Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi.
|
|
|
- Özgür Başar
- 8 yıl önce
- İzleme sayısı:
Transkript
1 ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak amacı ile kullanılan plastik bir kutu kullanılmıştır. Araç üç tekere sahip ve tekerlerden biri serbestçe dönebilirken diğer iki teker araca hareket veren ayrıca aracın dönüşü için de kullanılan iki motora bağlı hareket edebiliyor. Motorlara güç sağlamak için iki adet 12V 1,3 Ah akü, kontrol devresine ve sensörlere güç sağlamak için ise üç adet 9V kuru pil kullanılmıştır. Araç Çalışma Mantığı: Araçta önde bir adet serbest tekerlek ve arkada iki adet birbirinden bağımsız hareket eden iki elektrik motoruna bağlı iki tekerlek bulunuyor. Öndeki serbest tekerlek herhangi bir motor veya hareketlendirici mekanizmaya bağlı değil. Yani ön tekerlek aracın dönmesini etkilemiyor, aracın dönmesinden etkileniyor. Araçtaki dönme hareketini arkadaki birbirinden bağımsız hareket edebilen motorlara bağlı tekerlekler sağlıyor. Bu iki tekerlek arasındaki açısal hız farkı aracın bir daire çizmesini sağlıyor. Kontrol ve motor sürücü devremiz bu iki motora farklı hızlarda dönecek şekilde güç verdiği zaman araç dönme hareketi yapıyor. 1

2 Şekilde de görüldüğü üzere tekerlekler farklı hızlarda döndüğünde aynı zamanda tekerleklerden biri x1 yolunu kat ederken diğer tekerlek x2 kadar yol gidiyor ve böylece araba dönmüş oluyor. Aslında bu araç döner iken tekerleklerin farklı hızlarda dönmesi, araçlarda karşılaşılan bir sorundur. Eğer ön tekere aracı yönlendirecek bir mekanizma kurmuş, aracı ileri yönde hareket ettirmek için arka tekerlere bir motor takmış olsa idik bu sorunun tersi ile karşı karşıya kalacaktık. Yani arka tekerleri farklı hızlarda çevirmek zorunda kalacaktık. Kullandığımız dört tekerli araçlarda bu sorun mekanik olarak diferansiyel ile çözülmüştür. Araca hareketi diferansiyel adı verilen bir mekanizma ile verilmektedir. Bu mekanizma iki tekere uygulanan momenti eşit tutar böylece tekerler yolda kaymadan farklı hızlarda dönebilirler. Elektrikli arabalarda diferansiyel elektronik olarak gerçeklenebilir. Buna elektronik diferansiyel adı verilir. Bizim kullandığımız sisteme de elektronik diferansiyel adını vermek mümkün. Biz elektronik diferansiyeli dönen aracın tekerlerini farklı hızlarda çevirmek için değil, aracı döndürmek için kullanıyoruz. Mekanik Kısım: Mekanik kısım iki farklı redüktörlü elektrik motorunun bir kutuya monte edilmesi ile gerçeklenmiştir. Kutuya ayrıca bir adet serbest tekerlek de monte edilmiştir. Tekerlekler ise motor miline montelidir. Aküler, piller ve devreler de aynı kutuya yerleştirilmiştir. Kutunun plastik olması kutulama işlemini oldukça kolaylaştırmıştır. Ayrıca aküler ve piller için kesici anahtarlar da kullanılmıştır. İlk kullandığımız araçta yeterli performansı yakalayamamamız nedeniyle yeni bir tasarım yoluna gittik. Bu tasarım beklentilerimizi karşılasa bile araçtan daha çok tekerlekli bir güç kaynağına benzemesi nedeniyle biraz komik görünmektedir. İkinci aracı gerçekler iken en zor bulduğumuz parça tekerlekler oldu. Hatta tekerlekleri bulamayıp, tornacıya yaptırmak zorunda kaldık. 2

3 Aşağıda daha önceki tasarımlara ve yeni tasarıma ait fotoğraflar bulunmaktadır. İlk tasarım oldukça basit düşünüldü. Tekerlek olarak kullandığımız parça aynı zamanda motordan tekere hareket aktaran dişlidir. 3

4 İkinci tasarım pratik olması açısından hazır bir uzaktan kumandalı arabadan alınmıştır. Fakat bu tasarım istenen performansı verememiştir. Gerek dişli aktarım oranı gerek tekerleklerin yola tutunması bizim için yeterli değildi. Yine de ODTU Robot Topluluğunun düzenlediği yarışmaya elimizde sadece bu tasarım olduğu, ve vaktin de dar olması nedeniyle bu araçla katıldık. Son tasarımda bu iki tasarımda kazandığımız tecrübe sayesinde fazla zorlanmadık. Aracın tasarımı, parçaların temini ve montajı bir gün ve o günün gecesinde sabaha kadar tamamlandı sayılabilir. Sadece sensörlerin yerleşimi ertesi gün tekrar düzenlenmiştir. Aşağıdaki resimde kutunun üzeri açık halde görülmektedir. Sensörler aracın altında, ön tarafta bulunmaktadır. Bu son tasarım dişli oranlarının yüksek olması sayesinde diğer tasarımlardan daha iyi bir performans göstermiştir. Tekerlekler ise yola diğer tasarımdan daha iyi bir tutuş sağlamaktadır. 4

