipolar step motorlar tek fazlı, bipolar motorlar ise 2 fazlı olarak adlandırılabilir. Bipolar iki yönlü beslenen anlamına gelir ve Bipolar step motor, iki yönde de akım akabilen motor demektir.
32 fazlı sürüm A B C D A 2 fazlı TAM adımlı sürüm A B C D 2 fazlı YARIM adımlı sürüm B C D YRD.DOC.Dr.BÜLENT ÇOBANOĞLU
33 Yarım (8) adımlı step motor sürümü
34 Yarım adımlı Soru: 2 dereceli ve 8 adımlı bir step motoru 8 derece hareket ettirmek için kaç sıralı adım yaptırmamız gerekir? Cevap:?
 B(B 3) (B2) D(B")
35 Step motoru yarım adım döndüren program A(B 4) B(B 3) (B2) D(B )
36 Step motoru RA a basınca sağa RA e basınca sola Döndüren program A(B 4) B(B 3) (B2) D(B )

37 2 tur sola 4 tur sağa dönen step motor uygulaması Öğr.Gör.Bülent Çobanoğlu
38 ? Çalışma Sorusu: Sürekli bir şekilde 2 tur sola 4 tur sağa dönen step motor uygulamasını C ile yapınız.
39 DC MOTOR DC Motor, doğru akım elektrik enerjisini mekanik enerjiye dönüştüren elektrik makinesidir. Herhangi bir iletkene doğru akım tatbik edildiğinde iletken, sabit bir manyetik alan oluşturur. DC motorlar, statorda oluşturulan sabit manyetik alanın rotorda oluşturulan sabit manyetik alanı itmesi ve çekmesi prensibine göre çalışır. Statorda kuzeygüney ekseninde oluşan sabit manyetik alana karşı, rotorda bu eksenden belli bir açıda kayık olarak yerleştirilen sargıda ikinci bir sabit manyetik alan oluşturulur.

40 DC MOTOR Step motorun aksine DC motorun hareketi süreklidir. Çoğu anakart üzerindeki küçük fanlarda, CPU soğutucuları üzerinde DC motor vardır. Küçük boyutları ve maliyetlerinin düşüklüğü tercih edilme sebepleridir. Kutuplarına uygulanan DC gerilim motorun dönmesini sağlar, kutup uçları ters çevrildiğinde motor dönüş yönü de değişir. Dönüş hızı doğrudan uçlarına uygulanan DC gerilimin büyüklüğü ile doğru orantılıdır. Fakat uygulamalarda genellikle PWM yöntemi ile dönüş hızı ayarlanır.
41 DC MOTOR DC motorun hızı üç faktöre bağlıdır: Yüke, Voltaja, Akıma PWM (Pals Genişlik Modülasyonu) ile, ayarlanabilir bir frekans ve periyotta sayısal sinyal üretilebilir. Üretilen dalganın genişliği değiştikçe DC motor hızı da değişir, genişlik artarsa hız da artar (Duty Cycle) Sarımlara akım gitmez ve dönüş durur Motor sarımlarına elektrik gider ve rotor döner,
42 Donanımsal Olarak PWM Programlama.PR2 kaydedicisine PWM peryodunu yaz, 2.CCPRL ye duty cycle değerini ayarla 3.CCP pinlerini çıkış yap 4.T2CON kaydedicisinin prescaler değerini ayarla 5.TMR2 kaydedicisini temizle 6.CCPCON kaydedicisini ayarla ve (DCB2:DCB) 7. Timer2 yi başlat
 { PORTD=x; PORTB=x; TRISD=xFF; // GIRIS TRISB=x; // PORTB çıkıs RB2=; // A köprüsü seçiliyor RB3=;")
43 DC MOTOR #include <xc.h> void main(void) { PORTD=x; PORTB=x; TRISD=xFF; // GIRIS TRISB=x; // PORTB çıkıs RB2=; // A köprüsü seçiliyor RB3=; for(;;) { if(rd5) //ileri { RB=; RB=; } if(rd6) // Geri { RB=; RB=; } if(rd7) // Dur { RB=; RB=; } } }
44 DC MOTOR PWM ile DC Motor Kontrolü #include <xc.h> //#define btn RD7; void bekle(int); void main() { TRISD=x8; TRISB=xFD; while() { if ( RD7 == ) //%25 DC { RB=; bekle(25); RB=; bekle(75); } else { //%5 DC RB=; bekle(5); RB=; bekle(5); } } } void bekle(int sn) { unsigned int i,j; for (int i=; i<=275;i++) for (int j=; i<=sn;j+ +); }
45 Servo MOTOR Servo motorlar genel itibari ile içerlerinde bir DC motor ve şaft konum bilgisi devresi barındırırlar. Bu devre şaftın kaç derece döndüğünün algılanmasında kullanılır. Servo motorlar 2ms periyotlu, ms den 2ms e kadar değişen duty cycle lı PWM sinyali ile sürülürler. Verilen duty cycle periyotlarına göre servo motorun -8 derece aralığı arasında alacakları değerler yanda gösterilmiştir. Burada sinyal verilirken örneğin,5ms ile ms arası 9 a bölünerek istenilen açıya gidilebilir. Model uçak, araba ve robotik uygulamalarda yaygın olarak kullanılır
 { TRISB =x; // PORTB cikis TRISD=xFF; while() { if(rd5)// Derece Dön { for(;;){ RB = ; DelayUs(25);DelayUs(25); DelayUs(25);DelayUs(25);//ms bekle RB = ; DelayMs(9); if(rd6 RD7) break;")
46 #include <xc.h> #include "delay.h" void main() { TRISB =x; // PORTB cikis TRISD=xFF; while() { if(rd5)// Derece Dön { for(;;){ RB = ; DelayUs(25);DelayUs(25); DelayUs(25);DelayUs(25);//ms bekle RB = ; DelayMs(9); if(rd6 RD7) break; } } if(rd6) //9 Derece Dön { for(;;){ RB = ; DelayUs(25);DelayUs(25); DelayUs(25);DelayUs(25); DelayUs(25);DelayUs(25); RB = ; DelayMs(8); DelayUs(25);DelayUs(25); if(rd5 RD7) break; } } if(rd7) //8 Derece Dön { for(;;){ RB = ; DelayMs(2); RB = ; DelayMs(8); if(rd5 RD6) break; } } }} Servo MOTOR
PIC UYGULAMALARI. Öğr.Gör.Bülent Çobanoğlu
 PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
ADC: Anolog-Digital Çevirici
 ADC: Anolog-Digital Çevirici ADC, girişlerine uygulanan akım, gerilim, sıcaklık gibi analog büyüklükleri değerleri ile orantılı olarak çıkışında digital sinyale çeviren devredir. PIC16F877a da 8 kanallı
ADC: Anolog-Digital Çevirici ADC, girişlerine uygulanan akım, gerilim, sıcaklık gibi analog büyüklükleri değerleri ile orantılı olarak çıkışında digital sinyale çeviren devredir. PIC16F877a da 8 kanallı
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI
 PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
PIC MCU ile UYGULAMALAR
 PIC MCU ile UYGULAMALAR Gecikme Programları TMRO Gecikmesi 7 Segment Göstergeler Sayaç Örnekleri Trafik Sinyalizasyonu ADC-DAC Uygulamaları Kesmeler ve Uygulamaları Tuş Takımı (Keypad) Uygulamaları Paralel
PIC MCU ile UYGULAMALAR Gecikme Programları TMRO Gecikmesi 7 Segment Göstergeler Sayaç Örnekleri Trafik Sinyalizasyonu ADC-DAC Uygulamaları Kesmeler ve Uygulamaları Tuş Takımı (Keypad) Uygulamaları Paralel
İstanbul Teknik Üniversitesi IEEE Öğrenci Kolu
 Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
LCD (Liquid Crystal Display )
") LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
BÖLÜM 4 KAREKTER LCD ve ADC İŞLEMLERİ
 BÖLÜM 4 KAREKTER LCD ve ADC İŞLEMLERİ 4.1) Hi-Tech te Karekter LCD İşlemleri Şekil-37 de bir örneği görülen karakter LCD ler dışarıya bilgi aktarmak için kullanılan en yaygın birimlerdendir. Genel itibari
BÖLÜM 4 KAREKTER LCD ve ADC İŞLEMLERİ 4.1) Hi-Tech te Karekter LCD İşlemleri Şekil-37 de bir örneği görülen karakter LCD ler dışarıya bilgi aktarmak için kullanılan en yaygın birimlerdendir. Genel itibari
LCD (Liquid Crystal Display)
") LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
IŞIĞA YÖNELEN PANEL. Muhammet Emre Irmak. Mustafa Kemal Üniversitesi Mühendislik Fakültesi. Elektrik-Elektronik Mühendisliği Bölümü
 IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
PIC TABANLI, 4 BASAMAKLI VE SER
 PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
Deney No Deney Adı Tarih. 3 Mikrodenetleyici Portlarının Giriş Olarak Kullanılması / /201...
 3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
Program Kodları. void main() { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }
 { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }") Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
PIC 16F877 nin kullanılması
 PIC 16F877 nin kullanılması, dünyada kullanıma sunulmasıyla eş zamanlı olarak Türkiye de de uygulama geliştirenlerin kullanımına sunuldu., belki de en popüler PIC işlemcisi olan 16F84 ten sonra kullanıcılara
PIC 16F877 nin kullanılması, dünyada kullanıma sunulmasıyla eş zamanlı olarak Türkiye de de uygulama geliştirenlerin kullanımına sunuldu., belki de en popüler PIC işlemcisi olan 16F84 ten sonra kullanıcılara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI
 PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
Komutların İşlem Süresi
 Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
DENEY-7. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-7 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ Doğada bulunan tüm sistemler analog düzendedir.
DENEY-7 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ Doğada bulunan tüm sistemler analog düzendedir.
Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk.
 HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
BÖLÜM 1: MİKRODENETLEYİCİLER
 V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
DENEY-1. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-1 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY-1-1: BİT YÖNLENDİRMELİ KOMUTLAR İLE PİNLERE DEĞER GÖNDERME AMAÇ: Mikrodenetleyici pinlerine
DENEY-1 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY-1-1: BİT YÖNLENDİRMELİ KOMUTLAR İLE PİNLERE DEĞER GÖNDERME AMAÇ: Mikrodenetleyici pinlerine
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
BÖLÜM 6 RS232 SERİ İLETİŞİM İŞLEMLERİ
 BÖLÜM 6 RS232 SERİ İLETİŞİM İŞLEMLERİ 6.1) Hi-Tech te RS232 Seri İletişim İşlemleri Mikrodenetleyiciler ile diğer mikrodenetleyiciler, cihazlar, bilgisayarlar arasında iletişim kurmak istenildiğinde kullanılan
BÖLÜM 6 RS232 SERİ İLETİŞİM İŞLEMLERİ 6.1) Hi-Tech te RS232 Seri İletişim İşlemleri Mikrodenetleyiciler ile diğer mikrodenetleyiciler, cihazlar, bilgisayarlar arasında iletişim kurmak istenildiğinde kullanılan
Deney 10: Analog - Dijital Dönüştürücüler (Analog to Digital Converters - ADC) Giriş
 Giriş") Deney 10: Analog - Dijital Dönüştürücüler (Analog to Digital Converters - ADC) Analog - Dijital Dönüştürücülerin ADC0804 entegre devresi ile incelenmesi Giriş Sensör ve transdüser çıkışlarında genellikle
Deney 10: Analog - Dijital Dönüştürücüler (Analog to Digital Converters - ADC) Analog - Dijital Dönüştürücülerin ADC0804 entegre devresi ile incelenmesi Giriş Sensör ve transdüser çıkışlarında genellikle
DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI
 AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU
 PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: dogan@neu.edu.tr Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: dogan@neu.edu.tr Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek
 Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1
 6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA UYGULAMA_05_01 UYGULAMA_05_01. Doç.Dr. SERDAR KÜÇÜK
 UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak
 LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
Yrd.Doç. Dr. Bülent ÇOBANOĞLU. Sakarya Üniversitesi, Teknoloji Fakültesi
 B Yrd.Doç. Dr. Bülent ÇOBANOĞLU Sakarya Üniversitesi, Teknoloji Fakültesi Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olması durumunda
B Yrd.Doç. Dr. Bülent ÇOBANOĞLU Sakarya Üniversitesi, Teknoloji Fakültesi Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olması durumunda
Assembler program yazımında direkt olarak çizgi ile gösterilmemesine rağmen ekranınız ya da kağıdınız 4 ayrı sütunmuş gibi düşünülür.
 BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ
 BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ 3.1) Hi-Tech te CCP İşlemleri Pic içerisinde dahili olarak bulunan CCP modülü Copture (yakalama), Compare (karşılaştırma) ve PWM bölümlerinin baş harflerinin
BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ 3.1) Hi-Tech te CCP İşlemleri Pic içerisinde dahili olarak bulunan CCP modülü Copture (yakalama), Compare (karşılaştırma) ve PWM bölümlerinin baş harflerinin
http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm Yrd.Doç. Dr.
 http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm B Yrd.Doç. Dr. Bülent ÇOBANOĞLU PIC MİKRODENETLEYİCİ VE AİLESİ PIC, Microchip firması tarafından üretilen,
http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm B Yrd.Doç. Dr. Bülent ÇOBANOĞLU PIC MİKRODENETLEYİCİ VE AİLESİ PIC, Microchip firması tarafından üretilen,
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK. PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü
 DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ
 DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI. öğrencilerine eğitimleri esnasında iş hayatında karşılaşabilecekleri kontrol işlemleri ve
 MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
BESLEME KARTI RF ALICI KARTI
 BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
16F84 ü tanıt, PORTB çıkış MOVLW h FF MOWF PORTB
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Örnek. int analogpin = 3; int val = 0; void setup() { Serial.begin(9600); } void loop() { val = analogread(analogpin); Serial.
 { Serial.begin(9600); } void loop() { val = analogread(analogpin); Serial.") Seri Port Ekranı Arduinoyu USB üzerinden bilgisayarımıza bağladığımızda aslında seri port bağlantısı yapmış oluyoruz. Bu seri port üzerinden hem bilgi alışverişi yapabilir hem de uç bağlantı noktasındaki,
Seri Port Ekranı Arduinoyu USB üzerinden bilgisayarımıza bağladığımızda aslında seri port bağlantısı yapmış oluyoruz. Bu seri port üzerinden hem bilgi alışverişi yapabilir hem de uç bağlantı noktasındaki,
Mikroişlemciler. Microchip PIC
 Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
7. Port Programlama. mikroc Dili ile Mikrodenetleyici Programlama Ders Notları -42- Şekil 2.1. Atmega16 mikrodenetleyici pin şeması
 7. Port Programlama Şekil 2.1. Atmega16 mikrodenetleyici pin şeması A, B, C ve D portları için Register yapıları benzer şekildedir. -42- 7.1. Port Yönlendirme Mikrodenetleyicinin A, B, C, D ve varsa diğer
7. Port Programlama Şekil 2.1. Atmega16 mikrodenetleyici pin şeması A, B, C ve D portları için Register yapıları benzer şekildedir. -42- 7.1. Port Yönlendirme Mikrodenetleyicinin A, B, C, D ve varsa diğer
ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI:
 ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI: Aduc841 geliştirme kartının genel görüntüsü aşağıda verilmiştir; RS232 ANALOG USB ÇIKIŞ ANALOG GİRİŞ POTLAR TEXT LCD EKRAN GÜÇ KAYNAĞI LEDLER
ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI: Aduc841 geliştirme kartının genel görüntüsü aşağıda verilmiştir; RS232 ANALOG USB ÇIKIŞ ANALOG GİRİŞ POTLAR TEXT LCD EKRAN GÜÇ KAYNAĞI LEDLER
Mikro denetleyicili Uygulama devresi bileşenleri
 Mikro denetleyicili Uygulama devresi bileşenleri Bir PIC mikro denetleyici ile uygulama gerçekleştirebilmek için ; Besleme devresi, Reset sinyali, Osilatör devresi, Uygulama devresi elemanlarına İhtiyaç
Mikro denetleyicili Uygulama devresi bileşenleri Bir PIC mikro denetleyici ile uygulama gerçekleştirebilmek için ; Besleme devresi, Reset sinyali, Osilatör devresi, Uygulama devresi elemanlarına İhtiyaç
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Dinleme ve anlamlandırma
 Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Ders Dinleme ve anlamlandırma Standart derslik teknolojileri, çoklu ortam araçları, projektör, bilgisayar DERS BİLGİLERİ Ders
Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Ders Dinleme ve anlamlandırma Standart derslik teknolojileri, çoklu ortam araçları, projektör, bilgisayar DERS BİLGİLERİ Ders
Alıcı Devresi; Sinyali şu şekilde modüle ediyoruz;
 Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
8051 Ailesi MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur çekirdeğinin temel özellikkleri aşağıda verilmiştir:
 8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI
 P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
EEM 419-Mikroişlemciler Güz 2017
 EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
5.Eğitim E205. PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628:
 5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR
 MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR Bülent ÖZBEK Örnek Program -1- B Portuna bağlı LED leri Yakma Bu programda PIC16F84 mikrodenetleyicisinin B portuna bağlı 8 adet LED in yanması sağlanacaktır. Bunu
MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR Bülent ÖZBEK Örnek Program -1- B Portuna bağlı LED leri Yakma Bu programda PIC16F84 mikrodenetleyicisinin B portuna bağlı 8 adet LED in yanması sağlanacaktır. Bunu
Bölüm 9 A/D Çeviriciler
 Bölüm 9 A/D Çeviriciler 9.1 AMAÇ 1. Bir Analog-Dijital Çeviricinin çalışma yönteminin anlaşılması. 2. ADC0804 ve ADC0809 entegrelerinin karakteristiklerinin anlaşılması. 3. ADC0804 ve ADC0809 entegrelerinin
Bölüm 9 A/D Çeviriciler 9.1 AMAÇ 1. Bir Analog-Dijital Çeviricinin çalışma yönteminin anlaşılması. 2. ADC0804 ve ADC0809 entegrelerinin karakteristiklerinin anlaşılması. 3. ADC0804 ve ADC0809 entegrelerinin
PIC Mikrodenetleyiciler. Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1
 PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı
 1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
WIRELESS TECHNOLOGIES Uygulama Notu. ARX-34 ve ATX-34 KULLANARAKDATA GÖNDERMEK VE ALMAK ÇN GEREKL YAZILIM ve DONANIM
 ARX-34 ve ATX-34 KULLANARAKDATA GÖNDERMEK VE ALMAK ÇN GEREKL YAZILIM ve DONANIM PSF-UN-0805 1 EYLÜL 2005 VERC DEVRES Yazılım aaıda verilmitir.yazılım PIC16F876 veya PIC16F876A için yazılmıtır. Baud rate
ARX-34 ve ATX-34 KULLANARAKDATA GÖNDERMEK VE ALMAK ÇN GEREKL YAZILIM ve DONANIM PSF-UN-0805 1 EYLÜL 2005 VERC DEVRES Yazılım aaıda verilmitir.yazılım PIC16F876 veya PIC16F876A için yazılmıtır. Baud rate
BSF STATUS,5 ;bank1 e geçiş CLRF TRISB ;TRISB=00000000 BCF STATUS,5 ;bank0 a geçiş
 +5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
+5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
8051 Ailesi MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur çekirdeğinin temel özellikkleri aşağıda verilmiştir:
 8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Biyomedikal Mühendisliği, Bölümü E-mail: dogan @neu.edu.tr Tel: 90 3922236464
 GERÇEK ZAMAN ENTEGRE DESTEKLİ PIC MİKROKONTROLÖR PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Biyomedikal Mühendisliği, Bölümü E-mail: dogan @neu.edu.tr Tel: 90 3922236464
GERÇEK ZAMAN ENTEGRE DESTEKLİ PIC MİKROKONTROLÖR PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Biyomedikal Mühendisliği, Bölümü E-mail: dogan @neu.edu.tr Tel: 90 3922236464
PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ
 PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ PIC16F84 UYGULAMA-1 İŞLEM BASAMAKLARI 1. PIC16F84 te A portunun ilk bitine (RA0) bağlı butona basıldığında,
PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ PIC16F84 UYGULAMA-1 İŞLEM BASAMAKLARI 1. PIC16F84 te A portunun ilk bitine (RA0) bağlı butona basıldığında,
EasyPic 6 Deney Seti Tanıtımı
 EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
T.C. RC SERVO MOTOR KONTROLÜ
 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
PIC16F877A nın Genel Özellikleri
 BÖLÜM 3 PIC16F877A nın Genel Özellikleri 3.1 Mikrodenetleyici Mimarisi 3.2 PIC16Fxxx Komut Seti 3.3 PIC16F877A Bellek Organizasyonu 3.4 Giriş/Çıkış Portları 3.5 STATUS ve TRIS Kaydedicileri 3.6 Kesme ve
BÖLÜM 3 PIC16F877A nın Genel Özellikleri 3.1 Mikrodenetleyici Mimarisi 3.2 PIC16Fxxx Komut Seti 3.3 PIC16F877A Bellek Organizasyonu 3.4 Giriş/Çıkış Portları 3.5 STATUS ve TRIS Kaydedicileri 3.6 Kesme ve
PIC MCU da Komutların İşlem Süresi
 PIC MCU da Komutların İşlem Süresi PIC lerde dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. Hazırlayan: Dr.Bülent ÇOBANOĞLU 1 PIC in Bir Komutu
PIC MCU da Komutların İşlem Süresi PIC lerde dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. Hazırlayan: Dr.Bülent ÇOBANOĞLU 1 PIC in Bir Komutu
3.2 PIC16F84 Yazılımı PIC Assembly Assembler Nedir?
 3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
2019
 Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
XC8 ile PİC uygulamaları
 XC8 ile PİC uygulamaları Modül tanıtımı : LCD kullanımı Öncelikle Lcd nedir ne değildir biraz tanımamız gerekiyor. LED göstergelerin fazla akım çekmesi ve kullanım zorluğu, son yıllarda LCD göstergelerin
XC8 ile PİC uygulamaları Modül tanıtımı : LCD kullanımı Öncelikle Lcd nedir ne değildir biraz tanımamız gerekiyor. LED göstergelerin fazla akım çekmesi ve kullanım zorluğu, son yıllarda LCD göstergelerin
A-PDF Merger DEMO : Purchase from www.a-pdf.com to remove the watermark T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
 A-PDF Merger DEMO : Purchase from www.a-pdf.com to remove the watermark T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ SES KONTROLLÜ ELEKTRONİK ANAHTAR
A-PDF Merger DEMO : Purchase from www.a-pdf.com to remove the watermark T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ SES KONTROLLÜ ELEKTRONİK ANAHTAR
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
Mikroişlemci Nedir? Mikrodenetleyici Nedir? Mikroişlemci iç yapısı Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
1. Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI
 SİNYAL KONTROL UYGULAMASI") DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
DENEY NO : 2 DENEY ADI : Sayısal Sinyallerin Analog Sinyallere Dönüştürülmesi
 DENEY NO : 2 DENEY ADI : Sayısal Sinyallerin Analog Sinyallere Dönüştürülmesi DENEYİN AMACI :Bir sayısal-analog dönüştürücü işlemini anlama. DAC0800'ün çalışmasını anlama. DAC0800'ı kullanarak unipolar
DENEY NO : 2 DENEY ADI : Sayısal Sinyallerin Analog Sinyallere Dönüştürülmesi DENEYİN AMACI :Bir sayısal-analog dönüştürücü işlemini anlama. DAC0800'ün çalışmasını anlama. DAC0800'ı kullanarak unipolar
Bölüm 19 FBs-4DA/2DA Analog Çıkış Modülü
 Bölüm 19 FBs-4DA/2DA Analog Çıkış Modülü FBs-4DA ve FBs-2DA FBs serisinin analog çıkış modülerlerindendir. Bunlar sırasıyla 4 ve 2 kanallı 14-bitlik D/A çıkış sağlarlar. Farklı jumper ayarları ile çeşitli
Bölüm 19 FBs-4DA/2DA Analog Çıkış Modülü FBs-4DA ve FBs-2DA FBs serisinin analog çıkış modülerlerindendir. Bunlar sırasıyla 4 ve 2 kanallı 14-bitlik D/A çıkış sağlarlar. Farklı jumper ayarları ile çeşitli
ARTOS7F1 ARIZA TESPİT CİHAZI VE PC OSİLOSKOP 7 FONKSİYON 1 CİHAZDA
 ARTOS7F1 ARIZA TESPİT CİHAZI VE PC OSİLOSKOP 7 FONKSİYON 1 CİHAZDA ARTOS7F1 Arıza Tespit Cihazı ve PC Osiloskop her tür elektronik kartın arızasını bulmada çok etkili bir sistemdir. Asıl tasarım amacı
ARTOS7F1 ARIZA TESPİT CİHAZI VE PC OSİLOSKOP 7 FONKSİYON 1 CİHAZDA ARTOS7F1 Arıza Tespit Cihazı ve PC Osiloskop her tür elektronik kartın arızasını bulmada çok etkili bir sistemdir. Asıl tasarım amacı
8 Ledli Havada Kayan Yazı
 8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2
 T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Mikrodenetleyici Eğitim seti
 DENEY 10. STEP (ADIMLI) MOTOR KONTROLU DENEYİ AMAÇ 1) Adımlı-motorun kontrolünü öğretmek, 2) Bir Adımlı-motorun maksimum dönme hızını göstermek. GEREKLİ MALZEME (1) Beti Eğitim Sistemi, (1) Adım motor
DENEY 10. STEP (ADIMLI) MOTOR KONTROLU DENEYİ AMAÇ 1) Adımlı-motorun kontrolünü öğretmek, 2) Bir Adımlı-motorun maksimum dönme hızını göstermek. GEREKLİ MALZEME (1) Beti Eğitim Sistemi, (1) Adım motor
SAYISAL ANALOG DÖNÜŞTÜRÜCÜ DENEYİ
 Deneyin Amacı: SAYISAL ANALOG DÖNÜŞTÜRÜCÜ DENEYİ Sayısal Analog Dönüştürücüleri (Digital to Analog Converter, DAC) tanımak ve kullanmaktır. Giriş: Sayısal Analog Dönüştürücüler (DAC) için kullanılan devrelerin
Deneyin Amacı: SAYISAL ANALOG DÖNÜŞTÜRÜCÜ DENEYİ Sayısal Analog Dönüştürücüleri (Digital to Analog Converter, DAC) tanımak ve kullanmaktır. Giriş: Sayısal Analog Dönüştürücüler (DAC) için kullanılan devrelerin
DENEY-6. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-6 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 TEXT LCD İLE VERİ GÖRÜNTÜLEME Mikrodenetleyicilerle bir sistem tasarlarken çoğu kez kullanılan
DENEY-6 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 TEXT LCD İLE VERİ GÖRÜNTÜLEME Mikrodenetleyicilerle bir sistem tasarlarken çoğu kez kullanılan
DENEY 6a- Dijital/Analog Çevirici (DAC) Devreleri
 Devreleri") DENEY 6a- Dijital/Analog Çevirici (DAC) Devreleri DENEYİN AMACI 1. Dijitalden Analog a çevrimin temel kavramlarının ve teorilerinin anlaşılması GENEL BİLGİLER Şekil-1 Şekil-1 de bir direnç ağıyla gerçekleştirilmiş
DENEY 6a- Dijital/Analog Çevirici (DAC) Devreleri DENEYİN AMACI 1. Dijitalden Analog a çevrimin temel kavramlarının ve teorilerinin anlaşılması GENEL BİLGİLER Şekil-1 Şekil-1 de bir direnç ağıyla gerçekleştirilmiş