T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
|
|
|
- Aydin Özkök
- 8 yıl önce
- İzleme sayısı:
Transkript
1 T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ GENEL AMAÇLI UZAKTAN KUMANDA MODÜLÜNÜN TASARIMI VE GERÇEKLEŞTİRİLMESİ Danışman Yrd. Doç. Dr. Murat UZAM Hazırlayan Kurtuluş TÜFEKÇİ HAZİRAN 2003 NİĞDE

2 Niğde Üniversitesi, Mühendislik-Mimarlık Fakültesi, Elektrik-Elektronik Mühendisliği Bölümünde Bitirme Ödevi kapsamında yapılan bu çalışma tarafımdan yönetilmiş ve Bitirme Tezi olarak kabul edilmiştir..../... / 2003 Yrd. Doç. Dr. Murat UZAM Danışman Bu çalışmanın Niğde Üniversitesi, Mühendislik-Mimarlık Fakültesi, Elektrik- Elektronik Mühendisliği Bölümünde Bitirme Tezi olarak kabul edildiğini onaylarım.... /... / 2003 Doç. Dr. Saadetdin HERDEM Bölüm Başkanı

3 TEŞEKKÜR Bu Bitirme Tezi çalışmasının yürütülmesinde yardımlarını esirgemeyen danışman hocam Yrd. Doç. Dr. Murat UZAM a teşekkürü bir borç bilirim. Eğitimimde emeği geçen hocalarım Doç. Dr. Saadetdin HERDEM e, Doç. Dr. Adnan GÖRÜR e, Doç. Dr. Tankut YALÇINÖZ e Yrd. Doç. Dr. Murat UZAM a, Yrd. Doç. Dr. Halis ALTUN a, Yrd. Doç. Dr. Bekir Sami TEZEKİCİ ye, Öğr. Gör. Dr. Saffet AYASUN a ve Öğr. Gör. İbrahim YÜCEL e teşekkürü bir borç bilirim. Ayrıca gerçekleştirilen modülünün tasarım aşamasında ve motivasyon olarak katkılarından dolayı başta Arş. Gör. M. Kürşat YALÇIN olmak üzere Arş. Gör. Ulaş EMİNOĞLU na, Arş. Gör. Mustafa AKPINAR a, Arş Gör. İ. Burak KOÇ a ve tüm okul arkadaşlarıma teşekkürü bir borç bilirim. Maddi ve manevi desteğim ve yaşam kaynağım babam ve annem Emin-Neriman TÜFEKÇİ ye, kardeşlerim Esin SAKARYA ya ve Engin TÜFEKÇİ ye teşekkürü bir şükran borcu bilirim. Elk. Elektronik Mühendisliği bölümünü seçmemde etkili olan ve eğitimim aşamasında maddi ve manevi desteğini esirgemeyen Polatlı/ANKARA işadamlarından Birol TÜRKYAMAN a ve eşi halam Lütfiye TÜRKYAMAN a teşekkürü bir şükran borcu bilirim. Kötü günümde ve iyi günümde sürekli yanımda olan değerli dostum Murat KESER e teşekkürü boynumun borcu bilirim. Bu Bitirme tezi çalışmasını rahmetli dedem Nurettin ÖZDEMİR in anısına ithaf ederim.

4 ÖZET Günümüz teknolojisinde endüstride kullanılan sistemlerdeki ekipmanların kontrol edilmesi ve ekipmanlardan gelen bilgilerin alınarak bu doğrultuda karar verilmesi önemli bir yer tutmaktadır. Bu çalışmada bir uzaktan kumanda cihazı yardımıyla 8 adet rölenin ve 8 adet triyakın anahtarlanması ve 1 adet triyakın dimmer olarak kontrol edilmesi gerçekleştirilmiştir. Uzaktan kumanda cihazı olarak Creative firmasının CD-ROM sürücüleri için ürettiği bir uzaktan kumanda modülü, sistemi kontrol etmek için ise bir PIC16F877 ve bir PIC16F84 mikrodenetleyicisi kullanılmıştır.

5 İÇİNDEKİLER ÖZET...iii TEŞEKKÜR...iv İÇİNDEKİLER...v-vi ŞEKİLLER DİZİNİ...vii-viii BÖLÜM I GİRİŞ...1 BÖLÜM II MİKRODENETLEYİCİLER (PIC16F877 VE PIC16F84) Mikrodenetleyiciler PIC Mikrodenetleyicisi PIC Mikrodenetleyicisinin Tercih Nedenleri PIC16F84 Mikrodenetleyicisi PIC16F84 Portlarının Fonksiyonları Port A Port B PIC16F84 ün RAM Belleği PIC16F84 ün Besleme Uçları ve Beslemesi PIC16F84 ün Reset Uçları PIC16F84 ün Clock Uçları ve Osilatör Tipleri PIC16F877 Mikrodenetleyicisi PIC16F877 Portlarının Fonksiyonları Port A Port B Port C Port D Port E PIC16F877 nin RAM Belleği PIC16F877 nin Besleme Uçları ve Beslemesi PIC16F877 nin Reset Uçları PIC16F877 nin Clock Uçları ve Osilatör Tipleri PIC Mikrodenetleyicisinde Komut Seti ve Program Yazımı PIC Mikrodenetleyicisine Programın Aktarılması...15 BÖLÜM III KIZILÖTESİ UZAKTAN KUMANDA...18

6 BÖLÜM IV GERÇEKLEŞTİRİLEN MODÜLÜN DEVRE DONANIMI VE YAZILIMI Gerçekleştirilen Modül Donanımı Güç Kaynağı ve sıfır Geçiş Algılayıcı Devrei Uzaktan Kumanda Alıcı Devresi Display Sürücü Devresi Kontrol Devresi Röle Sürücü Devresi Optokuplör ve Triyaklı Sürücü Devresi Optokuplör ve Triyaklı Dimmer Devresi Gerçekleştirilen Modül Yazılımı PIC16F877 Mikrodenetleyici Yazılımı PIC16F84 Mikrodenetleyici Yazılımı Gerçekleştirilen Modül Çalışması...30 BÖLÜM V SONUÇ...31 EK 1 PIC16F877 Mikrodenetleyici Programı...32 EK 2 PIC16F84 Mikrodenetleyici Programı...44 EK 3 Gerçekleştirilen Modüle Ait Devre Fotografları...52 KAYNAKLAR...56

7 ŞEKİLLER DİZİNİ Şekil 1.1. Gerçekleştirilen modülün blok şeması...2 Şekil 2.1. Bir mikrodenetleyicili sisteme ait blok şeması...4 Şekil 2.2. PIC16F84 mikrodenetleyicisinin entegre kılıf yapısı...7 Şekil 2.3. PIC16F84 ün kullanıcı RAM bellek haritası...9 Şekil 2.4. PIC16F877 mikrodenetleyicisinin entegre kılıf yapısı...10 Şekil 2.5. PIC16F877 nin kullanıcı RAM bellek haritası...13 Şekil 2.6. MPASM derleyici programı şekli...15 Şekil 2.7. IC-PROG programı ilk defa çalıştırıldığında ekran görüntüsü...16 Şekil 2.8. ICPROG programının ekran görüntüsü...16 Şekil 2.9. PIC16F877 yi ve PIC16F84 ü programlamak için gereken devre...17 Şekil 3.1. Genel bir kızılötesi kumandanın blok şeması...18 Şekil 3.2 (a) 010 bilgisine karşılık gelen NRZ veri kodu (b) 010 bilgisine karşılık gelen darbe genişlik modülasyon kodu...19 Şekil 3.3. Darbe genişlik modülasyonu kodlamasından sonra darbe kod modülasyonu...20 Şekil 3.4. Çerçeve ayrımı...20 Şekil 3.5. Uzaktan kumanda üzerindeki tuşlara karşılık gelen sayılar...22 Şekil 3.6. Uzaktan kumanda da bulunan tuşların 32 bitlik karşılıkları...22 Şekil 3.7. İki adet veri çerçevesinin ardından tekrar çerçevelerinin gönderilmesi...23 Şekil 3.8. TSOP1238 foto modülü ve blok şeması...24 Şekil 3.9. TSOP1238 foto modülünün giriş ve çıkış ilişkisi...24 Şekil 4.1. Üç Çıkışlı Transformatör...25 Şekil 4.2. Sıfır geçiş algılayıcısı giriş/çıkış grafiği...26 Şekil 4.3. Güç kaynağı ve Sıfır geçiş algılayıcı devresi...26 Şekil 4.4. Uzaktan kumanda algılayıcı devresi...27 Şekil 4.5. Display sürücü devresi...27

8 Şekil 4.6. Gerçekleştirilen modülün konrol devresi genel olarak...28 Şekil 4.7. Röle sürücü devresi...28 Şekil 4.8. Optokuplör ve Triyaklı sürücü devresi...29 Şekil Ek-3.1. Gerçekleştirilen modülün ana kontrol kartı üstten görünüşü...52 Şekil Ek-3.2. Gerçekleştirilen modülün ana kontrol kartı alttan görünüşü...53 Şekil Ek-3.3. Gerçekleştirilen modülün ana kontrol kartı yandan görünüşü...53 Şekil Ek-3.4. Gerçekleştirilen modulün güç kaynağı kartı üsten görünüşü...54 Şekil Ek-3.5. Gerçekleştirilen modülün güç kaynağı kartı alttan görünüşü...54 Şekil Ek-3.6. Gerçekleştirilen modülün display ve uzaktan kumanda algılayıcı kartı üstten görünüşü...54 Şekil Ek-3.7. Gerçekleştirilen modülün display ve uzaktan kumanda algılayıcı kartı alttan görünüşü...55 Şekil Ek-3.8. Gerçekleştirilen modülün son halinin üstten görünüşü...55

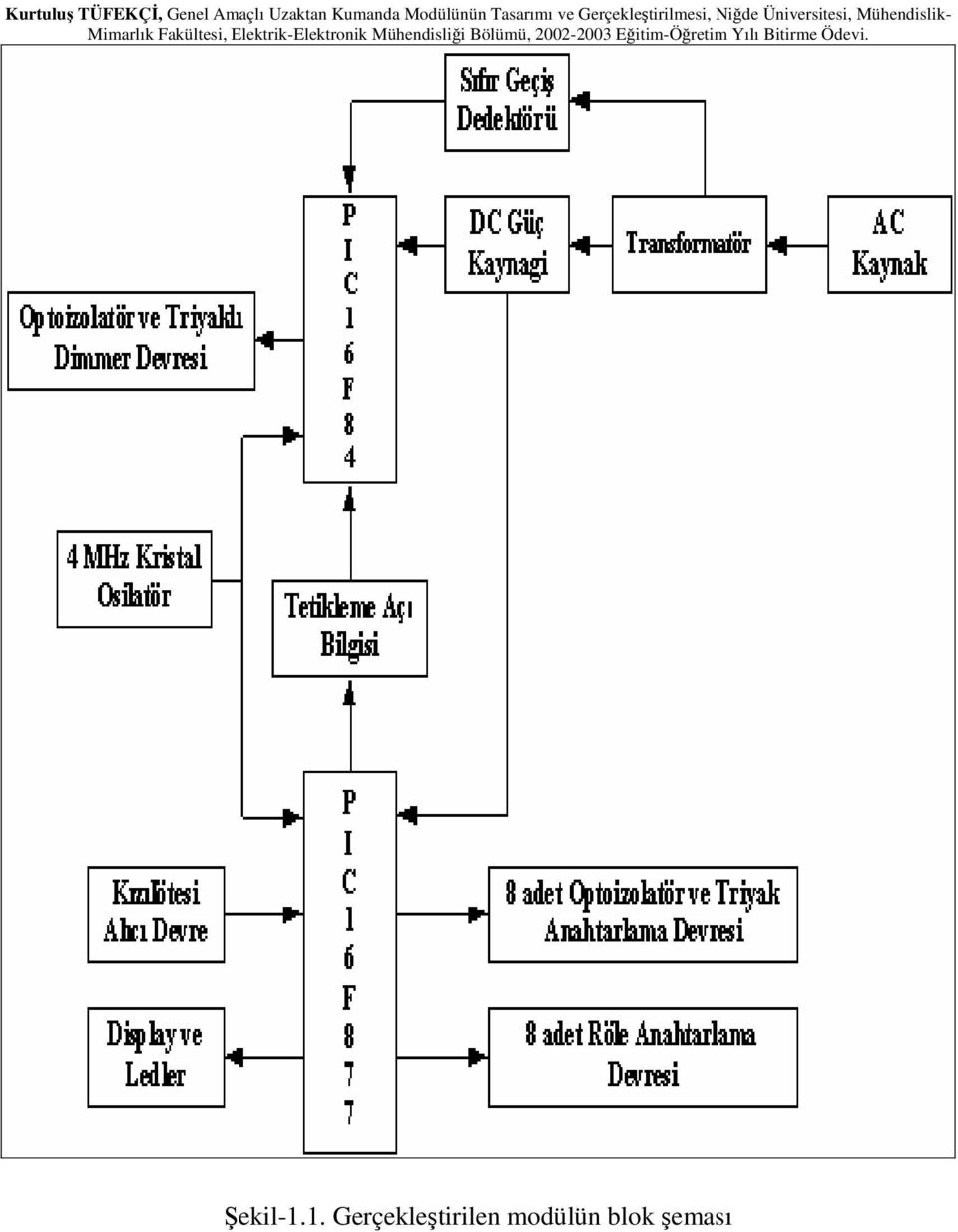
9 BÖLÜM - I GİRİŞ Bu bitirme tezi çalışmasının amacı kızılötesi uzaktan kumanda ile genel amaçlı uzaktan kumanda modülünün tasarımı ve gerçekleştirilmesidir. Gerçekleştirilen modül; ev, işyeri ve laboratuarlarda devre üzerinde kullanılan 8 adet rölenin ve 8 adet triyakın anahtarlaması ile sistemlerin kontrol edilmesi ve 1 adet triyaklı dimmer devresi ile ışık şiddetini uzaktan kontrol edilebilecek şekilde tasarlanmıştır. Gerçekleştirilen modülde kızılötesi uzaktan kumanda vericisi olarak Creative firmasının ürettiği CD-ROM cihazlarında kullanılan infrared uzaktan kumanda cihazı kullanılmıştır. Modülü kontrol etmek amacıyla Microchip firmasının ürettiği PIC16F877 ve PIC16F84 mikrodenetleyicileri kullanılmıştır. PIC16F877 mikrodenetleyicisi ile uzaktan kumandadan gelen sinyalin kodunun çözülmesi, 8 adet röle ve 8 adet triyakın anahtarlama devrelerinin sürülmesi ve PIC16F84 mikrodenetleyicisine dimmer devresinin tetikleme açısı (Işık şiddeti bilgisi) gönderilmektedir. PIC16F84 mikrodenetleyicisi ile PIC16F877 mikrodenetleyicisinden gelen tetikleme açısının (Işık şiddeti bilgisinin) alınması, sıfır geçiş algılayıcıdan gelen bilginin alınması ve 1 adet triyaklı dimmer devresinin sürülmesi gerçekleştirilmektedir. Gerçekleştirilen modülün çalışması bir blok şemayla Şekil 1.1 de verilmektedir. Bu bitirme tezi çalışmasının ikinci bölümünde kullanılan PIC16F877 ve PIC16F84 mikrodenetleyicilerinin özellikleri ve programın mikrodenetleyicilere yüklenmesinden bahsedilmektedir. Üçüncü bölümde ise kızılötesi (IR) alıcı ve verici kumandasından ve vericiden gelen kodun sistematik olarak çözülmesinden bahsedilmektedir. Dördüncü bölümde ise gerçekleştirilen modülün devre donanımları ve yazılımlarından bahsedilmektedir. Beşinci bölümde ise sonuç verilmiştir.

10 Şekil-1.1. Gerçekleştirilen modülün blok şeması
11 2.1. Mikrodenetleyiciler BÖLÜM - II MİKRODENETLEYİCİLER ( PIC16F877 VE PIC16F84 ) Mikrodenetleyicilerde, mikroişlemcilerin çalışması için gereken çevre elemanları (RAM, EEPROM, Portlar vs) tek bir entegre içerisinde bulundurulur. Bir mikrodenetleyici küçük boyutlu, düşük güç tüketimli, ucuz bir mikroişlemci ile yeterli derecede sinyal işleyebilen ayrık devrelerin birleşiminden oluşur. Bir mikrodenetleyici karmaşık lojik fonksiyonları tek bir entegrede toplayıp sunan bir cihazdır denilebilir. Mikrodenetleyicilerde klasik mikroişlemcili sistemlerden farklı olarak program belleği, RAM, I/O ve CPU bir aradadır. Bir mikrodenetleyici kabaca, bilgisayar içerisinde bulunması gereken temel bileşenlerden RAM, I/O gibi bileşenleri içerisinde barındıran tek bir chip mahiyetindedir. Böyle olunca bilgisayar kontrolü gerektiren elektronik uygulamalarda mikrodenetleyici kullanma eğilimi artmaktadır. Çünkü bir mikroişlemci ile kontrol edilecek bir sistemi kurmak için, CPU, RAM, I/O ve bu birimler arasındaki veri alış-verişini sağlayacak baskılı devreyi kurmak gerekmektedir. Oysa aynı iş için bir mikrodenetleyici ve küçük bir devre kartı kullanmak yeterli olmaktadır. Bu da maliyet ve kolaylık anlamında mikrodenetleyicinin seçiminde etkili olmaktadır. Günümüzde mikrodenetleyiciler kameralarda, otomobillerde, fax cihazlarında, fotokopi, radyo, cep telefonları, tv, bazı oyuncaklar ve daha bir çok bilgisayar teknolojisi gerektiren alanlarda kullanılmaktadır. Şekil 2.1 de bir mikrodenetleyicili bir sisteme ait blok şeması verilmiştir. Çeşitli firmalar tarafından üretilmiş birbirinden farklı mikrodenetleyiciler bulunmaktadır. Bunlar arasında yapısal olarak küçük farklar olmasına karşın genel olarak aynı işi gerçekleştirmektedirler. Bir mikrodenetleyicinin seçiminde hangi özelliklerin olması isteniyor ise önceden bunların tespit edilmesi gerekir. Bu özellikler; Programlanabilir dijital paralel giriş/çıkışı Programlanabilir analog giriş/çıkışı Seri giriş/çıkışı Motor veya servo kontrol için pals sinyali çıkışı Harici giriş vasıtasıyla kesme

12 Timer vasıtasıyla kesme Harici bellek arabirimi Harici bus arabirimi Dahili bellek tipi seçenekleri Dahili RAM seçeneği Kayan nokta hesaplaması şeklinde sıralanabilir. Şekil-2.1. Bir mikrodenetleyicili sisteme ait blok şeması PIC Mikrodenetleyicisi PIC serisi mikrodenetleyiciler Microchip firması ( tarafından geliştirilmiştir; ve üretim amaçları, çok fonksiyonlu lojik uygulamalarının hızlı ve ucuz bir mikrodenetleyici ile kolay bir yazılım yoluyla karşılanmasıdır. PIC in kelime anlamı Peripheral Interface controller (Çevresel birimleri denetleyici) dir. İlk olarak 1994 yılında 16 bitlik ve 32 bitlik büyük işlemcilerin giriş ve çıkışlarındaki yükü azaltmak ve denetlemek amacıyla çok hızlı ve ucuz bir çözüme ihtiyaç duyulduğu için geliştirilmiştir. Çok geniş bir ürün ailesinin ilk üyesi olan PIC16C54 bu ihtiyacın ilk ürünüdür. PIC işlemcileri RISC benzeri işlemciler olarak anılmaktadır. PIC16C54 12 Bit komut hafıza genişliği olan 8 bitlik CMOS bir işlemcidir. 18 bacaklı dip kılıfta 13 I/O bacağına sahiptir ve 20 Mhz osilatör hızına kadar kullanılabilir. 33 adet genel komut içermektedir. 512 byte program epromu ve 25 byte RAM`i bulunmaktadır. Bu hafıza kapasitesi birçok insanı güldürmüştür ama bir RISC işlemci olması birçok işin bu kapasitede uygulanmasına olanak vermektedir. PIC serisi tüm işlemciler herhangi bir ek bellek veya giriş/çıkış elemanı gerektirmeden sadece 2 adet kondansatör, 1 adet direnç ve bir kristal ile çalıştırılabilmektedir. Tek
 dir.")
13 bacaktan 25 ma akım çekilebilmektedir ve entegre toplam olarak 150 ma akım akıtma kapasitesine sahiptir. Entegrenin 4 Mhz osilator frekansında çektiği akım çalışırken 2 ma stand-by durumunda ise 40µA kadardır. Interrupt kapasitesi ilk işlemci ailesi olan 12 bit core PIC16C5X ailesinde bulunmamaktadır. Daha sonra üretilen ve orta sınıf olarak tanınan 14 bit core- PIC16CXX ailesi birçok açıdan daha yetenekli bir grup işlemcidir. Bu ailenin temel özelliği interrupt kapasitesi ve 14 bitlik komut işleme hafızasıdır. Bu özellikler PIC i gerçek bir işlemci olmaya ve karmaşık işlemlerde kullanılmaya yatkın hale getirmiştir. PIC16CXX ailesi en geniş ürün yelpazesine sahip ailedir. PIC16CXX ailesinin en önemli özellikleri seri olarak devre üstünde (ICSP) dahi programlanmasıdır. PIC 16CXX ailesi amatör elektronikçiler arasında en çok bilinen işlemci ailesidir ve dünyada üzerinde pek çok proje üretilmiştir. İnternet in gözdesi olan bireyi PIC16C84 veya yeni adıyla PIC16F84 dür. PIC 16F84 ün bu kadar popüler olması onun çok iyi bir işlemci olmasından ziyade program belleğinin EEPROM (Elektrikle silinip yazılabilen bellek) olmasından kaynaklanmaktadır. Seri olarak dört adet kabloyla programlanması da diğer önemli avantajıdır. Bugüne kadar amatörce bir işlemciyle uğraşmış herkesin en büyük sıkıntısı EPROM veya EPROM tabanlı işlemcileri programladıktan sonra UltraViole ışık kaynağı ile silip tekrar programlamaktır. Bu çok zahmetli ve bir amatör için ekipman gerektiren yöntem olmuştur. PIC mikrodenetleyicileri ile çevresel üniteler adı verilen lamba, motor, röle, ısı ve ışık sensörü gibi I/O elemanlarının kontrolü yapılabilmektedir. Bunun yanında bir PIC i programlamak için kullanılacak olan komutlar oldukça basit ve sayı olarak da azdır PIC Mikrodenetleyicisinin Tercih Nedenleri PIC mikrodenetleyicilerinin tercih nedenleri; Maliyetinin oldukça ucuz olması Yüksek frekanslarda çalışabilmesi Standby durumunda çok düşük akım çekmesi Aynı anda birçok işlemi kod sıkıştırma özelliği sayesinde yapabilmesi Yazılımın internetten ücretsiz temin edilebilmesi Çok az donanıma ihtiyaç duyması

14 Kullanıcı kesiminin fazla olması PIC e göre diğer mikrodenetleyicilerde veriyi taşıyan bir tek bus bulunması, dolayısıyla diğer mikrodenetleyicilerden iki kat daha hızlı olması İnterrupt kapasitesi ve 14 bit komut işleme hafızasına sahip olması şeklinde sıralanabilirler. Ayrıca bunun yanında birçok PIC mikrodenetleyicisinin program belleği FLASH teknolojisi ile üretilmektedir. FLASH MEMORY teknolojisi ile üretilen bir belleğe yüklenen program entegreye uygulanan enerji kesilse dahi silinmemektedir. Yine istenirse bu tip bir bellekteki eski program silinip yeniden program yazılabilmektedir. FLASH bellekler bu özelliği gereği EEPROM ile aynı görünmektedir. Bazı üreticiler EEPROM belleğe FLASHROM da demektedirler. Bu özellik kullanıcı açısından çok büyük kolaylıklar sağlamaktadır. Böylece programlamaya yeni başlayanlar yaptığı hatalardan dolayı entegreyi atmak zorunda kalmamaktadırlar. PIC programlamak için gerekli olan donanım ve yazılımlar aşağıdaki şekilde sıralanabilir. IBM uyumlu bir bilgisayara sahip olmak ve temel kullanımlarını bilmek. Bir metin editörü kullanmasını bilmek.(ms-dos Metin Editörü) PIC assembler derleyicisine sahip olmak. (MPASM) PIC programlayıcı donanımına sahip olmak. (JDM Programmer gibi) PIC programlayıcı yazılımına sahip olmak. (IC-PROG gibi) 2.3. PIC16F84 Mikrodenetleyicisi CMOS teknolojisi ile üretilmiş olan PIC16F84 mikrodenetleyicisi çok az enerji harcamaktadır. Flash belleğe sahip olması nedeniyle clock girişine uygulanan sinyal kesildiğinde registerler içerisindeki veri aynen kalır. Clock sinyali tekrar verildiğinde PIC içerindeki program kaldığı yerden itibaren çalışmaya başlar. RA0-RA3 pinleri ve RB0- RB7 pinleri I/O portlarıdır. Bu portlardan girilen dijital sinyaller vasıtasıyla PIC içerinde çalışan programa veri girilmiş olur. Program, verileri değerlendirerek portları kullanmak suretiyle dış ortama dijital sinyaller gönderir. Şekil 2.2 de PIC16F84 ün entegre kılıf yapısı verilmiştir.

15 Şekil 2.2. PIC16F84 mikrodenetleyicisinin entegre kılıf yapısı PIC16F84 Portlarının Fonksiyonları Port A : Her bir biti bağımsız olarak giriş veya çıkış olarak tanımlanabilmektedir. 5 bit genişliğindedir. İlgili registerler ve adresleri aşağıdaki gibidir. PORTA TRISA 0x05h 0x85h; giriş / çıkış belirleme registeri Port B : Her bir biti bağımsız olarak sayısal giriş veya çıkış olarak tanımlanabilmektedir. 8 bit genişliğindedir. B portunun her bacağı dahili bir dirençle V DD ye bağlıdır (weak pull-up). Bu özellik varsayılan olarak etkin değildir. Ancak OPTION registerinin 7. bitini 0 yaparak B portunun bu özelliğini etkinleştirilebilir. RB4-RB7 bacakları aynı zamanda bacakların sayısal durumlarında bir değişiklik olduğunda INTCON registerinin 0 biti olan RBIF bayrağını 1 yaparak kesme oluşturmaktadır. Bu özellik, işlemci SLEEP konumundayken, devreye bağlı tuş takımının her hangi bir tuşuna basıldığında işlemcinin yeniden etkinleşmesi için kullanılabilir. Bütün bunların yanı sıra RB6 ve RB7 yüksek gerilim programlama, RB3 ise düşük gerilim programlama modlarında da kullanılmaktadır. İlgili registerler ve adresleri aşağıdaki gibidir.

16 PORTB 0x06h TRISB 0x86h; giriş / çıkış belirleme registeri OPTION_REG 0x81h PIC16F84 ün RAM Belleği PIC16F84 nin 0x00h-0x4Fh adres aralığına ayrılmış olan RAM belleği vardır. Bu bellek içerisindeki file registerlerin içerisine yerleştirilen veriler PIC CPU sunun çalışmasını kontrol etmektedir. File registerlerin bellek uzunluğu 8 bit tir. Sadece PCLATCH registeri 5 bit uzunluğundadır. File register adı verilen özel veri alanlarının dışında kalan diğer bellek alanları, normal RAM bellek olarak kullanılırlar. Yani bu alanlar program içerisindeki değişkenler için kullanılır. Şekil 2.3 te PIC16F84 ün kullanıcı RAM bellek haritası görülmektedir PIC16F84 ün Besleme Uçları ve Beslemesi PIC16F84 ün besleme gerilimi 14 ve 5 numaralı pinlerden uygulanmaktadır. 14 numaralı Vdd ucu +5V a ve 5 numaralı Vss ucu toprağa bağlanır. PIC e ilk defa enerji verildiği anda meydana gelebilecek gerilim dalgalanmaları nedeniyle, oluşabilecek istenmeyen arızaları önlemek amacıyla 100nF lık dekuplaj kondansatörünün devreye bağlanması gerekmektedir. PIC ler CMOS teknolojisi ile üretildiklerinden 2 ila 6 volt arasında çalışabilmektedirler. +5 V luk bir gerilim ise ideal bir değer olmaktadır PIC16F84 nin Reset Uçları Kullanıcının programı kasti olarak kesip başlangıca döndürebilmesi için PIC in 4 numaralı pini MCLR olarak kullanılmaktadır. MCLR ucuna 0 Volt uygulandığında programın çalışması başlangıç adresine döner. Programın ilk başlangıç adresinden itibaren tekrar çalışabilmesi için, aynı uca +5V gerilim uygulanmalıdır PIC16F84 ün Clock Uçları ve Osilatör Tipleri PIC16CXX mikrodenetleyicilerinde 4 çeşit osilatör bulunmaktadır. 1. RC Osilatör 2. LP ( Kristal kontrollü ) Osilatör 3. XT ( Kristal ve kondansatörlü ) Osilatör 4. HS (Seramik resonatör) Osilatör

17 Kullanıcı bu 4 çeşitten birini seçerek iki konfigürasyon bitini (FOSC1 ve FOSC2) programlayabilir. PIC16F84 de clock uçları 16 ve 15 numaralı pinlerdir. Hazırlanacak olan PIC programlarında kullanılan osilatör tipi PIC programının çalışma hızını ve hassasiyetini etkileyeceğinden dolayı amaca uygun bir osilatör devresi kullanılmalıdır. Osilatör tipinin seçiminde dikkat edilecek bir başka nokta ise, seçilecek olan osilatörün kullanılan PIC in özelliğine uygun olarak seçilmesidir. Örnek verecek olursak 4 MHz çalışma frekansına sahip bir PIC16F877 için 10 MHz lik bir osilatör kullanmak doğru olmaz. Fakat daha düşük bir frekans değeri ile çalışan bir osilatör devresi kullanılabilir. Şekil 2.3. PIC16F84 ün kullanıcı RAM bellek haritası

18 2.4. PIC16F877 Mikrodenetleyicisi PIC16F877, belki en popüler PIC işlemcisi olan PIC16F84 ten sonra kullanıcılarına yeni ve gelişmiş olanaklar sunmasıyla hemen göze çarpmaktadır. Program belleği FLASH ROM olan PIC16F877 de, yüklenen program PIC16F84 te olduğu gibi elektriksel olarak silinip yeniden yüklenebilmektedir. Şekil 2.4 de PIC16F877 mikrodenetleyicisinin entegre kılıf yapısı verilmiştir. Özellikle PIC16C6X ve PIC16C7X ailesinin tüm özelliklerini barındırması, PIC16F877 yi kod geliştirmede de ideal bir çözüm olarak gündeme getirmektedir. Konfigürasyon bitlerine dikkat etmek şartıyla PIC16C6X veya PIC16C7X ailesinden herhangi bir işlemci için geliştirilen kod hemen hiçbir değişikliğe tabi tutulmadan PIC16F877 e yüklenebilir ve çalışmalarda denenebilir. Bunun yanı sıra PIC16F877, PIC16C74 ve PIC16C77 işlemcileriyle de bire bir bacak uyumludur. Şekil 2.4. PIC16F877 mikrodenetleyicisinin entegre kılıf yapısı

19 PIC16F877 Portlarının Fonksiyonları Port A : Her bir biti bağımsız olarak giriş veya çıkış olarak tanımlanabilmektedir. 6 bit genişliğindedir (PIC16F84 te 5 bittir). RA0, RA1, RA2, RA3, RA4 ve RA5 bitleri analog/sayısal çevirici olarak konfigüre edilebilmektedir. Buna ek olarak RA2 ve RA3 gerilim referansı olarak da konfigüre edilebilmektedir (Bu durumda bu bitler aynı anda A/D çevirici olarak kullanılamamaktadır). İlgili registerler ve adresleri aşağıdaki gibidir. PORTA TRISA ADCON1 0x05h 0x85h ; giriş / çıkış belirleme registeri 0x9Fh ; RA portlarının A/D, referans gerilimi veya sayısal giriş/çıkış olarak seçiminde kullanılmaktadır. İşlemciye ilk defa gerilim uygulandığında RA4 hariç diğer beş PORTA biti A/D çeviricidir. Eğer RA portunun bazı bitlerini sayısal giriş/çıkış olarak kullanmak istersek ADCON1 registerinde değişiklik yapmamız gerekmektedir Port B : Her bir biti bağımsız olarak sayısal giriş veya çıkış olarak tanımlanabilmektedir. 8 bit genişliğindedir. B portunun her bacağı dahili bir dirençle V DD ye bağlıdır (weak pull-up). Bu özellik varsayılan olarak etkin değildir. Ancak OPTION registerinin 7. biti 0 yapılarak B portunun bu özelliği etkinleştirilebilir. RB4-RB7 bacakları aynı zamanda bacakların sayısal durumlarında bir değişiklik olduğunda INTCON registerinin 0. biti olan RBIF bayrağını 1 yaparak kesme oluşturmaktadır. Bu özellik, işlemci SLEEP konumundayken, devreye bağlı tuş takımının her hangi bir tuşuna basıldığında işlemcinin yeniden etkinleşmesi için kullanılabilir. Bütün bunların yanı sıra RB6 ve RB7 yüksek gerilim programlama, RB3 ise düşük gerilim programlama modlarında da kullanılmaktadır. İlgili registerler ve adresleri aşağıdaki gibidir. PORTB TRISB OPTION_REG 0x06h 0x86h ; giriş / çıkış belirleme registeri 0x81h, 0x181h

20 Port C : Her bir biti bağımsız olarak sayısal giriş veya çıkış olarak tanımlanabilmektedir. 8 bit genişliğindedir. SPI, USART, Capture/Compare ve PWM gibi özel fonksiyonlar, ilgili yazmaçların ayarlanmasıyla bu porttan yürütülebilmektedir. İlgili registerler ve adresleri aşağıdaki gibidir. PORTC TRISC 0x07h 0x087h; giriş / çıkış belirleme registeri Port D : Her bir biti bağımsız olarak sayısal giriş veya çıkış olarak tanımlanabilmektedir. 8 bit genişliğindedir. Tüm port bacakları Schmitt Trigger girişlidir. TRISE registerinin 4. biti olan PSPMODE bitini 1 yaparak parallel slave mode da kullanılabilir. Bu fonksiyon aracılığıyla 8 bit genişliğindeki herhangi bir mikroişlemci bus ına bağlanabilir. PORTD TRISD TRISE 0x08h 0x88h; giriş/çıkış belirleme registeri 0x89h Port E : Her bir biti bağımsız olarak giriş veya çıkış olarak tanımlanabilmektedir. 3 bit genişliğindedir. RE0, RE1 ve RE2 bacaklarında Schmitt Trigger giriş tamponları vardır. Her bir bacak analog/sayısal çevirici olarak konfigüre edilebilmektedir. Eğer PORTD paralel slave portu olarak konfigüre edilirse, RE0, RE1 ve RE2 bacakları PORTD nin bağlandığı mikroişlemci bus ında sırasıyla READ, WRITE ve CHIP SELECT kontrol girişleri olarak kullanılır. Bunun için TRISE uygun biçimde ayarlanmalıdır. İlgili registerler ve adresleri aşağıdaki gibidir. PORTE TRISE ADCON1 0x09h 0x89h; giriş/çıkış belirleme registeri 0x9Fh; RE portlarının A/D veya sayısal giriş/çıkış olarak seçiminde kullanılmaktadır.

21 İşlemciye ilk defa gerilim uygulandığında RE0, RE1 ve RE2 üç PORTE pini de A/D çeviricidir. Eğer PORTE nin bazı pinleri sayısal giriş/çıkış olarak kullanmak istenirse ADCON1 registerinde değişiklik yapılması gerekmektedir PIC16F877 in RAM Belleği PIC16F877 nin 0x00~7Fh adres aralığına ayrılmış olan RAM belleği vardır. Bu bellek içerisindeki file registerleri içerisine yerleştirilen veriler PIC CPU sunun çalışmasını kontrol etmektedir. File register adı verilen özel veri alanlarının dışında kalan diğer bellek alanları, normal RAM bellek olarak kullanılmaktadır. Şekil 2.5 de PIC16F877 nin kullanıcı RAM bellek haritası görülmektedir. Şekil 2.5. PIC16F877 nin kullanıcı RAM bellek haritası
22 PIC16F877 nin Besleme Uçları ve Beslemesi PIC16F877 nin besleme gerilimi 11, 12 ve 31, 32 numaralı pinlerden uygulanmaktadır. 11 ve 32 numaralı Vdd ucu +5V a ve 12, 31 numaralı Vss ucu toprağa bağlanır. PIC e ilk defa enerji verildiği anda meydana gelebilecek gerilim dalgalanmaları nedeniyle, oluşabilecek istenmeyen arızaları önlemek amacıyla 100nF lık dekuplaj kondansatörünün devreye bağlanması gerekmektedir. PIC ler CMOS teknolojisi ile üretildiklerinden 2 ila 6 volt arasında çalışabilmektedirler. +5 V luk bir gerilim ise ideal bir değer olmaktadır PIC16F877 nin Reset Uçları Kullanıcının programı kasti olarak kesip başlangıca döndürebilmesi için PIC in 1 numaralı ucu MCLR olarak kullanılmaktadır. MCLR ucuna 0 Volt uygulandığında programın çalışması başlangıç adresine döner. Programın ilk başlangıç adresinden itibaren tekrar çalışabilmesi için, aynı uca +5V gerilim uygulanmalıdır PIC16F877 nin Clock Uçları ve Osilatör Tipleri PIC16CXX mikrodenetleyicilerinde 4 çeşit osilatör bulunmaktadır. 1. RC Osilatör 2. LP ( Kristal kontrollü ) Osilatör 3. XT ( Kristal ve kondansatörlü ) Osilatör 4. HS (Seramik resonatör) Osilatör Kullanıcı bu 4 çeşitten birini seçerek iki konfigürasyon bitini (FOSC1 ve FOSC2) programlayabilir. PIC16F877 de clock uçları 13 ve 14 nolu pinlerdir. Hazırlanacak olan PIC programlarında kullanılan osilatör tipi PIC programının çalışma hızını ve hassasiyetini etkileyeceğinden dolayı amaca uygun bir osilatör devresi kullanılmalıdır. Osilatör tipinin seçiminde dikkat edilecek bir başka nokta ise, seçilecek olan osilatörün kullanılan PIC in özelliğine uygun olarak seçilmesidir. Örnek verecek olursak 10 MHz çalışma frekansına sahip bir PIC16F877 için 20 MHz lik bir osilatör kullanmak doğru olmaz. Fakat daha düşük bir frekans değeri ile çalışan bir osilatör devresi kullanılabilir PIC Mikrodenetleyicisinde Komut Seti ve Program Yazımı PIC16F877 ve PIC16F84 mikrodenetleyicileri Assembly programlama dili adı verilen ve genel amaçlı olarak toplam 35 komuttan oluşan komut seti kullanılarak
23 programlanabilirler. Program basit bir text editörde yazılır ve ASM dosyası olarak kaydedilir. Microchip firmasının ücretsiz sunduğu MPASM derleyici programı aracılığı ile assembly dilinden makine diline çevirilir. MPASM Windows tabanlı derleyicisi ve olması gereken ayar şekli Şekil 2.6 da verilmiştir. PIC mikrodenetleyicisi komutları hakkında detaylı bilgi için (ALTINBAŞAK Orhan ın Mikrodenetleyiciler ve PIC Programlama kitabı) tavsiye edilir. Şekil 2.6. MPASM derleyici programı şekli 2.6. PIC Mikrodenetleyicisine Programın Aktarılması Derlenmiş olan assembly kodları IC-PROG programı ( ve bilgisayarın seri portuna bağlanmış bir donanım yoluyla mikrodenetleyiciye yüklenebilmektedir. IC- PROG programı ilk defa çalıştırıldığında Şekil 2.7 de görülen pencere ekrana gelir. Bu pencerede görülen Arayüz kısmında işletim sistemine bağlı olarak bir değişiklik yapmak gereklidir. Eğer NT tabanlı bir işletim sistemi kullanılıyorsa (Windows NT,2000,XP) Windows API seçilmelidir. Programlayıcı kısmından kullanılan programlayıcı kartı seçilmelidir. Portlar kısmında ise programlayıcı donanım hangi porta bağlı ise o seçilmelidir. Giriş/Çıkış gecikmesi diye adlandırılan kısımda ise kullanılan mikrodenetleyicinin desteklediği bir gecikme seçilmelidir. Microchip firmasına ait bir
24 mikrodenetleyici olan PIC16F84 5 ve üzeri gecikme seviyelerinde programlanabilmektedir. Belirtilen ayarlar yapılıp tamam tuşuna basıldıktan sonra IC- PROG programının ana penceresi ekrana gelir (Şekil 2.8.). Şekil 2.7. IC-PROG programı ilk defa çalıştırıldığında ekran görüntüsü Şekil 2.8. ICPROG programının ekran görüntüsü
25 Bu ekranın sağ üst bölgesinde bulunan seçim kutusundan programlamak istenen entegre numarası seçilir. Daha sonra Dosya menüsünden aç seçeneğine tıklanarak çipe yüklenmek istenen hex dosya açılır ve butonuna basılır. Bu çalışmada kullanılan Microchip firmasının üretmiş olduğu PIC16F877 ve PIC16F84 mikrodenetleyicileri seri olarak programlanabilmektedir. Basitçe bu işlem clock ve veri için iki hat, besleme, toprak ve programlama voltajı için üç hat olmak üzere toplam 5 hatla gerçekleştirilir. Bu hatlar sırasıyla PGD, PGCLK, VDD, VSS ve MCLR pinlerine karşılık gelmektedir. Gerçekleştirilen modülde kullanılan PIC16F877 ve PIC16F84 mikrodenetleyicilerini programlamak için Şekil 2.9 da verilen devre kullanılmıştır. Şekil 2.9. PIC16F877 yi ve PIC16F84 ü programlamak için gereken devre
26 BÖLÜM - III KIZILÖTESİ UZAKTAN KUMANDA Bu çalışmada gerçekleştirilen modüldeki sistemi uzaktan kontrol etmek için kızılötesi ışığı kullanan uzaktan kumanda tipi tercih edilmiştir. Kızılötesi uzaktan kontrol (Infrared Remote Control) kumandaları yaygın kullanım ve RF kumandalara nazaran daha ucuz olmalarından dolayı tercih edilmiştir. Gerçekleştirilen modülde Creative firmasının ürettiği CD-ROM sürücüleri için kullanılan Infrared Kumanda kullanılmıştır. Bu kumandanın tercih edilme sebebi kumandanın boyutlarıdır. Üzerinde 24 adet ihtiyacı karşılayacak kadar çok sayıda tuş bulundurmasına rağmen diğer kumandalara nazaran küçük olması, bir adet 3V luk CR2025 tipinde batarya ile çalışması bu kumandanın tercihin sebebinde etkili olmuştur. Genel olarak bir kızılötesi kumandada Şekil 3.1 deki gibi tuşlar, tuşları algılayan bir yonga (cip) ve bu bilgiyi ortama yayan kızılötesi led veya led grubu bulunmaktadır. Şekil 3.1. Genel bir kızılötesi kumandanın blok şeması Kızılötesi sinyallerin iletildiği ortam havadır. Birçok kızılötesi kaynak iletim için hava ortamını kullanmaktadır. Hava ortamında yayılım varken her verici-alıcı çiftinin aynı hava ortamında birbirlerini etkilemeden iletim sağlayabilmeleri için kendilerine özgü bir haberleşme protokollerinin olması gerekmektedir. Haberleşme teorisinde bu protokollere modülasyon adı verilmektedir. Modülasyonun gerekliliği yüzünden vericide bulunan özel bir çip aynı zamanda bir modülatör olarak da çalışmaktadır. Creative Infrared kumandasında darbe genişlik modülasyonu kodlaması adı verilen bir modülasyon türü kullanılmaktadır. Şekil 3.2 de bir NRZ (Non Return to Zero) (Sıfıra Geri Dönüşsüz) veri ve buna karşılık gelen darbe genişlik modülasyonu kodlaması görülmektedir. Şekilden de
27 görüleceği gibi verinin lojik 0 mı yoksa lojik 1 mi olduğu bir periyot içerisindeki boşluk genişliğiyle kodlanmaktadır. NRZ 010 verisi 3T lik bir zaman diliminde iletilebilecek iken Creative infrared kumandasında kullanılan darbe genişlik modülaysonu kodlamasıyla bu süre 8T ye çıkmaktadır. Bu sürenin uzunluğu veri içerisindeki 1 lerin ve 0 ların sayısıyla değişmektedir. Lojik 0 2T sürede iletilirken lojik 1 4T gibi bir sürede iletilmektedir. Şekil 3.2 (a) 010 bilgisine karşılık gelen NRZ veri kodu (b) 010 bilgisine karşılık gelen darbe genişlik modülasyon kodu Burada belirtilmesi gereken bir konu ise kullanılan kumandanın darbe genişlik modülasyonunda kodlanmış verisi ortama direkt olarak vermemesidir. Kodlanmış veri bir çeşit darbe kod modülasyonuna (PCM e) tabi tutulmaktadır. Burada taşıyıcı frekans 38 KHz dir. Yukarıda verilmiş olan darbe genişlik modülasyonu örneğinin PCM den geçirilmesinden sonra oluşan dalga şekli Şekil 3.3 de verilmiştir. Birçok seri iletişimde olduğu gibi, kullanılan kumanda da verileri çerçevelerle (frame) göndermektedir. Creative Infrared kumandasında veri çerçevesi (data frame) ve tekrar çerçevesi (repeat frame) olarak adlandırılan iki çeşit çerçeve vardır. Her iki tip çerçevenin öncesinde başlangıç zamanı olarak adlandırılabilecek (start time) aktif bir bölge bulunmaktadır ve 9 ms civarında bir süredir. Bu başlangıç zamanından hemen sonraki pasif zaman bölgesinin süresi bir çerçevenin tipini belirlemektedir. Çerçeve, bu süre 4 ms ise veri çerçevesi, 2 ms ise tekrar çerçevesi olarak adlandırılmaktadır (Şekil 3.4). Veri çerçevesi 32 bitlik bilgi içermektedir. Bu 32 bitlik bilgi bir adet 16 bitlik ve iki adet 8 bitlik veri olmak üzere toplam üç parça halinde değerlendirilmektedir. 16 bitlik kısım adres bilgisi içermektedir. Kullanılan kumanda Creative firması tarafından CD-ROM sürücüsü
28 için tasarlanmıştır ve bu CD-ROM sürücüye bir adres verilmiştir. Dolayısıyla CD-ROM sürücüsünü kumanda etmek için önce ona ilgili adresiyle beraber tuş sinyali gönderilmelidir. Creative firmasının CD-ROM sürücüsünün adresi 8435H sayısıdır. Şekil 3.3. Darbe genişlik modülasyonu kodlamasından sonra darbe kod modülasyonu Şekil 3.4. Çerçeve ayrımı İlk 8 bitlik kısım ise basılan tuşa karşılık gelen sayının onaltılık karşılığıdır. Kumanda üzerinde 24 adet tuş bulunmaktadır. Şekil 3.5 teki gibi sol üstteki tuştan itibaren sırayla 1 den 24 e kadar her tuşa bir numara verilmiştir. Daha sonra gelen 8 bitlik bilgi ise ilk 8 bitlik bilginin 1 e tümleyenidir. Örneğin kullanıcı kumanda üzerindeki MENU tuşuna
29 basmışsa kumanda onaltılık FBh sayısını veri çerçevesi içerisinde göndermektedir. Kumanda üzerinde bulunan bütün tuşlara karşılık gelen kodlar Şekil 3.6 da verilmektedir. Creative firmasının CD-ROM sürücüsü uzaktan kumandasında kullanılan ve Şekil 3.2 de gösterilen zaman sabiti T 560 µs lik bir süredir. Darbe genişlik modülasyonu kodlamasına göre lojik 0 bilgisini kodlamak 2T lik, lojik 1 bilgisini kodlamak 4T lik zaman gerektirmektedir. 16 bitlik adres bilgisi 8435h sayısında 6 adet lojik 1, 10 adet lojik 0 bulunmaktadır. Bu da 4x6+10x2=44T lik bir zamana karşılık gelmektedir. 32 bitten geriye 16 bitlik bilgi kalmakta ilk 8 i tuş numarasını sonraki 8 i tuş numarasının 1 e tümleyenini temsil etmektedir. Tümleyen işlemi 16 bitlik bir sayı için ayrılan zamanı sabit bir şekilde tutmaktadır. Şöyle ki; kullanıcı sol üst köşedeki tuşa basmış olsun. Bu tuşa ait sayı 01h ve 1 e tümleyeni ise FEh dir. İkilik sistemde gösterecek olursak bu sayılar sırasıyla ve dır. Görüleceği üzere bu 16 bitlik kısımda 0 ların ve 1 lerin sayısı, basılan tuş ne olursa olsun, eşit ve 8 dir. Böylece 8x2+8x4=48T lik bir zamana karşılık gelmektedir. Toplam olarak bir veri çerçevesi 44+48=92T lik zamanda gönderilmektedir. Bu süre de 51.52ms etmektedir. Eğer kullanıcı kumanda tuşlarından birine belirtilen süreden fazla basık tutarsa kumandadan sürekli olarak o tuşa karşılık gelen 32 bitlik veri çerçevesi gönderilmeyecektir. Tuşa basıldıktan sonra veri çerçevesi sadece iki defa gönderilir. Bu iki çerçeve arasındaki süre ise 40 ms civarındadır. Yani iki çerçevenin gönderilmesi başlangıç zamanları da dahil olmak üzere 200 ms zaman almaktadır. Bu işlemler Şekil 3.7 de gösterilmiştir. Kullanıcı 200 ms den daha fazla bir tuşa basmaya devam ederse kumandadan 100 ms de bir tekrar çerçeveleri gönderilir. Bu da kumandanın bataryasında önemli ölçüde tasarruf sağlamaktadır. Kullanılan kumanda PCM sinyaller ürettiği için alıcı kısımda ilk önce bu PCM sinyallerin darbe genişlik modülasyonu kodlarına çevrilmesi gerekmektedir. Bu çevirme işleminden sonra darbe genişlik modülasyonu kodun hangi tuşa ait olduğu mikrodenetleyiciye yüklenecek yazılımla çözülebilmektedir. PCM sinyalleri çevirmek için Vishay firmasının PCM uzaktan kontrol sistemleri için üretmiş olduğu TSOP1238 foto modülü kullanılmıştır. Kullanılan foto modülün görüntüsü ve blok şeması Şekil 3.8 de verilmiştir. Bu foto modül üzerine 38 KHz de darbelenmiş ışık düştüğünde çıkışını 0V a çekmektedir ve direkt olarak mikrodenetleyiciye bağlanabilmektedir. Bir PCM giriş için modül çıkışı Şekil 3.9 da gösterilmiştir.
30 Şekil 3.5. Uzaktan kumanda üzerindeki tuşlara karşılık gelen sayılar Şekil 3.6. Uzaktan kumanda da bulunan tuşların 32 bitlik karşılıkları Uzaktan kumanda ve foto modül ile verilen bu bilgiler doğrultusunda, kumandadan hangi tuşa basıldığını bulan ve Microchip firmasının üretmiş olduğu PIC16F877
31 mikrodenetleyicisi birçoğuna kolaylıkla uyarlanabilecek bir program yazılımı dördüncü bölümde anlatılmaktadır. Şekil 3.7. İki adet veri çerçevesinin ardından tekrar çerçevelerinin gönderilmesi
32 Şekil 3.8. TSOP1238 foto modülü ve blok şeması Şekil 3.9. TSOP1238 foto modülünün giriş ve çıkış ilişkisi
33 BÖLÜM - IV GERÇEKLEŞTİRİLEN MODÜLÜN DEVRE DONANIMI VE YAZILIMI Bu bölümde gerçekleştirilmiş olunan uzaktan kontrol modülünün devre donanım yapısı ve kontrol için kullanılan PIC16F877 ve PIC16F84 mikrodenetleyicileri içine yüklenen programın içeriğinden söz edilecektir. 4.1 Gerçekleştirilen Modül Donanımı Geçekleştirilen modülde aşağıdaki devreler parça parça olarak incelenecektir. 1. Güç kaynağı ve Sıfır geçiş algılayıcı devresi 2. Uzaktan Kumanda alıcı devresi 3. Display sürücü devresi 4. Kontrol devresi 5. Röle sürücü devresi 6. Optokuplör ve Triyaklı sürücü devresi 7. Optokuplör ve Triyaklı dimmer devresi Güç Kaynağı ve Sıfır Geçiş Algılayıcı Devresi Modüldeki devrelerin gereksinim duyduğu +5V ve +12V DC kaynak ihtiyacı ve Optokuplör ve Triyaklı dimmer devresinde kullanılacak yükün şebeke gerilimiyle uyumu için sıfır geçiş algılayıcı ihtiyacı için tasarlanmıştır. Devre kullanılmış olan 220V AC Transformatör (Şekil 4.1) aracılıyla A ve N uçlarından 17V AC kaynak tam dalga doğrulması yapılarak, 7805 ve 7812 regüle elemanları ile +5V DC ve +12V DC kaynaklara dönüştürülmektedir. Devre üzerinde ilaveten 5.1V zener diyot üzerinden sıfır geçiş algılayıcısıda bulunmaktadır. Şekil 4.2 de sıfır geçiş algılayıcısının giriş/çıkış grafiği verilmektedir. Şekil 4.3 de güç kaynağı ve sıfır geçiş algılayıcı devresi verilmektedir. Şekil 4.1. Üç Çıkışlı Transformatör
34 Şekil 4.2. Sıfır geçiş algılayıcısı giriş/çıkış grafiği Şekil 4.3. Güç kaynağı ve Sıfır geçiş algılayıcı devresi Uzaktan Kumanda Alıcı Devresi Bölüm 3 te verilen bilgiler ışığında kumandadan gelen sinyalin PIC16F877 mikrodenetleyicisinde kodunun çözülmesi için TSOP1238 uzaktan kumanda alıcı devresi tasarlanmıştır. Tasarlanan devre Şekil 4.4 de verilmiştir Display Sürücü Devresi PIC16F877 ile uzaktan kumandanın tuş kodu çözüldükten sonra kumanda üzerindeki bir sayıya basıldığında ekranda gözükmesi gereken sayı için tasarlanan display sürücü devresi Şekil 4.5 te verilmiştir.
35 Şekil 4.4. Uzaktan kumanda algılayıcı devresi Şekil 4.5. Display sürücü devresi Kontrol Devresi Gerçekleştirilen modülün PIC16F877 ve PIC16F84 ile kontrol devresi Şekil 4.6 da verilmiştir Röle Sürücü Devresi PIC16F877 mikrodenetleyicisinden gelen PORT B uçları aracılığıyla 8 adet röle anahtarlama amaçlı olarak sürülmektedir. Şekil 4.7 de Röle sürücü devresi verilmiştir.
36 Şekil 4.6. Gerçekleştirilen modülün konrol devresi genel olarak Şekil 4.7. Röle sürücü devresi
37 Optokuplör ve Triyaklı Sürücü Devresi PIC16F877 mikrodenetleyicisinden gelen PORT D uçları aracılığıyla 8 adet triyak anahtarlama amaçlı olarak sürülmektedir. Şekil 4.8 de Optokuplör ve triyaklı sürücü devresi verilmiştir. Şekil 4.8. Optokuplör ve Triyaklı sürücü devresi Optokuplör ve Triyaklı Dimmer Devresi PIC16F877 mikrodenetleyicisinden tetikleme açı bilgisi PIC16F84 e verilmektedir. PIC16F84 ün PORT B0 ucu aracılığıyla optokuplör ve triyaklı dimmer devresi sürülmektedir. Şekil 4.8 de Optokuplör ve triyaklı sürücü devresi ile aynı devre şeklindedir. Gerçekleştirilen modüle ait devre fotoğrafları EK-3 te görülmektedir Gerçekleştirilen Modül Yazılımı PIC16F877 Mikrodenetleyici Yazılımı Gerçekleştirilen modülde PIC16F877 mikrodenetleyicisi ile uzaktan kumanda kodunun çözülme işlemi, 8 adet rölenin B portundan anahtarlama olarak sürülmesi, 8 adet optokuplör ve triyakın D portundan anahtarlama olarak sürülmesi, PIC16F84 e giden açı bilgisinin A portundan gönderilmesi ve basılan sayısal tuşun displayde gösterilmesi için C Portunun C7, C6, C5 ve C4 uçlarının sürülmesi, Röle ve Triyak anahtarlamasını belirten sarı veya kırmızı led in sürülmesi için C portunun C0 ve C1 uçları aktif edilmesi işlemleri
38 yerine getirilmektedir. PIC16F877 için assembly programlama dilinde yazılan program EK-1 de görülmektedir PIC16F84 Mikrodenetleyici Yazılımı Gerçekleştirilen modülde PIC16F84 mikrodenetleyicisi ile PIC16F877 den gelen açı bilgisiyle beraber sıfır geçiş algılayıcısından gelen bilginin A portu ile alınması ve Açı değerine göre B portunun B0 uçundan optokuplör ve triyaklı dimmer devresinin sürülmesi işlemi yerine getirilmektedir. PIC16F84 için assembly programlama dilinde yazılan program EK-2 de görülmektedir. 4.3 Gerçekleştirilen Modül Çalışması Gerçekleştirilen modülde Creative infrared uzaktan kumandasındaki Menu tuşu ile anahtarlama olarak kullanılacak röle veya triyak grubunun seçimi yapılır. Seçilen grup display üzerindeki sarı led yanıyorsa röle anahtarlama grubu, kırmızı led yanıyorsa triyak anahtarlama grubu olduğu anlaşılmaktadır. Daha sonra kumanda üzerindeki ilgili sayısal tuşa basılarak ilgili gruptan bir anahtarlama elemanı seçilmektedir. Seçilen anahtarlama elemanı Menu tuşunun altındaki tuş ile aktif (ON), aktif tuşunun altındaki tuş ile de pasif (OFF) yapılmaktadır. Dimmer devresinin açı bilgisi ise kumanda üzerindeki artı ve eksi tuşları ile arttırılıp azaltılabilmektedir.
39 BÖLÜM - V SONUÇ Bu bitirme tezi çalışmasının amacı kızılötesi uzaktan kumanda ile genel amaçlı uzaktan kumanda modülünün tasarımı ve gerçekleştirilmesidir. Bu çalışmada bir uzaktan kumanda cihazı yardımıyla 8 adet rölenin ve 8 adet triyakın anahtarlanması ve 1 adet triyakın dimmer olarak kontrol edilmesi gerçekleştirilmiştir. Uzaktan kumanda cihazı olarak Creative firmasının CD-ROM sürücüler için ürettiği bir uzaktan kumandanın kod bilgisi çözülerek, sistemi kontrol etmek amaçlı bir PIC16F877 ve bir PIC16F84 mikrodenetleyicisi kullanılmıştır.
40 EK - 1 PIC16F877 Mikrodenetleyici Programı ; ; Kurtulus TUFEKCI - Elk. Electronic Engineer & Computer Programmer - ; Creative Infra Control PIC16F877 - ; File : KTPIC877.ASM Date : Country : Ankara/TURKEY - ; LIST P=16F877 #INCLUDE "P16F877.INC" CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _XT_OSC & _BODEN_OFF & _LVP_OFF & _CPD_OFF CBLOCK 0X20 ;Değişken adresi atama başlangıcı VAR1 VAR2 VAR3 VAR4 DEG1 DEG2 DEG3 DEG4 TUS GORUNEN AKTIFTUS KAYANTUS KONTROL TETIKLEME SAYAC1 SAYAC2 ENDC ;Değişken adresi atama sonu ORG 0x0000 ;Program başlangıç adresi CLRF PORTA ;Çıkışları temizle MOVLW H'FF' MOVWF PORTB CLRF PORTC CLRF PORTD CLRF PORTE
41 AYARLA ;Giriş/Çıkış ayarlama başlangıcı BSF STATUS,RP0 MOVLW B' ' MOVWF ADCON1 MOVLW B' ' MOVWF TRISE CLRF TRISA CLRF TRISB CLRF TRISC CLRF TRISD BCF STATUS,RP0 ;Giris/Cikis ayarlama sonu CLRF VAR1 ;Degiskenleri temizle CLRF VAR2 CLRF VAR3 CLRF VAR4 CLRF TUS CLRF GORUNEN CLRF AKTIFTUS CLRF KAYANTUS MOVLW H'04' MOVWF TETIKLEME CLRF KONTROL BSF PORTC,0 KARARLIBASLA ;İşlem öncesi karalı ol CALL BEKLE1S CALL BEKLE1S CALL BEKLE1S CALL BEKLE1S CALL BEKLE1S KARARLIMI BTFSS PORTE,0 GOTO KARARLIMI ;Evet artık kararlı PRGBASLA ;Ana Program başlangıcı BTFSC PORTE,0 GOTO PRGBASLA CALL KOD_CEVIR CALL BEKLE1S CALL TUS_TEST CALL ISLEM_YAP GOTO PRGBASLA ;Ana Program sonu
42 KOD_CEVIR ;Kod çevirme alt program başlangıcı BTFSS PORTE,0 GOTO KOD_CEVIR BSF KONTROL,0 ;Tuş baslınca aktif oldu CLRF DEG2 KOD_ZAMAN MOVLW h'20' MOVWF DEG1 DECFSZ DEG1,F GOTO $-1 INCF DEG2,F BTFSC PORTE,0 GOTO KOD_ZAMAN MOVF DEG2,W SUBLW d'32' BTFSC STATUS,C GOTO KOD_REPEAT MOVLW b' ' MOVWF VAR4 CLRF VAR3 CLRF VAR2 CLRF VAR1 KOD_TEST2 BTFSS PORTE,0 GOTO KOD_TEST2 CALL BEKLE800 BTFSC PORTE,0 GOTO KOD_GELEN1 GOTO KOD_GELEN0 KOD_GELEN1 MOVLW h'ff' ADDLW h'ff' RLF VAR4,F RLF VAR3,F RLF VAR2,F RLF VAR1,F BTFSC STATUS,C GOTO KOD_32CIKIS KOD_GELEN1TST BTFSC PORTE,0
43 GOTO KOD_GELEN1TST GOTO KOD_TEST2 KOD_GELEN0 MOVLW h'00' ADDLW h'00' RLF VAR4,F RLF VAR3,F RLF VAR2,F RLF VAR1,F BTFSC STATUS,C GOTO KOD_32CIKIS GOTO KOD_TEST2 KOD_REPEAT GOTO KOD_CIKIS KOD_32CIKIS RETURN ;Kod çevirme alt program sonu KOD_CIKIS RETURN ;Kod çevirme alt program sonu BEKLE800 ;800 mikrosaniye alt program başlangıcı MOVLW h'01' MOVWF SAYAC1 BEKLE800_1 MOVLW h'ff' MOVWF SAYAC2 BEKLE800_2 DECFSZ SAYAC2,F GOTO BEKLE800_2 DECFSZ SAYAC1,F GOTO BEKLE800_1 RETURN ;800 mikrosaniye alt program sonu BEKLE1S ;1 saniye alt program başlangıcı MOVLW h'ff' MOVWF SAYAC1 BEKLE1S_1 MOVLW h'ff' MOVWF SAYAC2 BEKLE1S_2 DECFSZ SAYAC2,F GOTO BEKLE1S_2 DECFSZ SAYAC1,F GOTO BEKLE1S_1
44 RETURN ;1 saniye alt program sonu TUS_TEST MOVF XORLW BTFSS GOTO MOVF XORLW BTFSS GOTO COMF XORWF BTFSS GOTO GOTO TUS_HATALI MOVLW MOVWF RETURN TUS_SAGLAM MOVF MOVWF RETURN ISLEM_YAP MOVF XORLW BTFSC GOTO MOVF XORLW BTFSC GOTO MOVF XORLW BTFSC GOTO MOVF XORLW BTFSC GOTO MOVF VAR1,W h'84' STATUS,Z TUS_HATALI VAR2,W h'35' STATUS,Z TUS_HATALI VAR4,W VAR3,W STATUS,Z TUS_HATALI TUS_SAGLAM H'00' TUS VAR3,W TUS TUS,W h'10' STATUS,Z ARTI_TUSU TUS,W h'14' STATUS,Z EKSI_TUSU TUS,W h'08' STATUS,Z AKTIF_TUSU TUS,W h'0c' STATUS,Z PASIF_TUSU TUS,W ;Tusu test etme alt programı başlangıcı ;Tuşu test etme alt programı sonu ;Tuşu test etme alt programı sonu ;İstenen işlemi yapma alt programı başlangıcı
45 XORLW h'04' BTFSC STATUS,Z GOTO SECME_TUSU GOTO DISPLAY AKTIF_TUSU BTFSS KONTROL,0 GOTO AKTIF_CIKISI MOVF GORUNEN,W XORLW h'00' BTFSC STATUS,Z GOTO AKTIF_CIKISI MOVF GORUNEN,W XORLW h'09' BTFSC STATUS,Z GOTO AKTIF_CIKISI BTFSS KONTROL,1 GOTO AKTIF_ROLE GOTO AKTIF_TRIYAK AKTIF_ROLE MOVF GORUNEN,W MOVWF AKTIFTUS MOVLW B' ' MOVWF KAYANTUS MOVLW h'ff' ADDLW h'ff' RLF KAYANTUS,F AKTIF_AZALTRR RLF KAYANTUS,F DECF AKTIFTUS,F BTFSS STATUS,Z GOTO AKTIF_AZALTRR MOVF PORTB,W ANDWF KAYANTUS,F MOVF KAYANTUS,W MOVWF PORTB GOTO AKTIF_CIKISI AKTIF_TRIYAK MOVF GORUNEN,W MOVWF AKTIFTUS MOVLW B' ' MOVWF KAYANTUS
46 MOVLW h'00' ADDLW h'00' RLF KAYANTUS,F AKTIF_AZALTTT RLF KAYANTUS,F DECF AKTIFTUS,F BTFSS STATUS,Z GOTO AKTIF_AZALTTT MOVF PORTD,W IORWF KAYANTUS,F MOVF KAYANTUS,W MOVWF PORTD GOTO AKTIF_CIKISI AKTIF_CIKISI BCF KONTROL,0 GOTO ISLEM_CIKISI PASIF_TUSU BTFSS KONTROL,0 GOTO PASIF_CIKISI MOVF GORUNEN,W XORLW h'00' BTFSC STATUS,Z GOTO PASIF_CIKISI MOVF GORUNEN,W XORLW h'09' BTFSC STATUS,Z GOTO PASIF_CIKISI BTFSS KONTROL,1 GOTO PASIF_ROLE GOTO PASIF_TRIYAK PASIF_ROLE MOVF GORUNEN,W MOVWF AKTIFTUS MOVLW B' ' MOVWF KAYANTUS MOVLW h'00' ADDLW h'00' RLF KAYANTUS,F PASIF_AZALTRR RLF KAYANTUS,F DECF AKTIFTUS,F
47 BTFSS STATUS,Z GOTO PASIF_AZALTRR MOVF PORTB,W IORWF KAYANTUS,F MOVF KAYANTUS,W MOVWF PORTB GOTO PASIF_CIKISI PASIF_TRIYAK MOVF GORUNEN,W MOVWF AKTIFTUS MOVLW B' ' MOVWF KAYANTUS MOVLW h'ff' ADDLW h'ff' RLF KAYANTUS,F PASIF_AZALTTT RLF KAYANTUS,F DECF AKTIFTUS,F BTFSS STATUS,Z GOTO PASIF_AZALTTT MOVF PORTD,W ANDWF KAYANTUS,F MOVF KAYANTUS,W MOVWF PORTD GOTO PASIF_CIKISI PASIF_CIKISI BCF KONTROL,0 GOTO ISLEM_CIKISI SECME_TUSU BTFSS KONTROL,0 GOTO SECME_CIKISI MOVLW B' ' XORWF KONTROL,F BTFSS KONTROL,1 GOTO SECME_ROLE GOTO SECME_TRIYAK SECME_ROLE BSF PORTC,0 BCF PORTC,1 GOTO SECME_CIKISI SECME_TRIYAK
48 BSF PORTC,1 BCF PORTC,0 GOTO SECME_CIKISI SECME_CIKISI BCF KONTROL,0 GOTO ISLEM_CIKISI ARTI_TUSU BTFSS KONTROL,0 GOTO ARTIR_CIKISI INCF TETIKLEME,1 BTFSC TETIKLEME,4 GOTO ARTIR_SON GOTO ARTIR_CIKISI ARTIR_SON MOVLW H'0F' MOVWF TETIKLEME GOTO ARTIR_CIKISI ARTIR_CIKISI BCF KONTROL,0 MOVF TETIKLEME,W MOVWF PORTA GOTO ISLEM_CIKISI EKSI_TUSU BTFSS KONTROL,0 GOTO AZALT_CIKISI DECF TETIKLEME,1 MOVF TETIKLEME,W SUBLW d'04' BTFSC STATUS,C GOTO AZALT_SON GOTO AZALT_CIKISI AZALT_SON MOVLW H'04' MOVWF TETIKLEME GOTO AZALT_CIKISI AZALT_CIKISI BCF KONTROL,0 MOVF TETIKLEME,W MOVWF PORTA GOTO ISLEM_CIKISI DISPLAY
49 MOVF TUS,W XORLW h'09' BTFSC STATUS,Z GOTO BIR_TUSU MOVF TUS,W XORLW h'0a' BTFSC STATUS,Z GOTO IKI_TUSU MOVF TUS,W XORLW h'0b' BTFSC STATUS,Z GOTO UC_TUSU MOVF TUS,W XORLW h'0d' BTFSC STATUS,Z GOTO DORT_TUSU MOVF TUS,W XORLW h'0e' BTFSC STATUS,Z GOTO BES_TUSU MOVF TUS,W XORLW h'0f' BTFSC STATUS,Z GOTO ALTI_TUSU MOVF TUS,W XORLW h'11' BTFSC STATUS,Z GOTO YEDI_TUSU MOVF TUS,W XORLW h'12' BTFSC STATUS,Z GOTO SEKIZ_TUSU MOVF TUS,W XORLW h'13' BTFSC STATUS,Z GOTO DOKUZ_TUSU MOVF TUS,W XORLW h'16' BTFSC STATUS,Z GOTO SIFIR_TUSU GOTO ISLEM_CIKISI
50 BIR_TUSU MOVLW MOVWF SWAPF MOVWF GOTO IKI_TUSU MOVLW MOVWF SWAPF MOVWF GOTO UC_TUSU MOVLW MOVWF SWAPF MOVWF GOTO DORT_TUSU MOVLW MOVWF SWAPF MOVWF GOTO BES_TUSU MOVLW MOVWF SWAPF MOVWF GOTO ALTI_TUSU MOVLW MOVWF SWAPF MOVWF GOTO YEDI_TUSU MOVLW MOVWF SWAPF H'01' GORUNEN GORUNEN,W PORTC DISP_TEST H'02' GORUNEN GORUNEN,W PORTC DISP_TEST H'03' GORUNEN GORUNEN,W PORTC DISP_TEST H'04' GORUNEN GORUNEN,W PORTC DISP_TEST H'05' GORUNEN GORUNEN,W PORTC DISP_TEST H'06' GORUNEN GORUNEN,W PORTC DISP_TEST H'07' GORUNEN GORUNEN,W
51 MOVWF PORTC GOTO DISP_TEST SEKIZ_TUSU MOVLW H'08' MOVWF GORUNEN SWAPF GORUNEN,W MOVWF PORTC GOTO DISP_TEST DOKUZ_TUSU MOVLW H'09' MOVWF GORUNEN SWAPF GORUNEN,W MOVWF PORTC GOTO DISP_TEST SIFIR_TUSU MOVLW H'00' MOVWF GORUNEN SWAPF GORUNEN,W MOVWF PORTC GOTO DISP_TEST DISP_TEST BTFSS KONTROL,1 GOTO DISP_ROLE GOTO DISP_TRIYAK DISP_ROLE BSF PORTC,0 BCF PORTC,1 GOTO ISLEM_CIKISI DISP_TRIYAK BSF PORTC,1 BCF PORTC,0 GOTO ISLEM_CIKISI ISLEM_CIKISI RETURN ;İstenen işlemi yapma alt programı sonu END
52 EK - 2 PIC16F84 Mikrodenetleyici Programı ; ; Kurtulus TUFEKCI - Elk. Electronic Engineer & Computer Programmer - ; Creative Infra Control PIC16F84 - ; File : KTPIC84.ASM Date : Country : Ankara/TURKEY - ; LIST P=16F84 #INCLUDE "P16F84.INC" CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _XT_OSC CBLOCK 0X0C ;Değişken adres atama başlangıcı ACI SAYAC1 SAYAC2 ENDC ;Değişken adres atama sonu ORG 0x0000 ;Program Başlangıç adresi CLRF PORTB ;Çıkışları temizle CLRF ACI AYARLA ;Giriş/Çıkış ayarlama başlangıcı BSF STATUS,RP0 CLRF TRISB MOVLW h'ff' MOVWF TRISA BCF STATUS,RP0 ;Giriş/Çıkış ayarlama sonu PRGBASLA ;Ana Program Başlangıcı POZITIF BTFSS PORTA,4 ;Pozitif alternasta gücü ayarla GOTO POZITIF CALL ACIAL CALL TETIKLE NEGATIF BTFSC PORTA,4 ;Negatif alternasta gücü ayarla GOTO NEGATIF CALL ACIAL CALL TETIKLE GOTO POZITIF ACIAL MOVF PORTA,W ;Acı Bilgisini al ve işlem yapmaya başla
PIC 16F877 nin kullanılması
 PIC 16F877 nin kullanılması, dünyada kullanıma sunulmasıyla eş zamanlı olarak Türkiye de de uygulama geliştirenlerin kullanımına sunuldu., belki de en popüler PIC işlemcisi olan 16F84 ten sonra kullanıcılara
PIC 16F877 nin kullanılması, dünyada kullanıma sunulmasıyla eş zamanlı olarak Türkiye de de uygulama geliştirenlerin kullanımına sunuldu., belki de en popüler PIC işlemcisi olan 16F84 ten sonra kullanıcılara
Deney No Deney Adı Tarih. 3 Mikrodenetleyici Portlarının Giriş Olarak Kullanılması / /201...
 3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
3.1 AMAÇ: Assembly programlama dili kullanarak mikrodenetleyici portlarını giriş olarak kullanmak. GİRİŞ: Bir portun giriş olarak mı yoksa çıkış olarak mı kullanılacağını belirten TRIS kaydedicileridir.
Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk.
 HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
HARRAN ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ Mikroişlemciler Ara Sınav---Sınav Süresi 90 Dk. 15 Nisan 2014 1) (10p) Mikroişlemcilerle Mikrodenetleyiceleri yapısal olarak ve işlevsel olarak karşılaştırarak
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI
 PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
PIC MİKROKONTROLÖR TABANLI MİNİ-KLAVYE TASARIMI Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa, KKTC E-mail: dogan@neu.edu.tr, Tel: (90) 392 2236464 ÖZET Bilgisayarlara
16F84 ü tanıt, PORTB çıkış MOVLW h FF MOWF PORTB
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 3) Doç. Dr. Hakan Ündil Program Örneği 9 : Gecikme altprogramı kullanarak Port B ye bağlı tüm LED leri yakıp söndüren bir program için akış
PIC TABANLI, 4 BASAMAKLI VE SER
 PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
PIC TABANLI, 4 BASAMAKLI VE SERİ BAĞLANTILI 7 SEGMENT LED PROJESİ Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Mühendislik Fakültesi, Bilgisayar Mühendisliği Bölümü, Lefkoşa E-mail: dogan@neu.edu.tr,
LCD (Liquid Crystal Display )
") LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
W SAYAC SAYAC SAYAC. SAYAC=10110110 ise, d=0 W 01001001
 MOVLW k Move Literal to W k sabit değerini W saklayıcısına yükler. MOVLW h'1a' W 1A. Hexadecimal 1A sayısı W registerine yüklenir. MOVF f,d Move f f saklayıcısının içeriğini W veya f'e yükler. MOVF SAYAC,0
MOVLW k Move Literal to W k sabit değerini W saklayıcısına yükler. MOVLW h'1a' W 1A. Hexadecimal 1A sayısı W registerine yüklenir. MOVF f,d Move f f saklayıcısının içeriğini W veya f'e yükler. MOVF SAYAC,0
İstanbul Teknik Üniversitesi IEEE Öğrenci Kolu
 Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Step Motor Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak
Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre
 MİKRODENETLEYİCİLER Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre Mikrodenetleyici: Bir mikroişlemcinin
MİKRODENETLEYİCİLER Mikroişlemci: Merkezi işlem biriminin fonksiyonlarını tek bir yarı iletken tümleşik devrede birleştiren programlanabilir sayısal elektronik devre Mikrodenetleyici: Bir mikroişlemcinin
IŞIĞA YÖNELEN PANEL. Muhammet Emre Irmak. Mustafa Kemal Üniversitesi Mühendislik Fakültesi. Elektrik-Elektronik Mühendisliği Bölümü
 IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
IŞIĞA YÖNELEN PANEL Muhammet Emre Irmak Mustafa Kemal Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü e-posta: memreirmak@gmail.com ÖZET Işığa yönelen panel projesinin amacı,
T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ. Uzaktan Kumanda Edilen Lamba Dimmer inin Gerçekleştirilmesi
 T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ Uzaktan Kumanda Edilen Lamba Dimmer inin Gerçekleştirilmesi BİTİRME ÖDEVİ Danışman Yrd. Doç. Dr. Murat UZAM Hazırlayan
T.C. NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ Uzaktan Kumanda Edilen Lamba Dimmer inin Gerçekleştirilmesi BİTİRME ÖDEVİ Danışman Yrd. Doç. Dr. Murat UZAM Hazırlayan
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı
 1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
1. PORTB ye bağlı 8 adet LED i ikili sayı sisteminde yukarı saydıracak programı yazınız. SAYAC1 EQU 0X20 devam movlw B'00000000' call DELAY incf PORTB,f ;Akü ye 0' sabit değerini yaz. ;Aküdeki değer PORTB
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
Program Kodları. void main() { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }
 { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }") Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA UYGULAMA_05_01 UYGULAMA_05_01. Doç.Dr. SERDAR KÜÇÜK
 UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
UYGULAMA 05_01 MİKRODENETLEYİCİLER 5.HAFTA Doç.Dr. SERDAR KÜÇÜK PORTB den aldığı 8 bitlik giriş bilgisini PORTD ye bağlı LED lere aktaran MPASM (Microchip Pic Assembly) Doç. Dr. Serdar Küçük SK-2011 2
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
1 MİKROİŞLEMCİLER RESET Girişi ve DEVRESİ Program herhangi bir nedenle kilitlenirse ya da program yeniden (baştan) çalıştırılmak istenirse dışarıdan PIC i reset yapmak gerekir. Aslında PIC in içinde besleme
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş HUNRobotX - PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel - 4 Haziran
Hacettepe Robot Topluluğu PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş HUNRobotX - PIC Assembly Dersleri 1. Ders: PIC Programlamaya Giriş Yazan: Kutluhan Akman, Düzenleyen: Canol Gökel - 4 Haziran
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK. PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü
 DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
DERS 7 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 örnek programlar Dallanma komutları Sonsuz döngü Ders 7, Slayt 2 1 PROGRAM 1 RAM bellekte 0x0C ve 0x0D hücrelerinde tutulan iki 8-bit sayının toplamını hesaplayıp
PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ
 DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
DERSĐN ADI : MĐKROĐŞLEMCĐLER II DENEY ADI : PIC 16F84 VE ĐKĐ BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE TEK BUTONLA BĐR LED KONTROLÜ PIC 16F84 VE VAVĐYEN ANAHTAR ĐLE BĐR LED KONTROLÜ ÖĞRENCĐ ĐSMĐ : ALĐ METĐN
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
Assembler program yazımında direkt olarak çizgi ile gösterilmemesine rağmen ekranınız ya da kağıdınız 4 ayrı sütunmuş gibi düşünülür.
 BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
BÖLÜM 4 4. PIC PROGRAMLAMA Herhangi bir dilde program yazarken, öncelikle kullanılacak dil ve bu dilin editörünü kullanabilmek önemlidir. Biz bu işlem için Mplab programını kullanacağız. Bu sebeple aslında
Sistem Gereksinimleri: Uygulama Gelistirme: PIC Mikroislemcisinin Programlanmasi: PIC Programlama Örnekleri -1
 PIC Programlama Örnekleri -1 Sistem Gereksinimleri: PIC programlayicinin kullanilabilmesi için; Win98 ve üstü bir isletim sistemi Paralel port 60 MB veya daha üstü disk alani gerekmektedir. Ancak programlama
PIC Programlama Örnekleri -1 Sistem Gereksinimleri: PIC programlayicinin kullanilabilmesi için; Win98 ve üstü bir isletim sistemi Paralel port 60 MB veya daha üstü disk alani gerekmektedir. Ancak programlama
Hacettepe Robot Topluluğu
 Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
Hacettepe Robot Topluluğu Makaleler PIC ile LED Yakıp Söndüren Devre PIC ile LED Yakıp Söndüren Devre Canol Gökel - 13 Ekim 2006 Giriş Merhaba arkadaşlar, bu makalemizde PIC'e yeni başlayanlar için basit
DERS 5 PIC 16F84 PROGRAMLAMA İÇERİK. PIC 16F84 bacak bağlantıları PIC 16F84 bellek yapısı Program belleği RAM bellek Değişken kullanımı Komutlar
 DERS 5 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 bacak bağlantıları PIC 16F84 bellek yapısı Program belleği RAM bellek Değişken kullanımı Komutlar Ders 5, Slayt 2 1 BACAK BAĞLANTILARI Ders 5, Slayt 3 PIC
DERS 5 PIC 16F84 PROGRAMLAMA İÇERİK PIC 16F84 bacak bağlantıları PIC 16F84 bellek yapısı Program belleği RAM bellek Değişken kullanımı Komutlar Ders 5, Slayt 2 1 BACAK BAĞLANTILARI Ders 5, Slayt 3 PIC
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
PIC Mikrodenetleyiciler. Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1
 PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
PIC Mikrodenetleyiciler PIC MCU= CPU + I/O pinleri+ Bellek(RAM/ROM) Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 PIC Mikro denetleyici Programlama Assembly programlama dili, çoğu zaman özel alanlarda geliştirilen
EEM 419-Mikroişlemciler Güz 2017
 EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
KOMUT AÇIKLAMALARI VE ÖRNEKLERİ
 KOMUT AÇIKLAMALARI VE ÖRNEKLERİ Komut açıklamalarında kullanılan harflerin anlamları: F : File(dosya), kaynak ve bilgi alınan yeri ifade eder. D : Destination (hedef), işlem sonucunun kaydedileceği yer.
KOMUT AÇIKLAMALARI VE ÖRNEKLERİ Komut açıklamalarında kullanılan harflerin anlamları: F : File(dosya), kaynak ve bilgi alınan yeri ifade eder. D : Destination (hedef), işlem sonucunun kaydedileceği yer.
RF İLE ÇOK NOKTADAN KABLOSUZ SICAKLIK ÖLÇÜMÜ
 RF İLE ÇOK NOKTADAN KABLOSUZ SICAKLIK ÖLÇÜMÜ Fevzi Zengin f_zengin@hotmail.com Musa Şanlı musanli@msn.com Oğuzhan Urhan urhano@kou.edu.tr M.Kemal Güllü kemalg@kou.edu.tr Elektronik ve Haberleşme Mühendisliği
RF İLE ÇOK NOKTADAN KABLOSUZ SICAKLIK ÖLÇÜMÜ Fevzi Zengin f_zengin@hotmail.com Musa Şanlı musanli@msn.com Oğuzhan Urhan urhano@kou.edu.tr M.Kemal Güllü kemalg@kou.edu.tr Elektronik ve Haberleşme Mühendisliği
BÖLÜM 1: MİKRODENETLEYİCİLER
 V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
LCD (Liquid Crystal Display)
") LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil Bahar-Vize
 Prof. Dr. Hakan Ündil Bahar-Vize") MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil 2014-2015 Bahar-Vize BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKRO DENETLEYİCİLER II DERS NOTLARI (VİZE KONULARI) Prof. Dr. Hakan Ündil 2014-2015 Bahar-Vize BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
PROGRAMLANABİLİR ZAMANLAYICI
 T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PROGRAMLANABİLİR ZAMANLAYICI BİTİRME ÇALIŞMASI SULTAN ÜÇOK 203786 HAZİRAN,2011 TRABZON T.C. KARADENİZ TEKNİK
T.C. KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PROGRAMLANABİLİR ZAMANLAYICI BİTİRME ÇALIŞMASI SULTAN ÜÇOK 203786 HAZİRAN,2011 TRABZON T.C. KARADENİZ TEKNİK
BESLEME KARTI RF ALICI KARTI
 BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
DOKUMANLAR
 DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
PIC MİKRODENETLEYİCİLERİN HAFIZA YAPISI. Temel olarak bir PIC içerisinde de iki tür hafıza bulunur:
 PIC MİKRODENETLEYİCİLERİN HAFIZA YAPISI Temel olarak bir PIC içerisinde de iki tür hafıza bulunur: 1. Program Hafızası (ROM,PROM,EPROM,FLASH) Programı saklar, kalıcıdır. 2. Veri Hafızası (RAM, EEPROM)
PIC MİKRODENETLEYİCİLERİN HAFIZA YAPISI Temel olarak bir PIC içerisinde de iki tür hafıza bulunur: 1. Program Hafızası (ROM,PROM,EPROM,FLASH) Programı saklar, kalıcıdır. 2. Veri Hafızası (RAM, EEPROM)
KONFİGÜRASYON BİTLERİ
 MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 2) Doç. Dr. Hakan Ündil INCLUDE Dosyalar Assembly programlarını yazarken kullanılacak register adreslerini (EQU) komutu ile tanımlamak hem
MİKROİŞLEMCİLER VE MİKRODENETLEYİCİLER 1 - DERS NOTLARI (Kısım 2) Doç. Dr. Hakan Ündil INCLUDE Dosyalar Assembly programlarını yazarken kullanılacak register adreslerini (EQU) komutu ile tanımlamak hem
PIC UYGULAMALARI. Öğr.Gör.Bülent Çobanoğlu
 PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
PIC UYGULAMALARI STEP MOTOR UYGULAMLARI Step motor Adım motorları (Step Motors), girişlerine uygulanan lojik sinyallere karşılık analog dönme hareketi yapan fırçasız, sabit mıknatıs kutuplu DC motorlardır.
Adres Yolu (Address Bus) Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması
 Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması") MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI
 MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI S1. Aşağıdaki eleman ya da birimlerden hangisi genel bir bilgisayar sisteminin donanımsal yapısında yer almaz? a) Mikroişlemci (CPU) b) Bellek
MIKROBILGISAYARLAR ve PIC PROGRAMLAMA TEST ÇALIŞMA SORULARI S1. Aşağıdaki eleman ya da birimlerden hangisi genel bir bilgisayar sisteminin donanımsal yapısında yer almaz? a) Mikroişlemci (CPU) b) Bellek
BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: 3.2.KOMUTLAR VE KULLANIM ÖRNEKLERİ
 BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: f : File register, Herhangi bir değişkenle tarif edilen bir saklayıcı adresi (0h-7Fh) k : Sabit değer (genellikle (0-FF arasında) d : Destination
BÖLÜM 3 3. PIC 16F8X KOMUTLARI 3.1.KULLANILAN SEMBOLLER: f : File register, Herhangi bir değişkenle tarif edilen bir saklayıcı adresi (0h-7Fh) k : Sabit değer (genellikle (0-FF arasında) d : Destination
http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm Yrd.Doç. Dr.
 http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm B Yrd.Doç. Dr. Bülent ÇOBANOĞLU PIC MİKRODENETLEYİCİ VE AİLESİ PIC, Microchip firması tarafından üretilen,
http://nptel.ac.in/courses/webcourse-contents/iit KANPUR/microcontrollers/micro/ui/Course_home3_16.htm B Yrd.Doç. Dr. Bülent ÇOBANOĞLU PIC MİKRODENETLEYİCİ VE AİLESİ PIC, Microchip firması tarafından üretilen,
PIC Mikrodenetleyicileri
 PIC Mikrodenetleyicileri Intel 1976 da 8031/51 ailesini piyasaya sürdüğünde dünyanın en popüler mikroişlemcisi olmuştu. Bu işlemci dünya üzerinde 12 den fazla firma tarafından (İntel, Phillips, Dallas,
PIC Mikrodenetleyicileri Intel 1976 da 8031/51 ailesini piyasaya sürdüğünde dünyanın en popüler mikroişlemcisi olmuştu. Bu işlemci dünya üzerinde 12 den fazla firma tarafından (İntel, Phillips, Dallas,
Bu yürütme, Prof. Dr. Hakan ÜNDİL (Bir haftalık derse ait ders notudur)
") MİKROİŞLEMCİ (MİKROPROSESÖR - CPU) NEDİR? Mikroişlemci bir programının yapmak istediği işlemleri, (hafızada bulunan komutları) sırasıyla ile işleyerek icra eder (yürütür). Bu yürütme, 1. Komutun Program
MİKROİŞLEMCİ (MİKROPROSESÖR - CPU) NEDİR? Mikroişlemci bir programının yapmak istediği işlemleri, (hafızada bulunan komutları) sırasıyla ile işleyerek icra eder (yürütür). Bu yürütme, 1. Komutun Program
Haftalık Ders Saati Okul Eğitimi Süresi
 DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
8 Ledli Havada Kayan Yazı
 8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
8 Ledli Havada Kayan Yazı Hazırlayan Eyüp Özkan Devre Şemasının ISIS Çizimi Devre şemasından görüldüğü gibi PIC16F84A mikro denetleyicisinin Port B çıkışlarına 8 adet LED ve dirençler bağlı. 4MHz lik kristal
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
1. Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
Mikroişlemci Nedir? Mikrodenetleyici Nedir? Mikroişlemci iç yapısı Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
Mikroislemci Kontrollu Prototip Trafik Lambalari ve Geri Sayici
 Mikroislemci Kontrollu Prototip Trafik Lambalari ve Geri Sayici Mahmut KISACIK ve Doç.Dr. Hasan KÖMÜRCÜGIL Bilgisayar Mühendisligi Bölümü, Dogu Akdeniz Üniversitesi Gazimagusa-Kuzey Kibris Türk Cumhuriyeti
Mikroislemci Kontrollu Prototip Trafik Lambalari ve Geri Sayici Mahmut KISACIK ve Doç.Dr. Hasan KÖMÜRCÜGIL Bilgisayar Mühendisligi Bölümü, Dogu Akdeniz Üniversitesi Gazimagusa-Kuzey Kibris Türk Cumhuriyeti
Bir mikroişlemci temel olarak üç kısımdan oluşur. Bunlar merkezi işlem birimi (CPU), giriş çıkış birimi (G/Ç) ve bellektir.
, giriş çıkış birimi (G/Ç) ve bellektir.") 1 1.GİRİŞ 1.1 Mikroişlemciler Mikroişlemci herhangi bir sistemde merkezi işlem birimidir ve bulunduğu sistemde aritmetik ve mantıksal işlemleri yürütür. Merkezi İşlem Birimi (Central Processing Unit: CPU),
1 1.GİRİŞ 1.1 Mikroişlemciler Mikroişlemci herhangi bir sistemde merkezi işlem birimidir ve bulunduğu sistemde aritmetik ve mantıksal işlemleri yürütür. Merkezi İşlem Birimi (Central Processing Unit: CPU),
Çizgi İzleyen Robot Yapımı
 Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
Çizgi İzleyen Robot Yapımı Elektronik Elektronik tasarım için yapılması gerek en önemli şey kullanılacak malzemelerin doğru seçilmesidir. Robotun elektronik aksamı 4 maddeden oluşur. Bunlar; 1. Sensörler
MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil Bahar
 Prof. Dr. Hakan Ündil Bahar") MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil 2016-2017 Bahar (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 6. BÖLÜM - ALT PROGRAMLAR Program içerisinde
MİKRO DENETLEYİCİLER II DERS NOTLARI (Vize) Prof. Dr. Hakan Ündil 2016-2017 Bahar (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 6. BÖLÜM - ALT PROGRAMLAR Program içerisinde
PIC16F877A nın Genel Özellikleri
 BÖLÜM 3 PIC16F877A nın Genel Özellikleri 3.1 Mikrodenetleyici Mimarisi 3.2 PIC16Fxxx Komut Seti 3.3 PIC16F877A Bellek Organizasyonu 3.4 Giriş/Çıkış Portları 3.5 STATUS ve TRIS Kaydedicileri 3.6 Kesme ve
BÖLÜM 3 PIC16F877A nın Genel Özellikleri 3.1 Mikrodenetleyici Mimarisi 3.2 PIC16Fxxx Komut Seti 3.3 PIC16F877A Bellek Organizasyonu 3.4 Giriş/Çıkış Portları 3.5 STATUS ve TRIS Kaydedicileri 3.6 Kesme ve
PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI
 P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
P I C 1 6 F 8 4 / P I C 1 6 F 8 7 7 K O M U T S E T İ PIC MIKRODENETLEYICILER-3: GECĠKME ve KESME PROGRAMLARI Hazırlayan:Öğr.Gör.Bülent ÇOBANOĞLU 1 Gecikme Programları Örnek 1: Tek bir döngü ile yaklaģık
5.Eğitim E205. PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628:
 5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
5.Eğitim E205 PIC16F628 ve PIC16F877 Hakkında Genel Bilgi IF THEN ELSE ENDIF HIGH-LOW GOTO-END- PAUSE Komutları Tanıtımı ve Kullanımı PIC16F628: PIC16F628 18 pine sahiptir.bu pinlerin 16 sı giriş / çıkış
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI
 PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
PIC16F87X te ADC MODÜLÜNÜN KULLANIMI Emre YAVUZ Temmuz 2009 PIC16F87X te ADC MODÜLÜ Ü KULLA IMI Bu makalemizde PIC16F87X serisi mikrodenetleyicilerde ADC modülünün temel düzeyde kullanımını anlatacağım.
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİYLE ANALOG İŞLEMLER 523EO0022 Ankara, 2012 I Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
 ve Z BAYRAĞI") MİKRO DENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan Ündil 2015-2016 Bahar-Vize (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
MİKRO DENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan Ündil 2015-2016 Bahar-Vize (MİKRODENETLEYİCİLER I DERS NOTLARI nın devamıdır. Sadece VİZE için olan kısımdır) 5. BÖLÜM - DÖNGÜ (ÇEVRİM) ve Z BAYRAĞI
MEB YÖK MESLEK YÜKSEKOKULLARI PROGRAM GELİŞTİRME PROJESİ. 1. Tipik bir mikrobilgisayar sistemin yapısı ve çalışması hakkında bilgi sahibi olabilme
 PROGRAMIN ADI DERSIN KODU VE ADI DERSIN ISLENECEGI DÖNEM HAFTALIK DERS SAATİ DERSİN SÜRESİ ENDÜSTRİYEL ELEKTRONİK MİK.İŞLEMCİLER/MİK.DENETLEYİCİLER-1 2. Yıl, III. Yarıyıl (Güz) 4 (Teori: 3, Uygulama: 1,
PROGRAMIN ADI DERSIN KODU VE ADI DERSIN ISLENECEGI DÖNEM HAFTALIK DERS SAATİ DERSİN SÜRESİ ENDÜSTRİYEL ELEKTRONİK MİK.İŞLEMCİLER/MİK.DENETLEYİCİLER-1 2. Yıl, III. Yarıyıl (Güz) 4 (Teori: 3, Uygulama: 1,
BSF STATUS,5 ;bank1 e geçiş CLRF TRISB ;TRISB=00000000 BCF STATUS,5 ;bank0 a geçiş
 +5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
+5V ĠġĠN ADI: PORTB DEKĠ LEDLERĠN ĠSTENĠLENĠ YAKMAK/SÖNDÜRMEK GND C F C F X R 5 U OSC/CLKIN RA0 OSC/CLKOUT RA RA RA RA/T0CKI PICFA RB RB RB RB RB RB 0 R R R R5 R R R R D D D D D5 D D D INCLUDE CONFIG P=FA
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - başla - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - başla - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic
Mikro denetleyicili Uygulama devresi bileşenleri
 Mikro denetleyicili Uygulama devresi bileşenleri Bir PIC mikro denetleyici ile uygulama gerçekleştirebilmek için ; Besleme devresi, Reset sinyali, Osilatör devresi, Uygulama devresi elemanlarına İhtiyaç
Mikro denetleyicili Uygulama devresi bileşenleri Bir PIC mikro denetleyici ile uygulama gerçekleştirebilmek için ; Besleme devresi, Reset sinyali, Osilatör devresi, Uygulama devresi elemanlarına İhtiyaç
BİLİŞİM TEKNOLOJİLERİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİ Ankara, 2014 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya
T.C. MİLLÎ EĞİTİM BAKANLIĞI BİLİŞİM TEKNOLOJİLERİ MİKRODENETLEYİCİ Ankara, 2014 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI. öğrencilerine eğitimleri esnasında iş hayatında karşılaşabilecekleri kontrol işlemleri ve
 MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
MİKRODENETLEYİCİ GELİŞTİRME SETİ TASARIM VE UYGULAMALARI Muciz ÖZCAN 1 Hidayet GÜNAY 2 1 Selçuk Üniversitesi KONYA 2 MPG Makine Prodüksiyon Grubu Arge- Müh. KONYA Özet Haberleşme, Elektronik, Kontrol ve
Komutların İşlem Süresi
 Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
Komutların İşlem Süresi PIC lerde ŞARTSIZ dallanma komutları (GOTO, CALL, RETURN gibi ) hariç tüm Assembly dili komutları 1 saat saykılı (cycle) çeker. ŞARTLI dallanma komutları ise normalde 1 saat saykılı
B.Ç. / E.B. MİKROİŞLEMCİLER
 1 MİKROİŞLEMCİLER Mikroişlemci (Mikroprocessor) Nedir? Merkezi İşlem Birimi, (CPU Central Processing Unit) olarak adlandırılır. Bilgisayar programının yapmak istediği işlemleri yürütür. CPU belleğinde
1 MİKROİŞLEMCİLER Mikroişlemci (Mikroprocessor) Nedir? Merkezi İşlem Birimi, (CPU Central Processing Unit) olarak adlandırılır. Bilgisayar programının yapmak istediği işlemleri yürütür. CPU belleğinde
ONDOKUZ MAYIS ÜNİVERSİTESİ
 ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ MİKROİŞLEMCİLER LABORATUVARI PİC UYGULAMA NOTLARI BÖLÜM 1. 1.1 16F84 Mickrodenetleyicisi: PIC16F84 18 pinli bir mikrodenetleyicidir.
ONDOKUZ MAYIS ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ MİKROİŞLEMCİLER LABORATUVARI PİC UYGULAMA NOTLARI BÖLÜM 1. 1.1 16F84 Mickrodenetleyicisi: PIC16F84 18 pinli bir mikrodenetleyicidir.
MİKROİŞLEMCİ (MİKROPROSESÖR - CPU) NEDİR? Prof. Dr. Hakan ÜNDİL (Bir haftalık derse ait ders notudur)
 NEDİR? Prof. Dr. Hakan ÜNDİL (Bir haftalık derse ait ders notudur)") MİKROİŞLEMCİ (MİKROPROSESÖR - CPU) NEDİR? Prof. Dr. Hakan ÜNDİL (Bir haftalık derse ait ders notudur) Mikroişlemci bir programının yapmak istediği işlemleri, (hafızada bulunan komutları) sırasıyla ile
MİKROİŞLEMCİ (MİKROPROSESÖR - CPU) NEDİR? Prof. Dr. Hakan ÜNDİL (Bir haftalık derse ait ders notudur) Mikroişlemci bir programının yapmak istediği işlemleri, (hafızada bulunan komutları) sırasıyla ile
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-4 Ankara 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ
 İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ DENİZ SUYU TERMOMETRESİ BİTİRME ÖDEVİ OĞUZHAN KIZILBEY 040010159 Bölümü : Elektronik ve Haberleşme Mühendisliği Programı : Elektronik Mühendisliği
İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ DENİZ SUYU TERMOMETRESİ BİTİRME ÖDEVİ OĞUZHAN KIZILBEY 040010159 Bölümü : Elektronik ve Haberleşme Mühendisliği Programı : Elektronik Mühendisliği
Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Dinleme ve anlamlandırma
 Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Ders Dinleme ve anlamlandırma Standart derslik teknolojileri, çoklu ortam araçları, projektör, bilgisayar DERS BİLGİLERİ Ders
Eğitim - Öğretim Yöntemleri Başlıca öğrenme faaliyetleri Kullanılan Araçlar Ders Dinleme ve anlamlandırma Standart derslik teknolojileri, çoklu ortam araçları, projektör, bilgisayar DERS BİLGİLERİ Ders
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL Bahar-FİNAL KISMI
 MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2016-2017 Bahar-FİNAL KISMI (NOT: Derslerde işlenen diğer örnekler, Lab. Deneyi ve Sayı Sistemleri de Final sınavına dahildir) BÖLÜM 7 - LOJİK
MİKRODENETLEYİCİLER II DERS NOTLARI Prof. Dr. Hakan ÜNDİL 2016-2017 Bahar-FİNAL KISMI (NOT: Derslerde işlenen diğer örnekler, Lab. Deneyi ve Sayı Sistemleri de Final sınavına dahildir) BÖLÜM 7 - LOJİK
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ AKILLI EV ALETLERİNİN MİKRODENETLEYİCİLER İLE KONTROLÜ 522EE0112 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ AKILLI EV ALETLERİNİN MİKRODENETLEYİCİLER İLE KONTROLÜ 522EE0112 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan
EasyPic 6 Deney Seti Tanıtımı
 EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE ANALOG İŞLEMLER ANKARA 2007 Milli Eğitim Bakanlığı
Hyper Terminal programı çalıştırıp Uygun COM portu ve iletişim parametrelerinin ayarları yapılıp bekletilmelidir.
 DENEY 1: PIC 16F84 DEN BİLGİSAYARA VERİ GÖNDERME Bu uygulamada verici kısım PIC16F84, alıcı kısım ise bilgisayardır. Asenkron iletişim kurallarına göre her iki tarafta aynı parametreler kullanılacaktır.
DENEY 1: PIC 16F84 DEN BİLGİSAYARA VERİ GÖNDERME Bu uygulamada verici kısım PIC16F84, alıcı kısım ise bilgisayardır. Asenkron iletişim kurallarına göre her iki tarafta aynı parametreler kullanılacaktır.
Mikroişlemcili Sistemler ve Laboratuvarı
 SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Hafta04 : 8255 ve Bellek Organizasyonu Doç.Dr. Ahmet Turan ÖZCERİT
SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Hafta04 : 8255 ve Bellek Organizasyonu Doç.Dr. Ahmet Turan ÖZCERİT
PIC'LERIN DIŞ GÖRÜNÜŞÜ...Hata! Yer işareti tanımlanmamış.
 INDEX Sayfa GĐRĐŞ...HATA! YER ĐŞARETĐ TANIMLANMAMIŞ. MĐKROĐŞLEMCĐ NEDĐR?...Hata! Yer işareti tanımlanmamış. MĐKRODENETLEYĐCĐ NEDĐR?...Hata! Yer işareti tanımlanmamış. Neden Mikroişlemci Değil de Mikrodenetleyici
INDEX Sayfa GĐRĐŞ...HATA! YER ĐŞARETĐ TANIMLANMAMIŞ. MĐKROĐŞLEMCĐ NEDĐR?...Hata! Yer işareti tanımlanmamış. MĐKRODENETLEYĐCĐ NEDĐR?...Hata! Yer işareti tanımlanmamış. Neden Mikroişlemci Değil de Mikrodenetleyici
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-3 ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ MİKRODENETLEYİCİ-3 ANKARA 2007 Milli Eğitim Bakanlığı tarafından geliştirilen
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2
 T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
T.C. MİLLÎ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ 2 ANKARA 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE DİJİTAL İŞLEMLER 523EO0021 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MİKRODENETLEYİCİ İLE DİJİTAL İŞLEMLER 523EO0021 Ankara, 2012 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında
3.2 PIC16F84 Yazılımı PIC Assembly Assembler Nedir?
 3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
3.2 PIC16F84 Yazılımı 3.2.1 PIC Assembly 3.2.1.1 Assembler Nedir? Assembler,bir text editöründe assembly dili kurallarına göre yazılmış olan komutları pıc in anlayabileceği heksadesimal kodlara çeviren
MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final
 MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
MİKROİŞLEMCİLER VE MİKRO DENETLEYİCİLER 2 DERS NOTLARI Prof. Dr. Hakan Ündil 2013-2014 Bahar-Final BÖLÜM 7 - LOJİK İŞLEM KOMUTLARI 7.1. RLF Komutu (Bir bit Sola Kaydırma) Bir file register içinde bulunan
3 Fazlı Motorların Güçlerinin PLC ile Kontrolü. Doç. Dr. Ramazan BAYINDIR
 3 Fazlı Motorların Güçlerinin PLC ile Kontrolü Doç. Dr. Ramazan BAYINDIR Endüstride çok yaygın olarak kullanılan asenkron motorların sürekli izlenmesi ve arızalarının en aza indirilmesi büyük önem kazanmıştır.
3 Fazlı Motorların Güçlerinin PLC ile Kontrolü Doç. Dr. Ramazan BAYINDIR Endüstride çok yaygın olarak kullanılan asenkron motorların sürekli izlenmesi ve arızalarının en aza indirilmesi büyük önem kazanmıştır.
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA hbozkurt@mekatroniklab.com www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC Programlama. Devrim Çamoğlu
 PIC Programlama Devrim Çamoğlu İçİndekİler XIII İçİndekİler 1. Bölüm - Temel Kavramlar Mikrodenetleyici Tanımı Mikroişlemci-Mikrodenetleyici 1. Mikro İşlemcili Bir Sistemde Kavramlar 2. Tasarım Felsefesi
PIC Programlama Devrim Çamoğlu İçİndekİler XIII İçİndekİler 1. Bölüm - Temel Kavramlar Mikrodenetleyici Tanımı Mikroişlemci-Mikrodenetleyici 1. Mikro İşlemcili Bir Sistemde Kavramlar 2. Tasarım Felsefesi
İŞLEMCİLER (CPU) İşlemciler bir cihazdaki tüm girdilerin tabii tutulduğu ve çıkış bilgilerinin üretildiği bölümdür.
 İşlemciler bir cihazdaki tüm girdilerin tabii tutulduğu ve çıkış bilgilerinin üretildiği bölümdür.") İŞLEMCİLER (CPU) Mikroişlemci Nedir? Mikroişlemci, hafıza ve giriş/çıkış birimlerini bulunduran yapının geneline mikrobilgisayar; CPU' yu bulunduran entegre devre çipine ise mikroişlemci denir. İşlemciler
İŞLEMCİLER (CPU) Mikroişlemci Nedir? Mikroişlemci, hafıza ve giriş/çıkış birimlerini bulunduran yapının geneline mikrobilgisayar; CPU' yu bulunduran entegre devre çipine ise mikroişlemci denir. İşlemciler
1. PROGRAMLAMA. PDF created with pdffactory Pro trial version www.pdffactory.com
 . PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
. PROGRAMLAMA UTR-VC Windows altında çalışan konfigürasyon yazılımı aracılığıyla programlanır. Programlama temel olarak kalibrasyon, test ve giriş/çıkış aralıklarının seçilmesi amacıyla kullanılır. Ancak
Deniz Elektronik Laboratuvarı www.denizelektronik.com Tel:0216-348 65 21 D7220_RV4
 STEREO FM VERİCİ delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 D7220_RV4 7-2008-5-2010-2-2011 REV4 PC üzerinden frekans ve kişisel bilgi kaydı. RS232 ve RDS sistem girişli.stereo-mono seçme özellikli,yüksek
STEREO FM VERİCİ delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 D7220_RV4 7-2008-5-2010-2-2011 REV4 PC üzerinden frekans ve kişisel bilgi kaydı. RS232 ve RDS sistem girişli.stereo-mono seçme özellikli,yüksek
PIC MİKRODENETLEYİCİ KULLANARAK BİR SİSTEMİN TELEFONLA UZAKTAN KONTROLÜ
 T.C. FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PIC MİKRODENETLEYİCİ KULLANARAK BİR SİSTEMİN TELEFONLA UZAKTAN KONTROLÜ BİTİRME ÖDEVİ HAZIRLAYANLAR Serkan İNAL ve
T.C. FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ PIC MİKRODENETLEYİCİ KULLANARAK BİR SİSTEMİN TELEFONLA UZAKTAN KONTROLÜ BİTİRME ÖDEVİ HAZIRLAYANLAR Serkan İNAL ve
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ AKILLI EV ALETLERİNİN MİKRODENETLEYİCİLER İLE KONTROLÜ ANKARA 2007 Milli
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ AKILLI EV ALETLERİNİN MİKRODENETLEYİCİLER İLE KONTROLÜ ANKARA 2007 Milli
Bank değiştirme Bir banktan diğerine geçmek için STATUS register denilen özel registerin 5. ve 6. bitinin durumunu değiştirmek gerekir.
 File register haritası Bank 0 Bank 1 0 00 INDF 0 80 INDF 0 01 TNF0 0 81 OPTION 0 02 PCL 0 82 PCL 0 03 STATUS 0 83 STATUS 0 04 FSR 0 84 FSR 0 05 PORT A 0 85 TRISA 0 06 PORT B 0 86 TRISB 0 07 0 87 EEPROM
File register haritası Bank 0 Bank 1 0 00 INDF 0 80 INDF 0 01 TNF0 0 81 OPTION 0 02 PCL 0 82 PCL 0 03 STATUS 0 83 STATUS 0 04 FSR 0 84 FSR 0 05 PORT A 0 85 TRISA 0 06 PORT B 0 86 TRISB 0 07 0 87 EEPROM
BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR?
 0 BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR? Programlamada döngü kadar etkili bir diğer kullanım şekli de alt programlardır. Bu sistemde işlemin birkaç yerinde lazım olan bir program parçasını tekrar
0 BÖLÜM 1 ALT PROGRAMLAR 1.1.ALTPROGRAM NEDİR? Programlamada döngü kadar etkili bir diğer kullanım şekli de alt programlardır. Bu sistemde işlemin birkaç yerinde lazım olan bir program parçasını tekrar
MİKROİŞLEMCİ (Microprocessor) NEDİR?
 NEDİR?") MİKROİŞLEMCİ (Microprocessor) NEDİR? Merkezi İşlem Birimi, (CPU Central Processing Unit) olarak adlandırılır. Bilgisayar programının yapmak istediği işlemleri yürütür.(yerine getirir) CPU belleğinde bulunan
MİKROİŞLEMCİ (Microprocessor) NEDİR? Merkezi İşlem Birimi, (CPU Central Processing Unit) olarak adlandırılır. Bilgisayar programının yapmak istediği işlemleri yürütür.(yerine getirir) CPU belleğinde bulunan