... rref = 0; lref = 0 f cmu_mx <= 40 Then ' Fuzzy Table-Left l_cmu = ((40 - cmu_mx) * 100) / 40 rref = rref + (20 * l_cmu) / 100 End If If cmu_mx >=
|
|
|
- Temel Karaca
- 8 yıl önce
- İzleme sayısı:
Transkript
 / 40 lref = lref + (20 * r_cmu) / 100 End If.")
1 ... rref = 0; lref = 0 f cmu_mx <= 40 Then ' Fuzzy Table-Left l_cmu = ((40 - cmu_mx) * 100) / 40 rref = rref + (20 * l_cmu) / 100 End If If cmu_mx >= 40 Then 'Fuzzy Table-Right r_cmu = ((cmu_mx - 40) * 100) / 40 lref = lref + (20 * r_cmu) / 100 End If... 'Fuzzy Table Middle If cmu_mx >= 20 And cmu_mx <= 60 Then If cmu_mx < 40 Then m_cmu = ((cmu_mx - 20) * 100) / 20 Else m_cmu = ((60 - cmu_mx) * 100) / 20 End If rref = rref + (50 * m_cmu) / 100 lref = lref + (40 * m_cmu) / 100 End If...
 * 100) / 20 Else")

2 2


3 Kapalı devre kontrol elemanlarının tanıtılmasından yola çıkılarak, gezgin robotlarda kontrol ve kontrolcüye bağlı algoritma oluşturma teknikleri ile yazılım algoritmasının oluşturulması anlatılacaktır. #include <stdlib.h> #include <stdio.h> typedef int BOOL; typedef char CHAR; typedef int INT; #define FALSE 0 #define TRUE 1 #define NOT! 3


4

5 PC, PLC, PIC, Mikro İşlemci, PC104, Gömülü Bilgisayarlar, Elektronik Kartlar... Motorlar, Silindirler, hareket elemanları... Girdi + - Kontrol Elemanı Aktivasyon Elemanı Çıktı Ölçme Elemanı (algılayıcılar) Proses İvme, Açı, Hız, Akış,Encoders, Kuvvet, Yük, Pozisyon, Basınç, Sıcaklık, Eğim, Burulma, Titreşim Ölçüm Elemanları sıcaklık kontrolü, makinanın hız kontrolü, kimyasal olaylar, üretimde bir aşama ya da kendisini ifade eder,... 5

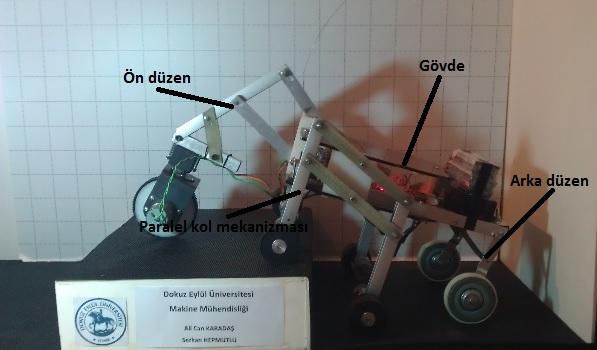
6 * insansı robotlar Gezgin robot, statik robot manipülatörlerin tersine bir yere sabit kalmadan işlevi doğrultusunda hareket edebilen robotlardır. * Gezgin Robot Kol Sistemleri * R2D2, Yıldız Savaşları astro mekanik droidi. * ABD Patent Bürosu ndan alınmıştır. * Honda nın insansı robotunun gelişim süreci. 6


7 7
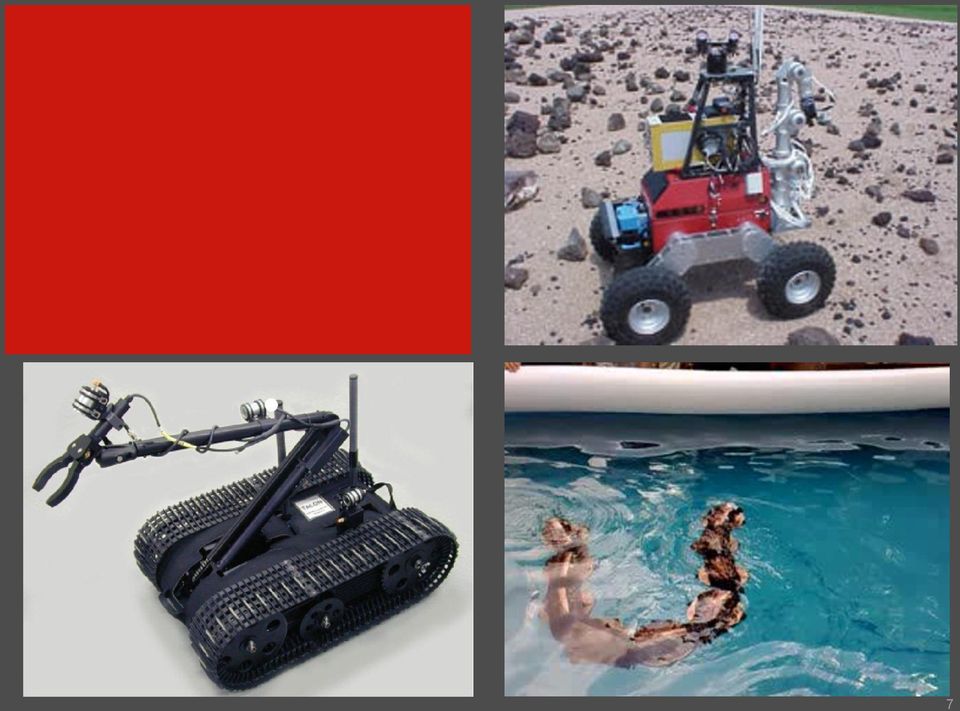
8 Karar verme yeteneğine sahip bir robot yapmaya çalışmak zor bir hedefin başlangıcıdır. Etrafındakilerin farkına varabilecek ve buna göre karar veren bir araç imalatı ise daha zor bir hedeftir. Otonom gezgin (mobil) robotların temel amacı, insana ihtiyaç duymadan hareket ederek ulaşması istenilen hedefe, yolda etrafına çarpmadan ve önüne çıkabilecek çeşitli engelleri kendi karar mekanizmasını kullanarak geçebilmesidir. Karar mekanizmasını etkileyecek parametreler oldukça değişken olacağından, aracın kontrol biriminin öğrenebilme yeteneğine sahip olması gerekmektedir. Bu aşamada işlevsellik, aracın kontrol algoritmasının işlevselliğiyle doğrudan ilgilidir. * A.Gören, Yapay Sinir Ağları ile Otonom Gezgin Robot Kontrolü ve Uygulamaları, Endüstri ve Otomasyon,

9 9

10 10
11 11

12 12

13 Taşıt 1: En basit taşıttır, daima ileri mantıklıdır. Tek motor ve tek sensörlüdür. 13

 Sensörler direkt bağlı, (b) Sensörler çapraz bağlı.")
14 Taşıt 2: Korku ve hücum. İki motor ve iki sensörlüdür. (a) Sensörler direkt bağlı, (b) Sensörler çapraz bağlı. Uyarıcıdır (artı etkiye sahiptir). 14


15 Taşıt 3: Sevgi. Yasaklayıcıdır (eksi etkiye sahiptir). 15
. 15")
16 Taşıt 4: Çeşitli sensörler ve birçok motor bağlanmıştır. Karışık davranış gösterir. -sıcaklık, basınç, ultrasonik, lazer, mesafe sensörleri, kamera, gps, dijital pusula, gyroscope, değişik birçok algılayıcı 16

17 17

18 18
19 L:Left ML:Medium Left M:Medium MR:Medium Right R:Right Z:Zero S:Slow M:Medium F:Fast Z:Zero S:Slow M:Medium F:Fast L Z Z ML S M M MR Target location on image [pixels] Left motor velocity [unit] S M Right motor velocity [unit] 1 F F R Bulanık mantığın temeli bulanık küme ve alt kümelere dayanır. Klasik yaklaşımda bir varlık ya kümenin elemanıdır ya da değildir. Matematiksel olarak ifade edildiğinde varlık küme ile olan üyelik ilişkisi bakımından kümenin elemanı olduğunda "1", kümenin elemanı olmadığı zaman "0" değerini alır. Bulanık mantık klasik küme gösteriminin genişletilmesidir. Bulanık varlık kümesinde her bir varlığın üyelik derecesi vardır. Varlıkların üyelik derecesi, (0, 1) aralığında herhangi bir değer olabilir ve üyelik fonksiyonu M(x) ile gösterilir. Örnek olarak normal oda sıcaklığını 23 derece olarak kabul edersek klasik küme kuramına göre 23 derecenin üzerindeki sıcaklık derecelerini sıcak olarak kabul ederiz ve bu derecelerin sıcak kümesindeki üyelik dereceleri "1" olur. 23 altındaki sıcaklık dereceleri ise soğuktur ve sıcak kümesindeki üyelik dereceleri "0" olur. Soğuk kümesini temel aldığımızda bu değerler tersine döner. Bulanık küme yaklaşımında üyelik değerleri [0,1] aralığında değerler almaktadır. Örneğin 14 derecelik sıcaklık için üyelik derecesi "0", 23 sıcaklık derecesi için üyelik değeri "0,25" olabilir. Bulanık Mantık


20 Bulanık Mantık Kaşık Ka-tal Çatal

21 Üyelik Fonksiyonları Giriş Çıkış Bulanık kurallar (if > then) Kesin Çıkış (i) Bulanıklaştırma (ii) BM Sonuç Çıkarma (iii) Çözümleme İşlem Kesin Giriş
22 Sol Orta Sağ VL VR Hedefe ulaşmaya çalışan gezgin robotun sağ ve sol tekerlek hızlarını BM ile bulma.

23
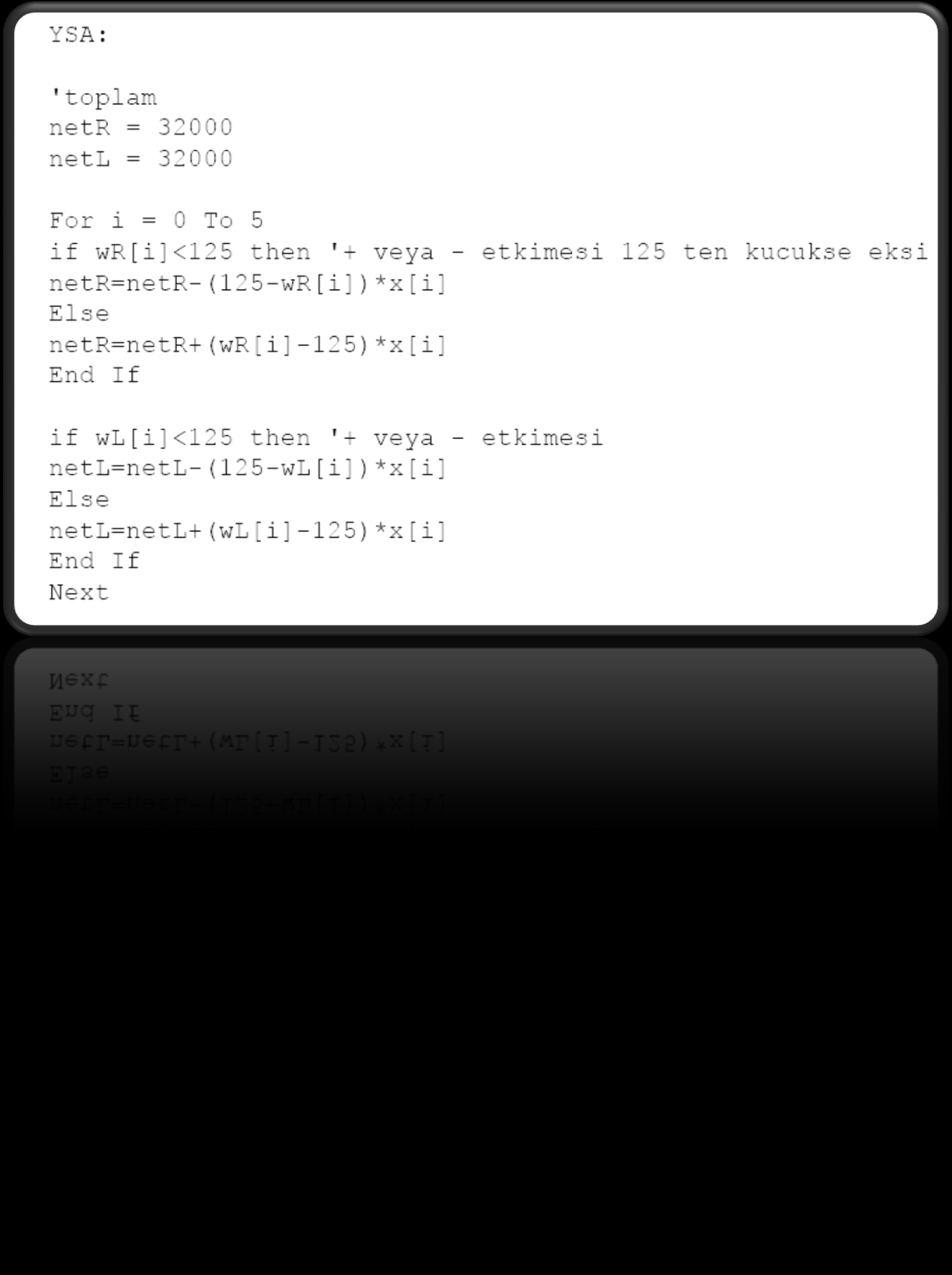
24 Sağ Motor Hızı Sol Motor Hızı.... rref = 0; lref = 0 If cmu_mx <= 40 Then ' Fuzzy Table-Left l_cmu = ((40 - cmu_mx) * 100) / 40 rref = rref + (20 * l_cmu) / 100 End If If cmu_mx >= 40 Then 'Fuzzy Table-Right r_cmu = ((cmu_mx - 40) * 100) / 40 lref = lref + (20 * r_cmu) / 100 End If... 'Fuzzy Table Middle If cmu_mx >= 20 And cmu_mx <= 60 Then If cmu_mx < 40 Then m_cmu = ((cmu_mx - 20) * 100) / 20 Else m_cmu = ((60 - cmu_mx) * 100) / 20 End If rref = rref + (50 * m_cmu) / 100 lref = lref + (40 * m_cmu) / 100 End If...
25
26 Biyolojik İnsan sinir hücrelerinden hücresi incelendiğinde esinlenilerek temel oluşturulan dört bölümden hesaplama mantığı ise yapay meydana sinir geldiği ağları (YSA) görülür. olarak Bunlar; adlandırılmaktadır. 1- Girdileri kabul Her eden bir girdi (X1, X2,, dentridler, Xn) veya 2- yapay Girdileri sinir işleyen hücresi, soma, belirli 3-Girdileri diğer bir çıktılara hücreye ya da hücrelere çeviren aralarındaki akson ve 4- bağın Bir sonraki etki derecesini hücreye belirleyen geçişi sağlayan katsayılarla bağlıdır. sinapslardır. Ağırlıklar olarak adlandırılan bu katsayılar (W1, W2,, Wn), programda döngü lerle yenilenerek kendi kendine ayarlanır. Böylece, sonuçta uygun çıkışı veren toplam ağ öğrenmiş olur. Yapay Sinir Ağları

27 x 1 Bias input = 1 x 1 Bias input = 1 x 2 w 2 w 1 w 0 =Θ x 2 w 2 w 1 w 0 =Θ x 3 w 3 R f V L x 3 w 3 R f V R w 4 nonlinearity w 4 nonlinearity x 4 w 5 w 6 x 4 w 5 w 6 x 5 x 6 x 5 x 6 Ultrasonik sensör çıkışları: x 1, x 2, x 3, x 4, x 5, x 6 ; Sol ve sağ tekerlek hızları: v L, v R ; Perseptron en basit ileri beslemeli eğiticili sinir ağı olarak alınabilir. Perseptron doğrusal ikili düzen sınıflandırıcıdır ve girdileri olan x leri f(x) değerlerine sınıflandırır. x ikilik düzende bir vektör iken f(x) tek bir ikilik değerdir.
28
29
30
31
32 Mobil bir robotun yolunu bulmasında ya da etrafını tanımasında sıkça kullanılan yöntemlerdendir. Çözüm hakkında bilgi ikilik düzende kromozom olarak kodlanır. Kromozom Kromozom Genetik Algoritmalar

33 Bir önceki aşamada rastlantısal seçilen kromozomlardan rastlantısal olarak seçilen genler kromozom1 ve kromozom2 arasında çapraz değiştirilir. Robotun doğru hareketi yapıp yapmadığı kontrol edilir ve sonuca göre bu değişim devam eder. Kromozom Kromozom Yeni Nesil Yeni Nesil Çaprazlama

34 Lokal optimum noktalarda kalmamak için yeni nesil kromozomlarından rastlantısal olarak bir değişiklik yapılır. Çözüm performansı incelenir (örneğin, robotun yolunu bulma süresi gibi). Performans azalması/artmasına göre lokal optimal noktada bulunup bulunmadığı anlaşılır. Özgün yeni nesil Özgün yeni nesil Mutasyonlu YN Mutasyonlu YN Mutasyon
35 Robo Cup
36 ilginize tesekkürler. Sorularınız?
37 Wikipedia: Veesta Automation: Siemens Automation websitesi: A.Gören, Controlling a Non-Holonomic Vehicle via Artificial Neural Networks, doktora tezi, DEÜ-FBE, 2007.
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ. Ders 1- Yapay Zekâya Giriş. Erhan AKDOĞAN, Ph.D.
 Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Esnek Hesaplamaya Giriş
 Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
İlk Yapay Sinir Ağları. Dr. Hidayet Takçı
 İlk Yapay Sinir Ağları Dr. Hidayet htakci@gmail.com http://htakci.sucati.org Tek katmanlı algılayıcılar (TKA) Perceptrons (Rosenblat) ADALINE/MADALINE (Widrow and Hoff) 2 Perseptron eptronlar Basit bir
İlk Yapay Sinir Ağları Dr. Hidayet htakci@gmail.com http://htakci.sucati.org Tek katmanlı algılayıcılar (TKA) Perceptrons (Rosenblat) ADALINE/MADALINE (Widrow and Hoff) 2 Perseptron eptronlar Basit bir
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Genetik Algoritma (Genetic Algorithm) Doç.Dr. M. Ali Akcayol Genetik Algoritma 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik
Zeki Optimizasyon Teknikleri Genetik Algoritma (Genetic Algorithm) Doç.Dr. M. Ali Akcayol Genetik Algoritma 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik
GENETİK ALGORİTMA ÖZNUR CENGİZ HİLAL KOCA
 GENETİK ALGORİTMA ÖZNUR CENGİZ 201410306014 HİLAL KOCA 150306024 GENETİK ALGORİTMA Genetik Algoritma yaklaşımının ortaya çıkışı 1970 lerin başında olmuştur. 1975 te John Holland ın makine öğrenmesi üzerine
GENETİK ALGORİTMA ÖZNUR CENGİZ 201410306014 HİLAL KOCA 150306024 GENETİK ALGORİTMA Genetik Algoritma yaklaşımının ortaya çıkışı 1970 lerin başında olmuştur. 1975 te John Holland ın makine öğrenmesi üzerine
GENETİK ALGORİTMALAR. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 GENETİK ALGORİTMALAR Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ GENETİK ALGORİTMALAR Genetik algoritmalar, Darwin in doğal seçim ve evrim teorisi ilkelerine dayanan bir arama ve optimizasyon yöntemidir.
GENETİK ALGORİTMALAR Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ GENETİK ALGORİTMALAR Genetik algoritmalar, Darwin in doğal seçim ve evrim teorisi ilkelerine dayanan bir arama ve optimizasyon yöntemidir.
YAPAY SİNİR AĞLARI. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ
 YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
YAPAY SİNİR AĞLARI Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ İÇERİK Sinir Hücreleri Yapay Sinir Ağları Yapısı Elemanları Çalışması Modelleri Yapılarına Göre Öğrenme Algoritmalarına Göre Avantaj ve
Yapay Sinir Ağları. (Artificial Neural Networks) DOÇ. DR. ERSAN KABALCI
 DOÇ. DR. ERSAN KABALCI") Yapay Sinir Ağları (Artificial Neural Networks) J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Yapay Sinir Ağları Tarihçe Biyolojik
Yapay Sinir Ağları (Artificial Neural Networks) J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Yapay Sinir Ağları Tarihçe Biyolojik
Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım. Mehmet Ali Aytekin Tahir Emre Kalaycı
 Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım Mehmet Ali Aytekin Tahir Emre Kalaycı Gündem Gezgin Satıcı Problemi GSP'yi Çözen Algoritmalar Genetik Algoritmalar
Gezgin Satıcı Probleminin İkili Kodlanmış Genetik Algoritmalarla Çözümünde Yeni Bir Yaklaşım Mehmet Ali Aytekin Tahir Emre Kalaycı Gündem Gezgin Satıcı Problemi GSP'yi Çözen Algoritmalar Genetik Algoritmalar
YZM 5257 YAPAY ZEKA VE UZMAN SİSTEMLER DERS#6: GENETİK ALGORİTMALAR
 YZM 5257 YAPAY ZEKA VE UZMAN SİSTEMLER DERS#6: GENETİK ALGORİTMALAR Sınıflandırma Yöntemleri: Karar Ağaçları (Decision Trees) Örnek Tabanlı Yöntemler (Instance Based Methods): k en yakın komşu (k nearest
YZM 5257 YAPAY ZEKA VE UZMAN SİSTEMLER DERS#6: GENETİK ALGORİTMALAR Sınıflandırma Yöntemleri: Karar Ağaçları (Decision Trees) Örnek Tabanlı Yöntemler (Instance Based Methods): k en yakın komşu (k nearest
H1 - Otomatik Kontrol Kavramı ve Örnek Devreler. Yrd. Doç. Dr. Aytaç Gören
 H1 - Otomatik Kontrol Kavramı ve Örnek Devreler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04
H1 - Otomatik Kontrol Kavramı ve Örnek Devreler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
Zeki Optimizasyon Teknikleri Ara sınav - 25% Ödev (Haftalık) - 10% Ödev Sunumu (Haftalık) - 5% Final (Proje Sunumu) - 60% - Dönem sonuna kadar bir optimizasyon tekniğiyle uygulama geliştirilecek (Örn:
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL Transdüser ve Sensör Kavramı Fiziksel ortam değişikliklerini (ısı, ışık, basınç, ses, vb.) algılayan elemanlara sensör, algıladığı bilgiyi elektrik enerjisine çeviren elemanlara
Sensörler Yrd.Doç.Dr. İlker ÜNAL Transdüser ve Sensör Kavramı Fiziksel ortam değişikliklerini (ısı, ışık, basınç, ses, vb.) algılayan elemanlara sensör, algıladığı bilgiyi elektrik enerjisine çeviren elemanlara
Araştırma Geliştirme Ltd. Şti. - Firma Tanıtım Sunumu -
 Araştırma Geliştirme Ltd. Şti. - Firma Tanıtım Sunumu - Şubat 2013 Hakkımızda Firma Profili Ekip Faaliyet Alanları Firma Profili Hakkımızda Bilim, Sanayi ve Teknoloji Bakanlığı nın 2012 Teknogirişim Sermaye
Araştırma Geliştirme Ltd. Şti. - Firma Tanıtım Sunumu - Şubat 2013 Hakkımızda Firma Profili Ekip Faaliyet Alanları Firma Profili Hakkımızda Bilim, Sanayi ve Teknoloji Bakanlığı nın 2012 Teknogirişim Sermaye
Nedir? Teorik Pratik Örnekler. Endüstriyel Otomasyon
 Nedir? Teorik Pratik Örnekler Endüstriyel Otomasyon Konular Endüstriyel Otomasyonun Tanımı Tarihçesi Teorik Otomasyonda Bilinmesi Gerekenler PLC (Programmable Logic Controller) Mikroişlemciler, PIC Gömülü
Nedir? Teorik Pratik Örnekler Endüstriyel Otomasyon Konular Endüstriyel Otomasyonun Tanımı Tarihçesi Teorik Otomasyonda Bilinmesi Gerekenler PLC (Programmable Logic Controller) Mikroişlemciler, PIC Gömülü
Genetik Algoritmalar. Bölüm 1. Optimizasyon. Yrd. Doç. Dr. Adem Tuncer E-posta:
 Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
Genetik Algoritmalar Bölüm 1 Optimizasyon Yrd. Doç. Dr. Adem Tuncer E-posta: adem.tuncer@yalova.edu.tr Optimizasyon? Optimizasyon Nedir? Eldeki kısıtlı kaynakları en iyi biçimde kullanmak olarak tanımlanabilir.
MEKATRONİĞİN TEMELLERİ
 MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
Çalışmamız (Ne Yaptık?) Materyal Metot (Nasıl Yaptık?) Uygulama (Demo) Deneysel Sonuçlar Teşekkür ve Sorular
 Materyal Metot (Nasıl Yaptık?) Uygulama (Demo) Deneysel Sonuçlar Teşekkür ve Sorular") Çalışmamız (Ne Yaptık?) Materyal Metot (Nasıl Yaptık?) Uygulama (Demo) Deneysel Sonuçlar Teşekkür ve Sorular Kinect Sensör Kullanıcı Denetimi 3D Yapay Zekâ Teknikleri Yapılan bu çalışma Kinect sensörden
Çalışmamız (Ne Yaptık?) Materyal Metot (Nasıl Yaptık?) Uygulama (Demo) Deneysel Sonuçlar Teşekkür ve Sorular Kinect Sensör Kullanıcı Denetimi 3D Yapay Zekâ Teknikleri Yapılan bu çalışma Kinect sensörden
Genetik Algoritmalar (GA) Genetik Algoritmalar Đçerik Nesin Matematik Köyü E rim Ç lı l ş ı ta t yı Nisan, 2012 Mustafa Suphi Erden
 Genetik Algoritmalar Đçerik Nesin Matematik Köyü E rim Ç lı l ş ı ta t yı Nisan, 2012 Mustafa Suphi Erden") Genetik Algoritmalar Nesin Matematik Köyü Evrim Çalıştayı 20-23 Nisan, 202 Genetik Algoritmalar (GA Đçerik Biyolojiden esinlenme GA nın özellikleri GA nın unsurları uygulama Algoritma Şema teoremi Mustafa
Genetik Algoritmalar Nesin Matematik Köyü Evrim Çalıştayı 20-23 Nisan, 202 Genetik Algoritmalar (GA Đçerik Biyolojiden esinlenme GA nın özellikleri GA nın unsurları uygulama Algoritma Şema teoremi Mustafa
METASEZGİSEL YÖNTEMLER. Genetik Algoritmalar
 METASEZGİSEL YÖNTEMLER Genetik Algoritmalar 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik Genetik Algoritma Algoritma Uygulamaları üzerine klasik eser
METASEZGİSEL YÖNTEMLER Genetik Algoritmalar 1970 li yıllarda John Holland tarafından geliştirilmiştir. 1989 yılında David E. Goldberg Genetik Genetik Algoritma Algoritma Uygulamaları üzerine klasik eser
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
Algoritma Geliştirme ve Veri Yapıları 2 Veri Modelleri. Mustafa Kemal Üniversitesi
 Algoritma Geliştirme ve Veri Yapıları 2 Veri Modelleri Veri modelleri, veriler arasında ilişkisel ve sırasal düzeni gösteren kavramsal tanımlardır. Her program en azından bir veri modeline dayanır. Uygun
Algoritma Geliştirme ve Veri Yapıları 2 Veri Modelleri Veri modelleri, veriler arasında ilişkisel ve sırasal düzeni gösteren kavramsal tanımlardır. Her program en azından bir veri modeline dayanır. Uygun
BULANIK MANTIK ile KONTROL
 BULANIK MANTIK ile KONTROL AFYON KOCATEPE ÜNİVERSİTESİ Bulanık mantığın temel prensipleri: Bulanık küme sözel değişkenleri göstermek için kullanılır. Az sıcak, biraz soğuk gibi bulanık mantık üyelik fonksiyonları
BULANIK MANTIK ile KONTROL AFYON KOCATEPE ÜNİVERSİTESİ Bulanık mantığın temel prensipleri: Bulanık küme sözel değişkenleri göstermek için kullanılır. Az sıcak, biraz soğuk gibi bulanık mantık üyelik fonksiyonları
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş
 Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Mekatronik MK-421 4/Bahar (3+1+0) 3,5 5
 3,5 5") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-421 4/Bahar (3+1+0) 3,5 5 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-421 4/Bahar (3+1+0) 3,5 5 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Mekatronik MK-426 4/Bahar (2+0+0) 2 3
 2 3") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-426 4/Bahar (2+0+0) 2 3 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Mekatronik MK-426 4/Bahar (2+0+0) 2 3 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
Zeki Optimizasyon Teknikleri
 Zeki Optimizasyon Teknikleri Yapay Sinir Ağları (Artificial Neural Network) Doç.Dr. M. Ali Akcayol Yapay Sinir Ağları Biyolojik sinir sisteminden esinlenerek ortaya çıkmıştır. İnsan beyninin öğrenme, eski
Zeki Optimizasyon Teknikleri Yapay Sinir Ağları (Artificial Neural Network) Doç.Dr. M. Ali Akcayol Yapay Sinir Ağları Biyolojik sinir sisteminden esinlenerek ortaya çıkmıştır. İnsan beyninin öğrenme, eski
UYGULAMALI MEKATRONİK PLC EĞİTİM SÜRECİ VE İÇERİĞİ
 Verilen eğitimin amacı; UYGULAMALI MEKATRONİK PLC EĞİTİM SÜRECİ VE İÇERİĞİ Tekstil makineleri, Gıda makineleri, Paketleme makineleri, Soğutma sistemleri ve birçok prosesin otomasyon sistemlerinde kullanılan
Verilen eğitimin amacı; UYGULAMALI MEKATRONİK PLC EĞİTİM SÜRECİ VE İÇERİĞİ Tekstil makineleri, Gıda makineleri, Paketleme makineleri, Soğutma sistemleri ve birçok prosesin otomasyon sistemlerinde kullanılan
Musa DEMİRCİ. KTO Karatay Üniversitesi. Konya - 2015
 Musa DEMİRCİ KTO Karatay Üniversitesi Konya - 2015 1/46 ANA HATLAR Temel Kavramlar Titreşim Çalışmalarının Önemi Otomatik Taşıma Sistemi Model İyileştirme Süreci Modal Analiz Deneysel Modal Analiz Sayısal
Musa DEMİRCİ KTO Karatay Üniversitesi Konya - 2015 1/46 ANA HATLAR Temel Kavramlar Titreşim Çalışmalarının Önemi Otomatik Taşıma Sistemi Model İyileştirme Süreci Modal Analiz Deneysel Modal Analiz Sayısal
GENETİK ALGORİTMALAR BÜŞRA GÜRACAR
 GENETİK ALGORİTMALAR BÜŞRA GÜRACAR 201420404036 İÇERİK Genetik Algoritmanın, Amacı Kullanım Alanları Kavramları Uygulama Adımları Parametreler Genetik Algoritma Kodlama Türleri Genetik Algoritma Genetik
GENETİK ALGORİTMALAR BÜŞRA GÜRACAR 201420404036 İÇERİK Genetik Algoritmanın, Amacı Kullanım Alanları Kavramları Uygulama Adımları Parametreler Genetik Algoritma Kodlama Türleri Genetik Algoritma Genetik
BAŞKENT ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ BENZER SÜREÇLERDE ÜRETİLEN ÜRÜNLER İÇİN YAPAY ZEKA İLE ZAMAN TAHMİNİ SONER ŞÜKRÜ ALTIN
 BAŞKENT ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ BENZER SÜREÇLERDE ÜRETİLEN ÜRÜNLER İÇİN YAPAY ZEKA İLE ZAMAN TAHMİNİ SONER ŞÜKRÜ ALTIN YÜKSEK LİSANS TEZİ 2011 BENZER SÜREÇLERDE ÜRETİLEN ÜRÜNLER İÇİN YAPAY
BAŞKENT ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ BENZER SÜREÇLERDE ÜRETİLEN ÜRÜNLER İÇİN YAPAY ZEKA İLE ZAMAN TAHMİNİ SONER ŞÜKRÜ ALTIN YÜKSEK LİSANS TEZİ 2011 BENZER SÜREÇLERDE ÜRETİLEN ÜRÜNLER İÇİN YAPAY
CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI
 CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI Kuruluş Amacı Celal Bayar Üniversitesi Elektrik-Elektronik Mühendisliği Kontrol
CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI Kuruluş Amacı Celal Bayar Üniversitesi Elektrik-Elektronik Mühendisliği Kontrol
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar
 7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
7. Bölüm Robot Programlamada Mantıksal Fonksiyonlar 7. Bölüm: Mantıksal Fonksiyonlar 7.1. Mantıksal Programlamanın Temelleri Endüstriyel Robot sisteminde çevre birimlerle olan iletişimin sağlanmasında
Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ANKARA
 GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ANKARA") i GENETİK ALGORİTMA YAKLAŞIMIYLA ATÖLYE ÇİZELGELEME Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ OCAK 2005 ANKARA ii Serdar BİROĞUL tarafından hazırlanan
i GENETİK ALGORİTMA YAKLAŞIMIYLA ATÖLYE ÇİZELGELEME Serdar BİROĞUL YÜKSEK LİSANS TEZİ (ELEKTRİK EĞİTİMİ) GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ OCAK 2005 ANKARA ii Serdar BİROĞUL tarafından hazırlanan
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
 17.05.2014 Sayfa 1 Curve Fitting with RBS Functional Networks RBS fonksiyonel ağı ile eğri uygunluğu Andr es Iglesias, Akemi G alvez Department of Applied Mathematics and Computational Sciences, University
17.05.2014 Sayfa 1 Curve Fitting with RBS Functional Networks RBS fonksiyonel ağı ile eğri uygunluğu Andr es Iglesias, Akemi G alvez Department of Applied Mathematics and Computational Sciences, University
Google Maps ve Genetik Algoritmalarla GSP Çözümü İçin Öneri
 Google Maps ve Genetik Algoritmalarla GSP Çözümü İçin Öneri Onur KARASOY 1, Serkan BALLI 2 1 Muğla Sıtkı Koçman Üniversitesi Bilgi İşlem Dairesi Başkanlığı 2 Muğla Sıtkı Koçman Üniversitesi Bilişim Sistemleri
Google Maps ve Genetik Algoritmalarla GSP Çözümü İçin Öneri Onur KARASOY 1, Serkan BALLI 2 1 Muğla Sıtkı Koçman Üniversitesi Bilgi İşlem Dairesi Başkanlığı 2 Muğla Sıtkı Koçman Üniversitesi Bilişim Sistemleri
BULANIK MANTIK (FUZZY LOGIC)
") BULANIK MANTIK (FUZZY LOGIC) Bulanık mantık ilk olarak 1965 yılında Lütfü Aliasker Zade nin yayınladığı bir makalenin sonucu oluşmuş bir mantık yapısıdır ve yayınladığı Fuzzy Sets makalesinde bulanık kümelerin
BULANIK MANTIK (FUZZY LOGIC) Bulanık mantık ilk olarak 1965 yılında Lütfü Aliasker Zade nin yayınladığı bir makalenin sonucu oluşmuş bir mantık yapısıdır ve yayınladığı Fuzzy Sets makalesinde bulanık kümelerin
ENTEK TEKNOLOJİ EĞİTİMLERİ
 ENTEK TEKNOLOJİ EĞİTİMLERİ HIDR HİDROLİK TEKNOLOJİSİ EĞİTİMİ o Hidrolik devre elemanlarını tanımak ve çalışma prensiplerini öğrenmek o Uluslararası standartlara göre hidrolik devre şeması çizebilmek ve
ENTEK TEKNOLOJİ EĞİTİMLERİ HIDR HİDROLİK TEKNOLOJİSİ EĞİTİMİ o Hidrolik devre elemanlarını tanımak ve çalışma prensiplerini öğrenmek o Uluslararası standartlara göre hidrolik devre şeması çizebilmek ve
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR
 OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
OTOMATİK KONTROL SİSTEMLERİ TEMEL KAVRAMLAR VE TANIMLAR KONTROL SİSTEMLERİ GİRİŞ Son yıllarda kontrol sistemleri, insanlığın ve uygarlığın gelişme ve ilerlemesinde çok önemli rol oynayan bir bilim dalı
Neden Endüstri Mühendisliği Bölümünde Yapmalısınız?
 Lisansüstü Eğitiminizi Neden Endüstri Mühendisliği Bölümünde Yapmalısınız? Uludağ Üniversitesi Mühendislik-Mimarlık Fakültesi Endüstri Mühendisliği Bölümü, 1990 yılında kurulmuş ve ilk mezunlarını 1994
Lisansüstü Eğitiminizi Neden Endüstri Mühendisliği Bölümünde Yapmalısınız? Uludağ Üniversitesi Mühendislik-Mimarlık Fakültesi Endüstri Mühendisliği Bölümü, 1990 yılında kurulmuş ve ilk mezunlarını 1994
4. Bulanık Sayılar- Üyelik Fonksiyonları
 4. Bulanık Sayılar- Üyelik Fonksiyonları Bulanık Sayı Normal ve dışbükey bir bulanık kümenin alfa kesimi kapalı bir küme ise bulanık sayı olarak adlandırılmaktadır. Her bulanık sayı dış bükey bir bulanık
4. Bulanık Sayılar- Üyelik Fonksiyonları Bulanık Sayı Normal ve dışbükey bir bulanık kümenin alfa kesimi kapalı bir küme ise bulanık sayı olarak adlandırılmaktadır. Her bulanık sayı dış bükey bir bulanık
Alıştırma 1: Yineleme
 Alıştırma 1: Yineleme Alıştırma 2: Yineleme H10->H2 çevrimini yapınız 7 2 1 3 2 1 1 1 2 0 Hafta 3: Yineleme Alıştırmaları(1) E1. (44/174) S değerini yineleme kullanarak hesap ediniz S = 1 + 2 + 3 + n Hafta3:
Alıştırma 1: Yineleme Alıştırma 2: Yineleme H10->H2 çevrimini yapınız 7 2 1 3 2 1 1 1 2 0 Hafta 3: Yineleme Alıştırmaları(1) E1. (44/174) S değerini yineleme kullanarak hesap ediniz S = 1 + 2 + 3 + n Hafta3:
Sayı sistemleri-hesaplamalar. Sakarya Üniversitesi
 Sayı sistemleri-hesaplamalar Sakarya Üniversitesi Sayı Sistemleri - Hesaplamalar Tüm sayı sistemlerinde sayılarda işaret kullanılabilir. Yani pozitif ve negatif sayılarla hesaplama yapılabilir. Bu gerçek
Sayı sistemleri-hesaplamalar Sakarya Üniversitesi Sayı Sistemleri - Hesaplamalar Tüm sayı sistemlerinde sayılarda işaret kullanılabilir. Yani pozitif ve negatif sayılarla hesaplama yapılabilir. Bu gerçek
X ve Y boş olmayan iki küme olsun. İki küme arasında tanımlanmış olan bir bulanık ilişki R, X x Y nin bir bulanık alt kümesidir.
 Bulanık İlişkiler X ve Y boş olmayan iki küme olsun. İki küme arasında tanımlanmış olan bir bulanık ilişki R, X x Y nin bir bulanık alt kümesidir. R F(X x Y) Eğer X = Y ise R bir ikilik (binary) bulanık
Bulanık İlişkiler X ve Y boş olmayan iki küme olsun. İki küme arasında tanımlanmış olan bir bulanık ilişki R, X x Y nin bir bulanık alt kümesidir. R F(X x Y) Eğer X = Y ise R bir ikilik (binary) bulanık
Yapay Zeka ya giris. Yapay sinir aglari ve bulanik mantik. Uzay CETIN. Université Pierre Marie Curie (Paris VI),
,") Yapay Zeka ya giris Yapay sinir aglari ve bulanik mantik Uzay CETIN Université Pierre Marie Curie (Paris VI), Master 2 Recherche, Agents Intelligents, Apprentissage et Décision (AIAD) November 11, 2008
Yapay Zeka ya giris Yapay sinir aglari ve bulanik mantik Uzay CETIN Université Pierre Marie Curie (Paris VI), Master 2 Recherche, Agents Intelligents, Apprentissage et Décision (AIAD) November 11, 2008
LAZER SENSÖRLERLE BİR ROBOTUN DOĞAL FREKANSLARININ VE STATİK ÇÖKMELERİNİN ÖLÇÜMÜ
 327 LAZER SENSÖRLERLE BİR ROBOTUN DOĞAL FREKANSLARININ VE STATİK ÇÖKMELERİNİN ÖLÇÜMÜ Zeki KIRAL Murat AKDAĞ Levent MALGACA Hira KARAGÜLLE ÖZET Robotlar, farklı konumlarda farklı direngenliğe ve farklı
327 LAZER SENSÖRLERLE BİR ROBOTUN DOĞAL FREKANSLARININ VE STATİK ÇÖKMELERİNİN ÖLÇÜMÜ Zeki KIRAL Murat AKDAĞ Levent MALGACA Hira KARAGÜLLE ÖZET Robotlar, farklı konumlarda farklı direngenliğe ve farklı
: ODTÜ Kent Konukevi - 1 Daire:101/5 ODTÜ Kampüsü Üniversiteler Mah. Dumlupınar Blv. No:1. 06800 Çankaya-Ankara, Türkiye
 GENEL BİLGİLER Adı ve Soyadı : Hasan İhsan TURHAN Doğum Yeri ve Tarihi : Eskişehir / 18.09.1987 Askerlik Durumu : Yapıldı/Muaf Ehliyet : B Sınıfı Uyruğu : TC Medeni Hali : Bekar Adres : ODTÜ Kent Konukevi
GENEL BİLGİLER Adı ve Soyadı : Hasan İhsan TURHAN Doğum Yeri ve Tarihi : Eskişehir / 18.09.1987 Askerlik Durumu : Yapıldı/Muaf Ehliyet : B Sınıfı Uyruğu : TC Medeni Hali : Bekar Adres : ODTÜ Kent Konukevi
CBS ve Coğrafi Hesaplama
 Yıldız Teknik Üniversitesi CBS ve Coğrafi Hesaplama 2. Bölüm Yrd. Doç. Dr. Alper ŞEN Harita Mühendisliği Bölümü Kartografya Anabilim Dalı web: http://www.yarbis.yildiz.edu.tr/alpersen/ E mail: alpersen@yildiz.edu.tr
Yıldız Teknik Üniversitesi CBS ve Coğrafi Hesaplama 2. Bölüm Yrd. Doç. Dr. Alper ŞEN Harita Mühendisliği Bölümü Kartografya Anabilim Dalı web: http://www.yarbis.yildiz.edu.tr/alpersen/ E mail: alpersen@yildiz.edu.tr
PROGRAMLAMAYA GİRİŞ FONKSİYONLAR
 PROGRAMLAMAYA GİRİŞ FONKSİYONLAR Fonksiyonlar C programlama dili fonksiyon olarak adlandırılan alt programların birleştirilmesi kavramına dayanır. Bir C programı bir ya da daha çok fonksiyonun bir araya
PROGRAMLAMAYA GİRİŞ FONKSİYONLAR Fonksiyonlar C programlama dili fonksiyon olarak adlandırılan alt programların birleştirilmesi kavramına dayanır. Bir C programı bir ya da daha çok fonksiyonun bir araya
Yaklaşık Düşünme Teorisi
 Yaklaşık Düşünme Teorisi Zadeh tarafından 1979 yılında öne sürülmüştür. Kesin bilinmeyen veya belirsiz bilgiye dayalı işlemlerde etkili sonuçlar vermektedir. Genellikle bir f fonksiyonu ile x ve y değişkeni
Yaklaşık Düşünme Teorisi Zadeh tarafından 1979 yılında öne sürülmüştür. Kesin bilinmeyen veya belirsiz bilgiye dayalı işlemlerde etkili sonuçlar vermektedir. Genellikle bir f fonksiyonu ile x ve y değişkeni
PLC (Programlanabilir Kontrol Cihazı) TABANLI SİSTEMLERİN İNTERNET ÜZERİNDEN İZLENMESİ
 TABANLI SİSTEMLERİN İNTERNET ÜZERİNDEN İZLENMESİ") PLC (Programlanabilir Kontrol Cihazı) TABANLI SİSTEMLERİN İNTERNET ÜZERİNDEN İZLENMESİ Derya Birant, Alp Kut Dokuz Eylül Üniversitesi Bilgisayar Mühendisliği Bölümü İÇERİK Giriş PLC nedir? PLC lerin Uygulama
PLC (Programlanabilir Kontrol Cihazı) TABANLI SİSTEMLERİN İNTERNET ÜZERİNDEN İZLENMESİ Derya Birant, Alp Kut Dokuz Eylül Üniversitesi Bilgisayar Mühendisliği Bölümü İÇERİK Giriş PLC nedir? PLC lerin Uygulama
İNÖNÜ ÜNİVERSİTESİ MÜH. FAK. BİLGİSAYAR MÜH. BÖL. ALGORİTMA VE PROGRAMLAMA 1 DERSİ LAB. ÖDEVİ
 İNÖNÜ ÜNİVERSİTESİ MÜH. FAK. BİLGİSAYAR MÜH. BÖL. ALGORİTMA VE PROGRAMLAMA 1 DERSİ LAB. ÖDEVİ AD SOYAD : TESLİM TARİHİ : OKUL NO : TESLİM SÜRESİ : 2 hafta Ödev No : 7 ****(ilk 3 soru çıktı üzerinde el
İNÖNÜ ÜNİVERSİTESİ MÜH. FAK. BİLGİSAYAR MÜH. BÖL. ALGORİTMA VE PROGRAMLAMA 1 DERSİ LAB. ÖDEVİ AD SOYAD : TESLİM TARİHİ : OKUL NO : TESLİM SÜRESİ : 2 hafta Ödev No : 7 ****(ilk 3 soru çıktı üzerinde el
Concept Learning. Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ. Yapay Zeka - Kavram Öğrenme
 Concept Learning Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ 1 İÇERİK Öğrenme Metotları Kavram Öğrenme Nedir? Terminoloji Find-S Algoritması Candidate-Elimination Algoritması List-Then Elimination Algoritması
Concept Learning Araş. Gör. Nesibe YALÇIN BİLECİK ÜNİVERSİTESİ 1 İÇERİK Öğrenme Metotları Kavram Öğrenme Nedir? Terminoloji Find-S Algoritması Candidate-Elimination Algoritması List-Then Elimination Algoritması
Proje Adı : MATLAB Real-Time Windows Target toolbox kullanımı ve ilişkili bir uygulama geliştirilmesi
 Proje Yöneticisi: Doç.Dr. Cihan KARAKUZU Proje Adı : MATLAB Real-Time Windows Target toolbox kullanımı ve ilişkili bir uygulama geliştirilmesi MATLAB Real-Time Windows Target toolbox kullanımının basit
Proje Yöneticisi: Doç.Dr. Cihan KARAKUZU Proje Adı : MATLAB Real-Time Windows Target toolbox kullanımı ve ilişkili bir uygulama geliştirilmesi MATLAB Real-Time Windows Target toolbox kullanımının basit
YENİLENEBİLİR ENERJİ KAYNAKLARI RÜZGAR ENERJİSİ SİSTEMLERİ Eğitim Merkezi Projesi
 YENİLENEBİLİR ENERJİ KAYNAKLARI RÜZGAR ENERJİSİ SİSTEMLERİ Eğitim Merkezi Projesi Konu Başlıkları Enerjide değişim Enerji sistemleri mühendisliği Rüzgar enerjisi Rüzgar enerjisi eğitim müfredatı Eğitim
YENİLENEBİLİR ENERJİ KAYNAKLARI RÜZGAR ENERJİSİ SİSTEMLERİ Eğitim Merkezi Projesi Konu Başlıkları Enerjide değişim Enerji sistemleri mühendisliği Rüzgar enerjisi Rüzgar enerjisi eğitim müfredatı Eğitim
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR SİSTEMLERİ LABORATUARI
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR SİSTEMLERİ LABORATUARI Lineer Ayrılabilen Paternlerin Yapay Sinir Ağı ile Sınıflandırılması 1. Biyolojik Sinirin Yapısı Bilgi işleme
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BİLGİSAYAR SİSTEMLERİ LABORATUARI Lineer Ayrılabilen Paternlerin Yapay Sinir Ağı ile Sınıflandırılması 1. Biyolojik Sinirin Yapısı Bilgi işleme
GridAE: Yapay Evrim Uygulamaları için Grid Tabanlı bir Altyapı
 GridAE: Yapay Evrim Uygulamaları için Grid Tabanlı bir Altyapı Erol Şahin Bilgisayar Mühendisliği Bölümü, Orta Doğu Teknik Üniversitesi Ankara, Türkiye 2. ULUSAL GRİD ÇALIŞTAYI, 1-2 Mart 2007, TÜBİTAK,
GridAE: Yapay Evrim Uygulamaları için Grid Tabanlı bir Altyapı Erol Şahin Bilgisayar Mühendisliği Bölümü, Orta Doğu Teknik Üniversitesi Ankara, Türkiye 2. ULUSAL GRİD ÇALIŞTAYI, 1-2 Mart 2007, TÜBİTAK,
Mekatronik Teknolojisi Programı. Kuruluş Yılı : 2015 Eğitime Başlama Yılı : Mezun Sayımız : 59
 Mekatronik Teknolojisi Programı Kuruluş Yılı : 2015 Eğitime Başlama Yılı : 2015 Mezun Sayımız : 59 Yer : Burdur Eğitim Süresi : 2 Yıl Puan Türü : YGS-1 Kontenjan : 50+50 (2017-2018) : Taban Puan 183,455
Mekatronik Teknolojisi Programı Kuruluş Yılı : 2015 Eğitime Başlama Yılı : 2015 Mezun Sayımız : 59 Yer : Burdur Eğitim Süresi : 2 Yıl Puan Türü : YGS-1 Kontenjan : 50+50 (2017-2018) : Taban Puan 183,455
Bölüm 3. Klasik Mantık ve Bulanık Mantık. Serhat YILMAZ 1
 Bölüm 3. Klasik Mantık ve Bulanık Mantık Serhat YILMAZ serhaty@kocaeli.edu.tr 1 Klasik Mantık ve Bulanık Mantık Bulanık kümeler, bulanık mantığa bulanıklık kazandırır. Bulanık kümelerde yürütme işini işleçler
Bölüm 3. Klasik Mantık ve Bulanık Mantık Serhat YILMAZ serhaty@kocaeli.edu.tr 1 Klasik Mantık ve Bulanık Mantık Bulanık kümeler, bulanık mantığa bulanıklık kazandırır. Bulanık kümelerde yürütme işini işleçler
Yapay Sinir Ağları (Artificial Neural Networks)
") Yapay Sinir Ağları (Artificial Neural Networks) Yapay Sinir Ağları (Artificial Neural Networks) Yapay Sinir Ağları (YSA) genelde doğrusal olmayanolaylarımodellememetodudur. Bir kuralı veya algoritması
Yapay Sinir Ağları (Artificial Neural Networks) Yapay Sinir Ağları (Artificial Neural Networks) Yapay Sinir Ağları (YSA) genelde doğrusal olmayanolaylarımodellememetodudur. Bir kuralı veya algoritması
YOLCULUK YARATIMININ YAPAY SİNİR AĞLARI İLE MODELLENMESİ MODELLING OF THE TRIP GENERATION WITH ARTIFICIAL NEURAL NETWORK
 YOLCULUK YARATIMININ YAPAY SİNİR AĞLARI İLE MODELLENMESİ * Nuran BAĞIRGAN 1, Muhammet Mahir YENİCE 2 1 Dumlupınar Üniversitesi, Mühendislik Fakültesi, İnşaat Mühendisliği Bölümü, Kütahya, nbagirgan@dumlupinar.edu.tr
YOLCULUK YARATIMININ YAPAY SİNİR AĞLARI İLE MODELLENMESİ * Nuran BAĞIRGAN 1, Muhammet Mahir YENİCE 2 1 Dumlupınar Üniversitesi, Mühendislik Fakültesi, İnşaat Mühendisliği Bölümü, Kütahya, nbagirgan@dumlupinar.edu.tr
Bulanık Mantık Denetleyicileri
 Bulanık Mantık Denetleyicileri Bulanık Çıkarım BULANIK ÇIKARIM İki-değerli mantık Çok-değerli mantık Bulanık mantık Bulanık kurallar Bulanık çıkarım Bulanık anlamlandırma Bulanık Çıkarım İki-değerli mantık
Bulanık Mantık Denetleyicileri Bulanık Çıkarım BULANIK ÇIKARIM İki-değerli mantık Çok-değerli mantık Bulanık mantık Bulanık kurallar Bulanık çıkarım Bulanık anlamlandırma Bulanık Çıkarım İki-değerli mantık
MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI
 MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI Mekatronik Mühendisliği Yüksek Lisans programının eğitim dili İngilizce olup, tezli ve tezsiz iki programdan oluşmaktadır. Tezli programda öğrencilerin; -
MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI Mekatronik Mühendisliği Yüksek Lisans programının eğitim dili İngilizce olup, tezli ve tezsiz iki programdan oluşmaktadır. Tezli programda öğrencilerin; -
İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL oda no: 303 (T4 / EEM)
 Dr. Akif AKGÜL oda no: 303 (T4 / EEM)") İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
İşaret ve Sistemler İŞARET ve SİSTEMLER (SIGNALS and SYSTEMS) Dr. Akif AKGÜL aakgul@sakarya.edu.tr oda no: 303 (T4 / EEM) Kaynaklar: 1. Signals and Systems, Oppenheim. (Türkçe versiyonu: Akademi Yayıncılık)
2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics
 2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics Özet: Bulanık bir denetleyici tasarlanırken karşılaşılan en önemli sıkıntı, bulanık giriş çıkış üyelik fonksiyonlarının
2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics Özet: Bulanık bir denetleyici tasarlanırken karşılaşılan en önemli sıkıntı, bulanık giriş çıkış üyelik fonksiyonlarının
Tedarik Zinciri Yönetiminde Yapay Zeka Teknikler
 Tedarik Zinciri Yönetiminde Yapay Zeka Teknikler Doç.Dr.Mehmet Hakan Satman mhsatman@istanbul.edu.tr İstanbul Üniversitesi 2014.10.22 Doç.Dr.Mehmet Hakan Satmanmhsatman@istanbul.edu.tr Tedarik Zinciri
Tedarik Zinciri Yönetiminde Yapay Zeka Teknikler Doç.Dr.Mehmet Hakan Satman mhsatman@istanbul.edu.tr İstanbul Üniversitesi 2014.10.22 Doç.Dr.Mehmet Hakan Satmanmhsatman@istanbul.edu.tr Tedarik Zinciri
ROBOTLARIN YAPAY SİNİR AĞLARI KULLANILARAK DENETİMİ.
 ROBOTLARIN YAPAY SİNİR AĞLARI KULLANILARAK DENETİMİ Murat ŞEKER 1 Ahmet BERKAY 1 EMurat ESİN 1 ArşGör,Gebze Yüksek Teknoloji Enstitüsü, Bilgisayar MühBöl 41400 Gebze mseker@bilmuhgyteedutr aberkay@bilmuhgyteedutr,
ROBOTLARIN YAPAY SİNİR AĞLARI KULLANILARAK DENETİMİ Murat ŞEKER 1 Ahmet BERKAY 1 EMurat ESİN 1 ArşGör,Gebze Yüksek Teknoloji Enstitüsü, Bilgisayar MühBöl 41400 Gebze mseker@bilmuhgyteedutr aberkay@bilmuhgyteedutr,
ENTEK TEKNOLOJİ EĞİTİMLERİ
 ENTEK TEKNOLOJİ EĞİTİMLERİ HIDR HİDROLİK TEKNOLOJİSİ EĞİTİMİ o Hidrolik devre elemanlarını tanımak ve çalışma prensiplerini öğrenmek o Uluslararası standartlara göre hidrolik devre şeması çizebilmek ve
ENTEK TEKNOLOJİ EĞİTİMLERİ HIDR HİDROLİK TEKNOLOJİSİ EĞİTİMİ o Hidrolik devre elemanlarını tanımak ve çalışma prensiplerini öğrenmek o Uluslararası standartlara göre hidrolik devre şeması çizebilmek ve
ALGORİTMA VE PROGRAMLAMA I DERS NOTU#8
 ALGORİTMA VE PROGRAMLAMA I DERS NOTU#8 YZM 1105 Celal Bayar Üniversitesi Hasan Ferdi Turgutlu Teknoloji Fakültesi 6. BÖLÜM 2 Çok Boyutlu Diziler Çok Boyutlu Dizi 3 Bir dizi aşağıdaki gibi bildirildiğinde
ALGORİTMA VE PROGRAMLAMA I DERS NOTU#8 YZM 1105 Celal Bayar Üniversitesi Hasan Ferdi Turgutlu Teknoloji Fakültesi 6. BÖLÜM 2 Çok Boyutlu Diziler Çok Boyutlu Dizi 3 Bir dizi aşağıdaki gibi bildirildiğinde
Lineer Pivot Sulama ve Center Pivot Sulama Sistemlerinde Uzaktan RF Kontrol & İzleme & Pozisyon Kontrol Sistemleri
 Lineer Pivot Sulama ve Center Pivot Sulama Sistemlerinde Uzaktan RF Kontrol & İzleme & Pozisyon Kontrol Sistemleri 1 -Makineların sulama oranı 2-Nem oranı 3-PIVOT Çalış / Dur 4- Pivot Enerjisini Aç / Kapat
Lineer Pivot Sulama ve Center Pivot Sulama Sistemlerinde Uzaktan RF Kontrol & İzleme & Pozisyon Kontrol Sistemleri 1 -Makineların sulama oranı 2-Nem oranı 3-PIVOT Çalış / Dur 4- Pivot Enerjisini Aç / Kapat
MEKATRONİK SİSTEM TASARIMI
 MEKATRONİK SİSTEM TASARIMI Resim-1 Dr. Özgür AKIN Giriş Mekatronik Nedir? Mekatroniğin Tarihçesi. Bir Mekatronik Mühendisinin Özellikleri. Mekatroniğin İlgi Alanları. Mekatroniğin Uygulama Alanları Sistem
MEKATRONİK SİSTEM TASARIMI Resim-1 Dr. Özgür AKIN Giriş Mekatronik Nedir? Mekatroniğin Tarihçesi. Bir Mekatronik Mühendisinin Özellikleri. Mekatroniğin İlgi Alanları. Mekatroniğin Uygulama Alanları Sistem
BMT 206 Ayrık Matematik. Yük. Müh. Köksal GÜNDOĞDU 1
 BMT 206 Ayrık Matematik Yük. Müh. Köksal GÜNDOĞDU 1 Fonksiyonlar Yük. Müh. Köksal GÜNDOĞDU 2 Fonksiyonlar Tanım: A ve B boş olmayan kümeler. A dan B ye bir f fonksiyonu f: A B ile gösterilir ve A nın her
BMT 206 Ayrık Matematik Yük. Müh. Köksal GÜNDOĞDU 1 Fonksiyonlar Yük. Müh. Köksal GÜNDOĞDU 2 Fonksiyonlar Tanım: A ve B boş olmayan kümeler. A dan B ye bir f fonksiyonu f: A B ile gösterilir ve A nın her
DERS TANIMLAMA FORMU. Eğitim ve Öğretim Yöntemleri (ECTS) Proje/Alan Çalışması. Yrd.Doç.Dr Yahya TAŞGIN
 Proje/Alan Çalışması. Yrd.Doç.Dr Yahya TAŞGIN") DERS TANIMLAMA FORMU Dersin Kodu ve Adı : MMU 475 Makine Laboratuvarı Programın Adı: Makine Mühendisliği Bölümü Yarıyıl Eğitim ve Öğretim Yöntemleri (ECTS) Teori Uyg. Lab. Proje/Alan Çalışması Krediler
DERS TANIMLAMA FORMU Dersin Kodu ve Adı : MMU 475 Makine Laboratuvarı Programın Adı: Makine Mühendisliği Bölümü Yarıyıl Eğitim ve Öğretim Yöntemleri (ECTS) Teori Uyg. Lab. Proje/Alan Çalışması Krediler
Bilişim Teknolojileri Temelleri 2011. Dijital Dünyada Yaşamak
 Bilişim Teknolojileri Temelleri 2011 Dijital Dünyada Yaşamak Bilgisayar nedir? Bilgisayar, kullanıcı tarafından girilen bilgileri(veri) işleyen, depolayan istendiğinde girilen bilgileri ve sonuçlarını
Bilişim Teknolojileri Temelleri 2011 Dijital Dünyada Yaşamak Bilgisayar nedir? Bilgisayar, kullanıcı tarafından girilen bilgileri(veri) işleyen, depolayan istendiğinde girilen bilgileri ve sonuçlarını
Dijital Dönüşüm ile. Değişen Üretim Süreçleri ve Yeni İş Modelleri. Doç. Dr. Alp ÜSTÜNDAĞ 12.04.16
 Dijital Dönüşüm ile Değişen Üretim Süreçleri ve Yeni İş Modelleri Doç. Dr. Alp ÜSTÜNDAĞ 12.04.16 https://www.youtube.com/watch?v=f6gb9uwbzl Endüstri de 4. Devrim ile yeni bir dönem başlıyor 1.0 2.0 3.0
Dijital Dönüşüm ile Değişen Üretim Süreçleri ve Yeni İş Modelleri Doç. Dr. Alp ÜSTÜNDAĞ 12.04.16 https://www.youtube.com/watch?v=f6gb9uwbzl Endüstri de 4. Devrim ile yeni bir dönem başlıyor 1.0 2.0 3.0
BULANIK MANTIK DENETLEYİCİLERİ. Bölüm-4 Bulanık Çıkarım
 BULANIK MANTIK DENETLEYİCİLERİ Bölüm-4 Bulanık Çıkarım 1 Bulanık Çıkarım Bölüm 4 : Hedefleri Bulanık kuralların ve bulanık bilgi tabanlarının nasıl oluşturulacağını anlamak. Gerçekte bulanık muhakeme olan
BULANIK MANTIK DENETLEYİCİLERİ Bölüm-4 Bulanık Çıkarım 1 Bulanık Çıkarım Bölüm 4 : Hedefleri Bulanık kuralların ve bulanık bilgi tabanlarının nasıl oluşturulacağını anlamak. Gerçekte bulanık muhakeme olan
BİR SOĞUTMA GRUBUNDA KOMPRESÖR HIZININ BULANIK MANTIK ALGORİTMA İLE KONTROLÜ
 BİR SOĞUTMA GRUBUNDA KOMPRESÖR HIZININ BULANIK MANTIK ALGORİTMA İLE KONTROLÜ Öğr. Gör. Orhan EKREN Ege Üniversitesi Doç. Dr. Serhan KÜÇÜKA Dokuz Eylül Üniversitesi SUNUM İÇERİĞİ ÇALIŞMANIN AMACI DENEY
BİR SOĞUTMA GRUBUNDA KOMPRESÖR HIZININ BULANIK MANTIK ALGORİTMA İLE KONTROLÜ Öğr. Gör. Orhan EKREN Ege Üniversitesi Doç. Dr. Serhan KÜÇÜKA Dokuz Eylül Üniversitesi SUNUM İÇERİĞİ ÇALIŞMANIN AMACI DENEY
Yapay Sinir Ağları GİRİŞ
 Yapay Sinir Ağları GİRİŞ Akıl kelimesi genellikle zeka kavramıyla karıştırılmaktadır.oysa akıl düşünme, kavrama,idrak etme ve karar verme yeteneklerini kapsar.akıl genetik olarak ve çevresel faktörler
Yapay Sinir Ağları GİRİŞ Akıl kelimesi genellikle zeka kavramıyla karıştırılmaktadır.oysa akıl düşünme, kavrama,idrak etme ve karar verme yeteneklerini kapsar.akıl genetik olarak ve çevresel faktörler
Robot Bilimi. Robot Kontrol Sistemleri
 Robot Bilimi Robot Kontrol Sistemleri Öğr. Gör. M. Ozan AKI r1.0 Robot Kontrol Yapısı Robotlar (Aynı zamanda insanlarda); Çevrelerini Algılarlar Karar verirler (Amaçları, Görevleri v.s.) Çevrelerine Tepki
Robot Bilimi Robot Kontrol Sistemleri Öğr. Gör. M. Ozan AKI r1.0 Robot Kontrol Yapısı Robotlar (Aynı zamanda insanlarda); Çevrelerini Algılarlar Karar verirler (Amaçları, Görevleri v.s.) Çevrelerine Tepki
TİCARİ ARAÇ GELİŞTİRME PROJESİ KAPSAMINDA DİNAMİK MODELİN TESTLER İLE DOĞRULANMASI
 TİCARİ ARAÇ GELİŞTİRME PROJESİ KAPSAMINDA DİNAMİK MODELİN TESTLER İLE DOĞRULANMASI Baki Orçun ORGÜL, Mustafa Latif KOYUNCU, Sertaç DİLEROĞLU, Harun GÖKÇE Hexagon Studio Araç Mühendisliği Bölümü OTEKON
TİCARİ ARAÇ GELİŞTİRME PROJESİ KAPSAMINDA DİNAMİK MODELİN TESTLER İLE DOĞRULANMASI Baki Orçun ORGÜL, Mustafa Latif KOYUNCU, Sertaç DİLEROĞLU, Harun GÖKÇE Hexagon Studio Araç Mühendisliği Bölümü OTEKON
LABİRENTTEN ÇIKIŞ YOLUNU BULAN ROBOT
 ELEKTRİK MÜHENDİSLERİ ODASI İSTANBUL ŞUBESİ 2006-2007 ÖĞRETİM YILI PROJE YARIŞMASI LABİRENTTEN ÇIKIŞ YOLUNU BULAN ROBOT HAZIRLAYANLAR Hamdi Ertan YAŞAR Duygu ÇULUM Süleyman ÇİÇEK PROJE YÖNETİCİSİ Yrd.
ELEKTRİK MÜHENDİSLERİ ODASI İSTANBUL ŞUBESİ 2006-2007 ÖĞRETİM YILI PROJE YARIŞMASI LABİRENTTEN ÇIKIŞ YOLUNU BULAN ROBOT HAZIRLAYANLAR Hamdi Ertan YAŞAR Duygu ÇULUM Süleyman ÇİÇEK PROJE YÖNETİCİSİ Yrd.
2. Klasik Kümeler-Bulanık Kümeler
 2. Klasik Kümeler-Bulanık Kümeler Klasik Küme Teorisi Klasik kümelerde bir nesnenin bir kümeye üye olması ve üye olmaması söz konusudur. Bu yaklaşıma göre istediğimiz özelliğe sahip olan bir birey, eleman
2. Klasik Kümeler-Bulanık Kümeler Klasik Küme Teorisi Klasik kümelerde bir nesnenin bir kümeye üye olması ve üye olmaması söz konusudur. Bu yaklaşıma göre istediğimiz özelliğe sahip olan bir birey, eleman
BÜTÜNLEŞİK İMALAT SİSTEMLERİ
 BÜTÜNLEŞİK İMALAT SİSTEMLERİ Doç.Dr. Semih ÖNÜT İçerik Bütünleşik imalat sistemlerine giriş Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi
BÜTÜNLEŞİK İMALAT SİSTEMLERİ Doç.Dr. Semih ÖNÜT İçerik Bütünleşik imalat sistemlerine giriş Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi Yapısal açıdan bütünleşik imalat sistemlerinin incelenmesi
Ders Adı : Sensörler ve Transdüserler Ders No : Teorik : 2 Pratik : 0 Kredi : 2 ECTS : 2. Ders Bilgileri. Ön Koşul Dersleri.
 Image not found http://bologna.konya.edu.tr/panel/images/pdflogo.png Ders Adı : Sensörler ve Transdüserler Ders No : 0690260015 Teorik : 2 Pratik : 0 Kredi : 2 ECTS : 2 Ders Bilgileri Ders Türü Öğretim
Image not found http://bologna.konya.edu.tr/panel/images/pdflogo.png Ders Adı : Sensörler ve Transdüserler Ders No : 0690260015 Teorik : 2 Pratik : 0 Kredi : 2 ECTS : 2 Ders Bilgileri Ders Türü Öğretim
ÇİMENTO BASMA DAYANIMI TAHMİNİ İÇİN YAPAY SİNİR AĞI MODELİ
 ÇİMENTO BASMA DAYANIMI TAHMİNİ İÇİN YAPAY SİNİR AĞI MODELİ Ezgi Özkara a, Hatice Yanıkoğlu a, Mehmet Yüceer a, * a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği Bölümü, Malatya, 44280 myuceer@inonu.edu.tr
ÇİMENTO BASMA DAYANIMI TAHMİNİ İÇİN YAPAY SİNİR AĞI MODELİ Ezgi Özkara a, Hatice Yanıkoğlu a, Mehmet Yüceer a, * a* İnönü Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği Bölümü, Malatya, 44280 myuceer@inonu.edu.tr
Bulanık Küme Kavramı BULANIK KÜME. Sonlu ve Sonsuz Bulanık Kümeler. Sonlu ve Sonsuz Bulanık Kümeler
 ULNIK KÜME ulanık Küme Kavramı Elemanları x olan bir X evrensel (universal küme düșünelim. u elemanların ÌX alt kümesine aitliği, yani bu altkümelerin elemanı olup olmadığı X in {0,1} de olan karakteristik
ULNIK KÜME ulanık Küme Kavramı Elemanları x olan bir X evrensel (universal küme düșünelim. u elemanların ÌX alt kümesine aitliği, yani bu altkümelerin elemanı olup olmadığı X in {0,1} de olan karakteristik
Algoritma Analizi ve Büyük O Notasyonu. Şadi Evren ŞEKER YouTube: Bilgisayar Kavramları
 Algoritma Analizi ve Büyük O Notasyonu Şadi Evren ŞEKER YouTube: Bilgisayar Kavramları Algoritmaların Özellikleri Algoritmalar Input Girdi, bir kümedir, Output ÇıkF, bir kümedir (çözümdür) Definiteness
Algoritma Analizi ve Büyük O Notasyonu Şadi Evren ŞEKER YouTube: Bilgisayar Kavramları Algoritmaların Özellikleri Algoritmalar Input Girdi, bir kümedir, Output ÇıkF, bir kümedir (çözümdür) Definiteness
ERCİYES ÜNİV. MÜHENDİSLİK FAK. MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ YANDAL EĞİTİM PLANLARI MAKİNA MÜHENDİSLİĞİ İÇİN YANDAL EĞİTİM PLANI
 ERCİYES ÜNİV. MÜHENDİSLİK FAK. MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ 17-18 YANDAL EĞİTİM PLANLARI MAKİNA MÜHENDİSLİĞİ İÇİN YANDAL EĞİTİM PLANI. YARIYIL MEM 9 ELEKTRONİK DEVRELER-I TOPLAM. YARIYIL MEM MEM 8 MEM
ERCİYES ÜNİV. MÜHENDİSLİK FAK. MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ 17-18 YANDAL EĞİTİM PLANLARI MAKİNA MÜHENDİSLİĞİ İÇİN YANDAL EĞİTİM PLANI. YARIYIL MEM 9 ELEKTRONİK DEVRELER-I TOPLAM. YARIYIL MEM MEM 8 MEM
Bulanık Mantık ve DURTES Yönteminde Uygulanması İçin Bir Öneri
 Bulanık Mantık ve DURTES Yönteminde Uygulanması İçin Bir Öneri Rasim TEMUR İstanbul Üniversitesi İnşaat Mühendisliği Bölümü Sunum Programı 1. Giriş 2. Bulanık mantık 3. DURTES yöntemi 4. Uygulama önerileri
Bulanık Mantık ve DURTES Yönteminde Uygulanması İçin Bir Öneri Rasim TEMUR İstanbul Üniversitesi İnşaat Mühendisliği Bölümü Sunum Programı 1. Giriş 2. Bulanık mantık 3. DURTES yöntemi 4. Uygulama önerileri
Bölüm 8. Ayrık Küme. Olcay Taner Yıldız. O. T. Yıldız, C && Java ile Veri Yapılarına Giriş, Boğaziçi Üniversitesi Yayınevi, / 16
 Bölüm 8. Ayrık Küme Olcay Taner Yıldız 2014 O. T. Yıldız, C && Java ile Veri Yapılarına Giriş, Boğaziçi Üniversitesi Yayınevi, 2013 1 / 16 O. T. Yıldız, C && Java ile Veri Yapılarına Giriş, Boğaziçi Üniversitesi
Bölüm 8. Ayrık Küme Olcay Taner Yıldız 2014 O. T. Yıldız, C && Java ile Veri Yapılarına Giriş, Boğaziçi Üniversitesi Yayınevi, 2013 1 / 16 O. T. Yıldız, C && Java ile Veri Yapılarına Giriş, Boğaziçi Üniversitesi
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
Fonksiyon Optimizasyonunda Genetik Algoritmalar
 01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
01-12-06 Ümit Akıncı Fonksiyon Optimizasyonunda Genetik Algoritmalar 1 Fonksiyon Optimizasyonu Fonksiyon optimizasyonu fizikte karşımıza sık çıkan bir problemdir. Örneğin incelenen sistemin kararlı durumu
KONTROL VE OTOMASYON MÜH. BÖLÜMÜ
 KONTROL VE OTOMASYON MÜH. BÖLÜMÜ http://www.kontrol.itu.edu.tr İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ KONTROL ve OTOMASYON MÜHENDİSLİĞİ NEDİR Kontrol ve Otomasyon Mühendisliği; elektrik,
KONTROL VE OTOMASYON MÜH. BÖLÜMÜ http://www.kontrol.itu.edu.tr İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ KONTROL ve OTOMASYON MÜHENDİSLİĞİ NEDİR Kontrol ve Otomasyon Mühendisliği; elektrik,
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 1- GİRİŞ Doç. Dr. Ali Rıza YILDIZ 1 Mühendislikte, herhangi bir fiziksel sistemin matematiksel modellenmesi sonucu elde edilen karmaşık veya analitik çözülemeyen denklemlerin
MAK 210 SAYISAL ANALİZ BÖLÜM 1- GİRİŞ Doç. Dr. Ali Rıza YILDIZ 1 Mühendislikte, herhangi bir fiziksel sistemin matematiksel modellenmesi sonucu elde edilen karmaşık veya analitik çözülemeyen denklemlerin
Stack Islemleri. Postfix ve Infix notasyonlari. Stack ozellikleri
 Veri Yapilari Stacks Stacks Queues Lists Stack nedir Stack de tanimli islemler Push Pop Empty Full Inialization Stack in gerceklestirilmesi 10/7/2004 Veri yapilari 3.1 10/7/2004 Veri yapilari 3.2 Stack
Veri Yapilari Stacks Stacks Queues Lists Stack nedir Stack de tanimli islemler Push Pop Empty Full Inialization Stack in gerceklestirilmesi 10/7/2004 Veri yapilari 3.1 10/7/2004 Veri yapilari 3.2 Stack
Varol, A., Şengür, A., Avcı, E.: Atık Toplayan Araç Otomasyonu, Otomasyon, Sayı 154, 2005(03), Mart 2005.
, Mart 2005.") 2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi
2.59. ATIK TOPLAYAN ARAÇ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Özet Bu benzetim projesinde, insana zarar verecek radyoaktif, biyolojik ve kimyasal atıkların yüklenmesi, nakli ve indirilmesi