Y.Doç.Dr. Tarkan SANDALCI TAŞITLARA GİRİŞ
|
|
|
- Aygül Kimyacıoğlu
- 10 yıl önce
- İzleme sayısı:
Transkript
1 TAŞITLARA GİRİŞ

2 Taşıtların Sınıflandırılması L Sınıfı İki ve üç veya dört tekerlekli motorlu araçlardır. L1 Sınıfı: Azami hızı 45 km/s i, içten yanmalı motorlu ise silindir kapasitesi 50 cm³ ü, elektrik motorlu ise azami sürekli nominal güç çıkışı 4 kw ı geçmeyen iki tekerlekli araçtır. L2 Sınıfı: Azami hızı 45 km/s i, kıvılcım ateşlemeli motor ise silindir kapasitesi 50 cm³ ü, içten yanmalı motorlu ise azami net gücü 4 kw ı, elektrik motorlu ise azami sürekli nominal güç çıkışı 4 kw ı geçmeyen üç tekerlekli araçtır. L3 Sınıfı: Azami hızı 45 km/s i ve içten yanmalı motorlu ise silindir kapasitesi 50 cm³ ü geçen yolcu sepetsiz iki tekerlekli araçtır. L4 Sınıfı: Azami hızı 45 km/s i ve içten yanmalı motorlu ise silindir kapasitesi 50 cm³ ü geçen yolcu sepetli iki tekerlekli araçtır. L5 Sınıfı: Azami hızı 45 km/s i ve içten yanmalı motorlu ise silindir kapasitesi 50 cm³ ü geçen, simetrik olarak yerleştirilmiş üç tekerlekli araçtır. L6 Sınıfı: Azami hızı 45 km/s i, elektrik motorlu araçlarda akü ağırlığı hariç yüksüz ağırlığı 0.35 tonu, kıvılcım ateşlemeli motor ise silindir kapasitesi 50 cm³ ü, diğer tip içten yanmalı motorlu ise azami net gücü 4 kw ı, elektrik motorlu ise azami sürekli nominal güç çıkışı 4 kw ı geçmeyen dört tekerlekli araçtır. L7 Sınıfı: Elektrik motorlu araçlarda akü ağırlığı hariç yüksüz ağırlığı 0.4 tonu (yük taşıma amaçlı araçlarda 0.55 ton), azami net gücü 15 kw ı geçmeyen ve L6 sınıfına girmeyen dört tekerlekli araçtır

3 Taşıtların Sınıflandırılması M Sınıfı En az dört tekerlekli ve yolcu taşımasında kullanılan motorlu araçlardır. M1 Sınıfı: Yolcu taşımasında kullanılan ve sürücü dahil en fazla 9 oturma yeri olan motorlu araçtır. M2 Sınıfı: Yolcu taşımasında kullanılan, sürücü dahil 9 dan fazla oturma yeri olan ve azami ağırlığı 5 tonu aşmayan motorlu araçtır. M3 Sınıfı: Yolcu taşımasında kullanılan, sürücü dahil 9 dan fazla oturma yeri olan ve azami ağırlığı 5 tonu aşan motorlu araçtır.

4 Taşıtların Sınıflandırılması N Sınıfı En az dört tekerlekli ve yük taşımasında kullanılan motorlu araçlardır. N1 Sınıfı: Yük taşımasında kullanılan ve azami ağırlığı 3.5 tonu aşmayan motorlu araçtır. N2 Sınıfı: Yük taşımasında kullanılan ve azami ağırlığı 3.5 tonu aşan, ancak 12 tonu aşmayan motorlu araçtır. N3 Sınıfı: Yük taşımasında kullanılan ve azami ağırlığı 12 tonu aşan motorlu araçtır.

5 Taşıtların Sınıflandırılması O Sınıfı Bir motorlu araç tarafından çekilen römork veya yarı römork motorsuz yük taşıma araçlarıdır. O1 Sınıfı: Azami ağırlığı 0.75 tonu aşmayan motorsuz yük taşıma aracıdır. O2 Sınıfı: Azami ağırlığı 0.75 tonu aşan, ancak 3.5 tonu aşmayan motorsuz yük taşıma aracıdır. O3 Sınıfı: Azami ağırlığı 3.5 tonu aşan, ancak 10 tonu aşmayan motorsuz yük taşıma aracıdır. O4 Sınıfı: Azami ağırlığı 10 tonu aşan motorsuz yük taşıma aracıdır.

6 Taşıtların Sınıflandırılması G Sınıfı - Arazi Taşıtları N1 sınıfı araçlardan azami kütlesi 2 tonu aşmayanlar ve M1 sınıfındaki motorlu araçlar, en az bir ön dingili ve en az bir arka dingili eşzamanlı tahrikli olarak tasarlanmış, bir dingilinin tahriki ayrılabilen araçlar dahil ve en az bir diferansiyel kilit mekanizması veya buna benzer işlevde en az bir mekanizması varsa ve tek araç için hesaplanan % 30 luk bir eğimi tırmanabiliyorsa, arazi tipi araç olarak kabul edilir. N1 sınıfı araçlardan azami kütlesi 2 tonu aşanlar ile N2, N3, M2 ve M3 sınıfı araçların arazi taşıtı sayılabilmesi için Motorlu Araçlar ve Römorkları Tip Onayı Yönetmeliğindeki şartları taşıması gerekmektedir.

7 HAREKET DİRENÇLERİ
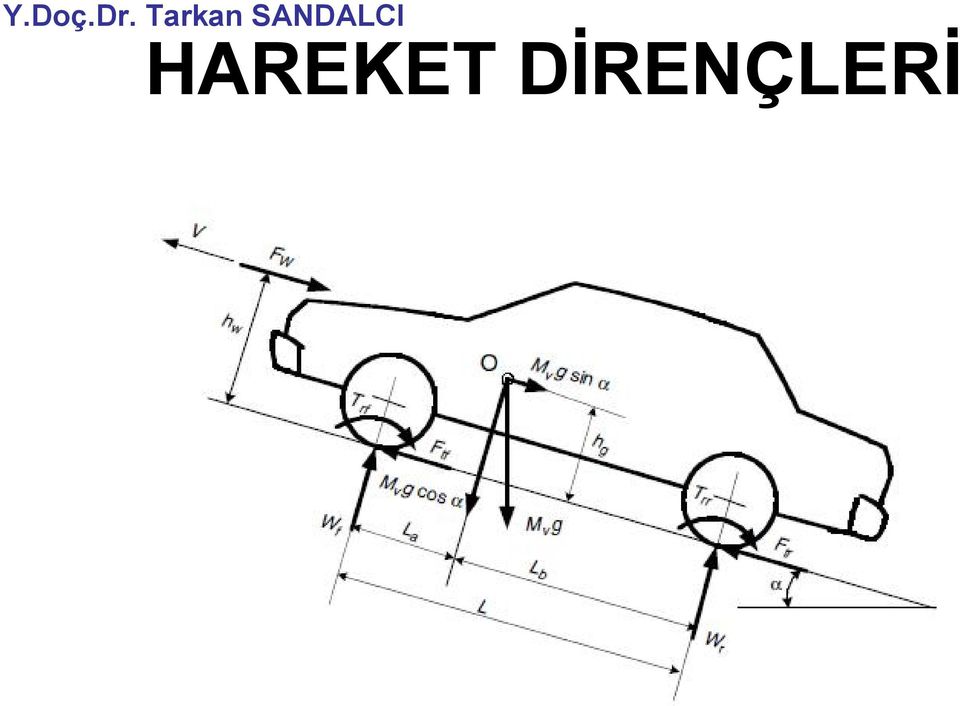
8 HAREKET DİRENÇLERİ Taşıt hareketine ters yönde etki eden kuvvetlerin, taşıt ekseni doğrultusundaki bileşenlerinin toplamına hareket dirençleri adı verilir. Taşıtın hareket edebilmesi için, taşıta etki eden hareket dirençlerinin toplamı kadar bir itme kuvvetinin, tahrik tekerlerinde oluşturulması gerekmektedir. Tahrik tekerlerinde oluşturulan itme kuvvetinin zemine iletilebilecek sınır değeri, tahrik tekerlerinin dingil yükü ile, lastikle yol arasındaki sürtünme katsayısının çarpımına eşittir.

9 HAREKET DİRENÇLERİ Bu değerin üzerinde oluşturulacak itme kuvveti, lastikle yol arasında kaymaya (patinaj) neden olacaktır. Benzer şekilde, lastikten yola iletilecek kuvvetin sınır değerinin, toplam dirençlerden küçük olması durumunda ise hareket halindeki taşıt yavaşlayacak, duran taşıt ise hareket edemeyecektir.

10 HAREKET DİRENÇLERİ Taşıta etki eden hareket dirençleri: 1. Yuvarlanma direnci. 2. Hava direnci. 3. Yokuş direnci. 4. İvme direnci.

11 HAREKET DİRENÇLERİ Yuvarlanma direnci (W R ) Lastiğin elastikiyetine ve iç direncine bağlı olarak düşey eksene göre hareket doğrultusundaki temas yüzeyinde, şekil değiştirmeye karşı oluşan direnç nedeniyle yüzey basıncı artış gösterirken, düşey eksenin hareket doğrultusuna aksi yönündeki temas yüzeyinde, deforme olmuş tekerleğin tekrar eski konumuna hızla dönüşememesi etkisi nedeniyle yüzey basıncında azalma meydana gelir. Bu nedenle teker tepkisi, teker düşey ekseninden e mesafesi kadar, hareket yönünde kayar. Bu durum, tekerleğin dönmesini etkileyecek şekilde, değeri e mesafesi ile dingil yükünün çarpımına eşit, yönü tahrik momentine zıt olan bir moment doğurur. Bu momentin, teker merkezinde, tahrik yönüne zıt yönde yarattığı kuvvet yuvarlanma direnci olarak tanımlanır. F N b p G e p L M d W R dl W = Gf..cosα R ρ r

12 HAREKET DİRENÇLERİ Yuvarlanma direnç katsayısının (f) değeri seyir hızına bağlı olarak hesaplanır ve ampirik formüllerle veya doğrudan nümerik değerle ifade edilir. Bu formüllerden bazıları; Zemin Büyük parke taşı 0,015 Ufak parke taşı 0,015 Beton, asfalt 0,015 Çakıl, kırma taş 0,02 Stabilize - Kuru - Islak Yuvarlanma Direnç Katsayısı (f) 0,025 0,05 0,15 Toprak yol 0,05 0,15 Tarla 0,07 0,12 Kumlu yol 0,10 0,35 Karlı yol 0,07 0,10 Demir yolu 0,001 0,002
 0,025 0,05 0,15 Toprak yol 0,05 0,15 Tarla 0,07")
13 HAREKET DİRENÇLERİ Hava Direnci (WL) Taşıt hareketi esnasında, çevrelendiği hava tabakası tarafından bir akışa maruz kalır. Havanın bir kısmının, taşıtın, radyatör ve havalandırma kanallarından geçmesi, iç akışı ve iç akış kayıplarını oluşturur. Taşıtın dış yüzeyinden akan hava ise dış kayıpları oluşturur. Dış akış nedeni ile oluşan kayıplar, taşıtın ön ve arka yüzeyleri arasında oluşan basınç farkından ve taşıt yüzeyinin hava tabakası ile sürtünmesinden ortaya çıkar.

14 HAREKET DİRENÇLERİ W 1 =. 2 L ρ h. C D. AV. 2 C D : Aerodinamik direnç katsayısı A: Projeksiyon alanı V = ( V T V R ) / 3,6 V = ( V T VR ) / 3,6 Taşıt ile rüzgar aynı yönde hareket ediyor ise. V = ( V T + VR ) / 3,6 Taşıt ile rüzgar ters yönde hareket ediyor ise. V<50 (km/h) ise W L =0 alınır. W L : Hava direnci (N) ρ h : Havanın özgül kütlesi (kg/m 3 ) V : Bağıl rüzgar hızı (m/s) V T : Taşıtın seyir hızı (km/h) V R : Rüzgar hızı (km/h)
 / 3,6 Taşıt ile rüzgar ters yönde hareket ediyor ise. V<50 (km/h) ise W L =0 alınır.")
15 HAREKET DİRENÇLERİ Araç tiplerine göre aerodinamik direnç katsayıları değişimleri Araç tiplerine göre projeksiyon alanları (m 2 ) Taşıt türü Projeksiyon alanı (m 2 ) Küçük otomobil 1.0 1,3 Otomobil 1,5 2,8 Otobüs 3,5 7 Kamyon 3 5,3 Kapalı kasa kamyon 3,5 8 Araç Tipi C D Cabrio 0,50 0,70 Arazi taşıtı 0,50 0,60 Sedan 0,35 0,45 Hatcback 0,30 0,40 Station-wagon 0,42 0,47 Damla modeli 0,15 0,20 Motosiklet ,70 Minibüs 0,40 0,45 Otobüs 0,60 0,70 Kamyon 0,80 1,50 Çekici-yarı römork 0,70 1,00 Çekici-römork 0,70 1,00

16 HAREKET DİRENÇLERİ Yokuş Direnci (WS) Çıkış eğimli yolda, hareketi engelleyen ve taşıt ağırlığının, hareket doğrultusunda, hareket yönüne ters yönlü bileşenidir. W S = G.sinα α

17 HAREKET DİRENÇLERİ İvme Direnci (Wb) Taşıtın ivmelenmesi sırasında oluşan dirence ivme direnci adı verilir. İvme direnci, toplam taşıt kütlesinin çizgisel ivmelenmesi ve taşıttaki tüm dönen kütlelerin ivmelendirilmesi için gereken kuvvetlerin toplamına eşittir Teker Tahrik Tekeri Motor I 2,ω 2 Vites kutusu Kavrama I 3, ω 3 Şaft I 1, ω1 Aks Diferansiyel Wb = ϕ. m. dv dt T Teker I T, ω T

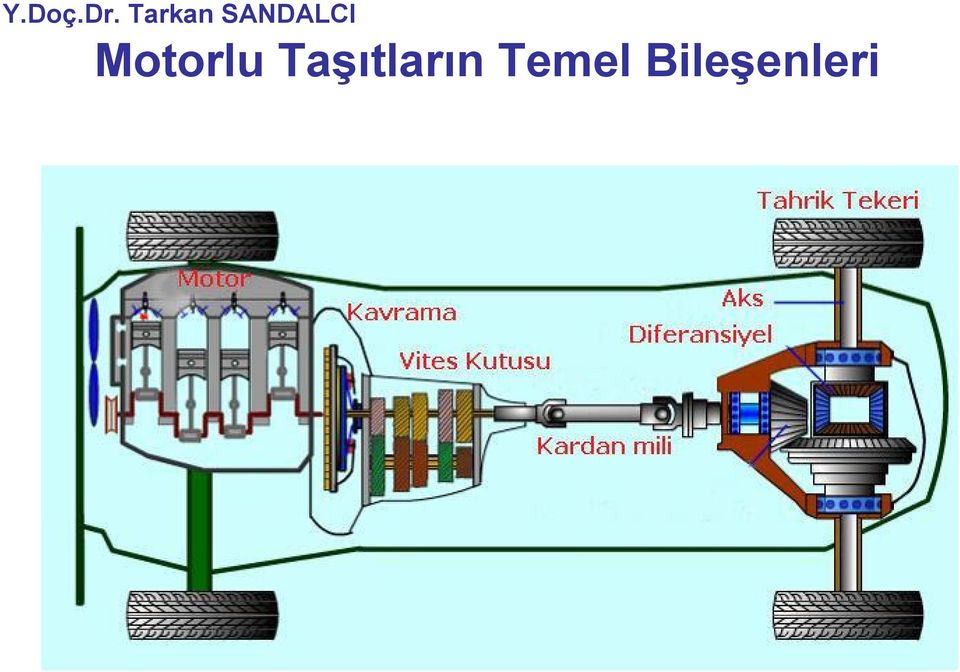
18 Motorlu Taşıtların Temel Bileşenleri

19 Motorlu Taşıtların Temel Bileşenleri
20 Taşıtlarda Kullanılan İçten Yanmalı Motorlar Ateşleme tipine göre Kıvılcım Ateşlemeli Motorlar (Otto) Sıkıştırma Ateşlemeli Motorlar (Diesel) Strok sayısına göre 4 stroklu 2 stroklu
 Strok sayısına göre 4")
21 İçten Yanmalı Motorlar 4-Stroklu motor Emme Sıkıştırma Ateşleme Genişleme Egzoz İş stroğu
22 İçten Yanmalı Motorlar
23 İçten Yanmalı Motorlar 2-stroklu motor
24 İçten Yanmalı Motorlar 2-stroklu motor
25 Y.Doç.Dr. Tarkan Taşıtlarda SANDALCI Kullanılan Diğer Wankel motor Elektrik Motorları AC motor DC motor Motorlar
26 Aktarma Organları
27 Kavramalar Motorlu taşıtlarda kullanılan kavramalar, motorla vites kutusu arasına bağlanmış olup, motordan vites kutusuna hareket iletimini sağlamak ve gerektiğinde motorun çalışmasını etkilemeden hareket iletimini kesmektir. Kavramanın görevleri: Gerekli hallerde motorla güç aktarma organlarının bağlantısını kesmek. İlk hareket sırasında motorun hareketini tekerleklere ileterek taşıtın sarsıntısız olarak harekete geçişini sağlamak. Taşıt hareket halinde iken vites durumlarını değiştirmek için motordan vites kutusuna hareket iletimini geçici olarak kesmek.
28 Kavramalar KAVRAMA ÇEŞİTLERİ Sürtünme diskli kavramalar (mekanik kavrama) Hidrolik kavramalar Tork konvertörleri
29 Kavramalar Mekanik kavramalarda motor hareketinin vites kutusuna aktarılmasında kavrama diskinin, volan yüzeyi ve baskı plakası yüzeyi arasındaki sürtünme kuvvetinden yararlanılır. Kavramının bağlı olduğu durumda kavrama diski yayın etkisi ile baskı plakası ve volan arasında sıkışır. Disk volan ile birlikte dönmeye zorlanır.
30 Kavramalar 1-Pompa kanatları. 2-Türbin kanatları. 3-Kavrama gövdesi Hidrolik kavrama, içi sabit viskoziteli bir sıvı ile dolu kap içerisinde hareket eden pompa ve türbin kanatlarından oluşur. Pompa kanatları motorun krank miline bağlıdır ve pompa momenti motor momentine eşittir. Pompa kanatları tarafından kinetik enerjisi arttırılarak dönmeye zorlanan sıvı pompa kanatlarından uzaklaşarak türbin kanatlarını dönmeye zorlar. Sıvı tarafından pompa kanatlarından türbin kanatlarına aktarılan moment vites kutusu giriş momentine eşittir. Pompa kanatlarından türbin kanatlarına moment iletiminin gerçekleşe bilmesi için pompa kanatları ile türbin kanatları arasında hız farkı olmalıdır. Uygulamada bu hız farkı %3-5 mertebesindedir.
31 Kavramalar 1-Pompa kanatları. 2-Türbin kanatları 3-Stator kanatları. 4-Tek yönlü kavrama 5-Konverter gövdesi. Tork konvertörler motor ile vites kutusu arasında hareket aktarımının yanı sıra kademesiz moment değiştirme işlemini de gerçekleştirirler. Bu nedenle genel karakteristik yönünden mekanik sürtünmeli kavrama ve hidrolik kavramalardan ayrılırlar. Tork konverterlerde hidrolik kavramaya ilave olarak pompa ve türbin kanatları arasına stator kanatları yerleştirilmiştir. Statorun görevi türbin kanatlarını terk eden yağı yönlendirerek pompa kanatlarına uygun açı ile girmesini sağlamaktır. Stator gövdeye tek yönlü kavrama ile bağlıdır. Tek yönlü kavrama statorun sadece pompa ile aynı yönde dönmesine izin verir
32 Kavramalar Pompa ve türbin kanatları arasındaki hız farkının büyük olduğu çalışma koşullarında, türbin kanatlarını terk eden yağ statoru pompa kanatlarının dönüş yönünün zıt yönünde dönmeye zorlar. Bu durumda tek yönlü kavrama kilitlenerek statorun dönmesini engeller. Sabit kalan stator, türbin kanatlarını terk eden yağın uygun açı ile pompa kanatlarına girmesini sağlar. Pompa kanatlarına girişte belirli bir kinetik enerjiye sahip olan yağ, pompa kanatlarından kinetik enerjisini artırarak çıkar. Pompa ile türbin kanatları arasındaki hız farkı ve sistemin tasarımına bağlı olarak çıkış momenti giriş momentinin 3 3,5 katına ulaşır.
33 VİTES KUTULARI Taşıt tahrikinde enerji kaynağı olarak kullanılan motorun tahrik tekerlerine doğrudan bağlanması, tahrik tekerlerinin yüksek hızlarda dönmesine ve elde edilecek itme kuvvetinin taşıtı hareket ettiremeyecek düzeyde kalmasına neden olur.
34 VİTES KUTULARI Değişik seyir koşullarında gerekli itme kuvvetinin tahrik tekerlerinde oluşturula bilmesi için motor momentinin belirli oranlarda arttırılarak tahrik tekerlerine iletilmesi gerekir. Bu işlem vites kutuları ile gerçekleştirilir.
35 VİTES KUTULARI Vites Kutusu Çeşitleri Manuel vites kutuları Standart vites kutusu Daimi temaslı vites kutusu Otomatik vites kutuları Planet mekanizmalı CVT Yarı otomatik
36 VİTES KUTULARI Standart vites kutusu 1-Priz-direkt mili 2-Priz-direkt mili dişlisi 3-Grup dişlisi 4-Vites dişlisi 5-Serbest dişli 6-Vites dişli mili
37 VİTES KUTULARI Standart vites kutusu Standart vites kutularında düz dişliler kullanılır. Bu vites kutuları diğer vites kutularına göre daha sesli çalışırlar. Priz-direkt milinden gelen hareket prizdirekt dişlisinden karşılığı olan grup dişlisine geçer ve kavramanın bağlı olduğu durumda grup dişlileri motordan gelen hareketle yağ içerisinde dönerler. Vites dişlileri vites dişli mili üzerine kayar kama ile yataklanmıştır. Mil ile aynı açısal hızda dönen vites dişlilerinin eksenel yönde hareket serbestileri vardır. Standart vites kutularında çalışacak vites kademesine ait vites dişlisi ilgili grup dişlisi ile karşı karşıya getirilmek suretiyle hareket grup dişlisinden vites dişlisine aktarılır. Vites dişli miline kayar kama ile bağlı olan vites dişlisinden hareket mile geçerek vites kutusundan çıkar.
38 VİTES KUTULARI Daimi Temaslı vites kutusu 1-Priz-direkt mili. 2-Priz-diretk mili dişlisi. 3-Grup dişlisi. 4-Vites dişlisi. 5-Serbest dişli. 6-Vites dişli mili. 7-Senkromeç
39 VİTES KUTULARI Daimi temaslı vites kutularında helisel dişliler kullanılır. Standart vites kutularına oranla daha sessiz çalışırlar ve daha mukavimdirler. Priz-direkt milinden gelen hareket priz-direkt dişlisinden karşılığı olan grup dişlisine geçer ve kavramanın bağlı olduğu durumda grup dişlileri motordan gelen hareketle yağ içerisinde dönerler. Vites dişlileri vites dişli mili üzerine yataklanmışdır ve karşılığı olan grup dişlisi ile sürekli temas halindedir. Kavramanın bağlı olduğu durumda motor hareketi priz-direkt mili dişlisinden grup dişli miline, grup dişlilerinden karşılığı olan vites dişlilerine geçer. Vites dişlilerinden vites dişli miline hareketin aktarılması senkromeç mekanizması sayesinde gerçekleşir. Senkromeç vites dişli miline kayar kama ile yataklanmıştır.
40 VİTES KUTULARI
41 VİTES KUTULARI Senkromeç mekanizması
42 VİTES KUTULARI Senkromeç mekanizmasının çalışması 1-Vites dişlisi. 2-Kavrama dişlisi. 3-Konik yüzeyler. 4-İç dişli kavrama. 5-Dış dişli kayar kavrama. 6-Frezeli mil.
43 VİTES KUTULARI Planet mekanizması 1- Güneş dişli. 2- Planet dişli. 3-Çember dişli. 4-Planet taşıyıcı. Temel planet mekanizması güneş dişli, çember dişli, planet dişliler ve kol mekanizmasından oluşur. Sistemin ortasında yer alan güneş dişli ile sistemi dıştan kavramış olan çember dişli arasında planet dişliler bulunur. Planet dişliler kendi eksenleri etrafında dönerken aynı zamanda güneş dişli ekseni etrafında da dönebilirler. Planet dişliler taşıyıcı kol mekanizması ile birbirlerine bağlıdırlar. Kol planet dişlilerin merkezine yataklanmıştır ve planet dişliler ile birlikte güneş dişli eksenini etrafında dönerler
44 VİTES KUTULARI Otomatik Vites Kutusu Temel planet mekanizması için muhtemel çevrim oranları ve hareketin çıkıştaki durumu Giriş Frenlenen Çıkış Çevrim Oranı 1 Güneş Kol Çember R 2 R1 Açıklama Hareket çıkışta ters yönde yavaşlıyor. R 1 2 Çember Kol Güneş Hareket çıkışta ters yönde hızlanıyor. R2 R2 3 Kol Güneş Çember R + R ) Hareket çıkışta hızlanıyor. 4 Çember Güneş Kol 5 Kol Çember Güneş 6 Güneş Çember Kol ( 1 2 ( R 1 + R2 ) R 2 R1 ( R + R ) R2 ) ( R + R 1 Hareket çıkışta yavaşlıyor. Hareket çıkışta hızlanıyor. Hareket çıkışta yavaşlıyor.
45 VİTES KUTULARI CVT Vites Kutusu
46 Hareket iletim metotları Önden tahrikli taşıt Önden Çekişli Araç Motorun itiş gücü, şanzıman diferansiyeli yoluyla sağ ve sol tahrik miline, tekerlek ve lastiklere aktarılır
47 Hareket iletim metotları Arkadan tahrikli taşıt Arkadan Çekişli Araç Motor itiş gücü, şanzımandan iletilir daha sonra kardan mili ve diferansiyel yoluyla sağ ve sol tahrik miline, aks miline, tekerlek ve lastiklere iletilir.
48 Hareket iletim metotları Dört tekerden tahrikli taşıt Sürekli 4WD araçlarda, ön ve arka tekerlekler arasındaki hız farkını absorbe etmek için ön ve arka diferansiyellere ek olarak bir de orta diferansiyel bulunur. Üç farklı diferansiyel, gücün dört tekerlere eşit olarak aktarılmasını ve, viraj alırken dahi, rahat bir sürüşün gerçekleşmesini mümkün hale getirir. Kısmi 4WD lerde ön ve arka tekerlekler arasındaki devir farkını absorbe eden diferansiyel yoktur ve dolayısıyla dört çeker sistemi devredeyken keskin viraj alındığında keskin virajda kaymadan virajı rahat almak imkansız hale gelir. Bu nedenle, kısmi 4WD araçlarda, sürüş koşullarına uygun olarak, 2 tekerlekten çekiş ve 4WD arasında geçişler yapmak gerekir.
49 Kardan Milleri Arkadan ve dört tekerden tahrikli taşıtlarda, vites kutusundan diferansiyele hareket, açısal ve boyutsal değişikliklere izin veren kardan milleri ile aktarılır.
50 Kardan Milleri
51 DİFERANSİYEL Seyir stabilitesinin korunması amacı ile vites kutusu çıkışındaki hareketin tahrik tekerlerine ayrı ayrı iletilmesi gerekebilir. Gerekli koşullarda tahrik tekerlerinin birbirlerinden farklı açısal hızlarda dönmesine imkan vermek amacıyla diferansiyel mekanizması kullanılır. Taşıtın virajda seyri esnasında viraj dışında kalan tekerin teğetsel hızı viraj içindeki tekerin teğetsel hızından daha fazla olmalıdır. Aksi halde taşıt yön değiştirmeye karşı direnç gösterecektir. Bu seyir stabilitesini olumsuz yönde etkilerken lastiklerde aşınmaya yol açar
52 DİFERANSİYEL Sağ ve sol teker etkili yarı çaplarının farklı olması. Bu durum iki değişik koşulda oluşabilir. r r1 r r2 a) Dengesiz yük dağılımı: Taşıt yükünün taşıt orta eksenine göre dengesiz dağılımı sağ ve sol teker tepkilerini farklılaştıracağından tekerlerin etkili yarı çaplarının da farklılaşmasına neden olur. b) Lastik basınçlarının farklı olması : Sağ ve sol teker lastik basınçlarının farklı değerde olması etkili teker yarıçaplarının farklı değerler almasına neden olur. Her iki durumda taşıtın düzgün ilerliye bilmesi için etkili teker yarıçapı küçük olan tekerin daha hızlı dönmesi gerekir.
53 DİFERANSİYEL 1-Mahruti dişli. 2-Ayna dişli. 3-Pinyon taşıyıcı. 4-Pinyon dişli. 5-Aks dişlisi. 6-Aks mili. Vites kutusu çıkışındaki hareket dişli veya şaft ile mahruti dişliye aktarılır. Mahruti dişli ayna dişli ve ayna dişliye rijit bağlı olan pinyon taşıyıcıyı döndürür. Pinyon dişlilerin yataklandığı mil, aks mili ekseni etrafında pinyon taşıyıcı ve ayna dişli ile aynı açısal hızda döner. Pinyon dişliler yataklandıkları mil ile aks mili ekseni etrafında dönerken kendi eksenleri etrafında dönme serbestileri vardır. Pinyon dişliler her iki aks dişlisi ile birlikte çalışır.
54 DİFERANSİYEL
55 TEKERLEKLER Tekerlekler başlıca iki kısımdan oluşur. Birinci kısım çelik ve alaşımlarından yapılan jant, ikinci kısım ise yere temas eden yumuşak kısım, tekerlek lastiğidir.
56 TEKERLEKLER Jantlar Lastikleri üzerlerinde taşıyarak lastiklerin görevini en iyi şekilde yerine getirmesini sağlar. Jantlar, sürüş emniyetini sağlayan hayati parçalar oldukları için, dikey ve yanal yüklere, sürüş ve frenleme kuvvetlerine ve üzerlerine etkiyen çeşitli diğer kuvvetlere dayanacak şekilde yeterli dayanıklılıkta olmalıdır
57 TEKERLEKLER Jantlar üzerindeki işaretler 5½ J X 14 CH ½ : Jant genişliği (inç) J : Jant damak (flanş) profili X : Tek parçalı (mono blok, tubeless) jant 14 : Jant çapı (inç) CH : Janttaki "tubeless seti" tipi 36 :Jant off-seti (mm.) 0203 : Jantın üretim tarihi (ay-yıl) : Jantın seri numarası
58 TEKERLEKLER Damak flanş yükseklikleri
59 TEKERLEKLER Tubeless Seti Tipleri
60 TEKERLEKLER Lastiğin görevleri : Otomobilin yükünü ve ağırlığını taşımak Yol yüzeyi ile tekerlek arasında teması sağlayarak iyi bir sürtünme yüzeyi oluşturmak (Böylece motorun yarattığı döndürme momentini yola aktarıp çekiş kuvvetine dönüştürür ve frenlemelerde aracın uygun mesafelerde durmasını sağlar.) Yol yüzeylerindeki pürüzlerden ve sürüşten doğan titreşimleri ve darbeleri emerek yok etmek (Böylece süspansiyon sisteminin elemanı gibi çalışır.) Direksiyon ile verilen yönü izlemek (Viraj dönüşlerinde direksiyon kontrolüne gerekli olan yanal kuvveti üretir.)
61 TEKERLEKLER Lastiğin yapısı
62 TEKERLEKLER
63 TEKERLEKLER