1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi
|
|
|
- Melek Kaya
- 6 yıl önce
- İzleme sayısı:
Transkript
1 1. Mekanizma tekniğinde temel kavramlar, 2. Mekanizmaların serbestlik derecesi 3. Mekanizmaların konum analizi Öğretim Üyesi: Yrd. Doç. Dr. Nurdan Bilgin Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez Sunum Prof. Dr. Eres Söylemez in izniyle yukarıda linki verilen notlardan derlenmiştir. Daha geniş bilgi ve animasyonlar için ilgili sayfayı ziyaret etmeniz önerilmektedir.
2 Mekanizma Tekniği Eğitiminde Amaç Makinalarda bulunan cisimlerin hareketlerinin incelenmesinde kullanılabilecek gerekli temel kuralları göstermek ve bu kurallardan faydalanarak makinaların gerek hareket analizi ve gerek hareket sentezinin yapılabilmesi için gereken bilgileri ortaya koymaktır. Mekanizma Çalışmaları Tipin Belirlenmesi Analiz, (Mekanizma Biliniyor) Sentez, (Mekanizma Bilinmiyor) Kinematik Analiz Kuvvet Analizi İşlevsel Sentez, (hangisini tercih etmeliyiz) Konum İvme Hız Statik Dinamik Kinematik Sentez, (Boyutlarla oynarız)
3 Mekanizma tekniğinde temel kavramlar Mekanizma, kuvvet ve hareket iletimi için kullanılabilen rijit cisimlerin rijit mafsallarla birleştirildiği sistem olarak tanımlanabilir. Kinematik Eleman, Kinematik Çift Mekanizmaların en önemli özelliğinin sistemde bulunan rijit cisimler olmayıp, bu cisimleri birleştiren mafsal veya kinematik çift olarak tanımlanan bağlantılardır. Mafsallarda oluşan hareket serbestlikleri ve bu hareket serbestliklerinden kaynaklanan cisimlerin birbirlerine göre bağıl hareketleri, bir mekanizmayı diğerinden ayıran özelliklerdir. Kinematik eleman, bir rijit cismi diğer bir rijit cisme, birbirlerine göre bağıl hareket yapabilecek şekilde bağlamak için kullanılan rijit cisim kısmına denir. Bağlanan cisimler arasında mutlaka bağıl hareket olması şarttır; ve iki cisim arasında olası bağıl hareket, belirli yönlerde sınırlanacaktır. Kinematik çift veya mafsal, iki rijit cisim üzerinde bulunan kinematik elemanların yan yana getirilmesinden oluşan bağlantıdır. Bir mekanizmada kullanılan kinematik çift çeşitleri ve bu kinematik çiftlerin mekanizma içinde dağılımı, mekanizmanın temel özelliklerini tanımlar. Uzuv-Kinematik Zincir Bir rijit cisim üzerinde kinematik çift oluşturan en az iki kinematik eleman var ise, bu cisme uzuv denir. Uzuv ikiden fazla kinematik eleman ihtiva edebilir (fakat iki kinematik elemandan az olamaz). Uzuvlar iki, üç, dört kinematik elemanlı olarak kinematik eleman sayısına göre sınıflandırılabilir.
4 Mekanizma Tekniği Dersi Kapsamı ve Yapılan kabuller Mekanizmalarda Parametreler 1.) Sabit Parametreler (boyutlar) 2.) Değişken Parametreler (konum değişkenleri, mafsal değişkenleri) Bu ders kapsamında tüm uzuv ve mafsallar rijit kabul edilecektir. Mekanizmanın Tipinin Belirlenmesi: Bilinen bir mekanizmanın topolojik karakterinin belirlenmesidir. Topolojik karakter mekanizmanın boyutlarına bağlı değildir, sadece uzuv ve mafsal sayısı gibi mekanizmayı belirleyen özellikleri içerir. Kinematik Sentez: Verilen hareketin gerçekleştirilmesi için boyutların belirlenmesidir.
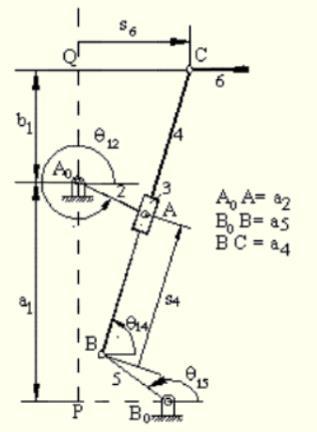
5 Mekanizma Tekniği Dersinin İçeriği Boyutlar: a 1,a 2,a 3,a 4 Değişken Parametreler: θ 12, θ 13, θ 14 etc Konum Analizi: Boyutlar ve değişken parametrelerden gerekli olan kadarı verilir diğerleri bulunur. Hız Analiz: Boyutlar ve değişken parametrelerden gerekli olan kadarı ve hızları verilir diğerleri bulunur. İvme Analizi: Boyutlar ve değişken parametrelerden gerekli olan kadarı, hızları ve ivmeleri verilir diğerleri bulunur. θ 13 θ 12 θ 14

6 Kinematik çiftlerin sınıflandırılması: Kinematik çiftler çok çeşitli şekilde sınıflandırılabilir. Burada temel ve en çok kullanılan sınıflandırmalar kullanılacaktır. Kapalı kinematik çiftlerde, iki kinematik eleman arasında temas, mekanizmanın tüm hareketi süresince mevcuttur. Yandaki şekilde bir kapalı kinematik çift görülmektedir. Açık kinematik çiftlerde, kinematik elemanlar hareketin tümü boyunca temas etmeyebilirler ve bu temas kontrol edilebilir. Aşağıda Genova Mekanizması olarak adlandırılan bir kesikli hareket mekanizması görülmektedir.

7 Kinematik çiftlerin sınıflandırılması: Kapalı kinematik çiftlerde eğer temas bir kuvvetten dolayı ise, bu tür kinematik çiftler kuvvet kapalı olarak adlandırılacaktır. Kinematik çiftlerin geometrik şekillerinden dolayı aralarında devamlı temas sağlanıyor ise, bu tür kinematik çiftler şekil kapalıdır. Şekil kapalı kinematik çiftlerde bir kinematik eleman diğerini sarar. Kapalı kinematik çiftler ayrıca temas şekline göre basit veya yüksek kinematik çift olarak sınıflandırılabilir. Basit kinematik çiftlerde kinematik elemanlar bir yüzey boyunca temas ederler. Bu durumda temas gerilimleri daha düşük olacaktır. Şekilde bir basit kinematik çift görülmektedir. Yüksek kinematik çiftlerde ise temas, geometrik olarak bir nokta veya bir çizgi üzerindedir. Yukarıda kuvvet ve şekil kapalı kinematik çiftlere verilen iki örnek de birer yüksek kinematik çifttir. Şekil kapalı kinematik çiftde çizgisel bir temas sağlanmaktadır.
8 Serbestlik Derecesi Uzay serbestlik derecesi, o uzayda bulunan bir cismin konumunu belirlemek için gerekli olan bağımsız parametre sayısıdır. Üç boyutlu Uzay Serbestlik Derecesi λ =6 dır: Şu şekilde belirlenir: cismin üzerinde aynı doğru üzerinde bulunmayan her hangi üç noktanın (P 1, P 2, P 3 ) konumu belirlendiğinde, rijidite kavramından diğer noktaların konumu belirlenmiş olacaktır. Bu üç noktanın her birinin konumu üç parametre ile belirlenir (P 1 (x 1, y 1, z 1 ), P 2 (x 2, y 2, z 2 ) ve P 3 (x 3, y 3, z 3 )). Bu durumda üç noktanın ve dolayısı ile cismin konumunu belirlemek için dokuz parametre gerekli görülür ise de, cismi rijit kabul ettiğimizden bu üç nokta arasında uzaklıklar sabit olacaktır. Bu sabit uzaklık şartı dokuz parametre arasındaki şu üç ilişkiyi tanımlayacaktır: Dokuz parametre (x i, y i, z i : i =1,2,3) ve bu parametreler arasında üç denklem bulunmaktadır. Bu durumda bu parametreler arasından sadece altısını tanımladığımızda üç noktanın ve dolayısı ile cismin konumu belirlenmiş olacaktır. Bağımsız parametre sayısı altı olduğundan genel uzayda serbestlik derecesi altıdır. Düzlemde Uzay Serbestlik Derecesi λ =3 dür:
9 Bir kinematik çiftin (mafsalın) serbestlik derecesi Bir kinematik çiftin (mafsalın) serbestlik derecesi, o mafsalla birleştirilen cisimlerin birbirlerine göre bağıl konumlarını belirlemek için kullanılması gerekli bağımsız parametre sayısıdır. Kinematik çiftlerin serbestlik dereceleri ve bu serbestliklerin müsaade ettiği hareketin yönü ve tipi (dönme veya öteleme), kinematik çiftleri birbirinden ayıran en önemli özelliktir ve bu özellikler kinematik çiftlerin tiplerini belirlemekte kullanılır.
10
11 Uzuv-Kinematik Zincir Bir rijit cisim üzerinde kinematik çift oluşturan en az iki kinematik eleman var ise, bu cisme uzuv denir. Uzuv ikiden fazla kinematik eleman ihtiva edebilir (fakat iki kinematik elemandan az olamaz). Uzuvlar iki, üç, dört kinematik elemanlı olarak kinematik eleman sayısına göre sınıflandırılabilir. Birbirlerine kinematik çiftlerle bağlanmış uzuvlar bir zincir oluşturacaktır. Bu zincire Kinematik Zincir denir. Eğer kullanılan kinematik çiftlerin hepsi kapalı kinematik çift ise, bu zincir "Kapalı kinematik zincir" dir, kinematik çiftlerden birisi açık ise "Açık kinematik zincir" söz konusudur.

