Mikrokontrolcu Portları {\} /\ Suhap SAHIN
|
|
|
- Ata Özcan
- 7 yıl önce
- İzleme sayısı:
Transkript

1 Mikrokontrolcu Portları 0 {\} /\ Suhap SAHIN

2 Gelistirme Ortamının Kurulumu Sanal Makine Programı(VirtualBo) Sanal Makine Dosyasının Kurulumu(ubuntu-kouembedded-v ova)

3 Virtualbo kurulumu

4 Virtualbo kurulumu

5 Sanal Makina Dosyası debian-kou-embedded-v ova
6 Sanal Makina Kurulumu
7 Sanal Makina Kurulumu

8 Sanal Makina Kurulumu

9 Sanal Makina Kurulumu

10 Sanal Makina Kurulumu

11 Sanal Makina Kurulumu

12 Sanal Makina Kurulumu

13 Sanal Makina Kurulumu

14 Sanal Makina Kurulumu

15 Sanal Makina Kurulumu
16 Sanal Makina Kurulumu

17 Sanal Makina Kurulumu

18 Sanal Makina Kurulumu

19 Sanal Makina Kurulumu
20 Sanal Makina Kurulumu

21 Sanal Makina Kurulumu
22 Sanal Makina Kurulumu

23 Sanal Makina Kurulumu

24 Sanal Makina Kurulumu

25 Sanal Makina Kurulumu

26 Sanal Makina Kurulumu
27 Sanal Makina Baslatma

28 Sanal Makina Baslatma
29 Sanal Makina Ayarlanması

30 Sanal Makina Ayarlanması

31 Sanal Makina Ayarlanması

32 Sanal Makina Ayarlanması
33 Kartın Sanal Makinaya Aktarılması

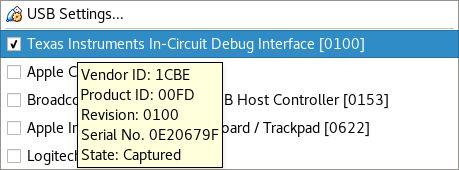
34 Kartın Sanal Makinaya Aktarılması
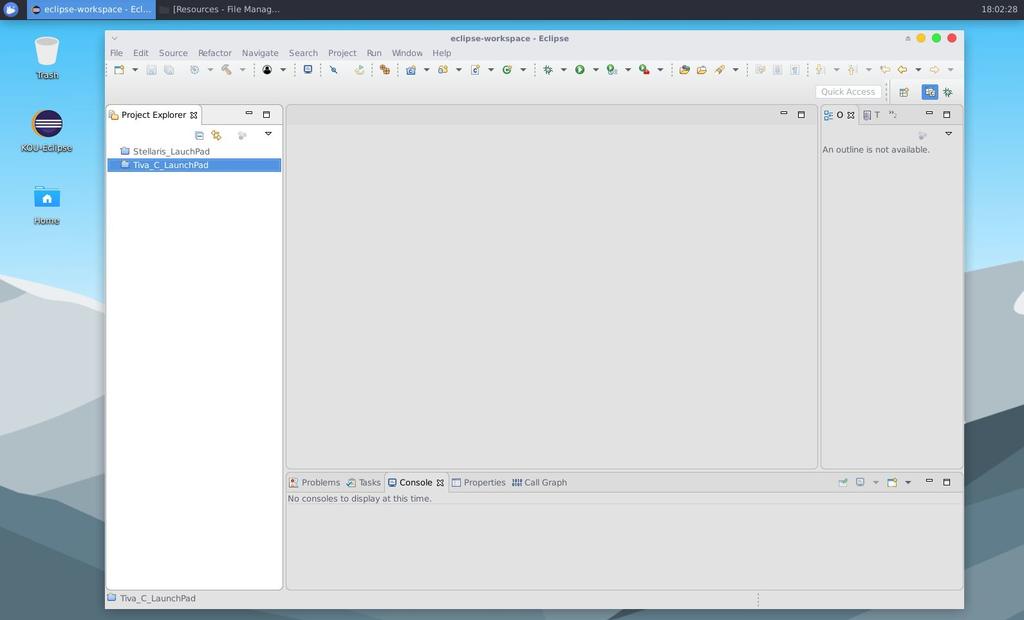
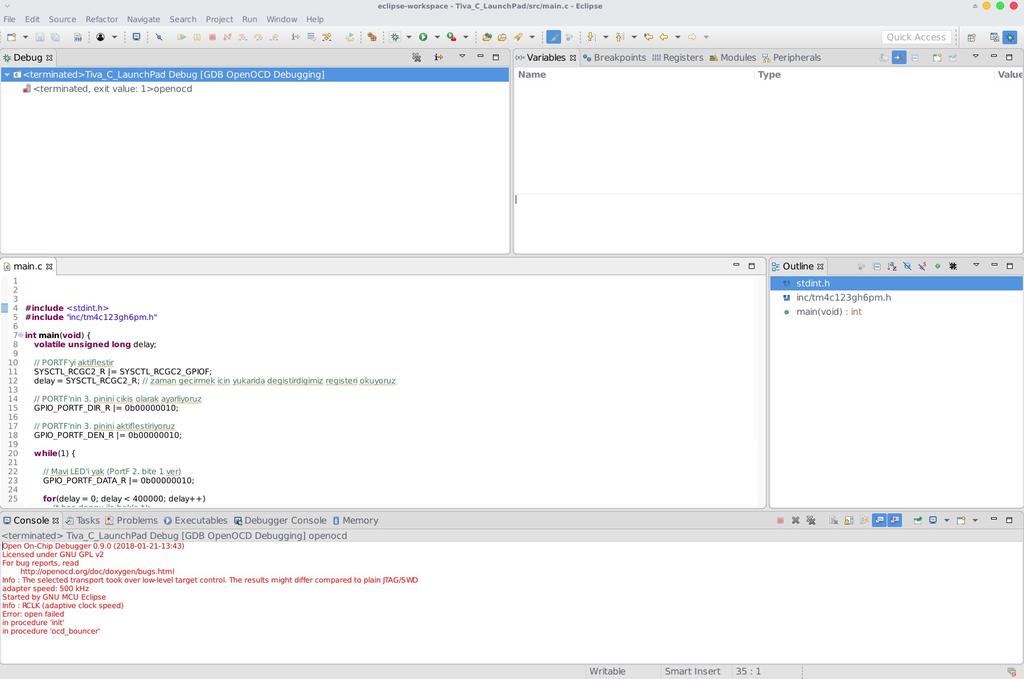
35 Ilk Projenin Çalıstırılması
36 Ilk Projenin Çalıstırılması
37 Ilk Projenin Çalıstırılması
38 Ilk Projenin Çalıstırılması
39 Ilk Projenin Çalıstırılması
40 Ilk Projenin Çalıstırılması

41 Hatalar 1. Stellaris/Tiva donanımları bilgisayara baglı mı? 2. Donanımlar sanal makinaya aktarıldı mı? 3. DEBUG islemi açık unutuldu mu?

42 Gelistirme Kartları Tiva C Series EK-TM4C123GXL Stellaris EK-LM4F120XL
43 Tiva & Stellaris Port Baglantıları

44 Tiva & Stellaris Port Baglantıları
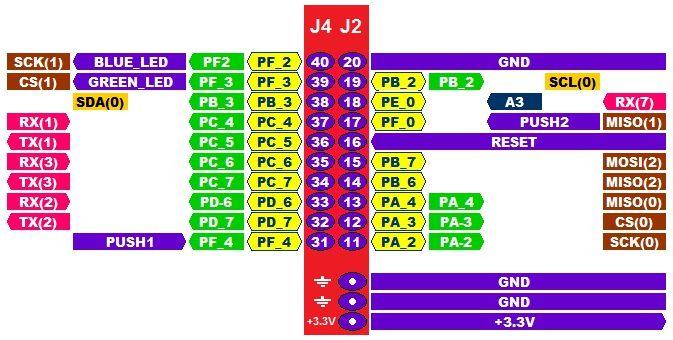
45 Tiva Port Baglantıları

46 Tiva & Stellaris Port Baglantıları

47 Tiva & Stellaris Port Baglantıları
48 I/O Portları Corte M4 8 32k RAM GPIO Port B GPIO Port A 8 Eight UARTs Four I2Cs Four SSIs CAN 2.0 GPIO Port D GPIO Port C 4 Twelve Timers Si 64-bit wide USB 2.0 JTAG 6 GPIO Port F GPIO Port E Two Analog Comparators ADC 2 channels 12 inputs 12 bits Two PWM Modules System Bus 8 5
49 Kartın üzerindeki ledi yakma Kırmızı LED Mavi LED Yesil LED Port F1 --> Kırmızı LED Port F2 --> Mavi LED Port F3 --> Yesil LED
50 Kartın üzerindeki ledi yakma Corte M4 8 32k RAM GPIO Port B GPIO Port A 8 Eight UARTs Four I2Cs Four SSIs CAN 2.0 GPIO Port D GPIO Port C 4 Twelve Timers Si 64-bit wide USB 2.0 JTAG 6 GPIO Port F GPIO Port E Two Analog Comparators ADC 2 channels 12 inputs 12 bits Two PWM Modules System Bus 8 5
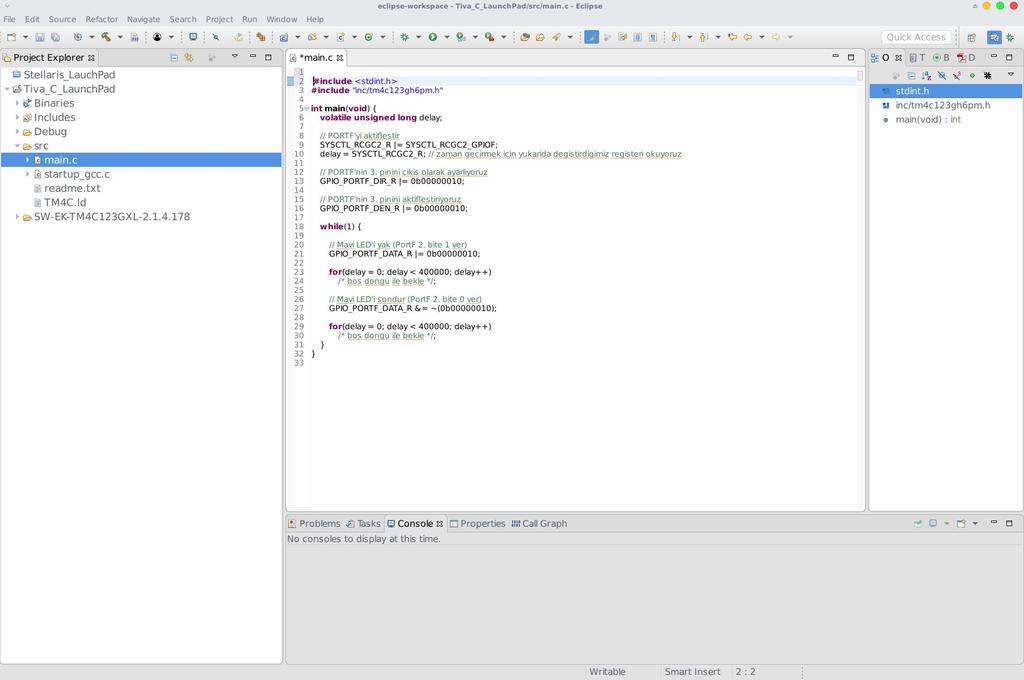
51 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
52 Gerekli Kütüphanelerin Eklenmesi (int8_t, int16_t, int32_t, uint8_t, uint16_t, uint32_t) tipindeki tamsayı değerlerinin kullanılmasını sağlar #include <stdint.h> tiva kütüphanesi #include "inc/tm4c123gh6pm.h" stellaris kütüphanesi #include "inc/lm4f120h5qr.h"
53 Gerekli Kütüphanelerin Eklenmesi (int8_t, int16_t, int32_t, uint8_t, uint16_t, uint32_t) tipindeki tamsayı değerlerinin kullanılmasını sağlar #include <stdint.h> tiva kütüphanesi #include "inc/tm4c123gh6pm.h" stellaris kütüphanesi #include "inc/lm4f120h5qr.h"
54 Gerekli Kütüphanelerin Eklenmesi (int8_t, int16_t, int32_t, uint8_t, uint16_t, uint32_t) tipindeki tamsayı değerlerinin kullanılmasını sağlar #include <stdint.h> tiva kütüphanesi #include "inc/tm4c123gh6pm.h" stellaris kütüphanesi #include "inc/lm4f120h5qr.h"
55 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
56 volatile (uçucu) degisken Degiskenin degerini donanım degistirebilir; int delay = 0; while(delay == 0);!!!!!!!!!!! Derleyici donanım sevyesine inmeden degiskeni kaldırır: Derleyicinin degiskene müdahil olmasını engellemek için; volatile int delay = 0; while(delay == 0);
57 volatile (uçucu) degisken Degiskenin degerini donanım degistirebilir; int delay = 0; while(delay == 0);!!!!!!!!!!! Derleyici donanım sevyesine inmeden degiskeni kaldırır: Derleyicinin degiskene müdahil olmasını engellemek için; volatile int delay = 0; while(delay == 0);
58 volatile (uçucu) degisken Degiskenin degerini donanım degistirebilir; int delay = 0; while(delay == 0);!!!!!!!!!!! Derleyici donanım sevyesine inmeden degiskeni kaldırır: Derleyicinin degiskene müdahil olmasını engellemek için; volatile int delay = 0; while(delay == 0);
59 volatile (uçucu) degisken Degiskenin degerini donanım degistirebilir; int delay = 0; while(delay == 0);!!!!!!!!!!! Derleyici donanım sevyesine inmeden degiskeni kaldırır: Derleyicinin degiskene müdahil olmasını engellemek için; volatile int delay = 0; while(delay == 0);
60 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
61 System Control Run Mod Clock Gate Control Register // Port F sayacını aktifleştirir SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; SYSCTL_RCGC2_R SYSCTL_RCGC2_GPIOD SYSCTL_RCGC2_R OR 1
62 System Control Run Mod Clock Gate Control Register Adres İsim $400F.E GPIOF GPIOE GPIOD GPIOC GPIOB GPIOA SYSCTL_RCGC2_R 0b b b b b b = = = = = = SYSCTL_RCGC2_R = 001; SYSCTL_RCGC2_R = 002; SYSCTL_RCGC2_R = 004; SYSCTL_RCGC2_R = 008; SYSCTL_RCGC2_R = 010; SYSCTL_RCGC2_R = 020; // Port A sayacını aktifleştirir // Port B sayacını aktifleştirir // Port C sayacını aktifleştirir // Port D sayacını aktifleştirir // Port E sayacını aktifleştirir // Port F sayacını aktifleştirir
63 System Control Run Mod Clock Gate Control Register Adres İsim $400F.E GPIOF GPIOE GPIOD GPIOC GPIOB GPIOA SYSCTL_RCGC2_R 0b b b b b b = = = = = = SYSCTL_RCGC2_R = 001; SYSCTL_RCGC2_R = 002; SYSCTL_RCGC2_R = 004; SYSCTL_RCGC2_R = 008; SYSCTL_RCGC2_R = 010; SYSCTL_RCGC2_R = 020; // Port A sayacını aktifleştirir // Port B sayacını aktifleştirir // Port C sayacını aktifleştirir // Port D sayacını aktifleştirir // Port E sayacını aktifleştirir // Port F sayacını aktifleştirir
64 System Control Run Mod Clock Gate Control Register // Port F sayacını aktifleştirir SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; SYSCTL_RCGC2_R SYSCTL_RCGC2_GPIOD SYSCTL_RCGC2_R OR 1
65 System Control Run Mod Clock Gate Control Register // Port F sayacını aktifleştirir SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; SYSCTL_RCGC2_R SYSCTL_RCGC2_GPIOF SYSCTL_RCGC2_R OR 1
66 System Control Run Mod Clock Gate Control Register // Port F sayacını aktifleştirir SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; SYSCTL_RCGC2_R SYSCTL_RCGC2_GPIOF SYSCTL_RCGC2_R OR 1
67 System Control Run Mod Clock Gate Control Register // Port F sayacını aktifleştirir SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; SYSCTL_RCGC2_R SYSCTL_RCGC2_GPIOF SYSCTL_RCGC2_R 1 OR
68 System Control Run Mod Clock Gate Control Register Adres İsim $400F.E GPIOF GPIOE GPIOD GPIOC GPIOB GPIOA SYSCTL_RCGC2_R SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOA; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOB; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOC; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOD; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOE; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; // Port A clock aktifleştirir // Port B clock aktifleştirir // Port C clock aktifleştirir // Port D clock aktifleştirir // Port E clock aktifleştirir // Port F clock aktifleştirir
69 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
70 Kartın üzerindeki ledi yakma // zaman gecirmek icin yukarida degistirilen saklayıcı okunur delay = SYSCTL_RCGC2_R;
71 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
72 Kartın üzerindeki ledi yakma Port F1 --> Kırmızı LED Port F2 --> Mavi LED Port F3 --> Yesil LED
73 Kartın üzerindeki ledi yakma GPIO_PORTF_DIR_R
74 Direction Register GPIO_PORTF_DIR_R = 0b ; // PF1 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF2 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF3 pinini cikis yap GPIO_PORTF_DIR_R OR GPIO_PORTF_DIR_R 1
75 Direction Register GPIO_PORTF_DIR_R = 0b ; // PF1 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF2 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF3 pinini cikis yap GPIO_PORTF_DIR_R OR GPIO_PORTF_DIR_R 1
76 Direction Register GPIO_PORTF_DIR_R = 0b ; // PF1 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF2 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF3 pinini cikis yap GPIO_PORTF_DIR_R OR GPIO_PORTF_DIR_R 1
77 Direction Register GPIO_PORTF_DIR_R = 0b ; // PF1 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF2 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF3 pinini cikis yap GPIO_PORTF_DIR_R OR GPIO_PORTF_DIR_R 1
78 Direction Register GPIO_PORTF_DIR_R
79 Direction Register GPIO_PORTF_DIR_R = 0b ; // PF1 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF2 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF3 pinini cikis yap
80 Direction Register GPIO_PORTF_DIR_R
81 Direction Register GPIO_PORTF_DIR_R = 0b ; // PF1 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF2 pinini cikis yap GPIO_PORTF_DIR_R = 0b ; // PF3 pinini cikis yap
82 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
83 Digital Enable Register GPIO_PORTF_DEN_R = 0b ; // PF2 pinini aktiflestir
84 Digital Enable Register GPIO_PORTF_DEN_R = 0b ; // PF2 pinini aktiflestir GPIO_PORTF_DEN_R

85 Digital Enable Register GPIO_PORTF_DEN_R = 0b ; // PF 3 pinini aktiflestir GPIO_PORTF_DEN_R
86 Digital Enable Register GPIO_PORTF_DEN_R = 0b ; // PF2 pinini aktiflestir GPIO_PORTF_DEN_R OR GPIO_PORTF_DEN_R 1
87 Digital Enable Register GPIO_PORTF_DEN_R = 0b ; // PF2 pinini aktiflestir GPIO_PORTF_DEN_R OR GPIO_PORTF_DEN_R 1
88 Digital Enable Register GPIO_PORTF_DEN_R = 0b ; // PF2 pinini aktiflestir GPIO_PORTF_DEN_R OR GPIO_PORTF_DEN_R 1
89 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
90 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
91 Data Register GPIO_PORTF_DATA_R
92 Data Register GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R
93 Data Register GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R GPIO_PORTF_DATA_R OR GPIO_PORTF_DATA_R
94 Data Register GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R GPIO_PORTF_DATA_R OR GPIO_PORTF_DATA_R
 /* bos dongu ile bekle")
95 Data Register GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */;
96 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }

97 Data Register GPIO_PORTF_DATA_R
98 Data Register GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R
99 Data Register GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R GPIO_PORTF_DATA_R AND GPIO_PORTF_DATA_R
100 Data Register GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R GPIO_PORTF_DATA_R AND GPIO_PORTF_DATA_R
101 Data Register GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */;
102 Kartın üzerindeki ledi yakma #include <stdint.h> #include "inc/tm4c123gh6pm.h" int main(void) { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOF; delay = SYSCTL_RCGC2_R; GPIO_PORTF_DIR_R = 0b ; GPIO_PORTF_DEN_R = 0b ; while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; } }
 /* bos dongu ile")

103 Data Register while(1) { GPIO_PORTF_DATA_R = 0b ; for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; GPIO_PORTF_DATA_R &= ~(0b ); for(delay = 0; delay < ; delay++) /* bos dongu ile bekle */; }



104 Sorular
Timer. Suhap SAHIN {\} /\
 Timer Suhap SAHIN 0 {\ /\ clock clock Phase-Lock-Loop (Faz-Kilit-Döngü) 400 MHz Faz-Kilit-Döngü ARM mikrodenetleyiciler Faz-Kilit-Döngüleri (PLL'ler) ile donatılmıstır. Tiva kartı, dahili bir 400 MHz PLL
Timer Suhap SAHIN 0 {\ /\ clock clock Phase-Lock-Loop (Faz-Kilit-Döngü) 400 MHz Faz-Kilit-Döngü ARM mikrodenetleyiciler Faz-Kilit-Döngüleri (PLL'ler) ile donatılmıstır. Tiva kartı, dahili bir 400 MHz PLL
Sistem Programlama Deney 1
 Sistem Programlama Deney 1 Deney başlamadan önce deney grubu listenizi aşağıdaki dokümana yazınız: https://docs.google.com/spreadsheets/d/1gxplmgkkfwlutcvn9_its7tt rcwuzkqfnwhlpfdodhw/edit?usp=sharing
Sistem Programlama Deney 1 Deney başlamadan önce deney grubu listenizi aşağıdaki dokümana yazınız: https://docs.google.com/spreadsheets/d/1gxplmgkkfwlutcvn9_its7tt rcwuzkqfnwhlpfdodhw/edit?usp=sharing
SysTick Kesmesi. Suhap SAHIN {\} /\
 SysTick Kesmesi Suhap SAHIN {\ /\ Mesgul Bekleme islem_1 islem_2 islem_3 islem_4 islem_5 Seven Segment Buton Led Seven Segment Buton Led Cortex M4 8 32k RAM GPIO Port B GPIO Port A 8 Eight UARTs Four I2Cs
SysTick Kesmesi Suhap SAHIN {\ /\ Mesgul Bekleme islem_1 islem_2 islem_3 islem_4 islem_5 Seven Segment Buton Led Seven Segment Buton Led Cortex M4 8 32k RAM GPIO Port B GPIO Port A 8 Eight UARTs Four I2Cs
Giris {\} /\ Suhap SAHIN
 Giris 0 {\} /\ Suhap SAHIN Kaynaklar http://users.ece.utexas.edu/~valvano/volume1/e-book/ Kaynaklar https://www.edx.org/course/embedded-systems-shape-world-utaustinx-ut-6-02x Konular 1. 2. 3. 4. 5. 6.
Giris 0 {\} /\ Suhap SAHIN Kaynaklar http://users.ece.utexas.edu/~valvano/volume1/e-book/ Kaynaklar https://www.edx.org/course/embedded-systems-shape-world-utaustinx-ut-6-02x Konular 1. 2. 3. 4. 5. 6.
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı EK-A IDE, Program Geliştirme Araçları Geliştirme Araçları Keil C51 Yazılımı Geliştirme Araçları ISIS Programı ISIS/Proteus programı:
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı EK-A IDE, Program Geliştirme Araçları Geliştirme Araçları Keil C51 Yazılımı Geliştirme Araçları ISIS Programı ISIS/Proteus programı:
446 GÖMÜLÜ SİSTEM TASARIMI. Lab 9 UART
 446 GÖMÜLÜ SİSTEM TASARIMI Lab 9 UART 9.1 Amaç Bu laboratuvarda LaunchPad ve bilgisayar arasında seri haberleşme gerçekleştirilecektir. Bunun için TExaSdisplay terminal programı kullanılacaktır. UART0
446 GÖMÜLÜ SİSTEM TASARIMI Lab 9 UART 9.1 Amaç Bu laboratuvarda LaunchPad ve bilgisayar arasında seri haberleşme gerçekleştirilecektir. Bunun için TExaSdisplay terminal programı kullanılacaktır. UART0
Melih Hilmi ULUDAĞ. Yazılım Mühendisi Mekatronik Mühendisi. a aittir.
 Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
STM32 ile Gömülü Yazılım Geliştirme - 1
 STM32 ile Gömülü Yazılım Geliştirme - 1 STM32F10X ile Gömülü Yazılım Geliştirme konusuna hızlı bir giriş yapacağız, gerekli donanımlar ve geliştirme ortamının kurulumu ile başlayıp, basit bir uygulama
STM32 ile Gömülü Yazılım Geliştirme - 1 STM32F10X ile Gömülü Yazılım Geliştirme konusuna hızlı bir giriş yapacağız, gerekli donanımlar ve geliştirme ortamının kurulumu ile başlayıp, basit bir uygulama
Örnek. int analogpin = 3; int val = 0; void setup() { Serial.begin(9600); } void loop() { val = analogread(analogpin); Serial.
 { Serial.begin(9600); } void loop() { val = analogread(analogpin); Serial.") Seri Port Ekranı Arduinoyu USB üzerinden bilgisayarımıza bağladığımızda aslında seri port bağlantısı yapmış oluyoruz. Bu seri port üzerinden hem bilgi alışverişi yapabilir hem de uç bağlantı noktasındaki,
Seri Port Ekranı Arduinoyu USB üzerinden bilgisayarımıza bağladığımızda aslında seri port bağlantısı yapmış oluyoruz. Bu seri port üzerinden hem bilgi alışverişi yapabilir hem de uç bağlantı noktasındaki,
Program Kodları. void main() { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }
 { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }") Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Örnek 1: Kara Şimsek (İki LED) Soru: MSP430 LaunchPad te buluna iki LED i birer saniye aralıklarla sırayla yakıp söndüren programı yazınız. Kara Şimsek
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Örnek 1: Kara Şimsek (İki LED) Soru: MSP430 LaunchPad te buluna iki LED i birer saniye aralıklarla sırayla yakıp söndüren programı yazınız. Kara Şimsek
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak
 LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
İÇİNDEKİLER. 3 STM32F4 MIKRO-DENETLEYICISI 23 STM32 Ailesi ve STM32F STM32 Ailesi 23 STM32 Mikrodenetleyicileri 30 Numaralandırılması 30
 VII 1 GİRİŞ 1 Gömülü Sistemler (Embedded Systems) 1 Kitap Hakkında 2 Kitap Kimler İçin? 2 Kitabı Takip Edebilmek İçin Gerekenler 3 Kitabın İçeriği ve Uygulamaları 4 2 ARM İŞLEMCISI VE MIKRO-DENETLEYICILER
VII 1 GİRİŞ 1 Gömülü Sistemler (Embedded Systems) 1 Kitap Hakkında 2 Kitap Kimler İçin? 2 Kitabı Takip Edebilmek İçin Gerekenler 3 Kitabın İçeriği ve Uygulamaları 4 2 ARM İŞLEMCISI VE MIKRO-DENETLEYICILER
KONTROL VE OTOMASYON KULÜBÜ
 KONTROL VE OTOMASYON KULÜBÜ C DİLİ İLE MİKROKONTROLÖR PROGRAMLAMA EĞİTİMİ Serhat Büyükçolak Ahmet Sakallı 2009-2010 Güz Dönemi Eğitimleri Mikrokontrolör Gömülü sistemlerin bir alt dalı olan mikrokontrolör
KONTROL VE OTOMASYON KULÜBÜ C DİLİ İLE MİKROKONTROLÖR PROGRAMLAMA EĞİTİMİ Serhat Büyükçolak Ahmet Sakallı 2009-2010 Güz Dönemi Eğitimleri Mikrokontrolör Gömülü sistemlerin bir alt dalı olan mikrokontrolör
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
void setup() fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.
 fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.") ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI
 AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
DENEY-1. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-1 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY-1-1: BİT YÖNLENDİRMELİ KOMUTLAR İLE PİNLERE DEĞER GÖNDERME AMAÇ: Mikrodenetleyici pinlerine
DENEY-1 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY-1-1: BİT YÖNLENDİRMELİ KOMUTLAR İLE PİNLERE DEĞER GÖNDERME AMAÇ: Mikrodenetleyici pinlerine
Mikroişlemciler. Microchip PIC
 Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
ARDUINO NEXTION UYGULAMASI. Bu makale, Arduino UNO kartı ile Nextion HMI ekranlarının nasıl kontrol edildiğini anlatmaktadır.
 1 Bu makale, Arduino UNO kartı ile Nextion HMI ekranlarının nasıl kontrol edildiğini anlatmaktadır. Uygulama, Arduino UNO kartına bir analog giriş olarak uygulanan potansiyometredeki değişimi Nextion HMI
1 Bu makale, Arduino UNO kartı ile Nextion HMI ekranlarının nasıl kontrol edildiğini anlatmaktadır. Uygulama, Arduino UNO kartına bir analog giriş olarak uygulanan potansiyometredeki değişimi Nextion HMI
Code Composer Studio İndirilmesi ve Kurulması
 BÖLÜM 2: 2.1. STELARIS KART GENEL BİLGİ VE CODE COMPOSER STUDIO: Code Composer Studio İndirilmesi ve Kurulması 1. Aşağıdaki linkten Code Composer Studio yu indirebilirsiniz: http://processors.wiki.ti.com/index.php/download_ccs
BÖLÜM 2: 2.1. STELARIS KART GENEL BİLGİ VE CODE COMPOSER STUDIO: Code Composer Studio İndirilmesi ve Kurulması 1. Aşağıdaki linkten Code Composer Studio yu indirebilirsiniz: http://processors.wiki.ti.com/index.php/download_ccs
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Deney 2. Kesme Uygulamaları
 Deney 2 Kesme Uygulamaları Deneyin Amacı Kesme kavramının öğretilmesi Kesme, kesme isteği ve yazılım kesmesi kavramlarının anlaşılması Kesme hizmet programı geliştirme Titreşimsiz düğme kavramının irdelenmesi
Deney 2 Kesme Uygulamaları Deneyin Amacı Kesme kavramının öğretilmesi Kesme, kesme isteği ve yazılım kesmesi kavramlarının anlaşılması Kesme hizmet programı geliştirme Titreşimsiz düğme kavramının irdelenmesi
BQ370-02 Modbus Analog Giriş Kartı 6 Kanal 4 20mA. Kullanım Kılavuzu. Doküman Versiyon: 1.0 03.05.2016 BQTEK
 Modbus Analog Giriş Kartı 6 Kanal 4 20mA Kullanım Kılavuzu Doküman Versiyon: 1.0 03.05.2016 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 3 1. Genel Görünüm... 4 2. Cihaz
Modbus Analog Giriş Kartı 6 Kanal 4 20mA Kullanım Kılavuzu Doküman Versiyon: 1.0 03.05.2016 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 3 1. Genel Görünüm... 4 2. Cihaz
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 1 Embedded C, C51 Temel Veri Tipleri Veri tipi (Data Type) Bit Bayt Değer bit 1 0, 1 char 8 1-128, +127 unsigned char 8 1 0,
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 1 Embedded C, C51 Temel Veri Tipleri Veri tipi (Data Type) Bit Bayt Değer bit 1 0, 1 char 8 1-128, +127 unsigned char 8 1 0,
İşletim Sistemlerine Giriş
 İşletim Sistemlerine Giriş İşletim Sistemleri ve Donanım İşletim Sistemlerine Giriş/ Ders01 1 İşletim Sistemi? Yazılım olmadan bir bilgisayar METAL yığınıdır. Yazılım bilgiyi saklayabilir, işleyebilir
İşletim Sistemlerine Giriş İşletim Sistemleri ve Donanım İşletim Sistemlerine Giriş/ Ders01 1 İşletim Sistemi? Yazılım olmadan bir bilgisayar METAL yığınıdır. Yazılım bilgiyi saklayabilir, işleyebilir
1. Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
DENEY-7. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-7 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ Doğada bulunan tüm sistemler analog düzendedir.
DENEY-7 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ MİKRODENETLEYİCİLERDE ANALOG DİJİTAL DÖNÜŞTÜRÜCÜ Doğada bulunan tüm sistemler analog düzendedir.
Adım Motoru: açıya adım. Şekil 8.2 tekyönlü. Lab 8. Siyah (A) Mavi ( B ) Kırmızı (B)
 Mavi ( B ) Kırmızı (B)") 446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
IOT UYGULAMALARINA GİRİŞ
 Bölüm 6 IOT UYGULAMALARINA GİRİŞ Devre geliştirme kartları, üzerlerinde bulunan portlar yardımıyla, elektronik sistemlerle analog ve dijital değerleri okuyarak ya da değer göndererek haberleşir ve bu cihazları
Bölüm 6 IOT UYGULAMALARINA GİRİŞ Devre geliştirme kartları, üzerlerinde bulunan portlar yardımıyla, elektronik sistemlerle analog ve dijital değerleri okuyarak ya da değer göndererek haberleşir ve bu cihazları
BQ Modbus Analog Giriş Kartı 6 Kanal PT100 - PT1000. Kullanım Kılavuzu. Doküman Versiyon: BQTEK
 Modbus Analog Giriş Kartı 6 Kanal PT100 - PT1000 Kullanım Kılavuzu Doküman Versiyon: 1.0 22.04.2016 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 3 1. Genel Görünüm...
Modbus Analog Giriş Kartı 6 Kanal PT100 - PT1000 Kullanım Kılavuzu Doküman Versiyon: 1.0 22.04.2016 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 3 1. Genel Görünüm...
V Daq Kurulum adımları
 V Daq Kurulum adımları 1. Kurulum dosyasının indirilmesi 2. Kurulum işlemleri 3. Seri port ayarlamaları 4. Kurulum klasörünün Matlab yoluna eklenmesi 5. Kurulu değil ise real time çekirdeğinin kurulması
V Daq Kurulum adımları 1. Kurulum dosyasının indirilmesi 2. Kurulum işlemleri 3. Seri port ayarlamaları 4. Kurulum klasörünün Matlab yoluna eklenmesi 5. Kurulu değil ise real time çekirdeğinin kurulması
idea rsbasic KOMUTLARI
 idea KOMUTLARI İÇİNDEKİLER 2.1 Etiketler (Labels)... 4 2.2 Yorumlar (Comments)... 5 2.3 Semboller (Symbols)... 6 2.4 backward (geri)... 7 2.5 debug (hata ayıkla/izle)... 8 2.6 dec (azalt)... 9 2.7 do..
idea KOMUTLARI İÇİNDEKİLER 2.1 Etiketler (Labels)... 4 2.2 Yorumlar (Comments)... 5 2.3 Semboller (Symbols)... 6 2.4 backward (geri)... 7 2.5 debug (hata ayıkla/izle)... 8 2.6 dec (azalt)... 9 2.7 do..
Değişkenler tanımlanırken onlara ne tür veriler atanabileceği de belirtilir. Temel veri türleri oldukça azdır:
 C VERİ TÜRLERİ BASİT VERİ TÜRLERİ Değişkenler, program içinde üzerinde işlem yapılan, veri saklanan ve durumlarına göre programın akışı sağlanan nesnelerdir. C de bir değişken kullanılmadan önce tanımlanmalıdır.
C VERİ TÜRLERİ BASİT VERİ TÜRLERİ Değişkenler, program içinde üzerinde işlem yapılan, veri saklanan ve durumlarına göre programın akışı sağlanan nesnelerdir. C de bir değişken kullanılmadan önce tanımlanmalıdır.
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK SİSTEMLER LABORATUVARI 1 ARDUINO DİJİTAL GİRİŞ-ÇIKIŞ KONTROLÜ DENEY SORUMLUSU Arş. Gör. Burak ULU ŞUBAT 2015 KAYSERİ
Haftalık Ders Saati Okul Eğitimi Süresi
 DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUARI MİKROİŞLEMCİLİ A/D DÖNÜŞTÜRÜCÜ
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUARI MİKROİŞLEMCİLİ A/D DÖNÜŞTÜRÜCÜ 1. Giriş Analog işaretler analog donanım kullanılarak işlenebilir. Ama analog
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUARI MİKROİŞLEMCİLİ A/D DÖNÜŞTÜRÜCÜ 1. Giriş Analog işaretler analog donanım kullanılarak işlenebilir. Ama analog
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek
 Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Mikroişlemci Nedir? Mikrodenetleyici Nedir? Mikroişlemci iç yapısı Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
Genel Kavramlar. Bilecik Şeyh Edebali Üniversitesi Gömülü Sistemler Ders Notları-2
 Genel Kavramlar Bilecik Şeyh Edebali Üniversitesi Gömülü Sistemler Ders Notları-2 ADC : Analog/Digital Converter ARM : Acorn RISC Machine CLK : Clock CPU : Central Processing Unit DAC : Digital / Analog
Genel Kavramlar Bilecik Şeyh Edebali Üniversitesi Gömülü Sistemler Ders Notları-2 ADC : Analog/Digital Converter ARM : Acorn RISC Machine CLK : Clock CPU : Central Processing Unit DAC : Digital / Analog
Programlama Dilleri. C Dili. Programlama Dilleri-ders02/ 1
 Programlama Dilleri C Dili Programlama Dilleri-ders02/ 1 Değişkenler, Sabitler ve Operatörler Değişkenler (variables) bellekte bilginin saklandığı gözlere verilen simgesel isimlerdir. Sabitler (constants)
Programlama Dilleri C Dili Programlama Dilleri-ders02/ 1 Değişkenler, Sabitler ve Operatörler Değişkenler (variables) bellekte bilginin saklandığı gözlere verilen simgesel isimlerdir. Sabitler (constants)
XILINX PROGRAMI İLE PROJE HAZIRLANMASI İÇİNDEKİLER
 XILINX PROGRAMI İLE PROJE HAZIRLANMASI İÇİNDEKİLER PROJE OLUŞTURMA ŞEMATİK DOSYASI OLUŞTURULMASI VERILOG DOSYASI OLUŞTURULMASI TEST DOSYASI OLUŞTURULMASI XILINX ISE SIMULATOR İLE BENZETİM YAPILMASI PİN
XILINX PROGRAMI İLE PROJE HAZIRLANMASI İÇİNDEKİLER PROJE OLUŞTURMA ŞEMATİK DOSYASI OLUŞTURULMASI VERILOG DOSYASI OLUŞTURULMASI TEST DOSYASI OLUŞTURULMASI XILINX ISE SIMULATOR İLE BENZETİM YAPILMASI PİN
LCD (Liquid Crystal Display )
") LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
B02.6 Karar Verme, Eşitlik ve Bağıntı Operatörleri
 B02.6 Karar Verme, Eşitlik ve Bağıntı Operatörleri 49 Yrd. Doç. Dr. Yakup EMÜL, Bilgisayar Programlama Ders Notları (B02) Çalıştırılabilir C ifadeleri ya bir işlem gerçekleştirir ( girilen verilerin toplanması
B02.6 Karar Verme, Eşitlik ve Bağıntı Operatörleri 49 Yrd. Doç. Dr. Yakup EMÜL, Bilgisayar Programlama Ders Notları (B02) Çalıştırılabilir C ifadeleri ya bir işlem gerçekleştirir ( girilen verilerin toplanması
VTIY DERS-4 YARDIMCI NOTLARI -2018
 VTIY DERS-4 YARDIMCI NOTLARI -2018 Matlab Arduino haberleşmesi için 2. yöntem seri haberleşmedir. İlk yöntemde Arduino üzerinden kod yazmaya gerek yoktu ancak bu yöntemde Arduino IDE üzerinden kod yazmamız
VTIY DERS-4 YARDIMCI NOTLARI -2018 Matlab Arduino haberleşmesi için 2. yöntem seri haberleşmedir. İlk yöntemde Arduino üzerinden kod yazmaya gerek yoktu ancak bu yöntemde Arduino IDE üzerinden kod yazmamız
LED YAKMAK. Circuit 2. Kablo LED. Direnç. Arduino LED. Direnç (330ohm)
") Circuit 2 Pin 13 Arduino LED (Light Emitting Diode) 1 LED YAKMAK LED 'ler (light-emitting diodes) bir çok elektronik devrede kullanılan güçlü ışık kaynaklarıdır. Çalışmalarımıza ilk olarak her elektronik
Circuit 2 Pin 13 Arduino LED (Light Emitting Diode) 1 LED YAKMAK LED 'ler (light-emitting diodes) bir çok elektronik devrede kullanılan güçlü ışık kaynaklarıdır. Çalışmalarımıza ilk olarak her elektronik
Birol Çapa Özen Özkaya. 2008-2009 Güz Dönemi Eğitimleri
 Birol Çapa Özen Özkaya 2008-2009 Güz Dönemi Eğitimleri Gömülü sistemlerin bir alt dalı olan mikrokontrolör tabanlı sistemler öncelikle çok geniş kullanım alanına sahiptir. Doğru elektronik donanımlarla
Birol Çapa Özen Özkaya 2008-2009 Güz Dönemi Eğitimleri Gömülü sistemlerin bir alt dalı olan mikrokontrolör tabanlı sistemler öncelikle çok geniş kullanım alanına sahiptir. Doğru elektronik donanımlarla
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
Dr. Fatih AY Tel: 0 388 225 22 55 [email protected] www.fatihay.net
 Bilgisayar Programlama Ders 6 Dr. Fatih AY Tel: 0 388 225 22 55 [email protected] www.fatihay.net Fonksiyon Prototipleri Fonksiyon Prototipleri Derleyici, fonksiyonların ilk hallerini (prototiplerini)
Bilgisayar Programlama Ders 6 Dr. Fatih AY Tel: 0 388 225 22 55 [email protected] www.fatihay.net Fonksiyon Prototipleri Fonksiyon Prototipleri Derleyici, fonksiyonların ilk hallerini (prototiplerini)
BM-311 Bilgisayar Mimarisi
 1 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar)
1 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar)
BQ351 Modbus Röle Kontrol Ünitesi. Kullanım Kılavuzu. Doküman Versiyon: BQTEK
 Modbus Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.0 08.12.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı
Modbus Röle Kontrol Ünitesi Kullanım Kılavuzu Doküman Versiyon: 1.0 08.12.2015 BQTEK İçindekiler İçindekiler... 2 1. Cihaz Özellikleri... 3 2. Genel Bilgi... 4 2.1. Genel Görünüm... 4 2.2 Cihaz Bağlantı
Sanal Bellek (Virtual Memory)
") Sanal Bellek (Virtual Memory) Bellek yönetim tekniklerinde belleğin zaman içinde parçalanması ve işlemlerin boyutunun fiziksel belleğin boyutuyla sınırlı olması sorunları vardır. Ana belleğin yetersiz
Sanal Bellek (Virtual Memory) Bellek yönetim tekniklerinde belleğin zaman içinde parçalanması ve işlemlerin boyutunun fiziksel belleğin boyutuyla sınırlı olması sorunları vardır. Ana belleğin yetersiz
DENEY-5. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-5 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 MİKRODENETLEYİCİDE KESME BİRİMİ Mikrodenetleyicinin değişik kaynaklardan gelen uyarıcı sinyaller
DENEY-5 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 MİKRODENETLEYİCİDE KESME BİRİMİ Mikrodenetleyicinin değişik kaynaklardan gelen uyarıcı sinyaller
BQ353 Modbus 8x D.Input 8x Röle Cihazı Kullanım Kılavuzu
 BQ353 Modbus 8x D.Input 8x Röle Cihazı Döküman Ver: 1.0.0 İçindekiler 1. BQ353 Hakkında 3 2. Cihaz Özellikleri 3 3. Cihaz Görünümü 4 3.1. Besleme Girişi 5 3.2. RS485 Port 5 3.3. Power Led 5 3.4. Address
BQ353 Modbus 8x D.Input 8x Röle Cihazı Döküman Ver: 1.0.0 İçindekiler 1. BQ353 Hakkında 3 2. Cihaz Özellikleri 3 3. Cihaz Görünümü 4 3.1. Besleme Girişi 5 3.2. RS485 Port 5 3.3. Power Led 5 3.4. Address
İÇİNDEKİLER VII İÇİNDEKİLER 1 ARDUINONUN TEMELLERİ 1
 İÇİNDEKİLER VII İÇİNDEKİLER 1 ARDUINONUN TEMELLERİ 1 Mikrodenetleyiciler ve Arduino 2 Mikrodenetleyiciler 2 Atmel AVR Mikrodenetleyicileri 3 Avr ve RISC Mimarisi 4 Neden Arduino? 5 Arduino Geliştirme Ortamı
İÇİNDEKİLER VII İÇİNDEKİLER 1 ARDUINONUN TEMELLERİ 1 Mikrodenetleyiciler ve Arduino 2 Mikrodenetleyiciler 2 Atmel AVR Mikrodenetleyicileri 3 Avr ve RISC Mimarisi 4 Neden Arduino? 5 Arduino Geliştirme Ortamı
ARDUINO PROGRAMLAMA. Yrd.Doç.Dr. Bülent ÇOBANOĞLU
 ARDUINO PROGRAMLAMA Yrd.Doç.Dr. Bülent ÇOBANOĞLU Arduino Nedir?http://arduino.cc/ Açık kaynaklı fiziksel programlama platformu Programlama dili : Processing / Wiring dili Arduino, açık kaynak kodlu yazılım
ARDUINO PROGRAMLAMA Yrd.Doç.Dr. Bülent ÇOBANOĞLU Arduino Nedir?http://arduino.cc/ Açık kaynaklı fiziksel programlama platformu Programlama dili : Processing / Wiring dili Arduino, açık kaynak kodlu yazılım
ARM mimari ailesi [1]
![ARM mimari ailesi [1]](/thumbs/24/2828191.jpg "ARM mimari ailesi [1]") 1- ARM Mimarisi İşlemci tasarımları 2 farklı mimaride dizayn edilir. Bunlar CISC (complex instruction set computer) ve RISC (reduced instruction set computer) mimarileridir. CISC mimarisi programlanmasının
1- ARM Mimarisi İşlemci tasarımları 2 farklı mimaride dizayn edilir. Bunlar CISC (complex instruction set computer) ve RISC (reduced instruction set computer) mimarileridir. CISC mimarisi programlanmasının
PIC16F84 VE PIC C LITE COMPILER. Giriş / Çıkış port sayısı. Capture / Comp / PWM
 PIC 16F877 VE PIC C LITE COMPILER ÖZELLİKLER Çalışma hızı Program Belleği EEPROM Belleği Kullanıcı RAM Giriş / Çıkış port sayısı Timer A / D çevirici Capture / Comp / PWM Seri çevresel arayüz Paralel slave
PIC 16F877 VE PIC C LITE COMPILER ÖZELLİKLER Çalışma hızı Program Belleği EEPROM Belleği Kullanıcı RAM Giriş / Çıkış port sayısı Timer A / D çevirici Capture / Comp / PWM Seri çevresel arayüz Paralel slave
BM-311 Bilgisayar Mimarisi. Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü
 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar) Bus
BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar) Bus
idea Kontrol Kartı (idea Board jv2.1) Kullanım Kılavuzu
 Kullanım Kılavuzu") idea Kontrol Kartı (idea Board j) Kullanım Kılavuzu 1 Genel Bakış idea (Board) Kontrol Kartı robotbilim ve mekatronik uygulamalar geliştirmek için sizlere yeni bir dünyanın kapılarını aralıyor! Bu kontrol
idea Kontrol Kartı (idea Board j) Kullanım Kılavuzu 1 Genel Bakış idea (Board) Kontrol Kartı robotbilim ve mekatronik uygulamalar geliştirmek için sizlere yeni bir dünyanın kapılarını aralıyor! Bu kontrol
ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI:
 ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI: Aduc841 geliştirme kartının genel görüntüsü aşağıda verilmiştir; RS232 ANALOG USB ÇIKIŞ ANALOG GİRİŞ POTLAR TEXT LCD EKRAN GÜÇ KAYNAĞI LEDLER
ADUC841 MİKRODENETLEYİCİ TABANLI GELİŞTİRME KARTININ TANITIMI: Aduc841 geliştirme kartının genel görüntüsü aşağıda verilmiştir; RS232 ANALOG USB ÇIKIŞ ANALOG GİRİŞ POTLAR TEXT LCD EKRAN GÜÇ KAYNAĞI LEDLER
BÖLÜM 6 Seri Port Đşlemleri
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 6 Seri Port Đşlemleri Amaçlar Seri haberleşmenin önemini kavramak 8051 seri port kontrol saklayıcılarını öğrenmek Seri port çalışma modları hakkında bilgi
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 6 Seri Port Đşlemleri Amaçlar Seri haberleşmenin önemini kavramak 8051 seri port kontrol saklayıcılarını öğrenmek Seri port çalışma modları hakkında bilgi
BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI PİC PROGRAMLAMA İLE BASİT UÇAK OYUNU MEHMET HALİT İNAN BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BAHAR 2014 KARADENİZ TEKNİK ÜNİVERSİTESİ
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ TASARIM PROJESİ ÇALIŞMASI PİC PROGRAMLAMA İLE BASİT UÇAK OYUNU MEHMET HALİT İNAN BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ BAHAR 2014 KARADENİZ TEKNİK ÜNİVERSİTESİ
3500 Kırmızı 1210 SMD İç Mekan Mt/ 60 LED 120 Derece Mt/400 ma Mt/4.8 Watt 1 USD
 3500 Kırmızı 1210 SMD İç Mekan Mt/ 60 LED 120 Derece Mt/400 ma Mt/4.8 Watt 1 USD 3501 Sarı 1210 SMD İç Mekan Mt/ 60 LED 120 Derece Mt/400 ma Mt/4.8 Watt 1 USD 3502 Mavi 1210 SMD İç Mekan Mt/ 60 LED 120
3500 Kırmızı 1210 SMD İç Mekan Mt/ 60 LED 120 Derece Mt/400 ma Mt/4.8 Watt 1 USD 3501 Sarı 1210 SMD İç Mekan Mt/ 60 LED 120 Derece Mt/400 ma Mt/4.8 Watt 1 USD 3502 Mavi 1210 SMD İç Mekan Mt/ 60 LED 120
İletişim Protokolleri (Communication Protocols)
") İletişim Protokolleri (Communication Protocols) Arduino dış dünya ile iletişim kurabilmek için genel amaçlı i/o pinleri önceki konu başlığında incelenmişti. LED, buton, role vb. cihazlardan girdi almak
İletişim Protokolleri (Communication Protocols) Arduino dış dünya ile iletişim kurabilmek için genel amaçlı i/o pinleri önceki konu başlığında incelenmişti. LED, buton, role vb. cihazlardan girdi almak
BBS 514 YAPISAL PROGRAMLAMA (STRUCTURED PROGRAMMING)
") 1 BBS 514 YAPISAL PROGRAMLAMA (STRUCTURED PROGRAMMING) LECTURE 3: ASSIGNMENT OPERATOR Lecturer: Burcu Can BBS 514 - Yapısal Programlama (Structured Programming) 2 Lexical Elements (Sözcüksel Elemanlar)
1 BBS 514 YAPISAL PROGRAMLAMA (STRUCTURED PROGRAMMING) LECTURE 3: ASSIGNMENT OPERATOR Lecturer: Burcu Can BBS 514 - Yapısal Programlama (Structured Programming) 2 Lexical Elements (Sözcüksel Elemanlar)
2019
 Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
Uygulama Kitapçığı www.toybotmaker.com 2019 TOYBOT PORT YAPISI Pin Numarası Fonksiyon 3, 5, 6 ve 9 PWM 4 Buzzer 7 Kırmızı LED 8 Sarı LED 10 Servo motor 11 Yeşil LED 12 ve 13 Mesafe sensörü 1) TOYBOT İLE
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ 1 Mikrodenetleyici Anatomisi Çevre Birimler (Peripherals) Timers Watchdog Timer Program sonsuz döngüye girdiğinde işlemciyi resetler İletişim Arayüzleri
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ 1 Mikrodenetleyici Anatomisi Çevre Birimler (Peripherals) Timers Watchdog Timer Program sonsuz döngüye girdiğinde işlemciyi resetler İletişim Arayüzleri
Adres Yolu (Address Bus) Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması
 Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması") MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
Elif İLİKSİZ. Keziban TURAN. Radio Frekanslarla Hareket Eden Araç
 Elif İLİKSİZ Keziban TURAN Radio Frekanslarla Hareket Eden Araç Mayıs 2016 İÇİNDEKİLER ALICI ALICI MEKANİZMASI VERİCİ MEKANİZMASI MALZEMELER MEKANİK KISIM ELEKTRONİK KISIM YAZILIM Robotumuzun adı: Radio
Elif İLİKSİZ Keziban TURAN Radio Frekanslarla Hareket Eden Araç Mayıs 2016 İÇİNDEKİLER ALICI ALICI MEKANİZMASI VERİCİ MEKANİZMASI MALZEMELER MEKANİK KISIM ELEKTRONİK KISIM YAZILIM Robotumuzun adı: Radio
EEM 419-Mikroişlemciler Güz 2017
 EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Alt Program Yapısı Alt programın çağrılması Alt program korunur alınır ;Argumanlar R12 R15 registerlarına atanir. call #SubroutineLabel SubroutineLabel:
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Alt Program Yapısı Alt programın çağrılması Alt program korunur alınır ;Argumanlar R12 R15 registerlarına atanir. call #SubroutineLabel SubroutineLabel:
RTU300 SERİSİ DONANIM KILAVUZU
 RTU300 SERİSİ DONANIM KILAVUZU RTU310/RTU320/RTU330/RTU340/RTU350 RTU Serisi 07 / 2017 MIKRODEV_HM_RTU300 İÇİNDEKİLER ŞEKİL LİSTESİ... 2 Önsöz... 3 Mikrodev i Tanıyalım... 4 UYARI!... 5 1 RTU300 GENEL
RTU300 SERİSİ DONANIM KILAVUZU RTU310/RTU320/RTU330/RTU340/RTU350 RTU Serisi 07 / 2017 MIKRODEV_HM_RTU300 İÇİNDEKİLER ŞEKİL LİSTESİ... 2 Önsöz... 3 Mikrodev i Tanıyalım... 4 UYARI!... 5 1 RTU300 GENEL
MP211 DONANIM KILAVUZU
 MP211 DONANIM KILAVUZU MP211 PLC Serisi 06 / 2017 MIKRODEV_HM_MP211 İÇİNDEKİLER ŞEKİL LİSTESİ... 2 Önsöz... 3 Mikrodev i Tanıyalım... 4 UYARI!... 5 1 MP211 GENEL BİLGİLER... 6 1.1 FİZİKSEL ARAYÜZLER...
MP211 DONANIM KILAVUZU MP211 PLC Serisi 06 / 2017 MIKRODEV_HM_MP211 İÇİNDEKİLER ŞEKİL LİSTESİ... 2 Önsöz... 3 Mikrodev i Tanıyalım... 4 UYARI!... 5 1 MP211 GENEL BİLGİLER... 6 1.1 FİZİKSEL ARAYÜZLER...
FPGA İLE UYGULAMA ÖRNEKLERİ
 FPGA ile Display Kontrol ve (0-9999) Sayıcı Uygulaması 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda deneme kartımız üzerinde bulunan 8 adet (4x2 display
FPGA ile Display Kontrol ve (0-9999) Sayıcı Uygulaması 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda deneme kartımız üzerinde bulunan 8 adet (4x2 display
Proje Konusu. 108 kademeli Analog Ampermetre yapımı (malzemeler: Galvanometre, direnç)
") Grup No 101 YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRİK DEVRE TEMELLERİ LABORATUVARI PROJELERİ Proje Konusu Birinci kademesinde 0-1 VDC, ikinci kademesinde 1-2 VDC aralığını
Grup No 101 YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ELEKTRİK DEVRE TEMELLERİ LABORATUVARI PROJELERİ Proje Konusu Birinci kademesinde 0-1 VDC, ikinci kademesinde 1-2 VDC aralığını
SAYFA : 2 / 9 VERSİYON GEÇMİŞİ VERSİYON TARİH AMAÇ AÇIKLAMA V V
 KULLANICI DÖKÜMANI Modbus-RTU Haberleşmeli Kompakt Sensör / LED İndikatör SAYFA : 1 / 9 VERSİYON GEÇMİŞİ VERSİYON TARİH AMAÇ AÇIKLAMA V1.03 17.12.2017 V1.02 07.07.2017 V1.01 03.04.2017 YAZILIMSAL YENİLİK
KULLANICI DÖKÜMANI Modbus-RTU Haberleşmeli Kompakt Sensör / LED İndikatör SAYFA : 1 / 9 VERSİYON GEÇMİŞİ VERSİYON TARİH AMAÇ AÇIKLAMA V1.03 17.12.2017 V1.02 07.07.2017 V1.01 03.04.2017 YAZILIMSAL YENİLİK
1- KULLANILACAK DEVRE ELEMANLARININ TANITILMASI
 1- KULLANILACAK DEVRE ELEMANLARININ TANITILMASI ARDUINO UNO Arduino, kolaylıkla devreler tasarlayabileceğiniz, açık kaynak kodlu bir geliştirme platformudur. Arduino kullanmak için üst düzey bir elektronik
1- KULLANILACAK DEVRE ELEMANLARININ TANITILMASI ARDUINO UNO Arduino, kolaylıkla devreler tasarlayabileceğiniz, açık kaynak kodlu bir geliştirme platformudur. Arduino kullanmak için üst düzey bir elektronik
ĐŞARET ĐŞLEME (SIGNAL PROCESSING)
") ĐŞARET ĐŞLEME (SIGNAL PROCESSING) Modern ölçme sistemlerinde Đşaret Đşleme bloğunun yerini çoğunlukla bir PC almıştır. Söz konusu bloğun en önemli fonksiyonu, ölçülen fiziksel büyüklük elektriksel işarete
ĐŞARET ĐŞLEME (SIGNAL PROCESSING) Modern ölçme sistemlerinde Đşaret Đşleme bloğunun yerini çoğunlukla bir PC almıştır. Söz konusu bloğun en önemli fonksiyonu, ölçülen fiziksel büyüklük elektriksel işarete
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI
 SİNYAL KONTROL UYGULAMASI") DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
DENEY-6. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-6 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 TEXT LCD İLE VERİ GÖRÜNTÜLEME Mikrodenetleyicilerle bir sistem tasarlarken çoğu kez kullanılan
DENEY-6 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 TEXT LCD İLE VERİ GÖRÜNTÜLEME Mikrodenetleyicilerle bir sistem tasarlarken çoğu kez kullanılan
IOT DONANIM ALT YAPISI
 Bölüm 2 IOT DONANIM ALT YAPISI IOT ekosistemi içerisinde pek çok donanım bileşeni kullanılmaktadır. Temel yapıyı devre geliştirme kartları teşkil etmektedir. IOT ekosistemi içerisinde Arduino, Raspberry
Bölüm 2 IOT DONANIM ALT YAPISI IOT ekosistemi içerisinde pek çok donanım bileşeni kullanılmaktadır. Temel yapıyı devre geliştirme kartları teşkil etmektedir. IOT ekosistemi içerisinde Arduino, Raspberry
BİLGİSAYAR BİLİMİ DERSİ (KUR-2)
") BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
LPC1769 ile 8 Temel Uygulama
 LPC1769 ile 8 Temel Uygulama Bu uygulama notunun amacı, temel seviyede gömülü sistem bilgisi olan arkadaşlara 32 bit ARM Cortex-M3 tabanlı NXP firmasına ait olan LPC1769 hakkında bilgi vermek, temel seviyede
LPC1769 ile 8 Temel Uygulama Bu uygulama notunun amacı, temel seviyede gömülü sistem bilgisi olan arkadaşlara 32 bit ARM Cortex-M3 tabanlı NXP firmasına ait olan LPC1769 hakkında bilgi vermek, temel seviyede
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI KESMELİ GİRİŞ/ÇIKIŞ
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI KESMELİ GİRİŞ/ÇIKIŞ 8259 PIC (Programmable Interrupt Controller) ve 8086 CPU tümleşik devrelerin sinyal akışı
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI KESMELİ GİRİŞ/ÇIKIŞ 8259 PIC (Programmable Interrupt Controller) ve 8086 CPU tümleşik devrelerin sinyal akışı
UniGSM Arduino SHIELD (UniGSM-A) KURULUM ve KULLANIM KİTAPÇIĞI
 KURULUM ve KULLANIM KİTAPÇIĞI") UniGSM Arduino SHIELD (UniGSM-A) KURULUM ve KULLANIM KİTAPÇIĞI UniGSM KARTI UniGSM GSM/GPRS kartı, hem Arduino kartlarına hem Raspberry kartlarına hem de bağımsız olarak (Stand alone) kullanılabilen bir
UniGSM Arduino SHIELD (UniGSM-A) KURULUM ve KULLANIM KİTAPÇIĞI UniGSM KARTI UniGSM GSM/GPRS kartı, hem Arduino kartlarına hem Raspberry kartlarına hem de bağımsız olarak (Stand alone) kullanılabilen bir
LMS PC aracı ACS420. LMS parametre ayarlarının yapılması için PC yazılımı. Kurlum ve çalıştırma talimatları
 LMS PC aracı ACS420 LMS parametre ayarlarının yapılması için PC yazılımı Kurlum ve çalıştırma talimatları 1 İçindekiler 1. ACS420 programının kurulumu.. 3 2. OCI430 ara yüzün sürücü kurulumu.. 7 OCI430
LMS PC aracı ACS420 LMS parametre ayarlarının yapılması için PC yazılımı Kurlum ve çalıştırma talimatları 1 İçindekiler 1. ACS420 programının kurulumu.. 3 2. OCI430 ara yüzün sürücü kurulumu.. 7 OCI430
Bölüm 9 A/D Çeviriciler
 Bölüm 9 A/D Çeviriciler 9.1 AMAÇ 1. Bir Analog-Dijital Çeviricinin çalışma yönteminin anlaşılması. 2. ADC0804 ve ADC0809 entegrelerinin karakteristiklerinin anlaşılması. 3. ADC0804 ve ADC0809 entegrelerinin
Bölüm 9 A/D Çeviriciler 9.1 AMAÇ 1. Bir Analog-Dijital Çeviricinin çalışma yönteminin anlaşılması. 2. ADC0804 ve ADC0809 entegrelerinin karakteristiklerinin anlaşılması. 3. ADC0804 ve ADC0809 entegrelerinin
ROKAY. Robot Operatör Kayıt Cihazı KULLANMA KILAVUZU V:1.0
 ROKAY Robot Operatör Kayıt Cihazı KULLANMA KILAVUZU V:1.0 1 İÇİNDEKİLER SAYFA Cihazın Genel Özellikleri... 3 Programın Kurulumu... 4 Windows-7 Sürücülerin Yüklenmesi... 5 Windows-Vista Sürücülerin Yüklenmesi...
ROKAY Robot Operatör Kayıt Cihazı KULLANMA KILAVUZU V:1.0 1 İÇİNDEKİLER SAYFA Cihazın Genel Özellikleri... 3 Programın Kurulumu... 4 Windows-7 Sürücülerin Yüklenmesi... 5 Windows-Vista Sürücülerin Yüklenmesi...
ANAKART. Çıkış Birimleri. Giriş Birimleri. İşlem Birimi. Depolama Birimleri. İletişim. Birimleri. Bellek. Birimleri
 ANAKART Giriş Birimleri İşlem Birimi Çıkış Birimleri İletişim Birimleri Bellek Birimleri Depolama Birimleri Anakart Motherboard, Sistem kartı Mainboard gibi isimleri de vardır. Anakart Bilgisayarın en
ANAKART Giriş Birimleri İşlem Birimi Çıkış Birimleri İletişim Birimleri Bellek Birimleri Depolama Birimleri Anakart Motherboard, Sistem kartı Mainboard gibi isimleri de vardır. Anakart Bilgisayarın en
Alıcı Devresi; Sinyali şu şekilde modüle ediyoruz;
 Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
ARDUİNO PROGRAMLAMA 1.ARDUİNO YU TANIMAK
 ARDUİNO PROGRAMLAMA 1.ARDUİNO YU TANIMAK Arduino, açık kaynak kodlu yazılım ve donanıma sahip bir mikrodenetleyici platformudur. Açık kelimesi ile gerçek anlamda açık tasarımı ifade edilmektedir. Baskılı
ARDUİNO PROGRAMLAMA 1.ARDUİNO YU TANIMAK Arduino, açık kaynak kodlu yazılım ve donanıma sahip bir mikrodenetleyici platformudur. Açık kelimesi ile gerçek anlamda açık tasarımı ifade edilmektedir. Baskılı
MAK 1005 Bilgisayar Programlamaya Giriş C DİLİNE GİRİŞ. Prof. Dr. Necmettin Kaya
 MAK 1005 Bilgisayar Programlamaya Giriş C DİLİNE GİRİŞ Prof. Dr. Necmettin Kaya C PROGRAMLAMA DİLİ ÖZELLİKLERİ C programlama dili, 1972 yılında Bell Labortuvarı nda Dennis Ritchie tarafından geliştirilmiştir.
MAK 1005 Bilgisayar Programlamaya Giriş C DİLİNE GİRİŞ Prof. Dr. Necmettin Kaya C PROGRAMLAMA DİLİ ÖZELLİKLERİ C programlama dili, 1972 yılında Bell Labortuvarı nda Dennis Ritchie tarafından geliştirilmiştir.
ARM Ders Notları. SysCtlClockSet( SYSCTL_SYSDIV_4 SYSCTL_USE_PLL SYSCTL_OSC_MAIN SYSCTL_XTAL_8MHZ);
;") Faz Kilitlemeli Döngü (Phase-Look-Loop)-PLL Normalde bir microdenetleyicinin çalışma hızı dışarıdaki bir kristal ile belirlenir. Stellaris EKK- LM3S1968 geliştirme kartının 8 MHz lik bir kristali vardır.
Faz Kilitlemeli Döngü (Phase-Look-Loop)-PLL Normalde bir microdenetleyicinin çalışma hızı dışarıdaki bir kristal ile belirlenir. Stellaris EKK- LM3S1968 geliştirme kartının 8 MHz lik bir kristali vardır.
PIC MİKRODENETLEYİCİLER İÇİN. mikrobasic DERLEYİCİSİ
 PIC MİKRODENETLEYİCİLER İÇİN mikrobasic DERLEYİCİSİ KULLANIM VE UYGULAMA KİTABI Özgün Çeviri: Dr. F. Zeynep KÖKSAL Ph.D. EEE, ODTÜ/1990 Kamuran SAMANCI B. Sc. EEE, Ank.Üni./2006 BETİ BİLİŞİM TEKNOLOJİLERİ
PIC MİKRODENETLEYİCİLER İÇİN mikrobasic DERLEYİCİSİ KULLANIM VE UYGULAMA KİTABI Özgün Çeviri: Dr. F. Zeynep KÖKSAL Ph.D. EEE, ODTÜ/1990 Kamuran SAMANCI B. Sc. EEE, Ank.Üni./2006 BETİ BİLİŞİM TEKNOLOJİLERİ
Bilgisayar Sistemlerine Genel Bakış
 Süleyman Demirel Üniversitesi / Mühendislik Fak. / Bilgisayar Mühendisliği Carnegie Mellon Bölümü Bilgisayar Sistemlerine Genel Bakış BIL-304: Bilgisayar Mimarisi Dersi veren öğretim üyesi: Yrd. Doç. Dr.
Süleyman Demirel Üniversitesi / Mühendislik Fak. / Bilgisayar Mühendisliği Carnegie Mellon Bölümü Bilgisayar Sistemlerine Genel Bakış BIL-304: Bilgisayar Mimarisi Dersi veren öğretim üyesi: Yrd. Doç. Dr.
FPGA İLE UYGULAMA ÖRNEKLERİ
 FPGA ile PWM Sinyal Ü retim Üygulaması FPGA İLE UYGULAMA ÖRNEKLERİ 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda deneme kartımız üzerinde bulunan 1 adet LED
FPGA ile PWM Sinyal Ü retim Üygulaması FPGA İLE UYGULAMA ÖRNEKLERİ 1 FPGA ile (Sahada Programlanabilir Mantık Dizeleri) gerçekleştirilen bu örnek uygulamamızda deneme kartımız üzerinde bulunan 1 adet LED
İçindekiler FPGA GELİŞTİRME KARTI ENERJİ BESLEMESİ:... 5 ENERJİ SİSTEMİ ŞEMASI:... 5 FPGA GELİŞTİRME KARTINA PROGRAM YÜKLEME:... 6
 Hazırlayan: Erkan ÇİL 2016 2 FPGA Geliştirme Kartı Kullanıcı Kılavuzu İçindekiler FPGA Geliştirme Kartı Bilgileri FPGA Geliştirme Kartının Kullanımı FPGA GELİŞTİRME KARTI ENERJİ BESLEMESİ:... 5 ENERJİ
Hazırlayan: Erkan ÇİL 2016 2 FPGA Geliştirme Kartı Kullanıcı Kılavuzu İçindekiler FPGA Geliştirme Kartı Bilgileri FPGA Geliştirme Kartının Kullanımı FPGA GELİŞTİRME KARTI ENERJİ BESLEMESİ:... 5 ENERJİ