MAK505 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
|
|
|
- İbrahi̇m Haşim
- 8 yıl önce
- İzleme sayısı:
Transkript
1 MAK505 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 2015-Güz Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu

2 Ders Konusunda Bilgiler Temel Dinamik Bilgisine sahip olmak MATLAB/Simulink bilgisine sahip olmak. Yıl İçi Sınavı Ödev ( ders içi ödev ve yıl sonu proje ödevi) Final Sınavı Derse devam zorunluluğu yoktur. Ders notları DersWeb de yayınlanmaktadır. Değerlendirme: Vize (%40) + Final(%40) + Ödev(%20)

3 Dersin Amaçları Mekanik, Elektrik ve Elektromekanik Sistemlerin Modelleme Yaklaşımları Modelleme Yöntemleri(Enerji Metodu, Newton Kanunu, Lagrange Yaklaşımı:) Matlab/Simulink esaslı simülasyon ve analiz Ödev çalışmaları ile simülasyon modeli oluşturma ve analiz yapma yeteneği kazandırmak. Ödev gönderme formatı: İsimSoyad_ÖdevNo.doc

4 Kaynaklar System Dynamics W. J. Palm, McGraw Hill, Simulation of Dynamic Systems, Harold Klee, Randal Allen, CRC Press 2011 Dynamic Modeling And Control Of Engıneering Systems Bohdan T. Kulakowski, John F. Gardner, J. Lowen Shearer Cambridge University Press, Modeling and Simulations of Systems Using Matlab D.K. Chatuvedi CRC Press 2010 Feedback Systems Karl Johan Astrom, Richard M. Murray PRINCETON UNIVERSITY PRESS, 2012 Tek bir kaynaktan takip yapılmıyor. Değişik kaynaklardan faydalanılıyor.

5 Modelleme yaklaşımı Gerçek mühendislik sistemlerini belirli yaklaşımlarla modellemenin amacı sistem dinamiğini etkiyen şartları ve parametreleri analiz etmektir ve en optimum tasarım için çözümleri bulmaktır. Bu modeller mühendislik anlamında tasarımda büyük avantaj sağlar. Gerçek Sistem Mekanik Model

6 Balans sistemleri Kontrol kitaplarında vazgeçilmez bir örnek problem olan ters sarkaç sistemi aslında bir çok mühendislik sisteminin modeli olarak düşünülebilir. mj, F pivot M p c Bir balans sistemi kütle merkezinin bir pivot noktasında dengelendiği mekanik bir sistemdir. Segway kişisel taşıyıcı motorize bir platform üzerinde duran kişiyi dengelemekte kullanır. Sürücü ileriye doğru eğildiğinde sensörler gidilecek yönü algılar ve taşıyıcı cihaz zemin üzerinde hareket eder düşey pozisyonu sağlar.


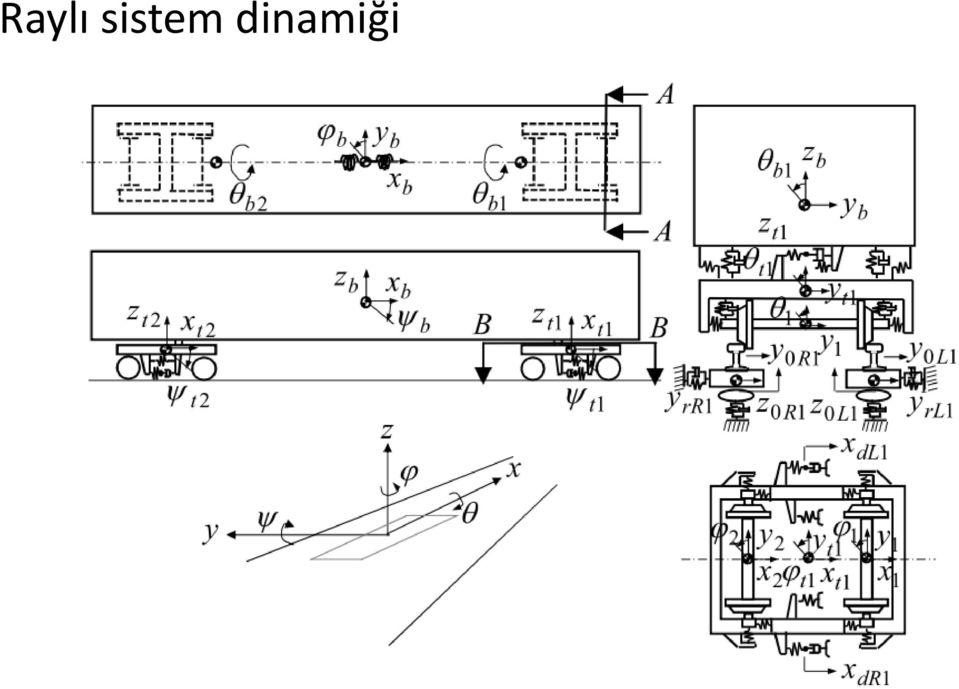
7 Maglev taşıt dinamiği Gerek otomobillerin gerekse raylı taşıtların dinamiği iyi bir sürüş ve konfor sağlamak için aktif bir araştırma konusu içinde yeralmaktadır. Maglev tren sistemleri mekanik temasın olmadığı bir ray sistemi üzerinde ilerlemektedir. Modelleme vagon ve bojinin manyetik ray üzerindeki dinamiğini yansıtacak şekilde yanal ve boylamasına olarak ayrı ayrı yapılmaktadır. K.Watanabe et al., A study of vibration control systems for superconducting Maglev Vehicles Journal of System Design and Dynamics, Vol.1, No.3, pp , Şekilde kesit resmi verilen sistemde Bojinin yanal hareketini, 1 Bojinin açısal dönme hareketini, y2 gövdenin yanal hareketini ve 2 gövdenin açısal dönme hareketini göstermektedir. Sistemin dinamik denklemleri her bir harekete göre verilmiştir. y 1

 Journal of System")
8 Maglev taşıt dinamiği Düşey ve başvurma(pitching) hareketin modellenmesi ve kontrolü K.Watanabe et al., A study of vibration control systems for superconducting Maglev Vehicles(vibration control of vertical and pitching motions) Journal of System Design and Dynamics, Vol.1, No4, pp , 2007.
 Journal of")
9 Bisiklet Dinamigi Bisiklet, ön çatal kısminin tasarımı ile oluşturulan geri besleme mekanizmasından dolayı var olan özellikleri nedeniyle ilginç bir dinamik sistemdir. Bir çok serbestlik derecesine sahip olmasından ve geometrisinin karmaşık olmasından dolayı bisikletin ayrıntılı modeli karmaşıktır


10 Değişken Hızlı Rüzgar Türbini Mekanik Modeli Düşük rüzgar hızlarında da enerji elde edebilmek için değişken hızlı rüzgar türbinleri kullanılmaktadır. K m Y.D. Song, B. Dhinakaran, X.Y. Bao,Variable speed control of wind turbines using nonlinear and adaptive algorithm, Journal of Wind Engineering and Industrial Aerodynamics, 85, pp , Tm T T p K e T e J e B e e B m

11 Raylı sistem dinamiği

12 Raylı sistem dinamiği

13 Raylı sistem dinamiği
14 Simülasyon ve analizler Modellemeden elde edilen hareket denklemleri (diferansiyel denklemler) transfer fonksiyonu ve durum uzayı denklemlerine dönüştürülebilir. Sistemin analizi zaman domeni cevapları frekans domeni cevapları üzerinden yapılabilir. Birçok mühendislik sistemi için analitik çözüm elde etmek mümkün olmayabilir. Değişik yöntemlerle elde edilen nümerik çözümler analizlerde kullanılmaktadır. 14

15 Sistem modelleme ve simülasyon- MATLAB/Simulink İkinci dereceden lineer bir sistem modelini düşünelim: d dt d dt z( t) 2 ( ) ( ) ( ) 2 n z t n z t Knu t burada u( t) sisteme olan giriştir. z( t) hesaplanması istenen değişkendir yani çıkışı göstermektedir. n, sisteme ait doğal frekansı ve sönümü göstemektedir. K sabit bir değerdir. ut ( ) nin adım girişi olması durumu için simülasyonunu yapı nız. sistemin

16 Sistem modelleme ve simülasyon- MATLAB/Simulink Temel simülasyon elemanları x x İntegrasyon x K Kx Kazanç x2 x1 x2 Toplama noktası x 1

17 Sistem modelleme ve simülasyon- MATLAB/Simulink İlk olarak en yüksek türevli terimi eşitliğin sol tarafında yalnız bırakalım d dt d dt z( t) 2 ( ) ( ) ( ) 2 n z t n z t Knu t Eşitliği toplama noktası olarak düşünelim ve eşitliğin sağ tarafındaki elemanları işaretlerini dikkate alarak toplama noktasına giriş olarak yazalım K 2 nu() t 2 zt () d 2 n zt ( ) - - n dt + 2 d () 2 zt dt d z ( t ) ve z ( t ) integre edilerek bulunacak değişkenlerdir. dt, ve K sisteme ait parametrelerdir. n
 - - n dt + 2 d () 2 zt dt d z ( t ) ve z ( t ) integre edilerek bulunacak değişkenlerdir.")
18 Sistem modelleme ve simülasyon- MATLAB/Simulink d dt d dt z( t) 2 ( ) ( ) ( ) 2 n z t n z t Knu t % ikinci derece sistem % K = 1; zeta = 0.5; wn = 4 ;


19 Sistem modelleme ve simülasyon- MATLAB/Simulink


20 Sistem modelleme ve simülasyon- MATLAB/Simulink

21 Sistem modelleme ve simülasyon- MATLAB/Simulink Simulasyonlar iki şekilde gerçekleştirilebilir: 1- Başlangıç şartları girilerek 2- Dış girişler(adım,sinusodial, vb.) etkisinde
22 Sistem modelleme-trigonometrik denklemler Şekilde içten yanmalı bir motor için piston hareketi modellenecektir. Bu hareket bağlantı çubuğunun krankı döndürmesine sebep olur. Problemi açısını hesaplamaya gerek kalmadan farklı bir şekilde ele almak mümkündür. Burada krankın 500 d / d devir sayısındaki 2 devri için pistonun konumunu, hızını ve ivmesini hesaplayal ım. l l d 2 x h d r 1 r
23 Sistem modelleme-trigonometrik denklemler Şekilden d ve h mesafeleri aşağıdaki gibi hesaplanabilir. 1 d r cos, h r sin 1 Eğer h uzaklığı bilinirse d hesaplanabilir: 2 l d 2 d l h l r 2 sin x h d r 1
24 Sistem modelleme-trigonometrik denklemler Pistonun x konumu x d d r cos l r 1 2 sin Pistonun hızı : x rsin 2 r sin ( l r sin ) Pistonun ivmesi: 2 x r cos 4r cos 2 ( l r sin ) ( r sin 2 ) ( l r sin )
25 Sistem modelleme-trigonometrik denklemler clear all theta_dot=500; % rpm r=0.12; l=0.25; % m t_rev=2*pi/theta_dot; % Time for one revolution t=linspace(0,2*t_rev, 200); % time vector theta=theta_dot*t ; % calculate theta at each time. h=r*sin(theta); d2s=l^2-r^2*sin(theta).^2; %calculate d2 square d2=sqrt(d2s); x=r*cos(theta)+d2; % calculate x for each theta x_dot=-r*theta_dot*sin(theta)-(r^2*theta_dot*sin(2*theta)./(2*d2) ); x_dot_dot=-r*theta_dot^2*cos(theta)-(4*r^2*theta_dot^2*cos(2*theta).*... d2s+(r^2*sin(2*theta)*theta_dot).^2)./(4*d2s.^(3/2) ); subplot(2,2,1) plot(t,x) % plot Position vs t xlabel('time(s)') ylabel('position(m)') subplot(2,2,2) plot(t,x_dot) % plot Velocity vs t xlabel('time(s)') ylabel('velocity(m/s)') subplot(2,2,3) plot(t,x_dot_dot) % plot Acceleration vs t xlabel('time(s)') ylabel(' Acceleration(m/s^2)') subplot(2,2,4) plot(t,h) % plot h vs t xlabel('time(s)') ylabel('h (m)')
26 Sistem modelleme-trigonometrik denklemler Position(m) Acceleration(m/s 2 ) Velocity(m/s) h(m) Time(s) 5 x Time(s) Time(s) Time(s)
27 Sistem modelleme-trigonometrik denklemler 2 4r cos 2 ( l r sin ) ( r sin 2 ) x r cos ( l r sin ) Pistonun başlangıç değeri belli bir açısı için modele girilmelidir. x d d r cos l r sin
28 Sistem modelleme-termal denklemler Şekil elektrik ısıtıcısı ile ısıtılan bir odayı temsil etmektedir. Odanın içinin sıcaklığı sıcaklığının ortam sıcaklığı sıcaklığı T T modeli oluşturunuz. r w ve duvarların olduğu kabul edilmektedir. Eğer dış T ise, sağlanan ısı miktarı q ile oda o arasındaki ilişkiyi gösteren bir sistem T r
29 Sistem modelleme-termal denklemler Oda içinden duvarlara olan ısı akışı q rw T r T R r w Burada R r odanın termal direncidir. Benzer şekilde duvardan dışarıya olan ısı transferi q wo T w T R w o Burada R w duvarın termal direncidir. Isı denklemi aşağıdaki şekilde yazılabilir. dt r q qrw C1 dt
30 Sistem modelleme-termal denklemler Burada q ısıtıcıdan gelen ısı akışıdır. q T T dt C r w r 1 Rr dt Tr Tw C1T r q ( I) R r Benzer şekilde duvar ve dış ortam arasındaki ısı transferi dt T T T T dt qrw qwo C2 C dt R R d w r w w o w 2 r w t CT 2 w T r 1 1 Tw Rr R R T R r w w o (II)
31 Sistem modelleme-termal denklemler ( I ) ve ( II ) denklemleri durum uzayı şeklinde düzenlenirse: T T T q r r w C1Rr C1Rr C T T T T w r w o C2Rr C2Rr C2Rw C2Rw 1 1 C1Rr C1R T r r Tr Tw T w C2Rr C2Rr C2Rw 1 0 C 1 q 1 T 0 CR 2 w o
32 Wall Temperature degree C Room Temperature degree C Sistem modelleme-termal denklemler clear all; C1=0.5; C2=1.5; Rr=0.5; Rw=1.8; Tr=8; Tw=4; To=3; q=5; A=[-1/(C1*Rr) 1/(C1 * Rr) 1/(C2*Rr) -(1/(C2*Rr) + 1/(C2*Rw) )]; B=[1/C /(C2 * Rw)]; X=[Tr; Tw;]; dt=0.1; % step size t=0; % Initial time tsim=25; % Simulation time n=round(tsim-t)/dt; for i=1:n X1(i,:)=[X' t]; dx=a*x+b*[q; To]; X=X+dt*dX; t=t+dt; end subplot(2,1,1) plot(x1(:,3),x1(:,1) ) xlabel('time (sec.)') ylabel('room Temperature degree C') subplot(2,1,2) plot(x1(:,3),x1(:,2) ) xlabel('time (sec.)') ylabel('wall Temperature degree C') % Divides the graphics window into sub windows % Divides the graphics window into sub windows Time (sec.) Time (sec.)
33 ÖDEV T T T q r r w C1Rr C1Rr C T T T T w r w o C2Rr C2Rr C2Rw C2Rw Yukarıdaki denklemleri esas alarak Matlab/Simulink modelini oluşturunuz. (Başlangıç şartları Tr=8, Tw=4). Sistem parametreleri C1=0.5; C2=1.5; Rr=0.5; Rw=1.8; To=3;q=5; Not: Ödev hazırlanırken proje hazırlama mantığı içinde 1- Başlık, 2- Problemin anlatımı(denklemsel çıkartım vb.), 3- Model dosyasının ödev dosyası içinde gösterilmesi, 4-Sonuçların gösterilmesi ve yorumlanması şeklinde word dosyasında hazırlanmalıdır.
MAK 585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK 585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 15.2.2019 Ders Konusunda Bilgiler Temel Dinamik
MAK 585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 15.2.2019 Ders Konusunda Bilgiler Temel Dinamik
Sistem Dinamiği ve Simülasyon
 Sistem Dinamiği ve Simülasyon Yrd.Doç.Dr. Meral BAYRAKTAR Makine Teorisi Sistem Dinamiği ve Kontrol Anabilim Dalı 1 DERS DÜZEND ZENİ Ders Sorumlusu Ders Saati : Yrd.Doç.Dr. Meral Bayraktar : Persembe 14:00-16:00
Sistem Dinamiği ve Simülasyon Yrd.Doç.Dr. Meral BAYRAKTAR Makine Teorisi Sistem Dinamiği ve Kontrol Anabilim Dalı 1 DERS DÜZEND ZENİ Ders Sorumlusu Ders Saati : Yrd.Doç.Dr. Meral Bayraktar : Persembe 14:00-16:00
Sistem Dinamiği. Bölüm 1- Sistem Dinamiğine Giriş. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Sistem Dinamiğine Giriş Doç.Dr. Erhan AKDOĞAN Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil
Sistem Dinamiği - Sistem Dinamiğine Giriş Doç.Dr. Erhan AKDOĞAN Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 22.2.219 Serbestlik derecesi Bir sistemin serbestlik
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 22.2.219 Serbestlik derecesi Bir sistemin serbestlik
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 016-Güz Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 09.1.016 Rüzgar türbinleri Rüzgar
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 016-Güz Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 09.1.016 Rüzgar türbinleri Rüzgar
Diferensiyel denklemler sürekli sistemlerin hareketlerinin ifade edilmesinde kullanılan denklemlerdir.
 .. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
.. Diferensiyel Denklemler y f (x) de F ( x, y, y, y,...) 0 veya y f ( x, y, y,...) x ve y değişkenlerinin kendileri ve türevlerini içinde bulunduran denklemlerdir. (Türevler; "Bağımlı değişkenin değişiminin
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 016-Bahar Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr.04.016 Rüzgar türbinleri Rüzgar
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 016-Bahar Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr.04.016 Rüzgar türbinleri Rüzgar
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 2015-2016 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL 1 BÖLÜM VIII YAPI SİSTEMLERİNİN DİNAMİK DIŞ ETKİLERE GÖRE HESABI 2 Bu bölümün hazırlanmasında
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
Sistem Dinamiği. Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
Sistem Dinamiği Bölüm 3- Rijit Gövdeli Mekanik Sistemlerin Modellenmesi Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
Mekanik Titreşimler ve Kontrol
 Mekanik Titreşimler ve Kontrol Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 03.10.2018 Ders Ön şartları ve Yükümlülükleri Temel Dinamik MATLAB/Simulink bilgisine sahip olmak. Derse devam zorunluluğu yoktur.
Mekanik Titreşimler ve Kontrol Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 03.10.2018 Ders Ön şartları ve Yükümlülükleri Temel Dinamik MATLAB/Simulink bilgisine sahip olmak. Derse devam zorunluluğu yoktur.
Sistem Dinamiği. Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Mekanik Titreşimler ve Kontrolü. Makine Mühendisliği Bölümü
 Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
Mekanik Titreşimler ve Kontrolü Makine Mühendisliği Bölümü s.selim@gtu.edu.tr 10.10.018 Titreşim sinyalinin özellikleri Daimi sinyal Daimi olmayan sinyal Herhangi bir sistemden elde edilen titreşim sinyalinin
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
MAKİNE MÜHENDİSLİĞİ MÜFREDATI
 SINIF-DÖNEM : 1. Sınıf - Güz DERS KODU MATH 101 PHYS 101 CHEM 101 MCE 101 MCE 103 ENG 101 TDL 101 Matematik I Calculus I Z 4 0 6 Fizik I Physics I Z 3 2 6 Genel Kimya General Chemistry Z 3 0 5 Makina Mühendisliğine
SINIF-DÖNEM : 1. Sınıf - Güz DERS KODU MATH 101 PHYS 101 CHEM 101 MCE 101 MCE 103 ENG 101 TDL 101 Matematik I Calculus I Z 4 0 6 Fizik I Physics I Z 3 2 6 Genel Kimya General Chemistry Z 3 0 5 Makina Mühendisliğine
MATLAB a GİRİŞ. Doç. Dr. Mehmet İTİK. Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü
 MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
MATLAB a GİRİŞ Doç. Dr. Mehmet İTİK Karadeniz Teknik Üniversitesi Makine Mühendisliği Bölümü İçerik: MATLAB nedir? MATLAB arayüzü ve Bileşenleri (Toolbox) Değişkenler, Matris ve Vektörler Aritmetik işlemler
Şekil 1. DEÜ Test Asansörü kuyusu.
 DOKUZ EYLÜL ÜNĐVERSĐTESĐ TEST ASANSÖRÜ KUYUSUNUN DEPREM YÜKLERĐ ETKĐSĐ ALTINDAKĐ DĐNAMĐK DAVRANIŞININ ĐNCELENMESĐ Zeki Kıral ve Binnur Gören Kıral Dokuz Eylül Üniversitesi, Mühendislik Fakültesi, Makine
DOKUZ EYLÜL ÜNĐVERSĐTESĐ TEST ASANSÖRÜ KUYUSUNUN DEPREM YÜKLERĐ ETKĐSĐ ALTINDAKĐ DĐNAMĐK DAVRANIŞININ ĐNCELENMESĐ Zeki Kıral ve Binnur Gören Kıral Dokuz Eylül Üniversitesi, Mühendislik Fakültesi, Makine
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
Sistem Dinamiği. Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem
Sistem Dinamiği Bölüm 5-Blok Diyagramlar, Durum-Değişken Modelleri ve Simülasyon Metodları Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem
MATLAB/Simulink ile Sistem Modellemesine Giriş
 MATLAB/Simulink ile Sistem Modellemesine Giriş Seminer Notları 2017-2018 Güz Dönemi Arş. Gör. Abdurrahim Dal 1. GİRİŞ Günümüzde, mühendislik sistemlerinin benzetimlerinin (simülasyonlarının) önemi gün
MATLAB/Simulink ile Sistem Modellemesine Giriş Seminer Notları 2017-2018 Güz Dönemi Arş. Gör. Abdurrahim Dal 1. GİRİŞ Günümüzde, mühendislik sistemlerinin benzetimlerinin (simülasyonlarının) önemi gün
Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS. Process Control EEE423 7 3+2 4 5
 DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Process Control EEE423 7 3+2 4 5 Ön Koşul Dersleri Dersin Dili Dersin Seviyesi Dersin Türü İngilizce Lisans Seçmeli / Yüz Yüze Dersin
DERS BİLGİLERİ Ders Adı Kodu Yarıyılı T+U Saati Ulusal Kredisi AKTS Process Control EEE423 7 3+2 4 5 Ön Koşul Dersleri Dersin Dili Dersin Seviyesi Dersin Türü İngilizce Lisans Seçmeli / Yüz Yüze Dersin
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
Kimya Mühendisliğinde Uygulamalı Matematik
 Fen Bilimleri Enstitüsü Kimya Mühendisliği Anabilim Dalı Kimya Mühendisliğinde Uygulamalı Matematik DERS BİLGİ FORMU DERS BİLGİLERİ Dersin Adı Kodu Yarıyıl Kimya Mühendisliğinde Uygulamalı Matematik T
Fen Bilimleri Enstitüsü Kimya Mühendisliği Anabilim Dalı Kimya Mühendisliğinde Uygulamalı Matematik DERS BİLGİ FORMU DERS BİLGİLERİ Dersin Adı Kodu Yarıyıl Kimya Mühendisliğinde Uygulamalı Matematik T
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
ELASTİK DALGA YAYINIMI
 18.0.016 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (016-1. DERS 1 Zaman ve Yer Ders saati : 10:0 13:00 Ara : 11:15 11:30 Ders yeri : D-331 1 18.0.016 Sizden beklenen Derse devamın sağlanması çok
18.0.016 ELASTİK DALGA YAYINIMI Prof.Dr. Eşref YALÇINKAYA (016-1. DERS 1 Zaman ve Yer Ders saati : 10:0 13:00 Ara : 11:15 11:30 Ders yeri : D-331 1 18.0.016 Sizden beklenen Derse devamın sağlanması çok
MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ LİSANS EĞİTİM-ÖĞRETİM PLANI (NORMAL VE İKİNCİ ÖĞRETİM)
") MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ LİSANS EĞİTİM-ÖĞRETİM PLANI (NORMAL VE İKİNCİ ÖĞRETİM) I. YARIYIL MAK1001 Matematik I 4 2 6 MAK1003 Fizik I 3 1 5 MAK1005 Genel Kimya 2 1 4 MAK1007 Lineer Cebir 3 0 3 MAK1009
MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ LİSANS EĞİTİM-ÖĞRETİM PLANI (NORMAL VE İKİNCİ ÖĞRETİM) I. YARIYIL MAK1001 Matematik I 4 2 6 MAK1003 Fizik I 3 1 5 MAK1005 Genel Kimya 2 1 4 MAK1007 Lineer Cebir 3 0 3 MAK1009
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
KARARSIZ HAL ISI TRANSFERİ
 KM380 Kimya Mühendisliği Laboratuvarı I 005-006 Bahar Dönemi Arş.Gör. Zeynep ÖZAYDIN (Oda No: 504 Arş.Gör. Tuğba GÜMÜŞDERE (Fen Bilimleri Enstitüsü KARARSIZ HAL ISI TRANSFERİ Deney No : 5b AMAÇ İki ucu
KM380 Kimya Mühendisliği Laboratuvarı I 005-006 Bahar Dönemi Arş.Gör. Zeynep ÖZAYDIN (Oda No: 504 Arş.Gör. Tuğba GÜMÜŞDERE (Fen Bilimleri Enstitüsü KARARSIZ HAL ISI TRANSFERİ Deney No : 5b AMAÇ İki ucu
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
ĠSTANBUL BOĞAZINDAKĠ AKINTI ENERJĠSĠ YARDIMIYLA ELEKTRĠK ELDESĠ Onur TULGAS Prof.Dr. Ayşen DEMİRÖREN, Prof. Dr. Ömer GÖREN, Y.Doç.Dr.
 1. Giriş ĠSTANBUL BOĞAZINDAKĠ AKINTI ENERJĠSĠ YARDIMIYLA ELEKTRĠK ELDESĠ Onur TULGAS Prof.Dr. Ayşen DEMİRÖREN, Prof. Dr. Ömer GÖREN, Y.Doç.Dr.Özgür ÜSTÜN Dünyamızda gerçekleşen ve hızla ilerleyen teknolojik
1. Giriş ĠSTANBUL BOĞAZINDAKĠ AKINTI ENERJĠSĠ YARDIMIYLA ELEKTRĠK ELDESĠ Onur TULGAS Prof.Dr. Ayşen DEMİRÖREN, Prof. Dr. Ömer GÖREN, Y.Doç.Dr.Özgür ÜSTÜN Dünyamızda gerçekleşen ve hızla ilerleyen teknolojik
Süreç Modelleme, Dinamiği ve Kontrolü (CEAC 407) Ders Detayları
 Ders Detayları") Süreç Modelleme, Dinamiği ve Kontrolü (CEAC 407) Ders Detayları Ders Adı Süreç Modelleme, Dinamiği ve Kontrolü Ders Kodu CEAC 407 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Güz 3 1 0
Süreç Modelleme, Dinamiği ve Kontrolü (CEAC 407) Ders Detayları Ders Adı Süreç Modelleme, Dinamiği ve Kontrolü Ders Kodu CEAC 407 Dönemi Ders Uygulama Laboratuar Kredi AKTS Saati Saati Saati Güz 3 1 0
DİNAMİK - 1. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
DİNAMİK - 1 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 1. HAFTA Kapsam:
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
Elektrik Makinalarının Dinamiği (EE 553) Ders Detayları
 Ders Detayları") Elektrik Makinalarının Dinamiği (EE 553) Ders Detayları Ders Adı Ders Dönemi Ders Uygulama Laboratuar Kredi AKTS Kodu Saati Saati Saati Elektrik Makinalarının Dinamiği EE 553 Güz 3 0 0 3 7.5 Ön Koşul Ders(ler)i
Elektrik Makinalarının Dinamiği (EE 553) Ders Detayları Ders Adı Ders Dönemi Ders Uygulama Laboratuar Kredi AKTS Kodu Saati Saati Saati Elektrik Makinalarının Dinamiği EE 553 Güz 3 0 0 3 7.5 Ön Koşul Ders(ler)i
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM
 KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM M.Ali Akcayol Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü (Yüksek Lisans Tezinden Bir Bölüm) Şekil 1'
KLASİK BULANIK MANTIK DENETLEYİCİ PROBLEMİ : INVERTED PENDULUM M.Ali Akcayol Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Bilgisayar Mühendisliği Bölümü (Yüksek Lisans Tezinden Bir Bölüm) Şekil 1'
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
MAK 308 MAKİNA DİNAMİĞİ 017-018 Bahar Dr. Nurdan Bilgin EŞDEĞER ATALET MOMENTİ Geçen ders, hız ve ivme etki katsayılarını elde ederek; mekanizmanın hareketinin sadece bir bağımsız değişkene bağlı olarak
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
MAK 308 MAKİNA DİNAMİĞİ Bahar Dr. Nurdan Bilgin
 MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
MAK 308 MAKİNA DİNAMİĞİ 2017-2018 Bahar Dr. Nurdan Bilgin Virtüel İş Yöntemi-Giriş Bu zamana kadar Newton yasaları ve D alambert prensibine dayanarak hareket özellikleri her konumda bilinen bir makinanın
TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI
 Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK
 Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
Selçuk-Teknik Dergisi ISSN 130-6178 Journal of Selcuk-Technic Cilt, Sayı:-006 Volume, Number:-006 RCRCR KAVRAMA MEKANİZMASININ KİNEMATİK ANALİZİ Koray KAVLAK Selçuk Üniversitesi, Mühendislik-Mimarlık Fakültesi,
İçerik. TBT 1003 Temel Bilgi Teknolojileri
 TBT 1003 Temel Bilgi Teknolojileri İçerik H0. Giriş ve Ders İçeriği Tanıtım H1. Donanım ve bilgisayarlar. H2. Donanım uygulamaları ve işletim sistemleri. H3. Kelime İşlemciler H4. Kelime İşlemci Uygulama
TBT 1003 Temel Bilgi Teknolojileri İçerik H0. Giriş ve Ders İçeriği Tanıtım H1. Donanım ve bilgisayarlar. H2. Donanım uygulamaları ve işletim sistemleri. H3. Kelime İşlemciler H4. Kelime İşlemci Uygulama
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 11 1.3 TAŞITLARIN SINIFLANDIRILMASI... 14 1.4 TAŞITA ETKİYEN KUVVETLER... 15 1.5
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 11 1.3 TAŞITLARIN SINIFLANDIRILMASI... 14 1.4 TAŞITA ETKİYEN KUVVETLER... 15 1.5
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
HOMOGEN OLMAYAN DENKLEMLER
 n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
n. mertebeden homogen olmayan lineer bir diferansiyel denklemin y (n) + p 1 (x)y (n 1) + + p n 1 (x)y + p n (x)y = f(x) (1) şeklinde olduğunu ve bununla ilgili olan n. mertebeden lineer homogen denlemin
AKTİF SÜSPANSİYONLU ÇEYREK TAŞIT MODELİNİN İVME GERİBESLEMELİ KONTROLÜ
 AKTİF SÜSPANSİYONLU ÇEYREK TAŞIT MODELİNİN İVME GERİBESLEMELİ KONTROLÜ Hakan KÖYLÜ 1 H.Metin ERTUNÇ 1 Kocaeli Üniversitesi, Teknik Eğitim Fakültesi, Otomotiv Öğretmenliği, 41100 Kocaeli Kocaeli Üniversitesi,
AKTİF SÜSPANSİYONLU ÇEYREK TAŞIT MODELİNİN İVME GERİBESLEMELİ KONTROLÜ Hakan KÖYLÜ 1 H.Metin ERTUNÇ 1 Kocaeli Üniversitesi, Teknik Eğitim Fakültesi, Otomotiv Öğretmenliği, 41100 Kocaeli Kocaeli Üniversitesi,
Plazma İletiminin Optimal Kontrolü Üzerine
 Plazma İletiminin Optimal Kontrolü Üzerine 1 Yalçın Yılmaz, 2 İsmail Küçük ve 3 Faruk Uygul *1 Faculty of Arts and Sciences, Dept. of Mathematics, Sakaya University, Sakarya, Turkey 2 Faculty of Chemical
Plazma İletiminin Optimal Kontrolü Üzerine 1 Yalçın Yılmaz, 2 İsmail Küçük ve 3 Faruk Uygul *1 Faculty of Arts and Sciences, Dept. of Mathematics, Sakaya University, Sakarya, Turkey 2 Faculty of Chemical
2009 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / MAKİNE MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ. Ders Kodu Dersin Adı T P K ECTS Ders Tipi
 2009 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / MAKİNE MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ Aİ 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2 0 2 2 ZORUNLU MM 101 GENEL MATEMATİK-I 3 0 3 5 ZORUNLU MM 103 LİNEER
2009 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / MAKİNE MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ Aİ 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2 0 2 2 ZORUNLU MM 101 GENEL MATEMATİK-I 3 0 3 5 ZORUNLU MM 103 LİNEER
2016 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ (İÖ) EĞİTİM PLANI
 EĞİTİM PLANI") 2016 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ (İÖ) EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ ESAI 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2016 2 0 2 2 Z ESM 101 GENEL MATEMATİK-I 2016 3
2016 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ (İÖ) EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ ESAI 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2016 2 0 2 2 Z ESM 101 GENEL MATEMATİK-I 2016 3
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Fizik 101: Ders 23 Gündem
 Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
Fizik 101: Ders 3 Gündem Basit Harmonik Hereket Yatay yay ve kütle Sinus ve cosinus lerin anlamı Düşey yay ve kütle Enerji yaklaşımı Basit sarkaç Çubuk sarkaç Basit Harmonik Hareket (BHH) Ucunda bir kütle
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2015 %25 V1 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI 1. SINIFTAN İTİBAREN) Açıklama:
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2015 %25 V1 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI 1. SINIFTAN İTİBAREN) Açıklama:
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu
 MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 2016-Bahar Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 15.04.2016 Maglev Taşıma Araçları
MAK585 Dinamik Sistemlerin Modellenmesi ve Simülasyonu 2016-Bahar Dönemi Gebze Teknik Üniversitesi Makine Mühendisliği Bölümü Prof.Dr. Selim Sivrioğlu s.selim@gtu.edu.tr 15.04.2016 Maglev Taşıma Araçları
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI MÜHENDİSLİK MODELLEMESİ RAPOR 21.05.2015 Eren SOYLU 100105045 ernsoylu@gmail.com İsa Yavuz Gündoğdu 100105008
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DİNAMİK DERS UYGULAMALARI BAUN MAKİNA MÜHENDİSLİĞİ ARALIK-2018-FİNAL ÖNCESİ
 DİNAMİK DERS UYGULAMALARI BAUN MAKİNA MÜHENDİSLİĞİ ARALIK-2018-FİNAL ÖNCESİ UYGULAMA-1 2 m/s hızla hareket eden tren a=(60v- 4 ) m/s 2 ivme ile hızlanmaktadır. 3 s sonraki hız ve konumunu hesaplayınız.
DİNAMİK DERS UYGULAMALARI BAUN MAKİNA MÜHENDİSLİĞİ ARALIK-2018-FİNAL ÖNCESİ UYGULAMA-1 2 m/s hızla hareket eden tren a=(60v- 4 ) m/s 2 ivme ile hızlanmaktadır. 3 s sonraki hız ve konumunu hesaplayınız.
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
ÜÇ ÇUBUK MEKANİZMASI ÖRNEĞİ
 ÜÇ ÇUBUK MEKANİZMASI ÖRNEĞİ Şekil 1: Üç çubuk mekanizması Şekil 1 de görülen üç çubuk mekanizmasının Adams programı yardımıyla çözeceğiz. Adams programının başlatılması. Şekil 2: Adams programının başlatılması
ÜÇ ÇUBUK MEKANİZMASI ÖRNEĞİ Şekil 1: Üç çubuk mekanizması Şekil 1 de görülen üç çubuk mekanizmasının Adams programı yardımıyla çözeceğiz. Adams programının başlatılması. Şekil 2: Adams programının başlatılması
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
SAYISAL ÇÖZÜMLEME Yrd. Doç. Dr. Adnan SONDAŞ Sayısal Çözümleme
 SAYISAL ÇÖZÜMLEME Yrd. Doç. Dr. Adnan SONDAŞ asondas@kocaeli.edu.tr 0262-303 22 58 1 SAYISAL ÇÖZÜMLEME 1. Hafta SAYISAL ANALİZE GİRİŞ 2 AMAÇ Mühendislik problemlerinin çözüm aşamasında kullanılan sayısal
SAYISAL ÇÖZÜMLEME Yrd. Doç. Dr. Adnan SONDAŞ asondas@kocaeli.edu.tr 0262-303 22 58 1 SAYISAL ÇÖZÜMLEME 1. Hafta SAYISAL ANALİZE GİRİŞ 2 AMAÇ Mühendislik problemlerinin çözüm aşamasında kullanılan sayısal
Algoritmalar ve Programlama. DERS - 4 Yrd. Doç. Dr. Ahmet SERBES
 Algoritmalar ve Programlama DERS - 4 Yrd. Doç. Dr. Ahmet SERBES Geçen Derste Değişken oluşturma Skaler Diziler, vektörler Matrisler Aritmetik işlemler Bazı fonksiyonların kullanımı Operatörler İlk değer
Algoritmalar ve Programlama DERS - 4 Yrd. Doç. Dr. Ahmet SERBES Geçen Derste Değişken oluşturma Skaler Diziler, vektörler Matrisler Aritmetik işlemler Bazı fonksiyonların kullanımı Operatörler İlk değer
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 1- GİRİŞ Doç. Dr. Ali Rıza YILDIZ 1 Mühendislikte, herhangi bir fiziksel sistemin matematiksel modellenmesi sonucu elde edilen karmaşık veya analitik çözülemeyen denklemlerin
MAK 210 SAYISAL ANALİZ BÖLÜM 1- GİRİŞ Doç. Dr. Ali Rıza YILDIZ 1 Mühendislikte, herhangi bir fiziksel sistemin matematiksel modellenmesi sonucu elde edilen karmaşık veya analitik çözülemeyen denklemlerin
Hazırlık Sınıfı. 1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V3 DERS PLANI (2014-2015 EĞİTİM-ÖĞRETİM YILINDAN İTİBAREN) Hazırlık Sınıfı
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V3 DERS PLANI (2014-2015 EĞİTİM-ÖĞRETİM YILINDAN İTİBAREN) Hazırlık Sınıfı
DERS BİLGİLERİ. Ders Kodu Yarıyıl D+U+L Saat Kredi AKTS. İleri Sayısal Kontrol Sistemleri EE 586 Güz Doç. Dr. Duygun Erol Barkana
 DERS BİLGİLERİ Ders Kodu Yarıyıl D+U+L Saat Kredi AKTS İleri Sayısal Kontrol Sistemleri EE 586 Güz 3+0+0 3 10 Ön Koşul Dersleri Yok Dersin Dili İngilizce Dersin Seviyesi Yüksek Lisans Dersin Türü Seçmeli
DERS BİLGİLERİ Ders Kodu Yarıyıl D+U+L Saat Kredi AKTS İleri Sayısal Kontrol Sistemleri EE 586 Güz 3+0+0 3 10 Ön Koşul Dersleri Yok Dersin Dili İngilizce Dersin Seviyesi Yüksek Lisans Dersin Türü Seçmeli
İNM 208 DERS TANITIM
 SAKARYA ÜNİVERSİTESİ MF İNŞAAT MÜHENDİSLİĞİ BÖLÜMÜ Department of Civil Engineering İNM 208 YAPI STATIĞI II İNM 208 DERS TANITIM Y.Doç.Dr. Mustafa KUTANİS DR.MUSTAFA KUTANİS SLIDE 1 ADRES INM 208 YAPI STATİĞİ
SAKARYA ÜNİVERSİTESİ MF İNŞAAT MÜHENDİSLİĞİ BÖLÜMÜ Department of Civil Engineering İNM 208 YAPI STATIĞI II İNM 208 DERS TANITIM Y.Doç.Dr. Mustafa KUTANİS DR.MUSTAFA KUTANİS SLIDE 1 ADRES INM 208 YAPI STATİĞİ
Okut. Yüksel YURTAY. İletişim : (264) Sayısal Analiz. Giriş.
 Sayısal Analiz. Giriş.") Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
Okut. Yüksel YURTAY İletişim : Sayısal Analiz yyurtay@sakarya.edu.tr www.cs.sakarya.edu.tr/yyurtay (264) 295 58 99 Giriş 1 Amaç : Mühendislik problemlerinin bilgisayar ortamında çözümünü mümkün kılacak
MAK209 DİNAMİK ÖDEV 1 ÇÖZÜMÜ Dr. Nurdan Bilgin
 MAK09 DİNAMİK ÖDEV 1 ÇÖZÜMÜ Dr. Nurdan Bilgin SORULAR ve ÇÖZÜMLER Soru 1: Küçük çelik toplar durgun durumdayken sırayla 100 m yüksekliğindeki A açıklığından sırayla iki saniyede bir düşüyorlar. a.) Artarda
MAK09 DİNAMİK ÖDEV 1 ÇÖZÜMÜ Dr. Nurdan Bilgin SORULAR ve ÇÖZÜMLER Soru 1: Küçük çelik toplar durgun durumdayken sırayla 100 m yüksekliğindeki A açıklığından sırayla iki saniyede bir düşüyorlar. a.) Artarda
DC Beslemeli Raylı Ulaşım Sistemlerinin Simülasyonu
 DC Beslemeli Raylı Ulaşım Sistemlerinin Simülasyonu M. Turan SÖYLEMEZ İstanbul Teknik Üniversitesi Elektrik Müh. Bölümü Süleyman Açıkbaş İstanbul Ulaşım A.Ş. Plan Giriş - Neden Raylı Sistem Simülasyonu?
DC Beslemeli Raylı Ulaşım Sistemlerinin Simülasyonu M. Turan SÖYLEMEZ İstanbul Teknik Üniversitesi Elektrik Müh. Bölümü Süleyman Açıkbaş İstanbul Ulaşım A.Ş. Plan Giriş - Neden Raylı Sistem Simülasyonu?
Hazırlık Sınıfı. 1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V2 DERS PLANI (2013-2014 EĞİTİM-ÖĞRETİM YILINDAN İTİBAREN) Hazırlık Sınıfı
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V2 DERS PLANI (2013-2014 EĞİTİM-ÖĞRETİM YILINDAN İTİBAREN) Hazırlık Sınıfı
MAK 4004 BİTİRME ÖDEVİ DERSİ PROJE ÖNERİSİ
 - ULUDAĞ ÜNİVERSİTESİ Form BTP-01 (1/) BAHAR 007-008 4/01/008 Taşıt Hareket Denklemlerinin Bilgisayar Yardımıyla Çözümü 1. Taşıta etkiyen kuvvetlerin belirlenmesi. Düz harekette taşıt hareket denklemlerinin
- ULUDAĞ ÜNİVERSİTESİ Form BTP-01 (1/) BAHAR 007-008 4/01/008 Taşıt Hareket Denklemlerinin Bilgisayar Yardımıyla Çözümü 1. Taşıta etkiyen kuvvetlerin belirlenmesi. Düz harekette taşıt hareket denklemlerinin
MEKANİK TİTREŞİMLER ve İZOLASYONU (Teorik Açıklamalar ve Uygulamalar)
") T.C. CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER ve İZOLASYONU (Teorik Açıklamalar ve Uygulamalar) PROF. NECATİ TAHRALI YTÜ Makine Mühendisliği Bölümü
T.C. CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MEKANİK TİTREŞİMLER ve İZOLASYONU (Teorik Açıklamalar ve Uygulamalar) PROF. NECATİ TAHRALI YTÜ Makine Mühendisliği Bölümü
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V4 DERS PLANI (2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN) 1.Sınıf / Güz
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V4 DERS PLANI (2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN) 1.Sınıf / Güz
1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. 2) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek.
 Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. 2) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek.") DENEY 4. BASİT SARKAÇ Amaç: 1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. ) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek. Kuramsal Bili: Kendini belirli zaman
DENEY 4. BASİT SARKAÇ Amaç: 1) Bir sarkacın hareketini deneysel olarak incelemek ve teori ile karşılaştırmak. ) Basit sarkaç yardımıyla yerçekimi ivmesini belirlemek. Kuramsal Bili: Kendini belirli zaman
KAM MEKANİZMASI İÇEREN KANCA TAHRİK MEKANİZMALARININ KİNEMATİK TASARIMI VE KANCA HAREKET EĞRİSİNİN ANALİZİ
 PAMUKKALE ÜNİ VERSİ TESİ MÜHENDİ SLİ K FAKÜLTESİ PAMUKKALE UNIVERSITY ENGINEERING COLLEGE MÜHENDİ SLİ K BİLİMLERİ DERGİ S İ JOURNAL OF ENGINEERING SCIENCES YIL CİLT SAYI SAYFA : 003 : 9 : : 53-6 KAM MEKANİZMASI
PAMUKKALE ÜNİ VERSİ TESİ MÜHENDİ SLİ K FAKÜLTESİ PAMUKKALE UNIVERSITY ENGINEERING COLLEGE MÜHENDİ SLİ K BİLİMLERİ DERGİ S İ JOURNAL OF ENGINEERING SCIENCES YIL CİLT SAYI SAYFA : 003 : 9 : : 53-6 KAM MEKANİZMASI
Diferensiyel Denklemler I Uygulama Notları
 2004 Diferensiyel Denklemler I Uygulama Notları Mustafa Özdemir İçindekiler Temel Bilgiler...................................................................... 2 Tam Diferensiyel Denklemler........................................................4
2004 Diferensiyel Denklemler I Uygulama Notları Mustafa Özdemir İçindekiler Temel Bilgiler...................................................................... 2 Tam Diferensiyel Denklemler........................................................4
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V5 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI İKİNCİ ve ÜST SINIFLAR) Açıklama:
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V5 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI İKİNCİ ve ÜST SINIFLAR) Açıklama:
Şekil 7.1 Bir tankta sıvı birikimi
 6 7. DİFERENSİYEL DENKLEMLERİN SAYISAL ÇÖZÜMLERİ Diferensiyel denklemlerin sayısal integrasyonunda kullanılabilecek bir çok yöntem vardır. Tecrübeler dördüncü mertebe (Runge-Kutta) yönteminin hemen hemen
6 7. DİFERENSİYEL DENKLEMLERİN SAYISAL ÇÖZÜMLERİ Diferensiyel denklemlerin sayısal integrasyonunda kullanılabilecek bir çok yöntem vardır. Tecrübeler dördüncü mertebe (Runge-Kutta) yönteminin hemen hemen
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
ZENİ. : Yrd.Doç.Dr. Meral Bayraktar. : :
 Yrd. Doç.. Dr. Meral Bayraktar mbarut@yildiz.edu.tr www.yildiz.edu.tr/~mbarut 1 DERS DÜZEND ZENİ Ders Yurutucusu Ders Saati : Yrd.Doç.Dr. Meral Bayraktar : Carsamba 09:00-11:00 (G1) : Persembe 16:00-18:00
Yrd. Doç.. Dr. Meral Bayraktar mbarut@yildiz.edu.tr www.yildiz.edu.tr/~mbarut 1 DERS DÜZEND ZENİ Ders Yurutucusu Ders Saati : Yrd.Doç.Dr. Meral Bayraktar : Carsamba 09:00-11:00 (G1) : Persembe 16:00-18:00
fonksiyonunun [-1,1] arasındaki grafiği hesaba katılırsa bulunan sonucun
![fonksiyonunun [-1,1] arasındaki grafiği hesaba katılırsa bulunan sonucun](/thumbs/31/15329792.jpg "fonksiyonunun [-1,1] arasındaki grafiği hesaba katılırsa bulunan sonucun") . UŞAK FEN EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ ANALİZ II FİNAL SORULARI ÇÖZÜMLERİ d belirli integralinin aşağıdaki çözümünün doğru olup olmadığını belirtiniz. Eğer çözüm yanlış ise sebebini açıklayınız.
. UŞAK FEN EDEBİYAT FAKÜLTESİ MATEMATİK BÖLÜMÜ ANALİZ II FİNAL SORULARI ÇÖZÜMLERİ d belirli integralinin aşağıdaki çözümünün doğru olup olmadığını belirtiniz. Eğer çözüm yanlış ise sebebini açıklayınız.
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN 1.Sınıf / Güz Dönemi FIZ-137 KIM-607 Fizik
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN 1.Sınıf / Güz Dönemi FIZ-137 KIM-607 Fizik