4. Mühendislik Ölcmeleri Sempozyumu
|
|
|
- Ufuk Cerci
- 6 yıl önce
- İzleme sayısı:
Transkript



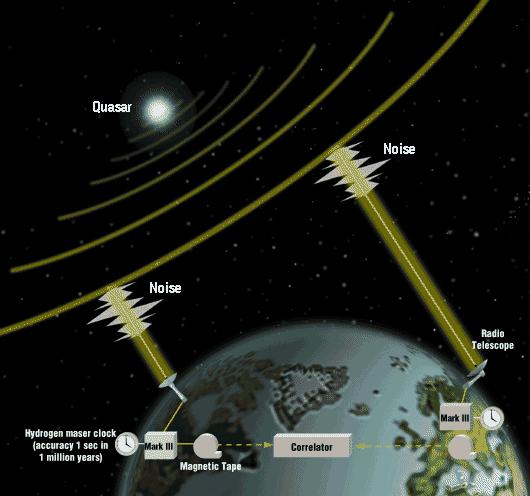
1 4. Mühendislik Ölcmeleri Sempozyumu JEODEZİK VLBI ÇALIŞMALARININ IERS ÜRÜNLERİNE KATKISI ve KTÜ GEOD IVS ANALİZ MERKEZİNİN ÖNGÖRÜLEN FAALİYETLERİ Emine Tanir Kamil Teke Johannes Boehm Harald Schuh



2
3 VLBI GEOMETRIK MODELI c(τ obs -( τ clock + τ trop + τ ionos + τ rel )) = c.(t 2 -t 1 ) = k [r 2 (t 1 )-r 1 (t 1 )]+ k β [t 2 -t 1 ] k β : direction of the wave front : mean velocity vector of #2 L wave front at time t 1 k * Vectors are defined in Solar-System-Barycentric k baseline vector r 2 (t 2 ) r 2 (t 1 ) β[ t t ] 2 1 POSITION OF STATION #2 AT TIME t1 r 1 (t 1 ) POSITION OF STATION #1 WHEN WAVE FRONT CROSSES IT AT TIME t1
4 VLBI TEMEL ESITLIGI 1 τobs =. kcrf. Φ. RWb.. TRF + τcorrections c cosδ cos α X2( t2) X1( t1) 1 τobs = cos δ sin α Φ RW Y ( t ) Y ( t ) c sin δ Z2( t2) Z1( t1) CRF TRF + τ + τ + τ + τ + τ j abb. t abb. Re l. Tid. Load. + τ + τ + τ + τ + τ Instr. Clock Ion. Atm h Atm w Sovers, vd., 1998
5 Sürekli Parcali Lineer (SPL) Ofset Fonksiyonu (VieVS) x n x 2 x o x 1 L x 3 x n-1 t o = d t 1 =6 d t t Lt () = x + ( x x ) j i, j i, j+ 1 i, j tj+ 1 tj k dl t-tj = (1- ) dy( k) mod el ( s) s = 1, 2,,15 dx t -t i, j j+ 1 j k dl t-tj = ( ) dy( k) mod el( s) s = 1,2,,15 dx t -t i, j+ 1 j+ 1 j t 2 =12 d t t t t n =144 d n-1 =138 d 3 =18 d SPL offset fonksiyonu Birinci ofsete göre kismi türev Ikinci ofsete göre kismi türev Teke, vd., 29
6 Sürekli Parcali Lineer (SPL) Ofset Fonksiyonu ve Dizayn matrisi (VieVS) dl dl dl dl dx1,1 dx1,2 dx2,1 dx2,2 dl dl dl dl dx dx dx dx dl dl dl dl dx dx dx dx ,1 2,2 3,1 3, ,1 1,2 3,1 3,2 Üç radyo teleskobunun, bir kuasara yaptığı taramadan elde edilen üç ölçüyü içeren, tek kestirim aralıklı dizayn matrisi x x = ± m Ofsetler arasindaki relatif kisitlayicilar i, j+ 1 i, j Δx (dizayn matrisine eklenen sahte-ölcü denklemleri) Boehm, vd., 29
7 A(1).sm (Clock error model, piecewise linear offsets) H(1).sm (Relative constraints between clock pwl offsets) A(2).sm (Clock error model, rates & quadratic terms) A(3).sm (Tropospheric zenith wet delay (zwd) model, pwl offsets H(3).sm (Relative constraints between zwd, pwl offsets) A(4).sm (Tropospheric north gradients, pwl offsets) H(4).sm (Relative constraints between north gradients, pwl offsets)... A(5).sm (Tropospheric east gradients, pwl offsets) H(5).sm (Relative constraints between east gradients, pwl offsets) A(6).sm (Earth Orientation Parameters (EOP), Xpol, pwl offsets) H(6).sm (Relative constraints between Xpol, pwl offsets) A(7).sm (EOP, Ypol, pwl offsets) A(8).sm (EOP, dut1, pwl offsets) H(7).sm (Relative constraints between Ypol, pwl offsets) H(8).sm (Relative constraints between dut1, pwl offsets)......
8 A(9).sm (EOP, nutation in obliquity (nutdx ~ deps) pwl offsets) H(9).sm (Relative constraints between nutdx, pwl offsets) A(1).sm (EOP, nutation in celestial longitude (nutdy ~ dpsi) pwl offsets) H(1).sm (Relative constraints between nutdy, pwl offsets) A(11).sm (Source coordinates (Greenwich hour angle, right ascension) pwl offsets H(11).sm (Relative constraints between right ascension, pwl offsets) A(12).sm (Source coordinates (CRF) (declination) pwl offsets H(12).sm (Relative constraints between decliantion, pwl offsets) A(13).sm (Antenna coordinates (TRF) (dx) one offset or pwl offsets) H(13).sm (Relative constraints between antenna dx, pwl coordinate offsets) A(14).sm (Antenna coordinates (TRF) (dy) one offset or pwl offsets) H(14).sm (Relative constraints between antenna dy, pwl coordinate offsets) A(15).sm (Antenna coordinates (TRF) (dz) one offset or pwl offsets) H(15).sm (Relative constraints between antenna dz, pwl coordinate offsets)
9 Kisitlayici ve Kosul Denklemleri Dizayn matrisine eklenen pseudo-gözlem denklemleri (ofsetler arasindaki kisitlayicilar relative constrain equations) Normal denklemlerin katsayilari matrisine eklenen kosul denklemleri (Condition equations) (TRF koordinat sistemine Helmert dönüsümü icin NNT/NNR kosullari) (VieVS) x x m i, j+ 1 i, j= ± Δx Hi = C = z y z x y z i i i xi yi xi i i i H H1 H H 2 = NNT NNR NNS 15
10 Saat hata modeli pwl ofsetleri Saat hata modeli NNT kosul denklemleri Saat hata modeli rate ve kuadratik terimleri B T C T Source koordinatlari pwl ofsetleri [N ra & N de ] Source koordinatlari NNR kosul denklemleri Istasyon koordinatlari pwl offsetleri [ N X, N Y, N Z ] Istasyon koordinatlari NNT/NNR kosul denklemleri D T B Istasyon koordinatlari NNT/NNR kosul denklemleri 6x6 C Source koordinatlari NNR kosul denklemleri 2x2 Saat hata modeli NNT kosul denklemleri D 1x1
11 EKK Dengeleme Modeli (VieVS) v A l dx v = c H h P P c A = [ A1 A1... A15] N toplam T T T A PA + H PC H C = C b total T T A Pl + H PC h = b c dx dx = = N b 1 toplam toplam toplam x c T T m = ( v Pv + v P v )/ dof o c c c dof = nölcü + nkosul nbilinmeyenler Boehm, vd., 29
12 Atomik saatler ve Hidrojen Maserlar Sezyum atomik saatlerin yerine VLBI istasyonlarinda hidrojen maserlar kullanilmaya baslanmistir. Hidrojen maserlar 63 milyon yilda 1 saniye hata yaparlar. Diger bir ifade ile zamani belirleme duyarliklari ~3x1-12 saniyedir (~ 3 pikosaniye), bu zaman icerisinde isik ~1 mm yol alabilir. Tüm frekans ve ofset tutarsizliklarindan arindirilmis bu saatler ile atmosfersiz, gravite potansiyeli sabit, jeofizik ve relativistik etkenlerin olmadigi inersiyal bir sistemde sadece gecikme (delay) modeli ile hesaplanan VLBI konum duyarligi 1 mm nin altinda olacaktir. Günümüz VLBI konum duyarligi, mm ler düzeyindedir. Jeofizik ve stokastik hata modellerinin duyarligi arttirildikca da VLBI parametrelerinin kestirim duyarligi artacaktir. Her VLBI istasyonundaki atomik saatin frekans tutarsizliklarindan ve offsetlerindeki farkliliklardan kaynaklanan hatalar, ve eger sicrama (break, jump) olusmus ise bunlar modellenerek giderilir. Saat hatasi modeli: τ = β + β ( t t ) + β ( t t ) saat ( s) saat ( s) saat ( s) saat( s) saat( s) 2 saat 1 i 2 i ( s ) t t L() t = x + ( x x ) n 1 i, j i, j+ 1 i, j tn tn 1 Δ τ = τ τ saat s s saat saat ( 1, ) s 1 s Parcali lineer ofsetler fonksiyonu Saatler icin ölcü denklemi iki saat toplam hatalari farki Quadratik polinom

13

14 Troposferin modellenmesi Principle of ray-tracing local zenith outgoing elevation angle observed elevation angle vacuum elevation angle by courtesy of Andrea Pany
15 Troposphere Delay state-of-the-art modeling of troposphere delay: ΔL = ΔL hz mf h (e) + ΔL wz mf w (e) + ΔL ΔL hz / ΔL w h mf h / mf w e mf g G N / G E α mf g (e) [G N cos(α) + G E sin(α)] Davis, vd. 1985; Boehm, vd., 26 troposphere total delay zenith hydrostatic/wet delay mapping function hydrostatic/wet elevation angle mf h cot(e) or mf w cot(e) north/east gradient azimuth IERS Conventions 23
16 m hw, TROPOSPHERIC MAPPING FUNCTIONS () e = sin( e) + ai 1+ bi 1+ ci ai bi sin( e) + ci sin( e) + sin( e) + Niell Mapping Function Isobaric Mapping Function Vienna Mapping Function e : Elevation cut off angle a i, b i, c i, = f( ϕ, H, doy, t, α,...) ϕ : station latitude H : station orthometric height doy : day of year P : surface total pressure t : surface temperature α : tempreature lapse rate Some other mapping functions: Chao, Lanyi, CfA, Ifadis, Davis, MTT, B&E, F&K, UNBabc, UNBab
17 Boehm, vd., 29
18 Modeling azimuthal asymmetries classical gradients (IERS Conventions 23) ΔL asymm = mf g (e) [G N cos(α) + G E sin(α)] 3mm without modeling asymmetries classical gradients applied -2-3 by courtesy of Andrea Pany
19 Boehm, vd., 29
20 CONT5 baseline length repeatabilities (cut off : 5 ) Number of observables (CONT 5) 6156 #1 #2 Teke, vd., 28
21 CONT5 baseline length repeatabilities (VMF1) Teke, vd., 28 Number of observables (CONT 5)
")

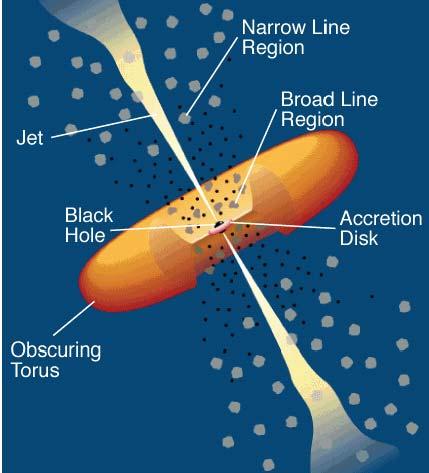
22 Source (kuazar) yapisi by courtesy of Bill Petrachenko

23 Uluslararasi Göksel Referans Catisi (ICRF) 132 defining source ortak ICRF-Ext2 tüm source lar ICRF2 defining sources 717 source, 212 si tanimlayici (NNR kosul denklemleri uygulananlar) (ICRF-Ext2) ICRF2 bu bildirinin hazirlanmasi esnasinda resmi olarak olusturulmustur. 295 i tanimlayici olmak üzere 4 micro-as noise flooru asmayan 3414 adet stable ve kompakt source dan (kuazardan) olusmaktadir
24 Ma, vd., 1998; Fey, vd., 24

25
 X () t X = + +Δ +Δ")


26 X() t X( t ) v.( t t ) X () t X = + +Δ +Δ IERS Conventions 23 ITRF 25 ITRF ΔX 2. jeofizik _ mod el( i) kestirim Boehm, vd., 29; by courtesy of Hana Spicakova
 X () t X = + +Δ +Δ IERS")
 kestirim Boehm, vd.")
27 X() t X( t ) v.( t t ) X () t X = + +Δ +Δ IERS Conventions 23 ITRF 25 ITRF ΔX 2. jeofizik _ mod el( i) kestirim Boehm, vd., 29; by courtesy of Hana Spicakova
 +Δ X () t +ΔX ITRF")
")

28 X() t = X( t ) + v.( t t ) +Δ X () t +ΔX ITRF 25 ITRF ΔX 2. jeofizik _ mod el( i) kestirim IERS Conventions 23 Boehm, vd., 29; by courtesy of Hana Spicakova
29 IERS Conventions 23
30 Yer dönme parametreleri (EOP), ICRF ve ITRF arasındaki ilişki Schuh, vd., 28 1 Y = cos( yp) sin( yp) sin( yp) cos( y ) p cos( xp) sin( xp) X = 1 sin( xp) cos( xp) cos( H) sin( H) R= sin( H) cos( H) 1 X () t = X () t + nutdx cos( H) sin( H) sin( xp)cos( H) sin( yp)sin( H) RXY = sin( H ) cos( H ) sin( xp)sin( H ) + sin( y p)cos( H ) sin( xp) sin( yp) 1 H : gercek ekinoks saat acisi x, y : Yer ortalama dönmeekseni kutbu koordinatlari p CIP CIP IERS C p IAU 2 A 4 Yt () = Yt () + nutdy CIP CIP IERS C IAU 2 A 4 Nutasyon (CIP koordinatlari) IERS Conventions 23
 Figure axis Atalet")
 rf")
31 Kutup gezinmesi ve gün uzunlugu (Yerin dönme hizi) Figure axis Atalet (Eylemsizlik momenti) i i L = rmv sin( θ ) τ = i i i i i Tork (Kuvvet momenti) rf sin( θ ) i i i i i
")

32 Yüksek frekanslı (saatlik) Yer dönme ekseni açısı (hızı) Eanes modeli ile hesaplanan degerleri ve VieVS kestirim değerleri


33 Yüksek frekanslı (saatlik) Yer dönme ekseni kutbu referans meridyeni doğrultusu koordinatları ve jeofizik modeller ile VieVS kestirim değerleri

34 Yüksek frekanslı (saatlik) Yer dönme ekseni kutbu 9 batı boylamı doğrultusu koordinatları ve jeofizik modeller ile VieVS kestirim değerleri
35 IAU 2A prezesyon-nutasyon modelinden hesaplanan nutasyon açıları, IERS C4 serisi düzeltmeleri, ve VieVS kestirim değerleri
36 IAU 2A prezesyon-nutasyon modelinden hesaplanan nutasyon açıları, IERS C4 serisi düzeltmeleri, ve VieVS kestirim değerleri
 bileseni Harmonik (periodik örn. tidal yüklemeler) bilesen Lineer ve harmonik olmayan (episodik, örn. deprem vs.) bilesen random noise A : k.istasyon, ve p.")
37 Koordinat zaman serisi analizi t t r () t r ( t ) r ( t t ) A cos(2 f t ) ( r r ) ( t t t ) n i k = k + k + π kp kp + φ kp + Δ k, i 1 k, i kt i i 1 p 1 ti 1 t ε + Δ + < < + = + i T epogu koordinatlari Lineer trend (hiz) bileseni Harmonik (periodik örn. tidal yüklemeler) bilesen Lineer ve harmonik olmayan (episodik, örn. deprem vs.) bilesen random noise A : k.istasyon, ve p.harmonige ait amplitude(genlik) kp f : k.istasyon, ve p.harmonige ait frekans kp φ : k.istasyon, ve p.harmonige ait faz kp Δr : kistasyonunun, i.ofset kestirimi i ki, t : i.kestirimin epogu Tanir, vd., 29
 p p p p p p k")
 Tanir, vd.")
38 k X = R cos( ω t+φ ) + Z t p p p t p= 1 cos( ωt+ Φ ) = cosωt cos Φ sinωt sin Φ ( a = R cos Φ, b = R sin Φ ) p p p p p p k X = ( a cosω t b sin ω t) + Z t p p p p t p= 1 ( ω = 2 π f ) p p R = a + b 2 2 p p p Φ = 1 p tan ( bp / ap) Tanir, vd., 29
39 by courtesy of Tobias Nilsson and Lucia Plank
40 by courtesy of Tobias Nilsson and Lucia Plank
41 KTU GEOD IVS ANALIZ MERKEZI ÖNGÖRÜLEN FAALIYETLERI 23 Mart 29, Fransa nin Bordo sehrinde alinan IVS yönetim kurulu karari ile kuruldu. Öngörülen katkilari: EVN agi oturumlarinin analizi, IVS-R1 ve -R4 oturumlarinin analizi, CONT oturumlarinin analizi, INT oturumlarinin analizi. Yazılım geliştirme calismalari. VLBI ve diğer uzay ve uydu jeodezik tekniklerden elde edilen parametrelerinin kestiriminde stokastik modellerin kullanımı. Uydu ve uzay jeodezik tekniklerin intra- ve inter-teknik kombinasyonu ile ilgili algoritmaların geliştirilmesi. Farklı VLBI Analiz Merkezleri tarafından elde edilen ürünlerin (istasyon koordinatları başta olmak üzere) üretilmesinde kullanılan parametre kestirim yöntemlerinin kıyaslanması, IERS in belirlediği konvansiyonlara uyumun saglanmasi.
42 Sonuclar IVS, başta IERS, ve IAU olmak üzere bir çok kurumsal yapıya, Yer ve uzay araştırmalarına ilişkin bilim dallarına veri sağlar. Nutasyonu ve Yer ortalama dönme ekseninin inersiyal tabanlı bir referans sistemine (quasi-inersiyal: ICRF) bağlı mutlak dönüklüğünü (dut1) doğrudan varsayımsız ölçebilen, CIP nin ICRF deki konumunu en duyarlı belirleyen ve ICRF in oluşturulmasında ölçüleri (oturumları) analiz edilen tek uzay tabanlı konum belirleme sistemidir. IVS, VLBI21 projesi kapsamında IAG in Küresel Jeodezik Gözlem Sistemi (Global Geodetic Observing System, GGOS) gerçekleştirme projesinin öngördüğü hedeflere ulaşmak amacı ile radyo teleskoplarından, analiz yazılımlarına kadar tüm alt yapısını güncellemektedir. Viyana Teknik Üniversitesi, Jeodezi ve Jeofizik Enstitüsü, IVS analiz merkezi bu bağlamda simülasyon ve yazılım geliştirme çalışmalarını başarı ile yürütmektedir. EVN ölçülerinin analizleri, intra- ve inter-teknik kombinasyonlar ve yazılım geliştirme çalışmalarına hizmet etmek üzere, KTU, Harita Mühendisligi Bölümü bünyesinde yeni bir analiz merkezi kurulmasi önerisi, IVS Yönetim Kurulunun 23 Mart 29 tarihinde Fransa nın Bordo şehrindeki toplantısında oy birliği ile kabul edilmiştir. Bu bağlamda yapılacak olan çalişmalar yeni oluşturulacak IERS ürünlerine (ICRF, ITRF, EOP vd.) doğrudan katkı sağlayacaktır.
43 Önemli Kaynaklar: Dinlediginiz icin tesekkür ederiz. - McCarthy, D.D., ve Petit, G., (24). IERS Conventions 23, Observatoire de Paris. - Boehm, J., Spicakova, H., Plank, L., Teke, K., Pany, A., Wresnik, J., Englich, S., Schuh, H., Hobiger, T., Ichikawa, R., Koyama, Y., Gotoh, T., Otsubo, T. ve Kubooka, T., (29), Plans for the Vienna VLBI Software VieVS, 19th European VLBI for Geodesy and Astrometry Working Meeting, 1th IVS Analysis Workshop, March 29, Bordeaux, France. - Boehm, J., Werl, B. ve Schuh, H., (26). Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data, J. Geophys. Res., 111, B246, doi:1.129/25jb Schuh, H., Böhm, J., Englich, S., Heinkelmann, R., Mendes Cerveira, P.J., Pany, A., Plank, L., Spicakova, H., Teke, K. ve Wresnik, J., (29). Vienna IGG Special Analysis Center Annual Report 28, IVS 28 Annual Report, D. Behrend and K.D. Baver (eds.), NASA/TP. - K. Teke, J. Boehm, H. Spicakova, A. Pany, L. Plank, E. Tanir, H. Schuh, (29), Piecewise Linear Offsets for VLBI Parameter Estimation, 19th European VLBI for Geodesy and Astrometry Working Meeting, 1th IVS Analysis Workshop, March 29, Bordeaux, France. - Rothacher, M., (22a). Combination of space-geodetic techniques, IVS 22 General Meeting Proceedings, Tanır, E., (28). A Study About Optimal Intra-Technique Combination of VLBI Analysis Center Solutions, PhD Thesis, Technischen Universität Wien, Institut für Geodäsie und Geophysik, Vienna, Austria. -Sovers, O.J., Fanselow J.L. ve Jacobs, C.S., (1998). Astrometry and geodesy with radio interferometry: experiments, models, results. Reviews of Modern Physics, 7, No Ray, R., (1999). A global ocean tide model from TOPEX/Poseidon altimetry/got99.2 NASA/TM pp. 58. Goddard Flight Center/NASA, Greenbelt, MD Ma, C., Arias, E.F. ve Eubanks, T.M., Fey A.L., Gontier A-M., Jacobs C.S., Sover O. J., Archinal, B. A., Charlot, P., (1998). The international celestial reference frame as realised by very long baseline interferometry. Astron J., Altamimi, Z., (26). Reference Systems: Definition and Realization, AFREF Technical Workshop, University of Cape Town, July 9-13, Scherneck, H. G., (1991). A parametrized solid earth tide model and ocean tide loading effects for global geodetic baseline measurements. Geophys. J. Int., 16. pp Petrov, L. ve Boy, J. P., (24). Study of the atmospheric pressure loading signal in VLBI observations. J. Geophys. Res., Vol. 19, No. B Bu calismada kullanilan ham verileri saglayan IVS e tesekkür ederiz.
IVS-CONT08 OTURUMLARINDAKİ VLBI ve GNSS ÖLÇÜLERİNİN ANALİZLERİNDEN KESTİRİMİ YAPILAN YER DÖNÜKLÜK PARAMETRELERİNİN KARŞILAŞTIRILMASI
 IVS-CONT08 OTURUMLARINDAKİ VLBI ve GNSS ÖLÇÜLERİNİN ANALİZLERİNDEN KESTİRİMİ YAPILAN YER DÖNÜKLÜK PARAMETRELERİNİN KARŞILAŞTIRILMASI Kamil Teke 1, 2, Emine Tanır 3, Harald Schuh 1 1 Vienna University of
IVS-CONT08 OTURUMLARINDAKİ VLBI ve GNSS ÖLÇÜLERİNİN ANALİZLERİNDEN KESTİRİMİ YAPILAN YER DÖNÜKLÜK PARAMETRELERİNİN KARŞILAŞTIRILMASI Kamil Teke 1, 2, Emine Tanır 3, Harald Schuh 1 1 Vienna University of
VLBI Uygulamaları. Kamil Teke
 VLBI Uygulamaları Kamil Teke Hacettepe Üniversitesi, Mühendislik Fakültesi, Jeodezi ve Fotogrametri Mühendisliği Bölümü, Ankara, kteke@hacettepe.edu.tr Sunum kapsamı Uzay jeodezisi tekniği, VLBI (Very
VLBI Uygulamaları Kamil Teke Hacettepe Üniversitesi, Mühendislik Fakültesi, Jeodezi ve Fotogrametri Mühendisliği Bölümü, Ankara, kteke@hacettepe.edu.tr Sunum kapsamı Uzay jeodezisi tekniği, VLBI (Very
Avrupada Düşey Yönde Oluşan Kabuk Hareketlerinin VLBI İle Belirlenmesi
 Avrupada Düşey Yönde Oluşan Kabuk Hareketlerinin VLBI İle Belirlenmesi Emine TANIR (1) Kamil TEKE (2,3) Harald SCHUH (2) (1) Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü, Trabzon (2) Technische
Avrupada Düşey Yönde Oluşan Kabuk Hareketlerinin VLBI İle Belirlenmesi Emine TANIR (1) Kamil TEKE (2,3) Harald SCHUH (2) (1) Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü, Trabzon (2) Technische
IVS-CONT08 Oturumları Boyunca Farklı Tekniklerden Elde Edilen Troposfer Zenit Sinyal Gecikmelerinin ve Gradyanların Karşılaştırılması
 IVS-CONT08 Oturumları Boyunca Farklı Tekniklerden Elde Edilen Troposfer Zenit Sinyal Gecikmelerinin ve Gradyanların Karşılaştırılması Kamil Teke(1), Johannes Böhm(2), Tobias Nilsson(2), Harald Schuh(2),
IVS-CONT08 Oturumları Boyunca Farklı Tekniklerden Elde Edilen Troposfer Zenit Sinyal Gecikmelerinin ve Gradyanların Karşılaştırılması Kamil Teke(1), Johannes Böhm(2), Tobias Nilsson(2), Harald Schuh(2),
IVS-CONT08 OTURUMLARINDAKİ VLBI ve GNSS ÖLÇÜLERİNİN ANALİZLERİNDEN KESTİRİMİ YAPILAN YER DÖNÜKLÜK PARAMETRELERİNİN KARŞILAŞTIRILMASI
 ABSTRACT TMMOB Harita ve Kadastro Mühendisleri Odası 13. Türkiye Harita Bilimsel ve Teknik Kurultayı 18-22 Nisan, Ankara IVS-CONT08 OTURUMLARINDAKİ VLBI ve GNSS ÖLÇÜLERİNİN ANALİZLERİNDEN KESTİRİMİ YAPILAN
ABSTRACT TMMOB Harita ve Kadastro Mühendisleri Odası 13. Türkiye Harita Bilimsel ve Teknik Kurultayı 18-22 Nisan, Ankara IVS-CONT08 OTURUMLARINDAKİ VLBI ve GNSS ÖLÇÜLERİNİN ANALİZLERİNDEN KESTİRİMİ YAPILAN
GNSS ve VLBI parametrelerinin inter-teknik kombinasyonu
 GNSS ve VLBI parametrelerinin inter-teknik kombinasyonu Kamil Teke 1, Emine Tanır Kayıkçı 2 1 Hacettepe Üniversitesi, Mühendislik Fakültesi, Jeodezi ve Fotogrametri Mühendisliği Bölümü, Ankara, kteke@hacettepe.edu.tr
GNSS ve VLBI parametrelerinin inter-teknik kombinasyonu Kamil Teke 1, Emine Tanır Kayıkçı 2 1 Hacettepe Üniversitesi, Mühendislik Fakültesi, Jeodezi ve Fotogrametri Mühendisliği Bölümü, Ankara, kteke@hacettepe.edu.tr
TÜRKİYE DE JEODEZİK VLBI ÇALIŞMALARI
 TÜRKİYE DE JEODEZİK VLBI ÇALIŞMALARI Emine Tanır Kayıkçı 1, Kamil Teke 2, Orhan Kurt 3, Özge Karaaslan 4, Mehmet Fikret Öcal 2, Ahmet Yavuzdoğan 4, Mualla Yalçınkaya 1 1 Karadeniz Teknik Üniversitesi,
TÜRKİYE DE JEODEZİK VLBI ÇALIŞMALARI Emine Tanır Kayıkçı 1, Kamil Teke 2, Orhan Kurt 3, Özge Karaaslan 4, Mehmet Fikret Öcal 2, Ahmet Yavuzdoğan 4, Mualla Yalçınkaya 1 1 Karadeniz Teknik Üniversitesi,
AVRUPADA DÜŞEY YÖNDE OLUŞAN KABUK HAREKETLERİNİN VLBI İLE BELİRLENMESİ
 AVRUPADA DÜŞEY YÖNDE OLUŞAN KABUK HAREKETLERİNİN VLBI İLE BELİRLENMESİ E.TANIR 1, K. TEKE 2,3, H.SCHUH 3 1 Karadeniz Teknik Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü, Jeodezi Anabilim
AVRUPADA DÜŞEY YÖNDE OLUŞAN KABUK HAREKETLERİNİN VLBI İLE BELİRLENMESİ E.TANIR 1, K. TEKE 2,3, H.SCHUH 3 1 Karadeniz Teknik Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü, Jeodezi Anabilim
JEODEZİ. Şekil1: Yerin şekli YERİN ŞEKLİ JEOİD
 JEODEZİ Jeodezi, üç boyutlu ve zaman değişkenli uzayda, çekim alanı ile birlikte, yeryuvarının ve öteki gök cisimlerinin ölçülmesi ve haritaya aktarılması ile uğraşan bilim dalıdır. Şekil1: Yerin şekli
JEODEZİ Jeodezi, üç boyutlu ve zaman değişkenli uzayda, çekim alanı ile birlikte, yeryuvarının ve öteki gök cisimlerinin ölçülmesi ve haritaya aktarılması ile uğraşan bilim dalıdır. Şekil1: Yerin şekli
Sistemin Bileşenleri
 International Terrestrial Reference System (ITRS) International Terrestrial Reference Frame (ITRF) Sistemin Bileşenleri International Terrestrial Reference System International Terrestrial Reference Frame
International Terrestrial Reference System (ITRS) International Terrestrial Reference Frame (ITRF) Sistemin Bileşenleri International Terrestrial Reference System International Terrestrial Reference Frame
Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi
 Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi Afyon Kocatepe University Journal of Science and Engineering AKÜ FEMÜBİD 17 (2017) 035502 (1004-1018) AKU J. Sci. Eng. 17 (2017) 035502
Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi Afyon Kocatepe University Journal of Science and Engineering AKÜ FEMÜBİD 17 (2017) 035502 (1004-1018) AKU J. Sci. Eng. 17 (2017) 035502
RADYOSONDA VE GNSS İLE ELDE EDİLEN YOĞUŞABİLİR SU BUHARI MİKTARLARININ KARŞILAŞTIRILMASI
 RADYOSONDA VE GNSS İLE ELDE EDİLEN YOĞUŞABİLİR SU BUHARI MİKTARLARININ KARŞILAŞTIRILMASI G. GÜRBÜZ 1, Ç. MEKİK 1, İ. DENİZ 1, S. ROZSA 2 1 Bülent Ecevit Üniversitesi, Mühendislik Fakültesi, Geomatik Mühendisliği
RADYOSONDA VE GNSS İLE ELDE EDİLEN YOĞUŞABİLİR SU BUHARI MİKTARLARININ KARŞILAŞTIRILMASI G. GÜRBÜZ 1, Ç. MEKİK 1, İ. DENİZ 1, S. ROZSA 2 1 Bülent Ecevit Üniversitesi, Mühendislik Fakültesi, Geomatik Mühendisliği
VLBI Ölçümlerinden elde edilen VieVS ve Solve UT1 Sonuçlarının Karşılaştırılması
 UCTEA Chamber of Surveying and Cadastre Engineers Journal of Geodesy and Geoinformation TMMOB Harita ve Kadastro Mühendisleri Odası Jeodezi ve Jeoinformasyon Dergisi Cilt 3 Sayı 1 ss.41-48 Kasım 2016 Dergi
UCTEA Chamber of Surveying and Cadastre Engineers Journal of Geodesy and Geoinformation TMMOB Harita ve Kadastro Mühendisleri Odası Jeodezi ve Jeoinformasyon Dergisi Cilt 3 Sayı 1 ss.41-48 Kasım 2016 Dergi
GPS METEOROLOJİSİ : İSTANBUL İÇİN BİR UYGULAMA GPS METEOROLOGY : AN APPLICATION FOR ISTANBUL
 GPS METEOROLOJİSİ : İSTANBUL İÇİN BİR UYGULAMA Ö.GÖKDAŞ 1 1 İstanbul Teknik Üniversitesi, Geomatik Anabilim Dalı, Doktora Öğrencisi, ogokdas@iski.gov.tr Özet Hava tahmini çalışmaları ve iklim araştırmalarında,
GPS METEOROLOJİSİ : İSTANBUL İÇİN BİR UYGULAMA Ö.GÖKDAŞ 1 1 İstanbul Teknik Üniversitesi, Geomatik Anabilim Dalı, Doktora Öğrencisi, ogokdas@iski.gov.tr Özet Hava tahmini çalışmaları ve iklim araştırmalarında,
TUSAGA-Aktif in GNSS Meteorolojisi Ağı Olarak Kullanılması
 TMMOB Harita ve Kadastro Mühendisleri Odası, 16. Türkiye Harita Bilimsel ve Teknik Kurultayı, 3-6 Mayıs 2017, Ankara. TUSAGA-Aktif in GNSS Meteorolojisi Ağı Olarak Kullanılması İlke Deniz 1,*, Çetin Mekik
TMMOB Harita ve Kadastro Mühendisleri Odası, 16. Türkiye Harita Bilimsel ve Teknik Kurultayı, 3-6 Mayıs 2017, Ankara. TUSAGA-Aktif in GNSS Meteorolojisi Ağı Olarak Kullanılması İlke Deniz 1,*, Çetin Mekik
JEODEZİK ÖLÇMELER DERSİ. Yrd. Doç. Dr. Hakan AKÇIN Yrd. Doç. Dr. Hüseyin KEMALDERE
 JEODEZİK ÖLÇMELER DERSİ Yrd. Doç. Dr. Hakan AKÇIN Yrd. Doç. Dr. Hüseyin KEMALDERE REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM 1. Hafta Ders Notları REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM Referans (Koordinat)
JEODEZİK ÖLÇMELER DERSİ Yrd. Doç. Dr. Hakan AKÇIN Yrd. Doç. Dr. Hüseyin KEMALDERE REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM 1. Hafta Ders Notları REFERANS (KOORDİNAT) SİSTEMLERİ VE DATUM Referans (Koordinat)
Astronomik Zaman Sistemleri
 Astronomik Zaman Sistemleri Astronomik Zaman Sistemleri İki türlüdür Dünyanın kendi etrafında dönüşüne bağlı olarak tanımlanan zamanlar Atom saatleri ile (yani atomik salınımlarınfrekansı) ile yürütülen
Astronomik Zaman Sistemleri Astronomik Zaman Sistemleri İki türlüdür Dünyanın kendi etrafında dönüşüne bağlı olarak tanımlanan zamanlar Atom saatleri ile (yani atomik salınımlarınfrekansı) ile yürütülen
ARAZİ ÖLÇMELERİ. İki Boyutlu Koordinat sistemleri Arası Dönüşüm
 İki Boyutlu Koordinat sistemleri Arası Dönüşüm Amaç, bir koordinat sistemine göre elde edilmiş olan koordinatların, diğer bir koordinat sistemindeki koordinat değerlerini elde etmektir. İki haritanın koordinat
İki Boyutlu Koordinat sistemleri Arası Dönüşüm Amaç, bir koordinat sistemine göre elde edilmiş olan koordinatların, diğer bir koordinat sistemindeki koordinat değerlerini elde etmektir. İki haritanın koordinat
Kamil TEKE 1, 2, Johannes BOEHM 1, Emine TANIR 3, Harald SCHUH 1. Harita Dergisi Temmuz 2009 Sayı 142
 Çok Uzun Baz Enterferometrisi (VLBI) Tekniğinde, Saat Hatası ve Troposferik Geikme Parametre Kestirim Modelleri (Clok Error and Tropospheri Delay Parameter Estimation Models of the Very Long Baseline Interferometry
Çok Uzun Baz Enterferometrisi (VLBI) Tekniğinde, Saat Hatası ve Troposferik Geikme Parametre Kestirim Modelleri (Clok Error and Tropospheri Delay Parameter Estimation Models of the Very Long Baseline Interferometry
Jeodezide Koordinat Sistemleri Ders Kodu:
 Jeodezide Koordinat Sistemleri Ders Kodu: 0010070029 (4. Yarıyıl) Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya 06.09.2013 1 1 Giriş Bu bölümde; koordinat
Jeodezide Koordinat Sistemleri Ders Kodu: 0010070029 (4. Yarıyıl) Yrd. Doç. Dr. Serkan DOĞANALP Necmettin Erbakan Üniversitesi Harita Mühendisliği Bölümü Konya 06.09.2013 1 1 Giriş Bu bölümde; koordinat
Çok Uzun Baz Enterferometrisi (VLBI) ölçülerinin modellenmesi **
 ölçülerinin modellenmesi **") UCTEA Chamber of Surveying and Cadastre Engineers Journal of Geodesy and Geoinformation TMMOB Harita ve Kadastro Mühendisleri Odası Jeodezi ve Jeoinformasyon Dergisi Cilt 1 Sayı 1 ss. 65-74 Mayıs 212 www.hkmodergi.org
UCTEA Chamber of Surveying and Cadastre Engineers Journal of Geodesy and Geoinformation TMMOB Harita ve Kadastro Mühendisleri Odası Jeodezi ve Jeoinformasyon Dergisi Cilt 1 Sayı 1 ss. 65-74 Mayıs 212 www.hkmodergi.org
 hkm Jeodezi, Jeoinformasyon ve Arazi Yönetimi Dergisi 2005/2 Sayý 93 www.hkmo.org.tr Klasik Yöntemlerle Üretilmiþ Kontrol Noktalarýnýn (Poligon Noktalarýnýn) GPS Koordinatlarý ile Karþýlaþtýrýlmasýna Ýliþkin
hkm Jeodezi, Jeoinformasyon ve Arazi Yönetimi Dergisi 2005/2 Sayý 93 www.hkmo.org.tr Klasik Yöntemlerle Üretilmiþ Kontrol Noktalarýnýn (Poligon Noktalarýnýn) GPS Koordinatlarý ile Karþýlaþtýrýlmasýna Ýliþkin
G( q ) yer çekimi matrisi;
 yer çekimi matrisi;") RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
RPR (DÖNEL PRİZATİK DÖNEL) EKLE YAPISINA SAHİP BİR ROBOTUN DİNAİK DENKLELERİNİN VEKTÖR-ATRİS FORDA TÜRETİLESİ Aytaç ALTAN Osmancık Ömer Derindere eslek Yüksekokulu Hitit Üniversitesi aytacaltan@hitit.edu.tr
Turgut UZEL, Kamil EREN TÜBİTAK KAMU KURUMLARI ARAŞTIRMA ve GELİŞTİRME PROJELERİNİ DESTEKLEME PROGRAMI
 Bir Öncü!! Bir İlk!! CORS-TR Projesi Turgut UZEL, Kamil EREN 1 1007 TÜBİTAK KAMU KURUMLARI ARAŞTIRMA ve GELİŞTİRME PROJELERİNİ DESTEKLEME PROGRAMI ULUSAL CORS (Sürekli İşleyen GPS İstasyonları) SİSTEMİNİN
Bir Öncü!! Bir İlk!! CORS-TR Projesi Turgut UZEL, Kamil EREN 1 1007 TÜBİTAK KAMU KURUMLARI ARAŞTIRMA ve GELİŞTİRME PROJELERİNİ DESTEKLEME PROGRAMI ULUSAL CORS (Sürekli İşleyen GPS İstasyonları) SİSTEMİNİN
COMPARISON OF TROPOSPHERE PATH DELAYS WITH PPP BY USING DIFFERENT ATMOSPHERE MODELS
 HASSAS KONUM BELİRLEMEDE (PPP) FARKLI ATMOSFER MODELLERİ KULLANARAK TROPOSFER KAYNAKLI GECİKMELERİN KARŞILAŞTIRILMASI E. TUNALI 1 1 Hacettepe Üniversitesi, Mühendislik Fakültesi, Geomatik Mühendisliği
HASSAS KONUM BELİRLEMEDE (PPP) FARKLI ATMOSFER MODELLERİ KULLANARAK TROPOSFER KAYNAKLI GECİKMELERİN KARŞILAŞTIRILMASI E. TUNALI 1 1 Hacettepe Üniversitesi, Mühendislik Fakültesi, Geomatik Mühendisliği
B = 2 f ρ. a 2. x A' σ =
 TÜRKİYE ULUSAL JEODEZİ KOMİSYONU (TUJK) 004 YILI BİLİMSEL TOPLANTISI MÜHENDİSLİK ÖLÇMELERİNDE JEODEZİK AĞLAR ÇALIŞTAYI JEODEZİK GPS AĞLARININ TASARIMINDA BİLGİSAYAR DESTEKLİ SİMÜLASYON YÖNTEMİNİN KULLANIMI
TÜRKİYE ULUSAL JEODEZİ KOMİSYONU (TUJK) 004 YILI BİLİMSEL TOPLANTISI MÜHENDİSLİK ÖLÇMELERİNDE JEODEZİK AĞLAR ÇALIŞTAYI JEODEZİK GPS AĞLARININ TASARIMINDA BİLGİSAYAR DESTEKLİ SİMÜLASYON YÖNTEMİNİN KULLANIMI
SABİT İSTASYON VERİLERİNİN ANALİZİ
 TMMOB Harita ve Kadastro Mühendisleri Odası 13. Türkiye Harita Bilimsel ve Teknik Kurultayı 18 22 Nisan 2011, Ankara SABİT İSTASYON VERİLERİNİN ANALİZİ Soner Özdemir 1, Ayhan Cingöz 1, Bahadır Aktuğ 1,
TMMOB Harita ve Kadastro Mühendisleri Odası 13. Türkiye Harita Bilimsel ve Teknik Kurultayı 18 22 Nisan 2011, Ankara SABİT İSTASYON VERİLERİNİN ANALİZİ Soner Özdemir 1, Ayhan Cingöz 1, Bahadır Aktuğ 1,
Dünyanın dönmesi: Yer sabit -> gök sistemleri arasındaki dönüşüm r gök = Qr yer-sabit Neden dünyanın dönmesi ile ilgileniyoruz?
 Dünyanın Dönmesi Dünyanın dönmesi: Yer sabit -> gök sistemleri arasındaki dönüşüm r gök = Qr yer-sabit Neden dünyanın dönmesi ile ilgileniyoruz? yer sistemi ve gök sistemini ilişkilendirmek istiyoruz quasarlar
Dünyanın Dönmesi Dünyanın dönmesi: Yer sabit -> gök sistemleri arasındaki dönüşüm r gök = Qr yer-sabit Neden dünyanın dönmesi ile ilgileniyoruz? yer sistemi ve gök sistemini ilişkilendirmek istiyoruz quasarlar
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Ağırlıkları Eşit Dolaysız (Direkt) Ölçüler Dengelemesi Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü
DENGELEME HESABI-I DERS NOTLARI Ağırlıkları Eşit Dolaysız (Direkt) Ölçüler Dengelemesi Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü
MAGNET (MARMARA SÜREKLİ GPS AĞI) İSTASYONLARININ DÖNEMSEL ETKİLER AÇISINDAN KAMPANYA GPS ÖLÇMELERİNE
 İSTASYONLARININ DÖNEMSEL ETKİLER AÇISINDAN KAMPANYA GPS ÖLÇMELERİNE") TMMOB Harita ve Kadastro Mühendisleri Odası 12. Türkiye Harita Bilimsel ve Teknik Kurultayı 11 15 Mayıs 2009, Ankara MAGNET (MARMARA SÜREKLİ GPS AĞI) İSTASYONLARININ DÖNEMSEL ETKİLER AÇISINDAN KAMPANYA
TMMOB Harita ve Kadastro Mühendisleri Odası 12. Türkiye Harita Bilimsel ve Teknik Kurultayı 11 15 Mayıs 2009, Ankara MAGNET (MARMARA SÜREKLİ GPS AĞI) İSTASYONLARININ DÖNEMSEL ETKİLER AÇISINDAN KAMPANYA
Radyosonda ve GPS Verileri ile Elde Edilen Yoğuşabilir Su Buharı Değerlerinin Karşılaştırılması
 Harita Teknolojileri Elektronik Dergisi Cilt: 6, No: 3, 2014 (32-39) Electronic Journal of Map Technologies Vol: 6, No: 3, 2014 (32-39) TEKNOLOJİK ARAŞTIRMALAR www.teknolojikarastirmalar.com e-issn: 1309-3983
Harita Teknolojileri Elektronik Dergisi Cilt: 6, No: 3, 2014 (32-39) Electronic Journal of Map Technologies Vol: 6, No: 3, 2014 (32-39) TEKNOLOJİK ARAŞTIRMALAR www.teknolojikarastirmalar.com e-issn: 1309-3983
GNSS İSTASYONLARI LİNEER HAREKETLERİNİN ZAMAN SERİLERİ ANALİZİ İLE BELİRLENMESİ
 GNSS İSTASYONLARI LİNEER HAREKETLERİNİN ZAMAN SERİLERİ ANALİZİ İLE BELİRLENMESİ O. OKTAR 1, H. ERDOĞAN 1 1 Aksaray Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü, Aksaray, osmanoktar@aksaray.edu.tr,
GNSS İSTASYONLARI LİNEER HAREKETLERİNİN ZAMAN SERİLERİ ANALİZİ İLE BELİRLENMESİ O. OKTAR 1, H. ERDOĞAN 1 1 Aksaray Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü, Aksaray, osmanoktar@aksaray.edu.tr,
GNSS GÖZLEM SÜRELERİNİN BAZ ÇÖZÜMLERİ VE KONUM DOĞRULUĞUNA OLAN ETKİSİNİN ARAŞTIRILMASI: AKSARAY KAMPÜS GNSS AĞI ÖRNEĞİ
 GNSS GÖZLEM SÜRELERİNİN BAZ ÇÖZÜMLERİ VE KONUM DOĞRULUĞUNA OLAN ETKİSİNİN ARAŞTIRILMASI: AKSARAY KAMPÜS GNSS AĞI ÖRNEĞİ C. GEZGİN 1, M. ACAR 2 1 Aksaray Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği
GNSS GÖZLEM SÜRELERİNİN BAZ ÇÖZÜMLERİ VE KONUM DOĞRULUĞUNA OLAN ETKİSİNİN ARAŞTIRILMASI: AKSARAY KAMPÜS GNSS AĞI ÖRNEĞİ C. GEZGİN 1, M. ACAR 2 1 Aksaray Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği
GNSS ile Elipsoit Yükseklik Tayini ve Katı Yer Gelgit Modellerinin Belirlenen Elipsoit Yüksekliklerine Etkisi
 GNSS ile Elipsoit Yükseklik Tayini ve Katı Yer Gelgit Modellerinin Belirlenen Elipsoit Yüksekliklerine Etkisi ÖZET Soner ÖZDEMİR, Mustafa KURT, Bahadır AKTUĞ Harita Genel Komutanlığı, Ankara Harita Genel
GNSS ile Elipsoit Yükseklik Tayini ve Katı Yer Gelgit Modellerinin Belirlenen Elipsoit Yüksekliklerine Etkisi ÖZET Soner ÖZDEMİR, Mustafa KURT, Bahadır AKTUĞ Harita Genel Komutanlığı, Ankara Harita Genel
UYDU JEODEZISI: ÖLÇME YÖNTEM VE TEKNIKLERI
 UYDU JEODEZISI: ÖLÇME YÖNTEM VE TEKNIKLERI Gözlem noktasına baglı yöntemler: Yerden uyduya Uydudan yer noktasına Uydudan uyduya Ölçünün cinsine baglı yöntemler: Dogrultu ölçmeleri (geometrik yöntem) Çift
UYDU JEODEZISI: ÖLÇME YÖNTEM VE TEKNIKLERI Gözlem noktasına baglı yöntemler: Yerden uyduya Uydudan yer noktasına Uydudan uyduya Ölçünün cinsine baglı yöntemler: Dogrultu ölçmeleri (geometrik yöntem) Çift
GLOBAL KONUM BELÝRLEME SÝSTEMÝ (GPS)
") PAMUKKALE ÜNÝVERSÝTESÝ MÜHENDÝSLÝK YIL FAKÜLTESÝ PAMUKKALE UNIVERSITY ENGINEERING CÝLT COLLEGE MÜHENDÝSLÝK BÝLÝMLERÝ SAYI DERGÝSÝ JOURNAL OF ENGINEERING SAYFA SCIENCES : 1996 : 2 : 2 : 103-108 GLOBAL KONUM
PAMUKKALE ÜNÝVERSÝTESÝ MÜHENDÝSLÝK YIL FAKÜLTESÝ PAMUKKALE UNIVERSITY ENGINEERING CÝLT COLLEGE MÜHENDÝSLÝK BÝLÝMLERÝ SAYI DERGÝSÝ JOURNAL OF ENGINEERING SAYFA SCIENCES : 1996 : 2 : 2 : 103-108 GLOBAL KONUM
Rastgele Süreçler. Rastgele süreç konsepti (Ensemble) Örnek Fonksiyonlar. deney. Zaman (sürekli veya kesikli) Ensemble.
 Örnek Fonksiyonlar. deney. Zaman (sürekli veya kesikli) Ensemble.") 1 Rastgele Süreçler Olasılık taması Rastgele Deney Çıktı Örnek Uzay, S (s) Zamanın Fonksiy onu (t, s) Olayları Tanımla Rastgele süreç konsepti (Ensemble) deney (t,s 1 ) 1 t Örnek Fonksiyonlar (t,s ) t
1 Rastgele Süreçler Olasılık taması Rastgele Deney Çıktı Örnek Uzay, S (s) Zamanın Fonksiy onu (t, s) Olayları Tanımla Rastgele süreç konsepti (Ensemble) deney (t,s 1 ) 1 t Örnek Fonksiyonlar (t,s ) t
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ (Ölçüler Yöntemleri) Prof. Dr. Mualla YALÇINKAYA
 Prof. Dr. Mualla YALÇINKAYA") JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ (Ölçüler Yöntemleri) Prof. Dr. Mualla YALÇINKAYA ÖLÇÜ TEKNİKLERİ I- Uydu ve Uzay Teknikleri VLBI SLR GPS DORIS INSAR Gravite Uydu Sistemleri (Uydu ve Uzay Teknikleri)
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ (Ölçüler Yöntemleri) Prof. Dr. Mualla YALÇINKAYA ÖLÇÜ TEKNİKLERİ I- Uydu ve Uzay Teknikleri VLBI SLR GPS DORIS INSAR Gravite Uydu Sistemleri (Uydu ve Uzay Teknikleri)
DETERMINATION OF VELOCITY FIELD AND STRAIN ACCUMULATION OF DENSIFICATION NETWORK IN MARMARA REGION
 DETERMINATION OF VELOCITY FIELD AND STRAIN ACCUMULATION OF DENSIFICATION NETWORK IN MARMARA REGION by İlke Deniz B.S. Geodesy and Photogrametry Engineering, in Yıldız Technical University, 2004 Submitted
DETERMINATION OF VELOCITY FIELD AND STRAIN ACCUMULATION OF DENSIFICATION NETWORK IN MARMARA REGION by İlke Deniz B.S. Geodesy and Photogrametry Engineering, in Yıldız Technical University, 2004 Submitted
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
TUSAGA-AKTİF istasyonları koordinat ve koordinat değişimlerinin yılları GNSS verilerinden yararla belirlenmesi ve uygulamada kullanılması
 TÜRKİYE ULUSAL JEODEZİ KOMİSYONU 2017 YILI BİLİMSEL TOPLANTISI SABİT GNSS İSTASYONLARI UYGULAMALARI TUSAGA-AKTİF istasyonları koordinat ve koordinat değişimlerinin 2009-2017 yılları GNSS verilerinden yararla
TÜRKİYE ULUSAL JEODEZİ KOMİSYONU 2017 YILI BİLİMSEL TOPLANTISI SABİT GNSS İSTASYONLARI UYGULAMALARI TUSAGA-AKTİF istasyonları koordinat ve koordinat değişimlerinin 2009-2017 yılları GNSS verilerinden yararla
OFFSET ANTENNA OFSET ANTEN 65 cm. (60x66) ACCESSORIES - AKSESUARLAR
 ACCESSORIES - AKSESUARLAR") OFFSET ANTENNA OFSET ANTEN 65 cm. (60x66) GES 65 OF GES 65-3 OF AE 621 AE 456 AE 6065 P AE 890 AE 668 GW 3250 S GW 3850 S KW 6080 65 0F SPECIFICATION - TEKNİK ÖZELLİKLER 65-3 0F 60 cm Reception Frequency
OFFSET ANTENNA OFSET ANTEN 65 cm. (60x66) GES 65 OF GES 65-3 OF AE 621 AE 456 AE 6065 P AE 890 AE 668 GW 3250 S GW 3850 S KW 6080 65 0F SPECIFICATION - TEKNİK ÖZELLİKLER 65-3 0F 60 cm Reception Frequency
ACCURACY OF GPS PRECISE POINT POSITIONING (PPP)
") i by Simge TEKİÇ B.S., Geodesy and Photogrammetry Engineering Yıldız Technical University, 2006 Submitted to the Kandilli Observatory and Earthquake Research Institute in partial fulfillment of the requirements
i by Simge TEKİÇ B.S., Geodesy and Photogrammetry Engineering Yıldız Technical University, 2006 Submitted to the Kandilli Observatory and Earthquake Research Institute in partial fulfillment of the requirements
A UNIFIED APPROACH IN GPS ACCURACY DETERMINATION STUDIES
 A UNIFIED APPROACH IN GPS ACCURACY DETERMINATION STUDIES by Didem Öztürk B.S., Geodesy and Photogrammetry Department Yildiz Technical University, 2005 Submitted to the Kandilli Observatory and Earthquake
A UNIFIED APPROACH IN GPS ACCURACY DETERMINATION STUDIES by Didem Öztürk B.S., Geodesy and Photogrammetry Department Yildiz Technical University, 2005 Submitted to the Kandilli Observatory and Earthquake
Uydu Jeodezisi. Lisans Ders Notları. Yrd. Doç. Dr. Aydın ÜSTÜN. Konya, 2010. Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi
 Uydu Jeodezisi Lisans Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi Harita Mühendisliği Bölümü Konya, 2010 A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.02.11.10)
Uydu Jeodezisi Lisans Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi Harita Mühendisliği Bölümü Konya, 2010 A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.02.11.10)
Harita Projeksiyonları
 Harita Projeksiyonları Bölüm Prof.Dr. İ. Öztuğ BİLDİRİCİ Amaç ve Kapsam Harita projeksiyonlarının amacı, yeryüzü için tanımlanmış bir referans yüzeyi üzerinde belli bir koordinat sistemine göre tanımlı
Harita Projeksiyonları Bölüm Prof.Dr. İ. Öztuğ BİLDİRİCİ Amaç ve Kapsam Harita projeksiyonlarının amacı, yeryüzü için tanımlanmış bir referans yüzeyi üzerinde belli bir koordinat sistemine göre tanımlı
HARİTA DAİRESİ BAŞKANLIĞI. İSTANBUL TKBM HİZMET İÇİ EĞİTİM Temel Jeodezi ve GNSS
 HİZMET İÇİ EĞİTİM MART 2015 İSTANBUL TAPU VE KADASTRO II.BÖLGE MÜDÜRLÜĞÜ SUNUM PLANI 1- Jeodezi 2- Koordinat sistemleri 3- GNSS 3 JEODEZİ Jeodezi; Yeryuvarının şekil, boyut, ve gravite alanı ile zamana
HİZMET İÇİ EĞİTİM MART 2015 İSTANBUL TAPU VE KADASTRO II.BÖLGE MÜDÜRLÜĞÜ SUNUM PLANI 1- Jeodezi 2- Koordinat sistemleri 3- GNSS 3 JEODEZİ Jeodezi; Yeryuvarının şekil, boyut, ve gravite alanı ile zamana
HİPPARCOS KATALOĞUNDAKİ ALGOL YILDIZLARININ KİNEMATİĞİ. T. Özdemir *, A. İskender * * İnönü Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü
 HİPPARCOS KATALOĞUNDAKİ ALGOL YILDIZLARININ KİNEMATİĞİ T. Özdemir *, A. İskender * * İnönü Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Algol tipi sistemler (klasik algol) *Örten çift yıldız sistemi
HİPPARCOS KATALOĞUNDAKİ ALGOL YILDIZLARININ KİNEMATİĞİ T. Özdemir *, A. İskender * * İnönü Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Algol tipi sistemler (klasik algol) *Örten çift yıldız sistemi
ENİNE DEMET DİNAMİĞİ. Prof. Dr. Abbas Kenan Çiftçi. Ankara Üniversitesi
 ENİNE DEMET DİNAMİĞİ Prof. Dr. Abbas Kenan Çiftçi Ankara Üniversitesi 1 Dairesel Hızlandırıcılar Yönlendirme: mağnetik alan Odaklama: mağnetik alan Alan indisi zayıf odaklama: 0
ENİNE DEMET DİNAMİĞİ Prof. Dr. Abbas Kenan Çiftçi Ankara Üniversitesi 1 Dairesel Hızlandırıcılar Yönlendirme: mağnetik alan Odaklama: mağnetik alan Alan indisi zayıf odaklama: 0
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 22.2.219 Serbestlik derecesi Bir sistemin serbestlik
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 22.2.219 Serbestlik derecesi Bir sistemin serbestlik
TUSAGA-AKTİF CORS İSTASYONLARININ YER DEĞİŞİKLİĞİNİN AĞ BAZLI RTK ÖLÇÜMLERİNE ETKİSİ. Sermet Öğütcü, İbrahim Kalaycı Necmettin Erbakan Üniversitesi
 TUSAGA-AKTİF CORS İSTASYONLARININ YER DEĞİŞİKLİĞİNİN AĞ BAZLI RTK ÖLÇÜMLERİNE ETKİSİ Sermet Öğütcü, İbrahim Kalaycı Necmettin Erbakan Üniversitesi ÇALIŞMA BÖLGESİ ÖLÇÜMLER Konya Aksaray-Cihanbeyli-Yunak
TUSAGA-AKTİF CORS İSTASYONLARININ YER DEĞİŞİKLİĞİNİN AĞ BAZLI RTK ÖLÇÜMLERİNE ETKİSİ Sermet Öğütcü, İbrahim Kalaycı Necmettin Erbakan Üniversitesi ÇALIŞMA BÖLGESİ ÖLÇÜMLER Konya Aksaray-Cihanbeyli-Yunak
JEODEZİK GPS AĞLARINDA DUYARLIK ve
 I. ULUSAL MÜHENDİSLİK ÖLÇMELERİ SEMPOZYUMU JEODEZİK GPS AĞLARINDA DUYARLIK ve GÜVEN ANALİZİ Mualla YALÇINKAYA Kamil TEKE Temel BAYRAK mualla@ktu.edu.tr k_teke@ktu.edu.tr temelbayrak@hotmail.com ÇALIŞMANIN
I. ULUSAL MÜHENDİSLİK ÖLÇMELERİ SEMPOZYUMU JEODEZİK GPS AĞLARINDA DUYARLIK ve GÜVEN ANALİZİ Mualla YALÇINKAYA Kamil TEKE Temel BAYRAK mualla@ktu.edu.tr k_teke@ktu.edu.tr temelbayrak@hotmail.com ÇALIŞMANIN
MEVCUT GPS/NİVELMAN VERİ KÜMESİNİN JEOİT MODELLEME AÇISINDAN DEĞERLENDİRİLMESİ
 MEVCUT GPS/NİVELMAN VERİ KÜMESİNİN JEOİT MODELLEME AÇISINDAN DEĞERLENDİRİLMESİ Mustafa İNAM, Mehmet SİMAV, Ali TÜRKEZER, Serdar AKYOL, Ahmet DİRENÇ, A.İhsan KURT, Mustafa KURT Harita Genel Komutanlığı,
MEVCUT GPS/NİVELMAN VERİ KÜMESİNİN JEOİT MODELLEME AÇISINDAN DEĞERLENDİRİLMESİ Mustafa İNAM, Mehmet SİMAV, Ali TÜRKEZER, Serdar AKYOL, Ahmet DİRENÇ, A.İhsan KURT, Mustafa KURT Harita Genel Komutanlığı,
ITRF-2005 VE ÖNCEKİ REFERANS KOORDİNAT SİSTEMLERİ İLE OLAN İLİŞKİSİ (ITRF-2005 AND ITS RELATIONS BETWEEN PREVIOUS REFERENCE FRAMES)
") ITRF-2005 VE ÖNCEKİ REFERANS KOORDİNAT SİSTEMLERİ İLE OLAN İLİŞKİSİ (ITRF-2005 AND ITS RELATIONS BETWEEN PREVIOUS REFERENCE FRAMES) Bahadır AKTUĞ Harita Genel Komutanlığı, Ankara bahadir.aktug@hgk.mil.tr
ITRF-2005 VE ÖNCEKİ REFERANS KOORDİNAT SİSTEMLERİ İLE OLAN İLİŞKİSİ (ITRF-2005 AND ITS RELATIONS BETWEEN PREVIOUS REFERENCE FRAMES) Bahadır AKTUĞ Harita Genel Komutanlığı, Ankara bahadir.aktug@hgk.mil.tr
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
küresel astronominin konusu zaman ve uydu konumlama sistemleri (gps- glonass)
") küresel astronominin konusu zaman ve uydu konumlama sistemleri (gps- glonass) ÖZET Doç. Dr. Burhan C. IŞIK (YTÜ Öğretim Üyesi) Bu yazıda küresel astronominin konusu olan zaman için Dünya Zamanı UT, Astronomik
küresel astronominin konusu zaman ve uydu konumlama sistemleri (gps- glonass) ÖZET Doç. Dr. Burhan C. IŞIK (YTÜ Öğretim Üyesi) Bu yazıda küresel astronominin konusu olan zaman için Dünya Zamanı UT, Astronomik
Özet: Açısal momentumun türetimi. Açısal momentum değiştirme bağıntıları. Artırıcı ve Eksiltici İşlemciler Kuantum Fiziği Ders XXI
 Özet: Açısal momentumun türetimi Açısal momentum değiştirme bağıntıları Levi- Civita simgesi Genel olarak, L x, L y, L z, nin eşzamanlı özdurumları yoktur L 2 ve bir bileşeni (L z ) nin eşzamanlı özdurumlarıdır.
Özet: Açısal momentumun türetimi Açısal momentum değiştirme bağıntıları Levi- Civita simgesi Genel olarak, L x, L y, L z, nin eşzamanlı özdurumları yoktur L 2 ve bir bileşeni (L z ) nin eşzamanlı özdurumlarıdır.
Jeodezide Yaklaşım Yöntemleri: Enterpolasyon ve Kollokasyon
 Jeodezide Yöntemleri: ve Lisansüstü Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Fen Bilimleri Enstitüsü e-posta: austun@selcuk.edu.tr Konya, 2007 A. Üstün yöntemleri 1 / 28 Bir soruyu ya
Jeodezide Yöntemleri: ve Lisansüstü Ders Notları Yrd. Doç. Dr. Aydın ÜSTÜN Selçuk Üniversitesi Fen Bilimleri Enstitüsü e-posta: austun@selcuk.edu.tr Konya, 2007 A. Üstün yöntemleri 1 / 28 Bir soruyu ya
BEÜ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ
 BEÜ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT DÖNÜŞÜMÜ, DATUM TRANSFORMASYONU Prof.Dr.RASİM DENİZ MAYS 2014 ZONGULDAK KOORDİNAT DÖNÜŞÜMÜ,DATUM TRANSFORMASYONU 1-Genel Bilgiler Aynı datumdaki koordinatların
BEÜ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT DÖNÜŞÜMÜ, DATUM TRANSFORMASYONU Prof.Dr.RASİM DENİZ MAYS 2014 ZONGULDAK KOORDİNAT DÖNÜŞÜMÜ,DATUM TRANSFORMASYONU 1-Genel Bilgiler Aynı datumdaki koordinatların
YILDIZ TEKNİK ÜNİVERSİTESİ SABİT GNSS İSTASYONU (YLDZ), VERİLERİNİN ANALİZİ VE SUNUMU
, VERİLERİNİN ANALİZİ VE SUNUMU") YILDIZ TEKNİK ÜNİVERSİTESİ SABİT GNSS İSTASYONU (YLDZ), VERİLERİNİN ANALİZİ VE SUNUMU E. GÜLAL 1, B. AKPINAR 1, A.A.DİNDAR 2, N.O. AYKUT 1, İ. TİRYAKİOĞLU 3, H. ERDOĞAN 4 1 Yıldız Teknik Üniversitesi,
YILDIZ TEKNİK ÜNİVERSİTESİ SABİT GNSS İSTASYONU (YLDZ), VERİLERİNİN ANALİZİ VE SUNUMU E. GÜLAL 1, B. AKPINAR 1, A.A.DİNDAR 2, N.O. AYKUT 1, İ. TİRYAKİOĞLU 3, H. ERDOĞAN 4 1 Yıldız Teknik Üniversitesi,
Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi
 Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi Afyon Kocatepe University Journal of Science and Engineering AKÜ FEMÜBİD 18 (2018) 017101 (343--356) AKU J. Sci. Eng. 18 (2018) 017101 (343--356)
Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi Afyon Kocatepe University Journal of Science and Engineering AKÜ FEMÜBİD 18 (2018) 017101 (343--356) AKU J. Sci. Eng. 18 (2018) 017101 (343--356)
Jeodezi
 1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
1 Jeodezi 5 2 Jeodezik Eğri Elipsoid Üstünde Düşey Kesitler Elipsoid yüzünde P 1 noktasındaki normalle P 2 noktasından geçen düşey düzlem, P 2 deki yüzey normalini içermez ve aynı şekilde P 2 de yüzey
EMAT ÇALIŞMA SORULARI
 EMAT ÇALIŞMA SORULARI 1) A = 4. ı x 2. ı y ı z ve B = ı x + 4. ı y 4. ı z vektörlerinin dik olduğunu gösteriniz. İki vektörün skaler çarpımlarının sıfır olması gerekir. A. B = 4.1 + ( 2). 4 + ( 1). ( 4)
EMAT ÇALIŞMA SORULARI 1) A = 4. ı x 2. ı y ı z ve B = ı x + 4. ı y 4. ı z vektörlerinin dik olduğunu gösteriniz. İki vektörün skaler çarpımlarının sıfır olması gerekir. A. B = 4.1 + ( 2). 4 + ( 1). ( 4)
Yüksek-Frekanslı Yer Dönme Parametrelerinin IVS-CONT14 Kampanyasının Analizi ile Kestirimi ve IERS2010 Modeliile Karşılaştırılması
 Afyon Kocatee Üniversitesi Fen ve Mühendisli Bilimleri Dergisi Yüse-Freanslı Yer Dönme Parametrelerinin IVS-CONT14 oturumları ve IERS2010 Modeli Afyon Karşılaştırması Kocatee University Tee ve Journal
Afyon Kocatee Üniversitesi Fen ve Mühendisli Bilimleri Dergisi Yüse-Freanslı Yer Dönme Parametrelerinin IVS-CONT14 oturumları ve IERS2010 Modeli Afyon Karşılaştırması Kocatee University Tee ve Journal
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Ağırlık ve Ters Ağırlık (Kofaktör) Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 016 AĞIRLIK
DENGELEME HESABI-I DERS NOTLARI Ağırlık ve Ters Ağırlık (Kofaktör) Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 016 AĞIRLIK
DENGELEME HESABI-I DERS NOTLARI
 DENGELEME HESABI-I DERS NOTLARI Dengeleme Hesabı Adımları, En Küçük Kareler İlkesine Giriş, Korelasyon Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita
DENGELEME HESABI-I DERS NOTLARI Dengeleme Hesabı Adımları, En Küçük Kareler İlkesine Giriş, Korelasyon Prof. Dr. Mualla YALÇINKAYA Yrd. Doç. Dr. Emine TANIR KAYIKÇI Karadeniz Teknik Üniversitesi, Harita
Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi
 JEODEZİ 6 1 Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi Jeodezik gözlemler, hesaplamalarda kullanılmadan önce, referans elipsoidin yüzeyine indirgenir. Bu işlem, arazide yapılan gözlemler l jeoidin
JEODEZİ 6 1 Gözlemlerin Referans Elipsoid Yüzüne İndirgenmesi Jeodezik gözlemler, hesaplamalarda kullanılmadan önce, referans elipsoidin yüzeyine indirgenir. Bu işlem, arazide yapılan gözlemler l jeoidin
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yinelemeli ve Uyarlanır Ayrıt Saptayıcı Süzgeçleri
 Yinelemeli ve Uyarlanır Ayrıt Saptayıcı Süzgeçleri innur Kurt, Muhittin Gökmen İstanbul Teknik Üniversitesi ilgisayar Mühendisliği ölümü Maslak 8066, İstanbul {kurt,gokmen}@cs.itu.edu.tr Özetçe Görüntü
Yinelemeli ve Uyarlanır Ayrıt Saptayıcı Süzgeçleri innur Kurt, Muhittin Gökmen İstanbul Teknik Üniversitesi ilgisayar Mühendisliği ölümü Maslak 8066, İstanbul {kurt,gokmen}@cs.itu.edu.tr Özetçe Görüntü
SOFTWARE ENGINEERS EDUCATION SOFTWARE REQUIREMENTS/ INSPECTION RESEARCH FINANCIAL INFORMATION SYSTEMS DISASTER MANAGEMENT INFORMATION SYSTEMS
 SOFTWARE REQUIREMENTS/ INSPECTION SOFTWARE ENGINEERS EDUCATION RESEARCH FINANCIAL INFORMATION SYSTEMS DISASTER MANAGEMENT INFORMATION SYSTEMS SOFTWARE REQUIREMENTS/ INSPECTION Ö. Albayrak, J. C. Carver,
SOFTWARE REQUIREMENTS/ INSPECTION SOFTWARE ENGINEERS EDUCATION RESEARCH FINANCIAL INFORMATION SYSTEMS DISASTER MANAGEMENT INFORMATION SYSTEMS SOFTWARE REQUIREMENTS/ INSPECTION Ö. Albayrak, J. C. Carver,
COMPARING THE PERFORMANCE OF KINEMATIC PPP AND POST PROCESS KINEMATICS METHODS IN RURAL AND URBAN AREAS
 KİNEMATİK PPP VE POST PROCESS KİNEMATİK YÖNTEMLERİNİN KIRSAL VE MESKUN ALANLARDAKİ PERFORMANSLARININ KARŞILAŞTIRILMASI A. CEYLAN 1, C.Ö. YİGİT 2, S. ALÇAY 1, B. N. ÖZDEMİR 1 1 Selçuk Üniversitesi, Mühendsilik
KİNEMATİK PPP VE POST PROCESS KİNEMATİK YÖNTEMLERİNİN KIRSAL VE MESKUN ALANLARDAKİ PERFORMANSLARININ KARŞILAŞTIRILMASI A. CEYLAN 1, C.Ö. YİGİT 2, S. ALÇAY 1, B. N. ÖZDEMİR 1 1 Selçuk Üniversitesi, Mühendsilik
JEODEZİK VERİLERDEN STRAIN (GERİNİM) ELEMANLARININ BELİRLENMESİ ÜZERİNE BİR İNCELEME
 ELEMANLARININ BELİRLENMESİ ÜZERİNE BİR İNCELEME") TMMOB Harita ve Kadastro Mühendisleri Odası Türkiye Harita Bilimsel ve Teknik Kurultayı 5 Mayıs 009, Ankara JEODEZİK VERİLERDEN STRAIN (GERİNİM) ELEMANLARININ BELİRLENMESİ ÜZERİNE BİR İNCELEME FPoyraz,
TMMOB Harita ve Kadastro Mühendisleri Odası Türkiye Harita Bilimsel ve Teknik Kurultayı 5 Mayıs 009, Ankara JEODEZİK VERİLERDEN STRAIN (GERİNİM) ELEMANLARININ BELİRLENMESİ ÜZERİNE BİR İNCELEME FPoyraz,
BÜLENT ECEVİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT SİSTEMLERİ. Prof.Dr.Rasim Deniz
 BÜLENT ECEVİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT SİSTEMLERİ Prof.Dr.Rasim Deniz Zonguldak, 2014 YERSEL KOORDİNAT SİSTEMLERİ 1-Genel Yer üzerindeki konumların belirlenmesi
BÜLENT ECEVİT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ GEOMATİK MÜHENDİSLİĞİ BÖLÜMÜ KOORDİNAT SİSTEMLERİ Prof.Dr.Rasim Deniz Zonguldak, 2014 YERSEL KOORDİNAT SİSTEMLERİ 1-Genel Yer üzerindeki konumların belirlenmesi
Elipsoid Yüzünde Jeodezik Dik Koordinatlar (Soldner Koordinatları) ve Temel Ödev Hesapları
 ve Temel Ödev Hesapları") JEODEZİ8 1 Elipsoid Yüzünde Jeodezik Dik Koordinatlar (Soldner Koordinatları) ve Temel Ödev Hesapları Jeodezik dik koordinatları tanımlamak için önce bir meridyen x ekseni olarak alınır. Bunun üzerinde
JEODEZİ8 1 Elipsoid Yüzünde Jeodezik Dik Koordinatlar (Soldner Koordinatları) ve Temel Ödev Hesapları Jeodezik dik koordinatları tanımlamak için önce bir meridyen x ekseni olarak alınır. Bunun üzerinde
 hkm Jeodezi, Jeoinformasyon ve Arazi Yönetimi Dergisi 2008/1 Sayý 98 www.hkmo.org.tr Bulanýk Çýkarým Sistemleri ile Heyelan Bloklarýnýn Belirlenmesi: Gürpýnar Örneði Mustafa ACAR 1, Michaela HABERLER-WEBER
hkm Jeodezi, Jeoinformasyon ve Arazi Yönetimi Dergisi 2008/1 Sayý 98 www.hkmo.org.tr Bulanýk Çýkarým Sistemleri ile Heyelan Bloklarýnýn Belirlenmesi: Gürpýnar Örneði Mustafa ACAR 1, Michaela HABERLER-WEBER
Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi. DOİ: /fmbd Üç Boyutlu Koordinat Dönüşüm Yöntemlerinin İncelenmesi
 Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi Afyon Kocatepe University Journal of Science and Engineering AKÜ FEMÜBİD 18 (2018) 015503 (250-255) AKU J. Sci. Eng. 18 (2018) 015503 (250-255)
Afyon Kocatepe Üniversitesi Fen ve Mühendislik Bilimleri Dergisi Afyon Kocatepe University Journal of Science and Engineering AKÜ FEMÜBİD 18 (2018) 015503 (250-255) AKU J. Sci. Eng. 18 (2018) 015503 (250-255)
Gerçek Zamanlı PPP Servisleri ve Sayısal Hava Tahmin Modelleri ile Atmosferdeki Su Buharı Değişimlerinin İzlenmesi
 TMMOB Harita ve Kadastro Mühendisleri Odası, 16. Türkiye Harita Bilimsel ve Teknik Kurultayı, 3-6 Mayıs 2017, Ankara. Gerçek Zamanlı PPP Servisleri ve Sayısal Hava Tahmin Modelleri ile Atmosferdeki Su
TMMOB Harita ve Kadastro Mühendisleri Odası, 16. Türkiye Harita Bilimsel ve Teknik Kurultayı, 3-6 Mayıs 2017, Ankara. Gerçek Zamanlı PPP Servisleri ve Sayısal Hava Tahmin Modelleri ile Atmosferdeki Su
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ. Prof. Dr. Mualla YALÇINKAYA
 JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ Prof. Dr. Mualla YALÇINKAYA Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2018 DOĞRULUK ve DUYARLIK (Hassasiyet) DOĞRULUK ve DUYARLIK Doğruluk,
JEODEZİK VERİLERİN İSTATİSTİK ANALİZİ Prof. Dr. Mualla YALÇINKAYA Karadeniz Teknik Üniversitesi, Harita Mühendisliği Bölümü Trabzon, 2018 DOĞRULUK ve DUYARLIK (Hassasiyet) DOĞRULUK ve DUYARLIK Doğruluk,
Journal of Engineering and Natural Sciences Mühendislik ve Fen Bilimleri Dergisi RTK GPS SİSTEMİNİN POLİGON ÖLÇMELERİNDE KULLANIMI
 Journal of Engineering and Natural Sciences Mühendislik ve Fen Bilimleri Dergisi Sigma 2004/1 RTK GPS SİSTEMİNİN POLİGON ÖLÇMELERİNDE KULLANIMI Ömer AYDIN, Ercenk ATA *, Atınç PIRTI Yıldız Teknik Üniversitesi,
Journal of Engineering and Natural Sciences Mühendislik ve Fen Bilimleri Dergisi Sigma 2004/1 RTK GPS SİSTEMİNİN POLİGON ÖLÇMELERİNDE KULLANIMI Ömer AYDIN, Ercenk ATA *, Atınç PIRTI Yıldız Teknik Üniversitesi,
İKİ BOYUTLU AĞLARDA AĞIRLIK SEÇİMİNİN DENGELEME SONUÇLARINA ETKİSİ VE GPS KOORDİNATLARI İLE KARŞILAŞTIRILMASI
 SELÇUK TEKNİK ONLİNE DERGİSİ / ISSN 1302 6178 Volume 1, Number: 3 2001 İKİ BOYUTLU AĞLARDA AĞIRLIK SEÇİMİNİN DENGELEME SONUÇLARINA ETKİSİ VE GPS KOORDİNATLARI İLE KARŞILAŞTIRILMASI Doç Dr. Cevat İNAL S.Ü.
SELÇUK TEKNİK ONLİNE DERGİSİ / ISSN 1302 6178 Volume 1, Number: 3 2001 İKİ BOYUTLU AĞLARDA AĞIRLIK SEÇİMİNİN DENGELEME SONUÇLARINA ETKİSİ VE GPS KOORDİNATLARI İLE KARŞILAŞTIRILMASI Doç Dr. Cevat İNAL S.Ü.
QUANTILE REGRESYON * Quantile Regression
 QUANTILE REGRESYON * Quantile Regression Fikriye KURTOĞLU İstatistik Anabilim Dalı Olcay ARSLAN İstatistik Anabilim Dalı ÖZET Bu çalışmada, Lineer Regresyon analizinde kullanılan en küçük kareler yöntemine
QUANTILE REGRESYON * Quantile Regression Fikriye KURTOĞLU İstatistik Anabilim Dalı Olcay ARSLAN İstatistik Anabilim Dalı ÖZET Bu çalışmada, Lineer Regresyon analizinde kullanılan en küçük kareler yöntemine
ÖZGEÇMİŞ. Adı Soyadı : Mevlüt YETKİN. İletişim Bilgileri:
 ÖZGEÇMİŞ Adı Soyadı : Mevlüt YETKİN Ünvanı : Yard. Doç. Dr. İletişim Bilgileri: İş Adresi İzmir Kâtip Çelebi Üniversitesi, Mühendislik-Mimarlık Fakültesi, Harita Mühendisliği Bölümü, Balatçık Mahallesi,
ÖZGEÇMİŞ Adı Soyadı : Mevlüt YETKİN Ünvanı : Yard. Doç. Dr. İletişim Bilgileri: İş Adresi İzmir Kâtip Çelebi Üniversitesi, Mühendislik-Mimarlık Fakültesi, Harita Mühendisliği Bölümü, Balatçık Mahallesi,
THE EFFECT TO GEOREFERENCING ACCURACY OF CONTROL TARGETS IN TERRESTRIAL LASER SCANNING APPLICATIONS
 YERSEL LAZER TARAMA UYGULAMALARINDA KONTROL HEDEFLERİNİN KONUMLANDIRMA DOĞRULUĞUNA ETKİSİ K. GÜMÜŞ 1, H.ERKAYA 2 1 Niğde Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü, Ölçme Tekniği Anabilim
YERSEL LAZER TARAMA UYGULAMALARINDA KONTROL HEDEFLERİNİN KONUMLANDIRMA DOĞRULUĞUNA ETKİSİ K. GÜMÜŞ 1, H.ERKAYA 2 1 Niğde Üniversitesi, Mühendislik Fakültesi, Harita Mühendisliği Bölümü, Ölçme Tekniği Anabilim
Dr. Fatih AY. Tel:
 Dr. Fatih AY Tel: 0 388 225 22 55 ayfatih@nigde.edu.tr Güneş Sabiti (The Solar Constant) ve Atmosfer Dışı Işınımın Değişimi Güneş Açıları Atmosfer Dışında Yatay Düzleme Gelen Güneş Işınımı 2 Bu bölümde
Dr. Fatih AY Tel: 0 388 225 22 55 ayfatih@nigde.edu.tr Güneş Sabiti (The Solar Constant) ve Atmosfer Dışı Işınımın Değişimi Güneş Açıları Atmosfer Dışında Yatay Düzleme Gelen Güneş Işınımı 2 Bu bölümde
Atmosferik torklardan elde edilen mevsimsel ve mevsim-içi kutup gezinmesi değişimleri**
 UCTEA Chamber of Surveying and Cadastre Engineers Journal of Geodesy and Geoinformation TMMOB Harita ve Kadastro Mühendisleri Odası Jeodezi ve Jeoinformasyon Dergisi Cilt 1 Sayı 2 ss.123-129 Kasım 212
UCTEA Chamber of Surveying and Cadastre Engineers Journal of Geodesy and Geoinformation TMMOB Harita ve Kadastro Mühendisleri Odası Jeodezi ve Jeoinformasyon Dergisi Cilt 1 Sayı 2 ss.123-129 Kasım 212
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
3. V, R 3 ün açık bir altkümesi olmak üzere, c R. p noktasında yüzeye dik olduğunu gösteriniz.(10
 Diferenisyel Geometri 2 Yazokulu 2010 AdıSoyadı: No : 1. ϕ (u, v) = ( u + 2v, v + 2u, u 2 v ) parametrizasyonu ile verilen M kümesinin bir regüler yüzey olduğunu gösteriniz. (15 puan) 3. V, R 3 ün açık
Diferenisyel Geometri 2 Yazokulu 2010 AdıSoyadı: No : 1. ϕ (u, v) = ( u + 2v, v + 2u, u 2 v ) parametrizasyonu ile verilen M kümesinin bir regüler yüzey olduğunu gösteriniz. (15 puan) 3. V, R 3 ün açık
COMPARISION OF CLASSIC RTK, NETWORK RTK AND TOTAL STATION TECHNIQUES IN DETERMINATION OF POINT POSITIONS
 NOKTA KONUMLARININ BELİRLENMESİNDE KLASİK RTK, AĞ RTK VE TOTAL STATION TEKNİKLERİNİN KARŞILAŞTIRILMASI S.BULBUL 1, C.İNAL 1, Ö.YILDIRIM 2 1 Selçuk Üniversitesi, Mühendislik Fakültesi, Harita Müh. Bölümü,Ölçme
NOKTA KONUMLARININ BELİRLENMESİNDE KLASİK RTK, AĞ RTK VE TOTAL STATION TEKNİKLERİNİN KARŞILAŞTIRILMASI S.BULBUL 1, C.İNAL 1, Ö.YILDIRIM 2 1 Selçuk Üniversitesi, Mühendislik Fakültesi, Harita Müh. Bölümü,Ölçme
MEKANİK TİTREŞİMLER DERS NOTLARI
 SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER DERS NOTLARI 2015 BAHAR 2 KAYNAKLAR 1. Mekanik Titreşimler, Birsen Kitabevi, Prof. Dr. Fuat Pasin 2. Mechanical
HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI
 HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI Emre SERT Anadolu Isuzu Otomotiv A.Ş 1. Giriş Özet Ticari araç kazalarının çoğu devrilme ile sonuçlanmaktadır bu nedenle devrilme
HAFİF TİCARİ KAMYONETİN DEVRİLME KONTROLÜNDE FARKLI KONTROLÖR UYGULAMALARI Emre SERT Anadolu Isuzu Otomotiv A.Ş 1. Giriş Özet Ticari araç kazalarının çoğu devrilme ile sonuçlanmaktadır bu nedenle devrilme
DOPPLEE KOORDÎNATIARIMN ÜLKE NÎEENGÎ KOOBDÎNATLâMÎYhA KAKŞBLAŞTHEILMASI
 DOPPLEE KOORDÎNATIARIMN ÜLKE NÎEENGÎ KOOBDÎNATLâMÎYhA KAKŞBLAŞTHEILMASI Müh. Yüksel ALHNEE Batı Almanya Bonn Üniversitesi t ABSTKACT ' ' Elipsoidal tîıree diamemsional coordinate system (X, Y, Z) ot any
DOPPLEE KOORDÎNATIARIMN ÜLKE NÎEENGÎ KOOBDÎNATLâMÎYhA KAKŞBLAŞTHEILMASI Müh. Yüksel ALHNEE Batı Almanya Bonn Üniversitesi t ABSTKACT ' ' Elipsoidal tîıree diamemsional coordinate system (X, Y, Z) ot any
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
ARAZİ ÖLÇMELERİ. Koordinat sistemleri. Kartezyen koordinat sistemi
 Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Harita Projeksiyonları
 Özellikler Harita Projeksiyonları Bölüm 3: Silindirik Projeksiyonlar İzdüşüm yüzeyi, küreyi saran ya da kesen bir silindir seçilir. Silindirik projeksiyonlar genellikle normal konumda ekvator bölgesinde
Özellikler Harita Projeksiyonları Bölüm 3: Silindirik Projeksiyonlar İzdüşüm yüzeyi, küreyi saran ya da kesen bir silindir seçilir. Silindirik projeksiyonlar genellikle normal konumda ekvator bölgesinde
GPS ÖLÇÜMLERİNİN DEĞERLENDİRİLMESİNDE FARKLI FAZ KOMBİNASYONLARININ KULLANILMASI
 GPS ÖLÇÜMLERİNİN DEĞERLENDİRİLMESİNDE FARKLI FAZ KOMBİNASYONLARININ KULLANILMASI H. Kemaldere 1, H. Kutoğlu 2, Ç. Mekik 3 1 Zonguldak Karaelmas Üniversitesi, Jeodezi ve Fotogrametri Müh.Bölümü, Jeodezi
GPS ÖLÇÜMLERİNİN DEĞERLENDİRİLMESİNDE FARKLI FAZ KOMBİNASYONLARININ KULLANILMASI H. Kemaldere 1, H. Kutoğlu 2, Ç. Mekik 3 1 Zonguldak Karaelmas Üniversitesi, Jeodezi ve Fotogrametri Müh.Bölümü, Jeodezi
ARAZİ ÖLÇMELERİ. Koordinat sistemleri. Kartezyen koordinat sistemi
 Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
Koordinat sistemleri Coğrafik objelerin haritaya aktarılması, objelerin detaylarına ait koordinatların düzleme aktarılması ile oluşur. Koordinat sistemleri kendi içlerinde kartezyen koordinat sistemi,
TRABZON İLİ İÇİN JEOİD ONDÜLASYONLARI BELİRLEME AMACIYLA ENTERPOLASYON YÖNTEMLERİNİN UYGULANMASI
 TMMOB Harita ve Kadastro Mühendisleri Odası, 15. Türkiye Harita Bilimsel ve Teknik Kurultayı, 25 28 Mart 2015, Ankara. TRABZON İLİ İÇİN JEOİD ONDÜLASYONLARI BELİRLEME AMACIYLA ENTERPOLASYON YÖNTEMLERİNİN
TMMOB Harita ve Kadastro Mühendisleri Odası, 15. Türkiye Harita Bilimsel ve Teknik Kurultayı, 25 28 Mart 2015, Ankara. TRABZON İLİ İÇİN JEOİD ONDÜLASYONLARI BELİRLEME AMACIYLA ENTERPOLASYON YÖNTEMLERİNİN
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa