Bir Adım (Step) motor;
|
|
|
- Kudret Turk
- 9 yıl önce
- İzleme sayısı:
Transkript
1 Adım (step) motorlar Adım (Step) motorları adından da anlaşılacağı gibi Adım Adım hareket eden yani sargılarından birinin enerjilenmesi ile sadece 1 Adım hareket eden motorlardır. Bu Adımın kaç derece olacağı motorun tasarımına bağlıdır. Adım motor, elektrik enerjisini dönme hareketine çeviren elektro-mekanik bir cihazdır. Elektrik enerjisi alındığında rotor ve buna bağlı şaft, sabit açısal birimlerde Eşit adımlarla dönmeye başlar.

2

3 Örnek olarak; 400 Adımlık (steplik) bir motor bir tam dönüşünü 400 Adımda gerçekleştirir. Yani her bir adımda kat ettiği açı 360/400 = 0.9 derecedir. Bu değer, Adım motorun hassasiyetinin bir göstergesidir. Bir devirdeki Adım sayısı yükseldikçe, Adım motor hassasiyeti ve dolayısı ile maliyeti artar. Step motorlar, yarım Adım modunda çalıştıklarında hassasiyetleri daha da artar. Örnek olarak 400 Adım/tur değerindeki bir Adım motor, yarım Adım modunda tur başına 800 Adım yapar. Bu da 0.9 dereceye oranla daha hassas olan 0.45 derece anlamına gelir.

4 Adım (step) motor
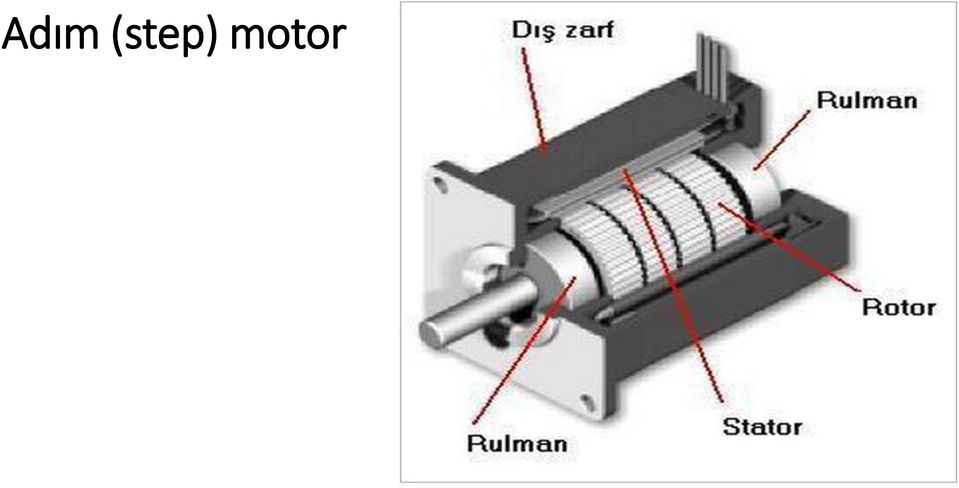
5 Bir Adım (Step) motor; stator, rotor, bunları kapatan bir dış zarf, rotora bağlı şaftın rahat hareket etmesini sağlayan rulmanlardan oluşmuştur. Step motor statorunun birçok kutbu (genellikle sekiz) vardır. Bunların polaritesi elektronik anahtarlar yardımıyla değiştirilir. Rotorun mıknatıslığı ise genellikle sabit mıknatıs ile oluşturulur. (veya dış uyartım yöntemleri ile oluşturulur)

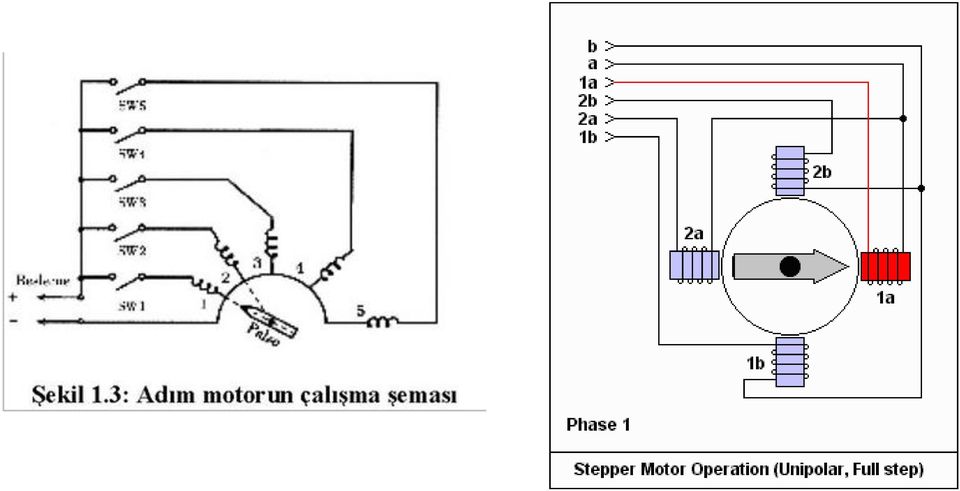
6 Adım (Step) motorlar Adım motorlar robot teknolojisinde sıkça kullanım alanı bulmuştur. Ayrıca maliyetinin düşük olması diğer motorlara (servo) karşı bir üstünlüğüdür. Adım motoru sürekli hareket ettirmek istersek sargılara sırasıyla enerji vermeliyiz. Bir sargıya enerji verdiğimizde (yani o sargı elektromıknatıs olunca) rotor sargının karşısına gelerek durur. Diğer sargıya enerji verinceye kadar burada kilitlenir.
 rotor sargının karşısına gelerek")
7
8 Step motorlar fırçasız doğru akım motorlarıdır. Fırçasız motorlar fırçalı motorlara göre daha uzun ömürlüdürler. Step motorlar geri beslemeye gerek duymadan hız ve pozisyon kontrolünde hata vermeden çalışırlar. Step motor kullanarak yapılacak bir uygulamada öncelikle bilinmesi gereken step motorun her tam adımda döneceği derece miktarıdır. Step motor üzerinde adım derecesi yazılı değil ise step motor dikkatlice el ile döndürülerek adım sayısı sayılabilir. Adım sayısı bilindiğinde 360 adım sayısına bölünerek adım derecesi bulunur. Örneğin 20 adımlı bir step motor 360 lik tam bir dönüşünü 18 lik adımlarla yapar.

9 Step motora gönderilen akım darbeleri belli bir sıraya uygun olmalıdır. Step motor kontrolü sırasında akım darbeleri ne kadar sıklıkla verilirse step motorun hızı o kadar artmış olur. Step motor her akım darbesinde motorun yapısı ve frekans değeriyle orantılı olan belli bir açı kadar hareket eder. Step motora gönderilen akım darbeleri belli bir sıraya uygun olmalıdır. Bu sıra içerisinde sonraki darbe gönderilmeyip bir önce gönderilen darbe uygulamada bırakıldığında step motor frenlenmiş olur.

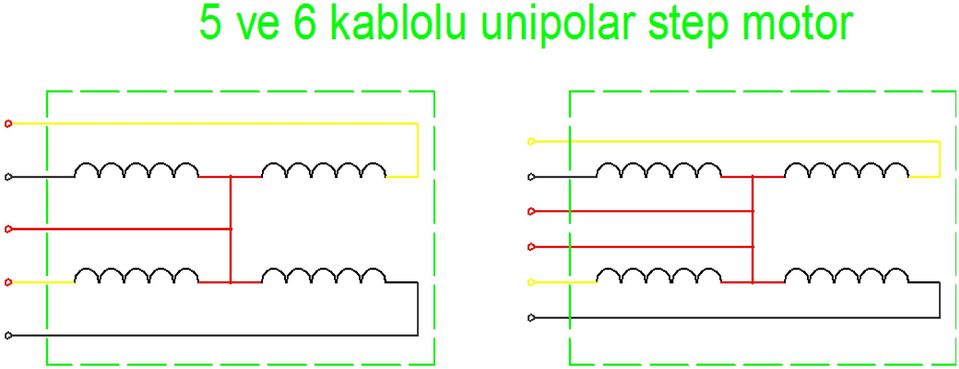
10 Step motorun hareketini sağlamak ve kablo sıralamasını bulabilme: Step motorlarda dört adet bobinden çıkan 4 ayrı uç ve bir de ortak uç olmak üzere 5 adet uç bulunur. Ortak ucun hangisi olduğunu bulmak için ohmmetre ile ölçüm yapılır.

11 Ortak ucun belirlenmesi 5 kablolu step motorlarda 1 adet,6 kablolu step motorlarda ise 2 adet kablo ortak uçtur. Ve bunlar kaynağın pozitif (+)kutbuna bağlanırlar. (+5VDC,+12VDC) Örnek olarak sarı-kırmızı arasında 117 ohm,gri-kırmızı arasında 117 ohm, gri-sarı arasında 234 ohm ölçüm alınmış olsun. Ortak ucun kırmızı olduğu tesbit edilir.

12
13 Kablo ve adım sıralaması Step motorun diğer uçlarına teker teker şase uygulanır. Örneğin 1 numaralı bobin ucuna şase uygulanır. Sonra diğer bir bobin ucuna şase uygulanır. Eğer dönme yok ise bu uç 3 nolu uçtur. Eğer saat ibresi yönünde hareket var ise bu 2 nolu bobin, Eğer CCW saat ibresinin tersine hareket var ise bu 4 nolu bobin ucudur. CW yönünde hareket için CCW yönünde hareket için de şeklinde sıralama yapılır.

14
15 ADIM MOTORUN SÜRÜLMESİ Step motorlar direkt mikrodenetleyici çıkışından çalıştırılamazlar, çıkışların yükseltilmesi için transistör ya da özel step motor sürücü entegrelerin kullanılması gerekir. Ortak uca motorun çalışma gerilimi uygulanır ve diğer 4 uç da transistör ya da sürücü entegresi gibi anahtarlama elemanlarına bağlanır. Bu 4 ucun bağlantısı doğru olduğunda motor döner, yanlış olduğunda ise motor titreme yapar.

16 L293 entegresi
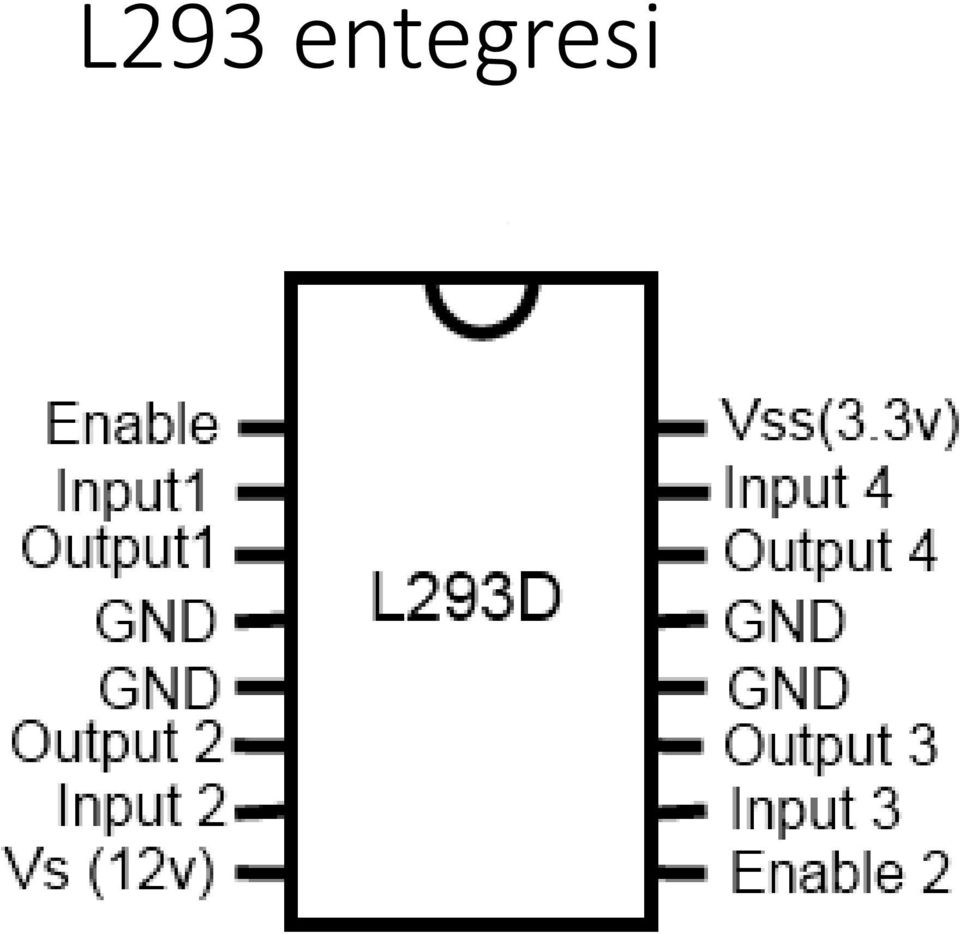

17 Step motorun L293D ile sürülmesi

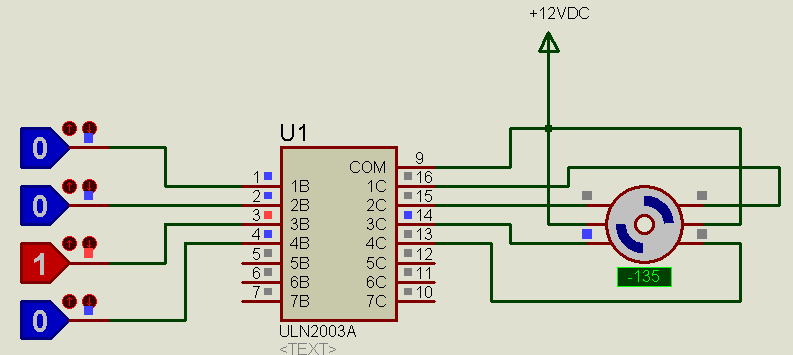
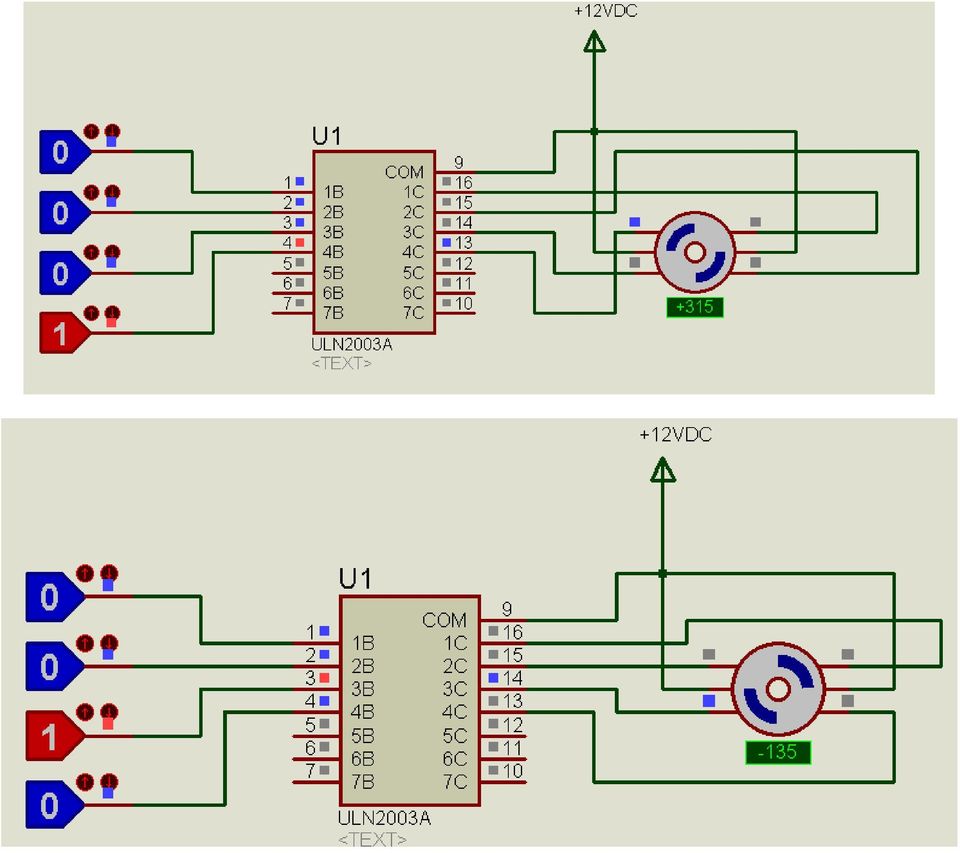
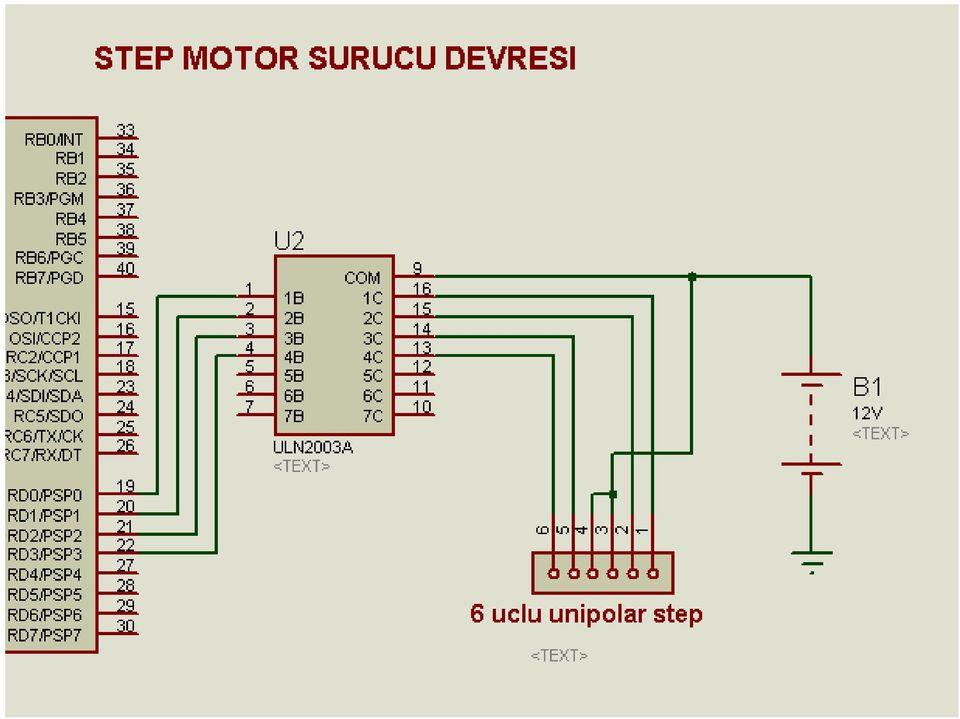
18 Step motorun ULN2003 ile sürülmesi

19 ULN 2003 birbirinden bağımsız 7 adet darlington NPN transistör ve katodları ortak bağlı koruma diyotlarından oluşur


20
21
22
23 Step motorların özellikleri Hata yalnız Adım hatasıdır. Motor bakımı kolaydır. Tasarım maliyeti ucuzdur. Otomatik kilitleme özelliğine sahiptir. Yüke yeterli momenti sağlar. Isınma zararları en azdır. Mikrobilgisayarlar ile kolayca kontrol edilebilir. Kullanım ömrü uzundur. Adım motorların kullanıldığı yerler; bant sürücüleri, imalat tezgâhları, yazıcılar, teyp sürücüleri, tıbbi cihazlar, dikiş makineleri, taksimetreler, kart okuyucular vb. olarak sayılabilir.
24 Step motor Sürücü Devreleri ÖRNEĞİN: 555 Osilatör Entegresi ve 4017 Sayıcı Entegresi İle Yapılan Sürücü Devresi Bu devrede 555 osilatör olarak kullanılmıştır. P1 potansiyometresi yardımıyla üretilen sinyalin frekansı değiştirilmekte bu da 4017 nin çıkışlarındaki sayma sürelerini değiştirmektedir gelen saat sinyalinin hızına göre çıkışlarını sırasıyla değiştirir. Çıkışlara bağlı olan transistörler iletime geçerek sargılara enerjiyi vermiş olurlar. Çıkışlar sırasıyla iletime geçeceği için Adım motor saat sinyali geldiği müddetçe dönecektir.

25 Step motor Sürücü Devreleri

26 Unipolar step motor sürülmesi üç farklı şekilde olabilir.
27 Wave Drive Dalgalı sürüş Bu modda o anda sadece bir stator bobini elektromıknatıs olur. Tam adım sürüşüyle aynı adım sayısına sahiptir fakat tork oldukça azalır. Bu sürüş modu güç harcamasının önemli olduğu durumlarda nadiren kullanılır. Dalgalı sürüşte adım sıralaması Step A B C D
28 Dalgalı sürüş için MikroC kodları void main() { ansel=0; anselh=0; trisd=0; portd=0x0f; do { portd=0x01; portd=0x02; portd=0x04; portd=0x08; while(1);
29 Full Drive Tam adım sürüşü Bu modda aynı anda iki stator bobini enerjilenir yani elektromıknatıs olur. Motor tam tork gücündedir. Olması muhtemel çalışma modudur şeklinde enerji uygulanırsa sağa doğru döner şeklinde akım uygulanırsa diğer yöne döner.
30 Tamadım sürüş adım sıralaması Step A B C D
31 Tamadım sürüş için mikroc kodları void main() { trisd=0; portd=0x0f; do { portd=0x0c; //1100 portd=0x06; //0110 portd=0x03; //0011 portd=0x09; //1001 while(1);
32 Half Drive (yarım adım modu) Bu adımlama modunda aynı anda bir tek ve bir çift bobin enerjilenir. Adımlama açısı yarıya iner. Elde edilen döndürme momenti(tork) %70 e düşer. Önceden 4 adımda gidilen mesafe şimdi 8 yarım adımla alınır şeklinde enerji uygulanırsa bir yöne döner. Sıralama tersten yapılırsa diğer istikamette döner.
33 yarım adımlamanın adım sırası Step A B C D
34 Halfstep için mikroc kodları trisd=0; portd=0x0f; do { portd=0x01; delay_ms(100); portd=0x03; delay_ms(100); portd=0x02; delay_ms(100); portd=0x06; delay_ms(100); portd=0x04; delay_ms(100); portd=0x0c; delay_ms(100); portd=0x08; delay_ms(100); portd=0x09; delay_ms(100); while(1);

35 Bu modellerde iki bobin mevcut. Diğer yönde hareket için stator sargıdan geçen akım yönü değiştirilir. Bunun yapılması için H köprüsü kullanılmalı yani L293D motor sürücüsü. Unipolar ile bipolar motorları ayırt etmek için bobin dirençleri ölçülmeli. Bipolar motorlarda 2 eşit direnç değeri ölçülür. Bipolar step motorlar

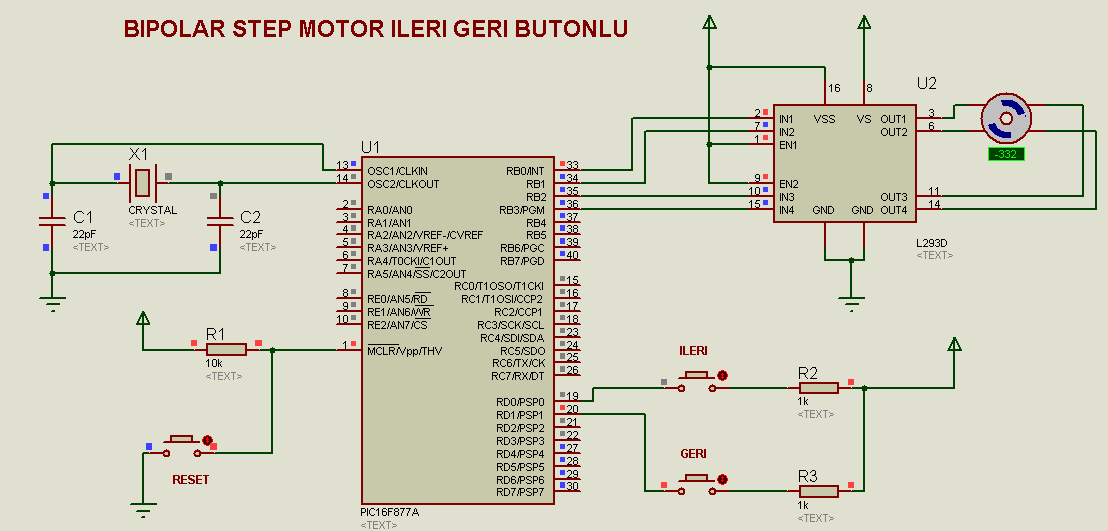
36 Bipolar step motorun sürülmesi
37 Bipolar step sürülmesi için mikroc kodları void main() { ansel=0; anselh=0; trisd=0; portd=0x0f; do { portd=0x01; //0001 portd=0x04; //0100 portd=0x02; //0010 portd=0x08; //1000 while(1); //endless loop sonsuz döngü
38
39
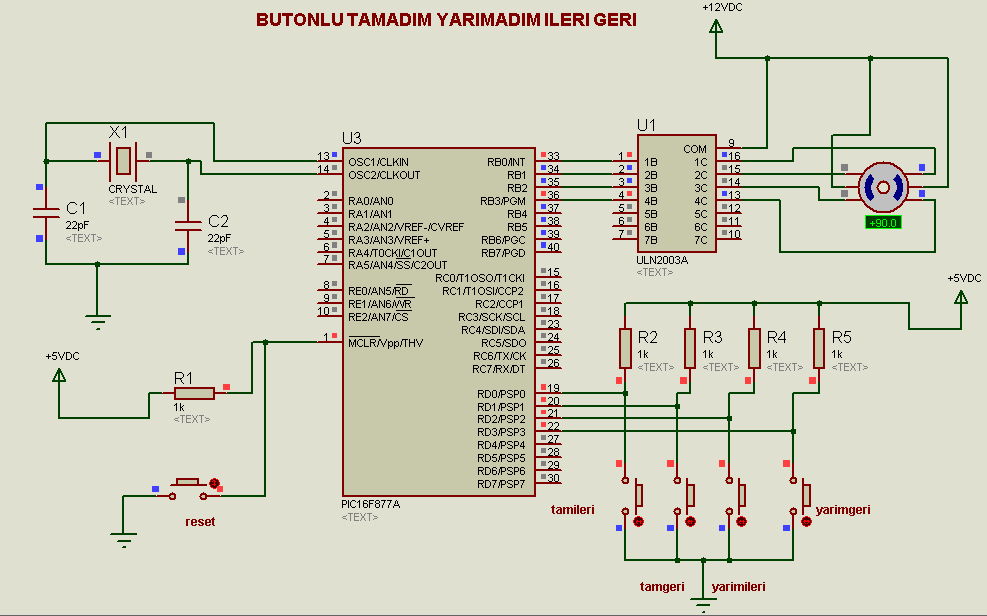
40 Butonlu tamadım yarımadım ileri geri mikroc kodları void main() { adcon1=0x0f; cmcon=0x07; trisb=0; //output motor burda portb=0x00; trisd=1; //inputbutonlar burda portd=0x0f; do { if(button(&portd,0,1,0)) { do { portb=0x0c; //1100 portb=0x06; //0110 portb=0x03; //0011 portb=0x09; //1001 while(1);
41 Butonlu tamadım yarımadım ileri geri mikroc kodları if(button(&portd,1,1,0)) { do { portb=0x09; //1001 portb=0x03; //0011 portb=0x06; //0110 portb=0x0c; //1100 while(1); if(button(&portd,2,1,0)) { do {
42 Butonlu tamadım yarımadım ileri geri mikroc kodları portb=0x08; //1000 portb=0x0c; //1100 portb=0x04; //0100 portb=0x06; //0110 portb=0x02; //0010 portb=0x03; //0011 portb=0x01; //0001 portb=0x09; //1001 while(1);
43 Butonlu tamadım yarımadım ileri geri mikroc kodları if(button(&portd,3,1,0)) { do { portb=0x09; //1001 portb=0x01; //0001 portb=0x03; //0011 portb=0x02; //0010 portb=0x06; //0110 portb=0x04; //0100 portb=0x0c; //1100 portb=0x08; //1000 while(1); while(1);
44 BİPOLAR STEP MOTOR İLERİ GERİ BUTONLU void main() { adcon1=0x0f; cmcon=0x07; trisb=0x00; //output motor burada portb=0x0f; trisd=1; //input butonlar burada portd=0x0f; do { if(button(&portd,1,1,0)) { do { portb=0x01; portb=0x04; portb=0x02; portb=0x08; while(1);
45
46 BİPOLAR STEP MOTOR İLERİ GERİ BUTONLU if(button(&portd,2,1,0)) { do { portb=0x08; portb=0x02; portb=0x04; portb=0x01; while(1); while(1);
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
ÖZEL TASARIMLI MOTORLAR. Elektrik Motorları ve Sürücüleri
 ÖZEL TASARIMLI MOTORLAR Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu
ÖZEL TASARIMLI MOTORLAR Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu
ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ
 1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Buna göre bir iletkende gerilim indüklenebilmesi için; Bir manyetik alan olmalıdır. (Sabit mıknatıs yada elektromıknatıs ile elde edilir.) İletken manyetik alan
1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Buna göre bir iletkende gerilim indüklenebilmesi için; Bir manyetik alan olmalıdır. (Sabit mıknatıs yada elektromıknatıs ile elde edilir.) İletken manyetik alan
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
20. ÜNİTE ASENKRON MOTORLARA YOL VERME YÖNTEMLERİ
 20. ÜNİTE ASENKRON MOTORLARA YOL VERME YÖNTEMLERİ KONULAR 1. Üç Fazlı Asenkron Motorlara a. Direk Yol Verme b. Yıldız-Üçgen Yol Verme 2. Uzaktan (İki Yerden) Kumanda 3. Enversör (Sağ-Sol) Çalıştırma 4.
20. ÜNİTE ASENKRON MOTORLARA YOL VERME YÖNTEMLERİ KONULAR 1. Üç Fazlı Asenkron Motorlara a. Direk Yol Verme b. Yıldız-Üçgen Yol Verme 2. Uzaktan (İki Yerden) Kumanda 3. Enversör (Sağ-Sol) Çalıştırma 4.
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
Step- Servo motor çeşitlerini ve sürücü bağlantılarını yapmak Step motorun bakımını yapmak. Servo motorun bakımını yapmak
 ELEKTRİK MAKİNALARISARIM TEKNİKLERİ 3 Dersin Modülleri Alternatör Sarımı Step- Servo Motorlar Step Motorun Mekanik Bakımı Servo Motorun Mekanik Bakımı Kazandırılan Yeterlikler Alternatör sarımını yapmak
ELEKTRİK MAKİNALARISARIM TEKNİKLERİ 3 Dersin Modülleri Alternatör Sarımı Step- Servo Motorlar Step Motorun Mekanik Bakımı Servo Motorun Mekanik Bakımı Kazandırılan Yeterlikler Alternatör sarımını yapmak
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS)
") ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS) 1. Giriş Adım (Step) Motorları Açısal konumu adımlar halinde değiştiren, çok hassas sinyallerle sürülen motorlara adım motorları denir. Adından
ELEKTRİK MOTORLARI VE SÜRÜCÜLERİ ADIM MOTORLARI (STEP MOTORS) 1. Giriş Adım (Step) Motorları Açısal konumu adımlar halinde değiştiren, çok hassas sinyallerle sürülen motorlara adım motorları denir. Adından
BÖLÜM-10 ELEKTRİK KUMANDA DEVRELERİ. HAZIRLAYAN Dr. Hüseyin BULGURCU ARALIK 2015
 BÖLÜM-10 ELEKTRİK KUMANDA DEVRELERİ HAZIRLAYAN Dr. Hüseyin BULGURCU ARALIK 2015 1 BUTONLAR: Elektrik akımının geçip geçmemesini, yön değiştirmesini sağlayan elemanlardır. Bu elemanların kontaklarından
BÖLÜM-10 ELEKTRİK KUMANDA DEVRELERİ HAZIRLAYAN Dr. Hüseyin BULGURCU ARALIK 2015 1 BUTONLAR: Elektrik akımının geçip geçmemesini, yön değiştirmesini sağlayan elemanlardır. Bu elemanların kontaklarından
Elektrik Motorları ve Sürücüleri
 Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
23. ÜNİTE DOĞRU VE ALTERNATİF AKIM JENERATÖRLERİ
 23. ÜNİTE DOĞRU VE ALTERNATİF AKIM JENERATÖRLERİ KONULAR 1. DİNAMONUN ÇALIŞMA PRENSİBİ VE ÇEŞİTLERİ 2. ALTERNATÖR, ÇALIŞMA PRENSİBİ VE ÇEŞİTLERİ 23.1 DİNAMONUN ÇALIŞMA PRENSİBİ VE ÇEŞİTLERİ 23.1.1Dinamoların
23. ÜNİTE DOĞRU VE ALTERNATİF AKIM JENERATÖRLERİ KONULAR 1. DİNAMONUN ÇALIŞMA PRENSİBİ VE ÇEŞİTLERİ 2. ALTERNATÖR, ÇALIŞMA PRENSİBİ VE ÇEŞİTLERİ 23.1 DİNAMONUN ÇALIŞMA PRENSİBİ VE ÇEŞİTLERİ 23.1.1Dinamoların
Elektrik Makinaları Laboratuvarı
 TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü Elektrik Makinaları Laboratuvarı Deney No: 5-6 Deneyin Adı: Senkron Makine Deneyleri Öğrencinin Adı Soyadı : Numarası : Tarih: 1 Teorik Bilgi
TEKNOLOJİ FAKÜLTESİ Elektrik Elektronik Mühendisliği Bölümü Elektrik Makinaları Laboratuvarı Deney No: 5-6 Deneyin Adı: Senkron Makine Deneyleri Öğrencinin Adı Soyadı : Numarası : Tarih: 1 Teorik Bilgi
MOTOR HIZ KONTROL SİSTEMLERİ
 MOTOR HIZ KONTROL SİSTEMLERİ DCS ENDÜSTRİYEL KONTROL SİSTEMLERİ YAZILIM VE DONANIM MÜHENDİSLİĞİ - 1 - DCS FREKANS KONTROLLÜ HIZ KONTROL SİSTEMLERİ AC Motor Sürücüleri, 3 Fazlı Alternatif akım motorunun
MOTOR HIZ KONTROL SİSTEMLERİ DCS ENDÜSTRİYEL KONTROL SİSTEMLERİ YAZILIM VE DONANIM MÜHENDİSLİĞİ - 1 - DCS FREKANS KONTROLLÜ HIZ KONTROL SİSTEMLERİ AC Motor Sürücüleri, 3 Fazlı Alternatif akım motorunun
DİCLE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM309 SAYISAL ELEKTRONİK LABORATUARI
 DİCLE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM39 SAYISAL ELEKTRONİK LABORATUARI Deney No Deneyin Adı Deney Grubu Deneyi Yapanın Numarası Adı Soyadı İmzası Deneyin
DİCLE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM39 SAYISAL ELEKTRONİK LABORATUARI Deney No Deneyin Adı Deney Grubu Deneyi Yapanın Numarası Adı Soyadı İmzası Deneyin
10. ÜNİTE DİRENÇ BAĞLANTILARI VE KİRCHOFF KANUNLARI
 10. ÜNİTE DİRENÇ BAĞLANTILARI VE KİRCHOFF KANUNLARI KONULAR 1. SERİ DEVRE ÖZELLİKLERİ 2. SERİ BAĞLAMA, KİRŞOFUN GERİLİMLER KANUNU 3. PARALEL DEVRE ÖZELLİKLERİ 4. PARALEL BAĞLAMA, KİRŞOF UN AKIMLAR KANUNU
10. ÜNİTE DİRENÇ BAĞLANTILARI VE KİRCHOFF KANUNLARI KONULAR 1. SERİ DEVRE ÖZELLİKLERİ 2. SERİ BAĞLAMA, KİRŞOFUN GERİLİMLER KANUNU 3. PARALEL DEVRE ÖZELLİKLERİ 4. PARALEL BAĞLAMA, KİRŞOF UN AKIMLAR KANUNU
HİDROLİK PNÖMATİK DERSİ ÇALIŞMA SORULARI
 1. Aşağıdaki ifadelerden hangisi yanlıştır? HİDROLİK PNÖMATİK DERSİ ÇALIŞMA SORULARI a. Can güvenliği tehlikesi hidrolik sistemlerde daha fazladır. b. Hidrolikte çalışma hızı yüksek, pnömatikte hız yavaştır.
1. Aşağıdaki ifadelerden hangisi yanlıştır? HİDROLİK PNÖMATİK DERSİ ÇALIŞMA SORULARI a. Can güvenliği tehlikesi hidrolik sistemlerde daha fazladır. b. Hidrolikte çalışma hızı yüksek, pnömatikte hız yavaştır.
Adım Motoru: açıya adım. Şekil 8.2 tekyönlü. Lab 8. Siyah (A) Mavi ( B ) Kırmızı (B)
 Mavi ( B ) Kırmızı (B)") 446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
UYGULAMA 1 Aşağıdaki basit temel kumanda devrelerini gerçekleştiriniz.
 UYGULAMA 1 Aşağıdaki basit temel kumanda devrelerini gerçekleştiriniz. a - Start stop butonu yardımıyla güç devresinin (lamba veya motor) çalıştırılması, İşin Çalışması : Kumanda devresindeki start butonuna
UYGULAMA 1 Aşağıdaki basit temel kumanda devrelerini gerçekleştiriniz. a - Start stop butonu yardımıyla güç devresinin (lamba veya motor) çalıştırılması, İşin Çalışması : Kumanda devresindeki start butonuna
5. ÜNİTE ÜÇ FAZLI ALTERNATİF AKIMLAR
 5. ÜNİTE ÜÇ FAZLI ALTERNATİF AKIMLAR KONULAR 1. Üç Fazlı Alternatif Akımların Tanımı Ve Elde Edilmeleri 2. Yıldız Ve Üçgen Bağlama, Her İki Bağlamada Çekilen Akımlar Ve Güçlerin Karşılaştırılması 3. Bir
5. ÜNİTE ÜÇ FAZLI ALTERNATİF AKIMLAR KONULAR 1. Üç Fazlı Alternatif Akımların Tanımı Ve Elde Edilmeleri 2. Yıldız Ve Üçgen Bağlama, Her İki Bağlamada Çekilen Akımlar Ve Güçlerin Karşılaştırılması 3. Bir
Eklentiler. Eklentiler
 ,2 X X testregistrierung Solenoid valf Damperlerin devre sonu konumlarını (AÇIK ve/veya KAPALI) algılamak ve pnömatik servomotorlara kontrol giriş sinyali sağlamak için Konum anahtarları gaz sızdırmaz
,2 X X testregistrierung Solenoid valf Damperlerin devre sonu konumlarını (AÇIK ve/veya KAPALI) algılamak ve pnömatik servomotorlara kontrol giriş sinyali sağlamak için Konum anahtarları gaz sızdırmaz
ELEKTRİK MOTORLARI. Step motorun bakımını yapmak. Servo motorun bakımını yapmak
 ELEKTRİK MOTORLARI Dersin Modülleri Elektrikli Ev Aletlerinde AC Motorlar Elektrikli Ev Aletlerinde DC Motorlar Step- Servo Motorlar Step Motorun Mekanik Bakımı Servo Motorun Mekanik Bakımı Kazandırılan
ELEKTRİK MOTORLARI Dersin Modülleri Elektrikli Ev Aletlerinde AC Motorlar Elektrikli Ev Aletlerinde DC Motorlar Step- Servo Motorlar Step Motorun Mekanik Bakımı Servo Motorun Mekanik Bakımı Kazandırılan
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 ELEKTRİK ELEKTRONİK TEKNOLOJİSİ") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ STEP MOTORUN MEKANİK BAKIMI ANKARA 2007 Milli Eğitim Bakanlığı tarafından
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK ELEKTRONİK TEKNOLOJİSİ STEP MOTORUN MEKANİK BAKIMI ANKARA 2007 Milli Eğitim Bakanlığı tarafından
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 4 Motor Denetimi Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 4 Motor Denetimi Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
5/21/2015. Transistörler
 Transistörler İki polarmalı yüzey temaslı transistörler, teknik ifadelerde BJT ( Bipolar Junction Transistör) olarak adlandırılmaktadır. Transistör birçok elektronik devrede uygulama bulan işaret yükseltme
Transistörler İki polarmalı yüzey temaslı transistörler, teknik ifadelerde BJT ( Bipolar Junction Transistör) olarak adlandırılmaktadır. Transistör birçok elektronik devrede uygulama bulan işaret yükseltme
Servus Latince kökenli,
 Servus Latince kökenli, köle anlamına gelmektedir. Servo Mekanizma istenilen gösterge değerlerine göre hareket eden bir kontrol mekanizmasıdır. yüksek kararlılıkta çalışabilmek için çalışma şartlarını
Servus Latince kökenli, köle anlamına gelmektedir. Servo Mekanizma istenilen gösterge değerlerine göre hareket eden bir kontrol mekanizmasıdır. yüksek kararlılıkta çalışabilmek için çalışma şartlarını
3 FAZLI ASENKRON MOTORLAR
 3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3. Bölüm. DA-DA Çevirici Devreler (DC Konvertörler) Doç. Dr. Ersan KABALCI AEK-207 GÜNEŞ ENERJİSİ İLE ELEKTRİK ÜRETİMİ
 Doç. Dr. Ersan KABALCI AEK-207 GÜNEŞ ENERJİSİ İLE ELEKTRİK ÜRETİMİ") 3. Bölüm DA-DA Çevirici Devreler (D Konvertörler) Doç. Dr. Ersan KABA AEK-207 GÜNEŞ ENERJİSİ İE EEKTRİK ÜRETİMİ Dönüştürücü Devreler Gücün DA-DA dönüştürülmesi anahtarlamalı tip güç konvertörleri ile yapılır.
3. Bölüm DA-DA Çevirici Devreler (D Konvertörler) Doç. Dr. Ersan KABA AEK-207 GÜNEŞ ENERJİSİ İE EEKTRİK ÜRETİMİ Dönüştürücü Devreler Gücün DA-DA dönüştürülmesi anahtarlamalı tip güç konvertörleri ile yapılır.
Elektromekanik Kumanda Sistemleri / Ders Notları
 İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU
 ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
ROBOT KOL BİTİRME PROJESİ DÖNEM İÇİ RAPORU İSMAİL KAHRAMAN-ŞEYMA ÖZTÜRK 200713151027 200513152008 Robot Kol Mekanizması: Şekildeki robot-insan benzetmesinden yola çıkarak, bel kısmı tekerlekli ve sağa-sola-ileri-geri
SK 1200 Seviye Alarm Kontrolörü Montaj ve Kullanım Kitapçığı
 SK 1200 Seviye Alarm Kontrolörü Montaj ve Kullanım Kitapçığı SK 1200 MKK v10.02-tr 1 İÇİNDEKİLER 1. ÖNEMLİ NOTLAR... 3 2. TANIMLAMA... 4 3. TEKNİK ÖZELLİKLER... 5 4. MONTAJ ve KABLOLAMA... 5 4.1. Montaj...
SK 1200 Seviye Alarm Kontrolörü Montaj ve Kullanım Kitapçığı SK 1200 MKK v10.02-tr 1 İÇİNDEKİLER 1. ÖNEMLİ NOTLAR... 3 2. TANIMLAMA... 4 3. TEKNİK ÖZELLİKLER... 5 4. MONTAJ ve KABLOLAMA... 5 4.1. Montaj...
TEMEL ELEKTRİK VE ELEKTRONİK DERSİ
 TEMEL ELEKTRİK VE ELEKTRONİK DERSİ Dersin Modülleri Temel Elektrik ve Elektronik 1 Temel Elektrik ve Elektronik 2 Kazandırılan Yeterlikler Temel elektrik ve elektronik işlemlerini yapmak Temel elektrik
TEMEL ELEKTRİK VE ELEKTRONİK DERSİ Dersin Modülleri Temel Elektrik ve Elektronik 1 Temel Elektrik ve Elektronik 2 Kazandırılan Yeterlikler Temel elektrik ve elektronik işlemlerini yapmak Temel elektrik
2- Tristör ile yük akımı değiştirilerek ayarlı yükkontrolü yapılabilir.
 Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
BÖLÜM-3 SÜRÜCÜLER (OPERATÖRLER)
") BÖLÜM-3 SÜRÜCÜLER (OPERATÖRLER) HAZIRLAYAN Doç. Dr. Hüseyin BULGURCU 3.1 GİRİŞ Sürücüler, vanalar ve damperleri açık ve kapalı konumlara ilerletirler. Kontrol cihazından gelen bir sinyale yanıt verirler.
BÖLÜM-3 SÜRÜCÜLER (OPERATÖRLER) HAZIRLAYAN Doç. Dr. Hüseyin BULGURCU 3.1 GİRİŞ Sürücüler, vanalar ve damperleri açık ve kapalı konumlara ilerletirler. Kontrol cihazından gelen bir sinyale yanıt verirler.
B) TEMEL KONTROLLÜ GÜÇ ELEMANLARI
 TEMEL KONTROLLÜ GÜÇ ELEMANLARI") B) TEMEL KONTROLLÜ GÜÇ ELEMANLARI 1. TRİSTÖR (SCR) Yapı, Sembol ve İletim Karakteristiği Yapı ve Sembol İletim Karakteristiği Karakteristik Değerler i G : Kapı Akımı u G : Kapı Gerilimi I GT : Tetikleme
B) TEMEL KONTROLLÜ GÜÇ ELEMANLARI 1. TRİSTÖR (SCR) Yapı, Sembol ve İletim Karakteristiği Yapı ve Sembol İletim Karakteristiği Karakteristik Değerler i G : Kapı Akımı u G : Kapı Gerilimi I GT : Tetikleme
TESTONE TTS 125-3300 TRAFO TEST SİSTEMİ
 TESTONE TTS 125-3300 TRAFO TEST SİSTEMİ ULTRA HASSAS KULLANICI DOSTU SİZ BAĞLANTILARI YAPIN GERİSİ TAM OTOMATİK SİSTEM KONSEPTİ TTS 125-330 Trafo Test Sistemi, dağıtım trafoların YÜKTE - BOŞTA kayıplarının
TESTONE TTS 125-3300 TRAFO TEST SİSTEMİ ULTRA HASSAS KULLANICI DOSTU SİZ BAĞLANTILARI YAPIN GERİSİ TAM OTOMATİK SİSTEM KONSEPTİ TTS 125-330 Trafo Test Sistemi, dağıtım trafoların YÜKTE - BOŞTA kayıplarının
PIC PROGRAMLAMA STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ NEDİR? Unipolar Step Motorlar. Uç TESPİTİ NASIL YAPILIR?
 PIC PROGRAMLAMA [email protected] www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
PIC PROGRAMLAMA [email protected] www.mekatroniklab.com.tr STEP MOTOR SÜRÜCÜ VE KONTROL AMAÇ Bu ayki sayımızda, özellikle CNC ve robotik uygulamalarda oldukça yaygın olarak kullanılan step motorlar
ÖĞRENME ALANI : FĐZĐKSEL OLAYLAR ÜNĐTE 3 : YAŞAMIMIZDAKĐ ELEKTRĐK (MEB)
") ÖĞENME LNI : FZKSEL OLYL ÜNTE 3 : YŞMIMIZDK ELEKTK (MEB) C SE E PLEL BĞLM (5 ST) 1 Dirençlerin Bağlanması 2 Özdeş mpullerin Bağlanması 3 (*) Özdeş Olmayan mpullerin Bağlanması : 4 Kısa Devre 5 Pillerin
ÖĞENME LNI : FZKSEL OLYL ÜNTE 3 : YŞMIMIZDK ELEKTK (MEB) C SE E PLEL BĞLM (5 ST) 1 Dirençlerin Bağlanması 2 Özdeş mpullerin Bağlanması 3 (*) Özdeş Olmayan mpullerin Bağlanması : 4 Kısa Devre 5 Pillerin
MALATYA BATTALGAZİ METEM ENDÜSTRİYEL KONTROL VE ARIZA DERSİNDE YAPILABİLECEK DENEYLER
 MALATYA BATTALGAZİ METEM ENDÜSTRİYEL KONTROL VE ARIZA DERSİNDE YAPILABİLECEK DENEYLER Bu derse giren arkadaşlarımızın ders işlenirken öğrencilerine yaptırabilecekleri dört adet deney hazırladık. Arkadaşlarımızın
MALATYA BATTALGAZİ METEM ENDÜSTRİYEL KONTROL VE ARIZA DERSİNDE YAPILABİLECEK DENEYLER Bu derse giren arkadaşlarımızın ders işlenirken öğrencilerine yaptırabilecekleri dört adet deney hazırladık. Arkadaşlarımızın
DENEY 14 Otomatik Lamba Parlaklığı Kontrol Devresi
 DENEY 14 Otomatik Lamba Parlaklığı Kontrol Devresi DENEYİN AMACI 1. Triyak ve SCR faz kontrol devrelerinin çalışmasını öğrenmek. 2. Diyak-triyak faz kontrol devrelerinin çalışmasını öğrenmek. 3. Bir otomatik
DENEY 14 Otomatik Lamba Parlaklığı Kontrol Devresi DENEYİN AMACI 1. Triyak ve SCR faz kontrol devrelerinin çalışmasını öğrenmek. 2. Diyak-triyak faz kontrol devrelerinin çalışmasını öğrenmek. 3. Bir otomatik
Bölüm 12 PWM Demodülatörleri
 Bölüm 12 Demodülatörleri 12.1 AMAÇ 1. Darbe Genişlik Demodülatörünün çalışma prensibinin anlaşılması. 2. Çarpım detektörü kullanarak bir darbe genişlik demodülatörünün gerçekleştirilmesi. 12.2 TEMEL KAVRAMLARIN
Bölüm 12 Demodülatörleri 12.1 AMAÇ 1. Darbe Genişlik Demodülatörünün çalışma prensibinin anlaşılması. 2. Çarpım detektörü kullanarak bir darbe genişlik demodülatörünün gerçekleştirilmesi. 12.2 TEMEL KAVRAMLARIN
MÜHENDİSLİK ve MİMARLIK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK DEVRELER LABORATUVARI DENEY FÖYÜ 4
 MÜHENDİSLİK ve MİMARLIK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK DEVRELER LABORATUVARI DENEY FÖYÜ 4 LABORATUVARDA UYULMASI GEREKEN KURALLAR Laboratuvara kesinlikle YİYECEK VE İÇECEK getirilmemelidir.
MÜHENDİSLİK ve MİMARLIK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK DEVRELER LABORATUVARI DENEY FÖYÜ 4 LABORATUVARDA UYULMASI GEREKEN KURALLAR Laboratuvara kesinlikle YİYECEK VE İÇECEK getirilmemelidir.
WZM-2H090MK İki Faz Step Motor Sürücüsü
 WZM-2H090MK İki Faz Step Motor Sürücüsü Özet WZM-2H090MK iki faz step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı, çok güçlü
WZM-2H090MK İki Faz Step Motor Sürücüsü Özet WZM-2H090MK iki faz step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı, çok güçlü
ELEKTRİKLİ ZIMPARA MAKİNASI
 ELEKTRİKLİ ZIMPARA MAKİNASI MODEL RTM373 KULLANIM KILAVUZU CİHAZIN ÜNİTELERİ 1. AÇMA / KAPAMA ŞALTERİ 2. AÇMA KAPAMA ŞALTERI KILITLEME DÜĞMESI 3. TOZ ÇIKIŞ YERİ 4. BANT ZIMPARA 5. ZIMPARA AYARLAMA VİDASI
ELEKTRİKLİ ZIMPARA MAKİNASI MODEL RTM373 KULLANIM KILAVUZU CİHAZIN ÜNİTELERİ 1. AÇMA / KAPAMA ŞALTERİ 2. AÇMA KAPAMA ŞALTERI KILITLEME DÜĞMESI 3. TOZ ÇIKIŞ YERİ 4. BANT ZIMPARA 5. ZIMPARA AYARLAMA VİDASI
AKIM GEÇEN TELE ETKİYEN MANYETİK KUVVETLERİN ÖLÇÜMÜ (AKIM TERAZİSİ)
") AKIM GEÇEN TELE ETKİYEN MANYETİK KUVVETLERİN ÖLÇÜMÜ (AKIM TERAZİSİ) AMAÇ: 1. Bu deneyde, düzgün ve statik bir manyetik B alanında I elektrik akımını taşıyan tele etkiyen bir kuvvet olduğunu gözlemlemek
AKIM GEÇEN TELE ETKİYEN MANYETİK KUVVETLERİN ÖLÇÜMÜ (AKIM TERAZİSİ) AMAÇ: 1. Bu deneyde, düzgün ve statik bir manyetik B alanında I elektrik akımını taşıyan tele etkiyen bir kuvvet olduğunu gözlemlemek
İletişim en genel tanımı ile; bir mesaj alışverişidir. Ancak iletişim yapı gereği bir sistemdir. İletişim sisteminin bileşenleri:
 İletişim en genel tanımı ile; bir mesaj alışverişidir. Ancak iletişim yapı gereği bir sistemdir. İletişim sisteminin bileşenleri: - Kaynak - Mesaj - İletim Hattı - - Gürültü Kaynak Mesaj İ L E T İ M H
İletişim en genel tanımı ile; bir mesaj alışverişidir. Ancak iletişim yapı gereği bir sistemdir. İletişim sisteminin bileşenleri: - Kaynak - Mesaj - İletim Hattı - - Gürültü Kaynak Mesaj İ L E T İ M H
DERS BİLGİ FORMU ELEKTROMEKANİK KUMANDA SİSTEMLERİ ELEKTRİK VE ENERJİ. Haftalık Ders Saati. Okul Eğitimi Süresi
 DERS BİLGİ FORMU DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA
DERS BİLGİ FORMU DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA
RC Osilatörler. Şekil 3.26 - Temel Osilatör Blok Diyagramı
 RC Osilatörler Kendi kendine sinyal üreten devrelere "osilatör" denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen, testere dişi gibi sinyaller meydana
RC Osilatörler Kendi kendine sinyal üreten devrelere "osilatör" denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen, testere dişi gibi sinyaller meydana
Elektrik Devre Temelleri
 Elektrik Devre Temelleri Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi Fundamentals of Electric Circuits, Charles K. Alexander and Matthew N. O. Sadiku McGraw Hill,
Elektrik Devre Temelleri Doç. Dr. M. Kemal GÜLLÜ Elektronik ve Haberleşme Mühendisliği Kocaeli Üniversitesi Fundamentals of Electric Circuits, Charles K. Alexander and Matthew N. O. Sadiku McGraw Hill,
FİLTRELİ KOMPANZASYON SİSTEMLERİ
 FİLTRELİ KOMPANZASYON SİSTEMLERİ Harmoniklerin yoğun olduğu sistemlerde harmonik akımların ve buna bağlı olarak harmonik gerilim bozulmalarının artışını engellemek için kompanzasyon sistemleri filtreli
FİLTRELİ KOMPANZASYON SİSTEMLERİ Harmoniklerin yoğun olduğu sistemlerde harmonik akımların ve buna bağlı olarak harmonik gerilim bozulmalarının artışını engellemek için kompanzasyon sistemleri filtreli
ÜÇ FAZLI MOTORLARIN BİR FAZLI OLARAK ÇALIŞTIRILMASI
 1 ÜÇ FALI MOTOLAI Bİ FALI OLAAK ÇALIŞTIILMASI ÜÇ FALI ASEKO MOTOLAI Bİ FALI OLAAK ÇALIŞTIILMASI Üç fazlı şebekenin bulunmadığı yerlerde veya özel olarak üç fazlı motorlar bir fazlı olarak çalıştırılırlar.
1 ÜÇ FALI MOTOLAI Bİ FALI OLAAK ÇALIŞTIILMASI ÜÇ FALI ASEKO MOTOLAI Bİ FALI OLAAK ÇALIŞTIILMASI Üç fazlı şebekenin bulunmadığı yerlerde veya özel olarak üç fazlı motorlar bir fazlı olarak çalıştırılırlar.
CS 5000 KAPORTA ÇEKTİRME MAKİNASI
 KULLANMA KLAVUZU CS 5000 KAPORTA ÇEKTİRME MAKİNASI 1. KAPORTA ÇEKTİRME MAKİNASI KULLANMADAN ÖNCE DİKKAT EDİLMESİ GEREKEN HUSUSLAR VE GÜVENLİK UYARILARI - Koruyucu ekipmanlarınızı tedarik ediniz. - Çalışma
KULLANMA KLAVUZU CS 5000 KAPORTA ÇEKTİRME MAKİNASI 1. KAPORTA ÇEKTİRME MAKİNASI KULLANMADAN ÖNCE DİKKAT EDİLMESİ GEREKEN HUSUSLAR VE GÜVENLİK UYARILARI - Koruyucu ekipmanlarınızı tedarik ediniz. - Çalışma
DİYOTLU DALGA ŞEKİLLENDİRİCİLER
 DENEY NO : 6 DİYOTLU DALGA ŞEKİLLENDİRİCİLER Bu deneyde, diyotun bir dalga şekillendirici olarak çalışmasını görmek ve regülatör, kırpıcı, kenetleyici devrelerin çalışmasını öğrenmek amaçlanmıştır. I-
DENEY NO : 6 DİYOTLU DALGA ŞEKİLLENDİRİCİLER Bu deneyde, diyotun bir dalga şekillendirici olarak çalışmasını görmek ve regülatör, kırpıcı, kenetleyici devrelerin çalışmasını öğrenmek amaçlanmıştır. I-
3. ÜNİTE DOĞRU AKIM MOTORLARININ TEMEL PRENSİBLERİ VE ÇEŞİTLERİ
 3. ÜNİTE DOĞRU AKIM MOTORLARININ TEMEL PRENSİBLERİ VE ÇEŞİTLERİ KONULAR 1. Çalışma Prensipleri 2. D.A. motorlarında devir sayısı, Moment ve Mekanik Güç 3. D.A. motorlarında Endüvi Reaksiyonu ve Komütasyon
3. ÜNİTE DOĞRU AKIM MOTORLARININ TEMEL PRENSİBLERİ VE ÇEŞİTLERİ KONULAR 1. Çalışma Prensipleri 2. D.A. motorlarında devir sayısı, Moment ve Mekanik Güç 3. D.A. motorlarında Endüvi Reaksiyonu ve Komütasyon
Technical Info. Triger kayışı değişimi montaj tavsiyeleri Opel 1,8i 16V C 18 XE örneği
 Technical Info www contitech de Triger kayışı değişimi montaj tavsiyeleri Opel 1,8i 16V C 18 XE örneği 1,8i 16V C 18 XE motor tipi çeşitli motor hacimlerinde olmak üzere Opel markasının modellerinde büyük
Technical Info www contitech de Triger kayışı değişimi montaj tavsiyeleri Opel 1,8i 16V C 18 XE örneği 1,8i 16V C 18 XE motor tipi çeşitli motor hacimlerinde olmak üzere Opel markasının modellerinde büyük
18. ÜNİTE ÜÇ FAZLI SAYAÇ BAĞLANTILARI
 18. ÜNİTE ÜÇ FAZLI SAYAÇ BAĞLANTILARI KONULAR 1. ÜÇ FAZLI SAYAÇLARIN YAPILARI VE ÇALIŞMASI 2. ÜÇ FAZLI DÖRT TELLİ SAYAÇ BAĞLANTISI 3. ÜÇ FAZLI ÜÇ TELLİ (ARON) SAYAÇ BAĞLANTISI 18.1 ÜÇ FAZLI SAYAÇLARIN
18. ÜNİTE ÜÇ FAZLI SAYAÇ BAĞLANTILARI KONULAR 1. ÜÇ FAZLI SAYAÇLARIN YAPILARI VE ÇALIŞMASI 2. ÜÇ FAZLI DÖRT TELLİ SAYAÇ BAĞLANTISI 3. ÜÇ FAZLI ÜÇ TELLİ (ARON) SAYAÇ BAĞLANTISI 18.1 ÜÇ FAZLI SAYAÇLARIN
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
ELEKTRİK TESİSATLARINDA ENERJİ TASARRUFU: -----------------------------------------------------------------------------
 ELEKTRİK TESİSATLARINDA ENERJİ TASARRUFU: ----------------------------------------------------------------------------- Son zamanlarda, elektrik tesisatlarında canlıya ve mala karşı alınan zorunlu önlemler
ELEKTRİK TESİSATLARINDA ENERJİ TASARRUFU: ----------------------------------------------------------------------------- Son zamanlarda, elektrik tesisatlarında canlıya ve mala karşı alınan zorunlu önlemler
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU
 5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Engin Avcı [email protected] Abdulkadir Şengür [email protected] Giriş Ülkemizde
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Engin Avcı [email protected] Abdulkadir Şengür [email protected] Giriş Ülkemizde
MIT 8.02, Bahar 2002 Ödev # 7 Çözümler
 Adam S. Bolton [email protected] MIT 8.02, Bahar 2002 Ödev # 7 Çözümler 17 Nisan 2002 Problem 7.1 İdeal transformatör. (Giancoli 29-42) Transformatörün birincil (giriş) sargısına bağlanmış bir voltmetrenin
Adam S. Bolton [email protected] MIT 8.02, Bahar 2002 Ödev # 7 Çözümler 17 Nisan 2002 Problem 7.1 İdeal transformatör. (Giancoli 29-42) Transformatörün birincil (giriş) sargısına bağlanmış bir voltmetrenin
VİDALAMA MAKİNASI MODEL RTM311 TANITMA VE KULLANIM KILAVUZU
 VİDALAMA MAKİNASI MODEL RTM311 TANITMA VE KULLANIM KILAVUZU CİHAZIN ÜNİTELERİ 1. BİTS UÇ TUTUCU 2. ASKILIK 3. SAĞ-SOL DÜĞMESİ 4. DEVİR AYAR DÜĞMESİ 5. ANAHTAR 6. ANAHTAR KİLİTLEME DÜĞMESİ 7. KİLİTLEME
VİDALAMA MAKİNASI MODEL RTM311 TANITMA VE KULLANIM KILAVUZU CİHAZIN ÜNİTELERİ 1. BİTS UÇ TUTUCU 2. ASKILIK 3. SAĞ-SOL DÜĞMESİ 4. DEVİR AYAR DÜĞMESİ 5. ANAHTAR 6. ANAHTAR KİLİTLEME DÜĞMESİ 7. KİLİTLEME
T C MİLLÎ EĞİTİM BAKANLIĞI
 T C MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ LOJİK UYGULAMALAR 4 ANKARA 26 Milli Eğitim Bakanlığı tarafından geliştirilen
T C MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ LOJİK UYGULAMALAR 4 ANKARA 26 Milli Eğitim Bakanlığı tarafından geliştirilen
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU
 PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: [email protected] Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
PIC MİKROKONTROLÖR TABANLI ADIM MOTORU KONTROLU Prof. Dr. Doğan İbrahim Yakın Doğu Üniversitesi, Bilgisayar Mühendisliği Bölümü, KKTC E-mail: [email protected] Tel: (392) 2236464 ÖZET Adım motorlarını (stepping
ELK273 Elektrik ve Elektronik Mühendisliğinin Temelleri Ders 6- Kondansatör
 ELK273 Elektrik ve Elektronik Mühendisliğinin Temelleri Ders 6- Kondansatör Yard.Doç.Dr. Ahmet Özkurt [email protected] http://ahmetozkurt.net http://www.mee.tcd.ie/~ledoyle/teaching/1e6/capacitorstransientsandapplications.ppt
ELK273 Elektrik ve Elektronik Mühendisliğinin Temelleri Ders 6- Kondansatör Yard.Doç.Dr. Ahmet Özkurt [email protected] http://ahmetozkurt.net http://www.mee.tcd.ie/~ledoyle/teaching/1e6/capacitorstransientsandapplications.ppt
Jeneratör'ün Genel Özellikleri
 GF SERİSİ DİZEL JENERATÖR MODEL BAŞLANGIÇ GÜÇ SÜREKLİ GÜÇ DR-90 54KW/68KVA 60KW/75KVA STANDART ÖZELLİKLER Motor:Weifag Motor R4105IZD Radiator 40 C max,fanlar kayış yardımı ile çalışır, Akü alternatör
GF SERİSİ DİZEL JENERATÖR MODEL BAŞLANGIÇ GÜÇ SÜREKLİ GÜÇ DR-90 54KW/68KVA 60KW/75KVA STANDART ÖZELLİKLER Motor:Weifag Motor R4105IZD Radiator 40 C max,fanlar kayış yardımı ile çalışır, Akü alternatör
MALZEME BİLGİSİ. Atomların Yapısı
 MALZEME BİLGİSİ Dr.- Ing. Rahmi ÜNAL Konu: Atomların Yapısı 1 Atomların Yapıları Atomlar başlıca üç temel atom altı parçacıktan oluşur; Protonlar (+ yüklü) Nötronlar (yüksüz) Elektronlar (- yüklü) Basit
MALZEME BİLGİSİ Dr.- Ing. Rahmi ÜNAL Konu: Atomların Yapısı 1 Atomların Yapıları Atomlar başlıca üç temel atom altı parçacıktan oluşur; Protonlar (+ yüklü) Nötronlar (yüksüz) Elektronlar (- yüklü) Basit
ASENKRON (İNDÜKSİYON)
") ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
Online teknik sayfa GME700 EKSTRAKTIF GAZ ANALIZ CIHAZLARI
 Online teknik sayfa A B C D E F H I J K L M N O P Q R S T Sipariş bilgileri Tip Stok no. Talep üzerine Uygulama yeri ve müşteri gereklilikleri doğrultusunda kullanılacak cihazın özellikleri ve spesifikasyonları
Online teknik sayfa A B C D E F H I J K L M N O P Q R S T Sipariş bilgileri Tip Stok no. Talep üzerine Uygulama yeri ve müşteri gereklilikleri doğrultusunda kullanılacak cihazın özellikleri ve spesifikasyonları
Servo Motor. Servo Motorların Kullanıldığı Yerler
 Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Bölüm 5 DSB-SC ve SSB Modülatörleri
 Bölüm 5 DSB-SC ve SSB Modülatörleri 5.1 AMAÇ 1. Çift yan band bastırılmış taşıyıcı ve tek yan band modüleli işaretlerin nasıl üretildiğinin öğrenilmesi. 2. Çift yan band bastırılmış taşıyıcı ve tek yan
Bölüm 5 DSB-SC ve SSB Modülatörleri 5.1 AMAÇ 1. Çift yan band bastırılmış taşıyıcı ve tek yan band modüleli işaretlerin nasıl üretildiğinin öğrenilmesi. 2. Çift yan band bastırılmış taşıyıcı ve tek yan
T.C. MİLLİ EĞİTİM BAKANLIĞI DENİZCİLİK MİKRODENETLEYİCİ-6
 T.C. MİLLİ EĞİTİM BAKALIĞI DEİZCİLİK MİKRODEETLEYİCİ-6 Ankara, 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
T.C. MİLLİ EĞİTİM BAKALIĞI DEİZCİLİK MİKRODEETLEYİCİ-6 Ankara, 2013 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer alan yeterlikleri kazandırmaya yönelik
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MÜREKKEP PÜSKÜRTMELİ YAZICI HAREKET VE KONTROL SİSTEMİ 523EO0041 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ MÜREKKEP PÜSKÜRTMELİ YAZICI HAREKET VE KONTROL SİSTEMİ 523EO0041 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan
17. ÜNİTE TRANSFORMATÖRLER
 17. ÜNİTE TRANSFORMATÖRLER KONULAR 1. ÇALIŞMA PRENSİBİ VE SEMBOLLERİ 2. TRANSFORMATÖRLERİN YAPISI VE ÇEŞİTLERİ 17.1 ÇALIŞMA PRENSİBİ VE SEMBOLLERİ Transformatörler, elektromanyetik indüksiyonla enerjiyi
17. ÜNİTE TRANSFORMATÖRLER KONULAR 1. ÇALIŞMA PRENSİBİ VE SEMBOLLERİ 2. TRANSFORMATÖRLERİN YAPISI VE ÇEŞİTLERİ 17.1 ÇALIŞMA PRENSİBİ VE SEMBOLLERİ Transformatörler, elektromanyetik indüksiyonla enerjiyi
ELEKTRİK- ELEKTRONİK TEMEL UYGULAMALARI DERSİ
 ELEKTRİK- ELEKTRONİK TEMEL UYGULAMALARI DERSİ Dersin Modülleri Temel Elektrik-Elektronik Devre Çizimleri Temel Elektrik-Elektronik Devreler Temel Elektrik Bağlantıları Elektriksel Ölçme Temel Elektrik-Elektronik
ELEKTRİK- ELEKTRONİK TEMEL UYGULAMALARI DERSİ Dersin Modülleri Temel Elektrik-Elektronik Devre Çizimleri Temel Elektrik-Elektronik Devreler Temel Elektrik Bağlantıları Elektriksel Ölçme Temel Elektrik-Elektronik
ÜNİTE 5 TEST SORU BANKASI (TEMEL ELEKTRONİK)
") ÜNİTE 5 TEST SORU BANKASI (TEMEL ELEKTRONİK) TRAFO SORULARI Transformatörün üç ana fonksiyonundan aşağıdakilerden hangisi yanlıştır? a) Gerilimi veya akımı düşürmek ya da yükseltmek b) Empedans uygulaştırmak
ÜNİTE 5 TEST SORU BANKASI (TEMEL ELEKTRONİK) TRAFO SORULARI Transformatörün üç ana fonksiyonundan aşağıdakilerden hangisi yanlıştır? a) Gerilimi veya akımı düşürmek ya da yükseltmek b) Empedans uygulaştırmak
Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır.
 ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
ASENKRON MOTORLARDA HIZ AYARI ve FRENLEME Haftanın Amacı: Asenkron motorun hız ayar ve frenleme tekniklerinin kavranmasıdır. Giriş Bilindiği üzere asenkron motorun rotor hızı, döner alan hızını (n s )
Elektromekanik Kumanda Sistemleri / Ders Notları
 10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
G1-M1 (Koruma Rölesi)
") G1-M1 (Koruma Rölesi) G1 ve M1 serisi koruma rölelerinin basit bir şekilde tanımlanması G1 ve M1 serisi Koruma röleleri, elektriksel değerleri ölçen ve arızaları algılayan bir otomasyon cihazıdır. Yenilenen
G1-M1 (Koruma Rölesi) G1 ve M1 serisi koruma rölelerinin basit bir şekilde tanımlanması G1 ve M1 serisi Koruma röleleri, elektriksel değerleri ölçen ve arızaları algılayan bir otomasyon cihazıdır. Yenilenen
Mikrodenetleyici Eğitim seti
 DENEY 10. STEP (ADIMLI) MOTOR KONTROLU DENEYİ AMAÇ 1) Adımlı-motorun kontrolünü öğretmek, 2) Bir Adımlı-motorun maksimum dönme hızını göstermek. GEREKLİ MALZEME (1) Beti Eğitim Sistemi, (1) Adım motor
DENEY 10. STEP (ADIMLI) MOTOR KONTROLU DENEYİ AMAÇ 1) Adımlı-motorun kontrolünü öğretmek, 2) Bir Adımlı-motorun maksimum dönme hızını göstermek. GEREKLİ MALZEME (1) Beti Eğitim Sistemi, (1) Adım motor
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU
 5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
DERS BİLGİ FORMU ASENKRON VE SENKRON MAKİNALAR ELEKTRİK VE ENERJİ. Okul Eğitimi Süresi
 DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI) DERS BİLGİ
DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI) DERS BİLGİ
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
Haftalık Ders Saati Okul Eğitimi Süresi
 DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
DERSİN ADI BÖLÜM PROGRAM DÖNEMİ DERSİN DİLİ DERS KATEGORİSİ ÖN ŞARTLAR SÜRE VE DAĞILIMI KREDİ DERSİN AMACI ÖĞRENME ÇIKTILARI VE YETERLİKLER DERSİN İÇERİĞİ VE DAĞILIMI (MODÜLLER VE HAFTALARA GÖRE DAĞILIMI)
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
8 Asenkron Motorlar (Induction Motors)
") 8 Asenkron Motorlar (Induction Motors) Önemli Konu Başlıkları *Dengeli üç fazlı büyüklüklerin uzay vektörünün davranışları *Döner manyetik akının oluşumu *Kaymanın oluşumu (ASM un çalışma prensibi) *Kaymanın
8 Asenkron Motorlar (Induction Motors) Önemli Konu Başlıkları *Dengeli üç fazlı büyüklüklerin uzay vektörünün davranışları *Döner manyetik akının oluşumu *Kaymanın oluşumu (ASM un çalışma prensibi) *Kaymanın
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
YÜRÜYEN MERDİVEN/YOL VE VİNÇ SİSTEMLERİ
 YÜRÜYEN MERDİVEN/YOL VE VİNÇ SİSTEMLERİ Dersin Modülleri Step Motor ve Sürülmesi Yürüyen Merdiven ve Yol Makine Dairesi Vincin Makine Aksamı Yürüyen Merdiven ve Yol Kontakları Yürüyen Merdiven ve Yol İç
YÜRÜYEN MERDİVEN/YOL VE VİNÇ SİSTEMLERİ Dersin Modülleri Step Motor ve Sürülmesi Yürüyen Merdiven ve Yol Makine Dairesi Vincin Makine Aksamı Yürüyen Merdiven ve Yol Kontakları Yürüyen Merdiven ve Yol İç
1. BİR FAZLI ASENKRON MOTORLAR
 1. BİR FAZLI ASENKRON MOTORLAR Bir fazlı yardımcı sargılı motorlar Üniversal motorlar 1.1. Bir fazlı yardımcı sargılı motorlar 1.1.3. Yardımcı Sargıyı Devreden Ayırma Nedenleri Motorun ilk kalkınması anında
1. BİR FAZLI ASENKRON MOTORLAR Bir fazlı yardımcı sargılı motorlar Üniversal motorlar 1.1. Bir fazlı yardımcı sargılı motorlar 1.1.3. Yardımcı Sargıyı Devreden Ayırma Nedenleri Motorun ilk kalkınması anında
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
MULTIMATIC KURULUM VE ÇALIŞTIRMA KİTAPÇIĞI
 MULTIMATIC KURULUM VE ÇALIŞTIRMA KİTAPÇIĞI KONTROL PANELİ ÖZELLİKLERİ 1 5 2 6 7 8 3 4 1. LCD ekran çalışma esnasında basıncı gösterir. 2. Manual START / STOP butonları. (Otomatik modda etkisizdir). 3.
MULTIMATIC KURULUM VE ÇALIŞTIRMA KİTAPÇIĞI KONTROL PANELİ ÖZELLİKLERİ 1 5 2 6 7 8 3 4 1. LCD ekran çalışma esnasında basıncı gösterir. 2. Manual START / STOP butonları. (Otomatik modda etkisizdir). 3.
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL Optik Sensörler Üzerine düşen ışığa bağlı olarak üstünden geçen akımı değiştiren elemanlara optik eleman denir. Optik transdüserler ışık miktarındaki değişmeleri elektriksel
Sensörler Yrd.Doç.Dr. İlker ÜNAL Optik Sensörler Üzerine düşen ışığa bağlı olarak üstünden geçen akımı değiştiren elemanlara optik eleman denir. Optik transdüserler ışık miktarındaki değişmeleri elektriksel
SENKRON MAKİNA DENEYLERİ
 DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
ZM-2H606 İki Faz Step. Motor Sürücüsü. Özet
 ZM-2H606 İki Faz Step Motor Sürücüsü Özet ZM-2H606 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
ZM-2H606 İki Faz Step Motor Sürücüsü Özet ZM-2H606 iki faz, 4,6 ve 8 telli step motorlar için üretilmiştir. Yüksek frekanslı giriş sinyallerini kabul edebilecek şekilde donatılmıştır. Akım kararlılığı,
RÖLELER Ufak güçteki elektromanyetik anahtarlara röle adı verilir. Röleler elektromıknatıs, palet ve kontaklar olmak üzere üç kısımdan oluşur.
 BÖLÜM-5 RÖLELER 1 RÖLELER Ufak güçteki elektromanyetik anahtarlara röle adı verilir. Röleler elektromıknatıs, palet ve kontaklar olmak üzere üç kısımdan oluşur. Elektromıknatıs, demir nüve ve üzerine sarılmış
BÖLÜM-5 RÖLELER 1 RÖLELER Ufak güçteki elektromanyetik anahtarlara röle adı verilir. Röleler elektromıknatıs, palet ve kontaklar olmak üzere üç kısımdan oluşur. Elektromıknatıs, demir nüve ve üzerine sarılmış
BÖLÜM V TRANSİSTÖRLER
 BÖLÜM V TRANSİSTÖRLER 5.1 GİRİŞ Transistörler, yarıiletkenler bahsinde değinildiği gibi elektroniğin gelişmesinde önemli bir rol oynamaktadır. Transistörün bulunması ile özellikle elektronik haberleşme
BÖLÜM V TRANSİSTÖRLER 5.1 GİRİŞ Transistörler, yarıiletkenler bahsinde değinildiği gibi elektroniğin gelişmesinde önemli bir rol oynamaktadır. Transistörün bulunması ile özellikle elektronik haberleşme
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren