Robotik AKTUATÖRLER Motorlar: Çalışma prensibi
|
|
|
- Gül Kinali
- 10 yıl önce
- İzleme sayısı:
Transkript
1 Robotik AKTUATÖRLER Motorlar: Çalışma prensibi 1

2 Motorlar: Çalışma prensibi Motorlar: Çalışma prensibi 2

3 Motorlar: Çalışma prensibi AC sinyal kutupları ters çevirir + - AC Motor AC motorun hızı üç değişkene bağlıdır: 1. temel hızı belirleyen sabit olan bobin sayısı (kutup sayısı) 2. AC voltaj hattının frekansı. 3. Toplam uygulanan tork. 3

4 Motorlar: Çalışma prensibi En basit 3 faz motorda, üç ayrı bobinden oluşan üç ayrı elektromagnet bulunur Bobinler motorun sabit dış tarafındadır. Bu bölgeye stator Bobinlerde oluşturulan manyetik alanın değiştirilmesi rotor denilen iç tarafın dönmesine yolaçar. Adım (tepper) Motoru birbirine göre 120 derecelik faz farkı ile yerleştirilmiş her fazdaki voltaj birbirine göre düşer veya artarsa her sargıdaki alan yoğunluğu kutuplara doğru bir kuvvet oluşturur. 4
 Motoru birbirine göre 120 derecelik faz farkı ile yerleştirilmiş her fazdaki voltaj birbirine göre")
5 Adım (tepper) Motoru ürekli bir dönüş için gücün üç bobine de belli bir sırada verilmesi gerekir. aşağıdaki sıralama motoru saat yönünde çevirir. Bobin 1: Bobin 2: Bobin 3: zaman ---> Adım (tepper) Motoru Adım motorları 2 den fazla 6 ve 8 e kadar motoru aktive eden bobinden oluşan terminal içerebilir. Zamanlama motorun hızını belirler. Terminal voltajları arasındaki faz farkı yönü belirler. Bütün bobinlere verilen tek bir sinyal grubu gidilecek en az adım açısını belirler. Verilen ardışıl sinyal sayısı motorun gideceği pozisyonu belirler. Adım motorları değişik açısal hassasiyette bulunabilir. 90 dereceden 1.8 derece veya 0.72 derecelik adım atan motorlar da vardır. 5

6 Motorlar: Çalışma prensibi DC-AC Komutatör + - Fırçalı DC Motorlar: Çalışma prensibi + - komutatör Fırçalar 6


7 Fırçalı DC Motorlar: Çalışma prensibi + - Fırçalı DC Motorlar: Çalışma prensibi 7
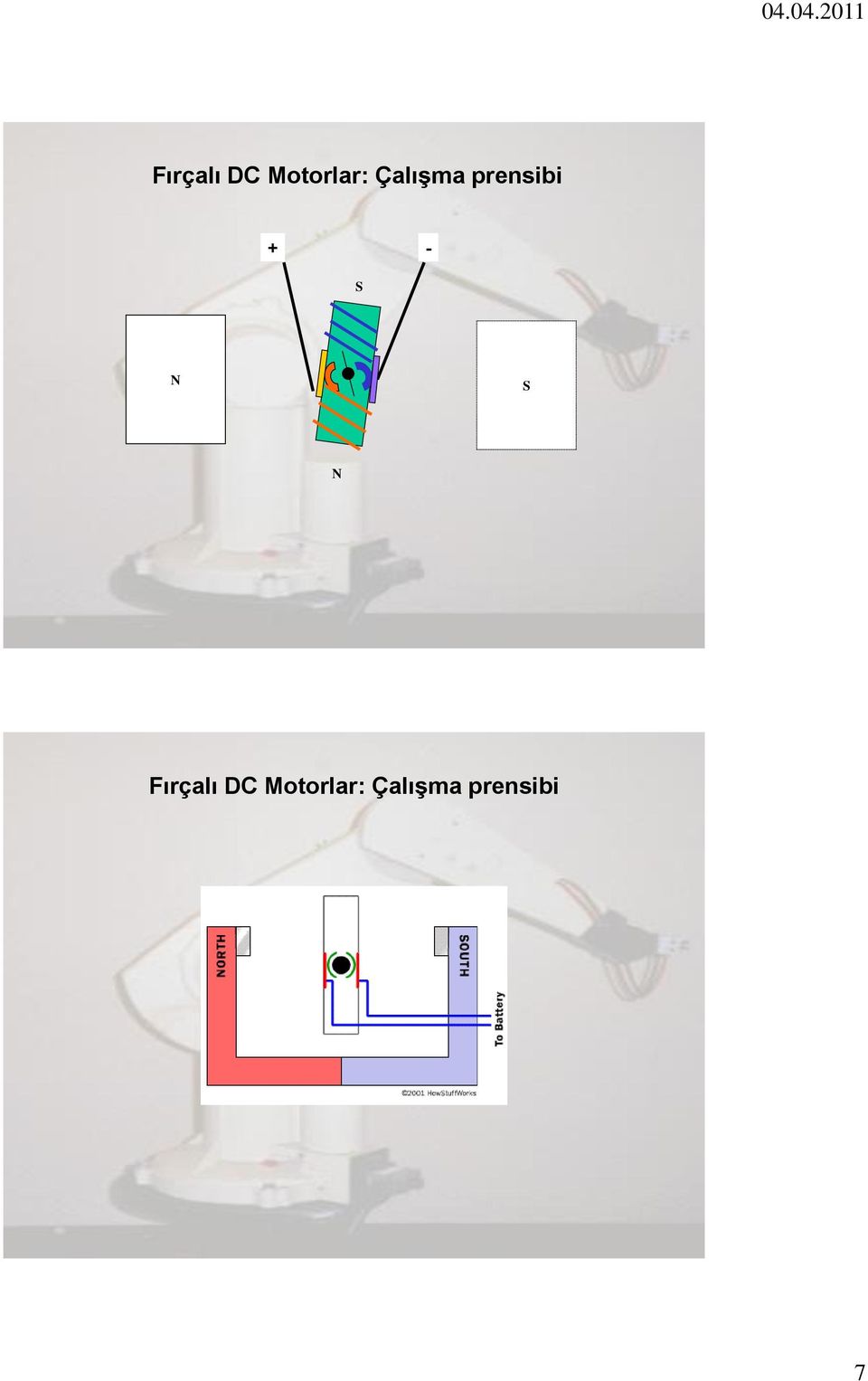
8 DC Motorlar: Çalışma prensibi Fırçalı Fırçalı- Fırçasız DC Motorlar Motorun rotorunun farklı fazlarda enerji almasını sağlamak ancak döner eleman olduklarından kabloların sınırlamalarının engellenmesi için komutatör denilen kontak elemanları kullanılır. Bu elemanlara enerji sağlayan esnek bağlantılara da fırça denir Komutatörler rotorla beraber döndüğünde fırçalar onlara belli bir baskı ile kontak yaparak negatif ve pozitif uçların güç kaynağın atemasını sağlar. Kutuplar arasında değişik sırayla akan akım rotordaki bobinlerin statordaki sabit magnet lerle etkileşimini sağlayarak hareket oluşturur. Fırçasız: DC akım pozisyon sensörleri ve işlemciler kullanılarak AC akıma dönüştürülür. AC motor benzeri bir hareket elde edilir. DC motorların Basit teorisi Motor Elektrik Enerjisini Mekanik enerjiye çevirir. Elektriksel Güç Mekanik Güç P e P m V T P e P m 8

9 DC motorların Basit teorisi Hız tork ile ters orantılıdır. w Yüksüz durum V o K R T K 2 KV T R T Bırakma Torku DC motorların Basit teorisi akım tork ile doğru orantılıdır. Bırakma akımı motorun alabileceği maxsimum akımdır. s V R tall Current o T s KV R tall Torque T 9

10 DC motorların Basit teorisi Güç çıkışı tork ve hızın çarpımıdır P m R 2 V T T 2 k R DC motorların Basit teorisi Maksimum etkinlik noktası düşük tork yüksek hız çalışma noktası olarak verilir. max s 10

11 Hidrolik and Pnometik Motorlar kısalmış Piston Kolu Hava girişi Mekanik durdurma ilindirik Yapı Uzamış Hava girişi vuruş Uzama limiti Hidrolik and Pnometik Motorlar Pnometik Güç Hava ıkıştırılmış hava İçeride sıkıştırılmış olarak veya bir pompa ile basılarak elde edilebilir. ilindirlerin ekseninde lineer hareket oluşturur. Düşük güçler elde edilir. Hidrolik Güç- ıvı ıkıştırılmamış sıvı genellikle yağ Basınç oluşturmak veya akışı sağlamak için bir pompa gerektirir. Karmaşık ve zor bir sistemdir, pahalıdır Yüksek güçler elde edilir. 11

12 Motor Karşılaştırması Motor Karşılaştırması Adım Motorları DC Motorlar Type Advantages Disadvantages çok hassas hız ve pozisyon kontrolü, düşük hızda yüksek tork Çeşitli hız ve torklarda elde edilebilir. Güçlüdürler. Pahalı, ulaşılması nispeten zor, karmaşık zamanlama gerekir Çok akım çeker, dah apahalı ve bulunması nispeten zor DC sabit magnet motorlar Küçük boyutlu, kompakt ve ulaşılması kolay, ucuz Genellikle küçük, güç ve hız konusunda çeşit az 12


13 Dişliler: Tipleri, Dişli oranı ve kullanımları DC motorlar yüksek hızda düşük tork üretir. Torku artııtmanın yolu dişi kullanmaktır. Motor dişlisi ürme dişlisi Motor Tekerlerlek Dişli oranı V 0 R 0 F F R 1 V 1 F R o T 0 F R 1 T 1 T1 R1 V 1 0 T0 R0 V0 R1 T2 6 T 0 Tork artar Dişli oranı: 1:6 V V Hız düşer R 13

14 ervo Motor ervo motor içindeki elektronik devre ile sürtekli olarak motorun pozisyonunu kontrol eden ve istenilen pozisyonda tutan motorlardır. 3 uçludur: 1. güç, 2. Referans 3. Kontrol girişi: motorun istenen pozisyonu ile orantılı bir pals genişliği sinyali. ervo motorlarda: DC motor Dişli Kutusu Açı limit devresi Pzisyon geribesleme devresi Geribeslemeli integratif kontrol devresi yeralır ervo Motor V 0.7ms t V 1.7ms t 14

15 Motor sürme: H-Bridge Elektronik kontrollü sürmeler için elektronik transistör tabanlı sürücü anahtarları kullanılır. + upply Voltage V - Motor 3 4 Motor sürme: H-Bridge 1, 4 kapalı 2, 3 Açık: akım sağa doğru akar + upply Voltage V - Motor

16 Motor sürme: H-Bridge 1, 4 açık 2, 3 kapalı: akım sola doğru akım + upply Voltage V - Motor 3 4 Motor sürme: PWM DC motorların hız kontrolünde pals genişiği modülasyonu kullanılır ve anahtarların açılıp kapanmasının değiştirilmesi, motora uygulanan eşdeğer gerilimi değiştirdiğinden hız da değişir. + upply Voltage V - Motor 3 4 V V t V t t on t 16

mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
AKTÜATÖRLER Elektromekanik Aktüatörler
 AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
AKTÜATÖRLER Bir sitemi kontrol için, elektriksel, termal yada hidrolik, pnömatik gibi mekanik büyüklükleri harekete dönüştüren elemanlardır. Elektromekanik aktüatörler, Hidromekanik aktüatörler ve pnömatik
ELEKTRİKSEL EYLEYİCİLER
 ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ELEKTRİKSEL EYLEYİCİLER Eyleyiciler (Aktuatörler) Bir cismi hareket ettiren veya kontrol eden mekanik cihazlara denir. Elektrik motorları ve elektrikli sürücüler Hidrolik sürücüler Pinomatik sürücüler
ASENKRON (İNDÜKSİYON)
") ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
ASENKRON (İNDÜKSİYON) Genel MOTOR Tek fazlı indüksiyon motoru Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir.
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ MEKATRONİK EĞİTİMİ BÖLÜMÜ BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR
 BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
BİLGİSAYAR DESTEKLİ İMALAT SERVO VE STEP MOTORLAR Step (Adım) Motorlar Elektrik enerjisini açısal dönme hareketine çeviren motorlardır. Elektrik motorlarının uygulama alanlarında sürekli hareketin (fırçalı
ASENKRON MOTOR ASENKRON (İNDÜKSİYON) MOTOR. Genel
 MOTOR. Genel") Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
Genel ASENKRON (İNDÜKSİYON) MOTOR Asenkron makinalar motor ve jeneratör olarak kullanılabilmekle birlikte, jeneratör olarak kullanım rüzgar santralleri haricinde yaygın değildir. Genellikle sanayide kullanılan
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 12. HAFTA 1 İçindekiler Fırçasız Doğru Akım Motorları 2 TANIMI VE ÖZELLİKLERİ
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
DC Motor ve Parçaları
 DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
DC Motor ve Parçaları DC Motor ve Parçaları Doğru akım motorları, doğru akım elektrik enerjisini dairesel mekanik enerjiye dönüştüren elektrik makineleridir. Yapıları DC generatörlere çok benzer. 1.7.1.
Robot Bilimi. Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI. r1.0
 Öğr. Gör. M. Ozan AKI. r1.0") Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
Robot Bilimi Robot Aktüatörler (Çıkış Elemanları, Uygulayıcılar) Öğr. Gör. M. Ozan AKI r1.0 Robot Aktüatörler Aktüatör, İngilizce act (eylem, işini yapmak) kelimesinden gelmektedir Robotun fiziksel olarak
Eyleyiciler. July 2, 2001
 Eyleyiciler July, 001 Contents 1 Giriş 1 1.1 Pnömatik, Hidrolik ve Elektirik eyleyicilerin karşılaştırılması... 1.1.1 Pnömatik Eyleyiciler..................... 1.1. Hidrolik Eyleyiciler......................
