MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
|
|
|
- Levent Gündoğdu
- 5 yıl önce
- İzleme sayısı:
Transkript



1 MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Fren Sistemi Genel ABS, BAS, EBD, ASR/TCS, MSR, ESP/VSC Yrd. Doç. Dr. Abdullah DEMİR
2 FRENLER-GENEL Frenler, güvenli sürüş için taşıtlarda bulunan en önemli aktif emniyet donanımıdır. Hareket halindeki taşıtı yavaşlatmak, durdurmak, taşıtın hızını kontrol altında tutmak ve duran taşıtı yerinde sabit tutmak amacıyla kullanılır. Taşıtlarda tekerlek freni olarak sürtünmeli frenler kullanılmaktadır. Genel olarak doğrudan doğruya tekerleğe bağlı olan bu frenler iki ana fonksiyonu yerine getirirler. Fren momentinin oluşturulması, Enerji değişiminin gerçekleştirilmesi (kinetik veya potansiyel enerjinin ısı enerjisine dönüştürülmesi) ve oluşan ısının atılması [1]. AD, Doktora Tezi


: Park freni, sürücü olmaksızın da, aracı yokuş ve inişlerde hareketsiz tutabilmelidir. Sürücü, römorklar hariç, bu frene oturduğu yerden kumanda edebilmelidir.")
3 FRENLER-GENEL Ana fren (Servis freni): Ana fren, sürücüye aracın hareketine kumanda edebilmesi ve onu emniyetli, çabuk ve etkin şekilde durdurmasına olanak vermelidir. Etkisi kademelendirilebilir olmalıdır. Sürücü, frenlemeyi oturduğu yerden ve ellerini direksiyondan ayırmadan sağlayabilmelidir. Yardımcı fren (İmdat freni): Yardımcı fren, ana fren devre dışı kaldığında, aracı uygun bir uzaklıkta durdurabilmelidir. Etkisi kademelendirilebilir olmalıdır. Sürücü frene oturduğu yerden ve en az tek elle direksiyon kumandasını koruyarak erişebilmelidir. Bu frenin, ana frenin en çok bir yerinde arıza olması halinde, aracı durdurmaya yardımcı olabileceği kabul edilmiştir. Park freni (Tespit freni): Park freni, sürücü olmaksızın da, aracı yokuş ve inişlerde hareketsiz tutabilmelidir. Sürücü, römorklar hariç, bu frene oturduğu yerden kumanda edebilmelidir. Park freni, etkisi kademelendirilebiliyorsa, yardımcı fren olarak da sayılabilir. Egzoz freni: Egzoz çıkışını engelleyerek, aracın hızını motordan yararlanarak kesmeyi sağlayan frenlemedir. Yavaşlatıcılar: Motor freni ve tekerleklerdeki sürtünme frenleri dışında, enerji yutarak veya depolayarak aracın hızını kesmekte kullanılan volan, vites kutusu çıkışında kullanılan kasnak gibi düzenlerdir. Taşıt Konstrüksiyonu - A.G.Göktan, 2001/2002

4 Taşıt Konstrüksiyonu A.G.Göktan 2001/2002 FRENLER-GENEL
5 FRENLER-GENEL AD, Doktora Tezi, 2009

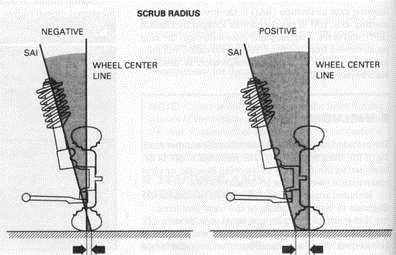
6 1. Ön-arka dağılımı: Ağırlık merkezi taşıtın ortasında veya arkaya doğru olan taşıtlar için uygundur. Basit ve ucuz bir şekildir. Fiat, Ford, Opel gibi markalarda uygulanmaktadır. 2. Diyagonal dağılım: Ağırlık merkezi taşıtın ön veya ortasına doğru olan taşıtlar için uygundur. Bu dağılım şekli kullanıldığında, bir devrenin arızalanması halinde aşırı direksiyon momentlerinin ortaya çıkmaması için ön tekerleklerin yuvarlanma dairesi yarıçaplarının negatif olması şarttır. Basit ve ucuz bir şekildir. Uygulamada Audi, Saab, Volkswagen gibi markalarda kullanılmaktadır. 3. Ön aks, arka-ön aks dağılımı: Yalnız ağırlık merkezi önde olan taşıtlar için uygundur. Ön tekerlek frenleri ikişer silindirli olduğundan 1 ve 2 numaralı dağılımlardan daha pahalıdır. BMW marka otomobillerde uygulanmaktadır. A negative roll radius exists when the steering axis line is outside of the tire center line (in other words, the imaginary intersection of these two lines is above the road surface).

7 4. Ön aks, arka tekerlek - ön aks, arka tekerlek dağılımı: Ağırlık merkezi ortada veya öne doğru olan taşıtlar için uygundur. Ön tekerlek frenleri ikişer silindirli olduğundan 1 ve 2 numaralı dağılımlardan daha pahalıdır. Volvo marka otomobillerde kullanılmaktadır. 5. Ön ve arka aks - ön ve arka aks dağılımı: Ağırlık merkezinin yerinin önemi yoktur. Teorik olarak ideal dağılım şeklidir. Konstrüksiyonunda yerleştirme sorunu çıkarmaktadır. En pahalı uygulamadır. Rolls Royce marka otomobillerde kullanılmaktadır.
.")

8 The steering roll radius determines the extent to which the steering system is affected by disturbance forces (brakes pulling unevenly, driving forces under traction/overrun conditions with frontwheel drive). Today, the goal is to achieve a steering roll radius which is "zero" to "slightly negative". A negative roll radius exists when the steering axis line is outside of the tire center line (in other words, the imaginary intersection of these two lines is above the road surface). Note: The term Steering Roll Radius is also known as Scrub Radius, Steering Offset or King Pin Offset.

9

10 Sürtünmeli frenler: kampanalı ve diskli olmak üzere ikiye ayrılır. FRENLER-GENEL Taşıt Frenleri, A.G.Göktan

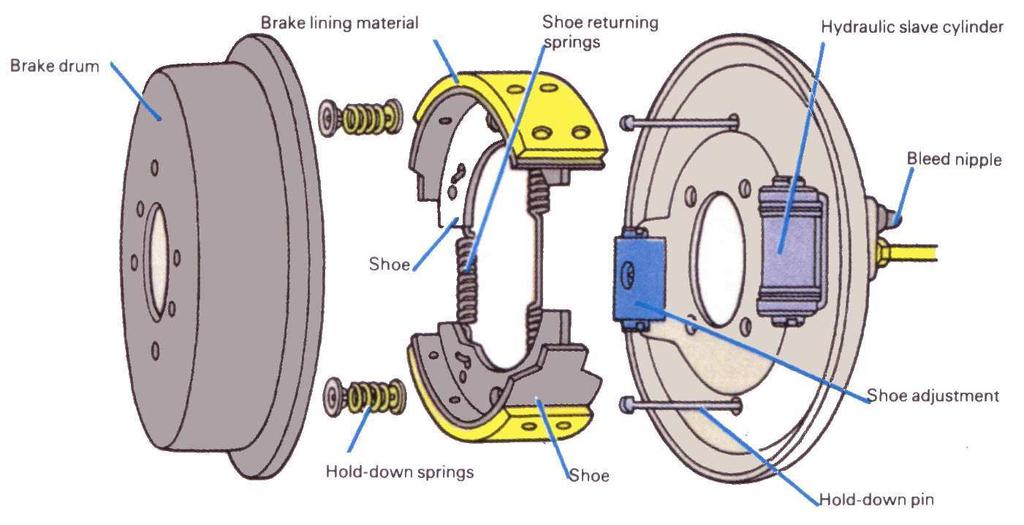
11 Kampanalı frenler Kampanalı frenlerde fren yüzeyi silindiriktir. Çeşitli tipleri olmakla birlikte karayolu taşıtlarının tekerlek frenlerinde içten pabuçlu olanlar kullanılmaktadır. Bantlı frenler genellikle otomatik vites kutularında, dıştan pabuçlu frenler ise raylı taşıtlarda bulunmaktadır. Kampanalı bir frenin ana parçaları kampana, pabuçlar, baskı düzeni ve taşıma düzenidir. Kampana, işletme şartlarının gerektirdiği mukavemet ve ısıl özellikleri sağlamak üzere konstrükte edilir. FRENLER-GENEL Taşıt Frenleri, A.G.Göktan

12
13
14 Kampanalı Fren Konstrüksiyonları a) simpleks b) dupleks c) servo d) duo dupleks e) duo servo Taşıt Konstrüksiyonu A.G.Göktan 2001/2002
: Çevresel kuvvet F U, yol yüzeyinde etkilidir.")
15 İÇ ÇEVRİM KATSAY)S) Brake coefficient C*: Defines the relationship between the total circumferential force of a given brake and the respective brake's application force. C* = Fu / Fs Fu Total circumferential force, Fs Application force. Çevresel kuvvet (Fu): Çevresel kuvvet F U, yol yüzeyinde etkilidir. Application force Fs: In friction brakes, the total force applied to a brake lining, which causes the braking force by friction effect. The mean is employed when there are variations in the application forces at the individual brake shoes (i Number of brake shoes). Fs = ΣFsi / I C*: İç çevrim oranı, İç aktarma oranı, tanımlama değeri ya da fren/leme/ katsayısı
: Ratio between the total braking force, Ff, and the static weight, Gs, on the axle or the axles of the vehicle: z: F f / G s")
16 FREN İYİLİK DERECESİ FRENLEME FAKTÖRÜ/ORAN) Fren iyilik derecesi: Negatif ivmenin yerçekimi ivmesine oranına frenleme oranı "z" adı verilmektedir. z: -a/g Braking factor (z): Ratio between the total braking force, Ff, and the static weight, Gs, on the axle or the axles of the vehicle: z: F f / G s = -a/g
17 C* as an assessment criterion for brake performance, indicates the ratio of braking force to actuating force. This value takes into account the influence of the internal transmission ratio of the brake as well as the friction coefficient, which in turn is mainly dependent on the parameters speed, brake pressure and temperature. C* as a function of the coefficient of friction and initial road speed 1 Duo-servo drum brake, 2 Duo-duplex drum brake, 3 Simplex drum brake, 4 Disc brake. Automotive Handbook, Robert Bosch GmbH, 2002
.")

18 In the case of the Simplex drum brake, C* is the sum of the values for the individual shoes, and is 2.0 (referred to a coefficient of friction of μ = 0.38; it always appears in the following C* observations as the basis value). A disadvantage of this design is the considerable difference in the braking effect between the two brake shoes, and the resulting greatly increased wear on the leading shoe as compared to the trailing shoe. The high degree of adaptive braking required at high highway speeds is handled better by disc brakes. The brake discs are less susceptible to cracking than the drums of the drum brakes, apart from which disc brakes are less subject to fading. The brake factor of the disc brake is C* 0.76, referred to the basis value of = Automotive Handbook, Robert Bosch GmbH, 2002



19 DİSKE ETKİYEN KUVVET VE MOMENTLER Zamanla tekerlek yarıçapları ve dolayısıyla kulla ıla rb/r ora ı küçültüldü. Böylelikle çevresel kuvvetlerin daha büyük ol ası gerekti. Taşıt Frenleri, Ali Göktan

20 FRENLERDE ISINMA Fren sistemi elemanlarının çok çabuk ısınmasını önlemek için ısı depolama kapasitelerinin büyük olması gerekmektedir. Bu kapasite özgül ısı kapasitesi ile fren ağırlığının çarpımı ile elde edilir. Bu durumda fren sisteminin büyük ve özgül ısı kapasitesinin de yüksek olması uygundur. Ancak taşıt konstrüksiyonu ile ilgili sınırlayıcı faktörler nedeniyle özellikle otomobillerde fren sistemleri fazla büyük seçilememektedir. Böylece alüminyum alaşımları kullanılarak bu malzemenin demire oranla üç katı daha yüksek olan ısı kapasitelerinden yararlanılabilmektedir. Ayrıca ısı iletim katsayısı da büyük olan alüminyumun kullanımında sıcaklık dağılımı daha dengeli olabilmektedir. Ancak sürtünme elemanı olarak alüminyum fazla yumuşak olduğundan sürtünme yüzeyinin kaplanması yoluna gidilmelidir. Fren sistemlerinde, frenleme esnasında oluşan ısının mümkün olduğunca hızlı bir şekilde sistemden uzaklaştırılması gerekmektedir. Böylece frenleme sırasında sistemin sıcaklığının hızlı artması önlendiği gibi frenleme işlemi tamamlandığında sistemde hızlı bir soğuma sağlanmış olur. Bu nedenle fren sistemlerinin yerleştirildiği bölgenin kapalı olmaması gerekir. Isı transferinin artırılabilmesi için fren sistemleri seyir rüzgârına maruz kalacak şekilde yerleştirilmelidirler. Ayrıca ısı transfer yüzey alanının arttırılması ısının sistemden hızlı bir şekilde uzaklaştırılmasını sağlar. Bu amaçla diske ve kaliper sistemine soğutma kanalları ve kanatçıkları uygulanmaktadır. AD, Doktora Tezi, 2009

21 Fren hidroliği Not: Fren hidroliği, sistemdeki hortumlar aracılığıyla genelde tahliye yoluyla nemi emer. Bu nedenle fren hidroliği 1 yada 2 yılda bir değiştirilmelidir. Frenleme güvenliğinin sağlanması için fren hidroliğini değiştirmek oldukça önemlidir. Bu çalışma esnasında sistemde sıkışan havanın dışarı atılmasına (hava tahliyesine) dikkat edilmelidir. KİA
.")
22 FRENLER-GENEL Fren hidroliği belirli özelliklere sahip özel bir yağdır. Soğuk havalarda yoğunlaşmaya, sıcak havalarda kaynamaya karşı dayanıklı şekilde tasarlanmıştır (Fren hidroliği kaynarsa, pedalının sünger gibi olmasına neden olur ve aracın durması zorlaşır.). Fren hidroliği Ulaştırma Bakanlığı (DOT) tarafından belirlenen standartları karşılamalıdır. Fren hidroliği haznesi ana silindirin üst kısmındadır. Günümüzde araçların çoğunda saydam bir hazne bulunduğundan kapağı açmadan sıvı seviyesi görülebilmektedir. Fren balataları aşındığında, fren hidroliği seviyesinde hafif bir düşme olacaktır. Bu normaldir ve ciddi bir durum söz konusu değildir. KİA
23 FRENLER-GENEL Fren Sıvısının Kaynama Noktası A. Demir, Frenlemenin Termik Açıdan İncelenmesi, Sunum

24 Frenleme esnasında disk ve balata arayüzünde oluşan yüksek sıcaklıklar; frenlerin zayıflamasına, erken aşınmalara, fren sıvısının buharlaşmasına, yatak arızalarına, termik çatlaklara, termik olarak uyarılmış titreşimlere ve gürültüye sebep olmaktadır [3]. AD, Doktora Tezi, 2009
![OKUMA METNİ: Fren zayıflaması; balata zayıflaması, fren sıvısının kaynaması ve green fade (balatanın gazlaşması) olarak üç grupta incelenebilir [4].](/docs-images/91/105360929/images/25-2.jpg "Buda yük zayıflaması, hız zayıflaması ve sıcaklık zayıflaması olarak üç mekanizma olarak karşımıza çıkmaktadır [5].")
25 OKUMA METNİ: Fren zayıflaması; balata zayıflaması, fren sıvısının kaynaması ve green fade (balatanın gazlaşması) olarak üç grupta incelenebilir [4]. Buda yük zayıflaması, hız zayıflaması ve sıcaklık zayıflaması olarak üç mekanizma olarak karşımıza çıkmaktadır [5]. Sıcaklık ve sürtünen yüzeylerdeki rölatif hızdaki değişim sürtünme katsayısını etkilemektedir. Artan sıcaklık ve kayma hızı ile sürtünme katsayısı düşerek frenleme zayıflamasına neden olmaktadır. Ancak, yapılan çalışmalarda ve endüstride farklı fren zayıflaması yaklaşımları da bulunmaktadır. Genel de ise; fren zayıflaması mekanik ve sıcaklık zayıflaması olarak bilinmektedir. Fren zayıflamasının nedeni olarak frenleme esnasında sürtünme katsayısındaki [µ] değişim ve kampanadaki genleşmedir. Abdullah De ir, Fre le ede Zayıfla a ı ırı ı Tespiti ve İyileştir e Çalış aları, 2008
26 Abdullah De ir, Fre le ede Zayıfla a ı ırı ı Tespiti ve İyileştir e Çalış aları, 2008
.")
27 The real-world figures are always somewhat lower, as all the vehicle's tires do not simultaneously exploit their maximum adhesion during each acceleration (deceleration). Electronic traction control and antilock braking systems (TCS, ABS, ESP) maintain the traction level in the vicinity of the coefficient of static friction.

 yer alır.")
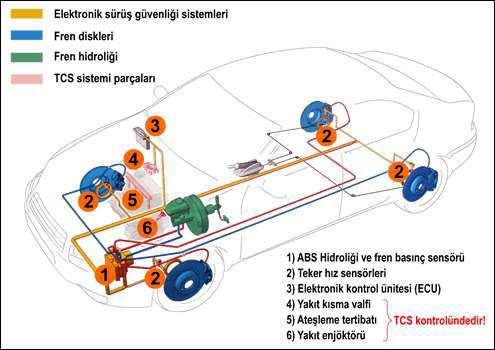
28 (İDROLİK FREN SİSTEMİNİN TİPİK DÜZENİ Tipik fren sistemi; ön tarafta disk frenler ve freni her bir tekerlekten ana silindire bağlayan borular ve hortumlardan oluşan bir sisteme bağlanan arka tarafta ise disk veya kampanalı frenlerden oluşur. Fren sistemiyle bağlanan diğer sistemlerde el frenleri, fren kuvveti servoları ile bazı araçlarda Kilitlemeyi Önleyici Fren Sistemi (ABS) veya Elektronik Stabilite Programı (ESP) yer alır. Ayrıca belirli bazı modellerde ABS ve ESP Hidrolik Elektronik Kontrol Ünitesi nin (HECU) içerisinde Çekiş Kontrol Sistemi (TSC) bulunur. KİA

29 Electronic/compressed-air braking system for two-axle tractor 1 Wheel-speed sensor, 2 Brake-pad wear sensor, 3 Control valve, 4 Front-wheel cylinder, 5 Rear-wheel cylinder, 6 ECU, 7 Brake pedal, 8 Compressed-air cylinder, 9 Compressed-air supply to trailer, 10 Trailer control line, 11 Coupling-force sensor, 12 Steering-wheel position sensor, 13 Control for retarder and engine-braking system, 14 Yaw-rate/lateral-acceleration sensor. Automotive Handbook, Robert Bosch GmbH, 2002

30 ABS - ANTILOCK BRAKING SYSTEMS


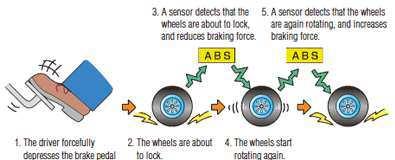
31 ABS - ANTILOCK BRAKING SYSTEMS ABS antilock braking systems are closed-loop control devices within the braking system which prevent wheel lock-up during braking and, as a result, retain the vehicle's steerability and stability. The main ABS components are: Hydraulic modulator, wheel-speed sensors, and the ECU for signal processing and control and triggering of the signal lamp and of the actuators in the hydraulicmodulator. ABS: Orijinal İngilizcesiyle Anti-lock Braking System, Türkçeye kilitlenmeyi önleyici fren sistemi ya da bloke olmayı önleyici fren sistemi olarak çevrilebilir. ABS, frenleme esnasında tekerleklerin kilitlenmesini önler. Frenleme etkisini artırmanın yanı sıra stabilite ve yönlendirme yeteneği de korur.
 5")
32 Reference variableμ Referans değişken Maniulated variableμ Ayarlanmış değişken Controlled variableμ Kontrol edilen değişken Anahtar Kavram/lar: vehicle's steerability and stability Automotive Handbook, Robert Bosch GmbH, 2002 ABS control loop 1 Solenoid-valve unit 2 Master cylinder 3 Wheel-brake cylinder 4 Electronic control unit (ECU) 5 Wheel-speed sensor


33 Taşıt Fre leri, A.G.Gökta ve Arkadaşları, 1995 ve Taşıt Ko strüksiyo u Ders Notları, A.G.Gökta 2001/2002 KUVET BAĞLANT) KATSAY)S) Kuvvet bağlantısı ve kayma Tekerleğe bir M T momenti etki ediyorsa, ivmesiz harekette denklemine göre Fx = M T /r F R bulunur. M T /r oranına tekerlek çeki kuvveti denir. Tekerlek çevre kuvveti = Tekerlek çeki kuvveti - Yuvarlanma direnci (F R ) Ancak burada bulunan çevre kuvveti sınırsız olmayıp, zeminle lastik tekerlek arasındaki kuvvet bağlantısına bağlıdır. μ, kuvvet bağlantı katsayısını gösterirsek, Fx = μ Fz çevre kuvvetinin alabileceği değerler bulunur. Kuvvet bağlantı katsayısı lastiğin dönerken zemin üzerinde kaymasına bağlıdır. X Z M T F x F z m T J T v r e μ taşıtın tekerleğe tepki kuvveti μ taşıtın ağırlığından tekerleğe düşen kuvvet : tekerlek momenti μ tekerlek çevre kuvveti : yolun tepki kuvveti = tekerlek yükü μ tekerlek kütlesi : tekerlek ataleti μ taşıt hızı μ tekerlek statik yarıçapı μ tekerlek yükünün etkime noktasının eksenden kaçıklığı

34 OKUMA PARÇASI Yuvarlanma direnci; aracın yüklü ağırlığına, yol yüzeyinin türüne ve lastik üretiminde kullanılan malzemelere, yapı ve dizaynlara bağlı olarak değişir. Yuvarlanma direncini oluşturan ikincil nedenler olarak; tekerlek yatağı, yağ keçesi sürtünmesi ve transmisyon sistemindeki yağın çalkalanmasıdır. Yuvarlanma direnci, tekerlek yuvarlanırken zeminle temas bölgesinin ezilmesi, bu bölgeye giren lastik elemanlarının sıkışması, çıkan elemanların uzaması, bu olayın zeminde asimetrik bir basınç doğurması ve sıkışıp uzama olayının kayıplı olmasından kaynaklanmaktadır. Not: Detaylı inceleme için Ek 1 e bakınız.

35 KAYMA Kuvvet bağlantı katsayısı lastiğin dönerken zemin üzerinde kaymasına bağlıdır. Kaymasız yuvarlanan bir tekerlek bir dönüşünde yuvarlanma çevresi adı verilen U mesafesini kat eder. U = 2.π.R den hesaplanan R'ye dinamik tekerlek yarıçapı denir. Tekerleğin yuvarlanarak eriştiği çevresel hız R, taşıt hızı v den farklı ise kayma olmaktadır. Bu iki hızın farkının büyük olan hıza oranına kayma denir. Kayma hep pozitif olsun diye frende ve tahrikte iki farklı ifade kullanılır. Kayma 0 ile 1 arasında değerler alır. Taşıt Fre leri, A.G.Gökta ve Arkadaşları, 1995 ve Taşıt Ko strüksiyo u Ders Notları, A.G.Gökta 2001/2002
/υ F 100 % Wheel speed υ R = r ω Braking force F B = HF G Lateral force F S = S G HF =Coefficient of friction,")

36 Adhesion/slip curve: The curve shape differs greatly as a function of road surface and tire condition. Brake slip = (υ F υ R )/υ F 100 % Wheel speed υ R = r ω Braking force F B = HF G Lateral force F S = S G HF =Coefficient of friction, S =Lateral-force coefficient. There is a more or less sharp drop in the coefficient of friction HF, depending upon the shape of the slip curve. The resulting excess torque causes the wheel to lock-up very quickly (when braking without ABS); this is expressed as a sharp increase in wheel deceleration
, taşıtın gerçek hızı (v 0 ) ile fren yapan tekerleğin çevresel hızı (v) arasındaki farkın taşıt hızına oranı olarak tanımlanmaktadır.")
37 EK OKUMA VE İNCELEME K)SM) Bilindiği gibi kuvvet bağlantı katsayısı kaymaya bağlı olarak değişmekte ve bu değişim tekerleklerin ve yolun cins ve durumlarına göre farklı şekiller alabilmektedir. Buradaki kayma (s), taşıtın gerçek hızı (v 0 ) ile fren yapan tekerleğin çevresel hızı (v) arasındaki farkın taşıt hızına oranı olarak tanımlanmaktadır. Bu tanıma göre fren yapan bir taşıtta bloke olmuş, yani dönmeyen (v = 0) bir tekerleğin kayması (s) 1, serbest yuvarlanan (v = v 0 ) bir tekerleğin kayması ise (s) 0 olmaktadır. μx kuvvet bağlantı katsayısının μh maksimum değerini aldığı noktadaki kaymaya da kritik kayma (sk) adı verilecektir. Kuvvet bağlantı katsayılarının kaymaya bağlı değişimi.

38 Kuvvet Bağlantı Katsayısı ile Kaymanın İlişkisi Kayma ile kuvvet bağlantı katsayısı arasındaki ilişki Şekilde gösterilmiştir. Kuvvet bağlantı katsayısının en büyük değerine μh tutunma katsayısı, kaymanın 1 olduğu değerine ise μg kayma katsayısı denir. Taşıt Fre leri, A.G.Gökta ve Arkadaşları, 1995 ve Taşıt Ko strüksiyo u Ders Notları, A.G.Gökta 2001/2002 Fx = μ Fz μ : kuvvet bağlantı katsayısı F x : tekerlek çevre kuvveti F z : yolun tepki kuvveti = tekerlek yükü

39 Kaynak: ABS & NVH, Toyota.
40

41 ABS Sistemi Şu Parçalardan Oluşur: EKÜ: Sensörlerden gelen sinyalleri baz alarak tekerlek ile yol yüzeyi arasındaki kayma miktarını saptar ve fren kumandasını kontrol eder. Fren Kumandası: Fren kumandası, EKÜ den gelen sinyallere uygun olarak tekerlek silindirlerinin hidrolik basıncını kontrol eder. Hız Sensörü: Hız sensörü dört tekerleğin her birinin hızlarını algılar ve EKÜ ye bir sinyal gönderir. Gösterge Paneli: ABS uyarı ışığı: EKÜ (Elektronik Kontrol Ünitesi), ABS veya Fren Destek Sisteminde bir arıza algıladığında, bu ışık yanarak sürücüyü uyarır. Fren Sistemi Uyarı Işığı: Bu ışık ABS uyarı ışığı ile aynı zamanda yandığında, sürücüyü ABS ve EBD sisteminde bir arıza olduğuna dair uyarır. EKÜ Arızalandığında: Normalde, EKÜ tarafından gösterge paneline veya ABS kontrol rölesine gönderilen sinyal nedeniyle uyarı ışığı kapalı tutulur (yanmaz). Eğer EKÜ arızalanırsa ve sinyal yoksa ABS uyarı ışığı, fren sistemi uyarı ışığı, TCS OFF gösterge ışığı (TCS ile donatılmış araçlarda) ve VSC uyarı ışığı (VSC ile donatılmış araçlarda) sürekli yanar. Kaynak: ABS & NVH, Toyota.

42 Stop Lamba Anahtarı: Fren pedalına basıldığında algılar ve EKÜ ye bir sinyal gönderir. ABS, stop lamba anahtarından gelen sinyali de kullanır. Bununla birlikte, stop lamba anahtarında meydana gelen bir arızadan dolayı, stop lamba anahtar sinyali EKÜ ye gelmiyorsa, lastikler kilitlenecek duruma geldiğinde ABS kontrol sistemi devreye girecektir. Böyle bir durumda, kayma oranı stop lamba sinyali normal çalıştığında ki duruma göre daha yüksek iken (tekerlekler kilitlenme eğilimi gösterince) kontrol başlar. Yavaşlama Sensörü: Yavaşlama sensörü aracın yavaşlama oranını algılar ve ABS EKÜ süne sinyal gönderir. EKÜ bu sinyalleri kullanarak hassasiyetle yol yüzey koşullarına karar verir ve gerekli kontrol ölçümlerini yapar. Not: Bu sistem sadece bazı modellerde kullanılabilmektedir. Kaynak: ABS & NVH, Toyota.
 kullanır.")


43 Endüktif Tekerlek Hız Sensörü EKÜ, tekerlek hız sensörleri tarafından tekerleklerin dönüş hızlarını belirlenmek için oluşturulan sinyalleri (tekerlek frekansları) kullanır. Tekerlek hızının artışıyla birlikte sinüs dalga voltajı ve frekansı da artar. Tekerlek göbeğine farklı takma konumları için değişik sensör konfigürasyonları mevcuttur. Her tekerlek hız sensörü için, kutup piminin sensör halkasına tam olarak yerleştirilmesi oldukça önemlidir. Tekerlek hız sensörü ve sensör halkası arasındaki boşluk yaklaşık 1-3 mm'dir ve güvenilir sinyal üretimi için tolerans kesin olmalıdır. Not: Bazı araçlarda sensör ve dişli çark arasındaki mesafe ayarlanabilir ve sensörde okunan değerin yanlış olması durumunda kontrol edilmelidir. Kaynak: KİA,

44 Kaynak: KİA, Fren Okuma Metni: Aktif Tekerlek (ız Sensörü Tekerlek hız sensörleri, ilk önce kilitlenmeyi önleyici fren sisteminin temel parçaları olarak geliştirilmiştir. Ancak, gelişen güvenlik sistemleri ile birlikte aktif tekerlek hız sensörleri gibi yeni tip sensörlere ihtiyaç duyulmuştur. Bu aktif sensörler aynı zamanda gelişmiş yönetim sistemlerinin, şanzıman kontrolünün, navigasyon sistemlerinin ve aktif süspansiyonların da entegre bir parçasıdır. Sensör, akım tüketimine dayalı olarak bir sinyal üretir. Küçük bir akım (yaklaşık 7 ma +/-%20) sensörden CU'ya iletilir. Bu küçük akım sensör elemanı tarafından kullanılır ve düşük sinyal olarak yorumlanır. MRE (Manyetik Direnç Elemanı), bir karşılaştırıcıya bağlanır. Karşılaştırıcı, transistörü açar açmaz yüksek bir akım (14 ma +/-%20) CU'ya iletilir ve yüksek sinyal olarak yorumlanır. Sensörün sinyal hattı, EKÜ nün içerisinde 115 Ohm'luk bir rezistör vasıtasıyla topraklanır. Bu yeni aktif sensör, hız algılamada en son teknolojiyi kullanmıştır, bunların arasında Uygulamaya Özel Entegre Devre (ASIC), algılama cihazı olarak Hall elemanları, veri işleme ve elektrik arayüzü vardır. Manyetik alandaki bu değişikliklerin nedeni sinyal çarkıdır. Hall elemanları, değişen manyetik alanla orantılı bir sinüsoid voltaj sinyali üretir. Sinüsoid sinyali, ASIC tarafından alternatif bir dijital sinyale dönüşür.

45 Kaynak: ABS & NVH, Toyota.


46 ABS EKÜ sü, tekerlek hız sensörlerinden gelen sinyalleri esas alarak, tekerleklerin dönme hızını araç hızı gibi algılar. Frenleme esnasında, her ne kadar tekerleklerin dönme hızı düşse de, yavaşlama miktarı hem frenleme sırasındaki araç hızını ve hem de kuru asfalt, ıslak veya buzlu yüzey gibi yol koşullarına bağlı olarak değişecektir. Diğer bir deyişle, EKÜ, frenleme esnasında tekerleklerin dönme hızlarındaki değişiklikten, tekerlekler ve yol yüzeyi arasındaki kayma şartlarına karar verir ve tekerleklerin hızını en uygun şekilde kontrol etmek için, fren kumanda grubundaki selenoid valfleri 3 modda kontrol eder: basınç düşürme, basınç tutma ve basınç yükseltme modları. Kaynak: ABS & NVH, Toyota.


47 Kontrol: EKÜ araç hız sinyallerini dört adet hız sensöründen sürekli olarak alır ve her bir tekerleğin hızını ve yavaşlamasını hesaplayarak aracın hızını tahmin eder. Fren pedalına basıldığı zaman, tüm tekerlek fren silindirlerindeki hidrolik basınç yükselmeye ve tekerlek hızı azalmaya başlar. Tekerleklerden herhangi birinin kilitlenmek üzere olduğu algılandığında, EKÜ bu tekerleğin fren silindirindeki hidrolik basıncını düşürür. AB HECU, girişler ve çıkışlar Kaynak: ABS & NVH, Toyota. Kaynak: KİA, Fre
48 Automotive Handbook, Robert Bosch GmbH, 2002 ABS System Variants

49 4 Sensörlü, 4 Kanallı tip Bu tipte dört tekerlek sensörü ve 4 hidrolik kontrol kanalı vardır. Her bir tekerlek bağımsız olarak kontrol edilir. Tüm yol koşullarında direksiyon güvenliği ve durma mesafesi korunur. Motorun ön tarafında, ön tekerlekten tahrikli araçlarda, ağırlığın büyük kısmı ön tekerleklerde toplanır. Fren kuvvetinin neredeyse %70'ini ön tekerlekler kontrol eder. Arka tekerlekler üzerinden sağlanan geriye kalan %30'luk fren kuvveti aracın stabilitesinin korunması için oldukça önemlidir. Farklı yol yüzeylerinde arka aks üzerindeki tekerleklerde hız farkının neden olduğu savrulma momenti aracın dengesinin bozulmasına neden olabilir. Bu nedenle, 4 kanallı ABS'ye sahip araçların çoğunda aracın dengesini korumak için arka tekerleklerde düşük mantık seçimi bulunur. 4 Sensörlü, 3 Kanallı tip 4-Sensörlü, 3-Kanallı ABS tipinde, 2 kanal ön tekerleği kontrol ederken üçüncü kanal arka aks üzerindeki tekerlekleri kontrol etmek için kullanılır. Ayrıca, arka tekerlekler, düşük kontrol mantığı seçimi kullanılarak kontrol edilir. 3 Sensörlü, 3 Kanallı tip Ön tekerlekler bağımsız olarak kontrol edilir; fakat arka tekerlekler tek tekerlek hız sensörü (ör. diferansiyel halka dişlisi) tarafından kontrol edilir. Kaynak: KİA, Fre

50 ABS Çalısması

51 ABS sistemi fren mesafesini kısaltır mı? ABS fren sistemi, fren mesafesini azaltan bir yapıda çalışmamaktadır. Frenleme sırasında tekerlek hız müşirlerinden gelen sinyali ABS kontrol grubu değerlendirir/hesaplar ve buna göre fren basıncının ayarlamasını yapar. Böylece tekerleklerin bloke olmadan (dönerek) yavaşlamasını veya durmasını sağlar. Bunun sonucunda aracın şerit içinde doğrusallığı bozulmaz ve güvenli bir frenleme sağlanmış olur.
 otomatik olarak etkinleştirilir.")
52 ABSplus ya da Offroad-ABS Offroad ABS olarak da bilinen ABSplus, ABS kontrol ünitesine dâhil özel bir programdır. Bu program, aşırı zorlu arazi kullanımlarda (özellikle 5 km/h den düşük hızlarda ve orta diferansiyel kilitli durumda iken) otomatik olarak etkinleştirilir. Offroad-ABS sistemine bağlı tekerlekler, sistem fren basıncını azaltmadan önce kısa bir süre bloke durumda kalmakta ve bu sayede tekerleğin önünde biriken zemin kaplama malzemesinden (örneğin çakıl ya da kum) küçük bir kama oluşturmaktadır. Bu kama, ekstra bir yavaşlatıcı etki ile fren performansını arttırır. Araç bu esnada hem yönlendirebilirliğini korur hem de belirgin oranda daha kısa fren mesafesi sunar.

53 ÖZET Anti blokaj fren sistemi (ABS), tam frenleme anında veya kaygan zeminde tekerleklerin bloke olmasını önleyerek aracın kontrol edilebilir durumda kalmasını sağlar. Özellikle ön tekerleklerin bloke edilmesi sonucunda yanal yönlendirme kuvvetleri bu tekerleklere aktarılamaz ve bu nedenle araç kontrol edilemez duruma gelir. ABS kontrol ünitesi, böyle bir durumun yaşanmaması için sensörler aracılığıyla tekerlek devir sayılarını sürekli olarak takip eder. Tekerleklerden birinin bloke olma riski söz konusu olduğunda, anti blokaj fren sisteminin kontrol ünitesinde bulunan bir solenoid valf, ilgili tekerleği yeniden serbest bırakmak amacıyla bu tekerlekteki fren basıncını düşürür. Ardından, frenleme etkisinin devam edebilmesi için basınç yeniden blokaj sınırına kadar arttırılır ve bu döngü bloke olma riski devam ettiği süre boyunca tekrar eder. Bu sayede, aracın dengesi korunur ve direksiyon hakimiyeti muhafaza edilir.

54 Reading Text: ABS antilock braking systems for passenger cars ABS antilock braking systems are closed-loop control devices within the braking system which prevent wheel lock-up during braking and, as a result, retain the vehicle's steerability and stability. The main ABS components are: Hydraulic modulator, wheel-speed sensors, and the ECU for signal processing and control and triggering of the signal lamp and of the actuators in the hydraulic modulator. There is a more or less sharp drop in the coefficient of friction µhf, depending upon the shape of the slip curve. The resulting excess torque causes the wheel to lock-up very quickly (when braking without ABS); this is expressed as a sharp increase in wheel deceleration. The wheel-speed sensors monitor the motion of the wheels. If one of the wheels shows signs of lock-up, there is a sharp rise in peripheral wheel deceleration and in wheel slip. If these exceed defined critical values, the controller sends commands to the solenoid-valve unit to stop or reduce the buildup of wheel-brake pressure until the danger of lock-up has passed. The brake pressure must then be built up again in order to ensure that the wheel is not underbraked. During automatic brake control, it is constantly necessary for the stability or instability of the wheel motion to be detected, and the wheel must be kept in the slip range with maximum braking force by a succession of pressure-buildup, pressurereduction and pressure-holding phases.

55 Reading Text: Disturbances in the closed control loop The ABS system must take the following disturbances into account: Changes in the adhesion between the tires and the road surface caused by different types of road surface and changes in the wheel loadings, e.g. when cornering, Irregularities in the road surface causing the wheels and axles to vibrate, Out-of-roundness, brake hysteresis, brake fading, Variations in the pressure input to the master cylinder caused by the driver's brake-pedal actuation, Differences in wheel circumferences, for instance when the spare wheel is fitted. Criteria of control quality The following criteria for control quality must be fulfilled by efficient antilock braking systems: Maintenance of driving stability through provision of sufficient lateral guiding forces at the rear wheels. Maintenance of steerability through provision of adequate lateral guiding forces at the front wheels. Reduction in stopping distance as opposed to braking with locked-up wheels through optimum utilization of the adhesion between tires and road. Rapid matching of the braking force to different adhesion coefficients, for instance when driving through deep water or driving over patches of ice or hard snow. Guaranteeing low braking-torque control amplitudes to prevent vibrations in the running gear. High level of comfort due to silent actuators and low feedback through the brake pedal.
 microcomputers. These speeds are used to estimate a vehicle reference speed.")
56 Reading Text: ABS - Electronic control unit (ECU) The ECU's input stages convert the incoming sinusoidal signals from the wheelspeed sensors into square-wave signals. The wheel speeds are calculated from the frequency of the square-wave signals by (redundant) microcomputers. These speeds are used to estimate a vehicle reference speed. The brake slip for each wheel is calculated using this reference speed and the individual wheel speed. If a wheel has a tendency to lock, this is determined from the "wheel-acceleration" and "wheel-slip signals". In such a case, the microcomputer energizes (via the ECU output stages) the solenoids of the pressure-modulation valves which control the brake pressure in the individual wheel-brake cylinders. The ECU contains a comprehensive program for the detection of faults throughout the entire antilock system (wheel-speed sensors, ECU, pressure-modulation valves, wiring harness). If a fault is detected, the ECU switches off the defective part of the system and stores a code detailing the faulty signal path. That code can be retrieved by a service technician with the aid of the warning lamp (flashing signal) or using an intelligent testing device (e.g. personal computer) via a standardized serial interface. The ECU's of some European ABS manufacturers include not only the ABS function but also functions for TCS traction control and in some cases for cruise control (see also TCS traction control) and in some cases for cruise control. The most important factor is that depending upon the model, the ECU automatically configures itself to the required function. In other words, if the vehicle concerned is only ABS-equipped, the ECU only carries out the ABS function; if the vehicle has TCS components the ECU also controls wheel slip automatically.

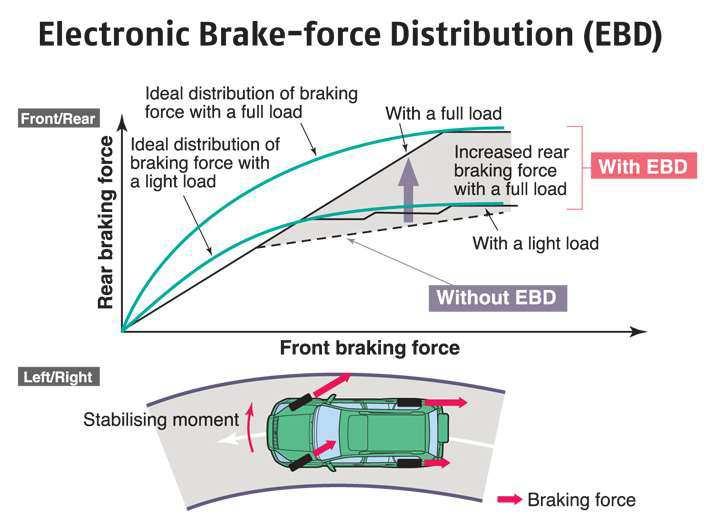
57 ELEKTRONİK FREN GÜÇ DAĞITIMI (Electronic Brake Force Distribution) EBD Electronic Brake Force Distribution (Elektronik Fren Kuvveti Dağıtım Sistemi) ifadesinin kısaltılmasıdır. Frenleme esnasında araç üzerinde ileri yönde bir kuvvet oluşmaktadır. Süspansiyon sistemi üzerine etki eden bu kuvvet, aracın ön kısmının yere oturmasına ve arkasının ise havaya kalkmasına neden olmakta, yani ön lastikler üzerindeki yük artarken arka lastikler üzerindeki yük azalmaktadır. Frenleme ne kadar sert olursa ön/arka tekerlekler arasındaki bu yük farkı da o nispette artacaktır. Bu da, fren basıncı her iki aksa aynı oranda dağıtıldığında arka tekerlekler, üzerlerindeki düşük yük nedeniyle ön frenlerden daha önce kızaklayacaklar; ya da arka aks ABS donanımı daha erken devreye girecek demektir. İşte EBD sistemi fren basıncını, bu yük dengesizliğini giderecek şekilde ön ve arka akslara dağıtmaktadır. Yani sert frenleme durumunda ön aksa daha çok arka aksa daha az fren gücü yollamaktadır. Bu sayede arka tekerleklerin kızaklama ihtimali azaltılmış olmaktadır. Ref: Otoguncel EBD sisteminin faydaları: Durma kabiliyeti geliştirilir. Viraj alırken, frenleme yaparken araç stabilitesi artar.

58 EBD li ABS Sistemi EBD li ABS deki EBD harfleri, Elektronik Fren Güç Dağıtımı (Electronic Brake Force Distribution) ifadesinin kısaltılmışıdır. Klasik ABS fonksiyonuna ilave olarak, aracın durumuna uygun frenleme kuvveti, aracın ön ve arka tekerlekleri ile sağ ve sol tekerleklerine ABS fren kontrol ünitesi kullanılarak uygulanır. Kaynak: ABS & NVH, Toyota.


59 Aşağıdaki kriterler yerine getirilinceye kadar, EBD işlevi devreye girmez: Aracın sürüş hızı 50 km/h'nin üzerinde olmalıdır. Kontrol modülü, fren sivicinden frenin uygulandığını belirten sinyal alır. Geciktirme kuvveti 0,25g'den büyük olmalıdır. Ön ve arka tekerlekler arasındaki ilgili kayma belirtilen değerden büyüktür. Bu kriterler yerine getirildiğinde, arka tekerlek giriş valfleri kapanır ve EBD işlevi ilgili kaymayı 3 km/h'nin altında tutabilmek için devreye girer. EBD ayarlaması sırasında tekerleklerin herhangi birinde kilitlenme eğilimi görülürse, kontrol modu normal ABS ayarına geçer. EBD Uyarı Lambası Kontrolü: EBD uyarı lambası, EBD'nin kendi kendine test ve arıza durumunu gösterir. Ancak, park freni sivici devreye sokulduğunda ya da fren hidroliği seviyesi düşük olduğunda, EBD işlevlerinden bağımsız olarak EBD uyarı lambası daima yanar. EBD uyarı lambası aşağıdaki durumlarda yanar: Kontak anahtarı ON (AÇIK) konumuna getirildikten sonra başlatma aşamasında (3 saniye boyunca sürekli) Park freni sivici ON (AÇIK) konuma getirildiğinde veya fren hidroliği seviyesi düşük olduğunda, EBD fonksiyonu bozulduğunda, Arıza teşhis modu esnasında, Konektör, bağlantısından ayrıldığında, Kaynak: KİA, Fre
60

61

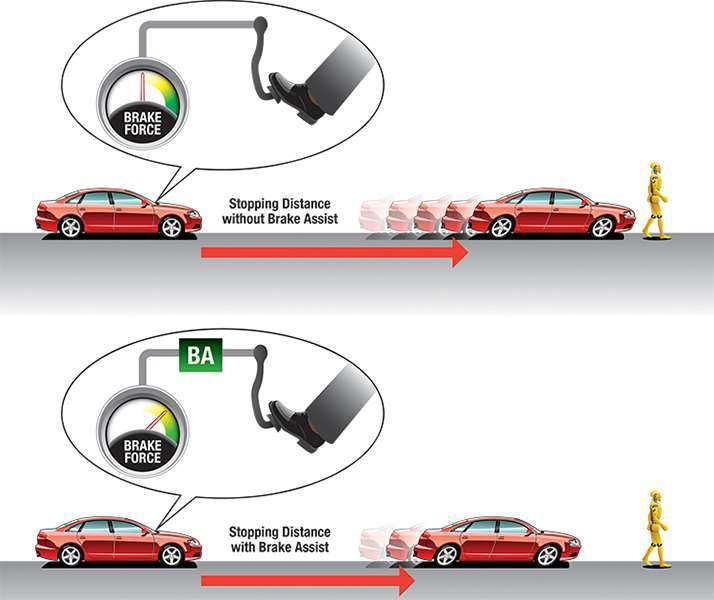
62 BA (Brake Assist - Fren Destek Sistemi) Bazen, araç sürmeye alışık olmayanlar veya alışık olsa da kolayca paniğe kapılan kişiler, acil bir durumda frene yeteri kadar sert basamadıkları için fren sisteminden maksimum performansı alamazlar. Kaynak: ABS & NVH, Toyota.

: Fren sistemine ilave bir donanım olan fren destek sisteminin (Brake Assist System BAS) İngilizce kısaltmasıdır.")

63 BA (Brake Assist - Fren Destek Sistemi) BA (Fren Destek Sistemi), ABS kumandasının içindeki basınç sensörünü kullanarak, fren pedalına basılma hızını ve basılma kuvvetini algılayan ve bilgisayar vasıtasıyla sürücünün acil durum frenleme isteğini hesaplayarak, fren sisteminden maksimum verim alınmasını sağlamak amacıyla frenleme kuvvetini artıran bir sistemdir. Ref: ABS & NVH, Toyota. BAS (Fren Destek Sistemi): Fren sistemine ilave bir donanım olan fren destek sisteminin (Brake Assist System BAS) İngilizce kısaltmasıdır. Fren sistemine ilave bir donanım olan fren destek sistemi de bunlardan biridir. BAS sistemi, tehlikeli durumlarda sürücünün hızla fren pedalına basarak harekete geçirdiği, fren yolunu kısaltan bir sistemdir. Bu sırada frenleme gücü arttırılır. BAS Plus: Çarpmalı kaza tehlikesinin oluşması durumunda radar sensörüne dayalı fren desteği sunan bir sistemdir. Eğer acil bir fren pozisyonunda hızlı bir şekilde frene basarsanız BAS Plus otomatik olarak fren gücünü trafik durumuna uygun bir değere ayarlar. Ref: Nenedir
64



65 BA aynı zamanda, şemadaki grafikte de gösterildiği gibi, desteğin miktarını durum gereğine göre ayarlayarak, frenlemenin mümkün olduğunca doğal yapılmasını sağlamak için, destek zamanını ve destek miktarını ayarlama özelliklerini de taşır. Kaynak: ABS & NVH, Toyota.


66 ASR (Anti Slip Regulation Çekiş Kontrol Sistemi) ASR nin teorisi temelde ABS ile aynıdır. Her iki sistemin de ana parametresi yol-lastik sürtünme katsayısıdır ve her ikisi de yol ile lastik arasındaki doğrusal kuvveti sürtünmenin izin verdiği seviyede tutarak lastiğin yol üzerinde kaymasını önlemektir. Frenleme esnasında bu kuvvet ileri yönde oluşmakta ve bu esnadaki bir kayma hadisesi kızaklama olarak adlandırılmakta idi. Patinaj ise tam tersine, gaza basıldığında tekerlek yüzeyinde oluşan geri yöndeki kuvvetin, yol ile lastik arasındaki sürtünme eşiğini aşmasıyla oluşan kayma durumudur. Frenleme ile arasındaki tek fark, yola etki eden kuvvetin yönü olduğundan, ABS de anlatılan prensipler burada da aynen geçerlidir. ASR sistemi, uygun olmayan yol koşullarında bile çekişi, hızlanmayı ve dik rampaları tırmanmayı kolaylaştırır ya da mümkün kılar. ASR sistemi normal koşullarda sürekli açık tutulmalıdır. Sadece tekerleğin patinaj yapmasının istendiği özel durumlarda ASR sistemi devre dışı bırakılabilir. ASR sadece elektronik gaz pedalı ile bağlantılı çalışır ve ABS nin kompanentlerini kullanır. ASR tekerlere giden güç akışını azaltarak lastiklerdeki patinajı azaltır. Ref: Otoguncel The system actually performs two functions: enhancing traction Maintaining vehicle stability (true tracking).
![ASR (Anti Slip Regulation Çekiş Kontrol Sistemi) [dvm.] ASR, ESP nin tamamlayıcı sistemi olup, fren ve motor kontrolü aracılığı ile her hızda çekişin optimum seviyede muhafaza edilmesini sağlar.](/docs-images/91/105360929/images/67-2.jpg "ABS sensörleri tarafından hesaplanan tekerlek devir sayısına göre sistem kayma derecesini hesaplar ve tutuşu tekrar temin etmek amacı ile iki ayrı kontrol sistemini devreye sokar.")
67 ASR (Anti Slip Regulation Çekiş Kontrol Sistemi) [dvm.] ASR, ESP nin tamamlayıcı sistemi olup, fren ve motor kontrolü aracılığı ile her hızda çekişin optimum seviyede muhafaza edilmesini sağlar. ABS sensörleri tarafından hesaplanan tekerlek devir sayısına göre sistem kayma derecesini hesaplar ve tutuşu tekrar temin etmek amacı ile iki ayrı kontrol sistemini devreye sokar. Aşırı güç talebi her iki çekiş tekerleğinin de patinaj yapmasına yol açtığı durumlarda -örnek olarak aquaplaning veya bozuk, karlı ve ya buzlu satıhlarda gaz verildiğinde-, jiklenin açılma açısını kısarak ve dolayısı ile hava girişini düşürerek motorun torkunu azaltır. Eğer tek bir tekerlekte patinaj meydana gelmiş ise -örnek olarak ivmelenme veya yükün dinamik değişimleri sonucunda virajın iç kısmında kalan tekerlek-, sürücünün fren pedalına müdahalesine gerek kalmadan otomatik olarak frenlenir. Çekiş kontrol sistemi; ASC+T (Automatic stability control + traction), TCS (Traction control system) ve TC (Traction system) gibi adlandırmalarla da kullanılmaktadır. Ref: Otoguncel
68
69 masrengineers.yoo7.com
 yol açarak aracın ilk kalkış/hızlanma yeteneğini ve direksiyon kontrol becerisini kaybetmesine neden olur.")
70 TCS/ASR (Patinaj/Çekiş Kontrol Sistemi) Bazen, ani kalkışlarda gaz pedalına fazla basıldığında ya da kaygan yüzeylerde yapılan ani hızlanmalarda üretilen aşırı tork, tahrik tekerleklerinin kaymasına (patinajına) yol açarak aracın ilk kalkış/hızlanma yeteneğini ve direksiyon kontrol becerisini kaybetmesine neden olur. Tekerlekler patinaja başladığında, TCS sistemi tahrik tekerlerine giden hidrolik basıncı kontrol ederek ve yakıt kesme kontrolüyle motor çıkış gücüne kumanda ederek, motor torkunu düşürür. Böylece, TCS sistemi, aracın ilk kalkış/hızlanma yeteneğini ve direksiyon hakimiyetini muhafaza etmesini sağlar. Kaynak: ABS & NVH, Toyota.

71 Çekiş kontrol sistemi, çalıştırma ya da hızlanma esnasında aşağıdaki durumlarda tekerleğin kaymasını önleyebilmelidir: Bir veya iki taraftaki şerit kaygan olduğunda Araç buzla kaplı park alanları ve otoban banketlerinde hareket ederken Viraj alırken hızlanma esnasında Yokuşta çalıştırırken Çekiş kontrol sistemi aşağıdaki durumlara da müdahale etmelidir: Tekerlek kaydığında, tıpkı kilitlenmede olduğu gibi, iletebileceği yanal kuvvetler sınırlandırılır, araç dengesini kaybeder. Tekerleğin kayması ayrıca taban ve aktarma organları gerilimini (örneğin diferansiyel üzerinde) artırır. Çekiş kontrolü her zaman otomatik olarak müdahale etmeye hazır olmalıdır. Çekiş kontrolü, viraj alma ve hızlanma sırasındaki kaymaları ayırt edebilmek için tahrik tekerindeki kayma oranlarını kullanır. Kaynak: KİA

72 Kaygan yüzeyde aracı çalıştırırken, aşağıdakiler oluşur: İlk önce sürtünmesi en düşük tahrik tekerleği dönmeye başlar. Tekerlek dönmesi 8.5 km/h'ye ulaştığında, TCS modülasyonu dönen tekerleğe fren uygulamaya başlar. Tekerleğe fren uygulandıktan sonra yol tutuşu devam eden diğer tekerleğe ek çekiş kuvveti aktarılır. TCS sistemi tahrik edilen tekerleklerin kaymasını fren torku kontrolü yoluyla engeller ve hızlanma performansını ve otomobilin stabilitesini artırır. Hızlanma sırasında tahrik edilen tekerleklerden birisi aşırı motor torkunun neden olmasıyla dönme eğilimi gösterirse, tekerlek silindirindeki basınç dönmeyi önlemek için artırılır. Dönme eğilimi tekerlek hız sensörleri tarafından tespit edilir. ÖRNEK UYGULAMA: KIA, iki tip çekiş kontrol sistemi sunar. Fren müdahaleli çekiş kontrol sistemi (BCTS) kayan tekerleklere birbirinden bağımsız frenleme uygulayarak çekişi artırır. Tam çekiş kontrol sistemi (FCTS) aynı şekilde çalışır; ancak, tekerlek kayması azaltılamazsa ek olarak motor torkunu da azaltır. Kaynak: KİA
 / Güç Aktarma Organları Kontrol Modülüne (PCM) daha fazla tekerlek dönüşünü önleyebilmek için motor torkunu sınırlandırma")
73 Kaynak: KİA Tam Çekiş Kontrol Sistemi (FTCS) olan araçlar: Yol yüzeyindeki sürtünme yeterli değilse, diğer tekerlek de dönmeye başlayabilir ve 6.5 km/h'ye ulaşınca TCS/ABS kontrol ünitesi, Motor Kontrol Modülüne (ECM) / Güç Aktarma Organları Kontrol Modülüne (PCM) daha fazla tekerlek dönüşünü önleyebilmek için motor torkunu sınırlandırma talebi gönderir. Modülasyondan önce tekerlek dönüşü için izin verilen üst sınır ayarlanır, araç hızı 22 km/h'ye ulaşıncaya kadar yavaş yavaş azalır, daha sonra motor torku sınırlaması ve fren uygulaması için tekrar artar. Çalışma sırasında sportiflik hissi verebilmesi için tekerleğin belirli bir değerde dönmesi kabul edilebilir, ayrıca koşullar gerektirdiğinde tekerleklerin daha sabit bir yüzeye gömülmesini sağlar. Fren diski aşırı sıcaklık tespit mantığı Fren sıcaklık mantığı, TCS müdahalesi sırasında tahrik edilen tekerleğin freninin aşırı ısınmasını önlemek için uygulanır. Fren diski sıcaklığı matematiksel bir modelle tahrik edilen her bir tekerlek için ayrı ayrı hesaplanır. Kontak açıldıktan sonra, hesaplama 30 C ile başlar ve sonra TCS müdahalesi esnasında uygulanan fren süresine göre tahrik edilen her bir tekerlek için disk sıcaklığını hesaplar. Hesaplanan sıcaklık 400 C'nin üzerindeyse, TCS işlevi bu tekerlek üzerindeki TCS kontrolünü geçici olarak devreden çıkartır. Hesaplanan sıcaklık 250 C'in altına düşünce TCS işlevi tekrar devreye girer. Aşırı ısınma tespit edilmişse, çekiş kontrol sistemi ünitesi (TCSCU) bir DTC Frenin aşırı ısınması" kaydeder. Bu DTC sadece tarama cihazı kullanılarak silinebilir.

74 Kaynak: KİA Tam Çekiş Kontrol Sisteminde Motor Torkunun Hesaplanması ECM (Motor Kontrol Modülü) / PCM (Güç Aktarma Organları Kontrol Modülü) mevcut hava kütlesini ve gaz kelebeği konumunu motor tork bilgisine dönüştürür. Bu bilgi CAN-Bus'a iletilir. TCS/ABS kontrol modülü, motor torku ile ilgili bu bilgiyi mevcut tahrik tekerleği torkunu hesaplamak ve sistemdeki arızaları tespit etmek için kullanır. TCM (Şanzıman Kontrol Modülü), dişli oranı ve vites değiştirme bilgilerini CAN-Bus'a yerleştirir. Düz şanzımana sahip araçlarda vites oranı motor ve araç devrinin dışında hesaplanır. TCS/ABS kontrol modülü, motor torku ve seçilen vites ile ilgili bilgileri kullanarak tahrik tekerleği torkunu hesaplayabilir. Bu, uygulanan fren büyüklüğünü ve motor tork sınırını hesaplamak için kullanılır. Motor tork bilgisi hatalıysa, DTC ayarlanır ve TCS işlevi devre dışı bırakılır. TCS/ABS kontrol ünitesi, CAN-Bus aracılığıyla ECM/PCM'den mevcut motor devir bilgisini alır. Kontrol ünitesi, bu bilgiyi tahrik tekerleğinin mevcut torkunu hesaplarken kullanır. Motor toku ve mevcut dişli oranı biliniyorsa, kontrol ünitesi tahrik tekerleği torkunu hesaplayabilir. TCS modülasyonu esnasında fren/motor torku sınırlandırmasının büyüklüğünü hesaplamak için tahrik tekerleği torku kullanılır. Motor çalışırken ECM/PCM'den gönderilen motor devri verileri hatalıysa, DTC ayarlanır ve TCS işlevi devre dışı bırakılır.

75 Kaynak: KİA Gaz Pedalı Konumu: Pedal konum bilgisi CAN-Bus aracılığıyla ECM/PCM'den TCS/ABS kontrol ünitesine gönderilir. TCS/ABS modülü, pedal konum bilgisini TCS modülasyonunun çalışması için gereken tekerlek dönüşünü belirlemek için kullanır. Sistem, pedal konumunu sürücünün sportif beklentilerine cevap verebilecek ve pedala basıldıkça tekerlek dönüşünün artmasını sağlayacak şekilde ayarlar. Pedal konumu ile ilgili yanlış bir bilgi verilmesi durumunda, DTC ayarlanır ve TCS işlevi devre dışı bırakılır. Not: Mevcut ABS/TCS verisi üzerinden gaz pedalı girişi kontrol edilemez.

76 FTCS - motor torku talebi Motor torku -100 Nm ve +400 Nm arasında değişebilir. Negatif değerler motor frenlemesini gösterir. TCS/ABS kontrol ünitesi tork talebiyle birlikte bilgiyi ECM/PCM'ye gönderir. Bu bilgi CAN-Bus yoluyla iletilir. Talep +10 Nm ve +400 Nm arasında değişebilir. TCS modülasyonu devre dışındayken, talep 400 Nm olur. Bilgi tahrik tekerleklerine gereken torku sağlamak için ECM/PCM'de kullanılır. Tahrik tekerleklerinden birisi izin verilen tekerlek dönüş sınırını aşarsa, TCS/ABS kontrol ünitesi ECM/PCM'den daha düşük bir motor torku talep eder. ECM/PCM, bu tork azaltma talebini iki aşamada gerçekleştirir: 1. Ateşleme zamanını geciktirerek 2. Silindire giden yakıtı keserek (1 silindir-2 silindir...vb.) Kaynak: KİA
77 Kaynak: ABS & NVH, Toyota. TCS/ASR (PATİNAJ KONTROL SİSTEMİ)
.")
78 Reading Text: TCS Traction Control During standing-start and moving acceleration and under braking, the efficiency with which forces can be transferred to the road depends upon the traction available between tires and road surface. The adhesion/slip curves for acceleration and braking display the same basic pattern as each other (see illustration). The vast majority of acceleration and braking operations entail only limited amounts of slip, allowing response to remain within the stable range in the diagram where up to a certain point any rise in slip is accompanied by a corresponding increase in available adhesion. Beyond this point, further increases in slip take the cuves through the maxima and into the instable range, in which any further increase in slip will generally result in a reduction of adhesion. Under braking, this will result in the wheel locking within a few tenths of a second. Under acceleration, one or both of the driving wheels will start to spin more and more as the drive torque exceeds the adhesion by an ever increasing amount. ABS responds to the first case (braking) by inhibiting wheel lock. TCS reacts to the second scenario by holding acceleration slip within acceptable levels to prevent wheel spin. The system actually performs two functions: enhancing traction maintaining vehicle stability (true tracking).
 is replaced by the ETC electronic throttle control (electronic \"drive-by-wire\" accelerator or EGAS).")
79 Reading Text: ABS/TCS 2I (Bosch) To provide optimal closed-loop control of torque at the drive wheels, the mechanical connection between accelerator pedal and throttle valve (or pedal and injection-pump control lever on diesel engines) is replaced by the ETC electronic throttle control (electronic "drive-by-wire" accelerator or EGAS). A sensor converts the position of the accelerator pedal into an electrical signal, which the ECU then uses to generate a control voltage. A servomotor responds to this signal by repositioning the throttle valve (or injection-pump control lever on diesels); it then transmits a position report back to the ECU. Brief, simultaneous activation of the service brakes is employed to supplement the ETC (improved tractive performance via limited-slip effect). The standard ABS hydraulic modulator is expanded to include a TCS section, both to provide additional hydraulic energy for brake-force application and for switching to TCS operation. The ABS solenoid valves in the hydraulic modulator switch between three positions "pressure buildup", "maintain pressure" and "discharge" to regulate the flow of system pressure and furnish the pressure modulation required for rapid and precise control of braking force at the drive wheels. The ETC control unit, which is connected to the ABS/TCS control unit via an interface, takes over control of the throttle or the diesel fuel-injection pump control lever in order to control engine torque. On spark-ignition engines, system response is improved by retarding ignition timing to reduce the relatively extended delays encountered when engine torque is controlled exclusively with the throttle valve.

80 MSR (Engine drag torque regulation) MSR (Engine drag torque regulation Motor momenti ayarlayıcısı/düzenleyicisi), sürücünün kaygan zeminde aniden ayağını gazdan çekmesi durumunda tahrik tekerleklerinin kaymasını engeller. Motor kumanda ünitesi, tekerleklerin tekrar araç hızına uygun şekilde dönmesini sağlayacak ve araca hakim olunabilecek kadar, motor devrini kısa süreli olarak yükseltir. MSR motorun bütün devir bölgelerinde çalışır. Ref: Otoguncel


81 Reading Text: MSR engine drag-torque control The TCS unit installed in passenger cars can be expanded to include the MSR engine drag-torque control system. On slick road surfaces, a downshift or sudden throttle closure can cause excessive engine braking at the drive wheels. MSR responds to these conditions by gently adjusting the throttle-valve for slightly increased engine torque in order to reduce the braking forces and help maintain maximum vehicle stability. TCS traction-control for commercial vehicles This closed-loop traction-control system is integrated within the ABS control unit for shared use of ABS components such as wheel-speed sensors and pressure-control valves.


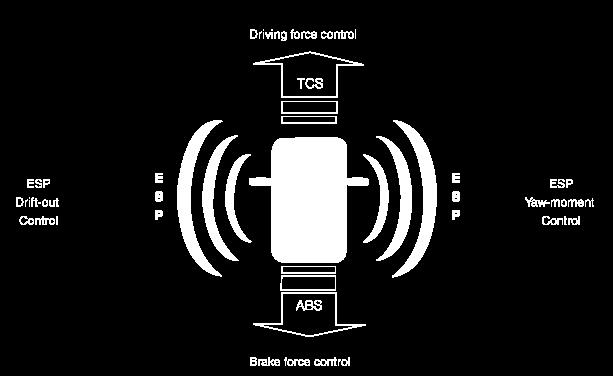
82 ESP/VSC (Araç Denge Kontrol Sistemi) ABS ve TCS sistemleri temel olarak frenleme ve hızlanma esnasında frenin istikrarlı çalışmasını ve aracın kararlılığını sağlamak için kullanılırken, VSC sistemi, dönüş esnasında aracın direksiyon ve yön istikrarını/stabilitesini kontrol eder. Sistem, ani direksiyon hareketlerini ve kaygan yüzeylerde yanal kaymaları saptar ve daha sonra motor çıkış gücünü ve her bir tekerleğe uygulanan fren gücünü en yüksek seviyede kontrol ederek, ön tekerlerin ve arka tekerlerin kaymasını azaltmaya çalışır. Fren kontrol metodu, aracın çekiş tipine göre değişiklik gösterir. Kaynak: ABS & NVH, Toyota.
83
84

85 Kaynak: KİA Elektronik Stabilite Programı (ESP), tüm sürüş koşulları altında aktif güvenliği artırır. Özellikle viraj alma esnasında veya başka bir deyişle yanal kuvvetler devredeyken, ESP, aracı dengeler ve şeritte güvenli bir şekilde tutar. ABS ve TCS sadece boylamasına yönde etki eder. ESP, tehlikeli durumlarda gösterilen panik tepkiler gibi kritik sürüş koşullarını tespit eder ve frene veya gaz pedalına basmaya gerek kalmadan tekerleklerin ayrı ayrı frenlenmesi ve motor kontrolü müdahalesi ile aracı dengeler. ESP, sürücünün kapasitesinin çok ötesinde tepki gösterir ve frenlerin seçici uygulanmasıyla aracı doğru yönde otomatik olarak geri "yönlendirir". Başka bir deyişle, ESP, çok uç durumlarda bile aracın normal şekilde davranmasını sağlar. Patinaj yapmak veya kaymaya başlamak yerine araç, direksiyon simidinden gelen girişlere uyar ve sürücü, tam kontrolde kalır.

86 Kaynak: KİA

87 Viraj alırken, viraj alma kuvveti ile santrifüj kuvveti arasındaki ilişki: Araç virajı alırken santrifüj kuvveti virajın dışına doğru yönde etkili olur. Bu kuvvete karşı koyan viraj alma kuvveti lastiklerin oluşturduğu merkezcil kuvvet olarak çalışır. Santrifüj kuvveti ve viraj alma kuvveti sırasıyla dengelendiğinde, viraj alırken sürüş gerçekleşebilir. Araçta viraj alma kuvveti = santrifüj kuvveti konumu korunduğu sürece, araç dönüş stabilitesini koruyabilir. Viraj alma kuvvetleri yol yüzeyinin sürtünme katsayısı, lastiğin yol tutuşu, dönüş devri vb. faktörlere göre değişebilir. Bu iki faktör arasındaki ilişki aşağıdaki gibidir: Yol yüzeyinin sürtünme katsayısı; katsayı arttıkça viraj alma kuvveti de artar Lastiğin yol tutuş performansı; daha yüksek yol tutuş performansı viraj alma kuvvetini artırır Santrifüj kuvveti için, dönüş devri; Dönüş devri arttıkça santrifüj kuvveti de artar Merkezcil kuvvet, dairesel hareket sırası da cismi yörü gede tutan kuvvettir. Merkezcil kuvvet, hız vektörü ü üyüklüğü ü değiştir ez ancak yö ü ü değiştirir. Kaynak: KİA

88 Sürücü hareketi direksiyon açısı sensörü (örneğin sürücünün gitmek istemediği bir yer) ve basınç sensörü (örneğin sürücü fren pedalına basınca) tarafından ölçülür. Bu giriş değerleri yanal G ve savrulma oranı sensörlerinin sinyalleri ile karşılaştırılır. Aracın mevcut hareketi sürücü hareketi ile uyumlu ise, durum normal olarak değerlendirilir ve ESP devreye girmez. Aracın mevcut hareketi ve sürücü hareketi arasında geniş bir fark oluşmuşsa, durum istikrarsız sürüş konumu olarak değerlendirilir. Arkadan kayma durumunda, ESP-CM aracın dönüş yönünün tersinde negatif bir savrulma momenti oluşturur. Önden kayma durumunda, ESP-CM aracın dönüş yönünde pozitif bir savrulma momenti oluşturur. Savrulma momenti her bir tekerleğe ya da tekerleklere fren uygulayarak oluşturulur. Her bir tekerleğin fren kuvveti farklıysa, araç gövdesinde dönüş kuvveti (savrulma momenti) oluşur ve bu aracın sürüş yönünde dönmesini sağlar. Fazladan savrulma momenti (önden kayma) oluşturmak için, aşağıdaki fren uygulamaları gerçekleştirilmelidir: Arka iç tekerlek Ön iç tekerlek (belirli bir seviyeye kadar) Negatif savrulma momenti (arkadan kayma) oluşturmak için, aşağıdaki fren uygulamaları gerçekleştirilmelidir: Ön dış tekerlek Arka dış tekerlek (belirli bir seviyeye kadar) Kaynak: KİA


89 UNDERSTEER ve OVERSTEER electronic-stability-control.blogspot.com

90 Örnek: İstenilen savrulma oranı 20 derece/s iken savrulma oranı sensör çıkışı sadece 10 derece/s ise, bu araç hareketinin sürücünün istediği düzeyde dönüş gerçekleştiremeyerek önden kaymaya neden olduğu anlamına gelir. Önden kayma belirtisi tespit edildiğinde; ESP motoru tarafından üretilen hidrolik basınç savrulma momentini artırmak için arka iç tekerleğe gönderilirken aynı zamanda motor torku da azaltılır. Aksine, savrulma oranı sensör çıkışı istenilen savrulma oranından daha büyükse, bu aracın dönüş hareketinin sürücünün istediğinden fazla olması sonucunda arkadan kaymaya neden olduğu anlamına gelir. Arkadan kayma tespit edildiğinde, hidrolik basınç savrulma momentini azaltmak için ön dış tekerleğe gönderilir. / KİA


91 Elektronik Kontrol Ünitesi (ECU) Kontrol ünitesi, ESP ünitesine entegre bir parçadır. Her bir tekerlekteki tekerlek sensörü kontrol modülüne tekerlek hız sinyali gönderir. ECU'ya diğer ilgili ESP girişlerine şunlar örnek verilebilir: Savrulma oranı, Direksiyon Açısı Sensörü, Basınç Sensörü Akü devresinden sürekli bir güç beslemesi alan kontrol modülü 9 ve 16 V arasındaki çalışma voltajına göre tasarlanmıştır. Kontak açıldığında, kontrol modülüne güç verilir ve ESP uyarı lambası fonksiyon testinin bir parçası olarak yanar. Sistem iyi durumdaysa, lamba 3-5 saniye sonra sönecektir. ECU aynı zamanda ABS, TCS ve EBD işlevleriyle birlikte çalışır. Güvenlik kavramı fren fonksiyonları için her zaman önceliklidir. ESP valfleri hidrolik devreye her zaman frenleme yapılabilecek şekilde yerleştirilir. Kontrol modülü, iç fonksiyonlarını ve diğer ESP/ABS/TCS sistemi parçalarını izler. Kontrol modülü içerisinde dahili bir arıza olursa, arıza teşhis kodu oluşur; ABS, TCS ve ESP uyarı lambası yanar ve ESP/ABS/TCS sistemi devre dışı bırakılır. Not: Kontrol modülüne dokunmadan önce, mutlaka üzerinizdeki statik elektriği boşaltın ve terminal pimlerine dokunmayın. / Kaynak: KİA Kaynak: ABS & NVH, Toyota.

92 Savrulma Oranı ve Yanal G-Sensörü Savrulma sensörünün amacı savrulmanın fiziksel etkilerini ölçmektir. Ayrıca, yanal hızlanmayı ölçebilmek için savrulma oranı sensörü içerisine bir cihaz yerleştirilmiştir. Bu cihaza Yanal G-Sensörü adı verilir. Not: Sensör, sarsıntılı hızlanmaya karşı oldukça hassastır. Bu yüzden, gövde tamirlerinde sensörün araçtan sökülmesi gerekir. Savrulma Oranı Sensörünün Ölçüm Prensibi: Otomobil dikey ekseni etrafında dönerken bu çatalların titrettiği düzlem değişir. Bu düzlem değişikliği elektronik olarak değerlendirilir. Savrulma oranı sensörü, normal salınım kütleleri dışında koriyolis etkisinin tespitine dayanır. / Ref.: Kia Coriolis kuvveti, dönen bir platformun merkezinden karşı tarafına yürümeye çalışan biri tarafından anlaşılabilir. Yürümek istediği tarafa doğru dik açıyla itildiğini görür. Benzer şekilde, dönen yer kürenin yüzeyi üzerinde hareket eden hava, kuzey yarım kürede hareket yönünün sağına, güney yarım kürede soluna saptırır. Bu saptırma gücüne coriolis kuvveti denir. Fransız matematik ve fizikçisi, Gustave Gaspard Coriolis ( ) onuruna atfen bu ad verilmiştir.

93 Kaynak: KİA Direksiyon açısı sensörü Direksiyon açısı sensörünün amacı sürücü hareketlerini algılamaktır. Direksiyon açısı sensörü çıkışı savrulma oranı sensörü çıkışı ile karşılaştırılarak HECU'nun önden veya arkadan kayma durumunu tespit edebilmesini sağlar. İki farklı türde direksiyon açısı sensörü kullanılır. Bunlar ışık kesme tipi ve anizotropik manyeto direnç (AMR) tipi olarak adlandırılır. AMR Tipi Direksiyon Açısı Sensörü Kalibrasyonu Direksiyon simidi sensörü değiştirildikten sonra, yeni sensör ayarlanmalıdır. Direksiyonda tamir işlemi gerçekleştirildiğinde veya sensör söküldüğünde de bu işlem gerçekleştirilir. Prosedür Direksiyon simidinin ve ön tekerleklerin düz ve karşıya bakacak şekilde olduğunu kontrol edin. Azami tolerans değeri +/-5 'dir. Kontak anahtarını tekrar ON - OFF - ON konumuna getirin. Tarama cihazını bağlayın. Direksiyon açısı sensörünü belirleyin.


94 Sapma oranı sensörü: Sapma oranı sensöründe, ses çatalı şeklinde, titreyen tipli bir oran giroskopu (gyro) kullanılmıştır. Her rezonatör, birbirine göre 90 dereceyle bir grup oluşturacak şekilde, bir titreşen kısmından ve bir tespit kısmından oluşur. Hem titreşen ve hem de tespit kısımlarına birer adet piezoelektrik seramik parça eklenmiştir. Piezoelektrik seramik parçaya mahsus bir özellik olarak; üzerine voltaj uygulanırsa bunu saptırır ve bu seramik parçaya saptırıcı bir dış güç uygulandığında ise bir voltaj üretir. Sapma oranını tespit etmek için, rezonatörün titreşen kısmına alternatif akım voltajı uygulanır, bu akım parçanın titreşmesine sebep olur. Daha sonra, sapma oranı, tespit kısmından piezoelektrik seramik parçanın sapma miktarı ve yönüne göre saptanır, ki bu rezonatör çevresinde türetilmiş olan koriolis etki (saptırıcı etki) gücünde oluşur. Kaynak: ABS & NVH, Toyota.

95 Kaynak: ABS & NVH, Toyota. TCS ve VSC aşağıdaki parçalardan oluşur. 1. ABS EKÜ sü 2. Fren kumanda grubu 3. Hız sensörü 4. Yavaşlama sensörü 5. Stop lamba anahtarı

 TCS OFF gösterge ışığı: TCS OFF (Kapalı) düğmesi ON (Açık) konumunda olduğunda TCS çalışması durur")
96 Gösterge Paneli (1) Fren sistemi uyarı ışığı (2) ABS uyarı ışığı (3) VSC uyarı ışığı: VSC veya TCS sisteminde bir arıza olduğu zaman sürücüyü uyarmak için bu lamba yanar. (4) Kayma gösterge ışığı: VSC veya TCS devreye girince bu ışık yanıp sönerek sürücüye haber verir. (5) TCS OFF gösterge ışığı: TCS OFF (Kapalı) düğmesi ON (Açık) konumunda olduğunda TCS çalışması durur ve bu ışık yanar. Kaynak: ABS & NVH, Toyota.

97 ESP Sivici ve Uyarı Lambası ESP/TCS işlevi ön göğüsteki yay yüklü siviç ile açılıp kapatılabilir. ESP işlevi kapatılınca, ana gösterge ünitesindeki ESP OFF (KAPALI) lambası yanacaktır. Sistem her yeni çalıştırmadan sonra genellikle aktiftir ve sadece ESP düğmesinin çalıştırılmasıyla devreden çıkarılır. Siviç, ESP kontrol modülüne ve yolcu bölmesi bağlantı bloğuna bağlıdır. Yolcu bölmesi bağlantı bloğu, akü voltajı (30) besler ve düğmeye basıldığında devre topraklanır ve mevcut duruma göre ESP işlevi devreye girer ya da devre dışı kalır. ESP Uyarı Lambası: ESP veya TCS kontrol devresinde ESPCM tarafından bir arıza tespit edildiğinde de ESP Kapalı uyarı lambası yanacaktır. ESP/TCS KAPALI Uyarı Lambası Kontrolü: ESP/TCS Uyarı Lambası, ESP/TCS sisteminin kendi kendine test ve arıza durumunu gösterir. ESP/TCS Uyarı Lambası aşağıdaki durumlarda yanar: Kontak anahtarı ON (AÇIK) konumuna getirildikten sonra başlatma aşamasında (3 saniye boyunca sürekli) Arıza nedeniyle ESP/TCS fonksiyonunun engellenmesi durumunda TCS düğmesi aracılığıyla ESP/TCS fonksiyonu devre dışı bırakıldığında Arıza teşhis modu esnasında Kaynak: KİA

98 ÖZETLER

99 KİLİTLENME ÖNLEYİCİ FREN SİSTEMİ (ABS) ABS sistemi frenleme esnasında tekerleklerin kilitlenmesini engeller. Bunun anlamı direksiyon hakimiyetinin korunması ve örneğin bir tehlikenin etrafından manevra yapmayı kolaylaştırmasıdır. Motor çalıştırıldıktan sonra, ABS sistemi yaklaşık 20 km/saat hızda kısa bir süre için kendi kendini test eder. Bu durum hem işitilebilir hem de fren pedalında darbeler halinde hissedilebilir. ABS sisteminden tam olarak faydalanabilmek için: 1. Fren pedalına tam kuvvetinizle basınız. Darbeler hissedilecektir. 2. Aracı seyir yönüne yönlendiriniz. Pedal üzerindeki baskıyı düşürmeyiniz. Not: Trafik olmayan bir alanda ve farklı hava şartlarında ABS sistemiyle fren uygulamaları yapınız. Kaynak: Volvo XC90 Kullanıcı El Kitabı

100 ABS Fren Sistemi ABS (Antilock Braking System), ani frenleme veya tehlikeli yol yüzeylerinde frenleme sırasında araç tekerleklerinin kilitlenmesini engellmek için tasarlanmıştır. Fakat ABS fren sistemi, tehlikeli ve aşırı manevralar nedeniyle ortaya çıkacak kazaları önleyemez. ABS fren sistemi çalışması sırasında, fren pedalında hafif titreşimler hissedilir ve motor bölmesinden de farklı bir ses gelir. Bu durumlar ABS nin çalışmakta olduğunu gösterir. Sistem, tekerlek sensörleri, fren hidroliği ve fren hattı, ABS hidrolik kontrol ünitesinden oluşmaktadır. Aşağıda sıralanan koşullarda, ABS fren sistemi olan araçların duruş mesafesi, bu sistem olmayan araçlardan daha uzun olabilir: Çakıllı veya karla kaplı yollarda Kar zinciri takılmış durumda Yüzeyi çukurlu, engebeli yollarda

101 ELEKTRONİK FREN KUVVETİ DAĞITIM SİSTEMİ - EBD Elektronik Fren Kuvveti Dağılımı sistemi (EBD), ABS sisteminin bütünleşik bir parçasıdır. EBD sistemi arka tekerleklere uygulanan fren kuvvetini kontrol ederek, daima mümkün olan en iyi frenleme kuvvetinin sağlanmasını garanti eder. Sistem fren kuvvetini ayarlarken fren pedalındaki darbeleri duyabilir ve hissedebilirsiniz. Uyarı: FREN ve ABS uyarı sembolleri aynı anda yanıyorsa, fren sisteminde bir arıza var demektir. Bu aşamada fren hidroliği haznesi normalse en yakın servise uğrayınız ve fren sistemi kontrolü yaptırınız. Fren hidroliği, fren hidrolik haznesinde MIN seviyeden daha düşükse, fren hidroliği doldurana dek aracı sürmeyiniz. Fren hidroliği kaybının nedeni araştırılmalıdır. Kaynak: Volvo XC90 Kullanıcı El Kitabı

102 Kaynak: Volvo XC90 Kullanıcı El Kitabı ACİL DURUM FREN YARDIMI EBA (Emergency Brake Assistance) Ani fren yapılması gerektiğinde, tam güçle frenleme derhal devreye girer. EBA fonksiyonu, frene ne kadar çabuk basıldığını tespit ederek, daha kuvvetli frenleme yapılıp yapılmayacağını algılar. Ayağınızı fren pedalından çekmeden fren yapmaya devam ediniz. Bu fonksiyon, fren pedalı üzerindeki baskı kalktığında, askıya alınır. Bu fonksiyon daima aktif konumdadır. Devre dışı bırakılamaz. Dikkat: EBA devreye girince fren pedalı her zamankinden biraz daha alçalır, fren pedalına gerektiği kadar basınız (tutunuz). Eğer fren pedalı bırakılırsa tüm frenleme kesilir.

103 DENGE VE ÇEKİŞ KONTROL SİSTEMİ DSTC (Dynamic Stability and Traction Control) Dinamik Stabilite ve Çekiş Kontrol sistemi, aracın çekişini geliştirir ve sürücünün patinajdan kaçınmasına yardımcı olur. Fren veya hızlanma esnasında sistem harekete geçince bir darbe sesi duyulabilir. Gaz pedalına basıldığında araç umulandan daha yavaş hızlanabilir. Aktif Sapma Kontrolü: Aracı dengelemek için ayrı ayrı her tekerlekteki tahrik ve fren kuvvetini sınırlandırır. Patinaj Kontrolü: Hızlanma esnasında tekerleklerin yol yüzeyinde patinaj yapmasını engeller. Çekiş kontrol sistemi: Düşük hızlarda devrededir ve tahrik gücünü patinaj yapan tekerlekten patinaj yapmayan tekerleğe aktarır. Uyarı: Normal sürüş koşullarında, DSTC sistemi aracın yol güvenliğini arttırır ancak bu, hızı arttırmak için bir gerekçe olarak kabul edilmemelidir. Virajlarda ve kaygan yüzeylerde giderken güvenlik için her zaman gerekli önemleri alınız. Kaynak: Volvo XC90 Kullanıcı El Kitabı
104 OKUMA METİNLERİ

105 Reading Text: The Electronic Stability Program ESP (vehicle dynamics control) system The Electronic Stability Program ESP (vehicle dynamics control) system is a closedloop control system which prevents lateral instability of the vehicle. It is integrated within the vehicle's brake system and drivetrain. While ABS prevents wheel lockup when braking and TCS prevents spin of the driven wheels, ESP prevents the vehicle from "pushing out" of the turn or spinning out of the turn when it is steered. Further to the advantages inherent in ABS and TCS, ESP improves the active driving safety in the following points: Provides the driver with active support, even in laterally critical dynamic situations. Enhances vehicle stability and tracking performance even in limit situations in all operating modes such as full braking, partial braking, coasting, accelerating, engine drag, and load shift. Enhances directional stability even during extreme steering maneuvers (panic reactions), resulting in a drastic reduction in the danger of skidding. Improved handling behavior also in limit situations. For the driver, this behavior becomes predictable as a function of his (or her) experience. The vehicle remains fully under control even in critical traffic situations. Depending upon the situation, even better utilization of the friction potential between the tires and the road when ABS and TCS intervene, and therefore improved traction and stopping distances in addition to improved steerability and stability.

106 Reading Text: When the vehicle moves off on a low-traction or µ-split (left/right variations in traction) surface, the wheelspin that accompanies excessive throttle will frequently be limited to a single drive wheel. Due to the low coefficient of friction at this wheel, only minimal tractive forces will be available to move the vehicle. The brake controller responds to this situation by applying braking pressure to the spinning wheel; this force is conveyed through the differential and acts as drive torque at the (still) stationary wheel. First, the ECU switches the TCS valve to the open position for initial braking at the spinning wheel. The control circuit then uses the ABS pressure-control valve to control the pressure at the wheel cylinder as a function of wheel behavior. The brake pressure is controlled in such a way that the driving wheels are synchronized. The result is a locking effect comparable to that provided by a mechanical limited-slip or locking differential. In order to achieve the same forward drive, however, the engine torque must be greater than required with a mechanical differential lock by an amount equivalent to the braking force applied by the TCS brake controller.

 Proper control of vehicle-handling dynamics by means of ESP Electronic Stability Program (previously known as VDC")
107 Reading Text: Engine-control circuit Notes: The ABS/TCS control unit consults both this signal and various other data such as wheel slip in calculating the torque reduction requirement to be implemented by the enginemanagement ECU. Servomotor the ABS/TCS control unit operates the servomotor directly. The ABS/TCS control unit compensates for the excess throttle. ABS and ESP hydraulics (Bosch) Proper control of vehicle-handling dynamics by means of ESP Electronic Stability Program (previously known as VDC Vehicle Dynamics Control) requires sufficiently rapid build-up of braking force in the brakes.

108 ESP (Elektronik Denge/Stabilite Programı) ESP (Electronic Stability Program), virajlardaki manevralar sırasında aracı dengede, yolda tutmak amacıyla tasarlanmıştır. ESP direksiyon açısını ve aracın gerçekte ne yöne gittiğini kontrol eder. Ayrıca aracı dengede tutabilmek için her tekere sürücü kontrolü dışında fren uygular ve motor yönetim sistemine müdahale eder. ESP güvenli sürüş uygulamalarının yerini tutmaz. Virajları makul hızlarda alma, yeterli bir güvenlik payı bırakma ve aracı kontrol etme hala sürücünün kontrolü altındadır. Özellikle kaygan yollarda yol tutuş problemleriyle ilgili olarak ESP nin sadece bir sürüş destek sistemi olduğu unutulmamalıdır. Değişik ebatlarda lastik ve/veya jant kullanımı ESP sistemi çalışmasında aksaklıklar oluşturabilir.
109 Reading Text: Networked Chassis

110 Networked Chassis In today s vehicles, the driver uses the steering wheel, gas pedal, and brake pedal as interfaces to directly operate the steering, powertrain, and braking systems, respectively. A combined control system which interprets the intention of the driver and adjusts itself accordingly has thus far only existed as part of certain applications, for example the ESCinitiated engine management intervention during traction control or yaw rate control. As individual systems develop and evolve toward computer-controlled external force systems, new chassis system applications result. On one hand, this is the result of attempts to develop additional, overarching functions which go beyond those of the individual systems. On the other hand, this is also the result of attempts to eliminate undesired interference between conflicting control loops which influence the same vehicle parameters simultaneously. An example of this is the yaw behavior, which can be influenced by all three chassis systems: steering, brakes, and suspension. Additionally, yaw can be affected by the powertrain (especially by controllable transfer cases). A holistic approach to the cause-and-effect chain is necessary in order to further optimize the chassis using systems which allow outside intervention. Developers of global chassis control systems should note that a high degree of interdependence exists between the functionality, software architecture, and electric/electronic architecture of the system. It is therefore especially important to organize the various functions and components according to a clear hierarchy which contains defined, uniform interfaces. In the absence of such an organizational structure, global chassis control quickly reaches a level of complexity that requires unjustifiable effort on the part of developers and applicators (Figure 1). The following example scenarios illustrate the advantages of a networked chassis application. Kaynak: Bernd Heißing Metin Ersoy (Eds.), Chassis Handbook Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives, 2011
![Fig. 1: An example networked chassis (shown here: the Global Chassis Control (GCC) system from ContiTeves) [26] Kaynak:](/docs-images/91/105360929/images/111-0.jpg "Bernd Heißing Metin Ersoy (Eds.")
111 Fig. 1: An example networked chassis (shown here: the Global Chassis Control (GCC) system from ContiTeves) [26] Kaynak: Bernd Heißing Metin Ersoy (Eds.), Chassis Handbook Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives, 2011

112 Stopping Distance: A Holistic Approach (Bütünsel Yaklaşım) The total stopping distance of a vehicle during a panic stop is made up of the reaction distance, which is the distance that the vehicle travels while the driver is reacting, the buildup distance, which is the distance that the vehicle travels during the transition from initial contact with the brake pedal to full braking, and the subsequent fully-braked stopping distance (Figure 2). Significant reductions to the braking distance can only be achieved when the components and processes involved are optimized together as part of a complete application. By combining the knowledge and technical possibilities of tire design, brake design, and suspension design, the reaction distance and the fullybraked stopping distance can be reduced to 10 to 15% below their current values in a panic stop situation [27]. Fig. 2: The three phases of a panic stop Kaynak: Bernd Heißing Metin Ersoy (Eds.), Chassis Handbook Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives, 2011
.")
113 Enhanced Electronic Stability Control (ESC II) A system based on the current vehicle dynamic control system ESC could be used to integrate a vehi le s steering and braking system. This integration would be especially advantageous during a panic stop on a road surface with varying coefficients of friction (μ-split). If the integrated system can control the active steering (using a superposition steering system such as ESAS, for example) as well (Figure 3), then the yaw moment resulting from the lateral variance in braking forces can be compensated by computer-controlled countersteer. In this case, the driver would continue to hold the steering wheel in the neutral position as in straightline braking. The driver s intended course for the vehicle is therefore represented by the position of the steering wheel. The rapid yaw moment compensation enabled by the steering intervention simultaneously allows an almost immediate buildup of brake pressure at the wheels, which enables the use of a modified brake force controller at the rear wheels. As a result, the braking distance on a μ-split surface is reduced significantly. Kaynak: Bernd Heißing Metin Ersoy (Eds.), Chassis Handbook Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives, 2011

114 Fig. 3: ESC II: ESC combined with active steering intervention and optional chassis intervention functions Kaynak: Bernd Heißing Metin Ersoy (Eds.), Chassis Handbook Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives, 2011

115 FREN SİSTEMLERİNDE BAZ) HESAPLAMALAR
116 Engine Model
117 Torque Converter Model
118 Transmission Model
119 Vehicle Dynamics Model


120 Statik Kütle Dağılımı 2500 libre = 2500 pound = 1133 kg 1 pound = 1 lb = 0,454 kg

121 Frenlemede Kütle Transferi Örnekteki transfer oranı %74 dür. Normalde olması gereken %60.

122 Frenlemede Kütle Transferi


123 Diske Etkiyen Kuvvet ve Momentler Taşıt Konstrüksiyonu A.G.Göktan 2001/2002

124 Fren İç Çevrim Oranının Değişimi Taşıt Konstrüksiyonu A.G.Göktan 2001/2002

125 Günümüzde kullanılan frenlerde μ = 0,3...0,4 arasında değerler almakta, balata yüzey basınçları ise p = N/cm 2 (maksimum 1200 N/cm 2 ) olmaktadır. ÖRNEK Tekerlek yükü Fz = 3000 N Tekerlek ile yol arasındaki tutunma katsayısı h = 1 çaplar oranı r B /r = 0,4 Fren yüzeyi sayısı z = 2 Balata ile disk arasındaki sürtünme katsayısı = 0,35 İzin verilen balata yüzey basıncı p = 800 N/cm 2 ise B = Fz. h bağıntısından maksimum taşınabilir fren kuvveti B = 3000 N ; M = B r ve M = U B r B bağıntılarından çevresel kuvvet U B = 7500 N, bunun için gerekli baskı kuvveti U B = z S B bağıntısı ile S B = N bulunur. p = S B /A B bağıntısından balata yüzey alanı AB = 13.4 cm 2 olup 37 x 37 mm 2 boyutlarında bir balata kullanılabilir. Bu durumda piston alanı A P = 8,23 cm 2 ( dp = 32.4 mm) ise S B = ph AP bağıntısı kullanılarak maksimum hidrolik basıncı için ph = 1300 N/cm 2 bulunur. Taşıt Konstrüksiyonu A.G.Göktan 2001/2002

126 Taşıt Konstrüksiyonu A.G.Göktan 2001/2002
 ts: sistem yüksel e süresi tv: tam frenleme süresi v0: aşla gıç hızı Taşıt Konstrüksiyonu A.G.")
127 Frenlemenin seyri tr: reaksiyon süresi ( s ) tb: tahrik yüksel e süresi ( s ). ta: cevap süresi (0.04 s ) ts: sistem yüksel e süresi tv: tam frenleme süresi v0: aşla gıç hızı Taşıt Konstrüksiyonu A.G.Göktan 2001/2002

128 Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket eden bir taşıtın frenlenmesi süresince taşıtın kinetik ve potansiyel enerjileri frenlerdeki sürtünmelerden dolayı termal enerjiye çevrilir. 1 hızından 2 hızına yavaşlayan bir taşıt için frenleme enerjisi E f ; E f = (1/2).m.( ) + (1/2).I.( ) [Nm] şeklindedir. Burada; I : Dönen parçaların kütle atalet momenti, [kgm 2 ] m : Taşıtın kütlesi, [kg] 1 : Taşıtın ilk hızı, [m/s] 2 : Taşıtın son hızı, [m/s] 1 : Frenleme başlangıcında dönen parçaların açısal hızı, [1/s] 2 : Frenleme sonunda dönen parçaların açısal hızı, [1/s] Eğer taşıt frenleme sonucunda duruyorsa 2 = 2 = 0 olacak ve denklem aşağıdaki şekle dönüşecektir. E (1/2).m. (1/2).I. [Nm] 2 2 f 1 1 AD, Doktora Tezi
![1 = 1 /r 1 olduğu hatırlanırsa; E (1/2).m.[1 I/(m.r )]. (1/2).m.k. 2 2 2 f 1 1 şeklinde yazılabilir. Burada; k : Dönen kütleler için düzeltme faktörü (k 1+ I/m.](/docs-images/91/105360929/images/129-2.jpg "r 2 ) r : Dinamik lastik yarıçapı, m Binek otomobilleri için k yüksek viteslerde 1,05 ile 1,15, düşük viteslerde 1,3 ile 1,5 arasında bir değer olarak alınır.")
129 1 = 1 /r 1 olduğu hatırlanırsa; E (1/2).m.[1 I/(m.r )]. (1/2).m.k f 1 1 şeklinde yazılabilir. Burada; k : Dönen kütleler için düzeltme faktörü (k 1+ I/m.r 2 ) r : Dinamik lastik yarıçapı, m Binek otomobilleri için k yüksek viteslerde 1,05 ile 1,15, düşük viteslerde 1,3 ile 1,5 arasında bir değer olarak alınır. Kamyonlar için yüksek viteslerde 1,03 ile 1,06, düşük viteslerde 1,25 ile 1,6 arasında bir değerdir [87]. AD, Doktora Tezi
![Eğer taşıt yavaşlayarak yokuş aşağı iniyorsa, disk ve balata ikilisi hem potansiyel hem de kinetik enerjiyi ısı enerjisine dönüştürecektir [Şekil A1].](/docs-images/91/105360929/images/130-2.jpg "Bu durum için enerjinin korunumu kanunu yazılacak olursa; E m.g.h 1/2.k.m.( ) [Nm] 2 2 f 1 2 Sabit hızda sürekli frenleme için (yani yokuş aşağı sabit hızla iniş) denklem (A.")
130 Eğer taşıt yavaşlayarak yokuş aşağı iniyorsa, disk ve balata ikilisi hem potansiyel hem de kinetik enerjiyi ısı enerjisine dönüştürecektir [Şekil A1]. Bu durum için enerjinin korunumu kanunu yazılacak olursa; E m.g.h 1/2.k.m.( ) [Nm] 2 2 f 1 2 Sabit hızda sürekli frenleme için (yani yokuş aşağı sabit hızla iniş) denklem (A.λ) da 1 = 2 olarak alınırsa; Ef m.g.h [Nm] şekline dönüşür. Burada; gμ Yerçekimi ivmesini, [m/s 2 ] hμ Yüksekliği, [m] ifade eder. Şekil A1: Eği li yolda ki etik ve pota siyel enerji [87] AD, Doktora Tezi


131 Taşıt Konstrüksiyonu, A.G.Göktan 2001/2002 Tekerleğe bir MT momenti etki ediyorsa, ivmesiz harekette tekerlek çevresel kuvveti Fx = MT /r - FR bulunur. MT / r oranına tekerlek çeki kuvveti denir. Tekerlek çevre kuvveti = Tekerlek çeki kuvveti Yuvarlanma direnci Ancak burada bulunan çevre kuvveti sınırsız olmayıp, zeminle lastik tekerlek arasındaki kuvvet bağlantısına bağlıdır. ile kuvvet bağlantı katsayısını gösterirsek,

132 Kayma Taşıt Konstrüksiyonu A.G.Göktan 2001/2002



133 Basic closed-loop control process On initial braking, the brake pressure is increased; the brake slip rises and at the maximum point on the adhesion/slip curve, it reaches the limit between the stable and unstable ranges. From this point on, any further increase in brake pressure or braking torque does not cause any further increase in the braking force FB. In the stable range, the brake slip is largely deformation slip, it increasingly tends towards skidding in the unstable range. Brake slip = (υ F υ R )/υ F % Wheel speed υ R = r ω Braking force F B = HF G Lateral force F S = S G HF Coefficient of friction, S Lateral-force coefficient. Adhesion/slip curve The curve shape differs greatly as a function of road surface and tire condition. There is a more or less sharp drop in the coefficient of friction HF, depending upon the shape of the slip curve. The resulting excess torque causes the wheel to lock-up very quickly (when braking without ABS); this is expressed as a sharp increase in wheel deceleration
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Fren Sistemi Genel ABS, BAS, EBD, ASR/TCS, MSR, ESP/VSC Abdullah DEMİR, Dr. PASSIVE SAFETY Passive Safety Devices Passive safety features
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Fren Sistemi Genel ABS, BAS, EBD, ASR/TCS, MSR, ESP/VSC Abdullah DEMİR, Dr. PASSIVE SAFETY Passive Safety Devices Passive safety features
Disk frenler, kuvvet iletimi, konstrüksiyon, kampanalı frenler, kuvvet iletimi, konstrüksiyon, ısınma, disk ve kampanalı frenlerin karşılaştırılması
 Disk frenler, kuvvet iletimi, konstrüksiyon, kampanalı frenler, kuvvet iletimi, konstrüksiyon, ısınma, disk ve kampanalı frenlerin karşılaştırılması Hidrolik Fren Sistemi Sürtünmeli Frenler Doğrudan doğruya
Disk frenler, kuvvet iletimi, konstrüksiyon, kampanalı frenler, kuvvet iletimi, konstrüksiyon, ısınma, disk ve kampanalı frenlerin karşılaştırılması Hidrolik Fren Sistemi Sürtünmeli Frenler Doğrudan doğruya
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Fren Sistemi Genel ABS, BAS, EBD, ASR/TCS, MSR, ESP/VSC Abdullah DEMİR, Yrd. Doç. Dr. PASSIVE SAFETY Passive Safety Devices Passive safety
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ AKTİF EMNİYET SİSTEMLERİ Fren Sistemi Genel ABS, BAS, EBD, ASR/TCS, MSR, ESP/VSC Abdullah DEMİR, Yrd. Doç. Dr. PASSIVE SAFETY Passive Safety Devices Passive safety
Hasan Esen ZKÜ FEN BİL. ENST. MAKİNE EĞT.BL. ÖĞRENCİSİ 2000 0281 07 007
 Hasan Esen ZKÜ FEN BİL. ENST. MAKİNE EĞT.BL. ÖĞRENCİSİ 2000 0281 07 007 I.GİRİŞ Motorlu araç frenleri alanındaki gelişme, taşıtları değişik sürüş koşullarında mümkün olan en iyi şekilde frenleyebilen verimli,
Hasan Esen ZKÜ FEN BİL. ENST. MAKİNE EĞT.BL. ÖĞRENCİSİ 2000 0281 07 007 I.GİRİŞ Motorlu araç frenleri alanındaki gelişme, taşıtları değişik sürüş koşullarında mümkün olan en iyi şekilde frenleyebilen verimli,
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 11 1.3 TAŞITLARIN SINIFLANDIRILMASI... 14 1.4 TAŞITA ETKİYEN KUVVETLER... 15 1.5
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 11 1.3 TAŞITLARIN SINIFLANDIRILMASI... 14 1.4 TAŞITA ETKİYEN KUVVETLER... 15 1.5
GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ
 GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket
GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket
İÇİNDEKİLER. Bölüm 1 GİRİŞ
 İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
İÇİNDEKİLER Bölüm 1 GİRİŞ 1.1 TAŞITLAR VE SOSYAL YAŞAM... 1 1.2 TARİHSEL GELİŞİM... 1 1.2.1 Türk Otomotiv Endüstrisi... 5 1.3 TAŞITLARIN SINIFLANDIRILMASI... 8 1.4 TAŞITA ETKİYEN KUVVETLER... 9 1.5 TAŞIT
PATĐNAJ ÖNLEME SĐSTEMĐ(ASR)
") PATĐNAJ ÖNLEME SĐSTEMĐ(ASR) Mustafa YAZICI, H. Mehmet DEMĐREL TCK Patinaj Önleme Sistemi, harekete geçme ve hızlanma sırasında döndürülen tekerleklerin patinaj yaparak dönmesini engeller. Bu şekilde ASR,
PATĐNAJ ÖNLEME SĐSTEMĐ(ASR) Mustafa YAZICI, H. Mehmet DEMĐREL TCK Patinaj Önleme Sistemi, harekete geçme ve hızlanma sırasında döndürülen tekerleklerin patinaj yaparak dönmesini engeller. Bu şekilde ASR,
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ. Frenler - Genel. Abdullah DEMİR, Yrd. Doç. Dr.
 MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Frenler - Genel Abdullah DEMİR, Yrd. Doç. Dr. Frenler, güvenli sürüş için taşıtlarda bulunan en önemli aktif emniyet donanımıdır. Hareket halindeki taşıtı yavaşlatmak,
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Frenler - Genel Abdullah DEMİR, Yrd. Doç. Dr. Frenler, güvenli sürüş için taşıtlarda bulunan en önemli aktif emniyet donanımıdır. Hareket halindeki taşıtı yavaşlatmak,
SORULAR S.1 Aktif ve Pasif Güvenlik ne demektir? Aktif ve Pasif Güvenlik ile ilgili binek otomobillerde uygulanan sistemlerin isimlerini yazınız.
 MAK 490 VE OTM 310 Mekatronik Taşıt Güvenlik Sistemleri S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ K F A K Ü L T E S İ M A K İ N A M Ü H E N D İ S L İ Ğ İ B Ö L Ü M Ü V E
MAK 490 VE OTM 310 Mekatronik Taşıt Güvenlik Sistemleri S Ü L E Y M A N D E M İ R E L Ü N İ V E R S İ T E S İ M Ü H E N D İ S L İ K F A K Ü L T E S İ M A K İ N A M Ü H E N D İ S L İ Ğ İ B Ö L Ü M Ü V E
MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ. Frenler - Genel. HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR
 MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Frenler - Genel HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR TEKNİK VE DİĞER ÖNLEMLER KAZALARI AZALTABİLİR Mİ? EVET! ÖNLEM KAZA İlişkisi (Kuzey Avusturya 1961-2003)
MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Frenler - Genel HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR TEKNİK VE DİĞER ÖNLEMLER KAZALARI AZALTABİLİR Mİ? EVET! ÖNLEM KAZA İlişkisi (Kuzey Avusturya 1961-2003)
Otomatik moment değiştiriciler
 Otomatik moment değiştiriciler ANA FONKSİYON GRUPLARI 1. Hidrodinamik moment değiştirici (Trilok moment değiştirici), 2. Gereken sayıda kademeleri olan dişli grubu (genel olarak lamelli kavramalarla ve
Otomatik moment değiştiriciler ANA FONKSİYON GRUPLARI 1. Hidrodinamik moment değiştirici (Trilok moment değiştirici), 2. Gereken sayıda kademeleri olan dişli grubu (genel olarak lamelli kavramalarla ve
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Tekerlek Dinamiğinin İncelenmesi HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR Dinamik: Hareketin veya hareketteki değişmelerin sebeplerini araştırarak, kuvvet ile hareket
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ Tekerlek Dinamiğinin İncelenmesi HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR Dinamik: Hareketin veya hareketteki değişmelerin sebeplerini araştırarak, kuvvet ile hareket
OTOMOTİV MÜHENDİSLİĞİ II (AKTARMA ORGANLARI)
") OTOMOTİV MÜHENDİSLİĞİ II (AKTARMA ORGANLARI) Taşıtlarda farklı tahrik tipleri a ve b: motor ve tahrik önde c: motor ön, tahrik arka d:motor ve tahrik arka e:4 çeker a, Günümüzde otomobillerde yaygın kullanılan
OTOMOTİV MÜHENDİSLİĞİ II (AKTARMA ORGANLARI) Taşıtlarda farklı tahrik tipleri a ve b: motor ve tahrik önde c: motor ön, tahrik arka d:motor ve tahrik arka e:4 çeker a, Günümüzde otomobillerde yaygın kullanılan
OTOMOTİV TEKNOLOJİLERİ
 OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu hafta Şasi Sistemleri Tekerlekler ve Lastikler Süspansiyonlar Direksiyon Sistemleri
OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu hafta Şasi Sistemleri Tekerlekler ve Lastikler Süspansiyonlar Direksiyon Sistemleri
ADB (AIR DISC BRAKES/HAVALI DISK FRENLERI) HATA ARAMASI İÇIN TEMEL ESASLAR. Bakınız 1. c)
 HATA ARAMASI İÇIN TEMEL ESASLAR. Bakınız 1. c)") ADB (AIR DISC BRAKES/HAVALI DISK FRENLERI) HATA ARAMASI İÇIN TEMEL ESASLAR 1. Aşınma farkı 2. Zamanından önce oluşan aşınma 1. Fren kaliperi sıkıştı/kurallara uygun kaymıyor 1/6 temizleyin (lastik manşetlerde
ADB (AIR DISC BRAKES/HAVALI DISK FRENLERI) HATA ARAMASI İÇIN TEMEL ESASLAR 1. Aşınma farkı 2. Zamanından önce oluşan aşınma 1. Fren kaliperi sıkıştı/kurallara uygun kaymıyor 1/6 temizleyin (lastik manşetlerde
AİTM ve FREN FRENLERLE İLGİLİ TEMEL KAVRAMLAR
 AİTM ve FREN FRENLERLE İLGİLİ TEMEL KAVRAMLAR FREN: FRENLERLE İLGİLİ TEMEL KAVRAMLAR HAREKET HALİNDEKİ BİR ARACIN HIZINI AZALTMAYA VEYA TAMAMEN DURDURMAYA YARAYAN DÜZENEKLERDİR. FRENLERLE İLGİLİ TEMEL
AİTM ve FREN FRENLERLE İLGİLİ TEMEL KAVRAMLAR FREN: FRENLERLE İLGİLİ TEMEL KAVRAMLAR HAREKET HALİNDEKİ BİR ARACIN HIZINI AZALTMAYA VEYA TAMAMEN DURDURMAYA YARAYAN DÜZENEKLERDİR. FRENLERLE İLGİLİ TEMEL
KARAYOLU TAŞITLARINDA KULLANILAN TEKNİK DONANIMIN TRAFİK KAZALARINI ÖNLEMEDEKİ ROLÜ
 li. ULAŞIM VE TRAFİK KONGRESİ - SERGİSİ KARAYOLU TAŞITLARINDA KULLANILAN TEKNİK DONANIMIN TRAFİK KAZALARINI ÖNLEMEDEKİ ROLÜ * Doç. Dr. Duran ALTIPARMAK ÖZET Günümüzün taşıtlarında lüks ve konforun yanısıra
li. ULAŞIM VE TRAFİK KONGRESİ - SERGİSİ KARAYOLU TAŞITLARINDA KULLANILAN TEKNİK DONANIMIN TRAFİK KAZALARINI ÖNLEMEDEKİ ROLÜ * Doç. Dr. Duran ALTIPARMAK ÖZET Günümüzün taşıtlarında lüks ve konforun yanısıra
MOTOR VE ARAÇ TEKNĐĞĐ
 MOTOR VE ARAÇ TEKNĐĞĐ KONU : ARACIN ÜZERĐNDEKĐ SĐSTEMLER : FREN SĐSTEMĐ : GÖREVĐ : Aracı yavaşlatmak,yavaşlayan aracı durdurmak veya duran aracı sabitlemek için kullanılır. Araç üzerinde 3 tip fren bulunur:
MOTOR VE ARAÇ TEKNĐĞĐ KONU : ARACIN ÜZERĐNDEKĐ SĐSTEMLER : FREN SĐSTEMĐ : GÖREVĐ : Aracı yavaşlatmak,yavaşlayan aracı durdurmak veya duran aracı sabitlemek için kullanılır. Araç üzerinde 3 tip fren bulunur:
GÜÇ AKTARMA ORGANLARI
 GÜÇ AKTARMA ORGANLARI DEBRİYAJ ŞANZIMAN ŞAFT VEYA TAHRİK MİLİ DİFRANSİYEL AKS TEKERLEK 1.1. Hareket İletim Türleri Motor Trans aks Şanzıman Tahrik Şaftı Şaft (kardan mili) Diferansiyel Aks mili Aks Lastik
GÜÇ AKTARMA ORGANLARI DEBRİYAJ ŞANZIMAN ŞAFT VEYA TAHRİK MİLİ DİFRANSİYEL AKS TEKERLEK 1.1. Hareket İletim Türleri Motor Trans aks Şanzıman Tahrik Şaftı Şaft (kardan mili) Diferansiyel Aks mili Aks Lastik
FRENLER SAKARYA ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU
 FRENLER MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU Frenler 2 / 20 Frenler, sürtünme yüzeyli kavramalarla benzer prensiplere göre çalışan bir makine elemanı grubunu oluştururlar. Şu şekilde
FRENLER MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE ELEMANLARI-II DERS NOTU Frenler 2 / 20 Frenler, sürtünme yüzeyli kavramalarla benzer prensiplere göre çalışan bir makine elemanı grubunu oluştururlar. Şu şekilde
Volkswagen Amarok ve yeni Amarok Canyon 2014 incelemesi
 Volkswagen Amarok ve yeni Amarok Canyon 2014 incelemesi Volkswagen ticarinin ilk pick up ı olarak sahaya sunulan Amarok alıcılarına hem zorlu arazi şartlarında hem de sportif ve göz alıcı çizgileriyle
Volkswagen Amarok ve yeni Amarok Canyon 2014 incelemesi Volkswagen ticarinin ilk pick up ı olarak sahaya sunulan Amarok alıcılarına hem zorlu arazi şartlarında hem de sportif ve göz alıcı çizgileriyle
Fen Bilimleri Enstitüsü Mekatronik Mühendisliği A.B.D. Mekatronikte İleri Kontrol Yöntemleri. Doktora Dersi. 2015 2016 Bahar Dönemi Final Ödevi
 Fen Bilimleri Enstitüsü Mekatronik Mühendisliği A.B.D Mekatronikte İleri Kontrol Yöntemleri Doktora Dersi 2015 2016 Bahar Dönemi Final Ödevi Konu : ABS Sistemi Ders Danışmanı: Doç. Dr. İsmail SARITAŞ Hazırlayan:
Fen Bilimleri Enstitüsü Mekatronik Mühendisliği A.B.D Mekatronikte İleri Kontrol Yöntemleri Doktora Dersi 2015 2016 Bahar Dönemi Final Ödevi Konu : ABS Sistemi Ders Danışmanı: Doç. Dr. İsmail SARITAŞ Hazırlayan:
 Marka, Model PERKINS Tip 1104D - 44TA dizel motor Emisyon Sınıfı Faz III - A (Tier 3) Silindir Adedi 4 adet sıra Çap x Strok 105 x 127 mm Hacim 4.400 cc Max. Güç 74,5 kw, 100 hp (2200 d/dk) Max. Tork 410
Marka, Model PERKINS Tip 1104D - 44TA dizel motor Emisyon Sınıfı Faz III - A (Tier 3) Silindir Adedi 4 adet sıra Çap x Strok 105 x 127 mm Hacim 4.400 cc Max. Güç 74,5 kw, 100 hp (2200 d/dk) Max. Tork 410
OTOMOTİV TEKNOLOJİLERİ
 OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde Aktarma Organları Sistem Tanımı Mekanik Kavramalar Manuel Transmisyon ve Transaxle
OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde Aktarma Organları Sistem Tanımı Mekanik Kavramalar Manuel Transmisyon ve Transaxle
EKSTRA HEYECAN, EKSTRA MACERA!
 EKSTRA HEYECAN, EKSTRA MACERA! HEYECAN VERİCİ İÇ TASARIM MODUNUZA GÖRE KİŞİSELLEŞTİRİN, KOLAYCA KULLANIN. Sürücü, üç farklı direksiyon hassasiyetinden (spor, konfor ve normal) birini seçerek en doğru duyarlılık
EKSTRA HEYECAN, EKSTRA MACERA! HEYECAN VERİCİ İÇ TASARIM MODUNUZA GÖRE KİŞİSELLEŞTİRİN, KOLAYCA KULLANIN. Sürücü, üç farklı direksiyon hassasiyetinden (spor, konfor ve normal) birini seçerek en doğru duyarlılık
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY
 EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
6x2 Kamyon Arka Dingil Grubunun Fren Performansına Etkisi ve Daha İyi Fren Performansı İçin Öneriler
 6x2 Kamyon Arka Dingil Grubunun Fren Performansına Etkisi ve Daha İyi Fren Performansı İçin Öneriler Alpay LÖK Makina Yüksek Mühendisi, alpay@frenteknik.com Tuncay AVUNÇ Makina Yüksek Mühendisi, tuncayavunc@gmail.com
6x2 Kamyon Arka Dingil Grubunun Fren Performansına Etkisi ve Daha İyi Fren Performansı İçin Öneriler Alpay LÖK Makina Yüksek Mühendisi, alpay@frenteknik.com Tuncay AVUNÇ Makina Yüksek Mühendisi, tuncayavunc@gmail.com
Şasi kamyon 8 2 RADT-AR Yüksek RADT-GR Yüksek 43 43, RAPDT-GR Yüksek Orta
 ÇEKİŞ / ŞASİ YÜKSEKLİĞİ / DİNGİL MESAFESİ (boyutlar dm olarak verilmiştir) Şasi kamyon 4 2 RAD-L90 Yüksek 34 35 37 40 43 46 49 52 56 60 RAD-GR Yüksek 34 37 40 43 46 49 52 56 60 63 65 67 Orta 37 40 43 46
ÇEKİŞ / ŞASİ YÜKSEKLİĞİ / DİNGİL MESAFESİ (boyutlar dm olarak verilmiştir) Şasi kamyon 4 2 RAD-L90 Yüksek 34 35 37 40 43 46 49 52 56 60 RAD-GR Yüksek 34 37 40 43 46 49 52 56 60 63 65 67 Orta 37 40 43 46
MACERA HİÇ BU KADAR ÇEKİCİ OLMAMIŞTI!
 MACERA HİÇ BU KADAR ÇEKİCİ OLMAMIŞTI! ZEKASI İÇİNDE SAKLI! MODUNUZA GÖRE KİŞİSELLEŞTİRİN, KOLAYCA KULLANIN. Sürücü, üç farklı direksiyon hassasiyetinden (spor, konfor ve normal) birini seçerek en doğru
MACERA HİÇ BU KADAR ÇEKİCİ OLMAMIŞTI! ZEKASI İÇİNDE SAKLI! MODUNUZA GÖRE KİŞİSELLEŞTİRİN, KOLAYCA KULLANIN. Sürücü, üç farklı direksiyon hassasiyetinden (spor, konfor ve normal) birini seçerek en doğru
Kar Mücadelesi. Prof.Dr.Mustafa KARAŞAHİN
 Kar Mücadelesi Prof.Dr.Mustafa KARAŞAHİN Yüzey Kaplaması Yüzey Dokusu Kaplamanın yüzeysel dokusu ve pürüzlülüğü hem sürüş konforunu hem de sürüş emniyetini belirler. Kaplama yeterince düzgün ama gerekli
Kar Mücadelesi Prof.Dr.Mustafa KARAŞAHİN Yüzey Kaplaması Yüzey Dokusu Kaplamanın yüzeysel dokusu ve pürüzlülüğü hem sürüş konforunu hem de sürüş emniyetini belirler. Kaplama yeterince düzgün ama gerekli
OTOMOTİV TEKNOLOJİLERİ
 OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde 1. Direnç a. Aerodinamik b. Dinamik, yuvarlanma c. Yokuş 2. Tekerlek tahrik
OTOMOTİV TEKNOLOJİLERİ Prof. Dr. Atatürk Üniversitesi, Mühendislik Fakültesi, Makina Mühendisliği Bölümü, Erzurum Bu bölümde 1. Direnç a. Aerodinamik b. Dinamik, yuvarlanma c. Yokuş 2. Tekerlek tahrik
REHBER BROŞÜRÜNÜZ FREN SİSTEMİ
 REHBER BROŞÜRÜNÜZ FREN SİSTEMİ FREN SİSTEMİ: GÜVENLİĞİNİZ İÇİN ANA UNSUR Fren sistemi talebinize anında ve kesin olarak yanıt vermelidir. Fren sisteminin en önemli öğeleri kampanalar, balatalar, diskler,
REHBER BROŞÜRÜNÜZ FREN SİSTEMİ FREN SİSTEMİ: GÜVENLİĞİNİZ İÇİN ANA UNSUR Fren sistemi talebinize anında ve kesin olarak yanıt vermelidir. Fren sisteminin en önemli öğeleri kampanalar, balatalar, diskler,
Geleneksel sıcaklık ayarı: Önce emniyet Elektronik kontrollü termostat Daha fazla verimlilik için güvenli bir seçim
 MAHLE Aftermarket ürün tanıtımı Elektronik kontrollü termostatlar Geleneksel sıcaklık ayarı: Önce emniyet Bir binek araç motorundaki yanma işlemi, yaklaşık 110 C lik çalışma sıcaklığı seviyesinde mükemmel
MAHLE Aftermarket ürün tanıtımı Elektronik kontrollü termostatlar Geleneksel sıcaklık ayarı: Önce emniyet Bir binek araç motorundaki yanma işlemi, yaklaşık 110 C lik çalışma sıcaklığı seviyesinde mükemmel
Kar Mücadelesi-Siperler. Prof.Dr.Mustafa KARAŞAHİN
 Kar Mücadelesi-Siperler Prof.Dr.Mustafa KARAŞAHİN Yüzey Kaplaması Yüzey Dokusu Kaplamanın yüzeysel dokusu ve pürüzlülüğü hem sürüş konforunu hem de sürüş emniyetini belirler. Kaplama yeterince düzgün ama
Kar Mücadelesi-Siperler Prof.Dr.Mustafa KARAŞAHİN Yüzey Kaplaması Yüzey Dokusu Kaplamanın yüzeysel dokusu ve pürüzlülüğü hem sürüş konforunu hem de sürüş emniyetini belirler. Kaplama yeterince düzgün ama
MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ. Frenler - Genel. HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR
 MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Frenler - Genel HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR TEKNİK VE DİĞER ÖNLEMLER KAZALARI AZALTABİLİR Mİ? EVET! ÖNLEM KAZA İlişkisi (Kuzey Avusturya 1961-2003)
MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Frenler - Genel HAZIRLAYAN: Yrd. Doç. Dr. Abdullah DEMİR TEKNİK VE DİĞER ÖNLEMLER KAZALARI AZALTABİLİR Mİ? EVET! ÖNLEM KAZA İlişkisi (Kuzey Avusturya 1961-2003)
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Abdullah DEMİR, Yrd. Doç. Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Lane Keeping System Kör Nokta Bilgi Sistemi BLIS Park Asistanı Lane Keeping Assist Helps keep drivers within
Abdullah DEMİR, Yrd. Doç. Dr. MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Lane Keeping System Kör Nokta Bilgi Sistemi BLIS Park Asistanı Lane Keeping Assist Helps keep drivers within
Basınç farkı=çalışma basıncı (PA,B)-Şarj basıncı (PSp)+Güvenlik payı Ayar Diyagramı
-Şarj basıncı (PSp)+Güvenlik payı Ayar Diyagramı") 1 Pistonlu pompa ve motorlarla sağlanacak hidrostatik tahrik aracın sürüşünde birçok avantaj getirmektedir. İyi bir sürüş konforu ve yüksek çalışma hızı yönündeki talepler hidrostatik tahrikle çalışan
1 Pistonlu pompa ve motorlarla sağlanacak hidrostatik tahrik aracın sürüşünde birçok avantaj getirmektedir. İyi bir sürüş konforu ve yüksek çalışma hızı yönündeki talepler hidrostatik tahrikle çalışan
Retarder kullanımı ve sürüş tarzı ile Güvenli ulaşın.
 G 1853 tr ak / WA 1 000 2013-07 Ölçü ve Resimler bağlayıcı değil,değişkenlik hakkımız mahfuzdur. Retarder kullanımı ve sürüş tarzı ile Güvenli ulaşın. Voith Turbo Güç Aktarma Teknigi Ltd. Sti. Altıntepe
G 1853 tr ak / WA 1 000 2013-07 Ölçü ve Resimler bağlayıcı değil,değişkenlik hakkımız mahfuzdur. Retarder kullanımı ve sürüş tarzı ile Güvenli ulaşın. Voith Turbo Güç Aktarma Teknigi Ltd. Sti. Altıntepe
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
Parametreler Şasi. Giriş
 Giriş Bu belgedeki parametreler listesini sınırlamak için sadece üstyapı imalatçılarının kullanabileceği parametreler açıklanmıştır. Belli bir araca yönelik mevcut parametrelerin tüm detayları için, lütfen
Giriş Bu belgedeki parametreler listesini sınırlamak için sadece üstyapı imalatçılarının kullanabileceği parametreler açıklanmıştır. Belli bir araca yönelik mevcut parametrelerin tüm detayları için, lütfen
İdeal Toplu Taşıma Aracı
 TR İdeal Toplu Taşıma Aracı ATAK, üstün manevra kabiliyeti, yüksek yolcu kapasitesi, engelli erişimine uygun alçak tabanlı yapısı, aracın arkasında konumlandırılmış ekonomi, performans ve sessiz yolculuk
TR İdeal Toplu Taşıma Aracı ATAK, üstün manevra kabiliyeti, yüksek yolcu kapasitesi, engelli erişimine uygun alçak tabanlı yapısı, aracın arkasında konumlandırılmış ekonomi, performans ve sessiz yolculuk
Fizik 101: Ders 7 Ajanda
 Fizik 101: Ders 7 Ajanda Sürtünme edir? asıl nitelendirebiliriz? Sürtünme modeli Statik & Kinetik sürtünme Sürtünmeli problemler Sürtünme ne yapar? Yeni Konu: Sürtünme Rölatif harekete karşıdır. Öğrendiklerimiz
Fizik 101: Ders 7 Ajanda Sürtünme edir? asıl nitelendirebiliriz? Sürtünme modeli Statik & Kinetik sürtünme Sürtünmeli problemler Sürtünme ne yapar? Yeni Konu: Sürtünme Rölatif harekete karşıdır. Öğrendiklerimiz
ASENKRON MOTORLARI FRENLEME METODLARI
 DENEY-7 ASENKRON MOTORLARI FRENLEME METODLARI Frenlemenin tanımı ve çeşitleri Motorların enerjisi kesildikten sonra rotorun kendi ataletinden dolayı bir süre daha dönüşünü sürdürür. Yani motorun durması
DENEY-7 ASENKRON MOTORLARI FRENLEME METODLARI Frenlemenin tanımı ve çeşitleri Motorların enerjisi kesildikten sonra rotorun kendi ataletinden dolayı bir süre daha dönüşünü sürdürür. Yani motorun durması
OTOMOTİV FREN SİSTEMLERİ
 OTOMOTİV FREN SİSTEMLERİ Fren sistemi, motorlu taşıtın yavaşlamasını ve durmasını sağlayan düzenek. Yokuş aşağı inen taşıtın hız kazanmasını önlemek, duran taşıtın bu durumunu sürdürmek üzere de kullanılır.
OTOMOTİV FREN SİSTEMLERİ Fren sistemi, motorlu taşıtın yavaşlamasını ve durmasını sağlayan düzenek. Yokuş aşağı inen taşıtın hız kazanmasını önlemek, duran taşıtın bu durumunu sürdürmek üzere de kullanılır.
REAR-ENGINE COACH Most economical and comfortable solution to your business
 REARENGINE COACH Most economical and comfortable solution to your business EN ULAŞIMDA KENTSEL DÖNÜŞÜM ZAMANI MÜKEMMEL PERFORMANS, DÜŞÜK SARFİYAT Karsan Jest, Euro 5 motoru ve 6 ileri şanzımanıyla mükemmel
REARENGINE COACH Most economical and comfortable solution to your business EN ULAŞIMDA KENTSEL DÖNÜŞÜM ZAMANI MÜKEMMEL PERFORMANS, DÜŞÜK SARFİYAT Karsan Jest, Euro 5 motoru ve 6 ileri şanzımanıyla mükemmel
Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu
 Optimization of Air Distribution in Waste Water Treatment Plants to Save Energy Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu Jan Talkenberger, Binder Group, Ulm, Germany
Optimization of Air Distribution in Waste Water Treatment Plants to Save Energy Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu Jan Talkenberger, Binder Group, Ulm, Germany
Vites Kutusu (Şanzıman) Nedir?
 Nedir?") MANUEL ŞANZIMAN Vites Kutusu (Şanzıman) Nedir? Vites kutusu (şanzıman); hız ve tork değiştirici bir dişli kutusudur. Motorda üretilen güç iki temel parametre içerir; bunlar devir sayısı (hız) ve torktur
MANUEL ŞANZIMAN Vites Kutusu (Şanzıman) Nedir? Vites kutusu (şanzıman); hız ve tork değiştirici bir dişli kutusudur. Motorda üretilen güç iki temel parametre içerir; bunlar devir sayısı (hız) ve torktur
Seçime bağlı çıkış sinyalleri (UF 356) Seçime bağlı çıkış sinyalleri. Ters sinyal
 Seçime bağlı çıkış sinyalleri. Ters sinyal") Seçime bağlı çıkış sinyalleri Seçime bağlı çıkış sinyalleri Bu belge C493 konektörü pim 8-12 için opsiyonel çıkış sinyallerini açıklamaktadır (uzatılmış fonksiyonelliğe sahip konektör). Bu sinyaller SDP3
Seçime bağlı çıkış sinyalleri Seçime bağlı çıkış sinyalleri Bu belge C493 konektörü pim 8-12 için opsiyonel çıkış sinyallerini açıklamaktadır (uzatılmış fonksiyonelliğe sahip konektör). Bu sinyaller SDP3
Karda Otomobil Nasıl Kullanılmalı Kış Ayları için Otomobil Ayarları
 Karda Otomobil Nasıl Kullanılmalı Kış Ayları için Otomobil Ayarları Karlı havalarda prensip Yumuşak düşün, yumuşak davran olmalı. Gaz pedalına aniden basma ktan ya da bırakmaktan, sert direksiyon hareketlerinden
Karda Otomobil Nasıl Kullanılmalı Kış Ayları için Otomobil Ayarları Karlı havalarda prensip Yumuşak düşün, yumuşak davran olmalı. Gaz pedalına aniden basma ktan ya da bırakmaktan, sert direksiyon hareketlerinden
Hız-Moment Dönüşüm Mekanizmaları. Vedat Temiz
 Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
Meydan Okumaya Hazır.
 az Lastikleri Matador Meydan Okumaya azır. MP47 ectorra 3 Matador B MP7 Izzarda A/ MP8 onquerra MPS330 Maxilla ağmur yağabilir. Ama suda kızaklama kaderiniz değil batlar 13 Lastiklerinizi 3 mm de değiştirin.
az Lastikleri Matador Meydan Okumaya azır. MP47 ectorra 3 Matador B MP7 Izzarda A/ MP8 onquerra MPS330 Maxilla ağmur yağabilir. Ama suda kızaklama kaderiniz değil batlar 13 Lastiklerinizi 3 mm de değiştirin.
2016 YOL LASTİKLERİ ÜRÜN KATALOĞU
 2016 YOL LASTİKLERİ ÜRÜN KATALOĞU S1 evo² (K117) Kuru & ıslak performans arasındaki en iyi denge! Yüksek hızlarda sürerken kontrollü ve hassas viraj alma kabiliyeti. Minimuma indirilmiş yuvarlanma direnci
2016 YOL LASTİKLERİ ÜRÜN KATALOĞU S1 evo² (K117) Kuru & ıslak performans arasındaki en iyi denge! Yüksek hızlarda sürerken kontrollü ve hassas viraj alma kabiliyeti. Minimuma indirilmiş yuvarlanma direnci
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
Trend X. 8 İleri Otomatik Şanzıman ile Döner Vites Konsolu Direksiyondan kumandalı otomatik vites
 Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI - II HİDROLİK FREN SİSTEMLERİ
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI - II HİDROLİK FREN SİSTEMLERİ DENEY SORUMLUSU Arş. Gör. Şaban ULUS Ocak 2013 KAYSERİ HİDROLİK FREN
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI - II HİDROLİK FREN SİSTEMLERİ DENEY SORUMLUSU Arş. Gör. Şaban ULUS Ocak 2013 KAYSERİ HİDROLİK FREN
MX2 İnvertörlerde Frenleme Direnci Bağlantısı
 MX2 İnvertörlerde Frenleme Direnci Bağlantısı İÇİNDEKİLER Giriş Harici Frenleme Direnci(Dinamik) Kullanımı Frenleme Direnci Boyutları ve Seçim Tablosu MX2 de Frenleme Direnci Bağlantıları MX2 de Frenleme
MX2 İnvertörlerde Frenleme Direnci Bağlantısı İÇİNDEKİLER Giriş Harici Frenleme Direnci(Dinamik) Kullanımı Frenleme Direnci Boyutları ve Seçim Tablosu MX2 de Frenleme Direnci Bağlantıları MX2 de Frenleme
MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ
 Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Şerit Takip sistemi Kör Nokta Bilgi Sistemi BLIS Park Asistanı -Ekler- Kaynak: Toyota Kaynak: Toyota http://www.inautonews.com/new-safety-features-from-ford-collision-warning-adaptive-cruise-control-and-blis
Yrd. Doç. Dr. Abdullah DEMİR MARMARA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DİGER EMNİYET SİSTEMLERİ Şerit Takip sistemi Kör Nokta Bilgi Sistemi BLIS Park Asistanı -Ekler- Kaynak: Toyota Kaynak: Toyota http://www.inautonews.com/new-safety-features-from-ford-collision-warning-adaptive-cruise-control-and-blis
Otomatik Şanzımanlar
 Otomatik Şanzımanlar Taşıtın hızına, gaz kelebeği pozisyonuna, yol ve yük şartlarına bağlı olarak viteslerin otomatik olarak değişmelerine imkan veren bir sistemdir. Hız ve tork ihtiyacına göre gerekli
Otomatik Şanzımanlar Taşıtın hızına, gaz kelebeği pozisyonuna, yol ve yük şartlarına bağlı olarak viteslerin otomatik olarak değişmelerine imkan veren bir sistemdir. Hız ve tork ihtiyacına göre gerekli
TAŞITLARDA TEKERLEK KİLİTLENMESİ VE KAYMASININ DURMA MESAFESİ VE KARARLILIĞA ETKİSİ
 TEKNOLOJİ, (2001), Sayı 1-2, 47-58 TEKNOLOJİ TAŞITLARDA TEKERLEK KİLİTLENMESİ VE KAYMASININ DURMA MESAFESİ VE KARARLILIĞA ETKİSİ Duran ALTIPARMAK Atilla KOCA Gazi Üniversitesi Teknik Eğitim Fakültesi,
TEKNOLOJİ, (2001), Sayı 1-2, 47-58 TEKNOLOJİ TAŞITLARDA TEKERLEK KİLİTLENMESİ VE KAYMASININ DURMA MESAFESİ VE KARARLILIĞA ETKİSİ Duran ALTIPARMAK Atilla KOCA Gazi Üniversitesi Teknik Eğitim Fakültesi,
MODÜL-13 ÖRNEK SORULAR. 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir?
 MODÜL-13 ÖRNEK SORULAR 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir? A) Kanatçık (aileron) B) İrtifa dümeni (elevator) C) Flap 2. Kanadın üst yüzeyinde; A) Basınç artar, hız
MODÜL-13 ÖRNEK SORULAR 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir? A) Kanatçık (aileron) B) İrtifa dümeni (elevator) C) Flap 2. Kanadın üst yüzeyinde; A) Basınç artar, hız
ASİSTAN ARŞ. GÖR. GÜL DAYAN
 ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
ASİSTAN ARŞ. GÖR. GÜL DAYAN VİSKOZİTE ÖLÇÜMÜ Viskozite, bir sıvının iç sürtünmesi olarak tanımlanır. Viskoziteyi etkileyen en önemli faktör sıcaklıktır. Sıcaklık arttıkça sıvıların viskoziteleri azalır.
Elektromekanik Kumanda Sistemleri / Ders Notları
 10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
Kritik Yol Şartlarında Lastik Basıncı Değişimlerinin ABS Performansına Etkilerinin Deneysel Analizi
 6 Published in th International Symposium on Innovative Technologies in Engineering and Science 3-5 November 6 (ISITES6 Alanya/Antalya - Turkey) Kritik Yol Şartlarında Lastik Basıncı Değişimlerinin ABS
6 Published in th International Symposium on Innovative Technologies in Engineering and Science 3-5 November 6 (ISITES6 Alanya/Antalya - Turkey) Kritik Yol Şartlarında Lastik Basıncı Değişimlerinin ABS
şasi 1 Şasi kamyon 8 6 Şasi kamyon 8 4 ÇEKİŞ / ŞASİ YÜKSEKLİĞİ / DİNGİL MESAFESİ (boyutlar dm olarak verilmiştir)
") ÇEKİŞ / ŞASİ YÜKSEKLİĞİ / DİNGİL MESAFESİ (boyutlar dm olarak verilmiştir) Şasi kamyon X- 60 63 65 67 60 63 65 67 X- 60 Şasi kamyon 4 4 XX- Şasi kamyon 6 2 60 48 60 48 60 60 Şasi kamyon 6 4 X- 32 32 X-
ÇEKİŞ / ŞASİ YÜKSEKLİĞİ / DİNGİL MESAFESİ (boyutlar dm olarak verilmiştir) Şasi kamyon X- 60 63 65 67 60 63 65 67 X- 60 Şasi kamyon 4 4 XX- Şasi kamyon 6 2 60 48 60 48 60 60 Şasi kamyon 6 4 X- 32 32 X-
CITROËN BERLINGO AĞUSTOS 2009
 CITROËN BERLINGO AĞUSTOS 2009 cıtroën BERLINGO COMBI GÖRÜŞ AÇINIZI GENİŞLETİN. Geniş ön camları ile Berlingo Combi size geniş bir görüş açısı ve maksimum aydınlık sunarken, sürüş keyfinden de taviz vermiyor.
CITROËN BERLINGO AĞUSTOS 2009 cıtroën BERLINGO COMBI GÖRÜŞ AÇINIZI GENİŞLETİN. Geniş ön camları ile Berlingo Combi size geniş bir görüş açısı ve maksimum aydınlık sunarken, sürüş keyfinden de taviz vermiyor.
M320D2. Caterpillar M320D2 Lastik Tekerlekli Ekskavatör. Cat C7.1 ACERT Net Beygir Gücü. Motor kw / 168 hp Kepçe Kapasitesi
 Motor Cat C7.1 ACERT Net Beygir Gücü 123.5 kw / 168 hp Kepçe Kapasitesi 0.35-1.18 m 3 M320D2 Çalısma Ağırlığı * 18 850-19 800 kg * Çalısma ağırlığı ve kepçe makine konfigürasyonuna göre değisebilir. Caterpillar
Motor Cat C7.1 ACERT Net Beygir Gücü 123.5 kw / 168 hp Kepçe Kapasitesi 0.35-1.18 m 3 M320D2 Çalısma Ağırlığı * 18 850-19 800 kg * Çalısma ağırlığı ve kepçe makine konfigürasyonuna göre değisebilir. Caterpillar
aircoolers Evaporatörler Aircoolers TAVAN TİPİ EVAPORATÖRLER CEILING TYPE AIR COOLERS DUVAR TİPİ EVAPORATÖRLER WALL TYPE AIR COOLERS
 aircoolers Evaporatörler Aircoolers CEILING TYPE AIR COOLERS Teknik Bilgiler / Technical Details UYGULAMA Ürünlerimiz, endüstriyel ve ticari soğuk muhafaza, donmuş muhafaza, şoklama hücreleri ve serinletilme
aircoolers Evaporatörler Aircoolers CEILING TYPE AIR COOLERS Teknik Bilgiler / Technical Details UYGULAMA Ürünlerimiz, endüstriyel ve ticari soğuk muhafaza, donmuş muhafaza, şoklama hücreleri ve serinletilme
Sirkülasyon Pompaları
 Sirkülasyon Pompaları Circulation Pumps Dünyayı koruyan teknolojilerle daha konforlu bir hayat için çalışıyoruz.. Dünyanın önde gelen markaları, uzmanları, bilim insanları ve profesyonel kadroları, gelişen
Sirkülasyon Pompaları Circulation Pumps Dünyayı koruyan teknolojilerle daha konforlu bir hayat için çalışıyoruz.. Dünyanın önde gelen markaları, uzmanları, bilim insanları ve profesyonel kadroları, gelişen
Herkes arada bir durmak zorundadır. Sizinki lastik arızası için olmasın. ContiPressureCheck. Lastik basınç takip sistemi
 Herkes arada bir durmak zorundadır. Sizinki lastik arızası için olmasın. ContiPressureCheck Lastik basınç takip sistemi ContiPressureCheck Arıza istatistiklerini azaltmak için kaybedecek zaman yok. ADAC
Herkes arada bir durmak zorundadır. Sizinki lastik arızası için olmasın. ContiPressureCheck Lastik basınç takip sistemi ContiPressureCheck Arıza istatistiklerini azaltmak için kaybedecek zaman yok. ADAC
TAMBUR FİLTRE. Özellikler FILTRATION AND TREATMENT SYSTEMS LTD. Arıtma Cinsi; Askıdaki katı maddelerin süzülerek dışarı atılması
 TAMBUR FİLTRE Özellikler Arıtma Cinsi; Askıdaki katı maddelerin süzülerek dışarı atılması Deniz suyuna dayanıklı Korozyona karşı süper dayanıklılık Sürekli filtrasyon Herhangi bir basınç gerektirmez Atmosferik
TAMBUR FİLTRE Özellikler Arıtma Cinsi; Askıdaki katı maddelerin süzülerek dışarı atılması Deniz suyuna dayanıklı Korozyona karşı süper dayanıklılık Sürekli filtrasyon Herhangi bir basınç gerektirmez Atmosferik
Boşaltma sırasında motor devri kontrolü. Arkaplan
 Arkaplan Arkaplan Kana kaldıraçlı kamyonu veya damperli gövdeyi kullanırken aracın manevra yapmasını kolaylaştırmak için, motor devrini geçici olarak arttırmak olumlu olabilir. Sürüş modu boş vites haricindeki
Arkaplan Arkaplan Kana kaldıraçlı kamyonu veya damperli gövdeyi kullanırken aracın manevra yapmasını kolaylaştırmak için, motor devrini geçici olarak arttırmak olumlu olabilir. Sürüş modu boş vites haricindeki
Mühendislik Mekaniği Dinamik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Mühendislik Mekaniği Dinamik Yrd.Doç.Dr. Akın Ataş Bölüm 17 Rijit Cismin Düzlemsel Kinetiği; Kuvvet ve İvme Kaynak: Mühendislik Mekaniği: Dinamik, R.C.Hibbeler, S.C.Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok.
Vito Mixto/Kombi Donanım Özellikleri
 Mixto 111 Mixto 114 Güvenlik ABS (Kilitlenmeyi Önleyici Fren Sistemi) ASR (Antipatinaj Sistemi) BAS (Frenleme Kuvveti Yardım Sistemi) 9. Nesil adaptive ESP (Yüke Duyarlı Elektronik Dengeleme Programı)
Mixto 111 Mixto 114 Güvenlik ABS (Kilitlenmeyi Önleyici Fren Sistemi) ASR (Antipatinaj Sistemi) BAS (Frenleme Kuvveti Yardım Sistemi) 9. Nesil adaptive ESP (Yüke Duyarlı Elektronik Dengeleme Programı)
OTOMATİK KLİMA SİSTEMİ
 OTOMATİK KLİMA SİSTEMİ Kabin içerisinin serinletilmesi ve ısıtılması işlemi, klima kontrol ünitesi tarafından kontrol edilir.klima kontrol ünitesi; kendisi ile bağlantılı olan parçaların sürat ve hareketleri
OTOMATİK KLİMA SİSTEMİ Kabin içerisinin serinletilmesi ve ısıtılması işlemi, klima kontrol ünitesi tarafından kontrol edilir.klima kontrol ünitesi; kendisi ile bağlantılı olan parçaların sürat ve hareketleri
Yenilenen Corolla Teknik ve Donanım Tablosu
 Teknik özellikler 1.33 VVT-i Comfort 1.6 VVT-i Comfort 1.6 VVT-i Comfort Extra 1.6 VVT-i Elegant Düz Vites Düz Vites Düz Vites Otomatik Vites Düz Vites Otomatik Vites ÖLÇÜLER Boy x En x Yükseklik mm 4545
Teknik özellikler 1.33 VVT-i Comfort 1.6 VVT-i Comfort 1.6 VVT-i Comfort Extra 1.6 VVT-i Elegant Düz Vites Düz Vites Düz Vites Otomatik Vites Düz Vites Otomatik Vites ÖLÇÜLER Boy x En x Yükseklik mm 4545
Hidrostatik Güç İletimi. Vedat Temiz
 Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
ARACIN YOLCULUK ÖNCESİ HAZIRLIĞI
 ARACIN YOLCULUK ÖNCESİ HAZIRLIĞI 1) Araca her binildiğinde aşağıdakilerden hangisi kontrol edilir? A) Lastikler B) Hava filtresinin temizliğine, C) Polen filtresinin temizliğine, D) Yağ filtresinin temizliğine
ARACIN YOLCULUK ÖNCESİ HAZIRLIĞI 1) Araca her binildiğinde aşağıdakilerden hangisi kontrol edilir? A) Lastikler B) Hava filtresinin temizliğine, C) Polen filtresinin temizliğine, D) Yağ filtresinin temizliğine
TARIM TRAKTÖRLERİ 21.07.2015. Tarım Traktörleri. Traktör Tipleri. Tarım traktörlerindeki önemli gelişim aşamaları
 TARIM TRAKTÖRLERİ Tarım Traktörleri Traktör, kelime olarak çekici veya hareket ettirici anlamına gelmektedir Traktörler, tarımsal işletmelerde çeşitli iş makinelerinin çalıştırılması için kullanılan kuvvet
TARIM TRAKTÖRLERİ Tarım Traktörleri Traktör, kelime olarak çekici veya hareket ettirici anlamına gelmektedir Traktörler, tarımsal işletmelerde çeşitli iş makinelerinin çalıştırılması için kullanılan kuvvet
DİŞLİ ÇARKLAR I: GİRİŞ
 DİŞLİ ÇARKLAR I: GİRİŞ Prof. Dr. İrfan KAYMAZ Mühendislik Fakültesi Makine Mühendisliği Bölümü Giriş Dişli Çarklar Bu bölüm sonunda öğreneceğiniz konular: Güç ve Hareket İletim Elemanları Basit Dişli Dizileri
DİŞLİ ÇARKLAR I: GİRİŞ Prof. Dr. İrfan KAYMAZ Mühendislik Fakültesi Makine Mühendisliği Bölümü Giriş Dişli Çarklar Bu bölüm sonunda öğreneceğiniz konular: Güç ve Hareket İletim Elemanları Basit Dişli Dizileri
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
BURSA TEKNİK ÜNİVERSİTESİ DOĞA BİLİMLERİ, MİMARLIK VE MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ
 BURSA TEKNİK ÜNİVERSİTESİ DOĞA BİLİMLERİ, MİMARLIK VE MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ TAŞIT FREN SİSTEMLERİ TESTİ DENEY FÖYÜ (HİDROLİK SERVO FREN SİSTEMİ) 1. GİRİŞ Fren sistemi, güvenli
BURSA TEKNİK ÜNİVERSİTESİ DOĞA BİLİMLERİ, MİMARLIK VE MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ TAŞIT FREN SİSTEMLERİ TESTİ DENEY FÖYÜ (HİDROLİK SERVO FREN SİSTEMİ) 1. GİRİŞ Fren sistemi, güvenli
Bobin Gövdesi. Flanşı Tork Ayar Vidası. Balata. Dişli. Montaj Vidası
 Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
Trend X. 8 İleri Otomatik Şanzıman ile Döner Vites Konsolu Direksiyondan kumandalı otomatik vites
 Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Elektrikli Vibratör Sürücüleri
 Elektrikli Vibratör Sürücüleri Tünkers elektrikli vibratör kazık çakıcıları self senkronizasyon prensibi ve doğru hizalanmış titreşimleri yaratmak ilkesine göre çalışır. Balanssız yük milli vibratör, zıt
Elektrikli Vibratör Sürücüleri Tünkers elektrikli vibratör kazık çakıcıları self senkronizasyon prensibi ve doğru hizalanmış titreşimleri yaratmak ilkesine göre çalışır. Balanssız yük milli vibratör, zıt
6. Kütlesi 600 g ve öz ısısı c=0,3 cal/g.c olan cismin sıcaklığı 45 C den 75 C ye çıkarmak için gerekli ısı nedir?
 ADI: SOYADI: No: Sınıfı: A) Grubu Tarih.../.../... ALDIĞI NOT:... ( ) a) Termometreler genleşme ilkesine göre çalışır. ( ) b) Isı ve sıcaklık eş anlamlı kavramlardır. ( ) c) Fahrenheit ve Celsius termometrelerinin
ADI: SOYADI: No: Sınıfı: A) Grubu Tarih.../.../... ALDIĞI NOT:... ( ) a) Termometreler genleşme ilkesine göre çalışır. ( ) b) Isı ve sıcaklık eş anlamlı kavramlardır. ( ) c) Fahrenheit ve Celsius termometrelerinin
Trend X. *Broşürde yer alan görseller ile pazara sunulan araçlar arasında donanımsal ve görsel açıdan farklılıklar olabilir.
 Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Trend X 16 aluminyum alaşım jantlar Ön sis farları Gündüz yanan LED farlar Elektrikli, ısıtmalı, sinyalli yan aynalar Elektrikli ön ve arka camlar 4 Yönlü manuel sürücü koltuğu Sürücü bel desteği Deri
Sayısız özellik, kusursuz güzellik.
 Caddy Maxi Van Sayısız özellik, kusursuz güzellik. Caddy Maxi Van işiniz ne olursa olsun keyfe dönüştürüyor. Geniş iç hacmi ve keskin dış hatlarıyla size yakışan iş ortağınız oluyor. TDI teknolojisine
Caddy Maxi Van Sayısız özellik, kusursuz güzellik. Caddy Maxi Van işiniz ne olursa olsun keyfe dönüştürüyor. Geniş iç hacmi ve keskin dış hatlarıyla size yakışan iş ortağınız oluyor. TDI teknolojisine
VHR ER ENERJİ GERİ KAZANIM CİHAZLARI VHR ER ENERGY RECOVERY UNITS
 ER ENERJİ GERİ KAZANIM CİHAZLARI ER ENERGY RECOVERY UNITS AKSESUARLAR ACCESSORIES Sayfa/Page 9~ VENCO ER enerji geri kazanım cihazları, rotorlu tip eşanjörü sayesinde, yüksek enerji tasarrufu sağlamak
ER ENERJİ GERİ KAZANIM CİHAZLARI ER ENERGY RECOVERY UNITS AKSESUARLAR ACCESSORIES Sayfa/Page 9~ VENCO ER enerji geri kazanım cihazları, rotorlu tip eşanjörü sayesinde, yüksek enerji tasarrufu sağlamak
YOL TAŞITI BOYUNA DİNAMİĞİ KURAL TABANLI KONTROLCÜLERİ YÜKSEK LİSANS TEZİ. Semih TUNACI. Makina Mühendisliği Anabilim Dalı
 İSTANBUL TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ YOL TAŞITI BOYUNA DİNAMİĞİ KURAL TABANLI KONTROLCÜLERİ YÜKSEK LİSANS TEZİ Semih TUNACI Makina Mühendisliği Anabilim Dalı Sistem Dinamiği ve Kontrol
İSTANBUL TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ YOL TAŞITI BOYUNA DİNAMİĞİ KURAL TABANLI KONTROLCÜLERİ YÜKSEK LİSANS TEZİ Semih TUNACI Makina Mühendisliği Anabilim Dalı Sistem Dinamiği ve Kontrol
Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır.
 ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
Wick Drain. Machines - 7 -
 Wick Drain - 6 - Wick Drain Machines It is applied in ground improving projects in construction areas in order to provide a vertical drainage for undersoil water. Wick drain is specially designed to lay
Wick Drain - 6 - Wick Drain Machines It is applied in ground improving projects in construction areas in order to provide a vertical drainage for undersoil water. Wick drain is specially designed to lay
ÇEVRESEL TEST HİZMETLERİ 2.ENVIRONMENTAL TESTS
 ÇEVRESEL TEST HİZMETLERİ 2.ENVIRONMENTAL TESTS Çevresel testler askeri ve sivil amaçlı kullanılan alt sistem ve sistemlerin ömür devirleri boyunca karşı karşıya kalabilecekleri doğal çevre şartlarına dirençlerini
ÇEVRESEL TEST HİZMETLERİ 2.ENVIRONMENTAL TESTS Çevresel testler askeri ve sivil amaçlı kullanılan alt sistem ve sistemlerin ömür devirleri boyunca karşı karşıya kalabilecekleri doğal çevre şartlarına dirençlerini
Otomatik boş vites. Dahili araç sinyalleri ve analog sinyaller kullanarak etkinleştirme
 Arka Plan Arka Plan Otomatik boş vites fonksiyonu BCI kontrol ünitesi (Bodywork Communication Interface) ile kontrol edilir. Otomatik boş vites dahili araç sinyalleri, analog sinyaller ve Harici CAN (Controller
Arka Plan Arka Plan Otomatik boş vites fonksiyonu BCI kontrol ünitesi (Bodywork Communication Interface) ile kontrol edilir. Otomatik boş vites dahili araç sinyalleri, analog sinyaller ve Harici CAN (Controller
15/01/2012 TARİHİNDEN İTİBAREN 2012 YILINDA UYGULANACAK KUSURLAR TABLOSU KODU ACIKLAMA KUSURGRUBU BAS_TAR BIT_TAR SINIFLAR 1 Aracın Tespiti 1.
 15/01/2012 TARİHİNDEN İTİBAREN 2012 YILINDA UYGULANACAK KUSURLAR TABLOSU KODU ACIKLAMA KUSURGRUBU BAS_TAR BIT_TAR SINIFLAR 1 Aracın Tespiti 1.1 Şasi No./Fabrika Tip Etiketi/Diğer Etiketler/Araç Ruhsatı
15/01/2012 TARİHİNDEN İTİBAREN 2012 YILINDA UYGULANACAK KUSURLAR TABLOSU KODU ACIKLAMA KUSURGRUBU BAS_TAR BIT_TAR SINIFLAR 1 Aracın Tespiti 1.1 Şasi No./Fabrika Tip Etiketi/Diğer Etiketler/Araç Ruhsatı
SÜRÜCÜ MAHALLİ
 4 - ELE ALIŞ SÜRÜCÜ MAHALLİ 1. Hız sabitleyici / sınırlayıcı kumandası. 2. Direksiyon ayarlama kumandası. 3. Aydınlatma ve sinyal lambaları kumandası. 4. Gösterge tablosu. 5. Sürücü Airbag'i. Korna. 6.
4 - ELE ALIŞ SÜRÜCÜ MAHALLİ 1. Hız sabitleyici / sınırlayıcı kumandası. 2. Direksiyon ayarlama kumandası. 3. Aydınlatma ve sinyal lambaları kumandası. 4. Gösterge tablosu. 5. Sürücü Airbag'i. Korna. 6.
SD130. Volvo sıkıştırıcılar 12,8-13,3 t 119 kw
 SD130 Volvo sıkıştırıcılar 12,8-13,3 t 119 kw Santrifüj gücü Yüksek santrifüj gücü ile yüksek silindir ağırlığının birleşimi, mükemmel sıkıştırmayı kolaylaştırır ve malzeme hedef derinliğine daha az geçişte
SD130 Volvo sıkıştırıcılar 12,8-13,3 t 119 kw Santrifüj gücü Yüksek santrifüj gücü ile yüksek silindir ağırlığının birleşimi, mükemmel sıkıştırmayı kolaylaştırır ve malzeme hedef derinliğine daha az geçişte
RX İnvertörlerde Frenleme Direnci Bağlantısı
 RX İnvertörlerde Frenleme Direnci Bağlantısı İÇİNDEKİLER Giriş Harici Frenleme Direnci(Dinamik) Kullanımı Frenleme Direnci/Ünitesi Boyutları ve Seçim Tablosu RX de Frenleme Direnci Bağlantıları RX de Frenleme
RX İnvertörlerde Frenleme Direnci Bağlantısı İÇİNDEKİLER Giriş Harici Frenleme Direnci(Dinamik) Kullanımı Frenleme Direnci/Ünitesi Boyutları ve Seçim Tablosu RX de Frenleme Direnci Bağlantıları RX de Frenleme
İpuçları, test ve onarım bilgileri: Disk freni
 15. Fren balatalarının montajı Gerekli kayıcı plakaları fren kaliperine yerleştirin. Fren balatalarının kılavuzlarını Bosch Superfit 5 000 000 150 ile yağlayın. Kesinlikle bakır içeren yağlayıcılar kullanmayın.
15. Fren balatalarının montajı Gerekli kayıcı plakaları fren kaliperine yerleştirin. Fren balatalarının kılavuzlarını Bosch Superfit 5 000 000 150 ile yağlayın. Kesinlikle bakır içeren yağlayıcılar kullanmayın.
Prof. Dr. Selim ÇETİNKAYA
 Prof. Dr. Selim ÇETİNKAYA Performans nedir? Performans nedir?... Performans: İcraat, başarı 1. Birinin veya bir şeyin görev veya çalışma biçimi; Klimaların soğutma performansları karşılaştırıldı."; Jetin
Prof. Dr. Selim ÇETİNKAYA Performans nedir? Performans nedir?... Performans: İcraat, başarı 1. Birinin veya bir şeyin görev veya çalışma biçimi; Klimaların soğutma performansları karşılaştırıldı."; Jetin