AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL)
|
|
|
- Eser Gökdemir
- 8 yıl önce
- İzleme sayısı:
Transkript
1 AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL) Ayrık-zamanda çalışırken sinyaller bütün zamanlar için değil, sadece belli zaman anları için tanımlıdır. Bu zaman anları arasındaki aralığa Ts diyelim. Örneğin Ts = 0.5 ise sistemdeki bütün sinyaller (giriş, çıkış ve durumlar) sadece t = 0, 0.5, 1, 1.5, 2, 2.5, 3,... anlarında tanımlıdır, ara değerlerde (örneğin t = 0.34, 2.78 vs.) tanımlı değildir. Bu durum sayısal ortamların (bilgisayar, mikroişlemci vs.) tipik özelliğidir. Bu ortamlara veriler, analog/dijital çeviricilerden geçirilerek alınır ve bu çeviriciler sürekli olarak örnek alamazlar, belli bir frekansta örnek alarak sayısal ortama gönderirler. Bunun sonucunda sayısal ortamda sadece bu örneklerin alındığı anlardaki veriler tanımlı olur. Ayrıca bilgisayar veya işlemcideki program da sürekli olarak dış ortama veri gönderemez çünkü bu verileri işlemek için belirli bir zamana ihtiyacı vardır. Bu nedelerden dolayı bu tür sistemlerde giriş-cıkış işlemi sürekli olarak değil kesik kesik (ayrık-zamanda) olur. Bu tür durumlarda çalışabilecek kontrolörlerin ayrık-zamanda elde edilmesi gerekir. Kontorlcüler doğrudan ayrık zamanda tasarlanabileceği gibi, sürekli zamanda tasarlanmış bir kontrolcü sonradan da ayrık-zamana çevrilebilir. Contents DC motor modelinin ayrık zamana çevrilmesi c2d komutu ile sistemin ayrıklaştırılması Ayrık zaman sistemi üzerinde standart işlemler Ayrık-zamanlı sistemlerin Simulink ile incelenmesi ve kontrolcü tasarımı Ayrık zamanlı sistemlerde durum geribeslemesi LQR ile regülasyon örneği LQRI ile verilen bir hız referansını takip örneği LQI için elde edilen sonucu düzeltme çabası LQI için elde edilen sonucu düzeltme çabası 2 Farklı ayrıklaştırma metotlarının karşılaştırılması Sıfırıncı dereceden tutma (Zero-order hold - ZOH) Birinci dereceden tutma (First-order hold - FOH) Dürtü cevabı eşleme (Impulse Invariant Mapping) Çift doğrusal (Tustin) yaklaşıklaması (Bilinear/Tustin Approximation) Kutup-sıfır eşleme (Pole-zero matching) Bütün yöntemleri bir arada kıyaslama DC motor modelinin ayrık zamana çevrilmesi Yine standart örneğimiz olan DC motor modeli üzerinde çalışalım. Modelin çıkarılmasını önceki derslerimizde görmüştük. Burada giriş olarak motor voltajı, çıkış olarak da motor hızının alındığı iki boyutlu modeli ele alalım. Motor parametreleri aşağıdaki gibi olsun: R = 2.0; % Direnç (Ohm) L = 0.5; % Endüktans (H) Km = 0.1; % Armatür sabiti Kb = 0.1; % EMK sabiti Kf = 0.2; % Sürtünme sabiti (Nms)

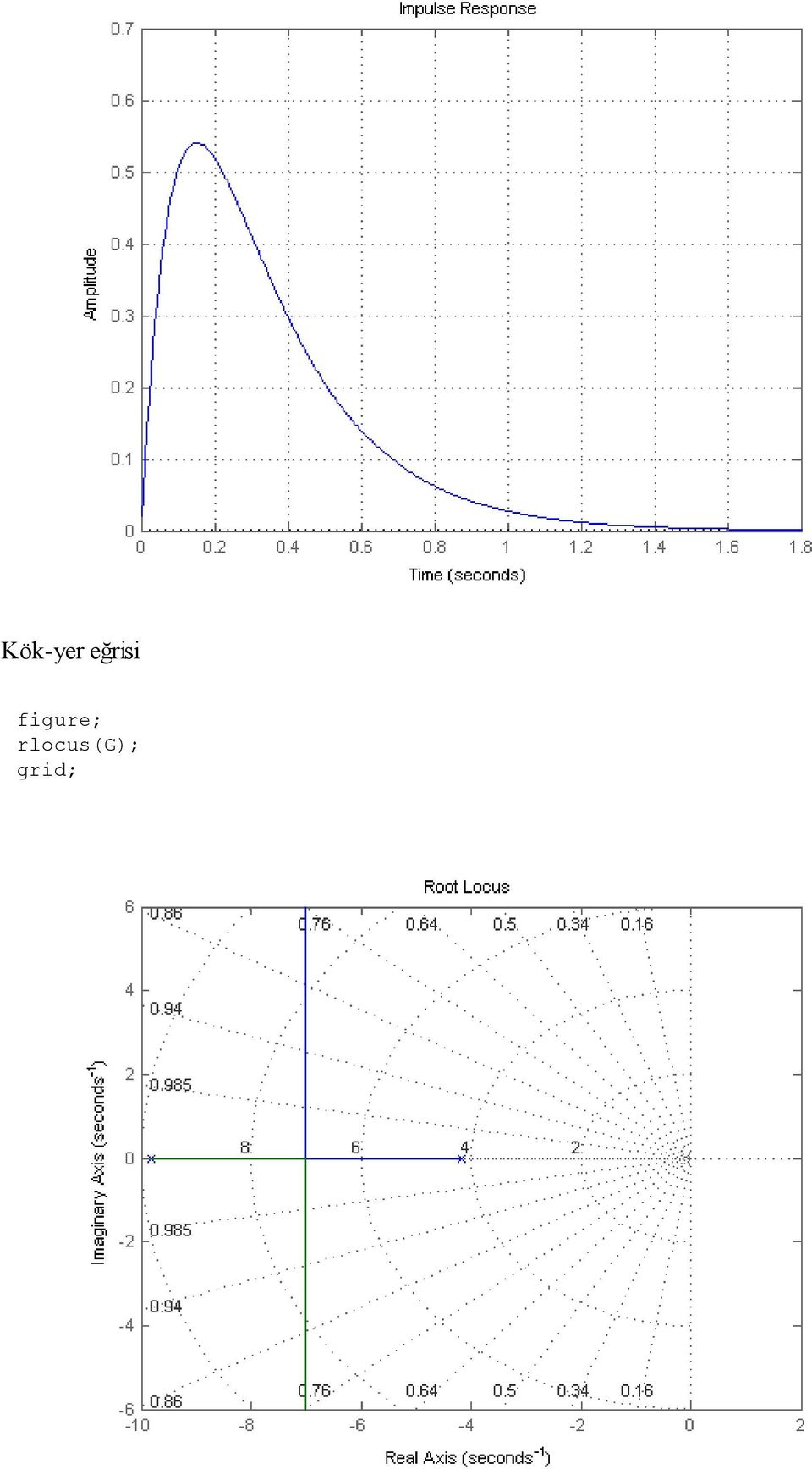
2 J = 0.02; % Yük eylemsizlik momenti (kg.m^2) Motor sistemini oluşturalım: Am = [-R/L -Kb/L; Km/J -Kf/J]; Bm = [1/L; 0]; Cm = [ 0 1 ]; Dm = 0; G = ss(am,bm,cm,dm); Sistemin bazı standart tepkilerini inceleyelim. Birim basamak cevabı: step(g); grid; Birim dürtü cevabı impulse(g); grid;
![[1/L; 0]; Cm = [ 0 1 ]; Dm = 0; G = ss(am,bm,cm,dm); Sistemin bazı](/docs-images/40/6503289/images/page_2.jpg "standart tepkilerini inceleyelim.")
3 Kök-yer eğrisi rlocus(g); grid;
4 Bode frekans cevabı P = bodeoptions; P.FreqUnits = 'Hz'; % Frekansı Hz olarak göster bode(g,p); grid; c2d komutu ile sistemin ayrıklaştırılması Sürekli zamanda tanımlanmış bir sistem c2d komutu ile istenilen bir Ts periyodu aralıkla örneklenerek ayrıklaştırılabilir: fs = 10; % Örnekleme frekanası Ts = 1/fs; % Örnekleme periyodu Gd = c2d(g,ts) % G sistemini, Ts örnekleme periyodu ile ayrıklaştır a = x1 x2 x x b = u1 x x c = x1 x2 y1 0 1
 % G sistemini, Ts örnekleme periyodu ile ayrıklaştır a")
5 d = u1 y1 0 Sampling time (seconds): 0.1 Discrete-time state-space model. Çıkan sistemin sonundaki bilgilere dikkat ediniz. Sistemin ayrık zamanlı olduğu (Discrete-time) ve örnekleme periyodunun 0.1 olduğu yazmaktadır. Ayrık zaman sistemi üzerinde standart işlemler Sürekli zaman sistemleri üzerinde kullanmış olduğumuz komutların pek çoğunu aynı şekilde ayrık zamanlı sistemler üzerinde de kullanabiliriz. MATLAB sistemin sürekli mi ayrık mı olduğunu otomatik olarak anlayacak ve gerekirse ona göre sonuç verecektir. Bazı örnekler vermek gerekirse: Durum uzayı sisteminin A, B, C, D matrisleri alalım: [Amd,Bmd,Cmd,Dmd] = ssdata(gd) Amd = Bmd = Cmd = 0 1 Dmd = 0 Alternatif olarak nokta notasyonuyla da tek tek bu matrislere ulaşabiliriz: Gd.A ans = Gd.B

6 ans = Gd.C ans = 0 1 Gd.D ans = 0 Ayrıklaştırılmış sistemin transfer fonksiyonuna bakalım: tf(gd) Transfer function: z z^ z Sampling time (seconds): 0.1 Ayrık zamanda transfer fonksiyonlarının z dönüşümü olarak ifade edildiğine dikkat ediniz. (Sürekli zamanda Laplace (s) dönüşümü olarak ifade ediliyordu). Burada z değişkeni zaman kaydırma operatörü olarak da düşünülebilir. Transfer fonksiyonunun payı ve paydasını alalım: [numd,dend] = tfdata(gd,'v') % 'v' argümanını sonuçları vektör olarak almak % için verdik; aksi takdirde hücre olarak verir. numd = dend =
 % 'v' argümanını sonuçları vektör olarak almak % için verdik; aksi takdirde hücre olarak")
7 Sıfır-kutup-kazanç formatında ayrık zaman sistemine bakalım: zpk(gd) Zero/pole/gain: (z ) (z ) (z ) Sampling time (seconds): 0.1 Ayrık zamanlı sistemin birim dürtü cevabı: impulse(gd); grid; Ayrık zamanlı sistemin birim basamak cevabı: step(gd); grid;
; grid; Ayrık")
8 Ayrı zamanlı sistemin bir sinüs girişine verdiği cevap: T = 2; % Periyot t = 0:Ts:3*T; % ÖNEMLİ: Ayrık-zamanda çalışırken zaman aralığı hep Ts olmalı! u = 2*sin(2*pi*1/T*t); % Sinüs sinyalini oluştur lsim(gd,u,t); % Cevabı hesaplat ve çizdir
; % Sinüs sinyalini oluştur")
9 Ayrık zamanlı sistemin Bode eğrisi. Dikey siyah çizgi temsil edilen en yüksek frekansı ( veya radyan olarak ) gösterir: bode(gd);

10 Ayrık zamanlı sistemin kök-yer eğrisi. Ayrık zamanda kararlılık bölgesinin birim çemberin içi olduğunu hatırlayınız. Ayrıca sabit-sönüm ve sabit-doğal-frekans eğrilerinin de sürekli zamandan farklı olduğuna dikkat ediniz. rlocus(gd); grid; sisotool ile ayrık zamanda kontrolcü tasarımı sisotool(gd);

 % Cd değişkeni yoksa (sisotool'dan tasarlanmadıysa) oluştur z = tf('z',ts); % z-değişkenini tanımla Cd = 0.")
11 Eğer sisotool ile uğraşmak istemiyorsanız doğrudan aşağıdaki gibi bir kontrolcünün transfer fonksiyonunu da girebilirsiniz. if ~exist('cd','var') % Cd değişkeni yoksa (sisotool'dan tasarlanmadıysa) oluştur z = tf('z',ts); % z-değişkenini tanımla Cd = *(z+1)/(z-1); end Geribesleme ile kapalı çevrim sistemini oluştur: Gcld = feedback(cd*gd,1) a = x1 x2 x3 x x x

12 b = u1 x1 0 x x c = x1 x2 x3 y d = u1 y1 0 Sampling time (seconds): 0.1 Discrete-time state-space model. Kapalı çevrim sisteminin birim basamak cevabı step(gcld); grid; Ayrık-zamanlı sistemlerin Simulink ile incelenmesi ve kontrolcü tasarımı motormodelayrik01
; grid;")
13 Ayrık zamanlı sistemlerde durum geribeslemesi Sürekli zaman için kullanılan fonksiyonların aynıları ayrık zamanlı sistemler için de kullanılabilir. MATLAB sistemin ayrık zamanlı olduğunu otomatik olarak anlayacak ve tasarımı ona göre yapacaktır. LQR ile regülasyon örneği % Geribesleme kazancını hesapla Q = 1*eye(2); R = 1; K = lqr(gd,q,r); % Kapalı çevrim sistemi Gcd = ss(amd-bmd*k,zeros(size(bmd)),cmd-dmd*k,zeros(size(dmd)),ts); % Durumları birden başlatarak ilk koşul (sıfır-giriş) cevabı [y,t,x] = initial(gcd,[1;3],3); % Sonuçları çizdir subplot(2,1,1); stairs(t,x,'linewidth',2); grid; xlabel('t (s)'); ylabel('x(t)'); legend('i(t)','\omega(t)'); subplot(2,1,2); stairs(t,-k*x','linewidth',2); xlabel('t (s)'); ylabel('u(t)'); grid;
),cmd-dmd*k,zeros(size(dmd)),ts); % Durumları birden başlatarak ilk koşul (sıfır-giriş) cevabı [y,t,x] = initial(gcd,[1;3],3); % Sonuçları çizdir")
14 LQRI ile verilen bir hız referansını takip örneği % Geribesleme kazancını elde et (integral için ekstradan bir durum % geldiğini unutmayın) Q = 10*eye(3); R = 1; K = lqi(gd,q,r); K1 = K(1:2); % Kazancın sistem durumu (x) için olan kısmı K2 = K(3); % Kazancın integralci durumu (xi) için olan kısmı % Integralci çıkışının girileceği sistemi oluştur G1 = ss(amd-bmd*k1,-k2*bmd,cmd-dmd*k1,dmd,ts); % İntegralciyi oluştur z = tf('z',ts); % z değişkeni Gi = Ts/(z-1); Gcd = feedback(gi*g1,1); % Kapalı çevrim sistemi [y,t,x] = step(gcd); % Birim basamak cevabı % Sonuçları çizdir subplot(2,1,1); stairs(t,y); xlabel('t (s)'); ylabel('y(t)'); subplot(2,1,2); stairs(t,x); xlabel('t (s)'); ylabel('x(t)');
; % Birim basamak cevabı % Sonuçları çizdir subplot(2,1,1); stairs(t,y); xlabel('t (s)'); ylabel('y(t)'); subplot(2,1,2); stairs(t,x); xlabel('t (s)');")
15 LQI için elde edilen sonucu düzeltme çabası Sistem cevabı istediğimizden yavaş çıktı. Takip ile ilgili parametreyi (Q) arttırıp tekrar deneyelim. Q = 100*eye(3); R = 1; K = lqi(gd,q,r); K1 = K(1:2); % Kazancın sistem durumu (x) için olan kısmı K2 = K(3); % Kazancın integralci durumu (xi) için olan kısmı % Integralci çıkışının girileceği sistemi oluştur G1 = ss(amd-bmd*k1,-k2*bmd,cmd-dmd*k1,dmd,ts); % İntegralciyi oluştur z = tf('z',ts); % z değişkeni Gi = Ts/(z-1); Gcd = feedback(gi*g1,1); % Kapalı çevrim sistemi [y,t,x] = step(gcd); % Birim basamak cevabı % Sonuçları çizdir subplot(2,1,1); stairs(t,y); xlabel('t (s)'); ylabel('y(t)'); grid; subplot(2,1,2); stairs(t,x); xlabel('t (s)'); ylabel('x(t)');
; % Birim basamak cevabı % Sonuçları çizdir subplot(2,1,1); stairs(t,y); xlabel('t (s)'); ylabel('y(t)'); grid; subplot(2,1,2);")
16 grid; LQI için elde edilen sonucu düzeltme çabası 2 Yukarıdaki çabamız sistem cevabı çok fazla hızlandırmadı. Böyle hallerde durumların ağırlıklarını tek tek incelemek faydalı olabilir. LQI ile oluşturduğumuz sistemde bir integral alıcı olduğunu hatırlayın. Integral alma işlemi genellikle sistemi yavaşlatan bir işlemdir. O nedenle Q matrisinide integralci durumu xi ile ilgili parametreyi arttırarak integralcinin yakınsama hızını artırmaya çalışarak tasarım yapmayı deneyelim. QX = 10*eye(2); % Sistem durumu için Q parametresi QI = 100; % Integralcinin durumu için Q parametresi Q = blkdiag(qx,qi); % Tümleşik Q parametresi R = 1; % R parametresi K = lqi(gd,q,r); % Durum geribeslemesi kazancını oluştur K1 = K(1:2); % Kazancın sistem durumu (x) için olan kısmı K2 = K(3); % Kazancın integralci durumu (xi) için olan kısmı % Integralci çıkışının girileceği sistemi oluştur G1 = ss(amd-bmd*k1,-k2*bmd,cmd-dmd*k1,dmd,ts); % İntegralciyi oluştur z = tf('z',ts); % z değişkeni Gi = Ts/(z-1); Gcd = feedback(gi*g1,1); % Kapalı çevrim sistemi [y,t,x] = step(gcd); % Birim basamak cevabı
; % Sistem durumu için Q parametresi QI = 100; % Integralcinin durumu için Q parametresi Q = blkdiag(qx,qi); % Tümleşik Q parametresi R = 1; % R parametresi K = lqi(gd,q,r); % Durum")
17 % Sonuçları çizdir subplot(2,1,1); stairs(t,y); xlabel('t (s)'); ylabel('y(t)'); grid; subplot(2,1,2); stairs(t,x); xlabel('t (s)'); ylabel('x(t)'); grid; Şekillerden görüleceği üzere bu defa daha hızlı ve kabul edilebilir bir cevap elde ettik. Farklı ayrıklaştırma metotlarının karşılaştırılması Bir sürekli zaman sistemini ayrık zamana çevirmek için farklı yaklaşımlar kullanılabilir. Normalde c2d komutunu kullandığımızda ekstra bir argüman vermezsek standart yöntem olan sıfırıncı dereceden tutma (zero order hold - ZOH) yaklaşımını kullanır. Bu yöntem genelde yeterli olur ama bazı özel durumlarda diğer tekniklere de bakmak ve onların içinden birini seçmek tercih edilebilir. Örnek olarak motor sistemimizi MATLAB'da tanımlı farklı ayrıklaştırma yöntemleri ile ayrıklaştıralım ve elde edilen sistemlerin cevaplarını kıyaslayalım. Sıfırıncı dereceden tutma (Zero-order hold - ZOH) Ayrık sistemi hesapla: Gdz = c2d(g,ts,'zoh')

18 a = x1 x2 x x b = u1 x x c = x1 x2 y1 0 1 d = u1 y1 0 Sampling time (seconds): 0.1 Discrete-time state-space model. Birim basamak, dürtü ve Bode cevabını çizdir: step(g,gdz); impulse(g,gdz); bode(g,gdz);

19
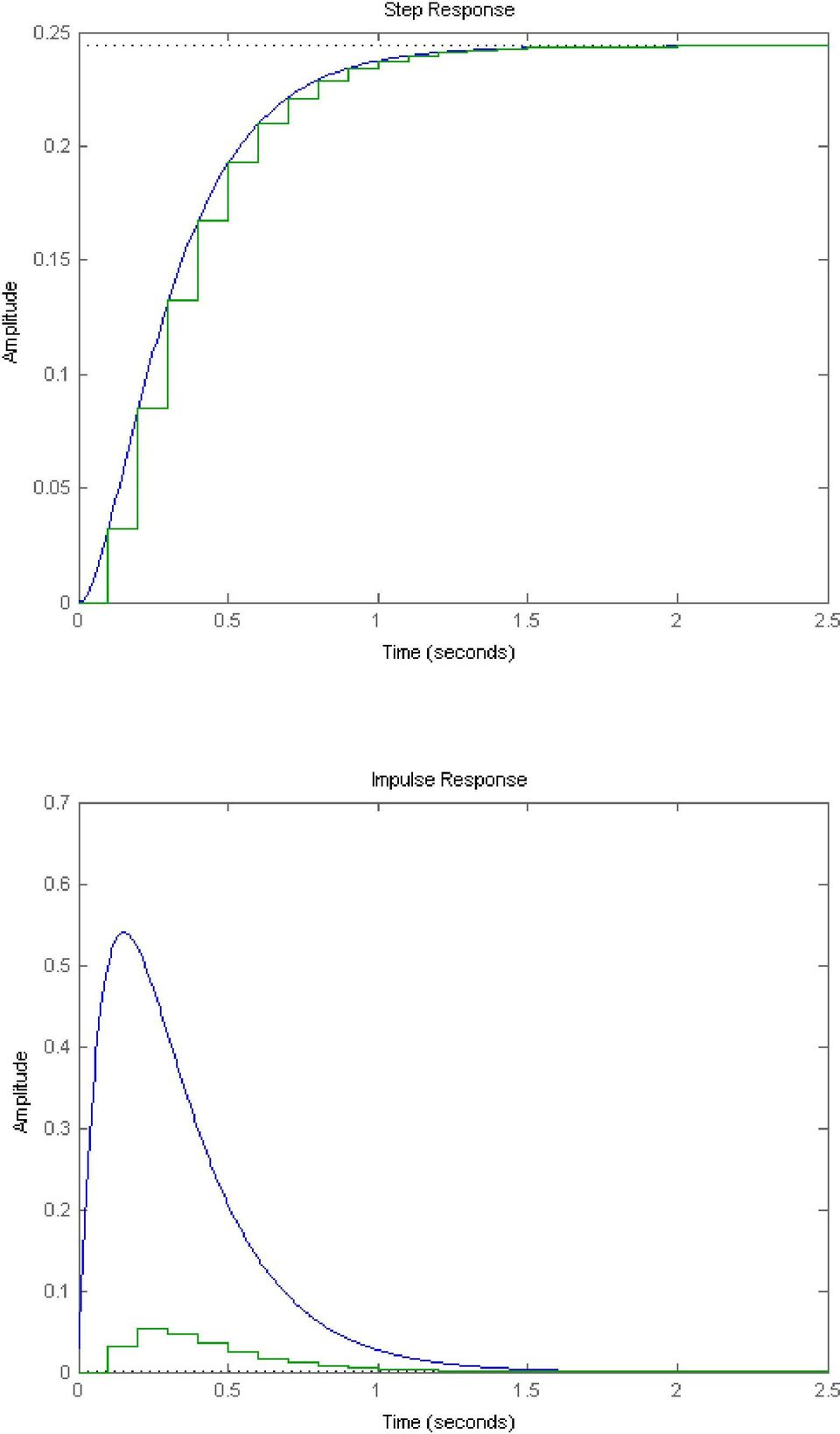
20 Görülebileceği üzere ayrık zamanlı sistemin birim basamak cevabı sürekli zaman sistemininkine oldukça yakındır. Dürtü tepkileri uyuşmamaktadır ancak bu beklenen bir durumdur çünkü sürekli zaman dürtüsü sonsuz genlikte bir sinyal olup, ayrı zaman dürtüsü ise genliği bir olan bir sinyaldir. Bu nedenle ayrık zaman dürtüsünde sistem daha az uyarılmakta ve daha düşük bir cevap vermektedir. Ayrık zamanlı sistemin Bode frekans cevabı da sürekli zaman sistemine yakındır ancak maksimum frekansa (dikey siyah çizgi) yaklaşıldıkça aradaki fark artmaktadır. Eğer bu çizgiye çok yakın frekanslarda çalışılması gerekiyorsa örnekleme frekansını arttırarak tekrar ayrıklaştırmak iyi olabilir. Birinci dereceden tutma (First-order hold - FOH) Ayrık sistemi hesapla: Gdf = c2d(g,ts,'foh') a = x1 x2 x x b = u1 x x c = x1 x2 y1 0 1 d =
 yaklaşıldıkça aradaki fark artmaktadır.")
21 u1 y Sampling time (seconds): 0.1 Discrete-time state-space model. Birim basamak, dürtü ve Bode cevabını çizdir: step(g,gdf); impulse(g,gdf); bode(g,gdf);
22 Görülebileceği üzere ayrık zamanlı sistemin birim basamak cevabı sürekli zaman sistemininkine oldukça yakındır. Dürtü tepkileri uyuşmamaktadır ancak bu beklenen bir durumdur çünkü sürekli zaman dürtüsü sonsuz genlikte bir sinyal olup, ayrı zaman dürtüsü ise genliği bir olan bir sinyaldir. Bu nedenle ayrık zaman dürtüsünde sistem daha az uyarılmakta ve daha düşük bir cevap vermektedir. Ayrık zamanlı sistemin Bode frekans cevabı da sürekli zaman sistemine yakındır. Maksimum
23 frekansa (dikey siyah çizgi) yaklaşıldıkça aradaki fark biraz açılmaktadır ancak önceki duruma göre (ZOH) çok daha iyi bir uyum görülmektedir. Yine de eğer bu çizgiye çok çok yakın frekanslarda çalışılması gerekiyorsa örnekleme frekansını arttırarak tekrar ayrıklaştırmak iyi olabilir. Dürtü cevabı eşleme (Impulse Invariant Mapping) Ayrık sistemi hesapla: Gdi = c2d(g,ts,'impulse') a = x1 x2 x x b = u1 x x c = x1 x2 y1 0 1 d = u1 y1 0 Sampling time (seconds): 0.1 Discrete-time state-space model. Birim basamak, dürtü ve Bode cevabını çizdir: step(g,gdi); impulse(g,gdi); bode(g,gdi);
24
25 Dürtü eşleme yaklaşımındaki temel amaç, ayrık zamanın dürtü cevabı ile sürekli zamanın dürtü cevabını birbirine uydurmaktır. Genellikle ayrıklaştırma sonucında bu ikisinin birbine uzak olduğunu söylemiştik çünkü sürekli zaman dürtüsü sonsuz genlikte bir sinyal olup, ayrı zaman dürtüsü ise genliği bir olan bir sinyaldir. Ama bazı uygulamalarda ve filtre tasarımlarında dürtü cevaplarının uyuşması arzu edilebilmektedir; bu gibi durumlarda dürtü cevabı eşleme yöntemi tercih edilebilir. Ancak bu yaklaşım kullanıldığında, şekillerden de görülebileceği üzere, sürekli ve ayrık zamanın birim basamak ve Bode cevaplarında büyük uyumsuzluklar meydana gelebilmesini de göze almak gerekir. Çift doğrusal (Tustin) yaklaşıklaması (Bilinear/Tustin Approximation) Ayrık sistemi hesapla: Gdt = c2d(g,ts,'tustin') a = x1 x2 x x b = u1 x x c = x1 x2 y
26 d = u1 y Sampling time (seconds): 0.1 Discrete-time state-space model. Birim basamak, dürtü ve Bode cevabını çizdir: step(g,gdt); impulse(g,gdt); bode(g,gdt);
27 Görülebileceği üzere ayrık zamanlı sistemin birim basamak cevabı sürekli zaman sistemininkine oldukça yakındır. Dürtü tepkileri uyuşmamaktadır ancak bu beklenen bir durumdur çünkü sürekli zaman dürtüsü sonsuz genlikte bir sinyal olup, ayrı zaman dürtüsü ise genliği bir olan bir sinyaldir. Bu nedenle ayrık zaman dürtüsünde sistem daha az uyarılmakta ve daha düşük bir cevap vermektedir. Ayrık zamanlı sistemin Bode frekans cevabı da sürekli zaman sistemine yakındır ancak maksimum
28 frekansa (dikey siyah çizgi) yaklaşıldıkça aradaki fark artmaktadır. Eğer bu çizgiye çok yakın frekanslarda çalışılması gerekiyorsa örnekleme frekansını arttırarak tekrar ayrıklaştırmak iyi olabilir. Kutup-sıfır eşleme (Pole-zero matching) Ayrık sistemi hesapla: Gdm = c2d(g,ts,'matched') a = x1 x2 x x b = u1 x1 0 x c = x1 x2 y d = u1 y1 0 Sampling time (seconds): 0.1 Discrete-time state-space model. Birim basamak, dürtü ve Bode cevabını çizdir: step(g,gdm); impulse(g,gdm); bode(g,gdm);
29
30 Görülebileceği üzere ayrık zamanlı sistemin birim basamak cevabı sürekli zaman sistemininkine oldukça yakındır. Dürtü tepkileri uyuşmamaktadır ancak bu beklenen bir durumdur çünkü sürekli zaman dürtüsü sonsuz genlikte bir sinyal olup, ayrı zaman dürtüsü ise genliği bir olan bir sinyaldir. Bu nedenle ayrık zaman dürtüsünde sistem daha az uyarılmakta ve daha düşük bir cevap vermektedir. Ayrık zamanlı sistemin Bode frekans cevabı da sürekli zaman sistemine yakındır ancak maksimum frekansa (dikey siyah çizgi) yaklaşıldıkça aradaki fark artmaktadır. Eğer bu çizgiye çok yakın frekanslarda çalışılması gerekiyorsa örnekleme frekansını arttırarak tekrar ayrıklaştırmak iyi olabilir. Bütün yöntemleri bir arada kıyaslama Tüm yöntemlerin birim basamak, dürtü ve Bode cevaplarını üst üste çizdirip karşılaştıralım. fs = 100; % Örnekleme frekansı Ts = 1/fs; % Örnekleme periyodu % Farklı ayrıklaştırma yöntemleri ile doğrusallaştır Gdz = c2d(g,ts,'zoh'); % Sıfırıncı dereceden tutma (Zero-order hold - ZOH) Gdf = c2d(g,ts,'foh'); % Birinci dereceden tutma (First-order hold - FOH) Gdi = c2d(g,ts,'impulse'); % Dürtü cevabı eşleme (Impulse Invariant Mapping) Gdt = c2d(g,ts,'tustin'); % Çift doğrusal (Tustin) yaklaşıklaması % (Bilinear/Tustin Approximation) Gdm = c2d(g,ts,'matched'); % Kutup-sıfır eşleme (Pole-zero matching) % Sonuçları üst üste çizdir step(g,gdz,gdf,gdi,gdt,gdm); % Birim basamak tepkisi legend('g(s)','zoh','foh','impulse','tustin','matched'); impulse(g,gdz,gdf,gdi,gdt,gdm); % Dürtü tepkisi legend('g(s)','zoh','foh','impulse','tustin','matched');
31 bode(g,gdz,gdf,gdi,gdt,gdm); % Bode ferkans cevabı legend('g(s)','zoh','foh','impulse','tustin','matched');
32 Şekiller incelendiğinde görülebilir ki, dürtü cevabı eşleme ('impulse' s seçeneği) dışındaki ayrık zamanlı sistemlerin birim basamak cevabı sürekli zaman sistemininkine oldukça yakındır ancak dürtü tepkileri uyuşmamaktadır. Dürtü cevabı eşleme ('impulse' seçeneği) kullanıldığında ise birim basamak cevapları uymamakta fakat dürtü cevapları uymaktadır. Bode eğrilerine bakıldığında Nyquist frekansına (dikey siyah çizgi) çok fazla yaklaşılmadığı sürece dürtü cevabı eşleme ('impulse') haricindeki tüm yöntemler kabul edilebilir sonuçlar vermektedir. Makismum frekansa yaklaşıldıkça ise tepkiler değişik ölçülerde bozulmaktadır. Eldeki problem için en az bozulmayı veren yaklaşım birinci dereceden tutma ('foh') olarak gözükmektedir; eğer maksimum frekansa çok yakın çalışılması gereken bir uygulama ile uğraşılıyorsa bu teknik tercih edilebilir. Published with MATLAB 7.13
Contents. Doğrusal sistemler için kontrol tasarım yaklaşımları
 Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Sensörlerin ölçümlerinde bir miktar hata payı olması. Ölçümlere gürültü karışması.
 Contents Kalman filtresi uygulamaları Kalman filtresinin temelleri DC motor modeli üzerinde Kalman filtresi Kalman filtresi için tümleşik sistem oluşturma Kalman filtresi için parametre seçimi Kalman filtresini
Contents Kalman filtresi uygulamaları Kalman filtresinin temelleri DC motor modeli üzerinde Kalman filtresi Kalman filtresi için tümleşik sistem oluşturma Kalman filtresi için parametre seçimi Kalman filtresini
ELN3052 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - 2 TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI:
 ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
MATLAB'dan doğrusal sistemlerin matematiksel modellemesi için transfer fonksiyonu, sıfırkutup-kazanç, durum uzayı vs. gösterimler kullanılabilir.
 Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
Contents MATLAB'da doğrusal sistem modelleri Transfer fonksiyonu gösterimi Transfer fonksiyonu ile ilgili bazı faydalı komutlar Transfer fonksiyonunun sıfırlar, kutuplar ve kazanç (zpk) olarak ifadesi
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
Bu soruda eğik şekilde belli bir hızda ve değişik açılarda atılan ve sonrasında yerden seken bir topun hareketini ifade eden kod yazılacaktır.
 ÖDEV 1 Aşağıdaki soruları çözerek en geç 23 Şubat 2014 Pazar günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması, hem de sizlere yol
ÖDEV 1 Aşağıdaki soruları çözerek en geç 23 Şubat 2014 Pazar günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması, hem de sizlere yol
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER
 TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
EEM 452 Sayısal Kontrol Sistemleri /
 EEM 452 Sayısal Kontrol Sistemleri / Yrd. Doç. Dr. Rıfat HACIOĞLU Bahar 2016 257 4010-1625, hacirif@beun.edu.tr EEM452 Sayısal Kontrol Sistemleri (3+0+3) Zamanda Ayrık Sistemlerine Giriş. Sinyal değiştirme,
EEM 452 Sayısal Kontrol Sistemleri / Yrd. Doç. Dr. Rıfat HACIOĞLU Bahar 2016 257 4010-1625, hacirif@beun.edu.tr EEM452 Sayısal Kontrol Sistemleri (3+0+3) Zamanda Ayrık Sistemlerine Giriş. Sinyal değiştirme,
SİNYALLER VE SİSTEMLERİN MATLAB YARDIMIYLA BENZETİMİ
 SİNYALLER VE SİSTEMLERİN MATLAB YARDIMIYLA BENZETİMİ 2.1. Sinyal Üretimi Bu laboratuarda analog sinyaller ve sistemlerin sayısal bir ortamda benzetimini yapacağımız için örneklenmiş sinyaller üzerinde
SİNYALLER VE SİSTEMLERİN MATLAB YARDIMIYLA BENZETİMİ 2.1. Sinyal Üretimi Bu laboratuarda analog sinyaller ve sistemlerin sayısal bir ortamda benzetimini yapacağımız için örneklenmiş sinyaller üzerinde
YÜZÜNCÜ YIL ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG ELEKTRONİK DENEY RAPORU
 YÜZÜNCÜ YIL ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG ELEKTRONİK DENEY RAPORU DENEY NO : DENEYİN ADI : YAPILIŞ TARİHİ: GRUP ÜYELERİ : 1. 2. 3. DERSİN SORUMLU ÖĞRETİM ÜYESİ: Yrd. Doç.
YÜZÜNCÜ YIL ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ANALOG ELEKTRONİK DENEY RAPORU DENEY NO : DENEYİN ADI : YAPILIŞ TARİHİ: GRUP ÜYELERİ : 1. 2. 3. DERSİN SORUMLU ÖĞRETİM ÜYESİ: Yrd. Doç.
girişli, çıkışlı ve durumlu doğrusal olmayan bir sistemin denklemleri aşağıdaki gibi ifade edilebilir:
 ÖDEV 2 Aşağıdaki soruları çözerek en geç 26 Mart 2014 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen
ÖDEV 2 Aşağıdaki soruları çözerek en geç 26 Mart 2014 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4B: DC MOTOR TRANSFER FONKSİYONU VE PARAMETRELERİNİN ELDE EDİLMESİ
 Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
Geç teslim edilen raporlardan gün başına 10 puan kırılır. Raporlarınızı deneyden en geç bir hafta sonra teslim etmeniz gerekmektedir. Raporunuzu yazarken föyde belirtilmeyen ancak önemli gördüğünüz kısımların
Bu ders boyunca, ilk önce sayısal kontrol sistemlerinin temellerini tanıtıp, daha sonra birkaç temel pratik uygulamasından bahsedeceğiz.
 Özellikle 2000 li yıllarda dijital teknolojideki gelişmeler, dijital (sayısal) kontrol sistemlerini analog kontrol sistemleriyle rekabet açısından 90 lı yıllara göre daha üst seviyelere taşımıştır. Düşük
Özellikle 2000 li yıllarda dijital teknolojideki gelişmeler, dijital (sayısal) kontrol sistemlerini analog kontrol sistemleriyle rekabet açısından 90 lı yıllara göre daha üst seviyelere taşımıştır. Düşük
ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER
 ADC ve DAC 1 BM-201 2 ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER Maksimum ve minimum sınırları arasında farklı değerler alarak değişken elektriksel büyüklüklere analog bilgi ya da analog değer denir. Akım ve gerilim
ADC ve DAC 1 BM-201 2 ANOLOG-DİJİTAL DÖNÜŞTÜRÜCÜLER Maksimum ve minimum sınırları arasında farklı değerler alarak değişken elektriksel büyüklüklere analog bilgi ya da analog değer denir. Akım ve gerilim
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
SÜREKLİ VE AYRIK ZAMANLI KONTROL SİSTEMLERİNDE KULLANILAN TEMEL MATEMATİKSEL OPERASYONLAR VE KARAKTERİSTİKLERİ
 FIRT ÜNİVERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ EMÜ419 OTOMTİK KONTROL LORTURI DENEY 1 SÜREKLİ VE YRIK ZMNLI KONTROL SİSTEMLERİNDE KULLNILN TEMEL MTEMTİKSEL OPERSYONLR VE KRKTERİSTİKLERİ
FIRT ÜNİVERSİTESİ MÜHENDİSLİK FKÜLTESİ ELEKTRİKELEKTRONİK MÜHENDİSLİĞİ ÖLÜMÜ EMÜ419 OTOMTİK KONTROL LORTURI DENEY 1 SÜREKLİ VE YRIK ZMNLI KONTROL SİSTEMLERİNDE KULLNILN TEMEL MTEMTİKSEL OPERSYONLR VE KRKTERİSTİKLERİ
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ
 DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
MATLAB Semineri. EM 314 Kontrol Sistemleri 1 GÜMMF Elektrik-Elektronik Müh. Bölümü. 30 Nisan / 1 Mayıs 2007
 MATLAB Semineri EM 314 Kontrol Sistemleri 1 GÜMMF Elektrik-Elektronik Müh. Bölümü 30 Nisan / 1 Mayıs 2007 İçerik MATLAB Ekranı Değişkenler Operatörler Akış Kontrolü.m Dosyaları Çizim Komutları Yardım Kontrol
MATLAB Semineri EM 314 Kontrol Sistemleri 1 GÜMMF Elektrik-Elektronik Müh. Bölümü 30 Nisan / 1 Mayıs 2007 İçerik MATLAB Ekranı Değişkenler Operatörler Akış Kontrolü.m Dosyaları Çizim Komutları Yardım Kontrol
EEM 451 Dijital Sinyal İşleme LAB 3
 EEM 451 Dijital Sinyal İşleme LAB 3 1. AMAÇ Ayrık zamanlı filtrelerin implementasyonu, çeşitleri FIR filtrelerinin incelenmesi FIR filtresi dizayn edilmesi 2. TEMEL BİLGİLER 2.1 FIR(Finite impulse response)
EEM 451 Dijital Sinyal İşleme LAB 3 1. AMAÇ Ayrık zamanlı filtrelerin implementasyonu, çeşitleri FIR filtrelerinin incelenmesi FIR filtresi dizayn edilmesi 2. TEMEL BİLGİLER 2.1 FIR(Finite impulse response)
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ
 SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi
 Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 41 Bu bölümde aşağıdaki konular incelenecektir: Nümerik
Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 41 Bu bölümde aşağıdaki konular incelenecektir: Nümerik
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yükseltici DA Kıyıcılar, Gerilim beslemeli invertörler / 12. Hafta
 E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
Kodumuzu yazmaya zaman eksenini, açısal frekans ekseni ve örnekte verilen M değerlerini bir vektör içinde tanımlayarak başlayalım.
 Örneklenmiş Sinyalin Alt Örneklenmesi Var olan örneklerden bazılarının seçilme işlemi alt örnekleme, örnek azaltma veya dijital sinyallerin örneklenmesi gibi isimlendirilebilir, bu işlemin bir örneklenmiş
Örneklenmiş Sinyalin Alt Örneklenmesi Var olan örneklerden bazılarının seçilme işlemi alt örnekleme, örnek azaltma veya dijital sinyallerin örneklenmesi gibi isimlendirilebilir, bu işlemin bir örneklenmiş
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü ELK 2008 DEVRELER II LABORATUARI
 DİRENÇ-ENDÜKTANS VE DİRENÇ KAPASİTANS FİLTRE DEVRELERİ HAZIRLIK ÇALIŞMALARI 1. Alçak geçiren filtre devrelerinin çalışmasını anlatınız. 2. Yüksek geçiren filtre devrelerinin çalışmasını anlatınız. 3. R-L
DİRENÇ-ENDÜKTANS VE DİRENÇ KAPASİTANS FİLTRE DEVRELERİ HAZIRLIK ÇALIŞMALARI 1. Alçak geçiren filtre devrelerinin çalışmasını anlatınız. 2. Yüksek geçiren filtre devrelerinin çalışmasını anlatınız. 3. R-L
DURUM GERİBESLEMESİ. Contents
 DURUM GERİBESLEMESİ Contents DC motor modeli DC motor modeline pozisyon bilgisi eklenmesi Sistemi oluştur (pozisyon dahil) İlk durum (sıfır giriş cevabı) İlk durum (sıfır giriş cevabı), durumlarla beraber
DURUM GERİBESLEMESİ Contents DC motor modeli DC motor modeline pozisyon bilgisi eklenmesi Sistemi oluştur (pozisyon dahil) İlk durum (sıfır giriş cevabı) İlk durum (sıfır giriş cevabı), durumlarla beraber
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Kırım Filtresi ve Alt Örnekleme
 Kırım Filtresi ve Alt Örnekleme Örneklenmiş bir sinyalin örnek azaltma işleminde M değerleri arttıkça spektral örtüşme kaçınılmaz hale gelmektedir, bu spektral örtüşmeden kaynaklı veri kaybını yok edemeyiz
Kırım Filtresi ve Alt Örnekleme Örneklenmiş bir sinyalin örnek azaltma işleminde M değerleri arttıkça spektral örtüşme kaçınılmaz hale gelmektedir, bu spektral örtüşmeden kaynaklı veri kaybını yok edemeyiz
BÖLÜM 1.A Bir sisteme belli frekanslar arasında rastgele bir gürültü karıştığını varsayalım. Örneğin
 ÖDEV 2 Aşağıdaki soruları çözerek en geç 8 Mart 2016 Salı günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen aşağıdaki
ÖDEV 2 Aşağıdaki soruları çözerek en geç 8 Mart 2016 Salı günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Ödevleri gönderirken sıkıntı yaşanmaması için lütfen aşağıdaki
Sayısal Kontrol - HAVA HARP OKULU
 Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop. Teorik Bilgi
, bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop. Teorik Bilgi") DENEY 8: PASİF FİLTRELER Deneyin Amaçları Pasif filtre devrelerinin çalışma mantığını anlamak. Deney Malzemeleri Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop.
DENEY 8: PASİF FİLTRELER Deneyin Amaçları Pasif filtre devrelerinin çalışma mantığını anlamak. Deney Malzemeleri Direnç(330Ω), bobin(1mh), sığa(100nf), fonksiyon generatör, multimetre, breadboard, osiloskop.
SAYISAL KONTROL 2 PROJESİ
 SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
Algoritmalar ve Programlama. DERS - 4 Yrd. Doç. Dr. Ahmet SERBES
 Algoritmalar ve Programlama DERS - 4 Yrd. Doç. Dr. Ahmet SERBES Geçen Derste Değişken oluşturma Skaler Diziler, vektörler Matrisler Aritmetik işlemler Bazı fonksiyonların kullanımı Operatörler İlk değer
Algoritmalar ve Programlama DERS - 4 Yrd. Doç. Dr. Ahmet SERBES Geçen Derste Değişken oluşturma Skaler Diziler, vektörler Matrisler Aritmetik işlemler Bazı fonksiyonların kullanımı Operatörler İlk değer
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
MAK1010 MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI
 .. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
.. MAK MAKİNE MÜHENDİSLİĞİ BİLGİSAYAR UYGULAMALARI Polinom MATLAB p=[8 ] d=[ - ] h=[ -] c=[ - ] POLİNOMUN DEĞERİ >> polyval(p, >> fx=[ -..9 -. -.9.88]; >> polyval(fx,9) ans =. >> x=-.:.:.; >> y=polyval(fx,;
31 Mart 2017 Cuma 23:59 tek epostada tek epostada
 ELE 515-2016/17 BAHAR - ÖDEV 2 Aşağıdaki soruları çözerek en geç 31 Mart 2017 Cuma gunu saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması,
ELE 515-2016/17 BAHAR - ÖDEV 2 Aşağıdaki soruları çözerek en geç 31 Mart 2017 Cuma gunu saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların açıklaması,
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ İLETİŞİM LABORATUARI SAYISAL FİLTRELER
 SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
SAYISAL FİLTRELER Deney Amacı Sayısal filtre tasarımının ve kullanılmasının öğrenilmesi. Kapsam Ayrık zamanlı bir sistem transfer fonksiyonunun elde edilmesi. Filtren frekans tepkes elde edilmesi. Direct
Kontrol Sistemleri Tasarımı
 Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
DENEY 4: SERİ VE PARALEL REZONANS DEVRELERİ
 Deneyin Amacı DENEY 4: SERİ VE PARALEL REZONANS DEVRELERİ Seri ve paralel RLC devrelerinde rezonans durumunun gözlenmesi, rezonans eğrisinin elde edilmesi ve devrenin karakteristik parametrelerinin ölçülmesi
Deneyin Amacı DENEY 4: SERİ VE PARALEL REZONANS DEVRELERİ Seri ve paralel RLC devrelerinde rezonans durumunun gözlenmesi, rezonans eğrisinin elde edilmesi ve devrenin karakteristik parametrelerinin ölçülmesi
DENEY 5: FREKANS CEVABI VE BODE GRAFİĞİ
 DENEY 5: FREKANS CEVABI VE BODE GRAFİĞİ 1 AMAÇ Bu deneyin temel amacı; bant geçiren ve alçak geçiren seri RLC filtrelerin cevabını incelemektir. Ayrıca frekans cevabı deneyi neticesinde elde edilen verileri
DENEY 5: FREKANS CEVABI VE BODE GRAFİĞİ 1 AMAÇ Bu deneyin temel amacı; bant geçiren ve alçak geçiren seri RLC filtrelerin cevabını incelemektir. Ayrıca frekans cevabı deneyi neticesinde elde edilen verileri
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
STEM komutu ayrık zamanlı sinyalleri veya fonksiyonları çizmek amacı ile kullanılır. Bu komutun en basit kullanım şekli şöyledir: stem(x,y).
.") STEM Komutu: STEM komutu ayrık zamanlı sinyalleri veya fonksiyonları çizmek amacı ile kullanılır. Bu komutun en basit kullanım şekli şöyledir: stem(x,y). Bu komutta X vektörünün ve Y vektörünün elemanları
STEM Komutu: STEM komutu ayrık zamanlı sinyalleri veya fonksiyonları çizmek amacı ile kullanılır. Bu komutun en basit kullanım şekli şöyledir: stem(x,y). Bu komutta X vektörünün ve Y vektörünün elemanları
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM 202 DENEY 9 Ad&Soyad: No: RC DEVRELERİ-II DEĞİŞKEN BİR FREKANSTA RC DEVRELERİ (FİLTRELER)
") EEM 0 DENEY 9 Ad&oyad: R DEVRELERİ-II DEĞİŞKEN BİR FREKANTA R DEVRELERİ (FİLTRELER) 9. Amaçlar Değişken frekansta R devreleri: Kazanç ve faz karakteristikleri Alçak-Geçiren filtre Yüksek-Geçiren filtre
EEM 0 DENEY 9 Ad&oyad: R DEVRELERİ-II DEĞİŞKEN BİR FREKANTA R DEVRELERİ (FİLTRELER) 9. Amaçlar Değişken frekansta R devreleri: Kazanç ve faz karakteristikleri Alçak-Geçiren filtre Yüksek-Geçiren filtre
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
DENEY 1: Matlab de Temel Haberleşme Sistemleri Uygulamaları
 DENEY 1: Matlab de Temel Haberleşme Sistemleri Uygulamaları AMAÇ: MATLAB programının temel özelliklerinin öğrenilmesi, analog işaretler ve sistemlerin sayısal bir ortamda benzetiminin yapılması ve incelenmesi.
DENEY 1: Matlab de Temel Haberleşme Sistemleri Uygulamaları AMAÇ: MATLAB programının temel özelliklerinin öğrenilmesi, analog işaretler ve sistemlerin sayısal bir ortamda benzetiminin yapılması ve incelenmesi.
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı
 Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 72 Bu bölümde aşağıdaki konular incelenecektir: Tasarım Yöntemlerine
Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 72 Bu bölümde aşağıdaki konular incelenecektir: Tasarım Yöntemlerine
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
Şekil 1.1 ve Şekil 1.2 Kod Akışı
 Şekil 1.1 ve Şekil 1.2 Kod Akışı sinyal_uzunlugu=0:0.5:120; xt = rand(1, length(sinyal_uzunlugu)); plot(sinyal_uzunlugu,xt, 'Color','k','LineWidth',2), grid on, xlabel('t (Surekli Zaman Bagimsiz Degiskeni)'),
Şekil 1.1 ve Şekil 1.2 Kod Akışı sinyal_uzunlugu=0:0.5:120; xt = rand(1, length(sinyal_uzunlugu)); plot(sinyal_uzunlugu,xt, 'Color','k','LineWidth',2), grid on, xlabel('t (Surekli Zaman Bagimsiz Degiskeni)'),
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") 1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
L300P GÜÇ BAĞLANTISI BAĞLANTI TERMİNALLERİ
 L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
Ayrık Zamanlı Sistem Simülatörü Discrete Time System Simulator
 Ayrık Zamanlı Sistem Simülatörü Discrete Time System Simulator 1 Metin Hatun * 1 Fahri Vatansever * 1 Faculty of Engineering Electrical-Electronics Engineering Dept. Uludag University Turkey Özet Doğal
Ayrık Zamanlı Sistem Simülatörü Discrete Time System Simulator 1 Metin Hatun * 1 Fahri Vatansever * 1 Faculty of Engineering Electrical-Electronics Engineering Dept. Uludag University Turkey Özet Doğal
OTOMATİK KONTROL 18.10.2015
 18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
Dijital Kontrol Sistemleri Prof.Dr. Ayhan Özdemir. Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir.
 Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Fen ve Mühendislik Uygulamalarında MATLAB
 Fen ve Mühendislik Uygulamalarında MATLAB Dosya Yönetimi Fonksiyon Yapısı Doç. Dr. İrfan KAYMAZ MATLAB Ders Notları DOSYA YÖNETİMİ Şu ana kadar bir programda hesaplanan veya elde edilen veriler RAM de
Fen ve Mühendislik Uygulamalarında MATLAB Dosya Yönetimi Fonksiyon Yapısı Doç. Dr. İrfan KAYMAZ MATLAB Ders Notları DOSYA YÖNETİMİ Şu ana kadar bir programda hesaplanan veya elde edilen veriler RAM de
DENEY-2 ANİ DEĞER, ORTALAMA DEĞER VE ETKİN DEĞER
 DENEY-2 ANİ DEĞER, ORTALAMA DEĞER VE ETKİN DEĞER TEORİK BİLGİ Alternatıf akımın elde edilmesi Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Alternatif
DENEY-2 ANİ DEĞER, ORTALAMA DEĞER VE ETKİN DEĞER TEORİK BİLGİ Alternatıf akımın elde edilmesi Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Alternatif
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
Matlab da 2-boyutlu Grafik Çizimi. Arş. Gör. Mehmet Ali ÜSTÜNER
 Matlab da 2-boyutlu Grafik Çizimi Arş Gör Mehmet Ali ÜSTÜNER Manisa, 03122017 Arş Gör Mehmet Ali ÜSTÜNER 2 Dikdörtgen (x-y) Ve Kutupsal Eksenlerde Çizgi Grafikleri: En basit çizim, iki değişkeni olan çizimlerdir
Matlab da 2-boyutlu Grafik Çizimi Arş Gör Mehmet Ali ÜSTÜNER Manisa, 03122017 Arş Gör Mehmet Ali ÜSTÜNER 2 Dikdörtgen (x-y) Ve Kutupsal Eksenlerde Çizgi Grafikleri: En basit çizim, iki değişkeni olan çizimlerdir
ELE /16 BAHAR DÖNEMİ - ÖDEV
 ELE 515-2015/16 BAHAR DÖNEMİ - ÖDEV 1 Aşağıdaki soruları çözerek en geç 17 Şubat 2016 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların
ELE 515-2015/16 BAHAR DÖNEMİ - ÖDEV 1 Aşağıdaki soruları çözerek en geç 17 Şubat 2016 Çarşamba günü saat 23:59'a kadar bana ve dersin asistanına ilgili dosyaları eposta ile gönderin. Aşağıda hem soruların
RF MİKROELEKTRONİK GÜRÜLTÜ
 RF MİKROELEKTRONİK GÜRÜLTÜ RASTGELE BİR SİNYAL Gürültü rastgele bir sinyal olduğu için herhangi bir zamandaki değerini tahmin etmek imkansızdır. Bu sebeple tekrarlayan sinyallerde de kullandığımız ortalama
RF MİKROELEKTRONİK GÜRÜLTÜ RASTGELE BİR SİNYAL Gürültü rastgele bir sinyal olduğu için herhangi bir zamandaki değerini tahmin etmek imkansızdır. Bu sebeple tekrarlayan sinyallerde de kullandığımız ortalama
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
DENEY-4. Transistörlü Yükselteçlerin Frekans Analizi
 DENEY-4 Transistörlü Yükselteçlerin Frekans Analizi Deneyin Amacı: BJT yapmak. transistörlerle yapılan yükselteçlerin alçak ve yüksek frekans analizlerini Teorinin Özeti: Şimdiye kadar gördüğümüz transistörlü
DENEY-4 Transistörlü Yükselteçlerin Frekans Analizi Deneyin Amacı: BJT yapmak. transistörlerle yapılan yükselteçlerin alçak ve yüksek frekans analizlerini Teorinin Özeti: Şimdiye kadar gördüğümüz transistörlü
Ayrık Fourier Dönüşümü
 Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Ayrık Fourier Dönüşümü Tanım: 0 n N 1 aralığında tanımlı N uzunluklu bir dizi x[n] nin AYRIK FOURIER DÖNÜŞÜMÜ (DFT), ayrık zaman Fourier dönüşümü (DTFT) X(e jω ) nın0 ω < 2π aralığında ω k = 2πk/N, k =
Sayısal İşaret İşleme Dersi Laboratuvarı
 1. Örnekleme Öncelikle boş bir m dosyası oluşturarak aşağıdaki kodları bu boş m dosyasının içine yazılacaktır. Periyodik bir sinyal olan x(t) = Acos ( 2π T 0 t) = 6cos (2000πt) sinyali incelenmek üzere
1. Örnekleme Öncelikle boş bir m dosyası oluşturarak aşağıdaki kodları bu boş m dosyasının içine yazılacaktır. Periyodik bir sinyal olan x(t) = Acos ( 2π T 0 t) = 6cos (2000πt) sinyali incelenmek üzere
NJ Kontrolcüler için PIDAT Uygulaması. PIDAT Fonksiyon Bloğu PIDAT Fonk. Bloğu Değişkenleri SSR Çıkışı
 NJ Kontrolcüler için PIDAT Uygulaması PIDAT Fonksiyon Bloğu PIDAT Fonk. Bloğu Değişkenleri SSR Çıkışı PIDAT Fonksiyon Bloğu PID kontrol aşağıdaki blok şemada gösterildiği gibi ortam değerini ulaşılmak
NJ Kontrolcüler için PIDAT Uygulaması PIDAT Fonksiyon Bloğu PIDAT Fonk. Bloğu Değişkenleri SSR Çıkışı PIDAT Fonksiyon Bloğu PID kontrol aşağıdaki blok şemada gösterildiği gibi ortam değerini ulaşılmak
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
MKT 210 OTOMATĠK KONTROL
 KOCAELĠ ÜNĠVERSĠTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MKT 210 OTOMATĠK KONTROL Doç.Dr. H.Metin ERTUNÇ 2012 BAHAR DÖNEMĠ ĠĢlenecek konular Kontrol sistemlerinin tanımı. Kontrol sistemlerinin önemi. Kontrol
KOCAELĠ ÜNĠVERSĠTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MKT 210 OTOMATĠK KONTROL Doç.Dr. H.Metin ERTUNÇ 2012 BAHAR DÖNEMĠ ĠĢlenecek konular Kontrol sistemlerinin tanımı. Kontrol sistemlerinin önemi. Kontrol
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
MATLAB a GİRİŞ. Doç. Dr. Mehmet İTİK. Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü
 MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
KISIM 1 ELEKTRONİK DEVRELER (ANALİZ TASARIM - PROBLEM)
") İÇİNDEKİLER KISIM 1 ELEKTRONİK DEVRELER (ANALİZ TASARIM - PROBLEM) 1. BÖLÜM GERİBESLEMELİ AMPLİFİKATÖRLER... 3 1.1. Giriş...3 1.2. Geribeselemeli Devrenin Transfer Fonksiyonu...4 1.3. Gerilim - Seri Geribeslemesi...5
İÇİNDEKİLER KISIM 1 ELEKTRONİK DEVRELER (ANALİZ TASARIM - PROBLEM) 1. BÖLÜM GERİBESLEMELİ AMPLİFİKATÖRLER... 3 1.1. Giriş...3 1.2. Geribeselemeli Devrenin Transfer Fonksiyonu...4 1.3. Gerilim - Seri Geribeslemesi...5
ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU
 T.C. MARMARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU Mehmet SUCU (Teknik Öğretmen, BSc.)
T.C. MARMARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ELEKTRİK ENERJİ SİSTEMLERİNDE OLUŞAN HARMONİKLERİN FİLTRELENMESİNİN BİLGİSAYAR DESTEKLİ MODELLENMESİ VE SİMÜLASYONU Mehmet SUCU (Teknik Öğretmen, BSc.)
ANALOG İLETİŞİM. 3. Kanal ayrımı sağlar. Yani modülasyon sayesinde aynı iletim hattında birden çok bilgi yollama olanağı sağlar.
 ANALOG İLETİŞİM Modülasyon: Çeşitli kaynaklar tarafından üretilen temel bant sinyalleri kanalda doğrudan iletim için uygun değildir. Bu nedenle, gönderileek bilgi işareti, iletim kanalına uygun bir biçime
ANALOG İLETİŞİM Modülasyon: Çeşitli kaynaklar tarafından üretilen temel bant sinyalleri kanalda doğrudan iletim için uygun değildir. Bu nedenle, gönderileek bilgi işareti, iletim kanalına uygun bir biçime
ideal Sistem Tester Kullanım Klavuzu
 1- Sistem Modülüne Giriş ideal Sistem Tester Kullanım Klavuzu Herhangi bir Grafik penceresinin başlığındaki S harfine basılarak açılan menüden yapılabilen seçimlerle kullanılmaya başlanır. Bu menüden,
1- Sistem Modülüne Giriş ideal Sistem Tester Kullanım Klavuzu Herhangi bir Grafik penceresinin başlığındaki S harfine basılarak açılan menüden yapılabilen seçimlerle kullanılmaya başlanır. Bu menüden,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1
 6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
Şekil 1. Geri beslemeli yükselteçlerin genel yapısı
 DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
DENEY 5: GERİ BESLEME DEVRELERİ 1 Malzeme Listesi Direnç: 1x82K ohm, 1x 8.2K ohm, 1x12K ohm, 1x1K ohm, 2x3.3K ohm, 1x560K ohm, 1x9.1K ohm, 1x56K ohm, 1x470 ohm, 1x6.8K ohm Kapasite: 4x10uF, 470 uf, 1nF,4.7uF
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
Sayısal Filtre Tasarımı
 Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
ALTERNATİF AKIM (AC) II SİNÜSOİDAL DALGA; KAREKTRİSTİK ÖZELLİKLERİ
 II SİNÜSOİDAL DALGA; KAREKTRİSTİK ÖZELLİKLERİ") . Amaçlar: EEM DENEY ALERNAİF AKIM (AC) II SİNÜSOİDAL DALGA; KAREKRİSİK ÖZELLİKLERİ Fonksiyon (işaret) jeneratörü kullanılarak sinüsoidal dalganın oluşturulması. Frekans (f), eriyot () ve açısal frekans
. Amaçlar: EEM DENEY ALERNAİF AKIM (AC) II SİNÜSOİDAL DALGA; KAREKRİSİK ÖZELLİKLERİ Fonksiyon (işaret) jeneratörü kullanılarak sinüsoidal dalganın oluşturulması. Frekans (f), eriyot () ve açısal frekans
SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ
 SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ Fan yükleri, uygulama ihtiyaçları ve bu uygulamayı motor hız kontrol cihazları ile çözerken, uygulamanın özel ihtiyaçlarının neler olabileceğine daha yakından
SIEMENS MICROMASTER 430 ve FAN UYGULAMA ÖRNEKLERİ Fan yükleri, uygulama ihtiyaçları ve bu uygulamayı motor hız kontrol cihazları ile çözerken, uygulamanın özel ihtiyaçlarının neler olabileceğine daha yakından
DERS 5 PIC 16F84 PROGRAMLAMA İÇERİK. PIC 16F84 bacak bağlantıları PIC 16F84 bellek yapısı Program belleği RAM bellek Değişken kullanımı Komutlar
 DERS 5 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 bacak bağlantıları PIC 16F84 bellek yapısı Program belleği RAM bellek Değişken kullanımı Komutlar Ders 5, Slayt 2 1 BACAK BAĞLANTILARI Ders 5, Slayt 3 PIC
DERS 5 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 bacak bağlantıları PIC 16F84 bellek yapısı Program belleği RAM bellek Değişken kullanımı Komutlar Ders 5, Slayt 2 1 BACAK BAĞLANTILARI Ders 5, Slayt 3 PIC
Sürekli-zaman İşaretlerin Ayrık İşlenmesi
 Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
Sürekli-zaman İşaretlerin Ayrık İşlenmesi Bir sürekli-zaman işaretin sayısal işlenmesi üç adımdan oluşmaktadır: 1. Sürekli-zaman işaretinin bir ayrık-zaman işaretine dönüştürülmesi 2. Ayrık-zaman işaretin
OFF-GRID veya STAND-ALONE INVERTER NEDİR?
 ON-GRID veya GRID-TIE INVERTER NEDİR? On-Grid solar fotovoltaik sistem, şebekeye bağlı (paralel) bir sistem anlamına gelir. Güneş enerjisi kullanılabilir olduğu zaman, sistem şebekeye güneş tarafından
ON-GRID veya GRID-TIE INVERTER NEDİR? On-Grid solar fotovoltaik sistem, şebekeye bağlı (paralel) bir sistem anlamına gelir. Güneş enerjisi kullanılabilir olduğu zaman, sistem şebekeye güneş tarafından