5 Aracın diğer fotoğrafları aşağıda gösterilmiştir. 5
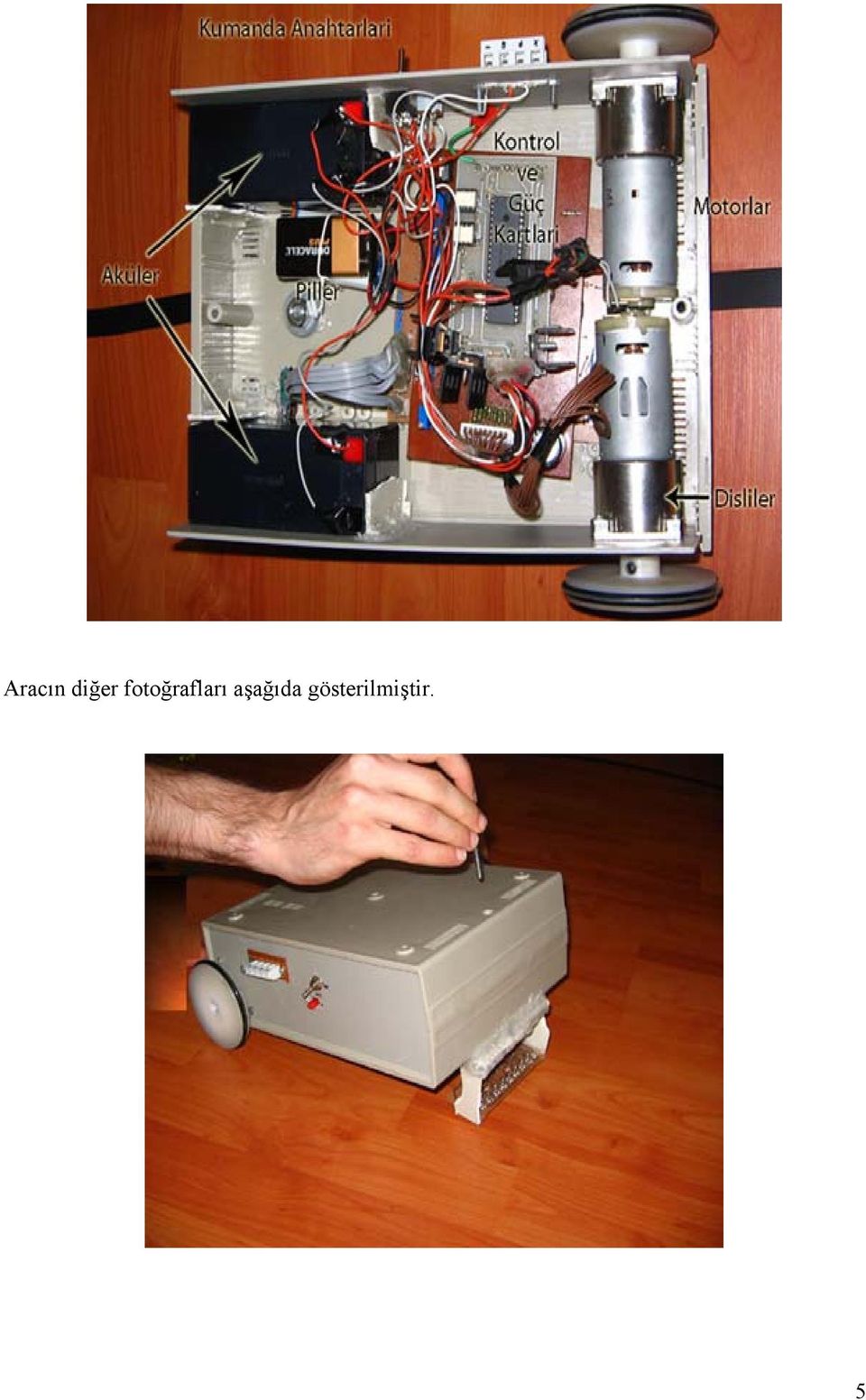
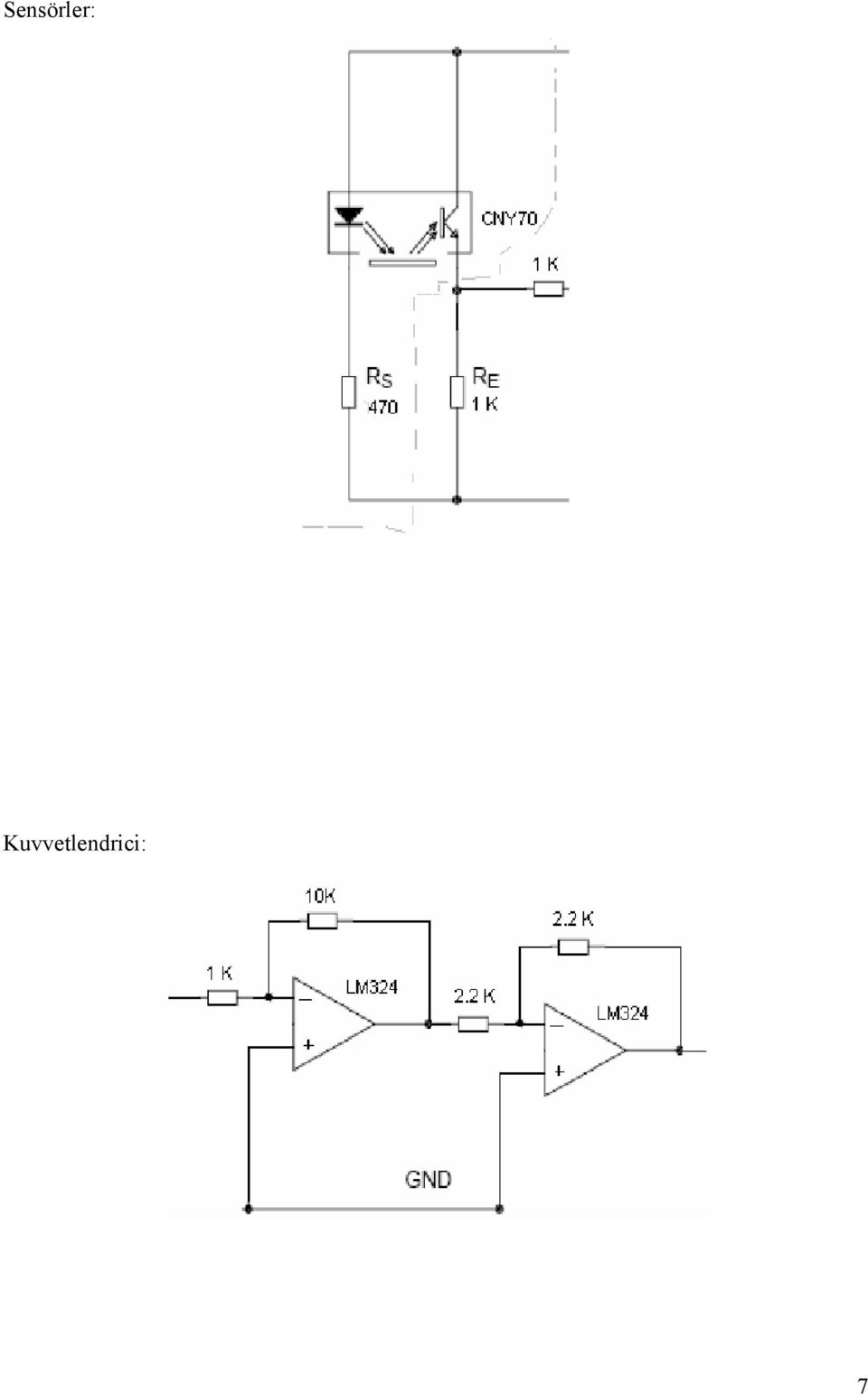
6 Elektronik Kısım: Aracın çizgiyi tanıyabilmesi için CNY 70 optik (optical reflective) sensör kullanılmıştır. Bu sensör kızıl ötesi ışık ile çalışmaktadır. Entegre bir kızıl ötesi led ile fototransistör barındırmaktadır. Led, yere kızıl ötesi ışık yollamakta, yansıyan ışık ise fototransistörde yansıma miktarına göre akım üretmektedir. Bu üretilen akım farklı renkler için farklı olacaktır. Bu sayede yere çizilen siyah bir çizgiyi algılayabiliyoruz. Bu akımı direnç üzerinde gerilime çevirip, bu gerilimi kuvvetlendirdikten sonra karşılaştırma devresi sayesinde sensörlerden aldığımız bilgileri mikroişlemcinin anlayabileceği sayısal işaretlere çevirmiş oluyoruz. Güç devresi ise mikro işlemcinin ürettiği PWM işareti ile bir mosfet tetiklenerek gerçeklenmiştir. 6

7 Sensörler: Kuvvetlendrici: 7
8 Karşılaştırma: Güç: Sistem Modeli ve Kontrolör Hakkında: Araç iki boyutta hareket edebilmektedir. Aracın iki boyutta iki eksende konumu ve ayrıca yönü, konum bilgisi olarak mevcuttur. Aracın bu üç boyuttaki konumunu durum olarak alıp araca ait bir model çıkarmamız mümkün. Fakat bu model doğrusal olmayacaktır. Modeli doğrusallıktan çıkaran sadece sinüsoidal fonksiyon olması değil, ayrıca aldığımız modellerin birbiri ile çarpım durumunda olmasıdır. Aracın modelini yaklaşık olarak bile bulamıyoruz. Ancak biliyoruz ki geri besleme işareti olarak kullandığımız işaret aracın konumu ile ilgili bir işaret. Araca hareket verirken ise motorların gerilimlerini, dolayısı ile hızlarını değiştiriyoruz. Yani sonuç olarak sisteme giriş 8

9 işareti ile sistemden aldığımız geri besleme işareti arasında, konum ve hız arasındaki ilişkiden ötürü serbest integratör mevcut. Bu nedenle bir çeşit PD kontrolör kullanmayı düşündük. PD kontrolörü tasarlamamız mümkün değil. Çünkü sisteme ait modeli bilmiyoruz. Bir çeşit PD diyoruz çünkü kontrolörümüz tam bir PD değil. Fakat kontrol işaretini hata işaretinin büyüklüğüne ve değişimine bağlı belirliyoruz. Sisteme kontrol işareti olarak tekerleklerin açısal hız farkı kullandığımızı düşünebiliriz. Ayrıca aracın hata sıfır iken hareket ediyor olması gerekli. Sistemden okuduğumuz, geri besleme olarak kullandığımız işaretin kelime derinliği oldukça düşük. Geri besleme işareti 19 farklı büyüklükte olabiliyor. Bu işareti sistemdeki 9 tane sensörden okuyoruz. Bu dört sensörden bir ya da iki tanesini aynı anda çizgiyi görebiliyor. PD kontrolörün tasarımında farklı kombinasyonlar deneyerek bulduğumuz en iyi kontrolörü kullandık. Kontrolörün Uygulanması: Kontrolör uygulamak için PIC 16F877 mikro denetleyici kullandık. Bu denetleyiciyi kullanma nedenlerimiz bu işlemciyi biliyor olmamız, işlemcinin PWM çıkışı olması ve işlemci üzeride yeteri kadar giriş portu olmasıdır. İlk olarak hata işaretini üretmemiz gerekli. Bunun için sensörlerden okuduğumuz bilgiyi bizim için anlamlı sayılara çevirmemiz gerekti. Sensörlerden aynı anda bir veya iki tanesi çizgiyi görüyor. Ayrıca çizginin araca fazla eğimli olması halinde daha fazla sensörün de çizgiyi görmesi mümkün. Çizgiyi normalde bir veya iki sensör gördüğü için 19 farklı durum oluşabiliyor. Bu durumlardan iki tanesi hiçbir sensörün çizgiyi görmemesi durumu. Bu iki durumu birbirinden ayıran ise bir durumda aracın sağdan, diğer durumda soldan çıkmış olması. Bu amaçla her sensöre belli ağırlıklar vererek (ardışıl sensörlere ardışıl tek saılar denk düşecek şekilde) ortalama alarak sensörlerden gelen verileri 0 ile 18 arası bir veriye denk düşürdük. 9

10 Kullandığımız işlemci ile zaman kesmesi kullanarak aslında doğrusal olmayan bir kontrolör kullandık. İşlemcide çarpma işlemi yapmamız mümkün olduğu halde işlemcide vakit aldığı için geri besleme işaretimizin kelime derinliğinin düşük olmasından da faydalanarak bir dizi değişkeni kullandık. 10

Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Robot Bilimi. Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI. r1.0
 Öğr. Gör. M. Ozan AKI. r1.0") Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
SEVİYE MODLU ARDIŞIL DEVRELER 1- GENEL TANITIM. KTÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Sayısal Tasarım Laboratuarı
 KTÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Sayısal Tasarım Laboratuarı SEVİYE MODLU ARDIŞIL DEVRELER - GENEL TANITIM Seviye modlu ardışıl devreler, kombinasyonal devrelere geri besleme özelliği
KTÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Sayısal Tasarım Laboratuarı SEVİYE MODLU ARDIŞIL DEVRELER - GENEL TANITIM Seviye modlu ardışıl devreler, kombinasyonal devrelere geri besleme özelliği
IŞIK ĐZLEYEN ROBOT PROJESĐ FOLLOWĐNG ROBOT SĐNOP LIGHT PROJECT. Proje Yürütücüleri Bünyamin TANGAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü
 IŞIK ĐZLEYEN ROBOT PROJESĐ FOLLOWĐNG ROBOT SĐNOP LIGHT PROJECT Proje Yürütücüleri Bünyamin TANGAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü 1 ÖZET Bu projenin amacı, basit elektronik ve mekanik
IŞIK ĐZLEYEN ROBOT PROJESĐ FOLLOWĐNG ROBOT SĐNOP LIGHT PROJECT Proje Yürütücüleri Bünyamin TANGAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü 1 ÖZET Bu projenin amacı, basit elektronik ve mekanik
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER. Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul
 OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin
Sensörler Yrd.Doç.Dr. İlker ÜNAL Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin
5.BÖLÜM ÇİZGİ İZLEYEN ROBOT
 5.BÖLÜM ÇİZGİ İZLEYEN ROBOT Çizgi izleyen robot bu kitapta yer alan yapımı en kolay robottur. Robotlar hakkında temel bilgileri edinebilmek için çizgi izleyen robot uygulamasını yapmak yeterli olacaktır.
5.BÖLÜM ÇİZGİ İZLEYEN ROBOT Çizgi izleyen robot bu kitapta yer alan yapımı en kolay robottur. Robotlar hakkında temel bilgileri edinebilmek için çizgi izleyen robot uygulamasını yapmak yeterli olacaktır.
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür ksengur@firat.edu.tr
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işık İzleyen Araba Projesi Proje No 2 Proje Raporu Adı, Soyadı, Öğrenci
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işık İzleyen Araba Projesi Proje No 2 Proje Raporu Adı, Soyadı, Öğrenci
 https://www.facebook.com/groups/alisrobotics/ https://www.instagram.com/alikesfet/ Bline Kutu İçeriği 2x Redüktörlü DC Motor 2x Tekerlek 1x Akıllı Araç Şasesi 1x Arduino Uno 1x USB Kablosu 1x Alis Robotics
https://www.facebook.com/groups/alisrobotics/ https://www.instagram.com/alikesfet/ Bline Kutu İçeriği 2x Redüktörlü DC Motor 2x Tekerlek 1x Akıllı Araç Şasesi 1x Arduino Uno 1x USB Kablosu 1x Alis Robotics
MEKATRONİĞİN TEMELLERİ
 MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa 2 Nolu Proje
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
5.13. SONDAJ MAKİNESİ PROJESİ
 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE. Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI
 ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
Alıcı Devresi; Sinyali şu şekilde modüle ediyoruz;
 Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
UPSLIFT ASANSÖR KURTARMA GÜÇ MODÜLÜ KULLANIM KILAVUZU
 UPSLIFT ASANSÖR KURTARMA GÜÇ MODÜLÜ KULLANIM KILAVUZU Sürüm: 1.0 BÖLÜM 1-UYARILAR... 1 BÖLÜM 2-TEKNİK ÖZELLİKLER... 2 2.1 ELEKTRİKSEL ÖZELLİKLER... 2 2.2 MEKANİK ÖZELLİKLER... 3 BÖLÜM 3-UPSLIFT İÇİN UYGUN
UPSLIFT ASANSÖR KURTARMA GÜÇ MODÜLÜ KULLANIM KILAVUZU Sürüm: 1.0 BÖLÜM 1-UYARILAR... 1 BÖLÜM 2-TEKNİK ÖZELLİKLER... 2 2.1 ELEKTRİKSEL ÖZELLİKLER... 2 2.2 MEKANİK ÖZELLİKLER... 3 BÖLÜM 3-UPSLIFT İÇİN UYGUN
MAKİNE ELEMANLARI - (8.Hafta) VİDALAR -1
 VİDALAR -1") A. TEMEL KAVRAMLAR MAKİNE ELEMANLARI - (8.Hafta) VİDALAR -1 B. VİDA TÜRLERİ a) Vida Profil Tipleri Mil üzerine açılan diş ile lineer hareket elde edilmek istendiğinde kullanılır. Üçgen Vida Profili: Parçaları
A. TEMEL KAVRAMLAR MAKİNE ELEMANLARI - (8.Hafta) VİDALAR -1 B. VİDA TÜRLERİ a) Vida Profil Tipleri Mil üzerine açılan diş ile lineer hareket elde edilmek istendiğinde kullanılır. Üçgen Vida Profili: Parçaları
5. (10 Puan) Op-Amp devresine aşağıda gösterildiği gibi bir SİNÜS dalga formu uygulanmıştır. Op-Amp devresinin çıkış sinyal formunu çiziniz.
 Op-Amp devresine aşağıda gösterildiği gibi bir SİNÜS dalga formu uygulanmıştır. Op-Amp devresinin çıkış sinyal formunu çiziniz.") MAK442 MT3-MEKATRONİK S Ü L E Y M A N D E MİREL ÜNİVERSİTES E Sİ M Ü H E N DİSLİK-MİMM A R L I K F A K Ü L T E Sİ M A KİNA M Ü H E N DİSLİĞİ BÖLÜMÜ Ü ÖĞRENCİ ADI NO İMZA SORU/PUAN 1/15 2/15 3/10 4/10 5/10
MAK442 MT3-MEKATRONİK S Ü L E Y M A N D E MİREL ÜNİVERSİTES E Sİ M Ü H E N DİSLİK-MİMM A R L I K F A K Ü L T E Sİ M A KİNA M Ü H E N DİSLİĞİ BÖLÜMÜ Ü ÖĞRENCİ ADI NO İMZA SORU/PUAN 1/15 2/15 3/10 4/10 5/10
Robotus ile Robotik Eğitimi
 Robotik eğitimlerimizde amaç öğrencilerinizin robotiğe ilgilerini uyandırmak ve bilime yönelik çalışmalarını arttırmaktadır. Robotus ile Robotik Eğitimi www.robotus.net 2013 1 Robotus ile Robotik Eğitimi
Robotik eğitimlerimizde amaç öğrencilerinizin robotiğe ilgilerini uyandırmak ve bilime yönelik çalışmalarını arttırmaktadır. Robotus ile Robotik Eğitimi www.robotus.net 2013 1 Robotus ile Robotik Eğitimi
PIC 16F877A ile DA MOTOR KONTROLLÜ ROBOT UYGULAMASI DC MOTOR CONTROLLED ROBOT APPLICATION WITH USING PIC 16F877A
 PIC 16F877A ile DA MOTOR KONTROLLÜ ROBOT UYGULAMASI DC MOTOR CONTROLLED ROBOT APPLICATION WITH USING PIC 16F877A Recep AYRANCI, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Bayram BEDER, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,
PIC 16F877A ile DA MOTOR KONTROLLÜ ROBOT UYGULAMASI DC MOTOR CONTROLLED ROBOT APPLICATION WITH USING PIC 16F877A Recep AYRANCI, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Bayram BEDER, ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
ANAHTARLI RELÜKTANS MOTORUN SAYISAL HIZ KONTROLÜ
 ANAHTARLI RELÜKTANS MOTORUN SAYISAL HIZ KONTROLÜ Zeki OMAÇ Hasan KÜRÜM Fırat Üniversitesi Bingöl Meslek Yüksekokulu Bingöl Fırat Üniversitesi Mühendislik Fakültesi Elektrik - Elektronik Mühendisliği Bölümü
ANAHTARLI RELÜKTANS MOTORUN SAYISAL HIZ KONTROLÜ Zeki OMAÇ Hasan KÜRÜM Fırat Üniversitesi Bingöl Meslek Yüksekokulu Bingöl Fırat Üniversitesi Mühendislik Fakültesi Elektrik - Elektronik Mühendisliği Bölümü
Hazırlayan: Tugay ARSLAN
 Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
1.Endüksiyon Motorları
 1.Endüksiyon Motorları Kaynak: John Storey, How real electric motors work, UNIVERSITY OF NEW SOUTH WALES - SYDNEY AUSTRALIA, http://www.phys.unsw.edu.au/hsc/hsc/electric_motors.html Her modern evde endüksiyon
1.Endüksiyon Motorları Kaynak: John Storey, How real electric motors work, UNIVERSITY OF NEW SOUTH WALES - SYDNEY AUSTRALIA, http://www.phys.unsw.edu.au/hsc/hsc/electric_motors.html Her modern evde endüksiyon
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
GÜNEŞ ENERJİLİ CEP TELEFONU ŞARJ CİHAZI KULLANMA KILAVUZU
 GÜNEŞ ENERJİLİ CEP TELEFONU ŞARJ CİHAZI KULLANMA KILAVUZU 1. GÜVENLİK TALİMATLARI Genel Olarak; Lütfen, ürünü kullanmadan önce, bu ürünle beraber verilen dökümanları okuyun böylece güvenlik talimatlarını
GÜNEŞ ENERJİLİ CEP TELEFONU ŞARJ CİHAZI KULLANMA KILAVUZU 1. GÜVENLİK TALİMATLARI Genel Olarak; Lütfen, ürünü kullanmadan önce, bu ürünle beraber verilen dökümanları okuyun böylece güvenlik talimatlarını
Yumuşak Yol Vericiler - TEORİ
 Yumuşak Yol Vericiler - TEORİ 1. Gerilimi Düşürerek Yolverme Alternatif akım endüksiyon motorları, şebeke gerilimine direkt olarak bağlandıklarında, yol alma başlangıcında şebekeden Kilitli Rotor Akımı
Yumuşak Yol Vericiler - TEORİ 1. Gerilimi Düşürerek Yolverme Alternatif akım endüksiyon motorları, şebeke gerilimine direkt olarak bağlandıklarında, yol alma başlangıcında şebekeden Kilitli Rotor Akımı
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ F A K Ü L T E S İ O T O M O T İ V M Ü H E N D İ S L İ Ğ İ P R O G R A M I
 OTM309 MEKATRONİK S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ F A K Ü L T E S İ O T O M O T İ V M Ü H E N D İ S L İ Ğ İ P R O G R A M I ÖĞRENCİ ADI NO İMZA TARİH 26.11.2013
OTM309 MEKATRONİK S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ F A K Ü L T E S İ O T O M O T İ V M Ü H E N D İ S L İ Ğ İ P R O G R A M I ÖĞRENCİ ADI NO İMZA TARİH 26.11.2013
MEKATRONİĞE GİRİŞ (EEP251)
") MEKATRONİĞE GİRİŞ (EEP251) Yazar: Yrd.Doç.Dr. Durmuş KARAYEL S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
MEKATRONİĞE GİRİŞ (EEP251) Yazar: Yrd.Doç.Dr. Durmuş KARAYEL S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MOTORLARI VE SÜRÜCÜLER ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ
 BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir.
 ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
MİKROİŞLEMCİ İLE A/D DÖNÜŞÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR ORGANİZASYONU LABORATUVARI MİKROİŞLEMCİ İLE A/D DÖNÜŞÜMÜ 1. GİRİŞ Analog işaretleri sayısal işaretlere dönüştüren elektronik devrelere
KARADENİZ TEKNİK ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR ORGANİZASYONU LABORATUVARI MİKROİŞLEMCİ İLE A/D DÖNÜŞÜMÜ 1. GİRİŞ Analog işaretleri sayısal işaretlere dönüştüren elektronik devrelere
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş
 Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
PWM Doğrultucular. AA/DA güç dönüşümü - mikroelektronik devrelerin güç kaynaklarında, - elektrikli ev aletlerinde,
 PWM DOĞRULTUCULAR PWM Doğrultucular AA/DA güç dönüşümü - mikroelektronik devrelerin güç kaynaklarında, - elektrikli ev aletlerinde, - elektronik balastlarda, - akü şarj sistemlerinde, - motor sürücülerinde,
PWM DOĞRULTUCULAR PWM Doğrultucular AA/DA güç dönüşümü - mikroelektronik devrelerin güç kaynaklarında, - elektrikli ev aletlerinde, - elektronik balastlarda, - akü şarj sistemlerinde, - motor sürücülerinde,
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
ENSTRÜMANTASYON Çelik
 0 BÖLÜM 1 ÖLÇME SİSTEMLERİ Ölçme esas olarak önceden belirlenmiş bir standart yardımıyla bilinmeyen bir büyüklüğün nicel değerinin karşılaştırılmasıdır. Eğer sonucun genel olarak anlamlı ve geçerli olması
0 BÖLÜM 1 ÖLÇME SİSTEMLERİ Ölçme esas olarak önceden belirlenmiş bir standart yardımıyla bilinmeyen bir büyüklüğün nicel değerinin karşılaştırılmasıdır. Eğer sonucun genel olarak anlamlı ve geçerli olması
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş HUNRobotX - PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel - 4 Haziran
Hacettepe Robot Topluluğu PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş HUNRobotX - PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel - 4 Haziran
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2)
") YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
Çizgi İzleyen Robot Yapımı ve Teknik Bilgiler
 Çizgi İzleyen Robot Yapımı ve Teknik Bilgiler ÇİZGİ İZLEYEN ROBOT NEDİR? Çizgi izleyen robot belirli bir yolu otonom olarak takip edebilen robottur. Bu yol siyah zemin üzerinde beyaz renkte ya da beyaz
Çizgi İzleyen Robot Yapımı ve Teknik Bilgiler ÇİZGİ İZLEYEN ROBOT NEDİR? Çizgi izleyen robot belirli bir yolu otonom olarak takip edebilen robottur. Bu yol siyah zemin üzerinde beyaz renkte ya da beyaz
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
O-bOt ile Uygulamalı Deneyler
 O-bOt ile Uygulamalı Deneyler Deney 1: Tekerlek Çapı Gidilen Yol Đlişkisinin Bulunması 1 AMAÇ Bu deneyde, robotu hareket ettirmek için kullandığımız tekerleklerin çaplarının ve motorların dakikada attıkları
O-bOt ile Uygulamalı Deneyler Deney 1: Tekerlek Çapı Gidilen Yol Đlişkisinin Bulunması 1 AMAÇ Bu deneyde, robotu hareket ettirmek için kullandığımız tekerleklerin çaplarının ve motorların dakikada attıkları
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi):
:") KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Şekilde görüldüğü gibi Gerilim/akım yoğunluğu karakteristik eğrisi dört nedenden dolayi meydana gelir.
 Bir fuel cell in teorik açık devre gerilimi: Formülüne göre 100 oc altinda yaklaşık 1.2 V dur. Fakat gerçekte bu değere hiçbir zaman ulaşılamaz. Şekil 3.1 de normal hava basıncında ve yaklaşık 70 oc da
Bir fuel cell in teorik açık devre gerilimi: Formülüne göre 100 oc altinda yaklaşık 1.2 V dur. Fakat gerçekte bu değere hiçbir zaman ulaşılamaz. Şekil 3.1 de normal hava basıncında ve yaklaşık 70 oc da
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
ÇİZGİ İZLEYEN ROBOTU YAPIMI
 ÇİZGİ İZLEYEN ROBOTU YAPIMI Gökhan YALINIZ / Eylül 2013 Çizgi İzleyen-Haprox Giriş Çizgi izleyen robotu, robot yapmaya karar vermiş insanların en çok tercih ettiği robottur.programla dilinde tabir ettiğimiz
ÇİZGİ İZLEYEN ROBOTU YAPIMI Gökhan YALINIZ / Eylül 2013 Çizgi İzleyen-Haprox Giriş Çizgi izleyen robotu, robot yapmaya karar vermiş insanların en çok tercih ettiği robottur.programla dilinde tabir ettiğimiz
YILDIZ TEKNİK ÜNİVERSİTESİ RÜZGAR ENERJİSİ KULÜBÜ RÜZGAR ENERJİSİYLE ÇALIŞAN ARABA PROJESİ RAPORU
 YILDIZ TEKNİK ÜNİVERSİTESİ RÜZGAR ENERJİSİ KULÜBÜ RÜZGAR ENERJİSİYLE ÇALIŞAN ARABA PROJESİ RAPORU ÖZET - Rüzgar Enerjisi Kulübü(REK) Tanıtımı - Türkiye nin Rüzgar Enerjisiyle Çalışan İlk Profesyonel Arabası:
YILDIZ TEKNİK ÜNİVERSİTESİ RÜZGAR ENERJİSİ KULÜBÜ RÜZGAR ENERJİSİYLE ÇALIŞAN ARABA PROJESİ RAPORU ÖZET - Rüzgar Enerjisi Kulübü(REK) Tanıtımı - Türkiye nin Rüzgar Enerjisiyle Çalışan İlk Profesyonel Arabası:
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ PROJE : SUMO ROBOTU PROJE RAPORU
 KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ PROJE : SUMO ROBOTU PROJE RAPORU AYTUĞ DOĞANER 2014010226069 AHMET UYAR 2015010226045 PROJE DANIŞMANI: PROF.DR.AHMET DEMİR 1 İÇİNDEKİLER
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ PROJE : SUMO ROBOTU PROJE RAPORU AYTUĞ DOĞANER 2014010226069 AHMET UYAR 2015010226045 PROJE DANIŞMANI: PROF.DR.AHMET DEMİR 1 İÇİNDEKİLER
5.48. KALİTE KONTROL OTOMASYONU
 5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
IŞIK ĐZLEYEN ROBOT PROJESĐ LIGHT FOLLOWĐNG ROBOT PROJECT. Hasan ALTAŞ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP
 IŞIK ĐZLEYEN ROBOT PROJESĐ LIGHT FOLLOWĐNG ROBOT PROJECT Proje Yürütücüleri Hasan ALTAŞ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP Tayfun KOÇ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü,
IŞIK ĐZLEYEN ROBOT PROJESĐ LIGHT FOLLOWĐNG ROBOT PROJECT Proje Yürütücüleri Hasan ALTAŞ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP Tayfun KOÇ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü,
ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ
 ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DİŞLİ VERİMLİLİĞİNİ BELİRLEME DENEYİ FÖYÜ 2015-2016 Güz Dönemi 1.1. Deneyin Amacı DĠġLĠ VERĠMLĠLĠĞĠNĠ BELĠRLEME DENEYĠ Mevcut deney
ULUDAĞ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DİŞLİ VERİMLİLİĞİNİ BELİRLEME DENEYİ FÖYÜ 2015-2016 Güz Dönemi 1.1. Deneyin Amacı DĠġLĠ VERĠMLĠLĠĞĠNĠ BELĠRLEME DENEYĠ Mevcut deney
 GÜNEŞİ TAKİP EDEN HAREKETLİ KOLLEKTÖR MÜNİR ATAMAN BTSO Kamil Tolon Bilim Ve Sanat Merkezi Osmangazi-BURSA munirataman@hotmail.com ŞENOL YILDIZ Ekinciler 75. Yıl İlköğretim Okulu-Göynük BOLU senolyildiz5@hotmail.com
GÜNEŞİ TAKİP EDEN HAREKETLİ KOLLEKTÖR MÜNİR ATAMAN BTSO Kamil Tolon Bilim Ve Sanat Merkezi Osmangazi-BURSA munirataman@hotmail.com ŞENOL YILDIZ Ekinciler 75. Yıl İlköğretim Okulu-Göynük BOLU senolyildiz5@hotmail.com
Fizik 101-Fizik I 2013-2014. Statik Denge ve Esneklik
 1 -Fizik I 2013-2014 Statik Denge ve Esneklik Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 2 İçerik Denge Şartları Ağırlık Merkezi Statik Dengedeki Katı Cisimlere ler Katıların Esneklik Özellikleri 1
1 -Fizik I 2013-2014 Statik Denge ve Esneklik Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 2 İçerik Denge Şartları Ağırlık Merkezi Statik Dengedeki Katı Cisimlere ler Katıların Esneklik Özellikleri 1
ÜÇ-FAZ SENKRON MAKİNANIN SENKRONİZASYON İŞLEMİ VE MOTOR OLARAK ÇALIŞTIRILMASI DENEY 324-06
 ĐNÖNÜ ÜNĐERSĐTESĐ MÜHENDĐSĐK FAKÜTESĐ EEKTRĐK-EEKTRONĐK MÜH. BÖ. ÜÇ-FAZ SENKRON MAKİNANIN SENKRONİZASYON İŞEMİ E MOTOR OARAK ÇAIŞTIRIMASI DENEY 4-06. AMAÇ: Senkron jeneratörün kaynağa paralel senkronizasyonu
ĐNÖNÜ ÜNĐERSĐTESĐ MÜHENDĐSĐK FAKÜTESĐ EEKTRĐK-EEKTRONĐK MÜH. BÖ. ÜÇ-FAZ SENKRON MAKİNANIN SENKRONİZASYON İŞEMİ E MOTOR OARAK ÇAIŞTIRIMASI DENEY 4-06. AMAÇ: Senkron jeneratörün kaynağa paralel senkronizasyonu
Mikroişlemcilerde Aritmetik
 Mikroişlemcilerde Aritmetik Mikroişlemcide Matematiksel Modelleme Mikroişlemcilerde aritmetik işlemler (toplama, çıkarma, çarpma ve bölme) bu iş için tasarlanmış bütünleşik devrelerle yapılır. Bilindiği
Mikroişlemcilerde Aritmetik Mikroişlemcide Matematiksel Modelleme Mikroişlemcilerde aritmetik işlemler (toplama, çıkarma, çarpma ve bölme) bu iş için tasarlanmış bütünleşik devrelerle yapılır. Bilindiği
Birinci Seviye Robot Eğitimi Bölüm 4
 Birinci Seviye Robot Eğitimi Bölüm 4 İçerik; - LDR (Işık) modülü nedir, nası çalışır - Işık ölçüm uygulaması - Siyah-beyza algılama uygulaması - Fiber iletişim uygulaması - Yolcu sayma uygulaması - Yazılımda
Birinci Seviye Robot Eğitimi Bölüm 4 İçerik; - LDR (Işık) modülü nedir, nası çalışır - Işık ölçüm uygulaması - Siyah-beyza algılama uygulaması - Fiber iletişim uygulaması - Yolcu sayma uygulaması - Yazılımda
Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r.
 Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r. Özellikleri 5 dk gibi bir sürede kurulumu yapılabilir. Açık kaynaklı bir pla orm olan Arduino temeline
Giriş Nanobot düşük fiyatlı her yaş grubuna hitap eden bir robot ki dir. Kurulumu ve kullanımı çok basi r. Özellikleri 5 dk gibi bir sürede kurulumu yapılabilir. Açık kaynaklı bir pla orm olan Arduino temeline
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Temizlik Robotu Yetkin AKKAŞ (2015210225003) Danışman Prof. Dr. Ahmet DEMİR 2018 ÖZET Teknolojinin ilerlemesiyle birlikte insanların
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Temizlik Robotu Yetkin AKKAŞ (2015210225003) Danışman Prof. Dr. Ahmet DEMİR 2018 ÖZET Teknolojinin ilerlemesiyle birlikte insanların
Fatih University- Faculty of Engineering- Electric and Electronic Dept.
 SAYISAL DEVRE TASARIMI EEM122 Ref. Morris MANO & Michael D. CILETTI SAYISAL TASARIM 4. Baskı Fatih University- Faculty of Engineering- Electric and Electronic Dept. SAYISAL DEVRE NEDİR? Mühendisler, elektronik
SAYISAL DEVRE TASARIMI EEM122 Ref. Morris MANO & Michael D. CILETTI SAYISAL TASARIM 4. Baskı Fatih University- Faculty of Engineering- Electric and Electronic Dept. SAYISAL DEVRE NEDİR? Mühendisler, elektronik
ELE 201 DEVRE ANALİZİ I ARA SINAV 1 11 Ekim 2011, Salı,
 ELE 201 DEVRE ANALİZİ I ARA SINAV 1 11 Ekim 2011, Salı, 1230-1420 SOYADI: ADI: ÖĞRENCĠ #: ĠMZA: AÇIKLAMALAR Bu sınav toplam 17 sayfadan oluģmaktadır. Lütfen, bütün sayfaların elinizde olduğunu kontrol
ELE 201 DEVRE ANALİZİ I ARA SINAV 1 11 Ekim 2011, Salı, 1230-1420 SOYADI: ADI: ÖĞRENCĠ #: ĠMZA: AÇIKLAMALAR Bu sınav toplam 17 sayfadan oluģmaktadır. Lütfen, bütün sayfaların elinizde olduğunu kontrol
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
İşlemsel Yükselteçler
 İşlemsel Yükselteçler Bölüm 5. 5.1. Giriş İşlemsel yükselteçler aktif devre elemanlarıdır. Devrede gerilin kontrollü gerilim kaynağı gibi çalışırlar. İşlemsel yükselteçler sinyalleri toplama, çıkarma,
İşlemsel Yükselteçler Bölüm 5. 5.1. Giriş İşlemsel yükselteçler aktif devre elemanlarıdır. Devrede gerilin kontrollü gerilim kaynağı gibi çalışırlar. İşlemsel yükselteçler sinyalleri toplama, çıkarma,
OTOMATİK KONTROL 18.10.2015
 18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
DC ac. Bu sistem, güneş panellerinden ürettiği DC elektriği inventör aracılığıyla 230V AC elektriğe çevirip. akülerde depolamaktadır.
 şarj kontrol cihazı Şarj kontrolü / invertör 5*15w LED LAMBA (Günlük 6 saat) PV panel akü 1. 1 adet 100w PV paneli 2. 1 adet 100w PV montaj seti 3. 1 adet 8A Şarj regülatörü 4. 1 adet 150w modifiye sinüs
şarj kontrol cihazı Şarj kontrolü / invertör 5*15w LED LAMBA (Günlük 6 saat) PV panel akü 1. 1 adet 100w PV paneli 2. 1 adet 100w PV montaj seti 3. 1 adet 8A Şarj regülatörü 4. 1 adet 150w modifiye sinüs
Sayın Velimiz, Saatler. 1 tam gün 08:10-15:00. ½ (yarım gün) 08:10-11:00 12:00-15:00. 1 tam gün 08:10-15:00 08:10-12:45
 08:10-11:00 12:00-15:00. 1 tam gün 08:10-15:00 08:10-12:45") 20/05/15 Sayın Velimiz, Okulumuzda 11-15 Mayıs arasında düzenlediğimiz Bilişim Haftasına katılan firmalardan bazıları ile ortaokul öğrencilerimiz için ilgi çekecek konuları içeren 4 adet Crash Course adını
20/05/15 Sayın Velimiz, Okulumuzda 11-15 Mayıs arasında düzenlediğimiz Bilişim Haftasına katılan firmalardan bazıları ile ortaokul öğrencilerimiz için ilgi çekecek konuları içeren 4 adet Crash Course adını
PATĐNAJ ÖNLEME SĐSTEMĐ(ASR)
") PATĐNAJ ÖNLEME SĐSTEMĐ(ASR) Mustafa YAZICI, H. Mehmet DEMĐREL TCK Patinaj Önleme Sistemi, harekete geçme ve hızlanma sırasında döndürülen tekerleklerin patinaj yaparak dönmesini engeller. Bu şekilde ASR,
PATĐNAJ ÖNLEME SĐSTEMĐ(ASR) Mustafa YAZICI, H. Mehmet DEMĐREL TCK Patinaj Önleme Sistemi, harekete geçme ve hızlanma sırasında döndürülen tekerleklerin patinaj yaparak dönmesini engeller. Bu şekilde ASR,
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
Deney Esnasında Kullanılacak Cihaz Ve Ekipmanlar
 7 DENEY-1 (DA makinesinin tanınması, sargı direnclerinin ölçülmesi, yabancı uyartımlı şönt generatörün dış karakteristiği) Deney Esnasında Kullanılacak Cihaz Ve Ekipmanlar Deneyin tüm adımları için aşağıdaki
7 DENEY-1 (DA makinesinin tanınması, sargı direnclerinin ölçülmesi, yabancı uyartımlı şönt generatörün dış karakteristiği) Deney Esnasında Kullanılacak Cihaz Ve Ekipmanlar Deneyin tüm adımları için aşağıdaki
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
EdHokey Robotunuz 1. Sen bir yaratıcısın. meetedison.com. ( tarafından yapılmıştır.
 EdHokey Robotunuz 1 meetedison.com Sen bir yaratıcısın 1 Türkçe çevirisi ve uyarlaması STEM Makers Academy (www.stemmakers.academy) tarafından yapılmıştır. Giriş EdKitap3 'Sen bir inşaatcısın', EdKitap1
EdHokey Robotunuz 1 meetedison.com Sen bir yaratıcısın 1 Türkçe çevirisi ve uyarlaması STEM Makers Academy (www.stemmakers.academy) tarafından yapılmıştır. Giriş EdKitap3 'Sen bir inşaatcısın', EdKitap1
BÖLÜM 17 RİJİT ROTOR
 BÖLÜM 17 RİJİT ROTOR Birbirinden R sabit mesafede bulunan iki parçacığın dönmesini düşünelim. Bu iki parçacık, bir elektron ve proton (bu durumda bir hidrojen atomunu ele alıyoruz) veya iki çekirdek (bu
BÖLÜM 17 RİJİT ROTOR Birbirinden R sabit mesafede bulunan iki parçacığın dönmesini düşünelim. Bu iki parçacık, bir elektron ve proton (bu durumda bir hidrojen atomunu ele alıyoruz) veya iki çekirdek (bu
Çizgi İzleyen Robot Tasarımı
 04.08.2014 Teknoloji Fakültesi Çizgi İzleyen Robot Tasarımı Hazırlayan: Araş. Gör. Okan UYAR İçindekiler 1. Uygulamanın İçeriği... 1 2. Uygulamanın Hedefi... 1 3. Ön Bilgi... 1 3.1. Çalışma Prensibi...
04.08.2014 Teknoloji Fakültesi Çizgi İzleyen Robot Tasarımı Hazırlayan: Araş. Gör. Okan UYAR İçindekiler 1. Uygulamanın İçeriği... 1 2. Uygulamanın Hedefi... 1 3. Ön Bilgi... 1 3.1. Çalışma Prensibi...
SEYYAR BALANS MAKİNESİ KULLANIM KILAVUZU
 SEYYAR BALANS MAKİNESİ KULLANIM KILAVUZU İlk olarak makinemizin bileşenleri ile tanıtımımıza başlayalım. 1. KULLANIM PANELİ 2. STROBOSKOP 3. SENSÖR: Sensörümüz manyetik olarak çalışmaktadır ve ucu mıknatıslıdır.
SEYYAR BALANS MAKİNESİ KULLANIM KILAVUZU İlk olarak makinemizin bileşenleri ile tanıtımımıza başlayalım. 1. KULLANIM PANELİ 2. STROBOSKOP 3. SENSÖR: Sensörümüz manyetik olarak çalışmaktadır ve ucu mıknatıslıdır.
Kumanda Kolu. Güç. Yürüyüş Donanımı. Çatal Düzeneği
 WE 2300S Serisi Özellikler ve Avantajlar Kumanda Kolu X10 kumanda kolu kullanımı basitleştirerek operatör güvenliğini ve verimliliğini arttırır. Kumanda düğmelerinin dokunsal ve görsel farklılığı sağ ve
WE 2300S Serisi Özellikler ve Avantajlar Kumanda Kolu X10 kumanda kolu kullanımı basitleştirerek operatör güvenliğini ve verimliliğini arttırır. Kumanda düğmelerinin dokunsal ve görsel farklılığı sağ ve
Toplam çevrim oranının kademelere paylaştırılması
 Toplam çevrim oranının kademelere paylaştırılması Normalde alın dişli çarklarda bir kademe çevrim oranının 8 den küçük olması önerilir. Bu nedenle toplam çevrim oranınız 40-45 ten küçük ise mekanizmanızı
Toplam çevrim oranının kademelere paylaştırılması Normalde alın dişli çarklarda bir kademe çevrim oranının 8 den küçük olması önerilir. Bu nedenle toplam çevrim oranınız 40-45 ten küçük ise mekanizmanızı
SATIŞLARIMIZ JENERATÖRLER EMSA JENERATÖR
 SATIŞLARIMIZ JENERATÖRLER EMSA JENERATÖR KARJEN JENERATÖR KARJEN Jeneratör çoğu firma için basit gibi görünse de önemli bir yatırımdır aynı zamanda. O yüzden jeneratör alirken firma seçimine çok dikkat
SATIŞLARIMIZ JENERATÖRLER EMSA JENERATÖR KARJEN JENERATÖR KARJEN Jeneratör çoğu firma için basit gibi görünse de önemli bir yatırımdır aynı zamanda. O yüzden jeneratör alirken firma seçimine çok dikkat
Basınç farkı=çalışma basıncı (PA,B)-Şarj basıncı (PSp)+Güvenlik payı Ayar Diyagramı
-Şarj basıncı (PSp)+Güvenlik payı Ayar Diyagramı") 1 Pistonlu pompa ve motorlarla sağlanacak hidrostatik tahrik aracın sürüşünde birçok avantaj getirmektedir. İyi bir sürüş konforu ve yüksek çalışma hızı yönündeki talepler hidrostatik tahrikle çalışan
1 Pistonlu pompa ve motorlarla sağlanacak hidrostatik tahrik aracın sürüşünde birçok avantaj getirmektedir. İyi bir sürüş konforu ve yüksek çalışma hızı yönündeki talepler hidrostatik tahrikle çalışan
MİKROTEST ŞİRKETLER GRUBU;
 MİKROTEST ŞİRKETLER GRUBU; Kuruluşundan Bugüne Öncelikli Hedefi; Trend İzleyen Değil,Belirleyen Olabilmek Ve Farkli Olani Sunabilmektir.Amaci İse Gerçek Anlamda Güç,Düşünce Ve Hedef Birliği Üzerine Kurulmuştur.
MİKROTEST ŞİRKETLER GRUBU; Kuruluşundan Bugüne Öncelikli Hedefi; Trend İzleyen Değil,Belirleyen Olabilmek Ve Farkli Olani Sunabilmektir.Amaci İse Gerçek Anlamda Güç,Düşünce Ve Hedef Birliği Üzerine Kurulmuştur.
SU DALGALARINDA GİRİŞİM
 SU DALGALARINDA GİRİŞİM Yukarıda iki kaynağın oluşturduğu dairesel su dalgalarının meydana getirdiği girişim deseni gösterilmiştir Burada kesikli çizgiler dalga çukurlarını, düz çizgiler dalga tepelerini
SU DALGALARINDA GİRİŞİM Yukarıda iki kaynağın oluşturduğu dairesel su dalgalarının meydana getirdiği girişim deseni gösterilmiştir Burada kesikli çizgiler dalga çukurlarını, düz çizgiler dalga tepelerini
Bir motorun iç yapısı çok farklı gözükse bile, motorun uç davranışını bu iki türün birisi cinsinden tanımlamak her zaman mümkündür.
 K TÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemciler Laboratuarı ADIM MOTORUNUN MĐKROBĐLGĐSAYARLARLA DENETĐMĐ 1. GENEL TANITIM Adım motorları, küçük momentli sayısal uygulamalarda
K TÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemciler Laboratuarı ADIM MOTORUNUN MĐKROBĐLGĐSAYARLARLA DENETĐMĐ 1. GENEL TANITIM Adım motorları, küçük momentli sayısal uygulamalarda
F AKIM DEVRELER A. DEVRE ELEMANLARI VE TEMEL DEVRELER
 ALTERNATİF AKIM DEVRELERİ A. DEVRE ELEMANLARI VE TEMEL DEVRELER Alternatif akım devrelerinde akımın geçişine karşı üç çeşit direnç (zorluk) gösterilir. Devre elamanları dediğimiz bu dirençler: () R omik
ALTERNATİF AKIM DEVRELERİ A. DEVRE ELEMANLARI VE TEMEL DEVRELER Alternatif akım devrelerinde akımın geçişine karşı üç çeşit direnç (zorluk) gösterilir. Devre elamanları dediğimiz bu dirençler: () R omik
326 ELEKTRİK MAKİNALARI LABORATUVARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 326-04
 MOTOR DENEY 326-04") İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU KİNEMATİK DİYAGRAM 2 Kinematik Diyagram, mekanizmaların uzuvlarını şekil ve ölçülerinden ziyade şematik olarak göstermeyi ve uzuvların mafsallarla bağlanabilirliğini
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU KİNEMATİK DİYAGRAM 2 Kinematik Diyagram, mekanizmaların uzuvlarını şekil ve ölçülerinden ziyade şematik olarak göstermeyi ve uzuvların mafsallarla bağlanabilirliğini
APPLE BİLGİSAYARI İCAT EDEN TEKNİSYEN: STEVE WOZNIAK
 APPLE BİLGİSAYARI İCAT EDEN TEKNİSYEN: STEVE WOZNIAK Steve Wozniak, hesap makinası üreten bir firmada teknisyendi. Tek başına, 1976 da Apple-I ve 1977 de Apple-II bilgisayarlarını icat etti ve satış rekorları
APPLE BİLGİSAYARI İCAT EDEN TEKNİSYEN: STEVE WOZNIAK Steve Wozniak, hesap makinası üreten bir firmada teknisyendi. Tek başına, 1976 da Apple-I ve 1977 de Apple-II bilgisayarlarını icat etti ve satış rekorları
Masaüstü Bilgisayarlar
 Bilgisayar Nedir? Girilen bilgileri alan işleyen, istenildiği takdirde saklayan veya kullanıcıya sunan çok maksatlı programlanabilen elektronik bir makinedir. Bilgisayar Nedir? İnsan beyni bilgi toplama,
Bilgisayar Nedir? Girilen bilgileri alan işleyen, istenildiği takdirde saklayan veya kullanıcıya sunan çok maksatlı programlanabilen elektronik bir makinedir. Bilgisayar Nedir? İnsan beyni bilgi toplama,
TRİFAZE VOLTAJ REGÜLATÖRLERİ
 TRİFAZE VOLTAJ REGÜLATÖRLERİ Trifaze mikro-işlemci kontrollü voltaj regülatörlerimiz 10,5 kva ile 2000 kva güç değerleri arasında standart veya korumalı olarak üretilmektedir. Regülatörlerimiz dengelenmiş
TRİFAZE VOLTAJ REGÜLATÖRLERİ Trifaze mikro-işlemci kontrollü voltaj regülatörlerimiz 10,5 kva ile 2000 kva güç değerleri arasında standart veya korumalı olarak üretilmektedir. Regülatörlerimiz dengelenmiş
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU
 PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: dogan@neu.edu.tr Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: dogan@neu.edu.tr Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
İçerik. Ürün no.: MLD500-T1L Güvenlik tek ışın fotoelektrik sensör verici
 Ürün no.: 66502000 MLD500-T1L Güvenlik tek ışın fotoelektrik sensör verici Şekil farklılık gösterebilir İçerik Teknik veriler Uygun alıcı Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge
Ürün no.: 66502000 MLD500-T1L Güvenlik tek ışın fotoelektrik sensör verici Şekil farklılık gösterebilir İçerik Teknik veriler Uygun alıcı Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge
ROKART VER 3.1 AYRINTILI MONTAJ KILAVUZU MALZEME LİSTESİ. DEVRENİN MONTAJINDA KULLANILAN ARAÇLAR Lehim teli 25 40 watt havya Yankeski Maket bıçağı
 ROKART VER 3.1 AYRINTILI MONTAJ KILAVUZU MALZEME LİSTESİ 16F628A L293D 7805 16 pin dip soket 18 pin dip soket Tek sıra erkek soket (Header) Kırmızı led Minik sarı ledler x 2 Minik yeşil ledler x 2 2 li
ROKART VER 3.1 AYRINTILI MONTAJ KILAVUZU MALZEME LİSTESİ 16F628A L293D 7805 16 pin dip soket 18 pin dip soket Tek sıra erkek soket (Header) Kırmızı led Minik sarı ledler x 2 Minik yeşil ledler x 2 2 li
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ
 5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
Yükseltici DA Kıyıcılar, Gerilim beslemeli invertörler / 12. Hafta
 E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki