T.C KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ AKILLI KAHVALTI TABAĞI
|
|
|
- Meryem Aydan
- 8 yıl önce
- İzleme sayısı:
Transkript
1 T.C KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ AKILLI KAHVALTI TABAĞI BİTİRME ÇALIŞMASI SAMET YILANCI TRABZON 2011

2 T.C KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ AKILLI KAHVALTI TABAĞI BİTİRME ÇALIŞMASI SAMET YILANCI PROF. DR. İ. HAKKI ALTAŞ TRABZON 2011

3 ÖNSÖZ Bu projenin ilk taslaklarının hazırlanmasında emeği geçenlere, projenin son halinin almasında yol gösterici olan Sayın hocam Prof. Dr. Ġsmail Hakkı ALTAġ a, bu çalıģmada bana yardımcı olan Elektrik-Elektronik Mühendisliği Bölümü öğrencilerinden değerli arkadaģlarım Zafer SATILMIġ ve Cevat AĞIRMAN a en içten teģekkürlerimi sunarım. Ayrıca eğitimim süresince bana her konuda tam destek veren aileme ve bana hayatlarıyla örnek olan tüm hocalarıma saygı ve sevgilerimi sunarım. Samet YILANCI TRABZON, 2011 II

4 İÇİNDEKİLER Sayfa No ÖNSÖZ... II ĠÇĠNDEKĠLER... III ÖZET... V 1. GĠRĠġ Projede Kullanılan Malzemeler Step Motor GiriĢ Step motorların Kullanım Alanları Step Motorların Avantajları Step Motorların Dezavantajları Step Motor Yapısı Step Motor ÇalıĢma Prensibi Step Motorların Uçlarının Bulunması Step Motor Kontrolü ULN2003A Entegresi CNY 70 Sensör PIC16F628A Mikrodenetleyicisi Bellek Organizasyonu Besleme Uçları Ve Bağlantıları Osilatör Konfigürasyonları Sıfırlama GiriĢ / ÇıkıĢ ( I / O) Portları Port A III
 Portları... 14 1.1.4.5.1. Port A... 15 III")
5 Port B Kesmeler Dirençler Mercimek Kapasite Kristal Osilatör DC Güç Kaynağı Breadboard SĠSTEM TASARIMI GiriĢ Sistemin Modellenmesi Sistemin ÇalıĢma Prensibi GELĠġTĠRĠLEBĠLĠRLER SONUÇLAR KAYNAKLAR IV

6 ÖZET Projedeki yapılıģ amacı akıllı bir kahvaltı tabağı yapmaktı. Büyük otellerde ve büyük iģletmelerde kullanılmak üzere yapılabilecek bir uygulama özelliklerde açık büfe menülerde büyük kullanım kolaylığı sağlayacaktır. AnlaĢılması açısından örnek vermek gerekirse bir iģletmede sabah kahvaltısında büyük bir masanın etrafında yemek alacak kiģilerin masanın etrafını dolaģmadan istediği yönde istediği yemeği alabilmesidir. Uygulamada yapılabilirliği için daha küçük bir proje hazırlanmıģtır. Yapılan uygulamada tek katlı bir kontrol mekanizması yapılmıģtır. Daha da kullanılabilir olması açısından iki,üç veya dört katlı bir mekanizma düģünülebilir. V

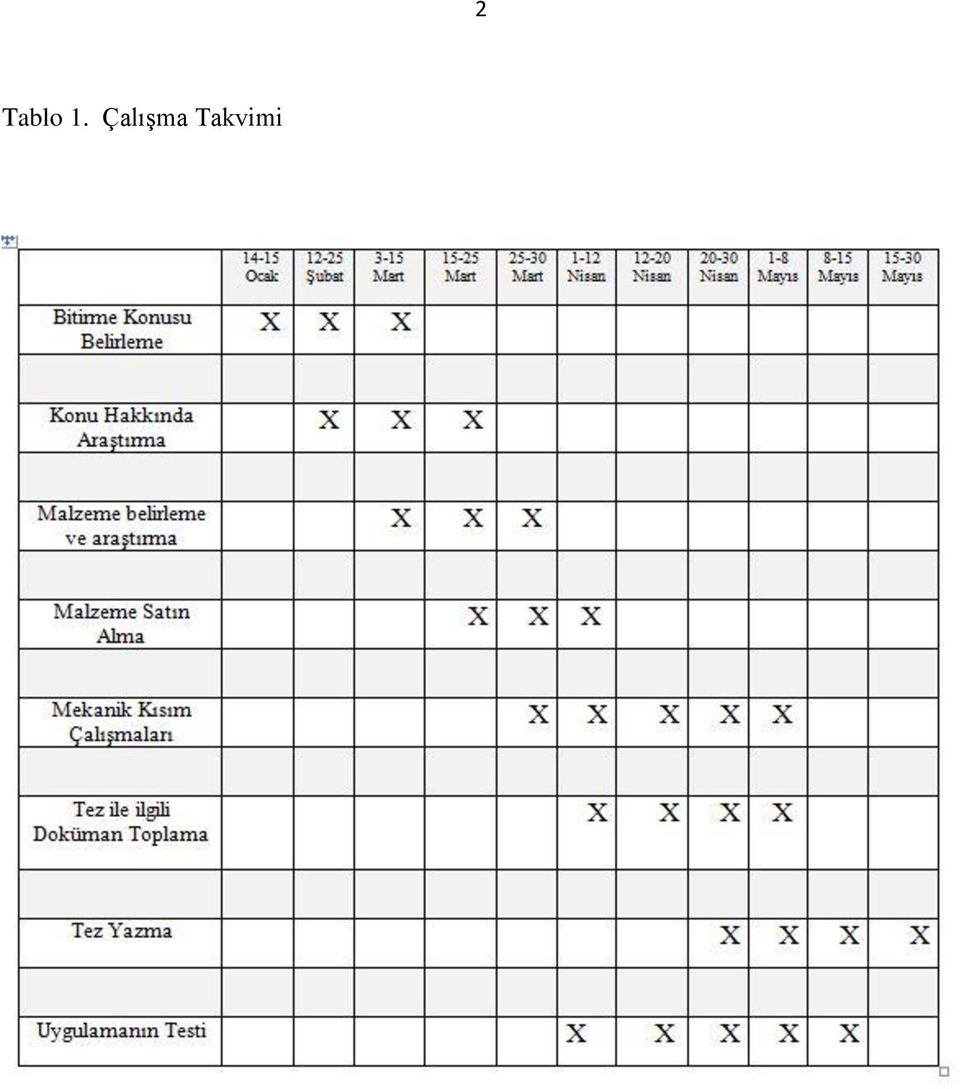
7 1 1. GİRİŞ Projede günlük hayatta rahatlıkla kullanılabilecek olan bir kahvaltı tabağı yapılmıştır. Burada bir masanın etrafındaki kişiler masanın etrafını dolaşmadan istediği yönde istediği yiyeceği alabimesi amaçlanmıştır. Bunun için kahvaltı tabağı 4 e bölünüp bu 4 dilimi temsilen masanın her bi tarafına 4 buton konulmuştur. Masanın herhangi bi köşesinde olan kişi istediği yiyeceği o yiyeceğin isminin yazılı olduğu butona basıp önüne çağırarak o yiyeceği alabilecektir. Kahvaltı tabağı olarak kullanılacak olan diskin dönüşünü sağlamak için step motor kullanılmıştır. Step motor kullanılmasının amacı hassas bir şekilde konum ve hız kontrolü yapmak içindir. Step motora ilk enerji verildiğinde tabağın referans noktasını bulması içinde CNY 70 sensör kullanılmıştır. Ayrıca projede kullanılan diğer devre elemanlarıda aşağıda tanıtılmıştır. Projenin tasarımı, modellenmesi ve diğer izlenen yollar aşağıda Tablo 1. deki çalışma takviminde belirtilmiştir.

8 Tablo 1. Çalışma Takvimi 2
9 Projede Kullanılan Malzemeler Projenin yapım aşamasında kullanılan malzemeler aşağıdaki Tablo 1.1. de gösterilmiştir. Bu malzemelerin neden ve nerde kullanıldığı aşağıda açıklanmıştır. Tablo 1.1. Projede Kullanılan malzemeler 1 adet Step motor 1 adet ULN2003A entegresi 1 adet 22 pf lık mercimek kapasite 7 adet 10 kω luk direnç 1 adet 220 Ω luk direnç 1 adet CNY70 sensör 16 adet Push buton 1 adet 4 Mhz kristal osilatör 3 adet LED 1 adet DC güç kaynağı 1 tane PIC 16F628A mikrodenetleyicisi 1 tane Breadboard Step Motor Giriş Step motorlar konum ve hareketin hassas olarak kontrol edilmesi gereken yerlerde kullanılan özel motorlar olduğundan dolayı projede kullanılan motorun türü Şekil de gösterilen step motordur. Step motorların diğer elektrik motorlarından en büyük farkı bir elektrik motoruna enerji verildiği zaman rotoru sürekli olarak döner. Eğer motora uygulanan enerji kesilirse dönme olayı son bulur. Hâlbuki step motorlarda, rotorun dönmesi girişe uygulanan uyartı sayısına

10 4 göre değişir. Girişe bir tek uyartı verildiğinde, rotor tek bir adım hareket eder ve durur. Daha fazla uyartı uygulanırsa, uyartı sayısı kadar adım hareket eder. [1] İsminden de anlaşılacağı gibi step motorları, motorun sargılarından uygun olan birisine gerilim uygulanarak kontrol edilirler. Motorun yapısına bağlı olarak, step motor 90, 45, 18, 7,5, 1,8 derece veya daha değişik açı aralıklarıyla dönebilir. Projede kullanılan step motor 7,5 derece açı aralıklarıyla dönmektedir. Darbe oranı değiştirilerek step motorun bir adımlık hareketi çok yavaşlatılacağı gibi daha da hızlandırılabilir. Örnek vermek gerekirse projede kullanılacak olan step motorun adım açısı 7,5 derece idi bu motoru 90 derece döndürebilmemiz için motora 12 adım attırmamız gereklidir. Step motorları saat yönünde veya tersi yönde dönebilirler. Bunun için faz sargılarına uygulanan gerilimlerin sırası değiştirilir. Yapılan uygulamada kahvaltı tabağının dönüş yönü hem saat yönü hemde tersi yönde döneceği için step motor projede çok büyük kolaylık sağlamıştır. Step motorlarının hangi yöne doğru döneceği, devir sayısı, dönüş hızı gibi değerler mikroişlemci veya bilgisayar yardımı ile kontrol edilebilir. Projede PIC 16F628A mikroişlemcisi kullanılarak step motor kontrol edilecektir.sonuç olarak adım motorlarının hızı, dönüş yönü ve konumu her zaman bilinmektedir. Bu özelliklerinden dolayı projede Şekil de görülen step motor kullanılacaktır. Şekil Projede kullanılan step motor

11 Step motorların Kullanım Alanları Step motorlar çok uzun yıllardır var olmalarına rağmen seri üretim olarak kullanılmaları ancak 1960 dan sonraki yıllarda doğru akımla birlikte anahtarlama yapabilen transistörlerin üretilmesiyle yaygınlaşmıştır. Daha sonra 1970 li yıllardan beri özellikle elektronikte ve mikroişlemci teknolojisindeki gelişmelerle birlikte step motorlarının kullanımı dahada artmıştır. Günümüzde step motorları endüstride birçok kontrol sistemlerinde, özellikle konum kontrolünde kullanılmaktadır. En çok yazıcılar, çiziciler, disket sürücüler, harddisk sürücüler, kart okuyucular v.b. gibi bilgisayar donanımlarında step motorlardan yararlanılmaktadır. Ayrıca kontrol sistemlerinde, CNC tezgahlar gibi bir çok sistemde step motorlar kullanılmaktadır Step Motorların Avantajları Step motorların yukarıda anlatılan avantajlarını sıralanırsa; Step motorlar dijital giriş işaretlerine hızlı bir şekilde cevap vermeleri nedeniyle mikroişlemci veya bilgisayarlarla kontrol için en ideal motor türlerinden biridir. Step motorların hangi yöne döneceği, devir sayısı, dönüş hızı gibi değerlerin mikroişlemci veya bilgisayar yardımı ile kontrol edilebilmesi, her an bu motorların dönüş yönü, hızı ve konumunun bilinebilmesini sağlamaktadır. Bu da step motorları hassas konum kontrolü gerektiren yerlerde kullanılmasını sağlar. Step motorların dijital girişlere cevap vermesi, geri beslemeye ihtiyaç duyulmaksızın açık çevrim çalıştırılabilmesini sağlamaktadır. Yani açık çevrim çalıştırılan bir step motoru ile hız, ivme ve konum kontrolü daha basit ve daha az maliyetle gerçekleştirilebilir. Böylece alışılmış kararsızlık problemlerinin de önüne geçilmiş olur. Step motorlar, giriş işaretlerinin frekansına bağlı olarak çok geniş bir hız aralığında rahatlıkla sürülebilirler. Step motorlar, herhangi bir konum ve hız kaybına yol açmadan defalarca durdurulup çalıştırılabilirler. (Sürerken aniden durdurma ya da aniden ters yönde sürme isteğine karşı mükemmel cevap verebilirler.)

12 6 Aşırı yüklenmeden hasar görmezler, oldukça dayanıklıdırlar. Her yeni adımla artan konum hataları yoktur. Mekanik yapısı basit olduğundan bakım gerektirmezler. Yağlanma ve kirlenme problemleri yoktur Step Motorların Dezavantajları Step motorların bir çok avantajı olmasına rağmen bazı dezavantajları vardır.bunları sıralarsak; Adım açıları sabit yani 7,5, 9, 15 derece gibi olduğundan rotordan alınan hareket sürekli değil gelen darbe süresi kadardır. Verimleri düşüktür. Adım cevapları diğer motorlara göre büyük aşım ve salınımlıdır. Büyük yük sürülmesi gereken yerlerde kullanım alanları sınırlıdır. Sürtünme kaynaklı yüklerde konum hatası meydana getirebilirler. Elde edilebilecek çıkış gücü ve momenti belli aralıklardadır. Kontrol iyi edilmezse salınım meydana gelebilir. Yüksek hızlarda çalıştırmak kolay değildir Step Motor Yapısı Step motorun statorunun aşağıdaki Şekil te görüldüğü gibi birçok kutbu vardır. Bunların polaritesi elektronik anahtarlar yardımıyla değiştirilebilir. Anahtarlama sonucunda statorun ortalama güney ve kuzey kutupları döndürülmektedir. Rotorun güney kutbu, statorun kuzey kutbu sıralıdır.rotorun mıknatıslığı, bir sürekli mıknatıs veya dış uyarım metotlarıyla oluşturulabilir. Bu arada sürekli mıknatıs oluşacaktır. Adımları vasıtasıyla ortalama stator alanı döner ve rotor da bunu benzer adımlar arasında takip eder.

13 7 Daha iyi bir seçicilik elde etmek için rotor ve stator üzerine küçük dişler yapılmaktadır. Bu dişler birbirleriyle temas etmemelidir. Şekil Step motor yapıları ( Stator ve rotorları tek parça ve üzerine yapılmış dişlilerden oluşan motorlar) [1] Step Motor Çalışma Prensibi Step motorlar bir dizi kısa elektrik akımıyla hareket ederler. Stator birbirine dik manyetik alan üreten iki ayrı bobinden oluşur. Bu bobinlere sırayla elektrik akımı verilerek statorun içerisinde döndürme etkisine sahip bir manyetik alan oluşması sağlanır. Statorun içindeki rotor bobinler tarafından sırayla oluşturulan manyetik alanla polarize olarak döner. Her bir elektrik akım vurgusu yani darbe rotorun belli bir açı kadar veya adım dönmesine neden olur. Eğer güç sadece bir bobine verilirse manyetik alanın etkisiyle rotor sabitlenecektir, bu da motorun durdurulmasında kullanılır. Şekil da bir step motorun temel prensip şeması verilmiştir. Step motor bir daire içinde elektromagnetik alanların dönüşü ile ifade edilebilir. Şekil da görülen 1 nolu anahtar kapandığında (SW 1) rotor kendiliğinden 1. elektromanyetik alan ile aynı hizaya gelecektir. Bundan sonra 1 nolu anahtar açılıp 2 nolu anahtar kapatılırsa sabit mıknatıs 2. elektromagnetik alanın karşısına gelecektir. Bu olaylar sırayla tekrarlanırsa rotor bir daire içinde düzgün şekilde döner. Bu şekilde verilen elektrik akım vurgularının frekansı

14 8 motorun dönme hızını belirler. Hızlı ivmelenme sonucunda step motorda kayma meydana gelebilir bunun önlenmesi için ivmelenme sırasında vurgu sıklığı ayarlanmalıdır. Şekil Step motor çalışma prensip şeması [1] Step Motorların Uçlarının Bulunması Step motorlarda uçları ya kataloğuna bakılarak ya da basit metotlarla bulunulabilir. Örneğin Şekil de gösterildiği gibi 4 uçlu bir step motorda uçların bulunması şu şekilde olur. Bir ölçü aleti ile uçlar arasında direnç ölçümü yapılırsa ohmmetreden sadece A - B arasında ya da C - D arasında bir direnç değeri okunabilir. A - C, A D ya da B C, B D uçarının birbirleri ile bağlantıları olmadığı için ohmmetrede hiç bir değer okunamaz ya da sonsuz direnç değeri gösterir. Bu yol vasıtasıyla hangi uçların birbiri ile bağlantılı olduğunu yani motor bobinlerinin karşılıklı uçları belirlenebilir. Eğer motorun 6 ucu varsa, bu kez yine bir ölçü aleti yardımıyla uçlar arasında direnç ölçümü yapılarak hangi üç ucun birbiri ile bağlantılı olduğu bulunulabilir. Şekil de O1 ve O2 ortak uçlardır. Dolayısıyla A B arasında ölçülen direnç A - O1 ya da B O1 arasında ölçülen direncin 2 katıdır. Aynı şekilde C D arasında ölçülen direnç C O2 ya da D O2 arasında ölçülen direncin 2 katıdır.bu şekilde step motorun uçları belirlenebilir.

15 9 Şekil ve 6 uçlu step motor yapısı Step Motor Kontrolü Step motorların uçları belirlendikten sonra kontrol edilmesi için step motorun kablolarindan ortak olan bir veya iki tane kablosuna sürekli +12 Volt göndermek ve diger uçlari ise belli bir sirada topraga göndererek bir adim hareketi elde etmektir. Bunu iki farkli sekilde yapabiliriz. Bunlardan bir tanesi 4 transistörlü bir devre ile bu sinyalleri göndermek. Bir diger yolu ise içerisinde bu transistörleri hali hazirda bulunduran bir entegre kullanmaktır.bu entegrenin adı ULN2003A entegresidir ULN2003A Entegresi ULN2003 entegreleri ise PIC ten gelen sürüş bilgisini, yani bit kaydırmasını 12 DC volta yükselterek step motorlarına vermektedir. Eğer ULN2003 kullanılmaz ise PIC ten gelen 3-5 DC voltluk gerilim ve düşük akım step motorları süremeyecektir, sürse bile sistem için gereken torku sağlayamayacaktır. Bu sebeple ULN2003 entegre devresi kullanma ihtiyacı doğmaktadır. Şekil de gösterilen ULN2003A entegresi içerisinde 7 adet NPN transistor ve dâhili diyot bulunmaktadır. Bu entegre ile 500mA kadar akım çeken motorlar çalıştırılabilir. +12V a kadar entegreye besleme gerilimi verilebilir.

16 10 Şekil ULN2003A entegresi CNY 70 Sensör Projede Şekil de görülen CNY 70 sensörü step motorun süreceği diskin referans noktasını bulmak için kullanılmıştır. CNY 70 sensörü kızılötesi (IR) ışık yayan ve bu ışığı geri alıp alamamasına göre analog çıkış veren ve önünde yansıtıcı (beyaz) bir yüzey olup olmadığına karar vermemize yarayan bir algılayıcıdır. Çalışma mantığı ışığın yansıması esasına dayanır. Eğer CNY 70 den gönderilen ışık beyaz bir yüzeye çarpıp geri dönerse sensörün çıkış bacağından 0V (lojik 0) gönderilir. Eğer önünde siyah bir yüzey varsa ışık soğurulur ve geri yansımaz, bu durumda sensörün çıkış bacağına 5V (lojik 1) gönderilir. Bunu sensörün içerisindeki transistör sağlar, ışık yansırsa yani sensör beyaz görürse transistorün beyz kısmına yüksek akım gelir ve emetörü toprağa bağlı olduğu için kolektördeki akım toprağa akar ve çıkış ayağındaki potansiyel sıfırlanır. Siyah gördüğünde ise transistör devreye girmez ve çıkış gerilimi yaklaşık olarak 5 volt olarak kalır. Teorik olarak böyle olsa da hayata geçirildiğinde alınan voltaj değerleri 0V-45V arasında olsada bazen kullandıgımız mikrodenetleyici (PIC) bunu bunu algılamayabilir.bunu engellemek için ise LM324 adı verilen ve CNY 70 den gelen sinyali düzelten bir entegre kullanılır.
 gönderilir.")
17 11 Şekil CNY 70 sensör PIC16F628A Mikrodenetleyicisi PIC ismi Mikrochip firmasının ürettiği mikrodenetleyicilere verdiği isimdir. Mikrochip firması çeşitli özellikte ve tasarımda onlarca değişik tip denetleyici üretmektedir. Üretilen bu mikrodenetleyiciler, denetleyicinin kelime boyuna (Word Length) göre değişik aile isimlerine ayrılmıştır. Mikrochip firmasının 8 bitlik, 16 bitlik ve 32 bitlik denetleyicileri ile 16 bitlik DSC (Digital Signal Controller) ürünleri mevcuttur.8 bitlik mikrodenetleyiciler ucuz fakat işlem yetenekleri düşük, 32 bitlik olanlar ise pahalı ancak işlem yetenekleri yüksektir. Biz sistemimizde piyasada çok rahat olarak bulunan ve içinde ihtiyaç duyulan çoğu özelliği barındıran Şekil 1.4 te görülen 8 bitlik PIC16F628A ürünü üzerinde programlama yapılacaktır. [2] Şekil PIC16F628A mikrodenetleyicisi
 ürünleri mevcuttur.")
18 Bellek Organizasyonu PICI6F628 in 2k boyutunda program belleği vardır. Bu bellekteki her bir göz 14-bit uzunluğundadır. Bu gözlerin uzunluğu ve içindeki veriler programcıyı doğrudan ilgilendirmemektedir. Şekil de PIC 16F628 in program belleği haritası gösterilmiştir. PIC16F628 in RAM bölgesinin 4 parçaya ayrıldığından ve bu 4 RAM bölgesinde genel amaçlı saklayıcılar ve özel amaçlı saklayıcılar bulunmaktadır. Her bir RAM bölgesinin ilk 32 byte lık kısmı özel amaçlı saklayıcılar tarafından kullanılmaktadır. Genel amaçlı saklayıcılar için ise 224 byte lık bir alan ayrılmıştır. Bu saklayıcılarda program yazarken kullanılan değişkenler tutulur. Şekil RAM veri belleği haritası [2]

19 Besleme Uçları Ve Bağlantıları PIC16F628 nın besleme uçları ve bağlantıları Şekil de görülmektedir. PIC16F628 in besleme gerilimi V arasında seçilebilir. PIC16F628 in beslemesi Şekil de görüldüğü gibi VDD ve VSS uçlarından verilmektedir. Besleme gerilimi 14 numaralı uç olan VDD nin + beslemeye, 4 numaralı uç olan VSS ise toprağa bağlanması gerekir. Şekil PIC 16F628A çıkış bacakları [2] PIC e besleme gerilimini sağlayan gerilim kaynağı ilk açıldığında besleme gerilimindeki dalgalanmaları ve yüksek akım çeken devre elemanlarının devreye girip çıkması ile besleme gerilimindeki ani ve istenmeyen değişimleri engellemek için VSS ile VDD uçları arasına bir kondansatör bağlanmalıdır. Böylece PIC in istenmeyen şekilde resetlenmesi engellenmiş olur Osilatör Konfigürasyonları PIC hafızasındaki komutları işlemek için bir sinyale ihtiyaç duyar. Bu sinyale clock sinyali yani saat sinyali denir. PIC16F628A işlemleri gerçekleştirmesi için gerekli olan saat işaretleri birçok farklı devre ile elde edilebilir. Projede kararlılığı en yüksek olan kristal osilatör kullanılmıştır. Mikroişlemcilerin program kodlarını çalıştırma süresi saat işaretine bağlıdır. Yüksek saat işareti hızında çalışan bir mikroişlemci aynı sürede saat işareti hızı düşük olan bir mikroişlemciye göre daha fazla komutu işler. Örneğin 3 GHz de çalışan bir işlemci 1 GHz de çalışan aynı işlemciye göre 3 kat daha hızlı komut işler.

20 14 PIC16F628 en fazla 20 MHz saat işaretinde düzgün çalışabilir. Saat işareti farklı yollarla elde edilebilir; LP (Low Power Crystal) : Düşük güçlü kristal XT (Crystal/Resonator) : Kristal/rezonatör RS (High Speed Crystal/Resonator) : Yüksek hızlı kristal/rezonatör ER (External Resistor) Harici direnç (2 çalışma biçimi) INTRC (Internal Resistor/Capacitor) : Dahili RC (2 çalışma biçimi) EC (External Clock In) : Harici Saat Girişi LP, XT veya RS tipi osilatörler OSCI ve OSC2 uçlarına bağlanırlar Sıfırlama (Reset) PIC16F628 i donanımsal olarak resetlemenin iki yolu vardır. Bunlardan ilki, besleme verildiğinde PIC in kendini resetlemesi ve reset komutuna giderek program kodlarını çalıştırması şeklinde olur. İkincisi ise donanım resetidir. PIC 16F628A nın 4 nolu pini olan MCLR ucunun 0 a çekilmesi ile gerçekleşir Giriş / Çıkış ( I / O) Portları PIC16F628, A portu ve B portu olmak üzere 8 uçlu iki porta sahiptir. B portunun her bir ucu ayrı ayrı giriş/çıkış olarak ayarlanabilirken, A portunun RA5/ ucu hariç diğer uçları ayrı ayrı giriş/çıkış olarak ayarlanabilmektedir. Bu uç sadece giriş olarak düzenlenebilir. Diğer PIC lerde olduğu gibi, az sayıdaki uçların etkin kullanımı için bazı uçların birden fazla kullanım özelliği vardır. Böylece fazladan uç kullanımına gerek kalmadan birçok özellik kullanılabilmektedir.
 PIC16F628 i donanımsal olarak resetlemenin iki yolu vardır.")
21 Port A Port A 8-bit uzunluğundadır. Tablo de Port A nın uçları ile ilgili açıklamalar görülmektedir. Tablo Port A uçları hakkında açıklamalar [2] Uç adı Uç no IO tipi Açıklama RA0/AN0 17 IO İki yönlü I/O ucu ve analog karşılaştırıcı girişi RA1/AN1 18 IO İki yönlü I/O ucu ve analog karşılaştırıcı girişi RA2/AN2/VREF 1 IO İki yönlü I/O ucu ve analog karşılaştırıcı girişi ve VREF çıkışı RA3/AN3/CMP1 2 IO İki yönlü I/O ucu ve analog karşılaştırıcı girişi ve analog karşılaştırıcı çıkışı RA4/TOCKI/CMP2 3 IO İki yönlü I/O ucu, TMR0 saat işareti girişi ve analog karşılaştırıcı çıkışı RA5/ THV 4 I Giriş ucu ve reset girişi RA6/OSC2/CLKOUT 17 IO İki yönlü I/O ucu ve kristal osilatör çıkışı RA7/OSC1/CLKIN 18 IO İki yönlü I/O ucu, kristal osilatör girişi ve harici saat kaynağı girişi
22 Port B Port B 8-bit uzunluğundadır. Tablo de Port B nin uçları ile ilgili açıklamalar görülmektedir. Tablo Port B uçları hakkında açıklamalar [2] Uç adı Uç no IO tipi Açıklama RB0/INT 6 IO İki yönlü I/O ucu ve harici kesme girişi RB1/RX/DT 7 IO İki yönlü I/O ucu, USART alıcı ucu ve senkron veri giriş/çıkış ucu RB2/TX/CK 8 IO İki yönlü I/O ucu, USART verici ucu ve senkron saat darbesi giriş/çıkış ucu RB3/CCP1 9 IO İki yönlü I/O ucu, yakala karşılaştır PWM modülü giriş/çıkış ucu RB4/PGM 10 IO İki yönlü I/O ucu, düşük gerilimle programlama giriş ucu RB5 11 IO İki yönlü I/O ucu RB6/T1OSO/T1CK1 12 IO İki yönlü I/O ucu, TIMER1 osilatör çıkış ve TIMER1 saat darbesi girişi RB7/T1OSI 13 IO İki yönlü I/O ucu ve TIMER1 osilatör girişi
23 Kesmeler Mikrodenetleyicinin rutin olarak yaptığı işler dışında bazı özel durumlar oluştuğunda, rutin işlerini bırakıp bu özel durumla ilgili görevleri yerine getirmesi gerekir. Burada bahsedilen, özel durumun oluşup oluşmadığının sürekli kontrol edilmesi yerine, kesme kullanılarak özel durumun oluştuğu mikrodenetleyiciye otomatik olarak bildirilir ve böylece gereksiz kontrollerden kurtulunur. Burada bahsedilen özel durum öncelikli bir görev olabileceği gibi, nadiren yapılması gereken bir görev de olabilir. Örneğin PIC16F628 ile bir sıcaklık kontrolü yapıldığını düşünelim. Ortam sıcaklığı belirli bir değerin (ayar noktasının) üstüne çıktığında klima devreye sokulsun. Ayar noktası iki butonla kontrol edilsin. Sistem sıcaklığı ölçüp ayar noktasına göre klimayı kapatıp açmaktadır. Ayar noktasının değiştirilmesi işlemi nadiren yapılacağından bu işlem kesme ile yapılabilir. Böylece bu butonların sürekli olarak kontrolüne gerek kalmaz. Sadece butonlara basıldığında ayar noktasının değeri kesme hizmet programı ile değiştirilir ve sistem ana programa dönerek rutin sıcaklık kontrolü işlemine devam eder Dirençler Projede kullanılan dirençler PIC 16F628A mikrodenetleyici, CNY 70 sensor, ULN2003A entegresi, ledler ve butonların devreye yerleştirilirken kullanılmıştır. Dirençler devrede mikrodenetleyici, sensör ve entegrenin bacaklarının çekeceği akımları sınırlamak için kullanılmıştır. Kullanılan dirençlerin değerleri 10 kω, 1 kω, Ω değerleri arasında değişmektedir. Çoğu dirençler bir tarafında üç renkli bir band ve diğer tarafında ise tek renkli bir banda sahiptir. Bu üç bitişik renk direncin değeri hakkında bilgi verir. Bu üçlü gruptan direnç bacağına enyakın renk 1. Sayıyı oluşturur. Örneğin bu rengin kahverengi olduğunu varsayarsak, kahverenginin sayı karşılığı 1 dir. Bir sonraki bandın rengi ise bize 2. Sayı değerini verir. Örneğin bu renkde kırmızı olsun yani karşılığı olan sayı 2. Daha sonra 3. Band rengi ise sıfır sayısını verir. Örneğin rengimiz portakal rengi olsun bunun sayısal değeri de 3 dür ve buda ilk iki sayı yanına 3 tane 0 koymaktır.
24 18 Sonuçta dirençe değerini bulacak olursak kahverengi, kırmızı ve portakal rengi yanyana geldiği zaman direnç değerinin Ω olduğunu belirleyebiliriz. Aşağıdaki Tablo de direnç değerlerini okurken yararlanabilenecek renk kodlarını vermektedir. Tablo Direnç renk kodları Mercimek Kapasite Projede PIC 16F628A nın osilatör devresi için kullanılmıştır. Elektronik devrelerde katlar arasında kuplaj, by pass, dekuplaj, bloklama, ayar ve filtre elemanı olarak kullanılan pasif bir devre elemanıdır. Elektrikte kompanzasyon yani güç katsayısının 1 e yaklaştırılmasında, bir fazlı motorlarda ilk hareketi sağlamada ve kalkınma momentini artırmada kullanılır. Şekil da görüldüğü gibi mercimek kondansatör olarak adlandırılan kutupsuz kondansatörler bulunduğu gibi yine elektronikte sıkça kullanılan yönlü kondansatörler mevcuttur.
25 19 Şekil Mercimek Kapasite Kristal Osilatör Osilatörlerde frekansın sabit olması çok önemlidir. Frekansın sabit kalabilme durumuna frekans kararlılığı denir. Pek çok elektronik uygulama da frekansın kararlı olması önem arz etmektedir. Bu noktada kristal osilatörler devreye girmektedir. Bu osilatörlerin yapısında quartz kristalleri kullanılmaktadır. Bu kristaller çok kararlı frekanslar üreterek hassas frekans gerektiren devrelerde kullanılırlar. Quartz kristali üzerine bir basınç uygulandığında iki ucu arasında gerilim meydana getiren bir maddedir. Şekil de gösterilen kristal osilatör projede mikrodenetleyecinin ihtiyaç duyduğu clock sinyalini üretmede kullanılmaktadır. Kullanılan kristal osilatörün frekansı 4 MHz dir. Şekil Mhz kristal osilatör
26 DC Güç Kaynağı DC güç kaynağı şebekeden aldığı alternatif akımı elektronik devrelerin çalışabilmesi için ihtiyaç doğru akıma çeviren elemandır. İçerisinde yarım dalga veya tam dalga doğrultucusu bulunur. Güç kaynakları farklı seviyelerde DC gerilimler sağlayabilmektedir. Örneğin; 5V, 12V, 24V DC gerilim veren güç kaynakları günümüzde sıkça kullanılmaktadır. Projede kullanılan DC güç kaynağının çalışması içinde çıkış uçlarından mavi portu toprağa kısa devre edilmiştir. Şekil de görülen DC kaynak projede 12 V ve 5 V luk besleme almak için kullanılmıştır. Şekil Güç Kaynağı Breadboard Elektronik devreleri daha kolay ve daha kısa zamanda kurabilmek için breadboardlar kullanılır. Breadbordlar, üzerlerine kabloların bağlanması için delikli şekilde yapılmış tablalardır. Şekil da görüldüğü gibi boardın en üstünde üzerleri kırmızıyla çizilmiş çizgiler içten kısadevredir, yani soldan sağa bir sütun kısa devre şeklindedir. Aynı şekilde resmin sağında görülen yukardan aşağıya üzeri kırmızı çekilen deliklerde içten kısa devredir. En üstteki satır halinde kısa devre olan delikler genelde enerji uçlarının bağlandıkları bölümlerdir. Elektronik devre elemanları ise yukardan aşağı kısa devre olan ortadaki deliklere bağlanmaktadır. Delikler arası genellikle 0.1 inch yani 2.54 mm dir. Breadboarda bağlantı için 0.6 mm lik yalıtımlı tellerin kullanılması tavsiyeedilir.
