HİBRİD VE ELEKTRİKLİ ARAÇLAR
|
|
|
- Erol Demir
- 8 yıl önce
- İzleme sayısı:
Transkript
1 HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Yrd. Doç. Dr. Abdullah DEMİR «Her tercih bir vazgeçiştir»
 while D.C. motors are powered from direct current (D.C.), such as batteries, D.C. power supplies or an AC-to-DC power converter.")
2 GENEL HATIRLATMA What is the difference between an AC motor and a DC motor? / July 29, 2011 Q&A While both A.C. and D.C. motors serve the same function of converting electrical energy into mechanical energy, they are powered, constructed and controlled differently. 1 The most basic difference is the power source. A.C. motors are powered from alternating current (A.C.) while D.C. motors are powered from direct current (D.C.), such as batteries, D.C. power supplies or an AC-to-DC power converter. D.C wound field motors are constructed with brushes and a commutator, which add to the maintenance, limit the speed and usually reduce the life expectancy of brushed D.C. motors. A.C. induction motors do not use brushes; they are very rugged and have long life expectancies. The final basic difference is speed control. The speed of a D.C. motor is controlled by varying the armature winding s current while the speed of an A.C. motor is controlled by varying the frequency, which is commonly done with an adjustable frequency drive control. 2 1.Saeed Niku. Introduction to Robotics: Analysis, Control, Applications. 2nd ed. John Wiley & Sons, Inc., Page Robert S. Carrow. Electrician s technical reference: Variable frequency drives. Delmar Thomson Learning, Page 45 Published by Ohio Electric Motors: 673#ixzz2ezsrNvI3

3 DOĞRU AKIM ÖN BİLGİ Doğru Akım: Zamanla yönü ve şiddeti değişmeyen akıma doğru akım denir. İngilizce Direct Current kelimelerinin kısaltılması DC ile gösterilir. DC üreten kaynaklar şu şekilde sıralanabilir: Pil: Kimyasal enerjiyi elektrik enerjisine dönüştüren araçlara pil adı verilir. Akü: Kimyasal yolla elektrik enerjisi üreten araçtır. Dinamo: Hareket enerjisini DC elektrik enerjisine çeviren ünitelerdir. Doğrultmaç devresi: Alternatif akım elektrik enerjisini DC elektrik enerjisine çeviren devrelerdir. Güneş pili: Güneş enerjisini DC elektrik enerjisine çeviren elemanlara güneş pili denir. Doğru akımın yaygın olarak kullanıldığı alanlar: Haberleşme cihazlarında (telekomünikasyonda) Radyo, teyp, televizyon, gibi elektronik cihazlarda Redresörlü kaynak makinelerinde Maden arıtma (elektroliz) ve maden kaplamacılığında (galvonoteknik ) Elektrikli taşıtlarda (tren, tramvay, metro) Elektro-mıknatıslarda DC elektrik motorlarında

4 ALTERNATİF AKIM Alternatif Akımın Tanımı Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Alternatif Akımın Elde Edilmesi Alternatif akım ya da gerilimin elde edilmesinde alternatör denilen aygıtlar kullanılır. Not: Bilindiği gibi DC akım/gerilim değeri sabittir. Örneğin 1 V DC dediğimizde DC gerilimin 1 V olduğu anlaşılmaktadır. Fakat AC de akım/ve gerilim değerleri sürekli değişmektedir. Bu yüzden AC yi ifade etmek için çeşitli değerler kullanılmaktadır. Bunlar ani değer, maksimum (tepe) değer, tepeden tepeye değer, ortalama değer ve etkin değerdir. Frekans: Frekans, sinüs sinyalinin bir saniyede tekrarlanan saykıl sayısıdır. Periyot: Bir saykılın gerçekleşmesi için geçen süreye periyot denir. Periyot birimi saniye (s) dir ve T ile gösterilir.
5 TEMEL BİLGİLER Alternatif Akım Sinüs dalgasında periyot Sinüs dalgasında alternans

6 ELEKTRİK MOTORLARI Senkron ve Asenkron Kavramı Alternatif akım makinelerinin isimlendirilmesi ürettikleri döner manyetik alanın (stator manyetik alanı), döner mekanik kısım (rotor) ile eş zamanlı oluşu yada olmayışına göredir. Senkron: Uyumlu Olan, Eş zamanlı olan Asenkron: Uyumlu Olmayan, Eş zamanlı olmayan Senkron Makine: Stator manyetik alanı döner kısım devrine eşit olan makine. Asenkron Makine: Stator manyetik alanı döner kısım devrinden her zaman büyük olan makine.
, IGBT (Insulated gate bipolar transistor), IGCT (Insulated gate controlled thyristor) ve MCT (mos controlled thyristor) gibi yarı iletken")
7 GÜÇ KONTROL SİSTEMLERİ Elektrikli araç teknolojileri içerisinde güç elektroniği devreleri önemli bir yer tutmaktadır. MOSFET (metal oxide semiconductor field effect transistor), IGBT (Insulated gate bipolar transistor), IGCT (Insulated gate controlled thyristor) ve MCT (mos controlled thyristor) gibi yarı iletken anahtarların geliştirilmesi ile elektrik sistemlerinin kontrolünde önemli gelişmeler sağlanmıştır. Tahrik sisteminin kontrolü, üretilen AC gerilimin DC ye çevrilmesi, yakıt pili çıkış geriliminin düzenlenmesi, akü şarjının uygun yöntemlerle sağlanması vb., klasik güç elektroniği devrelerinin çeşitli kontrol yöntemleri kullanılarak kontrol edilmesiyle başarılmaktadır. Elektrikli araçlarda kullanılan güç kontrol sistemleri, klasik güç elektroniği devrelerinden oluşmaktadır. Bu devreler 4 ana başlık altında incelenebilir; Doğrultucular (AC/DC) Çeviriciler (DC/DC) Eviriciler (DC/AC) Kıyıcılar (AC/AC) AC/AC kıyıcılar, elektrikli araçlarda uygulama alanına sahip olmadığından bu bölümde incelenmeyecektir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

8 GÜÇ KONTROL SİSTEMLERİ Doğrultucular: Alternatif gerilimin doğru gerilime dönüştürülmesinde doğrultucular kullanılmaktadır. Doğrultucular kontrollü ve kontrolsüz olmak üzere 2 gruba ayrılmaktadırlar. İsimlerinden de anlaşılacağı gibi kontrolsüz doğrultucularda çıkış gerilimi kontrol edilmemekte ve ortalama çıkış gerilimi AC kaynaktaki gerilim değişimlerinden ve yükten etkilenmektedir. Kontrollü doğrultucularda ise kullanılan yarı iletken anahtarların anahtarlama açılarının kontrol edilmesiyle çıkış gerilimi ayarlanabilir sabit değerlerde tutulabilmektedir. Kontrolsüz Doğrultucular: Kontrolsüz doğrultucularda, yarı iletken anahtar olarak diyotlar kullanılmaktadır. Günümüzde en yaygın olarak kullanılan doğrultucu türleri köprü doğrultuculardır. Kontrollü Doğrultucular: Kontrollü doğrultucularda, anahtarlama için kontrollü yarı iletken anahtarlar kullanılır. Kontrollü doğrultucularda, anahtarların tetikleme açılarının kontrolü ile çıkış gerilimi sabit bir değerde tutulur. Bunun için çeşitli darbe genişlik modülasyonu (PWM) teknikleri kullanılmaktadır. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
9 "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003 GÜÇ KONTROL SİSTEMLERİ Doğrultucuların Elektrikli Araçlarda Kullanımı Hibrid elektrikli taşıtlarda kullanılan bara gerilimi DC dir. Bunun başlıca nedeni, kullanılan elektronik devrelerde senkronizasyon sorunu yaşanmaması, kontrol kolaylığı ve verimliliğin arttırılmasıdır. Ancak DC elektrik makinaları bakım gereksinimi ve ömürlerinin kısa olması gibi nedenlerle hibrid elektrikli araç uygulamalarında tercih edilmemektedir. HEA larda elektrik enerjisi üretimi genellikle AC çıkışlı generatörler ile sağlanır. Üretilen elektrik enerjisi DC baraya, doğrultucu devreleri ile bağlanır. Doğrultucuların, EA larda bir diğer kullanım alanı da akü şarj devreleridir. Akülerin şebekeden şarj edilebilmesi için kullanılan güç elektroniği sisteminin bir parçası da doğrultucu devreleridir. Şebeke gerilimi bir kontrolsüz doğrultucu ile doğrultulur. Daha sonra bir DC/DC çevirici ile uygun şarj algoritması kullanılarak akü şarj edilir. Şekil 1: Akü şarj sistemi

10 GÜÇ KONTROL SİSTEMLERİ Çeviriciler: DC-DC çevirici olarak da tanımlanan çeviriciler çoğunlukla regüle edilmemiş DC gerilim kaynağının, kontrollü bir biçimde sabit DC gerilime dönüştürülmesi için kullanılırlar. Regüle edilmemiş DC gerilim, genellikle bir kontrolsüz doğrultucu ile sağlanır. Aküler ve yakıt pilleri de regüle edilmemiş DC gerilim kaynağıdır. DC-DC çeviriciler anahtarlamalı güç kaynakları ve DC motor sürüş sistemlerinde oldukça geniş kullanım alanına sahiptir. Literatürde alçaltıcı (buck) ve yükseltici (boost) olmak üzere 2 temel çevirici topolojisinden söz edilmektedir. Alçaltıcı-yükseltici, flyback, forward çeviriciler, cuk çevirici, yarım körü çevirici, tam köprü çevirici ve sepic çevirici bu iki temel devrenin kombinasyonları ile türetilmiştir. Bahsi geçen tüm çeviricilerin tek, çift ve dört bölgede çalışan varyasyonları bulunmaktadır. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

11 GÜÇ KONTROL SİSTEMLERİ Alçaltıcı Çevirici: İsminden de anlaşılacağı üzere alçaltıcı çevirici DC giriş geriliminden daha düşük ortalama DC gerilim üretir. Endüktans yük akımındaki dalgalanmayı, kondansatör ise çevirici çıkış gerilimindeki dalgalanmayı azaltmak için kullanılır. Anahtar iletime geçtiğinde yük endüktans üzerinden beslenir. Yükseltici Çevirici: Yükseltici çevirici kullanılarak ortalaması giriş geriliminden daha yüksek olan çıkış gerilimi elde edilir. Anahtar iletime geçtiğinde endüktans üzerinde enerji depolanmaya başlanır ve kesime geçtiğinde kaynak ve endüktans geriliminin toplamı diyot üzerinden yükü besler. Çeviricilerin Kontrolü: DC-DC çeviricilerde ortalama DC çıkış gerilimi, giriş gerilimindeki dalgalanmaya veya yükteki bir değişmeye rağmen istenilen bir değerde sabit tutulmalıdır. Çeviriciler, DC gerilimi bir seviyeden diğerine çevirmek için bir veya birden fazla yarı iletken anahtar içerirler. DC-DC çeviricilerde ortalama DC çıkış gerilimi kullanılan bu anahtarların iletim ve kesim sürelerinin değiştirilmesiyle kontrol edilir. En yaygın kontrol yöntemi, sabit bir anahtarlama frekansında, anahtarın iletim süresinin ayarlanmasıdır. Darbe genişlik modülasyonu (PWM) adı verilen bu yöntemde, anahtarın iletim süresinin anahtarlama periyoduna oranı değiştirilir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
12 GÜÇ KONTROL SİSTEMLERİ Çeviricilerin Hibrid Elektrikli Araçlarda Kullanım Alanları: DC-DC çeviriciler, HEA larda farklı DC gerilim seviyesine sahip sistemlerin birbirine bağlanması ve DC motor kontrolü olmak üzere iki amaçla kullanılabilirler. Farklı gerilim seviyesine sahip DC sistemler yakıt pili, akü grubu veya alçak gerilim beslemesine ihtiyaç duyan elektronik devreler olabilir. Bara gerilimi, kullanılan akülerin birbirine seri bağlanması ile gerçekleştirilebilir. Örneğin 25 adet 12 V luk kurşun asit akünün seri bağlanması ile 300 V luk bara gerilimi oluşturulur. Bu durumda akü grubu için DC-DC çevirici kullanmaya gerek olmayabilir. Ancak yakıt pili sistemlerinin çıkış gerilimi genellikle bu seviyenin altında olduğundan, baraya güç yönetim sistemi adı da verilen DC-DC çevirici aracılığı ile bağlanır. Farklı seviyedeki DC gerilimlerin paralel bağlanması "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
 Çevirici kullanımına bir diğer neden de gerek akü gerekse de yakıt pilinin ideal gerilim kaynakları olmaması yani uç gerilimlerinin yüke ve diğer bazı koşullara göre değişim göstermesidir.")
13 GÜÇ KONTROL SİSTEMLERİ Çeviricilerin Hibrid Elektrikli Araçlarda Kullanım Alanları (dvm.) Çevirici kullanımına bir diğer neden de gerek akü gerekse de yakıt pilinin ideal gerilim kaynakları olmaması yani uç gerilimlerinin yüke ve diğer bazı koşullara göre değişim göstermesidir. Regüle edilmemiş güç kaynaklarının birbirine bağlanması kararlı olmayan bir yapı oluşmasına neden olur. HEA larda akü grubu, çeşitli yol koşullarında sistemi besler ve uygun durumlarda tekrar şarj edilir. Bu işlem için kullanılacak çevirici çift yönlü çalışabilmeli veya iki ayrı çevirici kullanılmalıdır. İki çevirici kullanımından ağırlık ve maliyet gibi nedenlerle kaçınılmaktadır. DC-DC çeviriciler DC motor sürücüsü olarak ta kullanılmaktadır. Bu çeviriciler bir, iki, üç ve dört bölgede çalışabilen sürücüler olarak sınıflandırılırlar. Birinci bölge motor çalışma için kullanılır ve akımın akış yönü kaynaktan yüke doğrudur. İkinci bölge ise geri kazanımlı frenleme içindir ve elektrik makinası generatör olarak çalışarak akımın kaynağa doğru akmasına neden olur. EA larda geri kazanımlı frenleme sürüş menzilinin arttırılması için çok önemlidir. Bu nedenle EA larda DC motor sürücüleri en azından iki bölgede çalışabilmelidir. Ters yönde çalışmanın mekanik anahtarlar yerine elektronik kontrolle yapılmasının istenmesi halinde dört bölgede çalışabilen çeviriciler kullanılır. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
 eviriciler asenkron, sürekli mıknatıslı motor kontrollerinde kullanılmaktadır.")
14 GÜÇ KONTROL SİSTEMLERİ Eviriciler: Eviriciler DC giriş gerilimini AC ye çeviren güç elektroniği devreleridir. Elektrikli taşıt tahrik sistemlerinde, 3 fazlı gerilim beslemeli PWM (Darbe genişlik modülasyonu) eviriciler asenkron, sürekli mıknatıslı motor kontrollerinde kullanılmaktadır. Günümüzde anahtarlama elamanı olarak çoğunlukla IGBT ler tercih edilmektedir. Eviriciler asenkron, senkron, sürekli mıknatıslı senkron motor hız kontrolünde kullanılabilir. Bu makinaların kontrolünde evirici çıkışı sinüzoidaldir. Sürekli mıknatıslı fırçasız doğru akım makinası kontrolünde ise fazlar kare dalga ile beslenir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

15 GÜÇ ÜRETİM VE TAHRİK SİSTEMLERİ Tümü-elektrikli ve HEA larda kullanılan tahrik sistemleri elektrik motoru, güç elektroniği ve kontrol ünitelerinden oluşur. HEA lardaki elektrik tahrik sistemlerinin seçimi, esas olarak üç faktöre bağlıdır. Bunlar; sürücünün beklentileri, araç kısıtları ve enerji kaynaklarıdır. Sürücünün beklentileri; ivmelenme, en yüksek hız, tırmanma kabiliyeti, frenleme ve menzil özelliklerini içeren sürüş profili ile tanımlanır. Araç kısıtları aracın çeşidine, araç ağırlığına ve aracın taşıdığı yüke bağlıdır. Enerji kaynakları ise aküler, yakıt pilleri, süperkapasitörler, volanlar ve değişik hibrid kaynaklarla ilgilidir. Geçmişte kontrolünün kolay olması nedeniyle tercih edilen DC motor türleri, günümüzde güç elektroniği alanında yaşanan gelişmeler sonucunda yerlerini AC motorlara bırakmaktadır. Fırça-kolektör bakım gereksinimi DC motor kullanımının azalmasındaki en önemli faktördür. Güç elektroniği ve kontrol teknolojilerinde gelinen noktada, asenkron motor hız kontrolü problem olmaktan çıkmış ve endüstride oldukça yaygın olarak kullanılan bu motor EA larda kullanım imkanına kavuşmuştur. Özellikle kısa devre kafesli asenkron motorlar, üretimin kolaylığı, maliyet avantajı ve sağlam yapısı nedenleri ile tercih edilmektedir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
 synchronous machines PM brushless DC machines and switched reluctance machines")
16 ELEKTRİK MOTORLARI Elektrikli araç tahrik sistemlerinde başlıca 4 elektrik motoru kullanılmaktadır. DC motor Asenkron motor Sürekli mıknatıslı motor Anahtarlamalı relüktans motoru Induction machines permanent magnet (PM) synchronous machines PM brushless DC machines and switched reluctance machines (SRMs) EV lerde Kullanılan Elektrik Motorları Asenkron Motor (Induction Motor) Sürekli Mıknatıslı Fırçasız Senkron Motor (BLSM) Sürekli Mıknatıslı Fırçasız DA Motoru (BLDCM) Anahtarlamalı Relüktans Motoru (SRM) Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
17 ELEKTRİK MOTORLARI Advances in electric machines, along with progress in power electronics, are the key enablers for electric, hybrid electric, and plugin hybrid electric vehicles (HEVs). Induction machines, permanent magnet (PM) synchronous machines, PM brushless DC machines, and switched reluctance machines (SRMs) have all been considered in various types of vehicle powertrain applications [1 20]. Brushed DC motors, once popular for traction applications such as in streetcars, are no longer considered a proper choice due to the bulky construction, low efficiency, the need for maintenance of the brush and commutator, high electromagnetic interference (EMI), low reliability, and limited speed range. When using electric motors for powertrain applications, there are a few possible configurations. Today s electric motors, combined with inverters and associated controllers, have a wide speed range for constant torque operations, and an extended speed range for constant power operations, which make the design of the powertrain much easier. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.
18 ELEKTRİK MOTORLARI Depending on the configuration of the hybrid powertrain, the design and selection of electric motor drives can also be different. For example, for series hybrid vehicles, the powertrain motor needs to be able to provide the required torque and speed for all driving conditions. Hence, the size of the motor will be fairly large, usually rated at 100 kw or more for passenger cars. A PM motor or an induction motor is the preferred choice. For mild and micro hybrids, only a small-size motor of a few kilowatts is required. Therefore the motor can be a claw pole DC motor, or a switched reluctance motor. Traditional automatic transmission or continuous variable transmission (CVT) used in conventional cars are no longer required in electric vehicles (EVs) and many HEVs. However, a fixed gear ratio speed reduction is often necessary. This is due to the fact that a high-speed motor has smaller size and less weight than a low-speed machine. A two-speed automatic transmission may be beneficial in saving vehicle energy consumption. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

19 DOĞRU AKIM MOTORLARI DC motorlar, bir manyetik alan içerisinde bir iletkenden akım geçirilmesi sonucunda, o iletkene kuvvet etki etmesi prensibiyle çalışırlar. DC motorlarda manyetik alanın oluşturulması için statorda bir alan sargısı ve rotorda da dönme hareketinin sağlanması içinde bir endüvi sargısı bulunur. DC gerilim dönen kısma da uygulandığından fırça kolektör düzeneği kullanılmaktadır. Bu düzenek DC motorun bakım gereksinimini arttırmakta ve sanayide olduğu gibi EA larda da kullanımının azalmasına neden olmaktadır. DC motorlar alan sargısının türüne göre serbest uyarmalı, seri uyarmalı, paralel uyarmalı ve kompund uyarmalı olmak üzere 4 e ayrılırlar. Şekilde DC motor türlerinin şematik resimleri görülmektedir. Serbest uyarmalı DC motorlarda, uyarma sargısı ve besleme sargısı elektriksel olarak birbirinden bağımsız olan iki kaynaktan beslenir. Seri uyarmalı DC motor da uyarma sargısı ve endüvi sargısı birbirine seri, paralelde ise paralel olarak bağlanmıştır. Kompund motor bu iki türün birleştirilmesiyle elde edilir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
20 DOĞRU AKIM MOTORLARI "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

21 DOĞRU AKIM MOTORLARI Kompund motorlar ise seri ve paralel motorun kombinasyonudur. Uyarma sargılarının birbirine göre ters veya düz sarılması ile farklı karakteristikler gösteririler. Hız kontrolü, endüviye uygulanan gerilimin arttırılması veya uyarma sargısından akan akımın azaltılması ile sağlanır. Ters yönde çalışma için ise endüvi sargısı ya da uyarma sargısından birine uygulanan gerilim yön değiştirilmektedir. DC makinalar kolay kontrol edilebilmesi, moment ve akı kontrolünün bağımsız olarak sağlanabilmesi ve yerleşmiş üretim teknolojisi gibi üstünlüklerine rağmen, yüksek bakım gereksinimine yol açan fırça aşınmaları, düşük nominal hız, komütatör nedeniyle oluşan yüksek elektromanyetik girişim, düşük özgül güç oranı (W/kg) ve düşük verimlilik gibi dezavantajları vardır. EA larda tahrik için DC motor kullanılması durumunda, hız kontrol bölgesinin arttırılabilmesi için endüvi kontrolü ve alan kontrolü birleştirilmelidir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

22 ASEKRON MOTORLAR Dışta AC gerilimin uygulandığı stator sargıları, içte ise akım taşıyan iletkenlerin bulunduğu rotordan oluşur. Stator sargısına uygulanan 3 fazlı AC gerilim döner manyetik alan oluşturur. Bu manyetik alan rotorda gerilim endükler ve rotor sargılarından akım akmaya başlar. Asenkron motorun iki türü bulunmaktadır: Kısa devre kafesli asenkron motor Bilezikli asenkron (rotoru sargılı) motor Gerilim/frekans (V/F) oranının sabit tutulması prensibine dayanan klasik asenkron motor hız kontrol yöntemine skalar kontrol adı verilir. Asenkron motor sürekli hal devre eşitlikleri temel alınarak geliştirildiğinden, dinamik durumlarda ve düşük hızlarda zayıf performans gösterir. EA larda motor sürücü performans gereksinimleri, skalar kontrol yöntemin ile sağlanamayacak kadar zorludur. Bunun yerine çoğunlukla vektör kontrol yöntemi kullanılır. Vektör kontrol yöntemi, motora uygulanan gerilimin genliği ve faz açısının kontrolünü içerir. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
23 ASEKRON MOTORLAR Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
24 ASEKRON MOTORLAR Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
25 KISACA: ASEKRON MOTORLAR Basit Yapı Kolay Üretim Ucuzluk Oturmuş teknoloji Moment üretim kapasitesi orta düzeyde Göreli olarak yüksek ısınma Geri kazanım özelliği orta düzeyde Örnek uygulama: TeslaEV Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
26 FIRÇASIZ SENKRON MOTOR Fırçasız Senkron Motor Fırçasız Doğru Akım Motoru Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
 Mıknatıs montajı mıknatıslama (IPM, SM) Pahalı (Çin mıknatıs kotası) Moment üretim kapasitesi yüksek düzeyde Geri kazanım özelliği yüksek Uygulama örnekleri: Nissan")
27 FIRÇASIZ SENKRON MOTOR Fırçasız Senkron Motor Fırçasız Doğru Akım Motoru Kolay Üretim (?) Mıknatıs montajı mıknatıslama (IPM, SM) Pahalı (Çin mıknatıs kotası) Moment üretim kapasitesi yüksek düzeyde Geri kazanım özelliği yüksek Uygulama örnekleri: Nissan Leaf, Toyota Prius, BMW Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi

28 SÜREKLİ MIKNATISLI MOTORLAR Manyetik alan yaratmak için uyarma sargılarının yerine mıknatıs kullanılan motorlardır. Bu yöntem, rotor bakır kayıplarını ve uyarma devresi bakım gereksinimini ortadan kaldırır. Sürekli mıknatıslı motorlar (SM) genellikle 2 gruba ayrılırlar: SM Senkron makinalar: Bu makinalar, asenkron makinalardaki gibi düzenli olarak dönen stator alanına sahiptir. Kare Dalga SM makinalar: Fırçasız DC makina olarak da adlandırılırlar. Stator sargıları ayrık zamanlarda kare dalga ile beslenirler. Sürekli mıknatıslı makinalarda çoğunlukla ferritler, samaryum kobalt (SmCo) ve neodmiyum-demir boron (NdFeB) olmak üzere 3 tip mıknatıs kullanılır. SM makinalar için en büyük tehlike, yüksek ısı ve yük koşullarının, mıknatısların özelliklerini kaybetmelerine neden olabilmesidir. Bunu için SM makina tasarımında mıknatıs korunmasına yönelik uygun önlemler alınır. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003
29 SÜREKLİ MIKNATISLI MOTORLAR Aynı güç oranında, sürekli mıknatıslı motorun boyutları asenkron motora göre daha küçüktür. Rotor bakır kayıpları olmaması soğutma açısından SM motorlara avantaj sağlamaktadır. Buna karşın asenkron motor fiyat açısından SM motora üstünlük sağlamaktadır. Sürekli mıknatıslı senkron motorun hız kontrolünde vektör kontrol yöntemi kullanılabilir. Motor sürekli senkron hızda döndüğünden vektör kontrolün uygulanmasını kolaylaştırmaktadır. Ancak SM senkron motor hız kontrolünde yüksek çözünürlüklü pozisyon sensörü kullanılmalıdır. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

30 ANAHTARLAMALI RELÜKTANS MOTOR Anahtarlamalı relüktans makinasının (SRM) en belirgin özelliği rotorunda mıknatıs veya sargı olmaması ve statorunda bağımsız faz sarımlarının olmasıdır. Rotor ve stator, ince manyetik çelik tabakaların üst üste konulmasıyla oluşturulur. Anahtarlamalı relüktans motorları basit yapı ve düşük üretim maliyeti avantajlarına sahiptirler ve elektrikli araç tahrik sistemi için moment-hız karakteristiğini karşılamaktadırlar. SRM kayıplarının çoğunun statorda oluşması, soğutma açısından kolaylık sağlamaktadır. Yapısındaki basitliğine karşın, tasarım ve kontrolünde basitlik içermez. Kutup uçlarındaki şiddetli doyma ve kutupların saçak etkisinden dolayı, tasarım ve kontrolü zor ve karmaşıktır. Aynı zamanda, genellikle akustik gürültü problemi gösterirler. SRM nin en önemli dezavantajlarından biride moment karakteristiğindeki dalgalanmadır. "ELEKTRİKLİ ARAÇLAR", TÜBİTAK Marmara Araştırma Merkezi Enerji Sistemleri ve Çevre Araştırma Enstitüsü, Eylül 2003

31 ANAHTARLAMALI RELÜKTANS MOTOR Çok Basit Yapı Kolay Üretim Ucuz Moment üretim kapasitesi orta düzeyde Moment dalgalılığı ve yüksek gürültü Geri kazanım özelliği düşük Akademik merak konusu Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
32 Klasik ICE Teknolojisi ve Elektrik Motoru Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
33 Klasik ICE Teknolojisi ve Elektrik Motoru Özgür ÜSTÜN, Elektrikli Otomobiller, İstanbul Teknik Üniversitesi
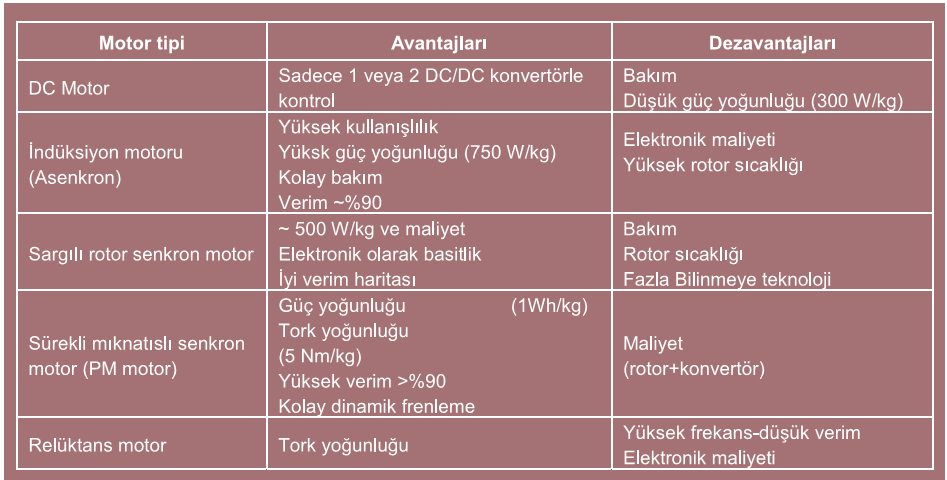
34 KIYASLAMA
35 KIYASLAMA (dvm.)
36 KIYASLAMA (dvm.) Table: Typical Electric Motors kw Parameters
37 KIYASLAMA (dvm.) Table: Electric Motors Properties Comparison
38 KIYASLAMA (dvm.) Table 1. BEV and PHEV parameters comparison
39 ELEKTRİK MOTORLARI-ÖRNEKLER Alternatif 1 Alternatif 2 Alternatif 3 Alternatif 4 Alternatif 5 Alternatif 6 Alternatif 7 Üretici Firma UQM UQM Ansaldo Ansaldo Solectria Enova MES Model Numarası SR 218N SR 286 A1H207C A1H256B AC55 EDM90 MES Tip Fırçasız PM Fırçasız PM Asenkron Asenkron Asenkron Asenkron asenkron Sürekli Güç [kw] Maksimum Güç [kw] ,8 Sürekli Tork [Nm] Maksimum Tork [Nm] Maksimum Hız [rpm] Maksimum Verim [%] Çap [mm] Uzunluk [mm] Ağırlık [kg] Kontrolcü Ağırlığı [kg] 15,9 15, , Kontrolcü Boyutları 380x365x11 380x365x11 326x212x11 430x330x x320x x235x x518x201 [mm] Voltaj [VDC] Tırmanma Kabiliyeti % 15lik Egim [E/H] H E H E H E %15 lik Eğimde 10km/h Hıza Çıkma Süresi [s] s s s Maksimum Tırmanma Kabiliyeti 11% 29% 12% 23% 11% 15% Maksimum Eğimde İvmelenme Zamanı [s] s 5 32 s s 5 27 s s Düz Yolda 40km/h Hıza Çıkana Kadar Geçen Zaman [s] 10 s 4 s 9 s 5 s 10 s 7.2 s s

40 EK OKUMA VE İNCELEMELER
41 OKUMA PARÇASI: ASEKRON MOTORLAR Induction Motor (Asenkron Motor) Drives Induction motors are popular choices for traction applications due to their robust construction, low cost, wide field weakening range, and high reliability. Especially for EVs, PHEVs, and HEVs that requires a high-power motor, induction motors can provide more reliable operation than other types of electric motors [21 37]. However, when compared to PM motors, induction motors have lower efficiency and less torque density. Typical induction motors used for traction applications are squirrel cage induction motors. An inverter is used to control the motor so that the desired torque can be delivered for a given driving condition at a certain speed. Advanced control methodologies, such as vector control, direct torque control, and field-oriented control, are popular in induction motor control for traction applications. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.
 and the rotor (which houses the squirrel cage).")

42 OKUMA PARÇASI: ASEKRON MOTORLAR Principle of Induction Motors The basic structure of an induction machine is shown in Figure 1. The two main parts of an induction motor are the stator (which houses the winding) and the rotor (which houses the squirrel cage). Both stator and rotor are made out of laminated silicon steel with thickness of 0.35, 0.5, or 0.65 mm. The laminated steel sheets are first stamped with slots and are then stacked together to form the stator and rotor, respectively. Windings are put inside the stator slots while the rotor is cast in aluminum. There are some additional components to make up the whole machine: the housing that encloses and supports the whole machine, the shaft that transfers torque, the bearing, an optional position sensor, and a cooling mechanism (such as a fan or liquid cooling tubes). Figure 1 An induction motor: (a) rotor and stator assembly; (b) rotor squirrel cage; and (c) cross-sectional view of an ideal induction motor with six conductors on the stator Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

43 OKUMA PARÇASI: ASEKRON MOTORLAR Hence, we will have three approaches for changing the speed of an induction motor: change the number of poles, change frequency, and change slip: 1. Change the number of poles: The stator winding is designed such that, by changing the winding configuration, the number of poles will change. For example, some induction motors are designed as 4/6, 6/8, or 4/8 pole capable. While changing the number of poles has been used in controlling the induction motor speed in the past, it is used less and less today due to the complexity of the stator winding configuration and low efficiency. 2. Change the frequency of the supply voltage: This is the most popular method for controlling induction motor speed in modern drive systems, including traction drives. 3. Change slip: Since the electromagnetic torque of an induction motor is closely related to slip, there are a few ways to change the slip to control induction motor speed: (a) Change the magnitude of the supply voltage: As the voltage is changed, the speed of the motor is also changed. However, this method provides limited variable speed range since the torque is proportional to the square of voltage. (b) Change stator resistance or stator leakage inductance: This can be done by connecting a resistor or inductor in series with the stator winding. (c) Change rotor resistance or rotor leakage inductance: This is only applicable to woundrotor induction motors. (d) Apply an external voltage to the rotor winding: This voltage has the same frequency as the rotor back emf or rotor current. Modern, doubly fed wind power generators belong to this group. This method is only applicable to wound-rotor induction motors. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

44 OKUMA PARÇASI: PERMANENT MAGNET MOTOR DRIVES PM motors are the most popular choices for EV and HEV powertrain applications due to their high efficiency, compact size, high torque at low speeds, and ease of control for regenerative braking [43 90]. The PM motor in a HEV powertrain is operated either as a motor during normal driving or as a generator during regenerative braking and power splitting, as required by the vehicle operations and control strategies. PM motors with higher power densities are also now increasingly the choice for aircraft, marine, naval, and space applications. The most commercially used PM material in traction drive motors is neodymium ferrite boron (Nd Fe B). This material has a very low Curie temperature and high temperature sensitivity. It is often necessary to increase the size of magnets to avoid demagnetization at high temperatures and high currents. On the other hand, it is advantageous to use as little PM material as possible in order to reduce the cost without sacrificing the performance of the machine. Not: Curie sıcaklığı, ferromanyetik bir maddenin, kalıcı mıknatıslığını yitirip paramanyetik hale geçtiği kritik sıcaklıktır. Curie sıcaklığının üstünde, ısı enerjisi manyetik momentlerin rastgele yönelmelerine sebep olur ve madde paramanyetik hale geçer. Paramanyetizma alanında çalışan Pierre Curie'nin anısına bu sıcaklığa Curie sıcaklığı denmektedir. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

45 OKUMA PARÇASI: PERMANENT MAGNET MOTOR DRIVES Basic Configuration of PM Motors When PMs are used to generate the magnetic field in an electric machine, it becomes a PM motor. Both DC and AC motors can be made with PMs. Only PM synchronous motors and PM brushless DC motors are chosen for modern traction drives. A PM synchronous motor contains a rotor and a stator, with the stator similar to that of an induction motor, and the rotor contains the PMs. From the section on induction motors, we know that the three-phase winding, with three-phase symmetrical AC supply, will generate a rotating magnetic field. To generate a constant average torque, the rotor must follow the stator field and rotate at the same synchronous speed. This is also why these machines are called PM synchronous motors. There are different ways to place the magnets on the rotor, as shown in Figure 2. If the magnets are glued on the surface of the rotor, it is called a surfaced-mounted PM motor or SPM motor. If the magnets are inserted inside the rotor in the pre-cut slots, then it is called an interior permanent magnet motor or IPM motor. For a SPM motor, the rotor can be a solid piece of steel since the rotor iron core itself is not close to the air gap, hence the eddy current loss and hysteresis loss due to slot/tooth harmonics can be neglected. For the IPM motor, the rotor needs to be made out of laminated silicon steel since the tooth/slot harmonics will generate eddy current and hysteresis losses. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.
 Due to the large air gap as well as the fact that the magnets have a permeability similar to that of air, SPM motors have similar direct-axis reactance xd and quadrature-axis reactance xq.")
46 OKUMA PARÇASI: PERMANENT MAGNET MOTOR DRIVES Basic Configuration of PM Motors (cont.) Due to the large air gap as well as the fact that the magnets have a permeability similar to that of air, SPM motors have similar direct-axis reactance xd and quadrature-axis reactance xq. On the other hand, IPM motors have different xd and xq. This difference will generate a so-called reluctance torque. It is worth pointing out that although there is a reluctance torque component, it does not necessarily mean an IPM motor will have a higher torque rating than a SPM motor for the same size and same amount of magnetic material used. This is because, in IPM motors, in order to keep the integrity of the rotor laminations, there are so-called magnetic bridges that will have leakage magnetic flux. So for the same amount of magnet material used, a SPM motor will always have higher total flux. There are many different configurations for IPM motors as shown in Figure 3. Figure 2: Surfacemounted magnets and interior magnets: left, SPM motor; right, IPM motor. 1 magnet; 2 iron core; 3 shaft; 4 nonmagnet material; 5 non magnet material Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.
, the rotating magnetic field will generate three-phase voltage in the three-phase windings.")
47 OKUMA PARÇASI: PERMANENT MAGNET MOTOR DRIVES Basic Principle and Operation of PM Motors The no-load magnetic field of PM machines is shown in Figure 3. When the rotor is driven by an external source (such as an engine), the rotating magnetic field will generate three-phase voltage in the three-phase windings. This is the generator mode operation of the PM machine. When operated as a motor, the three-phase windings, similar to those of an induction motor, are supplied with either a trapezoidal form of current (brushless DC) or sinusoidal current (synchronous AC). These currents generate a magnetic field that is rotating at the same speed as the rotor, or synchronous speed. By adjusting the frequency of the stator current, the speed of the rotor or the synchronous speed can be adjusted accordingly. The torque is the attraction between the rotor magnetic field and the stator magnetic field in the circumferential direction. Hence, at no-load conditions, the rotor and the stator field are almost lined up. When the angle between the rotor field and the stator field reaches 90 electric degrees, the maximum torque is reached in SPM motors. For IPM motors, the maximum torque occurs at an angle slightly larger than 90 due to the existence of reluctant torque. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.
 rectangular slots IPM motor; and (d) V-type slots IPM motor Chris Mi, M.")
48 OKUMA PARÇASI: PERMANENT MAGNET MOTOR DRIVES Figure 3: Four commonly used IPM rotor configurations: (a) circumferential-type magnets suitable for brushless DC or synchronous motor; (b) circumferential-type magnets for line-start synchronous motor; (c) rectangular slots IPM motor; and (d) V-type slots IPM motor Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

49 OKUMA PARÇASI: Magnetic Circuit Analysis of IPM Motors Although today s motor design is usually aided by finite element analysis (FEA), the initial design stages are still realized through analytical methods. Air-gap flux is one of the most important parameters of PM motor designs and equivalent magnetic circuit analysis is used to calculate the air-gap flux in PM motors. For SPM motors, the equivalent magnetic circuit is straightforward. But for IPM motors, the PMs are buried inside the rotor laminations, with magnets inserted into the pre-stamped slots. This arrangement protects the magnets from flying away from the rotor surface due to centrifugal force, fatigue, and aging of material during operation of the motor. Another advantage of IPM motors is that rectangular (cuboid) magnets can be used to simplify the manufacturing process and reduce the cost of manufacturing PM material. Flux concentration structures (such as magnets arranged in a V-shape) are often used to increase air-gap flux density in IPM motors [85]. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

50 OKUMA PARÇASI: Magnetic Circuit Analysis of IPM Motors Calculating air-gap flux in IPM motors is somewhat troublesome due to the existence of so-called magnetic bridges. When an integrated lamination is used for IPM motors, magnetic short circuits exist around the edges of the magnets. These magnetic bridges are designed to enhance the integrity of the rotor. The magnetic bridges introduce magnetic short circuits and complicate the design and analysis of IPM motors. On the other hand, there are also concerns about how to limit the leakage flux in these magnetic bridges while maintaining the mechanical strength of the rotor. The flux leakage and flux distribution in the magnetic bridges can be precisely obtained through numerical methods such as FEA. However, FEA can only be performed after the preliminary dimensions of the motor have been determined. FEA is also cumbersome and time consuming in the early stages of PM motor design where numerous iterations are usually performed. Analytical calculation and analysis of all types of PM motors are essential in their early design stage. This section discusses the analytical method to calculate the air-gap flux of IPM machines using an equivalent magnetic circuit model taking into account the assembly gap and saturation in the steel. Factors that affect the flux leakage in an IPM motor will also be discussed. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.

51 OKUMA PARÇASI: Sizing of Magnets in PM Motors Sizing of magnets is one of the critical tasks of PM machine design. This section discusses the analytical methods to calculate the volume and size of magnets for PM motors. The proposed methods are validated by FEA and experiments [91]. The formulas will be derived based on a set of assumptions and then modified based on practical design considerations. The assumptions include the following: Magnetic pole salience can be neglected The stator resistance is negligible. Saturation can be neglected. The air-gap flux is sinusoidally distributed. Chris Mi, M. Abul Masrur, David Wenzhong Gao, Hybrid Electric Vehicles - Principles And Applications With Practical Perspectives, ISBN , 2011.
52 Functional block diagram of a typical electric propulsion system Mehrdad Ehsani, Yimin Gao, Ali Emadi, "Modern Electric, Hybrid Electric, and Fuel Cell Vehicles", 2010.
53 ÖRNEKLER
54 Battery weight 2 x 140 kg Total weight: 1660 kg Low mounted batteries for low centre of gravity Weight distribution front / rear 56 / 44 (60/40 C30) Li-Ion batteries 400 V / Capacity 24 kwh [8 230 V/16 A] Electric motor 82 kw (111 hk) Torque 220 Nm Acceleration 0-70 km/h 6.0 s / km/h 10.9 s Top speed 130 km/h Practical driving range up to 150 km [NEDC 163 km] Consumption: 15 kwh/100 km Pure Electric, 0 g CO2 tail pipe emissions Johan Konnberg - Volvo Car Electrification Strategy,
55 PDU [Power Distribution Unit] Inverter DC/DC converter Battery 12 kwh Battery 12 kwh OBC [On Board Charger] Electric driven AC-compressor Connector Electric motor 230 V AC cable Johan Konnberg - Volvo Car Electrification Strategy,
56 Peak power 89 kw (120 bhp) Torque 250 Nm 0 70 km/h in 5,9 seconds Top speed 125 km/h Technology intended for large scale production with automotive standard Johan Konnberg - Volvo Car Electrification Strategy,
57
HİBRİD VE ELEKTRİKLİ ARAÇLAR
 HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Abdullah DEMİR, Yrd. Doç. Dr. «Her tercih bir vazgeçiştir» GENEL HATIRLATMA What is the difference between an AC motor and a DC motor? / July 29, 2011 Q&A
HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Abdullah DEMİR, Yrd. Doç. Dr. «Her tercih bir vazgeçiştir» GENEL HATIRLATMA What is the difference between an AC motor and a DC motor? / July 29, 2011 Q&A
00322 ELECTRICAL MACHINES-II Midterm Exam
 Name : ID : Signature : 00322 ELECTRICAL MACHINES-II Midterm Exam 20.04.2017 S.1) S.2) S.3) S.4) A shunt DC motor is rated 7.5kW, 250 V and is connected to 230V source. The armature resistance is Ra 0.2,
Name : ID : Signature : 00322 ELECTRICAL MACHINES-II Midterm Exam 20.04.2017 S.1) S.2) S.3) S.4) A shunt DC motor is rated 7.5kW, 250 V and is connected to 230V source. The armature resistance is Ra 0.2,
Electric Vehicles- 4 EVs V s 4
 Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ
 GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket
GERİ KAZANIMLI FREN SİSTEMİ "REGENERATIVE ENERGY" REGEN ENERGY REJENERATİF ENERJİ Frenleme mesafesi; taşıtın hızına, yüküne, yol ve lastik durumuna, frenlerin durumuna ve fren zayıflamasına bağlıdır. Hareket
HİBRİD VE ELEKTRİKLİ ARAÇLAR
 HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Abdullah DEMİR, Yrd. Doç. Dr. «Her tercih bir vazgeçiştir» GENEL TEKRAR Why is Electromobility Interesting Self Study Program 820233, Basics of Electric
HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Abdullah DEMİR, Yrd. Doç. Dr. «Her tercih bir vazgeçiştir» GENEL TEKRAR Why is Electromobility Interesting Self Study Program 820233, Basics of Electric
HİBRİD VE ELEKTRİKLİ ARAÇLAR
 HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Abdullah DEMİR, Dr. «Her tercih bir vazgeçiştir» Electrification Level of EVs Electric Vehicle Architectures, Nan Qin, Electric Vehicle Transportation Center,
HİBRİD VE ELEKTRİKLİ ARAÇLAR ELEKTRİK MOTORLARI Abdullah DEMİR, Dr. «Her tercih bir vazgeçiştir» Electrification Level of EVs Electric Vehicle Architectures, Nan Qin, Electric Vehicle Transportation Center,
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Eleco 2014 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 2014, Bursa
 Eleco 214 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 214, Bursa Fırçasız, Dış Rotorlu Elektrikli Bisiklet Motoru Tasarımı, Üretimi Ve Deneysel Doğrulaması Design,
Eleco 214 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 214, Bursa Fırçasız, Dış Rotorlu Elektrikli Bisiklet Motoru Tasarımı, Üretimi Ve Deneysel Doğrulaması Design,
Güç elektroniği elektrik mühendisliğinde enerji ve elektronik bilim dalları arasında bir bilim dalıdır.
 3. Bölüm Güç Elektroniğinde Temel Kavramlar ve Devre Türleri Doç. Dr. Ersan KABALC AEK-207 GÜNEŞ ENERJİSİ İLE ELEKTRİK ÜRETİMİ Güç Elektroniğine Giriş Güç elektroniği elektrik mühendisliğinde enerji ve
3. Bölüm Güç Elektroniğinde Temel Kavramlar ve Devre Türleri Doç. Dr. Ersan KABALC AEK-207 GÜNEŞ ENERJİSİ İLE ELEKTRİK ÜRETİMİ Güç Elektroniğine Giriş Güç elektroniği elektrik mühendisliğinde enerji ve
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
3. ELEKTRİK MOTORLARI
 3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
ASTES ASANSÖR SAN. ve TİC. A.Ş.
 ASTES ASANSÖR SAN. ve TİC. A.Ş. ASANSÖR MAKİNALARI ELEVATOR MACHINES Bilgi Deneyim Yüksek teknoloji Know how Experience High-tech 13.000 m² alana sahip yeni tesisimizde en son teknoloji ve kalitede asansör
ASTES ASANSÖR SAN. ve TİC. A.Ş. ASANSÖR MAKİNALARI ELEVATOR MACHINES Bilgi Deneyim Yüksek teknoloji Know how Experience High-tech 13.000 m² alana sahip yeni tesisimizde en son teknoloji ve kalitede asansör
Servo Motor. Servo Motorların Kullanıldığı Yerler
 Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
ASTES ASANSÖR SAN. ve TİC. A.Ş.
 ASTES ASANSÖR SAN. ve TİC. A.Ş. ASANSÖR MAKİNALARI ELEVATOR MACHINES Bilgi Deneyim Yüksek teknoloji Know how Experience High-tech 13.000 m² alana sahip yeni tesisimizde en son teknoloji ve kalitede asansör
ASTES ASANSÖR SAN. ve TİC. A.Ş. ASANSÖR MAKİNALARI ELEVATOR MACHINES Bilgi Deneyim Yüksek teknoloji Know how Experience High-tech 13.000 m² alana sahip yeni tesisimizde en son teknoloji ve kalitede asansör
Bölüm 1 Güç Elektroniği Sistemleri
 Bölüm 1 Güç Elektroniği Sistemleri Elektrik gücünü yüksek verimli bir biçimde kontrol etmek ve formunu değiştirmek (dönüştürmek) için oluşturlan devrelere denir. Şekil 1 de güç girişi 1 veya 3 fazlı AA
Bölüm 1 Güç Elektroniği Sistemleri Elektrik gücünü yüksek verimli bir biçimde kontrol etmek ve formunu değiştirmek (dönüştürmek) için oluşturlan devrelere denir. Şekil 1 de güç girişi 1 veya 3 fazlı AA
Unlike analytical solutions, numerical methods have an error range. In addition to this
 ERROR Unlike analytical solutions, numerical methods have an error range. In addition to this input data may have errors. There are 5 basis source of error: The Source of Error 1. Measuring Errors Data
ERROR Unlike analytical solutions, numerical methods have an error range. In addition to this input data may have errors. There are 5 basis source of error: The Source of Error 1. Measuring Errors Data
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1. HAFTA 1 İçindekiler Elektrik Makinalarına Giriş Elektrik Makinalarının
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1. HAFTA 1 İçindekiler Elektrik Makinalarına Giriş Elektrik Makinalarının
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Darbeli Kırıcılar Impact Crushers
 Darbeli Kırıcılar Impact Crushers TK15-TK16 Serisi Darbeli Kırıcılar TK15-TK16 Series Impact Crushers TK15 ve TK16 darbeli kırıcılar, tesiste sekonder veya tersiyer olarak kullanılabilir özellikte kırıcılardır.
Darbeli Kırıcılar Impact Crushers TK15-TK16 Serisi Darbeli Kırıcılar TK15-TK16 Series Impact Crushers TK15 ve TK16 darbeli kırıcılar, tesiste sekonder veya tersiyer olarak kullanılabilir özellikte kırıcılardır.
HIGH SPEED PRECISION SPINDLES YÜKSEK DEVİRLİ HASSAS İŞ MİLLERİ. www.simaksan.com.tr
 HIGH SPEED PRECISION SPINDLES YÜKSEK DEVİRLİ HASSAS İŞ MİLLERİ www.simaksan.com.tr HAKKIMIZDA SİMAKSAN MAKİNE ELEKTRİK ELEKTRONİK SAN.TİC.LTD.ŞTİ 2006 yılında CNC takım tezgahlarına servis hizmetleri sunmak,
HIGH SPEED PRECISION SPINDLES YÜKSEK DEVİRLİ HASSAS İŞ MİLLERİ www.simaksan.com.tr HAKKIMIZDA SİMAKSAN MAKİNE ELEKTRİK ELEKTRONİK SAN.TİC.LTD.ŞTİ 2006 yılında CNC takım tezgahlarına servis hizmetleri sunmak,
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri)
") KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
1 ALTERNATİF AKIMIN TANIMI
 1 ALTERNATİF AKIMIN TANIMI Alternatif Akımın Tanımı Doğru gerilim kaynağının gerilim yönü ve büyüklüğü sabit olmakta; buna bağlı olarak devredeki elektrik akımı da aynı yönlü ve sabit değerde olmaktadır.
1 ALTERNATİF AKIMIN TANIMI Alternatif Akımın Tanımı Doğru gerilim kaynağının gerilim yönü ve büyüklüğü sabit olmakta; buna bağlı olarak devredeki elektrik akımı da aynı yönlü ve sabit değerde olmaktadır.
Kırsal Bölgeler İçin Düşük Maliyetli Sabit Mıknatıslı Senkron Alternatör Tasarımı ve Analizi
 http://www.dergipark.gov.tr/mbd MBD 2018, 7 (2): 9-15 http://www.meslekibilimler.com Mesleki Bilimler Dergisi (MBD) 12 th July 18 Received; reviewed; 15 th August accepted Kırsal Bölgeler İçin Düşük Maliyetli
http://www.dergipark.gov.tr/mbd MBD 2018, 7 (2): 9-15 http://www.meslekibilimler.com Mesleki Bilimler Dergisi (MBD) 12 th July 18 Received; reviewed; 15 th August accepted Kırsal Bölgeler İçin Düşük Maliyetli
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1
 Yazar: Yrd. Doç. Dr. Mustafa Turan S1") ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
Yükseltici DA Kıyıcılar, Gerilim beslemeli invertörler / 12. Hafta
 E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
E sınıfı DC kıyıcılar; E sınıfı DC kıyıcılar, çift yönlü (4 bölgeli) DC kıyıcılar olarak bilinmekte olup iki adet C veya iki adet D sınıfı DC kıyıcının birleşiminden oluşmuşlardır. Bu tür kıyıcılar, iki
Güç Elektroniği. Yüke verilen enerjinin kontrolü, enerjinin açılması ve kapanması ile ayarlanmasını içerir.
 Güç Elektroniği GÜÇ ELEKTRONİĞİNİN TANIMI Güç Elektroniği, temel olarak yüke verilen enerjinin kontrol edilmesi ve enerji şekillerinin birbirine dönüştürülmesini inceleyen bilim dalıdır. Güç Elektroniği,
Güç Elektroniği GÜÇ ELEKTRONİĞİNİN TANIMI Güç Elektroniği, temel olarak yüke verilen enerjinin kontrol edilmesi ve enerji şekillerinin birbirine dönüştürülmesini inceleyen bilim dalıdır. Güç Elektroniği,
HİBRİD VE ELEKTRİKLİ ARAÇLAR
 HİBRİD VE ELEKTRİKLİ ARAÇLAR VERİMLİLİK VE KIYASLAMALAR Yrd. Doç. Dr. Abdullah DEMİR «Her ter ih ir vazgeçiştir» What is an EPA rating? Conditions Drive cycle: e.g. city or highway cycle, realworld, or
HİBRİD VE ELEKTRİKLİ ARAÇLAR VERİMLİLİK VE KIYASLAMALAR Yrd. Doç. Dr. Abdullah DEMİR «Her ter ih ir vazgeçiştir» What is an EPA rating? Conditions Drive cycle: e.g. city or highway cycle, realworld, or
Elektrik Makinaları I SENKRON MAKİNALAR
 Elektrik Makinaları I SENKRON MAKİNALAR Dönen Elektrik Makinaları nın önemli bir grubunu oluştururlar. (Üretilen en büyük güç ve gövde büyüklüğüne sahip dönen makinalardır) Generatör (Alternatör) olarak
Elektrik Makinaları I SENKRON MAKİNALAR Dönen Elektrik Makinaları nın önemli bir grubunu oluştururlar. (Üretilen en büyük güç ve gövde büyüklüğüne sahip dönen makinalardır) Generatör (Alternatör) olarak
24kV,630A Outdoor Switch Disconnector with Arc Quenching Chamber (ELBI) IEC IEC IEC 60129
 IEC IEC IEC 60129") 24kV,630 Outdoor Switch Disconnector with rc Quenching Chamber (ELBI) IEC265-1 IEC 694 IEC 129 Type ELBI-HN (24kV,630,normal) Closed view Open view Type ELBI-HS (24kV,630,with fuse base) Closed view Open
24kV,630 Outdoor Switch Disconnector with rc Quenching Chamber (ELBI) IEC265-1 IEC 694 IEC 129 Type ELBI-HN (24kV,630,normal) Closed view Open view Type ELBI-HS (24kV,630,with fuse base) Closed view Open
Fırçasız Doğru Akım Motorlarında Farklı Mıknatıs Dizilimleri Different Magnet Configurations in BLDC Motors
 Fırçasız Doğru Akım Motorlarında Farklı Mıknatıs Dizilimleri Different Magnet Configurations in BLDC Motors Aptullah İŞLER 1 Nezih G. ÖZÇELİK 2 Lale T. ERGENE 1 1 İstanbul Teknik Üniversitesi Elektrik
Fırçasız Doğru Akım Motorlarında Farklı Mıknatıs Dizilimleri Different Magnet Configurations in BLDC Motors Aptullah İŞLER 1 Nezih G. ÖZÇELİK 2 Lale T. ERGENE 1 1 İstanbul Teknik Üniversitesi Elektrik
ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ
 Giresun Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü Bölüm Başkanı Bölümün tanıtılması Elektrik Elektronik Mühendisliğinin tanıtılması Mühendislik Etiği Birim Sistemleri Direnç,
Giresun Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü Bölüm Başkanı Bölümün tanıtılması Elektrik Elektronik Mühendisliğinin tanıtılması Mühendislik Etiği Birim Sistemleri Direnç,
3. Bölüm: Asenkron Motorlar. Doç. Dr. Ersan KABALCI
 3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
TRANSFORMATÖRLERDE SARIM SAYISININ BULUNMASI
 DENEY-2 TRANSFORMATÖRLERDE SARIM SAYISININ BULUNMASI 2. Teorik Bilgi 2.1 Manyetik Devreler Bir elektromanyetik devrede manyetik akı, nüveye sarılı sargıdan geçen akım tarafından üretilir. Bu olay elektrik
DENEY-2 TRANSFORMATÖRLERDE SARIM SAYISININ BULUNMASI 2. Teorik Bilgi 2.1 Manyetik Devreler Bir elektromanyetik devrede manyetik akı, nüveye sarılı sargıdan geçen akım tarafından üretilir. Bu olay elektrik
ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ
 1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
Elektrikli Araçlarda Teknoloji Kırılımları Akıllı ve Çevreci Araç Teknolojileri Geliştirme ve Kümelenme Çalıştayı
 29.09.2017 S. Barış ÖZTÜRK R. Nejat TUNCAY Ö. Cihan KIVANÇ Elektrikli Araç Çağı Geldi Mi? Performans? (Verim, Hız, Moment,..) Maliyet? ( İlk Yapım + İşletme) Menzil? Güvenilirlik?, Bakım? Çevre Dostu?
29.09.2017 S. Barış ÖZTÜRK R. Nejat TUNCAY Ö. Cihan KIVANÇ Elektrikli Araç Çağı Geldi Mi? Performans? (Verim, Hız, Moment,..) Maliyet? ( İlk Yapım + İşletme) Menzil? Güvenilirlik?, Bakım? Çevre Dostu?
Elektrikli Araç Uygulamaları için 75 kw Asenkron Motor Tasarımı Design of 75 kw Asynchronous Motor for Electric Vehicle Applications
 Elektrikli Araç Uygulamaları için 75 kw Asenkron Motor Tasarımı Design of 75 kw Asynchronous Motor for Electric Vehicle Applications Cenk Ulu 1, Güven Kömürgöz 2 1 TÜBİTAK Marmara Araştırma Merkezi Enerji
Elektrikli Araç Uygulamaları için 75 kw Asenkron Motor Tasarımı Design of 75 kw Asynchronous Motor for Electric Vehicle Applications Cenk Ulu 1, Güven Kömürgöz 2 1 TÜBİTAK Marmara Araştırma Merkezi Enerji
ASTES ASANSÖR SAN. ve TİC. A.Ş.
 ASTES ASANSÖR SAN. ve TİC. A.Ş. ASANSÖR MAKİNALARI ELEVATOR MACHINES Bilgi Deneyim Yüksek teknoloji Know how Experience High-tech 13.000 m² alana sahip yeni tesisimizde en son teknoloji ve kalitede asansör
ASTES ASANSÖR SAN. ve TİC. A.Ş. ASANSÖR MAKİNALARI ELEVATOR MACHINES Bilgi Deneyim Yüksek teknoloji Know how Experience High-tech 13.000 m² alana sahip yeni tesisimizde en son teknoloji ve kalitede asansör
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ EELP212 DERS 05
 EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
Anahtarlama Modlu DA-AA Evirici
 Anahtarlama Modlu DA-AA Evirici Giriş Anahtarlama modlu eviricilerde temel kavramlar Bir fazlı eviriciler Üç fazlı eviriciler Ölü zamanın PWM eviricinin çıkış gerilimine etkisi Diğer evirici anahtarlama
Anahtarlama Modlu DA-AA Evirici Giriş Anahtarlama modlu eviricilerde temel kavramlar Bir fazlı eviriciler Üç fazlı eviriciler Ölü zamanın PWM eviricinin çıkış gerilimine etkisi Diğer evirici anahtarlama
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 12. HAFTA 1 İçindekiler Rüzgar Enerji Sistemlerinde Kullanılan
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 12. HAFTA 1 İçindekiler Rüzgar Enerji Sistemlerinde Kullanılan
İÇİNDEKİLER. ÖNSÖZ...iii İÇİNDEKİLER...v 1. GÜÇ ELEKTRONİĞİNE GENEL BİR BAKIŞ YARI İLETKEN GÜÇ ELEMANLARI...13
 İÇİNDEKİLER ÖNSÖZ...iii İÇİNDEKİLER...v 1. GÜÇ ELEKTRONİĞİNE GENEL BİR BAKIŞ...1 1.1. Tanım ve Kapsam...1 1.2. Tarihsel Gelişim ve Bugünkü Eğilim...3 1.3. Yarı İletken Güç Elemanları...4 1.3.1. Kontrolsüz
İÇİNDEKİLER ÖNSÖZ...iii İÇİNDEKİLER...v 1. GÜÇ ELEKTRONİĞİNE GENEL BİR BAKIŞ...1 1.1. Tanım ve Kapsam...1 1.2. Tarihsel Gelişim ve Bugünkü Eğilim...3 1.3. Yarı İletken Güç Elemanları...4 1.3.1. Kontrolsüz
INCREMENTAL ROTARY ENCODERS Magnetic Measurement, 58 mm Body Diameter
 INCREMENTAL ROTARY ENCODERS Magnetic Measurement, 58 mm Body Diameter ARS S 58 Magnetic principle measurement Incremental measurement 6, 8 or 10 mm shaft diameters Resolution: 1 to 1024 pulse 300 KHz response
INCREMENTAL ROTARY ENCODERS Magnetic Measurement, 58 mm Body Diameter ARS S 58 Magnetic principle measurement Incremental measurement 6, 8 or 10 mm shaft diameters Resolution: 1 to 1024 pulse 300 KHz response
Statik güç eviricilerinin temel görevi, bir DA güç kaynağı kullanarak çıkışta AA dalga şekli üretmektir.
 4. Bölüm Eviriciler ve Eviricilerin Sınıflandırılması Doç. Dr. Ersan KABALCI AEK-207 GÜNEŞ ENERJİSİ İLE ELEKTRİK ÜRETİMİ Giriş Statik güç eviricilerinin temel görevi, bir DA güç kaynağı kullanarak çıkışta
4. Bölüm Eviriciler ve Eviricilerin Sınıflandırılması Doç. Dr. Ersan KABALCI AEK-207 GÜNEŞ ENERJİSİ İLE ELEKTRİK ÜRETİMİ Giriş Statik güç eviricilerinin temel görevi, bir DA güç kaynağı kullanarak çıkışta
HİBRİD VE ELEKTRİKLİ ARAÇLAR
 HİBRİD VE ELEKTRİKLİ ARAÇLAR ENERJİ DEPOLAMA SİSTEMLERİ ELEKTRİK MOTORLARI Yrd. Doç. Dr. Abdullah DEMİR «Her tercih bir vazgeçiştir» Batteries for more electric, cleaner vehicles Batteries are designed
HİBRİD VE ELEKTRİKLİ ARAÇLAR ENERJİ DEPOLAMA SİSTEMLERİ ELEKTRİK MOTORLARI Yrd. Doç. Dr. Abdullah DEMİR «Her tercih bir vazgeçiştir» Batteries for more electric, cleaner vehicles Batteries are designed
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü GÜÇ ELEKTRONİĞİ 9. HAFTA
 A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü GÜÇ ELEKTRONİĞİ 9. HAFTA 1 İçindekiler DC/AC İnvertör Devreleri 2 Güç elektroniğinin temel devrelerinden sonuncusu olan Đnvertörler, herhangi bir DC kaynaktan aldığı
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü GÜÇ ELEKTRONİĞİ 9. HAFTA 1 İçindekiler DC/AC İnvertör Devreleri 2 Güç elektroniğinin temel devrelerinden sonuncusu olan Đnvertörler, herhangi bir DC kaynaktan aldığı
PCC 6505 PROFILE CUTTING LINE
 PCC 6505 PROFILE CUTTING LINE 1.DESCRIPTION PCC 6505 is a servo controlled machine which is specifically designed for the serial cutting of any kind of PVC and aluminum s in the market. The machine is
PCC 6505 PROFILE CUTTING LINE 1.DESCRIPTION PCC 6505 is a servo controlled machine which is specifically designed for the serial cutting of any kind of PVC and aluminum s in the market. The machine is
ELEKTRİK MAKİNELERİ (MEP 112) (ELP211) Yazar: Yrd. Doç. Dr. Mustafa Turan S1
 (ELP211) Yazar: Yrd. Doç. Dr. Mustafa Turan S1") ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
Tek Fazlı Tam Dalga Doğrultucularda Farklı Yük Durumlarındaki Harmoniklerin İncelenmesi
 Tek Fazlı Tam Dalga Doğrultucularda Farklı Yük Durumlarındaki Harmoniklerin İncelenmesi Ezgi ÜNVERDİ(ezgi.unverdi@kocaeli.edu.tr), Ali Bekir YILDIZ(abyildiz@kocaeli.edu.tr) Elektrik Mühendisliği Bölümü
Tek Fazlı Tam Dalga Doğrultucularda Farklı Yük Durumlarındaki Harmoniklerin İncelenmesi Ezgi ÜNVERDİ(ezgi.unverdi@kocaeli.edu.tr), Ali Bekir YILDIZ(abyildiz@kocaeli.edu.tr) Elektrik Mühendisliği Bölümü
İNDEKS. Cuk Türü İzolesiz Dönüştürücü, 219 Cuk Türü İzoleli Dönüştürücü, 228. Çalışma Bölgeleri, 107, 108, 109, 162, 177, 197, 200, 203, 240, 308
 İNDEKS A AC Bileşen, 186 AC Gerilim Ayarlayıcı, 8, 131, 161 AC Kıyıcı, 8, 43, 50, 51, 54, 62, 131, 132, 133, 138, 139, 140, 141, 142, 144, 145, 146, 147, 148, 149, 150, 151, 152, 153, 154, 155, 156, 157,
İNDEKS A AC Bileşen, 186 AC Gerilim Ayarlayıcı, 8, 131, 161 AC Kıyıcı, 8, 43, 50, 51, 54, 62, 131, 132, 133, 138, 139, 140, 141, 142, 144, 145, 146, 147, 148, 149, 150, 151, 152, 153, 154, 155, 156, 157,
Alternatif Akım Devre Analizi
 Alternatif Akım Devre Analizi Öğr.Gör. Emre ÖZER Alternatif Akımın Tanımı Zamaniçerisindeyönüveşiddeti belli bir düzen içerisinde (periyodik) değişen akıma alternatif akımdenir. En bilinen alternatif akım
Alternatif Akım Devre Analizi Öğr.Gör. Emre ÖZER Alternatif Akımın Tanımı Zamaniçerisindeyönüveşiddeti belli bir düzen içerisinde (periyodik) değişen akıma alternatif akımdenir. En bilinen alternatif akım
Michael Faraday 1831 Ampere ve Bio Savart Elektrik Mekanik Enerjiler arasýndaki ilişki Elektrik Magnetik Alan arasındaki ilişki
 ELEKTRİK MAKİNALARININ DÜNÜ BUGÜNÜ GELECEKTEKİ DURUMU Mekanik Enerji Michael Faraday 1831 Ampere ve Bio Savart Elektrik Mekanik Enerjiler arasýndaki ilişki Elektrik Magnetik Alan arasındaki ilişki Elektrik
ELEKTRİK MAKİNALARININ DÜNÜ BUGÜNÜ GELECEKTEKİ DURUMU Mekanik Enerji Michael Faraday 1831 Ampere ve Bio Savart Elektrik Mekanik Enerjiler arasýndaki ilişki Elektrik Magnetik Alan arasındaki ilişki Elektrik
İTÜ DERS KATALOG FORMU (COURSE CATALOGUE FORM)
") İTÜ DERS KATALOG FORMU (COURSE CATALOGUE FORM) Dersin Adı Elektrik Makinaları Course Name Electrical Machines Ders Uygulaması, Saat/Hafta (Course Implementation, Hours/Week) Kodu Yarıyılı Kredisi AKTS
İTÜ DERS KATALOG FORMU (COURSE CATALOGUE FORM) Dersin Adı Elektrik Makinaları Course Name Electrical Machines Ders Uygulaması, Saat/Hafta (Course Implementation, Hours/Week) Kodu Yarıyılı Kredisi AKTS
İngiliz Bilim Müzesinde gösterimde olan orijinal AC Tesla İndüksiyon Motorlarından biri.
 Levent ÖZDEN ASENKRON MOTORLARA GENEL BİR BAKIŞ Alternatif akım makinelerinin isimlendirilmesi ürettikleri döner manyetik alanın (stator manyetik alanı), döner mekanik kısım (rotor) ile eş zamanlı oluşu
Levent ÖZDEN ASENKRON MOTORLARA GENEL BİR BAKIŞ Alternatif akım makinelerinin isimlendirilmesi ürettikleri döner manyetik alanın (stator manyetik alanı), döner mekanik kısım (rotor) ile eş zamanlı oluşu
SENKRON MAKİNA DENEYLERİ
 DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
Mobile Surveillance Vehicle
 Tecnical Specificca ons OIS is a mobile system which enables to observed related area. How it Works? Thanks to its highly productive solar panels, according to high ef ciency panelling can serve the purpose
Tecnical Specificca ons OIS is a mobile system which enables to observed related area. How it Works? Thanks to its highly productive solar panels, according to high ef ciency panelling can serve the purpose
Sürekli Mıknatıslı Senkron Motorun Sayısal İşaret İşlemcisi ile Histerezis Akım Denetleyicili Alan Yönlendirme Kontrolünün Gerçekleştirilmesi
 Fırat Üniv. Mühendislik Bilimleri Dergisi Fırat Univ. Journal of Engineering 27(1), 15-22, 2015 27(1), 15-22, 2015 Sürekli Mıknatıslı Senkron Motorun Sayısal İşaret İşlemcisi ile Histerezis Akım Denetleyicili
Fırat Üniv. Mühendislik Bilimleri Dergisi Fırat Univ. Journal of Engineering 27(1), 15-22, 2015 27(1), 15-22, 2015 Sürekli Mıknatıslı Senkron Motorun Sayısal İşaret İşlemcisi ile Histerezis Akım Denetleyicili
VHR ER ENERJİ GERİ KAZANIM CİHAZLARI VHR ER ENERGY RECOVERY UNITS
 ER ENERJİ GERİ KAZANIM CİHAZLARI ER ENERGY RECOVERY UNITS AKSESUARLAR ACCESSORIES Sayfa/Page 9~ VENCO ER enerji geri kazanım cihazları, rotorlu tip eşanjörü sayesinde, yüksek enerji tasarrufu sağlamak
ER ENERJİ GERİ KAZANIM CİHAZLARI ER ENERGY RECOVERY UNITS AKSESUARLAR ACCESSORIES Sayfa/Page 9~ VENCO ER enerji geri kazanım cihazları, rotorlu tip eşanjörü sayesinde, yüksek enerji tasarrufu sağlamak
Sirkülasyon Pompaları
 Sirkülasyon Pompaları Circulation Pumps Dünyayı koruyan teknolojilerle daha konforlu bir hayat için çalışıyoruz.. Dünyanın önde gelen markaları, uzmanları, bilim insanları ve profesyonel kadroları, gelişen
Sirkülasyon Pompaları Circulation Pumps Dünyayı koruyan teknolojilerle daha konforlu bir hayat için çalışıyoruz.. Dünyanın önde gelen markaları, uzmanları, bilim insanları ve profesyonel kadroları, gelişen
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Bölüm: Rüzgar Enerjisi Dönüşüm Sistemleri ve Yapıları
 2. Bölüm: Rüzgar Enerjisi Dönüşüm Sistemleri ve Yapıları Doç. Dr. Ersan KABALCI AEK-204 Rüzgar Enerjisi ile Elektrik Üretimi 2.1. Rüzgar Enerjisi Dönüşüm Sistemlerine Giriş Rüzgar enerjisinin elektriksel
2. Bölüm: Rüzgar Enerjisi Dönüşüm Sistemleri ve Yapıları Doç. Dr. Ersan KABALCI AEK-204 Rüzgar Enerjisi ile Elektrik Üretimi 2.1. Rüzgar Enerjisi Dönüşüm Sistemlerine Giriş Rüzgar enerjisinin elektriksel
DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP
 DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP Amaç: Bu deneyin amacı, öğrencilerin alternatif akım ve gerilim hakkında bilgi edinmesini sağlamaktır. Deney sonunda öğrencilerin, periyot, frekans, genlik,
DENEY 7 DALGALI GERİLİM ÖLÇÜMLERİ - OSİLOSKOP Amaç: Bu deneyin amacı, öğrencilerin alternatif akım ve gerilim hakkında bilgi edinmesini sağlamaktır. Deney sonunda öğrencilerin, periyot, frekans, genlik,
Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu
 Optimization of Air Distribution in Waste Water Treatment Plants to Save Energy Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu Jan Talkenberger, Binder Group, Ulm, Germany
Optimization of Air Distribution in Waste Water Treatment Plants to Save Energy Atıksu Arıtma Tesislerinde Hava Dağıtımının Optimize Edilmesi ve Enerji Tasarrufu Jan Talkenberger, Binder Group, Ulm, Germany
Standart Features. Standart Özellikler. Özel Ekipman. Optional Features
 Akyapak manufactures 3 rolls hydraulic plate bending machines with capacity in thickness from 2 mm to 200 mm and in width from 500 mm to 12000 mm. Akyapak, 2mm den 200mm ye kadar sac kalınlığında ve 500mm
Akyapak manufactures 3 rolls hydraulic plate bending machines with capacity in thickness from 2 mm to 200 mm and in width from 500 mm to 12000 mm. Akyapak, 2mm den 200mm ye kadar sac kalınlığında ve 500mm
PWM Doğrultucular. AA/DA güç dönüşümü - mikroelektronik devrelerin güç kaynaklarında, - elektrikli ev aletlerinde,
 PWM DOĞRULTUCULAR PWM Doğrultucular AA/DA güç dönüşümü - mikroelektronik devrelerin güç kaynaklarında, - elektrikli ev aletlerinde, - elektronik balastlarda, - akü şarj sistemlerinde, - motor sürücülerinde,
PWM DOĞRULTUCULAR PWM Doğrultucular AA/DA güç dönüşümü - mikroelektronik devrelerin güç kaynaklarında, - elektrikli ev aletlerinde, - elektronik balastlarda, - akü şarj sistemlerinde, - motor sürücülerinde,
AHK. 3 Valsli Hidrolik Silindir Makineleri 3 Rolls Hydraulic Plate Bending Machines AHK 25/65
 3 Valsli Hidrolik Silindir Makineleri 3 Rolls Hydraulic Plate Bending Machines AHK 25/65 AKYAPAK AKBEND üretimi üç valsli hidrolik silindir makineleri, 2 mm den 200 mm ye kadar sac kalınlığında ve 1000
3 Valsli Hidrolik Silindir Makineleri 3 Rolls Hydraulic Plate Bending Machines AHK 25/65 AKYAPAK AKBEND üretimi üç valsli hidrolik silindir makineleri, 2 mm den 200 mm ye kadar sac kalınlığında ve 1000
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Eleco 2014 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, Kasım 2014, Bursa
 Eleco 214 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 214, Bursa Davlumbazlarda Kullanılan Tek Fazlı Sürekli Kondansatörlü Asenkron Motor Analizi Analysis of a Permanent
Eleco 214 Elektrik Elektronik Bilgisayar ve Biyomedikal Mühendisliği Sempozyumu, 27 29 Kasım 214, Bursa Davlumbazlarda Kullanılan Tek Fazlı Sürekli Kondansatörlü Asenkron Motor Analizi Analysis of a Permanent
Üç Fazlı Sincap Kafesli bir Asenkron Motorun Matlab/Simulink Ortamında Dolaylı Vektör Kontrol Benzetimi
 Araştırma Makalesi Adıyaman Üniversitesi Mühendislik Bilimleri Dergisi (05) 6-7 Üç Fazlı Sincap Kafesli bir Asenkron Motorun Matlab/Simulink Ortamında Dolaylı Vektör Kontrol Benzetimi Ahmet NUR *, Zeki
Araştırma Makalesi Adıyaman Üniversitesi Mühendislik Bilimleri Dergisi (05) 6-7 Üç Fazlı Sincap Kafesli bir Asenkron Motorun Matlab/Simulink Ortamında Dolaylı Vektör Kontrol Benzetimi Ahmet NUR *, Zeki
CER MOTORLARININ ENERJİ VERİMLİLİĞİNDE MOTOR TORK UNUN ETKİSİ
 3. Uluslar arası Raylı Sistemler Mühendisliği Sempozyumu (ISERSE 16), 13-15 Ekim 2016, Karabük, Türkiye CER MOTORLARININ ENERJİ VERİMLİLİĞİNDE MOTOR TORK UNUN ETKİSİ Mehmet Fidan a, * and Mine Sersöz b
3. Uluslar arası Raylı Sistemler Mühendisliği Sempozyumu (ISERSE 16), 13-15 Ekim 2016, Karabük, Türkiye CER MOTORLARININ ENERJİ VERİMLİLİĞİNDE MOTOR TORK UNUN ETKİSİ Mehmet Fidan a, * and Mine Sersöz b
aluminıum Profıle Brushıng Machine APSAM V6
 aluminıum Profıle Brushıng Machine APSAM V6 Sat i naj Mak inası APSAM V6 Teknik Özellikler Fırça Hızı Makina 3 grup fırçadan oluşmaktadır.her grup alt ve üst olmak üzere iki fırçadan oluşmaktadır. senkronizasyona
aluminıum Profıle Brushıng Machine APSAM V6 Sat i naj Mak inası APSAM V6 Teknik Özellikler Fırça Hızı Makina 3 grup fırçadan oluşmaktadır.her grup alt ve üst olmak üzere iki fırçadan oluşmaktadır. senkronizasyona
Delta Pulse 3 Montaj ve Çalıstırma Kılavuzu. www.teknolojiekibi.com
 Delta Pulse 3 Montaj ve Çalıstırma Kılavuzu http:/// Bu kılavuz, montajı eksiksiz olarak yapılmış devrenin kontrolü ve çalıştırılması içindir. İçeriğinde montajı tamamlanmış devrede çalıştırma öncesinde
Delta Pulse 3 Montaj ve Çalıstırma Kılavuzu http:/// Bu kılavuz, montajı eksiksiz olarak yapılmış devrenin kontrolü ve çalıştırılması içindir. İçeriğinde montajı tamamlanmış devrede çalıştırma öncesinde
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
ELEKTRİK TAHRİKLİ TAŞITLAR İÇİN ÇEKİŞ KONTROL SİSTEMİ SİMÜLASYONU
 ELEKTRİK TAHRİKLİ TAŞITLAR İÇİN ÇEKİŞ KONTROL SİSTEMİ SİMÜLASYONU Mehmet Aytaç ÇINAR 1 Çiğdem GÜNDOĞAN 2 Feriha ERFAN KUYUMCU 3 1,2,3 Elektrik Mühendisliği Bölümü, Mühendislik Fakültesi Kocaeli Üniversitesi,
ELEKTRİK TAHRİKLİ TAŞITLAR İÇİN ÇEKİŞ KONTROL SİSTEMİ SİMÜLASYONU Mehmet Aytaç ÇINAR 1 Çiğdem GÜNDOĞAN 2 Feriha ERFAN KUYUMCU 3 1,2,3 Elektrik Mühendisliği Bölümü, Mühendislik Fakültesi Kocaeli Üniversitesi,
Hafta #3 Pasif ve Aktif Elemanların Seçimi «Kondansatörler» ELMU4087 ENDÜSTRİYEL ELEKTRONİK
 ENDÜSTRİYEL ELEKTRONİK Hafta #3 Pasif ve Aktif Elemanların Seçimi «Kondansatörler» 1 KONDANSATÖR 2 KONDANSATÖR { İtalyanca: Condensatore } { İngilizce: Capacitor } d area +Q A Electric field strength E
ENDÜSTRİYEL ELEKTRONİK Hafta #3 Pasif ve Aktif Elemanların Seçimi «Kondansatörler» 1 KONDANSATÖR 2 KONDANSATÖR { İtalyanca: Condensatore } { İngilizce: Capacitor } d area +Q A Electric field strength E
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 10. HAFTA 1 İçindekiler Doğru Akım Generatörleri 2 Doğru akım makinelerinin
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 10. HAFTA 1 İçindekiler Doğru Akım Generatörleri 2 Doğru akım makinelerinin
Seviye Kontrol Flatörleri Level Control Float Switches
 Seviye Kontrol Flatörleri Seviye Kontrol Flatörleri Serisi Seviye Kontrol Flatörleri Genel Özellikler ve Teknik Bilgiler 03 Boyutlar 05 Series Level Control Float Switches General Specifications and Technical
Seviye Kontrol Flatörleri Seviye Kontrol Flatörleri Serisi Seviye Kontrol Flatörleri Genel Özellikler ve Teknik Bilgiler 03 Boyutlar 05 Series Level Control Float Switches General Specifications and Technical
PERFORMANCE EVALUATION OF AN INDUCTION MOTOR BY USING FINITE ELEMENT METHOD
 PERFORMANCE EVALUATION OF AN INDUCTION MOTOR BY USING FINITE ELEMENT METHOD A. İhsan ÇANAKOĞLU *, A. Gökhan YETGİN**, Mustafa TURAN** *Dumlupınar Üniversitesi, Mühendislik Fakültesi, Elektrik Elektronik
PERFORMANCE EVALUATION OF AN INDUCTION MOTOR BY USING FINITE ELEMENT METHOD A. İhsan ÇANAKOĞLU *, A. Gökhan YETGİN**, Mustafa TURAN** *Dumlupınar Üniversitesi, Mühendislik Fakültesi, Elektrik Elektronik
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
 BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü. Doğru Akım Makinaları - I
 KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü 1. Deneyin Adı Doğru Akım Makinaları 2. Deneyi Amacı Doğru akım motorunun yük eğrilerinin elde edilmesi 3. Deneye
KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü 1. Deneyin Adı Doğru Akım Makinaları 2. Deneyi Amacı Doğru akım motorunun yük eğrilerinin elde edilmesi 3. Deneye
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY
 EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
EGE UNIVERSITY ELECTRICAL AND ELECTRONICS ENGINEERING COMMUNICATION SYSTEM LABORATORY INTRODUCTION TO COMMUNICATION SYSTEM EXPERIMENT 4: AMPLITUDE MODULATION Objectives Definition and modulating of Amplitude
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
88 x x x x x /56 55/74 31/42 36/49 55/74
 Model KDI 903 TCR KDI 2504 TCR KDI 903 M KDI 2504 M KDI 2504 TM Silindir (no) 3 4 3 4 4 Çap x (mm) x e 88 x 02 88 x 02 88 x 02 88 x 02 88 x 02 (cm 3 ).86 2.482.86 2.482.86 Devir R.P.M. ) 2.600 2.600 2.800
Model KDI 903 TCR KDI 2504 TCR KDI 903 M KDI 2504 M KDI 2504 TM Silindir (no) 3 4 3 4 4 Çap x (mm) x e 88 x 02 88 x 02 88 x 02 88 x 02 88 x 02 (cm 3 ).86 2.482.86 2.482.86 Devir R.P.M. ) 2.600 2.600 2.800
6. ÜNİTE DOĞRU AKIM MAKİNALARININ DEVREYE BAĞLANTI ŞEMALARI
 6. ÜNİTE DOĞRU AKIM MAKİNALARININ DEVREYE BAĞLANTI ŞEMALARI KONULAR 1. Doğru Akım Jeneratörleri (Dinamolar) 2. Doğru Akım Jeneratörlerinin Paralel Bağlanması 3. Doğru Akım Motorları GİRİŞ Bir iletkende
6. ÜNİTE DOĞRU AKIM MAKİNALARININ DEVREYE BAĞLANTI ŞEMALARI KONULAR 1. Doğru Akım Jeneratörleri (Dinamolar) 2. Doğru Akım Jeneratörlerinin Paralel Bağlanması 3. Doğru Akım Motorları GİRİŞ Bir iletkende
63A - 125A CEE NORM FİŞ & PRİZLER 63A - 125A CEE NORM PLUGS & SOCKETS. connectors
 63A - 125A CEE NORM FİŞ & PRİZLER 63A - 125A CEE NORM PLUGS & SOCKETS connectors 38 63A - 125A CEE NORM FİŞ & PRİZLER 63A - 125A CEE NORM PLUGS & SOCKETS connectors Mermer ocakları ve maden ocakları, limanlar
63A - 125A CEE NORM FİŞ & PRİZLER 63A - 125A CEE NORM PLUGS & SOCKETS connectors 38 63A - 125A CEE NORM FİŞ & PRİZLER 63A - 125A CEE NORM PLUGS & SOCKETS connectors Mermer ocakları ve maden ocakları, limanlar
Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir.
 ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
HİBRİD VE ELEKTRİKLİ ARAÇLAR
 HİBRİD VE ELEKTRİKLİ ARAÇLAR Yrd. Doç. Dr. Abdullah DEMİR «Her ter ih ir vazgeçiştir» YAKIT/ENERJİ VE TAHRİK İ TEMLERİ Enerji Kay akları E erji Taşıyıcıları Tahrik Sistemleri Petrol (petrol, gaz) ıvı Yakıtlar
HİBRİD VE ELEKTRİKLİ ARAÇLAR Yrd. Doç. Dr. Abdullah DEMİR «Her ter ih ir vazgeçiştir» YAKIT/ENERJİ VE TAHRİK İ TEMLERİ Enerji Kay akları E erji Taşıyıcıları Tahrik Sistemleri Petrol (petrol, gaz) ıvı Yakıtlar
Çevirenlerin Ön Sözü. Yazar Hakkında
 İçindekiler Çevirenlerin Ön Sözü Ön Söz Yazar Hakkında Bölüm 1 Giriş 1 1.1 Güç Elektroniğinin Uygulamaları 2 1.2 Güç Elektroniğinin Tarihçesi 4 1.3 Güç Elektroniği Devre Çeşitleri 6 1.4 Güç Elektroniği
İçindekiler Çevirenlerin Ön Sözü Ön Söz Yazar Hakkında Bölüm 1 Giriş 1 1.1 Güç Elektroniğinin Uygulamaları 2 1.2 Güç Elektroniğinin Tarihçesi 4 1.3 Güç Elektroniği Devre Çeşitleri 6 1.4 Güç Elektroniği
ELECO '2012 Elektrik - Elektronik ve Bilgisayar Mühendisliği Sempozyumu, 29 Kasım - 01 Aralık 2012, Bursa
 ELECO '2 Elektrik - Elektronik ve Bilgisayar Mühendisliği Sempozyumu, 29 Kasım - 1 Aralık 2, Bursa Sürekli Mıknatıslı AC Servomotor Tasarımında Radyel ve Paralel Mıknatıslamanın Motor Performansına Etkisi
ELECO '2 Elektrik - Elektronik ve Bilgisayar Mühendisliği Sempozyumu, 29 Kasım - 1 Aralık 2, Bursa Sürekli Mıknatıslı AC Servomotor Tasarımında Radyel ve Paralel Mıknatıslamanın Motor Performansına Etkisi
aircoolers Evaporatörler Aircoolers TAVAN TİPİ EVAPORATÖRLER CEILING TYPE AIR COOLERS DUVAR TİPİ EVAPORATÖRLER WALL TYPE AIR COOLERS
 aircoolers Evaporatörler Aircoolers CEILING TYPE AIR COOLERS Teknik Bilgiler / Technical Details UYGULAMA Ürünlerimiz, endüstriyel ve ticari soğuk muhafaza, donmuş muhafaza, şoklama hücreleri ve serinletilme
aircoolers Evaporatörler Aircoolers CEILING TYPE AIR COOLERS Teknik Bilgiler / Technical Details UYGULAMA Ürünlerimiz, endüstriyel ve ticari soğuk muhafaza, donmuş muhafaza, şoklama hücreleri ve serinletilme
Hakkımızda / About Us... Tunç Makina 1980'den günümüze imal ettiği Eksantrik Presler de kullanmış olduğu,kaliteli malzemelerle imalatını uygulayarak,k
 Hakkımızda / About Us... Tunç Makina 1980'den günümüze imal ettiği Eksantrik Presler de kullanmış olduğu,kaliteli malzemelerle imalatını uygulayarak,kendi alanında daima en iyiyi amaç edinmiştir. Kaliteli
Hakkımızda / About Us... Tunç Makina 1980'den günümüze imal ettiği Eksantrik Presler de kullanmış olduğu,kaliteli malzemelerle imalatını uygulayarak,kendi alanında daima en iyiyi amaç edinmiştir. Kaliteli
* _0817* Sürücü tekniği \ Tahrik otomasyonu \ Sistem entegrasyonu \ Servisler. Düzeltme. DT/DV AC Motorlu MOVIMOT MM..D
 Sürücü tekniği \ Tahrik otomasyonu \ Sistem entegrasyonu \ Servisler *23582626_0817* Düzeltme DT/DV AC Motorlu MOVIMOT MM..D Baskı 08/2017 23582626/TR SEW-EURODRIVE Driving the world İlaveler/Düzeltmeler
Sürücü tekniği \ Tahrik otomasyonu \ Sistem entegrasyonu \ Servisler *23582626_0817* Düzeltme DT/DV AC Motorlu MOVIMOT MM..D Baskı 08/2017 23582626/TR SEW-EURODRIVE Driving the world İlaveler/Düzeltmeler
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
ASENKRON (İNDÜKSİYON)
") ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
RÜZGAR ENERJİSİ. Anahtar sözcükler: Rüzgar Enerjisi, Rüzgar Türbini, Elektriksel Dönüşüm Sistemleri, Jeneratör.
 RÜZGAR ENERJİSİ Küçük güçlü sistemlerde eskiden çok kullanılan doğru akım (DA) jeneratörü, günümüzde yerini genellikle senkron veya asenkron jeneratörlere bırakmıştır. Bu jeneratörler, konverterler yardımıyla
RÜZGAR ENERJİSİ Küçük güçlü sistemlerde eskiden çok kullanılan doğru akım (DA) jeneratörü, günümüzde yerini genellikle senkron veya asenkron jeneratörlere bırakmıştır. Bu jeneratörler, konverterler yardımıyla
First Stage of an Automated Content-Based Citation Analysis Study: Detection of Citation Sentences
 First Stage of an Automated Content-Based Citation Analysis Study: Detection of Citation Sentences Zehra Taşkın, Umut Al & Umut Sezen {ztaskin, umutal, u.sezen}@hacettepe.edu.tr - 1 Plan Need for content-based
First Stage of an Automated Content-Based Citation Analysis Study: Detection of Citation Sentences Zehra Taşkın, Umut Al & Umut Sezen {ztaskin, umutal, u.sezen}@hacettepe.edu.tr - 1 Plan Need for content-based
22. ÜNİTE SENKRON MOTORLAR
 22. ÜNİTE SENKRON MOTORLAR KONULAR 1. YAPISI VE ÇALIŞMA PRENSİBİ 2. YOL VERME YÖNTEMLERİ 3. KULLANILDIĞI YERLER Herhangi bir yükü beslemekte olan ve birbirine paralel bağlanan iki altematörden birsinin
22. ÜNİTE SENKRON MOTORLAR KONULAR 1. YAPISI VE ÇALIŞMA PRENSİBİ 2. YOL VERME YÖNTEMLERİ 3. KULLANILDIĞI YERLER Herhangi bir yükü beslemekte olan ve birbirine paralel bağlanan iki altematörden birsinin
Hibrid Araç Bileşenlerinin Gelişimi Evolution of Hybrid Vehicle Components
 Hibrid Araç Bileşenlerinin Gelişimi Evolution of Hybrid Vehicle Components İlker Özelgin, Dr. Murat Yıldırım Ar-Ge Koordinatörlüğü Ford Otosan ozelgin@yahoo.com, iozelgin@ford.com.tr, myildiri@ford.com.tr
Hibrid Araç Bileşenlerinin Gelişimi Evolution of Hybrid Vehicle Components İlker Özelgin, Dr. Murat Yıldırım Ar-Ge Koordinatörlüğü Ford Otosan ozelgin@yahoo.com, iozelgin@ford.com.tr, myildiri@ford.com.tr