ROBOTİK VE ENDÜSTRİYEL ROBOTLAR
|
|
|
- Ceren Şafak
- 7 yıl önce
- İzleme sayısı:
Transkript


1 HALİÇ ÜNİVERSİTESİ İŞLETME FAKÜLTESİ İŞLETME ENFORMATİĞİ BÖLÜMÜ ROBOTİK VE ENDÜSTRİYEL ROBOTLAR Yrd. Doç. Dr. Turan ŞİŞMAN İSTANBUL

2 AJANDA Robotik Etimoloji Kilometre Taşları Tanımlar ve Yasalar Robot Teorisi Robot Kinematiği Robot Dinamiği Robot Kontrolü Endüstriyel Robotlar Satış Miktarları Robot Piyasası Gelecek 2


3 ROBOTİK Etimoloji Çek, Slovak ve Polonya dilleri; roboti ; köle işçi, angarya iş, Eski Slav kilisesi; Rabota ; servis yapan, Indo-Avrupa dilleri kökü; Orbh, Almanca uzantısı; Arbeiter ; işçi. 3

4 ROBOTİK Etimoloji Karel Čapek (1920) Rossum's Universal Robots - Rossumovi Univerzální Roboti isimli tiyatro oyunu, Tamamen mekanik bir sistem yerine insansı yapıda biyoteknolojik bir ürün 4
 robot teknolojisi öneri ve")
5 ROBOTİK Kilometre Taşları İlk kavramlar MÖ 3000 yılları, Eski Mısır, eski Yunan ve Anadolu medeniyetlerinde otomatik su saatleri benzeri makinelerin geliştirilmesi, Leonardo da Vinci nin yürüyen mekanik aslanı, Cizreli Eb-Ül-İz Cezeri, (MS 12 yy) robot teknolojisi öneri ve uygulamaları 5

6 ROBOTİK Kilometre Taşları 6



7 ROBOTİK Kilometre Taşları 7

8 ROBOTİK Tanımlar Amerika Robot Enstitüsü (1979): Çeşitli işleri yapabilmek için programlanmış hareketlerle malzeme, parça, alet veya özel cihazları taşımak için tasarlanmış çok işlevli, tekrar programlanabilir düzenek. Genel olarak; Canlılara benzer işlevleri olan ve davranış biçimleri sergileyen makinelerdir. Temel özellikleri; işlevsel olarak kendi kendilerine yeter (otonom) ve programlanabilir veya öğrenebilir olmaları sayılabilir. 8


9 ROBOTİK Robotların Üç Yasası (Isaac Asimow) Bir robot bir insana zarar veremez veya kayıtsız kalarak bir insanın zarar görmesine neden olamaz. Birinci yasa ile çatışmamak şartı ile bir robot insanlar tarafından verilen emirlere uymak zorundadır. Birinci ve İkinci yasa ile çatışmamak şartı ile bir robot kendi varlığını korumalıdır. 9




10 ROBOT TEORİSİ Robotların Temel İşlevleri Çevrelerini algılarlar, Algılanan çevre ile ilgili karar alabilirler, Çevrelerini değiştirebilirler. Algılayıcılar Kontrolör 10 Eyleyiciler


11 ROBOT TEORİSİ Robot Bileşenleri Temel (Base) Manipülatör Kontrolör Robot Eli Güç Kaynağı 11


12 ROBOT TEORİSİ Robot Bilimi 12


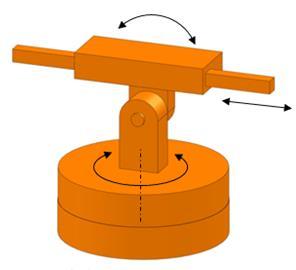


13 ROBOT TEORİSİ Robot Tipleri Kartezyen Silindirik Küresel 13 Eklemli SCARA


14 ROBOT TEORİSİ Robot Tipleri Kartezyen Koordinat Robotlar Silindirik Koordinat Robotlar 14


15 ROBOT TEORİSİ Robot Tipleri Küresel Koordinat Robotlar SCARA Robotlar 15


16 ROBOT TEORİSİ Robot Mekaniği 16

17 ROBOT TEORİSİ Robot Mekaniği Robot Kinematiği Y 3 3 Y 4 Y X 2 X 3 X 4 Y X 0 17
18 ROBOT TEORİSİ Robot Mekaniği Robot Dinamiği 18
19 19 ROBOT TEKNOLOJİLERİ

20 20 ENDÜSTRİYEL ROBOTLAR
21 ENDÜSTRİYEL ROBOTLAR Robotlar Niçin Kullanılır? Üretim maliyetinin düşürülmesi Robotun bir saatlik maliyeti $ 5 iken çalışanın $ 20 (Yan ödemeler, sosyal sigorta, tatili, izin vb.), Yemek ve kahve molası ve kişisel ihtiyaçlar, Dikkatsizlik, yorgunluk vb. sebepler Bir robotun yatırım maliyeti ortalama 1-2 yıl içerisinde geri döndürülür. 21

22 ENDÜSTRİYEL ROBOTLAR Robotlar Niçin Kullanılır? Üretim artışının sağlanması Robotlar daha hızlı çalışırlar. Bir araba boyaması robot tarafından 90 saniyede yapılırken insan 15 dakikada tamamlar. 22

23 ENDÜSTRİYEL ROBOTLAR Robotlar Niçin Kullanılır? Kalitenin artırılması Robotlarda pozisyon doğruluğu ve tekrarlanabilirliği insana göre daha yüksektir. Çalışma hızı, yüksek kalite üretim için avantajdır. 23

24 ENDÜSTRİYEL ROBOTLAR Robotlar Niçin Kullanılır? Tehlikeli ortamlarda çalışma İş sağlığı ve güvenliği yönüyle, Dökümhanelerde, kaynak yapılan yerlerde, analiz laboratuarlarında, Su altı, uzay ve tehlikeli bölgelerde 24

25 ENDÜSTRİYEL ROBOTLAR Uygulama Alanları 25




26 ENDÜSTRİYEL ROBOTLAR Endüstriyel Robotlar Kaynak Robotları Montaj Robotları 26 Boyama Robotları Transfer Robotları
27 ENDÜSTRİYEL ROBOTLAR Endüstriyel Robotlar 27
28 ENDÜSTRİYEL ROBOTLAR Endüstriyel Robotlar 28




29 ENDÜSTRİYEL ROBOTLAR Alan ve Keşif Robotları Cerrahi Robotlar Keşif Robotları 29 Su Altı Robotları Güvenlik Robotları




30 ENDÜSTRİYEL ROBOTLAR Alan ve Savunma Robotları 30
31 ENDÜSTRİYEL ROBOTLAR Alan ve Savunma Robotları 31







32 ENDÜSTRİYEL ROBOTLAR Hizmet ve Eğlence Robotları 32
33 ENDÜSTRİYEL ROBOTLAR Hizmet ve Eğlence Robotları 33



34 ENDÜSTRİYEL ROBOTLAR Hizmet ve Yardım Robotları 34
35 ENDÜSTRİYEL ROBOTLAR Hizmet ve Yardım Robotları 35

36 ROBOT PİYASASI Robot İşçi Sayısı Artıyor! Şimdilerde 1,5 milyon robot iş başında, 2020 li yıllarda 2,6 milyon olacak! 36

37 ROBOT PİYASASI Robot İşçi Sayısı Artıyor! Şimdilerde 1,5 milyon robot iş başında, 2020 li yıllarda 2,6 milyon olacak! 37

38 ROBOT PİYASASI Robot İşçi Sayısı Artıyor! 38

39 ROBOT PİYASASI Servis Robotları da Artıyor! 39
40 ROBOT ve ROBOT TEKNOLOJİLERİ İnsan Robot Karşı Karşıya! 40

41 ROBOT ve ROBOT TEKNOLOJİLERİ Kafayı Yiyen Robotlar! 41
42 ROBOT ve ROBOT TEKNOLOJİLERİ Kafayı Yiyen Robotlar! 42
R O B O T T E K N O L O J İ L E R İ U Y G U L A M A v e A R A Ş T I R M A M E R K E Z İ
 atılım üniversitesi R O B O T T E K N O L O J İ L E R İ U Y G U L A M A v e A R A Ş T I R M A M E R K E Z İ Abdülkadir Erden (30 Nisan 2010) Gündem Robotlar, Etimoloji, Kilometre taşları, Tanımlar ve yasalar,
atılım üniversitesi R O B O T T E K N O L O J İ L E R İ U Y G U L A M A v e A R A Ş T I R M A M E R K E Z İ Abdülkadir Erden (30 Nisan 2010) Gündem Robotlar, Etimoloji, Kilometre taşları, Tanımlar ve yasalar,
ROBOTİK VE YAPAY ZEKA
 ROBOTİK VE YAPAY ZEKA Robot Nedir? Robotik Nedir? Robotun Tarihçesi Nerelerde Kullanılır? Yapay Zeka Nedir? Robot Yarışmaları Robot Malzemeleri Robot Nedir? Robot; Elektronik, yazılım ve mekanik sistemlerin
ROBOTİK VE YAPAY ZEKA Robot Nedir? Robotik Nedir? Robotun Tarihçesi Nerelerde Kullanılır? Yapay Zeka Nedir? Robot Yarışmaları Robot Malzemeleri Robot Nedir? Robot; Elektronik, yazılım ve mekanik sistemlerin
Robot Bilimi. Giriş ve Genel Tanımlar
 Robot Bilimi Giriş ve Genel Tanımlar Öğr. Gör. M. Ozan AKI r1.0 Robot Kelime Anlamı Türk Dil Kurumu Türkçe Sözlüğü (2014); 1. Belirli bir işi yerine getirmek için manyetizma ile kendisine çeşitli işler
Robot Bilimi Giriş ve Genel Tanımlar Öğr. Gör. M. Ozan AKI r1.0 Robot Kelime Anlamı Türk Dil Kurumu Türkçe Sözlüğü (2014); 1. Belirli bir işi yerine getirmek için manyetizma ile kendisine çeşitli işler
Sakarya Üniversitesi - Bilgisayar Mühendisliği
 Dr. Seçkin Arı Giriş Seçkin Arı M5 415 ari@sakarya.edu.tr Kitap J.J. Craig, Introduction to Robotics, Prentice Hall, 2005 B. Siciliano,, RoboticsModelling, Planning, andcontrol, Springer, 2009 Not %12
Dr. Seçkin Arı Giriş Seçkin Arı M5 415 ari@sakarya.edu.tr Kitap J.J. Craig, Introduction to Robotics, Prentice Hall, 2005 B. Siciliano,, RoboticsModelling, Planning, andcontrol, Springer, 2009 Not %12
ROBOT, ROBOT TEKNOLOJİLERİ VE ROTAM. Prof. Dr. Abdülkadir Erden in tarihinde gerçekleştirdiği konferans metnidir.
 ROBOT, ROBOT TEKNOLOJİLERİ VE ROTAM Prof. Dr. Abdülkadir Erden in 30.04.2010 tarihinde gerçekleştirdiği konferans metnidir. Abdülkadir Erden: Bugünkü buluşmayı RoTAM ın ilk semineri olarak kabul edebiliriz
ROBOT, ROBOT TEKNOLOJİLERİ VE ROTAM Prof. Dr. Abdülkadir Erden in 30.04.2010 tarihinde gerçekleştirdiği konferans metnidir. Abdülkadir Erden: Bugünkü buluşmayı RoTAM ın ilk semineri olarak kabul edebiliriz
1. Bölüm Endüstriyel Robotlara Genel Bakış
 1. Bölüm Endüstriyel Robotlara Genel Bakış 1. Bölüm: Endüstriyel Robotlara Genel Bakış 1.1. Endüstriyel Robot Robotik genel anlamda makina, elektrik-elektronik ve bilgisayar gibi alanların birleşiminden
1. Bölüm Endüstriyel Robotlara Genel Bakış 1. Bölüm: Endüstriyel Robotlara Genel Bakış 1.1. Endüstriyel Robot Robotik genel anlamda makina, elektrik-elektronik ve bilgisayar gibi alanların birleşiminden
Robot Bilimi. Robotların Sınıflandırılması
 Robot Bilimi Robotların Sınıflandırılması Öğr. Gör. M. Ozan AKI r1.0 Robot Teknolojisinin Temelleri Robot bilimi, birçok mühendislik dalını kapsar. Teknoloji Düzeyi Hareket Güç Açık Çevrim Denetim Dış
Robot Bilimi Robotların Sınıflandırılması Öğr. Gör. M. Ozan AKI r1.0 Robot Teknolojisinin Temelleri Robot bilimi, birçok mühendislik dalını kapsar. Teknoloji Düzeyi Hareket Güç Açık Çevrim Denetim Dış
Robotik Sistemlerine Giriş. Yard. Doç. Dr. Hasan TİRYAKİ
 Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
Robotik Sistemlerine Giriş Yard. Doç. Dr. Hasan TİRYAKİ Ders Planı Robot nedir? Robot, yeniden programlanabilen, maddeleri, parçaları, aletleri programlanmış hareketler ile işe göre taşıyan veya işleyen
Ö Z E L E G E L İ S E S İ
 Projeyi Hazırlayanlar Cem GÖKALP 595 8-C Görkem ARGALIOĞLU 11 8-C Uğur KARCI 544 8-C Serhan ÖZKEBAPÇI 791 8-C Tunç TORT 18 8-C Danışman Öğretmen Nilüfer EFTELİOĞLU İZMİR 2004 1 İÇİNDEKİLER Teşekkür...
Projeyi Hazırlayanlar Cem GÖKALP 595 8-C Görkem ARGALIOĞLU 11 8-C Uğur KARCI 544 8-C Serhan ÖZKEBAPÇI 791 8-C Tunç TORT 18 8-C Danışman Öğretmen Nilüfer EFTELİOĞLU İZMİR 2004 1 İÇİNDEKİLER Teşekkür...
Yararlanılan Kaynaklar
 Mekatroniğe Giriş Yararlanılan Kaynaklar 1- Introduction to Mechatronics and Measurment Systems.Third Edition, David G. Alciatore, Michael B. Histand, McGraw-Hill Intentaional Edition, 2007. II-Temel Elektronik,
Mekatroniğe Giriş Yararlanılan Kaynaklar 1- Introduction to Mechatronics and Measurment Systems.Third Edition, David G. Alciatore, Michael B. Histand, McGraw-Hill Intentaional Edition, 2007. II-Temel Elektronik,
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş
 Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
SİSTEM DİNAMİĞİ VE KONTROL
 ABANT İZZET BAYSAL ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ SİSTEM DİNAMİĞİ VE KONTROL (1. Bölüm) Yrd. Doç. Dr. Turan ŞİŞMAN 2012 - BOLU 1 Otomatik Kontrol Kuramı Belirli
ABANT İZZET BAYSAL ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ SİSTEM DİNAMİĞİ VE KONTROL (1. Bölüm) Yrd. Doç. Dr. Turan ŞİŞMAN 2012 - BOLU 1 Otomatik Kontrol Kuramı Belirli
T.C. BEYKENT ÜNİVERSİTESİ. Kontrol Sistemleri
 T.C. BEYKENT ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ Kontrol Sistemleri Ödev-1 Ödevin Konusu Otomatik Kontrol Sistemlerinin Tarihi Gelişimi Dersi Veren
T.C. BEYKENT ÜNİVERSİTESİ MÜHENDİSLİK MİMARLIK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ Kontrol Sistemleri Ödev-1 Ödevin Konusu Otomatik Kontrol Sistemlerinin Tarihi Gelişimi Dersi Veren
UR3 Sayesinde 2 Kişilik İş, Tek Kişiyle Kolayca Tamamlanabilecek
 Yardımcı robotların Danimarkalı öncüsü Universal Robots, hafif montaj işleri ve otomatikleştirilmiş tezgah üstü görevler için ürettiği yeni ve küçük robotu UR3 ün tanıtımı 13 Nisan da Hannover Messe de
Yardımcı robotların Danimarkalı öncüsü Universal Robots, hafif montaj işleri ve otomatikleştirilmiş tezgah üstü görevler için ürettiği yeni ve küçük robotu UR3 ün tanıtımı 13 Nisan da Hannover Messe de
Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 2014 Müfredatı
 Diploma Programı 2014 Müfredatı") Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 01 Müfredatı 1 0 TDB101 Türk Dili 1 11 MAK109 Fizik 1 1 180 MAK10 Makina Mühendisliğine Giriş 88 MAK101
Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 01 Müfredatı 1 0 TDB101 Türk Dili 1 11 MAK109 Fizik 1 1 180 MAK10 Makina Mühendisliğine Giriş 88 MAK101
CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI
 CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI Kuruluş Amacı Celal Bayar Üniversitesi Elektrik-Elektronik Mühendisliği Kontrol
CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI Kuruluş Amacı Celal Bayar Üniversitesi Elektrik-Elektronik Mühendisliği Kontrol
Endüstriyel Robotlar. Endüstriyel Robotun Tanımı
 Endüstriyel Robotlar İçindekiler: 1. Robot Anatomisi ve İlgili Konular 2. Robot Kontrol Sistemleri 3. Uç Eyleyiciler 4. Robotikteki Sensörler 5. Endüstriyel Robot Uygulamaları 6. Robot Programlama 7. Robotun
Endüstriyel Robotlar İçindekiler: 1. Robot Anatomisi ve İlgili Konular 2. Robot Kontrol Sistemleri 3. Uç Eyleyiciler 4. Robotikteki Sensörler 5. Endüstriyel Robot Uygulamaları 6. Robot Programlama 7. Robotun
Akdeniz Üniversitesi Makine Mühendisliği Bölümü
 Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 01 Müfredatı 1 0 TDB101 Türk Dili 1 989 MAT1 Matematik I 1 17 MAK10 Temel Bilgisayar ve Algoritma 1
Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 01 Müfredatı 1 0 TDB101 Türk Dili 1 989 MAT1 Matematik I 1 17 MAK10 Temel Bilgisayar ve Algoritma 1
MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ)
") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ ALANI ANKARA 2007 AMAÇ ÖĞRENME FAALİYETİ -13 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ ALANI ANKARA 2007 AMAÇ ÖĞRENME FAALİYETİ -13 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MESLEK YÜKSEKOKULU 2013-2014 EĞİTİM-ÖĞRETİM YILI BAHAR YARIYILI BÜTÜNLEME SINAV PROGRAMI
 11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 09.06.14 Pazartesi 12.00 901 1 Beden Eğitimi ve Spor 10.06.14 Salı 10.30 310 1 Temel Bilgi Teknolojisi Kullanımı 10.06.14 Salı 12.00 D1-D2 1 Matematik
11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 09.06.14 Pazartesi 12.00 901 1 Beden Eğitimi ve Spor 10.06.14 Salı 10.30 310 1 Temel Bilgi Teknolojisi Kullanımı 10.06.14 Salı 12.00 D1-D2 1 Matematik
ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ
 ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ 1 Önder DEMİR 2 Cengiz ŞAFAK 3 Volkan TUNALI 4 Elif Pınar HACIBEYOĞLU 1,2,3 Marmara Üniversitesi Teknik Eğitim Fakültesi, Elektronik Bilgisayar Eğitimi Bölümü, Göztepe
ROBOTİK EĞİTİMİ İÇİN GÖRSEL BİR ARA YÜZ 1 Önder DEMİR 2 Cengiz ŞAFAK 3 Volkan TUNALI 4 Elif Pınar HACIBEYOĞLU 1,2,3 Marmara Üniversitesi Teknik Eğitim Fakültesi, Elektronik Bilgisayar Eğitimi Bölümü, Göztepe
KIRKLARELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİMSEL HAZIRLIK PROGRAMLARI YILLIK EĞİTİM PLANI
 KIRKLARELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİMSEL HAZIRLIK PROGRAMLARI LIK EĞİTİM PLANI (2015-2016 eğitim-öğretim yılından itibaren geçerlidir.) I. ve II. YARI ADI Z/S T U L KREDİ AKTS TEK15001 MATEMATİK
KIRKLARELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİMSEL HAZIRLIK PROGRAMLARI LIK EĞİTİM PLANI (2015-2016 eğitim-öğretim yılından itibaren geçerlidir.) I. ve II. YARI ADI Z/S T U L KREDİ AKTS TEK15001 MATEMATİK
IENG 227 Modern Üretim Yaklaşımları
 IENG 227 Modern Üretim Yaklaşımları Pamukkale Üniversitesi Endüstri Mühendisliği Bölümü IENG 227 Modern Üretim Yaklaşımları Dr. Hacer Güner Gören Esnek Üretim Sistemleri Esnek Üretim Sistemleri Bir esnek
IENG 227 Modern Üretim Yaklaşımları Pamukkale Üniversitesi Endüstri Mühendisliği Bölümü IENG 227 Modern Üretim Yaklaşımları Dr. Hacer Güner Gören Esnek Üretim Sistemleri Esnek Üretim Sistemleri Bir esnek
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ENDÜSTRİYEL ROBOT KOL KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ
 TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ENDÜSTRİYEL ROBOT KOL KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Endüstri 4.0 Tematik
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ENDÜSTRİYEL ROBOT KOL KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Endüstri 4.0 Tematik
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MESLEK YÜKSEKOKULU 2013-2014 EĞİTİM-ÖĞRETİM YILI BAHAR YARIYILI YARIYIL SONU SINAV PROGRAMI
 11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 22.05.14 Perşembe 10.30 D3-D4 1 Matematik II 23.05.14 Cuma 13.30 901 1 Beden Eğitimi ve Spor 23.05.14 Cuma 15.30 110-112 1 Beton Teknolojisi 27.05.14
11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 22.05.14 Perşembe 10.30 D3-D4 1 Matematik II 23.05.14 Cuma 13.30 901 1 Beden Eğitimi ve Spor 23.05.14 Cuma 15.30 110-112 1 Beton Teknolojisi 27.05.14
Eğitim veya Danışmanlık Hizmetinin Tanımı
 Eğitim veya Danışmanlık Hizmetinin Tanımı Programın Adı Proje Kodu Başvuru Sahibi Başvuru Dönemi TR42//TD Teknik Destek Programı TR42//TD/0123 Birlik Vakfı Sakarya Şubesi Eylül-Ekim Dönemi 1. Proje kapsamında
Eğitim veya Danışmanlık Hizmetinin Tanımı Programın Adı Proje Kodu Başvuru Sahibi Başvuru Dönemi TR42//TD Teknik Destek Programı TR42//TD/0123 Birlik Vakfı Sakarya Şubesi Eylül-Ekim Dönemi 1. Proje kapsamında
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MESLEK YÜKSEKOKULU 2013-2014 EĞİTİM-ÖĞRETİM YILI BAHAR YARIYILI YARIYIL İÇİ SINAV PROGRAMI
 11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 07.04.14 Pazartesi 10.30 D3-D4 1 Matematik II 07.04.14 Pazartesi 15.30 OD1 1 Mukavemet 08.04.14 Salı 15.30 OD1 1 Beton Teknolojisi 09.04.14 Çarşamba
11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 07.04.14 Pazartesi 10.30 D3-D4 1 Matematik II 07.04.14 Pazartesi 15.30 OD1 1 Mukavemet 08.04.14 Salı 15.30 OD1 1 Beton Teknolojisi 09.04.14 Çarşamba
Endüstriyel Robotlar ve Fanuc R-J3iC Robot Deneyi
 Endüstriyel Robotlar ve Fanuc R-J3iC Robot Deneyi Arş.Gör. Yusuf ŞAHİN Arş.Gör. Abdullah ÇAKAN 1. Amaç Bu deneyde Puma tipi Fanuc R-J3iC model 6+1 serbestliğe sahip robot incelenecektir. Çalışmada robot
Endüstriyel Robotlar ve Fanuc R-J3iC Robot Deneyi Arş.Gör. Yusuf ŞAHİN Arş.Gör. Abdullah ÇAKAN 1. Amaç Bu deneyde Puma tipi Fanuc R-J3iC model 6+1 serbestliğe sahip robot incelenecektir. Çalışmada robot
Akdeniz Üniversitesi
 Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 017 Müfredatı 1 0 TDB101 Türk Dili 1 11 MAK109 Fizik 1 1 180 MAK10 Makina Mühendisliğine Giriş 88 MAK101
Akdeniz Üniversitesi Makine Mühendisliği Bölümü Makine Mühendisliği (Örgün Öğretim) Diploma Programı 017 Müfredatı 1 0 TDB101 Türk Dili 1 11 MAK109 Fizik 1 1 180 MAK10 Makina Mühendisliğine Giriş 88 MAK101
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.org ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (2) 69-78 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Endüstriyel Robotlar Bekir ÇENGELCİ, Hasan ÇİMEN Afyon Kocatepe Üniversitesi,
www.teknolojikarastirmalar.org ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (2) 69-78 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Endüstriyel Robotlar Bekir ÇENGELCİ, Hasan ÇİMEN Afyon Kocatepe Üniversitesi,
MARMARA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ. Elektrik ve Elektronik Mühendisliği
 MARMARA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik ve Elektronik Mühendisliği Elektrik ve Elektronik Mühendisliği Misyonumuz Öğrencilerine mühendislik için gerekli bilgi ve beceriyi yüksek kalitede sağlayarak
MARMARA ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ Elektrik ve Elektronik Mühendisliği Elektrik ve Elektronik Mühendisliği Misyonumuz Öğrencilerine mühendislik için gerekli bilgi ve beceriyi yüksek kalitede sağlayarak
Robotik Otomasyon Endüstriyel Robotlara Genel Bakış
 Robotik Otomasyon Endüstriyel Robotlara Genel Bakış 2 Endüstriyel Robotlar 3 Omron'un 5 faydası Yeni Omron Robotik Otomasyon, sunduğu 5 temel fayda sayesinde en zorlu üretim hatlarını geliştiriyor Performans
Robotik Otomasyon Endüstriyel Robotlara Genel Bakış 2 Endüstriyel Robotlar 3 Omron'un 5 faydası Yeni Omron Robotik Otomasyon, sunduğu 5 temel fayda sayesinde en zorlu üretim hatlarını geliştiriyor Performans
DİNAMİK - 2. Yrd. Doç. Dr. Mehmet Ali Dayıoğlu. Ankara Üniversitesi Ziraat Fakültesi. Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü
 DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
DİNAMİK - 2 Yrd. Doç. Dr. Mehmet Ali Dayıoğlu Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları ve Teknolojileri Mühendisliği Bölümü http://acikders.ankara.edu.tr/course/view.php?id=190 2. HAFTA Kapsam:
Üçüncü Bölüm : Otomasyon Kavramı, Çeşitleri ve Faydaları Hazırlayan
 TEKNOLOJİ KULLANIMI Üçüncü Bölüm : Otomasyon Kavramı, Çeşitleri ve Faydaları Hazırlayan ÖĞR. GÖR. Hamza CORUT İŞLEYİŞ AŞAMALARI Birinci Aşama: İçerik Sunumu İkinci Aşama: İçeriğin Anlatımı Üçüncü Aşama:
TEKNOLOJİ KULLANIMI Üçüncü Bölüm : Otomasyon Kavramı, Çeşitleri ve Faydaları Hazırlayan ÖĞR. GÖR. Hamza CORUT İŞLEYİŞ AŞAMALARI Birinci Aşama: İçerik Sunumu İkinci Aşama: İçeriğin Anlatımı Üçüncü Aşama:
Mekanik. Mühendislik Matematik
 Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
Mekanik Kuvvetlerin etkisi altında cisimlerin denge ve hareket şartlarını anlatan ve inceleyen bir bilim dalıdır. Amacı fiziksel olayları açıklamak, önceden tahmin etmek ve böylece mühendislik uygulamalarına
MOTOR SÜRÜCÜLERİ VE ROBOTİK. Dersin Modülleri Süre Kazandırılan Yeterlikler Servo Motor ve
 MOTOR SÜRÜCÜLERİ VE ROBOTİK Dersin Modülleri Süre Kazandırılan Yeterlikler Servo Motor ve Servo motor ve sürücülerin bağlantısını ve 40/32 Sürücüleri kontrolünü yapmak Step Motor ve Step motorun sürücü
MOTOR SÜRÜCÜLERİ VE ROBOTİK Dersin Modülleri Süre Kazandırılan Yeterlikler Servo Motor ve Servo motor ve sürücülerin bağlantısını ve 40/32 Sürücüleri kontrolünü yapmak Step Motor ve Step motorun sürücü
Araştırma Geliştirme Ltd. Şti. - Firma Tanıtım Sunumu -
 Araştırma Geliştirme Ltd. Şti. - Firma Tanıtım Sunumu - Şubat 2013 Hakkımızda Firma Profili Ekip Faaliyet Alanları Firma Profili Hakkımızda Bilim, Sanayi ve Teknoloji Bakanlığı nın 2012 Teknogirişim Sermaye
Araştırma Geliştirme Ltd. Şti. - Firma Tanıtım Sunumu - Şubat 2013 Hakkımızda Firma Profili Ekip Faaliyet Alanları Firma Profili Hakkımızda Bilim, Sanayi ve Teknoloji Bakanlığı nın 2012 Teknogirişim Sermaye
PROF.DR. İBRAHİM YÜKSEL
 MANİPÜLATÖR TASARIMI Sayfa No: - 1 - PROF.DR. İBRAHİM YÜKSEL ADI... : Sunay SOYADI... : DOĞAN NUMARASI... : M0120014 TESLİM TARİHİ.: 29-12-2006-1 - MANİPÜLATÖR TASARIMI Sayfa No: - 2 - İÇİNDEKİLER AMAÇ.:
MANİPÜLATÖR TASARIMI Sayfa No: - 1 - PROF.DR. İBRAHİM YÜKSEL ADI... : Sunay SOYADI... : DOĞAN NUMARASI... : M0120014 TESLİM TARİHİ.: 29-12-2006-1 - MANİPÜLATÖR TASARIMI Sayfa No: - 2 - İÇİNDEKİLER AMAÇ.:
ROBOT OTOMASYONU SAKARYA ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU. Doç.Dr. Akın Oğuz KAPTI
 ROBOT OTOMASYONU MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU Doç.Dr. Akın Oğuz KAPTI Endüstriyel Robotlar 2 Robotlar, sensörel bilgi ile çevresini algılayan, algıladıklarını yorumlayan, yapay
ROBOT OTOMASYONU MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ KALIPÇILIK TEKNİĞİ DERS NOTU Doç.Dr. Akın Oğuz KAPTI Endüstriyel Robotlar 2 Robotlar, sensörel bilgi ile çevresini algılayan, algıladıklarını yorumlayan, yapay
KONTROL VE OTOMASYON MÜH. BÖLÜMÜ
 KONTROL VE OTOMASYON MÜH. BÖLÜMÜ http://www.kontrol.itu.edu.tr İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ KONTROL ve OTOMASYON MÜHENDİSLİĞİ NEDİR Kontrol ve Otomasyon Mühendisliği; elektrik,
KONTROL VE OTOMASYON MÜH. BÖLÜMÜ http://www.kontrol.itu.edu.tr İSTANBUL TEKNİK ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK FAKÜLTESİ KONTROL ve OTOMASYON MÜHENDİSLİĞİ NEDİR Kontrol ve Otomasyon Mühendisliği; elektrik,
www.gunmak.com.tr Robot & Robotik Sistemler Montaj Otomasyonu Dozaj Sistemleri Püskürtme Sistemleri Bağlantı Elemanları Endüstriyel Aletletler
 www.gunmak.com.tr Robot & Robotik Sistemler Montaj Otomasyonu Dozaj Sistemleri Pompalar Püskürtme Sistemleri Bağlantı Elemanları Endüstriyel Aletletler Kawasaki Robot, 50 yılı aşkın tecrübesi ve ürettiği
www.gunmak.com.tr Robot & Robotik Sistemler Montaj Otomasyonu Dozaj Sistemleri Pompalar Püskürtme Sistemleri Bağlantı Elemanları Endüstriyel Aletletler Kawasaki Robot, 50 yılı aşkın tecrübesi ve ürettiği
T.C. SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ DEKANLIĞI FAKÜLTE KURULU KARARLARI
 TOPLANTI TARİHİ TOPLANTI SAYISI KARAR SAYISI 06.07.2017 062 01-01 Fakülte Kurulumuz Dekan V. Prof. Dr. Reşat SELBAŞ başkanlığında aşağıdaki gündem maddelerini görüşmek üzere toplanmıştır. KARARLAR: 01-
TOPLANTI TARİHİ TOPLANTI SAYISI KARAR SAYISI 06.07.2017 062 01-01 Fakülte Kurulumuz Dekan V. Prof. Dr. Reşat SELBAŞ başkanlığında aşağıdaki gündem maddelerini görüşmek üzere toplanmıştır. KARARLAR: 01-
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı Cuma : Robotik Sistemlere Giriş 10:00 12:50
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr Ders Adı Cuma : Robotik Sistemlere Giriş 10:00 12:50
MKT 2134 ENDÜSTRİYEL ROBOTLAR
 MKT 2134 ENDÜSTRİYEL ROBOTLAR Robotun Tanımı : Amerika Robot Enstitüsü (1979) robotu, malzemeleri, araçları, parçaları hareket ettirmek için dizayn edilmiş programlanabilen çok fonksiyonlu manipülatörler
MKT 2134 ENDÜSTRİYEL ROBOTLAR Robotun Tanımı : Amerika Robot Enstitüsü (1979) robotu, malzemeleri, araçları, parçaları hareket ettirmek için dizayn edilmiş programlanabilen çok fonksiyonlu manipülatörler
Online teknik sayfa. L230-P580A7K15300 Lincoder L230 ÜRÜN PORTFOLYOSU
 Online teknik sayfa L230-P580A7K15300 Lincoder L230 A B C D E F Resimler farklı olabilir Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar Stok no. L230-P580A7K15300 1033569 www.sick.com/lincoder_l230
Online teknik sayfa L230-P580A7K15300 Lincoder L230 A B C D E F Resimler farklı olabilir Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar Stok no. L230-P580A7K15300 1033569 www.sick.com/lincoder_l230
1. DÖNEM Kodu Dersin Adı T U K. Matematik II Mathematics II (İng) Fizik I 3 2 4. Bilgisayar Programlama I (Java) Computer Programming I (Java) (İng)
 Fizik I 3 2 4. Bilgisayar Programlama I (Java) Computer Programming I (Java) (İng)") Müfredat: Mekatronik Mühendisliği lisans programından mezun olacak bir öğrencinin toplam 131 kredilik ders alması gerekmektedir. Bunların 8 kredisi öğretim dili Türkçe ve 123 kredisi öğretim dili İngilizce
Müfredat: Mekatronik Mühendisliği lisans programından mezun olacak bir öğrencinin toplam 131 kredilik ders alması gerekmektedir. Bunların 8 kredisi öğretim dili Türkçe ve 123 kredisi öğretim dili İngilizce
SEVGİNUR KİYAT SAADET YOLDAŞ
 SEVGİNUR KİYAT 201420404006 SAADET YOLDAŞ 201320404007 Yapay Zeka Teknolojileri,Balıkesir Üniversitesi,2017 Robotiğin Tarihçesi Robotiğin tarihçesi, M.Ö 350 yılında, Archytas isimli bir Antik Yunan matematikçinin
SEVGİNUR KİYAT 201420404006 SAADET YOLDAŞ 201320404007 Yapay Zeka Teknolojileri,Balıkesir Üniversitesi,2017 Robotiğin Tarihçesi Robotiğin tarihçesi, M.Ö 350 yılında, Archytas isimli bir Antik Yunan matematikçinin
ÖĞRENME FAALİYETİ 49
 AMAÇ ÖĞRENME FAALİYETİ 49 UÇAK BAKIM TEKNOLOJİSİ Bu faaliyet sonucunda, ulusal ve uluslararası anlaşmaların belirlediği standartlarda Uçak Bakım alanındaki meslekleri tanıyacaksınız. A. ALANIN MEVCUT DURUMU
AMAÇ ÖĞRENME FAALİYETİ 49 UÇAK BAKIM TEKNOLOJİSİ Bu faaliyet sonucunda, ulusal ve uluslararası anlaşmaların belirlediği standartlarda Uçak Bakım alanındaki meslekleri tanıyacaksınız. A. ALANIN MEVCUT DURUMU
ÖĞRENME FAALİYETİ 49
 AMAÇ ÖĞRENME FAALİYETİ 49 UÇAK BAKIM TEKNOLOJİSİ Bu faaliyet sonucunda, ulusal ve uluslararası anlaşmaların belirlediği standartlarda Uçak Bakım alanındaki meslekleri tanıyacaksınız. A. ALANIN MEVCUT DURUMU
AMAÇ ÖĞRENME FAALİYETİ 49 UÇAK BAKIM TEKNOLOJİSİ Bu faaliyet sonucunda, ulusal ve uluslararası anlaşmaların belirlediği standartlarda Uçak Bakım alanındaki meslekleri tanıyacaksınız. A. ALANIN MEVCUT DURUMU
TEKNOLOJİ VE TASARIM DERSİ
 TEKNOLOJİ VE TASARIM DERSİ 7.A.1. Teknoloji ve Tasarım Öğreniyorum Burdur İl Koordinatörleri Teknoloji Nedir? Teknoloji, insanların gereksinimlerine(ihtiyaçlarına) uygun yardımcı araç ve aletlerin yapılması
TEKNOLOJİ VE TASARIM DERSİ 7.A.1. Teknoloji ve Tasarım Öğreniyorum Burdur İl Koordinatörleri Teknoloji Nedir? Teknoloji, insanların gereksinimlerine(ihtiyaçlarına) uygun yardımcı araç ve aletlerin yapılması
MİLLİ SAVUNMA ÜNİVERSİTESİ HAVA ASTSUBAY MESLEK YÜKSEK OKULU EĞİTİM-ÖĞRETİM YILI DERS PROGRAMI
 Program: Uçak Teknolojisi (Mekanik Dalı) MİLLİ SAVUNMA ÜNİVERSİTESİ Teori Uygulama I. Teori Uygulama 1306300 Fizik-II Z 2 1 1 2 2 1507602 İngilizce-II Z 8 6 2 7 7 II. 1868901 Havacılık İngilizcesi-I Z
Program: Uçak Teknolojisi (Mekanik Dalı) MİLLİ SAVUNMA ÜNİVERSİTESİ Teori Uygulama I. Teori Uygulama 1306300 Fizik-II Z 2 1 1 2 2 1507602 İngilizce-II Z 8 6 2 7 7 II. 1868901 Havacılık İngilizcesi-I Z
ENDÜSTRĐYEL ROBOTLARIN YAPILARI, KULLANIM ALANLARI VE MARKET ĐSTATĐSTĐKLERĐ
 ENDÜSTRĐYEL ROBOTLARIN YAPILARI, KULLANIM ALANLARI VE MARKET ĐSTATĐSTĐKLERĐ Hikmet KOCA 1 Mustafa DOĞAN 2 M. Cengiz TAPLAMACIOĞLU 1 hkoca@gazi.edu.tr mudogan@baskent.edu.tr taplam@gazi.edu.tr 1 Elektrik-Elektronik
ENDÜSTRĐYEL ROBOTLARIN YAPILARI, KULLANIM ALANLARI VE MARKET ĐSTATĐSTĐKLERĐ Hikmet KOCA 1 Mustafa DOĞAN 2 M. Cengiz TAPLAMACIOĞLU 1 hkoca@gazi.edu.tr mudogan@baskent.edu.tr taplam@gazi.edu.tr 1 Elektrik-Elektronik
ROBOT TEKNOLOJISI. Ege Üniversitesi Ege MYO Mekatronik Programı
 ROBOT TEKNOLOJISI Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 1 Robotik İçerik Giriş Robot nedir? Neden kullanılır? Robotun tarihçesi Robot uygulamaları Dersin işleyişi Ön koşul Yararlanabileceğiniz
ROBOT TEKNOLOJISI Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 1 Robotik İçerik Giriş Robot nedir? Neden kullanılır? Robotun tarihçesi Robot uygulamaları Dersin işleyişi Ön koşul Yararlanabileceğiniz
ERCİYES ÜNİV. MÜHENDİSLİK FAK. MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ YANDAL EĞİTİM PLANLARI MAKİNA MÜHENDİSLİĞİ İÇİN YANDAL EĞİTİM PLANI
 ERCİYES ÜNİV. MÜHENDİSLİK FAK. MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ 17-18 YANDAL EĞİTİM PLANLARI MAKİNA MÜHENDİSLİĞİ İÇİN YANDAL EĞİTİM PLANI. YARIYIL MEM 9 ELEKTRONİK DEVRELER-I TOPLAM. YARIYIL MEM MEM 8 MEM
ERCİYES ÜNİV. MÜHENDİSLİK FAK. MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ 17-18 YANDAL EĞİTİM PLANLARI MAKİNA MÜHENDİSLİĞİ İÇİN YANDAL EĞİTİM PLANI. YARIYIL MEM 9 ELEKTRONİK DEVRELER-I TOPLAM. YARIYIL MEM MEM 8 MEM
teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir.
 teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir. irvision, FANUC R-30iA Kontrolörü için bir entegre robot görme
teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir. irvision, FANUC R-30iA Kontrolörü için bir entegre robot görme
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V4 DERS PLANI (2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN) 1.Sınıf / Güz
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V4 DERS PLANI (2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN) 1.Sınıf / Güz
ELEKTRİK ELEKTRONİK MÜHENDSİLİĞİ BÖLÜMÜ EĞİTİM ÖĞRETİM YILI YENİ MÜFREDATI
 ELEKTRİK ELEKTRONİK MÜHENDSİLİĞİ BÖLÜMÜ 2017-2018 EĞİTİM ÖĞRETİM YILI YENİ MÜFREDATI 1. YARIYIL Adı Z/S T U L K AKTS 1 0500101 Fizik I Z 4 2 0 5 6 2 0500102 Kimya I Z 3 2 0 4 6 3 0500103 Matematik I Z
ELEKTRİK ELEKTRONİK MÜHENDSİLİĞİ BÖLÜMÜ 2017-2018 EĞİTİM ÖĞRETİM YILI YENİ MÜFREDATI 1. YARIYIL Adı Z/S T U L K AKTS 1 0500101 Fizik I Z 4 2 0 5 6 2 0500102 Kimya I Z 3 2 0 4 6 3 0500103 Matematik I Z
F.Ü. Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü. 1. Sınıf
 F.Ü. Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü 1. Sınıf 1 MAT161 Matematik I 4 0 4 6 1 MAT162 Matematik II 4 0 4 6 2 FİZ111 Fizik I 4 0 4 6 2 FİZ112 Fizik II 3 0 3 5 3 FİZ105 Fizik Lab. I 0 2
F.Ü. Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü 1. Sınıf 1 MAT161 Matematik I 4 0 4 6 1 MAT162 Matematik II 4 0 4 6 2 FİZ111 Fizik I 4 0 4 6 2 FİZ112 Fizik II 3 0 3 5 3 FİZ105 Fizik Lab. I 0 2
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V5 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI İKİNCİ ve ÜST SINIFLAR) Açıklama:
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V5 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI İKİNCİ ve ÜST SINIFLAR) Açıklama:
2.4 Robotik: Robotiğin Temeli ve Robotların Geleceği
 Kyriakopoulos, Kostas J., and Savvas G. Loizou. 26. Section 2.4 Robotics: Fundamentals and Prospects, pp. 93-17, of Chapter 2 Hardware, in CIGR Handbook of Agricultural Engineering Volume VI Information
Kyriakopoulos, Kostas J., and Savvas G. Loizou. 26. Section 2.4 Robotics: Fundamentals and Prospects, pp. 93-17, of Chapter 2 Hardware, in CIGR Handbook of Agricultural Engineering Volume VI Information
ENDÜSTRİYEL ROBOTLAR VE UYGULAMA ALANLARI. Hasan ERSÖZ YÜKSEK LİSANS TEZİ ENDÜSTRİYEL TEKNOLOJİ EĞİTİMİ GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
 ENDÜSTRİYEL ROBOTLAR VE UYGULAMA ALANLARI Hasan ERSÖZ YÜKSEK LİSANS TEZİ ENDÜSTRİYEL TEKNOLOJİ EĞİTİMİ GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ARALIK 2007 ANKARA Hasan ERSÖZ tarafından hazırlanan ENDÜSTRİYEL
ENDÜSTRİYEL ROBOTLAR VE UYGULAMA ALANLARI Hasan ERSÖZ YÜKSEK LİSANS TEZİ ENDÜSTRİYEL TEKNOLOJİ EĞİTİMİ GAZİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ ARALIK 2007 ANKARA Hasan ERSÖZ tarafından hazırlanan ENDÜSTRİYEL
CAM (CNC) PROGRAMLAMA. Otomatik üretim 1. parçası üretmek
 PROGRAMLAMA. Otomatik üretim 1. parçası üretmek") CAM (CNC) PROGRAMLAMA Dersin Modülleri Otomatik üretim 1 Otomatik üretim 1 Kazandırılan Yeterlikler CAM programı kullanarak CNC ile iş parçası üretmek DERSİN ADI ALAN MESLEK / DAL DERSİN OKUTULACAĞI DÖNEM
CAM (CNC) PROGRAMLAMA Dersin Modülleri Otomatik üretim 1 Otomatik üretim 1 Kazandırılan Yeterlikler CAM programı kullanarak CNC ile iş parçası üretmek DERSİN ADI ALAN MESLEK / DAL DERSİN OKUTULACAĞI DÖNEM
Artesis Varlık Yönetim Sistemi. simplifies predictive maintenance
 Artesis Varlık Yönetim Sistemi Artesis Hakkında ARTESİS 1989-1999 yılları arasında Prof.Dr. Ahmet Duyar ın (Florida Atlantic University) NASA Lewis Research Center ile birlikte yaptığı, uzay mekiği ana
Artesis Varlık Yönetim Sistemi Artesis Hakkında ARTESİS 1989-1999 yılları arasında Prof.Dr. Ahmet Duyar ın (Florida Atlantic University) NASA Lewis Research Center ile birlikte yaptığı, uzay mekiği ana
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN 1.Sınıf / Güz Dönemi FIZ-137 KIM-607 Fizik
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2016-2017 EĞİTİM-ÖĞRETİM YILI NDAN İTİBAREN 1.Sınıf / Güz Dönemi FIZ-137 KIM-607 Fizik
1. SINIF GÜZ YARIYILI Y. YIL ÖN KOŞUL DERSİN KODU DERSİN ADI Z/S T U L TOPLAM KREDİ AKTS
 1. SINIF GÜZ YARII I.YARI ADI Z/S T U L KREDİ AKTS UNV13101 TÜRK DİLİ-I Z 2 0 0 2 2 2 UNV13103 ATATÜRK İLKELERİ VE INKILAP TARİHİ-I Z 2 0 0 2 2 2 UNV13105 İNGİLİZCE-I Z 4 0 0 4 4 4 UNV13107 TEMEL BİLGİ
1. SINIF GÜZ YARII I.YARI ADI Z/S T U L KREDİ AKTS UNV13101 TÜRK DİLİ-I Z 2 0 0 2 2 2 UNV13103 ATATÜRK İLKELERİ VE INKILAP TARİHİ-I Z 2 0 0 2 2 2 UNV13105 İNGİLİZCE-I Z 4 0 0 4 4 4 UNV13107 TEMEL BİLGİ
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
1.SINIF 1. YARIYIL Matematik I Fizik I Yabancı Dil I Türk Dili I
 1.SINIF 1. YARIYIL 0507101 Matematik I 4 0 0 4 6 0507102 Fizik I 4 0 0 4 6 0507103 Yabancı Dil I 2 0 0 2 2 0507104 Türk Dili I 2 0 0 2 2 0507105 Atatürk İlkeleri ve İnkılap Tarihi I 2 0 0 2 2 0507106 Bilgisayar
1.SINIF 1. YARIYIL 0507101 Matematik I 4 0 0 4 6 0507102 Fizik I 4 0 0 4 6 0507103 Yabancı Dil I 2 0 0 2 2 0507104 Türk Dili I 2 0 0 2 2 0507105 Atatürk İlkeleri ve İnkılap Tarihi I 2 0 0 2 2 0507106 Bilgisayar
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 7. Hafta Aktüatörler Aktüatör nedir? Aktüatöre neden ihtiyaç duyulur? Aktüatör Türleri Hidrolik-Pnömatik Aktüatörler Elektrikli Aktüatörler Bu Haftanın Konu Başlıkları SAÜ - Sakarya
Mekatroniğe Giriş Dersi 7. Hafta Aktüatörler Aktüatör nedir? Aktüatöre neden ihtiyaç duyulur? Aktüatör Türleri Hidrolik-Pnömatik Aktüatörler Elektrikli Aktüatörler Bu Haftanın Konu Başlıkları SAÜ - Sakarya
MEKATRONİĞİN TEMELLERİ
 MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
1. SINIF GÜZ YARIYILI Y. YIL ÖN KOŞUL DERSİN KODU DERSİN ADI Z/S T U L TOPLAM KREDİ AKTS
 III.YARI II.YARI I.YARI 1. SINIF GÜZ YARII ADI Z/S T U L KREDİ AKTS UNV13101 TÜRK DİLİ-I Z 2 0 0 2 2 2 UNV13103 ATATÜRK İLKELERİ VE INKILAP TARİHİ-I Z 2 0 0 2 2 2 UNV13105 İNGİLİZCE-I Z 4 0 0 4 4 4 MUF16101
III.YARI II.YARI I.YARI 1. SINIF GÜZ YARII ADI Z/S T U L KREDİ AKTS UNV13101 TÜRK DİLİ-I Z 2 0 0 2 2 2 UNV13103 ATATÜRK İLKELERİ VE INKILAP TARİHİ-I Z 2 0 0 2 2 2 UNV13105 İNGİLİZCE-I Z 4 0 0 4 4 4 MUF16101
MLS-310 MANYETİK LİNEER ENCODER SİSTEMİ
 MLS-310 MANYETİK LİNEER ENCODER SİSTEMİ KENDİNDEN YATAKLANMIŞ KAPALI ÖLÇÜM SİSTEMİ Manyetik Temassız Lineer Encoder Sistem 5 µm 'den 62,5 µm ' ye kadar Çözünürlük Değerleri 0,001-0,005-0,010-0,025-0,050
MLS-310 MANYETİK LİNEER ENCODER SİSTEMİ KENDİNDEN YATAKLANMIŞ KAPALI ÖLÇÜM SİSTEMİ Manyetik Temassız Lineer Encoder Sistem 5 µm 'den 62,5 µm ' ye kadar Çözünürlük Değerleri 0,001-0,005-0,010-0,025-0,050
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ. Isı Transferi MK-322 3/Bahar (4+0+0) 4 5
 4 5") MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Isı Transferi MK-322 3/Bahar (4+0+0) 4 5 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
MAKİNE MÜHENDİSLİĞİ BÖLÜM BAŞKANLIĞI DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Ders Saati (T+U+L) Kredi AKTS Isı Transferi MK-322 3/Bahar (4+0+0) 4 5 Dersin Dili : Türkçe Dersin Seviyesi : Lisans,
SERVOPNÖMATİK TEKNOLOJİSİNİN ROBOT SİSTEMLERE SAĞLADIĞI AVANTAJLAR
 Bu bir MMO yayınıdır SERVOPNÖMATİK TEKNOLOJİSİNİN ROBOT SİSTEMLERE SAĞLADIĞI AVANTAJLAR Savaş AYTEK 1 1 KUKA Roboter CEE GmbH Türkiye Şubesi 583 SERVOPNÖMATİK TEKNOLOJİSİNİN ROBOT SİSTEMLERE SAĞLADIĞI
Bu bir MMO yayınıdır SERVOPNÖMATİK TEKNOLOJİSİNİN ROBOT SİSTEMLERE SAĞLADIĞI AVANTAJLAR Savaş AYTEK 1 1 KUKA Roboter CEE GmbH Türkiye Şubesi 583 SERVOPNÖMATİK TEKNOLOJİSİNİN ROBOT SİSTEMLERE SAĞLADIĞI
ÜRÜN BROŞÜRÜ 7.10.7 SF. Atölye Ortamı Koordinat Ölçüm Cihazı
 ÜRÜN BROŞÜRÜ 7.10.7 SF Atölye Ortamı Koordinat Ölçüm Cihazı Hexagon Metrology 7.10.7 SF Üretim Noktasında Kaliteye Bakış Hexagon Metrology 7.10.7 SF, kalite kontrolü için başka hiçbir CMM in zorlu atölye
ÜRÜN BROŞÜRÜ 7.10.7 SF Atölye Ortamı Koordinat Ölçüm Cihazı Hexagon Metrology 7.10.7 SF Üretim Noktasında Kaliteye Bakış Hexagon Metrology 7.10.7 SF, kalite kontrolü için başka hiçbir CMM in zorlu atölye
Bilgisayar Mühendisliği. Bilgisayar Mühendisliğine Giriş 1
 Bilgisayar Mühendisliği Bilgisayar Mühendisliğine Giriş 1 Mühendislik Nedir? Mühendislik, bilim ve matematiğin yararlı cihaz ve sistemlerin üretimine uygulanmasıdır. Örn: Elektrik mühendisleri, elektronik
Bilgisayar Mühendisliği Bilgisayar Mühendisliğine Giriş 1 Mühendislik Nedir? Mühendislik, bilim ve matematiğin yararlı cihaz ve sistemlerin üretimine uygulanmasıdır. Örn: Elektrik mühendisleri, elektronik
MAK1002 STATİK Zorunlu YAD112 YABANCI DİL II (ALMANCA) Zorunlu
 Zorunlu") Mühendislik-Mimarlık Fakültesi Makine Mühendisliği 1. Yarıyıl Dersleri MAT1071 MATEMATİK I Zorunlu 3 2.00 0 6.00 MAK1005 BİLGİSAYAR PROGRAMLAMAYA GİRİŞ Zorunlu 2 0.00 1 4.00 MAK1001 MAKİNE MÜHENDİSLİĞİNE
Mühendislik-Mimarlık Fakültesi Makine Mühendisliği 1. Yarıyıl Dersleri MAT1071 MATEMATİK I Zorunlu 3 2.00 0 6.00 MAK1005 BİLGİSAYAR PROGRAMLAMAYA GİRİŞ Zorunlu 2 0.00 1 4.00 MAK1001 MAKİNE MÜHENDİSLİĞİNE
Biz Kimiz? İçindekiler
 İçindekiler Biz Kimiz? Tek Eksen Pozisyonerler Çok Eksenli Pozisyonerler Robot Slider Lizar Motion Serisi GantryPillar Robot Sistemleri RP Serisi Döner Pozisyonerler RPD Serisi Döner Pozisyonerler TH Serisi
İçindekiler Biz Kimiz? Tek Eksen Pozisyonerler Çok Eksenli Pozisyonerler Robot Slider Lizar Motion Serisi GantryPillar Robot Sistemleri RP Serisi Döner Pozisyonerler RPD Serisi Döner Pozisyonerler TH Serisi
MAK 101 Makine Mühendisliğine Giriş. Mühendislik Branşları Örnekleri. Mühendislik. Makine Mühendislerinin İşleri Arasında:
 MAK 101 Makine Mühendisliğine Giriş Makine Mühendisliği Konuları Temel Ve Mühendislik Yaklaşımı Mühendislik Engineering(ingenerare) : Yaratmak Mühendislik: Temel Bilimleri kullanarak; yapılar, aletler
MAK 101 Makine Mühendisliğine Giriş Makine Mühendisliği Konuları Temel Ve Mühendislik Yaklaşımı Mühendislik Engineering(ingenerare) : Yaratmak Mühendislik: Temel Bilimleri kullanarak; yapılar, aletler
Mühendisli e Giri Yrd.Doç.Dr.Hilmi Ku çu
 MAK NA TEOR VE D NAM ANAB M DALI Makina Teorisi ve Dinami i Anabilim Dal ; makina alet ve cihazlar n, ak lc, bilimsel esaslara göre tasarlan p imal edilebilmeleri için gerekli olan fiziksel ve matematiksel
MAK NA TEOR VE D NAM ANAB M DALI Makina Teorisi ve Dinami i Anabilim Dal ; makina alet ve cihazlar n, ak lc, bilimsel esaslara göre tasarlan p imal edilebilmeleri için gerekli olan fiziksel ve matematiksel
(20/07/2017 tarih, 82 sayılı Senato toplantısının 18 nolu karar ekidir.)
") (20/07/2017 tarih, 82 sayılı Senato toplantısının 18 nolu karar ekidir.) KIRKLARELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ÖRGÜN ÖĞRETİM DERS PLANI (2017-2018 eğitim-öğretim
(20/07/2017 tarih, 82 sayılı Senato toplantısının 18 nolu karar ekidir.) KIRKLARELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ÖRGÜN ÖĞRETİM DERS PLANI (2017-2018 eğitim-öğretim
Endüstri 4.0 Ahmet Furkan GİRGİN. Emrah BİLGİÇ
 Endüstri 4.0 Ahmet Furkan GİRGİN Emrah BİLGİÇ Volkswagen Endüstri 4.0 https://www.youtube.com/watch?v=jtl8w6yajds TARİH BOYUNCA ENDÜSTRİ 4 İLE BİRLİKTE DÖRT BÜYÜK ENDÜSTRİYEL DEVRİM YAŞANMIŞTIR. Su ve
Endüstri 4.0 Ahmet Furkan GİRGİN Emrah BİLGİÇ Volkswagen Endüstri 4.0 https://www.youtube.com/watch?v=jtl8w6yajds TARİH BOYUNCA ENDÜSTRİ 4 İLE BİRLİKTE DÖRT BÜYÜK ENDÜSTRİYEL DEVRİM YAŞANMIŞTIR. Su ve
CIM - Computer Integrated Manufacturing. Ders 1:Open Cim-Giriş
 CIM - Computer Integrated Manufacturing Ders 1:Open Cim-Giriş Otomasyon nedir? Otomasyon daha önce insan gücü ile yapılan işlemlerin makinelerle yapılabilmesi için tasarlanmış, operasyon süreçlerinin insan
CIM - Computer Integrated Manufacturing Ders 1:Open Cim-Giriş Otomasyon nedir? Otomasyon daha önce insan gücü ile yapılan işlemlerin makinelerle yapılabilmesi için tasarlanmış, operasyon süreçlerinin insan
L230-P580B7S00000 Lincoder L230. Online teknik sayfa
 L230-P580B7S00000 Lincoder L230 Online teknik sayfa A B C D E F Resimler farklı olabilir Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar Stok no. L230-P580B7S00000 1033533 www.sick.com/lincoder_l230
L230-P580B7S00000 Lincoder L230 Online teknik sayfa A B C D E F Resimler farklı olabilir Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar Stok no. L230-P580B7S00000 1033533 www.sick.com/lincoder_l230
2009 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / MAKİNE MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ. Ders Kodu Dersin Adı T P K ECTS Ders Tipi
 2009 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / MAKİNE MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ Aİ 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2 0 2 2 ZORUNLU MM 101 GENEL MATEMATİK-I 3 0 3 5 ZORUNLU MM 103 LİNEER
2009 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / MAKİNE MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ Aİ 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2 0 2 2 ZORUNLU MM 101 GENEL MATEMATİK-I 3 0 3 5 ZORUNLU MM 103 LİNEER
T.C NECMETTİN ERBAKAN ÜNİVERSİTESİ MÜHENDİSLİK ve MİMARLIK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI 2+0+0 2 2 3+1+0 3,5 6 2+0+0 2 4 2+0+0 2 2
 1. YARIYIL 0010090001 0010090002 0010090003 ADI T+U+L KREDİ Makine Mühendisliğine Giriş Bilgisayar Destekli Teknik Resim 1 Temel Bilgi Teknolojisi 3+1+0 3,5 6 2+0+0 2 4 0010090004 İngilizce 1 0010090005
1. YARIYIL 0010090001 0010090002 0010090003 ADI T+U+L KREDİ Makine Mühendisliğine Giriş Bilgisayar Destekli Teknik Resim 1 Temel Bilgi Teknolojisi 3+1+0 3,5 6 2+0+0 2 4 0010090004 İngilizce 1 0010090005
Online teknik sayfa MVM-03M-2MC-MKLB TTK70 LINEER ENCODER
 Online teknik sayfa MVM-03M-2MC-MKLB TTK70 A B C D E F Resimler farklı olabilir Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar Stok no. MVM-03M-2MC-MKLB 6037421 www.sick.com/ttk70 Ürün açıklaması
Online teknik sayfa MVM-03M-2MC-MKLB TTK70 A B C D E F Resimler farklı olabilir Sipariş bilgileri Tip Diğer cihaz modelleri ve aksesuar Stok no. MVM-03M-2MC-MKLB 6037421 www.sick.com/ttk70 Ürün açıklaması
T.C. UŞAK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ NORMAL ÖĞRETİM
 NORMAL ÖĞRETİM I.SINIF DERSİN KODU DERSİN ADI SAATİ YERİ SORUMLU ÖĞRETİM ÜYESİ 0505001262012 Matematik II 25.05.2018 09:00 Yeşil, Turuncu, Mavi Amfi, 303, 307 Doç. Dr. M.Kemal BERKTAŞ 0505001282012 Fizik
NORMAL ÖĞRETİM I.SINIF DERSİN KODU DERSİN ADI SAATİ YERİ SORUMLU ÖĞRETİM ÜYESİ 0505001262012 Matematik II 25.05.2018 09:00 Yeşil, Turuncu, Mavi Amfi, 303, 307 Doç. Dr. M.Kemal BERKTAŞ 0505001282012 Fizik
MESLEK YÜKSEKOKULU ELEKTRONİK VE OTOMASYON BÖLÜMÜ MEKATRONİK PROGRAMI ENDÜSTRİYEL ROBOTLAR DERS NOTLARI. Öğr. Gör. Kadir GELİŞ
 MESLEK YÜKSEKOKULU ELEKTRONİK VE OTOMASYON BÖLÜMÜ MEKATRONİK PROGRAMI ENDÜSTRİYEL ROBOTLAR DERS NOTLARI Öğr. Gör. Kadir GELİŞ AĞRI- 2014 1 ÖNSÖZ Günümüz teknolojisine paralel olarak insanın yeri günden
MESLEK YÜKSEKOKULU ELEKTRONİK VE OTOMASYON BÖLÜMÜ MEKATRONİK PROGRAMI ENDÜSTRİYEL ROBOTLAR DERS NOTLARI Öğr. Gör. Kadir GELİŞ AĞRI- 2014 1 ÖNSÖZ Günümüz teknolojisine paralel olarak insanın yeri günden
www.muhendisiz.net MEKATRONĐK NEDĐR? Mekatronik Sistemlerin Genel Şeması
 www.muhendisiz.net MEKATRONĐK NEDĐR? Mekatronik; makine, elektrik, elektronik, kontrol sistemleri teknolojisi programları ile bilgisayar yazılım bilim dallarının bir bütünlük içinde algılanmasına dayanan
www.muhendisiz.net MEKATRONĐK NEDĐR? Mekatronik; makine, elektrik, elektronik, kontrol sistemleri teknolojisi programları ile bilgisayar yazılım bilim dallarının bir bütünlük içinde algılanmasına dayanan
T.C. UŞAK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ NORMAL ÖĞRETİM
 NORMAL ÖĞRETİM I.SINIF DERSİN KODU DERSİN ADI SAATİ YERİ SORUMLU ÖĞRETİM ÜYESİ 0505001262012 Matematik II 19.06.2018 11:00 Yeşil, Turuncu, Mavi Amfi Doç. Dr. M.Kemal BERKTAŞ 0505001282012 Fizik II 20.06.2018
NORMAL ÖĞRETİM I.SINIF DERSİN KODU DERSİN ADI SAATİ YERİ SORUMLU ÖĞRETİM ÜYESİ 0505001262012 Matematik II 19.06.2018 11:00 Yeşil, Turuncu, Mavi Amfi Doç. Dr. M.Kemal BERKTAŞ 0505001282012 Fizik II 20.06.2018
FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI 1. YARIYIL:
 1. YARIYIL: ALINABİLMESİ İÇİN ADI T+U+L KREDİ 0010090001 Makine Mühendisliğine Giriş 2+0+0 2 2 0010090002 Bilgisayar Destekli Teknik Resim 1 3+1+0 3,5 6 0010090003 Temel Bilgi Teknolojisi 2+0+0 2 4 0010090004
1. YARIYIL: ALINABİLMESİ İÇİN ADI T+U+L KREDİ 0010090001 Makine Mühendisliğine Giriş 2+0+0 2 2 0010090002 Bilgisayar Destekli Teknik Resim 1 3+1+0 3,5 6 0010090003 Temel Bilgi Teknolojisi 2+0+0 2 4 0010090004
Her 2 teknolojide de, hem ankastre programlama hem de merkezi programlama kullanılır.
 Programlama Programlama nedir? Programlama; ısıtmanın otomatik, gözle görülür biçimde ve kullanıcının ortamda bulunduğu sürelere göre yönetilmesidir. Isıtma süreleri, 7 günlük veya 24 saatlik zaman dilimlerinde
Programlama Programlama nedir? Programlama; ısıtmanın otomatik, gözle görülür biçimde ve kullanıcının ortamda bulunduğu sürelere göre yönetilmesidir. Isıtma süreleri, 7 günlük veya 24 saatlik zaman dilimlerinde
AFYON KOCATEPE ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ MAKİNE MÜHENDİSLİĞİ ANABİLİM DALI BAŞKANLIĞI YÜKSEK LİSANS PROGRAMI
 YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL ADI KREDİSİ* MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL ADI KREDİSİ* MKM-5502 UZMANLIK
YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL ADI KREDİSİ* MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL ADI KREDİSİ* MKM-5502 UZMANLIK
1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2015 %25 V1 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI 1. SINIFTAN İTİBAREN) Açıklama:
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2015 %25 V1 DERS PLANI (2017-2018 EĞİTİM-ÖĞRETİM YILI 1. SINIFTAN İTİBAREN) Açıklama:
Bilişim Teknolojileri Temelleri 2011
 Bölüm 1 Bilişim Teknolojileri Temelleri 2011 Dijital Dünyada Yaşamak Hedefler Bilgisayar kullanabilmenin günümüzde başarılı olmak için neden son derece önemli olduğu Bilgisayar sözcüğünün tanımlanması
Bölüm 1 Bilişim Teknolojileri Temelleri 2011 Dijital Dünyada Yaşamak Hedefler Bilgisayar kullanabilmenin günümüzde başarılı olmak için neden son derece önemli olduğu Bilgisayar sözcüğünün tanımlanması
Robotların Temelleri Dr. Ahmet Özkurt
 Robotların Temelleri Dr. Ahmet Özkurt Robot: Sizce robot nedir? Robot: Tekrar programlanabilen Çok Fonksiyonlu Çevre ile etkileşimli i li Elektromekanik bir araçtır. Robotların çeşitleri: I JIRA Class
Robotların Temelleri Dr. Ahmet Özkurt Robot: Sizce robot nedir? Robot: Tekrar programlanabilen Çok Fonksiyonlu Çevre ile etkileşimli i li Elektromekanik bir araçtır. Robotların çeşitleri: I JIRA Class
YRD.DOÇ.DR. MURAT KIYAK 1
 TAKIM TEZGAHLARI MAK 3042 SUNUM 2 Yrd.Doç.Dr. Murat KIYAK www.yildiz.edu.tr/~.edu.tr/~kiyak kiyak@yildiz.edu.tr 1 http://www.bologna.yildiz.edu.tr/index.php?r=course/view&id=3869&aid=97 2 YRD.DOÇ.DR. MURAT
TAKIM TEZGAHLARI MAK 3042 SUNUM 2 Yrd.Doç.Dr. Murat KIYAK www.yildiz.edu.tr/~.edu.tr/~kiyak kiyak@yildiz.edu.tr 1 http://www.bologna.yildiz.edu.tr/index.php?r=course/view&id=3869&aid=97 2 YRD.DOÇ.DR. MURAT
Hazırlık Sınıfı. 1.Sınıf / Güz Dönemi
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V3 DERS PLANI (2014-2015 EĞİTİM-ÖĞRETİM YILINDAN İTİBAREN) Hazırlık Sınıfı
SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ DERS PLANI (BİRİNCİ VE İKİNCİ ÖĞRETİM) 2012 %25 V3 DERS PLANI (2014-2015 EĞİTİM-ÖĞRETİM YILINDAN İTİBAREN) Hazırlık Sınıfı
Robot & Robotik Sistemler Montaj Otomasyonu Dozaj Sistemleri Püskürtme Sistemleri Bağlantı Elemanları Endüstriyel Aletletler
 www.gunmak.com.tr Robot & Robotik Sistemler Montaj Otomasyonu Dozaj Sistemleri Pompalar Püskürtme Sistemleri Bağlantı Elemanları Endüstriyel Aletletler KULLANIM ALANLARI Yükleme boşaltma Elektronik çip
www.gunmak.com.tr Robot & Robotik Sistemler Montaj Otomasyonu Dozaj Sistemleri Pompalar Püskürtme Sistemleri Bağlantı Elemanları Endüstriyel Aletletler KULLANIM ALANLARI Yükleme boşaltma Elektronik çip
DERS KODU DERS ADI T U K AKTS
 1. SINIF GÜZ YARIYILI (1. YY) MAT110 Matematik I 3 2 4 5 FIZ110 Fizik I 3 2 4 5 KIM110 Kimya 3 0 3 5 MAK110 Makine Mühendisliğine Giriş 2 0 2 3 MAK111 Teknik Resim 2 2 3 6 TUR101 Türk Dili I 2 0 2 2 ATA101
1. SINIF GÜZ YARIYILI (1. YY) MAT110 Matematik I 3 2 4 5 FIZ110 Fizik I 3 2 4 5 KIM110 Kimya 3 0 3 5 MAK110 Makine Mühendisliğine Giriş 2 0 2 3 MAK111 Teknik Resim 2 2 3 6 TUR101 Türk Dili I 2 0 2 2 ATA101