Eyleyiciler July, 001 Contents 1 Giriş 1 1.1 Pnömatik, Hidrolik ve Elektirik eyleyicilerin karşılaştırılması... 1.1.1 Pnömatik Eyleyiciler..................... 1.1. Hidrolik Eyleyiciler......................
H04 Mekatronik Sistemler. Yrd. Doç. Dr. Aytaç Gören
 H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
H04 Mekatronik Sistemler MAK 3026 - Ders Kapsamı H01 İçerik ve Otomatik kontrol kavramı H02 Otomatik kontrol kavramı ve devreler H03 Kontrol devrelerinde geri beslemenin önemi H04 Aktüatörler ve ölçme
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Sistem Dinamiği. Bölüm 6. Elektrik ve Elektromekanik Sistemler. Doç.Dr. Erhan AKDOĞAN
 Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Sistem Dinamiği Bölüm 6. Elektrik ve Elektromekanik Sistemler Sunumlarda kullanılan semboller: El notlarına bkz. Yorum Bolum No.Alt Başlık No.Denklem Sıra No Denklem numarası Şekil No Şekil numarası YTÜ-Mekatronik
Asenkron Makineler (2/3)
") Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
Asenkron Makineler (2/3) 1) Asenkron motorun çalışma prensibi Yanıt 1: (8. Hafta web sayfası ilk animasyonu dikkatle inceleyiniz) Statora 120 derecelik aralıklarla konuşlandırılmış 3 faz sargılarına, 3
Şekil-1. Doğru ve Alternatif Akım dalga şekilleri
 2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
2. Alternatif Akım =AC (Alternating Current) Değeri ve yönü zamana göre belirli bir düzen içerisinde değişen akıma AC denir. En çok bilinen AC dalga biçimi Sinüs dalgasıdır. Bununla birlikte farklı uygulamalarda
Doğru Akım (DC) Makinaları
 Makinaları") Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım (DC) Makinaları Doğru akım makinaları motor veya jeneratör olarak kullanılabilir. Genellikle DC makinalar motor olarak kullanılır. En büyük avantajları hız ve tork ayarının kolay yapılabilmesidir.
Doğru Akım Motorları
 08.05.2012 Doğru Akım Motorları Yrd. Doç. Dr. Aytaç Gören İçerik Doğru Akım Elektrik Motorları Doğru Akım Motorlarının Kısımları ve Özellikleri Güç Hesabı Adım (Step) Motorlar Servo Motorlar Lineer Servo
08.05.2012 Doğru Akım Motorları Yrd. Doç. Dr. Aytaç Gören İçerik Doğru Akım Elektrik Motorları Doğru Akım Motorlarının Kısımları ve Özellikleri Güç Hesabı Adım (Step) Motorlar Servo Motorlar Lineer Servo
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
Electric Vehicles- 4 EVs V s 4
 Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Electric Vehicles-4 Elektrikli Taşıtlarda Kullanılan Elektrik Motorları AC motor veya DC motor? Nasıl Bir Elektrik Motoru? EV lerin kontrolünde amaç torkun kontrol edilmesidir. Gaz kesme (hız azaltımı)
Elektrik. Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları
 Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
Şekil 1. Düz Diyotlu(a), Ters Diyotlu(b)
, Ters Diyotlu(b)") KORUMA DİYOTLU SOLENOİD BOBİN SMS TORK ARGE, 04.06.2014 Kullanım Amacı Solenoid bobinlerde oluşan ters gerilimin, solenoidi kontrol eden elektronik kartlara zarar vermemesi için koruma amaçlı kullanılır.
KORUMA DİYOTLU SOLENOİD BOBİN SMS TORK ARGE, 04.06.2014 Kullanım Amacı Solenoid bobinlerde oluşan ters gerilimin, solenoidi kontrol eden elektronik kartlara zarar vermemesi için koruma amaçlı kullanılır.
Hidrostatik Güç İletimi. Vedat Temiz
 Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
Hidrostatik Güç İletimi Vedat Temiz Tanım Hidrolik pompa ve motor kullanarak bir sıvı yardımıyla gücün aktarılmasıdır. Hidrolik Pompa: Pompa milinin her turunda (dönmesinde) sabit bir miktar sıvı hareketi
TAKIM TEZGAHLARI MAK 4462 SUNUM Bu sunumun hazırlanmasında ulusal ve uluslararası çeşitli yayınlardan faydalanılmıştır
 TAKIM TEZGAHLARI MAK 4462 SUNUM 4 Bu sunumun hazırlanmasında ulusal ve uluslararası çeşitli yayınlardan faydalanılmıştır 1 Kademesiz devir mekanizmaları Devir sayılarının kademesiz olarak ayarlanmasıyla;..,..,..,,.
TAKIM TEZGAHLARI MAK 4462 SUNUM 4 Bu sunumun hazırlanmasında ulusal ve uluslararası çeşitli yayınlardan faydalanılmıştır 1 Kademesiz devir mekanizmaları Devir sayılarının kademesiz olarak ayarlanmasıyla;..,..,..,,.
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
KARAMANOĞLU MEHMETBEY ÜNİVERSİTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ Elektrik Makinaları II Laboratuvarı DENEY 3 ASENKRON MOTOR A. Deneyin Amacı: Boşta çalışma ve kilitli rotor deneyleri yapılarak
Şekil1. Geri besleme eleman türleri
 HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
HIZ / KONUM GERİBESLEME ELEMANLARI Geribesleme elemanları bir servo sistemin, hızını, motor milinin bulunduğu konumu ve yükün bulunduğu konumu ölçmek ve belirlemek için kullanılır. Uygulamalarda kullanılan
Elektromekanik Kumanda Sistemleri / Ders Notları
 İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
ELEKTRĐK MOTORLARI SÜRÜCÜLERĐ EELP212 DERS 05
 EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
EELP212 DERS 05 Özer ŞENYURT Mayıs 10 1 BĐR FAZLI MOTORLAR Bir fazlı motorların çeşitleri Yardımcı sargılı motorlar Ek kutuplu motorlar Relüktans motorlar Repülsiyon motorlar Üniversal motorlar Özer ŞENYURT
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü
 DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
DENEY 12 SCR ile İki yönlü DC Motor Kontrolü DENEYİN AMACI 1. Elektromanyetik rölelerin çalışmasını ve yapısını öğrenmek 2. SCR kesime görüme yöntemlerini öğrenmek 3. Bir dc motorun dönme yönünü kontrol
İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ
 ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI İNDÜKSİYON MOTORLARIN KARAKTERİSTİKLERİNİN İNCELENMESİ DERSİN
Fatih Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü EEM 316 Haberleşme I LAB SINAVI DARBE GENLİK MODÜLASYONU (PWM)
") Fatih Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü EEM 316 Haberleşme I LAB SINAVI DARBE GENLİK MODÜLASYONU (PWM) 9.1 Amaçlar 1. µa741 ile PWM modülatör kurulması. 2. LM555 in çalışma prensiplerinin
