MAK 1022 Makine Mühendisliğinde Sonlu Elemanlar Yöntemi
|
|
|
- Erdem Gültekin
- 5 yıl önce
- İzleme sayısı:
Transkript
1 MAK 1022 Makine Mühendisliğinde Sonlu Elemanlar Yöntemi
2 Tabiatta karşılaşılan her olay fizik kanunları yardımıyla ve matematik diliyle anlaşılmaya çalışılır. Her olay kendine ait büyüklükler yardımıyla cebirsel, diferansiyel veya integral denklemler yardımıyla büyük oranda ifade edilebilir. Karmaşık bir problem, bilinen veya kavranması daha kolay alt problemlere ayrılarak daha anlaşılır bir hale getirilebilir. Oluşturulan alt problemler çözülüp birleştirilerek esas problemin çözümü yapılabilir.
3 Örneğin; gerilme problemi, basit kiriş, plak, silindir, küre gibi geometrisi bilinen şekillerle sınırlandırılabilir. Bu elde edilen sonuçlar çoğu kez problemin yaklaşık çözümüdür ve bazen doğrudan bazen de bir katsayı ile düzeltilerek kullanılır. Mühendislik uygulamalarında problemlerin karmaşıklığı sebebiyle genellikle problemlerin tam çözümü yerine, kabul edilebilir seviyede bir yaklaşık çözüm tercih edilir.
4 Serbestlik Derecesi (Degrees of Freedom-Dof): Bir sistemin bütün parçalarının herhangi bir zamanda konumlarının tamamen belirli olması için gerekli birbirinden bağımsız minimum koordinat sayısına serbestlik derecesi denir. Uzayda bir noktaya maksimum 6 serbestlik derecesi tanımlanabilir. Sonlu eleman maksimum 6 serbestlik derecesi kullanır. Bir çok elemanı tanımlamak için 6 serbestlik derecesinden daha az serbestlik derecesi kullanılması yeterli olmaktadır.
5
6 Ayrık ve Sürekli Sistemler Sonlu sayıda serbestlik dereceli sistemlere ayrık sistem denir. Ayrık sistemin belirli değişkenlere göre durumu adi diferansiyel denklemler kullanılarak incelenebilir. Serbestlik derecesi sonsuz olan sistemlere sürekli sistem denir. Sürekli sistemin belirli değişkenlere göre durumu kısmi türevli diferansiyel denklemler kullanılarak incelenebilir. Sürekli sistem
7 P EI 48EI k 3 L L Şekil 1 Tek taraftan ankastre mesnetli elastik kiriş m Şekil 2 Ayrık sistem Şekil 1. deki tek taraftan ankastre mesnetlenmiş elastik kirişin serbestlik derecesi sonsuzdur. Serbestlik derecesi sonsuz olan sistemlerin hareketinin diferansiyel denklemi kısmi türevli diferansiyel denklemdir. Sonlu sistemler ise ayrık olarak adlandırılır ve hareketleri adi diferansiyel denklemle gösterilebilir. m x k x F(t)
8 Klasik rijit gövde analizi çoğu dinamik problemler için yetersiz kalmaktadır. Elastik gövde yaklaşımı ise çok sayıda kısmi türevli diferansiyel denklemin çözümünü gerektirmektedir. Kompleks yapıları, özellikle homojen olmayan yapıya sahip olanları, sonlu elemanlar metoduyla (SEM) çözmek çok kolay olmaktadır. Metot 1950 yılında uçak ve uzay sanayinde gerilme analizi için kullanılmaya başlanmıştır. Yöntemin esasları üzerine yapılan çalışmalar sonucu kullanım sahası genişlemiş olup ilerleyen bilgisayar teknolojisiyle biyomekanikten nükleer teknolojiye farklı sahalarda yaygın olarak kullanılmaktadır. Günümüzde yapısal analiz için yapılan araştırmalarda sonlu elemanlar metodu çoğunlukla tercih edilmektedir
9 (Sürekli Çözüm) (Ayrıklaştırılmış Çözüm)
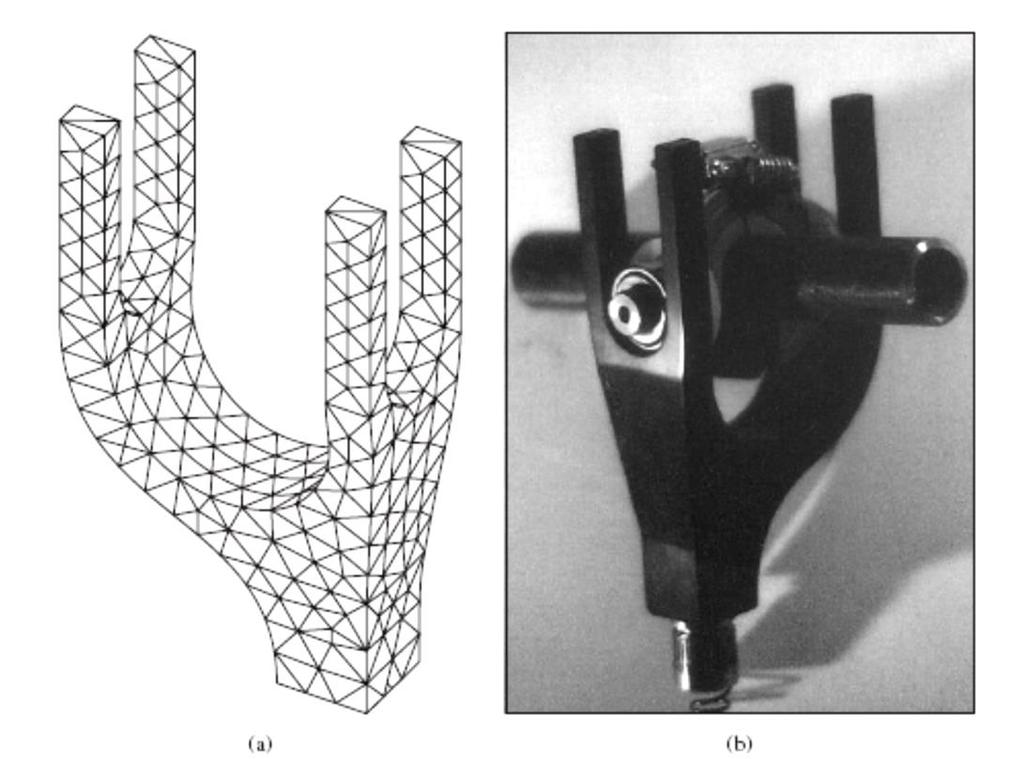
10 Fiziksel bir olayın çözüm aşamaları Fiziksel olayların Matematik formülasyonu Matematik modelin nümerik analizi Sonlu Elemanlar (SE)Yöntemi, çeşitli mühendislik problemlerine kabul edilebilir bir yaklaşımla çözüm arayan bir sayısal çözüm yöntemidir. Sonlu Elemanlar Analizi (SEA) Sonlu Elemanlar Analizi, fiziksel bir sistemin matematik olarak ifade edilmesidir. Bu sistem alt parçalara ayrılabilen model olup, malzeme özelliklerine ve uygulanabilir sınır şartlarına sahiptir
11 Sonlu elemanlar metodu; karmaşık olan problemlerin daha basit alt problemlere ayrılarak her birinin kendi içinde çözülmesiyle tam çözümün bulunduğu bir çözüm şeklidir. Metodun üç temel niteliği vardır: 1) Geometrik olarak karmaşık olan çözüm bölgesi sonlu elemanlar olarak adlandırılan geometrik olarak basit alt bölgelere ayrılır. 2) Her elemandaki, sürekli fonksiyonların, cebirsel polinomların lineer kombinasyonu olarak tanımlanabileceği kabul edilir.
12 3) Aranan değerlerin her eleman içinde sürekli olan tanım denklemlerinin belirli noktalardaki (düğüm noktaları) değerleri elde edilmesinin problemin çözümünde yeterli olmasıdır. Kullanılan yaklaşım fonksiyonları interpolasyon teorisinin genel kavramları kullanılarak polinomlardan seçilir. Seçilen polinomların derecesi ise çözülecek problemin tanım denkleminin derecesine ve çözüm yapılacak elemandaki düğüm sayısına bağlıdır.
13 Sürekli bir ortamda alan değişkenleri (gerilme, yer değiştirme, basınç, sıcaklık vs.) sonsuz sayıda farklı değere sahiptir. Eğer sürekli bir ortamın belirli bir bölgesinin de aynı şekilde sürekli ortam özelliği gösterdiği biliniyorsa, bu alt bölgede alan değişkenlerinin değişimi sonlu sayıda bilinmeyeni olan bir fonksiyon ile tanımlanabilir. Bilinmeyen sayısının az ya da çok olmasına göre seçilen fonksiyon lineer ya da yüksek mertebeden olabilir.
14 Sürekli ortamın alt bölgeleri de aynı karakteristik özellikleri gösteren bölgeler olduğundan, bu bölgelere ait alan denklem takımları birleştirildiğinde bütün sistemi ifade eden denklem takımı elde edilir. Denklem takımının çözümü ile sürekli ortamdaki alan değişkenleri sayısal olarak elde edilir.
15 Physical System F.E. Model
16

17 Avantajları Modeller tasarım geliştirmede kullanılır. Prototip gerekmez. Dezavantajları Modelleme kabulleri. Modelin bağlantı tasarımlarının zorluğu. Komponent etkileşimlerinin tahmin zorluğu. Sönüm genelde ihmal edilir.
18 Kullanıldığı Yerler Yapısal Analiz, Termal Analiz, akışkanlar mekaniği CFD (Computational Fluid Dynamics), zemin mekaniği, uçak mühendisliği nükleer mühendislik, kaya mekaniği, Elektrik, elektromanyetik alanlar(electrical / Electrostatics, Electromagnetics ve daha sayabileceğimiz pek çok mühendislik ve fizik problemlerinin çözümünde araç olarak kullanılmaktadır. FEM kullanılan sektörlerden bazılarının listesi aşağıdadır. Havacılık Otomotiv Biyomedikal Köprüler ve Yapılar
19
20
21 Bazı FEM Ticari Yazılım Paket Programları (Structural Dynamics Research Corporation Integrated Design and Engineering Analysis Software)
22 Şekil Fonksiyonları Eleman üzerindeki alan değişkeninin değişimi için polinom gibi basit fonksiyonlar kullanılarak yaklaşım yapılır. Yaklaşımın hassasiyeti ise yapıyı temsil eden eleman sayısını veya kullanılan fonksiyon derecesini büyültülerek arttırılır.
23 Kompleks bir fonksiyon parçalı lineer fonksiyonlarla gösterilmektedir. F ( x ) (Alan değişkeninin bilinmeyen fonksiyonu) Unknown function of field variable (Düğümlerdeki alan değişkeninin bilinmeyen ayrık değerleri) Unknown discrete values of field variable at nodes elements (Elemanlar) nodes (Düğümler) x
24
25 4-Noded Shell 10-Noded Tetrahedral 20-Noded Hexahedral (4 düğümlü kabuk) (10 düğümlü dörtyüzlü) (20 düğümlü altıyüzlü)
26 SEA(FEA), yaklaşık bir metottur. İyi bir planlama, Dikkatli bir modelleme, Sınır şartları ve yük durumları için doğru yaklaşım, Sonuçların doğru olarak yorumlanmasını, gerektirir.
27 Sonlu Eleman Yönteminin diğer nümerik yöntemlere göre avantajları a) Kullanılan sonlu elemanların boyutlarının ve şekillerinin değişkenliği nedeniyle ele alınan bir cismin geometrisi tam olarak temsil edilebilir. b) Bir veya birden çok delik veya köşeleri olan bölgeler kolaylıkla incelenebilir. c) Değişik malzeme ve geometrik özellikleri bulunan cisimler incelenebilir.
28 d) Sebep sonuç ilişkisine ait problemler, genel direngenlik matrisi ile birbirine bağlanan genelleştirilmiş kuvvetler ve yer değiştirmeler cinsinden formüle edilebilir. Sonlu elemanlar metodunun bu özelliği problemlerin anlaşılmasını ve çözülmesini hem mümkün kılar hem de basitleştirir. e) Sınır şartları kolayca uygulanabilir.
29 Başlamadan önce; Dizaynın amaçlarının neler olduğunu belirlemek gerekmektedir. 1. Neleri bilmeye ihtiyacın var. 2. SEA neden yapıyorsun? Dizayn kriteri nedir? Yapılan dizaynı değerlendirmek için hangi mühendislik kriteri kullanılacaktır.
30 Planlama Ne bulmaya çalışıyoruz? Yapıyı modellerken neler dikkate alınacak ve neler ihmal edilebilir? Sınır koşulları ve yükler nelerdir? Gerilmeler, deplasmanlar (yer değiştirmeler), frekans, burkulma veya sıcaklık gibi değişkenlerden hangilerini bilmeniz gerekmektedir? Sonlu elemanlar analizi sonuçlarını doğrulamak amacıyla yapılan elle basit hesaplamalar, deney sonuçları, yapının nasıl davranacağı ve hangi rakamların anlamlı olacağına dair fikir verecektir.
31 Doğru Sonuçlar Elde Etmek : Problemin fiziğini anlamaya, Elemanların nasıl hareket edeceğini anlamaya, Doğru eleman, eleman sayısı ve dağılımı seçmeye, Sonuçları değerlendirme ve doğru sonuçların elde edilmesi için modelde gerekli düzeltmelerin yapılmasına, Yapılan varsayımların ve basitleştirmelerin etkilerinin anlaşılmasına bağlıdır.
32 SEA Prosesleri 1. Analiz tipini seçmek 2. Malzeme özelliklerini seçmek 3. Model geometrisini oluşturmak Create model geometry (Ağ yapısı dahil) 4. Sınır şartlarını uygulamak 5. Yükleri uygulamak 6. Çözümü optimize etmek
33 SEA programları fiziksel modelin CAD sunumunu kullanmaktadır. Program bu parçayı alt parçalara ayırır bunlar sonlu eleman olarak adlandırılır. Alt parçalara ayırma işlemine mesh ağlara bölme denmektedir. Daha iyi ağ (daha çok eleman) fiziksel modelin matematik olarak daha iyi ifade edilmesi demektir. Bir elemanın birincil amacı iki nodu yayla birbirine bağlamaktır. Eleman tipi problemin tipine göre değişmektedir.
34 Analiz Tipi Statik veya dinamik mi? Yükler yavaş bir şekilde veya aniden mi uygulanıyor? Titreşimler? Deprem? Lineer veya nonlineer? Deplasmanlar büyük mü? Nonlineer malzeme? Contact(Temas)?
35 Statik analiz atalet ve sönüm etkilerini ihmal eder. Dinamik ve statik analiz seçiminde yükleri zamana bağlı olarak kullanabilirsiniz. Eğer nispi uygulama zamanı uzun ve yük sabit ise statik analiz seçilebilir. Genel olarak, kuvvetin uyarma frekansı yapının en düşük doğal frekansının 1/3 ünden az ise statik analiz kabul edilebilir.
36 Lineer veya Nonlineer Nonlineer yapısal davranışlar, yapı rijitliğini değiştirmektedir. Çeşitli non-lineer durum tipleri : Geometrik Malzeme (e.g., plasticity, hyperelasticity) Değişen durumlar (e.g., contact)
37 Sonlu elemanlar metodunun temel prensibi, öncelikle bir elemana ait sistem özelliklerini içeren denklemlerin çıkartılıp tüm sistemi temsil edecek şekilde eleman denklemlerini birleştirerek sisteme ait lineer denklem takımının elde edilmesidir. Bir elemana ait denklemlerin elde edilmesinde değişik metotlar kullanılabilir. Bunlar içinde en çok kullanılan dört temel yöntem şunlardır: lagrange
38 1)Direkt yaklaşım: Bu yaklaşım daha çok tek boyutlu ve basit problemler için uygundur. 2)Varyasyonel yaklaşım: Bir fonksiyonelin (bağımsız değişkeni fonksiyon olan bir fonksiyonun) ekstremize yani maksimum ve minimum edilmesi demektir. Katı cisim mekaniğinde en çok kullanılan fonksiyoneller potansiyel enerji prensibi, komplementer (tümleyen) potansiyel enerji prensibi ve Reissner prensibi olarak sayılabilir. Fonksiyonelin birinci türevinin sıfır olduğu noktada fonksiyonu ekstremize eden değerler bulunur. İkinci türevinin sıfırdan büyük veya küçük olmasına göre bu değerin maksimum veya minimum olduğu anlaşılır.
39 3)Ağırlıklı kalanlar yaklaşımı: Bir fonksiyonun çeşitli değerler karşılığında elde edilen yaklaşık çözümü ile gerçek çözüm arasındaki farkların bir ağırlık fonksiyonu ile çarpılarak toplamlarını minimize etme işlemine "ağırlıklı kalanlar yaklaşımı" denir. Bu yaklaşım kullanılarak eleman özelliklerinin elde edilmesinin avantajı, fonksiyonellerin elde edilemediği problemlerde uygulanabilir olmasıdır. 4)Enerji dengesi yaklaşımı: Bir sisteme giren ve çıkan termal veya mekanik enerjilerin eşitliği ilkesine dayanır. Bu yaklaşım bir fonksiyonele ihtiyaç göstermez.
40 Ağırlıklı Kalanlar ( Artıklar ) Yöntemi Ağırlıklı Artıklar Yöntemi L(y(x)) = f(x) x şeklinde alınan eşitlikte L, diferansiyel operatör, x ise Ω bölgesinin üzerinde alınan bir nokta olmak üzere, bölge üzerindeki hata fonksiyonu aşağıdaki gibi yazılır: ε (x) = L(y(x)) - f(x) (1) Yaklaşık çözüm için seçilen fonksiyonlar; y (x) = N a φ (x) (2) N i i i=1 olarak alınabilir. a i, x den bağımsız sabit terimler, φ i(x) ise tam bir fonksiyon (polinomlar, trigonometrik fonksiyonlar gibi) ailesinin elamanı olan baz fonksiyonlarıdır.
41 Ağırlıklı artık fonksiyonu ise aşağıdaki gibidir: [L(y(x)) - f(x)] (x)d 0 (3) Bölge noktaları için (x), ağırlık fonksiyonlarıdır. (3) denkleminde, (2) eşitliğinde verilen yaklaşık deneme fonksiyonu yerine yazıldığında, hatayı bölge üzerinde yaymamızı sağlayan ağırlıklı artık fonksiyonu; N [L( aiφ i(x)) - f(x)] (x)d 0 (4) i=1 olarak bulunur.
42 Bir uygulama üzerinde Ağırlıklı Kalan Yöntemlerini aşağıdaki gibi inceleyebiliriz. Uygulama y (x) + y(x) = x (5) diferansiyel denklemini, x=0 da y(0)=0, x=0 da y (0)=0 sınır şartlarını sağlayacak şekilde, ağırlıklı kalan yöntemleri ile çözünüz.
43 x = 0 da y(0) = 0 ve x = 0 da y (0) = 0 sınır şartlarını sağlayan, yaklaşık deneme fonksiyonunu; 2 4 y(x) = ax + bx (6) şeklinde seçebiliriz. hata fonksiyonu aşağıdaki gibi ifade edilir: ε (x) = 2ax + 4bx + ax + bx x (7) Ağırlıklı artık fonksiyonu, L (2ax + 4bx + ax + bx x) (x)dx = 0 (8) 0 şeklinde yazılır.
44 Denklemin tanımlı olduğu bölge, x [0,L] alınarak, ağırlıklı artık yöntemleri, aşağıda incelenmiştir. Nokta kollokasyon yöntemi Bu yöntemde, hatayı bölge üzerinde seçilen noktalar için sıfıra eşitlemek suretiyle, denklem (5) te verilen a ve b sabitleri hesaplanmaya çalışılır. Bu yöntemlerde denklem sayısı, bilinmeyen sabit sayısı kadar olması gerektiğinden bölge üzerinde seçilen noktaların sayısı, bilinmeyen sabit terimler kadar olmalıdır.
45 x = L / 2 ve x = L olarak seçilen bölge üzerindeki iki nokta için, (7) denklemindeki hata fonksiyonu aşağıdaki gibi yazılır: L bl al bl L ε (x = ) = al = 0 (9) ε (x = L) = 2aL+ 4bL + al + bl - L= 0 (10) (9) ve (10) denklemleri çözüldüğünde (6) denklemindeki a ve b sabitleri bulunarak yaklaşık deneme fonksiyonu elde edilir.
46
47 Momentler yöntemi Bu yöntemde, (8) denkleminde gösterilen ağırlıklı artık fonksiyonunda, bilinmeyen sayısına bağlı olarak, hatanın orijine göre momentleri, yani hata fonksiyonun ağırlık fonksiyonları (1, x, x 2,x 3...) ile çarpılmış hali, sıfıra eşitlenerek elde edilen denklemler aşağıdaki gibi yazılabilir: Hatanın sıfırıncı momenti; L (2ax + 4bx + ax + bx x)1dx = 0 (11) 0 Hatanın birinci momenti; L (2ax + 4bx + ax + bx x)xdx = 0 (12) 0 (11) ve (12) denklemlerindeki integrasyon işlemleri yapıldıktan sonra elde edilen denklemlerden a ve b sabit terimleri çekilerek (6) denkleminde verilen yaklaşık deneme fonksiyonu bulunur.
48
49 Alt bölge kollokasyon yöntemi Bu yöntemde hata fonksiyonu, bilinmeyen sayısına bağlı olarak, bölge üzerinde alt bölgeler için sıfırlanmaya çalışılır. Bu bölgelerdeki ağırlık fonksiyonun şiddeti de bir olarak alınır. Bu açıklamalar ışığında (8) denklemindeki ağırlıklı artık fonksiyonu; L (2ax + 4bx + ax + bx x)1dx = 0 (13) 0 L (2ax + 4bx + ax + bx x)1dx = 0 (14) L 2 şeklinde yazılabilir. (13) ve (14) denklemlerindeki integrasyonlar yapılıp, çıkan ifadelerden a ve b sabit terimleri elde edildikten sonra (6) denklemindeki yaklaşık deneme fonksiyonu bulunur.
50
51 Galerkin yöntemi Galerkin yönteminde, ağırlık fonksiyonları olarak baz fonksiyonları seçilir. (6) denklemindeki yaklaşık deneme fonksiyonunda bulunan x 2 ve x 4 baz fonksiyonları, (8) denkleminde kullanılarak, hata bölge üzerinde integre edildiğinde aşağıdaki eşitlikler elde edilir: L (2ax + 4bx + ax + bx x)x dx = 0 (15) 0 L (2ax + 4bx + ax + bx x)x dx = 0 (16) 0 (15) ve (16) denklemlerindeki integrasyon sonucunda çıkan ifadelerden, çekilebilecek olan a ve b sabitleri, (6) denklemindeki yaklaşık deneme fonksiyonunun bulunmasını sağlar.
52
53 En küçük kareler yöntemi Bu yöntemde; 2 [ε (x)] dx ifadesi minimum yapılmaya çalışılır. a i (i = 1,2,3...) değerleri x den bağımsız sabitler olmak üzere aşağıdaki ifadeler yazılabilir: a (17) 2 [ε (x)] d(x) = 0 i 2 [ε (x)] [ε (x)]d(x) = 0 (18) a i a i [ε (x)] ifadeleri ağırlık fonksiyonları olduğuna göre (5) eşitliğindeki örnek denklem için ağırlık fonksiyonları aşağıdaki gibi alınır: ε (x) a 2x + x 2 (19) ε (x) b 4x + x 3 4 (20)
54 (19) ve (20) ağırlık fonksiyonları kullanılarak (8) denklemi aşağıdaki gibi yazılır: L (2ax + 4bx + ax + bx x)( 2x + x )dx = 0 (21) 0 L (2ax + 4bx + ax + bx x)( 4x + x )dx = 0 (22) 0 Yukarıdaki iki denklemi kullanarak a ve b sabit terimleri, dolayısıyla (6) denkleminde verilen yaklaşık deneme fonksiyonunu bulunur.
55
56
57 SEY ile çözümdeki adımlar şunlardır: a) Cismin sonlu elemanlara bölünmesi, b) İnterpolasyon fonksiyonlarının seçimi, c) Eleman direngenlik matrisinin teşkili, d) Sistem direngenlik matrisinin hesaplanması, e) Sisteme etki eden kuvvetlerin bulunması, f) Sınır şartlarının belirlenmesi, g) Sistem denklemlerinin çözümü.
58 Sonlu eleman probleminin çözümünde ilk adım eleman tipinin belirlenmesi ve çözüm bölgesinin elemanlara ayrılmasıdır. Çözüm bölgesinin geometrik yapısı belirlenerek bu geometrik yapıya en uygun gelecek elemanlar seçilmelidir. Seçilen elemanların çözüm bölgesini temsil etme oranında, elde edilecek neticeler gerçek çözüme yaklaşmış olacaktır. Sonlu elemanlar metodunda kullanılan elemanlar boyutlarına göre dört kısma ayrılabilir:
59 a) Tek boyutlu elemanlar: Bu elemanlar tek boyutlu olarak ifade edilebilen problemlerin çözümünde kullanılır. b) İki boyutlu elemanlar: İki boyutlu (düzlem) problemlerinin çözümünde kullanılırlar. Bu grubun temel elemanı üç düğümlü üçgen elemandır. Üçgen elemanın altı, dokuz ve daha fazla düğüm ihtiva eden çeşitleri de vardır. Düğüm sayısı seçilecek interpolasyon fonksiyonunun derecesine göre belirlenir. Üçgen eleman, çözüm bölgesini aslına uygun olarak temsil etmesi bakımından kullanışlı bir eleman tipidir. İki üçgen elemanın birleşmesiyle meydana gelen dörtgen eleman, problemin geometrisine uyum sağladığı ölçüde kullanışlılığı olan bir elemandır. Dört veya daha fazla düğümlü olabilir. Dörtgen eleman çoğu zaman özel hal olan dikdörtgen eleman şeklinde kullanılır.
60 c) Dönel elemanlar: Eksenel simetrik özellik gösteren problemlerin çözümünde dönel elemanlar kullanılır. Bu elemanlar bir veya iki boyutlu elemanların simetri ekseni etrafında bir tam dönme yapmasıyla oluşurlar. Gerçekte üç boyutlu olan bu elemanlar, eksenel simetrik problemleri iki boyutlu problem gibi çözme olanağı sağladığı için çok kullanışlıdırlar. d) Üç boyutlu elemanlar: Bu grupta temel eleman üçgen piramittir. Bunun dışında dikdörtgenler prizması veya daha genel olarak altı yüzeyli elemanlar, üç boyutlu problemlerin çözümünde kullanılan eleman tipleridir.
61 İnterpolasyon Fonksiyonlarının Seçimi: İnterpolasyon fonksiyonu alan değişkeninin (gerilme, yer değiştirme, sıcaklık vb.) eleman üzerindeki değişimini temsil etmektedir. İnterpolasyon fonksiyonunun belirlenmesi seçilen eleman tipine ve çözülecek denklemin derecesine bağlıdır. Ayrıca interpolasyon fonksiyonları şu şartları sağlamalıdır: a- İnterpolasyon fonksiyonunda bulunan alan değişkeni ve alan değişkeninin en yüksek mertebeden bir önceki mertebeye kadar olan kısmi türevleri eleman sınırlarında sürekli olmalıdır. b- İnterpolasyon fonksiyonunda bulunan alan değişkeninin bütün türevleri, eleman boyutları limitte sıfıra gitse bile alan değişkenini karakterize etmelidir. c- Seçilen interpolasyon fonksiyonu koordinat değişimlerinden etkilenmemelidir. Hem yukardaki şartları sağlamaları hemde türev ve integral almadaki kolaylığından dolayı interpolasyon fonksiyonu olarak genelde polinomlar seçilir. Seçilen polinom, yukarıdaki şartların gerçekleşmesi için uygun terimleri ihtiva etmelidir.
62 Eleman Direngenlik Matrisinin Elde Edilmesi: Eleman direngenliğinin bulunması, elemana etki eden dış etkenler ile alan değişkenleri arasında bir ilişki kurmak anlamına gelmektedir. Eleman direngenliğini elde ederken çözülecek problemin konusu, alan değişkeni, seçilen eleman tipi, seçilen interpolasyon fonksiyonu, eleman özelliklerini elde ederken kullanılan metod gibi pek çok faktör göz önüne alınmak durumundadır. Etki eden bu faktörlere göre de eleman direngenliğinin elde edilmesinde değişik yollar izlenir.
63 Sistem Direngenlik Matrisinin Teşkili:Sistem direngenlik matrisi sistemin düğüm sayısı ve her düğümdeki serbestlik derecesine bağlı olarak belirlenir. Elemanlar için hesaplanan direngenlik matrisleri, elemanın üzerindeki düğüm numaralarına bağlı olarak genel direngenlik matrisinde ilgili satır ve sütununa yerleştirilir. Farklı elemanlar tarafından ortak kullanılan düğümlerdeki terimler genel direngenlik matrisinin ilgili satır ve sütununda üst üste toplanmalıdır. Elemanların düğüm numaralaması bir sistematiğe göre yapılırsa genel direngenlik matrisinde elemanlar diagonal üzerinde üst üste toplanır. Genelde direngenlik matrisi simetriktir.
64 Sisteme Etki Eden Kuvvetlerin Bulunması: Bir problemde sisteme etki edebilecek kuvvetler şunlar olabilir: -Tekil Kuvvetler: Tekil kuvvetler hangi elemanın hangi düğümüne ne yönde etki ediyorsa genel kuvvet vektöründe etki ettiği düğüme karşılık gelen satıra yerleştirilir. Problemin cinsine göre tekil yük kavramı değişebilir Örneğin ısı iletimi probleminde elastisite problemindeki tekil yüke karşılık noktasal ısı kaynağı veya tanımlı ısı akışı yükleri bulunmaktadır. -Yayılı Kuvvetler: Bu kuvvetler bir kenar boyunca yada bir alanda etkili olurlar. -Kütle kuvvetleri: Eleman hacmi için geçerli olan merkezkaç kuvveti ve ağırlık kuvvetleri gibi kuvvetlerdir.
65 Sınır Şartlarının Belirlenmesi: Her problemin tabii olarak yada yapay sınır şartları vardır. Sınır şartları, cismin çeşitli kısımlarındaki elastik yer değiştirmelerin ölçülebileceği bir referans sağlar. Bir çubuk elaman ele alalım (Şekil 1a). Bu eleman için bir sınır şartı tanımlanmazsa, etki eden düğüm kuvvetlerinin büyük, küçük yada eşit olmasına göre hareket eder ve deplasman u 1 =u 2 olarak çubukta rijit cisim hareketi gözlenir.
66
67 Birinci durumdaki rijit cisim hareketi genel direngenlik matrisinin tekil olmasına sebep olur. Bu durum u 1 ve u 2 'nin ölçüleceği bir referans noktasının belirlenmemiş olmasına bağlanabilir. Gerçekte bir referans noktası sağlanmak zorundadır. Aynı çubuğu (Şekil 1b.) deki gibi düşündüğümüzde; şeklinde ifade edebiliriz. Çünkü u 1 =0 çubuğun sınır şartıdır. Böylece sınır şartları; cismin belli parçasında veya parçalarındaki yer değiştirmelerde yapılan kısıtlamalardır denilebilir. Bu kısıtlamalar, cismin rijit yer değiştirmesine engel olur ve uygulanan dış yüklerin cisim tarafından taşınmasını sağlar. Aynı sınır şartları problemin cinsine göre sonlu elemanlar metodunun uygulandığı diğer vektörel ve skaler alan problemleri için de tanımlanır.
68 Sistem Denkleminin Çözümü: Çözüm için, sistemin sınır şartları da göz önüne alınarak direngenlik matrisinin tersini almak yeterlidir. Fakat bilgisayar kapasitesi ve bilgisayar zamanı açısından çok büyük matrislerin çözümünü ters alma işlemi ile yapmak yerine Gauss eliminasyon metodu ile daha az kapasite ve daha kısa sürede yapmak mümkün olmaktadır.
69 Potansiyel Enerji (Yaklaşık çözüm için) Potansiyel enerji, sistemin konumunu belirleyen koordinatlara bağlı olarak bir integral ifade ile elde edilebilir. Sınır şartlarını gerçekleyen durumlarda cismin dengede olabilmesi için potansiyel enerjinin bir ekstremde olması gerekir. Bir çok durumda bu ekstrem değer bir minimumdur ve bu nedenle yöntem minimum potansiyel enerji yöntemi olarak adlandırılır.
70 Örneğin, rastgele yüklenmiş basit mesnetli bir kirişte kirişin çökme eğrisi araştırılıyor olsun. Mümkün olan bir çok çökme eğrisi arasında gerçek çökme eğrisi, verilen sınır şartları altında kiriş için yazılacak potansiyel enerji ifadesinin minimum olmasını sağlayan eğri olacaktır. Bunda da iç kuvvetler tarafından meydana getirilen potansiyel enerji ile dış kuvvetlerin oluşturduğu potansiyel enerji etkili olacaktır. İç kuvvetlerin potansiyel enerjisi şekil değiştirme enerjisinden, dış kuvvetlerinki de uygulanan kuvvet sebebiyle meydana gelen yer değiştirmenin çarpımı (iş) şeklinde bulunur.
71 U şekil değiştirme enerjisini, W ise iş potansiyelini göstermektedir. Şekil değiştirme enerjisi aşağıdaki gibidir. {u}=[u, v w] deplasmanları (yer değiştirmeleri), {f}=[fx, fy, fz] kütle kuvvetlerini, {T}={Tx, Ty, Tz] yüzey kuvvetlerini ve {P}i de tekil kuvvetleri göstermek üzere, iş potansiyeli ise aşağıdaki gibidir.
72 (-) işareti potansiyel enerjinin kaybı (azalması) anlamına gelir veya dış kuvvetlerin yaptığı iş negatif alınır şeklinde açıklanabilir Bu durumda toplam potansiyel enerji, Minimizasyon için aşağıdaki ifade kullanılır.
73 Rayleigh-Ritz Yöntemi Bu yöntem, Toplam Potansiyel Enerjinin minimize edilmesi esasına dayanır. Sınır koşullarını sağlayan, yaklaşık bir deneme fonksiyonu, toplam potansiyel enerji denkleminde yerine yazılır, toplam potansiyel enerjinin, yaklaşık deneme fonksiyonunun sabit terimine göre türevi ifadesinin, sıfıra eşitlendiği denklem çözülerek yaklaşık deneme fonksiyonunun sabit terimi bulunur.
74
75 Bir Boyutlu Problemler Bir boyutlu problemlerde gerilme {σ}, şekil değiştirme {ε}, yer değiştirme {u} ve yükleme ({T} ve {ƒ}) yalnızca bir boyut değişkenine (x) bağlıdır. Bu durumda ilgili vektörler aşağıdaki şekilde verilebilir. Gerilme-şekil değiştirme ve şekil değiştirme-yer değiştirme ilişkisi,
76 Diferansiyel hacim (dv) ifadesi; Yüklemeler genelde kütle (ağırlık) kuvvetleri ({ƒ}), yüzey kuvvetleri ({T}) ve tekil yük ({P i }) olmak üzere üç şekilde bulunur. Bu kuvvetlerin bir cisim üzerindeki konumları Şekil 1 de gösterilmiştir. Kütle kuvvetleri, tüm hacme dağılmış kuvvetler olup yerçekimi nedeniyle oluşan cismin ağırlığı buna örnektir. Yüzey kuvvetleri cismin yüzeyine dağılmış kuvvetler olup birim yüzey alanına düşen kuvvet olarak ele alınır.
77 Bir boyutlu problemlerde yüzey kuvveti birim boya etkiyen kuvvet olarak ta tanımlanabilir. Sürtünme nedeniyle oluşan kuvvetler ve basınç kuvvetleri buna örnek olarak gösterilebilir. Yüzey kuvveti birim alana düşen kuvvet ile kesit alanın çarpımı olarak ele alınır. Son olarak {P i }, i noktasına etki eden tekil kuvvet ve {u i } de bu noktanın x doğrultusundaki yer değiştirmesidir.
78 Şekil 1. Kütle kuvvetleri, yüzey kuvvetleri ve tekil kuvvetler altındaki çubuğun sonlu elemanlar modeli.
79 Şekil 1 deki çubuğu göz önüne alalım. Sonlu eleman modellemesinde ilk olarak, çubuk belirli sayıda sabit kesitli elemanlardan meydana gelmiş kademeli çubuk olarak ele alınır. Burada çubuğu dört eleman kullanarak modelleyelim. Bu işi yapmanın en kolay yolu çubuğu Şekil 1b'deki gibi dört bölgeye ayırmaktır. Bundan sonra her bir bölgenin ortalama kesit alanı bulunarak eleman tanımlamalarında bu değer kullanılır. Ele alınan çubuğun dört eleman ve beş düğümden oluşan sonlu eleman modeli Şekil 1c de gösterilmiştir. Sonlu eleman modelinde bütün elemanlar düğüm noktalarından birbirine bağlı olarak düşünülür. SONLU ELEMAN MODELLEMESİ Elemanlara ayırma
80 Şekil 1c'de eleman numaraları, düğüm numaralarından ayırt edilmesi için yuvarlak içine alınmıştır. Görüldüğü gibi, kesit alanı, yüzey kuvveti ve kütle kuvvetleri her eleman için sabittir. Doğal olarak kesit alanları ve kuvvetler şiddetleri bakımından elemandan elemana değişebilirler. Eleman sayıları artırılarak daha iyi sonuçlar elde edilebilir. Tekil yüklerin uygulanmış olduğu noktaların düğüm noktası olarak seçilmesi gerekir. Cisme etkiyen diğer kuvvetler de yalnızca düğüm noktalarından etki ediyormuş gibi ele alınırlar.
81 Numaralandırma Yöntemi Karmaşık bir geometriye sahip bir cisim belirli sayıda, düzgün şekilli ve benzer elemanlara ayrılmalıdır. Elemanların birbirine benzer alınmasının sebebi, modelin bilgisayar ortamına aktarılmasının kolaylaştırılmasıdır. Bu aktarım uygun bir numaralama yöntemi geliştirilmesi ile daha da kolay hale getirilebilir. Burada bu yöntemlerden birisi verilecektir. Serbestlik dereceleri, düğüm deplasmanları, düğüm yükleri ve elemanlar arasında süreklilik sonlu elemanlar metodunun uygulamasında ve bilgisayar ortamına aktarılmasındaki temel noktalardır ve bu nedenle bu kavramların iyi anlaşılması ve uygun şekilde tatbik edilmesi gerekmektedir.
82 Bir boyutlu problemde her düğümün sadece ±x doğrultusunda hareketine müsaade edilir. Bu yüzden her düğüm sadece bir serbestlik derecesine (SD) sahiptir. Şekil 1c'de verilen 5 düğümlü sonlu eleman modelinde 5 serbestlik derecesi vardır. Her serbestlik derecesindeki deplasman Q 1,Q 2,...Q 5 ile gösterilir. Bu durumda global deplasman vektörü olarak adlandırılan {Q}, ({Q}= [ Q 1, Q 2,...Q 5 ] T ) bir sütun vektörüdür.
83 {F} ile gösterilen global kuvvet vektörü {F}= [ F 1, F 2,...F 5 ] dir. Global kuvvet ve deplasman vektörleri Şekil 2'de gösterilmiştir. +x yönü kuvvet ve deplasman için pozitif yön olarak alınır. Bundan sonra sınır şartları göz önüne alınır. Ele aldığımız problem için 1 numaralı düğüm tutulmuştur, dolayısıyla Q 1 = 0'dır. Sınır şartları daha sonra izah edilecektir.
84
85 Her elemanda 2 düğüm vardır, dolayısıyla elemanlar arasındaki süreklilik bilgileri Şekil 3 teki gibi bir tablo halinde elde edilebilir. Tablo başlığındaki 1 ve 2 rakamları elemanın lokal düğüm numaralarını, tablo içindeki rakamlar ise global düğüm numaralarını göstermektedir. Lokal düğüm numaraları ile global düğüm numaraları arasındaki uyumluluk elemanlar arasında süreklik sağlar. Bu örnekte, 1. düğümün numarası aynı zamanda 1. elemanın da numarası olduğundan tanımlama basitçe yapılabilmektedir. Daha karmaşık geometrilerde süreklilik tablosunun yapılmasına ihtiyaç duyulur.
86
87 Koordinatlar ve şekil fonksiyonları İki düğümlü bir çubuk eleman (e) ele alalım (Şekil 4a). Lokal numaralandırma ile ilk düğümün numarası 1, diğerininki ise 2 olarak numaralandırılır. Buradan, birinci düğümün koordinatı x 1 ve ikinci düğümün koordinatı x 2 dir. Buradan, elemanın orta noktasına göre herhangi bir noktasının yerini 1 ile 1 değerleri arasında bulmak için r ile gösterilen bir doğal koordinat sistemi tanımlayalım. Birinci düğümde r=-1, ikinci düğümde ise r=1 değerini almaktadır. (Şekil 4b). Bu koordinat sistemi, şekil fonksiyonlarının tanımlanmasında kullanılır.
88
89 Bir eleman içindeki bilinmeyen yer değiştirmeler lineer bir interpolasyon fonksiyonu ile hesaplanmaya çalışılır (Şekil 5). Yaklaşık bir çözüm olan bu yöntemde doğruluk değeri ancak daha fazla sayıda elemana bölmek suretiyle artırılabilir. Bu lineer interpolasyonu uygulamak için aşağıdaki şekilde lineer şekil fonksiyonları tanımlanır.
90
91 Şekil 6a ve 6b'de N 1 ve N 2 şekil fonksiyonları gösterilmiştir. N 1 şekil fonksiyonunun grafiği denklem 5 ten yararlanılarak çizilmiştir. Burada r=-1' de N 1 =1 ve r=1 de N 1 = 0 olduğuna dikkat edilmelidir. İki noktadan bir doğru geçtiği dikkate alınırsa Şekil 7a elde edilir. Benzer olarak, N 2 şekil fonksiyonunun grafiği olan Şekil 7b, denklem 6'dan elde edilir. Şekil fonksiyonları tanımlandıktan sonra elemandaki yer değiştirmeler, düğüm deplasmanları q 1 ve q 2 ye bağlı olarak şu şekilde elde edilir. Matris gösterimi ile,
92
93 Eleman yer değiştirme vektörünü olan {q}, (7a)'da verildiği üzere birinci düğümde u = q 1, ikinci düğümde u = q 2 durumunu sağlamaktadır. Şekil fonksiyonlarının özelliği gereği iki düğüm arasında u lineer olarak değişmektedir. (4) iadesinden yararlanarak global ve lokal koordinatlar arsındaki dönüşüm şekil fonksiyonları yardımıyla,
94 Görüldüğü gibi hem deplasmanlar (eşitlik 7a), hem de koordinatlar (eşitlik 9) aynı şekil fonksiyonları yardımıyla ifade edilmektedir. Bu durum izoparametrik (eş parametreli) formülasyon olarak adlandırılmaktadır. Burada her ne kadar lineer interpolasyon fonksiyonları verilmiş ise de eleman içerisinde birinci türevin sonlu olması ve eleman sınırlarında deplasmanların sürekli olması şartıyla başka şekil fonksiyonlarının seçilmesi de mümkündür.
95
96 (2)'de verilen şekil değiştirme-yer değiştirme ilişkisi (ε=du/dx) ve zincir kuralı kullanılarak; x ve r arasındaki ilişkiden; olduğundan; du dr q 1 q 2 2
97 (10) ifadesinden, Matris formunda, [B] (1x2), boyutlarında olup eleman şekil değiştirme-yer değiştirme matrisi olarak adlandırılır.
98 Lineer şekil fonksiyonları kullanımı sebebiyle [B] sabit bir matristir. Dolayısıyla bir eleman içindeki şekil değiştirme de sabittir. Hooke yasasından gerilme; Lineer şekil fonksiyonları kullanımı sebebiyle, eleman içinde gerilmenin de sabit olduğu görülür. İnterpolasyon amacıyla burada elde edilen gerilmenin elemanın merkezinden geçen eksen üzerindeki gerilme olduğu kabul edilebilir. (7b), (14) ve (16) ifadeleri sırasıyla, düğümlerdeki deplasman, şekil değiştirme ve gerilme arasındaki ilişkiyi ortaya koyar. Bu ifadeler çubuk eleman için potansiyel enerji ifadesinde yerleştirilerek eleman rijitlik matrisi ve yük vektörünü bulmak için kullanılacaktır.
99 Potansiyel enerji yaklaşımı Toplam potansiyel enerji bir boyutlu problemler için; Burada {σ}, gerilmeyi {ε},birim şekil değiştirmeleri, {u}, deplasmanları (yer değiştirmeleri),{ƒ} kütle kuvvetlerini ve {T} yüzey kuvvetlerini,göstermektedir. Son terimdeki {P i }, i noktasında u i deplasmanını meydana getiren kuvvettir. u i ise i düğümünde x yönündeki deplasmandır. Eleman üzerindeki bütün düğümler için toplam potansiyel enerji ifadesi aşağıdaki şekilde ifade edilebilir.
100 Son terimde P i yüklerinin düğüm noktalarından uygulandığı düşünülmektedir. alınırsa; U e, eleman şekil değiştirme enerjisi olarak adlandırılır.
101 Eleman Rijitlik (Direngenlik) Matrisi Üstteki şekil değiştirme enerjisi ifadesinde, (14) ve (16) da verilen gerilme ve şekil değiştirme ifadeleri yazıldığında,
102 Elemanın kesit alanı (A e ) sabittir. Aynı zamanda [B] de sabit bir matristir. (11)'deki ifadesinden, x 2 x 1 = l e alınırsa,
103 Elemanın boyu (l e ) ve - 1 r 1 olmak üzere eleman şekil değiştirme enerjisi U e aşağıdaki gibi yazılabilir. E e elemanının elastisite modülüdür.
104 [k] e, çubuk eleman için eleman rijitlik (direngenlik) matrisi olmak üzere, Eleman rijitlik matrisi ise, Burada şekil değiştirme enerjisi bağıntısı ile U= ½ kx 2 ile verilen basit yaydaki şekil değiştirme enerjisi arasındaki benzerlik görülmektedir. Burada k e A e E e (axial rigidity) çarpımı ile doğru orantılı, eleman boyu ile de ters orantılıdır.
105 Kuvvet Terimleri Toplam potansiyel enerji ifadesindeki kütle kuvveti terimini, inceleyelim. yerine koyulursa, A ve ƒ de eleman içinde sabit olduğundan integral dışına çıkarılırsa
106 Şekil fonksiyonların integralleri dx= (Le/2) dr yazılarak alınır ve ifadede yerine konursa, e e e N dx 1 e ve N 2 e dx ifadeleri benzer şekilde şekil fonksiyon grafiği altında kalan alan l e /2 yi verir. Dolayısıyla (28) deki kütle kuvveti ifadesi,
107 Görüldüğü gibi kütle kuvvet vektörü ƒ e şöyledir, Kütle kuvvet vektörü, A e l e elemanın hacmi ve ƒ'de birim hacimdeki kütle kuvveti olduğundan, A e l e ƒ çarpımı elemana etkileyen toplam kütle kuvvetini ifade eder. (31)'deki ½ ifadesi kütle kuvvetinin 2 düğüme eşit olarak dağıldığını göstermektedir.
108 Şimdi de toplam potansiyel enerji formülasyonunda bulunan yüzey kuvvetlerini inceleyelim. yüzey kuvvetinin (T), elemanda sabit olduğu düşünülürse;
109 Görüldüğü gibi eleman yüzey kuvveti de düğümlere eşit olarak dağılmaktadır. Buraya kadar rijitlik matrisi [k e ], kütle kuvvet vektörü [ƒ e ] ve yüzey kuvvet vektörlerini [T e ] bir eleman için elde ettik. Elemanlar arasındaki sürekliliği de elde ettikten sonra, (18) de verilen toplam potansiyel enerji ifadesi,
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ
 İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 10 Eylemsizlik Momentleri Kaynak: Mühendislik Mekaniği: Statik, R. C.Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 10. Eylemsizlik Momentleri
ELASTİSİTE TEORİSİ I. Yrd. Doç Dr. Eray Arslan
 ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
ELASTİSİTE TEORİSİ I Yrd. Doç Dr. Eray Arslan Mühendislik Tasarımı Genel Senaryo Analitik çözüm Fiziksel Problem Matematiksel model Diferansiyel Denklem Problem ile ilgili sorular:... Deformasyon ne kadar
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 9 Ağırlık Merkezi ve Geometrik Merkez Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 9. Ağırlık
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
MAK 210 SAYISAL ANALİZ BÖLÜM 5- SONLU FARKLAR VE İNTERPOLASYON TEKNİKLERİ Doç. Dr. Ali Rıza YILDIZ MAK 210 - Sayısal Analiz 1 İNTERPOLASYON Tablo halinde verilen hassas sayısal değerler veya ayrık noktalardan
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 4 Laminatların Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 4 Laminatların
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ
 BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
BÖLÜM 1: MADDESEL NOKTANIN KİNEMATİĞİ 1.1. Giriş Kinematik, daha öncede vurgulandığı üzere, harekete sebep olan veya hareketin bir sonucu olarak ortaya çıkan kuvvetleri dikkate almadan cisimlerin hareketini
Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta ( ):
 Elektronik posta ( ):") Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
Tanışma ve İletişim... Doç. Dr. Muhammet Cerit Öğretim Üyesi Makine Mühendisliği Bölümü (Mekanik Ana Bilim Dalı) Elektronik posta (e-mail): mcerit@sakarya.edu.tr Öğrenci Başarısı Değerlendirme... Öğrencinin
İÇİNDEKİLER. ÖNSÖZ... iii İÇİNDEKİLER... v
 İÇİNDEKİLER ÖNSÖZ... iii İÇİNDEKİLER... v BÖLÜM 1.... 1 1.1. GİRİŞ VE TEMEL KAVRAMLAR... 1 1.2. LİNEER ELASTİSİTE TEORİSİNDE YAPILAN KABULLER... 3 1.3. GERİLME VE GENLEME... 4 1.3.1. Kartezyen Koordinatlarda
İÇİNDEKİLER ÖNSÖZ... iii İÇİNDEKİLER... v BÖLÜM 1.... 1 1.1. GİRİŞ VE TEMEL KAVRAMLAR... 1 1.2. LİNEER ELASTİSİTE TEORİSİNDE YAPILAN KABULLER... 3 1.3. GERİLME VE GENLEME... 4 1.3.1. Kartezyen Koordinatlarda
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ BÖLÜM 7- SAYISAL TÜREV Doç. Dr. Ali Rıza YILDIZ 1 GİRİŞ İntegral işlemi gibi türev işlemi de mühendislikte çok fazla kullanılan bir işlemdir. Basit olarak bir fonksiyonun bir noktadaki
MAK 210 SAYISAL ANALİZ
 MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
MAK 210 SAYISAL ANALİZ BÖLÜM 8- SAYISAL İNTEGRASYON 1 GİRİŞ Mühendislikte sık karşılaşılan matematiksel işlemlerden biri integral işlemidir. Bilindiği gibi integral bir büyüklüğün toplam değerinin bulunması
1.1 Yapı Dinamiğine Giriş
 1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
1.1 Yapı Dinamiğine Giriş Yapı Dinamiği, dinamik yükler etkisindeki yapı sistemlerinin dinamik analizini konu almaktadır. Dinamik yük, genliği, doğrultusu ve etkime noktası zamana bağlı olarak değişen
Elastisite Teorisi Düzlem Problemleri için Sonuç 1
 Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
Elastisite Teorisi Düzlem Problemleri için Sonuç 1 Düzlem Gerilme durumu için: Bilinmeyenler: Düzlem Şekil değiştirme durumu için: Bilinmeyenler: 3 gerilme bileşeni : 3 gerilme bileşeni : 3 şekil değiştirme
SONLU ELEMANLAR YÖNTEMI ile (SAP2000 UYGULAMASI) 3D Frame Analysis. Reza SHIRZAD REZAEI
 3D Frame Analysis. Reza SHIRZAD REZAEI") SONLU ELEMANLAR YÖNTEMI ile (SAP2000 UYGULAMASI) 3D Frame Analysis Reza SHIRZAD REZAEI SONLU ELEMANLAR YÖNTEMİ Sonlu Elemanlar (SE)Yöntemi, çesitli mühendislik problemlerine kabul edilebilir bir yaklasımla
SONLU ELEMANLAR YÖNTEMI ile (SAP2000 UYGULAMASI) 3D Frame Analysis Reza SHIRZAD REZAEI SONLU ELEMANLAR YÖNTEMİ Sonlu Elemanlar (SE)Yöntemi, çesitli mühendislik problemlerine kabul edilebilir bir yaklasımla
Doç. Dr. Bilge DORAN
 Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
Doç. Dr. Bilge DORAN Bilgisayar teknolojisinin ilerlemesi doğal olarak Yapı Mühendisliğinin bir bölümü olarak tanımlanabilecek sistem analizi (hesabı) kısmına yansımıştır. Mühendislik biliminde bilindiği
EKSENEL YÜKLERDEN OLUŞAN GERILME VE ŞEKİL DEĞİŞİMİ Eksenel yüklü elemanlarda meydana gelen normal gerilmelerin nasıl hesaplanacağı daha önce ele
 EKSENEL YÜKLERDEN OLUŞAN GERILME VE ŞEKİL DEĞİŞİMİ Eksenel yüklü elemanlarda meydana gelen normal gerilmelerin nasıl hesaplanacağı daha önce ele alınmıştı. Bu bölümde ise, eksenel yüklü elemanların şekil
EKSENEL YÜKLERDEN OLUŞAN GERILME VE ŞEKİL DEĞİŞİMİ Eksenel yüklü elemanlarda meydana gelen normal gerilmelerin nasıl hesaplanacağı daha önce ele alınmıştı. Bu bölümde ise, eksenel yüklü elemanların şekil
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 5 Rijit Cisim Dengesi Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 5. Rijit Cisim Dengesi Denge,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
4. Sonlu elemanlar yer değiştirme metodu, modelleme, tanımlar
 4. Sonlu Elemanlar Yer Değiştirme Metodu modelleme tanımlar 4. Sonlu elemanlar yer değiştirme metodu modelleme tanımlar. bölümde örneklerle açıklanan RITZ metodu.5. ve.5 bağıntıları yerine kullanılabilen
4. Sonlu Elemanlar Yer Değiştirme Metodu modelleme tanımlar 4. Sonlu elemanlar yer değiştirme metodu modelleme tanımlar. bölümde örneklerle açıklanan RITZ metodu.5. ve.5 bağıntıları yerine kullanılabilen
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 2 Laminanın Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 2 Laminanın Makromekanik
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 2 Laminanın Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 2 Laminanın Makromekanik
Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir.
 STATIK VE MUKAVEMET 4. Ağırlık Merkezi AĞIRLIK MERKEZİ Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir. Statikte çok küçük bir alana etki eden birbirlerine
STATIK VE MUKAVEMET 4. Ağırlık Merkezi AĞIRLIK MERKEZİ Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir. Statikte çok küçük bir alana etki eden birbirlerine
UYGULAMALI ELASTİSİTE TEORİSİ
 KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI ELASTİSİTE TEORİSİ Prof.Dr. Paşa YAYLA 2010 ÖNSÖZ Bu kitabın amacı öğrencilere elastisite teorisi ile ilgili teori ve formülasyonu
KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ UYGULAMALI ELASTİSİTE TEORİSİ Prof.Dr. Paşa YAYLA 2010 ÖNSÖZ Bu kitabın amacı öğrencilere elastisite teorisi ile ilgili teori ve formülasyonu
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER
 EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
EŞİTLİK KISITLI TÜREVLİ YÖNTEMLER LAGRANGE YÖNTEMİ Bu metodu incelemek için Amaç fonksiyonu Min.z= f(x) Kısıtı g(x)=0 olan problemde değişkenler ve kısıtlar genel olarak şeklinde gösterilir. fonksiyonlarının
5. RITZ metodunun elemana uygulanması, elemanın rijitlik matrisi
 5. RITZ metodunun elemana uygulanması, elemanın rijitlik matrisi u bölümde RITZ metodu eleman bazında uygulanacak, elemanın yer değiştirme fonksiyonu, şekil değiştirme, gerilme bağıntıları, toplam potansiyeli,
5. RITZ metodunun elemana uygulanması, elemanın rijitlik matrisi u bölümde RITZ metodu eleman bazında uygulanacak, elemanın yer değiştirme fonksiyonu, şekil değiştirme, gerilme bağıntıları, toplam potansiyeli,
18.034 İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
İÇİNDEKİLER. Bölüm 2 CEBİR 43
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 13 1.1 Doğal Sayılar 15 1.1.1. Tek ve Çift Sayılar 15 1.1.2. Asal Sayılar 15 1.1.3 Doğal Sayıların Özellikleri 15 1.1.4 Doğal Sayılarda Özel Toplamlar 16 1.1.5. Faktöriyel
p 2 p Üçgen levha eleman, düzlem şekil değiştirme durumu
 Üçgen levha eleman düzlem şekil değiştirme durumu Üçgen levha eleman düzlem şekil değiştirme durumu İstinat duvarı basınçlı uzun boru tünel ağırlık barajı gibi yapılar düzlem levha gibi davranırlar Uzun
Üçgen levha eleman düzlem şekil değiştirme durumu Üçgen levha eleman düzlem şekil değiştirme durumu İstinat duvarı basınçlı uzun boru tünel ağırlık barajı gibi yapılar düzlem levha gibi davranırlar Uzun
STATIK VE MUKAVEMET 4. Ağırlık Merkezi. Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK VE MUKAVEMET 4. Ağırlık Merkezi Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ AĞIRLIK MERKEZİ Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir. Statikte çok küçük
STATIK VE MUKAVEMET 4. Ağırlık Merkezi Yrd. Doç. Dr. NURHAYAT DEĞİRMENCİ AĞIRLIK MERKEZİ Gerçekte yükler yayılı olup, tekil yük problemlerin çözümünü kolaylaştıran bir idealleştirmedir. Statikte çok küçük
 5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
5. 5. 5.3 5.4 5.5 5.6 5.7 5.8 Rijit Cisimde Denge Düzlem Kuvvetlerde Denge Hali Düzlemde Serbestlik Derecesi Bağ Çeşitleri Pandül Ayak Düzlem Taşıyıcı Sistemler Düzlem Taşıyıcı Sistemlerde Yükleme Durumları
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM
 BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
BÖLÜM 4: MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1. Giriş Bir önceki bölümde, hareket denklemi F = ma nın, maddesel noktanın yer değiştirmesine göre integrasyonu ile elde edilen iş ve enerji denklemlerini
SONLU ELEMANLAR YÖNTEMİ (SAP2000 UYGULAMASI) I. Genel Kavramlar
 I. Genel Kavramlar") Deprem ve Yapı Bilimleri GEBZE TEMSİLCİLİĞİ SONLU ELEMANLAR YÖNTEMİ (SAP2000 UYGULAMASI) I. Genel Kavramlar Dr. Yasin Fahjan fahjan@gyte.edu.tr http://www.gyte.edu.tr/deprem/ SONLU ELEMANLAR YÖNTEMİ Sonlu
Deprem ve Yapı Bilimleri GEBZE TEMSİLCİLİĞİ SONLU ELEMANLAR YÖNTEMİ (SAP2000 UYGULAMASI) I. Genel Kavramlar Dr. Yasin Fahjan fahjan@gyte.edu.tr http://www.gyte.edu.tr/deprem/ SONLU ELEMANLAR YÖNTEMİ Sonlu
STATIK MUKAVEMET. Doç. Dr. NURHAYAT DEĞİRMENCİ
 STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
STATIK MUKAVEMET Doç. Dr. NURHAYAT DEĞİRMENCİ STATİK DENGE KOŞULLARI Yapı elemanlarının tasarımında bu elemanlarda oluşan iç kuvvetlerin dağılımının bilinmesi gerekir. Dış ve iç kuvvetlerin belirlenmesinde
İki Boyutlu Yapılar için Doğrudan Rijitlik Metodu (Direct Stiffness Method) (İleri Yapı Statiği II. Kısım)
 (İleri Yapı Statiği II. Kısım)") İki Boyutlu Yapılar için Doğrudan Rijitlik Metodu (Direct Stiffness Method) (İleri Yapı Statiği II. Kısım) Doç. Dr. Özgür Özçelik Dokuz Eylül Üniversitesi, Müh. Fak., İnşaat Müh. Böl. Genel Genel Genel
İki Boyutlu Yapılar için Doğrudan Rijitlik Metodu (Direct Stiffness Method) (İleri Yapı Statiği II. Kısım) Doç. Dr. Özgür Özçelik Dokuz Eylül Üniversitesi, Müh. Fak., İnşaat Müh. Böl. Genel Genel Genel
Tablo 1 Deney esnasında kullanacağımız numunelere ait elastisite modülleri tablosu
 BASİT MESNETLİ KİRİŞTE SEHİM DENEYİ Deneyin Amacı Farklı malzeme ve kalınlığa sahip kirişlerin uygulanan yükün kirişin eğilme miktarına oranı olan rijitlik değerin değişik olduğunun gösterilmesi. Kiriş
BASİT MESNETLİ KİRİŞTE SEHİM DENEYİ Deneyin Amacı Farklı malzeme ve kalınlığa sahip kirişlerin uygulanan yükün kirişin eğilme miktarına oranı olan rijitlik değerin değişik olduğunun gösterilmesi. Kiriş
Yapı Sistemlerinin Hesabı İçin. Matris Metotları. Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL Bahar Yarıyılı
 Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
Yapı Sistemlerinin Hesabı İçin Matris Metotları 05-06 Bahar Yarıyılı Prof.Dr. Engin ORAKDÖĞEN Doç.Dr. Ercan YÜKSEL BÖLÜM VIII HAREKET DENKLEMİ ZORLANMIŞ TİTREŞİMLER SERBEST TİTREŞİMLER Bu bölümün hazırlanmasında
MKM 308 Makina Dinamiği. Eşdeğer Noktasal Kütleler Teorisi
 MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MKM 308 Eşdeğer Noktasal Kütleler Teorisi Eşdeğer Noktasal Kütleler Teorisi Maddesel Nokta (Noktasal Kütleler) : Mekanikte her cisim zihnen maddesel noktalara ayrılabilir yani noktasal kütlelerden meydana
MUKAVEMET Öğr. Gör. Fatih KURTULUŞ
 www.sakarya.edu.tr MUKAVEMET Öğr. Gör. Fatih KURTULUŞ www.sakarya.edu.tr 1. DÜŞEY YÜKLÜ KİRİŞLER Cisimlerin mukavemeti konusunun esas problemi, herhangi bir yapıya uygulanan bir kuvvetin oluşturacağı gerilme
www.sakarya.edu.tr MUKAVEMET Öğr. Gör. Fatih KURTULUŞ www.sakarya.edu.tr 1. DÜŞEY YÜKLÜ KİRİŞLER Cisimlerin mukavemeti konusunun esas problemi, herhangi bir yapıya uygulanan bir kuvvetin oluşturacağı gerilme
KAYMA GERİLMESİ (ENİNE KESME)
") KAYMA GERİLMESİ (ENİNE KESME) Demir yolu traversleri çok büyük kesme yüklerini taşıyan kiriş olarak davranır. Bu durumda, eğer traversler ahşap malzemedense kesme kuvvetinin en büyük olduğu uçlarından
KAYMA GERİLMESİ (ENİNE KESME) Demir yolu traversleri çok büyük kesme yüklerini taşıyan kiriş olarak davranır. Bu durumda, eğer traversler ahşap malzemedense kesme kuvvetinin en büyük olduğu uçlarından
Saf Eğilme(Pure Bending)
") Saf Eğilme(Pure Bending) Saf Eğilme (Pure Bending) Bu bölümde doğrusal, prizmatik, homojen bir elemanın eğilme etkisi altındaki şekil değiştirmesini/ deformasyonları incelenecek. Burada çıkarılacak formüller
Saf Eğilme(Pure Bending) Saf Eğilme (Pure Bending) Bu bölümde doğrusal, prizmatik, homojen bir elemanın eğilme etkisi altındaki şekil değiştirmesini/ deformasyonları incelenecek. Burada çıkarılacak formüller
SONLU FARKLAR GENEL DENKLEMLER
 SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
SONLU FARKLAR GENEL DENKLEMLER Bir elastik ortamın gerilme probleminin Airy gerilme fonksiyonu ile formüle edilebilen halini göz önüne alalım. Problem matematiksel olarak bölgede biharmonik denklemi sağlayan
SONLU ELEMANLAR (FINITE ELEMENTS) YÖNTEMİ
 YÖNTEMİ") SONLU ELEMANLAR (FINITE ELEMENTS) YÖNTEMİ Sonlu Elemanlar Yöntemi, çeşitli mühendislik problemlerine kabul edilebilir bir yaklaşımla çözüm arayan bir sayısal çözüm yöntemidir. Uniform yük ır Sabit sın
SONLU ELEMANLAR (FINITE ELEMENTS) YÖNTEMİ Sonlu Elemanlar Yöntemi, çeşitli mühendislik problemlerine kabul edilebilir bir yaklaşımla çözüm arayan bir sayısal çözüm yöntemidir. Uniform yük ır Sabit sın
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ
 RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
RİJİT CİSİMLERİN DÜZLEMSEL KİNEMATİĞİ MUTLAK GENEL DÜZLEMSEL HAREKET: Genel düzlemsel hareket yapan bir karı cisim öteleme ve dönme hareketini eşzamanlı yapar. Eğer cisim ince bir levha olarak gösterilirse,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 2 Kuvvet Vektörleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö.Soyuçok. 2 Kuvvet Vektörleri Bu bölümde,
YAPI STATİĞİ II (Hiperstatik Sistemler) Yrd. Doç. Dr. Selçuk KAÇIN
 Yrd. Doç. Dr. Selçuk KAÇIN") YAPI STATİĞİ II (Hiperstatik Sistemler) Yrd. Doç. Dr. Selçuk KAÇIN Yapı Sistemleri: İzostatik (Statikçe Belirli) Sistemler : Bir sistemin tüm kesit tesirlerini (iç kuvvetlerini) ve mesnet reaksiyonlarını
YAPI STATİĞİ II (Hiperstatik Sistemler) Yrd. Doç. Dr. Selçuk KAÇIN Yapı Sistemleri: İzostatik (Statikçe Belirli) Sistemler : Bir sistemin tüm kesit tesirlerini (iç kuvvetlerini) ve mesnet reaksiyonlarını
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI
 MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
MATLAB DA SAYISAL ANALİZ DOÇ. DR. ERSAN KABALCI Konu Başlıkları Lineer Denklem Sistemlerinin Çözümü İntegral ve Türev İntegral (Alan) Türev (Sayısal Fark ) Diferansiyel Denklem çözümleri Denetim Sistemlerinin
Noktasal Cismin Dengesi
 Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 DOÇ.DR.
4. HAFTA BLM323 SAYISAL ANALİZ. Okt. Yasin ORTAKCI.
 4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
4. HAFTA BLM33 SAYISAL ANALİZ Okt. Yasin ORTAKCI yasinortakci@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi BLM33 DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
YAPI STATİĞİ MESNETLER
 YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
YAPI STATİĞİ MESNETLER Öğr.Gör. Gültekin BÜYÜKŞENGÜR STATİK Kirişler Yük Ve Mesnet Çeşitleri Mesnetler Ve Mesnet Reaksiyonları 1. Kayıcı Mesnetler 2. Sabit Mesnetler 3. Ankastre (Konsol) Mesnetler 4. Üç
23. Sistem denge denklemlerinin direkt kurulması
 . Sistem denge denklemlerinin direkt kurulması. Sistem denge denklemlerinin direkt kurulması Sonlu elemanlar metodu el hesapları için değil, bilgisayarda yazılımlar ile kullanılması için geliştirilmiştir.
. Sistem denge denklemlerinin direkt kurulması. Sistem denge denklemlerinin direkt kurulması Sonlu elemanlar metodu el hesapları için değil, bilgisayarda yazılımlar ile kullanılması için geliştirilmiştir.
DÜZLEMDE GERİLME DÖNÜŞÜMLERİ
 3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
3 DÜZLEMDE GERİLME DÖNÜŞÜMLERİ Gerilme Kavramı Dış kuvvetlerin etkisi altında dengedeki elastik bir cismi matematiksel bir yüzeyle rasgele bir noktadan hayali bir yüzeyle ikiye ayıracak olursak, F 3 F
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (2. Hafta)
") AĞIRLIK MERKEZİ STATİK (2. Hafta) Ağırlık merkezi: Bir cismi oluşturan herbir parçaya etki eden yerçeki kuvvetlerinin bileşkesinin cismin üzerinden geçtiği noktaya Ağırlık Merkezi denir. Şekil. Ağırlık
AĞIRLIK MERKEZİ STATİK (2. Hafta) Ağırlık merkezi: Bir cismi oluşturan herbir parçaya etki eden yerçeki kuvvetlerinin bileşkesinin cismin üzerinden geçtiği noktaya Ağırlık Merkezi denir. Şekil. Ağırlık
AÇI YÖNTEMİ Slope-deflection Method
 SAKARYA ÜNİVERSİTESİ İNŞAAT ÜHENDİSLİĞİ BÖLÜÜ Department of Civil Engineering İN 303 YAPI STATIĞI II AÇI YÖNTEİ Slope-deflection ethod Y.DOÇ.DR. USTAA KUTANİS kutanis@sakarya.edu.tr Sakarya Üniversitesi,
SAKARYA ÜNİVERSİTESİ İNŞAAT ÜHENDİSLİĞİ BÖLÜÜ Department of Civil Engineering İN 303 YAPI STATIĞI II AÇI YÖNTEİ Slope-deflection ethod Y.DOÇ.DR. USTAA KUTANİS kutanis@sakarya.edu.tr Sakarya Üniversitesi,
ELEKTRİKSEL POTANSİYEL
 ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
ELEKTRİKSEL POTANSİYEL Elektriksel Potansiyel Enerji Elektriksel potansiyel enerji kavramına geçmeden önce Fizik-1 dersinizde görmüş olduğunuz iş, potansiyel enerji ve enerjinin korunumu kavramları ile
BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER
 BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Yrd. Doç. Dr. Beytullah EREN Çevre Mühendisliği Bölümü BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Atatürk Barajı (Şanlıurfa) BATMIŞ YÜZEYLERE ETKİYEN KUVVETLER
BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Yrd. Doç. Dr. Beytullah EREN Çevre Mühendisliği Bölümü BATMIŞ YÜZEYLERE GELEN HİDROSTATİK KUVVETLER Atatürk Barajı (Şanlıurfa) BATMIŞ YÜZEYLERE ETKİYEN KUVVETLER
ATALET MOMENTİ. Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması.
 ATALET MOMENTİ Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması. UYGULAMALAR Şekilde gösterilen çark büyük bir kesiciye bağlıdır. Çarkın kütlesi, kesici bıçağa
ATALET MOMENTİ Amaçlar 1. Rijit bir cismin veya rijit cisim sistemlerinin kütle atalet momentinin bulunması. UYGULAMALAR Şekilde gösterilen çark büyük bir kesiciye bağlıdır. Çarkın kütlesi, kesici bıçağa
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
STATİK. Ders_9. Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü. Ders notları için: GÜZ
 STATİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ ALANLAR İÇİN ATALET MOMENTİNİN TANIMI, ALAN ATALET YARIÇAPI
STATİK Ders_9 Doç.Dr. İbrahim Serkan MISIR DEÜ İnşaat Mühendisliği Bölümü Ders notları için: http://kisi.deu.edu.tr/serkan.misir/ 2017-2018 GÜZ ALANLAR İÇİN ATALET MOMENTİNİN TANIMI, ALAN ATALET YARIÇAPI
KirişlerdeİçKuvvetler Normal Kuvvet, KesmeKuvveti vemoment Diyagramları
 KirişlerdeİçKuvvetler Normal Kuvvet, KesmeKuvveti vemoment Diyagramları Kesme ve Moment Diyagramlarının Oluşturulması için Grafiksel Yöntem (Alan Yöntemi) Kiriş için işaret kabulleri (hatırlatma): Pozitif
KirişlerdeİçKuvvetler Normal Kuvvet, KesmeKuvveti vemoment Diyagramları Kesme ve Moment Diyagramlarının Oluşturulması için Grafiksel Yöntem (Alan Yöntemi) Kiriş için işaret kabulleri (hatırlatma): Pozitif
Karabük Üniversitesi, Mühendislik Fakültesi...www.IbrahimCayiroglu.com. STATİK (4. Hafta)
") KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
KAFES SİSTEMLER STATİK (4. Hafta) Düz eksenden oluşan çubukların birbiriyle birleştirilmesiyle elde edilen sistemlere kafes sistemler denir. Çubukların birleştiği noktalara düğüm noktaları adı verilir.
6. Sistemin toplam potansiyeli, rijitlik matrisi ve kurulması
 6 Sistemin toplam potansiyeli, rijitlik matrisi ve kurulması 6 Sistemin noktalarında süreklilik koşulu : Her elemanın düğüm noktası aynı zamanda sistemin de düğüm noktası olduğundan, sistemin noktaları
6 Sistemin toplam potansiyeli, rijitlik matrisi ve kurulması 6 Sistemin noktalarında süreklilik koşulu : Her elemanın düğüm noktası aynı zamanda sistemin de düğüm noktası olduğundan, sistemin noktaları
Kirişlerde İç Kuvvetler
 Kirişlerde İç Kuvvetler B noktasındaki iç kuvvetlerin bulunması B noktasındaki iç kuvvetler sol ve sağ parça İki boyutlu problemlerde eleman kesitinde üç farklı iç kuvvet oluşur! 2D 3D Pozitif normal/eksenel
Kirişlerde İç Kuvvetler B noktasındaki iç kuvvetlerin bulunması B noktasındaki iç kuvvetler sol ve sağ parça İki boyutlu problemlerde eleman kesitinde üç farklı iç kuvvet oluşur! 2D 3D Pozitif normal/eksenel
(, ) = + + yönünde yer değiştirme fonksiyonu
 = + + yönünde yer değiştirme fonksiyonu") . Üçgen levha eleman, düzlem gerilme durumu. Üçgen levha eleman, düzlem gerilme durumu Çok katlı yapılardaki deprem perdeleri ve yüksek kirişler düzlem levha gibi davranır. Sağdaki şekilde bir levha sistem
. Üçgen levha eleman, düzlem gerilme durumu. Üçgen levha eleman, düzlem gerilme durumu Çok katlı yapılardaki deprem perdeleri ve yüksek kirişler düzlem levha gibi davranır. Sağdaki şekilde bir levha sistem
Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984.
, 1984.") Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
Çankırı Karatekin Üniversitesi Matematik Bölümü 2015 Kaynaklar Shepley L. Ross, Differential Equations (3rd Edition), 1984. (Adi ) Bir ya da daha fazla bağımsız değişkenden oluşan bağımlı değişken ve türevlerini
r r r F İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine kuvvetini göstermektedir. Parçacık A noktasından
 İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
İŞ : Şekil yörüngesinde hareket eden bir parçacık üzerine etkiyenf r kuvvetini göstermektedir. Parçacık A noktasından r r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve d r A dan A ne
MAK4061 BİLGİSAYAR DESTEKLİ TASARIM
 MAK4061 BİLGİSAYAR DESTEKLİ TASARIM (Shell Mesh, Bearing Load,, Elastic Support, Tasarım Senaryosunda Link Value Kullanımı, Remote Load, Restraint/Reference Geometry) Shell Mesh ve Analiz: Kalınlığı az
MAK4061 BİLGİSAYAR DESTEKLİ TASARIM (Shell Mesh, Bearing Load,, Elastic Support, Tasarım Senaryosunda Link Value Kullanımı, Remote Load, Restraint/Reference Geometry) Shell Mesh ve Analiz: Kalınlığı az
Rijit Cisimlerin Dengesi
 Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
Rijit Cisimlerin Dengesi Rijit Cisimlerin Dengesi Bu bölümde, rijit cisim dengesinin temel kavramları ele alınacaktır: Rijit cisimler için denge denklemlerinin oluşturulması Rijit cisimler için serbest
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ
 BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
Yapısal Analiz Programı SAP2000 Bilgi Aktarımı ve Kullanımı. Doç.Dr. Bilge Doran
 Yapısal Analiz Programı SAP2000 Bilgi Aktarımı ve Kullanımı Dersin Adı : Yapı Mühendisliğinde Bilgisayar Uygulamaları Koordinatörü : Doç.Dr.Bilge DORAN Öğretim Üyeleri/Elemanları: Dr. Sema NOYAN ALACALI,
Yapısal Analiz Programı SAP2000 Bilgi Aktarımı ve Kullanımı Dersin Adı : Yapı Mühendisliğinde Bilgisayar Uygulamaları Koordinatörü : Doç.Dr.Bilge DORAN Öğretim Üyeleri/Elemanları: Dr. Sema NOYAN ALACALI,
34. Dörtgen plak örnek çözümleri
 34. Dörtgen plak örnek çözümleri Örnek 34.1: Teorik çözümü Timoshenko 1 tarafından verilen dört tarafından ankastre ve merkezinde P=100 kn tekil yükü olan kare plağın(şekil 34.1) çözümü 4 farklı model
34. Dörtgen plak örnek çözümleri Örnek 34.1: Teorik çözümü Timoshenko 1 tarafından verilen dört tarafından ankastre ve merkezinde P=100 kn tekil yükü olan kare plağın(şekil 34.1) çözümü 4 farklı model
İÇİNDEKİLER ÖNSÖZ Bölüm 1 SAYILAR 11 Bölüm 2 KÜMELER 31 Bölüm 3 FONKSİYONLAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 SAYILAR 11 1.1. Sayı Kümeleri 12 1.1.1.Doğal Sayılar Kümesi 12 1.1.2.Tam Sayılar Kümesi 13 1.1.3.Rasyonel Sayılar Kümesi 14 1.1.4. İrrasyonel Sayılar Kümesi 16 1.1.5. Gerçel
YTÜ Makine Mühendisliği Bölümü Mekanik Anabilim Dalı Özel Laboratuvar Dersi Strain Gauge Deneyi Çalışma Notu
 YTÜ Makine Mühendisliği Bölümü Mekanik Anabilim Dalı Özel Laboratuvar Dersi Strain Gauge Deneyi Çalışma Notu Laboratuar Yeri: B Blok en alt kat Mekanik Laboratuarı Laboratuar Adı: Strain Gauge Deneyi Konu:
YTÜ Makine Mühendisliği Bölümü Mekanik Anabilim Dalı Özel Laboratuvar Dersi Strain Gauge Deneyi Çalışma Notu Laboratuar Yeri: B Blok en alt kat Mekanik Laboratuarı Laboratuar Adı: Strain Gauge Deneyi Konu:
Şekilde görülen integralin hesaplanmasında, fonksiyonun her verilen bir noktası için kümülatif alan hesabı yapılır.
 NÜMERİK İNTEGRASYON Şekilde görülen integralin hesaplanmasında, onksiyonun her verilen bir noktası için kümülati alan hesabı yapılır. Nümerik integrasyonda, integralin analitik değerine, çeşitli yöntemlerle
NÜMERİK İNTEGRASYON Şekilde görülen integralin hesaplanmasında, onksiyonun her verilen bir noktası için kümülati alan hesabı yapılır. Nümerik integrasyonda, integralin analitik değerine, çeşitli yöntemlerle
SEM2015 programı kullanımı
 SEM2015 programı kullanımı Basit Kuvvet metodu kullanılarak yazılmış, öğretim amaçlı, basit bir sonlu elemanlar statik analiz programdır. Çözebileceği sistemler: Düzlem/uzay kafes: Evet Düzlem/uzay çerçeve:
SEM2015 programı kullanımı Basit Kuvvet metodu kullanılarak yazılmış, öğretim amaçlı, basit bir sonlu elemanlar statik analiz programdır. Çözebileceği sistemler: Düzlem/uzay kafes: Evet Düzlem/uzay çerçeve:
SOLIDWORKS SIMULATION EĞİTİMİ
 SOLIDWORKS SIMULATION EĞİTİMİ Kurs süresince SolidWorks Simulation programının işleyişinin yanında FEA teorisi hakkında bilgi verilecektir. Eğitim süresince CAD modelden başlayarak, matematik modelin oluşturulması,
SOLIDWORKS SIMULATION EĞİTİMİ Kurs süresince SolidWorks Simulation programının işleyişinin yanında FEA teorisi hakkında bilgi verilecektir. Eğitim süresince CAD modelden başlayarak, matematik modelin oluşturulması,
7. Kafes sistem sayısal örnekleri
 7. Kafes sistem sayısal örnekleri 7. Düzlem kafes sistem sayısal örneği Şekil 7. deki kafes sistem elastisite modülü.. 5 N/mm olan çelik borulardan imal edilmiştir. a noktasındaki kuvvetlerinden oluşan:
7. Kafes sistem sayısal örnekleri 7. Düzlem kafes sistem sayısal örneği Şekil 7. deki kafes sistem elastisite modülü.. 5 N/mm olan çelik borulardan imal edilmiştir. a noktasındaki kuvvetlerinden oluşan:
Kompozit Malzemeler ve Mekaniği. Yrd.Doç.Dr. Akın Ataş
 Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 2 Laminanın Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 2 Laminanın Makromekanik
Kompozit Malzemeler ve Mekaniği Yrd.Doç.Dr. Akın Ataş Bölüm 2 Laminanın Makromekanik Analizi Kaynak: Kompozit Malzeme Mekaniği, Autar K. Kaw, Çevirenler: B. Okutan Baba, R. Karakuzu. 2 Laminanın Makromekanik
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ
 BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
BİLGİSAYAR DESTEKLİ TASARIM HAFTA 6 COSMOSWORKS İLE ANALİZ Makine parçalarının ve/veya eş çalışan makine parçalarından oluşan mekanizma veya sistemlerin tasarımlarında önemli bir aşama olan ve tasarıma
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
MUKAVEMET DERSİ. (Temel Kavramlar) Prof. Dr. Berna KENDİRLİ
 Prof. Dr. Berna KENDİRLİ") MUKAVEMET DERSİ (Temel Kavramlar) Prof. Dr. Berna KENDİRLİ Ders Planı HAFTA KONU 1 Giriş, Mukavemetin tanımı ve genel ilkeleri 2 Mukavemetin temel kavramları 3-4 Normal kuvvet 5-6 Gerilme analizi 7 Şekil
MUKAVEMET DERSİ (Temel Kavramlar) Prof. Dr. Berna KENDİRLİ Ders Planı HAFTA KONU 1 Giriş, Mukavemetin tanımı ve genel ilkeleri 2 Mukavemetin temel kavramları 3-4 Normal kuvvet 5-6 Gerilme analizi 7 Şekil
EĞİLME. Köprünün tabyası onun eğilme gerilmesine karşı koyma dayanımı esas alınarak boyutlandırılır.
 EĞİLME Köprünün tabyası onun eğilme gerilmesine karşı koyma dayanımı esas alınarak boyutlandırılır. EĞİLME Mühendislikte en önemli yapı ve makine elemanları mil ve kirişlerdir. Bu bölümde, mil ve kirişlerde
EĞİLME Köprünün tabyası onun eğilme gerilmesine karşı koyma dayanımı esas alınarak boyutlandırılır. EĞİLME Mühendislikte en önemli yapı ve makine elemanları mil ve kirişlerdir. Bu bölümde, mil ve kirişlerde
Kafes Sistemler. Birbirlerine uç noktalarından bağlanmış çubuk elemanların oluşturduğu sistemlerdir.
 Kafes Sistemler Birbirlerine uç noktalarından bağlanmış çubuk elemanların oluşturduğu sistemlerdir. Kafes Sistemler Birçok uygulama alanları vardır. Çatı sistemlerinde, Köprülerde, Kulelerde, Ve benzeri
Kafes Sistemler Birbirlerine uç noktalarından bağlanmış çubuk elemanların oluşturduğu sistemlerdir. Kafes Sistemler Birçok uygulama alanları vardır. Çatı sistemlerinde, Köprülerde, Kulelerde, Ve benzeri
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ KAZANIM NO KAZANIMLAR
 2013-2014 PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 12 32173 Üslü İfadeler 2 13 42016 Rasyonel ifade kavramını örneklerle açıklar ve
2013-2014 PERGEL YAYINLARI LYS 1 DENEME-6 KONU ANALİZİ SORU NO LYS 1 MATEMATİK TESTİ A B KAZANIM NO KAZANIMLAR 1 1 / 31 12 32173 Üslü İfadeler 2 13 42016 Rasyonel ifade kavramını örneklerle açıklar ve
Bölüm 3. Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi
 Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
Bölüm 3 Tek Serbestlik Dereceli Sistemlerin Zorlanmamış Titreşimi Sönümsüz Titreşim: Tek serbestlik dereceli örnek sistem: Kütle-Yay (Yatay konum) Bir önceki bölümde anlatılan yöntemlerden herhangi biri
SONLU ELEMANLAR YÖNTEMİ
 SONLU ELEMANLAR YÖNTEMİ Kurs Kapsamı SONLU ELEMANLAR KAVRAMI SONLU ELEMANLAR FORMULASYONU UYGULAMALARI Sonlu Elemanlar Çözümleri Rijitlik Metodu Esneklik Metodu Karışık Kullanımlar Rijitlik Metodu Kullanılarak
SONLU ELEMANLAR YÖNTEMİ Kurs Kapsamı SONLU ELEMANLAR KAVRAMI SONLU ELEMANLAR FORMULASYONU UYGULAMALARI Sonlu Elemanlar Çözümleri Rijitlik Metodu Esneklik Metodu Karışık Kullanımlar Rijitlik Metodu Kullanılarak
Math 322 Diferensiyel Denklemler Ders Notları 2012
 1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
1 Genel Tanımlar Bir veya birden fazla fonksiyonun türevlerini içeren denklemlere diferensiyel denklem denmektedir. Diferensiyel denklemler Adi (Sıradan) diferensiyel denklemler ve Kısmi diferensiyel denklemler
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine kuvveti görülmektedir. Parçacık A noktasından
 İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İŞ : Şekilde yörüngesinde hareket eden bir parçacık üzerine etkiyen F kuvveti görülmektedir. Parçacık A noktasından r geçerken konum vektörü uygun bir O orijininden ölçülmektedir ve A dan A ne diferansiyel
İleri Diferansiyel Denklemler
 MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
MIT AçıkDersSistemi http://ocw.mit.edu 18.034 İleri Diferansiyel Denklemler 2009 Bahar Bu bilgilere atıfta bulunmak veya kullanım koşulları hakkında bilgi için http://ocw.mit.edu/terms web sitesini ziyaret
Kübik Spline lar/cubic Splines
 Kübik spline lar önceki metodların aksine bütün data noktalarına tek bir fonksiyon/eğri uydurmaz. Bunun yerine her çift nokta için ayrı ayrı üçüncü dereceden polinomlar uydurur. x i noktasından geçen soldaki
Kübik spline lar önceki metodların aksine bütün data noktalarına tek bir fonksiyon/eğri uydurmaz. Bunun yerine her çift nokta için ayrı ayrı üçüncü dereceden polinomlar uydurur. x i noktasından geçen soldaki
R d N 1 N 2 N 3 N 4 /2 /2
 . SÜREKLİ TEELLER. Giriş Kolon yüklerinin büyük ve iki kolonun birbirine yakın olmasından dolayı yapılacak tekil temellerin çakışması halinde veya arsa sınırındaki kolon için eksantrik yüklü tekil temel
. SÜREKLİ TEELLER. Giriş Kolon yüklerinin büyük ve iki kolonun birbirine yakın olmasından dolayı yapılacak tekil temellerin çakışması halinde veya arsa sınırındaki kolon için eksantrik yüklü tekil temel
Cismin Ağırlığı Düzlemsel Alanda Ağırlık Merkezi - İntegrasyon Yöntemi Örnekler Düzlemsel Eğride Ağırlık Merkezi - İntegrasyon Yöntemi
 4. 4. Cismin ğırlığı Düzlemsel landa ğırlık erkezi - İntegrasyon Yöntemi Düzlemsel Eğride ğırlık erkezi - İntegrasyon Yöntemi 4.3 Bileşik Plak ve Teller 4.4 Pappus Guldinus Teoremleri 4.5 Üç Boyutlu Cisimlerde
4. 4. Cismin ğırlığı Düzlemsel landa ğırlık erkezi - İntegrasyon Yöntemi Düzlemsel Eğride ğırlık erkezi - İntegrasyon Yöntemi 4.3 Bileşik Plak ve Teller 4.4 Pappus Guldinus Teoremleri 4.5 Üç Boyutlu Cisimlerde
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 4 Kuvvet Sistemi Bileşkeleri Kaynak: Mühendislik Mekaniği: Statik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 4. Kuvvet Sitemi Bileşkeleri
BURULMA (TORSİON) Dairesel Kesitli Çubukların (Millerin) Burulması MUKAVEMET - Ders Notları - Prof.Dr. Mehmet Zor
 Dairesel Kesitli Çubukların (Millerin) Burulması MUKAVEMET - Ders Notları - Prof.Dr. Mehmet Zor") 3 BURULMA (TORSİON) Dairesel Kesitli Çubukların (Millerin) Burulması 1.1.018 MUKAVEMET - Ders Notları - Prof.Dr. Mehmet Zor 1 3. Burulma Genel Bilgiler Burulma (Torsion): Dairesel Kesitli Millerde Gerilme
3 BURULMA (TORSİON) Dairesel Kesitli Çubukların (Millerin) Burulması 1.1.018 MUKAVEMET - Ders Notları - Prof.Dr. Mehmet Zor 1 3. Burulma Genel Bilgiler Burulma (Torsion): Dairesel Kesitli Millerde Gerilme
BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER
 BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER b) İkinci süreç eğik atış hareketine karşılık geliyor. Orada örendiğin problem çözüm adımlarını kullanarak topun sopadan ayrıldığı andaki hızını bağıntı olarak
BÖLÜM 9 ÇÖZÜLMESİ ÖNERİLEN ÖRNEK VE PROBLEMLER b) İkinci süreç eğik atış hareketine karşılık geliyor. Orada örendiğin problem çözüm adımlarını kullanarak topun sopadan ayrıldığı andaki hızını bağıntı olarak
İÇİNDEKİLER ÖNSÖZ Bölüm 1 KÜMELER Bölüm 2 SAYILAR
 İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
İÇİNDEKİLER ÖNSÖZ III Bölüm 1 KÜMELER 11 1.1. Küme 12 1.2. Kümelerin Gösterimi 13 1.3. Boş Küme 13 1.4. Denk Küme 13 1.5. Eşit Kümeler 13 1.6. Alt Küme 13 1.7. Alt Küme Sayısı 14 1.8. Öz Alt Küme 16 1.9.
DİNAMİK - 7. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
DİNAMİK - 7 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü 7. HAFTA Kapsam: Parçacık Kinetiği, Kuvvet İvme Yöntemi Newton hareket
Kirişlerde Kesme (Transverse Shear)
") Kirişlerde Kesme (Transverse Shear) Bu bölümde, doğrusal, prizmatik, homojen ve lineer elastik davranan bir elemanın eksenine dik doğrultuda yüklerin etkimesi durumunda en kesitinde oluşan kesme gerilmeleri
Kirişlerde Kesme (Transverse Shear) Bu bölümde, doğrusal, prizmatik, homojen ve lineer elastik davranan bir elemanın eksenine dik doğrultuda yüklerin etkimesi durumunda en kesitinde oluşan kesme gerilmeleri
Elastisite Teorisi Hooke Yasası Normal Gerilme-Şekil değiştirme
 Elastisite Teorisi Hooke Yasası Normal Gerilme-Şekil değiştirme Gerilme ve Şekil değiştirme bileşenlerinin lineer ilişkileri Hooke Yasası olarak bilinir. Elastisite Modülü (Young Modülü) Tek boyutlu Hooke
Elastisite Teorisi Hooke Yasası Normal Gerilme-Şekil değiştirme Gerilme ve Şekil değiştirme bileşenlerinin lineer ilişkileri Hooke Yasası olarak bilinir. Elastisite Modülü (Young Modülü) Tek boyutlu Hooke