0.3 Sabit Nokta Etrafında Dönme (Düzlemsel)
|
|
|
- Nilüfer Büker
- 6 yıl önce
- İzleme sayısı:
Transkript

1 Şekil 1: 0.1 Öteleme Öteleme hareketi yapan bir cismin her doğrusu her zaman kendine paralel kalır. Öteleme hareketi doğrusal ve eğrisel öteleme olmak üzere ikiye ayrılır. Her iki durumda da w ve α sıfıra eşittir. Bundan dolayı hareketin denklemlerini F = ma G ve M G = I G α şeklinde yazabiliriz. 0.2 Sabit bir eksen etrafında dönme Genel düzlemsel hareketin denklemleri burada da geçerlidir. Bunları yeniden yazarsak : F = mag, M G = I G α = 0 Yukarıdaki ilk eşitliğin iki skaler bileşimi : F n = mr G w 2, F t = mr G αidi. Bu iki skaler denkleme bir üçüncüsü de M G = I G α eklenerek eğrisel koordinatlarda istenenler çözülür. Kartezyen koordinatlarda ise : Fx = ma x ; F y = ma y ve M = IG α denklemleri kullanılır. Diğer koordinatlar için benzer işlemler yürütülür. 0.3 Sabit Nokta Etrafında Dönme (Düzlemsel) F = mag F t = mr G α = ma t Fn = mr G w 2 = ma n ve M = IG α 1
 t r G yazılır.")

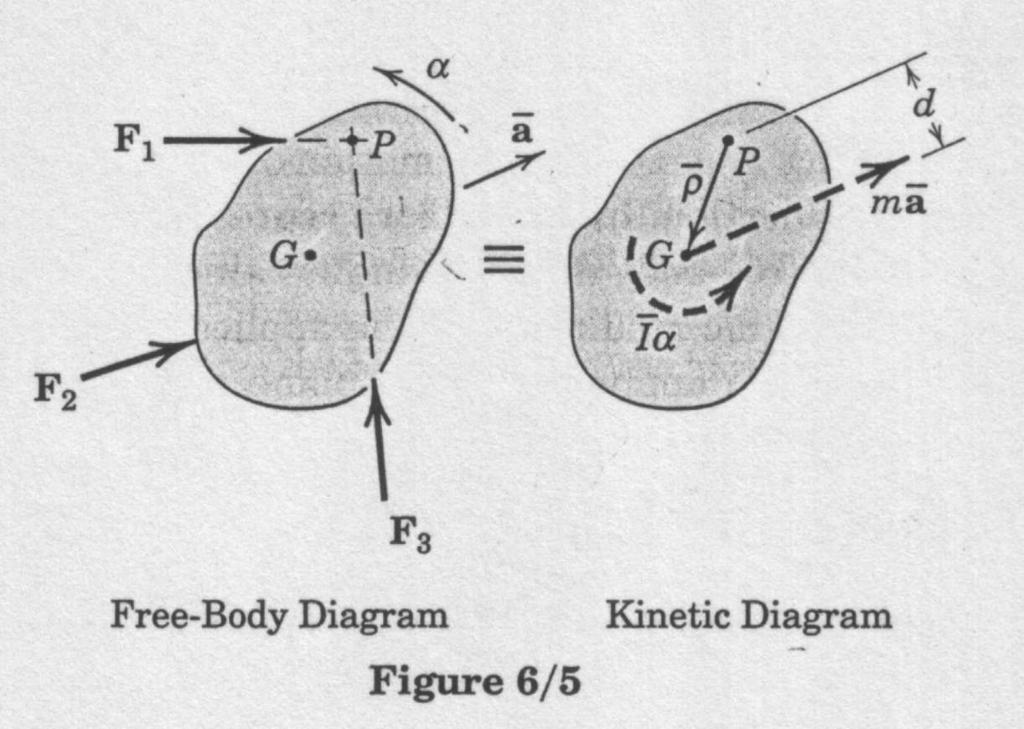
2 Şekil 2: Şekil 3: G (kütle merkezi) noktasına göre moment alırken rijit cisme etki eden reaksiyon kuvvetinide gözönüne almalıyız. Şimdi rijit cismin O noktasına göre moment denklemini gözönüne alalım: MO = I O α idi. Şekilden O noktasına göre toplam moment M O = I G α + m(a G ) t r G yazılır. Atalet momenti için paralel eksen teoremini uygularsak, (a G ) t = r G α yazılarak, I O = I G + m(r G ) 2 elde edilir. Böylece; M O = (I O mrg)α 2 + mrgα 2 = I O α aynı sonucu elde ederiz. Sonuç: { F = mag MO = I O α } Hareket Denklemleeri Özel durum: Rijit cismin kütle merkezi etrafında dönmesi durumunda a G = 0 böylece F = 0 uygulanan kuvvetlerin momenti I G α ya eşittir. Genel Durum: Īα ve m(a G) t yerine m(a G ) t yi paralel bir konuma kaydırıp ilk duruma denk bir durum elde edebiliriz. 2
 buradan q = k 2 O/r G elde edilir. Q noktası vurma-çarpma merkezi olarak adlandırılır.")

3 Şekil 4: Şekil 5: O ya göre moment için M O = q(mr G α) ve ayrıca M O = I G α + m(a G ) t r G = (I G mr 2 G)α yazılarak birbirine eşitlenirse: q(mr G α) = (I G mr 2 G)α = I O α mr G q = I O bulunur. I O = k 2 Om bağıntısını kullanalım. (k O, O noktasına göre jirasyon çapı) buradan q = k 2 O/r G elde edilir. Q noktası vurma-çarpma merkezi olarak adlandırılır. Bu noktaya göre tüm kuvvetlerin momenti 0 dır(m Q = 0). Çünkü cisme etkiyen toplam kuvvet Q çarpma merkezinden(percussion center) geçiyor demektir. Bu da katı cisme etkiyen kuvvet sisteminin Q noktasında bir tek kuvvete indirgenmesi demektir. Örnek Problem 6/1: şekildeki araç sukunetten başlıyarak 60 m de 50 km/h hızına ulaşmaktadır. Aracın kütlesi 1500 kg dir. Her tekerlek çiftine etki eden normal kuvveti ve arka tekerleğe etkiyen sürtünme kuvvetini hesaplayınız. Etkili sürtünme katsayısı µ = 0.8 veriliyor.(en az) Çözüm 6/1: Tekerleklerin kütlesini ihmal edelim. araç doğrusal öteleme yapan bir tek rijit cisim olarak görülebilir. v 2 = 2as ā = v2 2s 3
 = 2410N F = mā hareket denklemininin üç izdüşümü yazılırsa; Fx = mā x F 1460 = 2410 F = 3880N F = māy N 1 + N 2 14.64(10 3 ) = 0 (a) MG = Īα = 0 (α = 0) 1.5N 1 1.5N 2 + 3880(0.")
4 Şekil 6: a G = ā = (50/3.6)2 2(60) tan θ = 1 10 = 1.608m/s 2 θ = arctan 0.1 θ = 5.71o W = W sin θi W cos θj, W x = w sin θ W y = W cos θ W x = 1500(9.81)sin5.71 = 1464 W y = 1500(9.81)coz5.71 = 14.64(10 3 )N ma = 1500(1.608) = 2410N F = mā hareket denklemininin üç izdüşümü yazılırsa; Fx = mā x F 1460 = 2410 F = 3880N F = māy N 1 + N (10 3 ) = 0 (a) MG = Īα = 0 (α = 0) 1.5N 1 1.5N (0.6) = 0 (b) (a) ve (b) den N } 1 = 6650N Cevap N 2 = 8100N NOT:3380N luk sürtünme kuvvetini dengeleyen (Taşıyan) sürtünme katsayısı F = µn den; µ = F N 2 = 3880 = 0.48 gerekli. Bize verilen en az µ = olduğuna göre yüzey yeteri kadar pürüzlü olup elde ettiğimiz F=3880N sonucu geçerlidir. İkinci Çözüm: MA = mād 3N 2 15(14.64(10 3 ) 0.6(1464) = 2410 N 2 = 8100N ve MB = mād 14.64(10 3 )(1.5) 1464(0.6) 3N 1 = 2410(0.6) 4
.")
 = 0 A t = M 1.5 = 5 1.")
5 Şekil 7: Şekil 8: N 1 = 6650N Bu ifadeler ( M p = Īα + mād) den yazıldı. Örnek Problem 6/2:Düşey AB çubuğunun kütlesi 150 kg ve kütle merkezi G dir. Çubuk θ = 0 konumundan paralel bağlantı ile sabit M=5 kn.m lik moment uygulanarak kaldırılmıştır (C ye uygulanıyor). Paralel bağlantıların açısal ivmesi α yı θ nın fonksiyonu olarak elde ediniz. DB kolunun B noktasındaki kuvveti θ = 30 o için elde ediniz. Çözüm 6/2: Çubuğun hareketi eğrisel ötelemedir. G kütle merkezinin dairesel hareketini n-t eğrisel koordinatlarda alalım. Bağlantıların kütleleri ihmal edilerek AC nin serbest cisim diagramından: MC = M A t (1.5) = 0 A t = M 1.5 = = 3.33kN B deki kuvvet bağlantı boyuncadır AB çubuğu: Ft = mā t (9.81) cos θ = 0.15(15α α = cos θrad/s 2 5
 = 0.15(1.5)(8.97) = 2.02kN mā t = m( rα) = 0.15(1.5)(9.15) = 2.06kN B kuvveti, A ya göre (A n ve A t ve ağırlık elimine olurlar) momentten elde edilebilir.")
6 Şekil 9: Bağlantıların açısal hızı: wdw = αdθ w 0 wdw = θ w 2 2 = 14.81θ 6.54(sin θ)θ 0 0 ( cos θ)dθ w 2 = 29.6θ sin θ bulunur. θ = 30 o için w 2 30 o = 8.97rad2 /s 2 ve α 30 o = 9.15rad/s 2 elde edilir. mā n = m( rw 2 ) = 0.15(1.5)(8.97) = 2.02kN mā t = m( rα) = 0.15(1.5)(9.15) = 2.06kN B kuvveti, A ya göre (A n ve A t ve ağırlık elimine olurlar) momentten elde edilebilir.(ayrıca A n ile m rα nın doğrultularının kesim noktasıda kullanılabilir.) A ya göre moment: MA = mād 1.8 cos 30 o.β = 2.02(1.2) cos 30 o (0.6) B = 2.14kN Cevap Not:A n bileşeni n doğrultusunda kuvvetlerin toplamından veya G ye göre momentteen yada B ile m rα nın doğrultularının kesiştiği noktaya göre momentten elde edilir. Problem 6/3 : 300 kg lık bir blok şekilde gösterilen mekanizma ile yukarı çekilmektedir. Kablolar tambura güvenli bir şekilde sarılmış ve tamburlar tek bir ünite olacak şekilde birleştirilmiştir. Bu ünitenin toplam kütlesi 150 kg ve O ya göre jirasyon yarıçapı 450 mm dir. Eğer A daki güç kaynağı kabloda 1.8 kn luk bir gerilme oluşturuyorsa bloğun düşey ivmesini ve O yatağındaki bileşke kuvvetini bulunuz. Çözüm 6/3: Tamburların O etrafında dönmesinden: M = Īθ, Ī = k2 m, Ī = I O Ī = I O = (0.450) 2 (150) = 30.4kgm 2 6
 = 30.4α (a) F y = ma y T 300(9.")
 da yazılırsa (b) ile çözümden T = 3250N, α = 3.")

7 Şekil 10: Şekil 11: Bloğun ivmelenmesi: MG = Īα 1800[0.600) T (0.300) = 30.4α (a) F y = ma y T 300(9.81) = 300a (b) a = a t = rα a = 0.3α ifadesi (a) da yazılırsa (b) ile çözümden T = 3250N, α = 3.44rad/s 2, a = 1.031m/s 2 bulunur. O daki reaksiyon: Fx = 0 O x 1800 cos 45 o = 0 O x = 1273N Fy = 0 O y = 150(9.81) sin 45 o = 0 O y = 6000N O = O 2 x + O 2 y = 6130N Şekil 12: 7
 1800 sin 45 o = 0 O y = 6000N Fx = mā x O x 1800 cos 45 o = 0 O x = 1273N Problem 6/4: 7.5 kg lik bir sarkacın kütle merkezi şekilde gösterilen G noktasındadır.")
(0.25) cos θ I O = k 2 m = (0.295) 2 (7.5) I O ifadesi M O ifadesinde da yerine yazılırsa; 7.5(9.81)(0.25) cos θ = (0.295) 2 (7.5)α α = 18.39 cos θ = 28.")
8 Şekil 13: Şekil 14: İkinci Çözüm: Mp = Īα + mād M O = Īα + mād 1800( (9.81)(0.300) = 30.4α + 300a(0.300) a = 300α yazılırsa a = 1.031m/s 2 bulunur. Fy = mā y O y = 150(9.81) 300(9.81) 1800 sin 45 o = 0 O y = 6000N Fx = mā x O x 1800 cos 45 o = 0 O x = 1273N Problem 6/4: 7.5 kg lik bir sarkacın kütle merkezi şekilde gösterilen G noktasındadır. Sarkacın O noktasına göre jirasyon çapı 295 mm dir. Eğer sarkaç θ = 0 o halinde hareketsiz olarak serbest bırakılırsa θ = 60 o olduğu anda O yatağındaki toplam kuvveti bulunuz. Çözüm 6/4: MO = I O α M O = 7.5(9.81)(0.25) cos θ I O = k 2 m = (0.295) 2 (7.5) I O ifadesi M O ifadesinde da yerine yazılırsa; 7.5(9.81)(0.25) cos θ = (0.295) 2 (7.5)α α = cos θ = 28.2 cos θrad/s θ = 60 o için: wdw = αdθ w o wdw = 8 π cos θdθ
(9.81) cos 60 = (7.5)(0.25)(28.2) cos 60 O t = 10.37. O = O 2 x + O 2 y = 155.6N Cevap O t nin başlangıçtakii yönü için M G = Īα denkleminden yararlanılır.")
9 Şekil 15: w 2 = 48.8(rad/s 2 ) 2 w = 6.985rad/s Hareket denkleminin diğer iki bileşeni θ60 o için yazılırsa: Fn = m rw 2 O n 7.4(9.81)sin60 = (7.5)(0.25)(48.8) O n = 155.2N, ve Ft = m rα O t + (7.5)(9.81) cos 60 = (7.5)(0.25)(28.2) cos 60 O t = O = O 2 x + O 2 y = 155.6N Cevap O t nin başlangıçtakii yönü için M G = Īα denkleminden yararlanılır. G ye göre O t nin momenti ile α uyuşacak şekilde saat yönünde olmalıdır. O t kuvveti Q perküsyon merkezine göre momentten elde edilebilirdi. Önce c=perküsyon yarıçapını elde etmek gerekir. c = k2 o r 2 c = (0.295) = 0.348m { Ot (0.348) 7.5(9.81(cos 60( ) = 0 MQ = 0 O t = 10.37N Cevap 0.4 Genel Düzlemsel Hareket Formüllerimiz; F = ma G, M G = I G α burada da geçerlidir. Herhangi bir P noktasına göre moment; M p = I G α+ma G d idi. İlgili şekilleer 6. bölümün başında verildi. Problem 6/5: 150 mm yarıçapında bir çamber 20 o lik bir eğik düzlemde hareketsşz halde serbest bırakılmaktadır. Eğer statik ve kinetik sürtünme katsayıları µ s = 0.15 ve µ k = 0.12 ise çember düzlem boyunca aşağıya doğru 3m hareket ettiğinde geçen t zamanını, α açısal ivmesini bulunuz. 9

10 Şekil 16: Şekil 17: 10
 ā = 1.678m/s2 1 ā yi, ā = rα kabulü ile C ye göre momentten doğrudan elde ederiz.")

11 Şekil 18: Şekil 19: Çözüm 6/5: kayma yok varsayarak: Fx = mā x Fy = mā y MG = Īα mg sin 20 F = mā N mg cos 20 = 0 F r = mr 2 α ilk iki denklemden F elimine edilir ve α = a/r yerine yazılırsa: ā = g sin 20 ā = (0.342) ā = 1.678m/s2 1 ā yi, ā = rα kabulü ile C ye göre momentten doğrudan elde ederiz. M P = Īα + mād denklemini C noktası için yazarsak: MC = Īα + mār mgr sin 20 = (mr2 )(ā r ) + mār ā = g sin 20 2 Kaymama kabülümüzün doğruluğunun kontrolü için F ile N yi hesaplayıp F i limit değeri ile kıyaslamamız gerekir. F x ve F y denklemlerinden: Fx : F = mg sin 20 m g sin20 F = mg N 2 Fy : N = mg cos 20 = 0.940mg N maksimum olası sürtünme kuvveti: F mak = µ s N F mak = 0.15(0.940mg) = mg 11
 = 0.1128mg Hareket Denklemleri: Fx = mā x mg sin 20 0.1128mg = mā ā = 2.25m/s 2 MG = Īα 0.1128mg(r) = mr2 α α = 10.1128(9.81) = 7.37rad/s 2 0.")

12 Şekil 20: Şekil 21: Sonuç: F = mg > mg elde edildi. Kabulümüz yanlıştır. Çemner hem yuvarlanır hemde kayar. ā = rα olur. Sürtünme kuvveti kinetik değer alır. F = µ k N F = 0.12(0.940mg) = mg Hareket Denklemleri: Fx = mā x mg sin mg = mā ā = 2.25m/s 2 MG = Īα mg(r) = mr2 α α = (9.81) = 7.37rad/s Sabit ivme ile sukünetten hareket eden G nin 3 m yol alması için geçen zaman: x = 1 2x 2(3) 2 at2 t = ā = 2.25 = 1.633s Örnek problem 6/6:A kasnağı sabit α 0 = 3rad/s 2 açısal ivmesi ile dönmekte olup 70 kg kütleli B makarasını yatay düzlemde iç kasnağa sarılan kablo yardımıyla döndürmektedir. Jirasyon yarıçapı, G ye göre 250mm ve kasnak ile düzlem arsındaki statik sürtünme katsayısı o.25 dir. Kablodaki T gerilmesini ve F sürtünme kuvvetini hesaplayınız. Çözüm 6/6: Kablo üzerindeki bir noktanın ivmesi a t = rα = 0.25(3) a t = 0.75m/s 2 olup aynı zamanda D noktasının ivmesinin yatay bileşenidir. 12
13 B nin kaymadan yuvarlanacağını başlangıç olarak varsayarsak: (a d ) x = rα = DCα α = (a D) x DC = = 2.5rad/s2 Böylece G nin (kütle merkezinin) ivmesi; elde edilir. ā = a G = rα = Hareket Denklemleri: CGα = 0.40(2.5) = 1.25m/s 2 Fx = mā x F T = 70( 1.125) Fy = mā y N 70(9.81) = 0 N = 687N MG = Īα F (0.450) T (0.150) = 70(0.250)2 (2.5) (a) (b) (a) ve (b) den F = 75.8N ve T = 154.6N bulunur. Peki kabulümüz doğru mu? : F mak = µ s N = 0.25(687) F mak = 171.7N bulunur. Yani yüzey 171.7N luk sürtünme kuvveti yaratabilir. Problemde sadece 75.8N luk bir sürtünme kuvvetine gerek olduğuna göre kaymadan yuvarlanma kabulü geçerlidir. Not: Eğer µ s = 0.1 verilseydi F mak = µ s N F mak = 0.1(687) = 68.7N olurdu ki bu problemdeki gerekli sürtünme kuvveti olan 75.8 den küçüktü. B kayar. Bu durumda ā = rα sağlanmaz. (a D ) x in bilinmesi halinde α = [ā (a D ) x ]/GD şeklinde elde edilir.. α nın bu değerşnş ve F mak = µ s N = 68.7N yi kullanarak hareket denklemleri yeniden çözülmelidir. Not: C nin dönme merkezi olması halinde (Alternatif); MC = Īα+mār 0.3T = 70(0.25)2 (0.25)+70(1.125)(0.45) T = 154.6N cevap bulunur. Problem 6/7 : 30 kg kütleli ince AB çubuğunun uçları düşey ve yatay yatakta sürtünmesiz olarak hareket etmektedir. A ucuna 150N luk yatay kuvvet tatbik ediliyor. İlk anda θ = 30o olup çubukhareketsizdir. Çubuğun açısal ivmesini ve A ile B uçlarına (mafsallarına) etkiyen kuvvetleri bulunuz. Çözüm 6/7: 13


+B(60 cos 30) = [ 1 12 30(1.2)2 ]α (1) Fx = mā x 150 B = 30(0.")
14 Şekil 22: Şekil 23: a A = a B + a A/B ve ā = a G = a B + a G/B çözülerek ā ve α elde edilir. Yukarıdaki denklemleri ivme üçgenleri ile temsil ederiz. ā x = ā cos 30 = (0.6α) cos 30 = 0.520α m/s 2 ā y = ā sin 30 = (0.6α) sin 30 = 0.3α m/s 2 yazılır, M G = Īα ve F = mā uygulanırsa serbes cisim diagramından Ī = 1 12 ml2 çıbığun kütle merkezine göre atalet momenti olmak üzere; MG = Īα 150(0.6 cos 30) A(0.6 sin 30)+B(60 cos 30) = [ (1.2)2 ]α (1) Fx = mā x 150 B = 30(0.520α) (2) Fy = mā y A 30(9.81) = 30(0.3α) (3) Şekil 24: 14
(0.6 sin 30) = 1 12 30(1.2)2 α 30(0.520α)(0.6 cos 30) 30(0.3α)(0.6 sin 30) 67.6 = 14.40α α = 4.69rad/s 2 α = 4.69 bilindikten sonra (2) ve (3) den; Fy = mā y A 30(9.81) = 30(0.3)(4.")

15 Şekil 25: Şekil 26: Bu üç denklemin çözümünden: A=337N, B=76.8N, α = 4.69rad/s 2 bulunur. İkinci çözüm: C yi moment merkezi olarak alıp M P = Īα+mād fomülünden; MC = Īα + mād 150(1.2 cos 30) + 30(9.81)(0.6 sin 30) = (1.2)2 α 30(0.520α)(0.6 cos 30) 30(0.3α)(0.6 sin 30) 67.6 = 14.40α α = 4.69rad/s 2 α = 4.69 bilindikten sonra (2) ve (3) den; Fy = mā y A 30(9.81) = 30(0.3)(4.69) A = 337N Fx = mā x 150 B = 30(0.520)(4.69) B = 76.8N NOT: Kinetik diagramdan; Īα ile mād = mā x d y mā y d x aynı yöndedir.örnek problem 6/8:Şekildeki arabaya fren yapılarak geriye doğru sabit a ivmesi verildiğünde kapısı hafifçe açılıyor. Herhangi bir θ için kapının w açısal hızını elde ediniz. θ = 90 için w yi elde ediniz. Kapının kütlesi m, ve kütle merkezi O menteşesinden itibaren r ve atalet yarıçaı k O dır. Çözüm 6/8: w = w(θ) değişiyor. α = α(θ) ya gerek var. mā nın bileşenleri: ma O = ma (arabanın ivmesi) ā = a G = a O + (a G/O ) n + (a) t 15
16 m(a G/O ) n = m rw 2 m(a G/O ) t = m rα, w = θ, α = θ O ya göre moment ile O x ve O y elimine edilir, MO = Īα + mād 0 = m(k 2 O r 2 )α m rα( r) + ma( r sin θ) çözülürse elde edilir bulunur. wdw = αdθ θ = π 2 α = a r sin θ ko 2 w 0 wdw = θ w 2 = 2a r (1 cos θ) ko 2 için w = 1 k O 2a r O x ve O y yi verilen θ cinsinden elde etmek için: 0 a r sin θdθ k 2 O Cevap Fx = mā x O x = ma m rw 2 cos θ m rα sin θ 0.5 İş-Enerji = m[a 2a r2 (1 cos θ) cos θ aā2 sin θ 2 ] ko 2 ko 2 = ma[1 r2 (1 + 2 cos θ 3 cos θ 2 )] k 2 O Fy = mā y O y = m rα cos θ m rw 2 sin θ = m r a r k 2 O sin θ cos θ m r 2a r (1 cos θ) sin θ ko 2 = ma r2 (3 cos θ 2) sin θ ko Kuvvet ve Momentlerin yaptığı iş: Bir kuvvet tarafından yapılan iş U = F.dr = F cosαds formülü ile Bölüm 3/6 da verilmişti. Bu formülde dr, F kuvveti etkisi altında dt zaman aralığındaki diferansiyel yerdeğiştirme vektörü idi. Uygulamalarda, büyük bir sıklıkla, M momenti tarafından yapılan işi de bulmamız gerekebilir. 16

m i v 2, T = (1/2)m i v 2 sonuç olarak m i = m tanımlaması kullanılarak T = (1/2)mv 2 yazılabilir.")
17 Şekil 27: Şekil 28: Öteleme Kuvvet çiftinin yaptığı işi bulalım; Kuvvetlerin yerdeğiştirmeden dolayı yaptığı iş birbirini yok eder ve net işi du = F (bdθ) = Mdθ olarak elde ederiz. Bundan dolayı sonlu bir dönme esnasında M momenti tarafından kendisine paralel bir düzlemde yaptığı iş; U = Mdθ ile ifade edilir Kinetik Enerji Şimdi 3 tip düzlemsel hareket için kinetik enerji formülünü verelim. Öteleme Durumu: T = (1/2)m i v 2, T = (1/2)m i v 2 sonuç olarak m i = m tanımlaması kullanılarak T = (1/2)mv 2 yazılabilir. Sabit bir eksen etrafında dönme hali: T i = (1/2)m i (r i w) 2, T = (1/2)w 2 m i r 2 i burada I 0 = m i r 2 i ifadesini kullanarak kinetik enerji denklemini T = (1/2)I 0 w 2 olarak elde edebiliriz. Genel düzlemsel hareket hali: T = (1/2)mv 2 G + (1/2)I G w 2 formülü ile verilir. Not1:m i nin v i hızını v(= v G ) ye paralel ve m i nin G ye göre hareketindeki teğetsel hız olan ρw ya paralel iki bileşen halinde yazarız. T = (1/2)m i v 2 i = (1/2)m i [ v G + (ρ i w)] 2 17
 = 0 dır. öyleyse yazılabilir.")

18 Şekil 29: Sabit eksen etrafında dönme Şekil 30: T = (1/2)m i (v 2 G + ρ 2 i w 2 + 2v G ρ i wcosθ) Burada üçüncü terim: vwρ i m i cosθ = vw m i ρ i cosθ = vw( m i y i = mȳ = 0) = 0 dır. öyleyse yazılabilir. T = 1 2 mv2 G w2 I G Not2: Cisim bir Q noktası etrafında dönüyorsa v Q =0 olacağından T = 0 + (1/2)I Q w 2 T = (1/2)I Q w 2 olur Kinetik Enerji U teriminin elastik ve çekim kuvvetleri hariç diğer kuvvetler tarafından yapılan işi temsil ettiğini hatırlayalım. İş-Enerji eşitliği: U 1 2 = T + v g + v e idi. Bu eşitliği aynen burada da kullanıyoruz. 18

19 Şekil 31: Güç F kuvvetinin etkisi altında düzlemsel hareket yapan rijit bir cismi göz önüne alalım. F kuvvetinin oluşturduğu güç, o anda yapılan işin zamana göre değişme oranı (türev)dır. du = F.dr P = du dt = F.v Benzer şekilde rijit cisme etki eden M momentinin oluşturduğu güç: P = du/dt = Mdθ/dt = Mw ile verilir. Eğer F kuvveti ve M momenti aynı anda rijit cisme uygulanmışsa: P = F.v + Mw dır. Örnek Problem 6/9:Şekildeki tekerlek göbek kasnağının kaymadan yuvarlanmasıyla yukarıya doğru 100N luk çekme kuvveti ile hareket ediyor. Tekerlek sükujnetten harekete geçtiğine göre O merkezinin 3m yol alması halinde tekerleğin ω açısal hızını bulunuz. Kütle merkezi O ve kütle 40 kg dir. Merkezi atalet yarıçapı k o = 150mm veriliyor. 3m lik yol boyunca 100N kuvvetinin giriş gücünü hesaplayınız. Çözüm: Sadece W=(9.81)40 ağırlığı ve 100N kuvveti iş yapar. Kayma yok. Sürtünme kuvveti iş yapmaz. C ani dönme merkezi olur. Orantıdan v A = 3v bulunur. v = 100 v A 300 v A = 3v Halatın üzerindeki A noktasının aldığı yol O nun yolunun 3 katı olur (v A = 3v idi) U 1 2 = (100)(3)(3) (392 sin 15 o (3) U 1 2 = 595J 19
![Şekil 32: Tekerlek genel düzlemsel hareket yapılyor. Kinetik enerji değişimi: T = (1/2)m v 2 + (1/2)Iw 2 T = (1/2)m v 2 + (1/2)mk 2 ow 2 T = [ 1 2 (40)(0.10w)2 + 1 2 (40)(0.15)2 w 2 ] T = 0.](/docs-images/63/50419067/images/20-0.jpg "650w 2 NOT: Tekerleğin kinetik enerjisini T = (1/2)I C w 2 dan da elde edebiliriz. T = 1 2 (Ī + m OC 2 )w 2 = 1 2 (mk2 o + m OC 2 )w 2 T = 1 2 (40)[(0.15)2 + (0.10) 2 ]w 3 = 0.")
20 Şekil 32: Tekerlek genel düzlemsel hareket yapılyor. Kinetik enerji değişimi: T = (1/2)m v 2 + (1/2)Iw 2 T = (1/2)m v 2 + (1/2)mk 2 ow 2 T = [ 1 2 (40)(0.10w) (40)(0.15)2 w 2 ] T = 0.650w 2 NOT: Tekerleğin kinetik enerjisini T = (1/2)I C w 2 dan da elde edebiliriz. T = 1 2 (Ī + m OC 2 )w 2 = 1 2 (mk2 o + m OC 2 )w 2 T = 1 2 (40)[(0.15)2 + (0.10) 2 ]w 3 = 0.650w N nun giriş gücü w = 30.3rad/sn için P = F.v P 100 = 100(0.3)(30.3) P = 908 W att Problem 6/10: 1200 mm uzunluğunda 20 kg kütlesinde, kütle merkezi B de olan bir çubuk θ = 60 o konumundan hareketsiz olarak bırakılıyor. B ve A noktaları sürtünmesiz olarak düşey ve yatay olarak yataklanmıştır.çubuk düşerken şekilde görüldüğü gibi yayı sıkıştırıyor. a- θ = 30 o den geçerken çubuğun açısal hızını bulunuz. b- B mesnetinin yatay düzlemle çarpıştığı andaki hızını bulunuz. (Yayın esneme katsayısı k=5kn/m dir) Çözüm 6/20: A ve B hareketli mafsallarının kütlelerinin ihmali ve B de sürtünmenin olmaması sonucu sistem KORUNUMLUDUR(veya Potansiyelli). İlk Adım: θ = 0 o den θ = 30 o ye kadar yay etkimiyor. Yani iş-enerji denkleminde (V e ) yok. Ağırlığın işini V g potansiyeli ile temsil edersek; iş yapan 20

Īw2 T = 1 2 (20)(0.300w)2 + 1 2 [ 1 12 20(1.")
![2)2 ]w 2 Çubuğun kinetik enerjisi T = 2.10w 2 olarak bulunur.](/docs-images/63/50419067/images/21-2.jpg "V g = W h (Ağırlığın potansiyel enerjisi) V g = 20(9.81)(0.")
21 Şekil 33: Şekil 34: başka dış kuvvet yoktur(u 1 2 = 0) olur. C ani dönme merkezi belirlenerek v B = CBw yazılır.θ = 30 o konumunda çubuğun kinetik enerjisi: T = (1/2)m v 2 + (1/2)Īw2 T = 1 2 (20)(0.300w) [ (1.2)2 ]w 2 Çubuğun kinetik enerjisi T = 2.10w 2 olarak bulunur. V g = W h (Ağırlığın potansiyel enerjisi) V g = 20(9.81)(0.600cos30 o 0.600) Şekil 35: 21
22 V g = 15.77J U 1 2 = T + V g 0 = 2.10w w = 2.74rad/s İkinci adım: Yayıda hesaba katarak tüm sistem: V e = 1 2 kx2 = 0.5(5000)( ) 2 0 V e = 56.3J Çubuğun son yatay konumunda A nın hızı yoktur. Yani, çubuk bu konumda A nın etrafında dönme hareketi yapıyor durumundadır. Buna göre çubuğun kinetik enerjisi: T = 1 2 I Aw 2 T = 0.5( (1.2)2 )( v B 0.6 )2 T = 13.33v 2 B Ağırlığın potansiyel enerjisindeki değişim V g = W h V g = 20(9.81)( 0.600) V g = 117.7J Bulunanları U 1 2 = T + V g + V e formülünde yazarsak: 0 = (13.33v 2 B 0) v B = 2.15m/s NOT: Eğer çubuk tek başına bir sistem olarak alınırsa (son şekildeki gibi) ağırlık pozitif bir iş yapar. Çubuğa etkiyen ikinci dış kuvvet yay kuvveti kx olur. Bu ise negatif iş yapar. U 1 2 = T yazılır = 13.33v 2 B v B = 2.15m/s aynı sonuç elde edilir. Örnek Problem 6/11: Şekildeki sistemde her tekerleğin kütlesi 30kg ve merkezi atalet yarıçapı 100mm dir. Her OB bağlantısının kütlesi 10kg ve düzgün çubuk olarak görülüyor. B deki 7 kg kütleli bilezik düşey sabit şaft üzerinde sürtünmesiz kayabilmektedir. Yay sabiti k=30kn/m olup, bağlantılar yatay konumda iken bilezik ile yay temas etmektedir. Bilezik θ = 45 o konumundan hızsız olarak serbest bırakıldığına göre ve tekerleklerin kaymasını önleyecek değerde sürtüne varsa bileziğin v B hızını: 1-Yaya çarptığı anda 2- yaydaki maksimum deformasyon anında hesaplayınız. 22
 Ayrıca bağlantılar en alt konumda (θ = 0 da) O etrafında dönme hareketi yaparlar.")
23 Şekil 36: Çözüm: Kinetik sürtünme yok. Sistem düzlemde, sıfır potansiyel enerji seviyesi OO olarak alınabilir.iş yapan dış kuvvet yok. 1- θ = 45 o den θ = 0 o aralığında T telerlek = 0 dır.(sistem ilk anda hızsız ve son anda da yani θ = 0 da durur.) Ayrıca bağlantılar en alt konumda (θ = 0 da) O etrafında dönme hareketi yaparlar. Sistemin kinetik enerji değişimi: T = [2( 1 2 I Ow 2 ) 0] baglantı + [ 1 2 mv2 0] bilezik T = (0.375)2 ( v B ) (7)v2 B = 6.83v 2 B Sistemin potansiyel enerjisi: V = V g + V e Bilezik h = 0.375sin45 0 = 0.265m düşer. V = V g = 0 2(10)(9.81)( ) 7(9.81)(0.265) V = 44.2J Sistemin potansiyel enerjisi U 1 2 = 0. Böylece U 1 2 = T + V 0 = 6.83v 2 B 44.2 v B = Maksimum yay deformasyonu x konumunda sistemin tüm parçaları sukunette olur. Yani T = 0 olur. U 1 2 = T + V g + V e 0 = 0 2(10)(9.81)( x 2 +) 7(9.81)(0.265+x)+1 2 (30)(103 )x 2 x = 60.1mm 23
24 0.6 İş-Enerji ile İvme; Virtüel İş İş-Enerji bağıntısını sabit ivmeli hareketler için de kullanırız.u 1 2 = T + V g + V e denklemini elementer yerdeğiştirme için du = dt + dv yazarız. Birbirlerine bağlı hareket eden cisimler için i indisini kullanarak tüm sistemin kinetik enerjisi:t = 1 m 2 i v i Īiw i 2 ) dt = d( 1 2 m i v 2 i + 1 2Īiw 2 i ) = m i v i d v i + Ī i w i dw i mi v i d v i = d s i m i dt d v i = d v i m i dt d s i = m i ā i d s i O halde buradan: mi v i d v i = m i ā i d s i yazılır. Benzer olarak: Īwi dw i = Ī dθ i dt dw i = Ī dw i dt dθ i = Īα i dθ i (ā i ) t ivmesi cismin kütle merkezinin ā i ivmesinin teğetsel bileşenidir. Benzer şekilde θ i = α i çalışılan cismin açısal ivmesidir. Tüm sistem için: dt = m i ā i d s i + Īα i dθ i (1) mi ā i = R i ve Īα i = M Gi tanımlarıyla: dt = R i d s i + M Gi dθ i (2) yazılır. dθ i = dθ i k (Hareket düzlemde) (1) ve (2) denklemleri sistemin toplam kinetik enerji değişimi; dış kvvetlerin elemanter işi ile sisteme etkiyen çiftlerin (momentlerin bileşkesi) toplamına eşit olduğunu ifade eder. dv= Toplam potansiyel enerji değişimini yani dv g ve dv e nin toplamını ifade eder. V = V g + V e dif. formda: dv = d( m i gh i k jx 2 j) = m i gdh i + k j x j dx j h i ele alınan parçanın kütle merkezinin referans düzleminin üzerindeki uzaklığı, x j ise yayın deformasyonunu temsil eder. k j ise yay sabitidir. Yerlerine yazılırsa: du = dt + dv = m i ā i d s i + Īα i dθ i + m i gdh i + k j x j dx j (A) 24
 d gerçek diferansiyel yerdeğişimini, δ varsayılan (virtüel) diferansiyeli temsil")
25 Şekil 37: Bu denklem bize ivmeler ile aktif kuvvetler arasındaki bağıntıyı doğrudan verme şansı tanır. Bu denklemi virtüel yer değiştirme içinde yazarız yani δu = m i ā i δ s i + Īα i δθ i + m i gδh i + k j x j δx j (B) d gerçek diferansiyel yerdeğişimini, δ varsayılan (virtüel) diferansiyeli temsil eder. Örnek Problem 6/12: Şekildeki A dişli rayı hareketli ve B dişli rayı tesbit edilmiştir. Dişlinin kütlesi 2kg ve atalet yarıçapı k o = 60mm dir. Sabiti 1.2 kn/m olan yay şekildeki konumda 40 mm gerilmiştir. Verilen konum içim A rayının a ivmesini 80 N kuvvetin etkisinde hesaplayınız. Sistem düşey düzlemdedir. Çözüm6/12: Etkiyen aktif kuvvet sistemi 80N,ağırlık ve yay kuvvetidir. Korunumludur. A nın yukarıya doğru dx yerdeğiştirmesi sırasında 80N nun işi: du = 80dx olup x metre cinsindendir. 80dx işi, sistemin toplam enerji değişimine eşittir. (A) denklemindeki terimleri hesaplayalım: dt = m i ā i d s i + Īα i dθ i = dt ray + dt disli dt ray = du ray = d(max) = ma(dx) = 3adx dt disli = m i ā i d s i + Īα i dθ i dt disli = 2( a 2 )dx a/2 + 2(0.06) Sistemin toplam potansiyel enerjisi: dx/ = 0.781adx dv = dv g + dv e = m i gdh i + k j x j dx j dv ray = 3gdx = 3(9.81)dx = 29.4dx dv disli = 2g(dx/2) = gdx = 9.81dx 25
 ivmesinin yarısıdır. Aynı şekilde dişlinin kütle merkezinin yerdeğişimi rayın dx yerdeğişiminin yarısıdır(dx/2 dir). Yuvarlanan dişli için a = rα a i = (a/2)/0.")
26 Şekil 38: (A) da yerine yazılırsa dv yay = k j x j dx j = 1200(0.04)(dx/2) = 24dx 80dx = 3adx adx dx dx + 24dx a = 4.43m/s 2 NOT: ā i dişlinin kütle merkezi ivmesidir. Bu ivme rayın (A nın) ivmesinin yarısıdır. Aynı şekilde dişlinin kütle merkezinin yerdeğişimi rayın dx yerdeğişiminin yarısıdır(dx/2 dir). Yuvarlanan dişli için a = rα a i = (a/2)/0.08 ve açısal yerdeğitirme ds = rdθ dθ i = (dx/2)/0.08 Örnek Problem 6/13: Sabit P kuvveti şekildeki sistemin A noktasına etkiyor ve sisteme sağa doğru a ivmesini kazandırıyor. Çubukların birbiri ile yaptığı θ açısını daimi hal için hesaplayınız (Sistemin şeklinin bozulmadığı hal için) Çözüm 6/13: Ölçümleri A dan itibaren yaparsak P nin işini elimine etmiş oluruz. Her çubuğa bir virtüel yerdeğiştirme verelim. δu = 0 (Bakınız statikte virtüel iş konusu) (A) Kinetik enerji değişimi δt = mād s = ma( δs 1 ) + ma( δs 2 ) δt = ma[δ( 1 2 sinθ 2 ) + δ(3l 2 sinθ 2 )] δt = ma(lcos θ 2 δθ) yazılır. A dan geçen yatay doğrultu sıfır potansiyel seviyesi olacak şekilde seçelim. Böylece çubukların ağırlık pot. enerjisi: V g = 2mg( L 2 cosθ 2 ) 26
 de yazarsak δv g = δ( 2mg L 2 cosθ 2 ) = mgl 2 sinθ 2 δθ δu = δt + δv g 0 = malcos θ mgl δθ + 2 2 sinθ 2 δθ θ = 2 arctan 2a g Not: Problem 6/12 de olduğu gibi, bu problemde de")
27 Şekil 39: olur. ve virtüel iş değişimi dır. Bu değerleri (B) de yazarsak δv g = δ( 2mg L 2 cosθ 2 ) = mgl 2 sinθ 2 δθ δu = δt + δv g 0 = malcos θ mgl δθ sinθ 2 δθ θ = 2 arctan 2a g Not: Problem 6/12 de olduğu gibi, bu problemde de sistemi parçalarına ayırıp her parçanın serbest cisim diagramını çizmeye ve her parçaya düzlemsel hareket ve kuvvet-moment denklemlerinin tatbikine gerek kalmaz. Bu avantajdır. 0.7 İmpuls ve Momentum Denklemleri Lineer Momentum: Noktasal bir cisim için liner momentum G i = m i v i idi. Rijit bir cisim için G = m i v i = d( m i r i )/dt şeklinde yazılabilir.mr G = m i r i (Kütle merkezinin tanımı) bundan dolayı G = mv G elde ederiz. Not: G = mv G için: Katı cismin özelliğinden: v i = v G + ω ρ i G = m i (v G + ω ρ i ) G = m i v G + m i (ω ρ i ) 27
: F = Ġ ve t2 t 1 F dt = G2 G 1 yazılır.")
28 Şekil 40: Kinetik ve serbest cisim diagramı G = mv G + ω m i ρ i Burada ρ i kütle merkezinden ölçüldüğü için m i ρ i = 0 dır. O halde G = mv G dır. Bölüm 4/4 den Newtonun ikinci kanununu yeniden yazarsak (İmpuls- Momentum denklemi): F = Ġ ve t2 t 1 F dt = G2 G 1 yazılır. Bunun skaler bileşenlerini: Fx = Ġx ; t2 Fx dt = G x2 G x1 t 1 Fy = Ġy ; t2 Fy dt = G y2 G y1 t 1 a-açısal Momentum Bölüm 4/9 daki açısal momentum ve moment eşitliklerini yeniden yazarsak: MG = ḢG ve t2 MG dt = H G2 H G1 t 1 Herhangi bir O noktasına göre: H o = I G w + mv G d kullanılabilir. NOT: Eğer rijit cisim sabit bir O noktası etrafında dönüyorsa, v G = r G w, d = r G olur. Böylece H o = I G w + mrgw 2 bulunur. Ayrıca I o = I G + mrg 2 olduğu biliniyor. Sonuç olarak H o = I o w elde ederiz. Yeniden 4/2 bölümünden; M o = Ḣ o ifadesinde H o = I o w H o = I o ẇ yazılırsa M o = I o ẇ ve t 2 t Mo 1 dt = I o (w 2 w 1 ) denklemleri elde edilir. Bağlı Katı Cisimlerin (Katı Cisim Sistemleri) İmpuls-Momentum Denklemleri 28
29 Maddesel Nok. Sistemden elde edilen F = Ġ ve M o = H o denklemleri katı cisim sistemlerinin elemanlarının herbiri için yazılabilir ve toplamları alınarak: F = Ġ1 + Ġ Ġ n = Ġ Mo = Ḣ 1 + Ḣ Ḣ n = Ḣ o inregral formunda: t2 F = Ġ Fdt = G2 G 1 = G sis t 1 Mo = Ḣ o t2 Mo dt = H o2 H o1 = H osis t 1 Şeklinde elde edilir. NOT: Bağlantılardaki (A gibi) kuvvetler (reaksiyonlar) sistemin iç kuvvetleri olup, birbirlerini yok eden etki yaparlar. Yukarıdaki denklemlerde yeralmazlar. O tüm sistem için referans noktasıdır. Hareket Miktarının (Momentumun) Korunumu F = Ġ ifadesinde, eğer F = 0 ise Ġ = 0 d G dt = 0 G = sabit G 2 = G 1 veya G sis = 0 yazılır. Yani sistemin momentumundaki değişim sıfırdır. NOT: KCS nin bazı parçalarının momentumları değişebilir. Ama tüm sistemin hareket periyodunda momentumu sabit kalır. Bunu momentin impulsu sıfır ise yine söyleriz. Mo = Ḣ o dan M o = 0 ise Ḣo = dx H o t = 0 H o = sabit (H o1 ) sis = (H o2 ) sis veya H o = 0 elde edilir. Bu da bize açısal momentumun(moment of momentum=hareket miktarının momenti=hareket Momenti) sabit olduğunu yani korunumlu olduğunu söyler. Aynı sonucu G kütle merkezi için de söyleriz. (H G ) sis = 0 (H G2 ) sis = (H G1 ) sis 29
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU
 RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
RİJİT CİSMİN DÜZLEMSEL KİNETİĞİ: ENERJİNİN KORUNUMU Amaçlar: a) Korunumlu kuvvetlerin potansiyel enerjisinin hesabı. b) Enerjinin korunumu prensibinin uygulanması. ENERJİNİN KORUNUMU Enerjinin korunumu
KATI CİSMİN DÜZLEMSEL KİNETİĞİ
 KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
Fizik-1 UYGULAMA-7. Katı bir cismin sabit bir eksen etrafında dönmesi
 Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
Düzgün olmayan dairesel hareket
 Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Bölüm 9: Doğrusal momentum ve çarpışmalar
 Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Kuvvet. Kuvvet. Newton un 1.hareket yasası Fizik 1, Raymond A. Serway; Robert J. Beichner Editör: Kemal Çolakoğlu, Palme Yayınevi
 Kuvvet izik 1, Raymond A. Serway; Robert J. Beichner Editör: Kemal Çolakoğlu, Palme Yayınevi 2 Kuvvet Kuvvet ivmelenme kazandırır. Kuvvet vektörel bir niceliktir. Kuvvetler çift halinde bulunur. Kuvvet
Kuvvet izik 1, Raymond A. Serway; Robert J. Beichner Editör: Kemal Çolakoğlu, Palme Yayınevi 2 Kuvvet Kuvvet ivmelenme kazandırır. Kuvvet vektörel bir niceliktir. Kuvvetler çift halinde bulunur. Kuvvet
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
İş-Kinetik Enerji, Potansiyel Enerji, Enerji Korunumu
 İş-Kinetik Enerji, Potansiyel Enerji, Enerji Korunumu 1. Kütlesi 7 kg olan motorsuz oyuncak bir araba, sürtünmesiz yatay bir düzlem üzerinde 4 m/s ilk hız ile gitmektedir. Araba daha sonra ilk hızı ile
İş-Kinetik Enerji, Potansiyel Enerji, Enerji Korunumu 1. Kütlesi 7 kg olan motorsuz oyuncak bir araba, sürtünmesiz yatay bir düzlem üzerinde 4 m/s ilk hız ile gitmektedir. Araba daha sonra ilk hızı ile
KKKKK VERİLER. Yer çekimi ivmesi : g=10 m/s 2. Metrik Ön Takılar sin 45 = cos 45 = 0,7
 VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
VERİLER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin = cos = 0, Numara Ön Takı Simge sin = cos = 0,6 sin = cos = 0,8 10 9 giga G tan = 0, 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo k sin 60
DİNAMİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
7 TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Hareket, bir
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
HARRAN ÜNİVERSİTESİ 2016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ
 HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
HARRAN ÜNİVERSİTESİ 016 YILI ZİRAAT FAKÜLTESİ FİNAL SINAVI SORU ÖRNEKLERİ Soru 1 - Bir tekerlek, 3.5 rad/ s ' lik sabit bir açısal ivmeyle dönüyor. t=0'da tekerleğin açısal hızı rad/s ise, (a) saniyede
1 Rijit Cisimlerin Düzlemsel Kinematiği
 Şekil 1: Şekil 2: Katı (rijid) cismin düzlemsel hareket tipleri 1 Rijit Cisimlerin Düzlemsel Kinematiği 1.1 Giriş Dersin 2. bölümünde noktasal cismin kinematik bağıntılarını elde etmiştik. Aynı bağıntıları
Şekil 1: Şekil 2: Katı (rijid) cismin düzlemsel hareket tipleri 1 Rijit Cisimlerin Düzlemsel Kinematiği 1.1 Giriş Dersin 2. bölümünde noktasal cismin kinematik bağıntılarını elde etmiştik. Aynı bağıntıları
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
2. POTANSİYEL VE KİNETİK ENERJİ 2.1. CİSİMLERİN POTANSİYEL ENERJİSİ. Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir.
 BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Kinetik Problemleri için Çözüm yöntemleri i.) Newton un 2. yasası F = m a. ii.) İş-Enerji Yöntemi. iii.) İmpuls-momentum yöntemi
 Newton un 2. yasası F = m a. ii.) İş-Enerji Yöntemi. iii.) İmpuls-momentum yöntemi") Giriş Kinetik: Parçacığın hareketi ve parçacığın hareketini yaratan kuvvetler arasındaki ilişkiyi inceleyen bilim dalıdır. Kabaca bir formül ile ifade edilir. F = m a 1 Kinetik Problemleri için Çözüm yöntemleri
Giriş Kinetik: Parçacığın hareketi ve parçacığın hareketini yaratan kuvvetler arasındaki ilişkiyi inceleyen bilim dalıdır. Kabaca bir formül ile ifade edilir. F = m a 1 Kinetik Problemleri için Çözüm yöntemleri
FIZ Uygulama Vektörler
 Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
KKKKK. Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I
 Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I 1. Sınav süresi 10 dakikadır.. Bu sınavda eşit puanlı 0 adet soru vardır.. Elinizdeki soru kitapçığı K türü soru kitapçığıdır.. Yanıtlarınızı Yanıt Kağıdı
Adı Soyadı : Numarası : Bölümü : İmzası : FİZİK I 1. Sınav süresi 10 dakikadır.. Bu sınavda eşit puanlı 0 adet soru vardır.. Elinizdeki soru kitapçığı K türü soru kitapçığıdır.. Yanıtlarınızı Yanıt Kağıdı
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Fizik 101: Ders 17 Ajanda
 izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
DİNAMİK DERS NOTLARI. Doç.Dr. Cesim ATAŞ
 DİNMİK DERS NOTLRI Kaynaklar: Engineering Mechanics: Dynamics,, SI Version, 6th Edition, J. L. Meriam,, L. G. Kraige Vector Mechanics for Engineers: : Dynamics, Sith Edition, Beer and Johnston Doç.Dr.
DİNMİK DERS NOTLRI Kaynaklar: Engineering Mechanics: Dynamics,, SI Version, 6th Edition, J. L. Meriam,, L. G. Kraige Vector Mechanics for Engineers: : Dynamics, Sith Edition, Beer and Johnston Doç.Dr.
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ KÜTLE ATALET MOMENTİ Bugünün Hedefleri: 1. Rijit bir cismin
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ KÜTLE ATALET MOMENTİ Bugünün Hedefleri: 1. Rijit bir cismin
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin 4 = cos 4 = 0,7 Rakam Ön Takı Simge sin 7 = cos = 0,6 sin = cos 7 = 0,8 10 9 giga G tan 7 = 0,7 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo
VERİER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin 4 = cos 4 = 0,7 Rakam Ön Takı Simge sin 7 = cos = 0,6 sin = cos 7 = 0,8 10 9 giga G tan 7 = 0,7 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo
Fizik 101-Fizik I
 Fizik 101-Fizik I 2013-2014 Potansiyel Enerji ve Enerjinin Korunumu Nurdan Demirci Sankır Ofis: 325, Tel:4331 Potansiyel enerji (U) bir cisimler sisteminin enerjisidir. Başka bir deyişle, cisimler sisteminin
Fizik 101-Fizik I 2013-2014 Potansiyel Enerji ve Enerjinin Korunumu Nurdan Demirci Sankır Ofis: 325, Tel:4331 Potansiyel enerji (U) bir cisimler sisteminin enerjisidir. Başka bir deyişle, cisimler sisteminin
Potansiyel Enerji. Fiz Ders 8. Kütle - Çekim Potansiyel Enerjisi. Esneklik Potansiyel Enerjisi. Mekanik Enerjinin Korunumu
 Fiz 1011 - Ders 8 Potansiyel Enerji Kütle - Çekim Potansiyel Enerjisi Esneklik Potansiyel Enerjisi Mekanik Enerjinin Korunumu Korunumlu ve Korunumsuz Kuvvetler Enerji Diyagramları, Sistemlerin Dengesi
Fiz 1011 - Ders 8 Potansiyel Enerji Kütle - Çekim Potansiyel Enerjisi Esneklik Potansiyel Enerjisi Mekanik Enerjinin Korunumu Korunumlu ve Korunumsuz Kuvvetler Enerji Diyagramları, Sistemlerin Dengesi
Fizik 101-Fizik I
 Fizik 101-Fizik I 2013-2014 Dairesel Hareket ve Newton Kanunlarının Diğer Uygulamaları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Newton nun İkinci Yasasının Düzgün Dairesel Harekete Uygulanması Sabit hızla
Fizik 101-Fizik I 2013-2014 Dairesel Hareket ve Newton Kanunlarının Diğer Uygulamaları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Newton nun İkinci Yasasının Düzgün Dairesel Harekete Uygulanması Sabit hızla
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Fizik 101: Ders 18 Ajanda
 Fizik 101: Ders 18 Ajanda Özet Çoklu parçacıkların dinamiği Makara örneği Yuvarlanma ve kayma örneği Verilen bir eksen etrafında dönme: hokey topu Eğik düzlemde aşağı yuvarlanma Bowling topu: kayan ve
Fizik 101: Ders 18 Ajanda Özet Çoklu parçacıkların dinamiği Makara örneği Yuvarlanma ve kayma örneği Verilen bir eksen etrafında dönme: hokey topu Eğik düzlemde aşağı yuvarlanma Bowling topu: kayan ve
Bir cisme etki eden kuvvetlerin bileşkesi sıfır ise, cisim ya durur, ya da bir doğru boyunca sabit hızla hareketine devam eder.
 DİNAMİK Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Dinamiğin üç temel prensibi vardır. 1. Eylemsizlik
DİNAMİK Hareket veya hareketteki değişmelerin sebeplerini araştırarak kuvvetle hareket arasındaki ilişkiyi inceleyen mekaniğin bölümüne dinamik denir. Dinamiğin üç temel prensibi vardır. 1. Eylemsizlik
O xyz OXYZ. Düzgün Doğrusal Öteleme. O 1 in yörüngesi bir Doğru olacak
 3.14 Bağıl Hareket Bu ana kadar Newton un ikinci kanununu, enerji-iş eşitliklerini ve impuls-momentum eşitliklerini, sait ir eksen takımına göre uyguladık. Gerçekte hiç ir eksen takımı ise gerçekte sait
3.14 Bağıl Hareket Bu ana kadar Newton un ikinci kanununu, enerji-iş eşitliklerini ve impuls-momentum eşitliklerini, sait ir eksen takımına göre uyguladık. Gerçekte hiç ir eksen takımı ise gerçekte sait
EĞİTİM ÖĞRETİM YILI BAHAR DÖNEMİ DİNAMİK DERSİ FİNAL SINAVI ÖNCESİ ÖDEV SORULARI
 PROBLEM 13.59 2016-2017 EĞİTİM ÖĞRETİM YILI BAHAR DÖNEMİ DİNAMİK DERSİ FİNAL SINAVI ÖNCESİ ÖDEV SORULARI Kütlesi 1,2 kg lık bir C bileziği bir yatay çubuk boyunca sürtünmesiz kayıyor. Bilezik her birinin
PROBLEM 13.59 2016-2017 EĞİTİM ÖĞRETİM YILI BAHAR DÖNEMİ DİNAMİK DERSİ FİNAL SINAVI ÖNCESİ ÖDEV SORULARI Kütlesi 1,2 kg lık bir C bileziği bir yatay çubuk boyunca sürtünmesiz kayıyor. Bilezik her birinin
Fizik 101: Ders 21 Gündem
 Fizik 101: Ders 21 Gündem Yer çekimi nedeninden dolayı tork Rotasyon (özet) Statik Bayırda bir araba Statik denge denklemleri Örnekler Asılı tahterevalli Asılı lamba Merdiven Ders 21, Soru 1 Rotasyon Kütleleri
Fizik 101: Ders 21 Gündem Yer çekimi nedeninden dolayı tork Rotasyon (özet) Statik Bayırda bir araba Statik denge denklemleri Örnekler Asılı tahterevalli Asılı lamba Merdiven Ders 21, Soru 1 Rotasyon Kütleleri
İş, Güç ve Enerji. Fiz Ders 7. Sabit Bir Kuvvetin Yaptığı İş. Değişen Bir Kuvvetin Yaptığı İş. Güç. İş-Kinetik Enerji Teoremi
 Fiz 1011 - Ders 7 İş, Güç ve Enerji Sabit Bir Kuvvetin Yaptığı İş Değişen Bir Kuvvetin Yaptığı İş Güç İş-Kinetik Enerji Teoremi http://kisi.deu.edu.tr/mehmet.tarakci/ Günlük yaşamda iş kavramı bir çok
Fiz 1011 - Ders 7 İş, Güç ve Enerji Sabit Bir Kuvvetin Yaptığı İş Değişen Bir Kuvvetin Yaptığı İş Güç İş-Kinetik Enerji Teoremi http://kisi.deu.edu.tr/mehmet.tarakci/ Günlük yaşamda iş kavramı bir çok
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017
 Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017") SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
11. SINIF KONU ANLATIMLI. 1. ÜNİTE: KUVVET VE HAREKET 7. Konu İTME VE ÇİZGİSEL MOMENTUM ETKİNLİK VE TEST ÇÖZÜMLERİ
 . SINIF KONU ANLATIMLI. ÜNİTE: KUVVET VE HAREKET 7. Konu İTME VE ÇİZGİSEL MOMENTUM ETKİNLİK VE TEST ÇÖZÜMLERİ 7 İtme ve Çizgisel Momentum. Ünite 7. Konu (İtme ve Çizgisel Momentum) A nın Çözümleri. Eğik
. SINIF KONU ANLATIMLI. ÜNİTE: KUVVET VE HAREKET 7. Konu İTME VE ÇİZGİSEL MOMENTUM ETKİNLİK VE TEST ÇÖZÜMLERİ 7 İtme ve Çizgisel Momentum. Ünite 7. Konu (İtme ve Çizgisel Momentum) A nın Çözümleri. Eğik
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Fizik 101-Fizik I Hareket Kanunları. Nurdan Demirci Sankır Ofis: 325, Tel:4331 Enerji Araştırmalrı Laboratuarı (YDB- Bodrum Kat) İçerik
 İçerik") Fizik 101-Fizik I 2013-2014 Hareket Kanunları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Enerji Araştırmalrı Laboratuarı (YDB- Bodrum Kat) İçerik Kuvvet Kavramı Newton nun Birinci Yasası ve Eylemsizlik
Fizik 101-Fizik I 2013-2014 Hareket Kanunları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Enerji Araştırmalrı Laboratuarı (YDB- Bodrum Kat) İçerik Kuvvet Kavramı Newton nun Birinci Yasası ve Eylemsizlik
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
ÖDEV SETİ 4. 1) Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir.
 Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir.") ÖDEV SETİ 4 1) Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir. 2) a) 3 kg lık b) 7 kg lık blok iki ip ile şekildeki gibi bağlanıyor, iplerdeki gerilme
ÖDEV SETİ 4 1) Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir. 2) a) 3 kg lık b) 7 kg lık blok iki ip ile şekildeki gibi bağlanıyor, iplerdeki gerilme
Hareket Kanunları. Newton un Hareket Kanunları. Fiz 1011 Ders 5. Eylemsizlik - Newton un I. Yasası. Temel - Newton un II. Yasası
 Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
KONU 3. STATİK DENGE
 KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Fizik 101: Ders 6 Ajanda. Tekrar Problem problem problem!! ivme ölçer Eğik düzlem Dairesel hareket
 Fizik 101: Ders 6 Ajanda Tekrar Problem problem problem!! ivme ölçer Eğik düzlem Dairesel hareket Özet Dinamik. Newton un 3. yasası Serbest cisim diyagramları Problem çözmek için sahip olduğumuz gereçler:
Fizik 101: Ders 6 Ajanda Tekrar Problem problem problem!! ivme ölçer Eğik düzlem Dairesel hareket Özet Dinamik. Newton un 3. yasası Serbest cisim diyagramları Problem çözmek için sahip olduğumuz gereçler:
ĐŞ GÜÇ ENERJĐ. Zaman. 5. Uygulanan kuvvet cisme yol aldıramıyorsa iş yapılmaz. W = 0
 ĐŞ GÜÇ ENERJĐ Đş kelimesi, günlük hayatta çok kullanılan ve çok geniş kapsamlı bir kelimedir. Fiziksel anlamda işin tanımı tektir.. Yapılan iş, kuvvet ile kuvvetin etkisinde yapmış olduğu yerdeğiştirmenin
ĐŞ GÜÇ ENERJĐ Đş kelimesi, günlük hayatta çok kullanılan ve çok geniş kapsamlı bir kelimedir. Fiziksel anlamda işin tanımı tektir.. Yapılan iş, kuvvet ile kuvvetin etkisinde yapmış olduğu yerdeğiştirmenin
3. KUVVET SİSTEMLERİ
 3. KUVVET SİSTEMLERİ F F W P P 3.1 KUVVET KAVRAMI VE ETKİLERİ Kuvvet, bir cisme etki eden yapısal yüklerdir. Kuvvet Şiddeti, yönü ve uygulama noktası olan vektörel bir büyüklüktür. Bir cismin üzerine uygulanan
3. KUVVET SİSTEMLERİ F F W P P 3.1 KUVVET KAVRAMI VE ETKİLERİ Kuvvet, bir cisme etki eden yapısal yüklerdir. Kuvvet Şiddeti, yönü ve uygulama noktası olan vektörel bir büyüklüktür. Bir cismin üzerine uygulanan
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
Fizik 103 Ders 9 Dönme, Tork Moment, Statik Denge
 Fizik 3 Ders 9 Döne, Tork Moent, Statik Denge Dr. Ali ÖVGÜN DAÜ Fizik Bölüü www.aovgun.co q θ Döne Kineatiği s ( π )r θ nın birii radyan (rad) dır. Bir radyan, yarçapla eşit uzunluktaki bir yay parasının
Fizik 3 Ders 9 Döne, Tork Moent, Statik Denge Dr. Ali ÖVGÜN DAÜ Fizik Bölüü www.aovgun.co q θ Döne Kineatiği s ( π )r θ nın birii radyan (rad) dır. Bir radyan, yarçapla eşit uzunluktaki bir yay parasının
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
TEKNOLOJİNİN BİLİMSEL İLKELERİ
 TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü
 Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 kışkan Statiğine Giriş kışkan statiği (hidrostatik, aerostatik), durgun haldeki akışkanlarla
Yrd. Doç. Dr. Fatih TOSUNOĞLU Erzurum Teknik Üniversitesi Mühendislik Fakültesi İnşaat Mühendisliği Bölümü 1 kışkan Statiğine Giriş kışkan statiği (hidrostatik, aerostatik), durgun haldeki akışkanlarla
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
DİNAMİK Ders_3. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
TEKNOLOJİNİN BİLİMSEL İLKELERİ. Öğr. Gör. Adem ÇALIŞKAN
 TEKNOLOJİNİN BİLİMSEL İLKELERİ 4 Skaler: Fiziki büyüklükler SKALER BÜYÜKLÜK SEMBOLÜ BİRİMİ Kütle m Kilogram Hacim V m 3 Zaman t Saniye Sıcaklık T Kelvin Sadece sayısal değer ve birim verilerek ifade edilen
TEKNOLOJİNİN BİLİMSEL İLKELERİ 4 Skaler: Fiziki büyüklükler SKALER BÜYÜKLÜK SEMBOLÜ BİRİMİ Kütle m Kilogram Hacim V m 3 Zaman t Saniye Sıcaklık T Kelvin Sadece sayısal değer ve birim verilerek ifade edilen
Fizik 101: Ders 4 Ajanda
 Fizik 101: Ders 4 Ajanda Tekrar ve devam: Düzgün Dairesel Hareket Newton un hareket yasaları Cisimler neden ve nasıl hareket ederler? Düzgün Dairesel Hareket Ne demektir? Nasıl tanımlarız? Düzgün Dairesel
Fizik 101: Ders 4 Ajanda Tekrar ve devam: Düzgün Dairesel Hareket Newton un hareket yasaları Cisimler neden ve nasıl hareket ederler? Düzgün Dairesel Hareket Ne demektir? Nasıl tanımlarız? Düzgün Dairesel
KUVVET için F KÜTLE için m İVME için a
 4 III. EWTO MEKİĞİİ TEMEL KULI: Kütlesi ölçülebilecek kadar küçük bir cisim üzerine, şiddeti ölçülebilen bir kuvvet tatbik edelim. ir eksen sistemi seçerek cismin sisteme göre hareketini gözleyelim. u
4 III. EWTO MEKİĞİİ TEMEL KULI: Kütlesi ölçülebilecek kadar küçük bir cisim üzerine, şiddeti ölçülebilen bir kuvvet tatbik edelim. ir eksen sistemi seçerek cismin sisteme göre hareketini gözleyelim. u
Ödev 1. Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N
 Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
1.Seviye ITAP 17 Aralık_2012 Sınavı Dinamik VIII-Dönme_Sorular
 1.Seviye ITAP 17 Aralık_01 Sınavı Dinamik VIII-Dönme_Sorular 3.1.Dünyanın kendi dönme eksenine göre eylemsiz momentini ve açısal momentumunu bulunuz. 37 33 A) I = 9.7 10 kg m ; L = 7 10 kg m / s 35 31
1.Seviye ITAP 17 Aralık_01 Sınavı Dinamik VIII-Dönme_Sorular 3.1.Dünyanın kendi dönme eksenine göre eylemsiz momentini ve açısal momentumunu bulunuz. 37 33 A) I = 9.7 10 kg m ; L = 7 10 kg m / s 35 31
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
DİNAMİK 01 Giriş ve Temel Prensipler
 DİNAMİK 01 Giriş ve Temel Prensipler Dinamik, kuvvet ile hareket arasındaki ilişkiyi inceler. Kuvvet Hareketsiz bir cismi harekete ettiren ve ya hareketini değiştiren etkiye kuvvet denir. Dinamiğin, Newton
DİNAMİK 01 Giriş ve Temel Prensipler Dinamik, kuvvet ile hareket arasındaki ilişkiyi inceler. Kuvvet Hareketsiz bir cismi harekete ettiren ve ya hareketini değiştiren etkiye kuvvet denir. Dinamiğin, Newton
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 8 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 14 Kasım 1999 Saat: 18.20 Problem 8.1 Bir sonraki hareket bir odağının merkezinde gezegenin
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 8 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 14 Kasım 1999 Saat: 18.20 Problem 8.1 Bir sonraki hareket bir odağının merkezinde gezegenin
Öğr. Gör. Serkan AKSU
 Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Fizik 101: Ders 7 Ajanda
 Fizik 101: Ders 7 Ajanda Sürtünme edir? asıl nitelendirebiliriz? Sürtünme modeli Statik & Kinetik sürtünme Sürtünmeli problemler Sürtünme ne yapar? Yeni Konu: Sürtünme Rölatif harekete karşıdır. Öğrendiklerimiz
Fizik 101: Ders 7 Ajanda Sürtünme edir? asıl nitelendirebiliriz? Sürtünme modeli Statik & Kinetik sürtünme Sürtünmeli problemler Sürtünme ne yapar? Yeni Konu: Sürtünme Rölatif harekete karşıdır. Öğrendiklerimiz
Fizik 203. Ders 5 İş-Enerji- Momentum Ali Övgün. Ofis: AS242 Fen ve Edebiyat Fakültesi Tel:
 Fizik 203 Ders 5 İş-Enerji- Momentum Ali Övgün Ofis: AS242 Fen ve Edebiyat Fakültesi Tel: 0392-630-1379 ali.ovgun@emu.edu.tr www.aovgun.com İşinTanımı Güç KinetikEnerji NetKuvvetiçinİş-EnerjiTeoremi EnerjininKorunumuYasası
Fizik 203 Ders 5 İş-Enerji- Momentum Ali Övgün Ofis: AS242 Fen ve Edebiyat Fakültesi Tel: 0392-630-1379 ali.ovgun@emu.edu.tr www.aovgun.com İşinTanımı Güç KinetikEnerji NetKuvvetiçinİş-EnerjiTeoremi EnerjininKorunumuYasası
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı. Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
İÇİNDEKİLER
 İÇİNDEKİLER 27.10.2016 DİNAMİK 01 Giriş ve Temel Prensipler Dinamiğin Prensipleri (Newton Kanunları) 1) Eylemsizlik Prensibi (Dengelenmiş Kuvvetler) 2) Temel Prensip (Dengelenmemiş Kuvvetler) 3) Etki-Tepki
İÇİNDEKİLER 27.10.2016 DİNAMİK 01 Giriş ve Temel Prensipler Dinamiğin Prensipleri (Newton Kanunları) 1) Eylemsizlik Prensibi (Dengelenmiş Kuvvetler) 2) Temel Prensip (Dengelenmemiş Kuvvetler) 3) Etki-Tepki
11. SINIF SORU BANKASI. 1. ÜNİTE: KUVVET VE HAREKET 7. Konu İTME VE ÇİZGİSEL MOMENTUM TEST ÇÖZÜMLERİ
 . SINIF SORU BANKASI. ÜNİTE: KUVVET VE HAREKET 7. Konu İTME VE ÇİZGİSEL MOMENTUM TEST ÇÖZÜMLERİ 7 İtme e Çizgisel Momentum Test in Çözümleri. Patlamadan önceki momentum +x yönünde; P 5 4 0 kg.m/s. Cismin
. SINIF SORU BANKASI. ÜNİTE: KUVVET VE HAREKET 7. Konu İTME VE ÇİZGİSEL MOMENTUM TEST ÇÖZÜMLERİ 7 İtme e Çizgisel Momentum Test in Çözümleri. Patlamadan önceki momentum +x yönünde; P 5 4 0 kg.m/s. Cismin