İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
|
|
|
- Hazan Sözen
- 10 yıl önce
- İzleme sayısı:
Transkript
1 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı
2 BÖLÜM 4 Motor Denetimi
3 Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik aygıtlardır. Motor iki kısımdan oluşur, sabit kısım elektromıknatıs olan stator ve hareketli kısım sabit mıknatıs olan rotordur. Statorda yer alan kutup sargılarına uygun sırada verilen vurular sabit mıknatıs olan rotorun üretim sırasında belirlenmiş adım kadar hareket etmesini sağlar. Adım Motorun Kesiti

4 Adım Motorunun Yapısı Statörde birden fazala kutup yer alır, her kutup üzerinda birden fazla iz yapılabilir bu izlerin hepsi aynı kutba N veya S mıknatışlanır. Rotorda kutuplarda yer alan her ize karşılık bir şerit mıknatıs karşılık gelir. Şerit mıknatıslar bir N bir S olacak şekilde yan yana dizilir ve sıkıca paketlenir. Bu izlerin genişliği adım motorunun bir adımda tarayacağı açıyı belirler. Adım motorları aralığında üretilirler. Unipolar, Bipolar ve Değişken Relüktanslı olmak üzere 3 değişik türü vardır.


5 Adım Motoru Neden Kullanılır Avantajları Dönme açısı girişine uygulanan vuru ile doğru orantılı olarak değişir. Sargılar enerjili olduğu sürece motor tam torktadır. Hassas hareket edebilir, hata oranı bir adımın %3-5 değerindedir. Bir sonraki adıma bu hata aktarılmaz. Başlatmaya durdurmaya ve ters döndürmeye hızlı yanıt verir. Fırça kullanılmadığı için tamir bakım gerektirmeden yıllarca kullanılabilir. Açık döngü denetimi yeterli olduğu için denetim devresi basit ve ucuzdur. Doğrudan motor miline bağlanmış yüklerde bile çok yavaş hızlarda doğru çalışabilir. Dezavantajları Yüksek hızlarda kullanılamaz Denetimi düzgün yapılmadığında rezonansa girer.

6 Bipolar, VR ve Unipolar Adım Motorları Bipolar motorlarda iki adet sargı bulunur ve 4 uçludurlar, sargılar üzerinden iki yönde akım geçer. VR adım motorları Asenkron motora benzer ve 3 adet sargısı vardır, sargılar üzerinde çift yönlü akım geçer, rotorun pozisyonu bir sonraki hareket için önemlidir. Unipolar adım motorları 4 adet sargıdan oluşur. Sargılardan tek yönde akım geçer. Bipolar VR Unipolar

7 Adım Motorun Sürülmesi Unipolar Adım motorunun Sürülmesi A1 A3 B1 B3 A2/B2 1 GND GND + 2 GND GND + 3 GND GND + 4 GND GND + Bipolar Adım motorunun Sürülmesi A1 A3 B1 B3 1 GND + + GND 2 GND + GND GND GND GND + GND


8 5, 6 ve 8 uçlu unipolar motor motor bağlantıları

9 ULN2003 ile Unipolar Step Motorun Sürülmesi

10 L293D ile Step Motorun Sürülmesi


11 2803 ile Sürücü Devresi I N 0 I N 1 I N 2 I N 3 I N 4 I N 5 I N 6 I N 7 +V R6 R7 R8 R9 R 10 R 11 R 12 R 13 4K7 1 4K7 2 4K7 3 4K7 4 4K7 5 4K7 6 4K7 7 4K ULN2803 U3 I N 1 OU T 1 I N 2 OU T 2 I N 3 OU T 3 I N 4 OU T 4 I N 5 OU T 5 I N 6 OU T 6 I N 7 OU T 7 I N 8 OU T 8 D I OD E K 0 0 K 0 1 K 0 2 K 0 3 K 0 4 K 0 5 K 0 6 K 0 7 ULN2803 ULN 2803

12

13 Tam Adımda Motor Hareketi Adım Sargı 4 Sargı 3 Sargı 2 Sargı 1 Motor Hareketi a.1 İletimde Kesimde Kesimde Kesimde a.2 Kesimde İletimde Kesimde Kesimde a.3 Kesimde Kesimde İletimde Kesimde a.4 Kesimde Kesimde Kesimde İletimde


14 Tam Adım çalışma

15 Yarım Adım

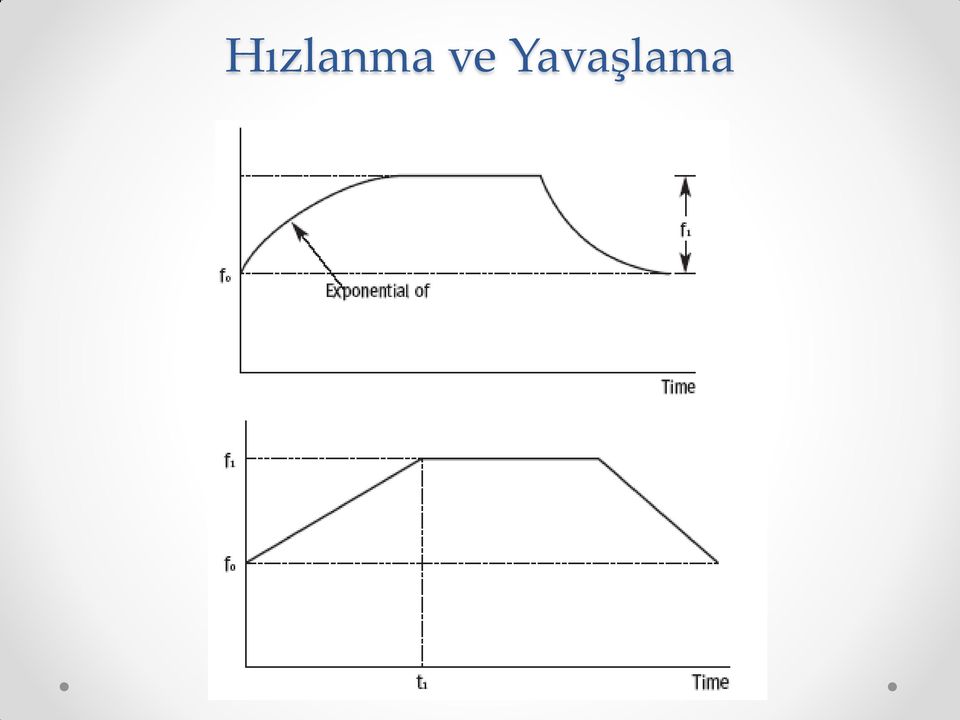
16 Hızlanma ve Yavaşlama
17 Deney 10 Adım motoru denetimi 1. Unipolar adım motoru bağlantısını ULN2803 Transistör paketini kullanarak yapın ve tam ve yarım adım örnek programları yazarak çalıştırın. 2. Tuş takımından 1 tuşunu arttırma 2 tuşunu eksiltme tuşu olarak kullanan programı yazın ve çalıştırın tuşunu her basmada motorun yönünü değiştiren işlevi adım 2 e ekleyin ve programını yazarak çalıştırın. 4. Zamanlayıcıyı zaman geciktirme amacıyla kesmeli modda kullanan programı adım 3 te değiştirmeleri yaparak çalıştırın. 5. Dış kesme kaynağı 0 girişini motorun yön değiştirme girişi olarak kullanan programı yazarak çalıştırın.

18 PWM ile Fırçalı DC Motorun Hız Denetimi

19 PWM ile Motor Denetimi P1.0 Mantık 1 MOSFED Sürücüsü MOSFED Sürücüsü 8051 µc P1.1 P1.2 Mantık 0 Mantık 0 MOSFED Sürücüsü Moto r MOSFED Sürücüsü P1.3


20 Köprü Tipi Sürücü ile Motor Hız Denetimi

21 Optik Algılayıcı ile Geri besleme

22 Akım Geri besleme ile kapalı döngü motor denetimi 8051 ADC PX.Y
23 L293 ile motor denetimi
24 L293 ile kapalı döngü motor hız denetimi

25 Röle ve Röle Bağlantısı

26 Optik Yalıtım

27 Servo Motor

28
29
30 Deney 11: PWM ile DA Motor Denetimi 1. Güç elektroniği setinizi kullanarak kapalı çevrim DA motor denetim devresini kurarak PWM ile hız denetim işlemini yapan programı yazıp çalıştırın. 2. Devir sayısı LCD göstergede görüntülensin tuşu ile hız artsın, 2 tuşu ile azalsın 3 tuşu ile motor yönünü değiştirsin.
31 Gelişmiş Sayıcı Birimleri - PCA Programlanabilir Sayıcı Dizisi (PCA) birimi, MİB den bağımsız olarak daha fazla zamanlama işlevleri sunma için tasarlanmıştır. PCA kullanılarak daha az kodla daha hassas zamanlama yapılabilir. PCA, 5 adet karşılaştırıcı/yakalayıcı birim dizisini besleyen bir zamanlayıcı/sayıcı ünitesinden meydana gelir PCA Birimi 16-bit sayıcı 16-bit Modül-0 16-bit Modül-1 16-bit Modül-2 16-bit Modül-3 Harici G/Ç Ucu P1.2/ECI P1.3/CEX0 P1.4/CEX1 P1.5/CEX2 P1.6/CEX3
32 Gelişmiş Sayıcı Birimleri - PCA PCA biriminin ayrıntılı blok diyagramı Fclk perip/5 PCA Modüllere Bağlantı Fclk perip/2 T0 OVF P1.2 CH CL 16 Bit Aşağı/Yukarı Sayıcı Taşma It CIDL WDTE CPS1 CPSO ECF CMOD 0xD9 IDE CF CR CCF4 CCF3 CCF2 CCF1 CCF0 CCON 0xD8
33 PCA Modülleri: Gelişmiş Sayıcı Birimleri - PCA 16-bit Yakalama, pozitif-kenar tetiklemeli 16-bit Yakalama, negatif-kenar tetiklemeli 16-bit Yakalama, hem pozitif-kenar hem de negatif-kenar tetiklemeli 16-bit Yazılım Zamanlayıcısı 16-bit yüksek hızlı çıkış 8-bit Darbe Genişlik Üreteci
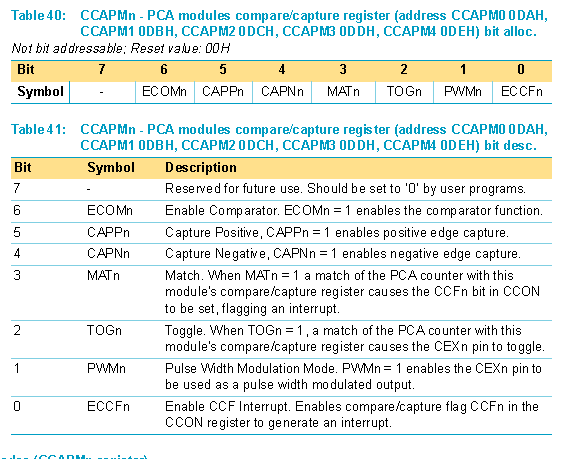
34 Gelişmiş Sayıcı Birimleri - PWM Bütün PCA modülleri PWM (Pulse Width Modulator) çıkışı olarak kullanılabilir. PWM çıkış frekansı, CA zamanlayıcının kaynağına bağlıdır. Taşma CCAPnH CCAPnL Yetki 8 Bit Karşılaştırıcı 0 CEXn CL 1 PCA Zamanlayıcı/Sayıcı ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn CCAPMn n=0-4 DAH - DEH
35 Gelişmiş Sayıcı Birimleri Kısır Döngü Sayacı Kısır Döngü Sayacı (KDS) sistem güvenilirliğini arttırmak için kullanılır. KDS gürültü, güç parazitleri ve elektrostatik deşarj tehlikelerine karşı açık sistemler için oldukça yararlıdır. Modül-4 kısır-döngü sayacı olarak ayarlanabilecek tek PCA modülüdür. CCAPnH yazma ucu CCAPnL yazma ucu Reset CF CR CCAPnH CCAPnL CCF4 CCF3 CCF2 CCF1 CCF0 CCON D8H PCA IT 1 0 Yetki 16 Bit Karşılaştırıcı Eşit CH CL PCA Zamanlayıcı/Sayıcı RESET ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn CCAPMn n=0-4 DAH - DEH CIDL WDTE CPS1 CPS0 ECF CMOD D9H
36 PCA ile PWM
37
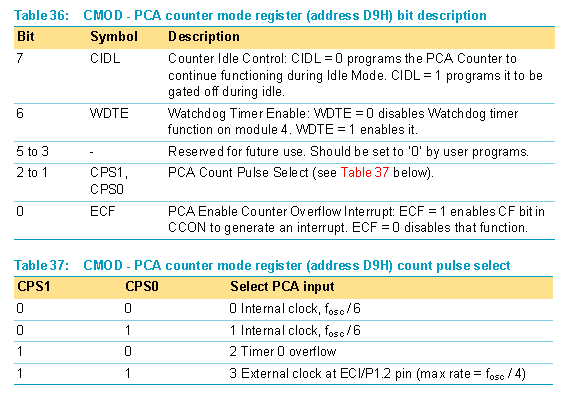
38 CMOD
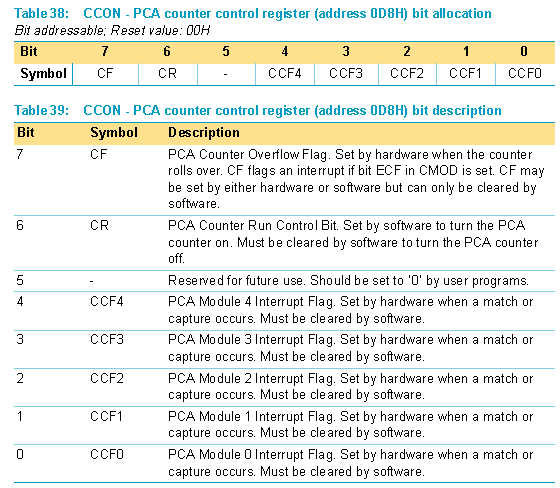
39 CCON
40

41
42
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
3. ELEKTRİK MOTORLARI
 3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
DENEY 21 IC Zamanlayıcı Devre
 DENEY 21 IC Zamanlayıcı Devre DENEYİN AMACI 1. IC zamanlayıcı NE555 in çalışmasını öğrenmek. 2. 555 multivibratörlerinin çalışma ve yapılarını öğrenmek. 3. IC zamanlayıcı anahtar devresi yapmak. GİRİŞ
DENEY 21 IC Zamanlayıcı Devre DENEYİN AMACI 1. IC zamanlayıcı NE555 in çalışmasını öğrenmek. 2. 555 multivibratörlerinin çalışma ve yapılarını öğrenmek. 3. IC zamanlayıcı anahtar devresi yapmak. GİRİŞ
Şekil1. Geri besleme eleman türleri
 HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
Şekil 3-1 Ses ve PWM işaretleri arasındaki ilişki
 DARBE GENİŞLİK MÖDÜLATÖRLERİ (PWM) (3.DENEY) DENEY NO : 3 DENEY ADI : Darbe Genişlik Modülatörleri (PWM) DENEYİN AMACI : µa741 kullanarak bir darbe genişlik modülatörünün gerçekleştirilmesi.lm555 in karakteristiklerinin
DARBE GENİŞLİK MÖDÜLATÖRLERİ (PWM) (3.DENEY) DENEY NO : 3 DENEY ADI : Darbe Genişlik Modülatörleri (PWM) DENEYİN AMACI : µa741 kullanarak bir darbe genişlik modülatörünün gerçekleştirilmesi.lm555 in karakteristiklerinin
Elektrik Motorları ve Sürücüleri
 Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Robot Bilimi. Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI. r1.0
 Öğr. Gör. M. Ozan AKI. r1.0") Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
SÜLEYMAN DEMİREL ÜNİVERSİTESİ
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Elektronik ve Bilgisayar Eğitimi Bölümü Elektrik Makinaları Projenin Adı : DC Servo Motor Hazırlayanın : Adı : Alper Soyadı : KIZIL Numarası : 0011703006
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Elektronik ve Bilgisayar Eğitimi Bölümü Elektrik Makinaları Projenin Adı : DC Servo Motor Hazırlayanın : Adı : Alper Soyadı : KIZIL Numarası : 0011703006
Servo Motor. Servo Motorların Kullanıldığı Yerler
 Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1
 Yazar: Yrd. Doç. Dr. Mustafa Turan S1") ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
Doğru Akım Motorları
 08.05.2012 Doğru Akım Motorları Yrd. Doç. Dr. Aytaç Gören İçerik Doğru Akım Elektrik Motorları Doğru Akım Motorlarının Kısımları ve Özellikleri Güç Hesabı Adım (Step) Motorlar Servo Motorlar Lineer Servo
08.05.2012 Doğru Akım Motorları Yrd. Doç. Dr. Aytaç Gören İçerik Doğru Akım Elektrik Motorları Doğru Akım Motorlarının Kısımları ve Özellikleri Güç Hesabı Adım (Step) Motorlar Servo Motorlar Lineer Servo
Fatih Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü EEM 316 Haberleşme I LAB SINAVI DARBE GENLİK MODÜLASYONU (PWM)
") Fatih Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü EEM 316 Haberleşme I LAB SINAVI DARBE GENLİK MODÜLASYONU (PWM) 9.1 Amaçlar 1. µa741 ile PWM modülatör kurulması. 2. LM555 in çalışma prensiplerinin
Fatih Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü EEM 316 Haberleşme I LAB SINAVI DARBE GENLİK MODÜLASYONU (PWM) 9.1 Amaçlar 1. µa741 ile PWM modülatör kurulması. 2. LM555 in çalışma prensiplerinin
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA
 A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA İÇİNDEKİLER Sayaçlar Elektrik Sayaçları ELEKTRİK SAYAÇLARI Elektrik alıcılarının gücünü ölçen aygıt wattmetre, elektrik alıcılarının yaptığı
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü ÖLÇME TEKNİĞİ 11. HAFTA İÇİNDEKİLER Sayaçlar Elektrik Sayaçları ELEKTRİK SAYAÇLARI Elektrik alıcılarının gücünü ölçen aygıt wattmetre, elektrik alıcılarının yaptığı
4-Deney seti modüler yapıya sahiptir ve kabin içerisine tek bir board halinde monte edilmiştir.
 MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
MDS 8051 8051 AİLESİ DENEY SETİ 8051 Ailesi Deney Seti ile piyasada yaygın olarak bulunan 8051 ailesi mikro denetleyicileri çok kolay ve hızlı bir şekilde PC nizin USB veya Seri portundan gönderdiğiniz
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 3 LCD Gösterge Kullanımı +5 LCD Modülün Bağlantısı 8K2 1K +5 10 P0.5 P0.6 P0.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 1 2 3
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 3 LCD Gösterge Kullanımı +5 LCD Modülün Bağlantısı 8K2 1K +5 10 P0.5 P0.6 P0.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 1 2 3
3. Bölüm: Asenkron Motorlar. Doç. Dr. Ersan KABALCI
 3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
3. Bölüm: Asenkron Motorlar Doç. Dr. Ersan KABALCI 1 3.1. Asenkron Makinelere Giriş Düşük ve orta güç aralığında günümüzde en yaygın kullanılan motor tipidir. Yapısal olarak çeşitli çalışma koşullarında
Mikroişlemcili Sistemler ve Laboratuvarı
 SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Zamanlayıcılar ve Sayıcılar Doç.Dr. Ahmet Turan ÖZCERİT Doç.Dr. Cüneyt
SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Zamanlayıcılar ve Sayıcılar Doç.Dr. Ahmet Turan ÖZCERİT Doç.Dr. Cüneyt
Adım Motoru: açıya adım. Şekil 8.2 tekyönlü. Lab 8. Siyah (A) Mavi ( B ) Kırmızı (B)
 Mavi ( B ) Kırmızı (B)") 446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
446 GÖMÜLÜ SİSTEM TASARIMI Adım Motoru 8.1 Amaç Bu laboratuvarda LauchPad a dışarıdan bağlanacak adım motorunun dönme yönünü ve hızını kontrol eden programın yazılımı verilecektir. 8.2 Gerekli Malzeme
EEM 419-Mikroişlemciler Güz 2017
 EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
EEM 419-Mikroişlemciler Güz 2017 Katalog Bilgisi : EEM 419 Mikroişlemciler (3+2) 4 Bir mikroişlemci kullanarak mikrobilgisayar tasarımı. Giriş/Çıkış ve direk hafıza erişimi. Paralel ve seri iletişim ve
UYGULAMA 1 24V START CPU V LO. Verilen PLC bağlantısına göre; START butonuna basıldığında Q0.0 çıkışını aktif yapan PLC programını yazınız.
 UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna
Donanım İÇERİK. Bölüm 1:FATEK FBs PLC Serisine Genel Bakış. Bölüm 2:Sistem Mimarisi
 Donanım İÇERİK Bölüm 1:FATEK FBs PLC Serisine Genel Bakış 1.1 Ana Ünitenin Görünümü... H1-1 1.2 Genişleme Modülünün Görünümü... H1-2 1.3 Haberleşme Modülünün Görünümü... H1-4 1.4 FBS-PLC Modellerinin Listesi...
Donanım İÇERİK Bölüm 1:FATEK FBs PLC Serisine Genel Bakış 1.1 Ana Ünitenin Görünümü... H1-1 1.2 Genişleme Modülünün Görünümü... H1-2 1.3 Haberleşme Modülünün Görünümü... H1-4 1.4 FBS-PLC Modellerinin Listesi...
MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 5 Zamanlayıcılar Zamanlayıcı/Sayıcı 3 Zamanlayıcı/Sayıcı Zamanlayıcı: Zaman geciktirici olarak kullanıldığında verilen isim. Sayıcı:
MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 5 Zamanlayıcılar Zamanlayıcı/Sayıcı 3 Zamanlayıcı/Sayıcı Zamanlayıcı: Zaman geciktirici olarak kullanıldığında verilen isim. Sayıcı:
DENEY 2- Sayıcılar ve Kaydırmalı Kaydediciler
 DENEY 2- Sayıcılar ve Kaydırmalı Kaydediciler DENEY 2a- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL
DENEY 2- Sayıcılar ve Kaydırmalı Kaydediciler DENEY 2a- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL
BÖLÜM 13 ROTORU SARGILI VE ÇĐFT DEVĐRLĐ MOTORLARIN KUMANDASI. Örnek 1 : Üç kademeli dirençle rotoru sargılı motora yol vermenin programlanması.
 BÖLÜM 3 OOU AGILI VE ÇĐF DEVĐLĐ MOOLA KUMANDAI 3. - otoru sargılı motorların çalıştırılması : Örnek : Üç kademeli dirençle rotoru sargılı motora yol vermenin programlanması. e 2 C () C 4 () C 3 () C 2
BÖLÜM 3 OOU AGILI VE ÇĐF DEVĐLĐ MOOLA KUMANDAI 3. - otoru sargılı motorların çalıştırılması : Örnek : Üç kademeli dirençle rotoru sargılı motora yol vermenin programlanması. e 2 C () C 4 () C 3 () C 2
3 FAZLI ASENKRON MOTORLAR
 3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
FRENIC MULTİ ÖZET KULLANIM KLAVUZU
 FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI
 DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü. Doğru Akım Makinaları - I
 KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü 1. Deneyin Adı Doğru Akım Makinaları 2. Deneyi Amacı Doğru akım motorunun yük eğrilerinin elde edilmesi 3. Deneye
KARADENİZ TEKNİK ÜNİVERSİTESİ Of Teknoloji Fakültesi Enerji Sistemleri Mühendisliği Bölümü 1. Deneyin Adı Doğru Akım Makinaları 2. Deneyi Amacı Doğru akım motorunun yük eğrilerinin elde edilmesi 3. Deneye
SRV2 +2 FONKSİYON. Servo Motor Eğitim Seti. Tamamen mekatronik özel tasarım. Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin
 SRV2 Servo Motor Eğitim Seti Tamamen mekatronik özel tasarım Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin %100 kendi imalatımız +2 FONKSİYON Pnömatik 2.eksen Vakumlu Parça Tutma Eğitim Seti
SRV2 Servo Motor Eğitim Seti Tamamen mekatronik özel tasarım Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin %100 kendi imalatımız +2 FONKSİYON Pnömatik 2.eksen Vakumlu Parça Tutma Eğitim Seti
BÖLÜM 1: MİKRODENETLEYİCİLER
 V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
V İÇİNDEKİLER BÖLÜM 1: MİKRODENETLEYİCİLER ve PIC16F877A... 13 1.1 Giriş... 13 1.2 Mikrochip Mikrodenetleyici Ailesi... 14 1.2.1 PIC12CXXX/PIC12FXXX Ailesi... 15 1.2.2 PIC16C5X Ailesi... 15 1.2.3 PIC16CXXX/PIC16FXXX
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri)
") KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
ÜÇ-FAZLI TAM DALGA YARI KONTROLLÜ DOĞRULTUCU VE ÜÇ-FAZLI EVİRİCİ
 KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Güç Elektroniği Uygulamaları ÜÇ-FAZLI TAM DALGA YARI KONTROLLÜ DOĞRULTUCU VE ÜÇ-FAZLI EVİRİCİ Hazırlık Soruları
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Güç Elektroniği Uygulamaları ÜÇ-FAZLI TAM DALGA YARI KONTROLLÜ DOĞRULTUCU VE ÜÇ-FAZLI EVİRİCİ Hazırlık Soruları
TEKNİK ÖZELLİKLER. Giriş Beslemesi. Giriş besleme voltajı. Motor Çıkışı. Motor gerilimi. Aşırı yük ve kısa devre korumalı.
 1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
1 TEKNİK ÖZELLİKLER Giriş besleme voltajı Maks. güç harcaması Besleme koruması Motor gerilimi Motor çıkış akımı Motor kontrol şekli Motor koruması Encoder tipi Encoder çözünürlüğü Encoder voltajı Kumanda
İçerik. Ürün no.: CSL710-R A/L-M12 Işık perdesi alıcı
 Ürün no.: 50128973 CSL710-R40-2210.A/L-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50128973 CSL710-R40-2210.A/L-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
IR Modülü. Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm
 ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
ÜRÜN KATALOGU IR Modülü Kart Özellikleri Çalısma Frekansı: 38KHz Mesafe: 6 Metre Çalısma Voltajı: 3.3-5V Kart Boyutları: 20 mm x 20 mm Modül üzerinde PIC12F675 mikrodenetleyicisi bulunmaktadır. Vcc pinine
Servus Latince kökenli,
 Servus Latince kökenli, köle anlamına gelmektedir. Servo Mekanizma istenilen gösterge değerlerine göre hareket eden bir kontrol mekanizmasıdır. yüksek kararlılıkta çalışabilmek için çalışma şartlarını
Servus Latince kökenli, köle anlamına gelmektedir. Servo Mekanizma istenilen gösterge değerlerine göre hareket eden bir kontrol mekanizmasıdır. yüksek kararlılıkta çalışabilmek için çalışma şartlarını
yabancı cisim olup olmadığını kontrol edin. Sıcaklık algılama devresi arızalanmış olabilir.
 ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
DC baradaki voltaj çok yükselmiş olabilir. Çıkışlarda bir kısadevre olabilir. bağlantıyı kontrol ediniz. Enkoder hatası olabilir.
 ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama süresi çok düşükse yükseltiniz. Çıkışlarda
ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama süresi çok düşükse yükseltiniz. Çıkışlarda
U-V-W çıkışları ile motor arası bağlantıyı kontrol ediniz. Enkoderi, kablosunu veya bağlantısını kontrol ediniz. Akım algılayıcıyı değiştiriniz.
 ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
ARIZA KODU AÇIKLAMASI ARIZA SEBEBİ ÇÖZÜM ÖNERİLERİ DC baradaki voltaj çok yükselmiş olabilir Çıkışlarda bir kısadevre Çıkışta faz kaybı Firenleme direncinin doğru bir şekilde takıldığını kontrol Yavaşlama
FRENIC MEGA ÖZET KULLANIM KLAVUZU
 FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
DENEY 2- Sayıcılar. 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi.
 DENEY 2- Sayıcılar DENEY 2- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL BİLGİLER Sayıcılar flip-floplar
DENEY 2- Sayıcılar DENEY 2- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL BİLGİLER Sayıcılar flip-floplar
L3 Otomasyon Laboratuvarı
 L3 Laboratuvarı Otomasyon laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Elektrik makinelerinin yapısı, bakımı, kontrolü ve endüstriyel uygulama alanlarını öğrenir. Enerji
L3 Laboratuvarı Otomasyon laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Elektrik makinelerinin yapısı, bakımı, kontrolü ve endüstriyel uygulama alanlarını öğrenir. Enerji
B603 - B603B SERİSİ FREKANS KONTROLLÜ SÜRÜCÜLER KULLANMA KILAVUZU
 B603 - B603B SERİSİ FREKNS KONTROLLÜ SÜRÜCÜLER KULLNM KILUZU İÇERİK Sayfa BĞLNTI E KULLNIM BİLGİLERİ... 1 1.0 Elektriksel bağlantılar... 1 1.1 na terminal... 1 1.2 Kontrol devresi bağlantıları... 1 2.0
B603 - B603B SERİSİ FREKNS KONTROLLÜ SÜRÜCÜLER KULLNM KILUZU İÇERİK Sayfa BĞLNTI E KULLNIM BİLGİLERİ... 1 1.0 Elektriksel bağlantılar... 1 1.1 na terminal... 1 1.2 Kontrol devresi bağlantıları... 1 2.0
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ RÜZGAR GÜCÜ İLE ELEKTRİK ÜRETİMİ 4. HAFTA 1 İçindekiler Rüzgar Türbini Çalışma Karakteristiği
RedoMayer Makina ve Otomasyon
 RedoMayer Makina ve Otomasyon >Robotik Sistemler >PLC ve modülleri >Operatör Panelleri >Servo Motor ve Sürücüleri >Redüktörler >Encoderler www.redomayer.com RedoMayer Makina ve Otomasyon, 20 yılı aşan
RedoMayer Makina ve Otomasyon >Robotik Sistemler >PLC ve modülleri >Operatör Panelleri >Servo Motor ve Sürücüleri >Redüktörler >Encoderler www.redomayer.com RedoMayer Makina ve Otomasyon, 20 yılı aşan
L300P GÜÇ BAĞLANTISI BAĞLANTI TERMİNALLERİ
 L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 Giriş/Çıkış Portlarının Kullanımı 8051 in Portları 8051 in çift yönlü çalışabilen 4 adet 8 hatlı portu vardır. Her porta SFR
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 Giriş/Çıkış Portlarının Kullanımı 8051 in Portları 8051 in çift yönlü çalışabilen 4 adet 8 hatlı portu vardır. Her porta SFR
Bir motorun iç yapısı çok farklı gözükse bile, motorun uç davranışını bu iki türün birisi cinsinden tanımlamak her zaman mümkündür.
 K TÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemciler Laboratuarı ADIM MOTORUNUN MĐKROBĐLGĐSAYARLARLA DENETĐMĐ 1. GENEL TANITIM Adım motorları, küçük momentli sayısal uygulamalarda
K TÜ Mühendislik Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemciler Laboratuarı ADIM MOTORUNUN MĐKROBĐLGĐSAYARLARLA DENETĐMĐ 1. GENEL TANITIM Adım motorları, küçük momentli sayısal uygulamalarda
İçerik. Ürün no.: PRK25C.A/4P-200-M12 Reflektörden yansımalı fotoelektrik sensör kutuplu
 Ürün no.: 50134274 PRK25C.A/4P-200-M12 Reflektörden yansımalı fotoelektrik sensör Şekil farklılık gösterebilir İçerik Teknik veriler Reflektörler ve yansıtıcı bantlar Boyutlandırılmış çizimler Elektrik
Ürün no.: 50134274 PRK25C.A/4P-200-M12 Reflektörden yansımalı fotoelektrik sensör Şekil farklılık gösterebilir İçerik Teknik veriler Reflektörler ve yansıtıcı bantlar Boyutlandırılmış çizimler Elektrik
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
SABİT MIKNATISLI SENKRON MOTOR
 SABİT MIKNATISLI SENKRON MOTOR ÜRÜN GÖSTERİMİ TEKNİK YENİLİK ANA KARAKTERİSTİĞİ Yüksek Verim ve Enerji Tasarrufu Küçük Boyutlu ve Daha Düşük Bir Kütle Yüksek Performans Yüksek Sorumluluk Güçlü Yapı Kontrolü
SABİT MIKNATISLI SENKRON MOTOR ÜRÜN GÖSTERİMİ TEKNİK YENİLİK ANA KARAKTERİSTİĞİ Yüksek Verim ve Enerji Tasarrufu Küçük Boyutlu ve Daha Düşük Bir Kütle Yüksek Performans Yüksek Sorumluluk Güçlü Yapı Kontrolü
STP1 +2 FONKSİYON. Step Motor Eğitim Seti. Tamamen mekatronik özel tasarım. Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin
 STP1 Step Motor Eğitim Seti Tamamen mekatronik özel tasarım %100 kendi imalatımız Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin +2 FONKSİYON Konum göstrge cetveli 24V PLC kontrollü lazer pointer
STP1 Step Motor Eğitim Seti Tamamen mekatronik özel tasarım %100 kendi imalatımız Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin +2 FONKSİYON Konum göstrge cetveli 24V PLC kontrollü lazer pointer
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü
 DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
Adres Yolu (Address Bus) Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması
 Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması") MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1
 6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
6. DİJİTAL / ANALOG VE ANALOG /DİJİTAL ÇEVİRİCİLER 1 Günümüzde kullanılan elektronik kontrol üniteleri analog ve dijital elektronik düzenlerinin birleşimi ile gerçekleşir. Gerilim, akım, direnç, frekans,
Eyleyiciler. July 2, 2001
 Eyleyiciler July, 001 Contents 1 Giriş 1 1.1 Pnömatik, Hidrolik ve Elektirik eyleyicilerin karşılaştırılması... 1.1.1 Pnömatik Eyleyiciler..................... 1.1. Hidrolik Eyleyiciler......................
Eyleyiciler July, 001 Contents 1 Giriş 1 1.1 Pnömatik, Hidrolik ve Elektirik eyleyicilerin karşılaştırılması... 1.1.1 Pnömatik Eyleyiciler..................... 1.1. Hidrolik Eyleyiciler......................
İçerik. Ürün no.: Set PRK5/4P-M8 + TKS 40x60.A Set reflektörden yansımalı fotoelektrik sensör kutuplu
 Ürün no.: 50133946 Set PRK5/4P-M8 + TKS 40x60.A Set reflektörden yansımalı fotoelektrik sensör kutuplu Şekil farklılık gösterebilir İçerik Teknik veriler Set bundan oluşur Boyutlandırılmış çizimler Elektrik
Ürün no.: 50133946 Set PRK5/4P-M8 + TKS 40x60.A Set reflektörden yansımalı fotoelektrik sensör kutuplu Şekil farklılık gösterebilir İçerik Teknik veriler Set bundan oluşur Boyutlandırılmış çizimler Elektrik
SENKRON MAKİNA DENEYLERİ
 DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
Electric Vehicles- 4 EVs V s 4
 Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Hız-Moment Dönüşüm Mekanizmaları. Vedat Temiz
 Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
Hız-Moment Dönüşüm Mekanizmaları Vedat Temiz Neden hız-moment dönüşümü? 1. Makina için gereken hızlar çoğunlukla standart motorların hızlarından farklıdır. 2. Makina hızının, çalışma sırasında düzenli
İçerik. Ürün no.: ET5I.3/4P Enerjik ışık sensörleri
 Ürün no.: 50127902 ET5I.3/4P Enerjik ışık sensörleri Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Diyagramlar Kumanda ve gösterge Aksesuarlar Uyarılar
Ürün no.: 50127902 ET5I.3/4P Enerjik ışık sensörleri Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Diyagramlar Kumanda ve gösterge Aksesuarlar Uyarılar
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
İÇİNDEKİLER. 1-1 Lojik ve Anahtara Giriş Lojik Kapı Devreleri... 9
 İÇİNDEKİLER BÖLÜM 1 TEMEL LOJİK KAPI DENEYLERİ 1-1 Lojik ve Anahtara Giriş 1 1-2 Lojik Kapı Devreleri... 9 a. Diyot Lojiği (DL) devresi b. Direnç-Transistor Lojiği (RTL) devresi c. Diyot-Transistor Lojiği
İÇİNDEKİLER BÖLÜM 1 TEMEL LOJİK KAPI DENEYLERİ 1-1 Lojik ve Anahtara Giriş 1 1-2 Lojik Kapı Devreleri... 9 a. Diyot Lojiği (DL) devresi b. Direnç-Transistor Lojiği (RTL) devresi c. Diyot-Transistor Lojiği
Temel elektronik laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz;
 L4 Laboratuvarı Temel elektronik laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Temel pasif devre elemanlarını öğrenir. Temel Elektrik-Elektronik büyüklükleri ve elemanların
L4 Laboratuvarı Temel elektronik laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Temel pasif devre elemanlarını öğrenir. Temel Elektrik-Elektronik büyüklükleri ve elemanların
Deney 4: 555 Entegresi Uygulamaları
 Deneyin Amacı: Deney 4: 555 Entegresi Uygulamaları 555 entegresi kullanım alanlarının öğrenilmesi. Uygulama yapılarak pratik kazanılması. A.ÖNBİLGİ LM 555 entegresi; osilasyon, zaman gecikmesi ve darbe
Deneyin Amacı: Deney 4: 555 Entegresi Uygulamaları 555 entegresi kullanım alanlarının öğrenilmesi. Uygulama yapılarak pratik kazanılması. A.ÖNBİLGİ LM 555 entegresi; osilasyon, zaman gecikmesi ve darbe
SAYISAL ELEKTRONİK. Ege Üniversitesi Ege MYO Mekatronik Programı
 SAYISAL ELEKTRONİK Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 6 Tutucular, Flip-Floplar ve Zamanlayıcılar Tutucular (Latches) Tutucu iki kararlı (bistable state) durumu olan en temel sayısal depolama
SAYISAL ELEKTRONİK Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 6 Tutucular, Flip-Floplar ve Zamanlayıcılar Tutucular (Latches) Tutucu iki kararlı (bistable state) durumu olan en temel sayısal depolama
9. MERKEZİ İŞLEM BİRİM MODÜLÜ TASARIMI
 1 9. MERKEZİ İŞLEM BİRİM MODÜLÜ TASARIMI Mikroişlemci temelli sistem donanımının en önemli kısmı merkezi işlem birimi modülüdür. Bu modülü tasarlamak için mikroişlemcinin uç işlevlerinin çok iyi bilinmesi
1 9. MERKEZİ İŞLEM BİRİM MODÜLÜ TASARIMI Mikroişlemci temelli sistem donanımının en önemli kısmı merkezi işlem birimi modülüdür. Bu modülü tasarlamak için mikroişlemcinin uç işlevlerinin çok iyi bilinmesi
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü GÜÇ ELEKTRONİĞİ 3. HAFTA
 A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü GÜÇ ELEKTRONİĞİ 3. HAFTA 1 İçindekiler Tristör Triyak 2 TRİSTÖR Tristörler güç elektroniği devrelerinde hızlı anahtarlama görevinde kullanılan, dört yarı iletken
A.Ü. GAMA MYO. Elektrik ve Enerji Bölümü GÜÇ ELEKTRONİĞİ 3. HAFTA 1 İçindekiler Tristör Triyak 2 TRİSTÖR Tristörler güç elektroniği devrelerinde hızlı anahtarlama görevinde kullanılan, dört yarı iletken
Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu
 Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu 1. Adım : Motor & Sürücü Bağlantılarını Yapınız. 2. Adım : Motor Plaka Değerlerine Bakınız Mentor II nin parametrelerini ayarlamak için, önce motor
Mentor II DC sürücüler için Pratik Devreye Alma Klavuzu 1. Adım : Motor & Sürücü Bağlantılarını Yapınız. 2. Adım : Motor Plaka Değerlerine Bakınız Mentor II nin parametrelerini ayarlamak için, önce motor
ÜÇ FAZLI ASENKRON SİNCAP KAFESLİ TAM KAPALI IEC ELSAN Elektrik San. ve Tic. A.Ş.
 KAT.NMXF.12.11 FRENLİ ELEKTRİK MOTORLARI ÇİFT HIZLI FRENLİ ELEKTRİK MOTORLARI ÜÇ FAZLI ASENKRON SİNCAP KAFESLİ TAM KAPALI IEC 90-200 ELSAN Elektrik San. ve Tic. A.Ş. www.elsanas.com.tr Etiler Mah. 1458.
KAT.NMXF.12.11 FRENLİ ELEKTRİK MOTORLARI ÇİFT HIZLI FRENLİ ELEKTRİK MOTORLARI ÜÇ FAZLI ASENKRON SİNCAP KAFESLİ TAM KAPALI IEC 90-200 ELSAN Elektrik San. ve Tic. A.Ş. www.elsanas.com.tr Etiler Mah. 1458.
ACD BİLGİ İŞLEM ACD KABLOSUZ VERİ TOPLAMA SİSTEMLERİ URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ. URT-V2 Terminallerinin
 ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü
 Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü Dersin Amacı Pnömatik sistemlerde kullanılan elektrik kumanda elemanlarını tanıtmak. Kumanda elemanları ve pnömatik valfleri kullanarak
Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü Dersin Amacı Pnömatik sistemlerde kullanılan elektrik kumanda elemanlarını tanıtmak. Kumanda elemanları ve pnömatik valfleri kullanarak
Unidrive M200, M201 (Boy 1-4) Hızlı Başlangıç Kılavuzu
 Hızlı Başlangıç Kılavuzu") Bu kılavuzun amacı bir motoru çalıştırmak üzere bir sürücünün kurulması için gerekli temel bilgileri sunmaktır. Lütfen www.controltechniques.com/userguides veya www.leroy-somer.com/manuals adresinden indirebileceğiniz
Bu kılavuzun amacı bir motoru çalıştırmak üzere bir sürücünün kurulması için gerekli temel bilgileri sunmaktır. Lütfen www.controltechniques.com/userguides veya www.leroy-somer.com/manuals adresinden indirebileceğiniz
Asenkron Makineler (2/3)
") Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ
 ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
İçerik. Ürün no.: PRK5/4P Reflektörden yansımalı fotoelektrik sensör kutuplu
 Ürün no.: 50117705 PRK5/4P Reflektörden yansımalı fotoelektrik sensör kutuplu Şekil farklılık gösterebilir İçerik Teknik veriler Reflektörler ve yansıtma folyosu Boyutlandırılmış çizimler Elektrik bağlantısı
Ürün no.: 50117705 PRK5/4P Reflektörden yansımalı fotoelektrik sensör kutuplu Şekil farklılık gösterebilir İçerik Teknik veriler Reflektörler ve yansıtma folyosu Boyutlandırılmış çizimler Elektrik bağlantısı
GÜÇ ELEKTRONİĞİ EĞİTİM SETİ DENEY KİTABI KONU: TURN-OFF ZAMANLAYICI DENEYİ. Giriş: Turn-off tipi zamanlayıcı devresi şekil 19.1 de görülmektedir.
 KONU: TURN-OFF ZAMANLAYICI DENEYİ Giriş: Turn-off tipi zamanlayıcı devresi şekil 19.1 de görülmektedir. +Vcc R1 P1 7 3 2 6 D1 R2 Q1 B C1 4 R3 P2 -Vcc Şekil 19.1: Turn-off tipi zamanlayıcı devresi Turn-off
KONU: TURN-OFF ZAMANLAYICI DENEYİ Giriş: Turn-off tipi zamanlayıcı devresi şekil 19.1 de görülmektedir. +Vcc R1 P1 7 3 2 6 D1 R2 Q1 B C1 4 R3 P2 -Vcc Şekil 19.1: Turn-off tipi zamanlayıcı devresi Turn-off
Ad Soyad: Öğrenci No:
 ADUC841 sayma değeri P3.4 (T0) osc E TH0 TL0 MOD Seçimi Taşma (overflow) TMOD 1. Giriş kaynağı kontrol GATE0 C/T0 M1 M0 3. Yenileme modu P3.2 (INT0) 2. Çalışma kontrol TCON TF0 TR0 Zamanlayıcı/Sayıcı-0
ADUC841 sayma değeri P3.4 (T0) osc E TH0 TL0 MOD Seçimi Taşma (overflow) TMOD 1. Giriş kaynağı kontrol GATE0 C/T0 M1 M0 3. Yenileme modu P3.2 (INT0) 2. Çalışma kontrol TCON TF0 TR0 Zamanlayıcı/Sayıcı-0
Yrd.Doç.Dr. Celal Murat KANDEMİR
 Bilgisayar Mimarisi Ara Bağlantı Yapıları ve Bus Kavramı Yrd.Doç.Dr. Celal Murat KANDEMİR ESOGÜ Eğitim Fakültesi - BÖTE twitter.com/cmkandemir Ara Bağlantı Yapıları Bir bilgisayar sistemi MİB, bellek ve
Bilgisayar Mimarisi Ara Bağlantı Yapıları ve Bus Kavramı Yrd.Doç.Dr. Celal Murat KANDEMİR ESOGÜ Eğitim Fakültesi - BÖTE twitter.com/cmkandemir Ara Bağlantı Yapıları Bir bilgisayar sistemi MİB, bellek ve
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI
 EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI 23.02.2015 Yrd.Doç.Dr. Dilşad Engin PLC Ders Notları 2 PROGRAMLANABİLİR DENETLEYİCİLER SIRALI İŞLEMLER İÇİN DRUM CONTROLLER FONKSİYON BLOĞU 23.02.2015 Yrd.Doç.Dr.
EGE ÜNİVERSİTESİ EGE MYO MEKATRONİK PROGRAMI 23.02.2015 Yrd.Doç.Dr. Dilşad Engin PLC Ders Notları 2 PROGRAMLANABİLİR DENETLEYİCİLER SIRALI İŞLEMLER İÇİN DRUM CONTROLLER FONKSİYON BLOĞU 23.02.2015 Yrd.Doç.Dr.
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Bölüm 4 Ardışıl Lojik Devre Deneyleri
 Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
Bölüm 4 Ardışıl Lojik Devre Deneyleri DENEY 4-1 Flip-Floplar DENEYİN AMACI 1. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop
MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ
 MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Mikroişlemciler ve Assembly Dili Ders Saati (T+U+L) Kredi AKTS 4
MİLLİ SAVUNMA ÜNİVERSİTESİ KARA HARP OKULU DEKANLIĞI BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ DERS TANITIM BİLGİLERİ Dersin Adı Kodu Sınıf / Y.Y. Mikroişlemciler ve Assembly Dili Ders Saati (T+U+L) Kredi AKTS 4
idoor Multi Drive Auto Door Controller
 idoor Multi Drive Auto Door Controller DİKKAT! Kullanım talimatlarına uyulmaması durumunda maddi zararlar ve yaralanmalar olabilir. Kapının günlük kullanıma hazır olup olmadığı her sabah mal sahibi tarafından
idoor Multi Drive Auto Door Controller DİKKAT! Kullanım talimatlarına uyulmaması durumunda maddi zararlar ve yaralanmalar olabilir. Kapının günlük kullanıma hazır olup olmadığı her sabah mal sahibi tarafından
2. Bölüm: Rüzgar Enerjisi Dönüşüm Sistemleri ve Yapıları
 2. Bölüm: Rüzgar Enerjisi Dönüşüm Sistemleri ve Yapıları Doç. Dr. Ersan KABALCI AEK-204 Rüzgar Enerjisi ile Elektrik Üretimi 2.1. Rüzgar Enerjisi Dönüşüm Sistemlerine Giriş Rüzgar enerjisinin elektriksel
2. Bölüm: Rüzgar Enerjisi Dönüşüm Sistemleri ve Yapıları Doç. Dr. Ersan KABALCI AEK-204 Rüzgar Enerjisi ile Elektrik Üretimi 2.1. Rüzgar Enerjisi Dönüşüm Sistemlerine Giriş Rüzgar enerjisinin elektriksel
İçerik. Ürün no.: MSI-SR-SM42OS-03 Güvenlik rölesi. Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Devre şeması Uyarılar
 Ürün no.: 50133031 MSI-SR-SM42OS-03 Güvenlik rölesi Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Devre şeması Uyarılar 1 / 5 Teknik veriler Temel veriler
Ürün no.: 50133031 MSI-SR-SM42OS-03 Güvenlik rölesi Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Devre şeması Uyarılar 1 / 5 Teknik veriler Temel veriler
İçerik. Ürün no.: CML730i-R R/CV-M12 Işık perdesi alıcı
 Ürün no.: 50119252 CML730i-R10-960.R/CV-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50119252 CML730i-R10-960.R/CV-M12 Işık perdesi alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar