Güvenlik Notları Bu bölümde,kullanıcının ürünü aldıktan sonra uyması gereken güvenlik önlemleri ile ilgili bilgilere ulaşabilirsiniz.
|
|
|
- Duygu İnönü
- 8 yıl önce
- İzleme sayısı:
Transkript
1

2 Güvenlik Notları Bu bölümde,kullanıcının ürünü aldıktan sonra uyması gereken güvenlik önlemleri ile ilgili bilgilere ulaşabilirsiniz. Tehlikeler Giriş Gücü Sürücünün giriş gücü AC220V tur. Makine çalışmaya başladığında,motor acil durumda duracak şekilde konumlandırılmalıdır. Aksi takdirde bireysel yaralanmalar ve mekanik hatalar ortaya çıkabilir. Güç verildiğinde güç beslemesinin terminal blokları topraklanmalıdır. Aksi takdirde,elektrik şokları görülebilir. Güç kapatıldıktan sonra veya voltaj direnci ölçümünden sonra,charge ledi yanıyorsa,güç kaynağı terminallerine dokunmayınız. Aksi takdirde,elektrik şokları görülebilir. Lütfen prosedür ve komutlara göre deneme testini gerçekleştiriniz. Servo motorun ilk makineye takıldığında herhangi bir sorun olmaması veya herhangi bir yaralanmaya sebep olmaması için deneme testi yapılmalıdır. Ürünle ilgili herhangi bir değişiklik yapmayaınız.sadece üretici firma değişiklik yapabilir. Aksi takdirde, yaralanma,mekanik hata veya yangın görülebilir. Makine tarafında acil stop bulundurulması şarttır. Servo motorda bulunana fren güvenliğin sağlanması anlamına gelmez. Aksi takdirde yaralanmalar görülebilir. Lütfen servo sürücünün toprak terminalinin toprağa bağlı olduğundan emin olunuz. (servo sürücünün toprak direnci giriş gücü 100Ω dan azdır). Aksi takdirde elektrik şokları veya yangın görülebilir. Konumlandırma için Notlar Ürün aşağıda olduğu gibi konumlandırılmamalıdır. Aksi takdirde,elektrik şoku,yangın veya makinede sıkıntı görülebilir. Direk güneş ışığı alan yerlere Sıcaklık normal değerlerin üstüne çıktığı durumlarda Nem değerleri normalin dışında olduğunda Korozif gazlar ve yanıcı gazların olduğu ortam Kir,toz,metalin paslanması gibi durumlarda Nemlenmeye eğilimli,yağlı ve kimyasal ortam Gürültünün çok olduğu ortam Lütfen kabloyu sıkarak tutmayınız veya motor şaftını ellemeyiniz. Aksi takdirde,kişisel yaralanmalara veya makine hatalarına neden olabilir.

3 Yükleme için Notlar Lütfen havalandırmayı kapatacak bir kurulum yapmayınız. Aksi takdirde,iç malzemeler eskiyebilir ve yangına neden olabilir. Lütfen kurulum talimatını inceleyiniz. Aksi takdirde,hataya neden olabilir. Yükleme sırasında,lütfen servo sürücü ile diğer düzenekler arasındaki boşluğa dikkat ediniz. Aksi takdirde yangına veya makine hatasına neden olabilir. Lütfen makinenin üstüne büyük güçler uygulamayınız. Aksi takdirde makine bozulabilir. Kablolama için Notlar Lütfen kabloları doğru ve güvenilir bağlayınız. Aksi takdirde,motor kontrolden çıkabilir,yaralanmalara neden olabilir veya makinede hata çıkabilir. Lütfen ticari güç kaynaklarını servo sürücünün U,V,W uçlarına bağlamayınız. Aksi takdirde,kişisel yaralanmalara veya yangına sebep olabilir. Lütfen güç kablosunun terminallerini sıkıca bağlayınız.. Aksi takdirde,yangın çıkabilir. Lütfen ana devre kablosunu grişi çıkış sinyalinden 30cm uzağa yerleştiriniz. Giriş çıkış ve enkoder kabloları çift demetli ekranlı kablolardan yapılmalıdır Giriş-çıkış kablosunun sinyal uzunluğu maximum 3 metre,enkoder ise max. 30 metre olmalıdır.güç kapansa bile servo sürücüde voltaj indüklenebilir.lütfen servo sürücüye CHARGE ledi sönene kadar dokunmayınız. Lütfen,harici kablolamanın kısa devre olması durumu için devre kesici gibi devre koruma elemanlarını kullanmayınız. Aksi takdirde yangına sebep olabilir. Aşağıdaki durumlarda ekranlamanın doğru yapıldığından emin olunuz. Statik elektrik parazitinin olabileceği yerler Yüksek velektrik alanı ve voltajın olduğu yerler Radyoaktif ışınların olduğu yerler Aksi takdirde makine bozulabilir. Bataryayı takarken kutuplarına dikkat ediniz. Aksi takdirde,bataryaların patlamasına veya servo sürücü ve motorun zarar görmesine sebep olabilir.

4 Uygulama Notları Kazaları önlemek adına,lütfen deneme uygulamasını uygulayınız. Servo mototru deneme sürüşü yaptıktan sonra makineye monte ediniz.aksi takdirde yarlanmalara neden olabilir. Makineye doğru olarak bağlamadan önce parametrelerin doğru olarak ayarlandığına emin olunuz. Makine parametre ayarı yapılmadan çalıştırılırsa kazaya veya hataya neden olabilir. Lütfen gücü sıklıkla açıp kapatmayınız. Çünkü gücün sıkılıkla açılıp kapanması servo sürücüdeki kapasitörün yüksek akım çekmesinden dolayı içindeki komponentlere zarar vermesi sıklaşır. JOG operasyonu(af02) ve manuel yük atalet algılama sırasında(af15), lütfen acil stopun pozitif ve negative dönme tarafında overtravel varken inaktif olabileceğine dikkat ediniz. Aksi takdirde,makinede sıkıntı olabilir. Dikey eksende kullanılırken,fren kullanmayı unutmayınız ve overtravel durumunda makineye homing yaptırınız. Aksi takdirde,overtravel durumunda servo motor düşebilir. Makine çalışırken yapılcak ekstrem parametre değişikleri motorun stabil çalışmasını engelleyebilir. Bu durumda makine bozulabilir ve yaralanmalar görülebilir. Eğer alarm varsa,nedenini öğreniniz ve çözümü uygulayınız,daha sonra alarmı resetleyiniz. Aksi takdirde yaralanmalara veya makinenin bozulmasına neden olacaktır. Servo motorun frenini normal fren olarak kullanmayınız Aksi takdirde makine hataya geçebilir. Uygun servo motor ve servo sürücü seti kullanılmalıdır. Aksi takdirde,yangına veya makinenin bozulmasına sebep olabilir. Bakım İçin Notlar Lütfen makine açıkken bağlantıları değiştirmeyiniz. Aksi takdirde,elektrik şokları veya yaralanmalar görülebilir. Lütfen servo sürücü değiştirirken içindeki parametreleri kopyalayıp yeni sürücüye atınız Aksi takdirde makine bozulabilir. Diğer Notlar Bu manuelde topraklama ve koruma önlem cihazlarından detaylı bahsedilmemiştir.bu elemanların doğru konumlandırıp ve toprağın sağlam olduğundan emin olduktan sonra çalıştırınz. Bu manueldeki görseller gerçekten farklı olabilir.
 ve manuel yük atalet algılama sırasında(af15), lütfen acil stopun pozitif ve negative dönme tarafında overtravel varken inaktif olabileceğine dikkat ediniz.")
5 Diğer Notlar Gerekli güvenlik önleminin alınmadığı durumlarda oluşacak sorunlardan firmamız sorumlu tutulamaz. Bu manuelde yer alan bilgiler genel bilgidir,her zman pratikte karşılığı olmayabilir. Bu manuel, orjinal dilin İngilizce çevrisine dayanılarak çevrilmiştir.herhangi bir çeviri hatasından şirketimiz sorumlu tutulamaz.herhangi bir yanlışlıkta orjinal dil esas alınmalıdır.

6 İçindekiler Güvenlik Notları... 1 Bölüm 1 Ürün Tanıtımı Ürüne Bakış Ürün modeli Etiket Tanımı Model Tanımı Servo Sürücü Tanımı Bakım ve Denetleme Chapter II Montaj Montaj Yönü ve Yeri Önerilen Devre Kesici ve Yeri Yüksek Harmonik ve Gürültülere Karşı Önlem Gürültü filtresinin montajı AC/DC reaktörün Yüksek Harmoniklerden Korunma Bağlantısı Rejeneratif Direnç Seçimi Chapter III Kablolama Sistem Yapısı ve Kablolama Servo Sistem Yapısı Connector and terminal of driver Ana devre Kablosu Motor Tarafında Kablolama Motor Enkoderin Bağlanti Terminallerinin Görünümü Ve Anlamları Motor Güç Bağlanti Terminallerinin Görünümü Ve Anlamları CN1 konnektörünün bağlantıları Terminal görünümü CN2 konnektörünün bağlantıları CN2 konnektörü CN2 konnektörünün Sinyallerinin Anlamları I/O sinyal dağıtımı Kontrolcü Bağlantısı Örnekleri... 32

7 3.5 CN3 konnektörünün Bağlantısı CN3 konnektörünün Bağlantıları CN3 konnektör bağlantısı örneği Standard kablolama modu Pozisyon kontrol bağlantısı örneği Hız kontrol bağlantısı örneği Tork kontrol bağlantısı örneği Chapter IV Panel Yönetimi Panel Fonksiyon Değiştirme Durum Görüntüleme Monitor görüntüleme (DP ) İçerik Görüntüleme Görüntüleme Örneği Parametre Modu İlgili Komutlar Parametre Ayarı Örneği (PA ) Ek Fonksiyonların Özelliği(AF ) Ek Fonksiyon İçeriği Ek Fonksiyon Örneği (AF ) Parametre Değer Atama Parametre değeri atama Parametre Seçim Fonksiyonu Yazımı Chapter V Monitor Göstericisi Monitor Göstericisine Bakış Monitör Gösterim İşlem Örneği Giriş Sinyali Görüntüleme Prosedür Görüntüleme Görüntünün Değerlendirilme Modu Görüntü Örneği Çıkış Sinyali Görüntüleme Prosedür Görüntüleme Görüntü Değerlendirilme Modu... 54
... 48 4.7 Parametre Değer Atama... 48 4.7.1 Parametre değeri atama... 48 4.7.2 Parametre Seçim Fonksiyonu Yazımı.")
8 5.4.3 Görüntü Örneği Güç Tekrar verildiğinde Görüntüleme Diğer Notlar Chapter VI Ek Fonksiyonlar Ek Fonksiyonlara Bakış Alarm Günlüğünün Gösterilmesi (AF 00) Pozisyon Tanımlama(AF 01) JOG operasyonu(af 02) Ön Panel Kilidi(AF 03) Alarm Günlüğü Silme (AF 04) Parametre Sıfırlama (AF 05) Offset Komutun Otomatik Kalibrasyonu (AF 06) Hız komut offsetinin elle ayarlanması (AF 07) Tork komut offsetinin elle ayarlanması (AF 08) Motor Modeli Görüntüleme (AF 09) Servo sürücünün yazılım modelini görüntüleme (AF 10) Mutlak enkoder değeri ayarlama (AF 11) Yük Ataletinin Manuel Algılanması (AF 15) Chapter VII Test Uygulaması Test uygulamasından önce dikkat edilmesi gereken denetlemeler ve hususlar JOG operasyonunu panelden yönetmek Servo Motorların PLC veya Motion Kontrolcüyle Çalışma Uygulaması Giriş sinyal döngüsünün bağlantısı ve durum(status) doğrulama Pozisyon Kontrolüyle Test Uygulaması Hız kontrolüyle Test Uygulaması Servo Motorun Makine ile Test Uygulaması Frenli Servo Motor Test Uygulaması Bölüm VIII İşleyiş Kontrol Modu Seçimi Genel Basit Fonksiyonların Ayarları Servo AKTİF ayarı Motor dönüş yönünün değiştirilmesi Overtravel Ayarı... 73
... 63 6.13 Mutlak enkoder değeri ayarlama (AF 11)... 64 6.14 Yük Ataletinin Manuel Algılanması (AF 15)... 64 Chapter VII Test Uygulaması... 66 7.")
9 8.2.4 Fren Ayarları Servo PASİF iken durma için metod seçimi Güç kaynağı kesme ayarı Mutlak Enkoder Kullanma Metodu Mutlak enkoder seçimi Batarya Kullanma Metodu Batarya değişimi AF011 Mutlak Enkoder Ayarı Pozisyon Kontrol İşlemi Kullanıcı parametresi ayarları Elektronik Dişli Pozisyon Komutu Pozisyon tamamlama sinyali (COIN) Pozisyonlama Yakın Sinyali (NEAR) Komut Pulse Engelleme Fonksiyonu (INHIBIT ) Hız Kontrol(Analog Voltaj Komutu) İşlemi Kullanıcı Parametre Ayarları Giriş Sinyal Ayarı Instruction offset adjustment Soft start Hız komut Filtresi Sıfır Clamp Fonksiyonun Kullanımı Enkoder Sinyal Çıkışı Aynı Hız Test ve Çıkış Tork Kontrol İşlemi Kullanıcı Parametre Ayarı Tork Komut Girişi Offset ayarlama Tork Kontrolde Hız Limiti Hız Kontrol (dahili hız seçimi ayarı) İşlemi Kullanıcı Parametre Ayarı Giriş Sinyal Ayarı Kontrol Mod Kombinasyonu Seçimi

10 Kullanıcı Parametre Ayarı Kontrol Mod Değiştirme Komutu Chapter X Hata Tanılama Alarm Listesi Hata sebepleri Uyarı Listesi Uyarı Sebepleri ve Çözümü Chapter XI Özellikler Servo Sürücü Özellikleri Temel Özellikler Hız,Pozisyon ve tork Kontrol Özellikleri Servo motor özellikleri /80 serisi servo motorların Parametre listesi serisi servo motorların Parametre listesi Servo Sürücünün Boyutları EPS-0D20A, EPS-0D40A (A Tipi Kasa) EPS-0D75A, EPS-0001A, EPS-01D5A (B Tipi Kasa) Servo Motor Boyutları /80 serisi motorların montaj boyutları: Birim (mm) serisi motorların montaj boyutları: Birim (mm) Chapter XII EK Motor Modlarının Listesi Ek Fonksiyonların Listesi Kullanıcı Parametrelerinin Listesi Kullanıcı Parametrelerinin Görüntüleme Modları Parametre Seçim Görüntüleme Modları
... 118 11.4 Servo Motor Boyutları... 119 11.4.1 60/80 serisi motorların montaj boyutları: Birim (mm)... 119 11.4.2 130 serisi motorların montaj boyutları: Birim (mm).")
11 BÖLÜM-I ÜRÜN TANITIMI 1.1 Ürüne Bakış Aşağıdaki tabloda bulunan maddeleri satın alma ve nakliye sırasındaki ihmallere karşı dikkatle kontrol ediniz. Doğrulanacak durum Referans Motor ve sürücünün isim levhalarını üzerindeki Alınan ürünün,sipariş edilen ürün olup ürün kodlarını kontrol ediniz. olmadığını Motorun şaftının rahatça dönüp dönmediğini Yüzeysel bir bozukluk olup olmadığını Gevşek bir vida olup olmadığını Rotor milini(şaftını) dönderiniz.rahatça dönüyorsa rotorun mili sorunsuzdur.elektromanyetik frenin elle döndürülemeyeceğini unutmayınız! Yüzeyde bir bozukluk olup olmadığını görsel olarak kontrol ediniz. Servo sürücünün vidalarının gevşek olup olmadığını tornavida ile kontrol ediniz. Yukarıdaki durumların görülmesi halinde sorunların çözümü için üretici veya distribitörle temasa geçiniz. Servo seti aşağıdaki parçaları içerir. No. Referans 1 Servo sürücü ve servo motor ekleri Motor güç kablosu: 2 Sürücü ve motorun ucundaki güç soketi (standart kurulum) veya bir UVW motor güç kablosu(isteğe bağlı) Motor enkoder kablosu: 3 Sürücünün ucundaki enkoder fişi veya motorun ucundaki enkoder fişi (standart kurulum) veya enkoder sinyal kablosu (isteğe bağlı) 4 CN1için RJ45 eki, RS485 ve CANopen iletişimi (isteğe bağlı) 5 CN2 için 50-PIN eki(3m simulasyon ürünü) (isteğe bağlı) 6 CN3 için 20-PIN eki(3m simulasyon ürünü) (isteğe bağlı) Sürücü güç giriş fişi 7 5PIN hızlı bağlantı ucu (L1. L2. L3. L1C. L2C) Harici frenleme direnci ve DC reaktör fişi: 8 5PIN hızlı bağlantı ucu(p. D. C ) 10 1 yükleme manuel 1.2 Ürün Modeli Etiket Tanımı EPS-B1 servo sürücüsünün etiket tanıtımı

12
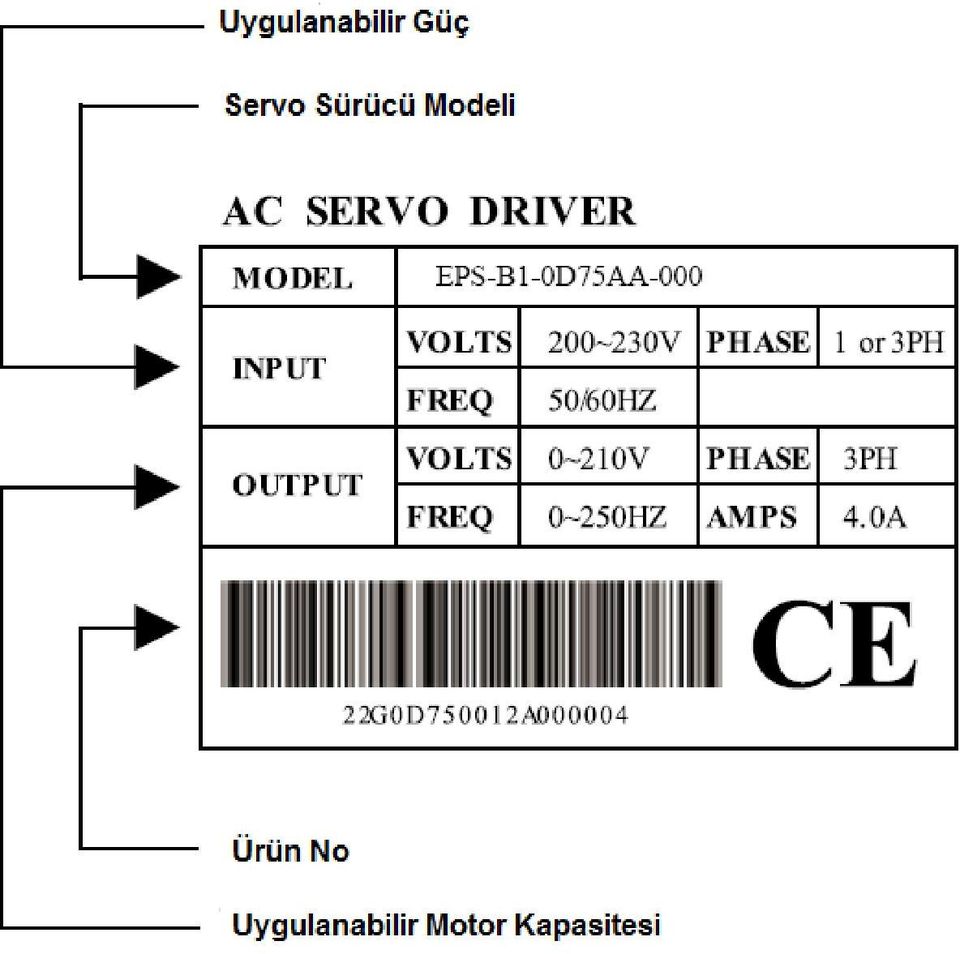
13 1.2.2 Model Tanımı EPS-B1 Servo Sürücü Tanımı [1]Servo Sürücü Serisi EPS B1 0D75 A A [2]Sürücü Gücü [1] [2] [3] [4] [5] [3]Anma Giriş Voltajı İşaret Özellik İşaret Özellik İşaret Özellik B1 B1 Serisi [4]Donanım Sürümü 0D40 400W A 220V 0D75 750W KW 01D5 1.5KW [5]Malzeme Kodu İşaret Özellik İşaret Özellik A B1 Serisi Servo motor model tanımı 130 DN MA 1 0D75 D K A M [1] [2] [3] [4] [5] [6] [7] [8] [9] [10]
![[4]Donanım Sürümü 0D40 400W A 220V 0D75 750W 0001 1.0KW 01D5 1.](/docs-images/45/1595731/images/page_13.jpg "5KW [5]Malzeme Kodu İşaret Özellik İşaret Özellik A B1 Serisi Servo motor model tanımı 130 DN MA 1 0D75")
14 [1]Flanş No [2]Ürün İsmi [3]Voltaj sınıfı İşaret Özellik İşaret Özellik İşaret Özellik Flanş DN MA Küçük/Orta Atalet 220V Flanş HA Yüksek Atalet 220V Flanş MB Küçük/Orta Atalet 380V HB Yüksek Atalet 380V [4]Dizayn Serisi [5]Nominal Güç [6]Nominal Hız İşaret Özellik İşaret Özellik İşaret Özellik 1 0D40 400W A 1000 RPM 0D75 750W B 1500 RPM KW C 2000 RPM 01D5 1.5KW D 3000 RPM E 2500 RPM [7]Enkoder Tipi [8]Fren Seçimi [9]Şaft(mil) sonu özellikler İşaret Özellik İşaret Özellik İşaret Özellik K I J Line-driver, kapasitif artımsal 5000 ppr 17-bit seri (artımsal enkoder) 17-bit seri (mutlak enkoder) A Frensiz K Kama oluklu (kamalı); yağ contasız B Frenli Y Kama oluksuz (kamasız); yağ contalı [1]Malzeme kodu İşaret Özellik M N Kama oluklu (kamalı); yağ contalı Kama oluksuz (kamasız); yağ contasız
![5KW D 3000 RPM E 2500 RPM [7]Enkoder Tipi [8]Fren Seçimi [9]Şaft(mil) sonu özellikler İşaret Özellik İşaret Özellik İşaret Özellik K I J Line-driver, kapasitif artımsal 5000 ppr 17-bit seri (artımsal](/docs-images/45/1595731/images/page_14.jpg "enkoder) 17-bit seri (mutlak enkoder) A Frensiz K Kama oluklu (kamalı); yağ contasız B Frenli Y Kama oluksuz (kamasız); yağ contalı [1]Malzeme kodu İşaret Özellik M N Kama oluklu (kamalı); yağ")
15 1.3 Servo Sürücünün Parçaları 1.4 Bakım ve Denetleme Lütfen güvenli ve kolay kullanım için motor ve sürücünün bakım ve denetlemelerini düzgün olarak yapınız. Günlük ve periyodik denetlemeler aşağıda verilmiştir. Tip Günlük denetleme Periyodik denetleme Denetleme periyodu Günlük 1 sene Denetlenecekler - Servis sıcaklığını,nemini kontrol edip kir veya başka bir madde olup olmadığına bakınız - Anormal titreme veya ses olup olmadığına - Giriş besleme voltajının normal olup olmadığına - Anormal bir koku olup olmadığına - Fana birşey kaçıp kaçmadığına - Sürücünün ön ve arka konnektörlerinin temiz olup olmadığına - Motor ve sürücü arasındaki bağlantının sıkı olduğundan ve soket pinlerinin sağlam olup olmadığına bakınız. - Bağlantıların sıkı olduğuna - Aşırı ısınma olup olmadığına - Terminallerin zarar görüp görmediğine ve sıkılığına



16 BÖLÜM-2 MONTAJ 2.1 Montaj ve yönü ve Yeri Montaj yönü uygun olmalıdır;aksi takdirde ortaya çıkacak sorunlardan dolayı kullanılamaz hale gelebilir.ac Servo sürücünün montajı yapılırken duvar,tahta gibi 4 tarafından havalandırmada sorun teşkil edecek engellere yeterli mesafede monte edilmesi gerekmektedir.hava giriş ve çıkışı engellenmeyecek veya ters akım oluşturmayacak şekilde montajı yapılmalıdır.aksi takdirde sorunlar ortaya çıkabilir. 0 Doğru Yanlış Radyatör fanındaki rüzgar direncini azaltmak ve ısının etkili bir şekilde dağılması için,kullanıcılar yukarıdaki şekilde görüldüğü gibi AC servo sürücüyü monte etmelidirler.

17 2.2 Önerilen Devre Kesici ve Sigorta Özellikleri 220V tipi Sürücü Kasası Devre Kesici Sigorta(T sınıfı) A Tipi Kasa 10A 20A B Tipi Kasa 20A 40A C Tipi Kasa 30A 80A D Tipi Kasa 40A 120A Note: 1.Kullanılacak devre kesici ve sigortanın UL/CSA standartlarına uygun olması kuvvetle tavsiye edilir. 2. Kaçak koruması için sürücüye ELB eklendiğinde,elb nin yanlış çalışmasından korunamk için,200ma den daha fazla hassas ve etki süresi 0.1 s den yüksek olan ELB lerden kullanılmalıdır. 2.3 Yüksek Harmonik ve Gürültülere Karşı Önlem Servo sürücünün ana devresi yüksek hızlı switch ler içerir,yani servo sürücünün çevresel kablolama ve topraklaması switchlerin gürültüsünden etkilenebilir.bu parazitten korunmak için,aşağıdaki ölçümler alınabilir. Sürücünün ana devre kablosunun girişine gürültü filtresini takınız. + Yüksek harmonikleri bastırmak için AC/DC reaktörün bağlantısı + Lütfen kontrolcüden gelen bağlantıları ve gürültü filtresinin servo sürücünün yanına yapabildiğiniz kadar yakın ayarlayın.

18 Kablolama sırasında, ana devre kablosu(motor ana devre kablosu) giriş-çıkış sinyal kablosundan 30cm uzakta olmalıdır. Bu kabloları aynı yatağa yerleştirmeyiniz veya birbirine bağlamayınız. Kaynak makinesi ve Elektro-erezyon makinesi için aynı güç kaynağını kullanmayınız.hatta farklı güç kaynakları kullanılsa bile,etrafta RF jeneratör varsa gürültü filtresiana dvre kablosunun girişine bağlanmalıdır. Topraklamanın doğru olduğuna emin olunuz Gürültü Filtresinin Montajı IEMI filtresinin servo sürücüye gelecek bütün parazitleri ortadan kaldırdığından emin olmak için,servo sürücünün kullanım klavuzuna göre bağlandığını ve montaj edildiğine emin olunuz ve aşağıdaki maddelere dikkat ediniz. Madde Açıklama 1 Servo sürücü ve gürültü filtresi aynı metal yüzeye monte edilmelidir. 2 Kablolama mümkün olduğunca kısa olmalıdır. 3 Metal yüzey iyi topraklanmalıdır. Servo sürücünün metal çevrelemesi veya topraklaması ve gürültü filtresi güvenli bir 4 şekilde metal yüzeye göre düzenlenmelidir, ve aralarındaki bağlantı noktaları oldukça geniş tutulmalıdır. Motor güç kablosunda bakır korumalı ekranlama olması gerekmektedir.(çift 5 ekranlama tercih sebebidir) Motor kablolarının iki tarafındaki bakır ekranlamalar en kısa yoldan ve mümkün 6 olduğunca geniş bağlantı alanı kullanılarak topraklanmalıdır AC/DC reaktörün Yüksek Harmoniklerden Korunma Bağlantısı Ölçümlerde yüksek harmoniklerin kaldırılması gerektiği yerlerde,ac/dc reaktör yüksek harmonikleri kaldırması için servo sürücüye bağlanabilir. Güç Tek Faz Giriş AC Reaktör Servo sürücü DC Reaktör Tek Faz/Üç Faz Giriş DC reaktör Servo sürücü 2.4 Rejeneratif Direnç Seçimi Motorun torku dönme yönüne ters tork çekerse,bunun anlamı enerji yükten sürücüye gönderiliyordur.enerji DC baranın kapasitesini artırır ve voltaj artışının genliğini artırır.belli bir değere ulaştığında,yeniden şarj olan enerji sadece rejenaratif direncte harcanabilir. Aşağıdaki tabloda EPS-B1 220V serisi için rejeneratif dirençlerin özellikleri gösterilmiştir.

19 İç rejeneratif direncin özellikleri Minimum izin Sürücü Kasası verilen direnç Direnç değeri (Ohm) Kapasitans (Watt) değeri (Ohm) A tipi Kasa B tipi Kasa C tipi Kasa D tipi Kasa Rejeneratif kapasite iç rejeneratif direncin mevcut kapasitesini aşıyorsa,rejeneratif direnç harici bağlanmalıdır.harici rejeneratif direnç için aşağıdaki maddelere dikkat ediniz. Madde İçerik 1 Alternatif olarak harici rejeneratif direnç bağlayınız. Lütfen direnç değerinin ve rejeneratif direncin kapasitansını doğru ayarlayınız,aksi 2 takdirde bazı fonksiyonlar etkilenebilir. Harici rejeneratif direnç kullanırken,direnç değeri minimum izin verilen direnç 3 değerinden az olmamalıdır,eğer kullanıcı rejeneratif direncin gücünü parallel bağlama ile yükseltmek isterse,direnç değerinin limit koşullarını sağladığından emin olmalıdır. 4 5 Doğada,rejenaratif direncin mevcut rejeneratif kapasitesi(ortalama değeri) nominal kapasitenin limitlerinde kullanıldığı zaman,direncin sıcaklığı 120ºC nin üzerine çıkabilir.(devamlı rejenerasyon altı) Güvenli olduğundan emin olmak için,rejeneratif dirençle termo-switch kullanılması önerilir. Harici rejeneratif direnci kullanıldığı zaman,direnç P,C ucuna bağlanmalıdır ve P,D ucu açık olmalıdır.harici rejeneratif direnç yukardaki tablodaki değerlere göre kullanılmalıdır.

20 BÖLÜM-3 KABLOLAMA 3.1 Sistem Yapısı ve Kablolama Servo Sistem Yapısı

21 3.1.2 Konnektör ve Sürücü Terminalleri Terminal ismi İsim Açıklama L1, L2, L3 Ana devre güç giriş terminali (ucu) L1C, L2C P, D, C U, V, W Kontrol devresi güç giriş ucu Harici rejenerasyon direnci bağlantı terminali Yüksek Harmonikleri Bastırmak için kullanılacak DC Reaktör bağlantı terminali Servo motor bağlantı terminali Topraklama 3-faz alternatif akım kaynağı bağlayınız.(lütfen ürün modeline göre doğru voltaj özelliklerini seçiniz.) 3-faz alternatif akım kaynağı bağlayınız.(lütfen ürün modeline göre doğru voltaj özelliklerini seçiniz.) Rejenerasyon direnci bağlanırken,lütfen P ve D yi kısa devre yapınız.rejenerasyon direncinin kapasitansı yoksa P ve D yi açık devre yapınız.(kısa devre kablolarını sökünüz) ve rejenerasyon direncinin P ve C arasına bağlayınız.kullanıcılar harici rejenerasyon direnci almak isteyebilir. Genelde, ve kısa devredir. Yüksek harmonikleri önlemek için, DC reaktör ve. arasına bağlanır. Servo motor bağlanır. Topraklama için güç toprak terminali ve motor toprak terminali ile bağlanır. CN1 Haberleşme portu terminali RJ45 eki, RS-485 veya CANopen bağlanabilir. CN2 I/O konnektör Kontrolcüye bağlanır. CN3 Enkoder konnektör Ana devre kablosu Motor enkoderi bağlanır. 1) Servo sürücünün ana devre kablosunun ölçüleri Harici terminal adı Terminal ismi Kablo yarıçapı mm2(awg) EPS-B1-0D20A 0D40A 0D75A 0001A 01D5A Ana devre güç kablosu L1, L2, L3 1.25(AWG-16) 2.0(AWG-14) Kontrol güç kablosu L1C, L2C 1.25(AWG-16) Motor güç kablosu U, V, W 1.25(AWG-16) 2.0(AWG-14) Harici rejeneratif güç direnci kablosu P, D, C 1.25(AWG-16) Topraklama kablosu Above 2.0(AWG-14) 2) Tipik ana devre kablolama örneği Ana devre kablolmasına dikkat ediniz. Ardışık kontrol dizaynın gücü açıkken aşağıdaki bakış açıları düşünülmelidir. Lütfen güç açıkken ardışık kontrol için aşağıdaki dizayını yapınız. Servo alarm sinyali verildikten sonra,ana devrenin güç beslemesi OFF yapılmalıdır.
22 Ana devre ve kontrolcüye güç verildiğinde,aynı anda güç verilmeli, veya ana devre beslemesi kontrol kaynağı açıldıktan sonra enerjilendirilmelidir. Güç kapatılırken,ilk olarak ana devre beslemesinin gücü kesilir,daha sonra kontrol kaynağının gücü kesilir. Tek Faz 220V AC Güç Girişi Gürültü filtresi Tek-faz AC V (50/60Hz) Peak Voltaj Sönümleyici Motor Optik Enkoder
23 3 Faz 220V Güç girişi Three phase AC V (50/60Hz) Gürültü filtresi Optik Enkoder
24 3.2 Motor Tarafında Terminal Motor Enkoderin Bağlanti Terminallerinin Görünümü Ve Anlamları Enkoder Tipi Line-driver enkoder 17-bit seri enkoder (artımsal) 17-bit seri enkoder (mutlak) Line-driver enkoder 17-bit seri enkoder (artımsal) 17-bit seri enkoder (mutlak) Terminal ismi İsim Fonksiyon Görünüm 1 5V PG güç beslemesi+5v 2 0V PG güç beslemesi 0V 3 PA PG giriş A+ fazı 4 /PA PG giriş A- fazı 5 PB PG giriş B+ fazı 6 /PB PG giriş B- fazı 7 PZ PG giriş Z+ fazı 8 /PZ PG giriş Z- fazı 9 FG Ekranlama 1 5V PG güç beslemesi +5V 2 0V PG güç beslemesi 0V 3 PD+ PG seri sinyal girişi 4 PD- PG seri sinyal girişi 9 FG Ekranlama 1 5V PG güç beslemesi +5V 2 0V PG güç beslemesi 0V 3 PD+ PG seri sinyal girişi 4 PD- PG seri sinyal girişi 5 BAT+ Batarya anot 6 BAT- Batarya katot 9 FG Ekranlama 1 FG Ekranlama 2 5V PG güç beslemesi +5V 3 0V PG güç beslemesi 0V 4 PA PG giriş A+ fazı 5 PB PG giriş B+ fazı 6 PZ PG giriş Z+ fazı 7 /PA PG giriş A- fazı 8 /PB PG giriş B- fazı 9 /PZ PG giriş Z- fazı 1 FG Ekranlama 2 5V PG güç beslemesi +5V 3 0V PG güç beslemesi 0V 4 PD+ PG seri sinyal girişi 7 PD- PG seri sinyal girişi 1 FG Ekranlama 2 5V PG güç beslemesi +5V 3 0V PG güç beslemesi 0V 4 PD+ PG seri sinyal girişi 7 PD- PG seri sinyal girişi 5 BAT+ Batarya anot 8 BAT- Batarya katot

25 3.2.1 Motor Güç Bağlanti Terminallerinin Görünümü Ve Anlamları Terminal ismi Name Function Appearance 1 U Motor U fazı gücü 2 V Motor V fazı gücü 3 W Motor W fazı gücü 4 PE Kılıf 3 U Motor U fazı gücü 2 V Motor V fazı gücü 4 W Motor W fazı gücü 1 PE Kılıf Note: The above table is based on the terminal at motor side, so please pay attention to it when connecting wire. 3.3 CN1 konnektörünün Bağlantıları CN1 iletişim konnektörüdür. Servo sürücü RS485 ve CANopen iletişimlerini desteklemektedir CN1 Terminali (I) Terminal görünümü (II) Terminal sinyal anlamları Terminal ismi İsim Fonksiyon 1,9 RS485+ RS485+ Sinyal ucu 2,10 RS485- RS485- Sinyal ucu 3,11 GND Toprak
 Komut Pulse Girişi(-) Tork Komut Girişi(-) Komut İşaret Girişi(-) 5 V-R EF 7 PU LS 9 T-R EF 11 SI GN Hız")
26 4,12 NC Kullanılmıyor 5,13 NC Kullanılmıyor 6,14 GND Toprak 7,15 CANH CANH Sinyal ucu 8,16 CANL CANL Sinyal ucu Kılıf FG Koruma kablosu 3.4 CN2 konnektörünün Bağlantıları CN2 Konnektörü 2 1 SG Toprak 27 DO PL Açık kollektör 6 AG ND 8 /PU LS 10 AG ND 12 /SI GN Hız komut girişi(-) Komut Pulse Girişi(-) Tork Komut Girişi(-) Komut İşaret Girişi(-) 5 V-R EF 7 PU LS 9 T-R EF 11 SI GN Hız komut girişi(+) Komut Pulse Girişi(+) Tork Komut Girişi(+) Komut İşaret Girişi(+) 29 DO DO PA O 35 PB O Dijital çıkış 3 (+) Dijital çıkış 2(+) Dijital çıkış 1(+) Enkoder çıkış A fazı(+) Enkoder çıkış B fazı(+) 26 DO 4-28 DO 3-30 DO 2-32 DO 1-34 /PA O /PB O HP UL S Yüksek- Hızlı Komut Pulse Girişi(+) /HP UL S 20 /PZ O Enkoder çıkış Z fazı(-) DI2 Dijital giriş 2 19 PZ O Yüksek- Hızlı Komut Pulse Girişi(-) Enkoder çıkış Z fazı(-) CO M+ 24 /HS IG N Yüksek- Hızlı Komut İşaret Girişi(-) 23 HS IG N 25 DO 4+ Yüksek- Hızlı Komut İşaret Girişi(+) Dijital Çıkış 4(+) 43 DI4 Dijital giriş 4 45 DI6 Dijital giriş 6 Harici 24V güç girişi Dijital çıkış(-) Dijital çıkış(-) Dijital çıkış(-) Dijital çıkış(-) Enkoder çıkış A fazı(-) Enkoder çıkış B fazı(-) 40 DI1 Dijital giriş 1 42 DI3 Dijital giriş 3 44 DI5 Dijital giriş 5 46 DI7 Dijital giriş DI8 Dijital giriş 8 50 DI8 Dijital giriş 8
27 1)Lütfen boşta kalmış uçları kullanmayınız. 2)Lütfen giriş-çıkış sinyal kablosunu ekranlamasını bağlayınız.servo sürücü tarafındaki konnektöre FG(Frame Grounding) yi takınız CN2 konnektörünün Sinyallerinin Anlamı Giriş Sinyalleri Kontrol modu Evrensel Pozisyon Kontrol Sinyal ismi Pin No Fonksiyon S-ON 40 Servo ON: Motora enerji verilmiş. C-MOD 41 Kontrol Mod Değişimi:2 kontrol arasında geçiş POT 42 İleri Limit Overtravel önlemi:servo Motor NOT 43 Geri Limit çalışırken işlemin durdurulması CLR 44 Pozisyon sapması pulse temizleme: Pozisyon kontrolü sırasında pozisyon sapma pulse i temzileme A-RST 45 Alarm reset: Servo alarmı silme INHIBIT 46 Pulse engelleme girişi ZEROSPD 48 Sıfır-hız sinyal girişi COM+ 47 I/O sinyal elektrik güç beslemesi,kullanıcının 24V DC ile beslemesi lazım HPULS+ 16 Yüksek-Hızlı Kanal Pulse Girişi HPULS- 17 * Sinyal+pulse train HSIGN+ 23 * CCW+CW Pulse train HSIGN- 24 * A + B Pulse train PULS+ 7 Düşük-Hızlı Kanal Pulse Girişi PULS- 8 * Sinyal+pulse train SIGN+ 11 * CCW+CW Pulse train SIGN- 12 * A + B Pulse train PL 3 Kollektör pulse sinyal terminali Hız kontrol V-REF 5 AGND 6 Tork Kontrol T-REF 9 AGND 10 Çıkış Sinyalleri Hız komut voltaj girişi Tork komut voltaj girişi Kontrol Mod Sinyal İsmi Pin No. Universal PAO+ 33 PAO- 34 PBO+ 35 PBO- 36 PZO+ 19 PZO- 20 ALM+ 31 Fonksiyon A fazı sinyali B fazı sinyali Z fazı sinyali 2-Faz pulse (A fazı ve B fazı) çıkış sinyaline bölünmüş enkoder frekansı Z pulse sinyali ALM- 32 Servo alarm: Anormal durum tespit edilirse OFF durumuna geçer COIN+ 29 Pozisyonlanma tamamlandı:pozisyon kontrol modunda,sapma
28 Control mode Signal name Pin No. COIN- 30 CZ+ 27 CZ- 28 BK+ 25 BK - 26 Function pulse i PA525 ten küçük olursa(pozisyonlama tamamlama genişliği),sinyal aktif duruma geçer Optik-bağlaştırıcı çıkışı Z fazı pulse i Harici fren sinyal çıkışı I/O Sinyal Dağıtımı (I) Giriş Sinyalinin Gürültüsü Genel olarak giriş sinyali öntanımlı ayarlarına göre kullanılır veya gereken şekilde dağıtılabilir. (1) Öntanımlı Ayarlara Göre Kullanımı Öntanımlı giriş sinyal dağıtım durum PA500 ~ PA507 arasından doğrulanabilir. Parametre Ayar Fabrika İsim Birim No. aralığı Ayarları PA500 Port DI1 giriş sinyal seçimi [0] Servo-on (S-ON) [1] Kontrol Mod Değişimi (C-MODE) [2] İleri sürme engellenmiş (POT) [3] Geri sürme engellenmiş (NOT) [4] Sapma sayıcısı temizleme (CLR) [5] Alarm reset (A-RST) [6] Giriş pulse engellenme (INHIBIT) [7] Sıfır-Hız Durumu (ZEROSPD) [8] İleri Tork Limiti (PCL) [9] Geri Tork Limiti (NCL) [10] Kazanç değişimi (GAIN) [11] Sıfır sinyali (ZPS) [12] Saklama(Retention) [13] Komut Frekans bölücüsü/ Çarpma Katsayısı 0(DIV0) [14] Komut Frekans bölücüsü/ Çarpma Katsayısı 1(DIV1) [15] Dahili Komut Hızı Seçme 0 (INSPD0) [16] Dahili Komut Hızı Seçme 1 (INSPD1) [17] Dahili Komut Hızı Seçme 2 (INSPD2) Etki zamanı 0 ~ 17 0 Hemen PA501 Port DI2 giriş sinyal seçimi 1 Hemen PA502 Port DI3 giriş sinyal seçimi 2 Hemen PA503 Port DI4 giriş sinyal seçimi 3 Hemen PA504 Port DI5 giriş sinyal seçimi 4 Hemen PA505 Port DI6 giriş sinyal seçimi 5 Hemen PA506 Port DI7 giriş sinyal seçimi 6 Hemen PA507 Port DI8 giriş sinyal seçimi 7 Hemen
29 Giriş portları DI1 ~ DI8 e pinleri ve öntanımlı sinyal isimleri aşağıdadır. Parameter No. Port ismi CN2 port pini Öntanımlı Sinyal PA500 DI1 40 S-ON PA501 DI2 41 C-MOD PA502 DI3 42 POT PA503 DI4 43 NOT PA504 DI5 44 CLR PA505 DI6 45 A-RST PA506 DI7 46 INHIBIT PA507 DI8 48 ZEROSPD Giriş sinyallerinin Parameter İsim No. Giriş sinyali 0 ın seçilmesi b.0001: DI1 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) [1] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b.0010: DI2 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken ) [1] H seviye sinyal aktif PA508 (optik-bağdaştırıcı yalıtkan) b.0100: giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) [1] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b. 1000: DI4 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) [1] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) Setting range n.0000~111 1 Unit Factory default n.0000 Effective time Hemen PA509 Giriş sinyali 1 in seçilmesi b.0001: DI5 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) [1] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b.0010: DI6 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) [1] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b.0100: DI7 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) n.0000~111 1 n.0000 Hemen
30 Parameter No. Name [1] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b. 1000: DI8 giriş sinyal seçimi [0] L seviye sinyal aktif (optik-bağdaştırıcı iletken) [1] H seviye sinyal aktif ( optik-bağdaştırıcı yalıtkan) Setting range Unit Factory default Effective time (2) Giriş sinyalinin dağıtımını değiştirdikten sonraki kullanımı Servo aktif,ileri limit,geri limit engelleme gibi sinyallerin Polarite tersleme olarak kullanıldığında,,eğer sinyal kablosunun kırılması gibi anormal bir durum görülürse,hareketin güvenli yönden sapmasına neden olabilir.bunu engellemek için aşağıdaki durumları uygulayınız. Giriş sinyalinin tipik devresi aşağıdaki gibidir: Servo sürücü Servo sürücü Yukarıdaki şekli örnek olarak alınız.optik-bağdaştırıcı iletken olduğu zaman,s-on sinyali L seviyesindedir;optik-bağdaştırıcı yalıtkan olduğu zaman S-ON sinyali H seviyesindedir. PA508 parametresi S-ON sinyalinin aktifliğine karar verir.pa508.0=0 iken L seviyesinde PA508.0=1 iken H seviyesindedir.
31 CN2 pini İsim 40 DI1 Sinyal Seçme Parametresi PA500=0 PA500=1 PA500=2 PA500=3 PA500=4 PA500=5 PA500=6 PA500=7 Sinyal İsmi Sinyal parametre durumu Sinyal durumu PA508.0=0 L sinyali aktif Servo-on (S-ON) PA508.0=1 H sinyali aktif Kontrol modu değiştirme(c- PA508.0=0 L sinyali aktif MODE) PA508.0=1 H sinyali aktif İleri limit (POT) PA508.0=0 L sinyali aktif PA508.0=1 H sinyali aktif Geri limit (NOT) PA508.0=0 L sinyali aktif PA508.0=1 H sinyali aktif Sapma Sayıcısı Silme (CLR) PA508.0=0 L sinyali aktif PA508.0=1 H sinyali aktif PA508.0=0 L sinyali aktif Alarm reset (A-RST) PA508.0=1 H sinyali aktif Giriş sinyal engelleme PA508.0=0 L sinyali aktif (INHIBIT) PA508.0=1 H sinyali aktif Sıfır-Hız durumu(zerospd) PA508.0=0 L sinyali aktif PA508.0=1 H sinyali aktif CN2 pini İsim Signal Seçme Parametresi Sinyal İsmi Sinyal parametre durumu Sinyal durumu PA508.0=0 L sinyali aktif PA500=8 Pozitif Tork Limiti (PCL) PA508.0=1 H sinyali aktif Negatif Tork Limiti(NCL) PA508.0=0 L sinyali aktif PA500=9 PA508.0=1 H sinyali aktif PA508.0=0 L sinyali aktif PA500=10 Kazanç switch (GAIN) PA508.0=1 H sinyali aktif PA508.0=0 L sinyali aktif PA500=11 Sıfır-Sinyali (ZPS) PA508.0=1 H sinyali aktif PA508.0=0 L sinyali aktif PA500=12 Retention PA508.0=1 H sinyali aktif Komut Frekans bölücüsü/ Çarpma PA508.0=0 L sinyali aktif PA500=13 Katsayısı 0 (DIV0) PA508.0=1 H sinyali aktif [14] Komut Komut Frekans Frekans bölücüsü/ PA500=14 bölücüsü/ Çarpma PA508.0=0 L sinyali aktif Çarpma Katsayısı Switchi 1 (DIV1) 1(DIV1) PA508.0=1 H sinyali aktif [16] Dahili Dahili Komut Komut Hızı Seçme PA500=15 Hızı Seçme 0 1 PA508.0=0 L sinyali aktif (INSPD1) (INSPD0) PA508.0=1 H sinyali aktif [16] 0Dahili Dahili Komut Komut Hızı Hızı Seçme Seçme 1 1 L sinyali aktif PA500=16 PA508.0=0 (INSPD1) Komut Frekans bölücüsü/ Çarpma PA508.0=1 H sinyali aktif Switchi [16] Dahili PA500=17 0(DIV0) Komut Hızı Seçme 2 L sinyali aktif PA508.0=0 (INSPD2) PA508.0=1 H sinyali aktif PA508.1=0 L sinyali aktif 41 DI2 PA501=n n # sinyaline bağlı PA508.1=1 H sinyali aktif n # sinyaline bağlı PA508.2=0 L sinyali aktif 42 DI3 PA502=n PA508.2=1 H sinyali aktif n # sinyaline bağlı PA508.3=0 L sinyali aktif 43 DI4 PA503=n PA508.3=1 H sinyali aktif n # sinyaline bağlı PA508.4=0 L sinyali aktif 44 DI5 PA504=n PA508.4=1 H sinyali aktif n # sinyaline bağlı PA508.5=0 L sinyali aktif 45 DI6 PA505=n PA508.5=1 H sinyali aktif n # sinyaline bağlı PA508.6=0 L sinyali aktif 46 DI7 PA506=n PA508.6=1 H sinyali aktif n # sinyaline bağlı PA508.7=0 L sinyali aktif 48 DI8 PA507=n PA508.7=1 H sinyali aktif
32 (3) Giriş Sinyali Doğrulaması Giriş sinyal durumu dp102 sinyal monitöründen izleyiniz.lütfen 8.4 Giriş Sinyal Görüntüleme bölümündeki dp102 detaylarını inceleyiniz. (4) Dikkat Edilecek Hususlar Eğer iki IO pini aynı sinyale dağıtılırsa sinyalin belirleyici durumu yüksek dereceli ID sinyaline bağımlı kılmak gerekir.eğer DI0 VE VE DI1 sıfır yapılırsa(s-on sinyali),sürücünün S -ON sinyal durumu DI1 tarafından belirlenir.(cn2-41 pin) (II) Çıkış sinyali Dağıtımı Çıkış sinyali CN2 ye PA510 ve PA511 ayarlarıyla atılır. (1) Fabrika ayarları Dağıtım durumunun doğrulanması
33 Aşağıdaki parametrelere göre dağıtım durumunun dabrika ayarları kontrol edilebilir. Parameter Fabrika Etki zamanı İsim Ayar aralığı Birim No. Ayarları Çıkış sinyal Seçimi d.0001: DO1 Çıkış sinyal seçimi [0] Alarm sinyal çıkışı(alm) d.0010: DO2 Çıkış sinyal seçimi [0] Alarm sinyal çıkışı (ALM) [1] Pozisyonlama tamamlandı (COIN) [2] Z pulse kollektör sinyali (CZ) [3] Harici fren sinyali (BK) [4] Servo-hazır çıkışı (S-RDY) [5] Hız uyumluluk çıkışı Hemen PA510 n.0000~9990 n.3210 (VCMP) [6] Motor dönüş algılama (TGON) [7] Tork limit sinyali (TLC) [8] Sıfır-Hız Algılama Sinyali (ZSP) [9] Uyarı çıkışı (WARN) d.0100: DO3 Çıkış Sinyal Seçimi DO2 ile aynı d.1000: DO4 Çıkış Sinyal Seçimi DO2 ile aynı PA511 Çıkış Sinyali Negatif b.0001: DO1(alarm sinyali ALM) çıkış sinyal seçimi [0] H seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) [1] L seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b.0010: DO2(alarm signal ALM) çıkış sinyal seçimi [0] H seviye sinyal aktif(optikbağdaştırıcı yalıtkan) [1] L seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b.0100: DO3(alarm signal ALM) output signal aspect selection; [0] H seviye sinyal aktif(optikbağdaştırıcı yalıtkan) [1] L seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) b.1000: DO4(alarm signal ALM) output signal aspect selection; [0] H seviye sinyal aktif(optikbağdaştırıcı yalıtkan) [1] L seviye sinyal aktif (optik-bağdaştırıcı yalıtkan) n.0000~0011 n.0000 Hemen DO1 ~ DO4 giriş portlarının pinleri aşağıdadır. Parameter No. İsim CN2 port pini Öntanımlı Sinyal DO1 31,32 ALM PA510.1 DO2 29,30 COIN
34 Parameter No. İsim CN2 port pini Öntanımlı Sinyal PA510.2 DO3 27,28 CZ PA510.3 DO4 25,26 BK (2) Çıkış Sinyal Dağıtımını Değiştirdikten Sonraki Kullanım Örnek olarak,hız kontrol sırasında,pozisyon tamamlama sinyali(coin) inaktiftir. Çıkış sinyalinin dağıtımı aşağıdaki tabloda gösterilmiştir. Çıkış sinyalinin tipik devresi aşağıdadır. Servo sürücü Röle Optik-bağdaştırıcı (NOT) Optik-bağdaştırıcının çıkış devresine uygulanabilecek maximum voltaj ve akım kapasitesi aşağıda belirtilmiştir. Voltaj: DC 30V (maximum) Akım: DC 50mA (maximum) Aşağıdaki tabloyu örnek olarak alınız.pa510 parametresi COIN in seviyesine karar vermektedir.coin sinyal aktif olduğunda,pa510=0, ve optik-bağdaştırıcı PC iletken olduğunda,coin sinyalinin L seviyesi aktif olur; PA510=1 ve optik-bağdaştırıcı PC yalıtkan olmadığında,coin sinyalinin H seviyesi aktif olur. CN2 pini İsim Sinyal Seçme Parametres i Sinyal İsmi 31, 32 DO1 Servo alarmı (ALM) 29,30 DO2 PA510=0 PA510=1 PA510=2 PA510=3 PA510=4 PA510=5 PA510=6 Alarm sinyal çıkışı (ALM) Pozisyonlama tamamlandı (COIN) Z pulse kollektör sinyal (CZ) Harici fren sinyali (BK) Servo-hazır çıkışı(s- RDY) Hız uyumluluk çıkışı(vcmp) Motor dönme algılaması (TGON) Sinyal Parametre Durumu PA511.0=0 PA511.0=1 PA511.1=0 PA511.1=1 PA511.1=0 PA511.1=1 PA511.1=0 PA511.1=1 PA511.1=0 PA511.1=1 PA511.1=0 PA511.1=1 PA511.1=0 PA511.1=1 PA511.1=0 PA511.1=1 Signal durumu H sinyali aktif L sinyali aktif L sinyali aktif H sinyali aktif L sinyali aktif H sinyali aktif L sinyali aktif H sinyali aktif L sinyali aktif H sinyali aktif L sinyali aktif H sinyali aktif L sinyali aktif H sinyali aktif L sinyali aktif H sinyali aktif
35 CN2 pini İsim Sinyal Seçme Parametres i PA510=7 PA510=8 PA510=9 27,28 DO3 As above 25,26 DO4 As above (3) Dikkat Edilecek Hususlar Sinyal İsmi Sinyal Parametre Durumu Signal durumu Torque limit sinyali PA511.1=0 L sinyali aktif (TLC) PA511.1=1 H sinyali aktif Sıfır-Hız Algılama PA511.1=0 L sinyali aktif Sinyali(ZSP) PA511.1=1 H sinyali aktif Uyarı Çıkışı (WARN) PA511.1=0 L sinyali aktif PA511.1=1 H sinyali aktif Z pulse kollektör PA511.2=0 L sinyali aktif (CZ) PA511.2=1 H sinyali aktif Harici fren sinyali PA511.3=0 L sinyali aktif (BK) PA511.3=1 H sinyali aktif Alarm sinyal pinleri rastgele dağıtılamaz.;sadece 31 inci(alm+) ve 32 nci(alm-) pinler kullanılabilir Z pulse kollektör çıkış sinyali kullanıldığı zaman,çıkış seviye durumu değiştirilemez.(pa511 pozisyonu inaktif olmasına bağlı) Eğer iki IO pini Z pulse kollektör çıkış sinyaline dağıtılırsa,sinyalin belirleyici durumu yüksek dereceli DO sinyaline bağımlı kılmak gerekir.eğer DO2 ve DO3 2(Z pulse kollektör sinyali) olarak ayarlanırsa,do3 Z pulse sinyali çikişi verir. ALM sinyali aktif olduğunda dikkat ediniz,bunun anlamı bir alarm vermiştir.alm inaktifse alarm vermemiş olur Kontrolcü Bağlantısı Örneği Servo sürücünün giriş-çıkış sinyalinin kontrolcüyle bağlantısı aşağıda gösterilmiştir. (I) Giriş Devresi Komutları 1) Düşük-Hız Pozisyonunda Giriş Devresi Komutları Bu bölümde CN2 konnektörünün 7-8(komut pulse girişi) ve 11-12(komut sinyal girişi)terminallerine yer verilmiştir. Komut pulse nin kontrolcü tarafındaki çıkış devresi,lineer sürücü çıkışı ve açık kollektör çıkışlarından herhangi birisini seçebilir.aşağıda sırasıyla belirtilmiştir. Lineer Sürücü Çıkışı a) Sürücü düşük-hız pulse kanalını alırsa
36 Kontrolcü Servo sürücü Lineer sürücü Optik-bağdaştırıcı Ekranlama katmanlarının her iki uçtaki topraklaması b) Sürücü yüksek hız pulse kanalı seçildiğinde Açık Kollektör Çıkış Kontrolcü Servo sürücü Lineer sürücü Optik-bağdaştırıcı Uygulanabilir lineer sürücüler T1 şirketinin AM26LS31 e benzer ürünler içerir. a) Kontrolcü açık kollektör çıkışına uygulandığında ve 24V DC sinyal güç kaynağı verildiğinde bağlama şekli Tip-1 dir.
37 Kontrolcü Servo sürücü Optocoupler b) Kontrolcü açık kollektör çıkışına uygulandığında ve 5VDC,12VDC ve 24VDC sinyal gücü sağlıyorsa,bağlama şekli Tip-2 dir. Lütfen R1 direncini,aşağaıdaki giriş akım değerine göre belirleyiniz. Giriş Akımı i = 10 ~ 15mA: Vcc 24V olduğunda, R1=2KΩ Vcc 12V olduğunda, R1=510Ω Vcc 5V olduğunda, R1=180Ω 2) Yüksek-Hız Pozisyonunda Giriş Devresi Komutları Bu bölümde CN2 konnektörünün 16-17(komut pulse girişi) ve 23-24(komut işaret girişi)
38 terminalleri belirtilmiştir. Kontrolcü tarafındaki komut pulse nin çıkış devresi sadece lineer sürücünün çıkışından kullanılabilir.aşağıda sırasıyla belirtilmiştir. 3) Analog Giriş Okuma Bu bölüm CN2 konnektörünün 5-6(hız komut girişi) ve 9-10(tork komut girişi) terminalleri ile alakalıdır. Analog ölçüm sinyalinin anlamı hız komut veya tork komut sinyalidir.giriş empedansı aşağıda gösterilmiştir. Kontrolcü Servo sürücü 1.8k(1/2W) dan fazla aaaaaaaveya 10K dan fazla 4) Giriş Devresinde Ardışık Kontrol Bu rölenin transistor devresiyle veya açık kollektör olarak bağlanır.eğer röle bağlantı için kullanılırsa,küçük(minor) akım için röle kullanılmalıdır.eğer kullanılmazsa,kısa-devre ortaya çıkacaktır. Servo Sürücü Servo Sürücü (II) Çıkış Devresi Röle Devresi Örneği 1) Ardışık Kontrol Çıkış Devresi Açık-kollektör örneği Servo alarmı,servo hazır ve diğer ardışık kontrol çıkış sinyalleri optic-bağdaştırıcının çıkış devresiyle birleştirilir ve röleye bağlanması gerekir.
39 Röle Servo sürücü (Not) Optik-bağdaştırıcının çıkış devresine uygulanabilecek maximum voltaj ve akım değerleri aşağıda belirtilmiştir. Voltaj: DC30V (maximum) Akım : DC50mA (maximum) 2) Lineer Sürücü Çıkış Devresi Bu partta CN2 portunun 33-34(A fazı sinyali),35-36(b fazı sinyali) ve 19-20(Z fazı sinyali)terminalleri açıklanmıştır. Enkoderin 2 faz seri bilgisini (A ve B fazı) pulse çıkış sinyallerine(pao,/pao,pbo,/pbo) ve orijin pulse sinyali(pzo,/pzo) ve çıkış lineer sürücü çıkışını değiştiriniz. Genellikle,hız kontrol çalışması sırasında,pozisyon kontrol sistemi kontrolcüye ayarlandığında kullanılır.kontrolcü tarafında,lütfen line-receiver bağlantısını alınız. Servo sürücü Alıcı Tarafı SN75175 gibi line-receiver ların aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaabağlanması 3.5 CN3 Konnektörünün Bağlanması
40 Bu bölümde enkoder,servo sürücü ve servo sürücünün çıkış sinyalinin kontrolcüye bağlanması,ve ilaveten CN3 konnektörünün enkoder için terminaller düzenlemeleri verilmiştir CN3 Konnektörünün Bağlantıları (I) Enkoder Konnektörü CN3 ün Görünümü (II) CN3 konnektörünün motor tarafı Hızlı Ek: Askeri Konnektör: Not: Yukardaki şekil kablo tarafındaki terminallere göre düzenlenmiştir.lütfen kabloyu takarken dikkat ediniz. (III) Sinyallerin Anlamı CN3 konnektörünün anlamları Terminal Terminal İsim Fonksiyon ismi ismi 1 /PA PG girişi/a fazı 11 İsim Fonksiyon
41 Terminal Terminal İsim Fonksiyon ismi ismi İsim Fonksiyon 2 PA PG girişi A fazı 12 3 /PB PG girişi /B fazı 13 4 PB PG girişi B fazı 14 5 /PZ PG girişi /Z fazı 15 6 PZ PG girişi Z fazı 16 7 PG5V PG besleme +5V 17 PD- PG seri sinyal girişi 8 PG5V PG besleme +5V 18 PD+ PG seri sinyal girişi 9 GND PG besleme 0V GND PG besleme 0V 20 (IV) Enkoder Kablosu Sinyal Bağlantısı Artımsal Enkoder Sinyal Bağlantısı CN3 konnektör tarafı Motor tarafı Terminal ismi İsim Fonksiyon Hızlı Ek Askeri Ek Renk 2 PA PG girişi A fazı 3 4 Yeşil 1 /PA PG girişi /A fazı 4 7 Yeşil Siyah 4 PB PG girişi B fazı 5 5 Mor 3 /PB PG girişi /B fazı 6 8 Mor Siyah 6 PZ PG girişi Z fazı 7 6 Sarı 5 /PZ PG girişi /Z fazı 8 9 Sarı Siyah 7/8 PG5V PG besleme +5V 1 2 Kırmızı 9/10 GND PG besleme 0V 2 3 Siyah Casing PE Ekranlama bit serial encoder signal connection CN3 konnektör tarafı Motor tarafı Terminal İsim Fonksiyon Hızlı Ek Askeri Ek Renk ismi 18 PD+ PG seri sinyal girişi 3 4 Mavi 17 PD- PG seri sinyal girişi 4 7 Mavi Siyah BAT+ 5 5 Kahverengi BAT- 6 8 Kahverengi Siyah 7/8 PG5V PG besleme +5V 1 2 Kırmızı 9/10 GND PG besleme 0V 2 3 Siyah Casing PE Ekranlama 9 1 Not: 1. Eğer 17 bit mutlak enkoder varsa,bat+ ve BAT- harici bataryaya bağlanır.eğer 17 bit artımsal enkoder varsa BAT+ ve BAT- yi kullanmaya gerek yoktur. 2. Yukardaki renkler sadece referans olarak kullanılabilir CN3 Konnektör bağlantısı örneği Line-driving ve artımsal enkoder bağlantısı
42 17-bit seri Enkoder Bağlantısı Client side Servo driver Encoder A phase pulse Encoder B phase pulse Encoder C phase pulse 17-bit serial encoder Line receiver SN75175 etc. Line driver AM26LS31 etc.

43 Bölüm IV Panel Yönetimi 4.1 Panel Panel, ekran ve tuşlardan oluşmaktadır. Panel,ekran durum izleme,ek fonksiyon uygulama,parametre ayarlama ve servo sürücünün durumu izleme gibi özelliklere sahiptir. Panel üzerindeki tuşların isimleri ve fonksiyonlarını aşağıda görebilirsiniz. Tuş MOD SET Açıklama Modlar arasında geçiş yapar ya da kademeli çıkış butonu olarak kullanılabilir Fonksiyon rakamlarını sola götürür Carry biti oluşturmadan fonsiyonun değerlerini artırır.eğer veri işaretli(signed) sayıysa,fonksiyon rakamları + ve arasında değişir. ENTER tuşu olarak kullanılır.parametre girmeyi sağlar. Servo alarmı nasıl resetlerim? Servo alarmı restlemek için YUKARI ve AŞAĞI tuşlarına aynı anda basınız. (Not) Alarmı resetlemeden önce,alarmın nedenini araştırınız. 4.2 Fonksiyon değiştirme MODE/SET e basarak istediğiniz modu seçiniz. Her fonksiyonun çalışma metodunu öğrenmek için ilgili bölümü okuyunuz.

44 Güç verildi MOD tuşu Durum Görüntüleme Parametre Görüntüleme SET key Parametre ayarlama Ek Fonkisyon Modu 4.3 Durum Görüntüleme Durum görüntüleme,servo sürücünün durumu bit sayısıyla gösterilir. Bit verisi Kısaltma ve İşaret Görüntü İçeriği Görüntü No İsim Güç kaynağı görünümü hazır Bit Data Pozisyon Kontrol Modelinin Açıklaması Ana devrenin gücü açılınca led yanar. Hız ve Tork Kontrol Modelinin Açıklaması Ana devrenin gücü açılınca led yanar.
45 Uyumluluk Ana devrenin gücü kapatılınca led söner. Pozisyonlanma tamamlandı (COIN) Ana devrenin gücü kapatılınca led söner. Hız uyumluluğu (VCMP) görünümü Giriş işaretini gir Pozisyon Kontrol Dönme algılama Komut Giriş Tork algılama Hız kontrol Tork Kontrol Limit işareti Operasyon işareti Reset sinyali varsa led yanar (CLR) Led yanar Dönme hızı ayarlanan hızı geçerse led yanar(tgon) Komut pulse girişinin gösterir Ayarlanan nominal torkun %20 üzerine çıkılırsa led yanar ayarlanan torkun altına düşerse alarm söner Led söner Led söner Kısaltma ve İşaretler Sol limit Sağ limit Eşzamanlı limitin alternatif gösterimi Motor dönüyorsa aşağıdaki işaret dinamik(dönerek)yanar. Motor duruyorsa iaşretin dönmesi durur. Reset sinyali varsa led yanar (CLR) Led söner Dönme hızı ayarlanan hızı geçerse led yanar(tgon) Hız kontrolde: Hız komut girişini göster Tork kontrolde: Tork komut girişini göster Ayarlanan nominal torkun %20 üzerine çıkılırsa led yanar ayarlanan torkun altına düşerse alarm söner Mevcut mod Hız kontrol altında çalışıyorsa led yanar Mevcut mod Hız kontrol altında çalışıyorsa led yanar Sol limit sağ limit Alternatif görünüm ve eşzamanlı limit sırasında Motor dönüyorsa aşağıdaki işaret dinamik(dönerek)yanar. Motor duruyorsa işaretin dönmesi durur. 4.4 Monitor görüntüleme (dp ) Bu görüntülemede,servo sürücünün komutlarının değerleri,giriş-çıkış sinyal durumları ve servo sürücünün dahili durumu görüntülenebilir.panelde dp ile başlayan durumlardır Görüntü İçeriği Lütfen 5.1 bölümünü görüntülenen içerikle ilgili referans alınız.
46 4.4.2 Görüntüleme Örneği Bu bölümde motor hızını(dp 00)görüntülemek için yapılcak işlemler belirtilmiştir. İşlemden sonra Prosedür Kullanılan tuşlar panel görünümü İşlem MOD a basınız Parametre dp00 değilse, veya tuşlarını dp00 ayrlamak için kullanınız. SET tuşuna basınız,soldaki figürdeki motor hızını görüntüleyiniz. 4 5 İşlem sonu SET veya MOD tuşuna basarak Prosedür 1 e geri dönünüz. 4.5 Parametre Modu İlgili Komutlar Servo sürücünün parametrelerini hazırlayınız.panelde,pa ile başlayan durumlardır. Hafıza Ayarlama Parametre düzenlendikten sonra,saklamak için SET e basınız ve paneled depolnan duruma göre bir saniyeliğine durum sembolleri görünür. Semboller Açıklama Değer tipi Değer doğru olarak kaydedildi. Parametre yeniden başladıktan sonra aktif olacak(reset) Yanlış değer girişi veya giriş verisi kampsamdışı (Out of Range) Parametre şifreli,düzenleme yapılamaz. Değer tipleri(sayı sistemleri) aşağıda gösterilmiştir. Semboller Açıklama Değer tipi gösterilmiyor,bunun anlamı parametre onluk sistemde yazılmış.eğer veri işaretsiz(unsigned) sayıysa,en soldaki basamak 0~6 olabilir,ve diğer rakamalar 0~9 olarak ayarlanabilir.veri işaretli(signed) sayıysa,en soldaki basamak işareti belirtir. En soldaki(belirleyici) basamak "b" ise bu değer ikilik(binary) sistemdir. 0 ~ 1 arasında değer alır. En soldaki(belirleyici) basamak "d" ise bu değer onluk(decimal) sistemdir. 0 ~ 9 arasında değer alır. En soldaki(belirleyici) basamak "h" ise bu değer onaltılık(hexa-decimal) sistemdir.0 ~ F arasında değer alır Parametre Ayarları Örneği (PA ) Bu bölümde PA100 pozisyon kazancı parametresinin değerlerinin değiştirlmesini örnek olarak gösterilecektir.pa tan 200 e değiştirilecektir.
47 Prosedür 1 İşlemden sonra panel görünümü Kullanılan tuşlar MOD tuşuna basınız. İşlem veya tuşlarına basarak PA100 görünüz. SET tşuna basarak düzenleme ekranına geliniz ve mevcut değer olan 40 değerini görünüz. tuşuna basarak göstergeyi 4 ün yanına getiriniz. (yanıp sönen rakam düzenlenebilir.) defa tuşuna basarak ekranda 00 değerini görünüz. tuşuna basarak göstergeyi şekildeki gibi yapınız. 2 defa tşuna basarak değeri 200 olarak görünüz. SET tuşuna basarak PA100 parametresini 200 olarak ayarlayınız.eğer girdiğiniz değer minimum ve maximum arasında ise ve hemen uygulanıyorsa soldaki sembol görünür. Eğer girdiğiniz değer minimum ve maximum arasında ise ve güç kapatılıp tekrar verildikten uygulanıyorsa soldaki sembol görünür. Eğer girdiğiniz değer minimum ve maximum arasında değilse soldaki sembol görünür ve değer değiştirme işlemi yapılmaz. 9 Yaklaşık bir saniye sonra,ekran prosedür 2 deki gibi düzenleme ekranına döner. 10 Eğer PA100 değeri değiştirlmek istenmiyorsa MOD tuşuna basılır ve prosedür 2 ye tekrar dönülür. 11 İşlem sonu 4.6 Ek Fonksiyon Örneği (AF ) Ek fonksiyonlar servo sürücünün düzeltme ayarlarıyla ilgilidir. Panelde AF ile başlayan ayarlardır Ek Fonksiyonun İçeriği
48 Lütfen bölüm 6.1 i referans alınız Ek Fonksiyon Örneği (AF ) Bu bölümde AF005 i fabrika ayarlarına resetleme örneklendirilmiştir. Procedures Panel display after operation Keys used Operation 1 MOD tuşuna basarak AF ekranına gelinir. 2 veya tuşuna basarak AF005 ekranda görülür.. 3 Eğer Servo işlevsiz (non - operational) durumdaysa,set e basınız.panelde soldaki figür ortaya çıkacaktır. Eğer servo operational durumdaysa veya arka panel kilidi(af03) kurulmuşsa(set-edilmişse),ek fonksiyon kullanılabilir değildir. Soldaki resim görülür. 4 tuşuna sürekli basarak soldaki şekli görünüz. 5 Soldaki resmi görene kadar basmaya devam ediniz.işlem tamamlandı. 6 Basmayı sonlandırınız. Soldaki resim görülecektir. 7 MOD veya SET tuşuna basarakek fonksiyonlardan çıkınız ve prosedür 2 ye dönünüz 8 İşlemin sonu 4.7 Parametre Değer Atama Bu bölümde bu manuelde parametrelerin yazımıyla ilgili metodları içerir Parametre değeri atama Parametr e PA 100 İsim Ayar Aralığı Fabrika Birim Ayarları Etki zamanı Pozisyon Kazancı 1~100 1/S 40 Hemen Diğer Parame tre etiketi Parametr eye verilebilec ek değer aralığı Parametre birimi Fabrika ayarları Bazı parametreler değiştirldikten sonra Hemen kullanılabilir.bazıları ise tekrar güç verildiğinde kullanılır. Parametr enin diğer notları

49 4.7.2 Parametre Seçim Fonksiyonu Yazımı
50 Bölüm V Monitör Göstericisi 5.1 Monitör göstericisine Bakış Monitor göstericisi servo sürücünün komut değerlerini gösterir,giriş-çıkış sinyalleri, ve servo sürücünün dahili durumunu gösterir. Monitor göstericisi aşağıda tabloda gösterilmiştir. Monitör No İçerik dp 00 dp 01 dp 02 dp 03 dp 04 dp 05 dp 06 Birim Motor hızı Motorun çalışma hızını gösterir [r/min] Motor geribesleme pulse sayısı (enkoder birimi, düşük 4 basamak) Motorun enkoder geribesleme pulse toplamının düşük 4 [1 Encoder pulse ] basamağı Motor geribesleme pulse sayısı (enkoder birimi, düşük 5 basamak) [10000 Encoder Motorun enkoder geribesleme pulse toplamının düşük 5 pulse ] basamağı Motor komut giriş pulse sayısı (elektronik dişli oranından önce) (kullanıcı birimi, düşük 4 basamak) [1 Komut pulse ] Pozisyon kontrolünde, Motorun komut giriş pulse toplamının düşük 4 basamağı Motor komut giriş pulse sayısı (elektronik dişli oranından önce) (kullanıcı birimi, düşük 5 basamak) [10000 Encoder Pozisyon kontrolünde, Motorun komut giriş pulse toplamının pulse ] düşük 5 basamağı Hata pulse sayısı (enkoder birimi, düşük 4 basamak) Pozisyon kontrolünde,hata pulse sayısının toplamının düşük 4 [1 Encoder pulse ] basamağını gösterir. Hata pulse sayısı (enkoder birimi, düşük 5 basamak) [10000 Encoder Pozisyon kontrolünde,hata pulse sayısının toplamının düşük 5 pulse ] basamağını gösterir. dp 07 dp 08 dp 09 dp 10 Hız komutu (Analog voltaj komutu) Hız kontrolünde,analog girişin voltaj değerini gösterir. Gösterilen değer,null shiftin düzeltilmesinden sonraki değerdir.voltaj ±10V u aşarsa,düzgün olarak görüntülenemez. Dahili Hız Komutu Hız ve pozisyon kontrolünde dahili hız komutunu gösterir. Tork komutu (Analog voltaj komutu) Tork kontrolünde,analog girişin voltaj değerini gösterir. Gösterilen değer,null shiftin düzeltilmesinden sonraki değerdir.voltaj ±10V u aşarsa,düzgün olarak görüntülenemez. Dahili Tork Komutu(nominal torka bağlı değer) Hız ve pozisyon kontrolünde dahili tork komutunu gösterir. [0.1V] [r/min] [0.1V] [%] dp 11 Tork geribesleme (nominal torka bağlı değer) Tork kontrol,hız kontrol ve pozisyon kontrol altında tork [%]
51 Monitoring No. dp 12 dp 13 Display contents Geri-besleme değerini gösterir. Giriş sinyal görüntüleme CN2 konnektöründe sürücü giriş sinyalini gösterir. -- Çıkış sinyal görüntüleme CN2 konnektöründe sürücü çıkış sinyalini gösterir. -- Unit dp 14 dp 15 dp 16 dp 17 dp 18 dp 19 Komut pulse frekansı Pozisyon kontrolünde kontrolcünün(plc,motion) frekans komut pulse ni gösterir. Ana devre voltajı Doğrultulmuş giriş gücünün DC voltajını görüntüler. Toplam işlem süresi Sürücünün toplam işlem süresini gösterir.bu süre sürücüye güç verildikten sonraki kaydedilen süredir,eğer AF005 işlemi uygulanırsa(fabrika ayarları) bu değer sıfırlanacaktır. Dönüş açısı Motorun elektriksel dönüş açısını gösterir. Enkoder gerçek pozisyonu (tek dönüş mutlak değer veya çoklu dönüş mutlak değer enkoderı) Mutlak enkoder(tek veya çok dönüş) kullanıldığında, enkoderin tek dönüşündeki mutlak değeri verir. Enkoder dönüş sayısı (sadece mutlak enkoder için geçerli) Mutlak enkoder kullanıldığında enkoder [0.1Khz] [V] [Hous] [deg] [2 Encoder pulse ] [1 ring] dp 20 Kümülatif yük faktörü (kümülatif yük 100% olduğunda nominal değeri verir) Motor aşırı-yük korumasındayken alarm düzeyini gösterir. [%] dp 21 dp 22 Rejenerasyon yük faktörü (rejeneratif yük 100% olduğunda nominal değeri verir) [%] Motor rejeneratif aşırı-yük korumasındayken alarm düzeyini gösterir. DF yük fakörü Dinamik fren(df) korumasında alarm düzeyini gösterir. [%] dp 23 dp 24 Yükün atalet(inertia) oranı Yük ve motor arasındaki ataletin oranını verir. Efektif Kazanç Görüntüleme Pozisyon ve Hız Kontrolündeki veri kazancını gösterir. 1:Birinci grup Kazanç 2:İkinci Grup Kazanç [%] 5.2 Monitör Gösterim İşlemi Örneği Örnek olarak dp 00 ı alınız. İşlem aşağıda gösterildiği gibidir. Bu bölümde servo motorun hızının 1600 rpm olduğunu ekranda gösterme işlemini içermektedir.
52 Prosedür İşlemden sonra Panel Tuşlar İşlem MOD tuşuna basarak,ek fonksiyonlarını seçiniz. Parametre dp00 değilse, veya tuşlarına basarak DP00 ı görüntüleyiniz. SET tuşuna basarak motorun dönüş hızını görebilirsiniz. 4 5 İşlem sonu SET veya MOD tuşuna basarak prosedür 1 deki ekrana dönünüz. 5.3 Giriş Sinyal Görüntüleme Giriş sinyal durumu dp12 kullanılarak görüntülenebilir.aşağıda prosedürleri bulabilirsiniz Görüntüleme Prosedürü Giriş sinyali görüntüleme işlemi aşağıdaki gibidir. Prosedür İşlemden sonra Panel Tuşlar İşlem 1 MOD tuşuna basarak ek fonksiyonları açınız. 2 Parametre DP12 değilse, veya tuşuna basarak DP12 yi seçiniz. 3 SET tuşuna basarak arayüze giriniz. Soldaki resim görünecektir. 4 SET veya MOD tuşuna basarak prosedür 1 deki ekrana dönünüz. 5 End of operation Görüntünün Değerlendirilme Metodu Dağıtılan giriş sinyali panelin LED bölümünde ilgili bölümü yakar. Giriş pini ile LED numarası arasındaki ilişki aşağıda verilmiştir. Giriş sinyali aktif durumdaysa, LED in üst kısmı yanar. Yukarı: Giriş sinyalinin aktifliğine bağlı Aşağı : Giriş sinyalinin seviyesine bağlı No. Giriş sinyali L seviyesi ise (giriş optik-bağdaştırıcısı iletken),led in alt kısmı yanar. LED No. Giriş Pini Sinyal İsmi(öntanımlı) 1 40 S-ON 2 41 C-MOD
![LED No. Giriş Pini Sinyal İsmi(öntanımlı) 3 42 POT 4 43 NOT 5 44 CLR 6 45 A-RST 7 46 INHIBIT 8 48 ZEROSPD [Not] 1.](/docs-images/22/1595731/images/53-0.png "Harici giriş yokken,uygun IO sinyali PA[508] VE PA[509] parametreleri değiştirilerek aktif olabilir(giriş sinyal açısı seçimi).")
53 LED No. Giriş Pini Sinyal İsmi(öntanımlı) 3 42 POT 4 43 NOT 5 44 CLR 6 45 A-RST 7 46 INHIBIT 8 48 ZEROSPD [Not] 1. Harici giriş yokken,uygun IO sinyali PA[508] VE PA[509] parametreleri değiştirilerek aktif olabilir(giriş sinyal açısı seçimi).dp12 sadece harici giriş sinyalinin seviyesini göstermez,ayrıca giriş sinyalinin aktif durumunu da gösterir. 2. Giriş sinyali negative değilse,pot ve NOT sinyalleri optik-bağdaştırıcı iletken değilken inaktiftir,bunun anlamı sürme engellenmiştir.(overtravel) Görüntü Örneği Giriş sinyali örneği aşağıda verilmiştir. Giriş oprik-bağdaştırıcısı iletkenken, PA508.0 = 0, ve S-ON sinyali aktiftir. (L seviyesinde servo ON ). No. 1 numaralı LED in üst bölümü 1 numaralı LED in alt bölümü The input opticalcoupler is conductive, PA508.0 = 1, and S-ON signal H is inactive (servo ON at H level). No. 1 numaralı LED in alt bölümü Giriş optik-bağdaştırıcısı iletken değilse, PA508.0 = 1, ve S-ON sinyali aktif değildir. (H seviyesinde servo ON). No. 1 numaralı LED in üst bölümü 5.4 Çıkış Sinyali Görüntüleme Output signal state can be confirmed through output signal monitoring (dp 13). The procedures, judgment method and example of display are shown as follows Görüntüleme Prosedürleri
54 Çıkış sinyali görüntüleme prosedürleri aşağıdaki gibidir. Prosedür İşlemden sonra Panel Tuşlar İşlem 1 MOD tuşuna basarak ek fonksiyonları açınız. 2 Parametre DP13 değilse, veya tuşuna basarak DP13 ü seçiniz. 3 SET tuşuna basarak arayüze giriniz. Soldaki resim görünecektir. 4 SET veya MOD tuşuna basarak prosedür 1 deki ekrana dönünüz. 5 İşlem sonu Görüntünün Değerlendirme Metodu Dağıtılan giriş sinyali panelin LED bölümünde ilgili bölümü yakar. Giriş pini ile LED numarası arasındaki ilişki aşağıda verilmiştir. Giriş sinyali aktif durumdaysa, LED in üst kısmı yanar. Yukarı: Giriş sinyalinin aktifliğine bağlı Aşağı : Giriş sinyalinin seviyesine bağlı No. Giriş sinyali L seviyesi ise (giriş optik-bağdaştırıcısı iletken),led in alt kısmı yanar. LED No. Giriş Pini Sinyal İsmi(öntanımlı) 1 31,32 ALM 2 29,30 COIN 3 27,28 CZ 4 25,26 BK [Not] 1. Çıkış sinyali null durumda olsa bile,io seviyesine uygun polarite PA [511] parametresi düzeltilerek değiştirilebilir. (çıkış sinyal açısının seçimi). DP12 sadece çıkış sinyalinin seviyesini göstermez,ayrıca harici giriş sinyalinin aktif durumunu da gösterir. 2. Çıkış pini 2CN-31 ve 2CN-32 sadece ALM sinyali olarak kullanılabilir ve çıkış polaritesi PA [511] parametresi düzeltilerek değiştirilebilir (çıkış sinyal açısı seçme). Çıkış pini Z pulse kollektör çıkışı (CZ), dp 13 ün uygun basamağı yanmaz.z pulse çıkışı için birden fazla pin seçilirse,sadece bir Z sinyali(öncelik sırası DO2>DO3>DO4) çıkış olabilir Görüntüleme Örneği Giriş sinyali örneği aşağıda verilmiştir. PA511.0=0, ALM sinyali inaktif, ve optic bağdaştırıcı iletken (ALM sinyali L seviyesinde
 No. 1 numaralı LED in alt bölüm 5.5 Güç tekrar verildiğinde Görüntüleme Eğer dp No.")
55 1 numaralı LED in alt bölümü No. PA511.0=0, ALM sinyali H seviyesinde,ve optik bağdaştırıcı iletken değil (ALM sinyali H seviyesinde) No. 1 numaralı LED in üst bölümü PA511.0=1, ALM sinyali L seviyesinde,ve optik bağdaştırıcı iletken(alm sinyali L seviyesinde) No. 1 numaralı LED in alt bölüm 5.5 Güç tekrar verildiğinde Görüntüleme Eğer dp No. PA014ile ayarlanırsa, güç açıkken, panel hali hazırda ayarlanmış dp No. yu gösterir. Fakat, eğer 50(fabrika ayarlarına) ye ayarlanırsa, güç açıldığındaki durumu gösterir. Parameter Ayar İsim Birim Fabrika Etki No. aralığı Ayarları zamanı PA Diğer Notlar Başlangıç durum gösterimi Lütfen görüntüleme içeriğini kontrol ediniz.50 değerine ayarlandığında panel durum kodunu gösterecektir. 0 ~ dp 01, dp 03 and dp 05 in değer aralığı gösterimi[-32767, 32767] dir; değerinde panel aşağıdaki gibi görünür. Güç tekrar verildiğinde En soldaki belirleyici basamaktaki noktanın analmı negatifliği belirlemesidir. WMotor feedback pulse mutlak değeri sayısı (dp dP 01), giriş sinyali pulse komutu sayısı(dp dP 03) ve sapma pulse sayısı (dp dP 05) dan büyüktür, ve gösterilen veri güncellenmez.
56 Chapter VI Ek Fonkisyonlar 6.1 Ek Fonksiyonlara Bakış Ek fonksiyonlar AF koduyla başlamaktadır ve genel olarak servo motorun düzenlemeleri ve işlmleriyle alakalıdır. Aşağıdaki tabloda ek fonksiyonların anlamını ve bazı referansal bölümlerini bölümlerini bulabilirsiniz. AF No Fonksiyon Referensal Bölüm AF 00 Hata günlüğü gösterimi 6.2 AF 01 Yer Tanımlama (sadece pozisyonlamada aktiftir.) 6.3 AF 02 Jog işlemi 6.4 AF 03 Ön Panel Kilitleme İşlemi 6.5 AF 04 Alarm temzileme 6.6 AF 05 Parametre başlatma 6.7 AF 06 Analog miktarın manuel ayarlanması (hız ve tork) komut offset 6.8 AF 07 Hız komut offsetin manuel ayarlaması 6.9 AF 08 Tork komut offsetin manuel ayarlaması 6.10 AF 09 Motorun ilgili parametrelerini kontrol et 6.11 AF 10 Servo Sürücünün Yazılımını Göster 6.12 AF 12 Mutlak enkoder değeri ayarla 6.13 AF 15 Yük ataletinin manuel algılanması Alarm Günlüğünün Gösterilmesi (AF 00) Servo sürücü geriye dönük en fazla 10 alarm kaydını bulabilir. Alarm No ve zaman damgasını doğrulamak için kullanılır. *. * Zaman damgası:bu fonksiyon,kontrol güç kaynağı ve ana devre gücünün 1 saatlik birimlerde şarj olmasından sonra zamanı ölçer ve alarm verildikten sonra toplam işlem süresini gösterir.eğer hiiç durmadan çalışırsa 7.5 yıl civarında ölçüm yapabilir. Alarm günlüğü gösterim prosedürleri aşağıdadır. İşlemden sonra Panel Prosedür Tuşlar Görünümü İşlem MOD tuşuna basarak,ek fonksiyonlarını seçiniz. Parametre AF00 değilse, veya tuşlarına basarak AF00 ı görüntüleyiniz. SET tuşuna basarak son alarm kodunu görebilirsiniz. 4 Buradaki Numara Lütfen alarm listesini alarm sırasını gösterir. Referans alınız. Numaranın artması alarmın eski olduğunu gösterir tuşuna basınız ve bir önceki alarm görüntülenecektir. tuşuna basınız ve yeni alarmı görüntüleyiniz. Soldaki sayı büyüdükçe, eski alarm görüntülenir.
57 5 6. Buradaki Numara Lütfen alarm listesini alarm sırasını gösterir. Referans alınız. Numaranın artması alarmın eski olduğunu gösterir MOD a basınız,hexa-decimal zaman damgasını görüntüleyiniz. MOD a tekrar basınız,arayüz tekrar Alarm No. ya döner zaman damgasını gösterir. tuşuna basınız ve yeni alarm gösterilir. 7 8 İşlem Sonu <NOT> Set tuşuna basarak prosedür 2 ye dönünüz. Aynı alarm sürekli verildiğinde,hataların arasındaki zaman farkı 1 saaten azsa, alarmlar kaydedilmeyecektir.zaman aralığı 1 saati geçtiğinde,bütün hatalar kaydedilmiş olur. Alarm olmadığında,alarm numarası 0 dır. Alarm günlüğü AF04 ile silinebilir.alarm reset veya ana devrenin gücünün kapatılması alarm günlüğünü silmez. 6.3 Yer Tanımlama (AF 01) Servo sürücüye yer tanımlandıktan sonra,motor geri-besleme yeri vepulse pozisyon belirleme PA741 ve PA742 ye ayarlanabilir. Prosedür İşlemden sonra Panel Görünümü Tuşlar İşlem 1 MOD a basınız veya tuşlarını kullanarak AF01. SET e basarak soldaki resmi görüntüleyiniz. tuşuna sürekli basarak soldaki resmi görünüz. Soldaki resim yanana kadar basmaya devam ediniz.şekil işlemin tamamlandığını söyler Tuştan elinizi çekiniz,panel soldaki gibi görünecektir. MOD veya SET e basarak prosedür 2 ye dönünüz. 8 İşlem tamamlandı 6.4 JOG işlemi(af 02) JOG işlemi servo motorun hız kontrolünde herhangi bir kontrolcüye bağlanmadan çalışmasını kontrol eder. Jog işleminde overtravel koruma fonksiyonu aktif değildir.bundan dolayı makinanın
58 çalışma aralığı JOG yapılırken düşünülmelidir. (1) İşlemden önceki ayarlar JOG işleminden önce, aşağıdaki ayarlamalar gereklidir. S-ON sinyali AKTİF(ON) ise, lütfen PASİF(OFF) duruma getiriniz. Lütfen PA306 ile JOG işlem hızını makineye göre ayarlayınız.. Lütfen acil durumlarda durdurmak için gerekli güvenlik ayarlamalarını yapınız. Güvenliğin sağlandığından emin olmak için acil stop makine tarafında olmalıdır. (2) İşlem adımları JOG işlem adımları aşağıdadır. Aşağıdaki bölüm servo motorun dönme yönünün PA000.0=0 ayarlandığındaki adımları anlatmaktadır. (pozitif yönde dönme). İşlemden sonra Panel Prosedür Tuşlar İşlem Görünümü MOD a basınız veya tuşlarını kullanarak AF02. SET e basarak soldaki resmi(jog arayüzü) görüntüleyiniz İşlem tamamlandı Eğer servo bir işlem yapıyorsa veya ön panel kilidi(af03) kuruluysa,herhangi bir işlem yapılamadığını belirten resim soldaki gibi görünür. Servo AKTİF yapmak için MOD tuşuna basınız. (pozitif dönme ) or (negatif dönme) Tuşlara basılırken PA306 da ayarlanan hıza göre motorlar döner. Servo PASİF yapmak için MOD tuşuna basınız.(motor gücü kesildi) <EK> Kullanıcılar SET tuşuna basarak da JOG işleminden çıkabilir.ayrıca Servo da PASİF olur. SET tuşuna basarak prosedür 2 ye dönülür. 6.5 Ön Panel Kilidi (AF 03) Şifre(Password) ayarı
59 58 olarak ayarlandığında,herhangi bir parametre ve fonksiyon işletilemez. 315 olarak ayarlandığında,bütün parametre ve fonksiyonlar işletilebilir. Başka bir değer atandığında,sadece operating manual deki parametre ve fonksiyonlar yürütülür. İşlemden sonra Panel Prosedür Tuşlar İşlem Görünümü MOD a basınız veya tuşlarını kullanarak AF03 ü seçiniz.. SET e basarak soldaki resmi görüntüleyiniz SET e basarak şifre ayarlarına giriniz. veya tuşlarıyla şifreyi ayarlayınız. SET tuşuna basarak şifreyi kaydediniz ve prosedür 2 ye dönünüz. 6.6 Alarm Günlüğü Silme (AF 04) Alarm günlüğünü siler. Not: Alarm günlüğü bu fonksiyonla silinebilir.fakat alarm reset veya ana devrenin gücünün kapatılması alarm günlüğünü silmez. İşlemden sonra Prosedür Tuşlar İşlem Panel Görünümü 1 MOD a basınız. veya tuşlarını kullanarak 2 AF04 ü seçiniz. 3 SET e basarak soldaki resmi görüntüleyiniz İşlem tamamlandı 6.7 Parametre Sıfırlama (AF 05) Bu fonksiyon parametreleri fabrika ayarlarına döndürür. tuşuna sürekli basarak soldaki resmi görünüz. Soldaki resim yanana kadar basmaya devam ediniz.şekil işlemin tamamlandığını söyler Tuştan elinizi çekiniz,panel soldaki gibi görünecektir. MOD veya SET e basarak prosedür 2 ye dönünüz.

60 Bu ayar Servo PASİF iken uygulanmalıdır.servo AKTİF iken uygulanamaz. Ayarın uygulanabilmesi için servo gücü kesilip tekrar verilmelidir. İşlemler aşağıdaki gibidir. İşlemden sonra Prosedür Panel Görünümü Tuşlar 1 MOD a basınız. 2 3 İşlem veya tuşlarını kullanarak AF05 i seçiniz. SET e basarak soldaki resmi görüntüleyiniz Eğer servo bir işlem yapıyorsa veya ön panel kilidi(af03) kuruluysa,herhangi bir işlem yapılamadığını belirten resim soldaki gibi görünür. tuşuna sürekli basarak soldaki resmi görünüz. Soldaki resim yanana kadar basmaya devam ediniz.şekil işlemin tamamlandığını söyler Tuştan elinizi çekiniz,panel soldaki gibi görünecektir. MOD veya SET e basarak prosedür 2 ye dönünüz. 9 Güç-açıp kapatınız. 10 İşlem tamamlandı 6.8 Offset Komutun Otomatik Kalibrasyonu (AF 06) Komut offseti ototmatik ayarlama,offset ölçüldükten sonra komut voltajını(hız ve tork komutu)otomatik ayarlama metodudur. Ölçülen offset servo sürücüye kaydedilir. Offset komutunun otomatik kalibrasyonu ile ilgili prosedürler aşağıdaki gibi yapılacaktır. İşlemden sonra Prosedür Tuşlar İşlem Panel Görünümü 1 MOD a basınız. 2 veya tuşlarını kullanarak AF06 yı seçiniz. 3 SET e basarak soldaki resmi görüntüleyiniz. 4 5 tuşuna sürekli basarak soldaki resmi görünüz. Soldaki resim yanana kadar basmaya devam ediniz.şekil işlemin tamamlandığını söyler
 Bu fonksiyonda hız komut offseti ayarlanabilir. Panel kullanılarak bu işlemin yapılması aşağıda gösterilmiştir.")
61 6 7 8 İşlem tamamlandı Tuştan elinizi çekiniz,panel soldaki gibi görünecektir. MOD veya SET e basarak prosedür 2 ye dönünüz. 6.9 Hız komut offsetinin elle ayarlanması (AF 07) Bu fonksiyonda hız komut offseti ayarlanabilir. Panel kullanılarak bu işlemin yapılması aşağıda gösterilmiştir. İşlemden sonra Prosedür Tuşlar Panel Görünümü 1 MOD a basınız. İşlem 2 veya tuşlarını kullanarak AF07 yi seçiniz. 3 SET e basarak soldaki resmi görüntüleyiniz. 4 5 Eğer motor çalışıyorsa soldaki resim görüntülenecektir. Press SET again to display the present offset of the speed instruction. 6 Düzenlemek için veya basınız İşlem sonu 6.10 Tork komut offsetinin elle ayarlanması (AF 08) Bu fonksiyonda hız komut offseti ayarlanabilir. Panel kullanılarak bu işlemin yapılması aşağıda gösterilmiştir. SET e basıldığında save yanıp sönecektir ve panel görüntüsü prosedür 2 ye dönecektir. Eğer kullanıcılar değişiklik yapmadan çıkmak isterse MOD a basıp prosedür 2 ye dönebilirler. Prosedür İşlemden sonra Panel Görünümü Tuşlar 1 MOD a basınız. İşlem 2 veya tuşlarını kullanarak AF08 i seçiniz. 3 SET e basarak soldaki resmi görüntüleyiniz. 4 5 Eğer motor çalışıyorsa soldaki resim görünür. SET e basarak şimdiki hız komutunun offsetini görüntüleyiniz.
62 Prosedür İşlemden sonra Panel Görünümü Tuşlar İşlem 6 Düzenlemek için veya basınız İşlem tamamlandı 6.11 Motor Modeli Görüntüleme (AF 09) SET e basıldığında save yanıp sönecektir ve panel görüntüsü prosedür 2 ye dönecektir. Eğer kullanıcılar değişiklik yapmadan çıkmak isterse MOD a basıp prosedür 2 ye dönebilirler. Motor modeli görüntülenerek enkoder tipi ve servo motorun fazı öğrenilebilir.eğer servo sürücü özel özelliklere sahipse seri numarası da görüntülenebilir. İşlem prosedürleri aşağıdaki gibidir.. İşlemden sonra Prosedür Tuşlar Panel Görünümü 1 MOD a basınız. İşlem 2 veya tuşlarıyla AF09 u seçiniz SET e basarak soldaki resmi görüntüleyiniz.ilk harfin d olması sürücü modeli olduğunu gösterir.yanındakilerde sürücü modelini gösterir tuşuna basarak motor modelini görebilirsiniz. F harfi motor olduğunu belli eder. tuşuna basarak enkoder modelini görüntüleyiniz. 0:Mutlak enkoder 1: Tek-dönüş mutlak enkoder 2: line-driver ve artımsal enkoder. E harfi enkoder olduğunu belirtir. 6 7 İşlem tamamlandı SET tuşuna basarak prosedür 2 ye dönülür Servo sürücünün yazılım modelini görüntüleme (AF 10) Servo sürücü ve enkoderin yazılım versiyonunu gösterir.prosedür işlemleri aşağıdaki gibidir. İşlemden sonra Panel Prosedür Tuşlar Görünümü 1 MOD a basınız İşlem veya tuşlarını kullanarak AF10 u seçiniz. SET e basarak soldaki resmi görüntüleyiniz. d1.00 ın alamı DSP yazılım sürümüdür. tuşuna basarak soldaki resmi görüntüleyiniz. F 1.03 ün anlamı FPGA software version is
63 Prosedür 5 İşlemden sonra Panel Görünümü Tuşlar İşlem sürümü 1.03 tür. MOD veya SET e basarak prosedür 2 ye dönünüz. 6 İşem tamamlandı Mutlak enkoder değeri ayarlama (AF 11) Bu fonksiyon sadece mutlak enkoder bağlıyken çalışır,generl olarak aşağıdaki durumlarda kullanılır. Mutlak enkoderlı motor ilk kez kullanılırken; İlgili enkoder alarmı varken; Çok dönüşlü mutlak değer enkoder değeri 0 ayarlandığında; Not: 1. Enkoder ayarı sadece servo PASİF iken çalışır; 2. Mutlak değer enkoder ile ilgili alarm varken alarm sadece bu işlemle durdurulabilir ve (A-RST) alarm reset sinyali bu alarmları durduramaz; 3. Bu işlem bittiğinde;lütfen alarm olup olmadığını anlamak için güç kapa-aç yapınız. 4. İşlem bittikten sonra,mutlak enkoderin çok dönüşlü değeri 0,ve mutlak enkoder ile ilgili alarmlar temizlenmiş olur. İşlemden sonra Prosedür Tuşlar İşlem Panel Görünümü 1 MOD a basınız veya tuşlarını kullanarak AF11 i seçiniz. SET e basarak soldaki resmi görüntüleyiniz. tuşuna sürekli basarak soldaki resmi görünüz. Soldaki resim yanana kadar basmaya devam ediniz.şekil işlemin tamamlandığını söyler MOD veya SET e basarak prosedür 2 ye dönünüz. 7 Güç-açıp kapatınız. 8 İşlem tamamlandı 6.14 Yük Ataletinin Manuel Algılanması (AF 15) Yük ataletinin manuel algılanmasının anlamı servo sistemin manuel olarak yük ataletini algılama işleminin bitmesidir. Yük atalet işleminde overtravel koruma fonksiyonu aktif değildir.bundan dolayı
64 makinanın çalışma aralığı yük atalet algılama işlemi yapılırken düşünülmelidir. (1) İşlemden önceki ayarlar Yük ataleti algılama yapılmadan önce aşağıdakiler uygulanmalıdır. -S-ON sinyali AKTİF(ON) ise, lütfen PASİF(OFF) duruma getiriniz. -Lütfen PA300.2 ile JOG alınan mesafe ayarını makineye göre ayarlayınız. -Lütfen acil durumlarda durdurmak için gerekli güvenlik ayarlamalarını yapınız. -Güvenliğin sağlandığından emin olmak için acil stop makine tarafında olmalıdır. (2) İşlem Prosedürleri Aşağıda işlem prosedürleri verilmiştir. İşlemden sonra Prosedür Tuşlar Panel Görünümü 1 MOD a basınız. İşlem 2 veya tuşlarını kullanarak AF05 i seçiniz. SET e basarak soldaki resmi görüntüleyiniz Eğer servo bir işlem yapıyorsa veya ön panel kilidi(af03) kuruluysa,herhangi bir işlem yapılamadığını belirten resim soldaki gibi görünür. MOD a basarak yük ataletini manuel algılar. Algılama sırasında,algılama durdurulmak istenirse,kullanıcı SET e basarak çıkış yapabilir. Algılamadan sonra panel yük ataletini gösterir.birimi kg.cm 2 dir. MOD veya SET e basarak prosedür 2 ye dönünüz. 9 İşlem tamamlandı

65 Bölüm VII Test Uygulaması 7.1 Test uygulamasından önce dikkat edilmesi gereken denetlemeler ve hususlar Güvenliğin sağlandığından emin olmak ve test uygulamasını doğru yürütmek için, lütfen aşağıdaki konuları önceden kontrol edip doğruluğundan emin olunuz.. Proje İçerik Motorun yükten ayrılıp ayrılmadığını Kablolamanın ve bağlantının doğru olup olmadığını Bağlantı yerlerinin gevşek olup olmadığını Servo motor Eğer servo motor frenliyse, frenin önceden ayrılıp ayrılmadığını kontrol ediniz.fren ayrıldığı zaman, mutlak voltaj frene etki edebilir. Kablolamanın ve bağlantının doğru olup olmadığını Servo sürücü Servo sürücünün besleme voltajının normal olup olmadığını 7.2 JOG operasyonunu panelden yönetmek Önümüzdeki kısımda JOG operasyonunu panelden kullanmak için prosedürleri tanıtacağız. JOG operasyonu, yüksek bir cihaza bağlanmadan hız kontrolüyle servo motorun işini yaptığını doğrulayan bir fonksiyondur. JOG operasyon sırasında, overtravel koruma fonksiyonu devre dışıdır. Makinenin operasyonunun menzili operasyon sırasında dikkate alınanarak kullanılmalıdır. (1) Operasyondan Önceki Ayarlar JOG operasyonundan önce, aşağıdaki ayarların yapımı zorunludur. S-ON giriş sinyali aktif(on) ise, lütfen OFF(pasif) durumuna getiriniz. Lütfen JOG hızını makinenin operasyonunun menzilini düşündükten sonra ayarlayınız. JOG operasyon hızı PA306 dan ayarlanabilir. (2) Operasyon prosedürleri JOG operasyon adımlarını aşağıda bulabilirsiniz.aşağıdaki bölümde servo motorun dönüş yönü PA000.0=0 ayarlandığında uygulanacak prosedürler verilmiştir (Pozitif dönme için aşağıdaki adımları takip ediniz.). Prosedür İşlemden sonra paneldeki görüntü Kullanılan Tuşlar Operasyon 1 Ek(Aux) fonksiyonları seçmek için MOD tuşuna basınız. 2 Parametre numarası AF 02 değilse, görmek için veya tuşuna basınız JOG operation arayüzüne erişmek için SET tuşuna basınız.panelde yandaki şekil görülür. 3 Not:"Yazma korumalı" ayarı varsa, paneled "no_op" görülür. Lütfen,ilk olarak yazılabilir durumu "AF03" ten değiştiriniz.
66 Prosedür İşlemden sonra paneldeki görüntü 8 Operasyon sonu Kullanılan Tuşlar Operasyon MODE a basarak Servo aktif (ON) yapılır. (Motora güç verilir). En sağ noktanın nixie görüntü tüpü yanar, bunun anlamı motor tahrik edilmiş olur tuşuna (pozitif yönde dönme) veya tuşuna (negative yönde dönme) basınız. Tuşlara basıldığında, servo motor PA306 da ayarlanmış Servo OFF durumuna hıza göre döner. geçmek için MOD tuşuna basınız.(motor gücü kesilir). <EK> Kullanıcılar ayrıca SET tuşuna basarak da JOG dan çıkabilirler(servo pasif olur). SET e basılarak ek fonksiyonundan çıkılır ve prosedür 2 ye dönülür. 7.3 Servo Motorların PLC veya Motion Kontrolcüyle Çalışma Uygulaması Bu uygulamadan önce aşağıdaki durumları doğruladığınızdan emin olunuz. Proje İçerik Hareket yönergeleri ve servo motorun giriş-çıkış sinyalini, kontrolcüden 1 servo motora gelen girişin doğru olup olmadığını kontrol ediniz. Kontrolcüyle servo motor arasındaki bağlantının doğruluğunu ve 2 polaritesinin doğru ayarlanıp ayarlanmadığını kontrol ediniz.. 3 Servo sürücünün doğru çalışıp çalışmadığını kontrol ediniz Giriş sinyal döngüsünün bağlantısı ve durum(status) doğrulama Kontrolcü ile hız ve pozisyon kontrollerinin test edilebilmesi için aşağıdaki prosedürleri uygulayınız. Lütfen bağlantı ve giriş sinyallerinin durumlarını aşağıdaki prosedürlere göre doğrulayınız. Prosedür Operasyon Referans bölümleri 1 Lütfen giriş sinyal bağlantılarını giriş-çıkış sinyal konnektörü olan CN2 ye bağlayınız.aşağıdaki durumlar bağlama esnasında önerilir. Giriş sinyali Servo ON (S-ON) giriş için uygun olmalıdır. Pozitif limit (POT), negative limit (NOT) ve Giriş sinyalini ON (L level) tersleyiniz..(pozitif dönme ve ters yönde dönme kullanılabilir hale gelir.) 2 3 Kontrolcünün konnektörünü giriş-çıkış sinyali için (CN2) ye bağlayınız. Servo sürücüye enerji veriniz. Panelde "Power ready" yazısını görünüz. Giriş sinyalinin durumunu giriş parametresinden doğrulayınız. (dp012). 4.3
67 4 5 S-ON giriş sinyalini ON durumunda tutunuz. Panelden "ekran" durumunun düzgün çalıştığını kontrol ediniz. 4.3 Böylece test uygulaması hazırlıkları tamamlanmış oldu.lütfen test uygulamasına kontrol modları altında devam ediniz Pozisyon Kontrolüyle Test Uygulaması Bu bölümde pozisyon kontrolüyle ilgili test uygulamasını bulabilirsiniz.temel olarak pozisyon kontrolü için giriş sinyali takıldıktan sonraki test uygulamasının prosedürleri aşağıda verilmiştir. Prosedür Operasyon Referans Bölümleri 1 Güç kaynağı ve giriş sinyal bağlantısını tekrar doğrulayın ve sonra servo sürücünün güc kaynağı kontrol edilir Kontrolcünün çıkış pulse açısına göre PA200.0 kullanılarak komut pulse açısı ayarlanır Kontrolcüye göre, PA205 ve PA206 elektronik dişli oranını ayarlamak PA210 ise frekans bölmenin sayısını ayarlamak için kullanılır Güç tekrar açılır. Prosedür 3 teki parametreler aktif hale getirilir. Servo sürücünün ana çevrim güç beslemesi açılır (S-ON) giriş sinyali aktif edilir Kontrolcünün düşük hız pulse komutu çıkışından motor dönüşü kolayca doğrulanabilir. (örnek olarak: 1 dönüş). Pulse değişimlerini öncesinde ve sonrasından görüntüleyiniz, verilen komut giriş komut pulse sayıcısına göre çıkar(dp003 ve dp004), bu doğrulamaya göre servo sürücüye komut pulse sayısı girilir. Pulse değişimlerini öncesinde ve sonrasından görüntüleyiniz, verilen komut, pulse sayıcısnın geri-beslemesine (feedback) göre çıkar (dp003 ve dp004), buna göre servo sürücüye girilen komut pulse sayısı doğrulanır. Servo motorun verilen komutun yönüne dönüp dönmediği doğrulanır. Sürücü bağlantılarında geri besleme bağlantıları yapılmışsa, geri 10 besleme darbe değerlerinin beklenen değerler ile uyuşup uyuşmadığına bakılır. 11 Geri-besleme pulse sayısı=(dp01*10000+dp02) *PA210*4 Enkoder Pulse komutlarını çözünürlüğü durdurup servoyu pasif (OFF) durumuna getiriniz Hız kontrolüyle Test Uygulaması Bu bölümde hız kontrolü ile ilgili test uygulamasını bulabilirsiniz. Temel olarak hız kontrolü için giriş sinyali takıldıktan sonraki test uygulamasının prosedürleri aşağıda verilmiştir. (lütfen Bağlantılar ve Giriş Sinyal Devrelerinin Durum Kontrolü nü referans alınız). Prosedür Operasyon Referans Bölümleri 1 Güç kaynağı ve giriş sinyal bağlantılarını tekrar doğrulayın ve sonra servo sürücünün güc kaynağı kontrol edilir Hız komut giriş kazancını ayarlayınız.(pa301) Servo sürücünün ana devre güç kaynağını açınız. 4 Hiz komut girişinin (V- REF ve AGND arasındaki voltaj) 0 V olduğunu doğrulayınız.,ve sonra giriş sinyali servoyu(s-on) aktif durumuna getiriniz
68 Prosedür Operasyon Hız komut giriş voltajı (V-REF ve AGND arasındaki voltaj) 0V dan yavaşça artırılır. Hız komut değerini (analog voltaj),hız komut monitörünü kullanarak doğrulayınız. (dp07). Motor hızını (rpm) motor hız monitörünü kullanarak doğrulayınız. (dp00). Prosedür 6 ve 7 deki değerleri (dp07 and dp00) dönüşüm ilişkisine göre uyumluluğunu doğrulayınız. Servo motorun verilen komutun yönüne dönüp dönmediği doğrulanır. Hız komut girişini 0V yapınız, ve servoyu pasif(off) yapınız.böylece hız uygulaması tamamlanmış olur. Referans Bölümleri Servo Motorun Makine ile Test Uygulaması Servo motor test uygulamalarını ayrı ayrı geçtikten sonra, servo motoru makineye bağlayarak aşağıdaki test uygulaması yapılır. Prosedür Proje Operasyon 1 Parametre ayarı 1 Sisteme enerji veriniz.daha sonra güvenlik fonksiyonları, yüklenme(overtravel) ve fren koruma fonksiyonlarına göre ayarlamalar yapılır. Referans Bölümleri Parametre ayarı 2 3 Yükleme 4 Kontrol 5 Operasyon 6 Ayarlama 7 S-ON Sinyal Girişi Kullanılan kontrol moduna göre gerekli parametreler hazırlanır. Gücü kesiniz ve servo motoru bağlantı yerlerinden(coupling) bağlayınız. Kontrolcünün gücünü açınız, ve servo sürücünün servosunu OFF durumuna getiriniz, ve sonra Prosedür1 deki koruma fonksiyonlarının ayarlanıp ayarlanmadığını kontrol ediniz. "7.3 e göre test uygulamasını yapınız.buradaki test sonuçları ile 7.3 teki test sonuçlarının aynı olduğunu doğrulayınız. Servo kazancını istenen şekilde ayarlayınız ve servo motorun cevap(response) karakteristiğine göre ayarlayın. Not: Test sırasında,servo motor başlangıçta makineye adapte olmayabilir.lütfen defalarca deneyerek birbirlerine adapte olmasını sağlayınız. Test uygulaması sonlandırılır.
69 7.5 Frenli Servo Motor Test Uygulaması Bu bölümde frenli motor test uygulaması anlatılmıştır. Proje İçerik Bu uygulama yürütülürken fren eylemi onaylanmadan önce, mekaniğe bağlı olan düşme 1 titreme gibi etmenler hesaplanmalıdır. 2 3 Bu uygulama yürütülürken, lütfen ilk olarak servo motorun hareketini ve freni servo motoru makineye bağlanmadan önce doğrulayınız.. Eğer bir problem yoksa servo motoru makineye bağlayarak testi yürütebilirsiniz. Lütfen servo sürücünün fren kenetleme çıkış sinyalini(bk)kullanarak servo motorun frenini kontrol ediniz..
70 Bölüm VIII İşleyiş 8.1 Kontrol Modu Seçimi Bu bölümde EPS-B1 Serisi servo sürücünün kontrol modları aşağıdaki tabloda anlatılmıştır. Kullanıcı Parametresi h. 0 [Fabrika ayarları] Kontrol Modu Pozisyon kontrol(pulse komutu) Servo motorun pozisyonu pulse pozisyon komutu ile yapılır.pozisyongiren pulse sayısı ile kontrol edilir ve hız giriş pulse nin frekansı ile kontrol edilir. Referans Bölümü 8.4 h. 1 Hız Kontrol(voltaj komutunun analog miktarı) Analog voltaj hız komutunun miktarıyla servo motorun dönüş hızı kontrol edilebilir.aşağıdaki durumlarda kullanınız. Dönme hızını kontrol ederken Servo sürücünün enkoder pulse çıkışı ve kontrolcü için pozisyon kontrolde pozisyon loop kurmak için kullanılır. 8.5 PA000 h. 2 Tork Kontrol(voltaj komutunun analog miktarı) Analog voltaj tork komutunun miktarıyla servo motorun çıkış torku kontrol edilebilir. 8.6 h. 3 Hız Kontrol (dahili hız seçim ayarı) INSPD0, INSPD1 ve INSPD2 giriş sinyalleri kullanılarak servo sürücünün yürütme hızı P8 ile hız kontrol yapılır.burada analog miktar komutuna ihtiyaç yoktur. 8.7 h. 4 ~ h. 9 h. A Switch model yukarıda anlatılan 4 kontrol modla birlikte kullanılır.,kullanıcılar istedikleri modu seçerek kullanabilirler. 8.8 Pozisyon Kontak Kontrolü (dahili pozisyon kontrolü) Kontrolcü olmadan sistem pozisyonu kontrol edilebilir. 8.2 Genel Basit Fonksiyonların Ayarları Servo AKTİF ayarı Servo AKTİF ayarı (S-ON) motorun çalışıp çalışmadığı ile ilgili komuttur. (1) Servo AKTİF sinyali (S-ON) Tip Sinyal Durum Giriş Seviyesi Açıklama Servo motor aktif olduğunda (servo AKTİF 2CN-40: L seviyesi AKTİF) uygulanır. Giriş S-ON Servo motor pasif olduğunda (servo PASİF 2CN-40: H seviyesi AKTİF) uygulanır. (2) S-ON sinyalinin giriş seviyesinin seçimi Giriş seviyesi kullanıcı parametresinden seçilebilir,servo AKTİF sinyalini aktiflik seviyesi
71 2CN40 ile değiştirilebilir. Kullanıcı parametresi PA508 b. 0 b. 1 Açıklama 2CN-40 giriş terminalinden gelen S-ON sinyali düşüktür. (fabrika ayarları) 2CN-10 giriş terminalinden gelen S-ON sinyali yüksektir Motor dönüş yönünün değiştirilmesi Servo sürücü motorun herhangi bir bağlantısını değiştirmeden motorun dönüş yönünü değiştirebilir. "Pozitif dönüş yönü" normalde saatin yönünün tersine(ccw) olarak ayarlanmıştır. "Negatif dönüş yönü sadece motorun dönüş yönünü değiştirir,saatin tersine dönme yerine(+.-)yi değiştirerek saat yönüne doğru dönmeyi sağlar.fakat servo sürücü çıkış sinyalinin enkoder pulse nin polaritesi gibi diğer hiçbir çıkış sinyalini değiştirmez. Kullanıcı Parametresi Açıklama Overtravel (OT) Pozitif dönme komutu h. 0 Standard ayar (CCW yönünde pozitif dönme komutu) (fabrika ayarları) Ters Dönme Komutu Pozitif dönme: POT ile durdur Negatif dönme: NOT ile durdur PA000 h. 1 Ters Dönme Modu(CW yönünde pozitif dönme komutu) Ters Dönme Komutu Pozitif dönme komutu Negatif dönme: NOT ile durdur Negatif dönme: NOT ile durdur r e v e r s e r : e tv he r os ue : g h t h r o u g h
72 8.2.3 Overtravel Ayarı Overtravel,makinenin hareket edeceği uzaklılığı aştığında,servo motoru durdurmak için limit switch i AKTİF eden bir güvenlik fonksiyonudur. Uyarı Limit Switch in Kurulumu Doğrusal harekette,limit switch makine hatalarını önlemek için kurulur. Limit switch i bağlantısı kopmuş veya sıkı değilse,lütfen motorun güvenli çalışması için normal kapalı kontak kullanınız. Servo Motorun Dikey Eksende Kullanımı Overtravel durumunda,iş düşebilir;işin düşmesinden korunmak için,overtraveldayken servo motor sıfır-pozisyon durumuna ayarlanmalıdır. (1) Overtravel sinyal bağlantısı Overtravel fonksiyonu aktif etmek için, lütfen overtravel limit switchlerinin giriş sinyalini serco sürücüdeki CN2 konnektörünün uygun pinlerine bağlayınız. Tip Sinyal Durum Giriş Seviyesi Açıklama Pozitif dönüşe izin verildi Giriş POT CN2-42 (fabrika ayarları) ON=L seviyesi (normal işlem) Pozitif dönüş engellendi(pozitif OFF=H seviyesi dönüşte overtravel) Giriş NOT CN2-43 (fabrika ayarları) ON=L seviyesi OFF=H seviyesi Ters dönüşe izin verildi(normal işlem) Ters dönüş engellendi(pozitif dönüşte overtravel) Doğrusal harekette,mekanik hataları önlemek için,lütfen limit switchi aşağıdaki figure bağlı olarak bağlayınız. Overtravel durumda dahi,ters yönde sürüşe izin verilir. Örnek olarak,overtravel pozitif tarafta olduğunda,ters yöne dönüşe izin verilir.
73 Motor forward rotation direction Servo motor Limit switch Limit switch Servo driver Önemli * Pozisyon kontrolünde,motor overtravel ile durmaya zorlanırsa,pozisyon sapma pulse i saklanabilir. Bunu temizlemek için sinyal temizleme(clr) kullanılır. * POT ve NOT sinyalleri özgürce giriş konnektör pinlerine kullanıcı parametreleri ile dağıtılabilir.detaylar için IO sinyal dağıtımını inceleyiniz. * POT ve NOT sinyallerini kullanmadan önce,lütfen PA003.0 ve PA003.1 i 0 olarak ayarlayınız. (POT ve NOT sinyallerini aktif yapma). * Azalma durumunda (2) Over-travel fonksiyonu kullanıldığında motorun durma şeklinin seçimi Overtravel sinyalleri(pot ve NOT) servo sürücüye geldiğinde,motorun durma şekli seçimi aşağıda anlatılmıştır. Kullanıcı Parametresi Motor Motor durduktan Anlamı durdurma şekli sonra DF ile hızlı durur;servo motor durduktan d. 0 sonra başlangıç işleyiş (power-off) d. 0 durumu ile kalkar. Dinamik fren Başlangıç işleyişi ile durur(doğal duruşu); d. 0 (DF) ile Başlangıç işleyiş servo motor durduktan sonra başlangıç d. 1 durdurma durumu işleyiş (power-off) durumu ile kalkar. PA001 d. 0 d. 2 Başlangıç durumu ile durdurma Başlangıç işleyişi ile durur(doğal duruşu); servo motor durduktan sonra başlangıç işleyiş (power-off) durumu ile kalkar. d. 1 d. 2 Azalarak durdurma Sıfır-hız durumu Başlangıç işleyiş durumu Acil stop torku(pa406) ile durur.servo motor durduktan sonra sıfır-hız durumuna(servo kilit) geçer. Acil stop torku(pa406) ile durur.servo motor durduktan sonra sıfır-hız durumuna(servo kilit) geçer. Kullanıcı parametreleri güç kapa-aç yaptıktan sonra aktif hale gelir. Ayar n. 2 başlangıç işleyişi olduğunda,eğer servo AKTİF sinyali alınırsa,servo motor sadece motorun hızı 0 olduğunda kontrol edilebilir. Sözlük DF: Dinamik Fren (servo sürücünün dahili devresinin kısa devre olması). Dahili işleyiş durdurması: Motor dönerken sürtünmeli bir direnç üretilirse DF yerine kullanılaır ve motor doğal olarak durur.
74 Azalarak durdurma: Azalama(fren) torkuyla durdurma Sıfır-Hız Durumu: Pozisyon komutu 0 dır.sıfır-hız durumunda,pozisyon sapması otomatik olarak silinir. * Servo PASİF ve alarmda durdurma için,lütfen Servo PASİF durumunda durdurma metodu seçme bölümünü inceleyiniz. (3) Overtravel sinyalini Devreye Alma Kullanıcı Parametresi Açıklama b. 0 Pozitif limit(pot) sinyali aktif b. 1 Pozitif limit (POT) sinyali pasif (fabrika ayarları) PA003 b. 0 Negatif limit(not) sinyali aktif b. 1 Negatif limit (NOT) sinyali pasif (fabrika ayarları) (4) Overtravel da Acil Stop Torku Acil Stop Torku PA406 Ayar Aralığı Ayar birimi Fabrika Ayarı Etki zamanı 0 ~ 300 1% 300 Hemen Overtravel sinyallerinde motorun durması için torku ayarlayınız. Ayar birimi nominal torkun % sidir. (nominal tork 100% dür.) Acil stop torku motorun maximum torkunu(acil stop torku çıkışı motorun verebileceği max. torktur) aşarsa kullanılır.acil stop torku çok küçükse,yavaşlarken E.28 alarmı verebilir Fren Ayarları Fren servo motor dikey eksende sürülüyorsa kullanılır. Servo sürücünün gücü kapalıyken, fren servo motorun yer-çekimine karşı durmasını sağlar.(lütfen 7.5 Servo motorun frenle test uygulaması bölümünü inceleyiniz. 1. Servo motorun freni özel uyarımsız tipte bir tutma frenidir.frenleme için kullanılamaz,sadece motoru tutmak için kullanılabilir.fren torku servo motor torkunun yaklaşık %80 i kadardır. 2. Eğer servo motoru aktif etmek için sadece hız döngüsü kullanılıyorsa,fren
75 fonksiyonlarında,servo PASİF yapınız ve giriş komutu 0V olmalıdır. 3. Pozisyon döngüsünde mekanik frenin bir fonksiyonu yoktur.(çünkü servo motor durduğunda servo kilit durumuna geçer.) (1) Bağlantı Örneği Servo sürücünün ardışık çıkış sinyali (BK) ve fren güç beslemesi frenin AKTİF/PASİF olmasını belirler.standart devre aşağıdaki gibidir. Not: 1. BK-RY: fren kontrol röleleri 2. Güç beslemesini değiştirirken oluşan akım frene göre belirlenir;değişik frenler değişik çalışma akımlarına sahiptir.normalde, DC24V un güç beslemesini değiştirmek 1A den fazla akım sağlar. 3. Frenin DC24V girişi yönle sınırlandırılıamaz. Fren gecikme aksiyon zamanına sahiptir,lütfen aşağıdaki figürü aksiyonun AKTİFLİK ve PASİFLİK durumunun sırası için referans alınız.
76 Servo ready Servo-on Brake signal Braking of brake Actual state of the brake Release of brake Brake *1. Frenin aktif olmasından frenin bırakılması arasındaki fark frenden frene değişir. *2 PA518 parametresinin değeri (2) Fren kenetleme çıkışı Tip Sinyal İsmi Konnektör Pini Ayar Anlamı Dağıtıma ihtiyacı ON=Lseviyesi Fren bırakılması Çıkış BK var ON=H seviyesi Frenin kullanılması Servo motorun frenle kullanılması fren çıkış sinyalinin kontrol edilmesini gerektirir.ek olarak çıkış sinyali fabrika ayarlarında kullanılabilir değildir.yani,çıkış sinyali(pa510)'nun dağıtılması gerekir.frensiz motor ile bağlamayınız. Önemli Overtravel durumunda,servo motor kapatılsa bile,bk sinyali çıkışta olmaz. (3) Fren sinyalinin (BK) dağıtılması Fren (BK) sinyali öntanımlı olarak DO4 (CN2-25, CN2-26) sinyaline dağıtılır. Kullanıcı Parametresi Konnektör Pini Açıklama + Terminal - Terminal PA510 n.3 CN2-29 CN2-30 Çıkış terminalleri CN2-29 ve CN2-30 BK sinyalinin çıkışı n.3 CN2-27 CN2-28 Çıkış terminalleri CN2-27 ve CN2-28 BK sinyalinin çıkışı n.3 CN2-25 CN2-26 Çıkış terminalleri CN2-25 ve CN2-26 BK sinyalinin çıkışı Önemli Servo sürücünün diğer çıkış sinyalleri dağıtım metodları için"3.4.3 IO sinyal dağıtımı bölümünü inceleyiniz." (4) Fren AKTİF zamanlama ayarı(motor durduktan sonra) Normalde,BK sinyali S-ON sinyali PASİF olduğunda çıkışa verilir,fakat kullanıcılar Servo PASİF olma zamanını parametre ile değiştirebilirler. Fren Komutu-Servo PASİF gecikme zamanı PA518 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı 0 ~ 500 ms 100 Dikey eksende,frenin aktif olma zamanından dolayı, makinenin hareketli parçaları bazen harici kuvvete veya yüke bağlı olarak hafifçe hareket edebilir.bu hareket belki Servo PASİF gecikme ayarıyla düzeltilebilir. Bu parametre motor durduğunda Fren AKTİF zamanlamasını değiştirebilir. Servo motorun dönüşü sırasında fren aksiyonu için "8.2.4(5) " bölümüne bakınız.
77 Servo-on input (S-ON) Brake output (BK) Brake released Braking of brake Önemli Alarm verildiğinde servo motor aniden PASİF olur ve parametre ile değiştirilemez. Makinenin hareketli parçaları bazen harici kuvvete veya yüke bağlı olarak hafifçe fren fonksiyonundan önce hareket edebilir. (5) Fren AKTİF zamanlaması (servo motor dönerken) Servo OFF durumundayken servo motorun dönmesi için verilen halt komutu veya alarm,bk sinyalinin çıkış şartları aşağıdaki parametrelere göre değiştirilebilir. Fren Komutu Aksiyon Hızının Limiti PA519 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 0 ~ 1000 rpm 100 Hemen Servo OFF Fren Komutu Bekleme Zamanı PA520 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 100 ~ ms 500 Hemen Bk sinyali aşağıdaki şartlarda aktif olur.bk sinyali H seviyesine ayarlanır.(fren start) Servo OFF olduğunda motor hızı PA519'un altında olursa Servo OFF olduğunda PA520'nin ayar zamanı aşarsa Servo-on ON) input (S- Motor speed Motor speed Brake signal output (BK) Actual state of Brake ON Brake brake OFF Önemli PA519 servo motorun dönebileceği hızın üzerine ayarlansa bile,servo motorun kendi maksimum hızının üzerine çıkamayacaktır.
78 8.2.5 Servo PASİF iken durma için metod seçimi Servo PASİF iken servo sürücüsünü durdurma yöntemleri aşağıda verilmiştir. Kullanıcı Parametresi durduktan sonra Servo motor Servo durdurma motor Açıklama PA001 d. 0 d. 1 d. 2 DB durdurma Ataletle durdurma DB tutması Atalet durumu Atalet durumu Dinamik frenle(db) durur,servo motor durduktan sonra DB durumunu korur. Dinamik frenle(db) durur,servo motor durduktan sonra atalet durumuna geçer. Atalet durumu ile durur,servo motor durduktan sonra atalet durumuna geçer. UAşağıdaki durumlarda,kullanıcı parametreleri aktif olur. S-ON giriş sinyali PASİF (servo PASİF) Alarm verilirse Ana güç kaynağı kapatılırsa (L1, L2 and L3) Yukardaki ayar "d. 0 ile DB ile durduktan sonra DB durum koruma", eğer servo motor durursa veya düşük hızda dönerse, başlangıç durumunda olduğu gibi bir fren kuvveti üretilmeyecektir. Sözlük DB dudurma: Dinamik fren ile durdurmayı gösterir. Ataletle durdurma:fren yerine motorun dönüşünden kaynaklanan sürtünme kuvvetiyle kendi kendine durmasıdır. Dinamik Fren(DB) acil durdurma gerektiğinde kullanılır. Servo motorun sıklıkla gücü AÇ-KAPA veya S-ON sinyali kapatılıp açılması servo sürücünün iç devresinin elemanlarının eskimesine neden olacaktır.lütfen servo sürücüyühız ve pozisyon kontrolüyle başlatıp durdurunuz Güç kaynağı kesme ayarı Servo sürücünün ana devre voltaj kaynağı anlık olarak kesildiğinde,motorun servo PASİF durumuna ayarlanmasıyla ilgili ayardır. Güç kaynağı kesmesi tutma zamanı PA521 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 40 ~ 800 1ms 60 Güç kaynağı kesmesinin algılanması ana güç-kaynağının AÇIK-KAPALI olduğunu kontrol etmektir. Eğer KAPALI AÇIK resetleme zamanı kullanıcı parametresinin altındaysa durum korunur. Fakat aşağıdaki durumlarda,kullanıcı parametresinin ayar değeri aktif olmayacaktır. Servo motorun yükü çok fazlaysa,bu güç kaynağı kesmesinde "alçak gerilim uyarısı(a.96)" na neden olacaktır. Kontrol güç kaynağı güç kontrol kaynağı periyodunda kontrolden çıktıysa(güç KAPALI uygulamasının aynısı)
79 Have interrupt power-supply Power voltage supply Power off time (t) When PA521>t Servo ON Go on operating Stop operating Önemli Maksimum bekleme süresi ayarı güç kaynağı kesmesinde 800 ms'dir.,fakat servo motorun güç kaynağı bekletme süresi 200 ms'dir.ana devre güç kesmesinin bekleme süresi servo sürücünün çıkışına göre farklılık gösterir. Lütfen servo sürücüyü kesme güç kaynağının bekleme süresinin üzerinde kontrol ederken UPS kullanınız. 8.3 Mutlak Enkoder Kullanma Metodu Eğer servo motor mutlak enkoderla kullanılıyorsa,mutlak değer algılama sistemi, komut kontrol birimiyle ayarlanabilir.böylelikle tekrar güç verildiğinde,motor hatasız olarak çalışır. Mutlak enkoder çeşidi Çoklu dönüş mutlak enkoder Çözünürlük 17 bit Çoklu dönüş verisinin aralığı ~ Limitten sonraki olay Pozitif dönüş değeri(+32767)'yi geçtiğinde, çoklu dönüş değeri olur. Negatif dönüş değeri(-32767)'yi geçtiğinde, çoklu dönüş değeri olur Mutlak enkoder seçimi Parametre Açıklama Mutlak enkoderı artımsal olarak kullanır.(fabrika ayarı) d. 0 PA002 d. 1 Mutlak enkoderi mutlak enkoder olarak kullanır. Artımsal enkoder olarak kullanıldığında,aci durum bataryasına gerek yoktur. Parametreler değiştirildikten sonra aktif olabilmesi için motorun kapatılıp açılması gerekmektedir Batarya Kullanma Metodu Güç kapalı olsa bile,bataryanın back-up'a ihtiyacı vardır,yani enkoderin mutlak değeri pozisyon bilgisi olarak kaydedilir. (1) Batarya seçimi Lütfen batarya seçimi yaparken komut kontrol birimine göre seçim yapınız.batarya,
80 ER3V (3.6V, 1000mA TOSHIBA battery) un özelliklerine sahip olması gerekmektedir. (2) Bataryanın Takılması Batarya takılırken polariteye dikkat ediniz Batarya değişimi Batarya 3.1 V un altına düştüğünde servo sürücü A.97 (17 bit seri enkoder batarya ikazı) alarmını verecektir,fakat bu uyarı sadece servo sürücünün gücü açılırken verilir.yani bataryta gücü azsa ve o an çalışıyorsa alarm verilmez.kullanıcı parametresiyle batarya düşük voltaj uyarısı ayarlanabilir. -Batarya Değiştirme Prosedürleri 1. Lütfen bataryayi değiştirirken Servo sürücünün kontrol gücü AÇIK olsun. 2. Bataryayı değiştirdikten sonra,lütfen servo sürücünün gücünü kapatınız,böylece A.97 hatası silinmiş olur. 3. Anormal bir durum yoksa servo sürücüyü yeniden başlatınız,böylece batarya yeniden başlamış olur. Servo sürücünün kontrol güç kaynağı kapalı ve batarya bağlantısı çıkarılırsa mutlak enkoder içindeki bilgi kaybolur.yani mutlak enkoder ayarı çok önemlidir.lütfen "8.4.5 " bölümündeki AF011 ile ilgili bölümü referans alınız AF011 Mutlak Enkoder Ayarı Aşağıdaki durumlarda bu ayarın yapılması gereklidir. Makina başlatıldığında "17-bit seri enkoder batarya alarmında (A.97)" E55 ile E62 arasındaki alarmlarda Mutlak enkoderin çoklu dönüş verisi 0 olarak ayarlandığında (7.13'ü referans alınız). 8.4 Pozisyon Kontrol İşlemi Kullanıcı parametresi ayarları Pulse grubu pozisyon kontrolünde kullanıldığında,aşağıdaki parametreleri takip ediniz. (1) Kontrol Mod Seçimi Parametre Açıklama PA000 h. 0 Kontrol mod seçimi: Pozisyon Kontrol(pulse grubu komutu) (2) Pulse instruction form selection
81 Giriş Tip Yavaş Hız Pulse Giriş kanalı Yüksek Hız Pulse Giriş kanalı Sinyal İsmi Konnektör pin numarası PULS+ CN2 7 Komut pulse girişi PULS+ CN2 8 Komut pulse girişi SIGN+ CN2 11 Sinyal girişi SIGN- CN2 12 Sinyal girişi HPULS+ CN2 16 Komut pulse girişi HPULS- CN2 17 Komut pulse girişi HSGN+ CN2 23 Sinyal girişi HSING- CN2 24 Sinyal girişi Sürücü tarafında girişleri ayarlamak için PA200.0 ve PA200.1'i kullanınız. Parametre Komut Tipi Komut İletimi Ters Komut d. PA200 0 d. 1 + Sembol Pulse grubu (Pozitif mantık)(fabrika Ayarları) CW + CCW (Pozitif Mantık) H level L level L level L level d. 2 90º faz farkı d. 0 d. 1 Symbol + Pulse train (Negative logic) CW+CCW (Negative logic) L level L level H level L level d. 2 90º faz farkı (2 faz pulse) (3) Temizleme İşlemi Seçimi Diğer durumlardan farklı olarak sinyal temzilemede(clr),servo sürücünün durumuna göre timed temizleme sapma pulse'i seçilebilir.sapma pulse'nin aksiyon modu PA200.2 parametresi kullanılarak aşağıda verilmiştir. Parametre İçerik Sapma pulse'i bast modül ve CLR sinyali ile temzilenir.(fabrika ayarları). d. 0 Basit modülün anlamı S-ON sinyali PASİF'e ayarlanmış,ana güç kapalı ve alram verilmiş demektir. PA200 d. 1 Sapma pulse'i silinmez.sadece CLR sinyali ile silinir. Sapma pulse'i sadece alarm verildiğinde veya CLR sinyali ile silinir. d. 2 (4) Giriş kanalı Komut pulse seçimi PA200.3 parametresinin ayarlanması giriş kanalı pulse'i seçilir. Kulanıcı parametresi İçerik PA200 d. 0 PULS ve SIGN girişi(yavaş hız pulse kanalı)
82 Bu kanaldaki pulse girişi optik bağdaştırıcı tarafından alınır.kontrolcünün kollektör çıkışı ve uzun hat transmitter çıkışı için uygundur,frekans 500K d. 1 PULSE ve SIGNH girişi (yüksek hız pulse kanalı) Bu kanaldaki pulse uzun-hat receiver tarafından alınır.kontrolcünün kollektör çıkışı ve uzun hat transmitter çıkışı için uygundur,frekans 4000K Elektronik Dişli (1) Enkoder pulse sayıcısı Parametre Enkoder Çeşidi Encoder pulse sayıcısı(p/r) Çözünürlük oranı d. 0 Mutlak enkoder (17bit) PA002 d. 1 Gain enkoder (17bit) d. 2 Gain enkoder Ek:Basamak sayısı enkoderin çözünürlük oranını belirtir,enkoder sinyal çıkışının pulse sayısı ile aynı değildir.(faz A ve B).Enkoderin pulse sayısı ile 4 çarpılarak çözünürlük oranı bulunur. (2) Elektronik Dişli Elektronik dişli fonksiyonu,bir parçanın hareker miktarını komut kontrolcüsüyle istenilen değerde yapmadır. Komut kontrolcüsünden gelen 1 pulse komut,örnek olarak minumum birim "1 komut birimi" olarak adlandırılır. Electronic gear not used Electronic gear used Work piece Work piece Instruction unit: 1um Coder line count: 5000 Ball screw pitch: 6mm Coder line count: 5000 Ball screw pitch: 6mm Move the work piece by 10mm Bir tur 6mm ise ve 10 mm oynatmak için 10/6=1.67dönüş yapmak lazım.1 dönüş için 5000*4 pulse lazım,yani komut için 500*4*10/6=33333 pulse gerekir.bu hesaplam komut kontrolcüsünde yapılmalıdır. Move the work piece by 10mm by using the "instruction unit" 1 komut birimi 1 um'ye ayarlansın.iş parçasını 10 mm hareket ettirmek için 1 pulse 1um'ye denk olsun, Komut girişi 10000/1=10000 pulse'e ihtiyaç vardır. Elektronik dişli 1:1 Elektronik dişli 20:6 (2) İlgili Parametreler İlk dişli oranı(pay) PA205 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 1 ~ Hemen İlk dişli oranı (payda) PA206 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 1 ~ Hemen Motor şaftının mekanik redüksiyon oranı ve yük tarafı n/m'ye ayarlanırsa elektronik dişli oranı aşağıdaki formülle bulunabilir (Servo motor m kadar tur dönerken yük);
83 Elektronik dişli = B = PA205 = A PA206 Enkoder pulse sayısı 4 Yük şaftı 1 tur dönerken alınan yol m n * Ayarlanan değer aşılırsa,pay ve paydayı integer olacak şekilde ayar aralığına getiriniz. Not: Elektronik dişli oranını değiştirmeyiniz. Önemli Önerilen elektronik dişli oranı: 0.01 Elektronik Dişli Oranı(B/A) 100 (3) Elektronik Dişli Oranı Ayarları Lütfen elektronik dişli oranını aşağıdaki tabloya göre ayrlayınız. Prosedür İçerik Açıklama 1 Makine özelliklerini doğrulayınız. Redüksiyon oranını,bobin yarıçapı,vida mil adımı.. gibi özellikleri doğrulayınız. 2 Enkoder pulse sayısını doğrulayın. Enkoder pulse sayısını doğrulayın. Kontrolcünün 1 komut adımını belirleyiniz. 3 Komut birimini belirleyiniz. Lütfen,makine özelliklerine ve pozisyon hassasiyetine göre komut birimini belirleyiniz. 4 Yük şaftı 1 tur döndükten sonra alınan yolu hesaplayınız. Yük şaftı 1 tur döndükten sonra komut birimi miktarını komut birimine göre hesaplayınız. 5 Elketronik dişli oranını hesaplayın Formüle göre elektronik dişli oranını(b/a) hesaplayınız. 6 Kullanıcı parametresini ayarlayın Elektronik dişli oranını parametre olarak ayarlayınız (4) Elektronik dişli oranı hesaplama metodu Pozison kontrolünde,yükün gerçek hızı Komut pulse hızı x (B/A) x Makine redüksiyon oranı Kasnakla sürerken, elektronik dişli oranı(b/a) hesaplama yönetimi aşağıdaki gibidir. P pulse: Motor enkoder çözünürlük oranı.anlamı 1 dönüşteki motordan gelen feedback pulse sayısıdır.örnek olarak = 20000; M: Pulse hesaplama eşdeğeri (mm). Kontrolcünün çözünürlük oranı; L: Vida açma adımı (mm); i: Mekanik dişli oranı Sürülen tarafın kasnak dişlisi (makine tarafı) i = Süren tarafın kasnak dişlisi (motor tarafı) Örnek: Kntrolcünün komut eşdeğeri 0.001mm (1um); mekanik redüksiyon oranı I = sürülen çark / süren çark= 36 / 24; vida açma adımı 6mm; motor enkoderi 5000P/r, ve enkoder feedback pulse tur başına = Yukarıdaki formülle hesaplanırsa
84 8.4.3 Pozisyon Komutu Bu komut servo motorun pozisyonunu kontrol eder. Komut kontrolcüsünün pulse grubu çıkışı aşağıdaki gibidir. Bus sürücü çıkışı +24V açık kollektör çıkışı +12V açık kollektör çıkışı +5V açık kollektör çıkışı Açık kollektör çıkışı durumunda dikkat edilmesi gereken durumlar vardır. Açık kollektör çıkış sinyali sadece servo sürücünün CN2-7, 8, 11 ve 12 uçlarını alır, ave parametre düşük hız girişine ayarlanmalıdır.mesela PA200.3=0 (fabrika ayarı). Parametre Anlamı d.0 Düşük Hız pulse giriş kanalı seçimi PA200 d.1 Yüksek Hız pulse giriş kanalı seçimi Açık kollektör pulse girişinde,giriş sinyalinin parazit toleransı düşer.parazite bağlı sapma durumunda aşağıdaki parametrelerde değişiklil yapılabilir. (1) Giriş Çıkış Sinyal zamanı için örnek
85 Servo ON Excitation Motor not excited Symbol + Pulse train Coder pulse Not: 1. S-ON sinyalinin AKTİF'e ayarlanmasından komut sinyali arasındaki geçen süre 40ms üzerine kadar kontrol edilebilmelidir. Eğer komut pulse'i 40ms içinde giriş ise S-ON sinyali AKTİF olarak ayarlandığından,servo sürücü bazen komutları alamaz. 2. Lütfen S-ON sinyalini 20 μ s'den fazla siliniz. Table 8.1 Komut pulse girişi sinyal zamanlama Komut pulse sinyal Elektriksel Özellikleri formu Sembol + Pulse girişi (SİNYAL + PULS sinyali) Max. komut frekansı: Reverse 500kpps (açıkkollektör durumunda Forward instruction instruction : 200kpps) CW pulse + CCW pulse Max. komut frekansı: 500kpps (açık kollektör durumunda : 200kpps) Forwar d instruction Reverse instruction Not Sembol (SİNYAL) H = İleri Komut L = Ters Komut
86 Komut pulse sinyal formu Faz fark 2 pulse (Faz A + Faz B) Max. komut frekansı: x 4 katı: 200kpps (Açık kollektör durumunda: ps) Pahse A Pahse B Forward instruction Elektriksel Özellikleri Reverse instruction Not Phase B surpasses phase B by 90º Phase B lags behind phase A by 90º (2) Bağlantı Örnekleri (a) Bus sürücü çıkışı için bağlantı özellikleri Uygulanabilir lineer sürücü, örneğin T1 şirketinin AM26LS31 ürününe benzer Upper device Servo driver Linear driver Optocoupler Earthing of shielding layers on both ends
87 (b) Açık kollektör çıkışı bağlantı örnekleri Kollektör gücü 24V olduğunda,bağlantı aşağıdaki şekillere göre tamamlanabilir. Upper device Servo driver Optocoupler Earthing of shielding layers on both ends Kollektör gücü 12V veya 5V olduğunda,bağlantı aşağıdaki şekillere göre tamamlanabilir. Upper device Servo driver Optocoupler Earthing of shielding layers on both ends Lütfen limit direnci R1 değerini aşağıda verilen akımlar için seçiniz. Giriş akımı i = 7 ~ 15mA. Önemli Açık kollektör pulse girişinde,giriş sinyalinin parazit toleransı düşer.parazite bağlı sapma durumunda PA201.0 ve PA201.1 parametrelerini artırınız. Pozisyon komut azaltma artırma zamnı parametre 1 PA214 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 0 ~ ms 0 Hemen PA215 Pozisyon komut azaltma artırma zamnı parametre 2 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı
88 0 ~ 1000 rpm 0 Hemen Pozisyon komut yer değiştirme ortalama zamanı PA216 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki zamanı 0 ~ 500 rpm 0 Hemen Önemli Eğer pozisyon komut artırma/azalma zamanı parametresi (PA214,PA215) değiştirilirse,değişen değersadece komut girişi yoksa etki gösterir.değerin gerçekten etki etmesi için,lütfen giriş temizleme sinyali(clr) komut kontrolcüsünün pulse'ni engelleyin ya da sapma pulse'ni temizleyin. Aşağıdaki durumlarda motor hafifçe çalışabilir ve bunun yer değiştirme miktarına bir etkisi yoktur.(komut pulse sayıcısı) Komut kontrolcüsü artırmayan veya azalmayan komut gönderidiğinde Komut frekansı az olduğunda Elektronik dişli oranı normalden yüksek olduğunda (10 kereden fazla) Ek (PA214,PA215) parametreleri ile PA216 parametresi arasındaki fark şekilde gösterilmiştir. Artma,azalma zaman parametresi Ortalama Yer-Değiştirme Filtresi PA214 PA215 PA216 Before filtering Before filtering After filtering After filtering Responsive wave form of phase step instruction input Responsive wave form of phase step instruction input Before filtering After filtering Responsive wave form of trapezoidal instruction input Pozisyon tamamlama sinyali (COIN) Bu sinyalin anlamı servo motor görüntülemesinin pozisyon kontrolünde tamamlandığını söyler.lütfen komut kontrolcüsünün pozisyonlamasını tamamladığında kullanınız ve kilidi kontrol ediniz. Konnektör Pin Tip Sinyal İsmi Seviye Numarası Çıkış COIN CN2-29, 30 (fabrika ayarları) AKTİF=L seviyesi OFF=H seviyesi İsim Pozisyonlama tamamlandı Pozisyonlama tamamlanmadı Pozisyonlama tamamlama sinyali çıkış terminaline PA510 ile atanabilir.bölüm 3.4.3'ü referans alınız.fabrika ayarları CN2-29 ve 30 dur.
89 Pozisyonlama tamamlama genişliği PA525 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı 0 ~ pulse 10 Hemen Eğer komut kontrolcüsüün komut pulse giriş sayısı ile motorunyer değiştirme miktarı kullanılan parametreden az ise,coin(pozisyonlama tamamlama sinyali çıkışı elektronik dişli ayarının komut birimine bağlı olarak komut birimi olarak ayarlanır. Eğer ayarlanan değer çok fazlaysa,kayma yavaş-hız işleminde düşebilir,fakat COIN model normal zamanlarda çıkıştır,yani buna dikkat edilmelidir. Bu kullanıcı parametresi ayarı son pozisyonlama hassasiyetine etki etmez. Ek COIN sinyali pozisyon kontrolündeki sinyaldir Pozisyonlama Yakın Sinyali (NEAR) Bu sinyal (NEAR) pozisyonlamanın tamamlanmaya yakın olduğunu söyler. Genelde COIN sinyali ile bir çift olarak kullanılırlar. Bu sinyal pozisyonlama tamamlandığında Konnektör pin Tip Sinyal adı no Çıkış NEAR Atanması gerekli Seviye ON=L seviyesi OFF=H seviyesi Açıklama Pozisyonlama yakın sinyaline ulaşılmış Pozisyonlama yakın sinyaline ulaşılmamış Pozisyonlama yakın sinyali PA510 ile çıkış terminallerine atanabilir.lütfen bölümünü referans alınız. NEAR sinyal genişliği PA526 Ayar aralığı Ayar Birimi Fabrika Ayarı Etki Zamanı 0 ~ pulse 100 Hemen Eğer komut kontrolcüsünün komut pulse giriş sayısı ve servo motorun yer-değiştirme miktarı(sapma) farkı PA526 ile ayarlanan değerden düşükse NEAR sinyali çıkıştır. Ayar birimi komut birimidir,bu da elektronik dişli ayarının komut birimidir.genel olarak ayarlanan değer pozisyonlama tamamlama genişliği(pa525)ten büyük olmalıdır.giriş sinyali dağıtılmalıdır.lütfen bölümünü referans alınız Komut Pulse Engelleme Fonksiyonu (INHIBIT ) (1) Komut Pulse Engelleme Fonksiyonu (INHIBIT ) Bu fonksiyon komut pulse giriş sayıcısını engeller. Bu fonksiyon kullanıldığında,servo kilit(kenetlenmiş) duruma geçer.
90 Instruction pulse Deviation counter Feedback pulse (2) Giriş Sinyal Ayarı Tip Sinyal İsmi Konnektör Pin No CN2-46 (fabrika ayarı) Seviye ON=L seviyesi Giriş INHIBIT OFF=H seviyesi INHIBIT sinyal fonksiyonu sadece pozisyon kontrolünde aktiftir. 8.5 Hız Kontrol(Analog Voltaj Komutu) İşlemi Kullanıcı Parametre Ayarları İsim INHIBIT fonksiyonu AKTİF (komut pulse sayımı durur) INHIBIT fonksiyonu PASİF (komut pulse sayımı devam eder) Parametre Açıklama PA000 h. 1 Kontrol Mod Seçimi:Hız Kontrol(Analog Voltaj Komutu) Hız Komut Giriş Kazancı Ayar birimi Fabrika Ayarı Etki zamanı Ayar Birimi PA ~ 3000 (1.5 ~ 30.0V/ nominal 0.1V/nominal hız 600 Belirtilmemiş hız) Nominal dönüş hızında çalışan servo motor için hız komutunun analog voltaj değeri(v- REF)ayarlanmalıdır. Instruction speed (rpm) Set this gradient Instruction voltage (V) Örnek PA301=600 ün anlamı 6V giriş ayarlandığında,motor nominal hızda döner(fabrika ayarı) PA301=1000 in anlamı 10V giriş ayarlandığında,motor nominal hızda döner PA301=200 ün anlamı 2V giriş ayarlandığında,motor nominal hızda döner Giriş Sinyal Ayarı
. (PA000.")
91 (1) Hız Komut Girişi Eğer analog voltaj komutunun hız komut formu servo sürücüye göderilirse,servo motor giriş voltajına hız oranında hız kontrol işlemi gerçekleştirilir. Tip Sinyal İsmi Konnektör Pin No Açıklama V-REF CN2-5 Hız komut girişi Giriş AGND CN2-6 Hız komut girişi için yeni toprak bağlantısı Hız kontrolünde kullanılır. (analog voltaj komutu). (PA000.1 = 1, 5, 7, 9) PA301 hız komutunu giriş kazancını ayarlamak için kullanılır. Bu parametre ile ilgili detaylı bilgiyi bölümünde bulabilirsiniz. Giriş Özellikleri Giriş aralığı: DC±2V ~ ±10V / nominal hız Max.izin verilen giriş voltajı: DC ± 12V Rated rotating speed Factory setting Rated voltage (V) Rated rotating speed Gradient set by PA300. Giriş devresi Örnekleri Devreyi parazitlerden korumak için çokkanallı büklü kablolardan kullanınız. Çeşitli direnç örnekleri P25HP-10B tip ürün Servo sürücü Ayar Örnekleri PA301 = 600 de nominal dönme hızı: ± 6V örnekleri aşağıda bulabilirsiniz. Hız Komut Girişi Dönme Yönü Dönme Hızı Nominal dönme hızı = 3000rpm tip motor Nominal +6V Forward dönme 3000rpm hızı 1/6 +1V Forward nominal dönme 500rpm hızı 1/2-3V Reverse nominal dönme -1500rpm hızı Voltaj giriş aralığı PA301 ile değiştirilebilir. Programlanabilir kontrolcü ve benzerleri komut kontrolcüsünün hız komut terminali bağlantısyla pozisyon kontrolünde kullanılır.
92 Instruction controller Servo unit Speed instructio n Input terminal Feedback pulse Input terminal (2) Komut Sinyalinde Proportional İşlemi (P-CON) Çok kanallı bükülü kablo Tip Giriş Sinyal İsmi P-CON Konnektör Pin No Terminal dağıtımı gereklidir Seviye ON=L seviyesi OFF=H seviyesi İsim Servo sürücü P kontrolünde çalışır Servo sürücü PI kontrolünde çalışır. P-CON sinyali PI(proportionˊintegral) veya P (proportion) kontrolünün hangisi olduğunu seçer. Eğer P ye ayarlanırsa,motor dönüş rahatlar ama değerin çok olması motorda titremeye neden olur. Giriş komutu:kademeli olarak servo motorun dönüşünü yavaşlatır,fakat servo sertliği duruşta azalır. P-CON sinyali giriş konnektör pinlerine atanmalıdır.bölüm e bakınız Instruction offset adjustment Hız kontrolündeyken,analog komut voltajı bile 0V yolladığında,motor hafifçe dönebilir.bu durum,kontrolcünün komut voltajı veya dahili devrede Mv seviyesinde sapma(offset) vardır.bu durumda komut offseti otomatik veya elle panel üzerinden ayarlanabilir.lütfen bölüm 7.2 yi referans alınız. Analog(hız torku) komut offsetinin otomatik ayarlanması offset ölçme ve otomatik voltaj ayarlamanın bir fonksiyonudur.kontrolcünün ve harici devrenin komut voltajı saptığında,servo sürücü aşağıdaki gibi otomatik olarak kendini düzenler.
93 Instruction voltage Instruction voltage Offset adjustment scope: Offset Speed instructio n Automatic offset correction Speed instructio n Automatic offset adjustment inside servo unit Komut ofsseti atomotik olarak bir kere ayarlandığında,offset servo sürücünün içinde depolanır.offset hız komut offseti AF007 ile kontrol edilebilir.lütfen bölüm 8.5.2'yi referans alınız. (1) Hız komut offsetinin otomatik olarak ayarlanması Sapma pulse'i servo kilitlendiğinde ve durduğunda komut kontrocüsünü pozisyon dönme ayarı şartı altında sıfıra ayarlanır,fakat otomatik ayarlamayla (AF006) kullanmayınız.bu durumda litfen manuel(af007) ile kullanınız. Sıfır hız komutunda,sıfır-kenetleme hız kontrolü servo kilitlemeyi çalıştırmak için vardır.lütfen bölümünü inceleyiniz. Important Önemli:Lütfen analog sıfır offsetin otomatik ayarını servo PASİF olduğunda çalıştırın. (2) Hız komut offsetinin manuel olarak ayarlanması Lütfen hız komut offsetinin manuel olarak ayarlanmasını(af007) aşağıdaki durumlarda yapınız. Komut kontrolcüsü pozisyon modunda ayarlandığında sapma pulsenin servo kilitlendiğinde ve durduğunda sıfır yapmak için Offseti istenilen değere atamak için Otomatik ayarla ayarlanmış offset değerini kontrol etmek için Basit olarak AF006 ile aynı fonksiyondur,fakat bu durumda offset girişi direk olarak elle yapılır.
94 Ayarlama şekli ve offsetin ayar birimi aşağıdaki gibidir. Offset adjustmen t Speed instruction Offset adjustment scope: ±2046 (Speed instruction: ± 750 mv) Offset setting unit Analog input voltage Offset setting unit (Speed instruction: 1=0.05 mv Lütfen,hız komut offsetini aşağıdaki adımlara göre otomatik olarak ayarlayınız Soft start Soft startın anlamı faz step hız komut girişi kesin hızlanma ve yavaşlama komutunun servo sürücünün içine dönüştürülmüş halidir. Soft start hızlanma zamanı PA303 Ayar aralığı Ayar Birimi Fabrika Ayarı Etki Zamanı 0~5000 1ms 0 Hemen Soft start yavaşlama zamanı PA304 Ayar aralığı Ayar Birimi Fabrika Ayarı Etki Zamanı 0~5000 1ms 0 Hemen Ayar değerleri aşağıdaki gibidir. PA303: Durduktan sonra 1000rpm'e kadar olan zaman,ör. 1000rpm'e hızlanırken geçen zaman PA304 Durduktan sonra 1000rpm'e kadar olan zaman, ör. 1000rpm'den yavaşlarken geçen zaman Max. motor dönüş hızı After soft start Hız komut Filtresi Hız Komut Filtresi zaman parametresi PA302 Ayar Birimi Fabrika ayarı Etki zamanı Ayar Birimi 0~ ms 40 Hemen Analog hız komutu V-REF hız komutunun hafifletmek için 1 zaman rölesi filtresi girişidir.eğer ayar değeri çok yüksekse cevaplanabilirlik düşürülür Sıfır Clamp Fonksiyonun Kullanımı
95 (1) Sıfır Clamp Fonksiyonun Anlamı Bu fonksiyon hız modunda kullanılır. Eğer sıfır-clamp pozisyonu (ZEROSPD) (PA300.3=0) sinyali AKTİF olarak ayarlanırsa, veya hız komutunun giriş voltajı (V-REF) (PA300.3 = 1),PA316 (sıfır clamp kademesi) dönüş hızını aşarsa, servo sürücü pozisyonlamaya ayarlanır ve hız komutu yok sayılır ve servo motor servo kilit durumunda acil duruş yapar.servo motor sıfır-clampin etkin olduğu pozisyona ±1 pulse te kenetlenir ve sıfır-clamp pozisyonuna harici bir güç olsa bile döner. (2) Kullanıcı Parametre Ayarı Parametre Açıklama Hız Kontrol Switch 0 PA300.3 = 0, Harici IO ile kontrol (ZEROSPD sinyali) PA300 PA300.3 = 1, Otomatik (PA316'ya göre hız ölü bölgesinde davranma) Sıfır-clamp kanal değiştirme şartlarında davranışı PA000 = h. 1, PA300.3 = 0, ZEROSPD AKTİF (L seviyesi), sıfır-clamp aksiyonuna girer PA000 = h. 1, PA300.3 = 1, hız komut(v-ref) PA316'dan küçük olursa, sıfır-clamp aksiyonuna girer. Servo driver "V-REF" speed instruction Speed Speed instruction Zero clamping level set value Time Zero clamping "ZEROSPD Input Zero clamping action On Off Sıfır Clamp Seviyesi PA316 Ayar Birimi Fabrika ayarı Etki zamanı Ayar Birimi 1~2000 1rpm 30 Hemen Hız kontrolünde ZEROSPD motoru sıfır-clamp pozisyonuna getirebilir.pa316 servo motorun maximum dönme hızından fazla olsa bile motor maximum hıza göre dönecektir. (3) Giriş Sinyal Ayarı Tip Giriş Sinyal İsmi ZEROSPD Konnektör pin no Atanması gerek Ayar ON=L seviyesi OFF=H seviyesi Bu giriş sinyali sıfır-clamp aksiyonu kanal değiştirmek içindir. ZEROSPD sinyali kullanıldığında,giriş sinyali atanmalıdır. Bu atama için bölüm 3.4.3'ü referans alınız. Önemli ZEROSPD sinyali dağıtıldığında,sıfır-clamp aksiyonu PA000=h olsa bile etkin olur. 1 (hız kontrol). Açıklama Sıfır-clamp fonksiyonu AKTİF Sıfır-clamp fonksiyonu PASİF
96 8.5.7 Enkoder Sinyal Çıkışı Enkoderin geri besleme pulse'i çıkış atamaları aşağıdadır. Tip Sinyal İsmi Konnektör İsim PAO CN2-33 Enkoder çıkış fazı A Çıkış /PAO CN2-34 Enkoder çıkış /fazı A PAO CN2-35 Enkoder çıkış /fazı B Çıkış /PAO CN2-36 Enkoder çıkış /fazı B PZO CN2-19 Enkoder çıkış fazı Z(orijinal nokta pulse) Çıkış CN2-20 Enkoder çıkış fazı Z (orijinal nokta pulse) Description of that output Servo unit Instructio n controller Encoder Encoder data Frequ e ncy divisio n circuit Phase A (PAO) Phase B (PBO) Phase Z (PZO Çıkış Faz Formu Forward (Phase B ahead by 90º) Reverse (Phase A ahead by 90º) Phase A Phase A Phase B Phase B Phase Z Phase Z Mekanik orijin reset aksiyonu için servo sürücünün Z pulse ni kullanmadan önce servo sürücünün 2 dönüşle döndürünüz. Mekanik sistemin yapısına göre eğer yukarıdaki durum yapılmazsa,lütfen orjinal nokta reset olayını 600 rpm in altında çalıştırınız. Frekans Bölmesi Bunun anlamı değerin pulse yoğunluğuna kullanıcı parametresiyle çevrilmesidir. Enkoder pulse frekans bölme oranı ayarı
97 PG frekans bölme oranı PA210 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı 16~ P/rew Hemen Servo sürücüden dışarı yollanan PG çıkış sinyalinin (PAO, /PAO, PBO, /PBO) çıkış pulse sayısı ayarlanır. Her bir dönüşteki geri-besleme sinyali ile PA210 ile frekans bölmesi ayarlanabilir.(lütfen ayarları makine özellikleri ve komut kontrollerine göre ayarlamalarını yapınız.) Ek olarak,ayar kapsamı servo motorun enkoder pulse sayısına göre çeşitlilik gösterir. Enkoder Tipi Enkoder Pulse Sayısı(P/R) Çözünürlük Ayar Aralığı Line-driver enkoder pulse / dönüş oranı 5000P/R 16 ~ 5000 Mutlak enkoder 17 basamak, pulse/dönüş 32768P/R 16 ~ Önemli PA210 değeri enkoder line sayısından fazla ayarlanabilir,frekans bölme değeri enkoder line sayısıdır. Çıkış Örnekleri PA210 = 16 (tur başına 16 pulse) Ayar değeri: 16 1 turn Aynı Hız Test ve Çıkış Motorun dönme hızı komutla aynı olduğunda,aynı hız test ve çıkış(vcmp) sinyali çıkıştır,lütfen komut kontrolcüsüyle kenetlendiğinde kullanınız. Tip Sinyal İsmi Konnektör Pin No Ayar Açıklama Çıkış VCMP Atanması gerekli ON=L seviyesi Aynı Hız durumu OFF=H seviyesi Farklı Hız Durumu This output signal needs to be assigned through parameter PA510. As regards distribution of output signal, please refer to Input/output signal distribution. Aynı-hız test genişliği PA517 Ayar Aralığı Ayar Birimi Fabrika Ayarı Etki Zamanı 0 ~ 100 rpm 10 Hemen Eğer motor dönüş hızı ve komut hızı arasındaki fark PA517 den küçük olursa VCMP sinyali çıkış olur. VCMP is output Example within this scope
98 PA517 = 100 ve komut hızı 2000rpm olduğunda, eğer motor dönme hızı 1900 ~2100rpm arasında olursa, "VCMP" ON olarak ayarlanır. Ek "VCMP" hız kontrolünde çıkış sinyalidir. 8.6 Tork Kontrol İşlemi Kullanıcı Parametre Ayarı Tork Kontrol işlemi analog voltaj komutu kullanılarak yapılır,aşağıdaki parametreler ayarlanmalıdır. Kullanıcı Parametresi Açıklama Kontrol Mod Seçimi:Tork Kontrol(analog komut) PA000 h. 2 Torque instruction input gain PA400 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı 10 ~ V/ nominal tork 30 Hemen Servo motorun nominal şartlarda çalışması için gerekli olan tork komutunun ayarlanması (T-REF) analog voltaj seviyesi Torque instructio n Set this gradient Instruction voltage (V) Örnek PA400=30 3V giriş ayarlandığında motorun nominal torku PA400= V giriş ayarlandığında motorun nominal torku PA400=200 2V giriş ayarlandığında motorun nominal torku Tork Komut Girişi Tork komut girişi sinyalleri aşağıda verilmiştir. Tip Sinyal İsmi Konnektör Pin Numarası Açıklama Tork Komut Girişi T-REF CN2-9 Giriş AGND CN2-10 Tork kontrol(analog voltaj komutu) (PA000.1 = 2, 6, 8, 9) ile kullanılır.pa400 tork komut giriş kazancı için kullanılır. Giriş Özellikleri Giriş aralığı DC 1V ~ 10V / nominal tork Maximum izin verilen giriş kazancı DC12V Fabrika ayarlarında PA400 = 30, nominal tork 3V tan az Nominal tork 3V girişte verilir. 9V girişte %300 nominal tork -0.3V girişte %10 nominal tork Voltaj giriş aralığı PA400 parametresi ile değiştirilebilir.

99 Torque instruction (%) Factory setting Input voltage (V) Giriş Devresi Örneği Girişteki parazitleri engellemek için çok-kanallı bükülü kablolardan kullanınız. Ayarlı direnç Örneği:P25HP-10B ürünü Dahili Tork Komutu 1. Dahili tork komutunu operator panel yardımıyla doğrulayınız. Dahili tork komutu DP010 ile doğrulanabilir.lütfen bölüm yi referans alınız Offset ayarlama (1) Tork Komut Offsetinin otomatik ayarlanması Tork kontrol modu kullanıldığında 0V komut yollansa bile,motor hafifçe dönebilir.bu durum kontrolcü veya harici devresinin kayma offsetinden dolayıdır.(mv) Bu durumda,komut offseti panel kullanılarak otomatik veya elle değiştirilebilir. Otomatik ayar parametresi AF006 dır.bu parametre offseti ölçüp kendisi otomatik olarak ayar yapar. Kontrolcüde veya harici devrede herhangi bir kayma meydana gelirse servo sürücü aşağıdaki gibi otomatik ayar yapar.
100 Instruction voltage Offset Instruction voltage Offset adjustment scope: ±2047 Torque instructio n Automatically offset correctio n Torque instructio n Automatic offset adjustment inside servo unit Uygulanan komut offsetinin otomatik ayarı servo sürücü içinde saklanır. Tork komut offseti AF008 manuel ayarlama parametresiyle doğrulanabilir. Komut kontrolcüsü pozisyonlama moduna ayarlandığında AF006 kullanılamaz.lütfen manuel ayarlama modu olan AF008 i kullanınız. Lütfen tork komutunun manuel olarak ayarlanması işlemini aşağıdaki yönergelere göre yapınız. (2) Tork Komut Offsetinin Manuel Olarak Ayarlanması Lütfen AF008 parametresiyle tork komutunun manuel olarak ayarlanmasını aşağıdaki durumlarda yapınız. Komut kontrolcüsü pozisyonlama moduna ayarlandığında servo durudğunda veya kilitlendiğinde kayma offsetini ayarlamak için Offseti belli bir değere atamak için Otomatik ayarlanan offset verisini kontrol etmek için Bu fonksiyonun temeli AF006 ya dayanmakatadır ama AF008 de direk olarak herhangi bir offset değeri girilebilir. Aşağıdaki şekilde offset ayarlama ve ayar birimi belirtilmiştir.
101 Offset adjustment scope Torque instruction Offset adjustment scope: ±2046 Torque instruction: ±750mV Offset setting unit Analog input voltage Offset setting unit Tork Kontrolde Hız Limiti Servo motorda çıkış torkuyla tork kontrolü yapılmak gerektiğinde motorun dönme hızı kontrol edilemez. Eğer tork mekanik taraftaki yük torkuna göre çok büyük ayarlanırsa, motor dönme hızının fazla yükselmesiyle mekanik tork aşılabilir. Mekanik taraftaki ölçümleri korumak adına,servo motorun tork kontrolünde dönüş hızını kontrol etmek için limit koyulmuştur. No speed limit With speed limi t Damage may be caused if Motor Motor the speed limit of speed speed mechanical movement is (rpm) The speed limit of (rpm) mechanical movement will Max. speed not be exceeded! Limit speed (1) Hız Limit Mod Seçimi(tork limit seçeneği) Kullanıcı Parametresi Açıklama d. 0 PA407 değeriyle hiz limitini ayarlama(dahili hiz limit fonksiyonu) PA002 d. 1 V-REF i(cn2-5, 6) harici hız limit girişi olarak kullanarak V-REF giriş voltajıyla hız limitini ayarlayınız ve pa301 i ayarlayınız.(harici hız limit fonksiyonu) (2) Dahili Hız limit Fonksiyonu Tork Kontrolde hız limiti PA407 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı 0 ~ 5000 rpm 1500 Hemen Tork limit ayarlandığında motorun dönme hız limitini ayarlar. PA002.1 = 0 olduğunda bu parametre etki gösterir. PA407 ile ayarlanan değer servo motorun dönme hızını aşsa bile,gerçek değer motorun maximum
102 dönme değeri olarak ayarlanır. (3) Harici Hız Limit Fonksiyonu Tip Sinyal İsmi Konnektör Pin No Açıklama V-REF CN2-5 Harici Hız limit Girişi Giriş AGND CN2-6 Harici Hız limit Girişi Motor hız limiti PA002.1 = 1 olduğunda,tork limiti analog voltaj komutu kullanıldığında giriştir,v-ref in hız limit girişiveya PA407 tork kontrolünün hiz limiti etkin olur. Limit girişi voltaj seviyesi için PA301 değerinin belirlenmesi polarite ile alakası yoktur. Tork Limitinde Hız Kontrol PA301 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı 150 ~ V/ nominal hız 600 Hemen Tork kontrolünü harici jız limitne ayarlamak için dönme hızının voltaj seviyesi belirlenir. PA301 = 600 olduğunda (fabrika ayarları), eğer V REF (CN2-5, 6) 6V voltsa, gerçek dönme hızı servo motorun nominal dönme hızı ile limitlenir. (4) Motor Dönme Hızı limitteyken Çıkış Sinyali Tip Sinyal İsmi Konnektör Pin No Seviye Açıklama CN2 - (Atanması gerekli) Motorun dönme hızı limit VLT + ON=L seviyesi Giriş durumunda CN2 - (Atanması gerekli) OFF=H Motorun dönme hızı limit VLT - seviyesi durumunda değil Tork limit durumunda,motorun dönme hızı PA407 ye ulaşırsa veya hız limitine girerse VLT sinyali çıkış olur. VLT sinyalini kullanmak için,pa510 parametresiyle terminal dağıtımı yapılır.lütfen bölüm bölümünü referans alınız. 8.7 Hız Kontrol (dahili hız seçimi ayarı) İşlemi Dahili Hız Seçimi Ayarı Anlamı Bu ayarın anlamı,servo sürücünün içine kullanıcı parametresiyle 8 dönme hızı ayarlanır ve harici giriş sinyaliyle bunlar seçilebilir. Bu 8 hız seçimi hız kontrolde aktif olan bir fonksiyondur. Hız jeneratörü ve pulse jeneratörünü ayarlamak gereksizdir. Dahili hız s INSPD2, INSPD1 ve INSPD0 kombinasyonları için seçilebilir. INSPD2 yüksek pozisyon INSPD0 ise düşük pozisyondur.eğer INSPD2 etkinse(inspd0 ve INSPD1 pasif), INSPD4 dahili hızı seçilir.
103 Servo driver Internal speed register Speed instruction Kullanıcı Parametre Ayarı Kullanıcı Parametresi PA000 h. 3 Açıklama Kontrol Mod Seçimi: Dahili Hız Kontrol Ayarı (junction komut) Dahili Hız Ayarı (SPEED0) PA307 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 100 Hemen Dahili Hız Ayarı (SPEED1) PA308 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 200 Hemen Dahili Hız Ayarı (SPEED2) PA309 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 300 Hemen Dahili Hız Ayarı (SPEED3) PA310 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 400 Hemen Dahili Hız Ayarı (SPEED4) PA311 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 500 Hemen Dahili Hız Ayarı (SPEED5) PA312 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 600 Hemen Dahili Hız Ayarı (SPEED6) PA313 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 700 Hemen Dahili Hız Ayarı (SPEED7) PA314 Ayar Aralığı Ayar Birimi Fabrika Ayarları Etki Zamanı ~ 5000 rpm 800 Hemen Önemli Eğer PA307 ~ PA314 parametrelerindeki değer motorun maximum dönme hızını aşıyorsa, uygulanacak değer motorun maximum hızıyla sınırlıdır Giriş Sinyal Ayarı İşlem hizi aşağidaki giriş sinyalleriyle değiştirilebilir.
104 Type Signal name Connector pin number Name Giriş Hız Seçim Sinyali 0 INSPD0 CN2 - (Atanması gerekli) Giriş INSPD1 CN2 - (Atanması gerekli) INSPD2 CN2 - (Atanması gerekli) Giriş Hız Seçim Sinyali 1 Giriş Hız Seçim Sinyali 2 3 sinyalin(inspd0, INSPD1 ve INSPD2) kombinayonundan 8 hız ortaya çıkar. Eğer işlem INSPD0, INSPD1 ve INSPD2 ile gerçekleştirliyorsa, giriş sinyali PA500 ~ PA507 parametreleriyle atanmalıdır.lütfen bölüm ü kontrol ediniz. 8.8 Kontrol Mod Kombinasyonu Seçimi Servo birimlerinde 2 çeşit kontrol modu vardır.bu controller biribiriyle combine olabilir ve birinden birine değiştirilebilir.kontrol modu Pn000.1 parametresiyle ayarlanır. Aşağıda bu modları bulabilirsiniz Kullanıcı Parametre Ayarı Kullanıcı Parametresi PA000 h. 4 h. 5 h. 6 h. 7 h. 8 h. 9 Kontrol mod kombinasyonu Dahili hız kontrolü (junction komutu) Pozisyon kontrol (sinyal komutu) Dahili hız kontrolü (junction komutu) Hız kontrol (analog komutu) Dahili hız kontrolü (junction komutu) Tork kontrol (analog komutu) Pozisyon kontrol (pulse komutu) Hız kontrol (analog komutu) Pozisyon kontrol (pulse komutu) Tork kontrol (analog komutu) Tork kontrol (analog komutu) Hız kontrol (analog komutu) Önemli Kontrol mod değişimleri harici sinyal girişleriyle yapılmalıdır.giriş sinyal değişimi PA arasındaki parametrelerle yapılmalıdır Kontrol Mod Değiştirme Komutu Giriş sinyal seçimi kontrol moduyla yapılırken(c-mode), PA ~9 arasında combine edilirken 1 veya 2 nin ikisi de seçilebilir. C-MODE sinyali etkin değilken,kontrol mod1 seçilir;c-mode sinyali etkinken kontrol mod 2 seçilir.seçimden önce ve sonra 10 ms giriş komutu vermeyiniz.c-mode seçimi aşağıdaki şekilde anlatılmıştır.
105 C-MODE signal Ineffective Effective Ineffective Control mode 1 Control mode 2 Control mode 2 No instruction input above 10ms
106 Bölüm 10 Hata Tanılama 10.1 Alarm Listesi Alarm No. E.03 Parametre Hatası Alarm ismi Alarm içeriği Anormal parametre ve doğrulama Silinebilir Hayır E.04 Anormal Parametre formatı Servo sürücünün dahili parametresinde anormal veri Hayır E.05 Akım test kanalı 1 anormal formatı Anormal dahili devre Hayır E.06 Akım test kanalı 2 anormal Anormal dahili devre Hayır E.08 Dahili iletişim hatası Servo sürücünün yanlış dahili iletişimi Hayır E.10 Enkoder kablosu bağlantı hatası Enkoder sinyal kablosunda bağlantı hatası var Hayır E.11 Enkoder AB pulse i yok Enkoder AB pulse i normal değil Hayır E.12 Enkoder Z pulse i yok Enkoder Z pulsesi kayıp Hayır E.13 Enkoder UVW hatası Enkoder UVW hatası Hayır E.14 Enkoder durum hatası Yanlış enkoder seçimi Hayır E.15 Ana devre güç kablosu hatası E.16 Rejenerasyon hatası Ana devre gücünün bir fazı bağlanmamış Anormal rejeneratif süreç döngüsü Hayır Hayır E.17 Rejeneratif direnç hatası Rejeneratif direnç hatası Hayır E.18 Düşük voltaj Ana döngünün DC voltaj seviyesi yetersiz Hayır E.19 Yüksek voltaj Ana döngünün DC voltaj seviyesi anormal yüksek Hayır E.20 Güç modül alarmı Çok yüksek akımdan dolayı güç modülünde anormallik Hayır E.21 Aşırı yükleme(overload) Yüksek orandaki tork nedeniyle devam eden operasyon durdu Evet E.22 Rejenerasyon aşırı yükleme Rejeneratif direncin aşırı yüklenmesi Evet E.23 DF(dinamik fren) aşırı yükleme Dönen enerji DF direncinin kapatisesini aştı Evet E.25 Dahili pozisyon hatası(overflow) E.26 Pozisyon takip hatası E.27 Hız aşımı E.28 Motor arızası E.29 Motorun kontrolden çıkması Dahili pozisyon değerini aştı Pozisyon takip hatası PA528 değerini aştı Motorun hızı maximum dönme hızının 1.2 katına çıkarsa Motor hızının verilen hızla uzun süre eşleşmemesi Motor anormal çalışır,büyük bir ihtimalle motorun güç kablosunda veya encoder kablosunda veya motor ve sürücü arasındaki bağlantıda sorun vardır. Evet Evet Evet Evet Evet
107 Alarm Silinebilir Alarm ismi Alarm içeriği No. E.30 Elektronik dişli koruması Dişli oranı çok yüksek ayarlanmış Evet E.31 Dahili veri hesaplama koruması Dahili veri yüksek, hesaplama 32 biti aştı. Evet E.35 Sürücü giriş korumasını engelledi Limitli bitlerle sinyal girişi Evet E.44 Sürücü reset hatası Sürücü çok hızlı beslendi veya sürücü anormal çalıştı Evet E.45 Dahili Hata 1 Sürücü 1 in dahili hatası Evet E.46 Dahili Hata 2 Sürücü 2 nin dahili hatası Evet E.47 Dahili Hata 3 Sürücü 3 ün dahili hatası Evet E.50 17bit seri enkoderle anormal Servo sürücü enkoderla iletişim haberleşme kuramıyor Evet E.51 17bit seri enkoder kontrol alanı doğrulama hatası Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Evet E.52 E.53 E.54 17bit seri enkoder haberleşme verisinde doğrulama hatası 17 bit seri enkoder durum alanında Cut-off pozisyon hatası 17 bit seri enkoderde SFOME cut-off pozisyon hatası E.55 17bit seri enkoder hız aşımı E.56 17bit serial enkoderde yanlış absolut durumu E.57 17bit seri enkoder yanlış sayımı Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Güç aççıkken enkoder yüksek hızda döndü veya mutlak enkoder batarayaya bağlanmamış Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Evet Evet Evet Evet Evet Evet 17bit seri enkoderın multi-turn E.58 Çok turlu enkoder bilgi taşması Evet bilgisinde taşma E.59 17bit seri enkoder aşırı ısınma Absolute encoder aşırı ısındı Evet 17 bit seri encoderda Multi-turn E.60 Çok turlu enkoder bilgi hatası Evet bilgi hatası Çok düşük batarya voltajı E.61 17bit serial enkoder batarya alarmı Evet (3.1V den az) Battery voltajı 2.5V un altında E.62 17bit serial enkoder batarya alarmı multi-turn pozisyon bilgisi Evet neredeyse kaybolacak 17bit serial enkoder veri 17 bit seri enkoderin saklama E.63 Evet işleyemedi hafızasında veri hatası 17 bit seri enkoderın saklama 17bit seri enkoderde veri ve rakam E.64 hafızasında anormal veri ve Evet doğrulama rakam doğrulama Sürücü ve motor uyuşmazlığı Sürücü motorla E.67 Evet eşleşemedi.(pa012) Sürücü bu tip motorla E.68 Motor model hatası Evet çalıştırılmamalı E.69 Servo sürücü model hatası Motor bu servoyla eşleşmedi Evet
108 Alarm No. E.70 Alarm ismi CAN ileişiminde elektronik dişli hatası E.71 CAN iletişim hatası Alarm içeriği CAN iletişiminde çok yüksek elektronik dişli oranı CAN hattı koptu veya CAN iletişim istemci tarafı hatası Silinebilir Evet Evet 10.2 Hata sebepleri Alarm No. E.03 Parametre hatası E.04 E.05 E.06 E.08 E.10 E.11 Alarm ismi Hata nedeni Çözüm önerileri Parametre formatı anormal Akım test 1. kanal anormal Akım test 2. kanal anormal Dahili haberleşme hatası Enkoder kablosu bağlı değil Enkoder AB pulsesi kayıp E.12 Enkoder Z pulsesi kayıp E.13 Enkoder UVW hatası E.14 Enkoder durum hatası E.15 Ana devre güç bağlantısı hatası E.16 Rejenerasyon hatası E.17 Rejeneratif direnç hatası Anormal parametre ve doğrulama servo sürücünün dahili parametresinde anormal veri formatı Anormal dahili devre Anormal dahili devre Servo sürücünün yanlış dahili iletişimi Enkoderın sinyal kablosu bağlı değil Enkoder AB pulsesi kayıp Enkoder Z pulsesi kayıp 1. Fabrika ayarları için resetleyin. (AF005) 1. Fabrika ayarları için resetleyin. (AF005) 1. Gücü kapatınız,1 dakika sonra gücü tekrar veriniz. 1. Gücü kapatınız,1 dakika sonra gücü tekrar veriniz. 1. Gücü kapatınız,1 dakika sonra gücü tekrar veriniz. 1. Enkoderın kablolarını kontrol edin; 2. PA002.3 motorun enkoderiyle eşleştiğini kontrol edin 1. Enkoderın kablolarını kontrol edin; 2. Sürücü ve motorun topraklama kablosunu kontrol edin ve ekranlama kablosunun doğru bağlandığını kontrol edin 3. Enkoder kablosunun akım kablosundan ayrıldığına emin olunuz. 1. Enkoder bağlantısını kontrol ediniz. 1.Motorun üstündeki enkoderın linedriver Enkoder UVW hatası enkoder olduğuna emin olunuz Motorun Check coder's üstündeki wiring enkoderın Line-driver enkoder line-driver enkoder olduğuna emin yanlış başlangıç durumu olunuz Enkoderın bağlantısını kontrol ediniz. 1. Giriş gücünün her fazına bakınız Ana devre gücünün 3 2. Giriş gücünün voltajının fazından bir tanesi seviyesine bakınız. bağlanmamış Anormal rejeneratif işleme döngüsü Rejeneratif direnç hatası 1. Rejeneratif işleme döngüsü anormal; 2. L1, L2 ve L3 giriş gücünde çok düşük voltaj 1-Sürücü terminalleri "P, D, C" nin güvenilir bağlandığına bakınız. 2-Rejeneratif direncin hasar görüp görmediğine bakınız. 3-L1, L2 ve L3 voltajının çok düşük olup olmadığına bakınız.
109 E.18 Düşük voltaj E.19 Aşırı voltaj E.20 Güç modül alarmı E.21 Aşırı yükleme Ana döngünün DC voltajı yetersiz Ana döngünün voltaj çok yüksek Güç modül alarmı Motor belirlenen tork değerinin üzerinde sürekli çaslıştı. 4. Fren direnci kullanılmıyorsa PA009.0 = 1 olarak set ediniz. Giriş güç voltajını kontrol ediniz. 1. Giriş voltajını kontrol ediniz.t; 2. Rejeneratif direncin zarar görmediğine emin olunuz. 1. Sürücünün motorla eşleştiğini (PA012) kontrol ediniz. 2. Sürünün aşırı yükleme çarpanlarını(pa402,pa403) düşürünüz 3. Tork filtreleme zamanını artırınız.(pa104); 1. Aşırı yükleme eğrisini artırınız.(pa010.3), Motor sıcaklığı gereksinimlere kadar ulaşsın. 2. Servo sistemin hızlanma yavaşlama zamanı (pozisyon kontrol durumunda: PA100 ü düşür ve PA214 ve PA215 artır); 3. PA402 ve PA403 ü azaltınız.; 4. Daha yüksek güçlü bir servo motor kullanınız. E.22 Rejenerasyon aşırı yükleme Rejeneratif direncinin aşırı-yükleme koruması 1. Servo sistemin hızlanma yavaşlama zamanı (pozisyon kontrol durumunda: PA100 ü düşür ve PA214 ve PA215 artır); 2. Rejeneratif direnç dayanımını sağlayacak PA010.2 parametresini artırınız. E.23 E.25 E.26 DF(dinamik fren) aşırı yükleme Limit aşımı (overflow) Pozisyon tolere dışı Dönen enerji DF direncinin kapatisesini aştı Dahili pozisyon hatası taştı ve pozisyon sapması nı aştı Pozisyon taşma pulse i PA528 parametresini aştı 1. JOG modunda motorun düzgün çalışığtını kontrol ediniz. 2. Elektronik dişli oranının doğru olduğunu 3. Servonun tork ayarının doğruluğuna bakınız. 4. Limit olup olmadığına bakınız. 1.JOG modunda motorun düzgün çalışığtını kontrol ediniz. 2.Elektronik dişli oranının doğru olduğunu 3.Limit olup olmadığına bakınız. 4.PA528 i artırınız. E.27 Hız-aşımı Motorun hızı maximum dönme hızının 1.2 katına çıkarsa 1. Motorun U, V ve W kablolarının doğruluğuna bakınız. 2. Servo parametrelerini kontrol ediniz.eğer yük ataleti yüksek ve sistem kazanç parametresi düşükse,daha fazla taşma görülür ve bu alarma neden olabilir.
110 E.28 Motor arızası E.29 E.35 Motorun kontrolden çıkması Motor hızının verilen hızla uzun süre eşleşmemesi Motor anormal çalışır,büyük bir ihtimalle motorun güç kablosunda veya encoder kablosunda veya motor ve sürücü arasındaki bağlantıda sorun vardır. Sürücü giriş Limitli bitlerle sinyal girişi korumasını engelledi E.44 Sürücü reset hatası Sürücü çok hızlı beslendi veya sürücü anormal çalıştı E.45 Dahili Hata 1 Sürücü Dahili Hata 1 E.46 Dahili Hata 2 Sürücü Dahili Hata 2 E.47 Dahili Hata 3 Sürücü Dahili Hata 3 E.50 E.51 E.52 E.53 E.54 E.55 17bit seri enkoderle anormal haberleşme 17bit seri enkoder kontrol alanı doğrulama hatası 17bit seri enkoder haberleşme verisinde doğrulama hatası 17 bit seri enkoder durum alanında Cutoff pozisyon hatası 17 bit seri enkoderde SFOME-cut-off pozisyon hatası Servo sürücü enkoderla iletişim kuramıyor Yanlış odd-even pozisyonu veya cutoff pozisyonu; enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder sinyalinde parazit var veya enkoderın dekoderi bozuk Enkoder güç açıkken 17bit seri enkoder hız yüksek hızda dönüyor aşımı veya mutlak enkoder bataryaya bağlı değil 1. Motorun U, V ve W kablolarını kontrol ediniz. 2. Servo parametrelerinin çok fazla değişip değişmediğine bakınız. 1. Motorun U, V and W kablolarını 3. Increase PA530 set value; kontrol ediniz. 2. Enkoder tipini kontrol ediniz. (PA002.3); 3. Motorla sürücünün eşleştiğini doğrulayınız. 4. Sürücünün ilişkilikazançlarını düşürün ( PA100, PA101,,PA102 yi artırın,vb); 5. PA005.3 ü artırarak işlemin güvenliğinden emin olunuz. Limit sinyalini kontrol ediniz. 1. Sürücünün güç zaman aralığı 5 saniyeden fazla ise; 2. Dışarıdan ciddi bir parazit olup olmadığını kontrol ediniz. 1. Enkoder bağlanıtısının doğru olup olmadığına bakınız. 2. Motoru değiştiriniz; 1. Enkoder bağlanıtısının doğru olup olmadığına bakınız. 2. Enkoder ekranlama bağlantısının servoya doğru bağlandığını kontrol ediniz. 3. Motoru değiştiriniz. Enkoder bağlanıtısının doğru olup olmadığına bakınız. Enkoder ekranlama bağlantısının servoya doğru bağlandığını kontrol ediniz. Motoru değiştiriniz. Enkoder bağlanıtısının doğru olup olmadığına bakınız. Enkoder ekranlama bağlantısının servoya doğru bağlandığını kontrol ediniz. Motoru değiştiriniz. Enkoder bağlanıtısının doğru olup olmadığına bakınız. Enkoder ekranlama bağlantısının servoya doğru bağlandığını kontrol ediniz. Motoru değiştiriniz. 1. Servo kapalıyken motorun yüksek hızda dönmesine bakınız. 2. Mutlak enkoder alarmını (AF.12) yi çalıştırınız.
111 Alarm No. Alarm ismi Hata Nedeni Çözüm Önerileri 3.Mutlak enkoderın bataryaya bağlı olup olmadığını kontrol ediniz. E.56 17bit serial enkoderde yanlış mutlak durumu 1. Enkoder çözümleme devresi zarar görmüş 2. Seri iletişim parazit kaptı; Mutlak enkoder alarm temizlemeyi ve multi-turn bilgisi temzileme operasyonunu çalıştırın (AF.11) E.57 17bit seri enkoder yanlış sayımı 1. Enkoder çözümleme devresi zarar görmüş 2. Seri iletişim parazit kaptı; Mutlak enkoder alarm temizlemeyi ve multi-turn bilgisi temzileme operasyonunu çalıştırın (AF.11) E.58 E.59 E.60 E.61 E.62 E.63 17bit seri enkoderın multi-turn bilgisinde taşma 17bit seri enkoder aşırı ısınma 17 bit seri encoderda Multi-turn bilgi hatası 17bit serial enkoder batarya alarmı 17bit serial enkoder batarya alarmı 17bit serial enkoder veri işleyemedi Multi-turn bilgi taşması Mutlak enkoder aşırı ısındı Multi-turn bilgi hatası Çok düşük batarya voltajı (3.1V den az) Battery voltajı 2.5V un altında multi-turn pozisyon bilgisi neredeyse kaybolacak 17 bit seri enkoderin saklama hafızasında veri hatası Mutlak enkoder alarm temizlemeyi ve multi-turn bilgisi temzileme operasyonunu çalıştırın (AF.11) 1. Motor ısısını kontrol ediniz. 2. Mutlak enkoder alarm temizlemeyi çalıştırın (AF.12) 1. Mutlak enkoderin batarya voltajını çalıştırın. 2. Mutlak enkoder alarm temizlemeyi ve multi-turn bilgisi temzileme operasyonunu çalıştırın (AF.11) 1. Mutlak enkoderin güç bataryasını değiştirin. 2. Mutlak enkoder alarm temizlemeyi çalıştırın (AF.12) 1. (AF.12) Mutlak enkoderin güç bataryasını değiştirin. Mutlak enkoder alarm temizlemeyi çalıştırın (AF.12) 1. PA002.3 motor enkoder modeliyle eşleştiğini doğrulayınız bit seri enkoder başlangıç durumuna getiriniz. E.64 17bit seri enkoderde veri ve rakam doğrulama 17 bit seri enkoderın saklama hafızasında anormal veri ve rakam doğrulama 1. PA002.3 motorun enkoderiyle eşleştiğini kontrol edin 2. 17bit seri enkoder başlangıç durumuna getiriniz.
112 E.67 Sürücü ve motor uyuşmazlığı Sürücü motorla eşleşemedi.(pa012) E.68 Motor model hatası Sürücü bu tip motorla çalıştırılmamalı E.69 E.70 E.71 Servo sürücü model hatası Motor bu servoyla eşleşmedi CAN iletişiminde CAN iletişiminde çok yüksek elektronik dişli hatası elektronik dişli oranı CAN iletişim hatası 10.3 Uyarı Listesi CAN hattı koptu veya CAN iletişim istemci tarafı hatası Bu alarm silinebilmesine ve hatta PA007.3 ile korunmasına rağmen, uygun olmayan eşleşme motorun performasına yansıyacaktır veya operasyon sırasında E.29 alarmı olabilir. 1. Motor modelinin PA012 den doğru seçildiğini kontrol ediniz. 2. Motorla eşleşen bir sürücü takınız. 3. PA012 değerini motor veya sürücü değiştirdikten sonra reset ediniz. Bu alarm silinebilmesine ve hatta PA007.3 ile korunmasına rağmen, uygun olmayan eşleşme motorun performasına yansıyacaktır veya operasyon sırasında E.29 alarmı olabilir. 2.Motor modelinin PA012 den doğru seçildiğini kontrol ediniz. 3. Motorla eşleşen bir sürücü takınız. 1.Bu alarm silinebilmesine ve hatta PA007.3 ile korunmasına rağmen, uygun olmayan eşleşme motorun performasına yansıyacaktır veya operasyon sırasında E.29 alarmı olabilir. 2.Motor modelinin PA012 den doğru seçildiğini kontrol ediniz. 3. Motorla eşleşen bir sürücü takınız. Sadece enkoder test modunda etkindir. PA949.3 = 1 İletişim kablosunu kontrol ediniz; kontrolcünün normal çalışığ çalışmadığını kontrol ediniz. Uyarı listesine aşağıdan ulaşabilirsiniz.. Alarm No. Alarm adı Uyarı içeriği A.90 Çok fazla pozisyon Birikmiş pozisyon sapması pulsesi ayarlanan oranı geçti sapması A.91 Aşırı yükleme Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. A.92 Rejenerasyon aşırı Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam yükleme ederse uyarı verilir. A.93 DF aşırı yükleme Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. A.94 Titreşim Motor dönerken görülen anormal titreşim A.95 Yüksek voltaj Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir.
113 A.96 A.97 Düşük voltaj 17bit seri enkoder batarya uyarısı Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. Çok düşük batarya voltajı (3.1V den az) 10.4 Uyarı Sebepleri ve Çözümü Alarm No. Alarm ismi Hata sebebi Çözüm A.90 Çok fazla pozisyon sapması A.91 Aşırı yükleme A.92 Rejenerasyon aşırı yükleme Birikmiş pozisyon sapması pulsesi ayarlanan oranı geçti Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. 1. Elektronik dişli oranını kontrol ediniz. 2. Herhangi bir limit olup olmadığını kontrol ediniz. 3. PA527 değerini artırınız. 1. Hızlanma ve yavaşlanma zamanını veya start stop zamanlarını artırın 2. PA010.3 ü artırınız. 3. Yükü azaltınız. 4. Daha yüksek güçlü servo sistem kullanınız. 1.Hızlanma ve yavaşlanma zamanını veya start stop zamanlarını artırın 2.PA010.2 yi artırınız. 3.Harici discharge direnci kullanınız. (yüksek güç az direnç) A.95 Yüksek voltaj Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. Hızlanma ve yavaşlanma zamanını veya start stop zamanlarını artırın A.96 Düşük voltaj Bu uyarı aşırı yüklemeyi belirtiyor.eğer çalışmaya devam ederse uyarı verilir. Giriş voltajının yeterli olup olmadığını kontrol ediniz. A.97 17bit seri enkoder batarya uyarısı Çok düşük batarya voltajı (3.1V den az) 1- Batarya voltajını kontrol ediniz. 2- Bataryayı değiştiriniz.
114 Bölüm XI Özellikler 11.1 Servo Sürücü Özellikleri Temel Özellikler Servo sürücünün temel özellikleri aşağıdaki gibidir. Temel Özellikler 3 Faz AC220V +10 ~ -15%, 50/60Hz 220V sistem Giriş Gücü 3 Faz AC380V +15 ~ -15%, 50/60Hz 380V sistem Kontrol Modları Tek faz veya 3 faz tam dalga doğrultma IGBT PWM kontrol,sinus dalga akım sürme Geri-Besleme İşlem Şartları Çalışması için Çevresel sıcaklık ve veri saklama sıcaklığı Çalışması için Çevresel nem ve veri saklama nem Titreme/Darbe Dayanımı Koruma Sınıfı / Temzlik Line-driver enkoder 5000ppr (1/20000 çözünürlük oranı, kazanç); 17bit seri enkoder: 17bit (kazanç/mutlak); Çevresel Sıcaklık : 0 ~ 55 C Depolama Sıcaklığı: - 20 ~ 85 C 90% dan az RH (donma ve çiğ) 4.9 m/s2 ~ 19.6 m/s2 Koruma Sınıfı: IP10; Temizlik: 2 Fakat,aşağıdaki durumlarda; Korozif veya yanıcı gaz olmayacak Su,yağ veya kimyasal sıçrama olmayacak Az toz,kül,tuz veya metal pudra Rakım 1000m den az Uygulama Standartları CE Yapı Destek Montaj Tipi Hız Kontrol Aralığı 1: 5000 Yük 0 ~ 100% yükte: ± 0.01% altında (nominal dalgalanması hızda) Hız Voltaj Nominal voltaj ± 10%: 0.001% (nominal dalgalanma dalgalanması hızda) Performans oranı Sıcaklık 25 ± 25 C: 0.1% altında (nominal hızda) dalgalanması Tork kontrol doğruluğu ± 3% (üretilebilirlik) 0 ~ 10S (Hızlanma ve yavaşlmaya göre Soft start zaman ayarı değişken) Faz A, Faz B, Faz Z: linear sürücü çıkışı Frekans bölücü pulse sayısı: Giriş/Çıkış Sinyali Enkoder frekans bölme çıkışı Line-driver enkoder 16 ~ enkoder hat sayısı; 17bit seri enkoder 16 ~ 16384; 8 puan
115 Ardışık Kontrol Giriş Sinyali Dağıtılabilir Giriş Sinyali Nokta Sayısı Fonksiyon 8 Nokta S-ON,kontrol mod değiştirme girişi,ileri limit(pot),geri limit(not),sapma sayicisi temizleme girişi(clr),alarm temizleme(a-rst),kazanç değiştirme girişi(gain),komut pulse engelleme(inhibit), vb.. Yukarda belirtilen sinyal dağıtımı ve pozitif/negative mantık kazanılmıştır. Ardışık Kontrol Çıkış Sinyali Dağıtılamaz giriş sinyali Dağıtılabilir giriş sinyali Nokta sayısı Nokta sayısı Fonksiyon 1 nokta. Alarm sinyali; 3 nokta Alarm sinyali (ALM), pozisyonlama tamamlama sinyali (COIN), Z pulse kollektör sinyali (CZ), harici fren sinyali (BK), servo hazır (S-RDY), vb. Yukarda belirtilen sinyal dağıtımı ve pozitif/negative mantık kazanılmıştır. İletişim Fonksiyonları RS485 iletişimi CANopen iletişimi Görüntüleme Ve Tuş Takımı Dinamik Fren (DB) Rejenerasyon işlemi Over-travel (OT) koruma fonksiyonu Koruma Fonksiyonu 1: N Iletişimi Adres değiştirme ayarı Bağlanma cihazı 1: N Iletişimi Adres değiştirme ayarı Bağlanma cihazı Röle ile N = 31 e kadar, Parametre ile ayarlanabilir. Bilgisayar ve Kontrolcü Röle ile N = 31 e kadar, Parametre ile ayarlanabilir. Kontrolcü 7-segment Kırmızı x 5 basamak, 4 tuş Over-travel(OT),ana devre gücü kapanması,servo alarmı,servo PASİF durumlarında kullanılır. Dahili rejeneratif direnç veya harici rejeneratif direnç Dinamik fren(db) durunca,azalma durunca veya POT veya NOT limitlerinde kullanılır Aşırı-akım,aşırı voltaj,düşük voltaj,fazla yük,rejenerasyon hatası,vb Hız,Pozisyon ve tork Kontrol Özellikleri
116 Servo sürücünün hız,pozisyon ve tork kontrol özellikleri aşağıdaki gibidir. Özellikler Kontrol Modu İleri besleme kompanzasyonu 0 ~100% (ayar birimi: 1%) Pozisyonlama tamamlama 0 ~ enkoder birimi genişlik ayarı Aşağıdakilerden birini seçiniz. Giriş Pulse Tipi Sembol+ Pulse dalgası, CW + CCW pulse dalgası, 90º 2 faz arasındaki faz farkı pulse Pozisyon Kontrol Hız Kontrol Tork Kontrol Giriş Sinyali Dahili pozisyon kontrol Giriş Pulse Formu Max.giriş pulse frekansı Sinyal Temizleme Pozisyon Seçimi Soft start zaman ayarı Giriş Sinyali Dahili Hız Kontrol Giriş Sinyali 11.2 Servo motor özellikleri Komut Voltajı Giriş Empedansı Hız Seçimi Komut Voltajı Giriş Empedansı (Faz A+ Faz B) Lineer sürücü ve açık kollektörü destekler Uzun-hat receiver drive: Sembol+ Pulse dalgası, CW pulse + CCW pulse dalgası; 4Mpps 90º 2-faz arasındaki faz farkı pulse: 1Mpps Lineer sürücü: Sembol+ Pulse dalgası, CW pulse + CCW pulse dalgası: 500pps 90º 2-faz arasındaki faz farkı pulse: 125Kpps Açık Kollektör: Sembol+ Pulse dalgası, CW pulse + CCW pulse dalgası : 200kpps 90º 2-faz arasındaki faz farkı pulse: 200kpps Sapma Pulse Temizleme Uzun-Hat receiver drive,lineer sürücü ve açık kollektör desteklenir Harici IO sinyal girişi seçimi 0 ~ 5S (hızlanma ve yavaşlamaya göre değişkenlik gösterir) Max. giriş voltajı: ± 10V (motor pozitif voltaj komutunda ileri hareket eder.) 9kΩ civarı Harici IO sinyal girişi seçimi Max. giriş voltajı: ± 10V (pozitif voltaj komutunda ileri hareketin tork çıkışı) 9kΩ çıkışı Çalışan Sistem : S1 devamlı Titreşim: 5G Yalıtım Direnci: DC500V, above 10MΩ Çalışma sıcaklığı: 0~40 (donmadan) Rakım: 1000m altında Isı direnç sınıfı: B Yalıtım direnç voltajı:ac1500v,1 dakika Montaj Modu:Flanş Çalışma nemi: 20%~80% (çiğ olmadan) Koruma: Tamamen Kapalı ve Kendinden soğutmalı IP65 (şaft parçası hariç)
117 /80 serisi servo motorların Parametre listesi Motor modeli 60DNMA1-0D 60DNMA1-0D 80DNMA1-0D 20D 40D 75D Temel No Nominal Çıkış W Nominal tork N m Ani max. tork N m Nominal akım Arms Ani max. akım Arms Nominal dönme hızı Min Max. dönme hızı Min Tork sabiti N m/arms Dönüş Ataleti Kg m 2 x serisi servo motorların Parametre listesi Voltaj Sınıfı 220V Motor modeli 130DNMA 130DNMA 130DNMA 130DNMA 1-0D85C C 1-01D2C 1-01D5C Temel No Nominal çıkış W Nominal tork N m Instantaneous max. tork N m Nominal akım Arms Instantaneous max. akım Arms Nominal dönme hızı Min Max. dönme hızı Min Tork sabiti N m/arms Dönüş Ataleti Kg m 2 x Servo Sürücünün Boyutları EPS-0D20A, EPS-0D40A (A Tipi Kasa) EPS-0D75A, EPS-0001A, EPS-01D5A (B Tipi Kasa)
118 Not: 1) Boyut birimi mm, ve ağırlık birimi Kg dir. 2) Boy ve ağırlık bilgisi bilgi verilmeden üründen ürüne değişebilir Servo Motor Boyutları /80 serisi motorların montaj boyutları: Birim (mm) Model Flanş boyutu Şaft Ucu Boyutu LC LA LB LZ S LJ J LF1 LLF2 LL LR LE LG 60DNMA1-0D20D DNMA1-0D40D DNMA1-0D75D
119 serisi motorların montaj boyutları: Birim (mm) Model Flanş Boyutu Saft ucu boyutları LC LA LB LZ S LJ J LF1 LLF2 LL LR LE LG 130DMNA1-0D85C DMNA1-0001C DMNA1-01D2C DMNA1-01D5C
120 Chapter XII EK 12.1 Motor Modlarının Listesi Görüntülem e No İçerik Birim dp 00 Motor hızı [r/min] dp 01 Motor geri besleme pulse sayısı(encoder,düşük 4 basamak) [1 Encoder pulse ] dp 02 Motor geri besleme pulse sayısı (encoder, yüksek 5 basamak) [10000 Encoder pulse ] dp 03 Motor komut giriş pulse sayısı (elektronik dişliden önce) [1 Instruction (kullanıcı birimi, düşük 4 basamak) pulse ] dp 04 Motor komut giriş pulse sayısı (elektronik dişliden önce) [10000 Encoder (kullanıcı birimi, düşük 5 basamak) pulse ] dp 05 Hata pulse sayısı (enkoder birim, düşük 4 basamak) [1 Encoder pulse ] dp 06 Hata pulse sayısı(enkoder birim, düşük 5 basamak) Pozisyon [10000 Encoder kontrolünde düşük 5 basamak) pulse ] dp 07 Hız komutu (analog voltaj komutu) [V] dp 08 Dahili Hız Komutu [r/min] dp 09 Tork Komutu (analog voltaj komutu) [V] dp 10 Dahili Tork Komutu (nominal torka bağlı) [%] dp 11 Tork geri-besleme (nominal torka bağlı) [%] dp 12 Giriş Sinyali Görüntüleme -- dp 13 Çıkış Sinyali Görüntüleme -- dp 14 Komut pulse frekansı [0.1Khz] dp 15 Ana devre voltajı [V] dp 16 Toplam İşlem Zamanı [Hous] dp 17 Dönüş Açısı [deg] dp 18 Enkoder gerçek pozisyonu(tek veya çoklu dönüş enkoder) [2 Encoder pulse ] dp 19 Enkoder dönüş sayısı (sadece mutlak değer enkoderin de etkindir) [1 ring] dp 20 Kümülatif yük faktörü (kümülatif yükün %100 olduğundaki nominal değeri) [%] dp 21 Rejenerasyon yük faktörü (rejeneratif yükün %100 olduğundaki nominal değeri) [%] dp 22 DB yük faktörü(db yükü %100 olunca nominal değeri) [%] dp 23 Yükün atalet oranı [%] dp 24 Efektif kazanç görüntüleme 1: Anlamı birinci grup kazancı dp 25 Saklı dp 26 Saklı dp 27 Saklı dp 28 Yük atalet değeri(otomatik) 0.1Kgcm 2 dp 29 Saklı 12.2 Ek Fonksiyonların Listesi AF No Fonksiyonlar Referans AF 00 Hata günlüğü görüntüleme 6.2 AF 01 Yer tanımlama (pozisyon kontrolünde aktiftir) 6.3 AF 02 Jog işlemi 6.4 AF 03 Ön Panel Kilitleme 6.5
121 AF No Functions Referans AF 04 Alarm Günlüğü Temizleme 6.6 AF 05 Parametre başlatma 6.7 AF 06 Analog miktarın kendinden ayarlanması (hız ve tork) komut offseti 6.8 AF 07 Hız Komut Offsetinin manuel ayarlaması 6.9 AF 08 Tork Komut Offsetinin manuel ayarlaması 6.10 AF 09 İlgili Motor Parametrelerinin kontrolü 6.11 AF 10 Servo sürücü yazılım versiyonu görüntüleme 6.12 AF 11 Mutlak enkoder değeri ayarlama 6.13 AF 15 Yük ataletinin manuel algılanması Kullanıcı Parametrelerinin Listesi Kullanıcı Parametrelerinin Görüntüleme Modları Kullanıcı parametreleri aşağıdaki yollarla görüntülenebilir Parametre Seçim Görüntüleme Modları Parametrenin her bitinin ayrı bir fonksiyonu vardır. Aşağıda parametre seçim fonkisyonlarıyla ilgili bilgilere ulaşabilirsiniz. Parametre Anlamı PA000.0 or n. x x x Anlamı PA000 parametresinin 0 ıncı basamağına denk geldiğini anlatmaktadır. PA000.1 or n. x x x Anlamı PA000 parametresinin 1 inci basamağına denk geldiğini anlatmaktadır. PA000.2 or n. x x x Anlamı PA000 parametresinin 2 inci basamağına denk geldiğini anlatmaktadır. PA000.3 or n. x x x Anlamı PA000 parametresinin 3 üncü basamağına denk geldiğini anlatmaktadır. n. x x x x Anlamı b. x x x x, d. x x x x veya h. x x x x Bsmak 0 Bsmak 0 Bsmak 0 Bsmak 1 Bsmak 1 Bsmak 1 Bsmak 2 Bsmak 2 Bsmak 2 Bsmak 3 Bsmak 3 Bsmak 3 b: 2 lik sistem,basamak değeri: 0 ~ 1; d: 10 luk sistem,basamak değeri: 0 ~ 9; h: 16 lık sistem,basamak değeri: 0 ~ F;
122 Parametre No. PA000 İsim Ayar Aralığı Birim Fabrika Ayarları Fonksiyon değişiminde temel seçim 1 H. a a a a a a a a a a a a a a a a a Etki zamanı h.000~01a1 h.000 Reset Dönme Yönü Seçimi 0 = Normal Mod 1 = Ters Mod Kontrol Mod Seçimi 0 = Pozisyon kontrol (pulse komutu) 1 = Hız kontrol (analog komut) 2 = Tork kontrol (analog komut) 3 = Dahili hızı control (junction komut) 4 = Pozisyon control (analog komut) 5 = Hız kontrol (analog komut) 6 = Tork kontrol (analog komut) 7 = Pozisyon kontrol (pulse komutu) Hız kontrol analog komut) 8 = Tork kontrol (analog komut) 9 = Tork kontrol (analog komut) Hız kontrol (analog komut) A = Dahili pozisyon kontrolü (junction komut) Saklı Saklı Referans PA001 Fonksiyon değişiminde temel seçim 2 H d.0000~0264 d.0000 Reset Servo OFF ve uyarı durumunda durma 0 = Motor DB (dinamik fren) ile durur. 1 = Motor DB ile durur ve DB bırakılır. 2 = DB kullanılmaz fakat boş durumuna ayarlanır. 3 = Motor servo OFF iken PA522 yavaşlamasıyla durur;hız PA523 e düşürüldüğünde motor DB durumuna geçer. 4 = Motor servo OFF iken PA522 yavaşlamasıyla durur;hız PA523 e düşürüldüğünde motor DB durumuna geçer. Over-travel (OT) durumunda Durma 0 = DB ile durma ya da normal durma (durma metodu PA arasındakiyle aynı) 1 = Motor PA406 tork ayarıyla durur,ve sonra servo kilitleme durumuna geçer. 2 = Motor PA406 tork ayarıyla durur,ve sonra doğal işlem durumuna geçer. 3 = Motor PA406 tork ayarıyla durur,ve sonra DB durumuna geçer. 4 = Motor PA406 tork ayarıyla ve PA522 yavaşlamasıyla durur,ve sonra servo kilitleme durumuna geçer. 5 = Motor PA406 tork ayarıyla ve PA522 yavaşlamasıyla durur,ve sonra doğal işlem durumuna geçer. 6 = Motor PA406 tork ayarıyla ve PA522 yavaşlamasıyla durur,ve sonra DB durumuna geçer. AC/DC Güç Giriş Seçimi 0 = AC güç girişi:l1,l2 ve L3 terminal girişlerinde Tek Faz AC220V güç girişi 1 = AC güç girişi: :L1,L2 ve L3 terminal girişlerinde Üç Faz AC220V güç girişi 2 = DC güç girişi: DC310V güç girişi gösterilen ( P+ ve ) terminallerden sağlanır. SAKLI
123 Parametre No. İsim Ayar Aralığı Birim Fabrika Ayarları Etki zamanı Referans PA002 PA003 PA004 PA005 PA006 Fonksiyon değişiminde temel seçim 3 H Fonksiyon değişiminde temel seçim 4 H Fonksiyon değişiminde temel seçim 6 H d.0000~2112 d.0000 Reset Hız/pozisyon kontrol seçimi (T-REF dağıtımı) 0 = T-REF dağıtımı yok 1 = T-REF i harici analog tork limit girişi olarak kullanma 2 = PCL ve NCL yi harici tork limit girişi olarak kullanma Tork kontrol seçimi (V-REF dağıtımı) 0 = V-REF dağıtımı yok 1 = V-REF in harici hız limit girişi olarak kullanılması Mutlak Enkoder Kullanma 0 = Mutlak enkoderin kazanç enkoder olarak kullanılması 1 = Mutlak enkoderin mutlak enkoder olarak kullanılması Enkoder tipi seçimi 0 = Mutlak enkoder (17bit tek dönüş, 16bit çoklu dönüş için) 1 = Tek-dönüş mutlak enkoder (17bit tek dönüş için) 2 = Line-driver enkoder (5000ppr) d.0000~0111 d.0011 Reset İleri Limit (over travel) 0 = İleri Limit (POT) sinyali aktif 1 = İleri Limit (POT) sinyali pasif Geri Limit (over travel) 0 = Geri (NOT) limit sinyali aktif 1 = Geri limit (NOT) sinyali pasif Limit (over travel) alarm seçimi 0 = Sürücü POT/ NOT tek yönlü girişlere alarm vermez. 1 = Err.35 [limit girişi koruması] görülür, (POT/ NOT tek yönlü girişlerde) SAKLI SAKLI d.0000~0044 d.0000 Reset Hız komut cevabı 0-4 = Değerin yüksek olması komut cevabını yavaşlatır Hız geri besleme cevaplanabilirliği 0-4 = Değerin yüksek olması hız geri besleme cevabını yavaşlatır. SAKLI SAKLI SAKLI
124 Parametre No. İsim Ayar Aralığı Birim Fabrika Ayarları Etki zamanı Referans PA007 Fonksiyon değişiminde temel seçim 8 H d.0000~1111 b.0000 Reset Alarm/Uyarı voltajını ayarlama 0 = Düşük batarya voltajını (below 3.1V) hata olarak ayarlayınız (E.61) 1 = Düşük batarya voltajını (below 3.1V) alarm olarak ayarlayınız. (A.97) Mutlak enkoder çoklu-dönüş verisini alarm olarak ayarlama 0 = Mutlak enkoder çoklu dönüş verisi taştığında E.58 alarmı verilmesi 1 = Taşma durumunda alarm verilmemesi Hata Algılama 0 = Alarm algılandı 1 = Alarm algılanmadı SAKLI PA008 SAKLI b.0000~1111 b.0000 Reset PA009 PA010 Fonksiyon değişiminde temel seçim 10 H Fonksiyon değişiminde temel seçim 6 H d.0000~0011 b.0000 Reset Fren direnci ve Döngü Seçimi 0 = Algılandı; hata durumunda E.17 verilir 1 = Algılanmadı Fren direnci ve Döngü Seçimi 0 = Sürücünün dahili direnci kullanılmıştır 1 = Harici direnç kullanma.lütfen (PA537, PA538) parametrelerini ayarlayınız. SAKLI SAKLI d.0000~5553 d.0021 Hemen SAKLI Analog komut giriş gecikmesi 0-5 = Değerin yükselmesi komut gecikmesini artırır,ama daha hassas ölçümler elde edilir. Harici rejeneratif direnç yük oranı seçimi 0-5 = Değerin artması aşırı yükleme zamanını uzatır. Motor aşırı yükleme sınıfı ayarı 0-5 = Değerin artması aşırı yükleme zamanını uzatır. PA011 SAKLI Reset PA012 Motor Model Seçimi Reset PA013 SAKLI Başlangıçta gösterilen sayı 0~50 50 Reset PA014 Görüntüleme içeriğine bakınız.50 ayarlandığı zaman,durum kodu gösterilir.50 den farklı ayarlanırsa,başlangıçta gösterilen içerik görüntüleme sayısına bağlı olarak gösterilir.
125 Parametre No. PA015 PA016 İsim Ayar Aralığı Birim Fabrika Ayarları Etki zamanı RS485 1~31 1 Hemen Iletişim adresi RS485 iletişim fonksiyonu seçimi d d.0000 ~ 0095 d.0095 Hemen RS485 İletişim oranı 0 = 2400 bps 1 = 4800 bps 2 = 9600 bps 3 = 19200bps 4 = 38400bps 5 = 57600bps İletişim protokolü 0 = 8, N, 1 (Modbus Protokol, RTU mod) 1 = 8, N, 2 (Modbus Protokol, RTU mod) 2 = 8, E, 1 (Modbus Protokol, RTU mod) 3 = 8, O, 1 (Modbus Protokol, RTU mod) 4 = 7, N, 2 (Modbus Protokol, ASCII mod) 5 = 7, E, 1 (Modbus Protokol, ASCII mod) 6 = 7, O, 1 (Modbus Protokol, ASCII mod) 7 = 8, N, 2 (Modbus Protokol, ASCII mod) 8 = 8, E, 1 (Modbus Protokol, ASCII mod) 9 = 8, O, 1 (Modbus Protokol, ASCII mod) SAKLI SAKLI Referans PA017 Saklı 1 ~ PA018 Saklı d.0000 ~ 0006 d.0003 PA019 PA020 PA021 PA022 PA023 PA024 PA100 Saklı Saklı Saklı Saklı Saklı Saklı İlk Pozisyonlama döngü kazancı 1 ~ /s 40 Hemen Pozisyon kontrol sisteminin cevaplanabilirliğine karar verir.eğer yüksek bir değer atanırsa,pozisyonlama zamanı kısalır.buna ragmen yüksek bir değerde titreme görülebilir,lütfen düzenleme yaparken bunu göz önünde bulundurunuz. İlk Hız Döngü Kazancı 0~50 50 Reset PA101 Hız döngüsünün cevaplama karakteristiğini verir. Pozisyonlama kazancının aratırılması sistemin total cevaplama karakteristiğini geliştirdiği için,hız döngü kazancı artırılmalıdır. Buna ragmen yüksek bir değerde titreme görülebilir,lütfen düzenleme yaparken bunu göz önünde bulundurunuz. PA102 İlk Hız Döngüsünün İntegral Zaman 1 ~ ,1ms 200 Hemen
126 Parametre No. PA103 PA104 İsim Ayar Aralığı Birim Fabrika Referans Etki zamanı Ayarları Sabiti Zaman sabiti,integral zaman sabitini ayarlamak için kullanılır. Değerin küçük ayarlanması,integral fonksiyonunun artmasına ve daha güçlü anti-parazit özelliği kazanır.ama fazlası titremeye neden olur. İlk Hız Algılama 0 ~ ms 10 Hemen Fitresi Hız algılandıktan sonra,low-pass filtrenin zaman sabiti ayarlanabilir. Değerin fazla olması zman sabitinin artırır fakat motor gürültüsü azalmasına ragmen cevaplanabilirlik düşer. İlk Tork Filtresi 0 ~ ms 30 Hemen Birinci dereceden gecikme filtresi zaman sabiti ayarlanır.sapma salınımı ile titremeyi kontrol edebilir. Değerin fazla olması zman sabitinin artırır fakat motor gürültüsü azalmasına ragmen cevaplanabilirlik düşer. PA105 PA106 PA107 PA108 PA109 PA110 PA111 PA114 PA115 PA116 PA117 PA118 PA119 PA120 İkinci pozisyon dönüş kazancı İkinci hız dönüş kazancı İkinci hız dönüş integral zaman sabiti İkinci hız algılama sabiti İkinci Tork Filtresi Hız ileri-besleme 1 ~ /s 40 Hemen 1 ~ Hz 80 Hemen 1 ~ ms 10 Hemen 1 ~ ms 5 Hemen 0 ~ ms 20 Hemen 0 ~ 100 % 0 Hemen Hız kontrol komutu daihili pozisyon komutuna bağlı olarak hesaplanırsa,değeri bu parametre oranı ile pozisyon kontrolündeki hız komutu ile çarparak ekleyiniz. Hız ileri besleme filtresi 0 ~ ms 0 Hemen Birinci dereceden gecikme filtresinin zman sabiti hız ileri besleme girişi için ayarlama Sürtünme kompanzasyon kazancı 1 ~ % 0 Hemen Sürtünme kompanzasyon yumuşatma kazancı 0 ~ % 0 Hemen Sürtünme kompanzasyon eşik hızı 0 ~ rpm 100 Hemen Saklı Atalet Oranı 0 ~ % 200 Hemen İlgili motor atalaeti ve yük atalet orannı ayarlayınız PA118 = (Yük ataleti / Rotor Ataleti) x 100 [%]. Bu parametre gerçek zamanlı otomatik kazanç ayarlamasında etkin değildir. Saklı 0 ~ ms 0 Kazanç uygulama d.0000 ~ seçimi d.0000 Hemen 127
 Hız Komutu ile (parametre: PA122) Hızlanma ile")
 0 ~ 3000 1min-1 0 Hemen Mod değiştirme 0 ~ (hızlanma) 65535 10rpm 0 Hemen Mod değiştirme 0 ~ (pozisyon sapması) 65535 0 Hemen Kazanç uygulama seçimi d.0000~ 2 0092 d.")
127 Parametre No. İsim Ayar Aralığı Birim Dgt 3 Dgt 2 Dgt 1 Dgt 0 Fabrika Ayarları Etki zamanı Referans Analog switch değiştirme Dahili Tork Komutu ile(parametre: PA121) Hız Komutu ile (parametre: PA122) Hızlanma ile (parametre: PA123) Pozisyon sapma pulse ile (parametre: PA124) No mode switch function Saklı Saklı PA121 PA122 PA123 PA124 PA125 Saklı Mod değiştirme (tork komutu) 0 ~ 300 1% 200 Hemen Mod değiştirme (hız komutu) 0 ~ min-1 0 Hemen Mod değiştirme 0 ~ (hızlanma) rpm 0 Hemen Mod değiştirme 0 ~ (pozisyon sapması) Hemen Kazanç uygulama seçimi d.0000~ d.0000 Hemen Dgt 3 Dgt 2 Dgt 1 Dgt 0 Kazanç değiştirme seçimi Kazanç değiştirme kullanılmıyor Manual kazanç değiştirme Otomatik kazanç değiştirme Eğer değiştirme şartı A sağlanırsa,ilk kazanç otomatik olarak ikinci kazanca dönüşür. aaaaaaa Kazanç Değiştirme Şartı A Saklı Pozisyonlama Tamamlama Sinyali ON Pozisyonlama Tamamlama Sinyali OFF Yakın sinyali (NEAR) ON Yakın sinyali (NEAR) OFF Pozisyon filtre çıkışı = 0, ve komut pulse girişi OFF Pozisyon komut pulse girişi ON Tork komutu PA126 değerinden büyük Hız komutu PA127 değerinden büyük Hız komutu çeşitliliği PA128 değerinden büyük Pozisyon sapması PA129 değerinden büyük PA126 PA127 PA128 Saklı Kazanç değişim sınıfı (tork komutu) Kazanç değişim sınıfı (hız komutu) 0 ~ 3000 Kazanç değişim sınıfı (hız komutu 0 ~ 300 1% 200 Hemen 0 ~ min rpm /s 100 Hemen Hemen 128
 Fabrika Ayarları Etki zamanı Referans PA129 Kazanç değişim sınıfı (pozisyon 0 ~ 65535 1 pulse 100 Hemen komutu) PA130 Kazanç değişim zamanı 1 0 ~ 10000 0.")
128 Parametre No. İsim Ayar Aralığı Birim çeşitliliği) Fabrika Ayarları Etki zamanı Referans PA129 Kazanç değişim sınıfı (pozisyon 0 ~ pulse 100 Hemen komutu) PA130 Kazanç değişim zamanı 1 0 ~ ms 10 Hemen PA131 Kazanç değişim zamanı 2 0 ~ ms 10 Hemen PA132 Kazanç değişim bekleme zamanı 1 0 ~ ms 10 Hemen PA133 Kazanç değişim bekleme zamanı 2 0 ~ ms 10 Hemen PA134 Saklı 0 ~ PA136 Saklı PA137 Saklı 0 ~ PA138 Saklı 0 ~ PA139 Saklı 0 ~ 10 0 PA140 Saklı 0 ~ PA141 Saklı 0 ~ PA142 Saklı PA200 Pozisyon Kontrol Power-on Fonksiyonu Değişimi 1 d.0000~ 1232 d.0000 again Dgt 3 Dgt 2 Dgt 1 Dgt 0 Komut pulse formu Sembol + Pulse Faz A + Faz B (4 kat frekans) Pulse sinyal negation işlemi Neither PULS nor SIGN is negated PULS is not negated, but SIGN is negate PULS is negated, but SIGN is not Both PULS and SIGN are negated Pulse temizleme işlemi Servo PASİF ve alarm varken sapma pulse temizleme Sapma pulse i temizlemeyiniz. (temizleme sadece CLR sinyali ile yapılabilir ve OT durumunda kilitlenmede de silinebilir.). Sadece alrm verildiğinde pozisyon sapmasını siliniz. PA201 Pozisyon Kontrol Fonksiyonu Değişimi 2 Pulse giriş kanalı seçimi PULS ve SIGN girişi (düşük hız pulse kanalı) ve SIGNH girişi (yüksek hız pulse kanalı) d.0000~3 d PULSH Power-on again 129

129 Parametre No. İsim Ayar Aralığı Birim Dgt 3 Dgt 2 Dgt 1 Dgt 0 Fabrika Ayarları Etki zamanı Referans Saklı Saklı Frequency division pulse input logic inversion No negation Negation PA202 Pozisyon Kontrol Fonksiyonu Değişimi 3 Dgt 3 Dgt 2 Dgt 1 Dgt 0 Frequency division pulse extension 0: Frequency division Z pulse signal is not extended; other numbers: Frequency division Z pulse signal is extended. d.0000~00 12 d.0000 Hemen Pozisyonlama sinyal (COIN) çıkış şartı Pozisyon sapma mutlak değeri pozisyonlama tamamlama parametresinden (PA525) az olursa çıkış verilir. Pozisyon sapma mutlak değeri pozisyonlama tamamlama parametresinden (PA525) az olursa ve pozisyon komut filtresi 0 olduktan sonra çıkış verilir. Pozisyon sapma mutlak değeri pozisyonlama tamamlama parametresinden (PA525) az olursa ve pozisyon komutu 0 olursa çıkış verilir. Saklı Saklı Saklı PA203 PA204 PA205 PA206 PA207 PA208 PA209 PA210 PA211 PA212 PA213 PA214 Saklı Saklı İlk elektronik dişli oranı 1 ~ (numerator) 1 Hemen Elektronik dişli oranı (denominator) 1 ~ Hemen İkinci elektronik dişli oranı (numerator) 1 ~ Hemen Üçüncü elektronik dişli oranı (numerator) 1 ~ Hemen Dördüncü elektronik dişli oranı (numerator) 1 ~ Hemen Enkoder frekans-bölme Power-on 16 ~ P/Rev pulse sayısı again Pulse çıkışının çözünürlük oranı OA ve OB nin 1 dönüşündeki çıkış pulselerine göre ayarlanır. PA201 değeri enkoder hat sayısını aşarsa,enkoder hat sayısı sürtünme frekansı değeri olur. 5000ppr kazanç enkoderi kullanılırsa,pa210 değeri 5000 den fazla ayarlandığında ve frekans bölme oulse sayısı enkoder hat sayısı 5000 dir. Saklı Saklı Saklı Pozisyon Komut hızlanma/azalma zamanı 0 ~ ms 0 Hemen parametresi 1 130

130 Parametre No. PA215 İsim Ayar Aralığı Birim Pozisyon Komut hızlanma/azalma zamanı parametresi 2 Fabrika Ayarları Etki zamanı 0 ~ ms 0 Hemen Referans PA216 Pozisyon Komut ortalama filtresi 0 ~ ms 0 Hemen PA217 PA218 PA219 PA300 Saklı Saklı Saklı Hız Kontrol Fonksiyon Değiştirme d.0000 ~ 1333 d.0200 Power-on again Dgt 3 Dgt 2 Dgt 1 Dgt 0 aaaaaa Hız komut filtre formu Lineer filtre S eğrisi Birincil Filtreleme Saklı Manuel yük atalet 1 dönüş 2 dönüş 4 dönüş 8 dönüş PA301 Hız Komut giriş kazancı Hız ölü bölge Kontrol Harici IO (ZEROSPD) kontrol kullanılır. Otomatik (PA316 ve ZEROSPD sinyali yok sayılarak hız bölgesi atanır.) 150 ~ V / Nomin al hız 600 Hemen PA302 Hız komut filtreleme zaman 0 ~ ms 0 Hemen sabiti PA303 Komut lineer hızlanma zamanı 0 ~ ms 0 Hemen PA304 Komut lineer yavaşlama zamanı 0 ~ ms 0 Hemen PA305 Komut S stili hızlanma/yavaşla 0 ~ ms 0 Hemen ma zamanı PA306 JOG hızı 0 ~ min Hemen PA307 Dahili sıfırıncı hız ~ min Hemen PA308 Dahili birinci hız ~ min Hemen PA309 Interna ikinci hız ~ min Hemen PA310 Dahili üçüncü hız ~ min Hemen PA311 Dahili dördüncü hız ~ min Hemen PA312 Dahili beşinci hız ~ min Hemen PA313 Dahili altıncı hız ~ min Hemen PA314 Dahili yedinci hız ~ min Hemen 131
131 Parametre No. PA315 İsim Ayar Aralığı Birim Sıfır-Hız Kenetleme fonksiyon seçimi Fabrika Ayarları Etki zamanı 0 ~ 2 0 Hemen Referans [0] PA300.3 sıfır hız kenetleme fonkisyonu ayarlandıktan sonra,hız komutu 0 olmaya zorlanır. [1] PA300.3 sıfır hız kenetleme fonkisyonu ayarlandıktan sonra,hız komutu 0 olmaya zorlanır; ve motorun gerçek hızı PA316 nın altına düştüğünde(sıfır hız kenetleme sınıfı), Pozisyon kontrolüne geçer ve servo bu pozisyonda kilitlenir.sıfır hız kenetleme sinyali etkin olmadığında veya kontrol modu değiştirildiğinde,sıfır-kenetlemeden çıkar. [2] PA300.3 sıfır hız kenetleme fonkisyonu ayarlandıktan sonra, PA522 yavaşlamasıyla ve motorun hızı PA316 dan düşük olduğunda Pozisyon kontrolüne geçer ve servo bu pozisyonda kilitlenir.sıfır hız kenetleme sinyali etkin olmadığında veya kontrol modu değiştirildiğinde,sıfır-kenetlemeden çıkar.bu durma modu sadece PA300.0 ile olur. PA316 PA317 PA318 PA400 PA401 PA402 PA403 PA404 PA405 Sıfır-hız kenetlenme sınıfı Saklı Saklı Hızıkomut giriş kazancı 1 ~ 2000 rpm 30 Hemen 10 ~ V / Rated torque 30 Hemen Tork giriş filtre zaman sabiti 0 ~ ms 0 Hemen İleri yönlü tork limiti 0 ~ 300 1% 300 Hemen Geri yönlü tork limiti 0 ~ 300 1% 300 Hemen İleri yönlü harici tork limiti 0 ~ 100 1% 100 Hemen Geri yönlü harici tork limiti 0 ~ 100 1% 100 Hemen PA406 Acil stop tork limiti 0 ~ 300 1% 300 Hemen PA407 tork kontrolde hız limiti 0 ~ min Hemen PA408 Saklı PA409 Saklı Hemen PA410 Segment 1 notch filtre frekansı 50 ~ Hz 2000 Hemen PA411 Segment 1 notch filtre frekansı 0 ~ 32 db 0 Hemen zayıflatma oranı PA412 Segment 2 notch filtre frekansı 50 ~ Hz 2000 Hemen PA413 Segment 2 notch filtre frekansı 0 ~ 32 db 0 Hemen PA414 Saklı PA415 Saklı PA416 Saklı 132
132 Parametre Fabrika İsim Ayar Aralığı Birim No. Ayarları Etki zamanı PA417 Saklı PA418 Saklı PA419 Saklı Port DI1 giriş sinyal seçimi 0 ~ 25 0 Hemen [0] Servo-aktif (S-ON) [1] Kontrol Mod Değişimi(C-MODE) [2] İleri Limit (POT) [3] Geri Limit(NOT) [4] Sapma sayıcısı temizleme(clr) [5] Alarm reset (A-RST) [6] Pulse girişi engelleme (INHIBIT) [7] PA500 Sıfır-hız yenileme (ZEROSPD) [8] Pozitif tork limiti (PCL) [9] Negatif tork limiti (NCL) [10] Kazanç değişimi(gain) [11] Sıfır Sinyali (ZPS) [12] Hafıza [13] Komut frekans bölücüsü/çarpma switch 0 (DIV0) [14] Komut frekans bölücüsü/çarpma switch 1 (DIV1) [15] Dahili komut hız seçimi 0(INSPD0) [16] Dahili komut hız seçimi 1(INSPD1) [17] Dahili komut hız seçimi 2(INSPD2) [Diğer] Özel Fonksiyon ve Kullanımı PA501 Port DI2 giriş sinyal seçimi 0 ~ 25 1 Hemen PA502 Port DI3 giriş sinyal seçimi 0 ~ 25 2 Hemen PA503 Port DI4 giriş sinyal seçimi 0 ~ 25 3 Hemen PA504 Port DI5 giriş sinyal seçimi 0 ~ 25 4 Hemen PA505 Port DI6 giriş sinyal seçimi 0 ~ 25 5 Hemen PA506 Port DI7 giriş sinyal seçimi 0 ~ 25 6 Hemen PA507 Port DI8 giriş sinyal seçimi 0 ~ 25 7 Hemen PA508 Giriş sinyal formu seçimi 1 b.0000 ~ 1111 b.0000 Hemen Referans 133
 Sinyal H seviyesi pasif")
133 Parametre No. İsim Ayar Aralığı Birim Fabrika Ayarları Etki zamanı Referans Dgt 3 Dgt 2 Dgt 1 Dgt 0 DI 1 Giriş Sinyal Seçimi Sinyal L seviyesi aktif (optik-bağdaştırıcı iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) DI 2 Giriş Sinyal Seçimi Sinyal L seviyesi aktif (optik-bağdaştırıcı iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) DI 3 Giriş Sinyal Seçimi Sinyal L seviyesi aktif (optik-bağdaştırıcı iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) PA509 Giriş sinyal formu seçimi 2 DI 4 Giriş Sinyal Seçimi Sinyal L seviyesi aktif (optik-bağdaştırıcı iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) b.0000~1111 b.0000 Immedi ately Dgt 3 Dgt 2 Dgt 1 Dgt 0 DI 5 Giriş Sinyal Seçimi Sinyal L seviyesi aktif (optik-bağdaştırıcı iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) DI 6 Selection of input signal aspect DI 6 Giriş Sinyal Seçimi Signal Sinyal L level seviyesi active aktif (opticalcoupler (optik-bağdaştırıcı conductive) iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) DI 7 Giriş Selection Sinyal of Seçimi input signal aspect Signal L seviyesi aktif (optik bağdaştırıcı iletken) Signal H seviyesi aktif (optik-bağdaştırıcı yalıtkan) PA510 Giriş sinyal formu seçimi DI 8 Giriş Sinyal Seçimi Sinyal L seviyesi aktif (optik-bağdaştırıcı iletken) Sinyal H seviyesi pasif (optik-bağdaştırıcı yalıtkan) d.0000~9990 d.3210 Hemen 134
 DO 2 çıkış sinyal seçimi Alarm sinyal çıkışı (ALM) Pozisyon")
134 Parametre No. İsim Ayar Aralığı Birim Fabrika Ayarları Etki zamanı Referans Dgt 3 Dgt 2 Dgt 1 Dgt 0 DO 1 output signal Alarm sinyal çıkışı (ALM) DO 2 çıkış sinyal seçimi Alarm sinyal çıkışı (ALM) Pozisyon tamamlama (COIN) Z pulse kollektör sinyali (CZ) Harici fren null sinyalil (BK) Servo hazır çıkışı (S-RDY) Hız uyumluluk çıkışı (VCMP) Motor dönme algılaması (TGON) Tork limitleme sinyali (TLC) Sıfır-Hız Algılama Sinyali (ZSP) Uyarı çıkışı (WARN) DO 3 çıkış sinyal seçimi DO2 sinyal dağıtımı gibi DO 4 çıkış sinyal seçimi DO2 sinyal dağıtımı gibi PA511 Output sinyal tersleme b.0000 ~ 1111 b Hemen Dgt 3 Dgt 2 Dgt 1 Dgt 0 DO 1 çıkış sinyal seçimi ERR sinyali verildiğinde,optik bağdaştırıcı cut-off olur,alarm verilmediğinde,optik-bağdaştırıcı başarıyla çalışır. ERR sinyali verildiğinde, optik-bağdaştırıcı başarıyla çalışır,alarm verilmediğinde optik bağdaştırıcı cut-off olur. DO 2 çıkış sinyal seçimi ERR sinyali verildiğinde, optik-bağdaştırıcı başarıyla çalışır,alarm verilmediğinde optik bağdaştırıcı cut-off olur. ERR sinyali verildiğinde,optik bağdaştırıcı cut-off olur,alarm verilmediğinde,optik-bağdaştırıcı başarıyla çalışır. DO 3 çıkış sinyal seçimi ERR sinyali verildiğinde, optik-bağdaştırıcı başarıyla çalışır,alarm verilmediğinde optik bağdaştırıcı cut-off olur. ERR sinyali verildiğinde,optik bağdaştırıcı cut-off olur,alarm verilmediğinde,optik-bağdaştırıcı başarıyla çalışır. DO 4 çıkış sinyal seçimi ERR sinyali verildiğinde, optik-bağdaştırıcı başarıyla çalışır,alarm verilmediğinde optik bağdaştırıcı cut-off olur. PA512 PA513 PA514 PA515 PA516 PA517 PA518 Giriş Sinyal Filtre Zamanı Seri enkoder iletişim alarm zamanı Saklı Sıfır düzenlenmiş değer ERR sinyali verildiğinde,optik bağdaştırıcı cut-off olur,alarm verilmediğinde,optik-bağdaştırıcı başarıyla çalışır. 1 ~ ms 10 Hemen 1 ~ ms 5 Hemen 0 ~ min Hemen Algılanan dönme 1 min 1 ~ 3000 değeri Hemen Aynı-hız sinyal algılama genişliği 1 ~ min-1 10 Hemen Fren Komutu Servo PASİF gecikme 0 ~ ms 100 Hemen 135
135 Parametre No. PA519 PA520 PA521 PA522 PA523 PA524 PA525 PA526 PA527 PA528 İsim Ayar Aralığı Birim Fabrika Referans Etki zamanı Ayarları zamanı Fren komut işlem hız 0 ~ 1000 limiti 1 min Hemen Servo PASİF-fren komut bekleme 100 ~ ms 500 Hemen zamanı Anlık güç kaybı tutma 40 ~ ms 60 Hemen zamanı Servo PASİF durma hızlanması 0 ~ ms 100 Hemen Servo PASİF durma eşiği 20 ~ 2000 rpm 50 Hemen Saklı Pozisyonlama tamamlama eşiği 0 ~ Pulse 10 Hemen NEAR sinyal genişliği 0 ~ pulse 100 Hemen Servo AKTİF iken pozisyon 1 ~ r 200 Hemen Fazla-sapma uyarım değeri(warn) Birim 0.01r dir.enkoder farklı çözünürlük oranlarında çeşitilik olabilir.örnek olarak Enkoder çöznürlük oranı 5000ppr ise,birim 5000*4*0.01=200pulse dir.; eğer uyarı ayarı 200 ayarlanırsa, fazla-sapma uyarım değeri 200*200=40000 pulse olur. Servo AKTİF iken Çok fazla pozisyon sapma 1 ~ r 500 Hemen değeri(err) PA529 PA530 PA531 PA532 PA533 PA534 PA535 PA536 Hız sapma alarm algılama zamanı 20 ~ ms 300 Hemen Hız sapma alarm eşik sınıfı 0 ~ 10 5 Hemen Eğer hız sapması eşiği geçerse, E.28 (hız aşırı-sapma koruması) ortaya çıkar.eğer değer 10 olarak ayarlanırsa,hız aşırı-sapma koruması algılanmaz. Aşırı-Yük Uyarı Değeri 5 ~ 100 % 50 Hemen Saklı Alarm temizleme giriş ayarı 0 ~ 3 0 Hemen Ana devre güç kaybı algılama 100 ~ ms 100 Hemen zamanı Ana devre güç kaybı durumu varsa,kayıp zaman algılama kurulur.bu değer 2000 olduğunda,ana güç kaybı alagılama etkisiz olur. Saklı Saklı PA537 Harici rejeneratif direncin değeri 5 ~ 200 Ohm 30 Power-on again PA538 Harici rejeneratif direncin kapasitesi 20 ~ 3000 Watt 60 Power-on again 136

136 Parametre No. İsim Ayar Aralığı Birim Fabrika Ayarları Etki zamanı Referans PA539 PA540 PA541 PA542 PA543 PA544 PA600 Saklı Saklı Saklı Saklı Saklı Saklı Ayarlama Tipi Switch 1 h.0000 ~ 03F6 h.0220 Power-on again Dgt 3 Dgt 2 Dgt 1 Dgt 0 Gerçek zamanlı otomatik ayarlama modu Gerçek zamanlı otomatik ayarlama modu pasif Gerçek zamanlı otomatik ayarlama modu aktif Gerçek zamanlı otomatik ayarlamada tahmini atalet Değerin artması,tahmini hızı hızlandırır fakat doğruluk düşebilir. Gerçek zamanlı otomatik ayarlamada tahmini hız Değişiklik yok.yük karakteristik tahmini durdu. Az değişim.yük karakteristiğinin değişimine göre,dakika komutu cevap için kullanılır. Yavaş değişim.yük karakteristiğinin değişimine göre,saniye komut cevap için kullanılır. Büyük değişim.yük karakteristiğinin değişimine göre,en hızlı cevap uygulanır. Saklı PA601 Saklı 0000 ~ PA602 Saklı 0000 ~ PA603 Ayarlama Tipi Switch 4 Dgt 3 Dgt 2 Dgt 1 Dgt 0 b.0000 ~ 1111 b.0010 Hemen Offline atalet algılama yükseltmesi Atalet oranı atalet algılanmasından sonra PA118 ile otomatik olarak güncellenir. Atalet oranı güncellenmez.elle güncelleyiniz. Otomatik Ayarlamada Atalet Seçimi Pr SOtomatik ayarlama modunda farzedilen atalet değeri Otomatik ayarlama modunda PA118 kullanarak manuel olarak ayarlama Saklı Saklı PA604 Saklı 0000 ~ PA605 Saklı 0000 ~ Atalet istikrar kriteri 0~100 2 Hemen PA606 Farzedilen atalet değeri PA606 değerinden az olursa,bu kesin bir zaman periyodunda sürer. PA608 Saklı 0 ~ 100 1% 0 PA609 Saklı 0 ~ ms 100 Bandgenişliği 1 ~ 1000 Hz 40 Hemen PA610 Otomatik modda,değerin artması,daha hızlı cevap ve daha fazla sertliğe neden olur fakat,titreşime neden olabilir. 137
 pozisyon seçer ve harici IO sinyal(trigger) aksyionu trig eder.")
137 Parametre Fabrika İsim Ayar Aralığı Birim No. Ayarları Etki zamanı PA611 Saklı PA612 Saklı 0 ~ 9 0 PA613 Saklı 0 ~ ms 10 PA614 Saklı PA615 Saklı PA700 Dahili pozisyon modu switch 1 d.0000 ~ 7702 d.1002 Hemen Dgt 3 Dgt 2 Dgt 1 Dgt 0 Referans Pozisyon Harici IO sinyal (POS) pozisyon seçer ve harici IO sinyal(trigger) aksyionu trig eder. Harici IO sinyal(trigger) aksiyonu trig eder ve pozisyon bir cycle da çalışır. Zamanlanmış dahili operasyon External Pozisyon işlem modu Gain pozisyonu Mutlak pozisyon Dairesel işlem pozisyon başlama noktası Pozisyon başlama zamanı seçimi PA701 PA702 PA703 PA704 PA705 PA706 PA707 PA708 PA709 PA710 PA711 PA712 PA713 PA714 PA715 Dahili pozisyon 0 high-order Dahili pozisyon 0 low-order Dahili pozisyon 1 high-order Dahili pozisyon 1 low-order Dahili pozisyon 2 high-order Dahili pozisyon 2 low-order Dahili pozisyon 3 high-order Dahili pozisyon 3 low-order Dahili pozisyon 4 high-order Dahili pozisyon4 low-order Dahili pozisyon 5 high-order Dahili pozisyon 5 low-order Dahili pozisyon 6 high-order Dahili pozisyon 6 low-order Dahili pozisyon 7 high-order Dairesel işlem pozisyon bitme noktası Pozisyon bitme noktası seçimi ~ 9999 turn 1 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 2 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 1 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 2 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 1 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 2 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 1 Hemen ~ 9999 pulse 0 Hemen ~ 9999 turn 2 Hemen 138
İÇİNDEKİLER ASD-B2 Serisi Sürücü Konnektör ve Terminal Bağlantıları
 İÇİNDEKİLER 1- ASD-A2 Serisi Sürücüler ve Motorlar 1.1-Temel Bağlantılar 1.1.1- ASD-A2 Serisi Motor Sürücü Bağlantısı 1.1.2- ASD-A2 Serisi Encoder Sürücü Bağlantısı 1.2-Ayrıntılı Bağlantılar 1.2-1. Çevre
İÇİNDEKİLER 1- ASD-A2 Serisi Sürücüler ve Motorlar 1.1-Temel Bağlantılar 1.1.1- ASD-A2 Serisi Motor Sürücü Bağlantısı 1.1.2- ASD-A2 Serisi Encoder Sürücü Bağlantısı 1.2-Ayrıntılı Bağlantılar 1.2-1. Çevre
Unidrive M200, M201 (Boy 1-4) Hızlı Başlangıç Kılavuzu
 Hızlı Başlangıç Kılavuzu") Bu kılavuzun amacı bir motoru çalıştırmak üzere bir sürücünün kurulması için gerekli temel bilgileri sunmaktır. Lütfen www.controltechniques.com/userguides veya www.leroy-somer.com/manuals adresinden indirebileceğiniz
Bu kılavuzun amacı bir motoru çalıştırmak üzere bir sürücünün kurulması için gerekli temel bilgileri sunmaktır. Lütfen www.controltechniques.com/userguides veya www.leroy-somer.com/manuals adresinden indirebileceğiniz
FRENIC MEGA ÖZET KULLANIM KLAVUZU
 FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 - X7 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 - Y4
FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 - X7 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 - Y4
FRENIC MEGA ÖZET KULLANIM KLAVUZU
 FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
FRENIC MULTİ ÖZET KULLANIM KLAVUZU
 FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
L300P GÜÇ BAĞLANTISI BAĞLANTI TERMİNALLERİ
 L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
Unidrive M400 (Boy 1 ila 4) Hızlı Başlangıç Kılavuzu
 Hızlı Başlangıç Kılavuzu") Bu kılavuzun amacı bir motoru çalıştırmak üzere bir sürücünün kurulması için gerekli temel bilgileri sunmaktır. Daha ayrıntılı kurulum bilgileri için lütfen www.controltechniques.com/userguides veya www.leroy-somer.com/manuals
Bu kılavuzun amacı bir motoru çalıştırmak üzere bir sürücünün kurulması için gerekli temel bilgileri sunmaktır. Daha ayrıntılı kurulum bilgileri için lütfen www.controltechniques.com/userguides veya www.leroy-somer.com/manuals
FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU
 FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU KONTEK OTOMASYON A.Ş. BEYİT SOK. NO:27 YUKARI DUDULLU ÜMRANİYE / İSTANBUL 0216 466 47 00 (T) 0216 466 21 20 (F) www.kontekotomasyon.com.tr Sayfa 1 / 7 TUŞ FONKSİYONLARI
FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU KONTEK OTOMASYON A.Ş. BEYİT SOK. NO:27 YUKARI DUDULLU ÜMRANİYE / İSTANBUL 0216 466 47 00 (T) 0216 466 21 20 (F) www.kontekotomasyon.com.tr Sayfa 1 / 7 TUŞ FONKSİYONLARI
TECO N3 SERİSİ HIZ KONTROL CİHAZLARI
 1/55 TECO N3 SERİSİ HIZ 230V 1FAZ 230V 3FAZ 460V 3FAZ 0.4 2.2 KW 0.4 30 KW 0.75 55 KW 2/55 PARÇA NUMARASI TANIMLAMALARI 3/55 TEMEL ÖZELLİKLER 1 FAZ 200-240V MODEL N3-2xx-SC/SCF P5 01 03 Güç (HP) 0.5 1
1/55 TECO N3 SERİSİ HIZ 230V 1FAZ 230V 3FAZ 460V 3FAZ 0.4 2.2 KW 0.4 30 KW 0.75 55 KW 2/55 PARÇA NUMARASI TANIMLAMALARI 3/55 TEMEL ÖZELLİKLER 1 FAZ 200-240V MODEL N3-2xx-SC/SCF P5 01 03 Güç (HP) 0.5 1
DKG-175 TRANSFER KONTROL ÜNİTESİ (DC BESLEME GEREKTİRMEYEN)
") DKG-175 TRANSFER KONTROL ÜNİTESİ (DC BESLEME GEREKTİRMEYEN) TANITIM Datakom DKG-175 DIN ray montajlı ve DC besleme gerektirmeyen bir transfer kontrol cihazıdır. Bu özelliğiyle transfer panolarına akü beslemesi
DKG-175 TRANSFER KONTROL ÜNİTESİ (DC BESLEME GEREKTİRMEYEN) TANITIM Datakom DKG-175 DIN ray montajlı ve DC besleme gerektirmeyen bir transfer kontrol cihazıdır. Bu özelliğiyle transfer panolarına akü beslemesi
0 Giriş kontağı ile Servo On 1 Giriş kontağı aktif değil Powerda Servo On
 PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 Cn002.2 H0*00 Cn002.3 H*000 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol
PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 Cn002.2 H0*00 Cn002.3 H*000 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol
TEKNİK ÖZELLİKLER. Giriş Beslemesi. Giriş besleme voltajı. Motor Çıkışı. Motor gerilimi. Aşırı yük ve kısa devre korumalı.
 1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
SK 2400 On-Off Seviye Kontrolörü Montaj ve Kullanım Kitapçığı
 SK 2400 On-Off Seviye Kontrolörü Montaj ve Kullanım Kitapçığı SK 2400 MKK v10.02-tr 1 İÇİNDEKİLER 1. ÖNEMLİ NOTLAR... 3 2. TANIMLAMA... 4 3. TEKNİK ÖZELLİKLER... 5 4. MONTAJ ve KABLOLAMA... 5 4.1. Montaj...
SK 2400 On-Off Seviye Kontrolörü Montaj ve Kullanım Kitapçığı SK 2400 MKK v10.02-tr 1 İÇİNDEKİLER 1. ÖNEMLİ NOTLAR... 3 2. TANIMLAMA... 4 3. TEKNİK ÖZELLİKLER... 5 4. MONTAJ ve KABLOLAMA... 5 4.1. Montaj...
CHF100A KOLAY DEVREYE ALMA KİTAPÇIĞI
 CHF100A KOLAY DEVREYE ALMA KİTAPÇIĞI LED PANEL LCD PANEL PANEL ÜZERİNDEKİ BUTONLAR VE AÇIKLAMALARI GÜÇ VE KONTROL TERMİNALLERİ BAĞLANTI ŞEMASI Hız kontrol cihazları, panel üzerinden start/stop ve panel
CHF100A KOLAY DEVREYE ALMA KİTAPÇIĞI LED PANEL LCD PANEL PANEL ÜZERİNDEKİ BUTONLAR VE AÇIKLAMALARI GÜÇ VE KONTROL TERMİNALLERİ BAĞLANTI ŞEMASI Hız kontrol cihazları, panel üzerinden start/stop ve panel
Kullanım Uygulamaları Ön Görünüş. Dijital Ekran Mode Butonu Programlama Tuşu Sıcaklık Değiştirme tuşu ( - ) Sıcaklık Değiştirme tuşu ( +)
 Sıcaklık Değiştirme tuşu ( +)") Kullanım Uygulamaları Ön Görünüş Dijital Ekran Mode Butonu Programlama Tuşu Sıcaklık Değiştirme tuşu ( - ) Sıcaklık Değiştirme tuşu ( +) Dijital Ekran Üzerindeki Bilgiler 1.Manuel Çalışma 2.Çalışma Fonksiyonları
Kullanım Uygulamaları Ön Görünüş Dijital Ekran Mode Butonu Programlama Tuşu Sıcaklık Değiştirme tuşu ( - ) Sıcaklık Değiştirme tuşu ( +) Dijital Ekran Üzerindeki Bilgiler 1.Manuel Çalışma 2.Çalışma Fonksiyonları
yabancı cisim olup olmadığını kontrol edin. Sıcaklık algılama devresi arızalanmış olabilir.
 ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
DC baradaki voltaj çok yükselmiş olabilir. Çıkışlarda bir kısadevre olabilir. bağlantıyı kontrol ediniz. Enkoder hatası olabilir.
 ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama süresi çok düşükse yükseltiniz. Çıkışlarda
ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama süresi çok düşükse yükseltiniz. Çıkışlarda
U-V-W çıkışları ile motor arası bağlantıyı kontrol ediniz. Enkoderi, kablosunu veya bağlantısını kontrol ediniz. Akım algılayıcıyı değiştiriniz.
 ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
B603 - B603B SERİSİ FREKANS KONTROLLÜ SÜRÜCÜLER KULLANMA KILAVUZU
 B603 - B603B SERİSİ FREKNS KONTROLLÜ SÜRÜCÜLER KULLNM KILUZU İÇERİK Sayfa BĞLNTI E KULLNIM BİLGİLERİ... 1 1.0 Elektriksel bağlantılar... 1 1.1 na terminal... 1 1.2 Kontrol devresi bağlantıları... 1 2.0
B603 - B603B SERİSİ FREKNS KONTROLLÜ SÜRÜCÜLER KULLNM KILUZU İÇERİK Sayfa BĞLNTI E KULLNIM BİLGİLERİ... 1 1.0 Elektriksel bağlantılar... 1 1.1 na terminal... 1 1.2 Kontrol devresi bağlantıları... 1 2.0
Senkronizasyon Opsiyon Modülü. SV-IS7 Serisi. Kullanıcı Manueli
 Senkronizasyon Opsiyon Modülü SV-IS7 Serisi Kullanıcı Manueli Ürün Standartları Madde Nasıl Montaj Yapılır Master Enkoder Girişi Slave Enkoder Girişi Master Enkoder Geridönüş Çıkışı Terminal Bloğu Çıkışı
Senkronizasyon Opsiyon Modülü SV-IS7 Serisi Kullanıcı Manueli Ürün Standartları Madde Nasıl Montaj Yapılır Master Enkoder Girişi Slave Enkoder Girişi Master Enkoder Geridönüş Çıkışı Terminal Bloğu Çıkışı
İÇİNDEKİLER ÖZELLİKLER. 3-4 KONTROL PANELİ HARİCİ KONTROL ÜNİTESİ BAĞLANTILAR VE HABERLEŞMELER 23-24
 ULD-25AL ÇAP ÖLÇER 2016 İÇİNDEKİLER İÇİNDEKİLER ÖZELLİKLER. 3-4 KONTROL PANELİ... 5-13 HARİCİ KONTROL ÜNİTESİ... 14-22 BAĞLANTILAR VE HABERLEŞMELER 23-24 2 ÖZELLİKLER ÖZELLİKLER MODEL : U25AL ÖLÇÜM YÖNTEMİ.:
ULD-25AL ÇAP ÖLÇER 2016 İÇİNDEKİLER İÇİNDEKİLER ÖZELLİKLER. 3-4 KONTROL PANELİ... 5-13 HARİCİ KONTROL ÜNİTESİ... 14-22 BAĞLANTILAR VE HABERLEŞMELER 23-24 2 ÖZELLİKLER ÖZELLİKLER MODEL : U25AL ÖLÇÜM YÖNTEMİ.:
TÜRKÇE TANITIM, KURULUM VE KULLANMA KILAVUZU
 BLW-80PB BEAM DEDEKTÖR TÜRKÇE TANITIM, KURULUM VE KULLANMA KILAVUZU UYARI! Kurulum işlemine geçmeden önce kullanım kılavuzunu dikkatlice okuyunuz. Bu kullanma kılavuzunun içeriği, fonksiyonlardaki değişiklikler
BLW-80PB BEAM DEDEKTÖR TÜRKÇE TANITIM, KURULUM VE KULLANMA KILAVUZU UYARI! Kurulum işlemine geçmeden önce kullanım kılavuzunu dikkatlice okuyunuz. Bu kullanma kılavuzunun içeriği, fonksiyonlardaki değişiklikler
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ :
 SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
ACD BİLGİ İŞLEM ACD KABLOSUZ VERİ TOPLAMA SİSTEMLERİ URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ. URT-V2 Terminallerinin
 ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
UPSLIFT ASANSÖR KURTARMA GÜÇ MODÜLÜ KULLANIM KILAVUZU
 UPSLIFT ASANSÖR KURTARMA GÜÇ MODÜLÜ KULLANIM KILAVUZU Sürüm: 1.0 BÖLÜM 1-UYARILAR... 1 BÖLÜM 2-TEKNİK ÖZELLİKLER... 2 2.1 ELEKTRİKSEL ÖZELLİKLER... 2 2.2 MEKANİK ÖZELLİKLER... 3 BÖLÜM 3-UPSLIFT İÇİN UYGUN
UPSLIFT ASANSÖR KURTARMA GÜÇ MODÜLÜ KULLANIM KILAVUZU Sürüm: 1.0 BÖLÜM 1-UYARILAR... 1 BÖLÜM 2-TEKNİK ÖZELLİKLER... 2 2.1 ELEKTRİKSEL ÖZELLİKLER... 2 2.2 MEKANİK ÖZELLİKLER... 3 BÖLÜM 3-UPSLIFT İÇİN UYGUN
TURKÇE KULLANIM KİTABI
 TURKÇE KULLANIM KİTABI İlk Kullanım; 1.1 PAKET İÇERİĞİ 1- Taşıma Çantası 2-2 adet 2mt yüksek-gerilim dayanıklı uçlu bağlantı kablosu ( bir kırmızı ve bir mavi) 3-1 adet yüksek-gerilim dayanıklı uçlu 2mt
TURKÇE KULLANIM KİTABI İlk Kullanım; 1.1 PAKET İÇERİĞİ 1- Taşıma Çantası 2-2 adet 2mt yüksek-gerilim dayanıklı uçlu bağlantı kablosu ( bir kırmızı ve bir mavi) 3-1 adet yüksek-gerilim dayanıklı uçlu 2mt
TAM OTOMATİK KAPI KARTI
 İBRAHİMOĞLU MÜHENDİSLİK TAM OTOMATİK KAPI KARTI KULLANMA KILAVUZU KAPI KARTINA GENEL BAKIŞ SOĞUTUCULARI İLE BİRLİKTE MOTOR SÜRME TRANSİSTÖRLERİ 15V AKÜ BESLEME SİGORTASI AC GİRİŞ BESLEME SİGORTASI Kapı
İBRAHİMOĞLU MÜHENDİSLİK TAM OTOMATİK KAPI KARTI KULLANMA KILAVUZU KAPI KARTINA GENEL BAKIŞ SOĞUTUCULARI İLE BİRLİKTE MOTOR SÜRME TRANSİSTÖRLERİ 15V AKÜ BESLEME SİGORTASI AC GİRİŞ BESLEME SİGORTASI Kapı
Bağımsız Geçiş Kontrol Cihazı
 Bağımsız Geçiş Kontrol Cihazı Kullanım Kılavuzu Kullanmaya başlamadan önce Kullanım Kılavuzunu lütfen dikkatlice okuyunuz. 1. Paket İçeriği; Adı Miktar Notlar Geçiş kontrol cihazı 1 Kullanım kılavuzu 1
Bağımsız Geçiş Kontrol Cihazı Kullanım Kılavuzu Kullanmaya başlamadan önce Kullanım Kılavuzunu lütfen dikkatlice okuyunuz. 1. Paket İçeriği; Adı Miktar Notlar Geçiş kontrol cihazı 1 Kullanım kılavuzu 1
WAT Endüstriyel Sürücüler
 WAT Endüstriyel Sürücüler WAT Endüstriyel Sürücüler İçindekiler Yüksek verimli WAT motorlarla entegre sistem çözümleri 4-5 WF 80 in özellikleri 6-7 WF 80 in pompa uygulamalarına özel fonksiyonları 8-9
WAT Endüstriyel Sürücüler WAT Endüstriyel Sürücüler İçindekiler Yüksek verimli WAT motorlarla entegre sistem çözümleri 4-5 WF 80 in özellikleri 6-7 WF 80 in pompa uygulamalarına özel fonksiyonları 8-9
TECO N3 SERĐSĐ HIZ KONTROL CĐHAZI HIZLI BAŞLAT DÖKÜMANI. ADIM 1: Sürücü beslemesini ve motor uçlarını bağlama
 1/6 TECO N3 SERĐSĐ HIZLI BAŞLAT DÖKÜMANI ADIM 1 Sürücü beslemesini ve motor uçlarını bağlama Monofaze N3 serisinde 220 volt beslemesi L1 (L) ve L3 (N) girişlerine bağlanarak cihaza enerji verilir. Aşağıdaki
1/6 TECO N3 SERĐSĐ HIZLI BAŞLAT DÖKÜMANI ADIM 1 Sürücü beslemesini ve motor uçlarını bağlama Monofaze N3 serisinde 220 volt beslemesi L1 (L) ve L3 (N) girişlerine bağlanarak cihaza enerji verilir. Aşağıdaki
CW ve CCW yönü için Hız preset devri (rpm)
") PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol Switch 5 Pozisyon / Tork Kontrol
PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol Switch 5 Pozisyon / Tork Kontrol
5-14 KURULUM AYARLARI CALIŞMA FONKSİYONLARI MEKANÝK KURULUM ARIZA DURUMLARI GÜVENLÝK UYARILARI TEKNÝK ÖZELLÝKLER
 3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
3 4 5-14 2 KURULUM AYARLARI 15-16 CALIŞMA FONKSİYONLARI 17-20 MEKANÝK KURULUM 21-22 ARIZA DURUMLARI 23 GÜVENLÝK UYARILARI 24 TEKNÝK ÖZELLÝKLER 25 3 07 08 06 10 11 09 Perde Radar ( Opsiyonel) 4 07 Kayış
FRENIC Multi (E1S) ile Asansör Uygulamaları için Hızlı Devreye Alma Kılavuzu
 ile Asansör Uygulamaları için Hızlı Devreye Alma Kılavuzu") FRENIC Multi (E1S) ile Asansör Uygulamaları için Hızlı Devreye Alma Kılavuzu Tarih _ Versiyon 10/05/06_1d İçindekiler Giriş... 3 Bölüm 1 Enerji Terminalleri... 4 Kontrol Terminalleri... 5 Bağlantı Örneği...
FRENIC Multi (E1S) ile Asansör Uygulamaları için Hızlı Devreye Alma Kılavuzu Tarih _ Versiyon 10/05/06_1d İçindekiler Giriş... 3 Bölüm 1 Enerji Terminalleri... 4 Kontrol Terminalleri... 5 Bağlantı Örneği...
Kontrol modu. Fabrika Ayarı
 PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 Cn002.2 H0*00 Cn002.3 H*000 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol
PARAMETRE Cn001 Cn002.0 H000* Cn002.1 H00*0 Cn002.2 H0*00 Cn002.3 H*000 ĐSĐM & FONKSĐYON 0 Tork kontrol 1 Hız Kontrol 2 Pozisyon Kontrol (External) 3 Pozisyon / Hız Kontrol Switch 4 Hız / Tork Kontrol
E5_C Serisi Hızlı Başlangıç Kılavuzu
 E5_C Serisi Hızlı Başlangıç Kılavuzu İÇİNDEKİLER 1. Giriş 2. Sensör Bağlantı Şekilleri 3. Sensör Tipi Seçimi 4. Kontrol Metodunun PID Olarak Ayarlanması 5. Auto-Tuning Yapılması 6. Alarm Tipinin Değiştirilmesi
E5_C Serisi Hızlı Başlangıç Kılavuzu İÇİNDEKİLER 1. Giriş 2. Sensör Bağlantı Şekilleri 3. Sensör Tipi Seçimi 4. Kontrol Metodunun PID Olarak Ayarlanması 5. Auto-Tuning Yapılması 6. Alarm Tipinin Değiştirilmesi
TES Dijital Toprak direnci ölçer TES-1700 KULLANMA KLAVUZU
 TES Dijital Toprak direnci ölçer TES-1700 KULLANMA KLAVUZU TES ELECTRICAL ELECTRONIC CORP ı. GÜVENLİK BİLGİSİ Ölçü aleti ile servis ya da çalışma yapmadan önce aşağıdaki güvenlik bilgilerini dikkatle okuyunuz.
TES Dijital Toprak direnci ölçer TES-1700 KULLANMA KLAVUZU TES ELECTRICAL ELECTRONIC CORP ı. GÜVENLİK BİLGİSİ Ölçü aleti ile servis ya da çalışma yapmadan önce aşağıdaki güvenlik bilgilerini dikkatle okuyunuz.
-Örnek Giriş Şeması-
 ASDA-A SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER SON = 01 (SERVO ON) -Örnek Giriş Şeması- Servo sürücünün dijital girişlerinden (P2-10 P2-17) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
ASDA-A SERĐSĐ SERVOLARDA DĐJĐTAL GĐRĐŞLER SON = 01 (SERVO ON) -Örnek Giriş Şeması- Servo sürücünün dijital girişlerinden (P2-10 P2-17) birine (101) değerini girerek bu dijital girişi aktif ettiğimizde
2 Kablolu Villa Zil Paneli (Kart Okuyuculu)
") 2 Kablolu Villa Zil Paneli (Kart Okuyuculu) 2K-61 Kullanım Kılavuzu RF CARD 2K-61 Villa Zil Paneli 1.Bölümler ve Fonksiyonları Balık Gözü Kamera Hoparlör Gece Görüş Ledi RF CARD Kart Okutma Penceresi 182
2 Kablolu Villa Zil Paneli (Kart Okuyuculu) 2K-61 Kullanım Kılavuzu RF CARD 2K-61 Villa Zil Paneli 1.Bölümler ve Fonksiyonları Balık Gözü Kamera Hoparlör Gece Görüş Ledi RF CARD Kart Okutma Penceresi 182
KAÇAK AKIM RÖLESİ. www.ulusanelektrik.com.tr. Sayfa 1
 DELAB TM-18C KAÇAK AKIM RÖLESİ İÇERİK GENEL / BUTON FONKSİYONLARI.2 PARAMETRE AYARLARI...2 PARAMETRE AÇIKLAMALARI 3 KAÇAK AKIM AYARLARI...3 AÇMA SÜRESİ AYARLARI.3 AŞIRI AKIM AYARLARI...4 ÇALIŞMA SÜRESİ..4
DELAB TM-18C KAÇAK AKIM RÖLESİ İÇERİK GENEL / BUTON FONKSİYONLARI.2 PARAMETRE AYARLARI...2 PARAMETRE AÇIKLAMALARI 3 KAÇAK AKIM AYARLARI...3 AÇMA SÜRESİ AYARLARI.3 AŞIRI AKIM AYARLARI...4 ÇALIŞMA SÜRESİ..4
MultiPlus-II 48/3000/ V (önceki adıyla MultiGrid-II)
") 28-05-2018 MultiPlus-II 48/3000/35-32 230 V (önceki adıyla MultiGrid-II) MultiGrid 48/3000/35-50 230 V ile karşılaştırma ve kurulum önerileri 1. Teknik Özellikler MultiPlus-II 48/3000/35 230V MultiGrid
28-05-2018 MultiPlus-II 48/3000/35-32 230 V (önceki adıyla MultiGrid-II) MultiGrid 48/3000/35-50 230 V ile karşılaştırma ve kurulum önerileri 1. Teknik Özellikler MultiPlus-II 48/3000/35 230V MultiGrid
Doküman No: KK-PS R2-TR CODESEC PS120 GÜÇ KAYNAĞI ÜNİTESİ KURULUM VE KULLANICI KILAVUZU. Doc: KK-PS R2-TR
 Doküman No: KK-PS120-0117-R2-TR CODESEC PS120 GÜÇ KAYNAĞI ÜNİTESİ KURULUM VE KULLANICI KILAVUZU Doc: KK-PS120-0117-R2-TR DİZİN TEKNİK ÖZELLİKLER... 3 1. GENEL AÇIKLAMA... 4 2. TANIMLAR... 4 3. KURULUM,
Doküman No: KK-PS120-0117-R2-TR CODESEC PS120 GÜÇ KAYNAĞI ÜNİTESİ KURULUM VE KULLANICI KILAVUZU Doc: KK-PS120-0117-R2-TR DİZİN TEKNİK ÖZELLİKLER... 3 1. GENEL AÇIKLAMA... 4 2. TANIMLAR... 4 3. KURULUM,
Kompakt Jeneratör Kontrol Ünitesi CGC 400 Montaj Bağlantı Klemensleri Bağlantı Haberleşme Bağlantısı Ünitenin Boyutları ve Kesiti
 KURULUM TALİMATLARI Kompakt Jeneratör Kontrol Ünitesi CGC 400 Montaj Bağlantı Klemensleri Bağlantı Haberleşme Bağlantısı Ünitenin Boyutları ve Kesiti DEIF A/S Frisenborgvej 33 DK-7800 Skive Tel: +45 9614
KURULUM TALİMATLARI Kompakt Jeneratör Kontrol Ünitesi CGC 400 Montaj Bağlantı Klemensleri Bağlantı Haberleşme Bağlantısı Ünitenin Boyutları ve Kesiti DEIF A/S Frisenborgvej 33 DK-7800 Skive Tel: +45 9614
ART S602W Standalone Kart Okuyucu
 ART S602W Standalone Kart Okuyucu ART S602W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
ART S602W Standalone Kart Okuyucu ART S602W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
Ýki Setli, Ýki Çýkýþlý, Çok Fonksiyonlu Pozisyon Ýndikatörü
 Pozisyon Ýndikatörü TCS37-200.PSI TCS37-200 Timer&Counter&Speed Ýki Setli, Ýki Çýkýþlý, Çok Fonksiyonlu Pozisyon Ýndikatörü 6 dijit LED Display (Yeþil veya Kýrmýzý), 8mm dijit boyu Mekanik reset deðeri
Pozisyon Ýndikatörü TCS37-200.PSI TCS37-200 Timer&Counter&Speed Ýki Setli, Ýki Çýkýþlý, Çok Fonksiyonlu Pozisyon Ýndikatörü 6 dijit LED Display (Yeþil veya Kýrmýzý), 8mm dijit boyu Mekanik reset deðeri
Parametre açıklamaları
 Parametre fonksiyon açıklamaları 5.1 Sembol tanımlama ---- sürücü çalışırken parametre değiştirilemez. ---- sürücü çalışırken parametre değiştirilebilir. * ---- yalnızca okunabilir parametreler, değiştirilemez.
Parametre fonksiyon açıklamaları 5.1 Sembol tanımlama ---- sürücü çalışırken parametre değiştirilemez. ---- sürücü çalışırken parametre değiştirilebilir. * ---- yalnızca okunabilir parametreler, değiştirilemez.
Servo sürücü arızası(devre arızası). Sürücüyü yeni bir sürücü ile değiştirin.
. Sürücüyü yeni bir sürücü ile değiştirin.") Err 11.0 Kontrol güç kaynağının dönüştürücü bölümündeki faz ve nötrün arasındaki voltaj belirlenen değerden aşağıda. 100V versiyon : ~70VDC (~50VAC) 200V versiyon : ~145VDC (~100VAC) 400V versiyon : ~15VDC
Err 11.0 Kontrol güç kaynağının dönüştürücü bölümündeki faz ve nötrün arasındaki voltaj belirlenen değerden aşağıda. 100V versiyon : ~70VDC (~50VAC) 200V versiyon : ~145VDC (~100VAC) 400V versiyon : ~15VDC
İçerik. Ürün no.: CML720i-R A/CN-M12-EX Işık perdesi alıcı
 Ürün no.: 50126349 CML720i-R10-460.A/CN-M12-EX Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50126349 CML720i-R10-460.A/CN-M12-EX Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Sinamics G120C Genel Tanımlar & Parametre Açıklamaları
 Sinamics G120C Genel Tanımlar & Parametre Açıklamaları Siemens Endüstri Sektörü Hareket Kontrol Sistemleri I DT MC Endüstri Sektörü / Hareket Kontrol Sistemleri Ba lıklar * G120C Güç ve Kontrol Terminal
Sinamics G120C Genel Tanımlar & Parametre Açıklamaları Siemens Endüstri Sektörü Hareket Kontrol Sistemleri I DT MC Endüstri Sektörü / Hareket Kontrol Sistemleri Ba lıklar * G120C Güç ve Kontrol Terminal
AC Servo Kullanım Kılavuzu. L7S Serisi Ver. 2.0
 AC Servo Kullanım Kılavuzu L7S Serisi Ver. 2.0 İçindekiler İçindekiler 1. Ürün Bileşenleri ve Sinyalleri...... 1-1... 1.2 Sistem Yapılandırma...... 1-1 1.2.2 CN1 Konektör Bağlantı Şeması...... 1-1 1.2.3
AC Servo Kullanım Kılavuzu L7S Serisi Ver. 2.0 İçindekiler İçindekiler 1. Ürün Bileşenleri ve Sinyalleri...... 1-1... 1.2 Sistem Yapılandırma...... 1-1 1.2.2 CN1 Konektör Bağlantı Şeması...... 1-1 1.2.3
TÜRKÇE TANITIM, KURULUM VE KULLANMA KILAVUZU
 BLW-140PB BEAM DEDEKTÖR TÜRKÇE TANITIM, KURULUM VE KULLANMA KILAVUZU UYARI! Kurulum işlemine geçmeden önce kullanım kılavuzunu dikkatlice okuyunuz. Bu kullanma kılavuzunun içeriği, fonksiyonlardaki değişiklikler
BLW-140PB BEAM DEDEKTÖR TÜRKÇE TANITIM, KURULUM VE KULLANMA KILAVUZU UYARI! Kurulum işlemine geçmeden önce kullanım kılavuzunu dikkatlice okuyunuz. Bu kullanma kılavuzunun içeriği, fonksiyonlardaki değişiklikler
SmartStep 2 servo sürücü
 R7D-BP@, R88D-GP08H SmartStep 2 servo sürücü Sürücü kolaylığında bir adım ileri Çevrimiçi Otomatik ayarlama ve Kolay kurulum Ultra kompakt boyut. Kapladığı yer sadece SmartStep serisinin % 48'idir İki
R7D-BP@, R88D-GP08H SmartStep 2 servo sürücü Sürücü kolaylığında bir adım ileri Çevrimiçi Otomatik ayarlama ve Kolay kurulum Ultra kompakt boyut. Kapladığı yer sadece SmartStep serisinin % 48'idir İki
Strike 5.50 R Proximity Kart Okuyucu Kullanım Kılavuzu
 Strike 5.50 R Proximity Kart Okuyucu Kullanım Kılavuzu Bu kılavuz Strike 5,50 R kullanım ve bilgisayar bağlantısı ile cihaz tanımlamalarına yönelik doğru çalışma alışkanlıkları konusunda bilgiler vermektedir.
Strike 5.50 R Proximity Kart Okuyucu Kullanım Kılavuzu Bu kılavuz Strike 5,50 R kullanım ve bilgisayar bağlantısı ile cihaz tanımlamalarına yönelik doğru çalışma alışkanlıkları konusunda bilgiler vermektedir.
İçerik. Ürün no.: CML720i-R A/D3-M12 Işık perdesi alıcı
 Ürün no.: 50123447 CML720i-R05-640.A/D3-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50123447 CML720i-R05-640.A/D3-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
İçerik. Ürün no.: CML720i-R A/CN-M12 Işık perdesi alıcı
 Ürün no.: 50119610 CML720i-R05-400.A/CN-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50119610 CML720i-R05-400.A/CN-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
BKV 5400 Yüzey Blöf Kontrol Vanası Montaj ve Kullanım Kitapçığı
 BKV 5400 Yüzey Blöf Kontrol Vanası Montaj ve Kullanım Kitapçığı BKV 5400 MKK v10.01-tr 1 İÇİNDEKİLER 1. ÖNEMLİ NOTLAR... 3 2. TANIMLAMA... 3 3. TEKNİK ÖZELLİKLER... 4 3.1. BKA 5400 Yüzey Blöf Kontrol Vanası
BKV 5400 Yüzey Blöf Kontrol Vanası Montaj ve Kullanım Kitapçığı BKV 5400 MKK v10.01-tr 1 İÇİNDEKİLER 1. ÖNEMLİ NOTLAR... 3 2. TANIMLAMA... 3 3. TEKNİK ÖZELLİKLER... 4 3.1. BKA 5400 Yüzey Blöf Kontrol Vanası
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
ABSOLUTE ROTARY ENKODER Tek Turlu Absolute Enkoder, Manyetik Ölçüm SAS Analog Çıkışlı SAS-S (ŞAFTLI) SAS- B (YARI HOLLOW ŞAFTLI) SAS-K (KOLLU) GENEL ÖZELLİKLER SAS serisi enkoderler absolute olarak çalışırlar.
TOSVERT VF-S11 PARAMETRE LİSTESİ
 TOSVERT VF-S11 PARAMETRE LİSTESİ 1.KULLANICI PARAMETRELERİ FC KONTROL PANEL ÇALIŞMA FREKANSI Hz LL-UL Arasında. 2.TEMEL PARAMETRELER AUH TARİH FONKSİYONU - En Son değişiklik yapılan 5 parametreyi gösterir
TOSVERT VF-S11 PARAMETRE LİSTESİ 1.KULLANICI PARAMETRELERİ FC KONTROL PANEL ÇALIŞMA FREKANSI Hz LL-UL Arasında. 2.TEMEL PARAMETRELER AUH TARİH FONKSİYONU - En Son değişiklik yapılan 5 parametreyi gösterir
KURULUM ve KULLANIM KILAVUZU
 ISITMA/SOĞUTMA OTOMASYON SİSTEMLERİ KURULUM ve KULLANIM KILAVUZU MODEL NO.: TH1149 TH1149SA TH1149SB TH1149RF TH1149MSA TH1149MSB DİKKAT : Cihazı kullanmadan önce bu kılavuzu okuyun ve daha sonra gerekli
ISITMA/SOĞUTMA OTOMASYON SİSTEMLERİ KURULUM ve KULLANIM KILAVUZU MODEL NO.: TH1149 TH1149SA TH1149SB TH1149RF TH1149MSA TH1149MSB DİKKAT : Cihazı kullanmadan önce bu kılavuzu okuyun ve daha sonra gerekli
4-1. Ön Kontrol Paneli
 4-1. Ön Kontrol Paneli 1 Açma/Kapama(ON/OFF) Düğmesi.! Fan motoru termostat kontrollü olduğu için sadece soğutma gerektiğinde çalışır.! Su soğutma ünitesi otomatik kontrollüdür, sadece gerektiğinde çalışır.
4-1. Ön Kontrol Paneli 1 Açma/Kapama(ON/OFF) Düğmesi.! Fan motoru termostat kontrollü olduğu için sadece soğutma gerektiğinde çalışır.! Su soğutma ünitesi otomatik kontrollüdür, sadece gerektiğinde çalışır.
TES Dijital Toprak direnci ölçer TES-1605 KULLANMA KLAVUZU
 TES Dijital Toprak direnci ölçer TES-1605 KULLANMA KLAVUZU TES ELECTRICAL ELECTRONIC CORP ı. GÜVENLİK BİLGİSİ Ölçü aleti ile servis ya da çalışma yapmadan önce aşağıdaki güvenlik bilgilerini dikkatle okuyunuz.
TES Dijital Toprak direnci ölçer TES-1605 KULLANMA KLAVUZU TES ELECTRICAL ELECTRONIC CORP ı. GÜVENLİK BİLGİSİ Ölçü aleti ile servis ya da çalışma yapmadan önce aşağıdaki güvenlik bilgilerini dikkatle okuyunuz.
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ART AC2 Standalone Kart Okuyucu
 ART AC2 Standalone Kart Okuyucu ART AC2 Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com pazarlama@artelektronik.com
ART AC2 Standalone Kart Okuyucu ART AC2 Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com pazarlama@artelektronik.com
Kullanım Klavuzu Titreşim Ölçer PCE-VT 2700S
 Kullanım Klavuzu Titreşim Ölçer PCE-VT 2700S Versiyon 1.1 Oluşturma Tarihi: 23/09/2016 İçindekiler 1 Güvenlik notları... 3 2 Özellikler... 3 3 Sistem açıklaması... 4 3.1 Yapıt... 4 3.2 Teslimat içeriği...
Kullanım Klavuzu Titreşim Ölçer PCE-VT 2700S Versiyon 1.1 Oluşturma Tarihi: 23/09/2016 İçindekiler 1 Güvenlik notları... 3 2 Özellikler... 3 3 Sistem açıklaması... 4 3.1 Yapıt... 4 3.2 Teslimat içeriği...
OTOMATİK TRANSFER ŞALTERLERİ
 OTOMATİK TASFE ŞALTELEİ Otomatik Transfer Şalterleri MAU Otomatik Transfer Şalterleri İçindekiler Genel Bilgi.... 71 Modüler Otomatik Transfer Şalteri (100A den 800A e kadar)... 73 İzleme & Kontrol...
OTOMATİK TASFE ŞALTELEİ Otomatik Transfer Şalterleri MAU Otomatik Transfer Şalterleri İçindekiler Genel Bilgi.... 71 Modüler Otomatik Transfer Şalteri (100A den 800A e kadar)... 73 İzleme & Kontrol...
İçindekiler. Teknik Özellikler 6. Parametre Tablosu 8. Kullanıcı Arabirimi 10. Montaj 16. Ürün Seçimi 20
 İçindekiler Teknik Özellikler 6 Parametre Tablosu 8 Kullanıcı Arabirimi 10 Montaj 16 Ürün Seçimi 20 Teknik Özellikler 6 Teknik Özellikler AC Besleme DC Besleme Giriş Voltajı 100 220 VAC ± %10 24 VDC ±
İçindekiler Teknik Özellikler 6 Parametre Tablosu 8 Kullanıcı Arabirimi 10 Montaj 16 Ürün Seçimi 20 Teknik Özellikler 6 Teknik Özellikler AC Besleme DC Besleme Giriş Voltajı 100 220 VAC ± %10 24 VDC ±
UltraView IP XP3 Gündüz/Gece Sabit Kamera Hızlı Başlangıç Kılavuzu
 UltraView IP XP3 Gündüz/Gece Sabit Kamera Hızlı Başlangıç Kılavuzu P/N 1070300-TR REV B ISS 17NOV10 Telif Hakkı 2010 UTC Fire & Security. Tüm hakları saklıdır. Ticari markalar ve patentler UltraView adı
UltraView IP XP3 Gündüz/Gece Sabit Kamera Hızlı Başlangıç Kılavuzu P/N 1070300-TR REV B ISS 17NOV10 Telif Hakkı 2010 UTC Fire & Security. Tüm hakları saklıdır. Ticari markalar ve patentler UltraView adı
ART S603W Standalone Kart Okuyucu
 ART S603W Standalone Kart Okuyucu ART S603W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
ART S603W Standalone Kart Okuyucu ART S603W Standalone kart okuyucuya ait genel bilgiler, montaj, kablolama, programlama bilgileri ve teknik özellikleri hakkında detaylı açıklama. www.artelektronik.com
(RELAY CONTROL) KRAMER KAPI KONTROL KARTI
 KRAMER KAPI KONTROL KARTI") SNS-155T (RELAY CONTROL) KRAMER KAPI KONTROL KARTI ( Encoder Girişli ) KULLANIM KILAVUZU 8 BİT CORE DEVİCE SWİTCH MOD POWER 16 A. RELAY OUT 12 Khz. PWM 1 CHANNEL ENCODER FEEDBACK Üretici Firma: SENSE Elektrik
SNS-155T (RELAY CONTROL) KRAMER KAPI KONTROL KARTI ( Encoder Girişli ) KULLANIM KILAVUZU 8 BİT CORE DEVİCE SWİTCH MOD POWER 16 A. RELAY OUT 12 Khz. PWM 1 CHANNEL ENCODER FEEDBACK Üretici Firma: SENSE Elektrik
Montaj kılavuzu. Oda termostatı EKRTWA
 1 1 2 2 60 mm/2.36 inch 87 mm/3.43 inch ±1.5 m ±60 inch >0.2 m >8 inch 3 34 mm/1.34 inch 125 mm/4.92 inch 3 İngilizce metin asıl talimattır. Diğer diller asıl talimatların çevirileridir. İçindekiler 1.
1 1 2 2 60 mm/2.36 inch 87 mm/3.43 inch ±1.5 m ±60 inch >0.2 m >8 inch 3 34 mm/1.34 inch 125 mm/4.92 inch 3 İngilizce metin asıl talimattır. Diğer diller asıl talimatların çevirileridir. İçindekiler 1.
Accurax G5 servo motorlar
 ADR R88M-K@, R88M-KH@ Accurax G5 servo motorlar Doğru hareket kontrolü için servo ailesi. 15 kw'ye kadar genişletilmiş güç aralığı. Standart ve yüksek ataletli servo motor modelleri Modele bağlı olarak
ADR R88M-K@, R88M-KH@ Accurax G5 servo motorlar Doğru hareket kontrolü için servo ailesi. 15 kw'ye kadar genişletilmiş güç aralığı. Standart ve yüksek ataletli servo motor modelleri Modele bağlı olarak
Serisi Basınç Sensörü Bilgi Dökümanı
 Serisi Basınç Sensörü Bilgi Dökümanı Delta DPA serisi basınç sensörlerini seçtiğiniz için teşekkürler. DPA yı kullanmadan önce bu bilgi dökümanını dikkatlice okuyunuz. İhtiyaç olduğunda kullanmak amacıyla
Serisi Basınç Sensörü Bilgi Dökümanı Delta DPA serisi basınç sensörlerini seçtiğiniz için teşekkürler. DPA yı kullanmadan önce bu bilgi dökümanını dikkatlice okuyunuz. İhtiyaç olduğunda kullanmak amacıyla
Model BLW-210PI
 Model BLW-210PI www.biges.com 444 09 18 Teknik özellikler Voltaj Sıcaklık Nem Kart Kapasitesi Genel PIN 1 DC 12V Özel PIN 1000 Frekans Okuma Mesafesi Sinyal Çıkışı Çıkış Butonu 1 Kapı Zili 1 Harici Okuyucu
Model BLW-210PI www.biges.com 444 09 18 Teknik özellikler Voltaj Sıcaklık Nem Kart Kapasitesi Genel PIN 1 DC 12V Özel PIN 1000 Frekans Okuma Mesafesi Sinyal Çıkışı Çıkış Butonu 1 Kapı Zili 1 Harici Okuyucu
2 Kablolu Villa Zil Paneli (Kart Okuyuculu)
") 2 Kablolu Villa Zil Paneli (Kart Okuyuculu) 2K-61 Kullanım Kılavuzu RF CARD 2K-61 Villa Zil Paneli 1.Bölümler ve Fonksiyonları Kamera RF CARD Kart Okutma Penceresi 182 mm Hoparlör Gece Görüş Ledi RF CARD
2 Kablolu Villa Zil Paneli (Kart Okuyuculu) 2K-61 Kullanım Kılavuzu RF CARD 2K-61 Villa Zil Paneli 1.Bölümler ve Fonksiyonları Kamera RF CARD Kart Okutma Penceresi 182 mm Hoparlör Gece Görüş Ledi RF CARD
Oransal Kontrol Cihazı RWF 40
 Oransal Kontrol Cihazı RWF 40 Güç artımı AÇ/2. kademe Güç azaltma KAPAT/1ci kademe Brülör devrede Değer azaltma 2ci kademe çalışma Gerçek değer görünümü (kırmızı) Ayar noktası görünümü (yeşil) El kontrol
Oransal Kontrol Cihazı RWF 40 Güç artımı AÇ/2. kademe Güç azaltma KAPAT/1ci kademe Brülör devrede Değer azaltma 2ci kademe çalışma Gerçek değer görünümü (kırmızı) Ayar noktası görünümü (yeşil) El kontrol
BQ300 RF Röle Kontrol Ünitesi. Kullanım Kılavuzu. Doküman Versiyon: 1.1 18.11.2015 BQTEK
 RF Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.1 18.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı Şeması...
RF Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.1 18.11.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı Şeması...
DTB B Serisi Sıcaklık Kontrol Cihazı
 DTB B Serisi Sıcaklık Kontrol Cihazı 1-) GİRİŞ SENSÖR TİPİ SEÇİMİ: DTB de giriş sensör tipi akım, gerilim, PT100 veya Termokupl olabilir. : Çalışma ekranından tuşu ile ulaşılır. B,S,R tipi termokupllar
DTB B Serisi Sıcaklık Kontrol Cihazı 1-) GİRİŞ SENSÖR TİPİ SEÇİMİ: DTB de giriş sensör tipi akım, gerilim, PT100 veya Termokupl olabilir. : Çalışma ekranından tuşu ile ulaşılır. B,S,R tipi termokupllar
Cihazýnýzý kullanmadan önce lütfen DÝKKATLE okuyun!!..
 TOU 01 KULLANMA KLAVUZU EPC (Teknolojik deðiþiklikler nedeniyle deðiþiklik hakký saklýdýr. Üretici Firma deðiþiklikleri önceden haber verilmeksizin yapabilir.) Cihazýnýzý kullanmadan önce lütfen DÝKKATLE
TOU 01 KULLANMA KLAVUZU EPC (Teknolojik deðiþiklikler nedeniyle deðiþiklik hakký saklýdýr. Üretici Firma deðiþiklikleri önceden haber verilmeksizin yapabilir.) Cihazýnýzý kullanmadan önce lütfen DÝKKATLE
İçerik. Ürün no.: CML730i-R R/CV-M12 Işık perdesi alıcı
 Ürün no.: 50119252 CML730i-R10-960.R/CV-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50119252 CML730i-R10-960.R/CV-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
IP Üzerinden HDMI KVM Sinyal Uzatma Cihazı
 IP Üzerinden HDMI KVM Sinyal Uzatma Cihazı Önemli Güvenlik Talimatları Kullanma Kılavuzu DS-55202 1. Kurulumdan önce verici ve alıcıyı karıştırmayın. 2. Cihaz çalışıyorken fişini prizden çekmeyin. Kolay
IP Üzerinden HDMI KVM Sinyal Uzatma Cihazı Önemli Güvenlik Talimatları Kullanma Kılavuzu DS-55202 1. Kurulumdan önce verici ve alıcıyı karıştırmayın. 2. Cihaz çalışıyorken fişini prizden çekmeyin. Kolay
İçerik. Ürün no.: CSL710-R A/L-M12 Işık perdesi alıcı
 Ürün no.: 50128973 CSL710-R40-2210.A/L-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50128973 CSL710-R40-2210.A/L-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
MİDEA ISI POMPASI-HAVUZ /SPA SU ISITMA
 MİDEA ISI POMPASI-HAVUZ /SPA SU ISITMA Bireysel ve Ticari Tipler üzme Havuzu için Isıtma ve Soğutma Suyu sağlar. Kapasite Durumu 6 kw: 40m³ 8 kw: 50m³ BİREYSEL HAVUZ/SPA ISI POMPASI 12kW: 60~85m³ 14kW:
MİDEA ISI POMPASI-HAVUZ /SPA SU ISITMA Bireysel ve Ticari Tipler üzme Havuzu için Isıtma ve Soğutma Suyu sağlar. Kapasite Durumu 6 kw: 40m³ 8 kw: 50m³ BİREYSEL HAVUZ/SPA ISI POMPASI 12kW: 60~85m³ 14kW:
Üniversal Giriþli Proses indikatörü
 Üniversal Giriþli Proses Ýndikatörü UPI4-2100 UPI4-2100 L1 L2 L3 Out1 Out2 Universal Process Indicator Üniversal Giriþli Proses indikatörü mv, V, ma, termocuple ve RTD giriþi seçilebilir ( 16 bit çözünürlük
Üniversal Giriþli Proses Ýndikatörü UPI4-2100 UPI4-2100 L1 L2 L3 Out1 Out2 Universal Process Indicator Üniversal Giriþli Proses indikatörü mv, V, ma, termocuple ve RTD giriþi seçilebilir ( 16 bit çözünürlük
B2 SERİSİ TARTI GÖSTERGESİ KULLANMA KILAVUZU. Tuşlar ve işlevleri. İşaretler ve anlamları
 888888 Tuşlar ve işlevleri Sıfırlama tuşu: Terazinin/Baskülün kefesi boş olduğu halde göstergede tam sıfır değeri görülmüyor ise bu tuşa basarak sıfırlanır. Gösterge değeri çekerin ±2%'si dışında ise sıfırlama
888888 Tuşlar ve işlevleri Sıfırlama tuşu: Terazinin/Baskülün kefesi boş olduğu halde göstergede tam sıfır değeri görülmüyor ise bu tuşa basarak sıfırlanır. Gösterge değeri çekerin ±2%'si dışında ise sıfırlama
BENNĐNG TÜRKÇE ÜRÜN KURULUM VE KULLANIM KILAVUZU IT 120 (TESĐSAT TOPRAKLAMA MULTĐMETRE)
") BENNĐNG TÜRKÇE ÜRÜN KURULUM VE KULLANIM KILAVUZU IT 120 (TESĐSAT TOPRAKLAMA MULTĐMETRE) Emniyet ve Kullanım Uyarıları 1. Emniyet ve Kullanım uyarı 1.1 Dikkat - Bu belge kullanıcı el kitabının yerine geçmez.
BENNĐNG TÜRKÇE ÜRÜN KURULUM VE KULLANIM KILAVUZU IT 120 (TESĐSAT TOPRAKLAMA MULTĐMETRE) Emniyet ve Kullanım Uyarıları 1. Emniyet ve Kullanım uyarı 1.1 Dikkat - Bu belge kullanıcı el kitabının yerine geçmez.
3.5 mm kontak pin mesafesi 1 Kutup 12 A PCB ye direkt soketli montaj
 41 Serisi - Alçak Profil PCB Röleler 8-12 - 16 A Özellikler 1 ve 2 Kutup - Alçak profil (15.7 mm yükseklik) 41.31-1 Kutup 12 A (3.5 mm pin mesafesi) 41.52-2 Kutup 8 A (5 mm pin mesafesi) 41.61-1 Kutup
41 Serisi - Alçak Profil PCB Röleler 8-12 - 16 A Özellikler 1 ve 2 Kutup - Alçak profil (15.7 mm yükseklik) 41.31-1 Kutup 12 A (3.5 mm pin mesafesi) 41.52-2 Kutup 8 A (5 mm pin mesafesi) 41.61-1 Kutup
Önsöz. Paket Kontrol. Kurulum
 Önsöz Bu bilgi dokümanı, Delta ASDA-A serisi AC servo sürücü ve ASMT serisi servo motorun kurulumu, bağlantısı, kontrolü ve çalışması hakkında bilgi verir. Doğru kullanım için ürünler çalışılmadan önce
Önsöz Bu bilgi dokümanı, Delta ASDA-A serisi AC servo sürücü ve ASMT serisi servo motorun kurulumu, bağlantısı, kontrolü ve çalışması hakkında bilgi verir. Doğru kullanım için ürünler çalışılmadan önce
Hızlı Kurulum Kılavuzu MODELLER P4320, P4520 UYARI!
 Fisheye IP Kamera Hızlı Kurulum Kılavuzu MODELLER P4320, P4520 UYARI! Kurulum işlemine geçmeden önce kurulum kılavuzunu dikkatlice okuyunuz. Bu kılavuzunun içeriği, fonksiyonlardaki değişiklikler önceden
Fisheye IP Kamera Hızlı Kurulum Kılavuzu MODELLER P4320, P4520 UYARI! Kurulum işlemine geçmeden önce kurulum kılavuzunu dikkatlice okuyunuz. Bu kılavuzunun içeriği, fonksiyonlardaki değişiklikler önceden
FRENIC ECO ÖZET KULLANIM KLAVUZU
 FRENIC ECO ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 - X5 Y1 - Y3 DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) DİJİTAL ÇIKIŞ SW1 CMY
FRENIC ECO ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 - X5 Y1 - Y3 DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) DİJİTAL ÇIKIŞ SW1 CMY
MX2 İnvertörlerde Frenleme Direnci Bağlantısı
 MX2 İnvertörlerde Frenleme Direnci Bağlantısı İÇİNDEKİLER Giriş Harici Frenleme Direnci(Dinamik) Kullanımı Frenleme Direnci Boyutları ve Seçim Tablosu MX2 de Frenleme Direnci Bağlantıları MX2 de Frenleme
MX2 İnvertörlerde Frenleme Direnci Bağlantısı İÇİNDEKİLER Giriş Harici Frenleme Direnci(Dinamik) Kullanımı Frenleme Direnci Boyutları ve Seçim Tablosu MX2 de Frenleme Direnci Bağlantıları MX2 de Frenleme
Çok Fonksiyonlu Kablo Test Cihazı. Kullanım Kılavuzu. Kullanmadan önce bu kılavuzu tamamen okuyunuz
 Çok Fonksiyonlu Kablo Test Cihazı Kullanım Kılavuzu Kullanmadan önce bu kılavuzu tamamen okuyunuz GİRİŞ Bu alet bir Net Toner ve bir Net Probdan oluşur. Aktif bir ağa kablo bağlantısını test etmek ve port
Çok Fonksiyonlu Kablo Test Cihazı Kullanım Kılavuzu Kullanmadan önce bu kılavuzu tamamen okuyunuz GİRİŞ Bu alet bir Net Toner ve bir Net Probdan oluşur. Aktif bir ağa kablo bağlantısını test etmek ve port
1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI
 1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI 3.UYARILAR Cihazı kullanmaya başlamadan önce mutlaka kullanma kılavuzu okunmalıdır ve cihaz kullanımında kılavuzdaki talimat ve uyarılara uyulmalıdır. Aksi takdirde
1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI 3.UYARILAR Cihazı kullanmaya başlamadan önce mutlaka kullanma kılavuzu okunmalıdır ve cihaz kullanımında kılavuzdaki talimat ve uyarılara uyulmalıdır. Aksi takdirde
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü
 DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
GTEC Elektronik LTT500A Serisi. Sızdırmazlık Test Cihazı. Otomatik Regülatörlü
 GTEC Elektronik LTT500A Serisi Sızdırmazlık Test Cihazı Otomatik Regülatörlü Aşağıda cihazın açılış ekranı ve fonksiyonları gösterilmiştir. Cihaz açıldığında bu ekran 3 Sn görülür.bu arada cihaz dahili
GTEC Elektronik LTT500A Serisi Sızdırmazlık Test Cihazı Otomatik Regülatörlü Aşağıda cihazın açılış ekranı ve fonksiyonları gösterilmiştir. Cihaz açıldığında bu ekran 3 Sn görülür.bu arada cihaz dahili
Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu
 Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu 1. Adım : Motor & Sürücü Bağlantılarını Yapınız. 2. Adım : Motor Plaka Değerlerine Bakınız Mentor II nin parametrelerini ayarlamak için, önce motor
Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu 1. Adım : Motor & Sürücü Bağlantılarını Yapınız. 2. Adım : Motor Plaka Değerlerine Bakınız Mentor II nin parametrelerini ayarlamak için, önce motor
TOSHIBA TOSVERT VF-NC1S PARAMETRE TABLOSU TEMEL PARAMETRELER
 TOSHIBA TOSVERT VF-NC1S PARAMETRE TABLOSU TEMEL PARAMETRELER AUH Tarih Fonksiyonu En son değiştirilen 5 parametreyi grup olarak gösterir :- 1:Temel ayarlama sihirbazı 2:Preset hız sihirbazı AUF Sihirbaz
TOSHIBA TOSVERT VF-NC1S PARAMETRE TABLOSU TEMEL PARAMETRELER AUH Tarih Fonksiyonu En son değiştirilen 5 parametreyi grup olarak gösterir :- 1:Temel ayarlama sihirbazı 2:Preset hız sihirbazı AUF Sihirbaz
MODEL OP-LP1 MODEL OP-LP2
 MODEL OP-LP1 MODEL OP-LP2 MESAFE / POZİSYON ÖLÇME VE KONTROL CİHAZI Sürüm 2.0 KULLANMA KILAVUZU UYARI! CİHAZI KULLANMADAN ÖNCE DİKKATLİCE OKUYUNUZ 1. Cihazın elektriksel bağlantılarını son sayfada belirtilen
MODEL OP-LP1 MODEL OP-LP2 MESAFE / POZİSYON ÖLÇME VE KONTROL CİHAZI Sürüm 2.0 KULLANMA KILAVUZU UYARI! CİHAZI KULLANMADAN ÖNCE DİKKATLİCE OKUYUNUZ 1. Cihazın elektriksel bağlantılarını son sayfada belirtilen
1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI
 1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI 3.UYARILAR Cihazı kullanmaya başlamadan önce mutlaka kullanma kılavuzu okunmalıdır ve cihaz kullanımında kılavuzdaki talimat ve uyarılara uyulmalıdır. Aksi takdirde
1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI 3.UYARILAR Cihazı kullanmaya başlamadan önce mutlaka kullanma kılavuzu okunmalıdır ve cihaz kullanımında kılavuzdaki talimat ve uyarılara uyulmalıdır. Aksi takdirde
AKE GAZLI DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU
 KULLANIM KILAVUZU") AKE.370.502.01.02 GAZLI DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU AKE.370.502.01.02 GAZLI DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU 1 1.CİHAZ ÖLÇÜLERİ
AKE.370.502.01.02 GAZLI DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU AKE.370.502.01.02 GAZLI DÖNER TABANLI FIRIN KONTROL KARTI (7 TFT DOKUNMATİK) KULLANIM KILAVUZU 1 1.CİHAZ ÖLÇÜLERİ
İÇİNDEKİLER. Önlemler Önemli Bilgiler Ürün İnceleme LCD ekran Telsiz şeması açıklamaları Temel işlemler- Gelişmiş özellikler
 İÇİNDEKİLER Önlemler Önemli Bilgiler Ürün İnceleme LCD ekran Telsiz şeması açıklamaları Temel işlemler- Gelişmiş özellikler 2 3-4 5 5 6 1 Değerli Müşterimiz LUITON LT- 002 ürününü tercih ettiğiniz için
İÇİNDEKİLER Önlemler Önemli Bilgiler Ürün İnceleme LCD ekran Telsiz şeması açıklamaları Temel işlemler- Gelişmiş özellikler 2 3-4 5 5 6 1 Değerli Müşterimiz LUITON LT- 002 ürününü tercih ettiğiniz için
AKE MİKSER KONTROL KARTI-TEK HIZLI (7 SEG DOKUNMATİK YATAY TİP) KULLANIM KILAVUZU
 KULLANIM KILAVUZU") AKE.207.001.04.01 MİKSER KONTROL KARTI-TEK HIZLI (7 SEG DOKUNMATİK YATAY TİP) KULLANIM KILAVUZU AKE.207.001.04.01 MİKSER KONTROL KARTI-TEK HIZLI (7 SEG DOKUNMATİK YATAY TİP) KULLANIM KILAVUZU 1 1.CİHAZ
AKE.207.001.04.01 MİKSER KONTROL KARTI-TEK HIZLI (7 SEG DOKUNMATİK YATAY TİP) KULLANIM KILAVUZU AKE.207.001.04.01 MİKSER KONTROL KARTI-TEK HIZLI (7 SEG DOKUNMATİK YATAY TİP) KULLANIM KILAVUZU 1 1.CİHAZ