Fatih Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü EEM 316 Haberleşme I LAB SINAVI DARBE GENLİK MODÜLASYONU (PWM) 9.1 Amaçlar 1. µa741 ile PWM modülatör kurulması. 2. LM555 in çalışma prensiplerinin
Elektrik Motorları ve Sürücüleri
 Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Elektrik Motorları ve Sürücüleri Genel Kavramlar Motor sarımı görüntüleri Sağ el kuralı bobine uygulanırsa: 4 parmak akım yönünü Başparmak N kutbunu gösterir N ve S kutbunun oluşumu Manyetik alan yönü
Bölüm 4 Doğru Akım Devreleri. Prof. Dr. Bahadır BOYACIOĞLU
 Bölüm 4 Doğru Akım Devreleri Prof. Dr. Bahadır BOYACIOĞLU Doğru Akım Devreleri Elektrik Akımı Direnç ve Ohm Yasası Elektromotor Kuvvet (EMK) Kirchoff un Akım Kuralı Kirchoff un İlmek Kuralı Seri ve Paralel
Bölüm 4 Doğru Akım Devreleri Prof. Dr. Bahadır BOYACIOĞLU Doğru Akım Devreleri Elektrik Akımı Direnç ve Ohm Yasası Elektromotor Kuvvet (EMK) Kirchoff un Akım Kuralı Kirchoff un İlmek Kuralı Seri ve Paralel
SÜLEYMAN DEMİREL ÜNİVERSİTESİ
 SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Elektronik ve Bilgisayar Eğitimi Bölümü Elektrik Makinaları Projenin Adı : DC Servo Motor Hazırlayanın : Adı : Alper Soyadı : KIZIL Numarası : 0011703006
SÜLEYMAN DEMİREL ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ Elektronik ve Bilgisayar Eğitimi Bölümü Elektrik Makinaları Projenin Adı : DC Servo Motor Hazırlayanın : Adı : Alper Soyadı : KIZIL Numarası : 0011703006
MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı-Proje No El yapımı elektrik motoru-3 Proje Raporu ADI SOYADI: CEMASLAN ÖĞRENCİ
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı-Proje No El yapımı elektrik motoru-3 Proje Raporu ADI SOYADI: CEMASLAN ÖĞRENCİ
SATIŞLARIMIZ JENERATÖRLER EMSA JENERATÖR
 SATIŞLARIMIZ JENERATÖRLER EMSA JENERATÖR KARJEN JENERATÖR KARJEN Jeneratör çoğu firma için basit gibi görünse de önemli bir yatırımdır aynı zamanda. O yüzden jeneratör alirken firma seçimine çok dikkat
SATIŞLARIMIZ JENERATÖRLER EMSA JENERATÖR KARJEN JENERATÖR KARJEN Jeneratör çoğu firma için basit gibi görünse de önemli bir yatırımdır aynı zamanda. O yüzden jeneratör alirken firma seçimine çok dikkat
326 ELEKTRİK MAKİNALARI LABORATUVARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 326-04
 MOTOR DENEY 326-04") İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
İNÖNÜ ÜNİERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜH. BÖL. 26 ELEKTRİK MAKİNALARI LABORATUARI II ÜÇ-FAZ SİNCAP KAFESLİ ASENKRON (İNDÜKSİYON) MOTOR DENEY 26-04. AMAÇ: Üç-faz sincap kafesli asenkron
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 4 Motor Denetimi Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 4 Motor Denetimi Adım (Step) Motorunun Yapısı Adım Motorlar elektrik vurularını düzgün mekanik harekete dönüştüren elektromekanik
Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir.
 ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
ALTERNATiF AKIM Alternatif Akım; Zaman içerisinde yönü ve şiddeti belli bir düzen içerisinde değişen akıma alternatif akım denir. Doğru akım ve alternatif akım devrelerinde akım yönleri şekilde görüldüğü
Şekil 1. Darbe örnekleri
 PWM SOKET BİLGİ KİTAPÇIĞI PWM(Darbe Genişlik Modülasyonu) Nedir? Darbe genişlik modülasyonundan önce araçlardaki fren sistemlerinden bahsetmekte fayda var. ABS frenler bilindiği üzere tekerleklerin kızaklanmasını
PWM SOKET BİLGİ KİTAPÇIĞI PWM(Darbe Genişlik Modülasyonu) Nedir? Darbe genişlik modülasyonundan önce araçlardaki fren sistemlerinden bahsetmekte fayda var. ABS frenler bilindiği üzere tekerleklerin kızaklanmasını
9. Güç ve Enerji Ölçümü
 9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
Elektromekanik Kumanda Sistemleri / Ders Notları
 10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
Şalterleri. Motor Koruma
 Motor Koruma Şalterleri Motor Koruma Şalterleri İçindekiler Genel Bilgiler...197 Standart Özellikler...197 Teknik Özellikler...197 Motor Koruma Şalteri Seçim Tablosu...198 Aksesuar Seçimi...198 Devre Şemaları...199
Motor Koruma Şalterleri Motor Koruma Şalterleri İçindekiler Genel Bilgiler...197 Standart Özellikler...197 Teknik Özellikler...197 Motor Koruma Şalteri Seçim Tablosu...198 Aksesuar Seçimi...198 Devre Şemaları...199
Temel Kavramlar. Elektrik Nedir? Elektrik nedir? Elektrikler geldi, gitti, çarpıldım derken neyi kastederiz?
 Temel Kavramlar Elektrik Nedir? Elektrik nedir? Elektrikler geldi, gitti, çarpıldım derken neyi kastederiz? 1 Elektriksel Yük Elektrik yükü bu dış yörüngede dolanan elektron sayısının çekirdekteki proton
Temel Kavramlar Elektrik Nedir? Elektrik nedir? Elektrikler geldi, gitti, çarpıldım derken neyi kastederiz? 1 Elektriksel Yük Elektrik yükü bu dış yörüngede dolanan elektron sayısının çekirdekteki proton
3. ELEKTRİK MOTORLARI
 3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
3. ELEKTRİK MOTORLARI Elektrik enerjisini mekanik enerjiye dönüştüren makinalardır. Her elektrik motoru biri sabit (Stator, Endüktör) ve diğeri kendi çevresinde dönen (Rotor, Endüvi) iki ana parçadan oluşur.
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET
 ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
ÖZEL EGE LİSESİ FİLTREN DÖNDÜKÇE ELEKTRİK ELDE ET HAZIRLAYAN ÖĞRENCİLER: Öykü Doğa TANSEL DANIŞMAN ÖĞRETMEN: Gökhan TUFAN İZMİR 2016 İÇİNDEKİLER 1. Projenin amacı.. 2 2. Projenin hedefi.. 2 3. Elektrik
BLM1612 DEVRE TEORİSİ
 BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
BLM1612 DEVRE TEORİSİ KAPASİTÖRLER ve ENDÜKTANSLAR DR. GÖRKEM SERBES Kapasitans Kapasitör, elektrik geçirgenliği ε olan dielektrik bir malzeme ile ayrılan iki iletken gövdeden oluşur ve elektrik alanda
PTO ED120 UYARI! Not: Mekanik hazırlığı olmayan bir araçtaki sürüş kiti olan PTO yu sonradan takmak pahalıdır ve fazla iş yükü gerektirir.
 Genel bilgiler Genel bilgiler Aşağıdaki sipariş seçenekleri ED120 PTO için mevcuttur. Hidrolik pompa bağlamak için fabrikada takılı sürüş kiti (PTO ED120P) PTO hazırlığı Daha fazla bilgi Sipariş etme seçenekleri
Genel bilgiler Genel bilgiler Aşağıdaki sipariş seçenekleri ED120 PTO için mevcuttur. Hidrolik pompa bağlamak için fabrikada takılı sürüş kiti (PTO ED120P) PTO hazırlığı Daha fazla bilgi Sipariş etme seçenekleri
MAKİNE MÜHENDİSLİĞİNE GİRİŞ Ders 4
 Akışkanlar ile ilgili temel kavramlar MAKİNE MÜHENDİSLİĞİNE GİRİŞ Ders 4 Yrd. Doç. Dr. Yüksel HACIOĞLU Su,, gaz, buhar gibi kolayca şekillerini değiştirebilen ve dış etkilerin etkisi altında kolayca hareket
Akışkanlar ile ilgili temel kavramlar MAKİNE MÜHENDİSLİĞİNE GİRİŞ Ders 4 Yrd. Doç. Dr. Yüksel HACIOĞLU Su,, gaz, buhar gibi kolayca şekillerini değiştirebilen ve dış etkilerin etkisi altında kolayca hareket
ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ
 1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
1 ÜÇ FAZLI ASENKRON MOTOR ÇALIŞMA PRENSİBİ Üç Fazlı Asenkron Motorlarda Döner Manyetik Alanın Meydana Gelişi Stator sargılarına üç fazlı alternatif gerilim uygulandığında uygulanan gerilimin frekansı ile
ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ FİZİK II LABORATUVARI DENEY 2 TRANSFORMATÖRLER
 ELEKTRİK ELEKTROİK MÜHEDİSLİĞİ FİZİK LABORATUVAR DEEY TRASFORMATÖRLER . Amaç: Bu deneyde:. Transformatörler yüksüz durumdayken giriş ve çıkış gerilimleri gözlenecek,. Transformatörler yüklü durumdayken
ELEKTRİK ELEKTROİK MÜHEDİSLİĞİ FİZİK LABORATUVAR DEEY TRASFORMATÖRLER . Amaç: Bu deneyde:. Transformatörler yüksüz durumdayken giriş ve çıkış gerilimleri gözlenecek,. Transformatörler yüklü durumdayken
Mekatroniğe Giriş Dersi
 Mekatroniğe Giriş Dersi 7. Hafta Aktüatörler Aktüatör nedir? Aktüatöre neden ihtiyaç duyulur? Aktüatör Türleri Hidrolik-Pnömatik Aktüatörler Elektrikli Aktüatörler Bu Haftanın Konu Başlıkları SAÜ - Sakarya
Mekatroniğe Giriş Dersi 7. Hafta Aktüatörler Aktüatör nedir? Aktüatöre neden ihtiyaç duyulur? Aktüatör Türleri Hidrolik-Pnömatik Aktüatörler Elektrikli Aktüatörler Bu Haftanın Konu Başlıkları SAÜ - Sakarya
Açık Çevrim Kontrol Açık Çevrim Kontrol
 Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
Açık Çevrim Kontrol Açık Çevrim Kontrol Açık çevrim kontrol ileri kontrol prosesi olarak da ifade edilebilir. Yandaki şekilde açık çevrim oda sıcaklık kontrolü yapılmaktadır. Burada referans olarak dışarı
Çok sayıda motor şekilde gibi sadece bir durumunda başlatma kontrol merkezi ile otomatik olarak çalıştırılabilir.
 7.1.4 Paket Şalter İle Bu devredeki DG düşük gerilim rölesi düşük gerilime karşı koruma yapar. Yani şebeke gerilimi kesilir ve tekrar gelirse motorun çalışmasına engel olur. 7.2 SIRALI KONTROL Sıralı kontrol,
7.1.4 Paket Şalter İle Bu devredeki DG düşük gerilim rölesi düşük gerilime karşı koruma yapar. Yani şebeke gerilimi kesilir ve tekrar gelirse motorun çalışmasına engel olur. 7.2 SIRALI KONTROL Sıralı kontrol,
ASENKRON MAKİNELER. Asenkron Motorlara Giriş
 ASENKRON MAKİNELER Asenkron Motorlara Giriş İndüksiyon motor yada asenkron motor (ASM), rotor için gerekli gücü komitatör yada bileziklerden ziyade elektromanyetik indüksiyon yoluyla aktaran AC motor tipidir.
ASENKRON MAKİNELER Asenkron Motorlara Giriş İndüksiyon motor yada asenkron motor (ASM), rotor için gerekli gücü komitatör yada bileziklerden ziyade elektromanyetik indüksiyon yoluyla aktaran AC motor tipidir.
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL İçerik Algılama Teknolojisi Algılama Mekanizması Uygun Sensör SENSÖR SİSTEMİ Ölçme ve Kontrol Sistemi Transdüser ve Sensör Kavramı Günlük hayatımızda ısı, ışık, basınç
Sensörler Yrd.Doç.Dr. İlker ÜNAL İçerik Algılama Teknolojisi Algılama Mekanizması Uygun Sensör SENSÖR SİSTEMİ Ölçme ve Kontrol Sistemi Transdüser ve Sensör Kavramı Günlük hayatımızda ısı, ışık, basınç
Aktüatörler ve Aktüatör Seçimi
 Aktüatörler ve Aktüatör Seçimi Resim-1 Dr. Özgür AKIN Giriş Aktüatör Nedir? Aktüatörlere Neden İhtiyaç Duyarız? Aktüatörlerin Sınıflandırılması. Aktüatör Nedir? Aktüatör, bir mekanizmayı veya sistemi kontrol
Aktüatörler ve Aktüatör Seçimi Resim-1 Dr. Özgür AKIN Giriş Aktüatör Nedir? Aktüatörlere Neden İhtiyaç Duyarız? Aktüatörlerin Sınıflandırılması. Aktüatör Nedir? Aktüatör, bir mekanizmayı veya sistemi kontrol
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
Servo Motor. Servo Motorların Kullanıldığı Yerler
 Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
Servo Motor Tanımı: 1 devir/dakikalık hız bölgelerinin altında bile kararlı çalışabilen, hız ve moment kontrolü yapan yardımcı motorlardır. Örneğin hassas takım tezgâhlarında ilerleme hareketleri için
METSİM SİSTEM MÜHENDİSLİK
 Yeni seri lineer ve açı sensörleri ile Turck, sensör teknolojilerinde teknolojik atılımların halen mümkün olduğunu göstermektedir. Yeni sensör üniteleri alışıldık ölçüm sistemlerinin tüm olumlu yönlerini
Yeni seri lineer ve açı sensörleri ile Turck, sensör teknolojilerinde teknolojik atılımların halen mümkün olduğunu göstermektedir. Yeni sensör üniteleri alışıldık ölçüm sistemlerinin tüm olumlu yönlerini
PTO ED160. Genel bilgiler Genel bilgiler. Scania Truck Bodybuilder 22: Yayım Scania CV AB 2017, Sweden 1 (8)
") Genel bilgiler Genel bilgiler Aşağıdaki sipariş seçenekleri ED160 PTO için mevcuttur. Hidrolik pompa bağlamak için fabrikada takılı sürüş kiti (PTO ED160P) PTO hazırlığı Daha fazla bilgi Sipariş etme seçenekleri
Genel bilgiler Genel bilgiler Aşağıdaki sipariş seçenekleri ED160 PTO için mevcuttur. Hidrolik pompa bağlamak için fabrikada takılı sürüş kiti (PTO ED160P) PTO hazırlığı Daha fazla bilgi Sipariş etme seçenekleri
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü
 MAK-407 Müh. Tas. I S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A-ġubesi B-ġubesi
MAK-407 Müh. Tas. I S Ü L E Y M A N D E M Ġ R E L Ü N Ġ V E R S Ġ T E S Ġ M Ü H E N D Ġ S L Ġ F A K Ü L T E S Ġ M A K Ġ N A M Ü H E N D Ġ S L Ġ Ğ Ġ B Ö L Ü M Ü I. öğretim II. öğretim A-ġubesi B-ġubesi
MAK-LAB017 HİDROLİK SERVO MEKANİZMALAR DENEYİ 1. DENEYİN AMACI 2. HİDROLİK SİSTEMLERDE KULLANILAN ENERJİ TÜRÜ
 MAK-LAB017 HİDROLİK SERVO MEKANİZMALAR DENEYİ 1. DENEYİN AMACI Bu deneyin amacı temel ilkelerden hareket ederek, hidrolik sistemlerde kullanılan elemanların çalışma ilkeleri ve hidrolik devre kavramlarının
MAK-LAB017 HİDROLİK SERVO MEKANİZMALAR DENEYİ 1. DENEYİN AMACI Bu deneyin amacı temel ilkelerden hareket ederek, hidrolik sistemlerde kullanılan elemanların çalışma ilkeleri ve hidrolik devre kavramlarının
Şekil Sönümün Tesiri
 LC Osilatörler RC osilatörlerle elde edilemeyen yüksek frekanslı osilasyonlar LC osilatörlerle elde edilir. LC osilatörlerle MHz seviyesinde yüksek frekanslı sinüsoidal sinyaller elde edilir. Paralel bobin
LC Osilatörler RC osilatörlerle elde edilemeyen yüksek frekanslı osilasyonlar LC osilatörlerle elde edilir. LC osilatörlerle MHz seviyesinde yüksek frekanslı sinüsoidal sinyaller elde edilir. Paralel bobin
kutuplu, 8 A Emniyet rölesi. Vidalı terminal. 2 CO (DPDT) 8/15 250/400 2, /0.65/ (5/5) AgNi /0.
 8/15 250/400 2, /0.65/ (5/5) AgNi /0.") 48 Serisi - Röle Arayüz Modülleri 8 A Özellikler 48.12 2 kutuplu emniyet rölesi arayüz modülleri, 15.8 mm genişlik 48.12-2 kutuplu 8 A (vidalı terminal) DC hassas bobinler EN 50205 Type B ye göre güç bindirilerek
48 Serisi - Röle Arayüz Modülleri 8 A Özellikler 48.12 2 kutuplu emniyet rölesi arayüz modülleri, 15.8 mm genişlik 48.12-2 kutuplu 8 A (vidalı terminal) DC hassas bobinler EN 50205 Type B ye göre güç bindirilerek
ASENKRON MOTORLARA YOL VERME METODLARI
 DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. DC Motor Hız Kontrolü Proje No: 1
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ DC Motor Hız Kontrolü Proje No: 1 Proje Raporu Cemre ESEMEN 12068033 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ DC Motor Hız Kontrolü Proje No: 1 Proje Raporu Cemre ESEMEN 12068033 16.01.2013 İstanbul
Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü
 Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü Dersin Amacı Pnömatik sistemlerde kullanılan elektrik kumanda elemanlarını tanıtmak. Kumanda elemanları ve pnömatik valfleri kullanarak
Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü Dersin Amacı Pnömatik sistemlerde kullanılan elektrik kumanda elemanlarını tanıtmak. Kumanda elemanları ve pnömatik valfleri kullanarak
49 Serisi - Röle Arayüz Modelleri 8-10 - 16 A. Özellikler
 Özellikler 1 & 2 kutuplu arayüz modelleri Düşük seviyeli anahtarlama kapasitesi için 5 μm altın kontaklar 49.31-50x0-1 kutup 10 (vidalı uç) 49.52-50x0-2 kutup 8 (vidalı uç) 49.72-50x0-2 kutup 8 (vidasız
Özellikler 1 & 2 kutuplu arayüz modelleri Düşük seviyeli anahtarlama kapasitesi için 5 μm altın kontaklar 49.31-50x0-1 kutup 10 (vidalı uç) 49.52-50x0-2 kutup 8 (vidalı uç) 49.72-50x0-2 kutup 8 (vidasız
ELEKTRİK MOTORLARI VE SÜRÜCÜLER
 BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
BÖLÜM 4 A.A. MOTOR SÜRÜCÜLERİ 4.1.ALTERNATİF AKIM MOTORLARININ DENETİMİ Alternatif akım motorlarının, özellikle sincap kafesli ve bilezikli asenkron motorların endüstriyel uygulamalarda kullanımı son yıllarda
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ Elektrik ve Elektronik Ölçmeler Laboratuvarı Deney Adı: Sensörler. Deney 5: Sensörler. Deneyin Amacı: A.
 Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
SENKRON MAKİNA DENEYLERİ
 DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
DENEY-8 SENKRON MAKİNA DENEYLERİ Senkron Makinaların Genel Tanımı Senkron makina; stator sargılarında alternatif akım, rotor sargılarında ise doğru akım bulunan ve rotor hızı senkron devirle dönen veya
Türkiye nin ilk fark basınç transmitteri imalatı,
 Enelsan Endüstriyel Elektronik Sanayii Anonim Şirketi ticari faaliyetlerinin yanı sıra geliştirdiği üretim ve sistem entegrasyonu faaliyetlerini 1976 dan beri Dilovası Organize Sanayi Bölgesindeki kendi
Enelsan Endüstriyel Elektronik Sanayii Anonim Şirketi ticari faaliyetlerinin yanı sıra geliştirdiği üretim ve sistem entegrasyonu faaliyetlerini 1976 dan beri Dilovası Organize Sanayi Bölgesindeki kendi
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1
 Yazar: Yrd. Doç. Dr. Mustafa Turan S1") ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
ELEKTRİK MAKİNELERİ (MEP 112) Yazar: Yrd. Doç. Dr. Mustafa Turan S1 SAKARYA ÜNİVERSİTESİ Adapazarı Meslek Yüksekokulu Bu ders içeriğinin basım, yayım ve satış hakları Sakarya Üniversitesi ne aittir. "Uzaktan
Hidrolik Paletli Pompa
 Hidrolik Paletli Pompa 05532862889 [email protected] http://www.ahidrolikdunyasi.com Hidrolik paletli pompalar tanımı Hidrolik paletli çalışma prensibi Hidrolik paletli kapasite çizelgesi Hidrolik
Hidrolik Paletli Pompa 05532862889 [email protected] http://www.ahidrolikdunyasi.com Hidrolik paletli pompalar tanımı Hidrolik paletli çalışma prensibi Hidrolik paletli kapasite çizelgesi Hidrolik
Otomatik Kontrol I. Dinamik Sistemlerin Matematik Modellenmesi. Yard.Doç.Dr. Vasfi Emre Ömürlü
 Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
Otomatik Kontrol I Dinamik Sistemlerin Matematik Modellenmesi Yard.Doç.Dr. Vasfi Emre Ömürlü Mekanik Sistemlerin Modellenmesi Elektriksel Sistemlerin Modellenmesi Örnekler 2 3 Giriş Karmaşık sistemlerin
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No El yapımı elektrik motoru - 3 Proje Raporu Adı, Soyadı, Öğrenci Numarası
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No El yapımı elektrik motoru - 3 Proje Raporu Adı, Soyadı, Öğrenci Numarası
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1.
 ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1. HAFTA 1 İçindekiler Elektrik Makinalarına Giriş Elektrik Makinalarının
ANKARA ÜNİVERSİTESİ GAMA MESLEK YÜKSEKOKULU ELEKTRİK VE ENERJİ BÖLÜMÜ ALTERNATİF ENERJİ KAYNAKLARI TEKNOLOJİSİ ELEKTRİK MAKİNALARI 1. HAFTA 1 İçindekiler Elektrik Makinalarına Giriş Elektrik Makinalarının
İçerik. Ürün no.: MSI-SR-SM42OS-03 Güvenlik rölesi. Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Devre şeması Uyarılar
 Ürün no.: 50133031 MSI-SR-SM42OS-03 Güvenlik rölesi Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Devre şeması Uyarılar 1 / 5 Teknik veriler Temel veriler
Ürün no.: 50133031 MSI-SR-SM42OS-03 Güvenlik rölesi Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Devre şeması Uyarılar 1 / 5 Teknik veriler Temel veriler
UÇUŞ MEKANİĞİ ve UÇAK PERFORMANSI Güç Sistemi Kuvvetleri (Devam)
") UÇUŞ MEKANİĞİ ve UÇAK PERFORMANSI Güç Sistemi Kuvvetleri (Devam) Hazırlayan Prof. Dr. Mustafa CAVCAR Güç Sistemi Kuvvetleri Türbojet ve Türbofan Motorlar Türbojet Türbofan Türbojet ve türbofan motorlar,
UÇUŞ MEKANİĞİ ve UÇAK PERFORMANSI Güç Sistemi Kuvvetleri (Devam) Hazırlayan Prof. Dr. Mustafa CAVCAR Güç Sistemi Kuvvetleri Türbojet ve Türbofan Motorlar Türbojet Türbofan Türbojet ve türbofan motorlar,
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri)
") KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
KARADENİZ TEKNİK ÜNİVERSİTESİ Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Power Electronic Circuits (Güç Elektroniği Devreleri) 1. DENEYİN AMACI ÜÇ FAZ EVİRİCİ 3 Faz eviricilerin çalışma
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm GENEL ÖZELLİKLER
 ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
ABSOLUTE ROTARY ENKODER Çok Turlu Absolute Enkoder, Manyetik Ölçüm MAS Analog Çıkışlı MAS-S 50 MAS-S 58 MAS-B 50 MAS-B 58 Manyetik prensiple absolute (mutlak) ölçüm 50 mm veya 58 mm gövde çapı seçenekleri
G-1 ATEÞLEME BOBÝNÝ KONTROLU... G-5 AKÜ SÖKÜLMESÝ/TAKILMASI DÝSTRÝBÜTÖR DAÐITILMASI/TOPLANMASI... G-8 DÝSTRÝBÜTÖR KONTROLÜ (F2 CARB)...
...") MOTOR ELEKTRÝÐÝ SÝSTEMÝ ÞARJ SÝSTEMÝ... G-1 AKÜ SÖKÜLMESÝ/TAKILMASI... G-1 AKÜ KONTROLÜ... G-1 AKÜ ÞARJI... G-2 ALTERNATÖR SÖKÜLMESÝ/TAKILMASI... G-2 ALTERNATÖR KONTROLÜ... G-3 ATEÞLEME SÝSTEMÝ... G-5
MOTOR ELEKTRÝÐÝ SÝSTEMÝ ÞARJ SÝSTEMÝ... G-1 AKÜ SÖKÜLMESÝ/TAKILMASI... G-1 AKÜ KONTROLÜ... G-1 AKÜ ÞARJI... G-2 ALTERNATÖR SÖKÜLMESÝ/TAKILMASI... G-2 ALTERNATÖR KONTROLÜ... G-3 ATEÞLEME SÝSTEMÝ... G-5
ALTERNATİF AKIMIN TEMEL ESASLARI
 ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ ALTERNATİF AKIMIN TEMEL ESASLARI Dr. Öğr. Üyesi Ahmet ÇİFCİ Elektrik enerjisi, alternatif akım ve doğru akım olarak
60 Serisi - Genel Amaçlı Röleler 6-10 A. Özellikler
 60 Serisi - Genel Amaçlı Röleler 6-10 A Özellikler 60.12 60.13 Soket Tipi Montajlı 10 A Akımlı genel amaçlı röleler 2 ve 3 kutuplu değişken kontaklar Kadminyumsuz kontaklar AC ve DC bobinler UL Liste (belirli
60 Serisi - Genel Amaçlı Röleler 6-10 A Özellikler 60.12 60.13 Soket Tipi Montajlı 10 A Akımlı genel amaçlı röleler 2 ve 3 kutuplu değişken kontaklar Kadminyumsuz kontaklar AC ve DC bobinler UL Liste (belirli
OMRON FREKANS İNVERTÖRLERİNDE AUTO-TUNING
 OMRON FREKANS İNVERTÖRLERİNDE AUTO-TUNING İÇİNDEKİLER Giriş MX2 İnvertörlerde Auto-tuning RX İnvertörlerde Auto-tuning V1000 İnvertörlerde Auto-tuning A1000 İnvertörlerde Auto-tuning SX İnvertörlerde Auto-tuning
OMRON FREKANS İNVERTÖRLERİNDE AUTO-TUNING İÇİNDEKİLER Giriş MX2 İnvertörlerde Auto-tuning RX İnvertörlerde Auto-tuning V1000 İnvertörlerde Auto-tuning A1000 İnvertörlerde Auto-tuning SX İnvertörlerde Auto-tuning
Endüktif sensörler nasıl çalışır
 T E K N İ K T A N I T I M B E L G E S İ Endüktif sensörler nasıl çalışır Yazar: Mark Howard, Genel Müdür, Zettlex UK Ltd Dosya ref: technical articles/endüktif sensörler nasıl çalışır_rev2.0 w w w. z e
T E K N İ K T A N I T I M B E L G E S İ Endüktif sensörler nasıl çalışır Yazar: Mark Howard, Genel Müdür, Zettlex UK Ltd Dosya ref: technical articles/endüktif sensörler nasıl çalışır_rev2.0 w w w. z e
BÖLÜM X OSİLATÖRLER. e b Yükselteç. Be o Geri Besleme. Şekil 10.1 Yükselteçlerde geri besleme
 BÖLÜM X OSİLATÖRLER 0. OSİLATÖRE GİRİŞ Kendi kendine sinyal üreten devrelere osilatör denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen ve testere
BÖLÜM X OSİLATÖRLER 0. OSİLATÖRE GİRİŞ Kendi kendine sinyal üreten devrelere osilatör denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen ve testere
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL MANYETİK SENSÖRLER VE TRANSDÜSERLER Bir tel bobin haline getirilip içinden akım geçirilirse, bu bobinin içinde ve çevresinde manyetik alan oluşur. Bu manyetik alan gözle
Sensörler Yrd.Doç.Dr. İlker ÜNAL MANYETİK SENSÖRLER VE TRANSDÜSERLER Bir tel bobin haline getirilip içinden akım geçirilirse, bu bobinin içinde ve çevresinde manyetik alan oluşur. Bu manyetik alan gözle
Alternatif Akım Devre Analizi
 Alternatif Akım Devre Analizi Öğr.Gör. Emre ÖZER Alternatif Akımın Tanımı Zamaniçerisindeyönüveşiddeti belli bir düzen içerisinde (periyodik) değişen akıma alternatif akımdenir. En bilinen alternatif akım
Alternatif Akım Devre Analizi Öğr.Gör. Emre ÖZER Alternatif Akımın Tanımı Zamaniçerisindeyönüveşiddeti belli bir düzen içerisinde (periyodik) değişen akıma alternatif akımdenir. En bilinen alternatif akım
2-MANYETIK ALANLAR İÇİN GAUSS YASASI
 2-MANYETIK ALANLAR İÇİN GAUSS YASASI Elektrik yükleri yani pozitif ve negatif yükler birbirlerinden ayrı ve izole halde düşünülebilirler. Bu durum, Kuzey ve güney manyetik kutuplar için de söz konusu olabilir
2-MANYETIK ALANLAR İÇİN GAUSS YASASI Elektrik yükleri yani pozitif ve negatif yükler birbirlerinden ayrı ve izole halde düşünülebilirler. Bu durum, Kuzey ve güney manyetik kutuplar için de söz konusu olabilir
Manyetizma. Manyetik alan çizgileri, çizim. Manyetik malzeme türleri. Manyetik alanlar. BÖLÜM 29 Manyetik alanlar
 ÖLÜM 29 Manyetik alanlar Manyetik alan Akım taşıyan bir iletkene etkiyen manyetik kuvvet Düzgün bir manyetik alan içerisindeki akım ilmeğine etkiyen tork Yüklü bir parçacığın düzgün bir manyetik alan içerisindeki
ÖLÜM 29 Manyetik alanlar Manyetik alan Akım taşıyan bir iletkene etkiyen manyetik kuvvet Düzgün bir manyetik alan içerisindeki akım ilmeğine etkiyen tork Yüklü bir parçacığın düzgün bir manyetik alan içerisindeki
MESAFE VE KONUM ALGILAYICILARI
 MESAFE VE KONUM ALGILAYICILARI Mesafe (veya yer değiştirme) algılayıcıları birçok farklı türde ölçüm sistemini temel alabilir. Temassız tip mesafe algılayıcıları imalat sanayinde geniş kullanım alanına
MESAFE VE KONUM ALGILAYICILARI Mesafe (veya yer değiştirme) algılayıcıları birçok farklı türde ölçüm sistemini temel alabilir. Temassız tip mesafe algılayıcıları imalat sanayinde geniş kullanım alanına
KONUM ALGILAMA YÖNTEMLERİ VE KONTROLÜ
 KONUM ALGILAMA YÖNTEMLERİ VE KONTROLÜ 1. AMAÇ: Endüstride kullanılan direnç, kapasite ve indüktans tipi konum (yerdeğiştirme) algılama transdüserlerinin temel ilkelerini açıklayıp kapalı döngü denetim
KONUM ALGILAMA YÖNTEMLERİ VE KONTROLÜ 1. AMAÇ: Endüstride kullanılan direnç, kapasite ve indüktans tipi konum (yerdeğiştirme) algılama transdüserlerinin temel ilkelerini açıklayıp kapalı döngü denetim
Accurax lineer motor ekseni
 ADR RL-EA-AF-@ Accurax lineer motor ekseni Gelişmiş lineer motor ekseni Yüksek etkili demir çekirdekli lineer motorlar ve mıknatıs kanalları standart lineer motor ekseninde 00'ün üzerinde çeşitliliğe sahiptir.
ADR RL-EA-AF-@ Accurax lineer motor ekseni Gelişmiş lineer motor ekseni Yüksek etkili demir çekirdekli lineer motorlar ve mıknatıs kanalları standart lineer motor ekseninde 00'ün üzerinde çeşitliliğe sahiptir.
ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI
 DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
DENEY-2 Kapaksız raporlar değerlendirilmeyecektir. ÜÇ FAZLI ASENKRON MOTORDA KAYMANIN BULUNMASI 1. Teorik Bilgi Asenkron Motorların Çalışma Prensibi Asenkron motorların çalışması şu üç prensibe dayanır:
AET 113 DOĞRU AKIMI DEVRE ANALİZİ 1. HAFTA
 AET 113 DOĞRU AKIMI DEVRE ANALİZİ 1. HAFTA İçindekiler Temel Kavramlar Devre Elemanları Elektrik Devre Kaynakları GERİLİM (v) Pozitif ve negatif yük birbirinden ayrıldığı zaman enerji harcanır. Gerilim,
AET 113 DOĞRU AKIMI DEVRE ANALİZİ 1. HAFTA İçindekiler Temel Kavramlar Devre Elemanları Elektrik Devre Kaynakları GERİLİM (v) Pozitif ve negatif yük birbirinden ayrıldığı zaman enerji harcanır. Gerilim,
SANAEM RFQ (SPP) HIZLANDIRICISI GÜÇ KAYNAKLARI VE ÖLÇME KUTUSU KONTROL SİSTEMİ. Aydın ÖZBEY İstanbul Üniversitesi
 HIZLANDIRICISI GÜÇ KAYNAKLARI VE ÖLÇME KUTUSU KONTROL SİSTEMİ. Aydın ÖZBEY İstanbul Üniversitesi") SANAEM RFQ (SPP) HIZLANDIRICISI GÜÇ KAYNAKLARI VE ÖLÇME KUTUSU KONTROL SİSTEMİ Aydın ÖZBEY İstanbul Üniversitesi Proton hızlandırıcısı kontrol sistemi Neler üzerinde duracağız? Kontrol edilecek parametreler
SANAEM RFQ (SPP) HIZLANDIRICISI GÜÇ KAYNAKLARI VE ÖLÇME KUTUSU KONTROL SİSTEMİ Aydın ÖZBEY İstanbul Üniversitesi Proton hızlandırıcısı kontrol sistemi Neler üzerinde duracağız? Kontrol edilecek parametreler