Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
|
|
|
- Ece Bölükbaşı
- 5 yıl önce
- İzleme sayısı:
Transkript
1 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş
2 Bölüm 12 Parçacık Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
3 12 Parçacık Kinematiği Bu bölümde, bir parçacığın sabit ve hareketli referans sistemlerine göre ölçülen hareketinin geometrik yönlerini inceleyeceğiz. Yörünge, değişik koordinat sistemi tiplerine göre tanımlanacak ve hareketin koordinat eksenleri üzerindeki bileşenleri belirlenecektir. Basit olması için, bir eğri boyunca olan genel hareketten önce, doğrusal hareket incelenecektir.
4 12.1 Doğrusal Kinematik: Sürekli Hareket Mühendislik mekaniğinin ilk kısmı, duran veya sabit hızla hareket eden cisimlerin denge durumunu ele alan statik e ayrılmıştı. İkinci kısım ise, ivmeli hareket eden cisimleri ele alan dinamik e ayrılmıştır. Bu kitapta dinamik konusu da ikiye ayrılmıştır: hareketin sadece geometrik yönlerini inceleyen kinematik ve harekete neden olan kuvvetlerin analizi olan kinetik. Öncelikle parçacık dinamiği incelenecek, daha sonra iki ve üç boyutlu rijit cisim dinamiği konuları gelecektir.
5 12.1 Doğrusal Kinematik: Sürekli Hareket Parçacık kinematiği ile başlıyoruz. Bir parçacığın bir kütlesi vardır fakat büyüklüğü ve şekli ihmal edilebilir. Çoğu problemde, füzeler, mermiler veya arabalar gibi sonlu büyüklükteki cisimlerle ilgilenilmektedir. Cismin hareketi kütle merkezinin hareketi ile ifade edilebiliyor ve herhangi bir dönme hareketi ihmal edilebiliyorsa, bu cisimler parçacık olarak nitelenebilir.
6 12.1 Doğrusal Kinematik: Sürekli Hareket Doğrusal Kinematik. Bir parçacık doğrusal ya da eğrisel bir yörünge üzerinde hareket edebilir. Öncelikle doğrusal hareketi inceleyeceğiz. Bu hareketin kinematiği, parçacığın verilen herhangi bir andaki konum, hız ve ivmesinin belirlenmesi olarak tanımlanır. Konum. Parçacığın doğrusal yörüngesi tek bir s koordinat ekseni ile tanımlanabilir. Konum P Büyüklüğü O dan P ye olan uzaklıktır, genellikle metre ile ölçülür. Seçim keyfi olmakla birlikte, şekildeki durumda s pozitiftir.
7 12.1 Doğrusal Kinematik: Sürekli Hareket Yer Değiştirme. Parçacığın yer değiştirmesi konumundaki değişme olarak tanımlanır. P P Yer Değiştirme Bir parçacığın yer değiştirmesi vektörel bir büyüklük olduğundan, katedilen mesafeden farklıdır. Katedilen mesafe bir pozitif skalerdir ve parçacığın aldığı yolun toplam uzunluğunu gösterir.
8 12.1 Doğrusal Kinematik: Sürekli Hareket Hız. Parçacığın Δt zaman aralığındaki ortalama hızı: Hız Anlık hız Δt ve dt daima pozitif olduğundan, hızın yönünü belirten işaret Δs ile aynıdır. Örneğin, parçacık sağa doğru hareket ediyorsa, hızı pozitiftir. Hızın büyüklüğü genellikle m/s ile ifade edilir.
9 12.1 Doğrusal Kinematik: Sürekli Hareket Hız. Parçacığın Δt zaman aralığındaki ortalama hızı: Hız Anlık hız Ortalama sürat daima pozitif bir skalerdir ve parçacığın aldığı st toplam yolunun geçen Δt zamanına oranıdır:
10 12.1 Doğrusal Kinematik: Sürekli Hareket İvme. Parçacığın P ve P gibi iki noktadaki hızı bilindiğinde, Δt zaman aralığında: Hızlanma Yavaşlama Hem ortalama hem de anlık ivme pozitif ya da negatif olabilir. Hız sabit olduğunda ivme sıfırdır. İvme birimi olarak çoğunlukla m/s 2 kullanılır.

11 12.1 Doğrusal Kinematik: Sürekli Hareket Sabit ivme, a = ac. İvme sabit olduğunda ac = dv/dt, v = ds/dt ve acds = vdv kinematik denklemleri integre edilebilir. Böylece ac, v, s ve t yi bağlayan formüller elde edilir. Zamanın Fonksiyonu Olarak Hız. Başlangıçta t = 0 iken v = v0 olduğunu varsayarak ac = dv/dt yi integte edelim: Sabit İvme

12 12.1 Doğrusal Kinematik: Sürekli Hareket Zamanın Fonksiyonu Olarak Konum. Başlangıçta t = 0 iken s = s0 olduğunu varsayarak v = ds/dt = v0 + act yi integte edelim: Sabit İvme

13 12.1 Doğrusal Kinematik: Sürekli Hareket Konumun Fonksiyonu Olarak Hız. s = s0 ve v = v0 olduğunu varsayarak v dv = ac ds yi integte edelim: Sabit İvme Verilen denklemler sadece ivme sabit olduğunda ve t = 0 iken s = s0, v = v0 olduğunda geçerlidir.
14 Örnek 12-1 Şekildeki araba hızı v = 0.3(9t 2 + 2t) m/s olacak şekilde bir doğru üzerinde kısa bir süre hareket ediyor. t nin birimi saniyedir. t = 3 s iken konumunu ve ivmesini belirleyiniz. t = 0 da s = 0 dır.
15 Örnek 12-1 Konum. İvme.
16 Örnek 12-2 Bir mermi aşağıya doğru dikey olarak 60 m/s lik başlangıç hızıyla bir akışkan ortamın içine ateşleniyor. Mermi, a = (-0.4v 3 ) olacak şekilde yavaşlamakta ise, merminin ateşlendikten 4 s sonraki hızını ve konumunu belirleyiniz. Burada v m/s ile ölçülmektedir.

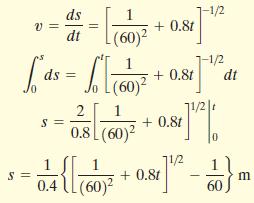
17 Örnek 12-2 Hız. Konum.
18 Örnek 12-3 Bir asansör 15 m/s ile yukarı doğru çıkmaktadır ve taşıyıcı kablo asansör yerden 40 m yüksekte iken kesilmektedir. Asansörün ulaştığı sb maksimum yüksekliğini ve yere çarpmadan hemen önceki hızını belirleyiniz. Bütün bu süre boyunca asansör hareket halindedir; yerçekiminden dolayı aşağıya doğru 9.81 m/s 2 lik bir ivmeye maruz kalmaktadır. Hava direncini ihmal ediniz.
19 Örnek 12-3 Maksimum Yükseklik. Hız.
20 Örnek 12-4 Metal bir parçacık, bir manyetik alanın etkisinde A plağından B plağına uzanan bir akışkanın içinde aşağı doğru yol almaktadır. Parçacık s = 100 mm olan C orta noktasından ilk hızsız bırakılırsa ve ivmesi s nin birimi metre olmak üzere a = (4s) m/s 2 olarak ölçülüyorsa, parçacığın s = 200 mm mesafedeki B plağına ulaştığındaki hızını ve C den B ye ulaşması için gerekli olan zamanı belirleyiniz.


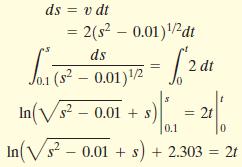
21 Örnek 12-4 Zaman. Hız.
22 Örnek 12-5 Bir parçacık hızı v = (3t 2 6t) m/s olacak şekilde yatay bir yörünge üzerinde hareket etmektedir. Burada t saniye olarak zamandır. Başlangıçta O merkezinde ise, t = 0 t = 3.5 s zaman aralığında parçacığın aldığı yolu, ortalama hız vektörünü ve ortalama hızı bulunuz.


23 Örnek 12-5 Alınan Yol. Hız.
24 12.2 Doğrusal Kinematik: Düzensiz Hareket Bir parçacığın hareketi düzensiz ise konum, hız ya da ivmesini tanımlayacak sürekli bir matematiksel fonksiyon elde etmek zor olabilir. Hareket, bir dizi eğri ile grafiksel olarak tanımlanabilir. Elde edilen grafik a, v, s, t değişkenlerinden herhangi ikisi arasındaki bağıntıyı tanımlıyorsa, diğer değişkenler arasındaki bağıntıyı tanımlayan bir grafik a = dv/dt, v = ds/dt, a ds = v dv kinematik denklemleri ile oluşturulabilir.
25 12.2 Doğrusal Kinematik: Düzensiz Hareket s t Grafiği verildiğinde v t Grafiğini Oluşturmak. Bir parçacığın t zaman aralığındaki konumu, deneysel olarak belirlenebiliyorsa, parçacığın s t grafiği çizilebilir. Parçacığın hızını zamanın fonksiyonu olarak belirlemek için, v s ve t yi bağlayan v = ds/dt yi kullanmalıyız. s t eğimi hız
26 12.2 Doğrusal Kinematik: Düzensiz Hareket v t Grafiği verildiğinde a t Grafiğini Oluşturmak. Bir parçacığın v t grafiği biliniyorsa, a t grafiği, a = dv/dt kullanılarak belirlenebilir. v t eğimi ivme
27 Örnek 12-6 Bir otomobil düz bir yol boyunca ilerlemektedir ve deneysel olarak konumu şekildeki gibi belirlenmiştir. 0 t 30 s zaman aralığı için v t ve a t grafiklerini oluşturunuz.
28 Örnek 12-6 v t Grafiği. Verilen bir anda s t grafiğinin eğimini ölçerek v nin belli değerlerini de elde edebiliriz.
29 Örnek 12-6 a t Grafiği.
30 12.2 Doğrusal Kinematik: Düzensiz Hareket a t Grafiği verildiğinde v t Grafiğini Oluşturmak. Bir zaman aralığında parçacığın hızındaki değişme aynı zaman aralığında a t grafiği altındaki alana eşittir. v t grafiği için parçacığın bilinen v0 hızına a t grafiğinden elde edilen küçük alan artımları (Δv) eklenir. Hızdaki değişim a t grafiği altındaki alan
31 12.2 Doğrusal Kinematik: Düzensiz Hareket v t Grafiği verildiğinde s t Grafiğini Oluşturmak. Bir zaman aralığında parçacığın yer değiştirmesi aynı zaman aralığında v t grafiği altındaki alana eşittir. s t grafiği için parçacığın bilinen s0 konumuna s t grafiğinden elde edilen küçük alan artımları (Δs) eklenir. Yer değiştirme v t grafiği altındaki alan
32 Örnek 12-7 Şekildeki araba durmakta iken harekete başlar ve düz bir yol üzerinde 10 s boyunca sabit ivmeyle hızlanıp sonra da sabit ivmeyle yavaşlayacak şekilde ilerler. v t ve s t grafiklerini çiziniz ve arabanın durması için gereken t zamanını belirleyiniz. Araba ne kadar yol almıştır?
33 Örnek 12-7 v t Grafiği.

34 Örnek 12-7 s t Grafiği.

35 12.2 Doğrusal Kinematik: Düzensiz Hareket a s Grafiği verildiğinde v s Grafiğini Oluşturmak. v s grafiği üzerindeki noktalar, v dv = a ds ifadesi kullanılarak belirlenebilir. Bu denklem, s = s0 da v = v0 ve s = s1 de v = v1 sınır değerleri arasında integre edilir: a s grafiği altındaki alan
 noktasında, v s grafiğinin dv/ds eğimi belirlenir.")
36 12.2 Doğrusal Kinematik: Düzensiz Hareket v s Grafiği verildiğinde a s Grafiğini Oluşturmak. Herhangi bir (s, v) noktasında, v s grafiğinin dv/ds eğimi belirlenir. a ds = v dv veya a = v (dv/ds) olduğundan, v ile dv/ds bilindiğinde, a belirlenebilir. ivme hız çarpı v s grafiğinin eğimi

37 Örnek 12-8 Bir motorsikletin hareketini tanımlayan v s grafiği görülmektedir. Hareketin a s grafiğini oluşturunuz ve motorsikletin s = 120 m konumuna ulaşması için gerekli zamanı belirleyiniz.
38 Örnek 12-8 a s Grafiği.
39 Örnek 12-8 Zaman.
40 12.3 Genel Eğrisel Hareket Eğrisel hareket, parçacık eğrisel bir yol üzerinde hareket ettiğinde oluşur. Bu yol genellikle üç boyutta tanımlandığından, parçacığın konumu, hızı ve ivmesini formüle etmek için vektör analizi kullanılır. Konum Yol Konum. O sabit noktasından ölçülen parçacığın konumu, konum vektörü r = r(t) ile belirtilecektir. Parçacık eğri üzerinde hareket ettikçe büyüklüğü ve yönü değiştiğinden, bu vektör zamanın bir fonksiyonudur.
41 12.3 Genel Eğrisel Hareket Yer Değiştirme. Küçük bir Δt zaman aralığında, parçacığın eğri üzerinde Δs yolu alarak r = r + Δr ile tanımlanan yeni konumuna geldiğini varsayalım. Δr yer değiştirmesi parçacığın konumundaki değişimi gösterir ve vektör farkı ile belirlenir; Δr = r r. Yer Değiştirme
42 12.3 Genel Eğrisel Hareket Hız. Ortalama Hız Anlık Hız Hızın şiddeti Yer Değiştirme Hız
43 12.3 Genel Eğrisel Hareket İvme. Ortalama İvme Anlık İvme Hodograf Hodograf Zamana bağlı değişimi incelemek için iki hız vektörü, başlangıçları O sabit noktasında, ok uçları eğrinin üzerinde olacak şekilde çizilmiştir. Bu eğriye hodograf denir. v her zaman yörüngeye teğettir ve a her zaman hodografa teğettir. İvme Yol
44 12.4 Eğrisel Hareket: Dik Bileşenler Bazen bir parçacığın hareketi, en iyi, sabit x, y, z referans sistemi kullanılarak gösterilen bir yörünge üzerinde tanımlanabilir. Konum. Verilen bir anda P parçacığı s eğrisel yolu üzerinde (x, y, z) noktasında ise parçacığın konumu, konum vektörü r = r(t) ile tanımlanır. x = x(t), y = y(t), z = z(t) dir. r nin büyüklüğü daima pozitiftir.
45 12.4 Eğrisel Hareket: Dik Bileşenler Hız. r nin zamana göre birinci türevi parçacığın v hızını verir.
46 12.4 Eğrisel Hareket: Dik Bileşenler İvme. Bir parçacığın hızının zamana göre birinci türevi, ivmeyi verir.
47 Örnek 12-9 Şekildeki meteoroloji balonunun yatay konumu herhangi bir anda, t saniye cinsinden verilmek üzere, x = (9t) m ile tanımlanıyor. Yörünge denklemi y = x 2 /30 ile verildiğine göre, t = 2 s iken (a) balonun A daki istasyon uzaklığını, (b) hız vektörünün doğrultu ve büyüklüğünü ve (c) ivme vektörünün doğrultu ve büyüklüğünü belirleyiniz.
48 Örnek 12-9 Konum. Hız.
49 Örnek 12-9 İvme.
50 Örnek B kutusunun hareketi, t saniye, sinüs ve kosinüs argümanları radyan cinsinden verilmek üzere, aşağıdaki konum vektörü ile tanımlanıyor. t = 0.75 s iken kutunun konumunu, hız ve ivme vektörlerinin büyüklüğünü belirleyiniz.
51 Örnek Konum.

52 Örnek Hız. İvme.
53 12.5 Mermi Hareketi Bir merminin serbest uçuş hareketi, merminin ivmesi daima düşey doğrultuda olduğundan, çoğu kez dik bileşenler cinsinden incelenir. Hava direnci ihmal edildiğinde mermiye etkiyen tek kuvvet, merminin ağırlığıdır.

54 12.5 Mermi Hareketi Ardışık her resim eşit zaman aralıklarında çekilmiştir. Kırmızı top serbest düşme hareketi yaparken sarı top bırakıldığı anda yatay bir hıza sahiptir. İki top da aşağıya doğru aynı oranda ivmelenirler. Dolayısıyla, her bir anda aynı yüksekliktedirler. İvme nedeniyle aşağıya doğru inildikçe, resimler arasındaki aralık artmaktadır. Bununla birlikte, yatay hız sabit olduğu için, farklı anlarda sarı topun aldığı yatay mesafe değişmez.
55 12.5 Mermi Hareketi Yatay hareket. Düşey hareket.
56 Örnek Bir çuval 12 m/s lik bir yatay hızla bir rampadan aşağıya kaymaktadır. Rampanın yerden yüksekliği 6 m olduğuna göre, çuvalın döşemeye çarpması için gerekli zamanı ve çuvalların yığılmaya başladığı alanın R genişliğini belirleyiniz.

57 Örnek Koordinat Sistemi. Düşey Hareket. Yatay Hareket.
58 Örnek Talaş makinesi talaşları v0 = 7.5 m/s ile fırlatmak üzere tasarlanmıştır. Boru yatayla 30 yapıyorsa ve talaşlar yığına borudan 6 m uzaklıkta ulaşıyorsa, yığına hangi h yüksekliğinde çarptıklarını belirleyiniz.

59 Örnek Koordinat Sistemi. Yatay Hareket. Düşey Hareket.
60 Örnek A noktasında topa vurulduğunda, B noktasını maksimum yüksekliğe ulaşarak aştığı gözlemlenmiştir. A dan duvara olan uzaklığın 20 m ve duvarın yüksekliğinin 4 m olduğunu göz önüne alarak, topun ayaktan çıktığı andaki başlangıç hızını belirleyiniz. Topun boyutlarını ihmal ediniz.
61 Örnek Yatay Hareket. Düşey Hareket.
62 12.6 Eğrisel Hareket: Normal ve Teğetsel Bileşenler Bir parçacığın izlediği yol biliniyorsa, hareketi, göz önüne alınan anda orijini parçacıkla çakışan ve yola sırasıyla normal ve teğet olarak etkiyen n ve t koordinatlarını kullanarak tanımlamak uygundur. Düzlemsel Hareket. t ekseni P de eğriye teğettir. Normal eksenin yönünün seçimi eğrinin ds diferansiyel yay parçalarından oluştuğu düşünülerek yapılabilir. n ve t eksenlerinin bulunduğu düzlem, oskülatör düzlem olarak adlandırılır. P
63 12.6 Eğrisel Hareket: Normal ve Teğetsel Bileşenler Hız. Parçacık hareket ettiğinden, s zamanın bir fonksiyonudur. Parçacığın v hız vektörü, daima yola teğettir ve yol fonksiyonunun zamana göre türevi alınarak belirlenen v = ds/dt büyüklüğüne sahiptir. P
64 12.6 Eğrisel Hareket: Normal ve Teğetsel Bileşenler İvme. Parçacığın ivme vektörü, hız vektörünün zamana göre değişim oranıdır. P
65 12.6 Eğrisel Hareket: Normal ve Teğetsel Bileşenler 1. Parçacık, bir doğru boyunca hareket ediyorsa, ρ olur ve an = 0 bulunur. Böylece, a=at=v olur. Yani, ivmenin teğetsel bileşeni, hızın büyüklüğünün zamana göre değişim oranını ifade eder. 2. Parçacık, sabit hızla bir eğri boyunca hareket ediyorsa, at =v = 0 ve a=an=v 2 /ρ olur. Yani, ivmenin normal bileşeni, hızın doğrultusunun zamana göre değişim oranını ifade eder. Bu bileşen, daima eğrilik merkezine doğru etkidiğinden, merkezcil ivme olarak da adlandırılır. İlerleme yönü Hızın doğrultusundaki değişim Hızın büyüklüğündeki değişim

66 12.6 Eğrisel Hareket: Normal ve Teğetsel Bileşenler Üç Boyutlu Hareket. Parçacık bir uzay eğrisi boyunca hareket ediyorsa, düzlemsel hareketteki gibi, P den O eğrilik merkezine yönlenen eksen, pozitif n ekseni olarak seçilebilir. Bu eksene, eğrinin P deki asal normali denir. ut ve un daima dik oldukları ve oskülatör düzlemde bulundukları için, ub, ut ve un ye dik olan b binormal eksenini tanımlar. Üç birim vektör birbirine vektörel çarpım ile bağlıdır. Örneğin, ub = ut x un. Oskülatör düzlem
67 Örnek Bir kayakçının, y = 1/20 x 2 parabolik yolu üzerindeki hızı 2 m/s 2 oranında artmaktadır ve A noktasına ulaştığında hızı 6 m/s dir. Kayakçının A ya ulaştığı andaki hızının doğrultusu ile ivmesinin büyüklüğünü ve doğrultusunu belirleyiniz. Kayakçının boyutlarını ihmal ediniz.

68 Örnek Hız. İvme.
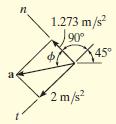
69 Örnek C yarış otomobili, 90 m yarıçaplı yatay dairesel bir pisti dolanmaktadır. Otomobil, durağan halden başlayarak hızını 2.1 m/s 2 lik sabit bir oranda arttırırsa, ivmesinin 2.4 m/s 2 ye ulaşması için gereken zamanı belirleyiniz. Otomobilin o andaki hızı nedir?
70 Örnek İvme. Hız.
 m/s 2 dir.")
71 Örnek Bir kutu A noktasında hızsız harekete başlamakta ve yatay taşıyıcı bant boyunca ilerlemektedir. Hareket esnasında hızdaki artış, t saniye cinsinden olmak üzere, at = (0.2t) m/s 2 dir. Kutunun B noktasına ulaştığı andaki ivmesinin büyüklüğünü belirleyiniz.

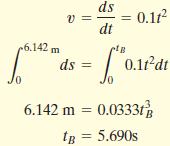
72 Örnek İvme.
73 12.7 Eğrisel Hareket: Silindirik Bileşenler Bazı mühendislik problemlerinde, bir parçacığın yörüngesini r, θ ve z silindirik koordinatları cinsinden ifade etmek uygundur. Hareket düzleme kısıtlanmışsa, r, θ kutupsal (polar) koordinatları kullanılır. Kutupsal Koordinatlar. Parçacığın konumu, r radyal koordinatı ve θ enine koordinatı ile belirlenebilir. r ve θ koordinatlarının pozitif doğrultuları, sırasıyla, ur ve uθ ile tanımlanır. Bu doğrultular birbirine diktir. Konum. Herhangi bir anda parçacığın konumu: Konum P
74 12.7 Eğrisel Hareket: Silindirik Bileşenler Hız. v anlık hızı, r nin zamana göre türevi alınarak elde edilir: θ = dθ/dt terimine açısal hız denir, çünkü θ açısının zamana bağlı değişiminin ölçüsüdür. Genellikle rad/s birimi kullanılır. Hız P
75 12.7 Eğrisel Hareket: Silindirik Bileşenler İvme. terimine açısal ivme denir, çünkü belli bir zaman aralığında açısal hızın değişiminin ölçüsüdür. Genellikle rad/s 2 birimi kullanılır. İvme P

76 12.7 Eğrisel Hareket: Silindirik Bileşenler Silindirik Koordinatlar. Parçacık bir uzay eğrisi boyunca hareket ediyorsa, konumu r, θ, z silindirik koordinatları ile belirlenebilir. Parçacığın konum, hız ve ivmesi silindirik koordinatlar cinsinden: P
77 12.7 Eğrisel Hareket: Silindirik Bileşenler Zamana Göre Türevler. Kinematik denklemler, v ve a nın r ve θ bileşenlerini hesaplamak için zamana göre r, r, θ ve θ türevlerini bulmamızı gerektirir. 1. Koordinatlar zaman parametreli r = r(t) ve θ = θ(t) denklemleri ile belirlenirse, zamana göre türevler doğrudan bulunabilir.
78 12.7 Eğrisel Hareket: Silindirik Bileşenler Zamana Göre Türevler. 2. Zaman parametreli denklemler verilmiyorsa, r = f(θ) yörüngesini belirlemek ve kalkülüsün zincir kuralı kullanılarak zamana göre türevler arasındaki bağıntıyı bulmak gerekir.
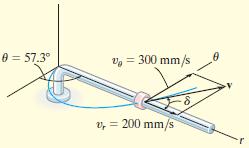
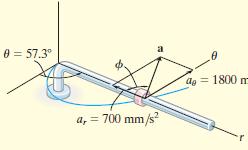
79 Örnek Şekildeki lunapark aleti, r yarıçaplı yatay dairesel yörünge üzerinde dönen bir koltuktan oluşur ve OB kolu, θ açısal hızına ve θ açısal ivmesine sahiptir. Koltuktaki kişinin hızının ve ivmesinin radyal ve enine bileşenlerini belirleyiniz. Boyutları ihmal ediniz.

80 Örnek Hız ve İvme.
81 Örnek OA çubuğu, θ = (t 3 ) rad olacak şekilde yatay düzlemde dönmektedir. Aynı zamanda, B bileziği, r = (100t 2 ) mm olmak üzere, OA boyunca dışarıya doğru kaymaktadır. Her iki denklemde t saniye cinsinden olduğuna göre, t = 1 s iken bileziğin hız ve ivmesini belirleyiniz.

82 Örnek Hız ve İvme.
83 Örnek Şekildeki projektör, 100 m uzaktaki duvar yüzeyine bir ışık demeti göndermektedir. θ = 45 iken ışık demetinin duvar üzerindeki hareketinin hızının ve ivmesinin büyüklüğünü hesaplayınız. Projektör sabit θ = 4 rad/s hızıyla dönmektedir.

84 Örnek Hız ve İvme.

85 Örnek Hız ve İvme.
86 Örnek Şekildeki silindirik çivi, çatal çubuğun dönmesi sonucu, bir parçası r = 0.15(1-cosθ) m denklemli kardiyoid şeklinde olan oluklu yol etrafında ilerlemektedir. Burada θ radyan cinsindendir. Çivinin, θ = 180 anındaki hızı v = 1.2 m/s ve ivmesi a = 9 m/s2 olduğuna göre, çatalın θ açısal hızını ve θ açısal ivmesini belirleyiniz.
87 Örnek Hız ve İvme.

88 12.8 İki Parçacığın Mutlak Bağımlı Hareket Analizi Bazı problem tiplerinde, bir parçacığın hareketi bir başka parçacığın karşı gelen hareketine bağımlı olur. Bu bağımlılık, genellikle parçacıkların makaralardan dolandırılmış uzamayan iplerle birbirine bağlanması durumunda ortaya çıkar. Başlangıç çizgisi Başlangıç çizgisi
89 12.8 İki Parçacığın Mutlak Bağımlı Hareket Analizi Başlangıç çizgisi Başlangıç çizgisi Başlangıç çizgisi Başlangıç çizgisi Başlangıç çizgisi
90 Örnek Şekildeki B bloğu yukarıya doğru sabit 2 m/s hızına sahip olduğuna göre, A bloğunun hızını belirleyiniz.
91 Örnek 12-21
92 Örnek Şekildeki B bloğu yukarıya doğru sabit 2 m/s hızına sahip olduğuna göre, A bloğunun hızını belirleyiniz.

93 Örnek 12-22
94 Örnek Başlangıç çizgisi İpin A daki ucu 2 m/s hızla çekiliyorsa, B bloğunun yükselme hızını belirleyiniz.

95 Örnek Başlangıç çizgisi
96 Örnek A daki adam va = 0.5 m/s sabit hızıyla sağa doğru yürüyerek bir S kasasını yukarı çekmektedir. Kasanın E deki pencere seviyesine geldiği andaki hızını ve ivmesini belirleyiniz. İpin uzunluğu 30 m dir ve D deki küçük bir makaranın üzerinden geçmektedir.

97 Örnek 12-24
98 12.9 İki Parçacığın Bağıl Hareketinin Ötelenen Eksenler ile Analizi Bir çok durumda, parçacığın hareketinin yörüngesi çok karmaşıktır ve iki veya daha fazla referans sistemi kullanarak, hareketi kısımlara ayırıp analiz etmek daha uygun olabilir. Konum. ra ve rb mutlak konumları sabit referans sisteminin orijininden ölçülür. İkinci referans sistemi A ya bağlıdır. Eksenleri dönmez, sabit sisteme göre sadece ötelenir. «B nin A ya göre» bağıl konumu rb/a bağıl konum vektörü yardımıyla gösterilir. Sabit gözlemci Ötelenen gözlemci
99 12.9 İki Parçacığın Bağıl Hareketinin Ötelenen Eksenler ile Analizi Hız. İvme.
100 Örnek km/saat km/saat 60 km/saat lik sabit bir hızla giden bir tren şekildeki gibi bir yol üzerinden geçiyor. A otomobili 45 km/saat hızla yol boyunca ilerlediğine göre, trenin otomobile göre bağıl hızını belirleyiniz.
101 Örnek Çözüm I. Vektör Analizi. km/saat km/saat
102 Örnek Çözüm II. Skaler Analiz. km/saat km/saat
103 Örnek İki uçak aynı yükseklikte uçmakta ve şekilde gösterilen hareketi yapmaktadırlar. A uçağı düz bir yol boyunca buna karşı B uçağı ρb = 400 km yarıçaplı bir dairesel yol boyunca uçuyor. B nin A pilotu tarafından ölçülen hız ve ivmesini belirleyiniz.
104 Örnek Hız. İvme.
105 Örnek Gösterilen anda A ve B arabaları sırasıyla 18 m/s ve 12 m/s hızlarıyla ilerlemektedir. Ayrıca bu anda, A 2 m/s 2 ile yavaşlamakta, B 3 m/s 2 ile hızlanmaktadır. B nin A ya göre hız ve ivmesini belirleyiniz.


106 Örnek Hız. İvme.
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 13 Parçacık Kinetiği: Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 13 Parçacık
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 16 Rijit Cismin Düzlemsel Kinematiği Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 16 Rijit
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
KATI CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ Bu bölümde, düzlemsel kinematik, veya bir rijit cismin düzlemsel hareketinin geometrisi incelenecektir. Bu inceleme, dişli, kam ve makinelerin yaptığı birçok işlemde
DİNAMİK MEKANİK. Şekil Değiştiren Cisimler Mekaniği. Mukavemet Elastisite Teorisi Sonlu Elemanlar Analizi PARÇACIĞIN KİNEMATİĞİ
 DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
DİNAMİK Dinamik mühendislik mekaniği alanının bir alt grubudur: Mekanik: Cisimlerin dış yükler altındaki davranışını inceleyen mühendislik alanıdır. Aşağıdaki alt gruplara ayrılır: MEKANİK Rijit-Cisim
DİNAMİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
DİNAMİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ: ÖTELENME&DÖNME Bugünün
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
MADDESEL NOKTANIN EĞRİSEL HAREKETİ
 Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Silindirik Koordinatlar: Bazı mühendislik problemlerinde, parçacığın hareketinin yörüngesi silindirik koordinatlarda r, θ ve z tanımlanması uygun olacaktır. Eğer parçacığın hareketi iki eksende oluşmaktaysa
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
MADDESEL NOKTALARIN DİNAMİĞİ
 MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
MÜHENDİSLİK MEKANİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ DİNAMİK MADDESEL NOKTALARIN DİNAMİĞİ İÇİNDEKİLER 1. GİRİŞ - Konum, Hız ve İvme - Newton Kanunları 2. MADDESEL NOKTALARIN KİNEMATİĞİ - Doğrusal
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
DİNAMİK Ders_3. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
DİNAMİK Ders_3 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ EĞRİSEL HAREKET: SİLİNDİRİK BİLEŞENLER Bugünün Hedefleri:
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 14 Parçacık Kinetiği: İş ve Enerji Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 14 Parçacık
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017
 Bölümü Dinamik Dersi (Türkçe Dilinde) 1. Çalişma Soruları / 24 Eylül 2017") SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
SORU-1) Dirençli bir ortamda doğrusal hareket yapan bir parçacığın ivmesi a=k V 3 olarak tanımlanmıştır. Burada k bir sabiti, V hızı, x konumu ve t zamanı sembolize etmektedir. Başlangıç koşulları x o
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
Hareket Kanunları Uygulamaları
 Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Fiz 1011 Ders 6 Hareket Kanunları Uygulamaları Sürtünme Kuvveti Dirençli Ortamda Hareket Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ Sürtünme Kuvveti Çevre faktörlerinden dolayı (hava,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Dinamik. Fatih ALİBEYOĞLU -10-
 1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
1 Dinamik Fatih ALİBEYOĞLU -10- Giriş & Hareketler 2 Rijit cismi oluşturan çeşitli parçacıkların zaman, konum, hız ve ivmeleri arasında olan ilişkiler incelenecektir. Rijit Cisimlerin hareketleri Ötelenme(Doğrusal,
Bölüm-4. İki Boyutta Hareket
 Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Bölüm-4 İki Boyutta Hareket Bölüm 4: İki Boyutta Hareket Konu İçeriği 4-1 Yer değiştirme, Hız ve İvme Vektörleri 4-2 Sabit İvmeli İki Boyutlu Hareket 4-3 Eğik Atış Hareketi 4-4 Bağıl Hız ve Bağıl İvme
Fizik 101-Fizik I 2013-2014. Dönme Hareketinin Dinamiği
 -Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
-Fizik I 2013-2014 Dönme Hareketinin Dinamiği Nurdan Demirci Sankır Ofis: 364, Tel: 2924332 İçerik Vektörel Çarpım ve Tork Katı Cismin Yuvarlanma Hareketi Bir Parçacığın Açısal Momentumu Dönen Katı Cismin
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 15 Parçacık Kinetiği: İmpuls ve Momentum Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 15 Parçacık
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
1. STATİĞE GİRİŞ 1.1 TANIMLAR MEKANİK RİJİT CİSİMLER MEKANİĞİ ŞEKİL DEĞİŞTİREN CİSİMLER AKIŞKANLAR MEKANİĞİ DİNAMİK STATİK
 STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
STATİK Ders Notları Kaynaklar: 1.Engineering Mechanics: Statics, 9e, Hibbeler, Prentice Hall 2.Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige 1. STATİĞE GİRİŞ 1.1 TANIMLAR
Doç.Dr. Cesim ATAŞ MEKANİK ŞEKİL DEĞİŞTİREN CİSİMLER MEKANİĞİ DİNAMİK
 STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
STATİK (Ders Notları) Kaynak: Engineering Mechanics: Statics, SI Version, 6th Edition, J. L. Meriam, L. G. Kraige, Wiley Yardımcı Kaynak: Mühendislik Mekaniği: Statik, R.C Hibbeler & S.C. Fan, Literatür
Fizik Dr. Murat Aydemir
 Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
Fizik-1 2017-2018 Dr. Murat Aydemir Ankara University, Physics Engineering, Bsc Durham University, Physics, PhD University of Oxford, Researcher, Post-Doc Ofis No: 35 Merkezi Derslikler Binasi murat.aydemir@erzurum.edu.tr
DİNAMİK (2.hafta) Yatay Hareket Formülleri: a x =0 olduğundan ilk hız ile yatay bileşende hareketine devam eder.
 Yatay Hareket Formülleri: a x =0 olduğundan ilk hız ile yatay bileşende hareketine devam eder.") EĞİK ATIŞ Bir merminin serbest uçuş hareketi iki dik bileşen şeklinde, yatay ve dikey hareket olarak incelenir. Bu harekette hava direnci ihmal edilerek çözüm yapılır. Hava direnci ihmal edilince yatay
EĞİK ATIŞ Bir merminin serbest uçuş hareketi iki dik bileşen şeklinde, yatay ve dikey hareket olarak incelenir. Bu harekette hava direnci ihmal edilerek çözüm yapılır. Hava direnci ihmal edilince yatay
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 3 Parçacık Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 3 Parçacık Dengesi Bu bölümde,
MEKANİZMA TEKNİĞİ (3. Hafta)
") MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
MEKANİZMALARIN KİNEMATİK ANALİZİ Temel Kavramlar MEKANİZMA TEKNİĞİ (3. Hafta) Bir mekanizmanın Kinematik Analizinden bahsettiğimizde, onun üzerindeki tüm uzuvların yada istenilen herhangi bir noktanın
HAREKET HAREKET KUVVET İLİŞKİSİ
 HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
HAREKET HAREKET KUVVET İLİŞKİSİ Sabit kabul edilen bir noktaya göre bir cismin konumundaki değişikliğe hareket denir. Bu sabit noktaya referans noktası denir. Fizikte hareket üçe ayrılır Ötelenme Hareketi:
FIZ Uygulama Vektörler
 Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
Vektörler Problem 1 - Serway 61/75 Bir dikdörtgenler prizmasının boyutları şekildeki gibi a=10,0 cm, b=20,0 cm ve c=15,0 cm dir. a) Yüz köşegen vektörü R 1 nedir? b) Cisim köşegen vektörü R 2 nedir? c)
DİNAMİK Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
DİNAMİK - 11 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 11. HAFTA Kapsam: İmpuls Momentum yöntemi İmpuls ve momentum ilkesi
HAREKETİN KİNEMATİK İNCELENMESİ
 HAREKETİN KİNEMATİK İNCELENMESİ Kinematik, cisimlerin hareketlerini, bu hareketlere neden olan ya da bu hareketler sonucunda oluşan kuvvetlerden bağımsız olarak inceleyen fizik dalıdır. Klasik mekaniğin
HAREKETİN KİNEMATİK İNCELENMESİ Kinematik, cisimlerin hareketlerini, bu hareketlere neden olan ya da bu hareketler sonucunda oluşan kuvvetlerden bağımsız olarak inceleyen fizik dalıdır. Klasik mekaniğin
KOÜ. Mühendislik Fakültesi Makine Mühendisliği ( 1. ve 2. Öğretim ) Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018
 Bölümü Dinamik Dersi (Türkçe Dilinde) 2. Çalişma Soruları / 21 Ekim 2018") SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
SORU-1) Şekilde gösterilen uzamasız halat makara sisteminde A'daki ipin ucu aşağı doğru 1 m/s lik bir hızla çekilirken, E yükünün hızının sayısal değerini ve hareket yönünü sistematik bir şekilde hesaplayarak
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
VERİLER Yer çekimi ivmesi : g=10 m/s 2 Metrik Ön Takılar sin 45 = cos 45 = 0,7 Numara Ön Takı Simge sin 37 = cos 53 = 0,6 sin 53 = cos 37 = 0,8 10 9 giga G tan 37 = 0,75 10 6 mega M tan 53 = 1,33 10 3
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Bir boyutta sabit ivmeli hareket..
 Bir boyutta sabit ivmeli hareket.. İvme sabit olduğunda, ortalama ivme ani ivmeye eşit olur. Hız hareketin başından sonuna kadar aynı oranda artar veya azalır. a x = v xf v xi t ; t i = 0 ve t f = t alınmıştır
Bir boyutta sabit ivmeli hareket.. İvme sabit olduğunda, ortalama ivme ani ivmeye eşit olur. Hız hareketin başından sonuna kadar aynı oranda artar veya azalır. a x = v xf v xi t ; t i = 0 ve t f = t alınmıştır
DİNAMİK - 2. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu. Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
Fiz Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi
 Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Fiz 1011 - Ders 10 Katı Cismin Sabit Bir Eksen Etrafında Dönmesi Açısal Yerdeğiştirme, Hız ve İvme Dönme Kinematiği: Sabit Açısal İvmeli Dönme Hareketi Açısal ve Doğrusal Nicelikler Dönme Enerjisi Eylemsizlik
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Newton un II. yasası. Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır.
 Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
Newton un II. yasası Bir cismin ivmesi, onun üzerine etki eden bileşke kuvvetle doğru orantılı ve kütlesi ile ters orantılıdır. Bir cisme F A, F B ve F C gibi çok sayıda kuvvet etkiyorsa, net kuvvet bunların
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
DİNAMİK. Ders_2. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_2 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ EĞRİSEL HAREKET: GENEL TANIM VE DİK BİLEŞENLER Bugünün hedefleri:
DİNAMİK Ders_2 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ EĞRİSEL HAREKET: GENEL TANIM VE DİK BİLEŞENLER Bugünün hedefleri:
Fizik 101-Fizik I 2013-2014. Nurdan Demirci Sankır Enerji Araştırmaları Laboratuarı- YDB Bodrum Kat Ofis: 325, Tel:4332. İçerik
 Fizik 101-Fizik I 2013-2014 İki Boyutta Hareket Nurdan Demirci Sankır Enerji Araştırmaları Laboratuarı- YDB Bodrum Kat Ofis: 325, Tel:4332 İçerik Yerdeğiştirme, hız ve ivme vektörleri Sabit ivmeli iki-boyutlu
Fizik 101-Fizik I 2013-2014 İki Boyutta Hareket Nurdan Demirci Sankır Enerji Araştırmaları Laboratuarı- YDB Bodrum Kat Ofis: 325, Tel:4332 İçerik Yerdeğiştirme, hız ve ivme vektörleri Sabit ivmeli iki-boyutlu
DENEY 1. İncelenmesi. Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi
 DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
DENEY 1 Düzgün Doğrusal Hareketin İncelenmesi Süleyman Demirel Üniversitesi Fen Edebiyat Fakültesi Fizik Bölümü Isparta - 2018 Amaçlar 1. Tek boyutta hareket kavramının incelenmesi. 2. Yer değiştirme ve
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Newton un ikinci yasası: Bir cisim ivmesi cisim üzerine etki eden toplam kuvvet ile doğru orantılı cismin kütlesi ile ters orantılıdır.
 Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
Bölüm 5: Hareket Yasaları(Özet) Önceki bölümde hareketin temel kavramları olan yerdeğiştirme, hız ve ivme tanımlanmıştır. Bu bölümde ise hareketli cisimlerin farklı hareketlerine sebep olan etkilerin hareketi
3-1 Koordinat Sistemleri Bir cismin konumunu tanımlamak için bir yönteme gereksinim duyarız. Bu konum tanımlaması koordinat kullanımı ile sağlanır.
 Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bölüm 3 VEKTÖRLER Bölüm 3: Vektörler Konu İçeriği Sunuş 3-1 Koordinat Sistemleri 3-2 Vektör ve Skaler nicelikler 3-3 Vektörlerin Bazı Özellikleri 3-4 Bir Vektörün Bileşenleri ve Birim Vektörler Sunuş Fizikte
Bir cismin iki konumu arasındaki vektörel uzaklıktır. Başka bir ifadeyle son konum (x 2 ) ile ilk konum
 ile ilk konum") DOĞRUSAL ve BAĞIL HAREKET Hareket Maddelerin zamanla yer değiştirmesine hareket denir. Fakat cisimlerin nereye göre yer değiştirdiği ve nereye göre hareket ettiği belirtilmelidir. Örneğin at üstünde giden
DOĞRUSAL ve BAĞIL HAREKET Hareket Maddelerin zamanla yer değiştirmesine hareket denir. Fakat cisimlerin nereye göre yer değiştirdiği ve nereye göre hareket ettiği belirtilmelidir. Örneğin at üstünde giden
KATI CİSİMLERİN BAĞIL İVME ANALİZİ:
 KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
KATI CİSİMLERİN BAĞIL İVME ANALİZİ: Genel düzlemsel hareket yapmakta olan katı cisim üzerinde bulunan iki noktanın ivmeleri aralarındaki ilişki, bağıl hız v A = v B + v B A ifadesinin zamana göre türevi
r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s
![r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s](/thumbs/55/37178256.jpg "r r s r i (1) = [x(t s ) x(t i )]î + [y(t s ) y(t i )]ĵ. (2) r s") Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
Bölüm 4: İki-Boyutta Hareket(Özet) Bir-boyutta harekeçin geliştirilen tüm kavramlar iki-boyutta harekeçin genelleştirilebilir. Bunun için hareketli cismin(parçacığın) yer değiştirme vektörü xy-düzleminde
Düzgün olmayan dairesel hareket
 Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
Düzgün olmayan dairesel hareket Dairesel harekette cisim üzerine etki eden net kuvvet merkeze doğru yönelmişse cismin hızı sabit kalır. Eğer net kuvvet merkeze doğru yönelmemişse, kuvvet teğetsel ve radyal
TİTREŞİM VE DALGALAR BÖLÜM PERİYODİK HAREKET
 TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir.
DİNAMİK. Ders_10. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
DİNAMİK Ders_10 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2018-2019 GÜZ RÖLATİF DÖNME ANALİZİ:HIZ Bugünün Hedefleri: 1. Ötelenme
İş-Kinetik Enerji, Potansiyel Enerji, Enerji Korunumu
 İş-Kinetik Enerji, Potansiyel Enerji, Enerji Korunumu 1. Kütlesi 7 kg olan motorsuz oyuncak bir araba, sürtünmesiz yatay bir düzlem üzerinde 4 m/s ilk hız ile gitmektedir. Araba daha sonra ilk hızı ile
İş-Kinetik Enerji, Potansiyel Enerji, Enerji Korunumu 1. Kütlesi 7 kg olan motorsuz oyuncak bir araba, sürtünmesiz yatay bir düzlem üzerinde 4 m/s ilk hız ile gitmektedir. Araba daha sonra ilk hızı ile
DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) A-Polar Koordinatlarda (r,θ) Hareket Denkemleri
 EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) A-Polar Koordinatlarda (r,θ) Hareket Denkemleri") DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) Şekildeki gibi dönen bir çubuk üzerinde ilerleyen bilezik hem dönme hareketi hemde merkezden uzaklaşma hareketi yapar. Bu durumda
DİNAMİK (3.hafta) EĞRİSEL HAREKET-2: Kutupsal /Polar Koordinatlar (r,θ) Şekildeki gibi dönen bir çubuk üzerinde ilerleyen bilezik hem dönme hareketi hemde merkezden uzaklaşma hareketi yapar. Bu durumda
Fizik-1 UYGULAMA-7. Katı bir cismin sabit bir eksen etrafında dönmesi
 Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
Fizik-1 UYGULAMA-7 Katı bir cismin sabit bir eksen etrafında dönmesi 1) Bir tekerlek üzerinde bir noktanın açısal konumu olarak verilmektedir. a) t=0 ve t=3s için bu noktanın açısal konumunu, açısal hızını
ÖDEV SETİ 4. 1) Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir.
 Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir.") ÖDEV SETİ 4 1) Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir. 2) a) 3 kg lık b) 7 kg lık blok iki ip ile şekildeki gibi bağlanıyor, iplerdeki gerilme
ÖDEV SETİ 4 1) Aşağıda verilen şekillerde her bir blok 5 kg olduğuna göre yaylı ölçekte ölçülen değerler kaç N dir. 2) a) 3 kg lık b) 7 kg lık blok iki ip ile şekildeki gibi bağlanıyor, iplerdeki gerilme
KUVVET, MOMENT ve DENGE
 2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
2.1. Kuvvet 2.1.1. Kuvvet ve cisimlere etkileri Kuvvetler vektörel büyüklüklerdir. Kuvvet vektörünün; uygulama noktası, kuvvetin cisme etkidiği nokta; doğrultu ve yönü, kuvvetin doğrultu ve yönü; modülüyse
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Öğr. Gör. Serkan AKSU
 Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Öğr. Gör. Serkan AKSU www.serkanaksu.net İki nokta arasındaki yerdeğiştirme, bir noktadan diğerine yönelen bir vektördür, ve bu vektörün büyüklüğü, bu iki nokta arasındaki doğrusal uzaklık olarak alınır.
Fizik 101-Fizik I
 Fizik 101-Fizik I 2013-2014 Dairesel Hareket ve Newton Kanunlarının Diğer Uygulamaları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Newton nun İkinci Yasasının Düzgün Dairesel Harekete Uygulanması Sabit hızla
Fizik 101-Fizik I 2013-2014 Dairesel Hareket ve Newton Kanunlarının Diğer Uygulamaları Nurdan Demirci Sankır Ofis: 325, Tel:4331 Newton nun İkinci Yasasının Düzgün Dairesel Harekete Uygulanması Sabit hızla
V = g. t Y = ½ gt 2 V = 2gh. Serbest Düşme NOT:
 Havada serbest bırakılan cisimlerin aşağı doğru düşmesi etrafımızda her zaman gördüğümüz bir olaydır. Bu düşme hareketleri, cisimleri yerin merkezine doğru çeken bir kuvvetin varlığını gösterir. Daha önceki
Havada serbest bırakılan cisimlerin aşağı doğru düşmesi etrafımızda her zaman gördüğümüz bir olaydır. Bu düşme hareketleri, cisimleri yerin merkezine doğru çeken bir kuvvetin varlığını gösterir. Daha önceki
Kinematik. FİZ1011 : Ders 4. İki ve Üç Boyutta Hareket. Yerdeğiştirme, Hız ve İvme Vektörleri. Teğetsel ve Radyal İvme. Eğik Atış Hareketi
 FİZ1011 : Ders 4 Kinematik İki ve Üç Boyutta Hareket Yerdeğiştirme, Hız ve İvme Vektörleri Teğetsel ve Radyal İvme Eğik Atış Hareketi Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ İki
FİZ1011 : Ders 4 Kinematik İki ve Üç Boyutta Hareket Yerdeğiştirme, Hız ve İvme Vektörleri Teğetsel ve Radyal İvme Eğik Atış Hareketi Düzgün Dairesel Hareket http://kisi.deu.edu.tr/mehmet.tarakci/ İki
MIM 210 DİNAMİK DERSİ DERS NOTU
 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği:
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ MIM 210 DİNAMİK DERSİ DERS NOTU Hazırlayan Dr. Osman TURAN Kaynaklar 1. J.L. MERIAM ve L.G. KRAIGE, Mühendislik Mekaniği:
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü
 Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
Massachusetts Teknoloji Enstitüsü-Fizik Bölümü Fizik 8.01 Ödev # 7 Güz, 1999 ÇÖZÜMLER Dru Renner dru@mit.edu 7 Kasım 1999 Saat: 21.50 Problem 7.1 (Ohanian, sayfa 271, problem 55) Bu problem boyunca roket
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji)
") KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
KATI CİSMİN DÜZLEMSEL KİNETİĞİ (Kinetik Enerji) Partikülün kinetiği bahsinde, hız ve yer değiştirme içeren problemlerin iş ve enerji prensibini kullanarak kolayca çözülebildiği söylenmişti. Ayrıca, kuvvet
GÜZ YARIYILI FİZİK 1 DERSİ
 2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) 1 Bölüm 3 İKİ BOYUTTA HAREKET 2 İçerik Yerdeğistirme,
2015-2016 GÜZ YARIYILI FİZİK 1 DERSİ Yrd. Doç. Dr. Hakan YAKUT SAÜ Fen Edebiyat Fakültesi Fizik Bölümü Ofis: FEF A Blok, 812 nolu oda Tel.: +90 264 295 (6092) 1 Bölüm 3 İKİ BOYUTTA HAREKET 2 İçerik Yerdeğistirme,
Metrik sistemde uzaklık ve yol ölçü birimi olarak metre (m) kullanılır.
 kullanılır.") LİNEAR (DÜZGÜN DOĞRUSAL) BİOKİNEMATİK ÖZELLİKLER Düzgün doğrusal hareket bir cismin düz bir doğrultuda ilerlemesi, yer değiştirmesidir. Uzunluk, hız, ivmelenme bu bölümde incelenir. Yol-Uzaklık kavramları:
LİNEAR (DÜZGÜN DOĞRUSAL) BİOKİNEMATİK ÖZELLİKLER Düzgün doğrusal hareket bir cismin düz bir doğrultuda ilerlemesi, yer değiştirmesidir. Uzunluk, hız, ivmelenme bu bölümde incelenir. Yol-Uzaklık kavramları:
Bölüm 3: Vektörler. Kavrama Soruları. Konu İçeriği. Sunuş. 3-1 Koordinat Sistemleri
 ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
ölüm 3: Vektörler Kavrama Soruları 1- Neden vektörlere ihtiyaç duyarız? - Vektör ve skaler arasındaki fark nedir? 3- Neden vektörel bölme işlemi yapılamaz? 4- π sayısı vektörel mi yoksa skaler bir nicelik
VERİLER. Yer çekimi ivmesi : g=10 m/s 2
 VERİER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin 4 = cos 4 = 0,7 Rakam Ön Takı Simge sin 7 = cos = 0,6 sin = cos 7 = 0,8 10 9 giga G tan 7 = 0,7 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo
VERİER Yer çekimi ivmesi : g=10 m/s Metrik Ön Takılar sin 4 = cos 4 = 0,7 Rakam Ön Takı Simge sin 7 = cos = 0,6 sin = cos 7 = 0,8 10 9 giga G tan 7 = 0,7 10 6 mega M sin 0 = cos 60 = -cos 10 = 0, 10 kilo
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü
 Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Makine Mühendisliği Bölümü MM 2023 Dinamik Dersi 2016 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.) K.T.Ü Makine Müh. Bölümü, Oda No: 320
DENEY 5 DÖNME HAREKETİ
 DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
DENEY 5 DÖNME HAREKETİ AMAÇ Deneyin amacı merkezinden geçen eksen etrafında dönen bir diskin dinamiğini araştırmak, açısal ivme, açısal hız ve eylemsizlik momentini hesaplamak ve mekanik enerjinin korunumu
Manyetik Alanlar. Benzer bir durum hareketli yükler içinde geçerli olup bu yüklerin etrafını elektrik alana ek olarak bir manyetik alan sarmaktadır.
 Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
Manyetik Alanlar Manyetik Alanlar Duran ya da hareket eden yüklü parçacığın etrafını bir elektrik alanın sardığı biliyoruz. Hatta elektrik alan konusunda şu sonuç oraya konulmuştur. Durgun bir deneme yükü
2. POTANSİYEL VE KİNETİK ENERJİ 2.1. CİSİMLERİN POTANSİYEL ENERJİSİ. Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir.
 BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
BÖLÜM POTANSİYEL VE KİNETİK ENERJİ. POTANSİYEL VE KİNETİK ENERJİ.1. CİSİMLERİN POTANSİYEL ENERJİSİ Konumundan dolayı bir cismin sahip olduğu enerjiye Potansiyel Enerji denir. Mesela Şekil.1 de görülen
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1
 İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Örnek 1") DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
DİNAMİK (4.hafta) İKİ PARÇACIĞIN BAĞIMLI MUTLAK HAREKETİ (MAKARALAR) Bazı problemlerde bir cismi hareket ettirdiğimizde ona halatla bağlı başka bir cisimde farklı bir konumda hareket edebilir. Bu iki cismin
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ
 KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KİNETİK ENERJİ, İŞ-İŞ ve ENERJİ PRENSİBİ Amaçlar 1. Kuvvet ve kuvvet çiftlerinin yaptığı işlerin tanımlanması, 2. Rijit cisme iş ve enerji prensiplerinin uygulanması. UYGULAMALAR Beton mikserinin iki motoru
KATI CİSMİN DÜZLEMSEL KİNETİĞİ
 KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
KATI CİSMİN DÜZLEMSEL KİNETİĞİ Bu bölümde, düzlemsel levhaların veya düzlem levha gibi davranış sergileyen üç boyutlu cisimlerin hareketi üzerinde durulacaktır. Diğer bir ifadeyle, katı cisim üzerine etki
BÖLÜM I GİRİŞ (1.1) y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)
 y(t) veya y(x) T veya λ. a t veya x. Şekil 1.1 Dalga. a genlik, T peryod (veya λ dalga boyu)") BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
BÖLÜM I GİRİŞ 1.1 Sinyal Bir sistemin durum ve davranış bilgilerini taşıyan, bir veya daha fazla değişken ile tanımlanan bir fonksiyon olup veri işlemde dalga olarak adlandırılır. Bir dalga, genliği, dalga
DOÇ.DR. İBRAHİM SERKAN MISIR GÜZ
 DİNAMİK 1 DİNAMİK DOÇ.DR. İBRAHİM SERKAN MISIR Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ 2 Değerlendirme 1. Ara sınav (%25) 2. Ara sınav (%25) Final (%50) Dönem:26 Eylül 2016
DİNAMİK 1 DİNAMİK DOÇ.DR. İBRAHİM SERKAN MISIR Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2016-2017 GÜZ 2 Değerlendirme 1. Ara sınav (%25) 2. Ara sınav (%25) Final (%50) Dönem:26 Eylül 2016
EĞRİSEL HAREKET : Silindirik Bileşenler
 EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
EĞRİSEL HAREKET : Silindirik Bileşenler SİLİNDİRİK KOORDİNATLARDA (POLAR) HAREKET DENKLEMLERİ Bugünkü Konular: Silindirik koordinat takımı kullanılarak hareket denklemlerinin yazılması; hız ve ivme değerlerinin
Bölüm 9: Doğrusal momentum ve çarpışmalar
 Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Bölüm 9: Doğrusal momentum ve çarpışmalar v hızıyla hareket eden m kütleli bir parçacığın doğrusal momentumu kütle ve hızın çarpımına eşittir; p = mv Momentum vektörel bir niceliktir, yönü hız vektörü
Fiz 1011 I. Vize UYGULAMA
 Fiz 1011 I. Vize UYGULAMA Bölüm 1. Fizik ve Ölçme 1. Aşağıdaki ölçme sonuçlarını 3 anlamlı rakamla gösteriniz. (a) 145,61 (b) 23457 (c) 2,4558 (d) 0,023001 (e) 0,12453 2. Farklı hasaslıkta aletler kullanılarak
Fiz 1011 I. Vize UYGULAMA Bölüm 1. Fizik ve Ölçme 1. Aşağıdaki ölçme sonuçlarını 3 anlamlı rakamla gösteriniz. (a) 145,61 (b) 23457 (c) 2,4558 (d) 0,023001 (e) 0,12453 2. Farklı hasaslıkta aletler kullanılarak
Gök Mekaniği: Eğrisel Hareket in Kinematiği
 Gök Mekaniği: Eğrisel Hareket in Kinematiği Bundan bir önceki giriş yazımızda Kepler yasaları ve Newton ın hareket kanunlarını vermiş, bunlardan yola çıkarak gök mekaniklerini elde edeceğimizi söylemiştik.
Gök Mekaniği: Eğrisel Hareket in Kinematiği Bundan bir önceki giriş yazımızda Kepler yasaları ve Newton ın hareket kanunlarını vermiş, bunlardan yola çıkarak gök mekaniklerini elde edeceğimizi söylemiştik.
Hareket Kanunları. Newton un Hareket Kanunları. Fiz 1011 Ders 5. Eylemsizlik - Newton un I. Yasası. Temel - Newton un II. Yasası
 Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
Fiz 1011 Ders 5 Hareket Kanunları Newton un Hareket Kanunları Eylemsizlik - Newton un I. Yasası Temel - Newton un II. Yasası Etki-Tepki - Newton un III. Yasası http://kisi.deu.edu.tr/mehmet.tarakci/ DİNAMİK
Akışkan Kinematiği 1
 Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Akışkan Kinematiği 1 Akışkan Kinematiği Kinematik, akışkan hareketini matematiksel olarak tanımlarken harekete sebep olan kuvvetleri ve momentleri gözönüne almadan; Yerdeğiştirmeler Hızlar ve İvmeler cinsinden
Karadeniz Teknik Üniversitesi
 Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
Karadeniz Teknik Üniversitesi MHN 243 Sürmene Deniz Bilimleri Fakültesi Gemi İnşaatı ve Gemi Makineleri Mühendisliği Bölümü, Dinamik Dersi 2013-2014 Güz Yarıyılı Dersi Veren: Ömer Necati Cora (Yrd.Doç.Dr.)
Fizik 101: Ders 17 Ajanda
 izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
izik 101: Ders 17 Ajanda Dönme hareketi Yön ve sağ el kuralı Rotasyon dinamiği ve tork Örneklerle iş ve enerji Dönme ve Lineer Kinematik Karşılaştırma açısal α sabit 0 t 1 0 0t t lineer a sabit v v at
TEMEL MEKANİK 4. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
TEMEL MEKANİK 4 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü Ders Kitapları: Mühendisler İçin Vektör Mekaniği, Statik, Yazarlar:
RÖLATİF HAREKET ANALİZİ: İVME
 RÖLATİF HAREKET ANALİZİ: İVME AMAÇLAR: 1. Rijit bir cisim üzerindeki noktanın ivmesini ötelenme ve dönme birleşenlerine ayırmak, 2. Rijit cisim üzerindeki bir noktanın ivmesini rölatif ivme analizi ile
RÖLATİF HAREKET ANALİZİ: İVME AMAÇLAR: 1. Rijit bir cisim üzerindeki noktanın ivmesini ötelenme ve dönme birleşenlerine ayırmak, 2. Rijit cisim üzerindeki bir noktanın ivmesini rölatif ivme analizi ile
KİNEMATİK TEKNOLOJİNİN BİLİMSEL İLKELERİ
 6 KİNEMATİK TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN ( HAREKET BİLGİSİ ) Mekaniğin hareketi açıklayan koluna KĠNEMATĠK denir. Hareket, konumun sürekli değiģimidir. Hareket eden cismi, Ģekil değiģikliği
6 KİNEMATİK TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN ( HAREKET BİLGİSİ ) Mekaniğin hareketi açıklayan koluna KĠNEMATĠK denir. Hareket, konumun sürekli değiģimidir. Hareket eden cismi, Ģekil değiģikliği
Dinamik. Fatih ALİBEYOĞLU -8-
 1 Dinamik Fatih ALİBEYOĞLU -8- Giriş 2 Önceki bölümlerde F=m.a nın maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini kullandık. Hız değişimlerinin yapılan
1 Dinamik Fatih ALİBEYOĞLU -8- Giriş 2 Önceki bölümlerde F=m.a nın maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini kullandık. Hız değişimlerinin yapılan
ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV. ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV
 Türev 2) Türev Uygulamaları TÜREV") - 1 - ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV Kazanım 1 : Türev Kavramını fiziksel ve geometrik uygulamalar yardımıyla açıklar, türevin tanımını
- 1 - ÖĞRENME ALANI TEMEL MATEMATİK BÖLÜM TÜREV ALT ÖĞRENME ALANLARI 1) Türev 2) Türev Uygulamaları TÜREV Kazanım 1 : Türev Kavramını fiziksel ve geometrik uygulamalar yardımıyla açıklar, türevin tanımını
Vektörler Bölüm Soruları 1. İki vektör eşit olmayan büyüklüklere sahiptir. Toplamları sıfır olabilir mi? Açıklayınız.
 Vektörler Bölüm Soruları 1. İki vektör eşit olmayan büyüklüklere sahiptir. Toplamları sıfır olabilir mi? Açıklayınız. 2. Bir parçacığın yerdeğiştirmesinin büyüklüğü, alınan yolun uzunluğundan daha büyük
Vektörler Bölüm Soruları 1. İki vektör eşit olmayan büyüklüklere sahiptir. Toplamları sıfır olabilir mi? Açıklayınız. 2. Bir parçacığın yerdeğiştirmesinin büyüklüğü, alınan yolun uzunluğundan daha büyük
Bölüm 4. İki boyutta hareket
 Bölüm 4 İki boyutta hareket İki boyutta Hareket Burada konum, hız ve ivmenin vektör karakteri daha öne çıkacaktır. İlk olarak sabit ivmeli hareketler göz önünde bulundurulacak. Düzgün dairesel hareket
Bölüm 4 İki boyutta hareket İki boyutta Hareket Burada konum, hız ve ivmenin vektör karakteri daha öne çıkacaktır. İlk olarak sabit ivmeli hareketler göz önünde bulundurulacak. Düzgün dairesel hareket