27 21 Şekil Breadboard
28 22 2. SİSTEM TASARIMI 2.1. Giriş Projedeki amaç kahvaltı tabağı olarak düşünülen diskin istenilen yönde dönmesini ve durmasını sağlamaktır. Bunun içinde kullanılacak step motorun miline takılan diskin kontrolü sağlanacaktır. Kullanıcıya bağlı olarak yön ve konum seçimi yapılabilecek olan projede öncelikle olarak kullanılacak olan step motorun kontrolü yapılacaktır. Step motor kontrolü PIC 16F628A ile yapılacaktır. Ayrıca PIC direkt olarak step motoru sürmeye yetmeyeceğinden ULN2003 entegresi kullanılacaktır. Projenin modellenmesi için PROTEUS programı kullanılmıştır Sistemin Modellenmesi PROTEUS programını kullanarak projede kullanılacak elemanları bilgisayar ortamında gerekli bağlantıları yaparak simüle etmek projenin gerçekte uygulanmadan önce hertürlü hatayı görmemizi sağlayacaktır. PROTEUS yardımıyla step motorun dönüş yönü ve konumunu kontrol etmek için çizilen uygulama şekil 2.2 de görülmektedir. Şekil 2.2 de görüldüğü gibi PROTEUS da modelleme yapılırken önce PROTEUS programı açılarak devrede kullanılacak elemanlar belirlenir. Daha sonra PIC16F628A nın 6, 7, 8, 9 nolu çıkış uçları ULN2003 entegresinin 1, 2, 3, 4 nolu ucuna bağlanır. ULN ,16, 17, 18 nolu pinleri de sırasıyla step motora adım darbesi vermek için dört ucuna bağlanır ve ULN2003 entegresinin 10 numaralı pini besleme için 12 V a bağlanır. Ayrıca step motorun ortak ucu da 12 V a bağlanır. PIC 16F628A in çalışması için gerekli olan kristal osilatör kapasiteler yardımıyla mikroişlemcinin 15 ve 16 nolu çıkış uçlarına bağlanır.10 numaralı uca bağlanacak olan Led ile step motorun dönmeye hazır olup olmadığı kontrol edilir.cny 70 sensöründen gelen 1 veya 0 yani +5 v gerilimde PIC in 11 nolu bacağına bağlanır.daha sonra PIC 16F628A in 1, 2, 17, 18 nolu pinleride push butonlara bağlanarak step motorun konum kontrolü için yapılan devre hazır hale gelir. Geriye sadece PIC 16F628A nın çalışması için gerekli olan program kalır. [3]
29 23 Şekil 2.2 Uygulama proteus devresi
30 24 Şimdide CCS C PIC programlayıcıyı kullanarak Step motorun konum kontrolü için yazılan program aşağıda görülmektedir. Bu programı da PROTEUS programındaki PIC 16F628A nın içine atarak sistem test edilebilir. [4] Aşağıda step motorun sürülmesi için yazılan PIC programı görülmektedir. #include <16f628A.h> // Kullanılan mikroişlemci tanıtımı #fuses INTRC_IO,XT,NOCPD,CPD,nomclr // Sigorta ayarları #use delay (clock= ) // Çalışma frekansı #use fast_io(a) // A port aktif #use fast_io(b) // B port aktif int z=0,hiz=40,i,tus=0; const int tam_sag[]={0x03,0x06,0x0c,0x09}; // Sağa dönüş adımları const int tam_sol[]={0x09,0x0c,0x06,0x03}; // Sola dönüş adımları void saga_donus (void) // Sağa dönüş fonksiyonu { for(i=0;i<12;++i){ if (z==4) z=0; output_b(tam_sag[z]); delay_ms(hiz); z++;} } void sola_donus (void) // Sola dönüş fonksiyonu
31 25 { if(z==4) z=0; for(i=0;i<12;++i){ ++z; if (z==4) z=0; output_b(tam_sol[z]); delay_ms(hiz);} } void eee (void) // durak { if(tus==1) for(i=0;i<4;i++) write_eeprom(i,i+1); if(tus==2) for(i=0;i<4;i++) write_eeprom(i,((i+1)%4)+1); if(tus==4) for(i=0;i<4;i++) write_eeprom(i,((i+2)%4)+1); if(tus==8) for(i=0;i<4;i++) write_eeprom(i,((i+3)%4)+1); }
32 26 void main (){ // Ana fonksiyon int zz=0,adres,s; set_tris_b(0x20); set_tris_a(0x0f); output_b(0x00); output_a(0x00); while(input(pin_b5)!=1) sola_donus(); for(i=0;i<4;i++) write_eeprom(i,i+1); while("ktu") { dur_step: output_high(pin_b4); tus=input_a(); if(tus==0) goto dur ; switch(tus){ case 1: zz=1;break; case 2: zz=2;break; case 4: zz=3;break;
33 27 case 8: zz=4;break;} for(i=0;i<4;i++){ if(zz==read_eeprom(i)){ //durak2 adres=i; durak (); break;}} if(adres>2) saga_donus(); else { if(adres==0) goto dur; else{ for(s=0;s<adres;s++) sola_donus(); }} }}
34 Sistemin Çalışma Prensibi Sistemde öncelikle olarak kahvaltı tabağı olarak kullanılacak olan dört parçaya bölünmüş olan disk motor miline yerleştirilmiştir. Diskin dört yönünden (kuzey, güney, doğu, batı) olmak üzere hangi yönde hangi dilim isteniyorsa o yöndeki butona basılarak istenilen dilim kullanıcın önüne getirilecektir. Bunun içinde her yönde 4 dilimi temsilen 4 buton kullanılacaktır. Toplam da 16 buton 4 yönde yerleştirilerek kullanıcının rahatça diski yani tabağı kontrol etmesi sağlanacaktır. Sistemin şematik olarak görünümü aşağıda Şekil 2.3 de görülmektedir. Şekil 2.3. Sistemin şematik gösterimi Sistemin çalışma prensibi olarak da örnek verilirse örneğin diskin doğu tarafında olduğumuzu varsayalım. Doğu tarafında A dilimini istenirse doğudaki A butonuna basarak A diliminin önümüze gelmesini sağlanacaktır. Referans olarak kullanılan konumdan istenilen konuma gelmek için step motor 180 derece açıyla dönecektir. Sistemde referans
35 29 olarak kullanılan noktayı belirlemek için CNY 70 sensörü kullanılmıştır. Sistem ilk çalışmaya başladığında 1 nolu durumda durması için CNY 70 sensör referans noktasında PIC 16F628A nın 11 nolu bacağına 5 V DC gerilim gelmesini sağlayarak diskin referans noktasında durmasını sağlayacaktır. Bundan sonra kullanıcıya bağlı olarak istenilen yönde ve konumda diskin kontrolü sağlanabilir. Sistem çalışma olarak çok karışık gözüksede aslında 4 temel pozisyonda çalışmaktadır. Bunlardan 1 nolu durumu referans alınarak diski 2 durumu için 90,3 durumu için 180,4 durumu içinde 270 döndürülerek istenilen konum elde edilecektir. Sistemde 16 buton kullanılacaktır. Ancak temelde 4 buton olacaktır. Bu da sistemde kolaylık sağlayacaktır. Örnek vermek gerekirse diskimiz 1 durumundan 2 durumuna geçmesi için kuzey yönünden A butonuna, güney yönünden C butonuna, doğu yönünden B butonuna, batı yönünden D butonuna basmak gerekir. Şekil 2.3 de görüldüğü gibi bu 4 durum aslında aynı durumdur. Bu nedenle 2. Durum için geçerli olan A, B, C, D butonları aynı girişten kontrol edilebilir.geri kalan diğer 3 durumda 3 girişle kontrol edilmiştir. Projenin son hali aşağıdaki Şekil ve Şekil de gösterilmiştir. Şekil Sistemin üstten görünümü
36 30 Şekil Sistemin Yandan Görünümü
37 31 3. GELİŞTİRİLEBİLİRLER Yapılan uygulamada düşünülen kahvaltı tabağı tek katlıdır. Büyük işletmelerde kullanılabilirliği açısından iki veya üç katlı yapılabilir. Bunun için bir step motor yerine iki veya daha fazla kullanılabilir. Kullanılan step motorların milleri birbiri içinden geçmek üzere birden fazla katlı bir kahvaltı tabağı yapılabilir.. Projede kullanılan step motorun gücü, hızı ve adım açısı değiştirilerek daha hızlı ve daha büyük bir kahvaltı tabağı düşünülebilir. Ayrıca bu kahvaltı tabağından sadece istenilen dilimi önümüze getirecek şekilde bir sistem tasarımıda yapılabilir. Böylece bir kullanıcın önündeki dilim alınmadan diğer kullanıcının önüne istenilen dilim getirilebilir.
38 32 4. SONUÇLAR Yapılan uygulamada günlük hayatta rahatlıkla kullanılabilecek bir kahvaltı tabağı yapılmıştır. Akıllı kahvaltı tabağı projesi dahada geliştirilebilir olup proje tamamen başlangıç aşaması olarak yapılmıştır. Yapılan testlerde kahvaltı tabağının bir peryodunun yaklaşık olarak 3 saniyede tamamladığı görülmüştür. İki dilim arasında ise 0.5 saniye ile 2 saniye arasında değişimi aşağıda Şekil 4 te görülmektedir. Ayrıca çok büyük ağırlıklarda çalışması zor olacağından kullanılan step motor yerine daha kararlı ve güçlü bir step motor kullanılarak daha büyük bir proje gerçeklenebilir. Projede kullanılan CNY 70 sensörü yerine daha sağlam konum ve kararlı çıkış veren bir sensör kullanılırsa tabağın konumu çok daha hassas olarak kontrol edilebilir. Bu projede bir mikrodenetleyici yardımıyla sistemin nasıl kontrol edilebileceğini, daha sonra ise sistem elemanlarının kontrolünün, hangi devre elemanlarıyla ve nasıl yapılacağını, kontrol için seçilen elemanların hangi kriterler göz önünde bulundurarak seçileceği öğrenilmiştir. Şekil 4 : Dilimlerin dönme açılarına göre değişimi
39 33 5. KAYNAKLAR [1] BAL, Güngör, Özel Elektrik Makinaları,2004,Ocak [2] GÜMÜŞKAYA, Haluk, Mikroişlemciler ve 8051 Ailesi,2007,Temmuz [3] BENSON, David, An Introduction to Stepper Motors for The Experimenter,2007,Şubat [4] ÇİÇEK, Serdar, CCS C ile PIC Programlama,2009,Temmuz
Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
BESLEME KARTI RF ALICI KARTI
 BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
EasyPic 6 Deney Seti Tanıtımı
 EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
Analog Sayısal Dönüşüm
 Analog Sayısal Dönüşüm Gerilim sinyali formundaki analog bir veriyi, iki tabanındaki sayısal bir veriye dönüştürmek için, az önce anlatılan merdiven devresiyle, bir sayıcı (counter) ve bir karşılaştırıcı
Analog Sayısal Dönüşüm Gerilim sinyali formundaki analog bir veriyi, iki tabanındaki sayısal bir veriye dönüştürmek için, az önce anlatılan merdiven devresiyle, bir sayıcı (counter) ve bir karşılaştırıcı
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
DENEY 21 IC Zamanlayıcı Devre
 DENEY 21 IC Zamanlayıcı Devre DENEYİN AMACI 1. IC zamanlayıcı NE555 in çalışmasını öğrenmek. 2. 555 multivibratörlerinin çalışma ve yapılarını öğrenmek. 3. IC zamanlayıcı anahtar devresi yapmak. GİRİŞ
DENEY 21 IC Zamanlayıcı Devre DENEYİN AMACI 1. IC zamanlayıcı NE555 in çalışmasını öğrenmek. 2. 555 multivibratörlerinin çalışma ve yapılarını öğrenmek. 3. IC zamanlayıcı anahtar devresi yapmak. GİRİŞ
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
İstanbul Teknik Üniversitesi IEEE Öğrenci Kolu
 Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa 2 Nolu Proje
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
DERS NOTLARI. Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi
 DERS NOTLARI Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi Ders-3 11.10.2016 555-Zaman Entegresi 555 Zaman Entegre Devresi monastable multivibratör (asimetrik kare dalga osilatör), astable
DERS NOTLARI Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi Ders-3 11.10.2016 555-Zaman Entegresi 555 Zaman Entegre Devresi monastable multivibratör (asimetrik kare dalga osilatör), astable
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU
 PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: dogan@neu.edu.tr Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: dogan@neu.edu.tr Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
Configuration bitleri ve reset durumları hakkında kavramlar
 PİC HAKKINDA KISA KISA BİLGİLER-1 Pic mikrodenetleyicilerinin 8 bit, 16 bit ve 32 bit işlemci çeşitleri vardır. Çoğu uygulamalarımız için 8 bit yeterli olmaktadır. Bu kursta kullanacağımız pic işlemcisi,
PİC HAKKINDA KISA KISA BİLGİLER-1 Pic mikrodenetleyicilerinin 8 bit, 16 bit ve 32 bit işlemci çeşitleri vardır. Çoğu uygulamalarımız için 8 bit yeterli olmaktadır. Bu kursta kullanacağımız pic işlemcisi,
Elektromekanik Kumanda Sistemleri / Ders Notları
 İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2)
") YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
Elektrik. Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları
 Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
2- Tristör ile yük akımı değiştirilerek ayarlı yükkontrolü yapılabilir.
 Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
PIC UYGULAMALARI. Öğr.Gör.Bülent Çobanoğlu
 PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
Değişken Doğru Akım Zaman göre yönü değişmeyen ancak değeri değişen akımlara değişken doğru akım denir.
 DC AKIM ÖLÇMELERİ Doğru Akım Doğru akım, zamana bağlı olarak yönü değişmeyen akıma denir. Kısa gösterimi DA (Doğru Akım) ya da İngilizce haliyle DC (Direct Current) şeklindedir. Doğru akımın yönü değişmese
DC AKIM ÖLÇMELERİ Doğru Akım Doğru akım, zamana bağlı olarak yönü değişmeyen akıma denir. Kısa gösterimi DA (Doğru Akım) ya da İngilizce haliyle DC (Direct Current) şeklindedir. Doğru akımın yönü değişmese
BÖLÜM X OSİLATÖRLER. e b Yükselteç. Be o Geri Besleme. Şekil 10.1 Yükselteçlerde geri besleme
 BÖLÜM X OSİLATÖRLER 0. OSİLATÖRE GİRİŞ Kendi kendine sinyal üreten devrelere osilatör denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen ve testere
BÖLÜM X OSİLATÖRLER 0. OSİLATÖRE GİRİŞ Kendi kendine sinyal üreten devrelere osilatör denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen ve testere
ASENKRON MOTORLARA YOL VERME METODLARI
 DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
Deney 10: Analog - Dijital Dönüştürücüler (Analog to Digital Converters - ADC) Giriş
 Giriş") Deney 10: Analog - Dijital Dönüştürücüler (Analog to Digital Converters - ADC) Analog - Dijital Dönüştürücülerin ADC0804 entegre devresi ile incelenmesi Giriş Sensör ve transdüser çıkışlarında genellikle
Deney 10: Analog - Dijital Dönüştürücüler (Analog to Digital Converters - ADC) Analog - Dijital Dönüştürücülerin ADC0804 entegre devresi ile incelenmesi Giriş Sensör ve transdüser çıkışlarında genellikle
ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ SAYISAL TASARIM LABORATUVARI DENEY 6 ANALOG/DİGİTAL DÖNÜŞTÜRÜCÜ. Grup Numara Ad Soyad RAPORU HAZIRLAYAN:
 ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ SAYISAL TASARIM LABORATUVARI DENEY 6 ANALOG/DİGİTAL DÖNÜŞTÜRÜCÜ DENEYİ YAPANLAR Grup Numara Ad Soyad RAPORU HAZIRLAYAN: Deneyin Yapılış Tarihi Raporun Geleceği Tarih Raporun
ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ SAYISAL TASARIM LABORATUVARI DENEY 6 ANALOG/DİGİTAL DÖNÜŞTÜRÜCÜ DENEYİ YAPANLAR Grup Numara Ad Soyad RAPORU HAZIRLAYAN: Deneyin Yapılış Tarihi Raporun Geleceği Tarih Raporun
ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI
 DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
 BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1
 6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
Hazırlayan: Tugay ARSLAN
 Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
DENEY 1- LABORATUAR ELEMANLARININ TANITIMI VE DC AKIM, DC GERİLİM, DİRENÇ ÖLÇÜMLERİ VE OHM KANUNU
 DENEY 1- LABORATUAR ELEMANLARININ TANITIMI VE DC AKIM, DC GERİLİM, DİRENÇ ÖLÇÜMLERİ VE OHM KANUNU 1.1. DENEYİN AMAÇLARI Ölçü aletleri, Breadboardlar ve DC akım gerilim kaynaklarını kullanmak Sayısal multimetre
DENEY 1- LABORATUAR ELEMANLARININ TANITIMI VE DC AKIM, DC GERİLİM, DİRENÇ ÖLÇÜMLERİ VE OHM KANUNU 1.1. DENEYİN AMAÇLARI Ölçü aletleri, Breadboardlar ve DC akım gerilim kaynaklarını kullanmak Sayısal multimetre
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ
 PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ PIC16F84 UYGULAMA-1 İŞLEM BASAMAKLARI 1. PIC16F84 te A portunun ilk bitine (RA0) bağlı butona basıldığında,
PD103 BUTON LED UYGULAMA DEVRESİ UYGULAMA ÖRNEKLERİ MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ PIC16F84 UYGULAMA-1 İŞLEM BASAMAKLARI 1. PIC16F84 te A portunun ilk bitine (RA0) bağlı butona basıldığında,
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ÇİZGİ İZLEYEN ROBOT BİTİRME ÇALIŞMASI
 T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ÇİZGİ İZLEYEN ROBOT BİTİRME ÇALIŞMASI BİLAL OKAN İÇMEZ 179938 ŞAFAK GENÇER 209131 BAHAR-2011 TRABZON T.C.
T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ÇİZGİ İZLEYEN ROBOT BİTİRME ÇALIŞMASI BİLAL OKAN İÇMEZ 179938 ŞAFAK GENÇER 209131 BAHAR-2011 TRABZON T.C.
Şekil1. Geri besleme eleman türleri
 HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
326 ELEKTRİK MAKİNALARI LABORATUVARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 326-04
 MOTOR DENEY 326-04") İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
Deney 4: 555 Entegresi Uygulamaları
 Deneyin Amacı: Deney 4: 555 Entegresi Uygulamaları 555 entegresi kullanım alanlarının öğrenilmesi. Uygulama yapılarak pratik kazanılması. A.ÖNBİLGİ LM 555 entegresi; osilasyon, zaman gecikmesi ve darbe
Deneyin Amacı: Deney 4: 555 Entegresi Uygulamaları 555 entegresi kullanım alanlarının öğrenilmesi. Uygulama yapılarak pratik kazanılması. A.ÖNBİLGİ LM 555 entegresi; osilasyon, zaman gecikmesi ve darbe
Multivibratörler. Monastable (Tek Kararlı) Multivibratör
 Multivibratör") Multivibratörler Kare dalga veya dikdörtgen dalga meydana getiren devrelere MULTİVİBRATÖR adı verilir. Bu devreler temel olarak pozitif geri beslemeli iki yükselteç devresinden oluşur. Genelde çalışma
Multivibratörler Kare dalga veya dikdörtgen dalga meydana getiren devrelere MULTİVİBRATÖR adı verilir. Bu devreler temel olarak pozitif geri beslemeli iki yükselteç devresinden oluşur. Genelde çalışma
PROJE RAPORU. Proje adı: Pedalmatik 1 Giriş 2 Yöntem 3 Bulgular 6 Sonuç ve tartışma 7 Öneriler 7 Kaynakça 7
 PROJE RAPORU Proje Adı: Pedalmatik Projemizle manuel vitesli araçlarda gaz, fren ve debriyaj pedallarını kullanması mümkün olmayan engelli bireylerin bu pedalları yönetme kolu (joystick) ile sol el işaret
PROJE RAPORU Proje Adı: Pedalmatik Projemizle manuel vitesli araçlarda gaz, fren ve debriyaj pedallarını kullanması mümkün olmayan engelli bireylerin bu pedalları yönetme kolu (joystick) ile sol el işaret
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ
 KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ Amaç: Bu deneyde terslemeyen kuvvetlendirici, toplayıcı kuvvetlendirici ve karşılaştırıcı
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ Amaç: Bu deneyde terslemeyen kuvvetlendirici, toplayıcı kuvvetlendirici ve karşılaştırıcı
3 FAZLI ASENKRON MOTORLAR
 3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
DOKUMANLAR
 DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
5.Eğitim E205. PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628:
 5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ
 1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
PIC16F84A Mikroislemci Denetimli Bir Sayisal Sinyal Üretici Tasarimi
 PIC16F84A Mikroislemci Denetimli Bir Sayisal Sinyal Üretici Tasarimi ÖZETÇE Melike SAH ve Doç.Dr. Hasan KÖMÜRCÜGIL Bilgisayar Mühendisligi Bölümü Dogu Akdeniz Üniversitesi Gazimagusa, Kuzey Kibris Türk
PIC16F84A Mikroislemci Denetimli Bir Sayisal Sinyal Üretici Tasarimi ÖZETÇE Melike SAH ve Doç.Dr. Hasan KÖMÜRCÜGIL Bilgisayar Mühendisligi Bölümü Dogu Akdeniz Üniversitesi Gazimagusa, Kuzey Kibris Türk
9. Güç ve Enerji Ölçümü
 9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
PIC KULLANARAK GÜÇ KARSAYISI ÖLÇÜM DEVRESİ TASARIMI VE SİMÜLASYON
 PIC KULLANARAK GÜÇ KARSAYISI ÖLÇÜM DEVRESİ TASARIMI VE SİMÜLASYON Sabir RÜSTEMLİ 1 Muhammet ATEŞ 2 1 Elektrik-Elektronik Mühendisliği Bölümü, Yüzüncü Yıl Üniversitesi, Van 2 Başkale Meslek Yüksekokulu
PIC KULLANARAK GÜÇ KARSAYISI ÖLÇÜM DEVRESİ TASARIMI VE SİMÜLASYON Sabir RÜSTEMLİ 1 Muhammet ATEŞ 2 1 Elektrik-Elektronik Mühendisliği Bölümü, Yüzüncü Yıl Üniversitesi, Van 2 Başkale Meslek Yüksekokulu
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ EELP212 DERS 05
 EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
KULLANILACAK ARAÇLAR
 MÜHENDİSLİK ve MİMARLIK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK DEVRELERİ LABORATUVARI KULLANILACAK ARAÇLAR LABORATUVARDA UYULMASI GEREKEN KURALLAR Laboratuvara kesinlikle YİYECEK VE İÇECEK getirilmemelidir.
MÜHENDİSLİK ve MİMARLIK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK DEVRELERİ LABORATUVARI KULLANILACAK ARAÇLAR LABORATUVARDA UYULMASI GEREKEN KURALLAR Laboratuvara kesinlikle YİYECEK VE İÇECEK getirilmemelidir.
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
Elektromekanik Kumanda Sistemleri / Ders Notları
 10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
T.C. DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BMT103 ELEKTRİK DEVRE TEMELLERİ DERSİ LABORATUVARI DENEY NO: 7
 T.C. DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BMT103 ELEKTRİK DEVRE TEMELLERİ DERSİ LABORATUVARI DENEY NO: 7 KONDANSATÖRLER VE BOBİNLER Doç. Dr. İbrahim YÜCEDAĞ Arş. Gör. M.
T.C. DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BMT103 ELEKTRİK DEVRE TEMELLERİ DERSİ LABORATUVARI DENEY NO: 7 KONDANSATÖRLER VE BOBİNLER Doç. Dr. İbrahim YÜCEDAĞ Arş. Gör. M.
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI
 PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
T.C. ADIYAMAN ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ DEVRE ANALİZİ LABORATUVARI I DENEY FÖYLERİ
 T.C. ADIYAMAN ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ DEVRE ANALİZİ LABORATUVARI I DENEY FÖYLERİ Hazırlayan Arş. Gör. Ahmet NUR DENEY-1 ÖLÇÜ ALETLERİNİN İNCELENMESİ Kapaksız
T.C. ADIYAMAN ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ DEVRE ANALİZİ LABORATUVARI I DENEY FÖYLERİ Hazırlayan Arş. Gör. Ahmet NUR DENEY-1 ÖLÇÜ ALETLERİNİN İNCELENMESİ Kapaksız
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. IŞIĞA DÖNEN KAFA Proje No:2
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA Proje No:2 Proje Raporu ÖMER FARUK ŞAHAN 12068030 16.01.2013 İstanbul İÇİNDEKİLER
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA Proje No:2 Proje Raporu ÖMER FARUK ŞAHAN 12068030 16.01.2013 İstanbul İÇİNDEKİLER
IR Modülü. Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm
 ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ
 MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Mikroişlemciler ve Assembly Dili Ders Saati (T+U+L) Kredi AKTS 4
MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Mikroişlemciler ve Assembly Dili Ders Saati (T+U+L) Kredi AKTS 4
ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS)
") ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS) 1. Giriş Adım (Step) Motorları Açısal konumu adımlar halinde değiştiren, çok hassas sinyallerle sürülen motorlara adım motorları denir. Adından
ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS) 1. Giriş Adım (Step) Motorları Açısal konumu adımlar halinde değiştiren, çok hassas sinyallerle sürülen motorlara adım motorları denir. Adından
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı
 Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
Sabit Gerilim Regülatörü Kullanarak Ayarlanabilir Güç Kaynağı Sabit değerli pozitif gerilim regülatörleri basit bir şekilde iki adet direnç ilavesiyle ayarlanabilir gerilim kaynaklarına dönüştürülebilir.
DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI
 AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işın Avcısı Proje 2.
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işın Avcısı Proje 2 Proje Raporu Kaan Tellioğlu - 12067006 16.01.2013 İstanbul 1 İÇİNDEKİLER
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işın Avcısı Proje 2 Proje Raporu Kaan Tellioğlu - 12067006 16.01.2013 İstanbul 1 İÇİNDEKİLER
ELEKTRİK MOTORLARI VE SÜRÜCÜLER ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ
 BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
TECO N3 SERĐSĐ HIZ KONTROL CĐHAZI HIZLI BAŞLAT DÖKÜMANI. ADIM 1: Sürücü beslemesini ve motor uçlarını bağlama
 1/6 TECO N3 SERĐSĐ HIZLI BAŞLAT DÖKÜMANI ADIM 1 Sürücü beslemesini ve motor uçlarını bağlama Monofaze N3 serisinde 220 volt beslemesi L1 (L) ve L3 (N) girişlerine bağlanarak cihaza enerji verilir. Aşağıdaki
1/6 TECO N3 SERĐSĐ HIZLI BAŞLAT DÖKÜMANI ADIM 1 Sürücü beslemesini ve motor uçlarını bağlama Monofaze N3 serisinde 220 volt beslemesi L1 (L) ve L3 (N) girişlerine bağlanarak cihaza enerji verilir. Aşağıdaki
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ
 KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ Amaç: Bu deney, tersleyen kuvvetlendirici, terslemeyen kuvvetlendirici ve toplayıcı
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRONİK LAB 1 DERSİ İŞLEMSEL KUVVETLENDİRİCİ - 2 DENEYİ Amaç: Bu deney, tersleyen kuvvetlendirici, terslemeyen kuvvetlendirici ve toplayıcı
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI
 DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi.
 ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak
ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
BÖLÜM IX DALGA MEYDANA GETİRME USULLERİ
 BÖLÜM IX DALGA MEYDANA GETİRME USULLERİ 9.1 DALGA MEYDANA GETİRME USÜLLERİNE GİRİŞ Dalga üreteçleri birkaç hertzden, birkaç gigahertze kadar sinyalleri meydana getirirler. Çıkışlarında sinüsoidal, kare,
BÖLÜM IX DALGA MEYDANA GETİRME USULLERİ 9.1 DALGA MEYDANA GETİRME USÜLLERİNE GİRİŞ Dalga üreteçleri birkaç hertzden, birkaç gigahertze kadar sinyalleri meydana getirirler. Çıkışlarında sinüsoidal, kare,
ASENKRON (İNDÜKSİYON)
") ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
Deney 6: Ring (Halka) ve Johnson Sayıcılar
 ve Johnson Sayıcılar") Deney 6: Ring (Halka) ve Johnson Sayıcılar Kullanılan Elemanlar xlm Entegresi, x0 kohm direnç, x00 kohm direnç, x0 µf elektrolitik kondansatör, x00 nf kondansatör, x 7HC7 (D flip-flop), x 0 ohm, x Led
Deney 6: Ring (Halka) ve Johnson Sayıcılar Kullanılan Elemanlar xlm Entegresi, x0 kohm direnç, x00 kohm direnç, x0 µf elektrolitik kondansatör, x00 nf kondansatör, x 7HC7 (D flip-flop), x 0 ohm, x Led
Şekil Sönümün Tesiri
 LC Osilatörler RC osilatörlerle elde edilemeyen yüksek frekanslı osilasyonlar LC osilatörlerle elde edilir. LC osilatörlerle MHz seviyesinde yüksek frekanslı sinüsoidal sinyaller elde edilir. Paralel bobin
LC Osilatörler RC osilatörlerle elde edilemeyen yüksek frekanslı osilasyonlar LC osilatörlerle elde edilir. LC osilatörlerle MHz seviyesinde yüksek frekanslı sinüsoidal sinyaller elde edilir. Paralel bobin
Yumuşak Yol Vericiler - TEORİ
 Yumuşak Yol Vericiler - TEORİ 1. Gerilimi Düşürerek Yolverme Alternatif akım endüksiyon motorları, şebeke gerilimine direkt olarak bağlandıklarında, yol alma başlangıcında şebekeden Kilitli Rotor Akımı
Yumuşak Yol Vericiler - TEORİ 1. Gerilimi Düşürerek Yolverme Alternatif akım endüksiyon motorları, şebeke gerilimine direkt olarak bağlandıklarında, yol alma başlangıcında şebekeden Kilitli Rotor Akımı
Proje Teslimi: 2013-2014 güz yarıyılı ikinci ders haftasında teslim edilecektir.
 ELEKTRONĐK YAZ PROJESĐ-2 (v1.1) Yıldız Teknik Üniversitesi Elektronik ve Haberleşme Mühendisliği Bölümünde okuyan 1. ve 2. sınıf öğrencilerine; mesleği sevdirerek öğretmek amacıyla, isteğe bağlı olarak
ELEKTRONĐK YAZ PROJESĐ-2 (v1.1) Yıldız Teknik Üniversitesi Elektronik ve Haberleşme Mühendisliği Bölümünde okuyan 1. ve 2. sınıf öğrencilerine; mesleği sevdirerek öğretmek amacıyla, isteğe bağlı olarak
İçerik. Ürün no.: SLE518I-K4/4-M12 Güvenlik tek ışın fotoelektrik sensör alıcı
 Ürün no.: 50134013 SLE518I-K4/4-M12 Güvenlik tek ışın fotoelektrik sensör alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve
Ürün no.: 50134013 SLE518I-K4/4-M12 Güvenlik tek ışın fotoelektrik sensör alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır.
 ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
Algılayıcılar (Sensors)
") Algılayıcılar (Sensors) Sayısal işlem ve ölçmeler sadece elektriksel büyüklüklerle yapılmaktadır. Genelde teknik ve fiziksel büyüklükler (sıcaklık, ağırlık kuvveti ve basınç gibi) elektrik dalından olmayan
Algılayıcılar (Sensors) Sayısal işlem ve ölçmeler sadece elektriksel büyüklüklerle yapılmaktadır. Genelde teknik ve fiziksel büyüklükler (sıcaklık, ağırlık kuvveti ve basınç gibi) elektrik dalından olmayan
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Çizgi İzleyen Robot Yapımı ve Teknik Bilgiler
 Çizgi İzleyen Robot Yapımı ve Teknik Bilgiler ÇİZGİ İZLEYEN ROBOT NEDİR? Çizgi izleyen robot belirli bir yolu otonom olarak takip edebilen robottur. Bu yol siyah zemin üzerinde beyaz renkte ya da beyaz
Çizgi İzleyen Robot Yapımı ve Teknik Bilgiler ÇİZGİ İZLEYEN ROBOT NEDİR? Çizgi izleyen robot belirli bir yolu otonom olarak takip edebilen robottur. Bu yol siyah zemin üzerinde beyaz renkte ya da beyaz
Deniz Elektronik Laboratuvarı www.denizelektronik.com Tel:0216-348 65 21 D7220_RV4
 STEREO FM VERİCİ delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 D7220_RV4 7-2008-5-2010-2-2011 REV4 PC üzerinden frekans ve kişisel bilgi kaydı. RS232 ve RDS sistem girişli.stereo-mono seçme özellikli,yüksek
STEREO FM VERİCİ delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 D7220_RV4 7-2008-5-2010-2-2011 REV4 PC üzerinden frekans ve kişisel bilgi kaydı. RS232 ve RDS sistem girişli.stereo-mono seçme özellikli,yüksek
BÖLÜM 1 RF OSİLATÖRLER
 BÖÜM RF OSİATÖRER. AMAÇ. Radyo Frekansı(RF) Osilatörlerinin çalışma prensibi ve karakteristiklerinin anlaşılması.. Osilatörlerin tasarlanması ve gerçeklenmesi.. TEME KAVRAMARIN İNEENMESİ Osilatör, basit
BÖÜM RF OSİATÖRER. AMAÇ. Radyo Frekansı(RF) Osilatörlerinin çalışma prensibi ve karakteristiklerinin anlaşılması.. Osilatörlerin tasarlanması ve gerçeklenmesi.. TEME KAVRAMARIN İNEENMESİ Osilatör, basit
DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI
 DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI Karamanoğlu Mehmetbey Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Devre ve Elektronik Laboratuvarında yer alan her bir masada aşağıda isim ve özellikleri
DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI Karamanoğlu Mehmetbey Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Devre ve Elektronik Laboratuvarında yer alan her bir masada aşağıda isim ve özellikleri
İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ
 ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR
 MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR Bülent ÖZBEK Örnek Program -1- B Portuna bağlı LED leri Yakma Bu programda PIC16F84 mikrodenetleyicisinin B portuna bağlı 8 adet LED in yanması sağlanacaktır. Bunu
MİKRODENETLEYİCİLER ÖRNEK PROGRAMLAR Bülent ÖZBEK Örnek Program -1- B Portuna bağlı LED leri Yakma Bu programda PIC16F84 mikrodenetleyicisinin B portuna bağlı 8 adet LED in yanması sağlanacaktır. Bunu
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER. Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul
 OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI
 PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.