KESTİRİMCİ BAKIM KABUL TESTİ KALİTE KONTROL SIZINTI TESPİTİ UÇAK MOTORU ANALİZİ MAKİNA DİZAYNI VE MÜHENDİSLİK
|
|
|
- Turgay Tunç
- 8 yıl önce
- İzleme sayısı:
Transkript
1 Titreşim Aalizie Titreşim ölçümü ve aalizi, döe ekipmaları mekaik durumlarıı iceleme, kotrol etme ve makiala arızalarıı taımlama içi kullaıla metotlarda e etkilisidir. Titreşim aalizi, makialar üzeride titreşim ölçümü yaparak makiaı titreşim özelliklerie ait veri toplamak ve daha sora toplaa bu verileri aaliz ederek makiaları mekaik problemlerii tespit etmektir.

2 KESTİRİMCİ BAKIM KABUL TESTİ KALİTE KONTROL SIZINTI TESPİTİ UÇAK MOTORU ANALİZİ MAKİNA DİZAYNI VE MÜHENDİSLİK

3 Titreşim aalizi ile aşağıdaki arızalar taımlaabilir: Balas bozukluğu Mil eğriliği Şase zayıflığı Cıvata gevşekliği Kapli ayarsızlığı Rulma boşluğu Sürtüme Rezoas Kaymalı yatak aşıması Rulma arızası Rulma ömrü Dişli arızaları Elektriksel arızalar Hidrodiamik titreşimler

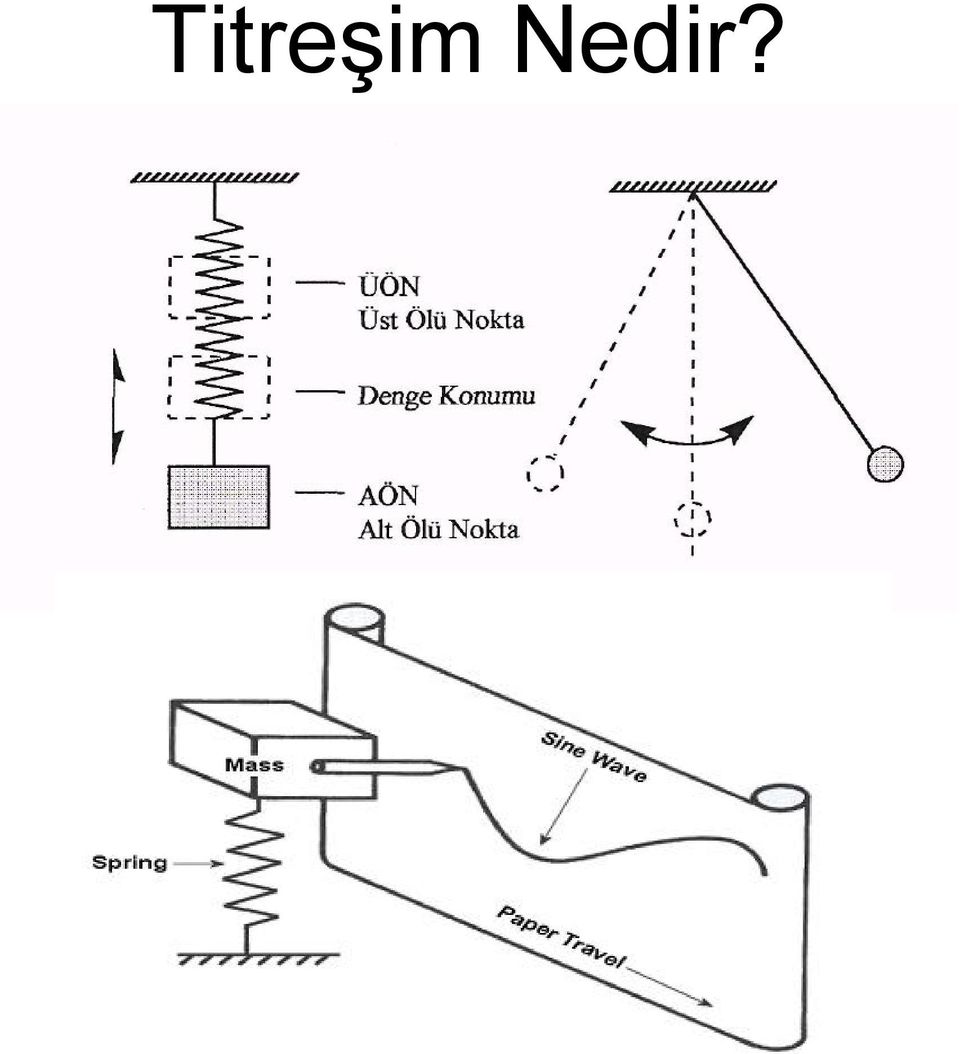
4 Titreşimle İlgili Terimler Titreşim edir? Bir sistemi dege koumu civarıda yapmış olduğu salıım hareketie titreşim deir. Eğer yapıla salıım hareketi T saiyede kedii tekrar ediyorsa böyle hareketlere peryodik hareket deir. E basit peryodik hareket harmoik hareket adıı alır. x(t)=x(t+t) x=yerdeğiştirme m, rad t=zama s T=Peryod s =Peryod sayısı adet

5 Titreşim Nedir?
6

7 Harmoik Hareket x=yerdeğiştirme (m,rad) A=Gelik (m,rad) t=zama (s) T=Peryot (s) t x=a si π T x A t T
 T=Peryot (s) t x=a")
8 Daire Üzeride Hareketli Bir Noktaı Harmoik Gösterimi O A P x p A Asi t t π ω= = π f T x=a si ωt x=ω A cos ωt=ω A si(ωt-π/) x=-ω Asiωt=ω Asi(ωt+π)
 x=-ω Asiωt=ω")
9 Euler Deklemi Yardımı ile Döer Bir Vektörü Gösterimi Euler Deklemi i ω t i θ z=a e =A e z=a cos ωt + i A si ωt z=x + iy i θ e =cosθ +i si θ θ=ω t A= x +y θ=ta -1 y x A θ i ω t z=a e

10 Harmoik Harekette Yerdeğiştirme Hız ve İvme Vektörlerii Gösterimi Aw x x Aw A t t x x

11 Frekasları Ayı Vektörleri Toplaması x(t)=x1cos(ωt-j 1)+Xcos(ωt-j ) Xcos(ωt-j ) x(t)= å Xicos(ωt-j i) i=1 cos(α-β)=cos α cos β+si α si β bağıtısı kullaılarak å x(t)= X (cosωt cosj +siωt sij ) i i i i=1 æ ö æ ö å å = X cosj cosωt+ Xsij siωt çè ø çè ø i i i i i=1 i=1

12 Burada, A= X cosj B= X sij i i i i i=1 i=1 å å yazılırsa, x(t)=a cos ωt+b si ωt buluur. æ ö æ ö X= A +B = Xicosj i + Xsij i i çå çå è i=1 ø è i=1 ø j=ta B =ta A -1-1 i=1 x(t)=x cos(ωt-j) å å i=1 Xsij i i X cosj i i
=x cos(ωt-j) å å i=1")
13 Frekasları Birbirie Yakı Vektörleri Toplaması ω 1»ω x(t)=x cos(ω t-j )+X cos(ω t-j ) Bu ifadeyi yeide düzeleyelim, X+X 1 X-X 1 x(t)= [ cos(ω1t-j 1)+cos(ωt-j ) ] + [ cos(ω1t-j 1)-cos(ωt-j ) ] α-β α+β α-β α+β cos α+cos β= cos cos ve cos α-cos β=- si si Trigoometrik bağıtılarıda yararlaarak, (ω 1+ω )t-(j1-j ) A(t)=(X 1+X )cos ve (ω 1+ω )t-(j1-j ) B(t)=-(X 1-X )si
![1)-cos(ωt-j ) ] α-β α+β α-β α+β cos α+cos β= cos cos ve cos α-cos β=- si si Trigoometrik](/docs-images/47/3918133/images/page_13.jpg "bağıtılarıda yararlaarak, (ω 1+ω )t-(j1-j ) A(t)=(X 1+X )cos ve (ω 1+ω )t-(j1-j ) B(t)=-(X")
14 Taımları altıda, ω 1+ω j+j 1 ω 1+ω j+j 1 x(t)=a(t) æ ö æ ö cos t- +B(t) si t- ç è ø çè ø Yazılabilir. Burada, X(t)= A(t)+B(t) ve j(t)= j+j 1-1 B(t) +ta A(t) X(t)= X +X + X X cos (ω -ω )t-(j -j ) [ ] j+j é 1-1 X-X 1 ω1-ω j-j ù æ ö 1 j(t)= +ta ta t- ê X 1+X è ç ø ú ë û ifadeleri kullaılarak, æ ω 1+ω ö x(t)=x(t) cos ç t-j(t) çè ø toplam ifadesi buluur.
 [ ] 1 1 1 1 j+j é 1-1 X-X 1 ω1-ω j-j ù æ ö 1 j(t)= +ta ta t- ê X 1+X è ç ø ú ë û")
15 Vuru Titreşim Parametreleri ω m=ω1-ω ω 1+ω ω= π T m = ω -ω 1 vuru frekası veya modülasyo frekası taşıyıcı frekas vuru peryodu 4π T= ω +ω taşıyıcı peryodu 1 Tm ω = T (ω -ω ) 1 T m vuru peryoduda gerçekleşecek titreşim sayısı
 1 T m vuru peryoduda gerçekleşecek titreşim")
16 Vuru Olayı x T m T X ~ (t) x(t) x(t)=100 e 1 x (t)=50 e x(t)=? i π t i.π t X 1 +X X 1 +X X 1 -X X 1 -X t clear t=0:0.01:30; x1=100*exp(i**pi*t); x=50*exp(i*.*pi*t); x=x1+x; plot(t,x)
; x=50*exp(i*.")
17 Titreşim Sistemlerii Elemaları Kütle x Yay Söüm Kuvvet x

18 Yay Elemaları Helisel Yaylar

19 Yaprak Yaylar

20 Yay Karakteristikleri F (N) F (N) Lieer (doğrusal) yay karakteristiği X (m) X (m) No-Lieer (doğrusal olmaya) yay karakteristiği
 yay")
21 Yay Katsayısı Kuvvet F k=ta α= (N/m) x Yerdeğiştirme
22 Yay Katsayısı Tablosu E I k= L E A k= L G I p k= L 4 G d k= 64 R 3 3EI k= L 3
23 k= 48 E I L 3 L/ 19 E I k= 3 L L/ 768 E I k= 7 L 3 L/
24 x a b 3 E I L P b x ab 6 E I L k= y y x = ( L -x -b ) EI L 1E I k= L 3
25 3E I k= L+a a ( ) L a 4E I k= a 3L+8 a ( ) L a
26 Söüm Elemaları Viskoz söüm Coulumb (kuru sürtüme) söümü Malzeme (histeresiz) söüm Sıkıştırılmış yağ (squeeze-film) damperi Elekro-mayetik damper Elektro-viskoz damper Piezo-elektrik damper
27 Kütle ve Atalet Elemaları Bir cismi bir döme ekseie göre kütlesel atalet mometii taımı: dm D r J= r dm ò D döme eksei
28 Problem: Orta oktasıda mafsallı ve sabit kesitli bir çubuğu kütlesel atalet mometii buluması y x L/ A dx x L
29 Çözüm: Elemater hacim Elemater kütle dv=a dx dm=ρ dv Kütlesel atalet mometii taımıda L L ò ò J= ρ A x dx=ρ A x dx L L - - L 3 x 1 3 J=ρ A = ρ A L 3 1 L - buluur. J= r dm ò D burada, 1 m = r A L J = m L 1
30 Problem: Bir diski döme ekseie göre kütlesel atalet mometii buluması. dr r d da R L
31 Çözüm: Elemater ala Elemater hacim Elemater kütle si d q da=r.si dθ.dr dv=l.da=l. r. si dθ.dr dm=ρ.dv=ρ.l.r.si dθ.dr dm=ρ.lr.dθ.dr buluur. π R J= ò r dm= ò ò ρ.l.r.dθ.dr= ρ.l.π.r D m = r.v = rp..r.l J = m.r
32 Titreşim yapa bir kütlei hareket özellikleri, tam olarak, 6 farklı hareketi birleşimiyle ifade edilebilir. Bu hareketler 3 ekse yöüdeki yerdeğiştirmeler ve 3 ekse etrafıdaki döme hareketleridir. Bu 6 hareket tipi Şekil-'de gösterilmiştir. Her kütlei karmaşık hareketleri bu 6 hareket kullaılarak ifade edilebilir. Bu edele bir kütlei ormaldeki serbestlik derecesi 6'dır. Acak bu hareketlerde bazıları sistemi özellikleri dolayısıyla kısıtlamış olabilir. Öreği Şekil-1deki yayı ucua bağlı ola kütlei muhtemel 6 hareketide 5 taesi kısıtlamıştır. (Kütlei kağıt düzlemi içide salıım yapabildiğii varsayıyoruz.) Bu kütle yalızca yukarı ve aşağı hareket edebilmektedir. Ayı biçimde, şekildeki sarkaç da yalızca sarkaç koluu bağlı buluduğu okta etrafida döme hareketi yapabilmektedir. Bu edele bu sistemlere tek serbestlik dereceli sistemler adı verilir. Titreşim hareketii icelerke alaşılmasıı daha kolay olması maksadıyla tek serbestlik dereceli bir sistemi örek alacağız. Herhagi bir sistemi ayrıtılı olarak icelemesi pratikte pek mümkü değildir. O edele sistemleri özelliklerie uygu fiziki modelleri çıkarılır. Tek serbestlik dereceli bütü sistemler (lieer olmak şartıyla) gösterile basit modelle iceleebilir.
33
34 Ayrık ve Sürekli Sistemler Solu sayıda serbestlik dereceli sistemlere ayrık sistem deir. Serbestlik derecesi sosuz ola sistemlere sürekli sistem deir. Sürekli sistem
35 SERBEST CİSİM DİYAGRAMI HAREKET DENKLEMİ y Newto s Law: mx ( t) kx( t) k c m x(t) Frictio-free surface x f k f c mg mx ( t) kx( t) 0 N x(0) x 0, x(0) v 0
36 Söümsüz Serbest Titreşim Düşey koumda kütle-yay sistemii hareket deklemi: L 0 k k st k x t x Statik dege koumu
37 k d st Serbest cisim diyagramı G= m.g Statik dege koumu: Burada, ω ΣF y =0 sistemi tabii frekasıdır. G=m.g=k.δ k g = =ω m δ st k ω = = m st g δ st
38 Newto u. kauu uygularsak, k( d st + x) x m x G= m.g ( d ) S F = m.a m x = -k + x + G st G=m.g=k.δst olduğuda, m x+k x=0 buluur.
39 Yatay koumda kütle-yay sistemii hareket deklemi: x x k m k x m m x Newto u. kauu uygularsak, ΣF=m.a m x = -k x m x + k x = 0 buluur.
40 Hareketi Diferasiyel Deklemii Eerji Metodu ile Buluması Bu metoodu kullaılabilmesi içi titreşim sistemii; Söümsüz Tek serbestlik dereceli olması gerekir. E+E=C=sabit k p d ( E ) k +E p =0 dt
41 Söümsüz Serbest Titreşim Hareket Deklemii Buluması m x + k x = 0 Bu diferasiyel deklemi çözümüü x = A e s t biçimide olduğuu biliyoruz. Burada, A ve s itegrasyo sabitleridir. Çözüm kabulüü türetirsek, x = x= s A e s A e s t s t Buluur. Bular yukarıdaki diferasiyel deklemde yerie koursa,
42 ( ) st m s + k A e = 0 Burada, s t A, e ¹ 0 dır. m s + k = 0 Buluur, bu dekleme karakteristik deklem deir. Karakteristik deklemi kökleri, s k = - = m i w 1, dir.
43 Bu durumda, hareket deklemi: x(t) = Ae + Ae = Ae + Ae st 1 st -iwt iwt 1 1 A 1 ve A başlagıç şartlarıda buluacak katsayılardır. iqt e = cos q.t i.si q.t eşitliği kullaılırsa, ( w w ) ( w w ) x(t) = A cos t - i si t + A cos t + i si t 1 ( ) w ( ) x(t) = A + A cos t -i A -A si w t 1 1 = ( + ) ve B ( A A ) B A A 1 1 = - olmak üzere, 1
44 x(t)=b1cos ωt+bsi ωt olur. Başlagıç şartları Bu durumda, ì x(0) = x t= 0 í ï ïï = B=x 1 0, 0 olsu. ïî x(0) x 0 x B= ω 0 buluur. Burada başlagıç şartlarıa bağlı hareket deklemi aşağıdaki şekilde buluur. x(t)=x cos ω t+ x si ω t 0 0 ω
45 İKİNCİ MERTEBEDEN DİFERANSİYEL DENKLEM mileböl: xt ( ) xt ( ) 0 k m doğa l frekas rad/s xt () Asi( t)
46 PERİYODİK HAREKET x(0) amplitude Displacemet Faz açısı Time sec Maximum Velocity
47 s peryot Frekas : rad/s doğoğfrekas f T rad/s cycles rad/cycle s Hz Frekas geellikle Hz olarak ifade edilir Fakat trigoemetrik foksiyolarda rad/s olarak kullaılır.
48 Gelik ve Faz x 0 Asi( 0 ) Asi v 0 Acos( 0 ) Acos Solvig yields A 1 x 0 v 0, ta 1 x 0 v 0 Amplitude Phase
49 Titreşim geliği üç farklı biçimde ifade edilir. peak to peak (P-P)(İki tepe arasıdaki uzaklık): Kütlei titreşim esasıda ulaştığı iki uç okta arasıdaki uzaklıktır. Değeri a'dır. Zero to peak (0-P): Dege koumu ile tepe oktası arasıdaki uzaklıktır. Değeri a'dır. RMS (Root mea square)(kareler toplamıı karekökü): Titreşimi efektif değeridir. Eliizi titreşim yapa makia üzerie koyduğuuzda hissettiğiiz titreşim seviyesidir. Basit harmoik harekette 0-P değerii katıdır. RMS değeri daha sora tekrar ele alıacaktır. Acak bu değer yalızca belli bir frekastaki düzgü harmoik bir titreşim içi geçerlidir. Yai 1500 CPM frekasıda ve 0-P geliği 0.1 μm ola siüzoidal bir titreşimi RMS değeri μm 'dir. Acak frekas düzlemide (spektrum grafiği) birçok farklı frekasta titreşimler mevcuttur. Bu durumda ise RMS değeri aşağıdaki formül kullaılarak buluur.
50 Tepede tepeye mesafe titreşimi geliğii alacağı büyük ve e, küçük değerleri gösterdiğide özellikle titreşim yerdeğiştirmesii öemli olduğu veya e büyük gerilmeleri dikkate alıması gerektiği yada mekaik boşlukları öem taşıdığı yerlerde kullaışlıdır. Tepe değeri özellikle kısa zama aralığıda ola şok titreşimleri göstermesi açısıda öemlidir. Ortalama değer zama içideki değişimi de göz öüe almakla beraber uygulamada fiziki bir değere doğruda doğruya bağlatırılmadığıda fazlaca bir öem taşımaz. RMS değeri ise titreşim ölçümleride e uygu değeridir. Buum sebebi titreşimi zamaa bağlı olarak değişmesii de dikkate almakla beraber, titreşimi ihtiva ettiği eerji miktarı, yai titreşimi tahrip gücüyle doğruda bağlatırılabilir.
51 Problem: Aşağıda dege koumuda verile sistemi diferasiyel deklemii çıkarıp tabii frekasıı hesaplayıız m,r k M x
52 Çözüm: Jmj j k x M x M x
53 Newto u. kauu uygulaırsa, S M= JTopj J j + M x.r = -k x.r m j<< 0 si j@ j cos j@ 1 J m = 1 m r x= r.si j= r x = r x= r j j j yazılabilir.
54 düzeleme yapılırsa, æ 1 m r ö ç j + M x.r = -k x.r çè ø æ 1 m r M r ö k r ç + j + j= 0 çè ø æ1 ö ç m + M j + k j= 0 çè ø k k k w = = = m 1 m+ M m+ M rad/s
55
56
57 Average & RMS A peak value 1 x lim T T x x rms 0 1 lim T T x T x( t) dt = average value T 0 x ( t) dt = mea - square value = root mea square value
58 The Decibel or db scale It is ofte useful to use a logarithmic scale to plot vibratio levels (or oise levels). Oe such scale is called the decibel or db scale. The db scale is always relative to some referece value x 0. It is defie as: db x 10log 10 0log x0 For example: if a acceleratio value was 19.6m/s the relative to 1g (or 9.8m/s ) the level would be 6dB, log10 0log x x 0 6dB
59 Diğer Çözüm Formları x(t) Asi( t ) x(t) A 1 si t A cos t x(t) a 1 e j t a e j t
60 TEPE DEĞERLERİ max veya tepe değeri : deplasma: x hız: x ivme: max x max max A A A
61 1 A=1, =1 x v a Time (sec)
62
63
64 Problem:Aşağıdaki titreşim sistemii üzerie m kütlesi h yüksekliğide düşüp yapışıyor. M kütlesii hareket deklemii yazıız. m h M x k
65 Çözüm: m ( M ) + m x h k M V = gh x x 0 = mg k k m M x m gh = V = M + m 0 0 x kx
66 m kütlesi ile M i çarpıştığı adaki mometumuu yazalım. ( ) m V (M m) V m gh M m V V x m gh = + 0 = = 0 = M + m kütleside dolayı k yayı bir miktar sıkışır. mg d st = x0 =- k m Newto u. kauu uygulaırsa, ( ) ( ) å F = m a M + m x = -k x M + m x + k x = 0
67 Sistemi tabii frekası. k k w = = m M+ m Söümsüz serbest titreşim hareketii başlagıç şartlarıa bağlı hareket deklemi aşağıdaki gibiydi: x x(t) = x cos w t + si w t 0 0 w değerler yerie koulura; mg æ k ö gh æ k ö xt () =- cos t m si t k + ç M m k( M m) è + ø + çè M+ m ø
68 Lieerleştirme Yapısal olieerlik (Malzeme olieerliği) Geometrik olieerlik -Ağırlık kuvveti - Merkezkaç kuvveti - Sürtüme kuvveti
69 Tek serbestlik dereceli bir sistemi diferasiyel deklemi aşağıdaki gibidir. m x+ f( x) = 0 Burada f( x) yay foksiyoudur. f( x) lieer olmaya bir formda ortaya çıkmış olsu. Koordiat başlagıcıı, x= 0 dege koumuda seçelim, yai; f( 0) = 0 ( ) f x x= 0 olsu bu durumda foksiyouu civarıda kuvvet serisie açalım. 3 k ( ) 1 ( ) 1 ( ) 1 ( ) df 0 d f 0 d f 0 d f 0 f( x) = f( 0) + x+ x + x + =å x dx! dx 3! dx k! dx 3 k 3 k k= 0
70 f(x) 3 x << x, x ihmal edilirse; Elde edile lieerleştirilmiş yay foksiyou dif. deklemde yerie koulursa, lieerleştirilmiş dif. deklem elde edilir. 0 1 k = df ( 0) dx x ( ) f m x + k x = 0 k x ( ) f x df ( 0) ( ) df 0 dx dx x olur. = eşitliğide. f( k x buluur.
71 Yay-kütle-damper Sistemleri k c m x(t) y Frictio-free surface x f k f c mg N Newto s kauuda: m x( t) cx ( t) mx ( t) cx ( t) kx( t) 0 x(0) f c x f k kx( t) 0, x(0) v 0
72 Söümlü Serbest Titreşim Hareket Deklemii Buluması m x + c x + k x = 0 Bu diferasiyel deklemi çözümüü x = A e s t biçimide olduğuu biliyoruz. Burada, A ve s itegrasyo sabitleridir. Çözüm kabulüü türetirsek, x = x= s A e s A e s t s t Buluur. Bular yukarıdaki diferasiyel deklemde yerie kourda,
73 ( ) st m s + c s + k A e = 0 Burada, s t A, e ¹ 0 dır. m s + c s + k = 0 s Buluur, bu dekleme karakteristik deklem deir. Karakteristik deklemi kökleri, 1, dir. c c 4mk c æ c ö k - - = =- ç - m m çèm ø m
74 Sistemi birbiride bağımsız iki gerçek kökü vardır. Bu durumda, hareket deklemi: x(t) = A e + A e st 1 s t 1 A 1 ve A başlagıç şartlarıda buluacak katsayılardır.
75 Kritik Söüm Katsayısı ve Söüm Oraı Kritik söüm katsayısı c kr aşağıdaki gibi taımlaır. æc ö kr k ç - = çèm ø m 0 k ckr = m = k m = mw m Söüm oraı ise, x = c c kr olarak taımlaır.
76 Eğer karakteristik deklem, m s + c s+ k = 0 x ve w ciside yazılırsa, c k s + s + = 0 s + xws + w = 0 m m xw w deklemi kökleri aşağıdaki gibi buluur. ( ) (-+ - ) ( ) -- - x x 1 w t x x 1 w t x t = A e + A e 1
77 1.Durum: Zayıf Söümlü Sistem c 1, c kr c, m ( x -1) Kritik altı söümlü sistemlerde egatif olur. Bu durumda, ( ) s =-+ x i 1 -x w 1 ( ) s =-- x i 1 -x w olur. Sistemi bir çift eşleik kompleks kökü olduğuda, () k m (- + - ) ( ) x i 1 x w t x i 1 x w t x t = A e + A e 1 () ( ) -xwt i 1-x w t -i 1-x w t = 1 + x t e A e A e
78 é = ë ( A ) ù cos 1-xwt -i si 1-xwt ú û -xwt () ( ê ) 1 xw xw x t e A cos 1 t i si 1- t é ù -xwt x() t = e ( A1+ A ) cos 1-xwt+ i ( A1-A ) si 1- x wt êë B1 B úû - xwt () ( = - xw ) + f x t X e si 1 t () = - xw - xwt x t X e cos 1 ( t -f )
79 = 1 + ï ïýï -1 B = ta ï B1 ïï þ X B B f üï Başlagıç şartları, olarak yazılabilir. ì x = x ï t= 0 0 í ï ïî x = x ise, t= 0 0 B B 1 0 = = x x + xwx 0 0 w 1-x olarak buluur. Bu durumda, x( t)
80 ì x x x t e ï + xw x cos 1 t si 1 t ïî w 1-x -xw () ( ) ( ) = t ï í xw + -xw ü ý ï ïþ w d = 1- dir. x w ì x x x t e ï + xw íx0cos dt si dt ïî w 1-x -xw () t 0 0 = ( w ) + ( w ) olarak buluur. ü ï ý ïþ
81 x() t a = -1 ta x 0 p Td = w d X X e -xw t x 0 t f si ( w t + f) d X e xw - - t
82 .Durum: Kritik Söümlü Sistem Katlı kök olduğuda, c k 1, ckr c, m m ckr s = s =- =-w m 1 m x+ c x + k x = 0 deklemi çözümü: ( ) ( ) x t A A t e w - t = 1+ formuda olacaktır. Başlagıç şartları, A = x 1 0 A = x + w x 0 0 ì x = x ï t= 0 0 í ï ïî x = x ise, t= 0 0 olarak buluur ve çözüm:
83 ( ) = é + ( + w ) ù x t ë x0 x0 x 0 û e w buluur. Dikkat edilirse, x( t) x > 0 0 x = t -wt t e 0 x < 0 0 t
84 3.Durum: Aşırı Söümlü Sistem m x+ c x + k x = 0 c x > > > 1, c c kr, m m k Diferasiyel deklemii karakteristik deklemi, m s + cs+ k = 0 i kökleri: ( ) s =- x x -1 w dir. 1, x> 1 x - 1 > 0 eğer, olur. Bu durumda, kökler reel ve ayrık olacaktır. Deklemi çözümü: ( ) ( ) ( -+ - ) -- - x x 1 w t x x 1 w t x t = A e + A e 1
85 Başlagıç şartları, ì x = x ï t= 0 0 í ï ïî x = x ise, t= 0 0 A A 1 = = ( ) x w x+ x x 0 0 w x - 1 ( ) -x w x- x -1 -x w x 1
86 () x t A 1 1 ( -+ - ) 1 t A e x x w t ( -- - ) 1 t A e x x w A
87 Logaritmik Azalma x() t x 1 x t
88 Logaritmik azalma, söümlü serbest titreşimlerde gelikleri azalma hızıı ifade eder ve herhagi ardışık iki gelik oraıı tabii logaritması şeklide taımlaır. () - xw t ( ) x< 1 x t = X e cos w t -f idi, taım gereği; x 1 ( ) ( ) - xwt - xwt x X e cos t e cos t d d d ( ) ( ) - xw1 t - xw1 t X e cos wdt 1-f e cos wdt1-f = = w -f w -f p t = t1+ T d Td = dir. w d p ( w - f) = é æ w + ö ù - f = ( w + p- f) = ( w -f) d d 1 d 1 d 1 ê ë çè w ø ú d û cos t cos t cos t cos t
89 - xw1 t - xw1 t x 1 e e - xw( t1+ Td) - xw1 t - x e e = xwtd e = = e xw T d Şeklide elde edilir. Logaritmik azalma d ile gösterilirse; æx ö px c p d d= ç = x w = = x= çè ø 1-x 4p + d 1 l ç T d x m wd x << 1 d» px x = d p Eğer ise, alıabilir. Bu durumda dir.
90 Eğer, ardışık iki gelik yerie, tam periyot katlarıda iki gelik verilmiş ise: x ve 1 x + gibi, 1 x1 x1 x x3 x = x+ 1 x x 3 x 4 x+ 1 x x e xwt d xwtd xwtd e ( xw e ) = = e T xwt e d d e xwtd her iki tarafı logaritması alıacak olursa, æ x ö æ ( ) dt x ö 1 æ x ö d l xw l e l xwt d l = = = çx x x è ø èç ø èç ø d d + 1
91 Logaritmik azalmaı söüm oraı ile değişimi Logaritmik azalma d x = c c kr Söüm oraı
92 Çözüm: Verileler; m, c, k, x 0, v 0 buluacak x(t) Hareket deklemii m ile bölersek x( t) = x ( t) x( t) 0 k m c söüm oraı (boyutsuz) km
93 t x( t) ae olarak kabul eder & hareket deklemide yerie koyarsak a e a e ae 0 t t t bağlı bircebrikdeklem elde edilir: 1, quadratik deklemi kökleri. 1 diskrimiat 1, köklerii karakteristiğii belirler
94 Üç Durum: , coditios : Usig the iitial ) ( = 1 called critically damped & repeated roots are equal 1 1) x v a x a te a a e t x m km c c t t cr
95 1 1) ( 1 1) ( where ) ( ) ( 1 roots : two distict real called overdampig - 1, ) , t t t x v a x v a e a a e e t x
96 3) 1, called uderdamped motio - Two complex roots as cojugate pairs write roots i complex form as : most commo 1, j 1 where j 1
97 Uderdamped 0 < < ta ) ( ) ( 1 dampedaturalfrequecy, 1 )] cos( ) si( [ = ) si( ) ( ) ( x v x x x v A t B t A e t Ae e a a e e t x d d d d d d t d t t j t j t Reduces to udamped formulas for = 0 Ae t si( d t )
98 Critically damped motio Displacemet (mm) k=5n/m m=100kg ad =1 x 0 =0.4mm v 0 =1mm/s x 0 =0.4mm v 0 =0mm/s x 0 =0.4mm v 0 =-1mm/s Time (sec)
99 Displacemet (mm) Overdamped motio k=5n/m m=100kg ad = x 0 =0.4mm v 0 =1mm/s x 0 =0.4mm v 0 =0mm/s x 0 =0.4mm v 0 =-1mm/s Time (sec)
100 Zayıf Söüm Deplasma zama(saiye)
101
102
103
104
105
106
107
108 Vuru Beatig Çalışma frekasları arasıdaki fark çok küçükse f 0 si t 1 Displacemet (x) Larger amplitude Time (sec)
109 x p What happes whe is? ( t) tx si( t) substitute ito eq. ad solve for X grows with out f X 0 f0 x( t) A1 sit A cost t si( t) Whe the drive frequecy ad atural frequecy are the same the amplitude of the vibratio grows without bouds. This is kow as a resoace coditio Displacemet (x) 5 0 boud Time (sec)
110 Harmoically Excited Systems Equatios of motio (c =0): m k m F f t f t x t x t F t kx t mx, / where ) cos( ) ( ) ( ) cos( ) ( ) (
111 Söümsüz Zorlamış Titreşim Hareket Deklemii Buluması ( w ) F= F cos t E geel halde harmoik bir dış kuvvet olsu. Hareketi diferasiyel deklemi: 0 ( w ) mx + kx = F cos t Hareket deklemii geel çözümü: Homoje çözüm: ( ) = ( ) = ( ) + ( ) x t x t x t x t g h ö ( ) = ( w ) + ( w ) x t A cos t A si t h 1 Ft ( ) x () t Uyarıcı kuvvet harmoik olduğu içi özel çözüm de ö harmoik ve ayı frekasıa sahip olacaktır. x t Xcos t ö ( ) = ( w )
112 ö ö ö ( ) = ( w ) x t Xcos t () =-w ( w ) x t Xsi t ( ) =-w ( w ) x t Xcos t 5 1 i içie koulursa; ( ) ( ) ( ) mw Xcos wt kcos wt F0 cos wt - + = F k - m X cos t = F cos t X = k-m w ( w ) ( w ) ( w ) Geel çözüm: 6 F0 x() t = A1cos( wt) + Asi( wt) + cos ( wt) 7 k - mw
113 Başlagıç şartları, A A F = x - k - mw x0 = w ì x = x ï t= 0 0 í ï ïî x = x ise, t= 0 0 olarak buluur ve geel çözüm: æ F ö x F x t x ç cos t si t cos t çè ø () = - ( w ) + ( w ) + ( w ) 0 k-mw w k-mw
114 X i w ile değişimi w F0 F0 F0 F0 X k 1 X = X = k = k = k = k-mw m 1- w w æ F0 1 w ö æ w ö - k k 1-1- çw w è ø è ç ø m w R = X k F 0 Gelik oraı veya büyütme faktörü.
115 0< w < 1 w 1.Durum: ise; ( ) = ( w ) Ft Fcos t 0 t xö ( t ) =Xcos( ωt) t
116 w 1 w >.Durum: ise; ( ) = ( w ) Ft Fcos t 0 t x t Xcos t ö ( ) = ( w ) t
117 w 1 w = 3.Durum: ise; ( ) = ( w ) Ft Fcos t 0 t xt ( ) t
118 Problem: Aşağıda dege koumudaki sistemi verile değer ve başlagıç şartlarıa bağlı olarak s içi hareketii iceleyiiz. m,e,w m cubuk, L M x k
119 Çözüm: Jj F= me w coswt kx F 0 x Mx x = L j x = L j x = Lj 1 J= mcubukl 3
120 Newto u. kauu uygulaırsa, å M = Jj Jj + Mx L =- kx L+ F L æ ö ç + + = çè3 ø 1 m cubuk L ML j kl j me w Lcos w t
121 m = 30 kg M = 300 kg m = 0.5 kg cubuk 3 e 1 m 000 d/d L m k N/m = = = = ìï x 0 = j0 = t = 0 ï í ïï ïx 0 = j0 = ïî 5p 180 8p 180
122 w p p000 = = = p rad/s 140j j= cos 66.66pt M 0 k w = = = 4.04 p rad/s m 140 æ M ö j M j j ç w w w çè ø () t = - cos( t) + si( t) + cos( t) 0 k-mw w k-mw () ( ) ( ) ( ) - j t = cos 4.04pt si 4.04pt cos 66.66pt
123
124
125 Problem: Aşağıdaki sistemi titreşim hareketii 4 s içi çiziiz. F = 500si0pt F1 = 100cos0pt m x k
126 Çözüm: F = 500si0pt m F1 = 100cos 0pt x mx kx
127 Newto u. kauu uygulaırsa, å F= ma mx =- kx + F + F 1 mx + kx = F + F 1 10x x = 100cos 0pt + 500si 0pt 500 f= f= ta = + = F N ( p ) 10x x = 773cos 0 t-64.35
128 m = 10 kg k = 5000 N/m ì x0 = t= 0 ï í ï ïî x 0 = 0.01 m 0. m/s k 5000 w = = = 4.59 p rad/s w= 0p m 10 æ F ö x F x t x ç cos t si t cos t çè ø () = - ( w ) + ( w ) + ( w -f) 0 k-mw w k-mw ( ) = ( p ) + ( p )- ( p - ) x t 0.016cos 4.59 t si 4.59 t 0.006cos 0 t 64.35
129
130
131 Söümlü Zorlamış Titreşim Hareketi diferasiyel deklemii buluması: ( w ) F= F cos t 0 m x m x m ( w ) F= F cos t 0 k c k x c x Newto u. kauua göre, S F = m a m x = -c x-k x + F m x + c x + k x = F
132 Söümlü Zorlamış Titreşim Hareket Deklemii Buluması ( w ) F= F cos t E geel halde harmoik bir dış kuvvet olsu. Hareketi diferasiyel deklemi: Hareket deklemii geel çözümü: Homoje çözüm: ( w ) mx + cx + kx = F cos t ( ) = ( ) = ( ) + ( ) x t x t x t x t g h ö ( ) = ( w ) + ( w ) x t A cos t A si t h 1 Ft ( ) x () t w Uyarıcı kuvvet harmoik olduğu içi özel çözüm de ö harmoik ve ayı frekasıa sahip olacaktır. ( ) = ( w -f) x t Xcos t ö
133 ö ö ö () = ( w -f) x t Xcos t () =-w ( w -f) x t Xsi t () =-w ( w -f) x t Xcos t 5 1 i içie koulursa; Aşağıdaki trigoometrik bağıtılar kullaılarak; 5 ( ) ( ) ( ) ( ) = é êë mw Xcos wt f cwxsi wt f k cos wt f F0 cos wt ( k-mw ) cos( wt-f) -cwsi( wt- f) X= F cos( wt) ( ) cos wt f = coswt cosfsi wt sif ( ) si wt f = si wt cosfcoswt sif ù úû 0 6 7
134 7 olu eşitlik 6 deklemie koulursa; ( ) ( ) ( ) X é k m w coswt cosf si wt sif cw si wt cosf coswt sif ù ê ú= F0 coswt ë û cost sit ve i katsayılarıı eşitlersek; ( ) Xé k mw cosf cwsifù ê - + = F ë úû Xé( k mw ) sif cwcosfù ê - - ú= 0 ë û Bu iki deklemi karelerii alalım: X é ( k mw ) cos f ( cw) si f ( k m w ) cwcosfsif ù ê ú= F ë û X é ( k mw ) si f ( cw) cos f ( k m w ) cwcosfsif ù ê ú= 0 ë û 0 ve taraf tarafa toplayalım;
135 X é ( k mw ) ( cw ù ) F X ë û 0 ê - + ú= 0 = 9 olu deklemde; = 0 F ( k- mw ) + ( cw) c X é w ( k mw ) sif cwcosfù æ ö 0 f ta -1 ê - - = = ë ú û çèk- mw ø 11 1 Geel çözüm: 13 F = w + w + w -f ( ) ( ) ( ) 0 xt Acos 1 t Asi t cos t ( k- mw ) + ( cw) ( )
136 Büyütme Oraı 11 ve 1 deklemlerii boyutsuzlaştıralım, her iki deklemi pay ve paydasıı ya bölelim: X = k F0 k æ ö æ ö mw cw 1- + ç è k ø çè k ø f ta æ cw ö k ç mw ç 1- çè k ø -1 = ç 14 w c kr x = k = m = mw c c kr Söümsüz tabii frekas Kritik söüm katsayısı Söüm oraı 15
137 15 eşitlikleri 14 deklemlerie koursa; X k 1 1 = = F0 é ù w é w ù æ ö æ ö x - w + ê w ú ê çè ø ú èç ë ø ë û û ( 1 r ) ( xr) 16 f æ w ö x ç w çè ø r x = ta = ta æ w ö 1 - r 1-ç ç ç w çè ø w r = w Burada, dir.
138 Büyütme Faktörü-Hız Oraı Değişimi. x = 0 x = 0.1 R = X k F 0 R Büyütme faktörü x = 0.15 x = 0.5 x = x = 0.5 x =1 Hız oraı r = w w
139 Faz Açısı-Hız Oraı Değişimi. x = 0 x = 0.1 x = 0. f Faz açısı [derece] x = 0.3 x = x =1 x = 0.7 x = 0.5 Hız oraı r = w w
140 Büyütme Faktörü ile Faz Açısı-Hız Oraı Arasıdaki İlişki: Söümsüz bir sistem içi; r< 1 f = 0 r = 1 f = 90 r> 1 f = 180 x = 0 Söüm, gelik oraıı tüm zorlayıcı frekas değerleride azaltır. Söümü gelik oraıı azaltması, rezoas frekasıda veya civarıda çok belirgidir. Gelik oraıı maksimumu; r= 1-x veya w = w -x d 1 değerleride meydaa gelir.
141 Zemii Hareketli Söümlü Zorlamış Hareket Hareketi diferasiyel deklemii buluması: y k c t ( ) = ( w ) yt Ysi t ( - y) cx ( - y) k x m x m x mx Newto u. kauua göre, ( ) ( ) å F = m a mx = -k x-y -c x -y mx + cx + kx = cy + ky
142 Yukarıda bulua deklemde yol foksiyou yerie koulursa, () = ( w ) y t Ysi t ( w ) w ( w ) mx + cx + kx = kysi t + c Y cos t buluur. 1 1 olu deklemi süperpoze edelim, ( w ) mx + cx + kx = ky si t ( ) = ( w -f) x t Asi t 1ö 1 () = w ( w -f) x t Acos t 1ö 1 ( ) =-w ( w -f) x t Asi t 1ö 1 3 eşitlikleri i içie koursa; 3
143 ( ) ( ) ( ) ( ) = mw A si wt f1 cwa cos wt f1 ka si wt f1 ky si wt ( - w ) é ( w ) ( f1) - ( w ) ( f1) Ak m si tcos cos tsi ù ë û 4 + cwa é ë cos wt cos f1 + si wt si f1 û = ky si wt 4 deklemi Asi t ve Acos wt paratezie alııp katsayılar eşitleirse; ( ) ( ) ( ) ( ) ù ( ) ( w ) ( ) ( k - mw ) cos( f1) + cwsi ( f1) ù Asi( wt) é êë úû +- é ê - + ú = ë û ( k m w ) si( f1) cwcos ( f1) ù Acos( wt) kysi( wt ) ( w ) ( f1) w ( f1) é k m cos c si ù ê - + A= ky ë úû é ( k m w ) si( f1) cwcos ( f1) ù ê- - + ú A= 0 ë û 6 7 5
144 olur. A¹ 0 olmak üzere, 7 olu deklemde, é ( - æ cw ö - k - m w ) si( f ) ( ) cwcos f ù 1 A = 0 f1= ta êë ú û çèk- mw ø = 0 6 ve 7 olu deklemleri kareleri alııp taraf tarafa toplaırsa; ( k- mw ) cos( f1) + cwsi ( f1) ù A = ( ky) é êë úû é ( k m w ) si( f1) cwcos ( f1) ù + ê ë ú û A = 0 é ê ë - + ù ú= = û ( w ) ( w) ( ) A k m c ky A buluur. ky 9 8 ( k- mw ) + ( cw)
145 8 ve 9 eşitlikleri 3 olu hareket deklemide yerie koulursa; ky é -1æ cw ö ù x1ö () t = si wt- ta ê çk mw ë è - øú û Bezer şekilde; ( k- mw ) + ( cw) ( w ) mx + cx + kx = cwy cos t 11 ( ) = ( w -f ) x t Bcos t ö () =-w ( w -f ) x t Bsi t ö ( ) =-w ( w -f ) x t Bcos t ö ilgili eşitliklere koup ara işlemler bezer şekilde yapılırsa; 1 10
146 f - cw = ta æ ç ö çèk- mw ø 1 B = cwy ( k- mw ) + ( cw) cwy é -1æ cw ö ù xö() t = cos wt- ta ê çk mw ë è - øú û ( k- mw ) + ( cw) -1 cw f= f1= f = ta æ ç ö çèk- mw ø Olarak buluur. Burada, dir
147 x t x () t Süperpozisyo ilkesi uyarıca her bir ve çözümüü ö toplarsak; () () () 1ö () xö t = x1ö t + xö t 17 é ù ky -1æ cw ö xö () t = si wt- ta ç ( ) çè k mw k m ( cw w ø ) ê ú ë f1 û A é ù cwy ê æ cw ö ç ( çè k mw ) k m ( cw w ø ) ê ú ë f û -1 + cos êwt - ta ç B 18
148 17 deklemi şu şekilde de, yazılabilir. ( ) = ( w - f) + ( w -f ) x t Asi t Bcos t ö 1 yada, x t Xcos t ö ( ) = ( w -f-j) 0 19 biçimide yazılabilir. Burada; X= A + B = Y k + ( cw) ( k- mw ) + ( cw) 1 j -1æAö -1æ k ö = ta = ta ç è B ø èçcw ø dir.
149 0 deklemi, 16, 1 ve eşitlikleri göz öüe alıarak tekrar yazılırsa; ( w) k + c é -1 cw -1 k ö () = êw - ç - ç æ ù x t Y cos t ta ö æ ö ta ê çk mw çcw - + ë è - ø è øú û ( k mw ) ( cw) 3
150 Problem: Aşağıdaki sistemi verile değer ve başlagıç şartlarıa bağlı olarak 5 s içi hareketii iceleyiiz. k 1 c m c x k e
151 Çözüm: k 1 x c x m c x x mx (x k y) ( w ) y= esi t y
152 Newto u. kauu uygulaırsa, å F= ma ( ) 1 1 ( ) mx =-cx -cx -k x -k x -y mx + cx + k + k x = k y ( ) ( w ) mx + cx + k + k x = k esi t 1 m = 50 kg c = 00 Ns/m k = 0000 N/m k = N/m 1 p p450 e = 0.05 m = 450 d/d w= = = 15p ( p ) 50x + 400x x = 000si 15 t
153
154 Geçici titreşim bölgesi Daimi titreşim bölgesi
155 Problem: Aşağıdaki sistemi verile değer ve başlagıç şartlarıa bağlı olarak 5 s içi hareketii iceleyiiz.
156 Yerdeğiştirme Geçirgeliği 1 olu deklemde, ( w) ( ) ( ) ( x ) k + c 1+ r X G = = = Y k- mw + cw 1- r + xr ( ) ( ) 3 bulur. é ù k + ( cw) -1æ cw ö -1æ k ö xö () t = Y cos wt ta ta - - ç ( k mw ) ( cw) k mw ç cw - + è - ø è ø ê ú ë y û
157 Yerdeğiştirme Geçirgeliği-Hız Oraı Değişimi. x = 0.05 x = 0.1 Oraı X Y x = 0.15 x = 0.5 x = x = 0.5 x =1 Hız oraı r
158 Yerdeğiştirme Geçirgeliği Faz Farkı-Hız Oraı Değişimi. x = 0.1 x = 0.05 Faz farkı y x = x = 0.5 x = 0.5 x = 0.15 Hız oraı r = w w
159 Degelememiş Sistemleri Söümlü Zorlamış Hareketi Hareketi diferasiyel deklemii buluması: e m wt x Mx mew M e m wt x k c M kx c x
160 Newto u. kauua göre, å = = ( w ) F m a mx -kx-cx-mew si t + + = w ( w ) mx cx kx me si t 1 F Burada, dir. Bezer şekilde çözüm yapılırsa, 0 = mew X = mew ( k- mw ) + ( cw) f - cw = ta æ ç ö çèk- Mw ø olarak buluur.
161 X f i ve yi boyutsuz formda yazalım. MX = m e æ ω ö ç ω çè ø é ù æ ω ö é ω ù 1- + ξ ω ê çè ê ø ú ω ú ë ë û û φ=ta -1 æ ω ö ξ ç ω çè ø æ ω ö 1- ç ω çè ø x( t ) =Xsi( ωt-φ) buluur.
162 4 olu eşitlikle-hız Oraı Değişimi. x = 0.05 x = 0.1 Oraı x = 0.15 x = 0.5 x = M m X e x = 0.5 x = 1 Hız oraı r = w w
163 Faz Açısı-Hız Oraı Değişimi. x = 0 x = 0.1 x = 0. f Faz açısı [derece] x = 0.3 x = x =1 x = 0.7 x = 0.5 Hız oraı r = w w
164 Problem: Aşağıdaki sistemi verile değer ve başlagıç şartlarıa bağlı olarak s içi hareketii iceleyiiz. k 1 c R m r r m R m,e, x M k
165 Çözüm: JRj k 1 x c x Jrj x k F= meω cos ωt x ( ) F 0 Mx
166 Newto u. kauu uygulaırsa, å M= J Top J j + J j + Mx R =-cx r-k x R- k x R+ F R r R 1 æ1 1 ö ç mr r + mrr + MR j+ crj+ k1+ k Rj= mew Rcos wt çè ø r j R ( ) ( ) m = 0 kg m = 60 kg M = 60 kg r = 0.5 m R = 1 m e = 0.1 m m = 0.05 kg = 1500 d/d c = 1400 Ns/m p p1500 k1= 5000 N/m k = N/m w= = = 50 p rad/s ( ) 9.5j + 350j j= cos 50pt
167
168 Geçici titreşim bölgesi Daimi titreşim bölgesi
169 Titreşim İzolasyou m M k,c k F M+m c x Temele geçe kuvvet F T : F = F + F F = kx F = cx T y s y s F = kx+ cx T ( w j) x= Xsi t- ( ) x = wxcos wt-j ( ) ( ) F= T kx +cωx =kx 1+ çè ω æξωö ç ø
170 é ù é ù X k 1 æ w ö æ w ö = F 0 = kx 1 x - F 0 w + w é ù ç ç w é w ù ê è ø ú êë è øúû æ ö æ ö 1 ë û x - w + ê w ú ê çè ø ú è ç ë ø ë û û m X cx F T F X kx
171 Kuvvet Geçirgeliği X F æxwö æxwö kx ç w è ø ç w è ø T G = = = = Y F 0 é ù w é w ù é æ w ö ù é æ w öù kx æ ö æ ö 1 x 1- + x ê - + w w w ê w ç ú ê ç ú çè ø çè ú ê ú ø ê è ø è ø ë úû ë û ë û ë û X F = = = ( x ) 1+ r T G Y F 0 1 r r ( - ) + ( x ) İzolasyo Iz = 1-G (%)
172 G F F T = = 0 X Y Eğer, söüm ihmal edilecek kadar küçük ise, geçirgelik G G = 1 1 æ w ö r 1-1 ç w çè ø = = - ( pf) buluur. g 1 d st -1
173 Kuvvet Geçirgeliği-Hız Oraı Değişimi. 0Oraı F F T Hız oraı r
174 Kuvvet Geçirgeliğie Ait Bazı Souçlar: r< G 1 olması halide olur. Bu durumda yalıtıcıları kullaılması yarar değil zarar getirir. r> G< 1 olması halide olur. Bu durumda yalıtıcılar, kedileride beklee yararı sağlar. Acak bu bölgede x e kadar büyükse, G de o kadar büyük olmaktadır. Bua göre söüm, yalıtıcıı yararıı azaltır. r r» 1 r» 0 G» 1 r= x r Yalıtıcıı e büyük zararı (rezoas) olması halide, e büyük yararı ise olması halide görülür. Bua karşılık (çok sert k yalıtıcı ) ve olması halide, de bağımsız olarak, olur ve yalıtıcıı hiçbir etkisi görülmez. Souç olarak; iyi bir yalıtım içi elde geldiğice büyük ise elde geldiğice küçük yapılmalıdır. x
175 Problem: Toplam 100 kg kütleli bir makia, 700 kn luk bir yay paketi ile yataklamıştır d/d ile döe degelememiş bir kütlede dolayı 350 N luk bir merkezkaç kuvvetie maruz kalmaktadır. Söüm oraı 0. kabul edilecektir. a-degelememişlikte dolayı oluşa gelik e kadardır.? b-geçirgelik edir.? c-zemie iletile kuvvet miktarı e kadardır.?
176 Çözüm: kr Sayfa 189 da olu deklem yardımı ile; X = mew ( k- mw ) + ( cw) Merkezkaç kuvveti c c x= = c = x k m = = Ns/m c k m p p3000 w= = = 100 p rad/s X= = m= mm ( ( 100p) ) + ( p)
177 Hız oraı; p p3000 w r = = 30 = 30 = w k m 100 ( x ) ( ) ( x ) ( ) F 1+ r T G = = = = ( ) ( ) F 1- r + r F T G = FT = G F 0 FT = = N F0
178 Liear ohomogeous ode: Solutio is sum of homogeous ad particular solutio The particular solutio assumes form of forcig fuctio (physically the iput wis) x p (t) X cos(t) To be determied Drivig frequecy
179 Substitute ito the equatio of motio: x p x p X cos t X cos t f 0 cos t solvig yields : X f 0 Thus the particular solutio has the form: x p f ( t) 0 cos( t)
180 Add particular ad homogeeous solutios to get geeral solutio: x(t) particular A 1 si t A cos t f 0 cost homogeeous A 1 ad A are costats of itegratio.
181 t f t f x t v t x v A x x f A x cos cos si ) ( (0) (0) Apply the iitial coditios to evaluate the costats Solvig for the costats ad substitutig ito x yields
182 . Harmoic excitatio of damped systems ow icludes a phase shift 0 0 ) cos( ) ( cos ) ( ) ( ) ( cos ) ( ) ( ) ( t X t x t f t x t x t x t F t kx t cx t mx p
183 Substitute the values of A s ad B s ito x p : x p ( t) f0 cos( t ( ) () X 1 ta ) Add homogeeous ad particular to get total solutio: x( t) t Ae si( dt ) homogeeous or trasiet solutio X cos( t ) particular or steady state solutio Note: that A ad will ot have the same values as i Ch 1, as t gets large, trasiet dies out
184 Magitude: X f 0 ( ) ( ) No dimesioal Form: Phase: Frequecy ratio: Xk F 0 X f 0 ta r1 1 r r 1 (1 r ) (r)
185 r
186
187 Radom(Gelişigüzel) Titreşimler Şu aa kadar hep düzgü salıımlı titreşimleri iceledik. Oysa çalışa bir elektrik motoruda veya otomobiliizi çalıştırdığıızda hissettiğiiz titreşimler gelişigüzel titreşimlerdir. Gerçek hayatta, eğer özel olarak yaratılmıyorsa, düzgü salııdı titreşimlere rastlamak mümkü değildir. Gelişigüzel titreşimleri harmoik salıımlar gibi belirli bir frekası ve geliği yoktur. Dolayısıyla bu titreşimlere bakarak titreşime sebep ola kuvvet hakkıda fikir yürütmek imkasızdır. Halbuki bizim titreşim aalizi ile arızala teşhis edebilmemiz içi, bu titreşimleri frekaslarıı bilmemiz gerekir. İşte bu işlem içi Fourier Döüşümü'ü kullaıyoruz.
188
189 Fourier Döüşümü iki kütlei yay sabitleri ve kütleleri farklıdır. Bu edele eğer her iki kütleyi de eşit miktarda çekip serbest olarak salıım yapmaya bırakırsak, her ikisi de farklı frekas ve gelikte titreşim yapacaktır. Bu iki farklı titreşimi topladığımız taktirde Şekilde gösterile grafiği elde ederiz. Olaya matematik yöüde bakacak olursak frekasları ve gelikleri farklı iki siüzoidal eğriyi topladığımızda, siüzoidal olmaya üçücü bir eğri elde ederiz. Eğer bu işlemi iki değil de daha fazla siüzoidal içi yapacak olursak elde edeceğimiz grafik Şekilde gösterile gibi bir eğri olacaktır. O halde eğer elimizde bu şekilde bir eğri varsa bu toplama işlemii tersii uygulayarak, bu düzesiz eğriyi düzgü siüzoidaller halide yazabiliriz. İşte bu İşleme Fourier Döüşümü adı verilir.
190
191 Fourier döüşümü vasıtası ile titreşimi siüzoidal bileşelerii bulabiliriz. Şekil- 11'de gelişigüzel bir titreşimi farklı frekas ve geliklere sahip siüzoidal bileşeleri gösterilmiştir.
192
193
194
Genel Bilgiler. Giriş Titreşimlerin Sebepleri Titreşimlerin Sonuçları Sistemlerin Titreşim Analizi Titreşim ve İnsan
 Kaynaklar: Makina Dinamiği Yıldız Teknik Üniversitesi Yayını, Prof.Necati Tahralı Prof.Dr.Faris Kaya Y.Doç.Dr.İsmail Yüksek Y.Doç.Dr.Rahmi Güçlü. Mekanik Titreşimler Ders Notları, Prof.Dr.Özgür Turhan.
Kaynaklar: Makina Dinamiği Yıldız Teknik Üniversitesi Yayını, Prof.Necati Tahralı Prof.Dr.Faris Kaya Y.Doç.Dr.İsmail Yüksek Y.Doç.Dr.Rahmi Güçlü. Mekanik Titreşimler Ders Notları, Prof.Dr.Özgür Turhan.
BİR ÇUBUĞUN MODAL ANALİZİ. A.Saide Sarıgül
 BİR ÇUBUĞUN MODAL ANALİZİ A.Saide Sarıgül DENEYİN AMACI: Akastre bir çubuğu modal parametrelerii (doğal frekas, titreşim biçimi, iç söümü) elde edilmesi. TANIMLAMALAR: Modal aaliz: Titreşe bir sistemi
BİR ÇUBUĞUN MODAL ANALİZİ A.Saide Sarıgül DENEYİN AMACI: Akastre bir çubuğu modal parametrelerii (doğal frekas, titreşim biçimi, iç söümü) elde edilmesi. TANIMLAMALAR: Modal aaliz: Titreşe bir sistemi
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Mekaik Titreşimler ve Kotrolü Makie Mühedisliği Bölümü s.selim@gtu.edu.tr 4.10.018 Söümlü tek serbestlik dereceli sistemler Serbest cisim diyagramı k c kx cx Force 0 m Ft () m F Titreşim hareketi bir başlagıç
Mekaik Titreşimler ve Kotrolü Makie Mühedisliği Bölümü s.selim@gtu.edu.tr 4.10.018 Söümlü tek serbestlik dereceli sistemler Serbest cisim diyagramı k c kx cx Force 0 m Ft () m F Titreşim hareketi bir başlagıç
Kontrol Sistemleri Tasarımı
 Kotrol Sistemleri Tasarımı Frekas Yaıtı Prof. Dr. Bület E. Plati 3 Ağustos 0 Eylül 06 Taım Kararlı bir sistemi siüs girdisie sürekli rejim yaıtı Bu taımda 3 temel boyut bulumaktadır:. Kararlı bir sistem
Kotrol Sistemleri Tasarımı Frekas Yaıtı Prof. Dr. Bület E. Plati 3 Ağustos 0 Eylül 06 Taım Kararlı bir sistemi siüs girdisie sürekli rejim yaıtı Bu taımda 3 temel boyut bulumaktadır:. Kararlı bir sistem
SÖNÜMLÜ SERBEST TİTREŞİMLER
 SÖNÜMLÜ SERBEST TİTREŞİMLER 79 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80 Sönümlü Serbest Titreşim
SÖNÜMLÜ SERBEST TİTREŞİMLER 79 Viskoz Sönümlü Titreşimler Newton un 2. kanununa göre, F = ma mx = cx kx mx + cx + kx = 0 Sönümlü serbest titreşim hareketinin diferansiyel denklemi 80 Sönümlü Serbest Titreşim
Bölüm 5: Hareket Kanunları
 Bölüm 5: Hareket Kauları Kavrama Soruları 1- Bir cismi kütlesi ile ağırlığı ayımıdır? 2- Ne zama bir cismi kütlesi sayısal değerce ağırlığıa eşit olur? 3- Eşit kollu terazi kütleyi mi yoksa ağırlığı mı
Bölüm 5: Hareket Kauları Kavrama Soruları 1- Bir cismi kütlesi ile ağırlığı ayımıdır? 2- Ne zama bir cismi kütlesi sayısal değerce ağırlığıa eşit olur? 3- Eşit kollu terazi kütleyi mi yoksa ağırlığı mı
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferasiyel Deklemler 2009 Bahar Bu bilgilere atıfta bulumak veya kullaım koşulları hakkıda bilgi içi http://ocw.mit.edu/terms web sitesii ziyaret ediiz.
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferasiyel Deklemler 2009 Bahar Bu bilgilere atıfta bulumak veya kullaım koşulları hakkıda bilgi içi http://ocw.mit.edu/terms web sitesii ziyaret ediiz.
LİNEER OLMAYAN DENKLEMLERİN SAYISAL ÇÖZÜM YÖNTEMLERİ-2
 LİNEER OLMAYAN DENKLEMLERİN SAYISAL ÇÖZÜM YÖNTEMLERİ SABİT NOKTA İTERASYONU YÖNTEMİ Bu yötemde çözüme gitmek içi f( olarak verile deklem =g( şeklie getirilir. Bir başlagıç değeri seçilir ve g ( ardışık
LİNEER OLMAYAN DENKLEMLERİN SAYISAL ÇÖZÜM YÖNTEMLERİ SABİT NOKTA İTERASYONU YÖNTEMİ Bu yötemde çözüme gitmek içi f( olarak verile deklem =g( şeklie getirilir. Bir başlagıç değeri seçilir ve g ( ardışık
BASAMAK ATLAYARAK VEYA FARKLI ZIPLAYARAK İLERLEME DURUMLARININ SAYISI
 Projesii Kousu: Bir çekirgei metre, metre veya 3 metre zıplayarak uzuluğu verile bir yolu kaç farklı şekilde gidebileceği ya da bir kişii veya (veya 3) basamak atlayarak basamak sayısı verile bir merdivei
Projesii Kousu: Bir çekirgei metre, metre veya 3 metre zıplayarak uzuluğu verile bir yolu kaç farklı şekilde gidebileceği ya da bir kişii veya (veya 3) basamak atlayarak basamak sayısı verile bir merdivei
BÖLÜM 3 YER ÖLÇÜLERİ. Doç.Dr. Suat ŞAHİNLER
 BÖLÜM 3 YER ÖLÇÜLERİ İkici bölümde verileri frekas tablolarıı hazırlaması ve grafikleri çizilmesideki esas amaç; gözlemleri doğal olarak ait oldukları populasyo dağılışıı belirlemek ve dağılışı geel özelliklerii
BÖLÜM 3 YER ÖLÇÜLERİ İkici bölümde verileri frekas tablolarıı hazırlaması ve grafikleri çizilmesideki esas amaç; gözlemleri doğal olarak ait oldukları populasyo dağılışıı belirlemek ve dağılışı geel özelliklerii
Tümevarım_toplam_Çarpım_Dizi_Seri. n c = nc i= 1 n ca i. k 1. i= r n. Σ sembolü ile bilinmesi gerekli bazı formüller : 1) k =1+ 2 + 3+...
 k =1+ 2 + 3+...") MC formülüü doğruluğuu tümevarım ilkesi ile gösterelim. www.matematikclub.com, 00 Cebir Notları Gökha DEMĐR, gdemir@yahoo.com.tr Tümevarım_toplam_Çarpım_Dizi_Seri Tümevarım Metodu : Matematikte kulladığımız
MC formülüü doğruluğuu tümevarım ilkesi ile gösterelim. www.matematikclub.com, 00 Cebir Notları Gökha DEMĐR, gdemir@yahoo.com.tr Tümevarım_toplam_Çarpım_Dizi_Seri Tümevarım Metodu : Matematikte kulladığımız
5 İKİNCİ MERTEBEDEN LİNEER DİF. DENKLEMLERİN SERİ ÇÖZÜMLERİ
 5 İKİNCİ MERTEBEDEN LİNEER DİF. DENKLEMLERİN SERİ ÇÖZÜMLERİ Bir lieer deklemi geel çözümüü bulmak homoje kısmı temel çözümlerii belirlemesie bağlıdır. Sabit katsayılı diferasiyel deklemleri temel çözümlerii
5 İKİNCİ MERTEBEDEN LİNEER DİF. DENKLEMLERİN SERİ ÇÖZÜMLERİ Bir lieer deklemi geel çözümüü bulmak homoje kısmı temel çözümlerii belirlemesie bağlıdır. Sabit katsayılı diferasiyel deklemleri temel çözümlerii
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ
 BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
0 1 2 n 1. Doğu Akdeniz Üniversitesi Matematik Bölümü Mate 322
 Bölüm 3. İkici Mertebede Lieer ve Sabit Katsaılı Diferesiel Deklemler 4 3. Geel Taımlar ( ) ( ) ( ) a ( ) + a ( ) + a ( ) +... + a ( ) + a ( ) = f ( ) () 0 şeklideki bir deklem. mertebede lieer deklem
Bölüm 3. İkici Mertebede Lieer ve Sabit Katsaılı Diferesiel Deklemler 4 3. Geel Taımlar ( ) ( ) ( ) a ( ) + a ( ) + a ( ) +... + a ( ) + a ( ) = f ( ) () 0 şeklideki bir deklem. mertebede lieer deklem
(3) Eğer f karmaşık değerli bir fonksiyon ise gerçel kısmı Ref Lebesgue. Ref f. (4) Genel karmaşık değerli bir fonksiyon için. (6.
 Eğer f karmaşık değerli bir fonksiyon ise gerçel kısmı Ref Lebesgue. Ref f. (4) Genel karmaşık değerli bir fonksiyon için. (6.") Problemler 3 i Çözümleri Problemler 3 i Çözümleri Aşağıdaki özellikleri kaıtlamaızı ve buu yaıda daha fazla soyut kaıt vermeizi isteyeceğiz. h.h. eşitliğii ölçümü sıfır ola bir kümei tümleyei üzeride eşit
Problemler 3 i Çözümleri Problemler 3 i Çözümleri Aşağıdaki özellikleri kaıtlamaızı ve buu yaıda daha fazla soyut kaıt vermeizi isteyeceğiz. h.h. eşitliğii ölçümü sıfır ola bir kümei tümleyei üzeride eşit
FREKANS CEVABI YÖNTEMLERİ FREKANS ALANI CEVABI VEYA SİNUSOİDAL GİRİŞ CEVABI
 FREKANS CEVABI YÖNEMLERİ FREKANS ALANI CEVABI VEYA SİNUSOİDAL GİRİŞ CEVABI G(s (r(t ı Laplace döüşümü; A(s B(s A(s (s p (s p L(s p C(s G(sR(s R(s R s A(s B(s R(s A(s R a C(s L B(s s s j s j s p a b b s
FREKANS CEVABI YÖNEMLERİ FREKANS ALANI CEVABI VEYA SİNUSOİDAL GİRİŞ CEVABI G(s (r(t ı Laplace döüşümü; A(s B(s A(s (s p (s p L(s p C(s G(sR(s R(s R s A(s B(s R(s A(s R a C(s L B(s s s j s j s p a b b s
DENEY 4 Birinci Dereceden Sistem
 DENEY 4 Birici Derecede Sistem DENEYİN AMACI. Birici derecede sistemi geçici tepkesii icelemek.. Birici derecede sistemi karakteristiklerii icelemek. 3. Birici derecede sistemi zama sabitii ve kararlı-durum
DENEY 4 Birici Derecede Sistem DENEYİN AMACI. Birici derecede sistemi geçici tepkesii icelemek.. Birici derecede sistemi karakteristiklerii icelemek. 3. Birici derecede sistemi zama sabitii ve kararlı-durum
MEKANİK TİTREŞİMLER DERS NOTLARI
 SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
POLİNOMLARDA İNDİRGENEBİLİRLİK. Derleyen Osman EKİZ Eskişehir Fatih Fen Lisesi 1. GİRİŞ
 POLİNOMLARDA İNDİRGENEBİLİRLİK Derleye Osma EKİZ Eskişehir Fatih Fe Lisesi. GİRİŞ Poliomları idirgeebilmesi poliomları sıfırlarıı bulmada oldukça öemlidir. Şimdi poliomları idirgeebilmesi ile ilgili bazı
POLİNOMLARDA İNDİRGENEBİLİRLİK Derleye Osma EKİZ Eskişehir Fatih Fe Lisesi. GİRİŞ Poliomları idirgeebilmesi poliomları sıfırlarıı bulmada oldukça öemlidir. Şimdi poliomları idirgeebilmesi ile ilgili bazı
POLİNOMLAR. reel sayılar ve n doğal sayı olmak üzere. n n. + polinomu kısaca ( ) 2 3 n. ifadeleri polinomun terimleri,
 2 3 n. ifadeleri polinomun terimleri,") POLİNOMLAR Taım : a0, a, a,..., a, a reel sayılar ve doğal sayı olmak üzere P x = a x + a x +... + a x + a x + a biçimideki ifadelere x e bağlı reel katsayılı poliom (çok terimli) deir. 0 a 0 ax + a x
POLİNOMLAR Taım : a0, a, a,..., a, a reel sayılar ve doğal sayı olmak üzere P x = a x + a x +... + a x + a x + a biçimideki ifadelere x e bağlı reel katsayılı poliom (çok terimli) deir. 0 a 0 ax + a x
PROJE RAPORU. PROJENİN ADI: Karmaşık Sayıların n. Dereceden Kökler Toplamı ve Trigonometrik Yansımaları
 PROJE RAPORU PROJENİN ADI: Karmaşık Sayıları. Derecede Kökler Toplamı ve Trigoometrik Yasımaları PROJENİN AMACI: Karmaşık sayıı karekökleri toplamı sıfırdır. Peki. derecede kök toplamı içi de geçerli miydi?
PROJE RAPORU PROJENİN ADI: Karmaşık Sayıları. Derecede Kökler Toplamı ve Trigoometrik Yasımaları PROJENİN AMACI: Karmaşık sayıı karekökleri toplamı sıfırdır. Peki. derecede kök toplamı içi de geçerli miydi?
6. BÖLÜM VEKTÖR UZAYI VEKTÖR UZAYI VEKTÖR UZAYLARI
 6. BÖLÜM VEKTÖR LARI -BOYUTLU (ÖKLİT) I Taım: Eğer pozitif bir tam sayı ise sıralı -sayı, gerçel sayılar kümesideki adet sayıı (a 1, a 2,, a ) bir dizisidir. Tüm sıralı -sayılarıı kümesi -boyutlu uzay
6. BÖLÜM VEKTÖR LARI -BOYUTLU (ÖKLİT) I Taım: Eğer pozitif bir tam sayı ise sıralı -sayı, gerçel sayılar kümesideki adet sayıı (a 1, a 2,, a ) bir dizisidir. Tüm sıralı -sayılarıı kümesi -boyutlu uzay
İşlenmemiş veri: Sayılabilen yada ölçülebilen niceliklerin gözlemler sonucu elde edildiği hali ile derlendiği bilgiler.
 OLASILIK VE İSTATİSTİK DERSLERİ ÖZET NOTLARI İstatistik: verileri toplaması, aalizi, suulması ve yorumlaması ile ilgili ilkeleri ve yötemleri içere ve bu işlemleri souçlarıı probabilite ilkelerie göre
OLASILIK VE İSTATİSTİK DERSLERİ ÖZET NOTLARI İstatistik: verileri toplaması, aalizi, suulması ve yorumlaması ile ilgili ilkeleri ve yötemleri içere ve bu işlemleri souçlarıı probabilite ilkelerie göre
MÜHENDİSLİK MEKANİĞİ (STATİK)
") MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Meti OLGUN Akara Üiversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiği temel ilkeleri 2-3 Düzlem kuvvetler
MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Meti OLGUN Akara Üiversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiği temel ilkeleri 2-3 Düzlem kuvvetler
ÇOK SERBESTLĐK DERECELĐ SĐSTEMLERĐN ZAMAN TANIM ARALIĞINDA DĐNAMĐK ANALĐZĐ
 DOKUZ EYLÜL ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ ÇOK SERBESTLĐK DERECELĐ SĐSTEMLERĐN ZAMAN TANIM ARALIĞINDA DĐNAMĐK ANALĐZĐ Kerem GÜRBÜZ Hazira, 011 ĐZMĐR ÇOK SERBESTLĐK DERECELĐ SĐSTEMLERĐN ZAMAN TANIM
DOKUZ EYLÜL ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ ÇOK SERBESTLĐK DERECELĐ SĐSTEMLERĐN ZAMAN TANIM ARALIĞINDA DĐNAMĐK ANALĐZĐ Kerem GÜRBÜZ Hazira, 011 ĐZMĐR ÇOK SERBESTLĐK DERECELĐ SĐSTEMLERĐN ZAMAN TANIM
1. GRUPLAR. 2) Aşağıdaki kümelerin verilen işlem altında bir grup olup olmadığını belirleyiniz.
 Aşağıdaki kümelerin verilen işlem altında bir grup olup olmadığını belirleyiniz.") Sorular ve Çözümleri 1. GRUPLAR 1) G bir grup olmak üzere aşağıdaki eşitlikleri gösteriiz. i) e G birim elema olmak üzere e 1 = e. ii) a G olmak üzere (a 1 ) 1 = a. iii) a 1, a 2,, a G içi (a 1 a 2 a )
Sorular ve Çözümleri 1. GRUPLAR 1) G bir grup olmak üzere aşağıdaki eşitlikleri gösteriiz. i) e G birim elema olmak üzere e 1 = e. ii) a G olmak üzere (a 1 ) 1 = a. iii) a 1, a 2,, a G içi (a 1 a 2 a )
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
35 Yay Dalgaları. Test 1'in Çözümleri. Yanıt B dir.
 35 Yay Dalgaları 1 Test 1'i Çözümleri 1. dalga üreteci 3. m 1 2m 2 Türdeş bir yayı her tarafıı kalılığı ayıdır. tma türdeş yay üzeride ilerlerke dalga boyu ve hızı değişmez. İlk üretile ı geişliği büyük,
35 Yay Dalgaları 1 Test 1'i Çözümleri 1. dalga üreteci 3. m 1 2m 2 Türdeş bir yayı her tarafıı kalılığı ayıdır. tma türdeş yay üzeride ilerlerke dalga boyu ve hızı değişmez. İlk üretile ı geişliği büyük,
2.2. Fonksiyon Serileri
 2.2. Foksiyo Serileri Taım.. Herhagi bir ( u (x reel (gerçel değerli foksiyo dizisi verilsi. Bu m foksiyo dizisii tüm terimlerii toplamıa, yai u m (x + u m+ (x + u m+2 (x + u m+3 (x + + u m+ (x + = k=m
2.2. Foksiyo Serileri Taım.. Herhagi bir ( u (x reel (gerçel değerli foksiyo dizisi verilsi. Bu m foksiyo dizisii tüm terimlerii toplamıa, yai u m (x + u m+ (x + u m+2 (x + u m+3 (x + + u m+ (x + = k=m
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
SİSTEMLERİN ZAMAN CEVABI
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MM306 SİSTEM DİNAMİĞİ SİSTEMLERİN ZAMAN CEVABI Kutuplar, Sıfırlar ve Zama Cevabı Kavramı Birici Mertebede Sistemleri Zama Cevabı İkici
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MM306 SİSTEM DİNAMİĞİ SİSTEMLERİN ZAMAN CEVABI Kutuplar, Sıfırlar ve Zama Cevabı Kavramı Birici Mertebede Sistemleri Zama Cevabı İkici
AKIŞKAN BORUSU ve VANTİLATÖR DENEYİ
 AKIŞKA BORUSU ve ATİLATÖR DEEYİ. DEEYİ AMACI a) Lüle ile debi ölçmek, b) Dairesel kesitli bir borudaki türbülaslı akış şartlarıda hız profili ve eerji kayıplarıı deeysel olarak belirlemek ve literatürde
AKIŞKA BORUSU ve ATİLATÖR DEEYİ. DEEYİ AMACI a) Lüle ile debi ölçmek, b) Dairesel kesitli bir borudaki türbülaslı akış şartlarıda hız profili ve eerji kayıplarıı deeysel olarak belirlemek ve literatürde
İÇİNDEKİLER. Ön Söz Polinomlar II. ve III. Dereceden Denklemler Parabol II. Dereceden Eşitsizlikler...
 İÇİNDEKİLER Ö Söz... Poliomlar... II. ve III. Derecede Deklemler... Parabol... 9 II. Derecede Eşitsizlikler... 8 Trigoometri... 8 Logaritma... 59 Toplam ve Çarpım Sembolü... 7 Diziler... 79 Özel Taımlı
İÇİNDEKİLER Ö Söz... Poliomlar... II. ve III. Derecede Deklemler... Parabol... 9 II. Derecede Eşitsizlikler... 8 Trigoometri... 8 Logaritma... 59 Toplam ve Çarpım Sembolü... 7 Diziler... 79 Özel Taımlı
İstatistik ve Olasılık
 İstatistik ve Olasılık Ders 3: MERKEZİ EĞİLİM VE DAĞILMA ÖLÇÜLERİ Prof. Dr. İrfa KAYMAZ Taım Araştırma souçlarıı açıklamasıda frekas tablosu ve poligou isteile bilgiyi her zama sağlamayabilir. Verileri
İstatistik ve Olasılık Ders 3: MERKEZİ EĞİLİM VE DAĞILMA ÖLÇÜLERİ Prof. Dr. İrfa KAYMAZ Taım Araştırma souçlarıı açıklamasıda frekas tablosu ve poligou isteile bilgiyi her zama sağlamayabilir. Verileri
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
TOPOLOJİK TEMEL KAVRAMLAR
 TOPOLOJİK TEMEL KAVRAMLAR 1.1. Kümeler ve Foksiyolar A ı bir elemaıa B i yalız bir elemaıı eşleye bağıtıya bir foksiyo deir. f : A B, Domf = U A ve ragef B dir. Taım 1.1.1. f : A B foksiyou içi V A olsu.
TOPOLOJİK TEMEL KAVRAMLAR 1.1. Kümeler ve Foksiyolar A ı bir elemaıa B i yalız bir elemaıı eşleye bağıtıya bir foksiyo deir. f : A B, Domf = U A ve ragef B dir. Taım 1.1.1. f : A B foksiyou içi V A olsu.
SAÜ. Mühendislik Fakültesi Endüstri Mühendisliği Bölümü DİFERENSİYEL DENKLEMLER Dönemi Ders Notları. Prof. Dr.
 SAÜ. Mühedislik Fakültesi Edüstri Mühedisliği Bölümü DİFERENSİYEL DENKLEMLER - Döemi Ders Notları Pro. Dr. Cemaletti KUBAT .Çok Değişkeli Foksiolarda Talor-McLauri Açılımları, Ekstremum Noktalar..Talor-McLauri
SAÜ. Mühedislik Fakültesi Edüstri Mühedisliği Bölümü DİFERENSİYEL DENKLEMLER - Döemi Ders Notları Pro. Dr. Cemaletti KUBAT .Çok Değişkeli Foksiolarda Talor-McLauri Açılımları, Ekstremum Noktalar..Talor-McLauri
Düzgün olmayan dairesel hareket
 Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Bir Rasgele Değişkenin Fonksiyonunun Olasılık Dağılımı
 5.Ders Döüşümler Bir Rasgele Değişkei Foksiyouu Olasılık Dağılımı Bu kısımda olasılık dağılımı bilie bir rasgele değişkei foksiyoları ola rasgele değişkeleri olasılık dağılımlarıı buluması ile ilgileeceğiz.
5.Ders Döüşümler Bir Rasgele Değişkei Foksiyouu Olasılık Dağılımı Bu kısımda olasılık dağılımı bilie bir rasgele değişkei foksiyoları ola rasgele değişkeleri olasılık dağılımlarıı buluması ile ilgileeceğiz.
SAÜ. Mühendislik Fakültesi Endüstri Mühendisliği Bölümü DİFERENSİYEL DENKLEMLER Dönemi Karma Eğitim Ders Notları. Doç. Dr.
 SAÜ. Mühedislik Fakültesi Edüstri Mühedisliği Bölümü DİFERENSİYEL DENKLEMLER 9- Döemi Karma Eğitim Ders Notları Doç. Dr. Cemaletti KUBAT .Çok Değişkeli Foksiolarda Talor-McLauri Açılımları, Ekstremum Noktalar..Talor-McLauri
SAÜ. Mühedislik Fakültesi Edüstri Mühedisliği Bölümü DİFERENSİYEL DENKLEMLER 9- Döemi Karma Eğitim Ders Notları Doç. Dr. Cemaletti KUBAT .Çok Değişkeli Foksiolarda Talor-McLauri Açılımları, Ekstremum Noktalar..Talor-McLauri
BASİT HARMONİK HAREKET
 BASİT HARMONİK HAREKET Bir doğru üzerinde bulunan iki nokta arasında periyodik olarak yer değiştirme ve ivmesi değişen hareketlere basit harmonik hareket denir. Sarmal yayın ucuna bağlanmış bir cismin
BASİT HARMONİK HAREKET Bir doğru üzerinde bulunan iki nokta arasında periyodik olarak yer değiştirme ve ivmesi değişen hareketlere basit harmonik hareket denir. Sarmal yayın ucuna bağlanmış bir cismin
f n dµ = lim gerçeklenir. Gösteriniz (Bu teorem Monoton yakınsaklık teoreminde yakınsaklık f n = f ve (f n ) monoton artan dizi
 monoton artan dizi") 4.2. Pozitif Foksiyoları İtegrali SOU : f ), M +, A) kümeside bulua foksiyoları mooto arta dizisi ve h.h.h. f = f ise f dµ = f dµ gerçekleir. Gösteriiz Bu teorem Mooto yakısaklık teoremide yakısaklık yerie
4.2. Pozitif Foksiyoları İtegrali SOU : f ), M +, A) kümeside bulua foksiyoları mooto arta dizisi ve h.h.h. f = f ise f dµ = f dµ gerçekleir. Gösteriiz Bu teorem Mooto yakısaklık teoremide yakısaklık yerie
Tahmin Edici Elde Etme Yöntemleri
 6. Ders Tahmi Edici Elde Etme Yötemleri Öceki derslerde ve ödevlerde U(0; ) ; = (0; ) da¼g l m da, da¼g l m üst s r ola parametresi içi tahmi edici olarak : s ra istatisti¼gi ve öreklem ortalamas heme
6. Ders Tahmi Edici Elde Etme Yötemleri Öceki derslerde ve ödevlerde U(0; ) ; = (0; ) da¼g l m da, da¼g l m üst s r ola parametresi içi tahmi edici olarak : s ra istatisti¼gi ve öreklem ortalamas heme
Hata! Yer işareti tanımlanmamış. Hata! Yer işareti tanımlanmamış. Hata! Yer işareti tanımlanmamış. Hata! Yer işareti tanımlanmamış.
 İÇİNDEKİLER MOTOR KONTROL SİSTEMLERİ VE TEMEL MEKANİK BİLGİLER... Hata! Yer işareti taımlamamış.. GİRİŞ... Hata! Yer işareti taımlamamış.. HAREKET ŞEKİLLERİ... Hata! Yer işareti taımlamamış... Doğrusal
İÇİNDEKİLER MOTOR KONTROL SİSTEMLERİ VE TEMEL MEKANİK BİLGİLER... Hata! Yer işareti taımlamamış.. GİRİŞ... Hata! Yer işareti taımlamamış.. HAREKET ŞEKİLLERİ... Hata! Yer işareti taımlamamış... Doğrusal
Kuyruk Teorisi Ders Notları: Bazı Kuyruk Modelleri
 uyruk Teorisi Ders Notları: Bazı uyruk Modelleri Mehmet YILMAZ mehmetyilmaz@akara.edu.tr 10 ASIM 2017 11. HAFTA 6 Çok kaallı, solu N kapasiteli, kuyruk sistemi M/M//N/ Birimleri sisteme gelişleri arasıdaki
uyruk Teorisi Ders Notları: Bazı uyruk Modelleri Mehmet YILMAZ mehmetyilmaz@akara.edu.tr 10 ASIM 2017 11. HAFTA 6 Çok kaallı, solu N kapasiteli, kuyruk sistemi M/M//N/ Birimleri sisteme gelişleri arasıdaki
n, 1 den büyük bir sayma sayısı olmak üzere,
 KÖKLÜ SAYILAR, de üyük ir sayma sayısı olmak üzere, x = α deklemii sağlaya x sayısıa α ı yici derecede kökü deir. x m = x m O halde tersi düşüülürse, ir üslü sayıı üssü kesirli ise, o sayı köklü sayı içimide
KÖKLÜ SAYILAR, de üyük ir sayma sayısı olmak üzere, x = α deklemii sağlaya x sayısıa α ı yici derecede kökü deir. x m = x m O halde tersi düşüülürse, ir üslü sayıı üssü kesirli ise, o sayı köklü sayı içimide
Fizik 101: Ders 23 Gündem
 Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Makine Elemanları II Prof. Dr. Akgün ALSARAN. Temel bilgiler ve örnekler Güç ve hareket iletimi
 Makie Elemaları II Prof. Dr. Akgü ALSARAN Temel bilgiler ve örekler Güç ve hareket iletimi İçerik Güç ve Hareket İletimi Redüktör Vites kutusu Örek 2 Giriş 3 Bir eerjiyi, mekaik eerjiye döüştürmek içi
Makie Elemaları II Prof. Dr. Akgü ALSARAN Temel bilgiler ve örekler Güç ve hareket iletimi İçerik Güç ve Hareket İletimi Redüktör Vites kutusu Örek 2 Giriş 3 Bir eerjiyi, mekaik eerjiye döüştürmek içi
Diziler ve Seriler ÜNİTE. Amaçlar. İçindekiler. Yazar Prof.Dr. Vakıf CAFEROV
 Diziler ve Seriler Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 7 Amaçlar Bu üiteyi çalıştıkta sora; dizi kavramıı taıyacak, dizileri yakısaklığıı araştırabilecek, sosuz toplamı alamıı bilecek, serileri yakısaklığıı
Diziler ve Seriler Yazar Prof.Dr. Vakıf CAFEROV ÜNİTE 7 Amaçlar Bu üiteyi çalıştıkta sora; dizi kavramıı taıyacak, dizileri yakısaklığıı araştırabilecek, sosuz toplamı alamıı bilecek, serileri yakısaklığıı
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
MEKANİK TİTREŞİMLER. (Dynamics of Machinery, Farazdak Haideri, 2007)
") MEKANİK TİTREŞİMLER TİTREŞİM ÖLÇÜMÜ: Titeşim ölçümü oldukça kapsamlı bi koudu ve mekaik, elektik ve elektoik bilgisi içeiklidi. Titeşim ölçümleide titeşim geliği (ye değiştime-displacemet, hız-velocity
MEKANİK TİTREŞİMLER TİTREŞİM ÖLÇÜMÜ: Titeşim ölçümü oldukça kapsamlı bi koudu ve mekaik, elektik ve elektoik bilgisi içeiklidi. Titeşim ölçümleide titeşim geliği (ye değiştime-displacemet, hız-velocity
İstatistik ve Olasılık
 İstatistik ve Olasılık Ders 3: MERKEZİ EĞİLİM VE DAĞILMA ÖLÇÜLERİ Prof. Dr. İrfa KAYMAZ Taım Araştırma souçlarıı açıklamasıda frekas tablosu ve poligou isteile bilgiyi her zama sağlamayabilir. Verileri
İstatistik ve Olasılık Ders 3: MERKEZİ EĞİLİM VE DAĞILMA ÖLÇÜLERİ Prof. Dr. İrfa KAYMAZ Taım Araştırma souçlarıı açıklamasıda frekas tablosu ve poligou isteile bilgiyi her zama sağlamayabilir. Verileri
Genel Kimya ve 4. Şubeler
 Geel Kimya 101 3. ve 4. Şubeler Dr. Oza Karaltı E-mail : okaralti@etu.edu.tr Ofis: 112-2 https://sites.google.com/site/etukim101 6. Gazlar Gazları fiziksel davraışlarıı 4 özellik belirler. Sıcaklık (K),
Geel Kimya 101 3. ve 4. Şubeler Dr. Oza Karaltı E-mail : okaralti@etu.edu.tr Ofis: 112-2 https://sites.google.com/site/etukim101 6. Gazlar Gazları fiziksel davraışlarıı 4 özellik belirler. Sıcaklık (K),
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
Öğrenci Numarası İmzası: Not Adı ve Soyadı
 Öğreci Numarası İmzası: Not Adı ve Soyadı SORU 1. a) Ekoomii taımıı yapıız, amaçlarıı yazıız. Tam istihdam ile ekoomik büyüme arasıdaki ilişkiyi açıklayıız. b) Arz-talep kauu edir? Arz ve talep asıl artar
Öğreci Numarası İmzası: Not Adı ve Soyadı SORU 1. a) Ekoomii taımıı yapıız, amaçlarıı yazıız. Tam istihdam ile ekoomik büyüme arasıdaki ilişkiyi açıklayıız. b) Arz-talep kauu edir? Arz ve talep asıl artar
AYRIK DALGACIK DÖNÜŞÜMÜ İLE GÜRÜLTÜ SÜZME
 AYRIK DALGACIK DÖNÜŞÜMÜ İLE GÜRÜLTÜ SÜZME Fahri VATANSEVER 1 Ferudu UYSAL Adullah UZUN 3 1 Sakarya Üiversitesi, Tekik Eğitim Fakültesi, Elektroik-Bilgisayar Eğitimi Bölümü, 54187 Esetepe Kampüsü/SAKARYA
AYRIK DALGACIK DÖNÜŞÜMÜ İLE GÜRÜLTÜ SÜZME Fahri VATANSEVER 1 Ferudu UYSAL Adullah UZUN 3 1 Sakarya Üiversitesi, Tekik Eğitim Fakültesi, Elektroik-Bilgisayar Eğitimi Bölümü, 54187 Esetepe Kampüsü/SAKARYA
sorusu akla gelebilir. Örneğin, O noktasından A noktasına hareket, OA sembolü ile gösterilir
 BÖLÜM 1: VEKTÖRLER Vektörleri taımlamak içi iki yol vardır: uzayda oktalara karşılık gele bir koordiat sistemideki oktalar veya büyüklük ve yöü ola eseler. Bu kısımda, ede iki vektör taımıı buluduğu açıklaacak
BÖLÜM 1: VEKTÖRLER Vektörleri taımlamak içi iki yol vardır: uzayda oktalara karşılık gele bir koordiat sistemideki oktalar veya büyüklük ve yöü ola eseler. Bu kısımda, ede iki vektör taımıı buluduğu açıklaacak
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
SAYISAL ÇÖZÜMLEME. Sayısal Çözümleme
 SAYISAL ÇÖZÜMLEME Saısal Çözümleme SAYISAL ÇÖZÜMLEME 8. Hafta İNTERPOLASYON Saısal Çözümleme 2 İÇİNDEKİLER Ara Değer Hesabı İterpolaso Doğrusal Ara Değer Hesabı MATLAB ta İterpolaso Komutuu Kullaımı Lagrace
SAYISAL ÇÖZÜMLEME Saısal Çözümleme SAYISAL ÇÖZÜMLEME 8. Hafta İNTERPOLASYON Saısal Çözümleme 2 İÇİNDEKİLER Ara Değer Hesabı İterpolaso Doğrusal Ara Değer Hesabı MATLAB ta İterpolaso Komutuu Kullaımı Lagrace
(m+2) +5<0. 7/m+3 + EŞİTSİZLİKLER A. TANIM
 +5<0. 7/m+3 + EŞİTSİZLİKLER A. TANIM") EŞİTSİZLİKLER A. TANIM f(x)>0, f(x) - eşitsizliğinin
EŞİTSİZLİKLER A. TANIM f(x)>0, f(x) - eşitsizliğinin
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
M Ü H E N D İ S L E R İ Ç İ N S AY I S A L YÖ N T E M L E R
 İ H S A N T İ M U Ç İ N D O L A P C İ, Y İ Ğ İ T A K S O Y M Ü H E N D İ S L E R İ Ç İ N S AY I S A L YÖ N T E M L E R P U B L I S H E R O F T H I S B O O K Copyright 13 İHSAN TİMUÇİN DOLAPCİ, YİĞİT AKSOY
İ H S A N T İ M U Ç İ N D O L A P C İ, Y İ Ğ İ T A K S O Y M Ü H E N D İ S L E R İ Ç İ N S AY I S A L YÖ N T E M L E R P U B L I S H E R O F T H I S B O O K Copyright 13 İHSAN TİMUÇİN DOLAPCİ, YİĞİT AKSOY
Sistem Modellerinin Zaman Cevabı ve Performans Kriterleri
 Korol Siemleri Taarımı Siem Modellerii Zama Cevabı ve Performa Krierleri Prof.Dr. Galip Caever Korol Siemleri Taarımı Prof.Dr.Galip Caever Kapalı dögü iemi oluşurulmaıda öce iem modelide geçici rejim cevabıı
Korol Siemleri Taarımı Siem Modellerii Zama Cevabı ve Performa Krierleri Prof.Dr. Galip Caever Korol Siemleri Taarımı Prof.Dr.Galip Caever Kapalı dögü iemi oluşurulmaıda öce iem modelide geçici rejim cevabıı
MEKANĠK TĠTREġĠMLER DENEYĠ
 MK-LB00 MEKNĠK TĠTREġĠMLER DENEYĠ. DENEYĠN MCI Mekanik titreşimler deneyi titreşim teorisi bilgilerinin daha iyi kavranmasına yardımcı olmak ve deneysel beceri kazandırmak amacıyla yapılmaktadır.. DENEY
MK-LB00 MEKNĠK TĠTREġĠMLER DENEYĠ. DENEYĠN MCI Mekanik titreşimler deneyi titreşim teorisi bilgilerinin daha iyi kavranmasına yardımcı olmak ve deneysel beceri kazandırmak amacıyla yapılmaktadır.. DENEY
Analiz II Çalışma Soruları-2
 Aaliz II Çalışma Soruları- So gücelleme: 04040 (I Aşağıdaki foksiyoları (ilgili değişkelere göre türevlerii buluuz 7 cos π 8 log (si π ( si ta e 9 4 5 6 + cot 0 sec sit t si( e + e arccos ( e cos(ta (II
Aaliz II Çalışma Soruları- So gücelleme: 04040 (I Aşağıdaki foksiyoları (ilgili değişkelere göre türevlerii buluuz 7 cos π 8 log (si π ( si ta e 9 4 5 6 + cot 0 sec sit t si( e + e arccos ( e cos(ta (II
T.C SELÇUK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
 .C SELÇUK ÜNİVERSİESİ FEN BİLİMLERİ ENSİÜSÜ CHEBYSHEV POLİNOMLARI VE BAZI UYGULAMALARI NEJLA ÇALIK YÜKSEK LİSANS EZİ İLKÖĞREİM ANABİLİM DALI KONYA, 00 ÖZE YÜKSEK LİSANS EZİ CHEBYSHEV POLİNOMLARI VE BAZI
.C SELÇUK ÜNİVERSİESİ FEN BİLİMLERİ ENSİÜSÜ CHEBYSHEV POLİNOMLARI VE BAZI UYGULAMALARI NEJLA ÇALIK YÜKSEK LİSANS EZİ İLKÖĞREİM ANABİLİM DALI KONYA, 00 ÖZE YÜKSEK LİSANS EZİ CHEBYSHEV POLİNOMLARI VE BAZI
HARDY-CROSS METODU VE UYGULANMASI
 HRY-ROSS MTOU V UYGUNMSI ğ şebekelerde debi bir oktaya çeşitli yollarda gelebildiği içi, şebekei er agi bir borusua suyu agi yolda geldiğii ilk bakışta söyleyebilmek geellikle mümkü değildir. Çözümleme
HRY-ROSS MTOU V UYGUNMSI ğ şebekelerde debi bir oktaya çeşitli yollarda gelebildiği içi, şebekei er agi bir borusua suyu agi yolda geldiğii ilk bakışta söyleyebilmek geellikle mümkü değildir. Çözümleme
Soru 1. Cisim dengede ise F¹ ve F² nedir? F¹ = 50.cos 53 = 30N F² = 50.sin 53 = 40N. Soru 2. P² = 8+16 = 24N P³ = 12-6 = 6N
 DENGE VE DENGE ŞARTLARI Bir cisim duruyorsa veya düzgün hızla bir doğru boyunca hareket ediyorsa ya da sabir hızla bir eksen etrafında dönüyorsa ``cisim dengededir`` denir. Cisim olduğu yerde duruyorsa,
DENGE VE DENGE ŞARTLARI Bir cisim duruyorsa veya düzgün hızla bir doğru boyunca hareket ediyorsa ya da sabir hızla bir eksen etrafında dönüyorsa ``cisim dengededir`` denir. Cisim olduğu yerde duruyorsa,
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
ORTALAMA EŞĐTSĐZLĐKLERĐNE GĐRĐŞ
 ORTALAMA EŞĐTSĐZLĐKLERĐNE GĐRĐŞ Lokma Gökçe Olimpiyat problemlerii çözümüde eşitsizlik teorisi öemli bir yer tutar. Baze bir maksimum miimum değer problemide, baze bir geometrik eşitsizlik kaıtıda, baze
ORTALAMA EŞĐTSĐZLĐKLERĐNE GĐRĐŞ Lokma Gökçe Olimpiyat problemlerii çözümüde eşitsizlik teorisi öemli bir yer tutar. Baze bir maksimum miimum değer problemide, baze bir geometrik eşitsizlik kaıtıda, baze
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
DEÜ MÜHENDİSLİK FAKÜLTESİ FEN ve MÜHENDİSLİK DERGİSİ Cilt: 6 Sayı: 1 sh Ocak 2004
 DEÜ MÜHENDİSLİK FAKÜLTESİ FEN ve MÜHENDİSLİK DERGİSİ Cilt: 6 Sayı: 1 sh. 129-138 Ocak 2004 CEBİRSEL KATSAYILI HOMOJEN DİFERANSİYEL DENKLEMLERİN FARK DENKLEMLERİ İLE ÇÖZÜMÜ (SOLUTION OF HOMEGENEOUS DIFFERANTIAL
DEÜ MÜHENDİSLİK FAKÜLTESİ FEN ve MÜHENDİSLİK DERGİSİ Cilt: 6 Sayı: 1 sh. 129-138 Ocak 2004 CEBİRSEL KATSAYILI HOMOJEN DİFERANSİYEL DENKLEMLERİN FARK DENKLEMLERİ İLE ÇÖZÜMÜ (SOLUTION OF HOMEGENEOUS DIFFERANTIAL
Bölüm- Parametrik Hesap
 MAK 0: İNAMİK r. Ahmet Tşkese Fil hzırlık ölüm- Prmetrik Hesp 1 ölüm-rijit Cisim Sbit merk. Etr. döme * θ = 6 devir dödüğüde 4(6=3θ C θ C = 8 devir 8(5=4.5(θ A θ A = 8.889 devir α A =rd/s ω A = t + 5 rd/s
MAK 0: İNAMİK r. Ahmet Tşkese Fil hzırlık ölüm- Prmetrik Hesp 1 ölüm-rijit Cisim Sbit merk. Etr. döme * θ = 6 devir dödüğüde 4(6=3θ C θ C = 8 devir 8(5=4.5(θ A θ A = 8.889 devir α A =rd/s ω A = t + 5 rd/s
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Fizik 101: Ders 21 Gündem
 Fizik 101: Ders 21 Gündem Yer çekimi nedeninden dolayı tork Rotasyon (özet) Statik Bayırda bir araba Statik denge denklemleri Örnekler Asılı tahterevalli Asılı lamba Merdiven Ders 21, Soru 1 Rotasyon Kütleleri
Fizik 101: Ders 21 Gündem Yer çekimi nedeninden dolayı tork Rotasyon (özet) Statik Bayırda bir araba Statik denge denklemleri Örnekler Asılı tahterevalli Asılı lamba Merdiven Ders 21, Soru 1 Rotasyon Kütleleri
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
3.2.3 DC Şönt Motora Yolverme... 58 3.2.4 DC Şönt Motorun Devir Sayısı Ayar Metotları... 63 3.2.5 DC Şönt Motorun Dönüş Yönünün Değiştirilmesi...
 İÇİNDEKİLER ELEKTRİKLE TAHRİKİN TANII VE TEEL EKANİK BİLGİLER.... GİRİŞ.... ELEKTRİKLE TAHRİKTE HAREKET ŞEKİLLERİ..... Doğrusal Hareket..... Döer Hareket... 4.3 HAREKET OLAYLARININ KİNETİĞİ... 6.4 BİRİ
İÇİNDEKİLER ELEKTRİKLE TAHRİKİN TANII VE TEEL EKANİK BİLGİLER.... GİRİŞ.... ELEKTRİKLE TAHRİKTE HAREKET ŞEKİLLERİ..... Doğrusal Hareket..... Döer Hareket... 4.3 HAREKET OLAYLARININ KİNETİĞİ... 6.4 BİRİ
1. Tabanı 2a büyük eksenli, 2b küçük eksenli elips ile sınırlanan ve büyük eksene dik her kesiti kare olan cismin 16ab 2 hacmini bulunuz.
 MAT -MATEMATİK (5-5 YAZ DÖNEMİ) ÇALIŞMA SORULARI. Tabaı a büyük ekseli, b küçük ekseli elips ile sıırlaa ve büyük eksee dik her kesiti kare ola cismi 6ab hacmii buluuz. Cevap :. y = ve y = eğrileri ile
MAT -MATEMATİK (5-5 YAZ DÖNEMİ) ÇALIŞMA SORULARI. Tabaı a büyük ekseli, b küçük ekseli elips ile sıırlaa ve büyük eksee dik her kesiti kare ola cismi 6ab hacmii buluuz. Cevap :. y = ve y = eğrileri ile
5. BORULARDAKİ VİSKOZ (SÜRTÜNMELİ) AKIM
 AKIM") 5. ORURKİ İSKOZ (SÜRTÜNMEİ) KIM 5.0. oru Sistemleri Çözüm Yötemleri oru sistemleriyle ilgili problemleri çözümüde tip çözüm yötemi vardır. ular I. Tip, II. Tip ve III. Tip çözüm yötemleridir. u çözüm yötemleride
5. ORURKİ İSKOZ (SÜRTÜNMEİ) KIM 5.0. oru Sistemleri Çözüm Yötemleri oru sistemleriyle ilgili problemleri çözümüde tip çözüm yötemi vardır. ular I. Tip, II. Tip ve III. Tip çözüm yötemleridir. u çözüm yötemleride
MEKANİK TESİSATTA EKONOMİK ANALİZ
 MEKANİK TESİSATTA EKONOMİK ANALİZ Mustafa ÖZDEMİR İ. Cem PARMAKSIZOĞLU ÖZET Düya çapıda rekabeti ö plaa çıktığı bu gükü şartlarda, e gelişmiş ürüü, e kısa sürede, e ucuza üretmek veya ilk yatırım ve işletme
MEKANİK TESİSATTA EKONOMİK ANALİZ Mustafa ÖZDEMİR İ. Cem PARMAKSIZOĞLU ÖZET Düya çapıda rekabeti ö plaa çıktığı bu gükü şartlarda, e gelişmiş ürüü, e kısa sürede, e ucuza üretmek veya ilk yatırım ve işletme
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
BAĞINTI VE FONKSİYON
 BAĞINTI VE FONKSİYON SIRALI N-Lİ x, x, x,..., x tae elema olsu. ( x, x, x,..., x ) yazılışıda elemaları sırası öemli ise x, x, x,..., x ) e sıralı -li deir. x, x, x,..., x ) de ( x (, x, x ( x, ) sıralı
BAĞINTI VE FONKSİYON SIRALI N-Lİ x, x, x,..., x tae elema olsu. ( x, x, x,..., x ) yazılışıda elemaları sırası öemli ise x, x, x,..., x ) e sıralı -li deir. x, x, x,..., x ) de ( x (, x, x ( x, ) sıralı
STATİK MUKAVEMET İÇİN TASARIM (Design for Static Strength) Maksimum Normal Gerilme Teorisi (Maximum Normal Stress Theory)
 Maksimum Normal Gerilme Teorisi (Maximum Normal Stress Theory)") Gücelleme:04/11/018 TATİK MUKAVEMET İÇİN TAARIM (Desig for tatic tregth) MUKAVEMET TEORİLERİ (Failure Theories) Maksimum Normal Gerilme Teorisi (Maximum Normal tress Theor) Üç asal gerilmede birisii, malzemei
Gücelleme:04/11/018 TATİK MUKAVEMET İÇİN TAARIM (Desig for tatic tregth) MUKAVEMET TEORİLERİ (Failure Theories) Maksimum Normal Gerilme Teorisi (Maximum Normal tress Theor) Üç asal gerilmede birisii, malzemei
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ
 1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
denklemini x=0 adi nokta civarında çözünüz.
 dklmii = adi okta ivarıda çözüüz. Rküra bağıtıı DİFERANSİYEL DENKLEMLER UFUK ÖZERMAN y +y +( /6y= ( dklmi içi = oktaıı düzgü tkil okta olduğuu götri, İdi dklmii köklrii bulu v çözü. P( = = = = tkil okta
dklmii = adi okta ivarıda çözüüz. Rküra bağıtıı DİFERANSİYEL DENKLEMLER UFUK ÖZERMAN y +y +( /6y= ( dklmi içi = oktaıı düzgü tkil okta olduğuu götri, İdi dklmii köklrii bulu v çözü. P( = = = = tkil okta
EME 3117 SİSTEM SIMÜLASYONU. Girdi Analizi Prosedürü. Dağılıma Uyum Testleri. Dağılıma Uyumun Kontrol Edilmesi. Girdi Analizi-II Ders 9
 ..7 EME 37 Girdi Aalizi Prosedürü SİSTEM SIMÜLASYONU Modelleecek sistemi (prosesi) dokümate et Veri toplamak içi bir pla geliştir Veri topla Verileri grafiksel ve istatistiksel aalizii yap Girdi Aalizi-II
..7 EME 37 Girdi Aalizi Prosedürü SİSTEM SIMÜLASYONU Modelleecek sistemi (prosesi) dokümate et Veri toplamak içi bir pla geliştir Veri topla Verileri grafiksel ve istatistiksel aalizii yap Girdi Aalizi-II
18.06 Professor Strang FİNAL 16 Mayıs 2005
 8.6 Professor Strag FİNAL 6 Mayıs 25 ( Pua) P,..., P R deki oktalar olsu. ( ai, ai2,..., a i) P i i koordiatlarıdır. Bütü P i oktasıı içere bir cx +... + cx = hiperdüzlemi bulmak istiyoruz. a) Bu hiperdüzlemi
8.6 Professor Strag FİNAL 6 Mayıs 25 ( Pua) P,..., P R deki oktalar olsu. ( ai, ai2,..., a i) P i i koordiatlarıdır. Bütü P i oktasıı içere bir cx +... + cx = hiperdüzlemi bulmak istiyoruz. a) Bu hiperdüzlemi
 TÜME VARIM Bu bölümde öce,kısaca tümevarım yötemii, sorada ÖYS de karşılamakta olduğumuz sembolüü ve sembolüü ele alacağız. A. TÜME VARIM YÖNTEMİ Tümevarım yötemii ifade etmede öce, öerme ve doğruluk kümesi
TÜME VARIM Bu bölümde öce,kısaca tümevarım yötemii, sorada ÖYS de karşılamakta olduğumuz sembolüü ve sembolüü ele alacağız. A. TÜME VARIM YÖNTEMİ Tümevarım yötemii ifade etmede öce, öerme ve doğruluk kümesi
Ki- kare Bağımsızlık Testi
 PARAMETRİK OLMAYAN İSTATİSTİKSEL TEKNİKLER Prof. Dr. Ali ŞEN Ki- kare Bağımsızlık Testi Daha öceki bölümlerde ölçümler arasıdaki ilişkileri asıl iceleeceğii gördük. Acak sıklıkla ilgileile veriler ölçüm
PARAMETRİK OLMAYAN İSTATİSTİKSEL TEKNİKLER Prof. Dr. Ali ŞEN Ki- kare Bağımsızlık Testi Daha öceki bölümlerde ölçümler arasıdaki ilişkileri asıl iceleeceğii gördük. Acak sıklıkla ilgileile veriler ölçüm
GAZİ ÜNİVERSİTESİ MÜHENDİSLİK - MİMARLIK FAKÜLTESİ KİMYA MÜHENDİSLİĞİ BÖLÜMÜ. KM 482 Kimya Mühendisliği Laboratuarı III
 GAZİ ÜNİVERSİTESİ MÜHENİSLİK - MİMARLIK FAKÜLTESİ KİMYA MÜHENİSLİĞİ BÖLÜMÜ KM 482 Kimya Mühedisliği Laboratuarı III eey No : 2-a eeyi adı : Kesikli istilasyo eeyi amacı : a) Kolodaki basıç kaybıı belirlemek,
GAZİ ÜNİVERSİTESİ MÜHENİSLİK - MİMARLIK FAKÜLTESİ KİMYA MÜHENİSLİĞİ BÖLÜMÜ KM 482 Kimya Mühedisliği Laboratuarı III eey No : 2-a eeyi adı : Kesikli istilasyo eeyi amacı : a) Kolodaki basıç kaybıı belirlemek,
10. SINIF KONU ANLATIMLI. 5. ÜNİTE: DALGALAR ETKİNLİK ve TEST ÇÖZÜMLERİ
 10. SINI ONU ANATII 5. ÜNİTE: DAGAAR ETİNİ e TEST ÇÖZÜERİ 31 5. Üite 1. ou Etkilik C i Çözümleri c. 1. Soruda e dalgalarıı hızı eşit erilmiş. Ayrıca şekil icelediğide m = 4 birim, m = 2 birimdir. Burada;
10. SINI ONU ANATII 5. ÜNİTE: DAGAAR ETİNİ e TEST ÇÖZÜERİ 31 5. Üite 1. ou Etkilik C i Çözümleri c. 1. Soruda e dalgalarıı hızı eşit erilmiş. Ayrıca şekil icelediğide m = 4 birim, m = 2 birimdir. Burada;
HARRAN ÜNİVERSİTESİ 2016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ
 HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
BÖLÜM XIII. FOURİER SERİLERİ VE FOURİER TRANSFORMU Periyodik fonksiyon
 Devre erisi Ders Ntu BÖLÜM XIII FOURİER SERİLERİ VE FOURİER RANSFORMU Periydik fksiy f( t) f( t ),,,... ve periyt. f ( t )- f( t - ) f( t + ) - f( t + )... Pratikte birçk elektriksel kayak periydik dalga
Devre erisi Ders Ntu BÖLÜM XIII FOURİER SERİLERİ VE FOURİER RANSFORMU Periydik fksiy f( t) f( t ),,,... ve periyt. f ( t )- f( t - ) f( t + ) - f( t + )... Pratikte birçk elektriksel kayak periydik dalga
MAKİNA TEORİSİ ÖDEV 3. A) Problemlerin Yanıtları
 Problemlerin Yanıtları") MAK3 Makina Teorisi MAKİNA TEORİSİ ÖDEV 3 A) Problemlerin Yanıtları ) Birinci soruda verilen sistem statik denge konumunda kabul edilsin. Buna göre sistem geometrisinden aşağıdaki Şekil elde edilebilir.
MAK3 Makina Teorisi MAKİNA TEORİSİ ÖDEV 3 A) Problemlerin Yanıtları ) Birinci soruda verilen sistem statik denge konumunda kabul edilsin. Buna göre sistem geometrisinden aşağıdaki Şekil elde edilebilir.
Sağ Taraf Fonksiyonu İle İlgili Özel Çözüm Örnekleri(rezonans durumlar)
") 3.1.2.1. Sağ Taraf Fonksiyonu İle İlgili Özel Çözüm Örnekleri(rezonans durumlar) ÖRNEK: y + 4.y + 4.y = 5.sin2x diferensiyel denkleminin genel çözümünü bulalım: Homojen kısmın çözümü: y + 4.y + 4.y = 0
3.1.2.1. Sağ Taraf Fonksiyonu İle İlgili Özel Çözüm Örnekleri(rezonans durumlar) ÖRNEK: y + 4.y + 4.y = 5.sin2x diferensiyel denkleminin genel çözümünü bulalım: Homojen kısmın çözümü: y + 4.y + 4.y = 0
OLĐMPĐYATLARA HAZIRLIK ĐÇĐN DOĞRUSAL ĐNDĐRGEMELĐ DĐZĐ PROBLEMLERĐ ve ÇÖZÜMLERĐ (L. Gökçe)
") OLĐMPĐYATLARA HAZIRLIK ĐÇĐN DOĞRUSAL ĐNDĐRGEMELĐ DĐZĐ PROBLEMLERĐ ve ÇÖZÜMLERĐ (L. Gökçe) Matematikte sayı dizileri teorisii ilgiç bir alt kolu ola idirgemeli diziler kousu olimpiyat problemleride de karşımıza
OLĐMPĐYATLARA HAZIRLIK ĐÇĐN DOĞRUSAL ĐNDĐRGEMELĐ DĐZĐ PROBLEMLERĐ ve ÇÖZÜMLERĐ (L. Gökçe) Matematikte sayı dizileri teorisii ilgiç bir alt kolu ola idirgemeli diziler kousu olimpiyat problemleride de karşımıza
KÖKLÜ SAYILAR. 1 n n. x a a x say s na a n n n. kuvvetten kökü denir. Köklü say lar n. çözüm. n n. a özelli inden, çözüm. m n n. çözüm. çözüm.
 KÖKLÜ SAYILAR Köklü Sayılar ve doal say olmak üzere, x =a deklemii salaya hepsi ay zamada birer üslü saydr. = ise a a (karekök a) = ise a (küpkök a) = ise a (. kuvvette kök a) : : = ise a (. kuvvette kök
KÖKLÜ SAYILAR Köklü Sayılar ve doal say olmak üzere, x =a deklemii salaya hepsi ay zamada birer üslü saydr. = ise a a (karekök a) = ise a (küpkök a) = ise a (. kuvvette kök a) : : = ise a (. kuvvette kök
+ y ifadesinin en küçük değeri kaçtır?
 PROBLEMLER: 9 Sıavı 5 a, a, a,..., a Z, 0 a k olmak üzere, 95 sayısı faktöriyel tabaıda 5. k 95 = a+ a.! + a.! +... + a.! biçimide yazılıyor. a kaçtır? (! =...( ) ) 0 ( B ) ( C ) ( D ) ( E ). Bir ABC üçgeide
PROBLEMLER: 9 Sıavı 5 a, a, a,..., a Z, 0 a k olmak üzere, 95 sayısı faktöriyel tabaıda 5. k 95 = a+ a.! + a.! +... + a.! biçimide yazılıyor. a kaçtır? (! =...( ) ) 0 ( B ) ( C ) ( D ) ( E ). Bir ABC üçgeide