Görüntü Restorasyonu. BMÜ-357 Sayısal Görüntü İşeme Yrd. Doç. Dr. İlhan AYDIN
|
|
|
- Bilge Yüce
- 8 yıl önce
- İzleme sayısı:
Transkript
1 Görüntü Restorasyonu BMÜ-357 Sayısal Görüntü İşeme Yrd. Doç. Dr. İlhan AYDIN

2 Görüntü İyileştirme (İmage restoration) Görüntü restorasyonu konusu, bir görüntünün oluşumu esnasında oluşabilen veri kayıplarını veya bozulmaları azaltma veya tamamen yok etme konularını kapsayan; önemli konulardan birisidir. Görüntüdeki verim kaybı (görüntünün görünme derecesinin düşürülmesi) gürültülerden kaynaklanır. Gürültü pikselin gerçek değerindeki sapmadır. Gürültü; hareket veya atmosferik kararsızlık nedeniyle meydana gelen bulanıklaşma veya resmi çekerken yanlış ışık etkisinden dolayı focus bulanıklaşması, kusursuz olmayan lenslerden kaynaklanan geometrik bozulma ve elektronik kaynaklardan gelen hatalar olarak verilebilir. Bu etkileri yok etmek için kullanılan görüntü iyileştirme yöntemlerini göreceğiz. Bu teknikler uzaysal domainde komşuluk ilişkili yöntemler veya frekans domeninde yapılan işlemlerdir. Görüntü iyileştirme yöntemleri bir görüntünün görünüşünü, görüntü derecesini aşağı düşüren bir matematik model kullanan görüntü iyileştirme süreci kullanarak geliştirme işlemidir.

3 f(x,y) Derece düşürme Sistem Modeli Filtre fonksiyonu h + g(x,y) n(x,y) Restorasyon filtreleri f (x,y) Uzaysal domande f(x,y) gibi bir görüntümüz ve h(x,y) gibi bir filtre fonksiyonumuz olsun. Bu h(x,y) fonksiyonuna derece düşürme fonksiyonu da denir. g(x,y) = f(x,y)*h(x,y) İşleminden elde edilen g(x,y) yeni görüntü, orijinal f(x,y) görüntüsüne göre derecesi düşürülmüş bir görüntüdür. Ancak bu görüntü hala tam bozuk bir görüntü değildir. Modelin tamamlanabilmesi için buna bir gürültü fonksiyonu n(x,y) eklemeliyiz. g(x,y) = f(x,y)*h(x,y) + n(x,y) Bu bağıntı uzaysal domainde, gürültüyü de göz önüne alan derece düşürme yöntemine göre sistemin modelidir.
 eklemeliyiz.")
4 Uzaysal alandaki modelde bulunan konvolusyon işlemi, frekans uzayındaki çarpıma eşdeğer olduğu için, frekans domainde derecesi düşürülmüş model aşağıdaki gibidir. Burada; G(i,j) = F(i,j).H(i,j) + N(i,j) G(i,j) = derecesi düşürülmüş görüntünün fourier dönüşümü. H(i,j) = Derece düşürme fonksiyonunun fourier dönüşümü F(i,j) = orjinal görüntünün fourier dönüşümü N(i,j) = eklenmiş gürültü fonksiyonunun fourier dönüşümü. Bu bağıntılara göre; görüntü restorasyonun amacının, h(x,y) veya H(i,j) ve n(x,y) veya N(i,j) fonksiyonlarını bulmak olarak açıklayabiliriz

5 Gürültü (Noise) Gürültü, görüntüyü kirleten ve görüntü kalitesini düşüren harici kaynaklarda oluşan etkidir. Gürültü bir görüntü içerisinde bir çok farklı kaynaklardan meydana gelebilir. Optik bir görüntüyü, sürekli bir elektriksel sinyale çeviren, sayısal görüntü elde etme süreci, sayısal görüntülerde gürültünün ilk ortaya çıktığı süreçtir. Süreçteki her adım ise doğal olaylardan dolayı dalgalanmalar meydana getirir ve bu pikselin gerçek parlaklık değerine bir tesadüfi sayı ekler. Eğer hangi adımda hangi tip gürültünün oluştuğu bilinebilseydi bunun temizlenmesi de sıfır hata ile gerçekleşebilirdi. Ancak bu durum pratikte mümkün değildir. Bunun için standart tanımlanmış bazı gürültülere göre işlem yapılacaktır. Bu gürültü örneklerinin en önemlileri; Tuz-Biber (Salt-pepper) gürültüsü Gaussian (normal) gürültü Uniform Gürültü

6 Gaussian Gürültü: Bir olasılık yoğunluk fonksiyonu ile karakterize edilen rastgele değişkenler Matlab fonksiyonu randn Rayleigh Gürültüsü: Matlab fonksiyonu z=a+sqrt(b*ln[1-u(0,1)])

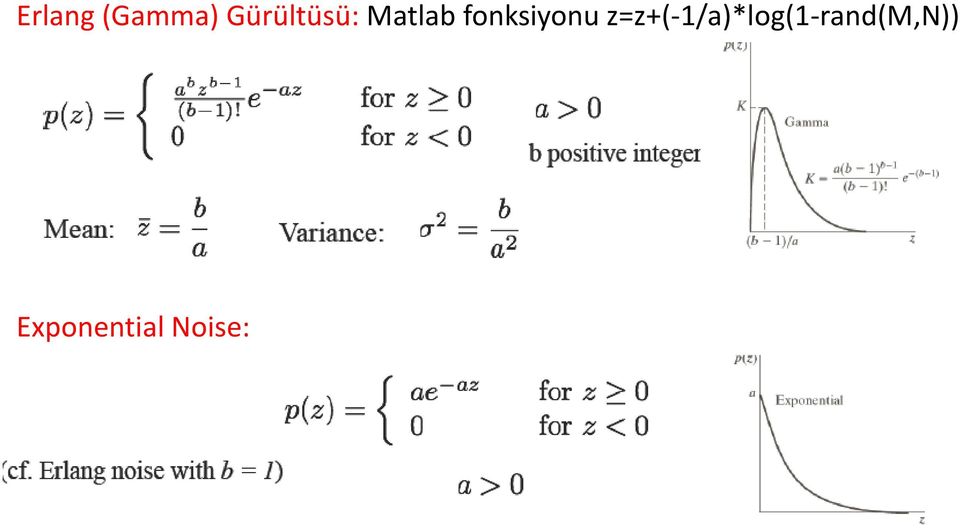
7 Erlang (Gamma) Gürültüsü: Matlab fonksiyonu z=z+(-1/a)*log(1-rand(m,n)) Exponential Noise:
8 Uniform Gürültü: Matlab fonksiyonu rand
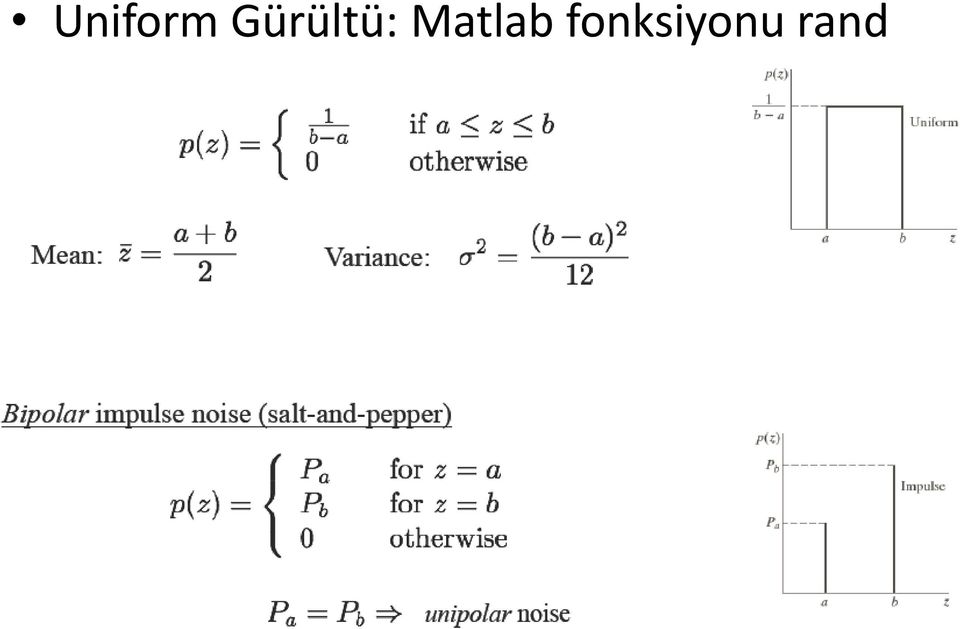


9 Bu gürültü tiplerinin dağılımının şekli, bir histogram olarak modellenebilir ve Şekil de görülmektedir. Normal dağılımı gösteren gaussian eğrisi, yatay eksenin ortasıdaki dikey sütüna göre ortalaması 0 olan varyansı 1 olan eğrisdir. Şekil a da gauss gürültü dağılımının çan şeklinde değiştiği görülmektedir. Bunun anlamı gürültünün gri seviye değerlerinin dağılım olasılığının şekildeki gibi olacağıdır. Şekil b de Uniform dağılımlarda, gürültünün gri seviyesi değerlerinin belirli bir aralık boyunca düzenli bir şekilde dağıldığı görülmektedir. Bu değer tüm aralık boyunca (0-255, 8 bit için) olabilir veya tüm aralığın küçük bir kesiti olabilir. Şekil c de bir tuz-biber (salt and pepper) dağılımı görülmektedir. Tuzbiber gürültü modelinde a ve b gibi sadece iki mümkün değer vardır ve her birisinin olasılığı 0.1 den daha düşüktür. Bundan daha büyük değerlerde gürültü görüntü üzerinde hakim duruma geçer.

10 Tuz - Biber Gürültüsü İmpulse gürültüsü veya Binary gürültü olarak tanımlanır. Bu gürültü görüntüde keskin dağılımlıdır. Görüntü üzerinde belirgin olarak siyah ve beyaz noktalar şeklindedir. Tuz biber modeli tipik olarak kameranın algılayıcılarındaki piksel elemanlarının çalışmalarındaki bozukluklardan, hatalı bellek bölgelerinden yada sayısallaştırma sürecindeki zamanlama hatalarından kaynaklanan gürültüleri modeller. 8 bitlik bir görüntü için tipik değerler biber için 0, tuz için 255 olarak alınabilir

11

12 Tuz-Biber gürültüsü Orijinal görüntü piksellerini gelişigüzel olarak siyah veya beyaz yapar. Matlabda; A= imnoise (b, salt & pepper, d); İle işlenir. Burada b orijinal görüntü, d ise tuz-biber gürültüsünün derecesidir. Default değeri 0.05 dir. D 0.1 den büyük olmamalıdır. >> b=imread('cameraman.tif'); >> imshow(b) >> c=imnoise(b,'salt & pepper'); >> imshow(c) >> d=imnoise(b,'salt & pepper',0.1); >> imshow(d)

13 Örnek: Tuz biber gürültüsü function R=tuzbiber(M,N,a,b) if nargin<=2 a=0.05; b=0.05; end if (a+b)>1 error('pa ve Pb toplami 1 den buyuk olamaz'); end R(1:M,1:N)=0.5; X=rand(M,N); c=find(x<=a); R(c)=0; u=a+b; c=find(x>a & X<=u); R(c)=1;
; end R(1:M,1:N)=0.")
14 Örnek: biber gürültüsü eklemek f=imread('cameraman.tif'); figure imshow(f) [M, N]= size(f) R = tuzbiber(m, N, 0.1, 0); c = find (R==0); gp = f; gp(c) = 0; figure imshow(gp)
![tif'); figure imshow(f) [M, N]= size(f) R](/docs-images/40/3693692/images/page_14.jpg "= tuzbiber(m, N, 0.")
15 Örnek: tuz gürültüsü eklemek f=imread('fig2.tif'); figure; imshow(f) [M, N]= size(f); R = tuzbiber(m, N, 0, 0.1); c = find (R==1); gs = f; gs(c) = 255; imshow(gs);
![tif'); figure; imshow(f) [M, N]=](/docs-images/40/3693692/images/page_15.jpg "size(f); R = tuzbiber(m, N, 0, 0.")
16 Gaussian Gürültüsü Gauss modeli doğal gürültü sürecini modellemek için kullanılan en genel yöntemdir. Bu yöntem özellikle görüntü elde etme sürecinde elektriksel olarak ortaya çıkan gürültüleri modellemek için kullanılır. Bu gürültü görüntüde gelişigzel dalgalanmalara sebep olur. Görüntü fonksiyonu I(x,y) ise ve N(x,y) de Gaussian gürültüsünü temsil ediyorsa; gürültülü görüntü; g= I+N İle ifade edilir. Matlabda Gaussian gürültüsü eklemek için; d=imnoise (g, 'gaussian',m,v) Şeklindedir. Burada M ortalama, V variance değerleridir. Default olarak M=0 V=0.01 alınır.
 ise ve N(x,y) de Gaussian gürültüsünü temsil ediyorsa; gürültülü görüntü; g= I+N İle ifade edilir.")
17 d=imnoise (g, 'gaussian',m,v) Orijinal Görüntü M=0, V=0.01 (default değerdir)

18 Periyodik Gürültü Eğer görüntü işaretinde periyodik olarak değişen nesneler var ise; (yani rastgele bir şekilde bozukluk yoksa örneğin görüntü üzerinde tekrar eden çubuk şeklinde nesneler varise); biz periyodik bir gürültü tarafından bozulmuş bir görüntü elde ederiz. Matlabdaki imnoise fonksiyonu ile böyle bir gürültü elde edemeyiz. Bunun için; >> t=imread('cameraman.tif'); >> s=size(t); t nin boyutunu s ye aktarıyor. >> [x,y]=meshgrid(1:s(1),1:s(2)); x,y boyutlu matris. >> p=sin(x/3+y/5)+1; sinüs >> imshow(p) >> k=(im2double(t)+p/2)/2; >> imshow(k)
; >> s=size(t); t nin boyutunu s ye aktarıyor. >> [x,y]=meshgrid(1:s(1),1:s(2)); x,y boyutlu matris.")


19 Periyodik gürültü ve gürültü eklenmiş orijinal resim.

20 Tuz-Biber, Gaussian ve Uniform gürültüler uzaysal doman filtreleri ile temizlenebilir. Bu uzaysal filtreler küçük sayıda (3x3.11x11) komşuluk ilişkisi ile çalışırlar. Fakat periyodik gürültüyü temizlemek için frekans domani filtrelerine ihtiyaç duyulur.
 komşuluk ilişkisi ile çalışırlar.")
21 Tuz-Biber Gürültüsünü Yok etme Tuz ve biber gürültüsü yüksek frekans bileşenli görüntüdür. Bunun için alçak geçiren filtreler kullanarak bu gürültü tipini yok edebiliriz veya azaltabiliriz. Bunun için bir ortalama filtre (Mean filtreleri görüntü kenarlarını ve detaylarını bulanıklaştırma dezavantajına sahiptirler - Aslında Mean filtreleri gauss ve uniform gürültü tiplerinde oldukça etkilidir. ) deneyebiliriz. Yapılması gereken, fspecial( average ) ile bir ortalama filtre matrisi oluşturup, bunu gürültülü görüntü ile konvoluse etmektir.
22 Varsayalım ki t, gürültülü görüntü osun, >> a=fspecial ( average ); >> b=fspecial ( average, [7,7]); >> tt= filter2(a, t); >> tt= filter2(b, t); Not: gürültü resmin üzerine çok etken ise; büyük boyutlu bir ortalama filtre kullandığımızda orijinal resimde oldukça bulanıklaşacaktır.
23 Median Filtreleme Median filtreleme, tuz-biber gürültüsünü yok etmek için çok uygundur. Medyan filtreler nonlineer uzaysal filtrelerdi. Maskeyi oluşturan boyuttaki resim piksel değerlerinin küçükten büyüğe sıralanıp ortadaki değeri merkez piksele atama işlemiydi. Örneğin; >>t=imread('cameraman.tif ); >> c=imnoise(t,'salt & pepper',0.1); >> imshow(c) >> d=medfilt2(c); >> imshow(d)
24 Maksimum ve minimum filtrelerde, tuz-biber (impulse) gürültüsünü yok edebilmek için kullanılan iki order filtresidir. Maksimum filtre sıralanmış piksel değerlerinin en büyüğünü seçerken, minimum filtre en küçük değeri seçer. Minimum filtreleme tuz tipi gürültünün hakim olduğu durumlarda kullanılırken maksimum filtreler biber tipi gürültü için en iyi sonucu vermektedir. Bu filtrelerin bu tip gürültüler için, en az detay kaybı ile birlikte çok iyi çalıştığını görmekteyiz. Pencere boyu büyüdükçe bilgi kaybının oranı gittikçe artmaktadır.
25 Örnek: Max filtre ile gürültü temizleme function sonuc=maksfiltre(a) figure,imshow(a),title('original IMAGE'); B=zeros(size(A)); modifya=padarray(a,[1 1]); x=[1:3]'; y=[1:3]'; for i= 1:size(modifyA,1)-2 for j=1:size(modifya,2)-2 window=reshape(modifya(i+x-1,j+y-1),[],1); B(i,j)=max(window); end end sonuc=uint8(b); figure,imshow(sonuc),title('image AFTER MAX FILTERING'); ORIGINAL IMAGE IMAGE AFTER MAX FILTERING Çalıştırılması:
26 Gaussian Gürültüsünün temizlenmesi Görüntünün ortalamasının alınması ile: Bazen Gauss gürültüsü ile bozulmuş sadece bir görüntü yerine, bunun çok farklı bir kopya olduğu ortaya çıkabilir. Örneğin uydu görüntülemede olduğu gibi; bir uydu birçok kez, aynı yerde birçok farklı görüntüler elde edecek şekilde geçebilir. Başka bir örnekte, bir mikroskoptan aynı görüntüye bakarak farklı image ler elde edilebilir. Böyle bir durumda Gauss gürültüsünü temizlemek için çok basit bir yaklaşım; sadece tüm görüntülerin ortalamasını almaktır. Elimizde, bizim görüntünün 100 kopyasının olduğunu varsayın. Bunların herbiride gürültülüdür. İ ci gürültülü görüntü; M+Ni dir. Burada M orijinal değerler matrisi, Ni, ortalaması 0 olan normal dağıtılmış gelişigüzel değerler matrisidir.l Biz bu görüntüleri kullanarak M ortalama görüntü matrisini bulabiliriz. Ni ler, normal dağılımlı ortalamları 0 olduğundan, tüm Ni lerin ortalamalarının 0 a çok yakın veya 0 olduğunu söyleyebiliriz. Bunun anlamı M = M dir.

27 Ortalama Filtre Mean filtreleri NxN penceresi içerisinde bir ortalama değer bulmaya çalışarak işlerler. Bunu yaparken görüntü üzerinde gezen bir kayan pencere yöntemi kullanırlar. Bu filtrelerin en basitlerinden birisi aritmetik mean filtresidir. Bu filtre pencere içerisindeki değerlerin arıtmetik ortalamasını bulurlar. Arıtmetik mean filtresi, görüntü içerisindeki yerel değişimleri yumuşatır yani aslında bu bir alçak geçiren filtredir. Bu, tüm katsayıları 1/N 2 ile çarpılarak, maskenin görüntü üzerine konvolusyonu ile elde edilebilir. Bu filtre gürültü etkilerini yok ederken görüntüyü bulanık bir hale getirmeye çalışacaktır. Maske boyutları büyüdükçe bulanıklaşma etkileri o kadar çok meydana gelmektedir. Bu tip filtreler en iyi şekilde gauss ve uniform gürültülerde çalışırlar. Eğer gauss gürültüsünün ortalaması 0 sa gürültü filtreleme ile 0 yapılabilir. Ancak bir miktarda görüntüde bulanıklaşmayı göz önüne alınız. Filtre boyutu 3x3 veya 5x5 olabilir.
28 Adaptif Filtreler Adaptif filtreler, maskesi altında gri ton değerlerine göre özelliklerini değiştirebilen filtre sınıfındandır. Onlar görüntü içinde bulundukları yere bağlı olarak, daha çok medyan filtre gibi, veya daha çok ortalama filtreler gibi hareket edebilirler. Filtre davranışının temel kriteri yerel karakteristiklerdir ve genelde yerel gri seviyesi istatistikleri ile ölçülürler. Minimum mean square error (MMSE) filtresi ise adaptive filtrelerine uygun bir örnektir. Nonlineer bir filtredir. Bu filtre yerel görüntü istatistiklerine göre değişim göstermektedir. MMSE filtresi en iyi sonuçlarını gauss ve uniform gürültülerde vermektedir. Aşağıda MMSE nin fazla kullanılan bir versiyonunun bağıntısı verilmektedir. σ 2 n = gürültü değişimi (Gürültü varyansı) σ 2 l = Lokal değişim (Yerel Varyans) (pencere faktörü altındaki) m l = Lokal ortalama (pencere faktörü altında ortalama). d(r,c) = Orijinal,filtrelenmemiş görüntü.
29 Görüntüdeki gürültüsüz durumlarda gürültü değişimi sıfıra eşittir, ve bu eşitlik geriye orjinal filtrelenmemiş bir görüntü döndürür. Görüntünün arka plan bölgelerinde, bozulmamış, orjinal görüntüdeki sabit değerlerde gürültü varyansı yerel varyansa eşit olur ve eşitlik bir mean filtresi üretir. Yerel varyansların, gürültü varyanslarından daha büyük oldukları bölgelerde eşitlik filtrelenmemiş veriye yakın bir değer döndürür. Bu, yüksek yerel varyansın yüksek detay (kenarlar) içerdiği durumlarda istenilen bir şeydir, adaptive filter burada detayları saklamaya çalışır. Genelde MMSE filtresi, yerel ortalamanın eklenmiş olduğu orjinal değerin bir kısmının filtrelenmemiş değerden farkının alınmış halini geri döndürür. Orjinal ve yerel ortalama miktarı orjinali değiştirmek için σ n 2 / σ i 2 gürültünün yerel varyansa oranını alır. Bu oranın artmasıyla penceredeki birincil gürültü önem kazanır ve filtre yerel ortalamayı döndürür. Oran azaldıkça yüksek yerel detaylar baskın olur ve orjinal filtrelenmemiş görüntüyü döndürür. Bu anlamda çalışarak MMSE filtresi kendisini görüntünün yerel özelliklerine uyarlar. Böylece gürültüleri yok ederken görüntü detaylarını saklamaya çalışır.
30 Matlab da adaptif Filtre kullanımı Matlabda adaptif filter uygumalarında genellikle wiener2 fonksiyonu kullanılır. >> t1=wiener2(t_ga); >> t2=wiener2(t_ga,[5,5]); >> t3=wiener2(t_ga,[7,7]); >> t4=wiener2(t_ga,[9,9]); Resimde gaussian gürültülü bir görüntünün (t_ga) değişik maske boyutlu adaptif filtre ile temizlenmesi görülmektedir. Alçak geçiren filtre olan adaptif filtrelemede kenarlarda bulanıklık eğilimi yok. Görüntüde yüksek frekans bileşenler etkilenmemiş.
31 Periyodik Gürültünün yok edilmesi Görüntü işareti periyodik olarak davranan bozucu büyüklükler var ise; (yani rastgele bir şekilde bozukluk yoksa- Görüntü üzerinde örneğin çubuk şeklinde nesneler varsa); biz periyodik bir gürültü tarafından bozulmuş bir görüntü oluştuğunu daha önceki kısımlarda açıklamıştık. Biz bu periyodik gürültüyü trigonometrik fonksiyonlar ile yaratıp orijinal görüntünün üzerine ekleyebiliriz. Bu aşağıda verilmektedir. >> a=imread('twins.tif'); >> b=rgb2gray(a); >> [x,y]=meshgrid(1:256,1:256); >> p=1+sin(x+y/1.5); >> tp=(double(b)/128+p)/8; >> imshow(tp); >> af=fftshift(fft2(tp)); >> imshow(mat2gray(log(1+abs(af)))); Burada dikkat edilecek husus şudur; spectrumda, merkezdeki beyazlık görüntünün ortalama değeridir, ve merkeze yakın ve çaprazlarındak beyazlıklar ise genelde periyodik gürültünün simetrik ortalama değerini ifade eder. Merkezde olmayan bu DC değerlerin anlamı periyodik gürültünün yüksek frekanslı (küçük mesafede, gri sevide büyük değişim etkisi) olduğudur. Gürültü DC değerleri merkeze ne kadar uzaksa, gürültünün periyodu o kadar küçüktür denir.
32 Bizim bu periyodik gürültüyü yok etmemiz için spekturm resmindeki merkezden uzak pikleri (periyodik gürültü dc değerini) yok etmemiz gerekir. Not: Matlab da elde edilen bir görüntü üzerindeki herhangibir noktanın x,y olarak koordinatlarını bilmek için; >> impixelinfo Komutunu çalıştırın. Resim üzerinde mousla durduğunuz noktanın (pikselin) koordinatları belirir. Buna göre spectrum resmindeki periyodik gürültünün pik yaptığı pikseller; satır sütun olarak (102,88) ve (156,170) olarak belirlenir. Bu noktaların merkeze olan mesafesi ise 49 olarak elde edilir. Bu koordinatlar bilindiğine göre bu pikleri yok etmek için iki önemli filtreleme kullanabiliriz.
33 Band söndüren (durduran) Filtreleme Band söndüren filtrelemenin temeli alt ve üst sınırlar içinde kalan frekans bileşenlerini yok eden bu bantın dışındaki frekans bileşenlerine etki etmeyen bir filtrelemedir. Buna göre bizim durdurulacak frekanslar için bandımız; 47 ve 51 yarıçaplı iki adet iç içe dairedir ( Yarıçapı 49 olan bir bant). Bunu Matlab da gerçeklemek için; >> z=sqrt((x-129).^2+(y-129).^2); >> z(102,88) ans = >> z(102,88) ans = >> br=(z < 47 z > 51); band geçiren filter >> tbr = af.* br; elemanter çarpma >> imshow(mat2gray(log(1+abs(tbr)))); >> s=ifft2(tbr); >> imshow(mat2gray((1+abs(s)))); Band durduran filtrenin, periyodik gürültüyü tamamen yok ettiği söylenemez. Çünkü periyodik gürültünün merkeze yakın önemli frekans bileşenleri yok edilmemiştir.
34 NOTCH (Çentik) FİLTRE Bu filtreleme işlemi, sadece seçilmiş satır ve sutunlardaki pikleri 0 yapar. >> tf(156,:)=0; >> tf(102,:)=0; >> tf(:,170)=0; >> tf(:,88)=0; Gürültünün büyük bir kısmı bu şekilde yok edilmiş olur.
35 İnverse Filtering (Ters Filtreleme) ile görüntü düzeltme Biz frekans domaninde filtreleme yapmak için: Görüntünün FFT si ile filtrenin fft sini çarpıyorduk. Bu durum Frekans domaininde konvolusyondu. X, görüntünün DFT si, F filtrenin DFT si Y ise elde edilen sonuç görüntünün DFT si idi. Eğer elimizde Y ve F var ise; orijinal görüntünün DFT sini bulmak için aşağıdaki işlemi yaparız. Buradan da İFFT ile X(x,y) uzaysal domaine dönülür. Bu durumda çok önemli bir sorun olabilir. Eğer F(i,j) Filtre eleman değerleri çok küçük ise bölüm X(i,j) görüntü FFT si istenildiği gibi çıkmaz. Bu sorunla 2 şekilde başedilir; 1- Bölüm teriminebir alçak geçiren filtre L(i,j) uygulanabilir. 2- Limitli Bölme İşlemi : bir d eşik değeri seçilir. Ve I F(i,j) I < d ise bölme yapılmaz.
36 Hareket bulanıklığını yok etme (Hareket netleştirme) Görüntüyü oluştururuken hareket etmesinden dolayı oluşan bulanıklıkları yok etmek için bir filtreleme düşünülebilir. Varsayalımki bir görüntü çekerken küçük miktarda bulanıklık oluşmuştur. >> bc=imread('board.tif'); >> bg=im2uint8(rgb2gray(bc)); >> b=bg(100:355,50:305); >> imshow(b) Bu resmi bulanıklaştırmak için; >> m=fspecial('motion',7,0); >> bm=imfilter(b,m); >> imshow(bm) Şimdi elimizde hareket bulanıklılığına sahip bir görüntü var. Bu görüntüyü netleştirmek için, Bulanık görüntünün FFT sinin, bulanıklığı yaratan filtrenin FFT sine bölünmesi gerekir. Bunun anlamı bizim işimiz; bulanıklık dönüşümüne karşılık gelen bir matris yaratmamızdır. >> m2=zeros(256,256); >> m2(1,1:7)=m; >> mf=fft2(m2);
37 Şimdi bu FFT ile görüntü FFT sini bölelim. >> bmi=ifft2(fft2(bm)./mf); Ancak bu mf filtresinin katsayıları küçük oduğundan görüntü düzeltme kötüdür. Bunun yerine aynı işlemi eşik değeri ile yaparsak (D=0.02) >> d=0.02; >> mf=fft2(m2) ;mf(find(abs(mf)<d))=1; >> bmi=ifft2(fft2(bm)./mf);
38 Ödev Teslim Tarihi: Bir görüntüye farklı gürültüler eklemek için aşağıdaki şekilde bir fonksiyon yazınız? S=gurultuekle(imge, M, N, a, b, gurultutipi) imge Gurultu eklenecek gray imge M imgenin satır sayısı N imgenin sütun sayısı a, b 0 ile 1 aralığında seçilen gürültü fonksiyonu parametreleridir.
Görüntü İşleme Ders-7 AND, NAND. % bir görüntüde küçük bir alanın kesilip çıkartılması. >> y=imread('headquarters-2and.jpg');
;") Görüntü İşleme Ders-7 AND, NAND % bir görüntüde küçük bir alanın kesilip çıkartılması. >> x=imread('headquarters-2.jpg'); >> y=imread('headquarters-2and.jpg'); >> x=rgb2gray(x); >> y=rgb2gray(y); >> imshow(y)
Görüntü İşleme Ders-7 AND, NAND % bir görüntüde küçük bir alanın kesilip çıkartılması. >> x=imread('headquarters-2.jpg'); >> y=imread('headquarters-2and.jpg'); >> x=rgb2gray(x); >> y=rgb2gray(y); >> imshow(y)
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk alp.erturk@kocaeli.edu.tr Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk alp.erturk@kocaeli.edu.tr Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Bölüm 6 Görüntü Onarma ve Geriçatma
 BLM429 Görüntü İşlemeye Giriş Bölüm 6 Görüntü Onarma ve Geriçatma Dr. Öğr. Üyesi Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak nesnelerin
BLM429 Görüntü İşlemeye Giriş Bölüm 6 Görüntü Onarma ve Geriçatma Dr. Öğr. Üyesi Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak nesnelerin
Frekans domain inde İşlemler. BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN
 Frekans domain inde İşlemler BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise,
Frekans domain inde İşlemler BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN Domain Dönüşümü Dönüşüm, bir sinyalin, başka parametrelerle ifade edilmesi şeklinde düşünülebilir. Ters dönüşüm ise,
MOD419 Görüntü İşleme
 MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
MOD419 Görüntü İşleme Ders Kitabı: Digital Image Processing by Gonzalez and Woods Puanlama: %30 Lab. %20 Vize %10 Quizes %40 Final %60 devam mecburiyeti Görüntü İşleme ye Giriş Görüntü İşleme Nedir? Özellikle
Görüntü İşleme Dersi Ders-8 Notları
 Görüntü İşleme Dersi Ders-8 Notları GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
Görüntü İşleme Dersi Ders-8 Notları GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
Hafta 5 Uzamsal Filtreleme
 BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
BLM429 Görüntü İşlemeye Giriş Hafta 5 Uzamsal Filtreleme Yrd. Doç. Dr. Caner ÖZCAN If the facts don't fit the theory, change the facts. ~Einstein İçerik 3. Yeğinlik Dönüşümleri ve Uzamsal Filtreleme Temel
Görüntü İşleme. Dijital Görüntü Tanımları. Dijital görüntü ise sayısal değerlerden oluşur.
 Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Görüntü İşleme Görüntü işleme, dijital bir resim haline getirilmiş olan gerçek yaşamdaki görüntülerin bir girdi resim olarak işlenerek, o resmin özelliklerinin ve görüntüsünün değiştirilmesidir. Resimler
Görüntü İşleme. K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI. Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003
 Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
Görüntü İşleme K.Sinan YILDIRIM Cenk İNCE Tahir Emre KALAYCI Ege Üniversitesi Bilgisayar Mühendisliği Bölümü 2003 İçerik Görüntü İşleme Nedir? Görüntü Tanımlamaları Görüntü Operasyonları Görüntü İşleme
GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI
 GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI NETLEŞTİRME/KESKİNLEŞTİRME FİLTRESİ (Sharpening Filter) Bu algoritma orjinal görüntüden, görüntünü yumuşatılmış halini çıkararak belirgin kenarların
GÖRÜNTÜ İŞLEME - (6.Hafta) GÖRÜNTÜ NETLEŞTİRME ALGORİTMALARI NETLEŞTİRME/KESKİNLEŞTİRME FİLTRESİ (Sharpening Filter) Bu algoritma orjinal görüntüden, görüntünü yumuşatılmış halini çıkararak belirgin kenarların
AKÜ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 GÖRÜNTÜ İŞLEME DERS-8 YARDIMCI NOTLARI -2018 Gri Seviye Dönüşümleri Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
GÖRÜNTÜ İŞLEME DERS-8 YARDIMCI NOTLARI -2018 Gri Seviye Dönüşümleri Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini dönüştürme işlemidir. Ancak, görüntü işleme operasyonları;
Hafta 7 Görüntü Onarma ve Geriçatma (Kısım 1)
") BLM429 Görüntü İşlemeye Giriş Hafta 7 Görüntü Onarma ve Geriçatma (Kısım 1) Yrd. Doç. Dr. Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak
BLM429 Görüntü İşlemeye Giriş Hafta 7 Görüntü Onarma ve Geriçatma (Kısım 1) Yrd. Doç. Dr. Caner ÖZCAN Gördüğümüz şeyler tek başlarına ne gördüğümüz değildir... Hislerimizin algı yeteneğinden ayrı olarak
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 6 Kenar, Köşe, Yuvarlak Tespiti Alp Ertürk alp.erturk@kocaeli.edu.tr KENAR TESPİTİ Kenar Tespiti Amaç: Görüntüdeki ani değişimleri / kesintileri algılamak Şekil bilgisi elde
Bilgisayarla Görüye Giriş Ders 6 Kenar, Köşe, Yuvarlak Tespiti Alp Ertürk alp.erturk@kocaeli.edu.tr KENAR TESPİTİ Kenar Tespiti Amaç: Görüntüdeki ani değişimleri / kesintileri algılamak Şekil bilgisi elde
RASGELE SÜREÇLER İ.Ü. ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ İLETİŞİM LABORATUVARI ARALIK, 2007
 RASGELE SÜREÇLER İ.Ü. ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ İLETİŞİM LABORATUVARI ARALIK, 007 1 Tekdüze Dağılım Bir X rasgele değişkenin, a ve b arasında tekdüze dağılımlı olabilmesi için olasılık yoğunluk
RASGELE SÜREÇLER İ.Ü. ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ İLETİŞİM LABORATUVARI ARALIK, 007 1 Tekdüze Dağılım Bir X rasgele değişkenin, a ve b arasında tekdüze dağılımlı olabilmesi için olasılık yoğunluk
GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME
 GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME DERS İÇERİĞİ Histogram İşleme Filtreleme Temelleri HİSTOGRAM Histogram bir resimdeki renk değerlerinin sayısını gösteren grafiktir. Histogram dengeleme
GÖRÜNTÜ İŞLEME HAFTA 4 DÖNÜŞÜMLER UZAYSAL FİLTRELEME DERS İÇERİĞİ Histogram İşleme Filtreleme Temelleri HİSTOGRAM Histogram bir resimdeki renk değerlerinin sayısını gösteren grafiktir. Histogram dengeleme
GÖRÜNTÜ İŞLEME - (5.Hafta)
") GÖRÜNTÜ İŞLEME - (5.Hafta) RESİM YUMUŞATMA (BULANIKLAŞTIRMA-BLURRING) FİLTRELERİ Görüntü işlemede, filtreler görüntüyü yumuşatmak yada kenarları belirginleştirmek için dijital filtreler kullanılır. Bu
GÖRÜNTÜ İŞLEME - (5.Hafta) RESİM YUMUŞATMA (BULANIKLAŞTIRMA-BLURRING) FİLTRELERİ Görüntü işlemede, filtreler görüntüyü yumuşatmak yada kenarları belirginleştirmek için dijital filtreler kullanılır. Bu
NEIGHBOURHOOD PROCESSING (KOMŞULUK İLİŞKİLİ İŞLEMLERİ- BÖLGESEL İŞLEMLER-UZAYSAL FİLTRELEME) BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr.
 BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr.") NEIGHBOURHOOD PROCESSING (KOMŞULUK İLİŞKİLİ İŞLEMLERİ- BÖLGESEL İŞLEMLER-UZAYSAL FİLTRELEME) BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN 1 KOMŞULUK İLİŞKİLİ İŞLEMLER (UZAYSAL FİLİTRELER) Noktasal
NEIGHBOURHOOD PROCESSING (KOMŞULUK İLİŞKİLİ İŞLEMLERİ- BÖLGESEL İŞLEMLER-UZAYSAL FİLTRELEME) BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN 1 KOMŞULUK İLİŞKİLİ İŞLEMLER (UZAYSAL FİLİTRELER) Noktasal
Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar
 BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
BLM429 Görüntü İşlemeye Giriş Bölüm 3 Görüntü İşleme ile İlgili Temel Kavramlar Dr. Öğr. Üyesi Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
Gri Seviye Dönüşümleri ve Uzaysal Filtreleme. BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN
 Gri Seviye Dönüşümleri ve Uzaysal Filtreleme BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini
Gri Seviye Dönüşümleri ve Uzaysal Filtreleme BMÜ-357 Sayısal Görüntü İşleme Yrd. Doç. Dr. İlhan AYDIN GRİ SEVİYE DÖNÜŞÜMLERİ Herhangi bir görüntü işleme operasyonu, görüntüdeki pikselin gri seviye değerlerini
RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI. Yrd. Doç. Dr. Emre ATILGAN
 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Yrd. Doç. Dr. Emre ATILGAN 1 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Olasılığa ilişkin olayların çoğunluğunda, deneme sonuçlarının bir veya birkaç yönden incelenmesi
RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Yrd. Doç. Dr. Emre ATILGAN 1 RASSAL DEĞİŞKENLER VE OLASILIK DAĞILIMLARI Olasılığa ilişkin olayların çoğunluğunda, deneme sonuçlarının bir veya birkaç yönden incelenmesi
Hatalar Bilgisi ve İstatistik Ders Kodu: Kredi: 3 / ECTS: 5
 Ders Kodu: 0010070021 Kredi: 3 / ECTS: 5 Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya 07.01.2015 1 Giriş 2 Giriş Matematiksel istatistiğin konusu yığın
Ders Kodu: 0010070021 Kredi: 3 / ECTS: 5 Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya 07.01.2015 1 Giriş 2 Giriş Matematiksel istatistiğin konusu yığın
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 25 Ekim
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ
 GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
GÖRÜNTÜ İŞLEME HAFTA 2 SAYISAL GÖRÜNTÜ TEMELLERİ GÖRÜNTÜ ALGILAMA Üç temel zar ile kaplıdır. 1- Dış Zar(kornea ve Sklera) 2- Koroid 3- Retina GÖRÜNTÜ ALGILAMA ---Dış Zar İki kısımdan oluşur. Kornea ve
İLERİ GÖRÜNTÜ İŞLEME Ders-1
 İLERİ GÖRÜNTÜ İŞLEME Ders- Elektromanyetik Spektrum Görünür Bölge 7 nm 4 nm Temel Kavramlar (Prof. Dr. Sarp ERTÜRK) 9/24/24 2 Hazırlayan: M. Kemal GÜLLÜ Sayısal İmge Gösterimi f x, y imgesi örneklendiğinde
İLERİ GÖRÜNTÜ İŞLEME Ders- Elektromanyetik Spektrum Görünür Bölge 7 nm 4 nm Temel Kavramlar (Prof. Dr. Sarp ERTÜRK) 9/24/24 2 Hazırlayan: M. Kemal GÜLLÜ Sayısal İmge Gösterimi f x, y imgesi örneklendiğinde
MATLAB. Temel işlemler, Vektörler, Matrisler DOÇ. DR. ERSAN KABALCI
 MATLAB Temel işlemler, Vektörler, Matrisler DOÇ. DR. ERSAN KABALCI İçerik Matlab Nedir? Matlab ın Kullanım Alanları Matlab Açılış Ekranı Matlab Programı İle Temel İşlemlerin Gerçekleştirilmesi Vektör İşlemleri
MATLAB Temel işlemler, Vektörler, Matrisler DOÇ. DR. ERSAN KABALCI İçerik Matlab Nedir? Matlab ın Kullanım Alanları Matlab Açılış Ekranı Matlab Programı İle Temel İşlemlerin Gerçekleştirilmesi Vektör İşlemleri
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
Digital Görüntü Temelleri Görüntü Oluşumu
 Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
Digital Görüntü Temelleri Görüntü Oluşumu Işık 3B yüzeye ulaşır. Yüzey yansıtır. Sensör elemanı ışık enerjisini alır. Yoğunluk (Intensity) önemlidir. Açılar önemlidir. Materyal (yüzey) önemlidir. 06 Kasım
SÜREKLĠ OLASILIK DAĞILIMLARI
 SÜREKLĠ OLASILIK DAĞILIMLARI Sayı ekseni üzerindeki tüm noktalarda değer alabilen değişkenler, sürekli değişkenler olarak tanımlanmaktadır. Bu bölümde, sürekli değişkenlere uygun olasılık dağılımları üzerinde
SÜREKLĠ OLASILIK DAĞILIMLARI Sayı ekseni üzerindeki tüm noktalarda değer alabilen değişkenler, sürekli değişkenler olarak tanımlanmaktadır. Bu bölümde, sürekli değişkenlere uygun olasılık dağılımları üzerinde
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Final
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Final Harris ve Moravec Köşe Belirleme Metotları Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü. Bilgisayarla Görme. Vize. İris Segmentation. Selçuk BAŞAK 08501008
 Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Vize İris Segmentation Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim program ve kaynak
Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Bölümü Bilgisayarla Görme Vize İris Segmentation Selçuk BAŞAK 08501008 Not: Ödevi hazırlamak için geliştirdiğim program ve kaynak
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop. Teorik Bilgi
, bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop. Teorik Bilgi") DENEY 8: PASİF FİLTRELER Deneyin Amaçları Pasif filtre devrelerinin çalışma mantığını anlamak. Deney Malzemeleri Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop.
DENEY 8: PASİF FİLTRELER Deneyin Amaçları Pasif filtre devrelerinin çalışma mantığını anlamak. Deney Malzemeleri Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop.
rasgele değişkeninin olasılık yoğunluk fonksiyonu,
 3.6. Bazı Sürekli Dağılımlar 3.6.1 Normal Dağılım Normal dağılım hem uygulamalı hem de teorik istatistikte kullanılan oldukça önemli bir dağılımdır. Normal dağılımın istatistikte önemli bir yerinin olmasının
3.6. Bazı Sürekli Dağılımlar 3.6.1 Normal Dağılım Normal dağılım hem uygulamalı hem de teorik istatistikte kullanılan oldukça önemli bir dağılımdır. Normal dağılımın istatistikte önemli bir yerinin olmasının
İmage segmentasyon (Görüntü Bölütleme)
") İmage segmentasyon (Görüntü Bölütleme) Segmantasyon (Bölütleme) Segmentasyon genellikle görüntü analizinin ilk aşamasıdır. Görüntü bölütleme, bir görüntüyü her biri içerisinde farklı özelliklerin tutulduğu
İmage segmentasyon (Görüntü Bölütleme) Segmantasyon (Bölütleme) Segmentasyon genellikle görüntü analizinin ilk aşamasıdır. Görüntü bölütleme, bir görüntüyü her biri içerisinde farklı özelliklerin tutulduğu
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
GÖRÜNTÜ İŞLEME UYGULAMALARI. Arş. Gör. Dr. Nergis TURAL POLAT
 GÖRÜNTÜ İŞLEME UYGULAMALARI Arş. Gör. Dr. Nergis TURAL POLAT İçerik Görüntü işleme nedir, amacı nedir, kullanım alanları nelerdir? Temel kavramlar Uzaysal frekanslar Örnekleme (Sampling) Aynalama (Aliasing)
GÖRÜNTÜ İŞLEME UYGULAMALARI Arş. Gör. Dr. Nergis TURAL POLAT İçerik Görüntü işleme nedir, amacı nedir, kullanım alanları nelerdir? Temel kavramlar Uzaysal frekanslar Örnekleme (Sampling) Aynalama (Aliasing)
Yrd. Doç. Dr. Saygın ABDİKAN Öğretim Yılı Bahar Dönemi
 Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2016-2017 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2016-2017 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER
 TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ İLETİŞİM LABORATUARI SAYISAL FİLTRELER
 SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ
 GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
GÖRÜNTÜ İŞLEME HAFTA 1 1.GİRİŞ GÖRÜNTÜ İŞLEME Hafta Hafta 1 Hafta 2 Hafta 3 Hafta 4 Hafta 5 Hafta 6 Hafta 7 Hafta 8 Hafta 9 Hafta 10 Hafta 11 Hafta 12 Hafta 13 Hafta 14 Konu Giriş Digital Görüntü Temelleri-1
Kümeler arası. Küme içi. uzaklıklar. maksimize edilir. minimize edilir
 Kümeleme Analizi: Temel Kavramlar ve Algoritmalar Kümeleme Analizi Nedir? Her biri bir dizi öznitelik ile, veri noktalarının bir kümesi ve noktalar arasındaki benzerliği ölçen bir benzerlik ölçümü verilmiş
Kümeleme Analizi: Temel Kavramlar ve Algoritmalar Kümeleme Analizi Nedir? Her biri bir dizi öznitelik ile, veri noktalarının bir kümesi ve noktalar arasındaki benzerliği ölçen bir benzerlik ölçümü verilmiş
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
Uzaysal Görüntü İyileştirme/Filtreleme. Doç. Dr. Fevzi Karslı fkarsli@ktu.edu.tr
 Uasal Görüntü İileştirme/Filtreleme Doç. Dr. Fevi Karslı karsli@ktu.edu.tr İileştirme Herhangi bir ugulama için, görüntüü orijinalden daha ugun hale getirmek Ugunluğu her bir ugulama için sağlamak. Bir
Uasal Görüntü İileştirme/Filtreleme Doç. Dr. Fevi Karslı karsli@ktu.edu.tr İileştirme Herhangi bir ugulama için, görüntüü orijinalden daha ugun hale getirmek Ugunluğu her bir ugulama için sağlamak. Bir
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü
 Mühendislikte İstatistiksel Yöntemler Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Araştırma sonuçlarının açıklanmasında frekans tablosu
Mühendislikte İstatistiksel Yöntemler Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 Araştırma sonuçlarının açıklanmasında frekans tablosu
Hafta 3 Görüntü İşleme ile İlgili Temel Kavramlar
 BLM429 Görüntü İşlemeye Giriş Hafta 3 Görüntü İşleme ile İlgili Temel Kavramlar Yrd. Doç. Dr. Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
BLM429 Görüntü İşlemeye Giriş Hafta 3 Görüntü İşleme ile İlgili Temel Kavramlar Yrd. Doç. Dr. Caner ÖZCAN Those who wish to succeed must ask the right preliminary questions. (Başarmak isteyenler doğru
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
MAK 210 SAYISAL ANALİZ BÖLÜM 6- İSTATİSTİK VE REGRESYON ANALİZİ Doç. Dr. Ali Rıza YILDIZ 1 İSTATİSTİK VE REGRESYON ANALİZİ Bütün noktalardan geçen bir denklem bulmak yerine noktaları temsil eden, yani
İstatistik ve Olasılık
 İstatistik ve Olasılık Ders 8: Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır. Bu anlamda, anakütleden çekilen
İstatistik ve Olasılık Ders 8: Prof. Dr. İrfan KAYMAZ Tanım Tahmin (kestirim veya öngörü): Mevcut bilgi ve deneylere dayanarak olayın bütünü hakkında bir yargıya varmaktır. Bu anlamda, anakütleden çekilen
Deney 5 : Ayrık Filtre Tasarımı. Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç
 İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
BÖLÜM 1 GİRİŞ: İSTATİSTİĞİN MÜHENDİSLİKTEKİ ÖNEMİ
 BÖLÜM..AMAÇ GİRİŞ: İSTATİSTİĞİ MÜHEDİSLİKTEKİ ÖEMİ Doğa bilimlerinde karşılaştığımız problemlerin birçoğunda olaydaki değişkenlerin değerleri bilindiğinde probleme kesin ve tek bir çözüm bulunabilir. Örneğin
BÖLÜM..AMAÇ GİRİŞ: İSTATİSTİĞİ MÜHEDİSLİKTEKİ ÖEMİ Doğa bilimlerinde karşılaştığımız problemlerin birçoğunda olaydaki değişkenlerin değerleri bilindiğinde probleme kesin ve tek bir çözüm bulunabilir. Örneğin
Yrd. Doç. Dr. Saygın ABDİKAN Öğretim Yılı Bahar Dönemi
 Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
Dijital Görüntü İşleme (JDF338) Yrd. Doç. Dr. Saygın ABDİKAN 2014-2015 Öğretim Yılı Bahar Dönemi 1 Ana bileşenler dönüşümü 2 Yöntem, minimum korelasyonlu bilgileri sıkıştırarak veri grubu hakkında maksimum
SÜREKLİ RASSAL DEĞİŞKENLER
 SÜREKLİ RASSAL DEĞİŞKENLER Sürekli Rassal Değişkenler Sürekli Rassal Değişken: Değerleriölçümyadatartımla elde edilen, bir başka anlatımla sayımla elde edilemeyen, değişkene sürekli rassal değişken denir.
SÜREKLİ RASSAL DEĞİŞKENLER Sürekli Rassal Değişkenler Sürekli Rassal Değişken: Değerleriölçümyadatartımla elde edilen, bir başka anlatımla sayımla elde edilemeyen, değişkene sürekli rassal değişken denir.
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI Tanım
 2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI 2.1. Tanım Regresyon analizi, bir değişkenin başka bir veya daha fazla değişkene olan bağımlılığını inceler. Amaç, bağımlı değişkenin kitle ortalamasını, açıklayıcı
2. REGRESYON ANALİZİNİN TEMEL KAVRAMLARI 2.1. Tanım Regresyon analizi, bir değişkenin başka bir veya daha fazla değişkene olan bağımlılığını inceler. Amaç, bağımlı değişkenin kitle ortalamasını, açıklayıcı
BMÜ-421 Benzetim ve Modelleme Kesikli Olay Benzetimi. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme Kesikli Olay Benzetimi İlhan AYDIN KESİKLİ-OLAY BENZETİMİ Kesikli olay benzetimi, durum değişkenlerinin zaman içinde belirli noktalarda değiştiği sistemlerin modellenmesi
BMÜ-421 Benzetim ve Modelleme Kesikli Olay Benzetimi İlhan AYDIN KESİKLİ-OLAY BENZETİMİ Kesikli olay benzetimi, durum değişkenlerinin zaman içinde belirli noktalarda değiştiği sistemlerin modellenmesi
8.Hafta. Değişkenlik Ölçüleri. Öğr.Gör.Muhsin ÇELİK. Uygun değişkenlik ölçüsünü hesaplayıp yorumlayabilecek,
 İSTATİSTİK 8.Hafta Değişkenlik Ölçüleri Hedefler Bu üniteyi çalıştıktan sonra; Uygun değişkenlik ölçüsünü hesaplayıp yorumlayabilecek, Serilerin birbirlerine değişkenliklerini yorumlayabileceksiniz. 2
İSTATİSTİK 8.Hafta Değişkenlik Ölçüleri Hedefler Bu üniteyi çalıştıktan sonra; Uygun değişkenlik ölçüsünü hesaplayıp yorumlayabilecek, Serilerin birbirlerine değişkenliklerini yorumlayabileceksiniz. 2
Görüntü Segmentasyonu (Bölütleme)
") Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 20 Aralık 2014 Cumartesi 1 Görüntü Segmentasyonu 20 Aralık 2014 Cumartesi 2 Gestalt kanunları Görüntü
Görüntü Segmentasyonu (Bölütleme) Segmentasyon, görüntüyü aynı cinsten obje ve bölgelere ayırmaktır. 20 Aralık 2014 Cumartesi 1 Görüntü Segmentasyonu 20 Aralık 2014 Cumartesi 2 Gestalt kanunları Görüntü
ELEKTRONİK ÇİZELGE. Hücreleri Biçimlendirme. Formülleri Kullanma. Verileri Sıralama. Grafik Oluşturma 1) HÜCRELERİ BİÇİMLENDİRME
 HÜCRELERİ BİÇİMLENDİRME") Hücreleri Biçimlendirme ELEKTRONİK ÇİZELGE Formülleri Kullanma Verileri Sıralama Grafik Oluşturma 1) HÜCRELERİ BİÇİMLENDİRME Elektronik Çizelge de sayıları; bin ayracı, yüzde oranı, tarih/saat ve para
Hücreleri Biçimlendirme ELEKTRONİK ÇİZELGE Formülleri Kullanma Verileri Sıralama Grafik Oluşturma 1) HÜCRELERİ BİÇİMLENDİRME Elektronik Çizelge de sayıları; bin ayracı, yüzde oranı, tarih/saat ve para
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT OpenCourseWare Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009
 MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
 A t a b e y M e s l e k Y ü k s e k O k u l u İstatistik Sunum 4 Öğr.Gör. Şükrü L/O/G/O KAYA www.sukrukaya.org www.themegallery.com 1 Yer Ölçüleri Yer ölçüleri, verilerin merkezini veya yığılma noktasını
A t a b e y M e s l e k Y ü k s e k O k u l u İstatistik Sunum 4 Öğr.Gör. Şükrü L/O/G/O KAYA www.sukrukaya.org www.themegallery.com 1 Yer Ölçüleri Yer ölçüleri, verilerin merkezini veya yığılma noktasını
Matlab da Dizi ve Matrisler. Mustafa Coşar
 Matlab da Dizi ve Matrisler Mustafa Coşar MATLAB Değişkenleri Matlab da değişkenler; skaler, dizi(vektör), matris veya metin (string) türünde olabilirler. Örnek olarak: a=1; b=-3.2e3; c=22/5; metin= mustafa
Matlab da Dizi ve Matrisler Mustafa Coşar MATLAB Değişkenleri Matlab da değişkenler; skaler, dizi(vektör), matris veya metin (string) türünde olabilirler. Örnek olarak: a=1; b=-3.2e3; c=22/5; metin= mustafa
(AYIRIM) DENLİ. Emre KUZUGÜDENL. Doç.Dr.Serdar CARUS
 DENLİ. Emre KUZUGÜDENL. Doç.Dr.Serdar CARUS") DİSKRİMİNANT ANALİZİ (AYIRIM) Emre KUZUGÜDENL DENLİ Doç.Dr.Serdar CARUS Bu analiz ile; Bir bireyin hangi gruptan geldiği (p değişkeni kullanarak, bireyi uygun bir gruba atar ) Her bir değişkenin atama
DİSKRİMİNANT ANALİZİ (AYIRIM) Emre KUZUGÜDENL DENLİ Doç.Dr.Serdar CARUS Bu analiz ile; Bir bireyin hangi gruptan geldiği (p değişkeni kullanarak, bireyi uygun bir gruba atar ) Her bir değişkenin atama
Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme
 BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
BLM429 Görüntü İşlemeye Giriş Bölüm 4 Yoğunluk Dönüşümleri ve Histogram İşleme Dr. Öğr. Üyesi Caner ÖZCAN It makes all the difference whether one sees darkness through the light or brightness through the
İÇİNDEKİLER ÖN SÖZ...
 İÇİNDEKİLER ÖN SÖZ... v GİRİŞ... 1 1. İSTATİSTİK İN TARİHÇESİ... 1 2. İSTATİSTİK NEDİR?... 3 3. SAYISAL BİLGİDEN ANLAM ÇIKARILMASI... 4 4. BELİRSİZLİĞİN ELE ALINMASI... 4 5. ÖRNEKLEME... 5 6. İLİŞKİLERİN
İÇİNDEKİLER ÖN SÖZ... v GİRİŞ... 1 1. İSTATİSTİK İN TARİHÇESİ... 1 2. İSTATİSTİK NEDİR?... 3 3. SAYISAL BİLGİDEN ANLAM ÇIKARILMASI... 4 4. BELİRSİZLİĞİN ELE ALINMASI... 4 5. ÖRNEKLEME... 5 6. İLİŞKİLERİN
AKÜ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 GÖRÜNTÜ İŞLEME DERS-9 YARDIMCI NOTLARI -2018 Hızlı Fourier Dönüşümü Matlab Örnekleri: fftshow() fonksiyonu function [ ] = fftshow(f) fl=log(1+abs(f)); fm=max(fl(:)); figure,imshow(im2uint8(fl/fm)); end
GÖRÜNTÜ İŞLEME DERS-9 YARDIMCI NOTLARI -2018 Hızlı Fourier Dönüşümü Matlab Örnekleri: fftshow() fonksiyonu function [ ] = fftshow(f) fl=log(1+abs(f)); fm=max(fl(:)); figure,imshow(im2uint8(fl/fm)); end
Kinematik Modeller. Kesikli Hale Getirilmiş Sürekli Zaman Kinematik Modeller: Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder.
 1 Kinematik durum modelleri konumun belirli bir türevi sıfıra eşitlenerek elde edilir. Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder. Böyle modeller polinom modeller olarak ta bilinir
1 Kinematik durum modelleri konumun belirli bir türevi sıfıra eşitlenerek elde edilir. Rastgele giriş yok ise hareketi zamanın bir polinomu karakterize eder. Böyle modeller polinom modeller olarak ta bilinir
Bilgisayar ne elde eder (görüntüden)? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51
? Dijital Görüntü İşleme Fevzi Karslı, KTÜ. 08 Ekim 2013 Salı 51") Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Bilgisayar ne elde eder (görüntüden)? 08 Ekim 2013 Salı 51 Zorluk 1: bakış açısı 2012, Selim Aksoy 08 Ekim 2013 Salı 52 Zorluk 2: aydınlatma 08 Ekim 2013 Salı 53 Zorluk 3: oklüzyon (ölü bölge oluşumu)
Dijital (Sayısal) Fotogrametri
 Fotogrametri") Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Dijital (Sayısal) Fotogrametri Dijital fotogrametri, cisimlere ait iki boyutlu görüntü ortamından üç boyutlu bilgi sağlayan, sayısal resim veya görüntü ile çalışan fotogrametri bilimidir. Girdi olarak
Analog Alçak Geçiren Filtre Karakteristikleri
 Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
1. LİNEER PCM KODLAMA
 1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
BÖLÜM 5 MERKEZİ EĞİLİM ÖLÇÜLERİ
 1 BÖLÜM 5 MERKEZİ EĞİLİM ÖLÇÜLERİ Gözlenen belli bir özelliği, bu özelliğe ilişkin ölçme sonuçlarını yani verileri kullanarak betimleme, istatistiksel işlemlerin bir boyutunu oluşturmaktadır. Temel sayma
1 BÖLÜM 5 MERKEZİ EĞİLİM ÖLÇÜLERİ Gözlenen belli bir özelliği, bu özelliğe ilişkin ölçme sonuçlarını yani verileri kullanarak betimleme, istatistiksel işlemlerin bir boyutunu oluşturmaktadır. Temel sayma
Örnek 4.1: Tablo 2 de verilen ham verilerin aritmetik ortalamasını hesaplayınız.
 .4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
.4. Merkezi Eğilim ve Dağılım Ölçüleri Merkezi eğilim ölçüleri kitleye ilişkin bir değişkenin bütün farklı değerlerinin çevresinde toplandığı merkezi bir değeri gösterirler. Dağılım ölçüleri ise değişkenin
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI
 KENAR BELİRLEME ALGORİTMALARI") GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
GÖRÜNTÜ İŞLEME - (7.Hafta) KENAR BELİRLEME ALGORİTMALARI Bu konuda bir çok algoritma olmasına rağmen en yaygın kullanılan ve etkili olan Sobel algoritması burada anlatılacaktır. SOBEL FİLTRESİ Görüntüyü
VEKTÖR UZAYLARI 1.GİRİŞ
 1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
1.GİRİŞ Bu bölüm lineer cebirin temelindeki cebirsel yapıya, sonlu boyutlu vektör uzayına giriş yapmaktadır. Bir vektör uzayının tanımı, elemanları skalar olarak adlandırılan herhangi bir cisim içerir.
TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun.
 Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
Doç.Dr.Mehmet MISIR-2013 TÜRKİYE CUMHURİYETİ DEVLETİNİN temellerinin atıldığı Çanakkale zaferinin 100. yılı kutlu olsun. Son yıllarda teknolojinin gelişmesi ile birlikte; geniş alanlarda, kısa zaman aralıklarında
RASSAL SAYI ÜRETİLMESİ
 Dr. Mehmet AKSARAYLI Ekonometri Böl. Simülasyon Ders Notları Rassal Sayı Üretilmesi RASSAL SAYI ÜRETİLMESİ Simülasyon analizinde kullanılacak az sayıda rassal sayı üretimi için ilkel yöntemler kullanılabilir.
Dr. Mehmet AKSARAYLI Ekonometri Böl. Simülasyon Ders Notları Rassal Sayı Üretilmesi RASSAL SAYI ÜRETİLMESİ Simülasyon analizinde kullanılacak az sayıda rassal sayı üretimi için ilkel yöntemler kullanılabilir.
2.3. MATRİSLER Matris Tanımlama
 2.3. MATRİSLER 2.3.1. Matris Tanımlama Matrisler girilirken köşeli parantez kullanılarak ( [ ] ) ve aşağıdaki yollardan biri kullanılarak girilir: 1. Elemanları bir tam liste olarak girmek Buna göre matris
2.3. MATRİSLER 2.3.1. Matris Tanımlama Matrisler girilirken köşeli parantez kullanılarak ( [ ] ) ve aşağıdaki yollardan biri kullanılarak girilir: 1. Elemanları bir tam liste olarak girmek Buna göre matris
BİYOİSTATİSTİK. Ödev Çözümleri. Yrd. Doç. Dr. Aslı SUNER KARAKÜLAH
 BİYOİSTATİSTİK Ödev Çözümleri Yrd. Doç. Dr. Aslı SUNER KARAKÜLAH Ege Üniversitesi, Tıp Fakültesi, Biyoistatistik ve Tıbbi Bilişim AD. Web: www.biyoistatistik.med.ege.edu.tr Ödev 1 Çözümleri 2 1. Bir sonucun
BİYOİSTATİSTİK Ödev Çözümleri Yrd. Doç. Dr. Aslı SUNER KARAKÜLAH Ege Üniversitesi, Tıp Fakültesi, Biyoistatistik ve Tıbbi Bilişim AD. Web: www.biyoistatistik.med.ege.edu.tr Ödev 1 Çözümleri 2 1. Bir sonucun
1.58 arasındaki her bir değeri alabileceği için sürekli bir
 7.SUNUM Hatırlanacağı gibi, kesikli rassal değişkenler sonlu (örneğin; 0, 1, 2,...,10) veya sayılabilir sonsuzlukta (örneğin; 0, 1, 2,...) değerler alabilmektedir. Fakat birçok uygulamada, rassal değişkenin
7.SUNUM Hatırlanacağı gibi, kesikli rassal değişkenler sonlu (örneğin; 0, 1, 2,...,10) veya sayılabilir sonsuzlukta (örneğin; 0, 1, 2,...) değerler alabilmektedir. Fakat birçok uygulamada, rassal değişkenin
BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ. Haftalık Ders Planı
 Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
Düzey : Lisans Ders Kodu : BLG325.1 Ders Adı : SINYAL ISLEME BLG325.1 SINYAL ISLEME DERSİ BİLGİ PAKETİ lık Ders Planı 1 : İşaret ve sistem tanımı, ayrık zamanlı ve sürekli zamanlı sistemler, ayrık değerli
DENEY 1: Matlab de Temel Haberleşme Sistemleri Uygulamaları
 DENEY 1: Matlab de Temel Haberleşme Sistemleri Uygulamaları AMAÇ: MATLAB programının temel özelliklerinin öğrenilmesi, analog işaretler ve sistemlerin sayısal bir ortamda benzetiminin yapılması ve incelenmesi.
DENEY 1: Matlab de Temel Haberleşme Sistemleri Uygulamaları AMAÇ: MATLAB programının temel özelliklerinin öğrenilmesi, analog işaretler ve sistemlerin sayısal bir ortamda benzetiminin yapılması ve incelenmesi.
Rastgele Değişkenlerin Dağılımları. Mühendislikte İstatistik Yöntemler
 Rastgele Değişkenlerin Dağılımları Mühendislikte İstatistik Yöntemler Ayrık Rastgele Değişkenler ve Olasılık Dağılımları Yapılan çalışmalarda elde edilen verilerin dağılışı ve dağılış fonksiyonu her seferinde
Rastgele Değişkenlerin Dağılımları Mühendislikte İstatistik Yöntemler Ayrık Rastgele Değişkenler ve Olasılık Dağılımları Yapılan çalışmalarda elde edilen verilerin dağılışı ve dağılış fonksiyonu her seferinde
MIT OpenCourseWare http://ocw.mit.edu. 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009
 MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
10.Konu Tam sayıların inşası
 10.Konu Tam sayıların inşası 1. Tam sayılar kümesi 2. Tam sayılar kümesinde toplama ve çarpma 3. Pozitif ve negatif tam sayılar 4. Tam sayılar kümesinde çıkarma 5. Tam sayılar kümesinde sıralama 6. Bir
10.Konu Tam sayıların inşası 1. Tam sayılar kümesi 2. Tam sayılar kümesinde toplama ve çarpma 3. Pozitif ve negatif tam sayılar 4. Tam sayılar kümesinde çıkarma 5. Tam sayılar kümesinde sıralama 6. Bir
Yapılan alan araştırması sonucunda aşağıdaki sonuçlar elde edilmiştir. ( ) ( ) ( ) ( )
 ( ) ( ) ( )") İKİ DEĞİŞKENLİ OLASILIK Rassal bir deneme yapılmakta ve farklı iki olay ile ilgilenilmektedir. A 1, A 2,,A i olayları bağdaşmaz ve bütünü kapsayıcıdır. B 1, B 2,,B j olayları bağdaşmaz ve bütünü kapsayıcıdır.
İKİ DEĞİŞKENLİ OLASILIK Rassal bir deneme yapılmakta ve farklı iki olay ile ilgilenilmektedir. A 1, A 2,,A i olayları bağdaşmaz ve bütünü kapsayıcıdır. B 1, B 2,,B j olayları bağdaşmaz ve bütünü kapsayıcıdır.
OLASILIK ve KURAMSAL DAĞILIMLAR
 OLASILIK ve KURAMSAL DAĞILIMLAR Kuramsal Dağılımlar İstatistiksel çözümlemelerde; değişkenlerimizin dağılma özellikleri, çözümleme yönteminin seçimi ve sonuçlarının yorumlanmasında önemlidir. Dağılma özelliklerine
OLASILIK ve KURAMSAL DAĞILIMLAR Kuramsal Dağılımlar İstatistiksel çözümlemelerde; değişkenlerimizin dağılma özellikleri, çözümleme yönteminin seçimi ve sonuçlarının yorumlanmasında önemlidir. Dağılma özelliklerine
MIT OpenCourseWare http://ocw.mit.edu. 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009
 MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
MIT OpenCourseWare http://ocw.mit.edu 14.30 Ekonomide İstatistiksel Yöntemlere Giriş Bahar 2009 Bu materyale atıfta bulunmak ve kullanım koşulları için http://ocw.mit.edu/terms sayfasını ziyaret ediniz.
İstatistik ve Olasılığa Giriş. İstatistik ve Olasılığa Giriş. Ders 3 Verileri Sayısal Ölçütlerle İfade Etme. Verileri Sayısal Ölçütlerle İfade Etme
 İstatistik ve Olasılığa Giriş Robert J. Beaver Barbara M. Beaver William Mendenhall Presentation designed and written by: Barbara M. Beaver İstatistik ve Olasılığa Giriş Ders 3 Verileri Sayısal Ölçütlerle
İstatistik ve Olasılığa Giriş Robert J. Beaver Barbara M. Beaver William Mendenhall Presentation designed and written by: Barbara M. Beaver İstatistik ve Olasılığa Giriş Ders 3 Verileri Sayısal Ölçütlerle
Ders 9: Kitle Ortalaması ve Varyansı için Tahmin
 Ders 9: Kitle Ortalaması ve Varyansı için Tahmin Kitle ve Örneklem Örneklem Dağılımı Nokta Tahmini Tahmin Edicilerin Özellikleri Kitle ortalaması için Aralık Tahmini Kitle Standart Sapması için Aralık
Ders 9: Kitle Ortalaması ve Varyansı için Tahmin Kitle ve Örneklem Örneklem Dağılımı Nokta Tahmini Tahmin Edicilerin Özellikleri Kitle ortalaması için Aralık Tahmini Kitle Standart Sapması için Aralık
Mühendislikte İstatistik Yöntemler
 .0.0 Mühendislikte İstatistik Yöntemler İstatistik Parametreler Tarih Qma.3.98 4..98 0.3.983 45 7..984 37.3.985 48 0.4.986 67.4.987 5 0.3.988 45.5.989 34.3.990 59.4.99 3 4 34 5 37 6 45 7 45 8 48 9 5 0
.0.0 Mühendislikte İstatistik Yöntemler İstatistik Parametreler Tarih Qma.3.98 4..98 0.3.983 45 7..984 37.3.985 48 0.4.986 67.4.987 5 0.3.988 45.5.989 34.3.990 59.4.99 3 4 34 5 37 6 45 7 45 8 48 9 5 0
Sürekli-zaman İşaretlerin Ayrık İşlenmesi
 Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
İMGE İŞLEME Ders-2. İmge Dosya Tipleri ve Temel İşlemler. Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm
 İMGE İŞLEME Ders-2 İmge Dosya Tipleri ve Temel İşlemler (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ MATLAB temel bilgiler
İMGE İŞLEME Ders-2 İmge Dosya Tipleri ve Temel İşlemler (Yrd. Doç. Dr. M. Kemal GÜLLÜ) Dersin web sayfası: http://mf.kou.edu.tr/elohab/kemalg/imge_web/odev.htm Hazırlayan: M. Kemal GÜLLÜ MATLAB temel bilgiler
13. Olasılık Dağılımlar
 13. Olasılık Dağılımlar Mühendislik alanında karşılaşılan fiziksel yada fiziksel olmayan rasgele değişken büyüklüklerin olasılık dağılımları için model alınabilecek çok sayıda sürekli ve kesikli fonksiyon
13. Olasılık Dağılımlar Mühendislik alanında karşılaşılan fiziksel yada fiziksel olmayan rasgele değişken büyüklüklerin olasılık dağılımları için model alınabilecek çok sayıda sürekli ve kesikli fonksiyon
Appendix B: Olasılık ve Dağılım Teorisi
 Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Notları Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım
Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Notları Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım
YTÜ İktisat Bölümü EKONOMETRİ I Ders Notları
 Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
YTÜ İktisat Bölümü EKONOMETRİ I Ders Notları
 Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
Yıldız Teknik Üniversitesi İktisat Bölümü Ekonometri I Ders Kitabı: J.M. Wooldridge, Introductory Econometrics A Modern Approach, 2nd. edition, Thomson Learning Appendix B: Olasılık ve Dağılım Teorisi
BAZI ÖNEMLİ SÜREKLİ DEĞİŞKEN DAĞILIMLARI
 BAZI ÖNEMLİ SÜREKLİ DEĞİŞKEN DAĞILIMLARI BAZI SÜREKLİ OLASILIK DAĞILIMLARI 1. SÜREKLİ DÜZGÜN (UNIFORM) DAĞILIM 2. NORMAL DAĞILIM 3. BİNOM DAĞILIMINA NORMAL YAKLAŞIM 4. POISSON DAĞILIMINA NORMAL YAKLAŞIM
BAZI ÖNEMLİ SÜREKLİ DEĞİŞKEN DAĞILIMLARI BAZI SÜREKLİ OLASILIK DAĞILIMLARI 1. SÜREKLİ DÜZGÜN (UNIFORM) DAĞILIM 2. NORMAL DAĞILIM 3. BİNOM DAĞILIMINA NORMAL YAKLAŞIM 4. POISSON DAĞILIMINA NORMAL YAKLAŞIM
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 10 Nesne / Yüz Tespiti ve Tanıma Alp Ertürk alp.erturk@kocaeli.edu.tr Nesne Tespiti Belirli bir nesnenin sahne içindeki konumunun tespitidir Tespit edilecek nesne önceden
Bilgisayarla Görüye Giriş Ders 10 Nesne / Yüz Tespiti ve Tanıma Alp Ertürk alp.erturk@kocaeli.edu.tr Nesne Tespiti Belirli bir nesnenin sahne içindeki konumunun tespitidir Tespit edilecek nesne önceden
TANIMLAYICI İSTATİSTİKLER
 TANIMLAYICI İSTATİSTİKLER Tanımlayıcı İstatistikler ve Grafikle Gösterim Grafik ve bir ölçüde tablolar değişkenlerin görsel bir özetini verirler. İdeal olarak burada değişkenlerin merkezi (ortalama) değerlerinin
TANIMLAYICI İSTATİSTİKLER Tanımlayıcı İstatistikler ve Grafikle Gösterim Grafik ve bir ölçüde tablolar değişkenlerin görsel bir özetini verirler. İdeal olarak burada değişkenlerin merkezi (ortalama) değerlerinin
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat