Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı
|
|
|
- Direnç Akkaya
- 8 yıl önce
- İzleme sayısı:
Transkript

1 Sayısal Kontrol - HAVA HARP OKULU Bölüm 4 Sayısal Kontrolör Tasarımı İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi / 72

2 Bu bölümde aşağıdaki konular incelenecektir: Tasarım Yöntemlerine genel bir bakış Anten Kontrol Sistemi Kontrol Sistemlerinde kararlı hal hataları Geçici Rejim Yanıtı ve Spesifikasyonlar Bozucu Bastırma Problemi s düzleminde Tasarım z düzleminde Tasarım Tasarım Sürecinde MATLAB Tasarım Örnekleri PI, PD ve PID Tipi Sayısal Kontrolörler 2 / 72

3 Giriş Bu bölümde dönüşüm metotları kullanarak sayısal kontrolör tasarımı problemine eğileceğiz. Kontrolörlerin amacı, kabul edilmeyen davranışı kabul edilebilir kılmaktır. Genel bir kontrol sisteminde aşağıdaki performans ve kararlılık gereksinimlerinin bazıları yada tamamı bulunabilir: Kapalı Çevrim Kararlılık Kararlı Hal Doğruluğu Kabul Edilebilir bir Geçici Rejim Yanıtı Bozucu Bastırma Yeteneği Kontrol Kazanç Kısıtlarına Uyma (Doyum ve Eyleyici Hızları gibi) (Özellikle ADC ve DAC lerde önem arz eder.) Parametre Değişimlerine Karşı Düşük Hassasiyet 3 / 72

4 Yöntem ve Kapsam Kutup atama tasarımı (Pole Placement Design) yöntemi kullanılacaktır. Tasarımcı sistemden beklenen gereksinimleri yerine getirecek kutupları belirler ve kapalı çevrimin kutuplarının bu belirlenen noktalara gelmesi için kontrolörü tasarlar. Neden Kutup Atama Tasarımı s-düzlemi ile z-düzleminde tasarım hemen hemen aynı şekildedir. Bu nedenle alışık olduğumuz s-düzlemi teknikleri aynen z-düzlemi için de geçerlidir. Diğer taraftan frekans bölgesi tasarım yöntemleri sürekli zaman ile ayrık zamanda oldukça farklıdır. Bu nedenle, bu derste bu konuya girilmeyecektir. 4 / 72

5 Tasarım Yöntemlerinin Karşılaştırılması Kutup Atama Tasarımı s du zleminde Tasarım Dog rudan z du zleminde Tasarım s du zlemi metotları ile tasarım yapılır Bu yo ntemde proses ayrıklas tırılır Gc (s) Gc (z) d o nu s u mu uygulanır Kesin Sonuc Sag lar ADC modelleme dıs ı bırakılır O rnekleme yeterince hızlı olmalıdır 5 / 72

 açısının kontrolü problemi ile ilgilenelim: 6")
6 Sistem Spesifikasyonları (Örnek Sistem) Büyük bir antenin yatay (azimut) açısının kontrolü problemi ile ilgilenelim: 6 / 72

7 Sistem Spesifikasyonları (Örnek Sistem) Sistemde yer alan anten ve motor sistemi bir bütün olarak şu şekilde dinamik modele sahip olsun: J θ + B θ = T + Tw Burada θ = Anten Açısı (Kontrol Edilen Değişken) J = Tüm döner cisimlerin toplam eğlemsizliği B = Toplam viskoz sürtünmesi T = Motor Torku Tw = Rüzgar kuvveti (bozucu) 7 / 72

8 Sistem Blok Diyagramı Tw T Js B 8 / 72 θ 1 s θ

9 J θ + B θ = T + Tw denkleminin her iki tarafını B sabitine bölelim. Tw T J + θ + θ = B B B J/B sistemin zaman sabitidir. Kolaylık olması amacı ile zaman sabiti J/B = 10san olsun. Ayrıca u, T, B w, Tw, B Bu durumda sisteme ait dinamik denklem: 10θ + θ = u + Tw 9 / 72 y,θ

10 Sistem Blok Diyagramı w u s 1 s Sisteme ait transfer fonksiyonları: Y (s) = = U(s) s(10s + 1) s(s + 0.1) Y (s) 0.1 = W (s) s(s + 0.1) 10 / 72 y
 Y (s) 0.1 = W (s) s(s + 0.")
11 Kapalı Çevrim Kontrol Sistemi Amaç Kontrolör referans anten pozisyonunu (θr ) giriş kabul edecek ve uygun şekilde motor momenti T yi ayarlayarak referans izleme hatasını (e = θr θ) istenilen özellikleri sağlayacak şekilde en aza indirmeye çalışacaktır. W R + + E 11 / 72 D(z) U + G(z) Y

12 Kontrol Sisteminden Beklenenler - Kararlı Hal Doğruluğu Kararlı Hal Hata Değeri Beklentisi θr = 0.01t (34 /dak) şeklinde değişen bir referans işaret altında kararlı hal hatasının θr θ < 0.01rad olması istenmektedir. KHH ları Neden Oluşur? Referans İşarette ve bozucuda oluşan değişimler Kontrol Sistemlerinde KHH yı ne belirler? Tip-0 Sistemler Referans sabit bir giriş ise çıkış sabit bir hata oluşturur. Tip-1 Sistemler Referans sabit ise 0 hata; referans rampa ise sonlu hata Tip-2 SistemlerReferans sabit veya rampa ise 0 hata; referans parabolik ise sonlu hata 12 / 72

13 Kararlı Hal Hatası W R + + E D(z) U + G(z) E (z) = R(z) G (z)d(z)e (z) E (z) = 13 / 72 R(z) 1 + G (z)d(z) Y
 1 + G")
14 KHH... Giriş : Basamak Tipi Fonksiyon R(z) = r0 z r0 z 1 = E (z) = z 1 z G (z)d(z) r0 z 1 r0 z = lim z 1 z G (z)d(z) z G (z)d(z) r0 r0 e( ) =,, Kp : Pozisyon hata sabiti 1 + G (1)D(1) 1 + Kp e( ) = lim (z 1) 1. Tip-0 G (z)d(z) nin z = 1 de kutbu yok. Kp sonlu = e( ) 6= 0 2. Tip-1 G (z)d(z) nin z = 1 de 1 kutbu var. Kp = = e( ) = 0 3. Tip-2 G (z)d(z) nin z = 1 de 2 kutbu var. Kp = = e( ) = 0 14 / 72
d(z) nin z = 1 de 1 kutbu var. Kp = = e( ) = 0 3. Tip-2 G (z)d(z) nin z = 1 de 2 kutbu var.")
15 KHH... Giriş : Rampa Tipi Fonksiyon R(z) = 1 v0 Tz v0 Tz = E (z) = 2 2 (z 1) (z 1) 1 + G (z)d(z) e( ) = lim (z 1) z 1 0 Tz (z 1)2 1 v0 Tz = lim 1 + G (z)d(z) z 1 (z 1)(1 + G (z)d(z)) v0 Tz v0,, z 1 (z 1)(1 + G (z)d(z)) Kv e( ) = lim Kv : Hız hata sabiti (z 1)(1 + G (z)d(z)) (z 1)G (z)d(z) = lim z 1 z 1 Tz Tz Kv = lim 15 / 72
(1 + G (z)d(z)) (z 1)G (z)d(z) = lim z 1 z 1 Tz Tz Kv = lim 15 /")
16 KHH... Giriş : Rampa Tipi Fonksiyon 1. Tip-0 G (z)d(z) nin z = 1 de kutbu yok. Kv = 0 = e( ) = 2. Tip-1 G (z)d(z) nin z = 1 de 1 kutbu var. Kv 6= 0 = e( ) sonlu 3. Tip-2 G (z)d(z) nin z = 1 de 2 kutbu var. Kv = = e( ) = 0 İvme Hatası Benzer bir uygulama parabolik girişler içinde yapılabilir. e( ) = a0 Ka Ka = 1 lim (z 1)2 G (z)d(z) T 2 z 1 Ancak parabolik girişleri takip eden bir kontrolör yapmak çok çok zordur 16 / 72 ve nadir uygulamalardandır.
 = a0 Ka Ka = 1 lim (z 1)2 G (z)d(z) T 2 z 1 Ancak parabolik girişleri takip eden bir kontrolör yapmak çok")
17 KHH... Problemimizde v0 = 0.01 olduğundan e( ) 0.01 olabilmesi için Kv 1 olmalıdır. Hatırlatma: Sürekli Zaman Sistemlerde KHH Kp = lim G (s)d(s) = G (0)D(0) s 0 Kv = lim sg (s)d(s) s 0 Ka = lim s 2 G (s)d(s) s 0 17 / 72
d(s) = G (0)D(0) s 0 Kv = lim sg (s)d(s) s 0 Ka =")
18 Geçici Rejim Yanıtı AMAÇ Amaç iyi bir dinamik hata yanıtı elde etmektir. Geçici rejim spesifikasyonları zaman tanım bölgesinde yada frekans tanım bölgesinde verilebilir. Biz bu derste zaman tanım bölgesi kriterlerine odaklanacağız. Spesifikasyonlar Basamak yanıtı üzerinden: 1. Yüzde Aşım Miktarı 2. Yükselme Zamanı 3. Yerleşme Zamanı 18 / 72

19 Ele Alacağımız Sistem ve Spesifikasyonlar Tipik bir 2. Mertebeden Sistem ωn2 s 2 + 2ζωn + ωn2 Örneğin ζ = 0.5 ve ωn = 1 için basamak cevabı: 19 / 72

20 Tipik bir 2. Mertebeden Sistem 20 / 72
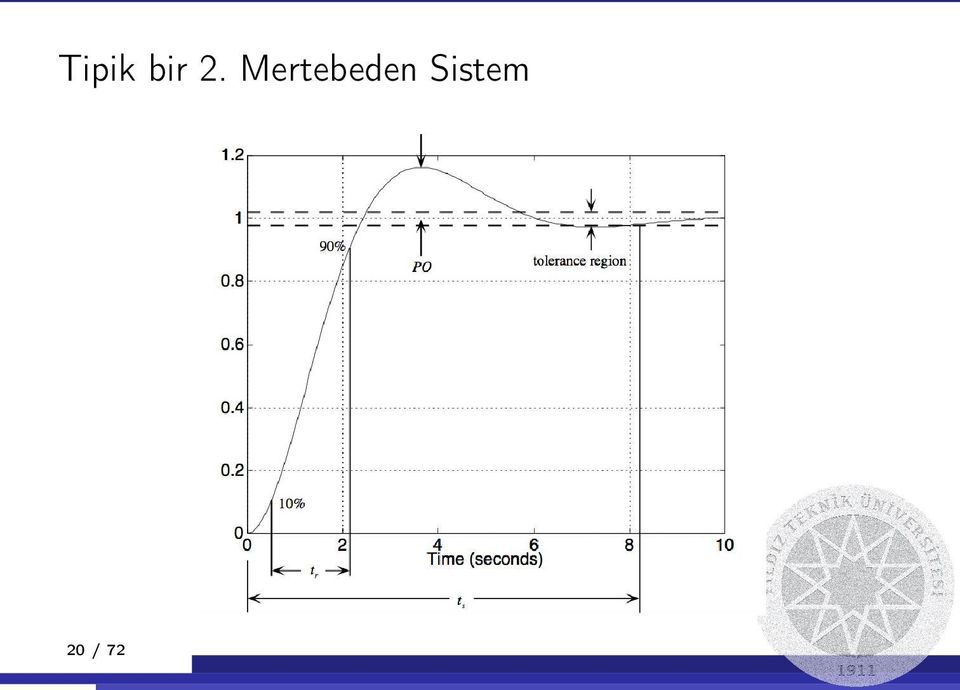
21 Kriterler Yüzde Aşım Miktarı Sadece sönüm oranına bağlıdır. 2 PO = e ζπ/ 1 ζ 100 ζ PO Tasarımda ise genellikle verilen bir PO için ζ aranır!!! Aşımın belli bir PO değerinden küçük olmasını sağlayacak ζ değeri: PO ζ / 72
22 Kriterler Yükselme Zamanı, tr Değeri analitik olarak tam belirlenemez. Ancak ωn den etkilenir. tr 1.8 ωn Not Bu yaklaşıklık ζ = 0.5 civarında gerçeğe çok yakındır. verilen bir tr yi garanti eden ωn : ωn 22 / tr
23 Kriterler Yerleşme Zamanı (ts ), ζωn den etkilenir! 2. Mertebeden bir sistemin birim basamak cevabı y (t) = 1 e ζωn t cos(ωd t + φ) p şeklinde ifade edilir. Burada ωd = ωn 1 ζ 2 sönümlü osilasyon frekansını ifade eder. Hatayı belirleyen terim sinüsoidin zarfıdır. Yani e ζωn t ts süre sonra hatanın %1 den küçük olmasını istersek: e ζωn ts 0.01 sağlanmalıdır. Tasarım esnasında ts verildiğinde: 23 / 72 ζωn 4.6 ts
24 Zaman Tanım Bölgesi Kriterleri sabit ζ as ımı belirler sabit ζωn Yerles me Zamanını belirler sabit ωn Yu kselme Zamanı 24 / 72
25 Örneğimize Geri Dönelim (Anten Kontrol Sistemi) Sistemden Beklentiler: 1. PO %15 = ζ > tr 6san. = ωn = ts 20san. = ζωn / 72
26 Tasarım (Anten Kontrol Sistemi) sabit ζ as ımı belirler sabit ζωn Yerles me Zamanını belirler sabit ωn Yu kselme Zamanı 26 / 72
27 s düzlemi bölgeleri = z düzlemi bölgeleri Dönüşüm z = e st Sabit Sönüm Oranı = Logaritmik Spiral Eğriler Sabit Doğal Frekans ωn = z = 1 e yakn bölgelerde neredeyse daireler ancak ωn büyüdükçe bozulmalar... Sabit ζωn = Sabit yarı çaplı dairesel bölgeler 27 / 72
28 Kriterlerin z düzlemi karşılığı T = 1 saniye 28 / 72
29 Bozucu Bastırma Problemi R(z) = 0 kabul ederek, W (z) nin takip hatası E (z) üzerindeki etkisine bakalım: G (z) E (z) = W (z) 1 + G (z)d(z) D(z)G (z) 1 kabul edilirse E (z) 1 W (z) D(z) Not: Kontrolör genliği yüksek seçilerek başarılı bir bozucu bastırımı sağlanabilir. 29 / 72
30 Anten Kontrol Sistemi Doğrudan s düzleminde tasarım: Sistem transfer fonksiyonu 0.1 şeklindedir. Sistemde yer alan örnekleyiciyi dikkate G (s) = s(s+0.1) almazsak: K (s + 0.1) D(s) = s seçersek gerekli kriterler sağlanır. 30 / 72
31 Tasarım: ωn = 0.46, ζ = 0.5 seçimi ile... s=tf( s ); G=0.1/(s*(s+0.1)) D=(s+0.1)/(s+0.5); rlocus(gd); sgrid(0.5,0.46) K = / 72
32 Tasarım (s + 0.1) s Kapalı çevrim sistem s tanım bölgesinde: D(s) = Y (s) = 2 R(s) s + 0.5s elde edilir. Kapalı çevrim için: ζ = 0.53, 32 / 72 ωn = 0.48
33 Simülasyon Sonuçları (Sürekli Zaman Kontrolör ile...) 33 / 72
34 Kontrollü sistemin kararlı hal hatasını inceleyelim: Kv = lim sg (s)d(s) = s = KHH beklentisi için Kv > 1 olmalıdır. Ancak Kv = 0.45 yetersizdir. Tasarımın tekrar gözden geçirilmesi gerekir. Not: D(s) kontrolörünün ayrık karşılığının performansını inceleyelim. Öncelikle örnekleme periyodu T nin belirlenmesi gerekir. Sistemin doğal frekansı ωn = = 0.48rad/sn dir. Başarılı bir performans için örnekleme frekansı bu değerin yaklaşık altı katında seçilirse fs = 0.5Hz, T = 2san elde edilir. Yamuk Entegrasyon ile D(z) = 34 / (z ) z
35 Sistemin ayrık modeli ise Sıfırıncı Mertebeden Tutucu(ZOH) ve T = 2 ile: G (s) 1 G (z) = (1 z )Z s (z ) = (z 1)(z ) Kapalı çevrim transfer fonksiyonu da Y (z) G (z)d(z) (z ) = = 2 R(z) 1 + G (z)d(z) z z / 72
36 Doğrudan Z Düzleminde Tasarım: Sistemin ayrıklaştırılmış modeli kullanılarak kontrolör tasarımı yapılacaktır. Ancak burada öncelikle bir oransal kontrolörle başlayacağız ve gerekli görürsek dinamik kontrolör kullanacağız. R(z) + 36 / 72 K G(z) Y (z)
37 Oransal kontrolle kapalı çevrim sistem: Y (z) KG (z) = R(z) 1 + KG (z) Burada: G (s) G (z) = (1 z )Z s (z ) = (z 1)(z ) 1 şeklindedir. 37 / 72
38 K Kontrolörü için KYE, Koşullar Sağlanmıyor Root Locus Imaginary Axis / Real Axis
39 Kök Yer Eğrisinin yeniden yapılandırılması gerekir. Bunun için KYE yi sola kaydırılmalı Sıfırlar KYE yi kendisine çeker, Kutuplar iter Bunun için z = noktasındaki kutbu ortadan kaldırmak gerekir. = z = noktasında bir kontrolör sıfırı KYE nin reel eksenden ayrılma noktasını sola çekmeliyiz. = Orjine yakın bir kontrolör kutbu = z = 0.05 noktasında bir kontrol kutbu D(z) = K (z ) z 0.05 işimizi görebilir... (Test Edilmeli!) 39 / 72
40 Kök Yer Eğrisi Çizilirse Root Locus System: GD Gain: 1.51 Pole: i Damping: Overshoot (%): 11 Frequency (rad/s): Imaginary Axis / Real Axis
41 Bu durumda kontrolör: D(z) = 1.51(z ) z 0.05 Kapalı Çevrim Sistem TF: D(z)G (z) Y (z) = R(z) 1 + D(z)G (z) (z ) = (z 1)(z 0.05) (z ) 41 / 72
42 Basamak Cevabı: Step Response Amplitude / Time (seconds)
43 Tasarım Sürecinde MATLAB Ts=2 % Ornekleme Periyodu (Saniye) wn=0.46 % Doğal Frekans (rad/san) zeta=0.5 % İstenilen Sönüm Oranı s=tf( s ); G=0.1/(s*(s+0.1)); % Sürekli Zaman Sistem Gd=c2d(G,Ts, zoh ); % Ayrik sistem modelinin elde edilmesi Gd_sys=zpk(Gd); %Kazanç, Kutup ve Sıfırlara Ayrıştırma rlocus(gd_sys); hold on zgrid(zeta,wn*ts); % Sistem Spesifikasyonlari axis([ ]); % Ilgili bölgeye odaklanma 43 / 72
44 Tasarım Sürecinde MATLAB... z=tf( z, Ts); % z degiskeninin tanımlanması D=1.51*(z )/(z-0.05) % Kontrolör LG=D*Gd; % Açık Çevrim Kazancı LG=minreal(LG); % Sıfır-Kutup Silme (gerekiyorsa yapılsın!) rlocus(lg) % Kontrollü sistemin kök yer eğrisi hold on zgrid(zeta,wn*ts); % Sistem Spesifikasyonların Gösterimi axis([ ]); % İlgili bölgeye odaklanma Gcl=LG/(1+LG); % Kapalı Çevrim TF Gcl=minreal(Gcl); % Kutup-Sıfır Silme T=0:Ts:30; % 30 saniyelik simülasyon hold off step(gcl,t) % Basamak Yanıtının elde edilmesi 44 / 72
45 Örnekleme Periyodu Nasıl Seçilir? 1. Kapalı çevrimin sağlaması istenen ωn ve ζ değerleri aşım, yükselme zamanı, yerleşme zamanı gibi kriterler dikkate alınarak belirlenir. 2. ωn ve ζ değerleri yardımıyla sönümsüz osilasyon frekansı belirlenir. p ωd = ωn 1 ζ 2 (rad/san) 3. Sönümsüz osilasyon periyodu T = 2π ωd (san.) 4. Örnekleme periyodu bu değerin en az 1/8 i; ideal olarak 1/25 inden daha azı olmalıdır. Yani bir periyod boyunca en az 8 örnek alınmalıdır. T Ts 8 45 / 72
46 Örneğimizde örnekleme periyodu nasıl seçildi? Aşım ve yükselme zamanı kriterleri neticesinde arzu edilen kapalı çevrim sistem beklentileri: ωn = 0.46, ζ = 0.5 olmasına karar vermiştik. Bu durumda p p ωd = ωn 1 ζ 2 = = = T = = Ts = 46 / 72 2π 16 ωd T 16 = = 2 (san) 8 8
47 Uygulamada Kullanılan Tipik Örnekleme Süreleri Uygulama Örnekleme Periyodu (San.) Akış Hızı Kontrol Sistemleri Seviye Kontrol Sistemleri Basınç Kontrol Sistemleri Sıcaklık Kontrol Sistemleri Sıvı Damıtma Sistemleri Servo Mekanizmalar Katalitik Reaktörler Çimento Sistemleri / 72
48 Örnek Tasarım: Bol salınımlı kütle-yay sistemi İkinci dereceden tipik bir sistemi kontrol etmeye çalışalım. Bu sistem içinm ζ = 0.1, ωn = 100rad/s (16Hz) olsun. Bu sistem: G (s) = Y (s) 1002 = 2 R(s) s Sistem Spesifikasyonları: Sayısal Kontrolör PO %10 tr 0.03san. Sistem Tipi=1 (Basamak girişe sıfır k.h.h) 48 / 72
49 Açık Çevrim Sistem Yanıtı(Çok kötü!!!) Step Response Amplitude / Time (seconds)
50 Tasarım: PO %10 = ζ 0.54 tr 0.03 san. = ωn 1.8 = 60 rad/s 0.03 Örnekleme süresinin seçimi Kapalı çevrim sistem: p p ωd = ωn 1 ζ 2 = = 50 rad/s = Ts = 50 / 72 2π 2π = 0.01 san. 10 ωd 10 50
51 Tasarım... Sistemin ZOH ile birlikte ayrık modeli G (z) = 51 / (z ) (z j0.7589)(z j0.7589)
52 Açık Çevrim Sistemin KYE Root Locus Imaginary Axis / Real Axis
53 Kontrolörün yapması gerekenler: Yavaş ve Baskın Kutupların (p1,2 = ± j0.7589) silinmesi z 1 kutup terimi ile KHH sının sıfırlanması Reel eksen üzerine bir adet kutup konulması (ζ = 0.54 Logaritmik spiralinin altına ve ωtn = 0.6 eğrisinin dışına (Örneğin z = 0)) = D(z) = K (z j0.7589)(z j0.7589) z(z 1) Karakteristik Polinom: (z) = 1 + KD(z)G (z) = (z) = 1 + K K =? 53 / 72 (z ) z(z 1) (Cevap=Kök Yer Eğrisi)
54 K Kazancı KYE Kullanılarak Hesaplanır! Root Locus ACS ACK data3 KC KYE System: KC KYE Gain: Pole: i Damping: Overshoot (%): 6.63 Frequency (rad/s): Imaginary Part Imaginary Axis / Real Part Real Axis 0.5 1
55 Kontrolör 0.644(z j0.7589)(z j0.7589) z(z 1) (z z ) = z(z 1) D(z) = 55 / 72
56 MATLAB/SIMULINK Benzetim Sonuçları 56 / 72
57 PID Tipi Sayısal Kontrolörlerin Tasarımı Proses Kontrol Sistemlerinde ve Endüstriyel Kontrol Sistemlerinde çok sık kullanılan bir yöntem Endüstriyel Sistemlerde kullanılan kontrolörlerin yaklaşık %90 ı PID kontrolörlerdir. Bir PID tipi kontrol mekanizması 3 paçadan oluşur. Bunlar P : Oransal Kısım, I : Entegratör, D: Türev kontrolü P kontrolörü tipik kazanç elemanıdır. I Kontrolü kararlı hal hatasını temizlemede kullanılır. D Kontrolü geçici rejim yanıtını hızlandırmak amacı ile tercih edilir. 57 / 72
58 Oransal Kontrol (P) R(s) + E(s) D(s) U (s) G(s) Y (s) R(z) + E(z) D(z) U (z) G(z) Y (z) u kontrol sinyali, e takip hatası olmak üzere: Sürekli zamanda u(t) = kp e(t) = D(s) = kp Ayrık zamanda u(k) = kp e(k) = D(z) = kp 58 / 72
59 Türev Kontrolü (D) Sürekli zamanda u(t) = kd e (t) = D(s) = kd s Ayrık zamanda (T : örnekleme periyodu) u(k) = kd 59 / 72 e(k) e(k 1) 1 z 1 z 1 = D(z) = kd = kd T T Tz
60 Entegral Kontrolü (I) Sürekli zamanda Z t u(t) = ki e(t)dt = D(s) = ki t0 1 s Ayrık zamanda (T : örnekleme periyodu) u(k) = u(k 1) + ki Te(k) = D(z) = 60 / 72 ki T ki Tz = 1 1 z z 1
61 Sayısal PI, PD, PID Kontrolörler(En genel tip) T örnekleme süreleri kontrolör katsayıları içine sokulabilir: Sayısal PID D(z) = k p + k d (kp + ki + kd )z 2 (kp + 2kd )z + kd z 1 k i Tz + = Tz z 1 z(z 1) Sayısal PI D(z) = kp + 61 / 72 (kp + ki )z kp ki z = z 1 z 1
62 Sayısal PD D(z) = kp + kd 62 / 72 (kp + kd )z kd z 1 = z z
63 Bilineer (Tustin) Dönüşüm ile PID Kontrolör Bilineer Dönüşüm ile PID D(z) = ki kp + + kd s s = kp + s= T2 ( z 1 z+1 ) ki T (z + 1) 2kd (z 1) α2 z 2 + α1 z + α0 + = 2(z 1) T (z + 1) (z 1)(z + 1) Burada α0, α1 ve α2 tasarım parametreleridir ve kp, ki, kd ve T nin fonksiyonlarıdır. 63 / 72
64 Bilineer (Tustin) Dönüşüm ile PI Kontrolör Bilineer Dönüşüm ile PI = kp + ki T (z + 1) α1 z + α0 = 2(z 1) z 1 D(z) = (kp + kd s)s= 2 ( z 1 ) = kp + 2kd (z 1) α1 z + α0 = T (z + 1) z +1 D(z) = kp + ki s s= T2 ( z 1 z+1 ) Bilineer Dönüşüm ile PD T 64 / 72 z+1
 tasarlanacaktır. İstenilenler Araç durur halden 100km/s hıza 8san.")
65 Örnek : Sayısal PI Kontrolör Tasarımı Kütlesi m = 1000kg olan bir aracın sürtünme katsayısı b = 100 olsun. Bu araç için otomatik hız kontrol sistemi (cruise control) tasarlanacaktır. İstenilenler Araç durur halden 100km/s hıza 8san. de ulaşabilmeli Aşım %20 yi geçmemeli m = 1000kg u(t) = F (t) b = / 72
66 Sistem Transfer Fonksiyonu mv (t) + bv (t) = F (t) = G (s) = G (s) G (z) = (1 z )Z = (1 z )Z s s(s + 0.1) 0.01 z = Z z s s z 1 z z = 0.01 = z z 1 z e z / = ms + b 1000s + 100
67 Aracın 8 saniyede 100km/s hıza yerleşmesi için ζωn PO %20 = ζ 0.48 T = 0.6san. fazlası ile yeterli olacaktır! Arzu Edilen Dinamik Beklentiler Yukarıdaki çıkarımlardan kapalı çevrim sistem için ζ = 0.7 olsun. Bu durumda ωn 0.82 olmalıdır. 67 / 72
68 Kontrol Sistemi Yapısı D(z) G(z) PI Kontrol r e + 68 / 72 (kp+ki)z kp z 1 u z y
69 Kapalı Çevrim Transfer Fonksiyonu G (z)d(z) 1 + G (z)d(z) (kp + ki )z kp = 2 z + [ (kp + ki ) 1.942]z + ( kp ) H(z) = 69 / 72
70 Arzu Edilen Sistem ζ = 0.7, ωn = 0.82 olması isteniyor. G (s) = ωn2 s 2 + 2ζωn s + ωn2 az sönümlü bir sistem içinprototip sisteminin kökleri p s1,2 = ζωn ± jωn 1 ζ 2 z = e st = p1,2 = ± j Bu durumda arzu edilen davranışı sağlayan transfer fonksiyonu: Hd (z) = 70 / 72 (1 p1 )(1 p2 ) = 2 (z p1 )(z p2 ) z 1.331z
71 Yöntem Yapılacak iş H(z) ile Hd (z) nin paydalarını eşitleyerek kp ve ki sabitlerini bulmaktır. Pay polinomları farklıdır. Ancak bu konuda yapılabilecek pek bir şey yok. z 2 +[ (kp +ki ) 1.942]z+( kp ) = z z = 71 / (kp + ki ) = kp = kp = 758, ki = 295 = D(z) = 1053z 758 z 1
72 MATLAB/SIMULINK Benzetimi 72 / 72
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Tanım: Kök yer eğrisi sistem parametrelerinin değişimi ile sistemin kapalı döngü köklerinin s düzlemindeki yerini gösteren grafiktir.
 Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Kök Yer Eğrileri Kök Yer Eğrileri Bir kontrol tasarımcısı sistemin kararlı olup olmadığını ve kararlılık derecesini bilmek, diferansiyel denklem çözmeden bir analiz ile sistem performansını tahmin etmek
Sayısal Kontrol - HAVA HARP OKULU
 Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
Sayısal Kontrol - HAVA HARP OKULU İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 50 Bu bölümde aşağıdaki konular incelenecektir: Sürekli ve Ayrık Kontrol Problemlerinin Tanımı Ayrık Zamanlı
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
Elektrik - Elektronik Fakültesi
 . Elektrik - Elektronik Fakültesi KON314 Kontrol Sistem Tasar m Ödev #1 Birol Çapa-4645 Doç. Dr. Mehmet Turan Söylemez 23.3.29 1 1.a.Amaç Transfer fonksiyonu ( n 1 ve n üzerine konulan bir kontrolör ile
. Elektrik - Elektronik Fakültesi KON314 Kontrol Sistem Tasar m Ödev #1 Birol Çapa-4645 Doç. Dr. Mehmet Turan Söylemez 23.3.29 1 1.a.Amaç Transfer fonksiyonu ( n 1 ve n üzerine konulan bir kontrolör ile
Kontrol Sistemlerinin Tasarımı
 Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım II PD Denetleyici ve Faz İlerletici Dengeleyici 1 Ardarda (Kaskat) bağlantı kullanılarak geri beslemeli sistemin geçici rejim cevabının iyileştirilmesi
Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım II PD Denetleyici ve Faz İlerletici Dengeleyici 1 Ardarda (Kaskat) bağlantı kullanılarak geri beslemeli sistemin geçici rejim cevabının iyileştirilmesi
Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi
 Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 41 Bu bölümde aşağıdaki konular incelenecektir: Nümerik
Sayısal Kontrol - HAVA HARP OKULU Bölüm 2 Sürekli Zaman Sistemlerin Ayrık Benzetimi İbrahim Beklan Küçükdemiral Yıldız Teknik Üniversitesi 2015 1 / 41 Bu bölümde aşağıdaki konular incelenecektir: Nümerik
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Ball and Beam Deneyi.../../205 ) Giriş Bu deneyde amaç kök yerleştirme (Pole placement) yöntemi ile top ve çubuk (ball
H(s) B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s
 B(s) V (s) Yer Kök Eğrileri. Şekil13. V s R s = K H s. B s =1için. 1 K H s") Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
Yer Kök Eğrileri R(s) K H(s) V (s) V s R s = K H s 1 K H s B s =1için B(s) Şekil13 Kapalı çevrim sistemin kutupları 1+KH(s)=0 özyapısal denkleminden elde edilir. b s H s = a s a s K b s =0 a s K b s =0
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
KST Lab. Shake Table Deney Föyü
 KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
KST Lab. Shake Table Deney Föyü 1. Shake Table Deney Düzeneği Quanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ
 25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
25. KARARLILIK KAPALI ÇEVRİM SİSTEMLERİNİN KARARLILIK İNCELENMESİ a-) Routh Hurwitz Kararlılık Ölçütü b-) Kök Yer Eğrileri Yöntemi c-) Nyquist Yöntemi d-) Bode Yöntemi 1 2 3 4 a) Routh Hurwitz Kararlılık
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
BÖLÜM-9 SİSTEM HASSASİYETİ
 65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
65 BÖLÜM-9 SİSTEM HASSASİYETİ Parametre Değişimlerinin Hassasiyeti Belirsiz sistem elemanlarının davranışı o Parametre değerlerinin hatalı bilgileri o Çevrenin değişimi o Yaşlanma vb nedenlerle bozulma
KON 314 KONTROL SİSTEM TASARIMI
 KON 34 KONTROL SİSTEM TASARIMI PROJE 2 Öğretim Üyesi: Doç. Dr. Mehmet Turan SÖYLEMEZ HAZIRLAYANLAR TAKIM 6 45437 Burak BEŞER 45442 Elif KÖKSAL 464 Muharrem ULU 4645 Birol ÇAPA Teslim Tarihi: 24.4.29 GİRİŞ
KON 34 KONTROL SİSTEM TASARIMI PROJE 2 Öğretim Üyesi: Doç. Dr. Mehmet Turan SÖYLEMEZ HAZIRLAYANLAR TAKIM 6 45437 Burak BEŞER 45442 Elif KÖKSAL 464 Muharrem ULU 4645 Birol ÇAPA Teslim Tarihi: 24.4.29 GİRİŞ
Kontrol Sistemlerinin Tasarımı
 Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım IV Geribesleme Üzerinden Denetim ve Fiziksel Gerçekleme Prof.Dr.Galip Cansever 2 3 Denetleyiciyi veya dengeleyiciyi geribesleme hattı üzerine
Kontrol Sistemlerinin Tasarımı Kök Yer Eğrileri ile Tasarım IV Geribesleme Üzerinden Denetim ve Fiziksel Gerçekleme Prof.Dr.Galip Cansever 2 3 Denetleyiciyi veya dengeleyiciyi geribesleme hattı üzerine
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
Otomatik Kontrol. Kontrol Sistemlerin Temel Özellikleri
 Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
ELN3052 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - 2 TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI:
 ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
ELN35 OTOMATİK KONTROL MATLAB ÖRNEKLERİ - TRANSFER FONKSİYONU, BLOK ŞEMA VE SİSTEM BENZETİMİ UYGULAMALARI: Control System Toolbox içinde dinamik sistemlerin transfer fonksiyonlarını tanımlamak için tf,
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Bir önceki
Kontrol Sistemlerinin Analizi
 Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
SAYISAL KONTROL 2 PROJESİ
 SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
SAYISAL KONTROL 2 PROJESİ AUTOMATIC CONTROL TELELAB (ACT) ile UZAKTAN KONTROL DENEYLERİ Automatic Control Telelab (ACT), kontrol deneylerinin uzaktan yapılmasını sağlayan web tabanlı bir sistemdir. Web
Mat-Lab ile Kök Yer Eğrileri
 Mat-Lab ile Kök Yer Eğrileri Prof.Dr. Galip Cansever 1 MatLab ile Kök yer eğrisi çiziminde num = = num 1 + K = 0 den ( s s m + z 1 b s 1 )( s m 1 z m formunu kullanacağız. )...( s +... + b m z m ) den
Mat-Lab ile Kök Yer Eğrileri Prof.Dr. Galip Cansever 1 MatLab ile Kök yer eğrisi çiziminde num = = num 1 + K = 0 den ( s s m + z 1 b s 1 )( s m 1 z m formunu kullanacağız. )...( s +... + b m z m ) den
Sayısal Filtre Tasarımı
 Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
Sayısal Filtre Tasarımı Sayısal Filtreler Filtreler ayrık zamanlı sistemlerdir. Filtreler işaretin belirli frekanslarını güçlendirmek veya zayıflatmak, belirli frekanslarını tamamen bastırmak veya belirli
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
KARARLILIK Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: Geçici Durum Cevabı Kararlılık Kalıcı Durum Hatası Bu üç temel spesifikasyon arasında en önemlisi kararlılıktır. Eğer
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Contents. Doğrusal sistemler için kontrol tasarım yaklaşımları
 Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
PROSES KONTROL DENEY FÖYÜ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
BÖLÜM 5 OTOMATİK KONTROL FORMLARI 5.1 AÇIK KAPALI KONTROL (ON-OFF) BİLGİSAYARLI KONTROL
 BİLGİSAYARLI KONTROL") BÖLÜM 5 OTOMATİK KONTROL FORMLARI Otomatik kontrolda, kontrol edici cihazın, set değeri etrafında gereken hassasiyetle çalışırken, hatayı gereken oranda minimuma indirecek çeşitli kontrol formları vardır.
BÖLÜM 5 OTOMATİK KONTROL FORMLARI Otomatik kontrolda, kontrol edici cihazın, set değeri etrafında gereken hassasiyetle çalışırken, hatayı gereken oranda minimuma indirecek çeşitli kontrol formları vardır.
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN TÜM DURUM GERİ BESLEMELİ HIZ KONTROLÜ VE CE120 CONTROLLER SETİN
30. HAZERFAN İHA nın UZUNLAMASINA HAREKET DİNAMİĞİ ve KONTROLÜ. Özet
 3. HAZERAN İHA nın UZUNLAMASINA HAREKET DİNAMİĞİ ve KONTROLÜ Özet Gelişen havacılık teknolojisiyle birlikte gelişimini sürdüren İHAları son zamanlarda üzerinde araştırmalar ve yatırımlar yapılan öncelikli
3. HAZERAN İHA nın UZUNLAMASINA HAREKET DİNAMİĞİ ve KONTROLÜ Özet Gelişen havacılık teknolojisiyle birlikte gelişimini sürdüren İHAları son zamanlarda üzerinde araştırmalar ve yatırımlar yapılan öncelikli
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI. Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No:2 Birinci-İkinci Dereceden Denklemler Açık-Kapalı Çevrim Sistemler Öğr. Gör. Cenk GEZEGİN Arş.
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2018 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ
 SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
SAYISAL KONTROL SİSTEMLERİNİN z-düzleminde ANALİZİ Bu derste ve takip eden derste, sayısal kontrol sistemlerinin z-düzleminde analizi ve tasarımı için gerekli materyal sunulacaktır. z-dönüşümü Yönteminin
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8
 FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 8 DC MOTORUN AYRIK ZAMANDA KONUM VE HIZ KONTROLÜ 1. Amaç: Bir DC motorunun konum
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi. H a z ı r l aya n : D r. N u r d a n B i l g i n
 Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Sistemin İşlevsel Kalitesi Kapalı Çevrim Kontrol Sistemin İşlevsel
Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Sistemin İşlevsel Kalitesi Kapalı Çevrim Kontrol Sistemin İşlevsel
MEB YÖK MESLEK YÜKSEKOKULLARI PROGRAM GELĐŞTĐRME PROJESĐ. 1. Endüstride kullanılan Otomatik Kontrolun temel kavramlarını açıklayabilme.
 PROGRAMIN ADI DERSĐN ADI DERSĐN ĐŞLENECEĞĐ YARIYIL HAFTALIK DERS SAATĐ DERSĐN SÜRESĐ ENDÜSTRĐYEL OTOMASYON SÜREÇ KONTROL 2. Yıl III. Yarıyıl 4 (Teori: 3, Uygulama: 1, Kredi:4) 56 Saat AMAÇLAR 1. Endüstride
PROGRAMIN ADI DERSĐN ADI DERSĐN ĐŞLENECEĞĐ YARIYIL HAFTALIK DERS SAATĐ DERSĐN SÜRESĐ ENDÜSTRĐYEL OTOMASYON SÜREÇ KONTROL 2. Yıl III. Yarıyıl 4 (Teori: 3, Uygulama: 1, Kredi:4) 56 Saat AMAÇLAR 1. Endüstride
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ
 DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
DENEY 3 HAVALI KONUM KONTROL SİSTEMİ DENEY FÖYÜ 1. Deneyin Amacı Bu deneyde, bir fiziksel sistem verildiğinde, bu sistemi kontrol etmek için temelde hangi adımların izlenmesi gerektiğinin kavranması amaçlanmaktadır.
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
PID SÜREKLİ KONTROL ORGANI:
 PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
Deney 5 : Ayrık Filtre Tasarımı. Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç
 İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
İ. Ü. Elektrik&Elektronik Müh. Böl. İŞARET İŞLEME ve UYGULAMALARI Deney 5 : Ayrık Filtre Tasarımı Prof. Dr. Aydın Akan Bahattin Karakaya Umut Gündoğdu Yeşim Hekim Tanç Deney 5 : Ayrık Filtre Tasarımı 1.
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER
 FİLTRELER") SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
SAYISAL İŞARET İŞLEME LABORATUARI LAB 5: SONSUZ DÜRTÜ YANITLI (IIR) FİLTRELER Bu bölümde aşağıdaki başlıklar ele alınacaktır. Sonsuz dürtü yanıtlı filtre yapıları: Direkt Şekil-1, Direkt Şekil-II, Kaskad
KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU
 KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU B. HACIBEKİROĞLU, Y. GÖKÇE, S. ERTUNÇ, B. AKAY Ankara Üniversitesi, Mühendislik
KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU B. HACIBEKİROĞLU, Y. GÖKÇE, S. ERTUNÇ, B. AKAY Ankara Üniversitesi, Mühendislik
İstanbul Teknik Üniversitesi Elektrik Elektronik Fakültesi
 İstanbul Teknik Üniversitesi Elektrik Elektronik Fakültesi Kontrol Sistem Tasarımı PROJE 3 Öğretim Üyesi: Doç. Dr. Mehmet Turan SÖYLEMEZ Hazırlayanlar TAKIM 8 Burak Beşer 45437 Elif Köksal 45442 Muharrem
İstanbul Teknik Üniversitesi Elektrik Elektronik Fakültesi Kontrol Sistem Tasarımı PROJE 3 Öğretim Üyesi: Doç. Dr. Mehmet Turan SÖYLEMEZ Hazırlayanlar TAKIM 8 Burak Beşer 45437 Elif Köksal 45442 Muharrem
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
MAK669 LINEER ROBUST KONTROL Prof.Dr. Selim SİVRİOĞLU s.selim@gyte.edu.tr 26.09.2014 1 Ders takvimi Toplam 12 hafta içinde 10 hafta ders 1 hafta laboratuar uygulaması ve 1 hafta sınav yapılacaktır. Derse
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ
 MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
 Yukarıdaki şekilde, birim geribeslemeli bir kontrol sisteminin ileri yol transfer fonksiyonuna ait, sistemin orijinal çevrim kazancı K = 1 için deneysel olarak elde edilmiş Bode eğrisi verilmiştir. Aşağıdaki
Yukarıdaki şekilde, birim geribeslemeli bir kontrol sisteminin ileri yol transfer fonksiyonuna ait, sistemin orijinal çevrim kazancı K = 1 için deneysel olarak elde edilmiş Bode eğrisi verilmiştir. Aşağıdaki
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI
 EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
Analog Alçak Geçiren Filtre Karakteristikleri
 Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Analog Alçak Geçiren Filtre Karakteristikleri Analog alçak geçiren bir filtrenin genlik yanıtı H a (jω) aşağıda gösterildiği gibi verilebilir. Ω p : Geçirme bandı kenar frekansı Ω s : Söndürme bandı kenar
Kontrol Sistemleri Tasarımı
 Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
Kontrol Sistemleri Tasarımı Giriş ve Temel Kavramlar Prof. Dr. Bülent E. Platin Giriş Çalıştay İçeriği: Giriş ve Temel Kavramlar Açık Çevrim Kontrol Kapalı Çevrim Kontrol Kök Yer Eğrileri ve Yöntemleri
MAK669 LINEER ROBUST KONTROL
 MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
MAK669 LINEER ROBUS KONROL s.selim@gyte.edu.tr 14.11.014 1 State Feedback H Control x Ax B w B u 1 z C x D w D u 1 11 1 (I) w Gs () u y x K z z (full state feedback) 1 J ( u, w) ( ) z z w w dt t0 (II)
AMASYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü
 AMASYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü Denetim Sistemleri Laboratuvarı Deney Föyü Öğr.Gör.Cenk GEZEGİN Arş.Gör.Birsen BOYLU AYVAZ DENEY 3-RAPOR PİD DENETİM Öğrencinin
AMASYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü Denetim Sistemleri Laboratuvarı Deney Föyü Öğr.Gör.Cenk GEZEGİN Arş.Gör.Birsen BOYLU AYVAZ DENEY 3-RAPOR PİD DENETİM Öğrencinin
SİNYALLER VE SİSTEMLERİN MATLAB YARDIMIYLA BENZETİMİ
 SİNYALLER VE SİSTEMLERİN MATLAB YARDIMIYLA BENZETİMİ 2.1. Sinyal Üretimi Bu laboratuarda analog sinyaller ve sistemlerin sayısal bir ortamda benzetimini yapacağımız için örneklenmiş sinyaller üzerinde
SİNYALLER VE SİSTEMLERİN MATLAB YARDIMIYLA BENZETİMİ 2.1. Sinyal Üretimi Bu laboratuarda analog sinyaller ve sistemlerin sayısal bir ortamda benzetimini yapacağımız için örneklenmiş sinyaller üzerinde
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") 1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
1 2 1 3 4 2 5 6 3 7 8 4 9 10 5 11 12 6 K 13 Örnek Kararlılık Tablosunu hazırlayınız 14 7 15 Kapalı çevrim kutupları ve kararlıkları a. Kararlı sistem; b. Kararsız sistem 2000, John Wiley & Sons, Inc. Nise/Cotrol
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ
 BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
BÖLÜM 4 TEK SERBESTLİK DERECELİ SİSTEMLERİN HARMONİK OLARAK ZORLANMIŞ TİTREŞİMİ Kaynaklar: S.S. Rao, Mechanical Vibrations, Pearson, Zeki Kıral Ders notları Mekanik veya yapısal sistemlere dışarıdan bir
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-I
 YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-I DENEY -8- PID KONTROL İLE DC MOTOR KONTROLÜ HAZIRLIK SORULARI: Arama motoruna PID
YALOVA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Enerji Sistemleri Mühendisliği Bölümü ESM 413 Enerji Sistemleri Laboratuvarı-I DENEY -8- PID KONTROL İLE DC MOTOR KONTROLÜ HAZIRLIK SORULARI: Arama motoruna PID
Dijital Kontrol Sistemleri Prof.Dr. Ayhan Özdemir. Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir.
 Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
Dengede bulunan kütle-yay sistemine uygulanan kuvvetin zamana göre değişimi aşağıda verilmiştir. u(t):kuvvet u(t) F yay F sönm Yay k:yay sabiti m kütle Sönümlirici b:ösnümlirme sabiti y(t):konum 1 1 3
PID KONTROLÖR İLE TASARIM
 ONTROLÖR İLE TASARM Öet:Bu konuda,,, kontrolörleri ile tasarım, hem aman tanım aralığında hem de frekans tanım aralığında ele alınarak incelenmiştir. Ayrıca ek olarak ise matematik modeli olmayan sistemlerde
ONTROLÖR İLE TASARM Öet:Bu konuda,,, kontrolörleri ile tasarım, hem aman tanım aralığında hem de frekans tanım aralığında ele alınarak incelenmiştir. Ayrıca ek olarak ise matematik modeli olmayan sistemlerde
İleri leri Kompanzasyon
 İleri leri Kompanzasyon İleri Kompanzasyon (Lead( Compensation) geçici durum tepkisini iyileştirir. Açık k döngd ngü sistemin transfer fonksiyonuna kazanç geçiş frekansında nda (ω( gc ) faz ekler. Kontrol
İleri leri Kompanzasyon İleri Kompanzasyon (Lead( Compensation) geçici durum tepkisini iyileştirir. Açık k döngd ngü sistemin transfer fonksiyonuna kazanç geçiş frekansında nda (ω( gc ) faz ekler. Kontrol
Devre Teorisi Ders Notu Dr. Nurettin ACIR ve Dr. Engin Cemal MENGÜÇ
 BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
BÖLÜM III RLC DEVRELERİN DOĞAL VE BASAMAK CEVABI RLC devreler; bir önceki bölümde gördüğümüz RC ve RL devrelerden farklı olarak indüktör ve kapasitör elemanlarını birlikte bulundururlar. RLC devrelerini
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL)
") AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL) Ayrık-zamanda çalışırken sinyaller bütün zamanlar için değil, sadece belli zaman anları için tanımlıdır. Bu zaman anları arasındaki aralığa Ts diyelim. Örneğin
AYRIK-ZAMANLI KONTROL (~ DİJİTAL KONTROL) Ayrık-zamanda çalışırken sinyaller bütün zamanlar için değil, sadece belli zaman anları için tanımlıdır. Bu zaman anları arasındaki aralığa Ts diyelim. Örneğin
İÇİNDEKİLER 1. GİRİŞ.3 2. OTOMATİK KONTROL 3 3. TESİSLERDE PROSES KONTROLÜNÜN GEREKLİLİĞİ.3 4. KONTROL SİSTEMLERİNİN TÜRLERİ
 PROSES KONTROLÜ İÇİNDEKİLER 1. GİRİŞ...3 2. OTOMATİK KONTROL 3 3. TESİSLERDE PROSES KONTROLÜNÜN GEREKLİLİĞİ...3 4. KONTROL SİSTEMLERİNİN TÜRLERİ....4 4.1. AÇIK ÇEVRİM KONTROL SİSTEMLERİ..... 4 4.2. KAPALI
PROSES KONTROLÜ İÇİNDEKİLER 1. GİRİŞ...3 2. OTOMATİK KONTROL 3 3. TESİSLERDE PROSES KONTROLÜNÜN GEREKLİLİĞİ...3 4. KONTROL SİSTEMLERİNİN TÜRLERİ....4 4.1. AÇIK ÇEVRİM KONTROL SİSTEMLERİ..... 4 4.2. KAPALI
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Zorlamalı Titreşim ş Testleri
 Zorlamalı Titreşim ş Testleri Prof. Dr. Uğurhan Akyüz SERAMAR Çalıştayı 01 Ekim 2010 Hatay, Türkiye Amaç 2 Yapı sistemlerinin deprem, rüzgar, vb. dinamik yüklere maruz kaldığında gösterdiği davranışı belirleyen
Zorlamalı Titreşim ş Testleri Prof. Dr. Uğurhan Akyüz SERAMAR Çalıştayı 01 Ekim 2010 Hatay, Türkiye Amaç 2 Yapı sistemlerinin deprem, rüzgar, vb. dinamik yüklere maruz kaldığında gösterdiği davranışı belirleyen
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU. Deney No: 3 PID KONTROLÜ
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ LABORATUVARI DENEY RAPORU Deney No: 3 PID KONTROLÜ Öğr. Gör. Cenk GEZEGİN Arş. Gör. Ayşe AYDIN YURDUSEV Öğrenci: Adı Soyadı Numarası
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME
 TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TRANSİSTÖRLÜ YÜKSELTEÇLERDE GERİBESLEME Amaç Elektronikte geniş uygulama alanı bulan geribesleme, sistemin çıkış büyüklüğünden elde edilen ve giriş büyüklüğü ile aynı nitelikte bir işaretin girişe gelmesi
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER
 TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015
TIBBİ ENSTRUMANTASYON TASARIM VE UYGULAMALARI SAYISAL FİLTRELER SUNU PLANI Analog sayısal çevirici FIR Filtreler IIR Filtreler Adaptif Filtreler Pan-Tompkins Algoritması Araş. Gör. Berat Doğan 08/04/2015