12 Kinematik Boyut Bir mekanizmada bulunan uzuvların kinematik boyutu o uzvun üzerinde bulunan kinematik elemanların birbirlerine göre konumlarını belirleyen boyutlardır ve bu boyutlar verildiğinde kinematik açıdan uzuv boyutları tanımlanmıştır. Bu boyutlar genellikle uzunluk ise de iki doğru arasında kalan bir açı da olabilir.
.")
13 Uzuv-Kinematik Zincir Kinematik zincir gerçek mekanizma yapısının bir modelidir. Bu modelde uzuv boyutları, yapısı ve şekli, mafsal yapısı ve şekli önemli değildir (tabiki mafsalın serbestlik derecesi önemlidir). Genellikle bu zincir modelinde uzuvlar bir doğru, bir üçgen veya dörtgen gibi basit şekillerle gösterilirler. Bu üçgen veya dörtgenin her bir köşesinde bir kinematik eleman bir başka uzuvda bulunan bir kinematik elemana bağlıdır. Bazı mafsal noktalarında ikiden fazla uzuv birbirine bağlı olabilir. Bu durumda o mafsal ile birleştirilen uzuv sayısından bir eksik sayı, mafsal derecesi olarak alınır ve o noktada mafsal derecesi kadar mafsal olduğu kabul edilir. Mafsal derecesi ile mafsal serbestlik derecesi iki farklı kavramdır.
14 Uzuv-Kinematik Zincir Kinematik zinciri oluşturan tüm uzuvların hareketi aynı düzlemde veya birbirlerine paralel düzlemlerde ise, bu kinematik zincirler "Düzlemsel kinematik zincir" dir. Uzuvların üzerinde bulunan noktaların tümü aynı merkezli küreler üzerinde hareket ediyor ise, "Küresel kinematik zincir" dir. En genel zincir ise "Uzaysal kinematik zincir" dir. Kinematik zincirde bulunan bir uzvun sabitleştirilmesi ile elde edilen sistem mekanizmadır. Bu tanım mekanizma için önceden vermiş olduğumuz (mekanizma, kuvvet ve hareket için kullanılabilen rijit cisimlerin rijit mafsallarla birleştirildiği sistem) tanımından farklı gibi görünür ise de, iki tanım da aynıdır.

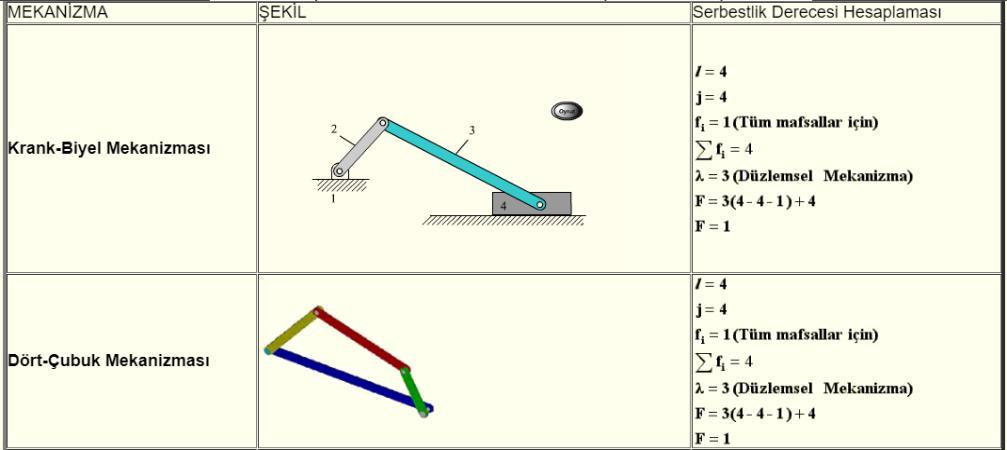
15 Mekanizmaların Serbestlik Derecesi Bir mekanizmanın serbestlik derecesi, bir mekanizmada bulunan tüm uzuvların konumunu belirlemek için gerekli olan parametre sayısıdır. Örnek olarak dört döner mafsalla bağlı dört uzuvdan oluşan ve genellikle dört-çubuk mekanizması olarak adlandırılan mekanizmayı ele alalım. açısı değeri verildiğinde her bir uzuv üzerinde iki noktanın konumu (A 0 B 0 (1 uzvu), A 0 A (2 uzvu), AB (3 uzvu) ve BB 0 (4 uzvu)) bulunabildiğine göre, bu mekanizmada bulunan tüm uzuvların konumunu belirlemek için sadece bir parametre gerekmektedir. Öyle ise, dört-çubuk mekanizmasının serbestlik derecesi 1' dir. İkinci bir örnek olarak yanda gösterilen beş döner mafsallı beş uzuvlu mekanizmayı ele alalım. tanımladığımızda A 0 AC 0 üçgeni ile ilgili gerekli bilgi elde edilmiş olur ise de, kalan kısım ABCC 0 bir dörtgen olup bu kısmın belirlenebilmesi için bir yeni parametre ( açısı) gerekecektir. Bu durumda beş çubuk mekanizmasının tüm uzuvlarının konumunu belirlemek için gereken parametre sayısı 2 olduğundan, serbestlik derecesi 2' dir.
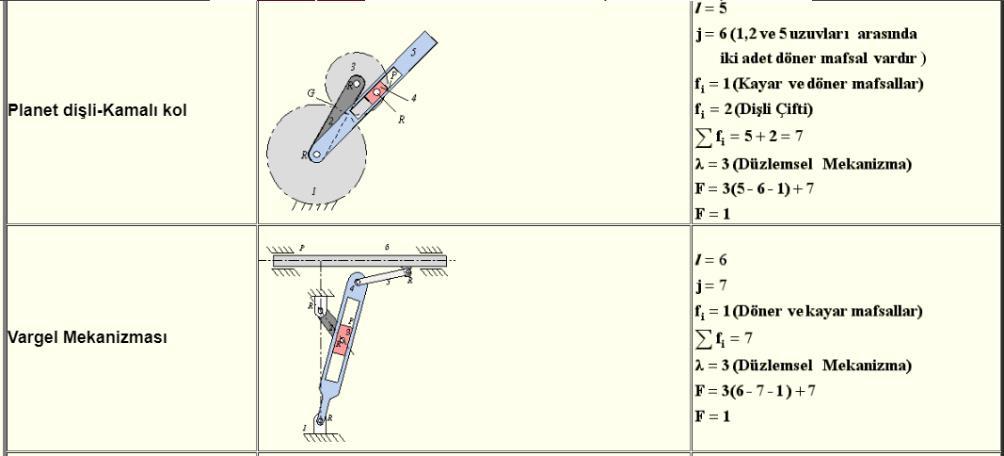
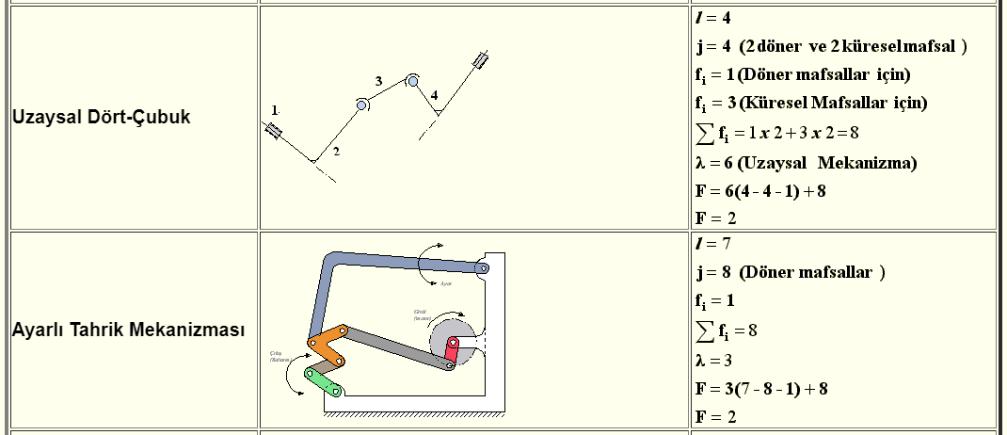
16 Mekanizmaların Serbestlik Derecesi Mekanizmaların serbestlik derecesi uzuv sayısına, mafsal sayısına ve mafsal serbestlik derecesine bağlıdır, uzuv boyutuna bağlı değildir. Öyle ise, mekanizma serbestlik derecesi ile mekanizmada bulunan mafsallların serbestlik derecesi, mafsal sayısı, uzuv sayısı arasında bir bağıntı bulmayı hedefleyebiliriz. Matematiksel olarak olaya bakmak için aşağıda verilmiş olan parametreleri tanımlayalım: =Uzay Serbestlik Derecesi = 3 düzlemsel uzaylar için = 6 genel uzay için l= Mekanizmada uzuv sayısı (sabit uzuv dahil) j = Mekanizmada mafsal sayısı f i = i mafsalının serbestlik derecesi F = Mekanizma serbestlik derecesi
17 Mekanizmaların Serbestlik Derecesi Mekanizmaların serbestlik derecesi uzuv sayısına, mafsal sayısına ve mafsal serbestlik derecesine bağlıdır, uzuv boyutuna bağlı değildir. Öyle ise, mekanizma serbestlik derecesi ile mekanizmada bulunan mafsallların serbestlik derecesi, mafsal sayısı, uzuv sayısı arasında bir bağıntı bulmayı hedefleyebiliriz. Matematiksel olarak olaya bakmak için aşağıda verilmiş olan parametreleri tanımlayalım: =Uzay Serbestlik Derecesi = 3 düzlemsel uzaylar için = 6 genel uzay için l= Mekanizmada uzuv sayısı (sabit uzuv dahil) j = Mekanizmada mafsal sayısı f i = i mafsalının serbestlik derecesi F = Mekanizma serbestlik derecesi Mekanizma serbestlik derecesi denklemi: F = λ l j 1 + j i=1 f i
18
19
20

21 Serbestlik Derecesi Denklemi Mekanizma Örnekleri Beko Yükleyici Fotoğraf günümüzde her inşaat alanında gördüğümüz beko- yükleyiciyi göstermektedir. Ön kaldırıcı ve arka kepçe kanal açma işlerinde, ön yükleyici ise toprak kazmada, kaldırıp bir kamyona koymada kullanılabilir. Ayrıca kırıcı ve tomruk kepçesi gibi farklı ekipmanlar da bu makinaya takılabilir.


22 Serbestlik Derecesi Denklemi Mekanizma Örnekleri Beko Yükleyici Ön yükleyicinin montaj resmi aşağıda görüldüğü gibidir. Ön yükleyici mekanizmasının şematik diyagramı.
23 Serbestlik Derecesi Denklemi Mekanizma Örnekleri Beko Yükleyici Mekanizmada: Uzuv sayısı= l= 9 Mafsal sayısı= j= 11 (9 döner mafsal 2 kayar mafsal) Mafsal serbestlik dereceleri= f i = 1 (tüm mafsallar için) Uzay serbestlik derecesi =λ =3 (düzlemsel hareket) Mekanizma serbestlik derecesi: F= 3 (9-11-1) + 11=2 F = 2 İki serbestlik, iki piston-silindir arasında bulunan öteleme hareketleridir. Mafsal olarak her bir piston-silindir arasinda öteleme hareketi ile birlikte dönme hareketi de mümkün ise de düzlemsel bir mekanizmada silindirlerde bu dönme hareketi gerçeklesemediginden piston silindir arasinda kayar mafsal oldugu kabul edilmelidir.
24 Kinematik Açıdan Hareketi Belirli Mekanizmalar "Kinematik açıdan hareketi belirli mekanizma" iki değişik şekilde olabilir: 1.Serbestlik derecesi bir olan (F = 1) mekanizmalar. 2.Serbestlik derecesi birden fazla olan, ancak kontrol veya tahrik edilen parameter sayısının mekanizma serbestlik derecesine eşit olan mekanizmalar. Her iki tanımdada belirlenmiş olan parametre sayısı serbestlik derecesine eşit olduğundan, bağımsız parametre değerleri belirlendiği takdirde, mekanizmada bulunan uzuvların konumu bulunabilir. Kinematik açıdan hareketi belirsiz mekanizmalar" ise, belirlenmiş olan parametre sayısının mekanizma serbestlik derecesinden az olduğu durumdur. Bu durumda mekanizmada bulunan uzuvların hareketi sadece kinematik olarak değil, etki eden dış kuvvetler ve sistem dinamiği ile belirlenecektir. Bu tür mekanizmalar uygun tasarlandığı takdirde kinematik belirli bir mekanizma gibi hareketi incelenebilir. Buna en tipik örnek taşıtlarda kullanılan diferansiyel sistemidir. Virajlarda iki tahrik tekerinin farklı hızlarda dönmesi için sistem iki serbestlik derecelidir. İki tekere etki eden moment değerine göre mekanizmanın hareketi belirlenecektir.

25 Yukarıda, Kinematik açıdan hareketi belirsiz mekanizmalar için iki örnek görülmektedir. Genellikle bu mekanizmalarda serbestliklerden birisi mekanizmanın motor ile tahrik edilmesidir. Diğer serbestlik ise bir yay ve mandal mekanizması ile kontrol edilir ve mekanizmaya etki eden kuvvet ve momentler belirli bir değerin üstünde olduğunda mekanizma çıkış uzvu sabit kalacak şekilde hareket eder. Paketleme makinalarında ve preslerde bu tür mekanizmalar çoğunlukla kullanılır.
26 Kinematik Yer Değişim Kinematik yer değişim (kinematik mübadele, kinematik inversiyon), mekanizmayı oluşturan kinematik zincir içinde farklı uzuvların sabit olmasını sağlamak veya sabit olduğunu varsayarak diğer uzuvların bu sabit olduğu varsayılan uzva göre bağıl hareketlerini incelemek için yapılan işlemdir. Bu yöntem bağıl hareket incelemede çok yararlı olduğu gibi (bu yöntem uygulanarak mekanizmaların analizi ve sentezi yapılabilmektedir), aynı zincirden farklı mekanizmaların türetilmesi içinde kullanılan yararlı bir yöntemdir.
27 Şekiller, üç döner ve bir kayar mafsala sahip düzlemsel dört uzuvlu bir zincirden kinematik yer değişim ile elde edilebilecek dört farklı mekanizmayı göstermektedir.
28 Mekanizmaların Sınıflandırılması Mekanizma tekniği konularını bir bilim dalı olarak ele alan Reuleaux'ya göre mekanizmalar 6 temel gurupta sınıflandırılabilirler Vida Mekanizmaları Çark mekanizmaları (dişli çarklar, sürtünme çarkları) Kam mekanizmaları Kol mekanizmaları Kayış-kasnak mekanizmaları Cırcır veya mandal mekanizmaları (Malta Haçı mekanizması dahil) Günümüzde ise mekanizmalar topolojik özelliklerine göre sınıflandırılırlar: Mekanizmanın çalıştığı uzay serbestlik derecesi (düzlemsel, küresel, genel uzay) Mekanizma serbestlik derecesi (genel serbestlik derecesine göre veya kritik boyutlara göre) Mekanizma uzuv sayısı Mekanizmada mafsal sayısı Mekanizmada bulunan mafsal tipleri Bir mekanizmanın tanımı için yukarıda verilen tüm parametreler geçerlidir ve mekanizmaları sınıflandırmak için kullanılabilir.
29 Yrd. Doç. Dr. Nurdan Bilgin Mekanizmaların Kinematik Analizi
30 Giriş Mekanizma dersinin önemli bir bölümü, mekanizmaların kinematik özelliklerinin bulunmasına ayrılmıştır. Kinematik özellikler olarak cisimlerin ve noktaların yer değişimi, noktaların hız ve ivmeleri, cisimlerin açısal hız ve ivmeleri ele alınmaktadır. Bugün ki dersimiz, mekanizmaların konum analizinin yapılmasıdır.
31 Tanımlar Hareketi incelemeden önce belirli terimleri tanımlamamız gerekmektedir: Konum: Bir rijit cismin (uzvun) veya cisim üzerinde bir noktanın verilmiş olan bir referansa göre yerinin belirlenmesidir. Yörünge: Bir noktanın zaman içinde aldığı konumların referans düzleminde iz düşümüdür. Yer Değişim: Referans eksenlerine göre, bir rijit cismin veya üzerinde bir noktanın konumunu değiştirmesidir. Yer değişim vektörel bir değer olup vektörün şiddeti uzunluktur (metre veya milimetre olarak ölçülür)
32 Mekanizmalarda Konum Analizi Mekanizmalarda konum analizi mekanizma serbestlik derecesine eşit sayıda parametre değeri tanımlandığında: a) uzuvların veya uzuv üzerinde bir noktanın sabit veya bir hareketli uzuv üzerinde bulunan referans eksene göre bağıl konumunun bulunmasını, b) bir uzuv üzerindeki bir noktanın başka bir uzuv üzerinde bulunduğu konumun bulunmasını, c) bağımsız parametre değerlerinin değişimine göre bir uzvun açısının değişimi veya bir noktanın diğer uzuv üzerinde çizdiği yörüngenin bulunmasını içerir. Serbestlik derecesi tanımında belirtilmiş olduğu gibi, uzuvların konumlarını belirlemek için serbestlik derecesi kadar parametrenin değeri önceden bilinmelidir. Genellikle bu parametreler bir uzvun konumunu belirlemek için kullanılan mafsal serbestlik dereceleridir. Bu mafsallara tahrik mafsalları diyeceğiz. Genellikle bu tahrik mafsalları bir hareketli uzvu sabit uzva bağladıkları için bu durumda tahrik uzvu terimi de kullanılabilir.

, bir noktanın konumunu belirlemek için rahatlıkla Bunun için dik koordinat eksenlerinden x eksenini gerçek, y eksenini ise")
33 Parçacık Kinematiği x = rcosθ, y = rsinθ r = xi + yj r = x 2 + y 2 θ = tan 1 r = r θ y x Bir noktanın konumunu belirlemek için kompleks sayılarda kullanılabilir. Kompleks sayılar vektör olmamalarına rağmen (örneğin vektörler için tanımlanmış olan vektörel çarpım veya skaler çarpım kavramları kompleks sayılar kullanıldığında bir anlam taşımaz), bir noktanın konumunu belirlemek için rahatlıkla kullanılabilir. Bunun için dik koordinat eksenlerinden x eksenini gerçek, y eksenini ise sanal eksen olarak tanımlamamız gerekir. Bu şekilde elde edilen diyagrama Gauss-Argand diagramı denir. Bu tanımla P noktasının konumu z kompleks sayısı ile:
34 Kompleks Sayılar Bir noktanın konumunu belirlemek için kompleks sayılarda kullanılabilir. Kompleks sayılar vektör olmamalarına rağmen (örneğin vektörler için tanımlanmış olan vektörel çarpım veya skaler çarpım kavramları kompleks sayılar kullanıldığında bir anlam taşımaz), bir noktanın konumunu belirlemek için rahatlıkla kullanılabilir. Bunun için dik koordinat eksenlerinden x eksenini gerçek, y eksenini ise sanal eksen olarak tanımlamamız gerekir. Bu şekilde elde edilen diyagrama Gauss- Argand diagramı denir. Bu tanımla P noktasının konumu z kompleks sayısı ile: z = x + yi Im(z) y z P Gerçek sayılar, niceliğin büyüklüğünü ifade etmek için kullanılır. θ x Re(z)

35 Gerçek bir sayı (-1) ile çarpıldığında 180 derece döner.
 dönme işlemi için i operatörü etki eder ise, ib elde edilir ib sanal sayıdır, a + i b toplamı kompleks sayıdır, ve P noktasının uzaydaki konumunu ifade etmektedir.")
36 a ve b gibi iki reel sayı düşünelim.. Eğer b üzerine 90 o (SYT) dönme işlemi için i operatörü etki eder ise, ib elde edilir ib sanal sayıdır, a + i b toplamı kompleks sayıdır, ve P noktasının uzaydaki konumunu ifade etmektedir. Oluşan düzleme Gauss-Argand, Cauchy düzlemi veya kompleks sayı düzlemi denir. r = a 2 + b 2 kompleks sayının modülüdür ve büyüklüğünü gösterir. OP ile reel eksen arasında kalan ve daima saat yelkovanı yönüne ters ölçülen açı ise θ kompleks sayının argümanıdır.

37 Kompleks Sayıların Özellikleri a. İki kompleks sayının reel ve sanal kısımları ayrı ayrı eşit ise veya modül ve argümanları aynı ise birbirlerine eşittir. b. Kompleks sayılar vektörel toplama kuralına uyarlar. İki kompleks sayının toplamı reel ve sanal kısımlarının ayrı ayrı toplamı ile elde edilir. Eğer c 1 = a 1 + ib 1 ve c 2 = a 2 + ib 2 iki kompleks sayı ise, toplam z: z = c 1 + c 2 = (a 1 + a 2 ) + i(b 1 + b 2 ) dir. c. Kompleks sayıların çarpımı ve bölümü temel cebir kurallarına göre yapılır. Burada tek fark i 2 =-1 olmasıdır.
 veya Euler denklemi: e iθ = cosθ + isinθ kullanıldığında, c kompleks sayısı: c = re")
38 Komplek sayıların şekildeki gibi gösterimi, ortogonal gösterimdir. Şekilden: a = rcosθ, b = rsinθ olduğu görüldüğünden: c = r(cosθ + isinθ) veya Euler denklemi: e iθ = cosθ + isinθ kullanıldığında, c kompleks sayısı: c = re iθ olarak yazılabilir. Bu yazılım kompleks sayının üstel gösterimi veya polar gösterimidir.

39 Bir kompleks sayının kompleks eşleniğinde reel ve sanal kısımlarının şiddeti kompleks sayı ile aynıdır, ancak kompleks eşleniğin sanal kısmı kompleks sayı ile ters işaretlidir. Yani c = a + ib ise, bu kompleks sayının kompleks eşleniği c = a ib dir. Polar gösterimde ise c = re iθ ise kompleks eşleniği c = re iθ Bir kompleks sayının kompleks eşleniği reel eksene göre kompleks sayının ayna görüntüsüdür. Kompleks eşlenik kullanılarak: r 2 = a + ib a ib = a 2 + b 2
40 Bir Rijit Cismin Kinematiği Rijit cisim bir varsayımdır. Bu varsayım bir cismin hareketini incelememiz sırasında bize önemli kolaylıklar sağlayacaktır. Bunlar: 1. Bir rijit cismin düzlemsel hareketi o cisim üzerinde bulunan her hangi iki noktanın hareketi belirlendiğinde belirlenmiştir 2. Rijit cisimlerde bir doğru üzerinde bulunan noktaların doğru yönünde hız bileşenleri eşit olmalıdır. 3. Rijit cismin kinematiği ile ilgilendiğimizden dolayı, cismin fiziksel boyutları önemli değildir.

41 Çakışan Noktalar Şimdi B noktasını göz önüne alalım. Dört nokta (B 1, B 2, B 3 ve B 4 ), o an için çakışmaktadır. B noktası 3 ve 4 uzuvları arasında bulunan döner mafsalın eksen doğrusu üzerinde olduğundan B 3 ve B 4 noktaları her konum için çakışacaktır. Buna daima çakışan noktalar diyeceğiz. Buna karşın B 2 ve B 1 noktaları sadece inceleme anında diğer iki nokta ile çakışacak, mekanizmanın başka bir konumunda B 3 ve B 4 hala çakışık iken B 2 ve B 1 in konumları farklı olacaklardır. Bu özellikte olan noktalara anlık çakışan noktalar diyeceğiz.
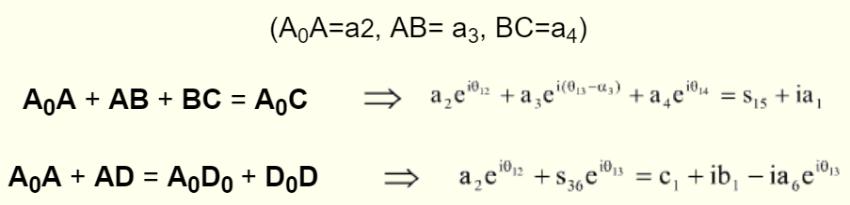
42 Mekanizmalarda Vektör Devreleri Mekanizmalarda bulunan uzuvlar ile herhangi bir düzlemsel hareket yapan cisimler arasında en önemli fark, mekanizma uzuvları hareketlerini sınırlayan ve onları diğer uzuvlara bağlayan mafsallardan dolayı, girdi parametreleri değerlerine göre sınırlandırılmış bir hareket halindedirler. Birbirlerine mafsallar ile bağlı uzuvlar kapalı çokgenler oluşturacaklardır. Bu çokgenlerin her birine devre diyeceğiz. Hareket analizinde temel yaklaşımımızın başlangıç noktası bu devreleri matematiksel olarak ifade etmek olacaktır. Şekilden görüleceği gibi, dört-çubuk mekanizmasında bir kapalı devre vardır ve bu kapalı devreyi gösteren bir vektör denklemi elde edilmiştir. Bu denklem bize oluşan zincirin kapalı bir zincir olduğunu gösterir (daima çakışan noktalar). A 0 A + AB = A 0 B 0 + B 0 Bu denkleme devre kapalılık denklemi veya vektör devre denklemi diyeceğiz. Bu denklem bir vektör denklemi olup denklemdeki değişkenler mutlaka mekanizmadaki mafsalların serbestlik dereceleri ile ilişkilidir. Bir vektör denkleminden iki skaler denklem elde edileceğinden, iki parametre değeri bu denklemler kullanılarak çözülebilir. Devre kapalılık denklemimizde üç parametre (θ 12, θ 13 veθ 14 ) olduğuna göre, eğer bu parametrelerden birisi tanımlanmış ise (θ 12 ) diğer iki parametre (θ 13 ve θ 14 ) bu vektör devre denkleminden çözülebilmelidir. Tanımlanması gereken parametre sayısı mekanizmanın serbestlik derecesine eşittir. Dikkat edilecek husus, bu parametreler arasında ilişki basit lineer bir ilişki olmayıp trigonemetrik fonksiyonları içeren karmaşık bir ilişkidir. Bu parametrelere konum değişkenleri diyeceğiz.

43
44


45

46 Kompleks Sayılar Kullanılarak Konum Analizi Kompleks sayılar, devre kapalılık denklemlerinin yazılmasında oldukça kullanılışlıdır. Bu nedenle, aynı kolaylıkla mekanizmalarda konum parametrelerinin çözümü için kullanılabilmektedirler. Bu yöntemi, dört-çubuk mekanizması üzerinde ele alacağız. Yukarıdaki şekilde görülen mekanizmanın devre kapalılık denklemi vektör formunda aşağıdaki gibi yazılabilir: A 0 A + AB = A 0 B 0 + B 0 Her bir uzva bağlı konum vektörünün uzunluğu a j, pozitif x ekseni ile yaptığı açı θ ij dersek, kompleks sayı olarak bu konum vektörü a j e iθ ij olarak gösterilebilir. Bu durumda devre kapalılık denklemi kompleks sayılar ile: a 2 e iθ 12 + a 3 e iθ 13 = a 1 + a 4 e iθ 14 (1)

47 Kompleks Sayılar Kullanılarak Konum Analizi Gerçek devre ile görüntüde oluşan devrede vektörlerin boyutları aynı görülecek ancak gerçek mekanizmada saat yelkovanına ters yönde alınan açılar, ayna görüntüde saat yelkovanı yönünde olacaklardır. Bu görüntüde oluşan devre için, devre kapalılık denklemini yazdığımızda: a 2 e iθ 12 + a 3 e iθ 13 = a 1 + a 4 e iθ 14 (2) Kompleks sayı literatüründe elde edilen bu ikinci denkleme devre kapalılık denkleminin sanal eşleniği denmektedir. Bu denklemin (1 denklemi) geçerli olduğu her durumda bu sanal eşlenikde (2 denklemi) geçerlidir.
48 Kompleks Sayılar Kullanılarak Konum Analizi Amacımız, bilinmeyen konum parametrelerini bilinenler cinsinden ifade etmek, Örneğimizde θ 12 nin verildiğini θ 13 ve θ 14 ün bulunması gerektiğini hatırlatalım. Önce θ 14 ü bulalım. İlk yapılacak iş θ 13 ü yok etmek. Bunun için bu değişkeni denklemin sol tarafında yalnız bırakalım. a 3 e iθ 13 = a 1 + a 4 e iθ 14 a 2 e iθ 12 (3) a 3 e iθ 13 = a 1 + a 4 e iθ 14 a 2 e iθ 12(4) (3) ve (4) denklemlerini taraf tarafa çarparsak a 3 2 e i θ 13 θ 13 = a 1 + a 4 e iθ 14 a 2 e iθ 12 a 1 + a 4 e iθ 14 a 2 e iθ 12 (5) e i θ 13 θ 13 = e i θ ij θ ij = e 0 = 1 Olduğu bilindiğine göre, çarpım sonucu aşağıdaki gibi elde edilir. a 3 2 = a a a a 1 a 4 e iθ 14 + e iθ 14 a 1 a 2 e iθ 12 + e iθ 12 a 2 a 4 e i θ 14 θ 12 + e i θ 14 θ 12 (6) Euler denklemine göre cos θ = e iθ 14 + e iθ 14 2 olacağından, (6) numaralı denklem: a 2 3 = a a a a 1 a 4 cos θ 14 2a 1 a 2 cos θ 12 2a 2 a 4 cos θ 14 θ 12 Olur, gerekli düzenlemeler ile K 1 cos θ 14 K 2 cos θ 12 + K 3 = cos θ 14 θ 12 (7)
49 Kompleks Sayılar Kullanılarak Konum Analizi Bu denklemde: K 1 = a 1, K a 2 = a 1 ve K 2 a 3 = a a 2 2 a a 4 4 2a 2 a 4 dir. (7) numaralı denkleme, bunu ilk tanımlayan kişiye atfen "Freudenstein denklemi" denmektedir. Bu denklem dört-çubuk mekanizmalarının sentezinde önemli rol oynar. θ 14 ve θ 12 değişkenleri arasında ilişki bu denklem ile belirlidir. Ancak verilen bir θ 12 değerine karşı gelen θ 14 açısını (7) numaralı denklemden kolayca belirlemek mevcut durumu ile mümkün değildir. Freudenstein denklemini K 1 cos θ 14 K 2 cos θ 12 + K 3 = cos θ 14 cos θ 12 + sin θ 14 sin θ 12 (8) Şeklinde yazabiliriz.
50 Kompleks Sayılar Kullanılarak Konum Analizi Trigonometrik eşitliklerinden yararlanarak cos θ 14 ve sin θ 14 terimlerini t = tan isek θ 14 2 fonksiyonu ile gösterir sin θ 14 = 2 tan θ 14 2 = 2t 1 + tan 2 θ t 2 2 cos θ 14 = 1 θ tan = 1 t2 1 + tan 2 θ t 2 2 Freudenstein denklemi: At 2 + Bt + C = 0 (9) olarak yazılabilir. Bu denklemde: A = cos θ 12 1 K 2 + K 3 K 1 B = 2 sin θ 12 C = cos θ K 2 + K 3 + K 1 Not: bir açının yarısını kullanarak açının tüm trigonemetrik fonksiyonlarını sadece yarım açının tanjant fonksiyonu ile ifade edilmesi yarım tanjant yöntemi olarak bilinir
51 Kompleks Sayılar Kullanılarak Konum Analizi Dikkat edilir ise, θ 12 bağımsız parametre değeri ve uzuv boyutları biliniyor ise A,B ve C parametre değerlerini hesaplayabiliriz. (9) numaralı denklem t = θ tan 14 2 e göre ikinci dereceden bir denklemdir ve çözümü: θ t = tan 14 2 = B ± B2 4AC 2A olacaktır. Bilinmeyen θ 14 açısı bu durumda θ 14 = 2 tan 1 B ± B2 4AC (10) 2A olur. (10) denklemi diskriminantın artı veya eksi işaret almasına göre iki değişik θ 14 değeri verecektir. Bu mekanizmanın iki farklı şekilde monte edilmesi ile ilgilidir. Son olarak, bulunan θ 14 değeri ve başlangıçta bilinen θ 12 değeri kullanılarak θ 13 de bulunur.
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN
 Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği DR. ÖĞR. ÜYESİ NURDAN BİLGİN Ders Politikası Öğretim Üyesi: Dr. Öğr. Üyesi Nurdan Bilgin, Oda No: 309, e-mail:nurdan.bilgin@omu.edu.tr Ders Kitabı: Mekanizma Tekniği, Prof. Dr. Eres Söylemez
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU -1-
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU -1- 2 Mek. Tek. DERSİN İÇERİĞİ DERSİN AMACI Mekanizma Tekniğinde Ana Kavramlar Eleman Çiftleri Kinematik Zincirler Serbestlik Derecesi Üç Çubuk Mekanizmaları
MAK Makina Dinamiği - Ders Notları -1- MAKİNA DİNAMİĞİ
 MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MAK 0 - Makina Dinamiği - Ders Notları -- MAKİNA DİNAMİĞİ. GİRİŞ.. Konunun Amaç ve Kapsamı Makina Dinamiği, uygulamalı mekaniğin bir bölümünü meydana getirir. Burada makina parçalarının hareket kanunları,
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta)
") MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
MEKANİK SİSTEMLERİN DİNAMİĞİ (1. Hafta) TEMEL KAVRAMLAR Giriş Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır.
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin MAKİNALARDA KUVVET ANALİZİ Mekanizmalar, sadece kinematik özellikleri karşılamak üzere tasarlandıklarında, bir makinenin parçası olarak kullanıldığında
Makina Dinamiği. Yrd. Doç. Dr. Semih Sezer.
 Yrd. Doç. Dr. Semih Sezer Makina Dinamiği sezer@yildiz.edu.tr Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Yrd. Doç. Dr. Semih Sezer Makina Dinamiği sezer@yildiz.edu.tr Dersin İçeriği : Makinaların dinamiğinde temel kavramlar, Kinematik ve dinamik problemlerin tanımı, Mekanik sistemlerin matematik modeli, Makinalarda
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
BÖLÜM 1 1- KOMPLEKS (KARMAŞIK) SAYILAR 1-1 KARMAŞIK SAYILAR VE ÖZELLİKLERİ
 SAYILAR 1-1 KARMAŞIK SAYILAR VE ÖZELLİKLERİ") BÖLÜM - KOMPLEKS (KARMAŞIK) SAYILAR - KARMAŞIK SAYILAR VE ÖELLİKLERİ ax + bx +c ikinci derece denkleminin < iken reel köklerinin olmadığını biliyoruz. Örneğin x + denkleminin reel sayılar kümesinde çözümü
BÖLÜM - KOMPLEKS (KARMAŞIK) SAYILAR - KARMAŞIK SAYILAR VE ÖELLİKLERİ ax + bx +c ikinci derece denkleminin < iken reel köklerinin olmadığını biliyoruz. Örneğin x + denkleminin reel sayılar kümesinde çözümü
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
1. HAFTA. Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler.
 1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
1. HAFTA Statik, uzayda kuvvetler etkisi altındaki cisimlerin denge koşullarını inceler. Statikte üç temel büyüklük vardır. Uzay: Fiziksel olayların meydana geldiği geometrik bir bölgedir. İncelenen problemin
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
STATİK KUVVET ANALİZİ (2.HAFTA)
") STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
STATİK KUVVET ANALİZİ (2.HAFTA) Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin hesaplanması statik hesaplamalarla yapılır.
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
ÜÇ ÇUBUK MEKANİZMASI
 ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
ÜÇ ÇUBUK MEKNİZMSI o l min l, lmaks B l,, B o Doç. Dr. Cihan DEMİR Yıldız Teknik Üniversitesi Dört çubuk mekanizmalarının uygulama alanı çok geniş olmasına rağmen bu uygulamalar üç değişik gurupta toplanabilir.
TEMEL MEKANİK 5. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 5 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
KONU 3. STATİK DENGE
 KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
KONU 3. STATİK DENGE 3.1 Giriş Bir cisme etki eden dış kuvvet ve momentlerin toplamı 0 ise cisim statik dengededir denir. Kuvvet ve moment toplamlarının 0 olması sırasıyla; ötelenme ve dönme denge şartlarıdır.
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi 1 Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
TEKNOLOJİNİN BİLİMSEL İLKELERİ. Öğr. Gör. Adem ÇALIŞKAN
 TEKNOLOJİNİN BİLİMSEL İLKELERİ 4 Skaler: Fiziki büyüklükler SKALER BÜYÜKLÜK SEMBOLÜ BİRİMİ Kütle m Kilogram Hacim V m 3 Zaman t Saniye Sıcaklık T Kelvin Sadece sayısal değer ve birim verilerek ifade edilen
TEKNOLOJİNİN BİLİMSEL İLKELERİ 4 Skaler: Fiziki büyüklükler SKALER BÜYÜKLÜK SEMBOLÜ BİRİMİ Kütle m Kilogram Hacim V m 3 Zaman t Saniye Sıcaklık T Kelvin Sadece sayısal değer ve birim verilerek ifade edilen
 5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLE 1. GİİŞ - Skalerler ve ektörler - Newton Kanunları 2. KUET SİSTEMLEİ - İki Boyutlu
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Doç. Dr. Bilge DORAN
 Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
MÜHENDİSLİK MEKANİĞİ (STATİK)
") MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
MÜHENDİSLİK MEKANİĞİ (STATİK) Prof. Dr. Metin OLGUN Ankara Üniversitesi Ziraat Fakültesi Tarımsal Yapılar ve Sulama Bölümü HAFTA KONU 1 Giriş, temel kavramlar, statiğin temel ilkeleri 2-3 Düzlem kuvvetler
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (4. Hafta)
") KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
Ödev 1. Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N
 Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
Ödev 1 Ödev1: 600N luk kuvveti u ve v eksenlerinde bileşenlerine ayırınız. 600 N 1 600 N 600 N 600 N u sin120 600 N sin 30 u 1039N v sin 30 600 N sin 30 v 600N 2 Ödev 2 Ödev2: 2 kuvvetinin şiddetini, yönünü
MEKANİZMA TEKNİĞİ (3. HAFTA)
") MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
MEKANİZMA TEKNİĞİ (3. HAFTA) STATİĞİN TEMEL İLKELERİ VE VEKTÖR MATEMATİĞİ Mekanik sistemler üzerindeki kuvvetler denge halindeyse sistem hareket etmeyecektir. Sistemin denge hali için gerekli kuvvetlerin
Makina Dinamiği MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ
 MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
MEKANİZMALARDA HIZ VE İVMELERİN BELİRLENMESİ Mekanizmalar daha çok düzlemsel mekanizmalardan meydana gelir. Hacimsel mekanizmalara çok az rastlanır. Düzlemsel mekanizma denilince derinliği olmayan veya
TEKNOLOJİNİN BİLİMSEL İLKELERİ
 TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
TEKNOLOJİNİN BİLİMSEL İLKELERİ Öğr. Gör. Fatih KURTULUŞ 4.BÖLÜM: STATİK MOMENT - MOMENT (TORK) Moment (Tork): Kuvvetin döndürücü etkisidir. F 3 M ile gösterilir. Vektörel büyüklüktür. F 4 F 3. O. O F 4
3. KUVVET SİSTEMLERİ
 3. KUVVET SİSTEMLERİ F F W P P 3.1 KUVVET KAVRAMI VE ETKİLERİ Kuvvet, bir cisme etki eden yapısal yüklerdir. Kuvvet Şiddeti, yönü ve uygulama noktası olan vektörel bir büyüklüktür. Bir cismin üzerine uygulanan
3. KUVVET SİSTEMLERİ F F W P P 3.1 KUVVET KAVRAMI VE ETKİLERİ Kuvvet, bir cisme etki eden yapısal yüklerdir. Kuvvet Şiddeti, yönü ve uygulama noktası olan vektörel bir büyüklüktür. Bir cismin üzerine uygulanan
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Mekanizma Tekniği. Fatih ALİBEYOĞLU Ahmet KOYUNCU
 Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU KİNEMATİK DİYAGRAM 2 Kinematik Diyagram, mekanizmaların uzuvlarını şekil ve ölçülerinden ziyade şematik olarak göstermeyi ve uzuvların mafsallarla bağlanabilirliğini
Mekanizma Tekniği Fatih ALİBEYOĞLU Ahmet KOYUNCU KİNEMATİK DİYAGRAM 2 Kinematik Diyagram, mekanizmaların uzuvlarını şekil ve ölçülerinden ziyade şematik olarak göstermeyi ve uzuvların mafsallarla bağlanabilirliğini
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
3-1 Koordinat Sistemleri Bir cismin konumunu tanımlamak için bir yönteme gereksinim duyarız. Bu konum tanımlaması koordinat kullanımı ile sağlanır.
 Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
EĞRİSEL HAREKET : Silindirik Bileşenler
 EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
KUVVETLER VEKTÖRDÜR BU YÜZDEN CEBİRSEL VEKTÖR TEKNİKLERİ KULLANMALIYIZ
 Rijit Cisim Dengesi KUVVETLER VEKTÖRDÜR BU YÜZDEN CEBİRSEL VEKTÖR TEKNİKLERİ KULLANMALIYIZ KUVVET SİSTEMİ 2 B KUVVET SİSTEMLERİ Detaylar 1- KO-LİNEER 2- BİR NOKTADA BULUŞAN (KONKÜRENT) 3- PARALEL 4- GENEL
Rijit Cisim Dengesi KUVVETLER VEKTÖRDÜR BU YÜZDEN CEBİRSEL VEKTÖR TEKNİKLERİ KULLANMALIYIZ KUVVET SİSTEMİ 2 B KUVVET SİSTEMLERİ Detaylar 1- KO-LİNEER 2- BİR NOKTADA BULUŞAN (KONKÜRENT) 3- PARALEL 4- GENEL
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Elektromanyetik Dalga Teorisi
 Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Elektromanyetik Dalga Teorisi Ders-2 Dalga Denkleminin Çözümü Düzlem Elektromanyetik Dalgalar Enine Elektromanyetik Dalgalar Kayıplı Ortamda Düzlem Dalgalar Düzlem Dalgaların Polarizasyonu Dalga Denkleminin
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
Gerilme Dönüşümleri (Stress Transformation)
") Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
Gerilme Dönüşümleri (Stress Transformation) Bubölümdebirnoktayaetkiyen vebelli bir koordinat ekseni/düzlemi ile ilişkili gerilme bileşenlerini, başka bir koordinat sistemi/başka bir düzlem ile ilişkili
BURSA TECHNICAL UNIVERSITY (BTU) 2 DİŞLİ ÇARKLAR I: GİRİŞ
 2 DİŞLİ ÇARKLAR I: GİRİŞ") Makine Elemanları 2 DİŞLİ ÇARKLAR I: GİRİŞ 1 Bu bölümden elde edilecek kazanımlar Güç Ve Hareket İletim Elemanları Basit Dişli Dizileri Redüktörler Ve Vites Kutuları : Sınıflandırma Ve Kavramlar Silindirik
Makine Elemanları 2 DİŞLİ ÇARKLAR I: GİRİŞ 1 Bu bölümden elde edilecek kazanımlar Güç Ve Hareket İletim Elemanları Basit Dişli Dizileri Redüktörler Ve Vites Kutuları : Sınıflandırma Ve Kavramlar Silindirik
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
Gerilme Dönüşümü. Bölüm Hedefleri
 Gerilme Dönüşümü Bölüm Hedefleri Bu bölümde, belirli bir koordinat sisteminde tanımlı gerilme bileşenlerinin, farklı eğimlere sahip koordinat sistemlerine nasıl dönüştürüleceği üzerinde durulacaktır. Gerekli
Gerilme Dönüşümü Bölüm Hedefleri Bu bölümde, belirli bir koordinat sisteminde tanımlı gerilme bileşenlerinin, farklı eğimlere sahip koordinat sistemlerine nasıl dönüştürüleceği üzerinde durulacaktır. Gerekli
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Doç.Dr. Cesim ATAŞ MEKANİK ŞEKİL DEĞİŞTİREN CİSİMLER MEKANİĞİ DİNAMİK
 STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
Uzayda iki doğrunun ortak dikme doğrusunun denklemi
 Uzayda iki doğrunun ortak dikme doğrusunun denklemi Uzayda verilen d 1 ve d aykırı doğrularının ikisine birden dik olan doğruya ortak dikme doğrusu denir... olmak üzere bu iki doğru denkleminde değilse
Uzayda iki doğrunun ortak dikme doğrusunun denklemi Uzayda verilen d 1 ve d aykırı doğrularının ikisine birden dik olan doğruya ortak dikme doğrusu denir... olmak üzere bu iki doğru denkleminde değilse
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı. Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
STATIK VE MUKAVEMET 3. Rijit cisimlerin dengesi, Denge denklemleri, Serbest cisim diyagramı Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları
STATİK MÜHENDİSLİK MEKANİĞİ. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN. Behcet DAĞHAN
 Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLER 1. GİRİŞ - Skalerler ve Vektörler - Newton Kanunları. KUVVET SİSTEMLERİ - İki Boutlu
Statik Ders Notları Sınav Soru ve Çözümleri DAĞHAN MÜHENDİSLİK MEKANİĞİ STATİK MÜHENDİSLİK MEKANİĞİ STATİK İÇİNDEKİLER 1. GİRİŞ - Skalerler ve Vektörler - Newton Kanunları. KUVVET SİSTEMLERİ - İki Boutlu
TORK VE DENGE. İçindekiler TORK VE DENGE 01 TORK VE DENGE 02 TORK VE DENGE 03 TORK VE DENGE 04. Torkun Tanımı ve Yönü
 İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
İçindekiler TORK VE DENGE TORK VE DENGE 01 Torkun Tanımı ve Yönü Torka Sebep Olan ve Olmayan Kuvvetler Tork Bulurken İzlenen Yöntemler Çubuğa Uygulanan Kuvvet Dik Değilse 1) Kuvveti bileşenlerine ayırma
BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER
 BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER b) İkinci süreç eğik atış hareketine karşılık geliyor. Orada örendiğin problem çözüm adımlarını kullanarak topun sopadan ayrıldığı andaki hızını bağıntı olarak
BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER b) İkinci süreç eğik atış hareketine karşılık geliyor. Orada örendiğin problem çözüm adımlarını kullanarak topun sopadan ayrıldığı andaki hızını bağıntı olarak
BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ
 1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
1 BTÜ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI DERSİ ROTORLARDA STATİK VE DİNAMİKDENGE (BALANS) DENEYİ 1. AMAÇ... 2 2. GİRİŞ... 2 3. TEORİ... 3 4. DENEY TESİSATI... 4 5. DENEYİN YAPILIŞI... 7 6.
TORK VE DENGE 01 Torkun Tanımı ve Yönü
 TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
TORK VE DENGE 01 Torkun Tanımı ve Yönü Kuvvetin döndürme etkisine tork ya da moment denir. Bir kuvvetin bir noktaya göre torku; kuvvet ile dönme noktasının kuvvete dik uzaklığının çarpımına eşittir. Moment
TEMEL MEKANİK 6. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 6 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
STATİĞİN TEMEL PRENSİPLERİ
 1.1. Temel Kavramlar ve Tanımlar Mühendislik mekaniği: Kuvvet etkisi altındaki cisimlerin denge veya hareket koşullarını inceleyen bilim dalı Genel olarak mühendislik mekaniği Sert (rijit) katı cisimlerin
1.1. Temel Kavramlar ve Tanımlar Mühendislik mekaniği: Kuvvet etkisi altındaki cisimlerin denge veya hareket koşullarını inceleyen bilim dalı Genel olarak mühendislik mekaniği Sert (rijit) katı cisimlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
 9.1 9.2 9.3 9.4 9.5 9.6 Uzayda Serbestlik Derecesi Rijit Cismin Uzayda Dengesi Bir Uzay Kuvvetin Bileşenleri Bir Noktada Kesişen Uzay Kuvvetlerde Bileşke Bir Eksene Göre Statik Moment Kuvvetler Sistemini
9.1 9.2 9.3 9.4 9.5 9.6 Uzayda Serbestlik Derecesi Rijit Cismin Uzayda Dengesi Bir Uzay Kuvvetin Bileşenleri Bir Noktada Kesişen Uzay Kuvvetlerde Bileşke Bir Eksene Göre Statik Moment Kuvvetler Sistemini
Matematikte karşılaştığınız güçlükler için endişe etmeyin. Emin olun benim karşılaştıklarım sizinkilerden daha büyüktür.
 - 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
- 1 - ÖĞRENME ALANI CEBİR BÖLÜM KARMAŞIK SAYILAR ALT ÖĞRENME ALANLARI 1) Karmaşık Sayılar Karmaşık Sayıların Kutupsal Biçimi KARMAŞIK SAYILAR Kazanım 1 : Gerçek sayılar kümesini genişletme gereğini örneklerle
MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR
 MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR DÜZLEMSEL MEKANİZMALAR Güç ve hareket aktarımında kullanılan önemli makine elemanlarındadır. Düzlemsel Mekanizma Tanımı Mekanik parçaların bir araya getirilmesiyle
MEKANİZMA YAPIMI DÜZLEMSEL MEKANİZMALAR DÜZLEMSEL MEKANİZMALAR Güç ve hareket aktarımında kullanılan önemli makine elemanlarındadır. Düzlemsel Mekanizma Tanımı Mekanik parçaların bir araya getirilmesiyle
Mukavemet-II PROF. DR. MURAT DEMİR AYDIN
 Mukavemet-II PROF. DR. MURAT DEMİR AYDIN KAYNAK KİTAPLAR Cisimlerin Mukavemeti F.P. BEER, E.R. JOHNSTON Mukavemet-2 Prof.Dr. Onur SAYMAN, Prof.Dr. Ramazan Karakuzu Mukavemet Mehmet H. OMURTAG 1 SİMETRİK
Mukavemet-II PROF. DR. MURAT DEMİR AYDIN KAYNAK KİTAPLAR Cisimlerin Mukavemeti F.P. BEER, E.R. JOHNSTON Mukavemet-2 Prof.Dr. Onur SAYMAN, Prof.Dr. Ramazan Karakuzu Mukavemet Mehmet H. OMURTAG 1 SİMETRİK
MAT355 Kompleks Fonksiyonlar Teorisi I Hafta 2. yapılırsa bu durumda θ ya z nin esas argümenti denir ve Argz ile gösterilir. argz = Argz + 2nπ, n Z
 MAT355 Kompleks Fonksiyonlar Teorisi I Hafta 1.. Kutupsal Formda Gösterim z x + iy vektörünün pozitif reel eksenle yaptığı açıya θ diyelim. cos θ x, sin θ y ve buradan tan θ y θ arctan y olup θ ya z z
MAT355 Kompleks Fonksiyonlar Teorisi I Hafta 1.. Kutupsal Formda Gösterim z x + iy vektörünün pozitif reel eksenle yaptığı açıya θ diyelim. cos θ x, sin θ y ve buradan tan θ y θ arctan y olup θ ya z z
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1
 İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1") DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
TEKNOLOJİNİN BİLİMSEL İLKELERİ. Öğr. Gör. Adem ÇALIŞKAN
 TEKNOLOJİNİN BİLİMSEL İLKELERİ 5 Ağırlık merkezi STATİK Bir cisim moleküllerden meydana gelir. Bu moleküllerin her birine yer çekimi kuvveti etki eder. Bu yer çekimi kuvvetlerinin cismi meydana getiren
TEKNOLOJİNİN BİLİMSEL İLKELERİ 5 Ağırlık merkezi STATİK Bir cisim moleküllerden meydana gelir. Bu moleküllerin her birine yer çekimi kuvveti etki eder. Bu yer çekimi kuvvetlerinin cismi meydana getiren
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK
 Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Bölüm 4. İki boyutta hareket
 Bölüm 4 İki boyutta hareket İki boyutta Hareket Burada konum, hız ve ivmenin vektör karakteri daha öne çıkacaktır. İlk olarak sabit ivmeli hareketler göz önünde bulundurulacak. Düzgün dairesel hareket
Bölüm 4 İki boyutta hareket İki boyutta Hareket Burada konum, hız ve ivmenin vektör karakteri daha öne çıkacaktır. İlk olarak sabit ivmeli hareketler göz önünde bulundurulacak. Düzgün dairesel hareket
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel