Mikroişlemciler Laboratuar Deney Föyü
|
|
|
- Asli Özgür
- 6 yıl önce
- İzleme sayısı:
Transkript

1 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Laboratuar Deney Föyü
2 İçindekiler DENEYLER... 3 BUTON UYGULAMASI... 3 BUZZER SEGMENT DISPLAY İLE SAYICI DIGIT COUNTER... 7 MATRİS LED DİSPLAY... 9 ANALOG DİGİTAL ÇEVRİM STEP MOTOR DC MOTOR DENEYLERDE KULLANILAN PROGRAMLARIN TANITILMASI MPLAB X IDE PROJE OLUŞTURMA PIC C COMPLIER PROJE OLUŞTURMA PIC16F87XA Komut Açıklamaları


3 DENEYLER: BUTON UYGULAMASI Problem: 16F877 mikrodenetleyicinin PORT A0 girişine bağlı olan butona bastığımızda PORTD ye bağlı olan ledlerin yanması istenmektedir. Bu işlemi gerçekleştiren programı yazınız. Deneyin Amacı : 16f877 de PORTA nın I/0 haline getirilmesi PORTA nın RA0 pinine bağlı bir butonun test edilmesi ve bu şarta bağlı olarak PORTD YE bağlı LED lerin yakılması Bit test komutlarından BTFSS f,b komutunun öğretilmesi Devre Şeması: Deney Seti Bağlantıları 3


4 BUZZER Problem: 16F877 mikrodenetleyicinin PORT B0 çıkışından kare dalga üreterek buzzer da kesik kesik ses üretilmesi istenmektedir. Bu işlemi gerçekleştiren programı yazınız. Buzzer içinde yaklaşık 1khz lik bir osilatör hazır olarak bulunmaktadır. Yapmamız gereken tek şey J23 soketine herhangi bir PORTB den lojik 1 göndermektir. Deneyin Amacı : Zaman gecikmesi altprogramlarını kullanmak Bu sayede kare dalga üretmek Devre Şeması: Deney Seti Bağlantıları 4


5 7 SEGMENT DISPLAY İLE SAYICI Problem: 16F877 mikrodenetleyicinin D0..D7 portları 7 parçalı gösterge sürücüsünün ABCDEFG VE DP uçlarına, B0..B3 portları Dijit Seçme uçlarına bağlanmıştır. Çevrim tablosundaki karakterleri sırasıyla gösteren programı assembler dili ile yazınız. Çevrim / Bakış tabloları ile bir kodu başka bir koda dönüştürmek için kullanılırlar. Örneğin PIC mikro denetleyiciyi portlarına bağlı 7 Segment display / gösterge üzerinde hexadecimal (onaltılık tabandaki) sayıları göstermek, sıcaklık dönüşümü(derece-fahrenayt gibi) yapma, sinus, kosinus alma gibi işlemlerde dönüşüm/çevrim tabloları kullanılar. 7 Segment display kodlaması için aşağıdaki tablo kullanılır. Çevrim tablosunda uygun kodu seçmek için program sayıcıyı (PCL Program Counter), seçilen kodu ana programa göndermek için de RETLW komutunu kullanırız. 5
 dir.")
6 Çevrim tablosundaki verilere sıralı olarak erişerek PCL ye yani o anki adrese istediğimiz sayıyı ekleyerek istediğimiz adrese / elemana ulaşırız. PCL nin o anki değerine ADDWF ile istediğimiz sayıyı ekleriz. Kullanım Şekli: ADDWF PCL, F İstediğimiz değeri geri döndürecek komut ise RETLW (RETLW h 3F gibi) dir. Deneyin Amacı: Gösterge sürme işlemini kavrayabilmek Devre Şeması: Açıklamalar: 7 parçalı gösterge ünitesi tarama yaparak tek bir sürücü entegresi ile 4 adet göstergeyi sürebilecek şekilde yapılmıştır. Ortak Katot tipinde olan göstergelerden aktif edilmek istenenin girişini 1 yapmak gereklidir. Devrenin Kurulması: DENEY SETİ üzerindeki tüm, PORT lara ait sabitleme anahtarlarını OFF konumuna getirin. SDS1 ve SDS2 anahtarlarını ON konumuna getirin. (PORTD ve PORTB) SDS2 anahtarlarından birini kapatırsanız tek display aktif olur. MPLABX programında yazdığınız kodları derleyiniz ve oluşan HEX uzantılı dosyayı Pic16F877A ya yükleyin. 6

7 0..9 DIGIT COUNTER Problem: 16F877 mikrodenetleyicinin D0..D7 portları 7 parçalı gösterge sürücüsünün ABCDEFG VE DP uçlarına, B0..B3 portları Dijit Seçme uçlarına bağlanmıştır. Saniyede 1 ileriye doğru sayan 0-9 ileri sayıcı programını yazınız. 1 saniyelik zaman geçikmesini TIMER kullanarak ayarlayınız. Açıklamalar: 16F877 nin D ve B portları ile kontrol edilen 7 Segment displaylerde 0-9 arası yaklaşık 1 sn aralıklar ile artan ileri sayıcı programını TMR0 registerını zamanlayıcı şeklinde kullanarak yazınız. TMR0 ile GEÇİKME OPTION Register TMR0 sayıcısının FF (255) den 00 a geçmesi TMR0 kesmesine sebep olur ve bu kesme sonucunda INTCON kesme kaydedicisinin 2. (T0IF) biti 1 değerini alır. Bu kesmeyi kullanabilmek için daha öncesinde INTCON kaydedicisinin TOIE bitinin 1 yapılarak kesmeye izin verilmesi gerektiği unutulmamalıdır. 7
8 INTCON Register TMR0 hem yazılabilir, hem okunabilir bir sayıcıdır. OPTION kaydedicisi ile belirlenebilen frekans bölme seçeneği vardır. Saymaya ana programda, alt programlarda ve kesme alt programlarında da devam eder. Bu bir avantajdır. En önemli özelliği ise, saydığı değer FFh sayısından 00h sayısına geçerken oluşan taşmada, INTCON kaydedicisinde T0IF bayrağı 1 değerini alır ve bu değer kullanılarak bir kesme alt programı çalıştırılabilir. Öncesinde TOIE biti «1 «yapılarak TMRO da taşma olması halinde kesmeye izin verilmesi sağlanmalıdır. Kesme gecikmesi (Overflow time) Devrenin Kurulması: Bu formülden TMR0 başlangıç değeri de çekilebilir. O zaman, TMR0 = 256 (Gecikme zamanı * fosc ) / (4 * Prescaler) DENEY SETİ üzerindeki tüm, PORT lara ait sabitleme anahtarlarını OFF konumuna getirin. SDS1 ve SDS2 anahtarlarını ON konumuna getirin. (PORTD ve PORTB) SDS2 anahtarlarından birini kapatırsanız tek display aktif olur. MPLABX programında yazdığınız kodları derleyiniz ve oluşan HEX uzantılı dosyayı Pic16F877A ya yükleyin. 8

9 MATRİS LED DİSPLAY Problem: 16F877A mikrodenetleyiciyinin B0..B6 portlarını nokta matris göstergenin satır tarama uçlarına, D0..D4 portlarını sütun tarama uçlarına bağlayarak ekranda A,B,C,D harfinin 1 saniye aralıklarla görülmesini sağlayan programı yazınız. (1 sn zaman geçikmesini timer0 kesmesi kullanarak ayarlayınız.) Deneyin Amacı: Tarama yöntemini kavrayarak matris ekranlarda TMR0 zaman geçikmesi kullanarak karakter yazmak. Devre Şeması: Açıklamalar: Yandaki şekilde 7x5 matris LED in iç bağlantısı gözükmektedir. Matris LED display ler satır ve sütun olmak üzere bilgi uçlarına sahiptir. Matris LED displayleri sürmek için tarama metodu kullanılır. Yani ilk başta ilk sütun aktif edilir daha sonra ilk sütunda bulunan istenen LED i yakmak için ilgili satır veya satırlar aktif edilir. Ardından ikinci sütun aktif edilir ve bu sütunda yanması istenen LED ler için gerekli satırlar aktif edilir. Bu işlemler tarama mantığına göre diğer sütunlar içinde devam ettirilir. Böylece matris LED de gösterilmek istenilen karakter şekil oluşturulmuş olur. 9


10 Sütun Tarama Sistemi: Bu sistemde bilgi satırdan verilir ve sütün teker teker taranarak displayde bilgi oluşturulur. 1.Sütun aktif diğer sütunlar pasif, satır bilgisi olarak b x GEÇİKME 2. Sütun aktif diğer sütunlar pasif, satır bilgisi olarak b x GEÇİKME 3. Sütun aktif diğer sütunlar pasif, satır bilgisi olarak b x GEÇİKME 4. Sütun aktif diğer sütunlar pasif, satır bilgisi olarak b x GEÇİKME 5. Sütun aktif diğer sütunlar pasif, satır bilgisi olarak b x GEÇİKME Matris display de oluşan görüntünün yeterli bir süre göze görünmesi için yukarıda verilen döngü, komple belirli bir sayıda örneğin 25 kez tekrar edilmelidir. Devrenin Kurulması : Yazdığınız programı yükledikten sonra Deney Setimiz üzerinde ki PORTB ve PORTD çıkışlarını matris led displaye şekildeki gibi bağlıyoruz. Sorular: 1. PORTB nin sıfırıncı pinine bağlı olan butona her beş basma işleminde matris led displaydeki değeri bir artıran programı yazınız.(sayma işlemi 0-5 arasıda yapılması yeterlidir. Programı RB0 kesmesi kullanarak yazınız) 2. Adınızı harf harf 1 sn aralıklarla matris ekrana yazan programı yazınız. 10
11 ANALOG DİGİTAL ÇEVRİM Problem-1: 16F877A nın A1 portuna bir potansiyometre bağlıyarak portun girişine gelen voltajı değiştirin. Gelen voltaj değerini analog ve digital olarak LCD ekranda görüntüleyiniz. Deneyin Amacı: ADC mantığının kavranarak LCD ekranda yazı yazılması Teorik Bilgiler : Analog bilgiyi dijital bilgiye dönüştürmek için PIC 16F877 entegresi kullanıldığında ek devrelere ihtiyaç duyulmamaktadır.pic16f877 de 8 tane 10 bitlik A/D çevirme kanalı bulunur. A / D kanalları için RA4 hariç diğer A ve E portları kullanılır. Analog-dijital çevirici (A / D) analog voltaj değerini digital değere dönüştürmektir. Analogdijital dönüştürücü analog voltajı ikili sayılara dönüştürür. Bu ikili sayılar farklı uzunlukta ( 2, 4, 8, 10-bit ) olabilir. Daha fazla uzulukta bit kullanarak, daha yüksek çözünürlükte analog digital dönüşüm yapılabilir. ADC nin digital bilgiye dönüştürüleceği en küçük gerilim değerine adım büyüklüğü denir. Adım büyüklüğü aşağıdaki formülle bulunur. Adım Büyüklüğü = V ref (+) V ref ( ) 2 n (n, ADC nin bit sayısını(çözünürlüğünü)belirtir.) V ref (+), V ref ( ) değerleri setup_adc_ports() komotuyla istenilen pinler için tanımlanarak belirleneceği gibi otomatik olarak V dd beslemesini V ref (+), V ss beslemesini V ref ( ) olarak ayarlıyabiliriz. örneğin: Analog pin girişine 0 ile 5 volt arası analog gerilim uygulanıldığında 2 ve 3 bit çözünürlükteki karşılıkları tablo ve grafiksel olarak aşağıda verilmiştir. Adım Büyüklüğü = V ref (+) V ref ( ) = 5 0 = n 2 2 Adım Büyüklüğü = V ref (+) V ref ( ) = 5 0 = n 2 3 Analog giriş 0 ile 1.25 arasında ise 00 Sayısal Bilgi Karşılığı 1.25 ile 2.5 arasında ise ile 3.75 arasında ise ile 5 arasında ise 11 Analog giriş Sayısal Bilgi Karşılığı 0 ile arasında ise ile 1.25 arasında ise ile arasında ise ile 2.5 arasında ise ile arasında ise 100 Devrenin Şeması: ile 3.75 arasında ise ile arasında ise ile 5 arasında ise


12 Problem-2: 16F877A nın A1 portuna LDR ışık sensörü bağlıyarak voltaj değerini analog ve digital olarak LCD ekranda görüntüleyiniz. Foto direnç, üzerine düşen ışık arttıkça direnç değeri lineer olmayan bir şekilde azalır. LDR nin aydınlıkta direnci minimum, karanlıkta maksimumdur. Yandaki şekil için; Karanlık- LDR high- voltaj high Aydınlık - LDR low voltaj low 12
13 EK-1(ADC CCS-C KOMUTLARI) CCS-C Derleyicisinde Pic mikro denetleyicilerinin ADC donanımlarını kullanabilmek için aşağıdaki fonksiyonlar hazır olarak gelmektedir. setup_adc() A/D birimlerinin ayarları yapılır. setup_adc(adc_off); // ADC modülü kapalı setup_adc(adc_clock_internal); // ADC için dahili clock kullanılacak setup_adc(adc_clock_div_2); setup_adc(adc_clock_div_8); setup_adc(adc_clock_div_32); // Clock 2'ye bölünerek kullanılacak // Clock 8'e bölünerek kullanılacak // Clock 32'ye bölünerek kullanılacak setup_adc_ports() V ref (+), V ref ( ) ve analog olarak kullanılacak kanalların seçimi yapılır. set_adc_channel() ADC modülüne sahip 16F877A mikro denetleyicisi 8 adet analog kanal bulunmaktadır. Analog kanal seçimi bu komutla yapılr. set_adc_chanel(1); // RA1 kanalından gelen sinyal A/D işlemi uygulanır. Kanal ayarlaması yapıldıktan sonra yanlış okuma yapmamak için kısa bir süre beklenmesi gerekmektedir. Bu yüzden bu fonksiyonun ardından ortalama 20us lik bir gecikme kullanmak gerekmektedir. read_adc() Bu fonksiyon belirtilen kanaldan alınan sinyalin digital karşılığını okur ve geri döner. deger=read_adc(); //digital karşılığını okur ve deger değişkenine aktarır. #device ADC 16F877A ADC çözünürlüğü 10 bittir. Bu komutla isteğe bağlı olarak çözünürlük değiştirilebilir. #device ADC=10 // 10 bitlik ADC kullanılıyor. 13

14 STEP MOTOR Problem: 16F877 mikrodenetleyicinin B4..B7 portları step motor sürücü devresine, C0, C1 portları birer butona bağlanmıştır. Butonlara her basışta step motoru sağa veya sola doğru 1 adım döndüren programı yazınız. Deneyin Amacı : Step motoru sürme tekniğini kavrayabilmek Devre Şeması: Açıklamalar: Devrenin amacı, motorun ortak kablolarına, motor çalışma gerilimini uyguladıktan sonra, motorun diğer uçlarını, belli bir sırada toprağa göndererek, bir adım hareketi elde etmektir. Transistorun Base ucuna, mikrokontrolörden +5V geldiğinde, transistor tetiklenir ve Collector- Emiter iletime geçer. Dolayısıyla transistorun Collector ucuna bağlı kablolar toprağa ulaşır. Devredeki diyotlar, motorun üretmiş olduğu ters EMK dan, transistorları korumak için kullanılmışlardır. Yani, motor adım attıktan sonra oluşacak ters EMK, bu diyotlar sayesinde absorbe edilir. Step Motor Sürme Teknikleri: Tam Adım Sürme: Motor sargılarının ikisinin sıra ile aynı anda uyarıldığı şekline denir. İki faz uyartımda rotorun geçici durum tepkisi tek-faz uyartıma göre daha hızlıdır. Ancak burada güç kaynağından çekilen güç, iki katına çıkmıştır. 14


15 Yarım Adım Sürme: Bu uyartım modunda tek faz ve iki faz art arda uygulanır. Burada rotor, her bir uyartım sinyali için yarım adımlık bir hareket yapmaktadır. Bu uyartım modu sayesinde örneğin fabrika çıkışı 2 derece olan bir motorun adım açısını 1 dereceye düşürmüş oluruz. Adım A B A B NOT= Step motor, belirli adımlarla devrini tamamlar.360 lik bir dönme için gerekli adım miktarı, statora sarılan sargıların faz sayısına ve rotorunun çıkıntılı kutup sayısına bağlıdır. 15


16 DC MOTOR Problem: 16F877 mikrodenetleyicinin C2 portundan bir PWM sinyali üreterek DC motorun hız kontrolünü sağlayınız. DC motor sürücü devresine, D0, D1 portları birer butona bağlanmıştır. D0 butonu motorun hızının artmasını, D1 butonu motor hızının azalmasını sağlamalıdır. Deneyin Amacı: PWM ile DC motor hız kontrolünün gerçekleştirilmesi Devre Şeması: Açıklamalar: Mikrodenetleyici programı ile üretilen PWM sinyali RC2/CCP1 ucundan alınarak transistorun base girişine uygulanır. Transistorun PWM sinyalinin Ton sürelerinde iletimde Toff sürelerinde ise yalıtımdadır. Transistorun iletimde olduğu sürelerde Motor içerisinden bir akım geçer. Motorun dönme hareketi sırasındaki hızı ve devir sayısı Vm gerilimi ve aktarma oranına bağlıdır. PWM tekniği ile motor güçü çok hızlı bir şekilde anahtarlanarak motorun hızı kontrol edilir. Devredeki diyot, motorun üretmiş olduğu ters EMK dan, transistoru korumak için kullanılmıştır. 16
17 PWM için Kullanılan PIC-C Komutları PIC16F877 Mikrodenetleyicide PIC-C dili kullanarak PWM sinyali üretmek için 3fonksiyonu kullanmak yeterlidir. SET_PWM1_DUTY() [SET_PWM2_DUTY()] PWM sinyalinin Ton süresini ayarlar. SETUP_TIMER_2() Timer2 yazmacını PWM sinyali için uygun değere ayarlar. Timer2 yazmacına sahip mikrodenetleyiciler için kullanılabilir. Kullanımı: setup_timer_2 (mod, periyot, son bölücü) Bu fonksiyonda mod, T2_DISABLED, T2_DIV_BY_1, T2_DIV_BY_4,T2_DIV_BY_16 ifadelerinden biridir. Mod osilatör saat darbesinin kaça bölüneceğini bildirir. Periyot: Fonksiyon periyot katsayısıdır. Saat darbesi değerinin sıfırlandığı zamanı belirleyen arasındaki int tamsayı tipinde bir değişkendir. Son bölücü: Bir kesme sinyalinden önce zamanlayıcının kaç defa sıfırlanacağını belirleyen 1-16 arasında bir sayıdır. Örneğin bu sayı 1 olursa zamanlayıcı 1 kere, 2 olursa 2kere resetlenir. SET_CCP1() [SET_CCP2()] CCP modülünün çalışma modunu ayarlar. Kullanımı: setup_ccp1 (mod)setup_ccp2 (mod) mod bir sabittir. Her mikrodenetleyicinin başlık dosyasında geçerli sabitler tanımlanmıştır. Mod değeri için kullanılan sabit ifadeler PWM modu için aşağıda verilmiştir. CCP_PWM : Darbe genişlik modülatörünü (PWM) aktif yapar. 17

18 DENEYLERDE KULLANILAN PROGRAMLARIN TANITILMASI: MPLAB X IDE MPLAB X IDE, Microchip denetleyiciler ve sayısal sinyal denetleyiciler (dspic) için uygulama geliştirmekte kullanılan bir yazılım programıdır. Proje oluşturma işlemi bitirildikten sonra, programların derlenmesi, çalıştırılması ve hata testlerinin yapılması MPLAB-X aracılığı ile gerçekleştirilebilir. Bunlardan.hex uzantılı dosya, mikro denetleyiciye yüklenecek dosyadır. Yani orijinal programın makine diline çevrilmiş halini içerir..lst uzantılı dosya ise dokümantasyon amaçlı olarak kullanılır. MPLAB X IDE birçok PIC mikro denetleyiciyi ve tüm dspic leri destekler. MPLAB-X internetten ücretsiz olarak indirebilirsiniz. 18


19 MPLAB X IDE PROJE OLUŞTURMA 19


20 Programcı / Debugger aracını kullanacaksak ise bu bölümde onu seçiyoruz.hiçbir araç kullanmayacaksak simulator modunda çalıştırıyoruz. 20


21 Yeşil Desteklenen, Sarı Tam Desteklenmeyen, Kırmızı Hiç Desteklenmeyen araçları göstermektedir. Bu adımda kullanmak istediğimiz derleyiciyi belirliyoruz. 21

22 Projeye boşluk kullanmadan bir isim belirlememiz gerekmektedir. Kaynak dosyamızı new sekmesinden, hangi programlama dilinde yazacağımıza göre seçiyoruz. 22


23 PIC C COMPLIER PROJE OLUŞTURMA 23
24 24
25 25


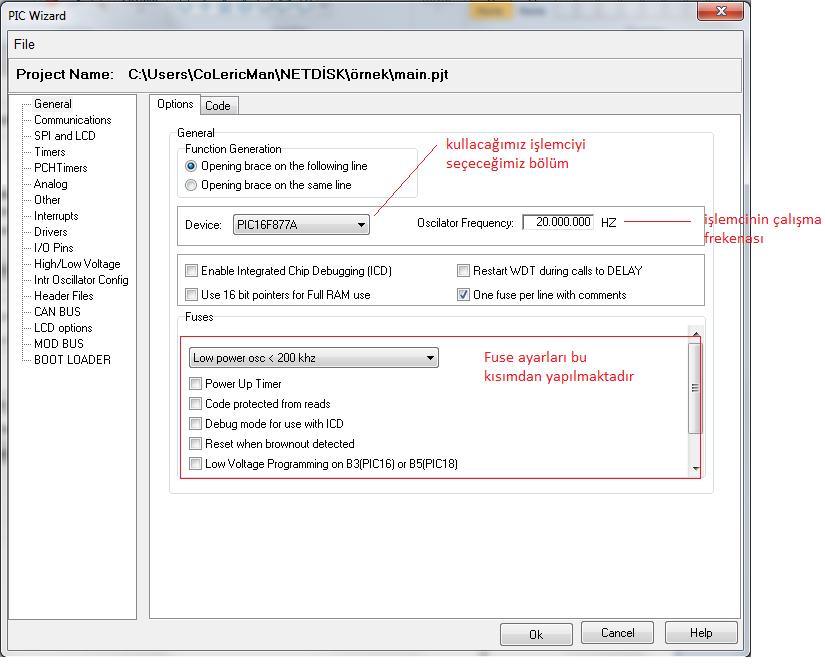
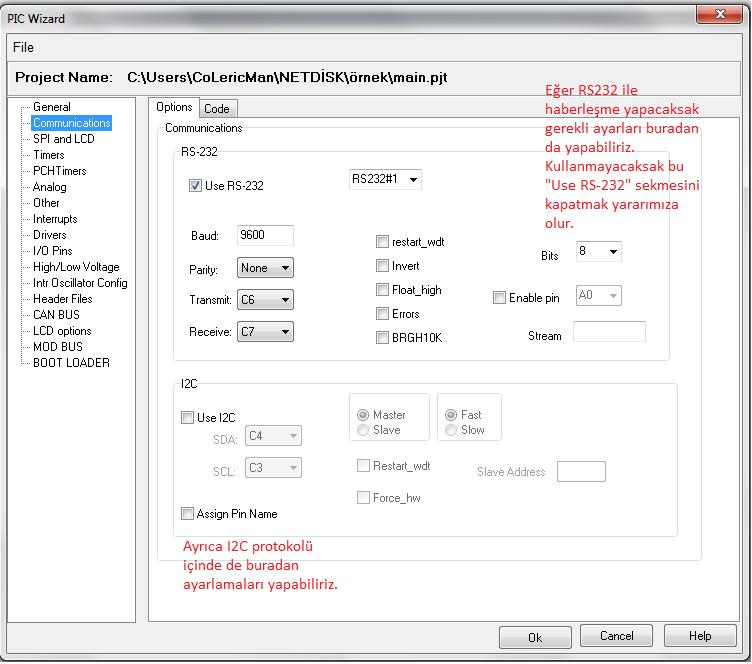
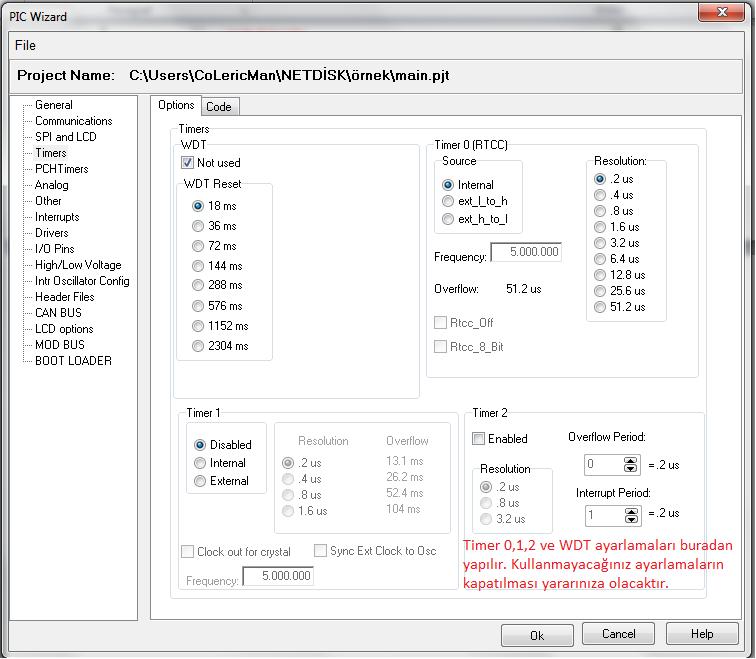
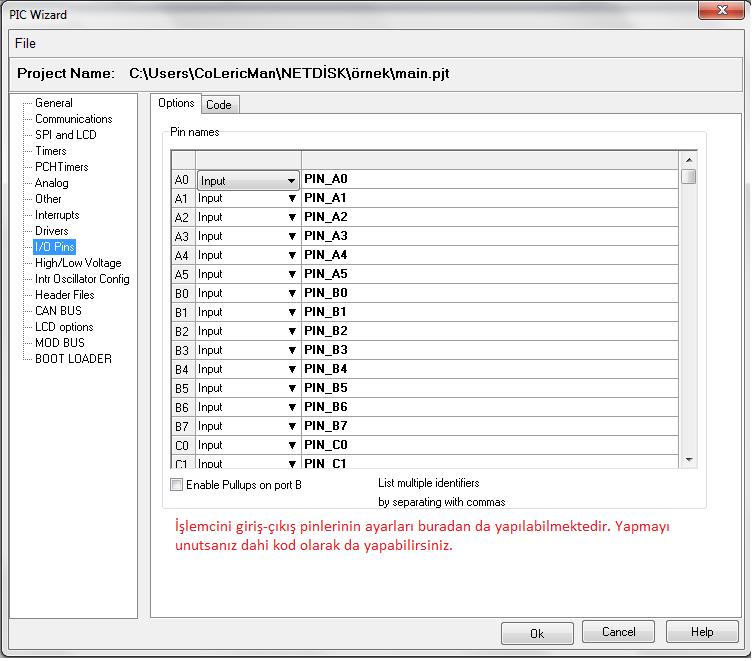
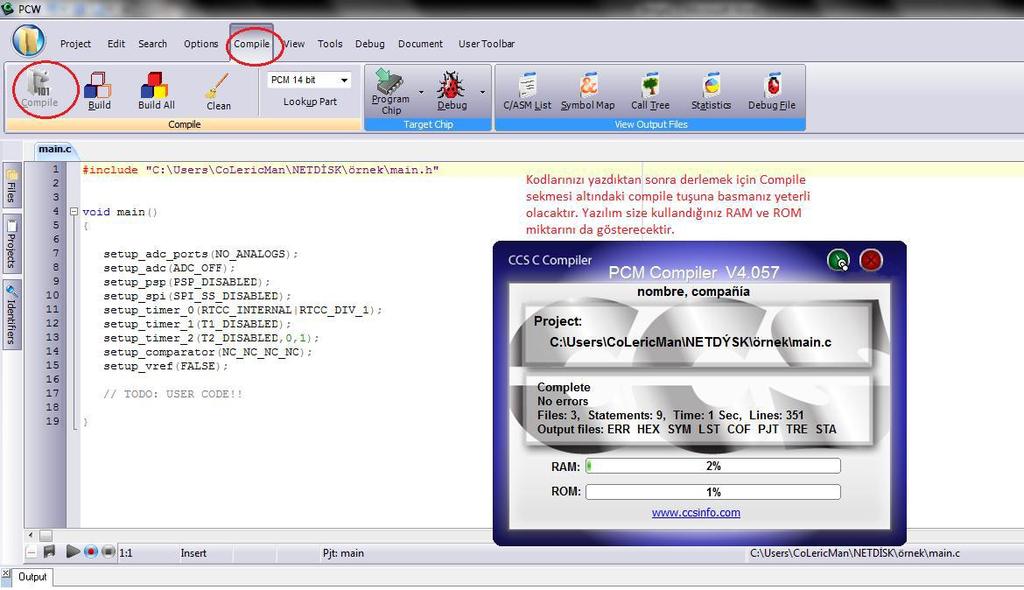
26 Gerekli ayarları yaptıktan sonra OK tuşuna basarak, işlemci için gerekli kodlarınızı yazmaya başlayabilirsiniz. 26

27 Yazılım bizim seçtiğimiz ayarları main.h dosyası içine kaydetmektedir. Kullandığımız veya kullanmadığımız her özellik bunu içinde yer almaktadır. Gördüğünüz gibi program sizin ayarlarınıza göre gerekli ayarları yapıp sizin kod yazmanız için hazır hale getirmiştir. TODO: USER CODE yazan yerden sonra kodlarınızı yazmaya başlayabilirsiniz. 27
28 28
29 PIC16F87XA Komut Açıklamaları TABLE 15-2: PIC16F87XA INSTRUCTION SET Mnemonic, 14-Bit Opcode Status Description Cycles Operands MSb LSb Affected Notes BYTE-ORIENTED FILE REGISTER OPERATIONS ADDWF f, d Add W and f dfff ffff C,DC,Z 1,2 ANDWF f, d AND W with f dfff ffff Z 1,2 CLRF f Clear f lfff ffff Z 2 CLRW - Clear W xxx xxxx Z COMF f, d Complement f dfff ffff Z 1,2 DECF f, d Decrement f dfff ffff Z 1,2 DECFSZ f, d Decrement f, Skip if 0 1(2) dfff ffff 1,2,3 INCF f, d Increment f dfff ffff Z 1,2 INCFSZ f, d Increment f, Skip if 0 1(2) dfff ffff 1,2,3 IORWF f, d Inclusive OR W with f dfff ffff Z 1,2 MOVF f, d Move f dfff ffff Z 1,2 MOVWF f Move W to f lfff ffff NOP - No Operation xx RLF f, d Rotate Left f through Carry dfff ffff C 1,2 RRF f, d Rotate Right f through Carry dfff ffff C 1,2 SUBWF f, d Subtract W from f dfff ffff C,DC,Z 1,2 SWAPF f, d Swap nibbles in f dfff ffff 1,2 XORWF f, d Exclusive OR W with f dfff ffff Z 1,2 BIT-ORIENTED FILE REGISTER OPERATIONS BCF f, b Bit Clear f bb bfff ffff 1,2 BSF f, b Bit Set f bb bfff ffff 1,2 BTFSC f, b Bit Test f, Skip if Clear 1 (2) 01 10bb bfff ffff 3 BTFSS f, b Bit Test f, Skip if Set 1 (2) 01 11bb bfff ffff 3 LITERAL AND CONTROL OPERATIONS ADDLW k Add Literal and W x kkkk kkkk C,DC,Z ANDLW k AND Literal with W kkkk kkkk Z CALL k Call Subroutine kkk kkkk kkkk CLRWDT - Clear Watchdog Timer TO,PD GOTO k Go to Address kkk kkkk kkkk IORLW k Inclusive OR Literal with W kkkk kkkk Z MOVLW k Move Literal to W xx kkkk kkkk RETFIE - Return from Interrupt RETLW k Return with Literal in W xx kkkk kkkk RETURN - Return from Subroutine SLEEP - Go into Standby mode TO,PD SUBLW k Subtract W from Literal x kkkk kkkk C,DC,Z XORLW k Exclusive OR Literal with W kkkk kkkk Z Note 1: When an I/O register is modified as a function of itself ( e.g., MOVF PORTB, 1), the value used will be that value present on the pins themselves. For example, if the data latch is 1 for a pin configured as input and is driven low by an external device, the data will be written back with a 0. 2: If this instruction is executed on the TMR0 register (and where applicable, d = 1), the prescaler will be cleared if assigned to the Timer0 module. 3: If Program Counter (PC) is modified, or a conditional test is true, the instruction requires two cycles. The second cycle is executed as a NOP. Note: Additional information on the mid-range instruction set is available in the PICmicro Mid-Range MCU Family Reference Manual (DS33023). DS39582B-page Microchip Technology Inc. 29
30 PIC16F87XA 15.2 Instruction Descriptions ADDLW Add Literal and W [ label ] ADDLW k Operands: 0 k 255 Status Affected: (W) + k (W) C, DC, Z The contents of the W register are added to the eight-bit literal k and the result is placed in the W register. BCF Bit Clear f [ label ] BCF f,b 0 b 7 Status Affected: 0 (f<b>) None Bit b in register f is cleared. ADDWF Add W and f [ label ] ADDWF f,d d Status Affected: C, DC, Z (W) + (f) (destination) Add the contents of the W register with register f. If d is 0, the result is stored in the W register. If d is 1, the result is stored back in register f. BSF Bit Set f [ label ] BSF f,b 0 b 7 Status Affected: 1 (f<b>) None Bit b in register f is set. ANDLW AND Literal with W [ label ] ANDLW k Operands: 0 k 255 Status Affected: (W).AND. (k) (W) Z The contents of W register are AND ed with the eight-bit literal k. The result is placed in the W register. BTFSS Bit Test f, Skip if Set [ label ] BTFSS f,b 0 b < 7 skip if (f<b>) = 1 Status Affected: None If bit b in register f is 0, the next instruction is executed. If bit b is 1, then the next instruction is discarded and a NOP is executed instead, making this a 2 TCY instruction. ANDWF AND W with f [ label ] ANDWF f,d d Status Affected: Z (W).AND. (f) (destination) AND the W register with register f. If d is 0, the result is stored in the W register. If d is 1, the result is stored back in register f. BTFSC Bit Test, Skip if Clear [ label ] BTFSC f,b 0 b 7 skip if (f<b>) = 0 Status Affected: None If bit b in register f is 1, the next instruction is executed. If bit b in register f is 0, the next instruction is discarded and a NOP is executed instead, making this a 2 TCY instruction. 30
31 PIC16F87XA CALL Call Subroutine CLRWDT Clear Watchdog Timer [ label ] CALL k Operands: 0 k 2047 Status Affected: None (PC)+ 1 TOS, k PC<10:0>, (PCLATH<4:3>) PC<12:11> Call Subroutine. First, return address (PC+1) is pushed onto the stack. The eleven-bit immediate address is loaded into PC bits <10:0>. The upper bits of the PC are loaded from PCLATH. CALL is a two-cycle instruction. Operands: Status Affected: [ label ] CLRWDT None 00h WDT 0 WDT prescaler, 1 TO 1 PD TO, PD CLRWDT instruction resets the Watchdog Timer. It also resets the prescaler of the WDT. Status bits, TO and PD, are set. CLRF Clear f COMF Complement f [ label ] CLRF f Status Affected: 00h (f) 1 Z Z The contents of register f are cleared and the Z bit is set. [ label ] COMF f,d d [0,1] Status Affected: Z (f) (destination) The contents of register f are complemented. If d is 0, the result is stored in W. If d is 1, the result is stored back in register f. CLRW Operands: Status Affected: Clear W [ label ] CLRW None 00h (W) 1 Z Z W register is cleared. Zero bit (Z) is set. DECF Decrement f [ label ] DECF f,d d [0,1] Status Affected: Z (f) - 1 (destination) Decrement register f. If d is 0, the result is stored in the W register. If d is 1, the result is stored back in register f.. 31
32 PIC16F87XA DECFSZ Decrement f, Skip if 0 [ label ] DECFSZ f,d d [0,1] Status Affected: None (f) - 1 (destination); skip if result = 0 The contents of register f are decremented. If d is 0, the result is placed in the W register. If d is 1, the result is placed back in register f. If the result is 1, the next instruction is executed. If the result is 0, then a NOP is executed instead, making it a 2 TCY instruction. INCFSZ Increment f, Skip if 0 [ label ] INCFSZ f,d d [0,1] Status Affected: None (f) + 1 (destination), skip if result = 0 The contents of register f are incremented. If d is 0, the result is placed in the W register. If d is 1, the result is placed back in register f. If the result is 1, the next instruction is executed. If the result is 0, a NOP is executed instead, making it a 2 TCY instruction. GOTO Unconditional Branch [ label ] GOTO k Operands: 0 k 2047 Status Affected: None k PC<10:0> PCLATH<4:3> PC<12:11> GOTO is an unconditional branch. The eleven-bit immediate value is loaded into PC bits <10:0>. The upper bits of PC are loaded from PCLATH<4:3>. GOTO is a two-cycle instruction. IORLW Inclusive OR Literal with W [ label ] IORLW k Operands: 0 k 255 Status Affected: (W).OR. k (W) Z The contents of the W register are OR ed with the eight-bit literal k. The result is placed in the W register. INCF Increment f [ label ] INCF f,d d [0,1] Status Affected: Z (f) + 1 (destination) The contents of register f are incremented. If d is 0, the result is placed in the W register. If d is 1, the result is placed back in register f. IORWF Inclusive OR W with f [ label ] IORWF f,d d [0,1] Status Affected: Z (W).OR. (f) (destination) Inclusive OR the W register with register f. If d is 0, the result is placed in the W register. If d is 1, the result is placed back in register f Microchip Technology Inc. DS39582B-page
33 PIC16F87XA RLF Rotate Left f through Carry [ label ] RLF f,d d [0,1] Status Affected: C See description below The contents of register f are rotated one bit to the left through the Carry flag. If d is 0, the result is placed in the W register. If d is 1, the result is stored back in register f. C Register f SLEEP Operands: Status Affected: [ label ] SLEEP None 00h WDT, 0 WDT prescaler, 1 TO, 0 PD TO, PD The power-down status bit, PD, is cleared. Time-out status bit, TO, is set. Watchdog Timer and its prescaler are cleared. The processor is put into Sleep mode with the oscillator stopped. RETURN Operands: Return from Subroutine [ label ] RETURN None Status Affected: None TOS PC Return from subroutine. The stack is POPed and the top of the stack (TOS) is loaded into the program counter. This is a two-cycle instruction. SUBLW Subtract W from Literal [ label ] SUBLW k Operands: 0 k 255 k - (W) W) Status Affected: C, DC, Z The W register is subtracted (2 s complement method) from the eight-bit literal k. The result is placed in the W register. RRF Rotate Right f through Carry [ label ] RRF f,d d [0,1] Status Affected: C See description below The contents of register f are rotated one bit to the right through the Carry flag. If d is 0, the result is placed in the W register. If d is 1, the result is placed back in register f. C Register f SUBWF Subtract W from f [ label ] SUBWF f,d d [0,1] Status Affected: (f) - (W) destination) C, DC, Z Subtract (2 s complement method) W register from register f. If d is 0, the result is stored in the W register. If d is 1, the result is stored back in register f. DS39582B-page Microchip Technology Inc. 33
34 PIC16F87XA SWAPF Swap Nibbles in f [ label ] SWAPF f,d d [0,1] Status Affected: None (f<3:0>) (destination<7:4>), (f<7:4>) (destination<3:0>) The upper and lower nibbles of register f are exchanged. If d is 0, the result is placed in the W register. If d is 1, the result is placed in register f. XORWF Exclusive OR W with f [ label ] XORWF f,d d [0,1] Status Affected: Z (W).XOR. (f) destination) Exclusive OR the contents of the W register with register f. If d is 0, the result is stored in the W register. If d is 1, the result is stored back in register f. XORLW Exclusive OR Literal with W [ label ] XORLW k Operands: 0 k 255 Status Affected: (W).XOR. k W) Z The contents of the W register are XOR ed with the eight-bit literal k. The result is placed in the W register. 34
W SAYAC SAYAC SAYAC. SAYAC=10110110 ise, d=0 W 01001001
 MOVLW k Move Literal to W k sabit değerini W saklayıcısına yükler. MOVLW h'1a' W 1A. Hexadecimal 1A sayısı W registerine yüklenir. MOVF f,d Move f f saklayıcısının içeriğini W veya f'e yükler. MOVF SAYAC,0
MOVLW k Move Literal to W k sabit değerini W saklayıcısına yükler. MOVLW h'1a' W 1A. Hexadecimal 1A sayısı W registerine yüklenir. MOVF f,d Move f f saklayıcısının içeriğini W veya f'e yükler. MOVF SAYAC,0
BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: 3.2.KOMUTLAR VE KULLANIM ÖRNEKLERİ
 BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: f : File register, Herhangi bir değişkenle tarif edilen bir saklayıcı adresi (0h-7Fh) k : Sabit değer (genellikle (0-FF arasında) d : Destination
BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: f : File register, Herhangi bir değişkenle tarif edilen bir saklayıcı adresi (0h-7Fh) k : Sabit değer (genellikle (0-FF arasında) d : Destination
YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ. EasyPic6 Deney Seti Kullanım Kılavuzu
 YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ EasyPic6 Deney Seti Kullanım Kılavuzu İstanbul 2009 İçindekiler EasyPic6 Deney Setinin Tanıtımı... 1 PIC16F887
YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ EasyPic6 Deney Seti Kullanım Kılavuzu İstanbul 2009 İçindekiler EasyPic6 Deney Setinin Tanıtımı... 1 PIC16F887
KOMUT AÇIKLAMALARI VE ÖRNEKLERİ
 KOMUT AÇIKLAMALARI VE ÖRNEKLERİ Komut açıklamalarında kullanılan harflerin anlamları: F : File(dosya), kaynak ve bilgi alınan yeri ifade eder. D : Destination (hedef), işlem sonucunun kaydedileceği yer.
KOMUT AÇIKLAMALARI VE ÖRNEKLERİ Komut açıklamalarında kullanılan harflerin anlamları: F : File(dosya), kaynak ve bilgi alınan yeri ifade eder. D : Destination (hedef), işlem sonucunun kaydedileceği yer.
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
PİC BASİC PROFESSİONAL
 PİC BASİC PROFESSİONAL Farklı Mikroişlemcilerin farklı Assembler kodları olması genellikle sorun olmuştur. Bu dezavantajdan kurtulmak için compiler lar geliştirilmiştir. C++ ve Basic dillerinde yazılanlar
PİC BASİC PROFESSİONAL Farklı Mikroişlemcilerin farklı Assembler kodları olması genellikle sorun olmuştur. Bu dezavantajdan kurtulmak için compiler lar geliştirilmiştir. C++ ve Basic dillerinde yazılanlar
Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre
 MİKRODENETLEYİCİLER Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre Mikrodenetleyici: Bir mikroişlemcinin
MİKRODENETLEYİCİLER Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre Mikrodenetleyici: Bir mikroişlemcinin
LCD (Liquid Crystal Display )
") LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil Bahar-Vize
 Prof. Dr. Hakan Ündil Bahar-Vize") MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil 2014-2015 Bahar-Vize BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil 2014-2015 Bahar-Vize BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - başla - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - başla - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic
Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk.
 HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
LCD (Liquid Crystal Display)
") LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI
 P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
16F84 ü tanıt, PORTB çıkış MOVLW h FF MOWF PORTB
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
Bank değiştirme Bir banktan diğerine geçmek için STATUS register denilen özel registerin 5. ve 6. bitinin durumunu değiştirmek gerekir.
 File register haritası Bank 0 Bank 1 0 00 INDF 0 80 INDF 0 01 TNF0 0 81 OPTION 0 02 PCL 0 82 PCL 0 03 STATUS 0 83 STATUS 0 04 FSR 0 84 FSR 0 05 PORT A 0 85 TRISA 0 06 PORT B 0 86 TRISB 0 07 0 87 EEPROM
File register haritası Bank 0 Bank 1 0 00 INDF 0 80 INDF 0 01 TNF0 0 81 OPTION 0 02 PCL 0 82 PCL 0 03 STATUS 0 83 STATUS 0 04 FSR 0 84 FSR 0 05 PORT A 0 85 TRISA 0 06 PORT B 0 86 TRISB 0 07 0 87 EEPROM
PIC16F877A nın Genel Özellikleri
 BÖLÜM 3 PIC16F877A nın Genel Özellikleri 3.1 Mikrodenetleyici Mimarisi 3.2 PIC16Fxxx Komut Seti 3.3 PIC16F877A Bellek Organizasyonu 3.4 Giriş/Çıkış Portları 3.5 STATUS ve TRIS Kaydedicileri 3.6 Kesme ve
BÖLÜM 3 PIC16F877A nın Genel Özellikleri 3.1 Mikrodenetleyici Mimarisi 3.2 PIC16Fxxx Komut Seti 3.3 PIC16F877A Bellek Organizasyonu 3.4 Giriş/Çıkış Portları 3.5 STATUS ve TRIS Kaydedicileri 3.6 Kesme ve
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
Yrd.Doç. Dr. Bülent ÇOBANOĞLU. Sakarya Üniversitesi, Teknoloji Fakültesi
 B Yrd.Doç. Dr. Bülent ÇOBANOĞLU Sakarya Üniversitesi, Teknoloji Fakültesi Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olması durumunda
B Yrd.Doç. Dr. Bülent ÇOBANOĞLU Sakarya Üniversitesi, Teknoloji Fakültesi Kesmeler Kesme (Interrupt), mikro denetleyicinin gerçekleştirdiği işleme bakmaksızın belirli durumların/olayların olması durumunda
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı
 1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
İstanbul Teknik Üniversitesi IEEE Öğrenci Kolu
 Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
Komutların İşlem Süresi
 Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final
 MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
Deney No Deney Adı Tarih. 3 Mikrodenetleyici Portlarının Giriş Olarak Kullanılması / /201...
 3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ PROGRAMLAMA 523EO0020 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ PROGRAMLAMA 523EO0020 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil Bahar
 Prof. Dr. Hakan Ündil Bahar") MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil 2016-2017 Bahar (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 6. BÖLÜM - ALT PROGRAMLAR Program içerisinde
MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil 2016-2017 Bahar (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 6. BÖLÜM - ALT PROGRAMLAR Program içerisinde
PIC TABANLI, 4 BASAMAKLI VE SER
 PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI
 MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI S1. Aşağıdaki eleman ya da birimlerden hangisi genel bir bilgisayar sisteminin donanımsal yapısında yer almaz? a) Mikroişlemci (CPU) b) Bellek
MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI S1. Aşağıdaki eleman ya da birimlerden hangisi genel bir bilgisayar sisteminin donanımsal yapısında yer almaz? a) Mikroişlemci (CPU) b) Bellek
MİKRODENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-Final Kısmı
 MİKRODENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2014-2015 Bahar-Final Kısmı (NOT: Derslerde işlenen diğer örnekler de Final sınavına dahildir) BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir
MİKRODENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2014-2015 Bahar-Final Kısmı (NOT: Derslerde işlenen diğer örnekler de Final sınavına dahildir) BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir
Mikroişlemciler 2013/2014 Bahar Y.Y. Laboratuvar Deney Kitabı
 YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler 2013/2014 Bahar Y.Y. Laboratuvar Deney Kitabı İstanbul 2013 İçindekiler Deneyle İlgili Genel Bilgiler
YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler 2013/2014 Bahar Y.Y. Laboratuvar Deney Kitabı İstanbul 2013 İçindekiler Deneyle İlgili Genel Bilgiler
EEM 419-Mikroişlemciler Güz 2017
 EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
DENEY-7. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-7 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ Doğada bulunan tüm sistemler analog düzendedir.
DENEY-7 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ Doğada bulunan tüm sistemler analog düzendedir.
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-FİNAL KISMI
 MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2017-2018 Bahar-FİNAL KISMI BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan bitlerin (C
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2017-2018 Bahar-FİNAL KISMI BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan bitlerin (C
BÖLÜM 1: MİKRODENETLEYİCİLER
 V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
PIC Mikrodenetleyiciler. Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1
 PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-FİNAL KISMI
 MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2016-2017 Bahar-FİNAL KISMI (NOT: Derslerde işlenen diğer örnekler, Lab. Deneyi ve Sayı Sistemleri de Final sınavına dahildir) BÖLÜM 7 - LOJİK
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2016-2017 Bahar-FİNAL KISMI (NOT: Derslerde işlenen diğer örnekler, Lab. Deneyi ve Sayı Sistemleri de Final sınavına dahildir) BÖLÜM 7 - LOJİK
Assembler program yazımında direkt olarak çizgi ile gösterilmemesine rağmen ekranınız ya da kağıdınız 4 ayrı sütunmuş gibi düşünülür.
 BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
KONFİGÜRASYON BİTLERİ
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 2) Doç. Dr. Hakan Ündil INCLUDE Dosyalar Assembly programlarını yazarken kullanılacak register adreslerini (EQU) komutu ile tanımlamak hem
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 2) Doç. Dr. Hakan Ündil INCLUDE Dosyalar Assembly programlarını yazarken kullanılacak register adreslerini (EQU) komutu ile tanımlamak hem
ÖĞRENME FAALİYETİ-1 1. MİKRODENETLEYİCİ PROGRAMI YAZMA
 ÖĞRENME FAALİYETİ-1 AMAÇ ÖĞRENME FAALİYETİ-1 Uygun ortam sağlandığında kurulacak devre için eksiksiz olarak yapabileceksiniz. mikrodenetleyici programını ARAŞTIRMA Mikrodenetleyici çeşitlerini aaştırınız.
ÖĞRENME FAALİYETİ-1 AMAÇ ÖĞRENME FAALİYETİ-1 Uygun ortam sağlandığında kurulacak devre için eksiksiz olarak yapabileceksiniz. mikrodenetleyici programını ARAŞTIRMA Mikrodenetleyici çeşitlerini aaştırınız.
Mikroişlemciler. Microchip PIC
 Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2
 T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
EasyPic 6 Deney Seti Tanıtımı
 EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
TIMER. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 TIMER SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı birimi bulunmaktadır. o Timer0 8 bitlik
TIMER SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı birimi bulunmaktadır. o Timer0 8 bitlik
DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI
 AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
 ve Z BAYRAĞI") MİKRO DENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan Ündil 2015-2016 Bahar-Vize (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
MİKRO DENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan Ündil 2015-2016 Bahar-Vize (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
IŞIĞA YÖNELEN PANEL. Muhammet Emre Irmak. Mustafa Kemal Üniversitesi Mühendislik Fakültesi. Elektrik-Elektronik Mühendisliği Bölümü
 IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ PROGRAMLAMA ANKARA 2006 Milli Eğitim Bakanlığı tarafından
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ PROGRAMLAMA ANKARA 2006 Milli Eğitim Bakanlığı tarafından
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA UYGULAMA_05_01 UYGULAMA_05_01. Doç.Dr. SERDAR KÜÇÜK
 UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
BSF STATUS,5 ;bank1 e geçiş CLRF TRISB ;TRISB=00000000 BCF STATUS,5 ;bank0 a geçiş
 +5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
+5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
ONDOKUZ MAYIS ÜNİVERSİTESİ
 ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ MİKROİŞLEMCİLER LABORATUVARI PİC UYGULAMA NOTLARI BÖLÜM 1. 1.1 16F84 Mickrodenetleyicisi: PIC16F84 18 pinli bir mikrodenetleyicidir.
ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ MİKROİŞLEMCİLER LABORATUVARI PİC UYGULAMA NOTLARI BÖLÜM 1. 1.1 16F84 Mickrodenetleyicisi: PIC16F84 18 pinli bir mikrodenetleyicidir.
MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ
 MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Mikroişlemciler ve Assembly Dili Ders Saati (T+U+L) Kredi AKTS 4
MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Mikroişlemciler ve Assembly Dili Ders Saati (T+U+L) Kredi AKTS 4
DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME
 DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME Ders 13, Slayt 2 1 TMR0 SAYICISI Ram belleğin h 01 adresi TMR0 adlı özel amaçlı bir saklayıcı olarak düzenlenmiştir. Bu saklayıcı bir sayıcıdır.
DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME Ders 13, Slayt 2 1 TMR0 SAYICISI Ram belleğin h 01 adresi TMR0 adlı özel amaçlı bir saklayıcı olarak düzenlenmiştir. Bu saklayıcı bir sayıcıdır.
www.muhendisiz.net BÖLÜM 1
 www.muhendisiz.net BÖLÜM 1 IR HABERLEŞME 1.1.IR Haberleşme Sisteminin Gerçekleştirilmesi Tüm haberleşme sistemlerinde olduğu gibi IR haberleşme sistemlerinde de modülasyon tekniğinden yararlanılır. IR
www.muhendisiz.net BÖLÜM 1 IR HABERLEŞME 1.1.IR Haberleşme Sisteminin Gerçekleştirilmesi Tüm haberleşme sistemlerinde olduğu gibi IR haberleşme sistemlerinde de modülasyon tekniğinden yararlanılır. IR
BİLİŞİM TEKNOLOJİLERİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİ Ankara, 2014 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya
T.C. MİLLÎ EĞİTİM BAKANLIĞI BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİ Ankara, 2014 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya
PIC UYGULAMALARI. Öğr.Gör.Bülent Çobanoğlu
 PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ
 DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI
 PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC Mikrodenetleyicileri
 PIC Mikrodenetleyicileri Intel 1976 da 8031/51 ailesini piyasaya sürdüğünde dünyanın en popüler mikroişlemcisi olmuştu. Bu işlemci dünya üzerinde 12 den fazla firma tarafından (İntel, Phillips, Dallas,
PIC Mikrodenetleyicileri Intel 1976 da 8031/51 ailesini piyasaya sürdüğünde dünyanın en popüler mikroişlemcisi olmuştu. Bu işlemci dünya üzerinde 12 den fazla firma tarafından (İntel, Phillips, Dallas,
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI. öğrencilerine eğitimleri esnasında iş hayatında karşılaşabilecekleri kontrol işlemleri ve
 MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR?
 0 BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR? Programlamada döngü kadar etkili bir diğer kullanım şekli de alt programlardır. Bu sistemde işlemin birkaç yerinde lazım olan bir program parçasını tekrar
0 BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR? Programlamada döngü kadar etkili bir diğer kullanım şekli de alt programlardır. Bu sistemde işlemin birkaç yerinde lazım olan bir program parçasını tekrar
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu PIC Assembly Dersleri 2. Ders: Çalışma Mantığı ve Komutlar HUNRobotX - PIC Assembly Dersleri 2. Ders: Çalışma Mantığı ve Komutlar Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel
Hacettepe Robot Topluluğu PIC Assembly Dersleri 2. Ders: Çalışma Mantığı ve Komutlar HUNRobotX - PIC Assembly Dersleri 2. Ders: Çalışma Mantığı ve Komutlar Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel
T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİLER 1
 BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİLER 1") T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİLER 1 ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen modüller;
T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİLER 1 ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen modüller;
Hyper Terminal programı çalıştırıp Uygun COM portu ve iletişim parametrelerinin ayarları yapılıp bekletilmelidir.
 DENEY 1: PIC 16F84 DEN BİLGİSAYARA VERİ GÖNDERME Bu uygulamada verici kısım PIC16F84, alıcı kısım ise bilgisayardır. Asenkron iletişim kurallarına göre her iki tarafta aynı parametreler kullanılacaktır.
DENEY 1: PIC 16F84 DEN BİLGİSAYARA VERİ GÖNDERME Bu uygulamada verici kısım PIC16F84, alıcı kısım ise bilgisayardır. Asenkron iletişim kurallarına göre her iki tarafta aynı parametreler kullanılacaktır.
Mikroişlemciler. Giriş
 Mikroişlemciler Giriş Öğr. Gör. M. Ozan AKI r1.0 Mikroişlemcilerin Kısa Tarihçesi Hesaplama makinelerinin temelleri çok eskiye dayanır; İlk olarak Çin de kullanılmaya başlayan Abaküs, tamamen elle çalışan
Mikroişlemciler Giriş Öğr. Gör. M. Ozan AKI r1.0 Mikroişlemcilerin Kısa Tarihçesi Hesaplama makinelerinin temelleri çok eskiye dayanır; İlk olarak Çin de kullanılmaya başlayan Abaküs, tamamen elle çalışan
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI
 PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
Sistem Gereksinimleri: Uygulama Gelistirme: PIC Mikroislemcisinin Programlanmasi: PIC Programlama Örnekleri -1
 PIC Programlama Örnekleri -1 Sistem Gereksinimleri: PIC programlayicinin kullanilabilmesi için; Win98 ve üstü bir isletim sistemi Paralel port 60 MB veya daha üstü disk alani gerekmektedir. Ancak programlama
PIC Programlama Örnekleri -1 Sistem Gereksinimleri: PIC programlayicinin kullanilabilmesi için; Win98 ve üstü bir isletim sistemi Paralel port 60 MB veya daha üstü disk alani gerekmektedir. Ancak programlama
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
Microprocessors and Programming
 Microprocessors and Programming Dr. Kadir ERKAN Department of Mechatronics Engineering Fall : 2013 10/20/2013 1 Interpretation of Assembly Instructions ADDLW h 10 ; literal (constant) oriented ADDWF TOPLA,d
Microprocessors and Programming Dr. Kadir ERKAN Department of Mechatronics Engineering Fall : 2013 10/20/2013 1 Interpretation of Assembly Instructions ADDLW h 10 ; literal (constant) oriented ADDWF TOPLA,d
MPLAB IDE ve ISIS ile ASSEMBLY DİLİNDE UYGULAMA GELİŞTİRMEK
 MPLAB IDE ve ISIS ile ASSEMBLY DİLİNDE UYGULAMA GELİŞTİRMEK 1.1 Programın Başlatılması 1.2 Yeni Proje Oluşturma 1.3 MCU Seçimi Yrd.Doç.Dr.Bülent Çobanoğlu 1.4 MCU Programlama Dil Seçimi 1.5 Proje İsmi
MPLAB IDE ve ISIS ile ASSEMBLY DİLİNDE UYGULAMA GELİŞTİRMEK 1.1 Programın Başlatılması 1.2 Yeni Proje Oluşturma 1.3 MCU Seçimi Yrd.Doç.Dr.Bülent Çobanoğlu 1.4 MCU Programlama Dil Seçimi 1.5 Proje İsmi
HUNRobotX - Makaleler - Hız Ayarlı Çoklu DC Motor Kontrolü. Makaleler Hız Ayarlı Çoklu DC Motor Kontrolü
 Makaleler Hız Ayarlı Çoklu DC Motor Kontrolü Hız Ayarlı Çoklu DC Motor Kontrolü Yazan: Mustafa Tufaner, Düzenleyen: Canol Gökel - 18 Kasım 2006 Giriş Robotikte sıkça kullanılabilecek bir uygulama ile karşınızdayız.
Makaleler Hız Ayarlı Çoklu DC Motor Kontrolü Hız Ayarlı Çoklu DC Motor Kontrolü Yazan: Mustafa Tufaner, Düzenleyen: Canol Gökel - 18 Kasım 2006 Giriş Robotikte sıkça kullanılabilecek bir uygulama ile karşınızdayız.
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK. PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü
 DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI
 SİNYAL KONTROL UYGULAMASI") DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
DENEY-4. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-4 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ZAMANLAYICI VE SAYICILAR PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı
DENEY-4 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ZAMANLAYICI VE SAYICILAR PIC16F877A mikrodenetleyicisinde üç adet zamanlayıcı/sayıcı
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ
 T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: Program yazma, derleme, pic e yükleme,
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: Program yazma, derleme, pic e yükleme,
DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK
 KULLANIMI İÇERİK") DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK KESME NEDİR KESME ÇEŞİTLERİ INTCON SAKLAYICISI RBO/INT KESMESİ PORTB (RB4-RB7) LOJİK SEVİYE DEĞİŞİKLİK KESMESİ Ders 12, Slayt 2 1 KESME PIC in bazı
DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK KESME NEDİR KESME ÇEŞİTLERİ INTCON SAKLAYICISI RBO/INT KESMESİ PORTB (RB4-RB7) LOJİK SEVİYE DEĞİŞİKLİK KESMESİ Ders 12, Slayt 2 1 KESME PIC in bazı
8 Ledli Havada Kayan Yazı
 8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ
 T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: 8085 Simülatör Kullanımı Deney_2: 8085
T.C FIRAT ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHİSLİĞİ EET-302 MİKROİŞLEMCİLER LABORATUVARI DENEY FÖYÜ Doç. Dr. Melih Cevdet İNCE DENEYLER Deney_1: 8085 Simülatör Kullanımı Deney_2: 8085
PIC MİKRODENETLEYİCİ KULLANARAK BİR SİSTEMİN TELEFONLA UZAKTAN KONTROLÜ
 T.C. FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PIC MİKRODENETLEYİCİ KULLANARAK BİR SİSTEMİN TELEFONLA UZAKTAN KONTROLÜ BİTİRME ÖDEVİ HAZIRLAYANLAR Serkan İNAL ve
T.C. FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PIC MİKRODENETLEYİCİ KULLANARAK BİR SİSTEMİN TELEFONLA UZAKTAN KONTROLÜ BİTİRME ÖDEVİ HAZIRLAYANLAR Serkan İNAL ve
DOKUMANLAR
 DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 1
 T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 1 Ankara, 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 1 Ankara, 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
SAYISAL MANTIK LAB. PROJELERİ
 1. 8 bitlik Okunur Yazılır Bellek (RAM) Her biri ayrı adreslenmiş 8 adet D tipi flip-flop kullanılabilir. RAM'lerde okuma ve yazma işlemleri CS (Chip Select), RD (Read), WR (Write) kontrol sinyalleri ile
1. 8 bitlik Okunur Yazılır Bellek (RAM) Her biri ayrı adreslenmiş 8 adet D tipi flip-flop kullanılabilir. RAM'lerde okuma ve yazma işlemleri CS (Chip Select), RD (Read), WR (Write) kontrol sinyalleri ile
3.2 PIC16F84 Yazılımı PIC Assembly Assembler Nedir?
 3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
Mikroişlemciler. Giriş
 Mikroişlemciler Giriş Öğr. Gör. M. Ozan AKI r1.1 Mikroişlemcilerin Kısa Tarihçesi Hesaplama makinelerinin temelleri çok eskiye dayanır; İlk olarak Çin de kullanılmaya başlayan Abaküs, tamamen elle çalışan
Mikroişlemciler Giriş Öğr. Gör. M. Ozan AKI r1.1 Mikroişlemcilerin Kısa Tarihçesi Hesaplama makinelerinin temelleri çok eskiye dayanır; İlk olarak Çin de kullanılmaya başlayan Abaküs, tamamen elle çalışan
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu Makaleler Geri Sayım Cihazı HUNRobotX - Makaleler - Geri Sayım Cihazı Geri Sayım Cihazı Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel - 22 Ekim 2006 Giriş Hepinizin bazı macera
Hacettepe Robot Topluluğu Makaleler Geri Sayım Cihazı HUNRobotX - Makaleler - Geri Sayım Cihazı Geri Sayım Cihazı Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel - 22 Ekim 2006 Giriş Hepinizin bazı macera
PIC MCU ile UYGULAMALAR
 PIC MCU ile UYGULAMALAR Gecikme Programları TMRO Gecikmesi 7 Segment Göstergeler Sayaç Örnekleri Trafik Sinyalizasyonu ADC-DAC Uygulamaları Kesmeler ve Uygulamaları Tuş Takımı (Keypad) Uygulamaları Paralel
PIC MCU ile UYGULAMALAR Gecikme Programları TMRO Gecikmesi 7 Segment Göstergeler Sayaç Örnekleri Trafik Sinyalizasyonu ADC-DAC Uygulamaları Kesmeler ve Uygulamaları Tuş Takımı (Keypad) Uygulamaları Paralel
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE DİJİTAL İŞLEMLER 523EO0021 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE DİJİTAL İŞLEMLER 523EO0021 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
KESME (INTERRUPT) NEDİR?
 NEDİR?") KESME (INTERRUPT) NEDİR? Mikro işlemcilerle yeni çalışmaya başlayan çoğu kimseler, interrupt kelimesini duymalarına rağmen, kullanımlarının zor olduğu düşüncesiyle programları içerisinde kullanmaktan çekinirler.
KESME (INTERRUPT) NEDİR? Mikro işlemcilerle yeni çalışmaya başlayan çoğu kimseler, interrupt kelimesini duymalarına rağmen, kullanımlarının zor olduğu düşüncesiyle programları içerisinde kullanmaktan çekinirler.