5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ
|
|
|
- Elmas Akkoyun
- 8 yıl önce
- İzleme sayısı:
Transkript
1 5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan kapıların kullanımının kolay olması istenir. Öyle ki elleri eşya, bavul ve benzeri şeylerle dolu bir halde kapının önüne gelen bir kişi, yardım görmeden ve ellerindeki eşyaları indirmeden içeri girebilmelidir. Bunun sağlanması için kapının; gelen birisinin olduğunu fark edip kendiliğinden açılması ve geçiş bittiği zaman yine kendiliğinden otomatik olarak kapanması, kullanım açısından oldukça elverişli ve estetik bir uygulama sağlar. Günümüz teknolojisinde bu tür bir uygulama oldukça basit bir yöntemle yapılabilmektedir. Fischertechnik robot setine ait küçük boyuttaki parçaların otomatik bir kapıyı kontrol etmesi amacıyla montajının adım adım öğretilmesi ve sistem kontrolünün bir bilgisayar yardımı ile yapılması, bu çalışmanın amacıdır. 1. Fonksiyon İnsan trafiğinin yoğun olduğu giriş-çıkışı sağlayan bir kapının otomatik olarak kontrolünün yapılması gerekmektedir. Bunun için kapının her iki tarafından yaklaşacak kişi veya canlının algılayıcılar yardımıyla saptanıp, kapının otomatik olarak açılması sağlanmalıdır. Geçiş işlemi tamamlandıktan sonra kapının tekrar kapanması istenilen bir özelliktir. Aynı zamanda geçişin sürekli olduğu anlarda kapının da sürekli olarak açık kalması gerekir. 1889

2 2. Malzemelerin Seçimi Tasarlanan projenin robot montajının yapılmasında gerekli olacak önemli parçalar şunlardır. - Motorlar - Fotorezistör (LDR) - Lambalar - Anahtarlar 3. Kontrol Önemli bir işlem, kapının kapalı kalmasıdır. Kapının kapalı kalması, önceden belirlenmiş referans bir konuma göre planlanmıştır. Referans noktaya göre kapının kapalı olduğu durum saptanmıştır. Aynı şekilde kapının açık durumunun saptanması için de önceden belirli bir nokta tespit edilmiştir. İşlemler : 4. Kapının Otomatik Olarak Açılıp Kapanması İçin Yapılacak 1. Basamak : Bir kişi veya hareketli bir cismin kapının açılmasını gerektirecek mesafede bulunup bulunmadığının belirlenmesi. 2. Basamak : Kapının açılmasını gerektirecek mesafede birinin olması durumunda kapının açılmasının sağlanması. 3. Basamak : Geçiş tamamlandığında bunun kapıya bildirilmesi ve kapının kapatılması. 1890

3 5. Yerleşim Planı Montajı gerçekleştirilen sistemin konumu şematik olarak Şekil 1 de verilmiştir. Tasarlanan sistemin çalışabilmesi için; iki adet fotosele ihtiyaç vardır. Bunun için fotorezistörlerin önüne ışık kaynağı konulmuştur. Lambalardan birinin M3, diğerinin M4 ile bağlantısı vardır. Fotoresiztörlerden biri E3, diğeri ise E4 ile bağlantı halindedir. Her fotorezistöre ait ışık, fotorezistörü görüyorsa E3 ve E4'ün lojik değeri 1 dir. Işıklar ait oldukları fotorezistörü görmüyorsa, lojik değerleri 0 olacaktır. Sistemde ayrıca kapının birbirinden ayrı iki parçasının aynı anda farklı yönlerde hareket etmesini sağlayan M1 ve M2 motorları kullanılmıştır. Robotu kontrol etmek için dört adet anahtar kullanılmıştır. Fonksiyonları şunlardır : E1 : Kapının açık olduğu pozisyonun tespitini sağlayan anahtar. E2 : Robotun başlama pozisyonunu belirler. Bu pozisyonda kapı kapalı konumdadır. E3 : Fotoselin 0 veya 1 konumlarını göstermektedir. Eğer 0 ise ışığın önü kesik, 1 ise ışık fotorezistöre düşüyor demektir. E4 : Fotoselin 0 veya 1 konumlarını göstermektedir. Eğer 0 ise ışığın önü kesik, 1 ise fotorezistöre ışık düşüyor demektir. 6. Fiziksel Tanımlamalar Sembol Açıklama M1 M2 M3 M4 Kapının bir parçasının ileri geri hareketini sağlayan motor Kapının bir parçasının ileri geri hareketini sağlayan motor Işık Işık 1891

4 Hareketler Motor Anahtarlar Sola dönme M1 Sağa dönme M2 Başlama noktası Fotosel Fotosel Işık Işık E1 E2 E2 E3 E4 M3 M4 7. Malzeme Listesi Montajda kullanılan malzemeler ve kaçar adet kullanıldıkları aşağıda verilmiştir. R1 : 5mm' lik yapı bloğu X4 R2: Lamba, LDR ile alt soketler ve üst kapakları X4 R3: Mikro anahtar X2 1892

5 R7 : Kama X10 R4 : Motor X2 R5 : Soket kutusu X1 R8 : Açısal yapı bloğu X2 R9 : 15mm' lik çift dilli yapı bloğu X4 R10 : 30mm'lik yapı bloğu X6 R11 : LDR bloğu X2 R12 : 75mm' lik Alüminyum çubuk X2 1893

