OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
|
|
|
- Ebru Onut
- 8 yıl önce
- İzleme sayısı:
Transkript
1 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH

2 İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları ve ayrılma noktaları içeren blok diyagramların tersine,işaret akış diyagramları sadece sistemleri temsil eden dallar ve işaretleri temsil eden düğümler içerir. Bir sistem, üzerinde işaret akış yönünü gösteren ok bulunan bir dal ile temsil edilir. Dal üzerinde sistemin transfer fonksiyonu bulunur. Bir işaret ise bir düğümle temsil edilir ve ismi düğüm üzerine yazılır. Bir işaret akış diyagramı bir blok diyagramın basitleştirilmiş hali olarak düşünülebilir. İşaret akış diyagramı doğrusal sistemlerde cebirsel denklemlerin neden etki ilişkisini gösterebilmek için S. J. Mason tarafından geliştirilmiştir. Blok diyagramları ile lineer sistemler kolaylıkla modellenebilir. S domenine geçildiğinde sistem diferansiyel denklemleri s in polinomları olan cebirsel sistemlere dönüşür. Karmaşık sistemlerde blok diyagramlarını indirgemek zor ve zaman alıcı olabilir. Ayrıca blok diyagramları arasındaki işaret akışı net olarak görülemeyebilir. İşaret akış diyagramları, blok diyagramları gibi sistemin neden sonuç ilişkisini gösteren ancak daha basit bir inceleme yöntemidir. 35

3 İŞARET AKIŞ DİYAGRAMLARININ ÖZELLİKLERİ Bir kol (dal) üzerinden işaret ancak ok yönünde geçer. Bir düğüm kendisine gelen tüm kolların (dalların) işaretlerini toplar ve kendinden ayrılan kola (dala) aktarır. Verilen bir sistem için işaret akış grafiği tekdeğildir. Farklı matematiksel ifadeler ile farklı akış diyagramları çizilebilir. İşaretAkış Diyagramlarının Avantajları : İşaretin girişi, işaretin akışı ve sistem çıkışı daha açık gösterilir. İndirgeme işlemi blok diyagramlarına göre daha kolaydır. 36 Çoğu zaman kazanç formülü kullanılarak diyagramı indirgemeden bile durum değişkenleri arasındakibağıntı belirlenir.

4 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI Düğüm : Bir değişken veya işareti gösteren nokta, Geçiş fonksiyonu : İki düğüm arasındaki kazanç (Transfer fonksiyonu), Kol (Dal) : İki düğümü birleştiren yönlendirilmiş çizgi, Yol : Oklar yönünde gidilerek geçilen kolların grubu, Açıkyol:Düğümlerden bir defadan fazla geçmeyen yol, Kapalı yol : Bağlandığı düğüme geri dönen veya diğer herhangi bir düğümden geçmeyen yol, Döngü : Kapalı bir yol, Bağımsız (temassız) döngü (Nontouching Loops) :Ortak düğümlere sahip olmayan döngü (Two parts of an SFG are nontouching, if they do not share a common node), 37
 döngü (Nontouching Loops) :Ortak düğümlere sahip olmayan döngü (Two parts of an SFG are nontouching, if they do not share a")
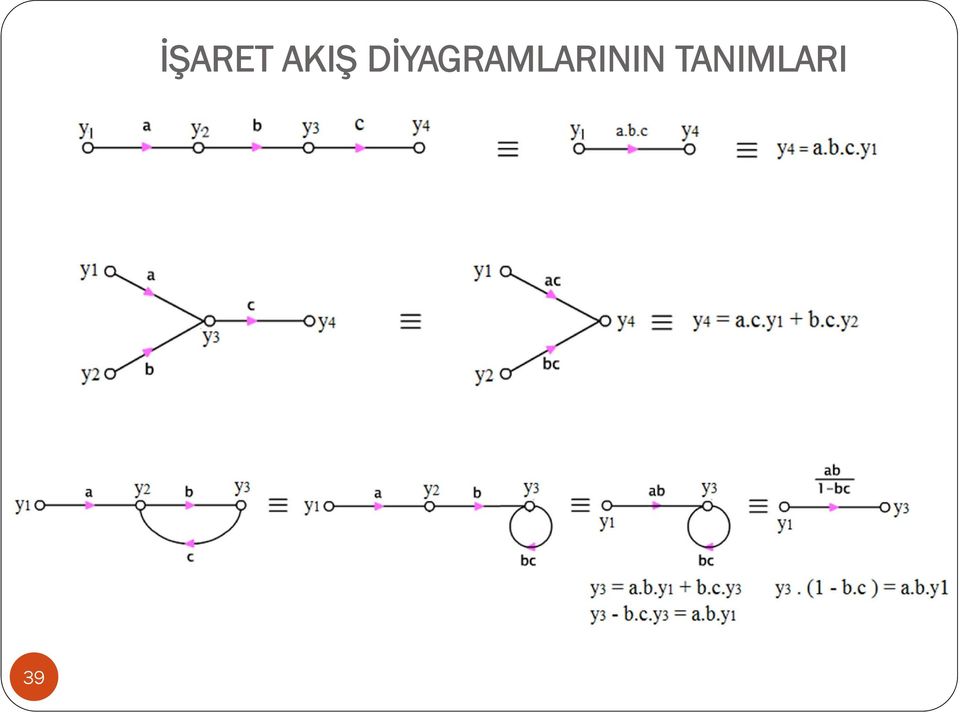
5 38 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI

6 39 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI
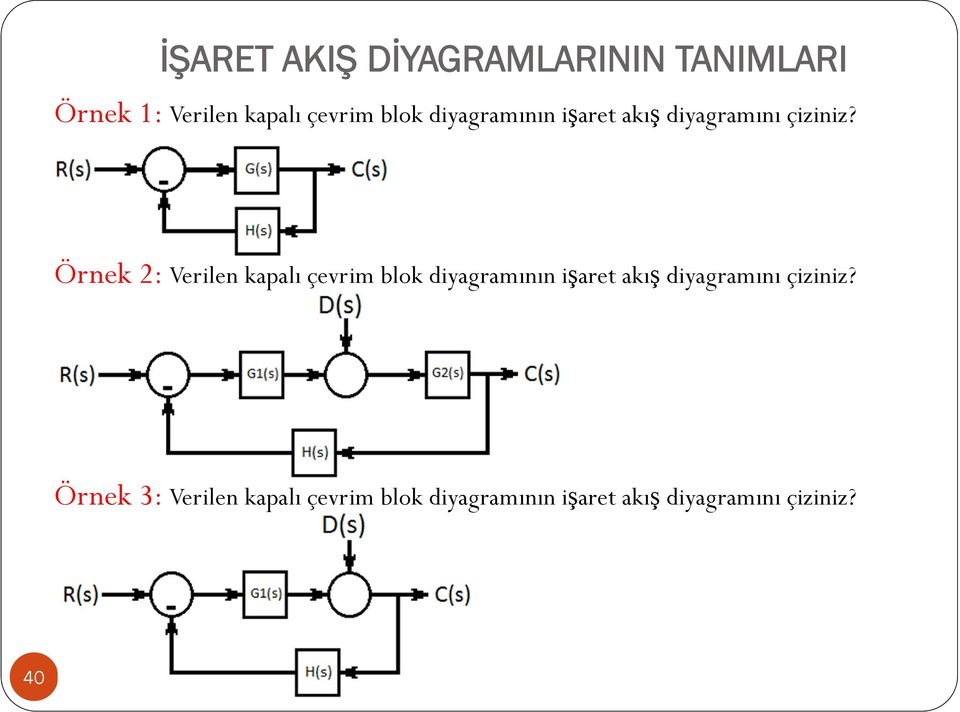
7 İŞARET AKIŞ DİYAGRAMLARININ TANIMLARI Örnek 1: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? Örnek 2: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? Örnek 3: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? 40
8 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Bir giriş düğümü ile bir çıkış düğümü arasındaki kazanç, bu iki düğüm arasındaki toplam kazanç ve toplam geçiş fonksiyonudur. Toplam kazanç için aşağıdaki Mason kazanç formülü uygulanabilir. N adet ileri yolu ve L adet döngüsü bulunan bir akış diyagramı verildiğinde R(s) giriş düğümü ile C(s) çıkış düğümü arasındaki kazanç yanda verilen formül ile bulunur. Bu formüle Mason kazanç formülü adı verilir. Burada, n :Toplam ileri yol sayısı, Pk : Giriş ile çıkış arasında var olan ileri yollardan k. sının ileri yol kazancı, T(s) : Giriş ile çıkış arasındaki toplam kazanç, 1 (Tümfarklı döngü kazançlarının toplamı ) + (Mümkün olabilen ikili temassız döngülerin kazançları çarpımının toplamı) (Mümkün olabilen üçlü temassız döngülerin kazançları çarpımının toplamı)+. 41 k. Cı ileri yolun kaldırılması ile elde edilen diyagramın sı yada Pk nınkofaktörü.

9 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Örnek 1: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? İşaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? Örnek 2: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? İşaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? 42

10 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Örnek 3: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? İşaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? 43

11 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Örnek 4: Verilen kapalı çevrim blok diyagramının işaret akış diyagramını çiziniz? İşaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? 44

12 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Örnek 5: Verilen işaret diyagramında Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? 45
")
13 İŞARET AKIŞ DİYAGRAMLARI için MASON KAZANÇ FORMÜLÜ Örnek 6: Transfer fonksiyon indirgeme yöntemi ile çözülen blok diyagramını Mason kazanç formülünü kullanarak giriş ile çıkış arasındaki toplam iletim fonksiyonunu (kazancı) bulunuz? 46
")
14 OTOMATİK KONTROL SİSTEMLERİ DENETİM SİSTEMİTASARIM İLKELERİ

15 Otomatik Denetimin Avantajları : Otomatik Denetim Cevap Süresi : İnsan 0.8s den hızlı tepki veremez. Halbuki mikro saniyeler mertebesinde otomatik denetim yapılabilir. Ürün Kalitesi : İnsan her an aynı performansta çalışamaz. Dolayısıyla insan eliyle yapılan ürünlerde farklılıklar görülebilir. İnsanda hata yapma oranı yüksektir. Uzun süreli çalışmalarda insan kullanılamaz. İnsan Kullanmanın Avantajları : Öngörülemeyen durumlarda karar verip müdahale edebilir. Bilgisini ve tecrübesini kullanabilir. 48

16 Denetim Sistemi Tasarım İlkeleri Düzenleyici kontrolde; girişine verilen ayar değerinde yeterince küçük bir hata ile çalışması, İzleyici kontrolde; sistemin giriş sinyalini hatasız birşekilde takip etmesi istenir. Ayrıca sistemin, girişindeki sinyal değiştiğinde, çıkışındabudeğere ulaşması istenir. Bir denetim Sisteminde İsteneler ; Kararlı Çalışma : Sistemin sınırlı bir girişe karşı sınırlı bir çıkış vermesidir. Sistemin kararlı veya kararsız olmasının yanında kararlılık sınırına ne kadar yakın olup olmadığı da bilinmelidir. Çıkış değişkenin birim basamak sinyal girişine karşı verdiği cevaba birim basamak cevabı denir. Bu sistem karakteristiği üzerinde önemli bir bilgi sağlar. 49

17 Denetim Sistemi Tasarım İlkeleri Geçici Durum içinde Hızlı Cevap : Kararlı duruma ulaşıncaya kadar olan davranışa geçicihal davranışı denir. Sistemin çıkışının kalıcı durum değerine en kısa sürede ulaşması istenir. Kalıcı Durum Davranışı : Bir denetim sisteminde istenilen çıkışa nekadaryaklaşıldığını belirler. Hata değeri (e) çalışılan sistem için önemsenmeyecek kadar küçük olmalıdır. Hatanın değerine göre denetim sisteminin duyarlılığından (sensivity) bahsedilir. Hata sıfıra yakın ise duyarlılık yüksektir denilir. 50
 çalışılan sistem için önemsenmeyecek kadar küçük olmalıdır.")
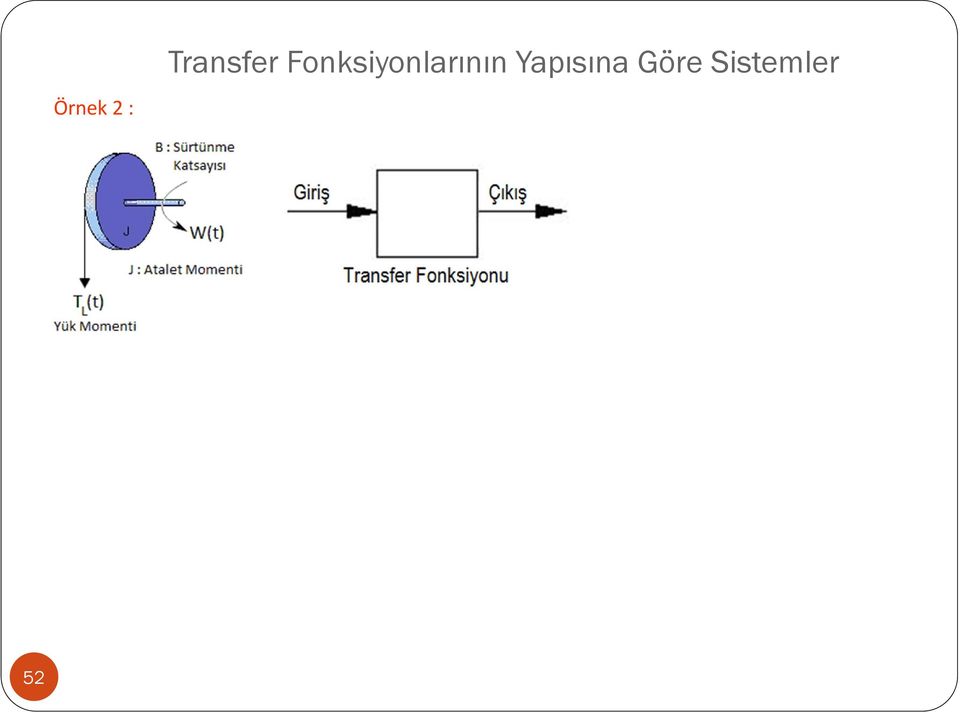
18 Transfer Fonksiyonlarının Yapısına Göre Sistemler Dinamik davranışları belirleme ve analiz etmek için transfer fonksiyonlarınyapıları kullanılır. Fiziksel yapıları farklı olsa bile sistemlerin transfer fonksiyonları benzerdir. Benzer transfer fonksiyonuna sahip fiziksel sistemlerin dinamik davranışları benzerdir. Örnek 1 : 51

19 Örnek 2 : Transfer Fonksiyonlarının Yapısına Göre Sistemler 52
20 Transfer Fonksiyonlarının Yapısına Göre Sistemler Transfer fonksiyonunun tipine göre sistemler 4 kısma ayrılır; 1) Kazanç Tipi : Temel parametresi kazançtır. [ G(s)=K ] Gecikmesi olmayan sistemdir. [ Örnek : Direnç elemanı ] Gerçekte çoğu sistem gecikmelidir. Sistem içindeki gecikmeler birbirlerine göre çok farklı ise küçük olanlar gecikmesiz olarak alınabilir. ( Transfer fonksiyonunun derecesini düşürmek için yapılır. ) 2) İntegralTipi:Temel parametresi integral zaman sabitidir [ T i ]. Girişin integrali ile değişen elemanlar [ C, L ] 53
 2) İntegralTipi:Temel parametresi integral zaman sabitidir [ T i ].")
21 Transfer Fonksiyonlarının Yapısına Göre Sistemler 3) Zaman Sabiti Tipi (1. Derece Sistemler) : Zaman sabiti elemanı olan ve 1. dereceden diferansiyel denklemlerle tanımlanan sistemlerdir. Grafikten görüldüğü üzere sistemin dinamik davranışını etkileyen tek faktör T değeridir. 54
22 Transfer Fonksiyonlarının Yapısına Göre Sistemler 4) Titreşim Tipi (2. Derece Sistemler) : Zaman sabiti elemanı olan ve 1. dereceden diferansiyel denklemlerle tanımlanan sistemlerdir. n [rad/s] : Sistemin doğal frekansı : Sönüm oranı = Gerçek sönüm katsayısı / Kritik sönüm katsayısı Sistemin davranışı özyapısal denklemin (Karakteristik denklem) çözümüne bağlıdır. nindeğerine göre kökler s 1,s 2 gerçek veya karmaşık olabilir. a) 0< s 1,s 2 kökleri karmaşık eşlenik olup s düzleminin sol tarafında yer alır. Sistem sönümlü titreşimli veya az sönümlü adını alır. 55
23 Transfer Fonksiyonlarının Yapısına Göre Sistemler b) ise sistem kritik sönümlüdür. Cevap eğrisi titreşim göstermez. c) ise sistem cevabı titreşimsiz aşırı sönümlü ve yavaş olacaktır. d) ise kökler eşlenik sanal eksen üzerinde olup sistem sönümsüz titreşimli davranış gösterir. 56
24 57 Transfer Fonksiyonlarının Yapısına Göre Sistemler
25 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
26 Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele alınmıştı. Bu bölümde ise bu kazançlarınnasıl belirlendiğianlatılacaktır. Kontrol sistemleri tanımının başlangıç noktası kontrol sisteminin matematiksel modelinin oluşturulmasıdır. Matematiksel model : t domeni, s domeni (Laplace dönüşümü), w domeni (Fourier dönüşümü) ve z domeni uygulanarak oluşturulabilir. Bu derste, işlem kolaylığı sağladığı için s donemi kullanılacaktır. Model oluşturulurken ilgili fiziksel sistemin uygun yasalarla modellenmesi gerekir; 1) Mekanik Sistemler : Newton II. Hareket yasası 2) Elektriksel Sistemler : Kirchoff ve Ohm yasası 3) Akışkan Sistemler : Süreklilik yasası veya maddenin sakınımı 4) Isıl Sistemler : Enerjinin sakınımı yasası 59
27 Modelleme Mekanik Sistemler : Bir cisim üzerine etki eden dengelenmiş kuvvetler o cisim üzerinde bir eylemsizlik kuvveti oluşturur. Akışkan Sistemler :.. θ : Pozisyon (rad) v : Hız (m/s) m : Kütle (kg) w : Açısal hız (rad/s) j : Eylemsizlik momenti (kg.m 2 ) (Bir sisteme giren madde miktarı) (Sistemden çekilen madde miktarı) = (Sistemde depolanan madde miktarı) Isıl Sistemler : (Bir sisteme giren enerji) (Sistemden çekilen enerji) = (Sistemde depolanan enerji) 60
28 Elektriksel Sistemler : Modelleme i. Basit bir elektriksel sistem direnç, kapasite ve endüktans elemanlarından oluşur. ii. Bu elemanlar farklı şekilde bağlanarak farklı elektriksel devreleri oluşturur. 1) Direnç Elemanı (R) :. veya G(s)=. G(s)= 2) Kapasite Elemanı (C) : veya G(s)= G(s)=
29 3) Endüktans Elemanı (R) : Modelleme.. veya G(s)= G(s)= Örnek 1: Aşağıdaki Lineer potansiyometrenin transfer fonksiyonunu bulunuz? 62
30 Modelleme Örnek 2: Verilen sistemin transfer fonksiyonunu bulunuz? Örnek 3: Verilen sistemin transfer fonksiyonunu bulunuz?(ny_ Yöntemi) 63
31 Modelleme Örnek 4: Verilen sistemin transfer fonksiyonunu bulunuz? Ödev: Verilen sistemin transfer fonksiyonunu bulunuz? 64
32 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde; damper (sönümleyici), sürtünme, kütle ve yaydır. Dönme hareketinde ise dönel sönümleyici, eylemsizlik momenti ve yaydır. F(t)... B : Sönümleme katsayısı (N.s/m) F : Kuvvet (N) V : Hız (m/s) b) Dönel Sönümleyici : dθ (t) M(t)=B.. B : Sönümleme katsayısı (N.s/m) T, M : Moment (N) w: Açısal Hız (rad/s) 65
33 Mekanik Elemanların Matematiksel Modeli 2) İdeal Kütle ve Eylemsizlik : a) Öteleme Kütlesi : F(t). F(s).. b) Döner Kütle : J. T(t). T(s).. G= 3 a) Ötelemeli Yay : F(t).. df(t)... 66
34 3 b) Burulma Yayı : Mekanik Elemanların Matematiksel Modeli T(t).θ.θ dt(t)... Ödev 1 : Verilen sistemin transfer fonksiyonunu bulunuz? K x s 1 Ödev 2 : Ucunda J atalet momentli disk olan ve bir ucu sabitlenmiş şekildeki sistem, uygulanan M momenti ile bükülmektedir. Disk dönme sürtünme katsayısı B olan bir ortamda hareket ettiğine göre sistemin transfer fonksiyonu nedir? 67 θ s 1
35 Mekanik Elemanların Matematiksel Modeli Örnek 1: Verilen sistemin transfer fonksiyonunu bulunuz? 68
36 Enerji Depolamayan veya Harcamayan İdeal Sistem Elemanları 1) Transformatörler :.. İ ü ü ü N : Sarım sayısı ü : Dönüştürme oranı ü>1 : Gerilim Düşürücü ü<1 : Gerilim Yükseltici 2) Dişli Kutusu (Redüktör) :.. İ 1 ü ü N : Diş sayısı ü : Dönüştürme oranı ü>1 : Hız Düşürücü ü<1 : Hız Yükseltici 69
37 İşlemsel Kuvvetlendiriciler PID denetleyicilerin analog devrelerle gerçeklenmesinde özellikle kazanç, integral ve türev alma işlemleri için işlemsel kuvvetlendiriciler kullanılırlar. Bu sebeple işlemsel kuvvetlendiricilerinde transfer fonksiyonları belirlenmelidir. 1) Kuvvetlendirici (Kazanç) : 70
38 2) Kuvvetlendiricili Karşılaştırma Devresi : İşlemsel Kuvvetlendiriciler 71
39 3) Türev alıcı Devre: İşlemsel Kuvvetlendiriciler 4) İntegral alıcı Devre: 72
40 İşlemsel Kuvvetlendiriciler Örnek 2: Verilen sistemin transfer fonksiyonunu bulunuz? 73
41 Durum Değişkenleri Modeli Sistemin dinamiğini tanımlamak için durum değişkenleri veya durum uzay modelleri de kullanılabilir. Durum değişkenlerine bağlı denklemler kullanılarak verilen bir giriş için durum değişkenleri cinsinden sistemin çıkışı tanımlanabilir. n. dereceden bir sistem dinamiğinin modellenebilmesi için n adet değişken ve n adet durum denklemi gereklidir. Genel olarak durum denklemleri ; X t u t A B C D 74
42 Özellikleri : Durum Değişkenleri Modeli Durum denklemleri bilgisayarda sayısal olarak çözülebilir. Durum denklemleri çok girişli ve çok çıkışlı sistemlerde doğrudan kolaylıkla uygulanabilir. En uygun denetleyici tasarım yöntemleri genellikle durum değişkenleri modeline dayanır. NOT 1: Durum değişkenleri tekniği çoğunlukla çağdaş denetim yöntemleri olarak, buna karşılık transfer fonksiyonu tekniği de klasik yöntemler olarak bilinir. NOT 2: Tek giriş ve tek çıkışlı sistemlerde durum değişkeni yöntemi yerine transfer fonksiyonu yöntemini kullanmak daha uygundur. Transfer fonksiyonu ve Durum denklemleri arası geçiş : G(s)= C.. 75
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH
 OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ İŞARET AKIŞ DİYAGRAMLARI SIGNAL FLOW GRAPH İŞARET AKIŞ DİYAGRAMLARI İşaret akış diyagramları blok diyagramlara bir alternatiftir. Fonksiyonel bloklar, işaretler, toplama noktaları
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ 1) İdeal Sönümleme Elemanı : a) Öteleme Sönümleyici : Mekanik Elemanların Matematiksel Modeli Basit mekanik elemanlar, öteleme hareketinde;
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI
 OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ BLOK DİYAGRAM İNDİRGEME KURALLARI BLOK DİYAGRAM İNDİRGEME KURALLARI Örnek 9: Aşağıdaki açık çevrim blok diyagramının transfer fonksiyonunu bulunuz? 2 BLOK DİYAGRAM İNDİRGEME
OTOMATİK KONTROL SİSTEMLERİ. DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ
 OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
OTOMATİK KONTROL SİSTEMLERİ DİNAMİK SİSTEMLERİN MODELLENMESİ ve ANALİZİ Modelleme Önceki bölümlerde blok diyagramları ve işaret akış diyagramlarında yer alan transfer fonksiyonlarındaki kazançlar rastgele
Ders İçerik Bilgisi. Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Karmaşık Sistemlerin Tek Bir Transfer Fonksiyonuna İndirgenmesi 1. Blok Diyagramları İle (GeçenHafta) 2. İşaret Akış Diyagramları İle (Bu Hafta) Sadeleştirme yoluyla
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN3102 OTOMATİK KONTROL Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı
 U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
U.Ü. Mühendislik Mimarlık Fakültesi Elektronik Mühendisliği Bölümü ELN30 OTOMATİK KONTROL 00 Bahar Dönemi Yıliçi Sınavı Cevap Anahtarı Sınav Süresi 90 dakikadır. Sınava Giren Öğrencinin AdıSoyadı :. Prof.Dr.
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Fiziksel Sistemlerin Matematik Modeli. Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012
 Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Fiziksel Sistemlerin Matematik Modeli Prof. Neil A.Duffie University of Wisconsin-Madison ÇEVİRİ Doç. Dr. Hüseyin BULGURCU 2012 Matematik Modele Olan İhtiyaç Karmaşık denetim sistemlerini anlamak için
Ders İçerik Bilgisi. Sistem Davranışlarının Analizi. Dr. Hakan TERZİOĞLU. 1. Geçici durum analizi. 2. Kalıcı durum analizi. MATLAB da örnek çözümü
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi Sistem Davranışlarının Analizi 1. Geçici durum analizi 2. Kalıcı durum analizi MATLAB da örnek çözümü 2 Dr. Hakan TERZİOĞLU 1 3 Geçici ve Kalıcı Durum Davranışları
BÖLÜM-6 BLOK DİYAGRAMLARI
 39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
39 BÖLÜM-6 BLOK DİYAGRAMLARI Kontrol sistemlerinin görünür hale getirilmesi Bileşenlerin transfer fonksiyonlarını gösterir. Sistemin fiziksel yapısını yansıtır. Kontrol giriş ve çıkışlarını karakterize
DEVRE VE SİSTEM ANALİZİ ÇALIŞMA SORULARI
 DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
DEVRE VE SİSTEM ANALİZİ 01.1.015 ÇALIŞMA SORULARI 1. Aşağıda verilen devrede anahtar uzun süre konumunda kalmış ve t=0 anında a) v 5 ( geriliminin tam çözümünü diferansiyel denklemlerden faydalanarak bulunuz.
TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI
 Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Ders içerik bilgisi TRANFER FONKSİYONLARI SİSTEMLERİN MATEMATİKSEL MODELİ BASİT SİSTEM ELEMANLARI 1. İç değişken kavramı 2. Uç değişken kavramı MEKANİK SİSTEMLERİN MODELLENMESİ ELEKTRİKSEL SİSTEMLERİN
Sistem Dinamiği ve Kontrolü Bütünleme 26 Ocak 2017 Süre: 1.45 Saat. Adı ve Soyadı : İmzası : Öğrenci Numarası :
 Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
Adı ve Soyadı : İmzası : Öğrenci Numarası : SORU 1 Fiziki bir sistem yandaki işaret akış grafiği ile temsil edilmektedir.. a. Bu sistemin transfer fonksiyonunu Mason genel kazanç bağıntısını kullanarak
OTOMATİK KONTROL. Set noktası (Hedef) + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı
 + Kontrol edici. Son kontrol elemanı PROSES. Dönüştürücü. Ölçüm elemanı") OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
OTOMATİK KONTROL Set noktası (Hedef) + - Kontrol edici Dönüştürücü Son kontrol elemanı PROSES Ölçüm elemanı Dönüştürücü Geri Beslemeli( feedback) Kontrol Sistemi Kapalı Devre Blok Diyagramı SON KONTROL
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ MM306 SİSTEM DİNAMİĞİ Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu DönüşümÜ 1 EEM304 MM306
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
Kontrol Sistemlerinin Analizi
 Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Sistemlerin analizi Kontrol Sistemlerinin Analizi Otomatik kontrol mühendisinin görevi sisteme uygun kontrolör tasarlamaktır. Bunun için öncelikle sistemin analiz edilmesi gerekir. Bunun için test sinyalleri
Ders 3- Direnç Devreleri I
 Ders 3- Direnç Devreleri I Yard.Doç.Dr. Ahmet Özkurt Ahmet.ozkurt@deu.edu.tr http://ahmetozkurt.net İçerik 2. Direnç Devreleri Ohm kanunu Güç tüketimi Kirchoff Kanunları Seri ve paralel dirençler Elektriksel
Ders 3- Direnç Devreleri I Yard.Doç.Dr. Ahmet Özkurt Ahmet.ozkurt@deu.edu.tr http://ahmetozkurt.net İçerik 2. Direnç Devreleri Ohm kanunu Güç tüketimi Kirchoff Kanunları Seri ve paralel dirençler Elektriksel
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ
 DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
DENEY.3 - DC MOTOR KONUM-HIZ KONTROLÜ 3.1 DC MOTOR MODELİ Şekil 3.1 DC motor eşdeğer devresi DC motor eşdeğer devresinin elektrik şeması Şekil 3.1 de verilmiştir. İlk olarak motorun elektriksel kısmını
Ders İçerik Bilgisi. Dr. Hakan TERZİOĞLU Dr. Hakan TERZİOĞLU 1
 Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Dr. Hakan TERZİOĞLU Ders İçerik Bilgisi PID Parametrelerinin Elde Edilmesi A. Salınım (Titreşim) Yöntemi B. Cevap Eğrisi Yöntemi Karşılaştırıcı ve Denetleyicilerin Opamplarla Yapılması 1. Karşılaştırıcı
Otomatik Kontrol (Doğrusal sistemlerde Kararlılık Kriterleri) - Ders sorumlusu: Doç.Dr.HilmiKuşçu
 - Ders sorumlusu: Doç.Dr.HilmiKuşçu") ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
ROOT-LOCUS TEKNİĞİ Lineer kontrol sistemlerinde en önemli kontrollerden biri belirli bir sistem parametresi değişirken karakteristik denklem köklerinin nasıl bir yörünge izlediğinin araştırılmasıdır. Kapalı
MM 409 MatLAB-Simulink e GİRİŞ
 MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
MM 409 MatLAB-Simulink e GİRİŞ 2016-2017 Güz Dönemi 28 Ekim 2016 Arş.Gör. B. Mahmut KOCAGİL Ajanda-İçerik Simulink Nedir? Nerelerde Kullanılır? Avantaj / Dezavantajları Nelerdir? Simulink Arayüzü Örnek
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Algılayıcılar (Sensors)
") Algılayıcılar (Sensors) Sayısal işlem ve ölçmeler sadece elektriksel büyüklüklerle yapılmaktadır. Genelde teknik ve fiziksel büyüklükler (sıcaklık, ağırlık kuvveti ve basınç gibi) elektrik dalından olmayan
Algılayıcılar (Sensors) Sayısal işlem ve ölçmeler sadece elektriksel büyüklüklerle yapılmaktadır. Genelde teknik ve fiziksel büyüklükler (sıcaklık, ağırlık kuvveti ve basınç gibi) elektrik dalından olmayan
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
PID SÜREKLİ KONTROL ORGANI:
 PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
PID SÜREKLİ KONTROL ORGANI: Kontrol edilen değişken sürekli bir şekilde ölçüldükten sonra bir referans değer ile karşılaştırılır. Oluşacak en küçük bir hata durumunda hata sinyalini değerlendirdikten sonra,
KST Lab. Manyetik Top Askı Sistemi Deney Föyü
 KST Lab. Manyetik Top Askı Sistemi Deney Föyü. Deney Düzeneği Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada
KST Lab. Manyetik Top Askı Sistemi Deney Föyü. Deney Düzeneği Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
ESM406- Elektrik Enerji Sistemlerinin Kontrolü. 2. SİSTEMLERİN MATEMATİKSEL MODELLENMESİ Laplace Dönüşümü
 ESM406- Elektrik Enerji Sitemlerinin Kontrolü. SİSTEMLERİN MATEMATİKSEL MODELLENMESİ Laplace Dönüşümü.. Hedefler Bu bölümün hedefleri:. Komplek değişkenlerin tanıtılmaı.. Laplace Tranformayonun tanıtılmaı..
ESM406- Elektrik Enerji Sitemlerinin Kontrolü. SİSTEMLERİN MATEMATİKSEL MODELLENMESİ Laplace Dönüşümü.. Hedefler Bu bölümün hedefleri:. Komplek değişkenlerin tanıtılmaı.. Laplace Tranformayonun tanıtılmaı..
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2
 KONTROL ELEMANLARININ İNCELENMESİ 2") ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı
ELE 301L KONTROL SİSTEMLERİ I LABORATUVARI DENEY 4:ORANSAL, TÜREVSEL VE İNTEGRAL (PID) KONTROL ELEMANLARININ İNCELENMESİ 2 1. DENEY MALZEMELERİ 33-110 Analog Ünite 33-100 Mekanik Ünite 01-100 Güç Kaynağı
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Şekil 1.1 Genliği kuvantalanmamış sürekli zamanlı işaret. İşaretin genliği sürekli değerler alır. Buna analog işaret de denir.
 İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
İŞARETLER Sayısal işaret işleme, işaretlerin sayısal bilgisayar ya da özel amaçlı donanımda bir sayılar dizisi olarak gösterilmesi ve bu işaret dizisi üzerinde çeşitli işlemler yaparak, istenen bir bilgi
OTOMATİK KONTROL DERS NOTLARI. DERLEYEN: Doç. Dr. Hüseyin BULGURCU. Kasım 2014. BAU MMF Makine Müh. Bölümü
 1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin
1 OTOMATİK KONTROL DERS NOTLARI DERLEYEN: Doç. Dr. Hüseyin BULGURCU BAU MMF Makine Müh. Bölümü Kasım 2014 2 BÖLÜM-1 OTOMATİK KONTROLE GİRİŞ Kontrol Mühendisliği Kontrol Mühendisliği hedef odaklı sistemlerin
Contents. Doğrusal sistemler için kontrol tasarım yaklaşımları
 Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Contents Doğrusal sistemler için kontrol tasarım yaklaşımları DC motor modelinin matematiksel temelleri DC motor modelinin durum uzayı olarak gerçeklenmesi Kontrolcü tasarımı ve değerlendirilmesi Oransal
Otomatik Kontrol. Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri. Hazırlayan: Dr. Nurdan Bilgin
 Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Otomatik Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Hazırlayan: Dr. Nurdan Bilgin Kapalı Çevrim Kontrol Kapalı Çevrim Kontrol Sistemin Genel Gereklilikleri Tüm uygulamalar için aşağıdaki
Sistem Dinamiği. Bölüm 6. Elektrik ve Elektromekanik Sistemler. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Kontrol Sistemleri (EE 326) Ders Detayları
 Ders Detayları") Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
Kontrol Sistemleri (EE 326) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Saati Uygulama Saati Laboratuar Saati Kredi AKTS Kontrol Sistemleri EE 326 Bahar 3 0 0 3 5 Ön Koşul Ders(ler)i MATH 275, MATH 276
SHA 606 Kimyasal Reaksiyon Akışları-II (3 0 3)
") Doktora Programı Ders İçerikleri: SHA 600 Seminer (0 2 0) Öğrencilerin ders aşamasında; tez danışmanı ve seminer dersi sorumlusu öğretim elemanının ortak görüşü ile tespit edilen bir konuyu hazırlayarak
Doktora Programı Ders İçerikleri: SHA 600 Seminer (0 2 0) Öğrencilerin ders aşamasında; tez danışmanı ve seminer dersi sorumlusu öğretim elemanının ortak görüşü ile tespit edilen bir konuyu hazırlayarak
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri
 Kontrol Sistemleri") Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
Elektrik Mühendisliği Elektrik Makinaları Güç Sistemleri (Elektrik Tesisleri) Kontrol Sistemleri Elektronik Mühendisliği Devreler ve Sistemler Haberleşme Sistemleri Elektromanyetik Alanlar ve Mikrodalga
ELKE315-ELKH315 Introduction to Control Systems FINAL January 2, 2016 Time required: 1.5 Hours
 SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
SORU. Yanda serbest uyarmalı bir DA motorunun elektromekanik şeması verilmiştir. Bu doğru akım motoru, hızı kontrol edilmek üzere modellenecektir. Hız kontrolü hem endüvi devresi hem de uyarma devresi
PROSES KONTROL DENEY FÖYÜ
 T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
T.C. SAKARYA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ MAKİNA TEORİSİ, SİSTEM DİNAMİĞİ VE KONTROL ANA BİLİM DALI LABORATUARI PROSES KONTROL DENEY FÖYÜ 2016 GÜZ 1 PROSES KONTROL SİSTEMİ
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma
 Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
Zaman Domeninde Modelleme Transfer Fonksiyonu Durum Uzay Dönüşümü Durum Uzay Transfer Fonksiyonu Dönüşümü Durum Uzayında Doğrusallaştırma 1 Daha önce bir sistemi kontrol etmek için, önce o sistemin matematiksel
Ders #2. Otomatik Kontrol. Laplas Dönüşümü. Prof.Dr.Galip Cansever
 Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
Ders #2 Otomatik Kontrol Laplas Dönüşümü Prof.Dr.Galip Cansever Pierre-Simon Laplace, 1749-1827 Matematiçi ve Astronomdur. http://www-history.mcs.st-andrews.ac.uk/biographies/laplace.html LAPLAS DÖNÜŞÜMÜ
OTOMATİK KONTROL 18.10.2015
 18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
18.10.2015 OTOMATİK KONTROL Giriş, Motivasyon, Tarihi gelişim - Tanım ve kavramlar, Lineer Sistemler, Geri Besleme Kavramı, Sistem Modellenmesi, Transfer Fonksiyonları - Durum Değişkenleri Modelleri Elektriksel
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI TEMEL DEVRE TEOREMLERİNİN UYGULANMASI
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI TEMEL DEVRE TEOREMLERİNİN UYGULANMASI DENEY SORUMLUSU Arş. Gör. Şaban ULUS Şubat 2014 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI TEMEL DEVRE TEOREMLERİNİN UYGULANMASI DENEY SORUMLUSU Arş. Gör. Şaban ULUS Şubat 2014 KAYSERİ
1. DENEY ADI: Rezonans Deneyi. analitik olarak bulmak denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket:
 1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
1. DENEY ADI: Rezonans Deneyi 2. analitik olarak bulmak. 3. 3.1. denir. Serbestlik Derecesi: Genlik: Periyot: Frekans: Harmonik Hareket: Harmonik Hareket Rezonans: Bu olaya rezonans denir, sistem için
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ
 Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
Bölüm 9 KÖK-YER EĞRİLERİ YÖNTEMİ Kapalı-döngü denetim sisteminin geçici-durum davranışının temel özellikleri kapalı-döngü kutuplarından belirlenir. Dolayısıyla problemlerin çözümlenmesinde, kapalı-döngü
EEM211 ELEKTRİK DEVRELERİ-I
 EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
EEM211 ELEKTRİK DEVRELERİ-I Prof. Dr. Selçuk YILDIRIM Siirt Üniversitesi Elektrik-Elektronik Mühendisliği Kaynak (Ders Kitabı): Fundamentals of Electric Circuits Charles K. Alexander Matthew N.O. Sadiku
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI
 Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı İşaret Akış Diyagramları Mason Kuralı Durum Denklemlerinin İşaret Akış Diyagramları Durum Uzayında Alternatif Gösterimler 1 Birçok kontrol
RULMANLI VE KAYMALI YATAKLARDA SÜRTÜNME VE DİNAMİK DAVRANIŞ DENEY FÖYÜ
 T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ RULMANLI VE KAYMALI YATAKLARDA SÜRTÜNME VE DİNAMİK DAVRANIŞ DENEY FÖYÜ HAZIRLAYANLAR Prof. Dr. Erdem KOÇ Arş.Gör. Mahmut
T.C. ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ RULMANLI VE KAYMALI YATAKLARDA SÜRTÜNME VE DİNAMİK DAVRANIŞ DENEY FÖYÜ HAZIRLAYANLAR Prof. Dr. Erdem KOÇ Arş.Gör. Mahmut
Cobra3 lü Akuple Sarkaçlar
 Dinamik Mekanik Öğrenebilecekleriniz... Spiral yay Yer çekimi sarkacı Yay sabiti Burulma titreşimi Tork Vuruş Açısal sürat Açısal ivme Karakteristik frekans Kural: Belirli bir karakteristik frekansa sahip
Dinamik Mekanik Öğrenebilecekleriniz... Spiral yay Yer çekimi sarkacı Yay sabiti Burulma titreşimi Tork Vuruş Açısal sürat Açısal ivme Karakteristik frekans Kural: Belirli bir karakteristik frekansa sahip
Dr. Uğur HASIRCI. Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı
 EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
EET305 MM306 OTOMATİK SİSTEM DİNAMİĞİ KONTROL I Blok Diyagramlar Geribeslemeli Sistemlerin Analizi ve Tasarımı 1 Birçok kontrol sistemi, aşağıdaki örnekte görüldüğü gibi çeşitli altsistem ler içerir. Dolayısıyla
Ayrık zamanlı sinyaller için de ayrık zamanlı Fourier dönüşümleri kullanılmatadır.
 Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Bölüm 6 Z-DÖNÜŞÜM Sürekli zamanlı sinyallerin zaman alanından frekans alanına geçişi Fourier ve Laplace dönüşümleri ile mümkün olmaktadır. Laplace, Fourier dönüşümünün daha genel bir şeklidir. Ayrık zamanlı
Sistem Dinamiği. Bölüm 2- Dinamik Cevap ve Laplace Dönüşümü. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
Sistem Dinamiği - Dinamik Cevap ve Laplace Dönüşümü Doç. Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Soru MATLAB Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası
MATLAB/Simulink ile Sistem Modellemesine Giriş
 MATLAB/Simulink ile Sistem Modellemesine Giriş Seminer Notları 2017-2018 Güz Dönemi Arş. Gör. Abdurrahim Dal 1. GİRİŞ Günümüzde, mühendislik sistemlerinin benzetimlerinin (simülasyonlarının) önemi gün
MATLAB/Simulink ile Sistem Modellemesine Giriş Seminer Notları 2017-2018 Güz Dönemi Arş. Gör. Abdurrahim Dal 1. GİRİŞ Günümüzde, mühendislik sistemlerinin benzetimlerinin (simülasyonlarının) önemi gün
BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1. Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı
 BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1 Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı Mart 2015 0 SORU 1) Bulanık Küme nedir? Bulanık Kümenin (fuzzy
BULANIK MANTIK VE SİSTEMLERİ 2014 2015 BAHAR DÖNEMİ ÖDEV 1 Müslüm ÖZTÜRK 148164001004 Bilişim Teknolojileri Mühendisliği ABD Doktora Programı Mart 2015 0 SORU 1) Bulanık Küme nedir? Bulanık Kümenin (fuzzy
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 3 Kontrol Sistemleri I Ara Sınav 8 Haziran 4 Adı ve Soyadı: Bölüm: No: Sınav süresi dakikadır.
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Otomatik Kontrol. Kontrol Sistemlerin Temel Özellikleri
 Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
Otomatik Kontrol Kontrol Sistemlerin Temel Özellikleri H a z ı r l aya n : D r. N u r d a n B i l g i n Açık Çevrim Kontrol Kontrol Edilecek Sistem () Açık Çevrim Kontrolcü () () () () C : kontrol edilecek
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ
 MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
MEKATRONİK VE KONTROL LABORATUARI DENEY FÖYÜ DENEYİN ADI: Ters Sarkaç Kontrol Deneyi AMAÇ: Bu laboratuar deneyinde matematik denklemleri sıkça karşımıza çıkan arabalı ters sarkacın kontrolünü gerçekleştireceğiz.
Birinci Mertebeden Adi Diferansiyel Denklemler
 Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Birinci Mertebeden Adi Diferansiyel Denklemler Bir veya daha çok bağımlı değişken, bir veya daha çok bağımsız değişken ve bağımlı değişkenin bağımsız değişkene göre (diferansiyel) türevlerini içeren bağıntıya
Sistem Dinamiği. Bölüm 9- Frekans Domeninde Sistem Analizi. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
Sistem Dinamiği Bölüm 9- Frekans Domeninde Sistem Analizi Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası Dikkat
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
BÖLÜM 2 İKİNCİ DERECEDEN FİLTRELER
 BÖLÜM İKİNİ DEEEDEN FİLTELE. AMAÇ. Filtrelerin karakteristiklerinin anlaşılması.. Aktif filtrelerin avantajlarının anlaşılması.. İntegratör devresi ile ikinci dereceden filtrelerin gerçeklenmesi. TEMEL
BÖLÜM İKİNİ DEEEDEN FİLTELE. AMAÇ. Filtrelerin karakteristiklerinin anlaşılması.. Aktif filtrelerin avantajlarının anlaşılması.. İntegratör devresi ile ikinci dereceden filtrelerin gerçeklenmesi. TEMEL
ELEKTRİK MOTORLARI VE SÜRÜCÜLER ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ
 BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
BÖLÜM 2 ELEKTRİK MOTORLARINDA DENETİM PRENSİPLERİ 2.1.OTOMATİK KONTROL SİSTEMLERİNE GİRİŞ Otomatik kontrol sistemleri, günün teknolojik gelişmesine paralel olarak üzerinde en çok çalışılan bir konu olmuştur.
Temel Devre Elemanlarının Alternatif Gerilim Etkisi Altındaki Davranışları
 Temel Devre Elemanlarının Alternatif Gerilim Etkisi Altındaki Davranışları Direnç (R) Alternatif gerilimin etkisi altındaki direnç, Ohm kanunun bilinen ifadesini korur. Denklemlerden elde edilen sonuç
Temel Devre Elemanlarının Alternatif Gerilim Etkisi Altındaki Davranışları Direnç (R) Alternatif gerilimin etkisi altındaki direnç, Ohm kanunun bilinen ifadesini korur. Denklemlerden elde edilen sonuç
Sistem nedir? Başlıca Fiziksel Sistemler: Bir matematiksel teori;
 Sistem nedir? Birbirleriyle ilişkide olan elemanlar topluluğuna sistem denir. Yrd. Doç. Dr. Fatih KELEŞ Fiziksel sistemler, belirli bir görevi gerçekleştirmek üzere birbirlerine bağlanmış fiziksel eleman
Sistem nedir? Birbirleriyle ilişkide olan elemanlar topluluğuna sistem denir. Yrd. Doç. Dr. Fatih KELEŞ Fiziksel sistemler, belirli bir görevi gerçekleştirmek üzere birbirlerine bağlanmış fiziksel eleman
Açık Çevrim Kontrol Açık Çevrim Kontrol
 Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
7. Hareketli (Analog) Ölçü Aletleri
 Ölçü Aletleri") 7. Hareketli (Analog) Ölçü Aletleri Hareketli ölçü aletleri genellikle; 1. Sabit bir bobin 2. Dönebilen çok küçük bir parçadan oluşur. Dönebilen parçanın etkisi statik sürtünme (M ss ) şeklindedir. Bunun
7. Hareketli (Analog) Ölçü Aletleri Hareketli ölçü aletleri genellikle; 1. Sabit bir bobin 2. Dönebilen çok küçük bir parçadan oluşur. Dönebilen parçanın etkisi statik sürtünme (M ss ) şeklindedir. Bunun
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ
 BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
BÖLÜM 6 LAPLACE DÖNÜŞÜMLERİ 6.2. Laplace Dönüşümü Tanımı Bir f(t) fonksiyonunun Laplace alındığında oluşan fonksiyon F(s) ya da L[f(t)] olarak gösterilir. Burada tanımlanan s; ÇÖZÜM: a) b) c) ÇÖZÜM: 6.3.
Sistem Dinamiği. Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
Sistem Dinamiği Bölüm 4-Mekanik Sistemlerde Yay ve Sönüm Elemanı Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası YTÜ-Mekatronik Mühendisliği
DENEY 2. Şekil 2.1. 1. KL-13001 modülünü, KL-21001 ana ünitesi üzerine koyun ve a bloğunun konumunu belirleyin.
 DENEY 2 2.1. AC GERİLİM ÖLÇÜMÜ 1. AC gerilimlerin nasıl ölçüldüğünü öğrenmek. 2. AC voltmetrenin nasıl kullanıldığını öğrenmek. AC voltmetre, AC gerilimleri ölçmek için kullanılan kullanışlı bir cihazdır.
DENEY 2 2.1. AC GERİLİM ÖLÇÜMÜ 1. AC gerilimlerin nasıl ölçüldüğünü öğrenmek. 2. AC voltmetrenin nasıl kullanıldığını öğrenmek. AC voltmetre, AC gerilimleri ölçmek için kullanılan kullanışlı bir cihazdır.
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
Mekatroniğe Giriş Dersi 3. Hafta Temel Kavramlar Sistem Mekatronik Sistem Modelleme ve Simülasyon Simülasyon Yazılımları Basit Sistem Elemanları Bu Haftanın Konu Başlıkları SAÜ - Sakarya MYO 1 Mekatroniğe
Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi
 1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
1) Giriş Ege Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Kontrol Sistemleri II Dersi Pendulum Deneyi.../../2015 Bu deneyde amaç Linear Quadratic Regulator (LQR) ile döner ters sarkaç (rotary inverted
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması
 10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
10. Sunum: Laplace Dönüşümünün Devre Analizine Uygulanması Kaynak: Temel Mühendislik Devre Analizi, J. David IRWIN-R. Mark NELMS, Nobel Akademik Yayıncılık 1 Laplace Devre Çözümleri Aşağıdaki devrenin
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Selçuk Üniversitesi. Mühendislik-Mimarlık Fakültesi. Kimya Mühendisliği Bölümü. Kimya Mühendisliği Laboratuvarı. Venturimetre Deney Föyü
 Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi Kimya Mühendisliği Bölümü Kimya Mühendisliği Laboratuvarı Venturimetre Deney Föyü Hazırlayan Arş.Gör. Orhan BAYTAR 1.GİRİŞ Genellikle herhangi bir akış
Selçuk Üniversitesi Mühendislik-Mimarlık Fakültesi Kimya Mühendisliği Bölümü Kimya Mühendisliği Laboratuvarı Venturimetre Deney Föyü Hazırlayan Arş.Gör. Orhan BAYTAR 1.GİRİŞ Genellikle herhangi bir akış
Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi. H a z ı r l aya n : D r. N u r d a n B i l g i n
 Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Sistemin İşlevsel Kalitesi Kapalı Çevrim Kontrol Sistemin İşlevsel
Otomatik Kontrol Kapalı Çevrim Kontrol Si stemin İ şl evsel Kalitesi H a z ı r l aya n : D r. N u r d a n B i l g i n Kapalı Çevrim Kontrol Sistemin İşlevsel Kalitesi Kapalı Çevrim Kontrol Sistemin İşlevsel
2 MALZEME ÖZELLİKLERİ
 ÖNSÖZ İÇİNDEKİLER III Bölüm 1 TEMEL KAVRAMLAR 11 1.1. Fizik 12 1.2. Fiziksel Büyüklükler 12 1.3. Ölçme ve Birim Sistemleri 13 1.4. Çevirmeler 15 1.5. Üstel İfadeler ve İşlemler 18 1.6. Boyut Denklemleri
ÖNSÖZ İÇİNDEKİLER III Bölüm 1 TEMEL KAVRAMLAR 11 1.1. Fizik 12 1.2. Fiziksel Büyüklükler 12 1.3. Ölçme ve Birim Sistemleri 13 1.4. Çevirmeler 15 1.5. Üstel İfadeler ve İşlemler 18 1.6. Boyut Denklemleri
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE 301 Kontrol Sistemleri I.
 TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
TOBB Ekonomi ve Teknoloji Üniversitesi Mühendislik Fakültesi Elektrik ve Elektronik Mühendisliği Bölümü ELE Kontrol Sistemleri I Final Sınavı 9 Ağustos 24 Adı ve Soyadı: Bölüm: No: Sınav süresi 2 dakikadır.
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ BÖLÜMÜ
 DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ MM306 EEM304 SİSTEM KONTROL DİNAMİĞİ SİSTEMLERİNE GİRİŞ Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu
DÜZCE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ MÜHENDİSLİĞİ MM306 EEM304 SİSTEM KONTROL DİNAMİĞİ SİSTEMLERİNE GİRİŞ Kontrol Kavramı Laplace Dönüşümü Transfer Fonksiyonu
TORNA TEZGAHINDA KESME KUVVETLERİ ANALİZİ
 İMALAT DALI MAKİNE LABORATUVARI II DERSİ TORNA TEZGAHINDA KESME KUVVETLERİ ANALİZİ DENEY RAPORU HAZIRLAYAN Osman OLUK 1030112411 1.Ö. 1.Grup DENEYİN AMACI Torna tezgahı ile işlemede, iş parçasına istenilen
İMALAT DALI MAKİNE LABORATUVARI II DERSİ TORNA TEZGAHINDA KESME KUVVETLERİ ANALİZİ DENEY RAPORU HAZIRLAYAN Osman OLUK 1030112411 1.Ö. 1.Grup DENEYİN AMACI Torna tezgahı ile işlemede, iş parçasına istenilen
Başlıca ANALİZ TİPLERİ. ve Özellikleri
 Başlıca ANALİZ TİPLERİ ve Özellikleri 1- Yapısal Analizler :Katı cisimlerden oluşan sistemlerde, Dış yapısal yüklerin (kuvvet, tork, basınç vb.) etkisini inceleyen analizlerdir. 1.1 Statik Yapısal Analizler
Başlıca ANALİZ TİPLERİ ve Özellikleri 1- Yapısal Analizler :Katı cisimlerden oluşan sistemlerde, Dış yapısal yüklerin (kuvvet, tork, basınç vb.) etkisini inceleyen analizlerdir. 1.1 Statik Yapısal Analizler
KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU
 KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU B. HACIBEKİROĞLU, Y. GÖKÇE, S. ERTUNÇ, B. AKAY Ankara Üniversitesi, Mühendislik
KESİKLİ İŞLETİLEN PİLOT ÖLÇEKLİ DOLGULU DAMITMA KOLONUNDA ÜST ÜRÜN SICAKLIĞININ SET NOKTASI DEĞİŞİMİNDE GERİ BESLEMELİ KONTROLU B. HACIBEKİROĞLU, Y. GÖKÇE, S. ERTUNÇ, B. AKAY Ankara Üniversitesi, Mühendislik
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI
 EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI SENSÖRLER VE DÖNÜŞTÜRÜCÜLER SÜREÇ KONTROL Süreç Kontrol Süreç kontrolle ilişkili işlemler her zaman doğada var olmuştur. Doğal süreç kontrolünü yaşayan bir
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Elastisite Teorisi Düzlem Problemleri için Sonuç 1
 Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
1 Lineer Diferansiyel Denklem Sistemleri
 Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
Outline İçindekiler 1 Lineer Diferansiyel Denklem Sistemleri 1 1.1 Lineer sistem türleri (iki bilinmeyenli iki denklem)................. 1 2 Normal Formda lineer denklem sistemleri (İki bilinmeyenli iki
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ
 BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ MÜHENDİSLİKTE DENEYSEL METOTLAR II ZAMANA BAĞLI ISI İLETİMİ 1.Deneyin Adı: Zamana bağlı ısı iletimi. 2. Deneyin
BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE VE İMALAT MÜHENDİSLİĞİ BÖLÜMÜ MÜHENDİSLİKTE DENEYSEL METOTLAR II ZAMANA BAĞLI ISI İLETİMİ 1.Deneyin Adı: Zamana bağlı ısı iletimi. 2. Deneyin
Elemanlardaki İç Kuvvetler
 Elemanlardaki İç Kuvvetler Bölüm Öğrenme Çıktıları Yapı elemanlarında oluşan iç kuvvetler. Eksenel kuvvet, Kesme kuvvet ve Eğilme Momenti Denklemleri ve Diyagramları. Bölüm Öğrenme Çıktıları Elemanlarda
Elemanlardaki İç Kuvvetler Bölüm Öğrenme Çıktıları Yapı elemanlarında oluşan iç kuvvetler. Eksenel kuvvet, Kesme kuvvet ve Eğilme Momenti Denklemleri ve Diyagramları. Bölüm Öğrenme Çıktıları Elemanlarda