6 R6 : Ara birim X1 R13 : Kablo fişlerinin bağlantı kabloları ile montajı 1894



7 R14 : 90mm' lik alüminyum çubuk X1 R15: Motor dişli kutusu X2 R16: Eş açılı tek dilli yapı bloğu X2 R17: 15 mm lik tek dilli yapı bloğu X7 R18: 7.5 mm lik yapı bloğu X2 R19: Dişli ray X4 R20: Köşebent X2 1895

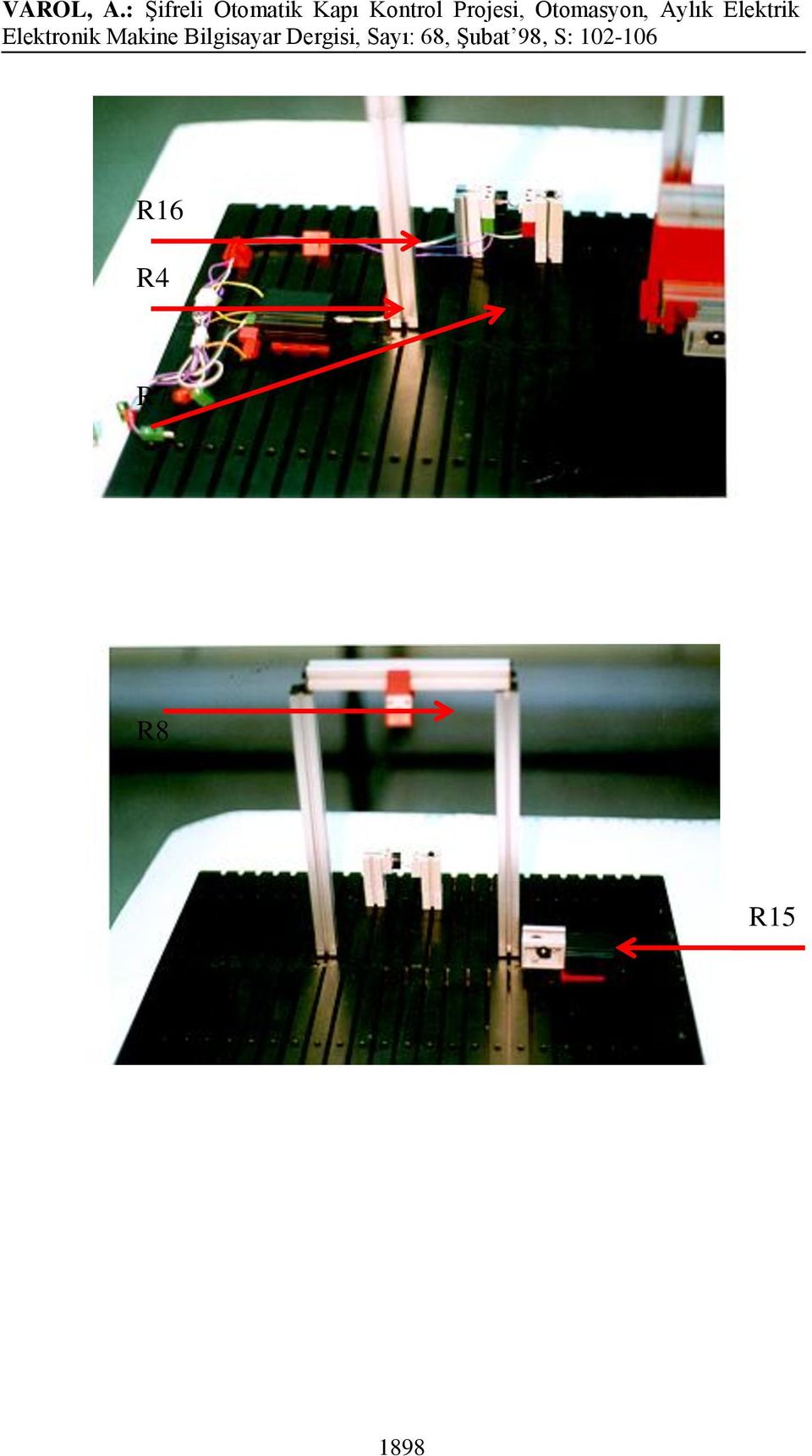
8 R21: 210 mm lik alüminyum çubuk X2 R22: Panel kapağı X6 8. Montaj Otomatik kapı kontrolünü sağlayacak sistemi kurmak için yukarıda belirtilen malzemeler kullanılarak, adım adım montaj yapılması gerekir. Aşağıda farklı resimler üzerinde, montajın safhaları gösterilmiştir. Kullanılan malzemeler, resimler üzerinde ok işareti ile gösterilmiştir. 1896

9 R14 R21 R2 R1 1 R10 R10 R1 R2 1897

10 R16 R4 R7 R8 R
11 R17 R19 R12 R22 R18 R

12 R9 R3 R13 R

13 R5 R13 R6 1901

14 9. Program Yazılımı ve Açıklaması Otomatik kapı kontrol projesinin bilgisayarla kumanda edilmesini sağlayan LOGO programlama diliyle yazılmış program ve çalışması aşağıda anlatılmıştır. TO KAP MCW M3 MCW M4 IF EQUALP STATUS E2 1 [KAPA] IF EQUALP STATUS E1 0 [MSTOP M1 MSTOP M2] IF EQUALP STATUS E5 0 [ACIK] IF EQUALP STATUS E4 0 [ACIK] KAP END Yukarıdaki program parçası; kontrol programının ana programını oluşturmaktadır. İlk satır, program parçacığının ismini KAP olarak tanımlamak içindir. Alt satırlarda yer alan MCW komutuyla M3 ve M4 çıkışlarına bağlanmış olan lambalara bir darbe boyunca lojik 1 uygulanmasını sağlamaktadır. Böylece bu lambalar bir darbe süresinde ışık verir. Sonraki satırda yer alan IF komutuyla programın sürekliliği sırasında kapının durumunun tespitini yapmak içindir. Şayet kapı herhangi bir başlangıç anında açık bulunuyorsa, kapının asıl başlangıç noktası olan kapalı konumuna dönmesini sağlayan KAPA adlı alt programa dallanmasını gerçekleştirir. Sonraki satırda yine süreklilik durumunda kapının herhangi bir 1902

15 başlangıç anını kontrol eder. Şayet kapı kapalı ise, kapıyı kapatan motorların çalışmamasını sağlar. Sonraki iki satır ise kapının her iki tarafına yerleştirilen fotorezistörlerin durumunu algılamak, dolayısıyla kapının açılmasını gerektirecek mesafede hareketli birinin olup olmadığını kontrol etmek içindir. Şayet kapının açılmasına sebep (IF EQUALP STATUS E5 0 [ACIK], IF EQUALP STATUS E4 0 [ACIK]) olabilecek bir hareket mevcut ise, program ACIK isimli alt programa dallanarak kapının açılmasını sağlayacak program dizesini işletir. Daha sonraki satır ise programın sürekliliğini sağlamak için kendi içinde yer aldığı KAP isimli ana programı tekrar çağırır. Böylece lambalar bir darbe boyunca yanmasına rağmen sürekli ışık veriyormuş gibi görünür. TO ACIK IF EQULP STATUS E1 0 [KAPA] MCW M1 MCW M2 WATCH E1 MSTOP M1 MSTOP M2 IF EQUALP STATUS E4 0 [DD] IF EQUALP STATUS E5 0 [DDD] IF EQUALP STATUS E4 1 [KAPA] IF EQUALP STATUS E5 1 [KAPA] 1903
 olabilecek bir hareket mevcut ise, program ACIK isimli alt programa dallanarak kapının açılmasını")
16 END Yukarıdaki program parçacığı kapının açılmasını sağlayan alt programdır. İlk satırda program parçacığına ACIK ismi verilmiştir. Sonraki satırda kapının konumu kontrol edilmiştir. Şayet kapı açık ise kapının kapatılması için KAPA isimli alt programa dallanılmıştır. Sonraki iki satırda kapının kapalı olması halinde kapıyı açan M1 ve M2 motorları yine bir darbe süresince çalıştırılmıştır. Ancak alt satırdaki komut sayesinde E1 anahtarı konum değiştirinceye kadar motorların çalışmasını sağlar. Sadece anahtar konum değiştirdiğinde alt satıra geçer. Alt satırda (MSTOP M1) ise anahtar konumunu değiştirdiği için motorların durmasını sağlar. Yani bu durumda kapı açılmıştır. Daha sonra gelen satırlarda ise kapının açık kalmasını gerektirecek bir hareketin olup olmadığı kontrol edilir. Şayet bir hareketlilik varsa kapının ayrı ayrı iki tarafı için kapının sürekli açık kalmasını sağlayan DD ve DDD alt programlarına dallanır. Yine hareketlilik olmaması durumunda kapının kapanmasını sağlayacak alt program çağırılır. TO KAPA IF EQUALP STATUS E4 0 [ACIK] IF EQUALP STATUS E5 0 [ACIK] IF EQUALP STATUS E2 0 [MSTOP M1 MSTOP M2 KAP] MCCW M1 MCCW M2 IF EQUALP STATUS E2 1 [KAPA] 1904

17 MSTOP M1 MSTOP M2 END Yukarıdaki program parçacığı kapının kapanmasını sağlar. İlk satırda programa ismi KAPA olarak verilmiştir. Altındaki iki satırda yine kapı civarındaki hareketlilik algılanarak giriş çıkışın olması halinde kapının tekrar açılmasını sağlamak için kapıyı açan alt program çağrılmıştır. Bu sayede kapı kapanmak üzereyken bir giriş yapılsa bile, kapı bulunduğu pozisyondan geriye doğru hareket edip tekrar açılır. Altındaki satırda kapının konumunu kontrol etmek için E2 anahtarı gözlenir. Şayet kapı zaten kapalıysa tekrar kapatılmaya çalışılmasını engeller. Daha sonra kapı zaten kapalı olduğu için ana programa geri döner. Kapının açık olması halinde M1 ve M2 motorları kapıyı kapatacak yönde tahrik edilir. Yine bir darbe şeklinde sinyal uygulandığı için sürekliliği sağlamak için devamlı kapının durumu kontrol edildiği halde KAPA isimli program kendisini çağırır. Kapı kapandığında hemen alt satırdaki MSTOP komutuyla motorlar durdurulur. Alt program bittiği için ana program işlemeye devam eder. TO DD IF EQUALP STATUS E4 0 [MSTOP M1 MSTOP M2] IF EQUALP STATUS E4 1 [KAPA] DD END 1905

18 Yukarıdaki DD isimli alt program kapının bir tarafındaki hareketliliği algıladıktan sonra trafik yoğunluğu durumunda sürekli kontrol altında kapının yoğun trafik sona erinceye kadar açık kalmasını sağlar. Yine süreklilik sağlamak için program kendi kendisini çağırır. TO DDD IF EQUALP STATUS E5 0 [MSTOP M1 MSTOP M2] IF EQUALP STATUS E5 1 [KAPA] DDD END Yukarıdaki alt programda üsteki gibi trafiğin yoğun olduğu durumda kapının diğerine göre ters taraftaki algılayıcıyı sürekli kontrol ederek kapının açık kalmasını sağlar. Tabi bu programda kendi kendisini çağırarak sürekliliği sağlar. Kaynaklar: [1] Otomatik Kapı Kontrol Projesi, F.Ü. Teknik Eğitim Fakültesi, Elektronik-Bilgisayar Eğitimi Bölümü, Proje no: III,
![TO DDD IF EQUALP STATUS E5 0 [MSTOP M1 MSTOP M2] IF EQUALP STATUS E5 1 [KAPA] DDD END Yukarıdaki alt programda üsteki gibi trafiğin yoğun olduğu durumda kapının diğerine göre ters](/docs-images/46/6235212/images/page_18.jpg "taraftaki algılayıcıyı sürekli kontrol ederek kapının açık kalmasını sağlar. Tabi bu programda kendi kendisini çağırarak sürekliliği sağlar.")
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ
 5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ
 5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.13. SONDAJ MAKİNESİ PROJESİ
 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ
 5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.1. OTOBAN GEÇİŞ SİSTEMİ
 5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.28. UÇAKSAVAR PROJESİ
 5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.40. SPREY DOLDURMA OTOMASYONU
 5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU
 5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.33. OTOMATİK PARÇA DELME OTOMASYONU
 5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI
 5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ
 5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU. Engin AVCI enginavci@firat.edu.tr
 5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin AVCI enginavci@firat.edu.tr Abdulkadir ŞENGÜR ksengur@firat.edu.tr Özet Bu benzetim projesinde demir hurda
Varol, A.: Otomatik Pres Makinası, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 74, Ağustos 98, S: 98-101
 5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU
 TEZGAHI OTOMASYONU") 5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.36. FINDIK SAVURMA OTOMASYONU
 5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU
 5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ
 5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU
 5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
VAROL, A.: Koli İstifleme Otomasyonu, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 107, Mayıs 2001, S: 114-119
 5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU
 5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL avarol@firat.edu.tr Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.41. UYDU ANTENİ YÖNLENDİRME OTOMASYON PROJESİ
 5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU
 5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.48. KALİTE KONTROL OTOMASYONU
 5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avci enginavci@firat.edu.tr Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU
 5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.17. ARICILIK BENZETİM PROJESİ
 5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU
 5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU
 5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde çok sayıda birimlerden
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU
 5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.32. OTOMATİK NARENCİYE SIKACAĞI PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ
 5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL avrol@firat.edu.tr ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU
 5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ
 5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol avarol@firat.edu.tr Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI
 5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.9. OTOMATİK MEYVE SOYMA VE DİLİMLEME MAKİNASI
 5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol avarol@firat.edu.tr Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.51. SERAMİK PAKETLEME OTOMASYONU
 5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.15. VİNÇ BENZETİM PROJESİ
 5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU
 5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.46. EBAT KONTROL OTOMASYONU
 5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ
 5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS
 4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU. Abdulkadir ġengür
 5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir ġengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde elektronik cihazlarda
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU
 5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU
 5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
MONTAJ KLAVUZU
 Türkiye nin İLK ve TEK Çift Motorlu Dişlisiz Otomatik Kapı Sistemi MONTAJ KLAVUZU www.schmelz.com.tr ĐÇĐNDEKĐLER 1. TEKNĐK ÖZELLĐKLER... Sayfa 03 2. MONTAJ TALĐMATLARI... Sayfa 04 2.1 MEKANĐZMA VE AKSESUARLARI...
Türkiye nin İLK ve TEK Çift Motorlu Dişlisiz Otomatik Kapı Sistemi MONTAJ KLAVUZU www.schmelz.com.tr ĐÇĐNDEKĐLER 1. TEKNĐK ÖZELLĐKLER... Sayfa 03 2. MONTAJ TALĐMATLARI... Sayfa 04 2.1 MEKANĐZMA VE AKSESUARLARI...
01 SERİSİ OTOMATİK KAYAR KAPILAR ÇOK YÖNLÜ KAPI ÇÖZÜMLERİ
 01 SERİSİ OTOMATİK KAYAR KAPILAR ÇOK YÖNLÜ KAPI ÇÖZÜMLERİ EL / AL ÇOK YÜKSEK VE AĞIR KAPILAR İÇİN ZİNCİRLİ MEKANİZMA Standart boyutların üzerindeki kapılarınız için mükemmel bir çözüm. Yeni nesil zincirli
01 SERİSİ OTOMATİK KAYAR KAPILAR ÇOK YÖNLÜ KAPI ÇÖZÜMLERİ EL / AL ÇOK YÜKSEK VE AĞIR KAPILAR İÇİN ZİNCİRLİ MEKANİZMA Standart boyutların üzerindeki kapılarınız için mükemmel bir çözüm. Yeni nesil zincirli
Automatic Entrance & Acccess System CS1000. Otomatik Kayar Kapı
 TM Automatic Entrance & Acccess System CS1000 Otomatik Kayar Kapı TM Automatic Entrance & Acccess System MODEL Kapasite Manuel Açma Gücü (Enerji olmadığı durumlarda) Operasyon Sıklığı Aktarma Kasnak -
TM Automatic Entrance & Acccess System CS1000 Otomatik Kayar Kapı TM Automatic Entrance & Acccess System MODEL Kapasite Manuel Açma Gücü (Enerji olmadığı durumlarda) Operasyon Sıklığı Aktarma Kasnak -
SIGNO BARİYER BAĞLANTI ŞEMASI
 SIGNO BARİYER BAĞLANTI ŞEMASI Mekanik Montaj 1) Bariyerle gelen malzemeleri resim 1 de görüldüğü gibi kontrol edin. 2) Bariyerin kolunun sağa mı yoksa sola mı çalışacağını belirleyip yay yönünü kolun
SIGNO BARİYER BAĞLANTI ŞEMASI Mekanik Montaj 1) Bariyerle gelen malzemeleri resim 1 de görüldüğü gibi kontrol edin. 2) Bariyerin kolunun sağa mı yoksa sola mı çalışacağını belirleyip yay yönünü kolun
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar
 7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
NİCE TURKİYE. ROBUS 600-1000 Hızlı Kullanma Kılavuzu ELEKTRİKSEL BAĞLANTI
 ELEKTRİKSEL BAĞLANTI ROBUS 600-1000 Hızlı Kullanma Kılavuzu Bağlantı yapılmayan hiçbir yere köprüleme yapmanıza gerek yok. Bağlantilarınızda Nice marka ürünleri kullanmanızda fayda vardır. SMX2 Bağlantısı
ELEKTRİKSEL BAĞLANTI ROBUS 600-1000 Hızlı Kullanma Kılavuzu Bağlantı yapılmayan hiçbir yere köprüleme yapmanıza gerek yok. Bağlantilarınızda Nice marka ürünleri kullanmanızda fayda vardır. SMX2 Bağlantısı
5.43. CAM TUĞLA BOYAMA OTOMASYONU
 5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU
 5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Giriş Ülkemizde
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU
 5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.3. ROBOTLAR VE ISI KONTROLÜ
 5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol avarol@firat.edu.tr Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ :
 SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa 2 Nolu Proje
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
Sanayi kapıları için otomasyon sistemleri
 Sanayi kapıları için otomasyon sistemleri Sanayi kapıları için otomasyonlar DITEC in geniş bir yelpazede yer alan ürünleri ve tahrik grupları, mevcut ve yeni giriş veya erişim sistemlerinin gerekli sanayi
Sanayi kapıları için otomasyon sistemleri Sanayi kapıları için otomasyonlar DITEC in geniş bir yelpazede yer alan ürünleri ve tahrik grupları, mevcut ve yeni giriş veya erişim sistemlerinin gerekli sanayi
WINGO2024-3524 Hızlı Kullanma Kılavuzu
 WINGO2024-3524 Hızlı Kullanma Kılavuzu Mekanik Montaj 1) Motorları kapıların açılma yönüne göre Motor1 i sol kanada, Motor2 yi sağ kanata takınız. Başka türlü bağlantılarda kapıların programlamasında sıkıntı
WINGO2024-3524 Hızlı Kullanma Kılavuzu Mekanik Montaj 1) Motorları kapıların açılma yönüne göre Motor1 i sol kanada, Motor2 yi sağ kanata takınız. Başka türlü bağlantılarda kapıların programlamasında sıkıntı
ERA 02... GAZ YAKICILAR İÇİN KONTROL RÖLESİ
 ERA 02... GAZ YAKICILAR İÇİN KONTROL RÖLESİ 02... Serisi Gaz yakma ve kontrol röleleri; pilot ateşlemeli yada iki kademeli gaz bekleri için 24 saat içersinde en az bir defa otomatik yapan, veya elle durdurulan
ERA 02... GAZ YAKICILAR İÇİN KONTROL RÖLESİ 02... Serisi Gaz yakma ve kontrol röleleri; pilot ateşlemeli yada iki kademeli gaz bekleri için 24 saat içersinde en az bir defa otomatik yapan, veya elle durdurulan
SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0
 SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0 EKİM, 2010 KONTAL ELEKTRONİK :: SEESAW BARİYER KONTROL KARTI KULLANIM KİTABI V2.0 0 SEESAW 24V DC BARİYER KONTROL KARTI KARTI VE KULLANIMI Seesaw
SEESAW 24V DC BARİYER KONTROL KARTI KULLANIM KİTABI V 2.0 EKİM, 2010 KONTAL ELEKTRONİK :: SEESAW BARİYER KONTROL KARTI KULLANIM KİTABI V2.0 0 SEESAW 24V DC BARİYER KONTROL KARTI KARTI VE KULLANIMI Seesaw
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür ksengur@firat.edu.tr
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5-14 KURULUM AYARLARI CALIŞMA FONKSİYONLARI MEKANÝK KURULUM ARIZA DURUMLARI GÜVENLÝK UYARILARI TEKNÝK ÖZELLÝKLER
 3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.com ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (2) 79-83 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
www.teknolojikarastirmalar.com ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (2) 79-83 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
OTOMATİK KAPI KONTROL CİHAZI
 OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
SPIN21KCE Hızlı Kullanma Kılavuzu
 SPIN21KCE Hızlı Kullanma Kılavuzu MEKANİK MONTAJ Montaj yapılacak yerin ölçüleri maksimum olarak; Maksimum Yükseklik Genişlik Seksiyonel kapılar 2,4 m 4,4 m 1 ***Montaj yapılacak yerin konsol bağlantısı
SPIN21KCE Hızlı Kullanma Kılavuzu MEKANİK MONTAJ Montaj yapılacak yerin ölçüleri maksimum olarak; Maksimum Yükseklik Genişlik Seksiyonel kapılar 2,4 m 4,4 m 1 ***Montaj yapılacak yerin konsol bağlantısı
MONTAJ KLAVUZU
 Türkiye nin İLK ve TEK Çift Motorlu Dişlisiz Otomatik Kapı Sistemi MONTAJ KLAVUZU www.schmelz.com.tr ĐÇĐNDEKĐLER 1. TEKNĐK ÖZELLĐKLER... Sayfa 03 2. MONTAJ TALĐMATLARI... Sayfa 04 2.1 MEKANĐZMA VE AKSESUARLARI...
Türkiye nin İLK ve TEK Çift Motorlu Dişlisiz Otomatik Kapı Sistemi MONTAJ KLAVUZU www.schmelz.com.tr ĐÇĐNDEKĐLER 1. TEKNĐK ÖZELLĐKLER... Sayfa 03 2. MONTAJ TALĐMATLARI... Sayfa 04 2.1 MEKANĐZMA VE AKSESUARLARI...
Nice RUN1800 RUN2500. Montaj Kılavuzu
 Nice RUN1800 RUN500 Montaj Kılavuzu TR 1 387mm 108mm 400mm 53mm 1 3 5 E 3 8 11 6 7 10 D C F 4 C 1 9 F B A 3 4 5 Max. 40mm 40 0 10 0 50 400 6 7 40 0 10 0 50 400 8 9 1 mm 10 11 1 13 3 8 mm 14 1 3 4 3 15
Nice RUN1800 RUN500 Montaj Kılavuzu TR 1 387mm 108mm 400mm 53mm 1 3 5 E 3 8 11 6 7 10 D C F 4 C 1 9 F B A 3 4 5 Max. 40mm 40 0 10 0 50 400 6 7 40 0 10 0 50 400 8 9 1 mm 10 11 1 13 3 8 mm 14 1 3 4 3 15
90 derece açılır bahçe kapıları için zemin altı otomasyonları
 90 derece açılır bahçe kapıları için zemin altı otomasyonları Giriş yapısını ve görünüşünü bozmayan çözüm Prestij kapıları için idealdir., 90 derece açılır bahçe kapılarında kullanılan zemin altı otomasyon
90 derece açılır bahçe kapıları için zemin altı otomasyonları Giriş yapısını ve görünüşünü bozmayan çözüm Prestij kapıları için idealdir., 90 derece açılır bahçe kapılarında kullanılan zemin altı otomasyon
Automatic Entrance & Acccess System GARAJ. Endüstiyel - Seksiyonel Garaj Kapıları. Seksiyonel Kapılar
 TM Automatic Entrance & Acccess System Endüstiyel - Seksiyonel Garaj Kapıları GARAJ Seksiyonel Kapılar TM Automatic Entrance & Acccess System TRONCO Endüstriyel Seksiyonel Kapılar TRONCO endüstriyel seksiyonel
TM Automatic Entrance & Acccess System Endüstiyel - Seksiyonel Garaj Kapıları GARAJ Seksiyonel Kapılar TM Automatic Entrance & Acccess System TRONCO Endüstriyel Seksiyonel Kapılar TRONCO endüstriyel seksiyonel
GAZ BRÜLÖRLERİ İÇİN KONTROL ÜNİTESİ
 GAZ BRÜLÖRLERİ İÇİN KONTROL ÜNİTESİ ( Kesintili çalışma ) 02C.1 Uygulama : 02C1 Kontrol ünitesi, tek veya çift kademeli proses brülörlerinde alev denetimi için tasarlanmıştır. 24 saat içinde en az bir
GAZ BRÜLÖRLERİ İÇİN KONTROL ÜNİTESİ ( Kesintili çalışma ) 02C.1 Uygulama : 02C1 Kontrol ünitesi, tek veya çift kademeli proses brülörlerinde alev denetimi için tasarlanmıştır. 24 saat içinde en az bir
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU. Abdulkadir Şengür ksengur@firat.edu.tr
 5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde, insan gücüne ihtiyaç
FOTOSELLİ KAPI SİSTEMLERİ İLE KONFORU YAŞAYIN... YÜKSEK GİRİŞ ÇIKIŞ POTANSİYELİNE SAHİP HIZLI AÇLIP KAPANAN OTOMATİK KAPI SİSTEMLERİ İLE RAHAT EDİN
 FOTOSELLİ KAPI SİSTEMLERİ İLE KONFORU YAŞAYIN... YÜKSEK GİRİŞ ÇIKIŞ POTANSİYELİNE SAHİP HIZLI AÇLIP KAPANAN OTOMATİK KAPI SİSTEMLERİ İLE RAHAT EDİN Fotoselli kapı sistemleri Harekete duyarlı sensörler
FOTOSELLİ KAPI SİSTEMLERİ İLE KONFORU YAŞAYIN... YÜKSEK GİRİŞ ÇIKIŞ POTANSİYELİNE SAHİP HIZLI AÇLIP KAPANAN OTOMATİK KAPI SİSTEMLERİ İLE RAHAT EDİN Fotoselli kapı sistemleri Harekete duyarlı sensörler
www.lentus.com.tr içindekiler 5-6 Teleskobik 90 Açılır Bahçe Kapısı Motoru (24V.) Bariyerler Tüp Motorlar Yana Kayar Bahçe Kapısı Motorları
 Bariyerler Tüp Motorlar Yana Kayar Bahçe Kapısı Motorları") Yana Kayar Bahçe Kapısı Motorları 1-2 800 Kg. Yana Kayar Bahçe Kapısı Motoru (220V.) Bariyerler 7-8 Bariyer 3 mt. 9-10 Bariyer 6 mt. Tüp Motorlar 19-20 Tüp Motorlar içindekiler 3-4 1500 Kg. Yana Kayar
Yana Kayar Bahçe Kapısı Motorları 1-2 800 Kg. Yana Kayar Bahçe Kapısı Motoru (220V.) Bariyerler 7-8 Bariyer 3 mt. 9-10 Bariyer 6 mt. Tüp Motorlar 19-20 Tüp Motorlar içindekiler 3-4 1500 Kg. Yana Kayar
GA 2.0 220V YANAKAYAR BAHÇE KAPISI MOTOR KONTROL KARTI
 GA 2.0 220V YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Kullanım Kitabı V 1.0 Aralık, 2011 KTAL ELEKTRİK :: 220V YANAKAYAR BAHÇE KAPISI MOTROL KTROL KARTI 0 YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Yanakayar
GA 2.0 220V YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Kullanım Kitabı V 1.0 Aralık, 2011 KTAL ELEKTRİK :: 220V YANAKAYAR BAHÇE KAPISI MOTROL KTROL KARTI 0 YANAKAYAR BAHÇE KAPISI MOTOR KTROL KARTI Yanakayar
MUTO Comfort Manuel Kayar Kapı Sistemi
 MUTO Comfort Manuel Kayar Kapı Sistemi MUTO KOMPAKT, ESNEK VE ÇOK YÖNLÜ Gelişmiş uygulama kolaylığı ve hayatı kolaylaştırma fonksiyonları ile tasarlanmış yeni MUTO Manuel Kayar Kapı Sistemi Ekstra fonksiyonlar:
MUTO Comfort Manuel Kayar Kapı Sistemi MUTO KOMPAKT, ESNEK VE ÇOK YÖNLÜ Gelişmiş uygulama kolaylığı ve hayatı kolaylaştırma fonksiyonları ile tasarlanmış yeni MUTO Manuel Kayar Kapı Sistemi Ekstra fonksiyonlar:
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI
 5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
2004 yılında şirket olarak faaliyetine devam eden firmamız,kurucularının daha önceki yıllarda yapı sektöründe edinmiş olduğu bilgi ve tecrübeyle
 2004 yılında şirket olarak faaliyetine devam eden firmamız,kurucularının daha önceki yıllarda yapı sektöründe edinmiş olduğu bilgi ve tecrübeyle alüminyum doğrama,cephe giydirme ve kapı otomasyon sistemleri
2004 yılında şirket olarak faaliyetine devam eden firmamız,kurucularının daha önceki yıllarda yapı sektöründe edinmiş olduğu bilgi ve tecrübeyle alüminyum doğrama,cephe giydirme ve kapı otomasyon sistemleri
MAK-LAB017 HİDROLİK SERVO MEKANİZMALAR DENEYİ 1. DENEYİN AMACI 2. HİDROLİK SİSTEMLERDE KULLANILAN ENERJİ TÜRÜ
 MAK-LAB017 HİDROLİK SERVO MEKANİZMALAR DENEYİ 1. DENEYİN AMACI Bu deneyin amacı temel ilkelerden hareket ederek, hidrolik sistemlerde kullanılan elemanların çalışma ilkeleri ve hidrolik devre kavramlarının
MAK-LAB017 HİDROLİK SERVO MEKANİZMALAR DENEYİ 1. DENEYİN AMACI Bu deneyin amacı temel ilkelerden hareket ederek, hidrolik sistemlerde kullanılan elemanların çalışma ilkeleri ve hidrolik devre kavramlarının
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU
 5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
KONVEYÖR EĞİTİM SETİ. Eğitim Araçları ONE PIECE CONVEYOR TRAINING SET. www.modulteknik.com
 KÖNVEYÖR (YÜRÜYEN BANT) Yaklaşık 200x1070 mm ölçülerinde Sağlam ve dayanıklı bant yapısı Ek yerlerinde kalınlık önleyici bağlantı sistemi ALÜMİNYUM BAĞLANTI PANOSU Yaklaşık 1060x780 mm boyutlarında alüminyum
KÖNVEYÖR (YÜRÜYEN BANT) Yaklaşık 200x1070 mm ölçülerinde Sağlam ve dayanıklı bant yapısı Ek yerlerinde kalınlık önleyici bağlantı sistemi ALÜMİNYUM BAĞLANTI PANOSU Yaklaşık 1060x780 mm boyutlarında alüminyum
MANAS OTOMASYON KATOLOG ROAD BLOCKER
 MANAS OTOMASYON KATOLOG ROAD BLOCKER Yüksek güvenlik gerektiren yerlerde kulanılır. Her türlü darbeye dayınıklılıdır İstenilen Ölçülerde Özel üretim yapılır Bakım gerektirmeyen hidrolik ünite Opsiyonel
MANAS OTOMASYON KATOLOG ROAD BLOCKER Yüksek güvenlik gerektiren yerlerde kulanılır. Her türlü darbeye dayınıklılıdır İstenilen Ölçülerde Özel üretim yapılır Bakım gerektirmeyen hidrolik ünite Opsiyonel
Open S OTOMATİK KAPI KULLANMA KILAVUZU. Rev
 Open S OTOMATİK KAPI KULLANMA KILAVUZU Rev.01.30.03.15 2.1. Teknik Özellikleri Çalışma Gerilimi Motor Gerilimi Çektiği Akım Motor Gücü 230 V AC 24 V DC 2A - max.6a 100 W Çalışma Sıcaklığı 0 0-15 / +50
Open S OTOMATİK KAPI KULLANMA KILAVUZU Rev.01.30.03.15 2.1. Teknik Özellikleri Çalışma Gerilimi Motor Gerilimi Çektiği Akım Motor Gücü 230 V AC 24 V DC 2A - max.6a 100 W Çalışma Sıcaklığı 0 0-15 / +50
Seksiyonel ve monoblok kapılar için otomasyon sistemi
 Seksiyonel ve monoblok kapılar için otomasyon sistemi Komple güvenirlik için sağlam motor Çalışma güvenliği için ileri teknoloji Çevre ile uyumlu, modern ve zarif tasarım Çok yönlülük Globe otomasyon sistemi,
Seksiyonel ve monoblok kapılar için otomasyon sistemi Komple güvenirlik için sağlam motor Çalışma güvenliği için ileri teknoloji Çevre ile uyumlu, modern ve zarif tasarım Çok yönlülük Globe otomasyon sistemi,
Semboller : :Açma kapama alteri :Ate leme butonu :Yardımcı röle :Merkez kontak :Normalde açık kontak :Normalde kapalı kontak :UV.
 ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
RTX 6A-BX RF Uzaktan Kumanda
 RTX 6A-BX RF Uzaktan Kumanda delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 Yüksek performanslı 6 kanal RF kontrol alıcı verici seti. Çalışma frekansı UHF 434.9 MHz. Endüstriyel çalışmalara uyumlu.açık
RTX 6A-BX RF Uzaktan Kumanda delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 Yüksek performanslı 6 kanal RF kontrol alıcı verici seti. Çalışma frekansı UHF 434.9 MHz. Endüstriyel çalışmalara uyumlu.açık
Açık Çevrim Kontrol Açık Çevrim Kontrol
 Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
OTOMATİK KLİMA SİSTEMİ
 OTOMATİK KLİMA SİSTEMİ Kabin içerisinin serinletilmesi ve ısıtılması işlemi, klima kontrol ünitesi tarafından kontrol edilir.klima kontrol ünitesi; kendisi ile bağlantılı olan parçaların sürat ve hareketleri
OTOMATİK KLİMA SİSTEMİ Kabin içerisinin serinletilmesi ve ısıtılması işlemi, klima kontrol ünitesi tarafından kontrol edilir.klima kontrol ünitesi; kendisi ile bağlantılı olan parçaların sürat ve hareketleri
Teknik Özellikler. Teknik Çizim. Açısal Kanatlı Optik Turnike
 SB 100 Butterfly Açısal Kanatlı Optik Turnike Kasa : AISI 304 kalite paslanmaz çelik ve dekoratif paslanmaz seçenekleri yapılabilmektedir. (BKZ. Sayfa 15-16) Kanatlar : 10 mm temperli & rodajlı cam Üst
SB 100 Butterfly Açısal Kanatlı Optik Turnike Kasa : AISI 304 kalite paslanmaz çelik ve dekoratif paslanmaz seçenekleri yapılabilmektedir. (BKZ. Sayfa 15-16) Kanatlar : 10 mm temperli & rodajlı cam Üst
Security Geçiş Sistemleri. Kayar Kapılar. Hastane Kapıları. 90 Derece Kapılar. Döner Kapılar
 Döner Kapılar Kayar Kapılar Hastane Kapıları 90 Derece Kapılar Security Geçiş Sistemleri Geçiş trafiğinin, standart kapıların yetersiz kaldığı yoğun girişlerde METAXDOOR GRA30/GRAND otomatik döner kapılar
Döner Kapılar Kayar Kapılar Hastane Kapıları 90 Derece Kapılar Security Geçiş Sistemleri Geçiş trafiğinin, standart kapıların yetersiz kaldığı yoğun girişlerde METAXDOOR GRA30/GRAND otomatik döner kapılar
BQ300 RF Röle Kontrol Ünitesi. Kullanım Kılavuzu. Doküman Versiyon: 1.1 18.11.2015 BQTEK
 RF Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.1 18.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı Şeması...
RF Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.1 18.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı Şeması...
1_ Dingil Sayım Sistemi l
 1_ Dingil Sayım Sistemi l Manyetik algılama prensibine dayalı dingil sayımı ile hat üzerinde herhangi bir izolasyon ve kesme işlemi gerektirmeden algılama gerçekleştirilir. Böylelikle, raylar üzerinden
1_ Dingil Sayım Sistemi l Manyetik algılama prensibine dayalı dingil sayımı ile hat üzerinde herhangi bir izolasyon ve kesme işlemi gerektirmeden algılama gerçekleştirilir. Böylelikle, raylar üzerinden
Upper. Otomatik Bariyerler
 otomatik bariyerler: Yetki kontrolü için en iyi çözüm Özel alanlar, ticari veya sanayi kuruluşları, genellikle yetkisiz kişilerin araç park alanlarına girmelerini engellemek için yetki kontrolüne gerek
otomatik bariyerler: Yetki kontrolü için en iyi çözüm Özel alanlar, ticari veya sanayi kuruluşları, genellikle yetkisiz kişilerin araç park alanlarına girmelerini engellemek için yetki kontrolüne gerek
30 m. 30 m. Loop Dedektör Kablosu 1x1,5 mm² 20 m loop kabosunun döşendikten sonra kalan kısmı Senkronizasyon Kablosu 3x 0,5 mm² 20 m
 M-BAR ve L - BAR HIZLI KULLANIM KILAVUZU Mekanik Montaj Mekanik Montakı yaparken Kullanma kılavuzundaki son sayfalardaki resimlere bakarak kurulumu yapabilirsiniz. YAY AYARI Yay ayarı yapabilmek için aşağıdaki
M-BAR ve L - BAR HIZLI KULLANIM KILAVUZU Mekanik Montaj Mekanik Montakı yaparken Kullanma kılavuzundaki son sayfalardaki resimlere bakarak kurulumu yapabilirsiniz. YAY AYARI Yay ayarı yapabilmek için aşağıdaki
TEKNİK ÖZELLİKLER. Giriş Beslemesi. Giriş besleme voltajı. Motor Çıkışı. Motor gerilimi. Aşırı yük ve kısa devre korumalı.
 1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda