Çalışmamız (Ne Yaptık?) Materyal Metot (Nasıl Yaptık?) Uygulama (Demo) Deneysel Sonuçlar Teşekkür ve Sorular
|
|
|
- Bercu Kobal
- 9 yıl önce
- İzleme sayısı:
Transkript

1
 Materyal Metot (Nasıl")
 Uygulama (Demo) Deneysel")
2 Çalışmamız (Ne Yaptık?) Materyal Metot (Nasıl Yaptık?) Uygulama (Demo) Deneysel Sonuçlar Teşekkür ve Sorular




3 Kinect Sensör Kullanıcı Denetimi 3D Yapay Zekâ Teknikleri

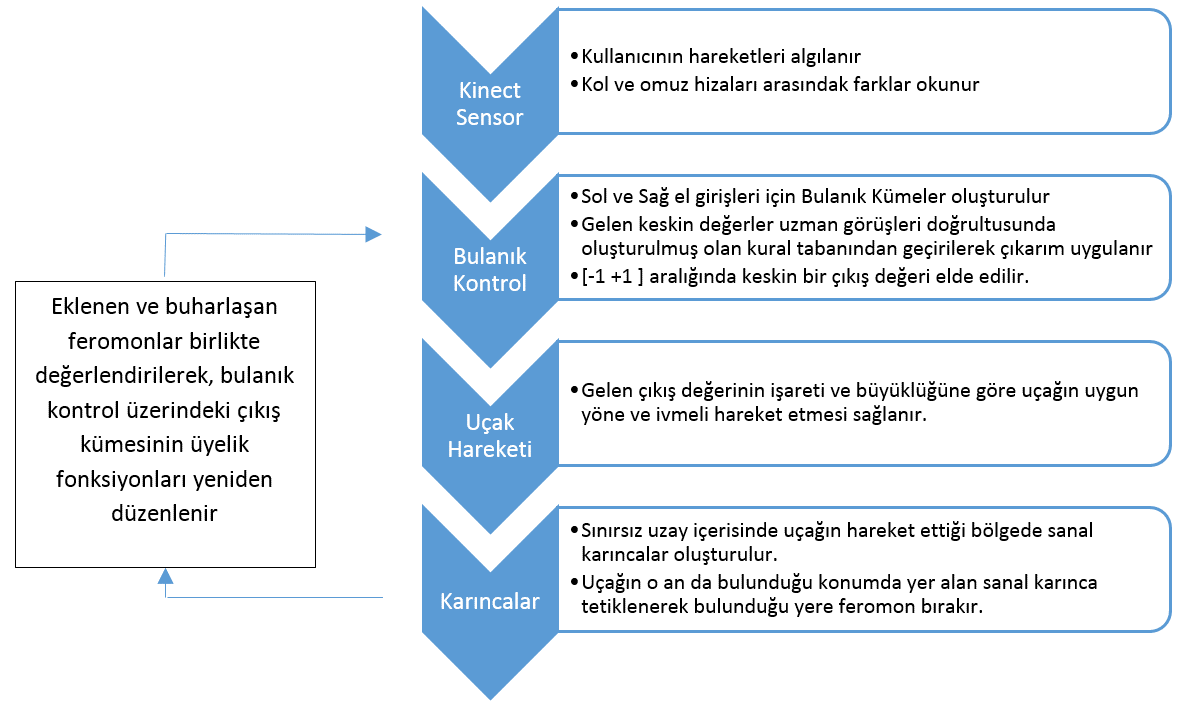
4 Yapılan bu çalışma Kinect sensörden elde edilen verilerin yapay zekâ teknikleri ile işlenerek kullanıcı kontrolünün iyileştirilmesini hedeflemektedir. Bu amaçla örnek bir üç boyutlu oyun tasarlanmıştır. Oyun içerisindeki uçak modeli geçtiği yerlere feromon maddesi bırakmaktadır. Feromon maddesi bulanık kontrol üyelik fonksiyonlarının dinamikleştirilmesinde kullanılmaktadır Bu sayede uçak modelinin zor durumlarda daha iyi tepkiler verebilirliği araştırılmıştır.
 Bulanık Kontrol Yöntemi Dinamik Fonksiyonlu Bulanık Kontrol Yöntemi Takip Rotası Oluşturma Modülü Microsoft Kinect SDK WPF (Arayüz")
5 Kinect Sensör (Hareket Algılama) «uciskelet» Tekrar Kullanılabilir Modülü User Control Bulanık Mantık Alternatif Denetim Mekanizmaları Normal Yöntem (Matematiksel Model) Bulanık Kontrol Yöntemi Dinamik Fonksiyonlu Bulanık Kontrol Yöntemi Takip Rotası Oluşturma Modülü Microsoft Kinect SDK WPF (Arayüz ve 3D)


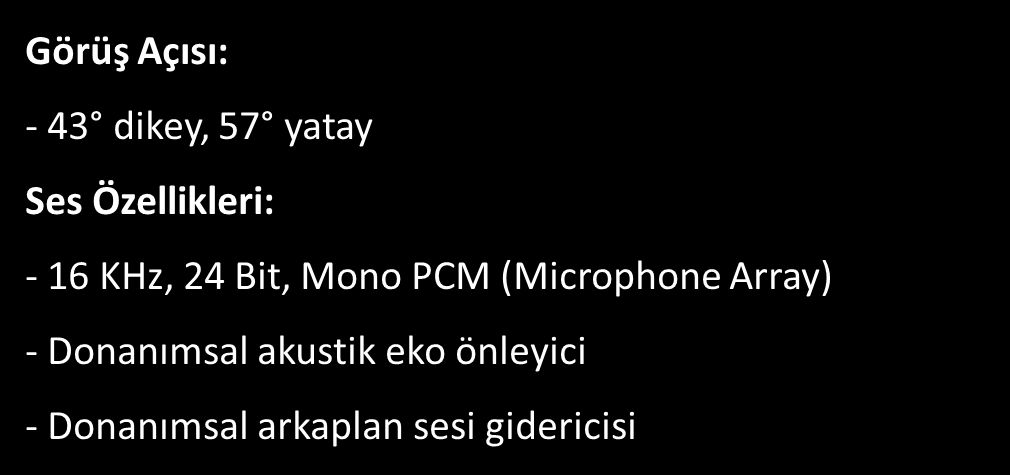
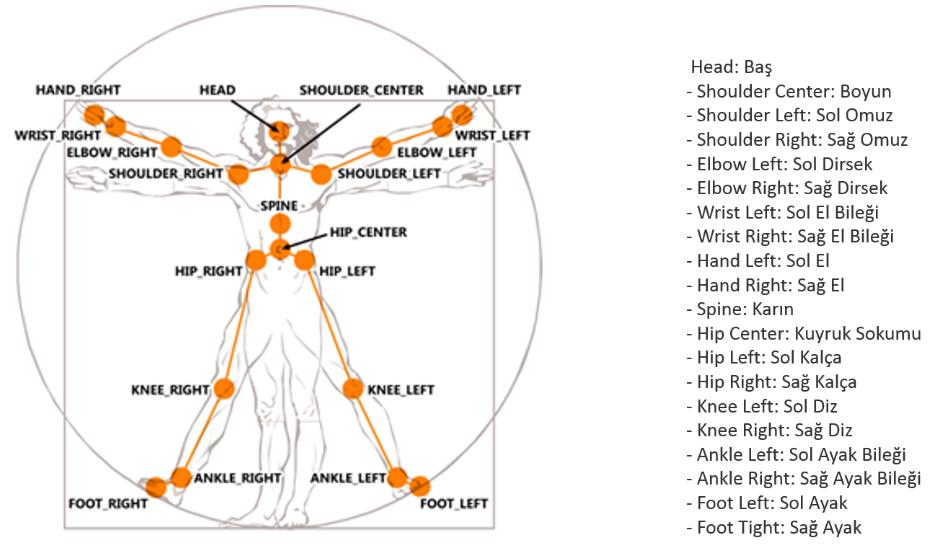
6 Temelde hareket algılayıcı bir sensördür. Renkli kamera görüntüsü, derinlik bilgisi ve algıladığı iskelet yapısını bilgisayara iletir. Üzerindeki mikrofon dizisi ile ses yönünü de belirleyebilir.



7

8

9

10 Aristo Mantığı 35


11 α = 1 P 2y P 1 y P 2 x P 1 x Normal Yöntemle Uçak Modelini Hareket Ettirmek İçin Gerekli Olan Eğim Miktarının Hesaplanması

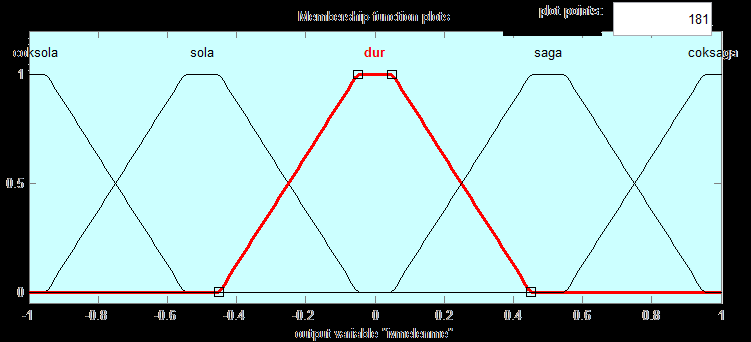
12 Bulanık Kontrol Yöntemiyle Uçak Modelinin Hareket Ettirilmesi

13 Bulanık Kontrol Yöntemi İçin Belirlenmiş Olan Giriş ve Çıkış Değerleri
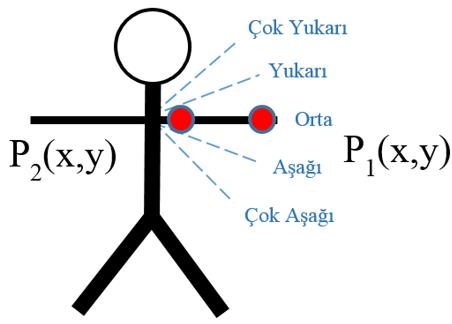
14 solkeskingiris = P 2 y P 1 y

15 Çok Yukarı Çok Yukarı Yukarı Yukarı Orta Aşağı Çok Aşağı + Orta Aşağı Çok Aşağı DUR Çok Yukarı Çok Yukarı Yukarı Yukarı Orta Aşağı Çok Aşağı + Orta Aşağı Çok Aşağı SOLA Çok Yukarı Yukarı Çok Yukarı Yukarı Orta Aşağı Çok Aşağı + Orta Aşağı Çok Aşağı SAĞA
16 IF (SolEl IS cokasagi) AND (SagEl IS cokasagi) THEN Yon IS dur IF (SolEl IS cokasagi) AND (SagEl IS asagi) THEN Yon IS sola IF (SolEl IS cokasagi) AND (SagEl IS orta) THEN Yon IS coksola IF (SolEl IS cokasagi) AND (SagEl IS yukari) THEN Yon IS coksola IF (SolEl IS cokasagi) AND (SagEl IS cokyukari) THEN Yon IS coksola IF (SolEl IS asagi) AND (SagEl IS cokasagi) THEN Yon IS saga IF (SolEl IS asagi) AND (SagEl IS asagi) THEN Yon IS dur IF (SolEl IS asagi) AND (SagEl IS orta) THEN Yon IS sola IF (SolEl IS asagi) AND (SagEl IS yukari) THEN Yon IS coksola IF (SolEl IS asagi) AND (SagEl IS cokyukari) THEN Yon IS coksola IF (SolEl IS yukari) AND (SagEl IS cokasagi) THEN Yon IS coksaga IF (SolEl IS yukari) AND (SagEl IS asagi) THEN Yon IS coksaga IF (SolEl IS yukari) AND (SagEl IS orta) THEN Yon IS saga IF (SolEl IS yukari) AND (SagEl IS yukari) THEN Yon IS dur IF (SolEl IS yukari) AND (SagEl IS cokyukari) THEN Yon IS sola IF (SolEl IS cokyukari) AND (SagEl IS cokasagi) THEN Yon IS coksaga IF (SolEl IS cokyukari) AND (SagEl IS asagi) THEN Yon IS coksaga IF (SolEl IS cokyukari) AND (SagEl IS orta) THEN Yon IS coksaga IF (SolEl IS cokyukari) AND (SagEl IS yukari) THEN Yon IS saga IF (SolEl IS cokyukari) AND (SagEl IS cokyukari) THEN Yon IS dur IF (SolEl IS orta) AND (SagEl IS cokasagi) THEN Yon IS coksaga IF (SolEl IS orta) AND (SagEl IS asagi) THEN Yon IS saga IF (SolEl IS orta) AND (SagEl IS orta) THEN Yon IS dur IF (SolEl IS orta) AND (SagEl IS yukari) THEN Yon IS sola IF (SolEl IS orta) AND (SagEl IS cokyukari) THEN Yon IS coksola

17 Sanal karıncaların yerleşimi


18 Tetiklenen karınca ve önceden bırakılan feromonların buharlaşması

19 Değişen feromon miktarlarına göre üyelik fonksiyonlarının dinamikleştirilmesi
20

21

22 Temelde bir sinüs fonksiyonu!


23 Bileşen: Çok Sınırlar: Geniş Düzlük: Daha Az

24 Kinect: Microsoft SDK Arayüz: WPF Değerlendirme: Matlab
25

26 Dahili olarak kullanageldiği GPU (Graphic Prosessing Unit), Tasarım ve kodlamanın birbirinden ayrılarak daha hızlı ve temiz bir kodlama imkânı sunmasından ve 3D modellerin oluşturulması ve dönüşüm işlemlerinin çok kolay uygulanabilmesinden dolayı tercih edilmiştir.




27 Konum-Zaman Çapraz Korelasyon

28 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Kolay Rota

29 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Kolay Rota

30 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Normal Rota

31 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Normal Rota

32 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Normal Rota 2
33 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Normal Rota 2

34 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Zor Rota

35 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Zor Rota


36 Takip Rotası Normal Yöntem Bul. Mantık Karıncalı Bul. Mantık Zor Rota


37 bize katlandığınız için!
3D Oyun Tasarımlarında Kullanıcı Denetimi İyileştirilmesi İçin Kinect Algılayıcısı ve Yapay Zekâ Tekniklerinin Kullanımı
 3D Oyun Tasarımlarında Kullanıcı Denetimi İyileştirilmesi İçin Kinect Algılayıcısı ve Yapay Zekâ Tekniklerinin Kullanımı Erkan Hürnalı 1, Taner Topal 2 1 Ankara Üniversitesi Elmadağ MYO, Bilgisayar Teknolojileri
3D Oyun Tasarımlarında Kullanıcı Denetimi İyileştirilmesi İçin Kinect Algılayıcısı ve Yapay Zekâ Tekniklerinin Kullanımı Erkan Hürnalı 1, Taner Topal 2 1 Ankara Üniversitesi Elmadağ MYO, Bilgisayar Teknolojileri
Özet: Anahtar Sözcükler: Abstract:
 3D Oyun Tasarımlarında Kullanıcı Denetimi İyileştirilmesi İçin Kinect Algılayıcısı ve Yapay Zekâ Tekniklerinin Kullanımı Microsoft Kinect ile Yapay Zekâ Teknikleri Kullanılarak Kullanıcı Kontrolünün Örnek
3D Oyun Tasarımlarında Kullanıcı Denetimi İyileştirilmesi İçin Kinect Algılayıcısı ve Yapay Zekâ Tekniklerinin Kullanımı Microsoft Kinect ile Yapay Zekâ Teknikleri Kullanılarak Kullanıcı Kontrolünün Örnek
Öğr. Gör. Hakan YÜKSEL hakanyuksel@sdu.edu.tr SÜLEYMAN DEMİREL ÜNİVERSİTESİ. Akademik Bilişim 2013 1
 Öğr. Gör. Hakan YÜKSEL hakanyuksel@sdu.edu.tr SÜLEYMAN DEMİREL ÜNİVERSİTESİ Akademik Bilişim 2013 1 İçerik Hareket Temelli İşlemler Temassız hareket algılayıcısı: Kinect Kinect Uygulamaları Kinect in getirdikleri
Öğr. Gör. Hakan YÜKSEL hakanyuksel@sdu.edu.tr SÜLEYMAN DEMİREL ÜNİVERSİTESİ Akademik Bilişim 2013 1 İçerik Hareket Temelli İşlemler Temassız hareket algılayıcısı: Kinect Kinect Uygulamaları Kinect in getirdikleri
TRUE3D. BIL 496 Bitirme Projesi. Ebubekir AKGÜL. Danışman: Yrd.Doç.Dr. Yakup GENÇ. Haziran 2014. GYTE - Bilgisayar Mühendisliği Bölümü
 Bilgisayar Mühendisliği Bölümü TRUE3D BIL 496 Bitirme Projesi Ebubekir AKGÜL Danışman: Yrd.Doç.Dr. Yakup GENÇ Haziran 2014 GYTE - Bilgisayar Mühendisliği Bölümü İçerik Sistem Mimarisi Kinect Server Konum
Bilgisayar Mühendisliği Bölümü TRUE3D BIL 496 Bitirme Projesi Ebubekir AKGÜL Danışman: Yrd.Doç.Dr. Yakup GENÇ Haziran 2014 GYTE - Bilgisayar Mühendisliği Bölümü İçerik Sistem Mimarisi Kinect Server Konum
Akıllı Ortamlarda Sensör Kontrolüne Etmen Tabanlı Bir Yaklaşım: Bir Jadex Uygulaması
 Akıllı Ortamlarda Sensör Kontrolüne Etmen Tabanlı Bir Yaklaşım: Bir Jadex Uygulaması Özlem Özgöbek ozlem.ozgobek@ege.edu.tr Ege Üniversitesi Bilgisayar Mühendisliği Bölümü İZMİR Sunum Planı - Giriş - Benzer
Akıllı Ortamlarda Sensör Kontrolüne Etmen Tabanlı Bir Yaklaşım: Bir Jadex Uygulaması Özlem Özgöbek ozlem.ozgobek@ege.edu.tr Ege Üniversitesi Bilgisayar Mühendisliği Bölümü İZMİR Sunum Planı - Giriş - Benzer
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ. Ders 1- Yapay Zekâya Giriş. Erhan AKDOĞAN, Ph.D.
 Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Mekatronik Mühendisliği Uygulamalarında Yapay Zekâ Ders 1- Yapay Zekâya Giriş Erhan AKDOĞAN, Ph.D. Yapay Zekâ nedir?! İnsanın düşünme ve karar verme yeteneğini bilgisayarlar aracılığı ile taklit etmeye
Bilgisayar Grafiği. Volkan KAVADARLI
 Bilgisayar Grafiği Volkan KAVADARLI 11011032 Bilgisayar Grafiği? Özel bir grafik donanımı ve yazılımının yardımıyla bir bilgisayar tarafından görüntü verisinin temsilini kullanarak oluşturulmuş görüntüler.
Bilgisayar Grafiği Volkan KAVADARLI 11011032 Bilgisayar Grafiği? Özel bir grafik donanımı ve yazılımının yardımıyla bir bilgisayar tarafından görüntü verisinin temsilini kullanarak oluşturulmuş görüntüler.
Fırat Üniversitesi DENEY NO: 8 KINECT İLE İNSAN HAREKETLERİNİN ALGILANMASI
 Fırat Üniversitesi Bilgisayar Mühendisliği BMÜ-431 Bilgisayar Sistemleri Laboratuvarı DENEY NO: 8 KINECT İLE İNSAN HAREKETLERİNİN ALGILANMASI 1. GİRİŞ Eğitim ve öğretimde teknolojik araçların kullanılması,
Fırat Üniversitesi Bilgisayar Mühendisliği BMÜ-431 Bilgisayar Sistemleri Laboratuvarı DENEY NO: 8 KINECT İLE İNSAN HAREKETLERİNİN ALGILANMASI 1. GİRİŞ Eğitim ve öğretimde teknolojik araçların kullanılması,
Otistik Bireylere Kinect İle Davranış Öğretimi
 Otistik Bireylere Kinect İle Davranış Öğretimi Hazırlayanlar Ahmet YILDIZ Yağmur SUBAKAN Dilek SAĞLAM 1 İçindekiler İçindekiler....2 Kinect Nedir?...3 Kinect İçin Donanımsal Gereksinimler...5 Kinect İçin
Otistik Bireylere Kinect İle Davranış Öğretimi Hazırlayanlar Ahmet YILDIZ Yağmur SUBAKAN Dilek SAĞLAM 1 İçindekiler İçindekiler....2 Kinect Nedir?...3 Kinect İçin Donanımsal Gereksinimler...5 Kinect İçin
Esnek Hesaplamaya Giriş
 Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
Esnek Hesaplamaya Giriş J E O L O J İ M Ü H E N D İ S L İ Ğ İ A. B. D. E S N E K H E S A P L A M A Y Ö N T E M L E R İ - I DOÇ. DR. ERSAN KABALCI Esnek Hesaplama Nedir? Esnek hesaplamanın temelinde yatan
BLM/COM 436 Bulanık Mantık
 BLM/COM 436 Bulanık Mantık Bulanık mantık karar verme problemlerinde kullanılmaktadır. Bu projede ev kredisi çekecek bir kişi için evin özellikleri ve krediyi çekecek kişinin bilgileri kullanılarak bankalar
BLM/COM 436 Bulanık Mantık Bulanık mantık karar verme problemlerinde kullanılmaktadır. Bu projede ev kredisi çekecek bir kişi için evin özellikleri ve krediyi çekecek kişinin bilgileri kullanılarak bankalar
Engelliler İçin Akıllı Ev Otomasyon Sistemi
 Engelliler İçin Akıllı Ev Otomasyon Sistemi AKILLI BİNA NEDİR? Akıllı bina, binanın ısıtma, havalandırma, klima, aydınlatma, güvenlik ve diğer sistemler dahil olmak üzere otomatik olarak kontrol edilmesini
Engelliler İçin Akıllı Ev Otomasyon Sistemi AKILLI BİNA NEDİR? Akıllı bina, binanın ısıtma, havalandırma, klima, aydınlatma, güvenlik ve diğer sistemler dahil olmak üzere otomatik olarak kontrol edilmesini
CETP KOMPOZİTLERİN DELİNMELERİNDEKİ İTME KUVVETİNİN ANFIS İLE MODELLENMESİ MURAT KOYUNBAKAN ALİ ÜNÜVAR OKAN DEMİR
 CETP KOMPOZİTLERİN DELİNMELERİNDEKİ İTME KUVVETİNİN ANFIS İLE MODELLENMESİ MURAT KOYUNBAKAN ALİ ÜNÜVAR OKAN DEMİR Çalışmanın amacı. SUNUM PLANI Çalışmanın önemi. Deney numunelerinin üretimi ve özellikleri.
CETP KOMPOZİTLERİN DELİNMELERİNDEKİ İTME KUVVETİNİN ANFIS İLE MODELLENMESİ MURAT KOYUNBAKAN ALİ ÜNÜVAR OKAN DEMİR Çalışmanın amacı. SUNUM PLANI Çalışmanın önemi. Deney numunelerinin üretimi ve özellikleri.
Bulanık Mantık Tabanlı Uçak Modeli Tespiti
 Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
Bulanık Mantık Tabanlı Uçak Modeli Tespiti Hüseyin Fidan, Vildan Çınarlı, Muhammed Uysal, Kadriye Filiz Balbal, Ali Özdemir 1, Ayşegül Alaybeyoğlu 2 1 Celal Bayar Üniversitesi, Matematik Bölümü, Manisa
Sistem Temel. Genel Fonksiyonlar. Sistemleri. Tam Adaptif Trafik Kontrol Sistemi ( j\iti'1)
") Tam Adaptif Trafik Kontrol Sistemi ( j\iti'1) Akıllı Trafik Ağı ve Adaptif Trafik Yönetim Sistemi, hızlı ve güvenli trafik akışını sağlar. /o95 doğruluk oranı ile ölçümler gerçekleştirerek uygun kavşak
Tam Adaptif Trafik Kontrol Sistemi ( j\iti'1) Akıllı Trafik Ağı ve Adaptif Trafik Yönetim Sistemi, hızlı ve güvenli trafik akışını sağlar. /o95 doğruluk oranı ile ölçümler gerçekleştirerek uygun kavşak
BİLGİSAYAR MÜHENDİSLİĞİ DOKTORA DERS PROGRAMI (Lisanstan gelenler için)
") BİLGİSAYAR MÜHENDİSLİĞİ DOKTORA DERS PROGRAMI (Lisanstan gelenler için) HAZIRLIK PROGRAMI COME 27 İleri Nesneye Yönelik Programlama 5 COME 21 Veri Yapıları ve Algoritmalar COME 22 COME 1 COME 1 COME 411
BİLGİSAYAR MÜHENDİSLİĞİ DOKTORA DERS PROGRAMI (Lisanstan gelenler için) HAZIRLIK PROGRAMI COME 27 İleri Nesneye Yönelik Programlama 5 COME 21 Veri Yapıları ve Algoritmalar COME 22 COME 1 COME 1 COME 411
BİLGİSAYAR VE ENFORMASYON BİLİMLERİ YÜKSEK LİSANS DERS PROGRAMI (Tezli Program)
") BİLGİSAYAR VE ENFORMASYON BİLİMLERİ YÜKSEK LİSANS DERS PROGRAMI (Tezli Program) HAZIRLIK PROGRAMI COME 27 İleri Nesneye Yönelik Programlama 2+2 3 5 COME 218 Veri Yapıları ve Algoritmalar 2+2 3 6 COME 226
BİLGİSAYAR VE ENFORMASYON BİLİMLERİ YÜKSEK LİSANS DERS PROGRAMI (Tezli Program) HAZIRLIK PROGRAMI COME 27 İleri Nesneye Yönelik Programlama 2+2 3 5 COME 218 Veri Yapıları ve Algoritmalar 2+2 3 6 COME 226
Gündem. Demo 3D ile Geleceği Görmek. Dijitalis Yazılım ve Danışmanlık Ltd.Şti. www.dijitalis.com
 Gündem Demo 3D ile Geleceği Görmek 1 Dijitalis Dijitalis, stratejik taktiksel ve operasyonel doğru kararlar verebilmek ve dinamik değişiklere çok hızlı adapte olabilmek için entegre çözümler sunar. Tedarik
Gündem Demo 3D ile Geleceği Görmek 1 Dijitalis Dijitalis, stratejik taktiksel ve operasyonel doğru kararlar verebilmek ve dinamik değişiklere çok hızlı adapte olabilmek için entegre çözümler sunar. Tedarik
PROGRAMLAMA NEDİR? Kullanıcıların isteklerini karşılayacak alt yapıyı(kodları) hazırlamaktır.
 hazırlamaktır.") PROGRAMLAMA NEDİR? Kullanıcıların isteklerini karşılayacak alt yapıyı(kodları) hazırlamaktır. ALGORİTMA Bir uygulamanın işlem basamaklarını teker teker yazarak çözümleme ve sonuca varmada izlenecek yoldur.
PROGRAMLAMA NEDİR? Kullanıcıların isteklerini karşılayacak alt yapıyı(kodları) hazırlamaktır. ALGORİTMA Bir uygulamanın işlem basamaklarını teker teker yazarak çözümleme ve sonuca varmada izlenecek yoldur.
Bulanık Mantık Bilgisayar Mühendisliği Bölümü Final Sınavı 27 Mayıs 2014 Süre: 1 Saat 45 Dakika
 AÇIKLAMALAR: 1. Bu sınavda KTÜ Sınav Uygulama Yönergesi uygulanmaktadır. SORU 1. X ve Y uzaylarında tanımlı üçgen yapılı bulanık alt kümeler sırasıyla sol, tepe ve sağ tanım parametrelerine bağlı olarak
AÇIKLAMALAR: 1. Bu sınavda KTÜ Sınav Uygulama Yönergesi uygulanmaktadır. SORU 1. X ve Y uzaylarında tanımlı üçgen yapılı bulanık alt kümeler sırasıyla sol, tepe ve sağ tanım parametrelerine bağlı olarak
ESİS Projesi. Kaynaklar Bakanlığı
 ESİS Projesi Hem ulusal, hem de uluslararası platformda enerji, bir ülkenin politika üretmesi ve uygulaması gereken en önemli stratejik alanlardan birisidir. Ülkemiz de sahip olduğu kritik jeopolitik konumu
ESİS Projesi Hem ulusal, hem de uluslararası platformda enerji, bir ülkenin politika üretmesi ve uygulaması gereken en önemli stratejik alanlardan birisidir. Ülkemiz de sahip olduğu kritik jeopolitik konumu
ENDÜSTRİYEL GÖRÜNTÜ İŞLEME. atel sistem
 endüstriyel görüntü işleme ölçüm ve kontrol leri, tecrübe ve bilgi birikimiyle işletmelerin ihtiyaçlarını en kapsamlı şekilde analiz ederek, en ekonomik ve uygun çözümü sunar. Son yılların vazgeçilmez
endüstriyel görüntü işleme ölçüm ve kontrol leri, tecrübe ve bilgi birikimiyle işletmelerin ihtiyaçlarını en kapsamlı şekilde analiz ederek, en ekonomik ve uygun çözümü sunar. Son yılların vazgeçilmez
Android Telefonlarla Yol Bozukluklarının Takibi: Kitle Kaynaklı Alternatif Çözüm
 Galatasaray Üniversitesi Android Telefonlarla Yol Bozukluklarının Takibi: Kitle Kaynaklı Alternatif Çözüm Mustafa Tekeli, Özlem Durmaz İncel İçerik Giriş Literatür Özeti Sistem Mimarisi / Metodoloji Öncül
Galatasaray Üniversitesi Android Telefonlarla Yol Bozukluklarının Takibi: Kitle Kaynaklı Alternatif Çözüm Mustafa Tekeli, Özlem Durmaz İncel İçerik Giriş Literatür Özeti Sistem Mimarisi / Metodoloji Öncül
Ders Adı : Nesne Tabanlı Programlama-I Ders No : Teorik : 3 Pratik : 1 Kredi : 3.5 ECTS : 4. Ders Bilgileri.
 Image not found http://bologna.konya.edu.tr/panel/images/pdflogo.png Ders Adı : Nesne Tabanlı Programlama-I Ders No : 0690130114 Teorik : 3 Pratik : 1 Kredi : 3.5 ECTS : 4 Ders Bilgileri Ders Türü Öğretim
Image not found http://bologna.konya.edu.tr/panel/images/pdflogo.png Ders Adı : Nesne Tabanlı Programlama-I Ders No : 0690130114 Teorik : 3 Pratik : 1 Kredi : 3.5 ECTS : 4 Ders Bilgileri Ders Türü Öğretim
Bölüm 7 Renkli Görüntü İşleme
 BLM429 Görüntü İşlemeye Giriş Bölüm 7 Renkli Görüntü İşleme Dr. Öğr. Üyesi Caner ÖZCAN Genç sanatçının, rengin sadece tanımlayıcı değil aynı zamanda kişisel ifade anlamına geldiğini anlaması renge dokunmasından
BLM429 Görüntü İşlemeye Giriş Bölüm 7 Renkli Görüntü İşleme Dr. Öğr. Üyesi Caner ÖZCAN Genç sanatçının, rengin sadece tanımlayıcı değil aynı zamanda kişisel ifade anlamına geldiğini anlaması renge dokunmasından
Bilgisayarlı Görü Alanında Bazı Örnek Çalışmalar
 Bilgisayarlı Görü Alanında Bazı Örnek Çalışmalar Ahmet Burak Can Hacettepe Universitesi abc@cs.hacettepe.edu.tr Bilgisayarlı Görüde Bazı Örnek Çalışmalar Beyindeki Lezyonların Otomatik Tespiti İçin Bir
Bilgisayarlı Görü Alanında Bazı Örnek Çalışmalar Ahmet Burak Can Hacettepe Universitesi abc@cs.hacettepe.edu.tr Bilgisayarlı Görüde Bazı Örnek Çalışmalar Beyindeki Lezyonların Otomatik Tespiti İçin Bir
Görünümler ve Ötesi Yaklaşımıyla Radar Yazılım Mimarisi Dokümantasyonu Tecrübeleri. Ali Özzeybek M. Devrim Tokcan Murat Tuncer
 Görünümler ve Ötesi Yaklaşımıyla Radar Yazılım Mimarisi Dokümantasyonu Tecrübeleri Ali Özzeybek M. Devrim Tokcan Murat Tuncer Görünümler ve Ötesi Yaklaşımıyla Radar Yazılım Mimarisi Dokümantasyonu Tecrübeleri
Görünümler ve Ötesi Yaklaşımıyla Radar Yazılım Mimarisi Dokümantasyonu Tecrübeleri Ali Özzeybek M. Devrim Tokcan Murat Tuncer Görünümler ve Ötesi Yaklaşımıyla Radar Yazılım Mimarisi Dokümantasyonu Tecrübeleri
ALP OĞUZ ANADOLU LİSESİ EĞİTİM ÖĞRETİM YILI BİLGİSAYAR BİLİMİ DERSİ 2.DÖNEM 2.SINAV ÖNCESİ ÇALIŞMA SORULARI VE YANITLARI
 ALP OĞUZ ANADOLU LİSESİ 2017-2018 EĞİTİM ÖĞRETİM YILI BİLGİSAYAR BİLİMİ DERSİ 2.DÖNEM 2.SINAV ÖNCESİ ÇALIŞMA SORULARI VE YANITLARI Doğru yanıtlar kırmızı renkte verilmiştir. 1. Problemlerin her zaman sıradan
ALP OĞUZ ANADOLU LİSESİ 2017-2018 EĞİTİM ÖĞRETİM YILI BİLGİSAYAR BİLİMİ DERSİ 2.DÖNEM 2.SINAV ÖNCESİ ÇALIŞMA SORULARI VE YANITLARI Doğru yanıtlar kırmızı renkte verilmiştir. 1. Problemlerin her zaman sıradan
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 9 Stereo Görüntüleme Alp Ertürk alp.erturk@kocaeli.edu.tr Tek Kamera Geometrisi??? x Tek Kamera Geometrisi Tek Kamera Geometrisi İğne Deliği Kamera Modeli ) /, / ( ),, (
Bilgisayarla Görüye Giriş Ders 9 Stereo Görüntüleme Alp Ertürk alp.erturk@kocaeli.edu.tr Tek Kamera Geometrisi??? x Tek Kamera Geometrisi Tek Kamera Geometrisi İğne Deliği Kamera Modeli ) /, / ( ),, (
SmartMessage Kitlenizle Güçlü İlişkiler
 SmartMessage Kitlenizle Güçlü İlişkiler 60+ deneyimli çalışan 2.000+ yerel & küresel müşteri 6 ofis SmartMessage Marketing Platform Müşterilerinize ulaştığınız dijital kanallardan maksimum fayda almanızı
SmartMessage Kitlenizle Güçlü İlişkiler 60+ deneyimli çalışan 2.000+ yerel & küresel müşteri 6 ofis SmartMessage Marketing Platform Müşterilerinize ulaştığınız dijital kanallardan maksimum fayda almanızı
COĞRAFİ BİLGİ SİSTEMLERİ SERVER MİMARİSİ SERVER UYGULAMA GELİŞTİRME EĞİTİMİ
 COĞRAFİ BİLGİ SİSTEMLERİ SERVER MİMARİSİ SERVER UYGULAMA GELİŞTİRME EĞİTİMİ http://facebook.com/esriturkey https://twitter.com/esriturkiye egitim@esriturkey.com.tr Kursun Süresi: 5 Gün 30 Saat COĞRAFİ
COĞRAFİ BİLGİ SİSTEMLERİ SERVER MİMARİSİ SERVER UYGULAMA GELİŞTİRME EĞİTİMİ http://facebook.com/esriturkey https://twitter.com/esriturkiye egitim@esriturkey.com.tr Kursun Süresi: 5 Gün 30 Saat COĞRAFİ
YILDIZ TEKNİK ÜNİVERSİTESİ Mekatronik Mühendisliği. Bitirme Projeleri. 2012-2013 / Bahar Dönemi
 Bitirme Projeleri 2012-2013 / Bahar Dönemi TOP DENGE MEKANIZMASı Öğrenci resmi Bu projede 50x50 cm ebatlarındaki bir levhanın üzerinde yer alan serbest bir topun dışarından gelecek bozucu etkilere rağmen,
Bitirme Projeleri 2012-2013 / Bahar Dönemi TOP DENGE MEKANIZMASı Öğrenci resmi Bu projede 50x50 cm ebatlarındaki bir levhanın üzerinde yer alan serbest bir topun dışarından gelecek bozucu etkilere rağmen,
... rref = 0; lref = 0 f cmu_mx <= 40 Then ' Fuzzy Table-Left l_cmu = ((40 - cmu_mx) * 100) / 40 rref = rref + (20 * l_cmu) / 100 End If If cmu_mx >=
 * 100) / 40 rref = rref + (20 * l_cmu) / 100 End If If cmu_mx >=") ... rref = 0; lref = 0 f cmu_mx
... rref = 0; lref = 0 f cmu_mx
GALATASARAY ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ MÜHENDİSLİK VE TEKNOLOJİ FAKÜLTESİ ÖĞRETİM ÜYELERİ TARAFINDAN YÜRÜTÜLEN PROJELER (2008-2011)
") 08.401.001 08.401.002 08.401.003 Dikkat Seviyesindeki Değişimlerin Elektrofizyolojik Ölçümler İle İzlenmesi PFO(Patent Foramen Ovale) Teşhisinin Bilgisayar Yardımı İle Otomatik Olarak Gerçeklenmesi ve
08.401.001 08.401.002 08.401.003 Dikkat Seviyesindeki Değişimlerin Elektrofizyolojik Ölçümler İle İzlenmesi PFO(Patent Foramen Ovale) Teşhisinin Bilgisayar Yardımı İle Otomatik Olarak Gerçeklenmesi ve
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ 2018/2019 GYY BİTİRME ÇALIŞMASI ÖNERİ FORMU. (Doç.Dr. M.
 KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ 2018/2019 GYY BİTİRME ÇALIŞMASI ÖNERİ FORMU (Doç.Dr. M. Kemal GÜLLÜ) Derinlik kamerası ile alınan modellerin birleştirilmesi Derinlik kamerası,
KOCAELİ ÜNİVERSİTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ 2018/2019 GYY BİTİRME ÇALIŞMASI ÖNERİ FORMU (Doç.Dr. M. Kemal GÜLLÜ) Derinlik kamerası ile alınan modellerin birleştirilmesi Derinlik kamerası,
Simatic PLC Eğitim Kataloğu 2013 Sayfa -1
 Simatic PLC Eğitim Kataloğu 2013 Sayfa -1 Global Otomasyon San. Ve Tic. Ltd. Şti Yukarı Mah. Atatürk Bulvarı Yaman Apt. No:7/4 Kartal İstanbul Tel: 0216-3895250 Fax: 0216-3898275 Kurslarımız Simatic S5
Simatic PLC Eğitim Kataloğu 2013 Sayfa -1 Global Otomasyon San. Ve Tic. Ltd. Şti Yukarı Mah. Atatürk Bulvarı Yaman Apt. No:7/4 Kartal İstanbul Tel: 0216-3895250 Fax: 0216-3898275 Kurslarımız Simatic S5
İNÖNÜ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ 2. SINIF 1. DÖNEM VERİ YAPILARI DERSİ LABORATUAR ÖDEVİ
 İNÖNÜ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ 2. SINIF 1. DÖNEM VERİ YAPILARI DERSİ LABORATUAR ÖDEVİ AD SOYAD: TESLİM TARİHİ: OKUL NO: TESLİM SÜRESİ: 2 hafta ÖDEV NO: 5 1- BANKA
İNÖNÜ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ 2. SINIF 1. DÖNEM VERİ YAPILARI DERSİ LABORATUAR ÖDEVİ AD SOYAD: TESLİM TARİHİ: OKUL NO: TESLİM SÜRESİ: 2 hafta ÖDEV NO: 5 1- BANKA
PROGRAMLAMAYA GİRİŞ. Öğr. Gör. Ayhan KOÇ. Kaynak: Algoritma Geliştirme ve Programlamaya Giriş, Dr. Fahri VATANSEVER, Seçkin Yay.
 PROGRAMLAMAYA GİRİŞ Öğr. Gör. Ayhan KOÇ Kaynak: Algoritma Geliştirme ve Programlamaya Giriş, Dr. Fahri VATANSEVER, Seçkin Yay., 2007 Algoritma ve Programlamaya Giriş, Ebubekir YAŞAR, Murathan Yay., 2011
PROGRAMLAMAYA GİRİŞ Öğr. Gör. Ayhan KOÇ Kaynak: Algoritma Geliştirme ve Programlamaya Giriş, Dr. Fahri VATANSEVER, Seçkin Yay., 2007 Algoritma ve Programlamaya Giriş, Ebubekir YAŞAR, Murathan Yay., 2011
TETRA Teknolojisinde Sanal Şebeke (VPN) Kullanımı. İlter FERAH SELEX Communications
 Kullanımı. İlter FERAH SELEX Communications") TETRA Teknolojisinde Sanal Şebeke (VPN) Kullanımı İlter FERAH SELEX Communications VPN Nedir? Çok kullanıcılı farklı organizasyonların aynı anda şebeke üzerinden, birbirlerinden bağımsız olarak haberleşme
TETRA Teknolojisinde Sanal Şebeke (VPN) Kullanımı İlter FERAH SELEX Communications VPN Nedir? Çok kullanıcılı farklı organizasyonların aynı anda şebeke üzerinden, birbirlerinden bağımsız olarak haberleşme
Teknik Belge WDR. WDR: Wide Dynamic Range Geniş Dinamik Aralık nedir? Niçin Önemlidir? elektronik-guvenlik.com SECURITURK
 Teknik Belge: WDR: Wide Dynamic Range nedir? Niçin Önemlidir? 1 / 10 Teknik Belge WDR WDR: Wide Dynamic Range Geniş Dinamik Aralık nedir? Niçin Önemlidir? 2018 elektronik-guvenlik.com Teknik Belge: WDR:
Teknik Belge: WDR: Wide Dynamic Range nedir? Niçin Önemlidir? 1 / 10 Teknik Belge WDR WDR: Wide Dynamic Range Geniş Dinamik Aralık nedir? Niçin Önemlidir? 2018 elektronik-guvenlik.com Teknik Belge: WDR:
. ROBOTİK VE KODLAMA EĞİTİMİ ÇERÇEVESİNDE ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ DERSİ ÜNİTELENDİRİLMİŞ YILLIK DERS PLANI
 . ROBOTİK VE KODLAMA EĞİTİMİ ÇERÇEVESİNDE 2018 2019 ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ DERSİ ÜNİTELENDİRİLMİŞ YILLIK DERS PLANI Hazırlayan : Özel Öğretim Kurumları Birliği (ÖZKURBİR) Dersin Adı : Bilişim
. ROBOTİK VE KODLAMA EĞİTİMİ ÇERÇEVESİNDE 2018 2019 ÖĞRETİM YILI BİLİŞİM TEKNOLOJİLERİ DERSİ ÜNİTELENDİRİLMİŞ YILLIK DERS PLANI Hazırlayan : Özel Öğretim Kurumları Birliği (ÖZKURBİR) Dersin Adı : Bilişim
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE. Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI
 ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
Data Structures Lab 1 2012-Güz
 Data Structures Lab 1 2012-Güz C# Ortamı Tanıtımı ve Uygulama Geliştirilmesi Visual Studio 2010 Ortamının Temini -NYG'ndan MSDN üyeliği için başvuru dilekçesi alınıp doldurulmalı ve yine NYG'ye teslim
Data Structures Lab 1 2012-Güz C# Ortamı Tanıtımı ve Uygulama Geliştirilmesi Visual Studio 2010 Ortamının Temini -NYG'ndan MSDN üyeliği için başvuru dilekçesi alınıp doldurulmalı ve yine NYG'ye teslim
BULANIK MANTIK (FUZZY LOGIC)
") BULANIK MANTIK (FUZZY LOGIC) Bulanık mantık ilk olarak 1965 yılında Lütfü Aliasker Zade nin yayınladığı bir makalenin sonucu oluşmuş bir mantık yapısıdır ve yayınladığı Fuzzy Sets makalesinde bulanık kümelerin
BULANIK MANTIK (FUZZY LOGIC) Bulanık mantık ilk olarak 1965 yılında Lütfü Aliasker Zade nin yayınladığı bir makalenin sonucu oluşmuş bir mantık yapısıdır ve yayınladığı Fuzzy Sets makalesinde bulanık kümelerin
Yaklaşık Düşünme Teorisi
 Yaklaşık Düşünme Teorisi Zadeh tarafından 1979 yılında öne sürülmüştür. Kesin bilinmeyen veya belirsiz bilgiye dayalı işlemlerde etkili sonuçlar vermektedir. Genellikle bir f fonksiyonu ile x ve y değişkeni
Yaklaşık Düşünme Teorisi Zadeh tarafından 1979 yılında öne sürülmüştür. Kesin bilinmeyen veya belirsiz bilgiye dayalı işlemlerde etkili sonuçlar vermektedir. Genellikle bir f fonksiyonu ile x ve y değişkeni
1_ Dingil Sayım Sistemi l
 1_ Dingil Sayım Sistemi l Manyetik algılama prensibine dayalı dingil sayımı ile hat üzerinde herhangi bir izolasyon ve kesme işlemi gerektirmeden algılama gerçekleştirilir. Böylelikle, raylar üzerinden
1_ Dingil Sayım Sistemi l Manyetik algılama prensibine dayalı dingil sayımı ile hat üzerinde herhangi bir izolasyon ve kesme işlemi gerektirmeden algılama gerçekleştirilir. Böylelikle, raylar üzerinden
Albert Long Hall, Boğazi 4-55 Nisan 2008
 Sıkca Karşılaştığım Sorular Robotumu Büyütüyorum Makineler düşünebilir ya da hissedebilir mi? Kendiliklerinden yeni beceriler edinebilirler mi? Vücut, beyin ve dış ortamın etkileşimi sorunlara yeni ve
Sıkca Karşılaştığım Sorular Robotumu Büyütüyorum Makineler düşünebilir ya da hissedebilir mi? Kendiliklerinden yeni beceriler edinebilirler mi? Vücut, beyin ve dış ortamın etkileşimi sorunlara yeni ve
2015/2016 Bahar Yarıyılı Bitirme Çalışması Konuları. (Doç.Dr. M. Kemal GÜLLÜ)
") 2015/2016 Bahar Yarıyılı Bitirme Çalışması Konuları (Doç.Dr. M. Kemal GÜLLÜ) 1. Ses temelli malzeme tanıma Malzemelerin çarpma etkisi ile çıkarttıkları seslerin mikrofon ile bir PC ye alınması ve işaretten
2015/2016 Bahar Yarıyılı Bitirme Çalışması Konuları (Doç.Dr. M. Kemal GÜLLÜ) 1. Ses temelli malzeme tanıma Malzemelerin çarpma etkisi ile çıkarttıkları seslerin mikrofon ile bir PC ye alınması ve işaretten
Mühendislik Tasarım-3 ve Bitirme Çalışması Konuları
 2018-2019 Güz Yarıyılı Mühendislik Tasarım-3 ve Bitirme Çalışması Konuları Dr.Öğr.Üyesi Anıl Çelebi OV7670 kamera üzerinden VGA üzerinden görüntü aktarma ve video sinyal işleme. Bu çalışmada OV7670 sensöründen
2018-2019 Güz Yarıyılı Mühendislik Tasarım-3 ve Bitirme Çalışması Konuları Dr.Öğr.Üyesi Anıl Çelebi OV7670 kamera üzerinden VGA üzerinden görüntü aktarma ve video sinyal işleme. Bu çalışmada OV7670 sensöründen
Lastiklerin Çeki Performansı İçin Bulanık Uzman Sistem Tasarımı
 Tarım Makinaları Bilimi Dergisi 2005, 1 (1), 63-68 Lastiklerin Çeki Performansı İçin Bulanık Uzman Sistem Tasarımı Kazım ÇARMAN, Ali Yavuz ŞEFLEK S.Ü. Ziraat Fakültesi Tarım Makinaları Bölümü, Konya kcarman@selcuk.edu.tr
Tarım Makinaları Bilimi Dergisi 2005, 1 (1), 63-68 Lastiklerin Çeki Performansı İçin Bulanık Uzman Sistem Tasarımı Kazım ÇARMAN, Ali Yavuz ŞEFLEK S.Ü. Ziraat Fakültesi Tarım Makinaları Bölümü, Konya kcarman@selcuk.edu.tr
Prof. Dr. Oğuzhan Urhan GYY Müh.Tas 3 ve Tez Konusu Önerileri
 Prof. Dr. Oğuzhan Urhan 2018-2019 GYY Müh.Tas 3 ve Tez Konusu Önerileri Mobil platformlarda Derin Öğrenme (Deep Learning) uygulaması Geleneksel örüntü tanıma yaklaşımları yerine geçmeye başlayan derin
Prof. Dr. Oğuzhan Urhan 2018-2019 GYY Müh.Tas 3 ve Tez Konusu Önerileri Mobil platformlarda Derin Öğrenme (Deep Learning) uygulaması Geleneksel örüntü tanıma yaklaşımları yerine geçmeye başlayan derin
BULANIK MANTIK ile KONTROL
 BULANIK MANTIK ile KONTROL AFYON KOCATEPE ÜNİVERSİTESİ Bulanık mantığın temel prensipleri: Bulanık küme sözel değişkenleri göstermek için kullanılır. Az sıcak, biraz soğuk gibi bulanık mantık üyelik fonksiyonları
BULANIK MANTIK ile KONTROL AFYON KOCATEPE ÜNİVERSİTESİ Bulanık mantığın temel prensipleri: Bulanık küme sözel değişkenleri göstermek için kullanılır. Az sıcak, biraz soğuk gibi bulanık mantık üyelik fonksiyonları
DEVLET PLANLAMA TEŞKİLATI BİLGİ TOPLUMU DAİRESİ BAŞKANLIĞI. e-yazışma Projesi. Paket Yapısı
 DEVLET PLANLAMA TEŞKİLATI BİLGİ TOPLUMU DAİRESİ BAŞKANLIĞI e-yazışma Projesi Paket Yapısı 11/04/2011 İçindekiler 1. Giriş... 2 2. Paket Yapısı... 2 2.1. Paket Bileşenleri... 2 2.2. Senaryo... 6 1 1. Giriş
DEVLET PLANLAMA TEŞKİLATI BİLGİ TOPLUMU DAİRESİ BAŞKANLIĞI e-yazışma Projesi Paket Yapısı 11/04/2011 İçindekiler 1. Giriş... 2 2. Paket Yapısı... 2 2.1. Paket Bileşenleri... 2 2.2. Senaryo... 6 1 1. Giriş
MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI
 MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI Mekatronik Mühendisliği Yüksek Lisans programının eğitim dili İngilizce olup, tezli ve tezsiz iki programdan oluşmaktadır. Tezli programda öğrencilerin; -
MEKATRONİK MÜHENDİSLİĞİ YÜKSEK LİSANS PROGRAMI Mekatronik Mühendisliği Yüksek Lisans programının eğitim dili İngilizce olup, tezli ve tezsiz iki programdan oluşmaktadır. Tezli programda öğrencilerin; -
FOCUS KABLOSUZ ALARM SİSTEMİ MODEL : ST-IIIB
 FOCUS KABLOSUZ ALARM SİSTEMİ MODEL : ST-IIIB TEKNİK ÖZELLİKLER 8 bölge kablolu, 32 bölge kablosuz toplam 40 bölge Türkçe sesli yönlendirme özelliği, 85 db dahili siren Sökülmelere karşı tamper swich PTSN
FOCUS KABLOSUZ ALARM SİSTEMİ MODEL : ST-IIIB TEKNİK ÖZELLİKLER 8 bölge kablolu, 32 bölge kablosuz toplam 40 bölge Türkçe sesli yönlendirme özelliği, 85 db dahili siren Sökülmelere karşı tamper swich PTSN
GALATASARAY ÜNİVERSİTESİ BİLİMSEL ARAŞTIRMA PROJELERİ MÜHENDİSLİK VE TEKNOLOJİ FAKÜLTESİ ÖĞRETİM ÜYELERİ TARAFINDAN YÜRÜTÜLEN PROJELER (2008-2011)
") 08.401.001 08.401.002 08.401.003 Dikkat Seviyesindeki Değişimlerin Elektrofizyolojik Ölçümler İle İzlenmesi PFO(Patent Foramen Ovale) Teşhisinin Bilgisayar Yardımı İle Otomatik Olarak Gerçeklenmesi ve
08.401.001 08.401.002 08.401.003 Dikkat Seviyesindeki Değişimlerin Elektrofizyolojik Ölçümler İle İzlenmesi PFO(Patent Foramen Ovale) Teşhisinin Bilgisayar Yardımı İle Otomatik Olarak Gerçeklenmesi ve
INTERFACE KULLANIM KILAVUZU.
 INTERFACE KULLANIM KILAVUZU www.necvox.com Ana Menü Fonksiyonları 1. Opel Insignia araçta kullanıyorsanız, ana menüye geçmek için Geri tuşuna basılı tutun. 2. Volkswagen & Skoda ve Seat araçlarda kullanıyorsanız,
INTERFACE KULLANIM KILAVUZU www.necvox.com Ana Menü Fonksiyonları 1. Opel Insignia araçta kullanıyorsanız, ana menüye geçmek için Geri tuşuna basılı tutun. 2. Volkswagen & Skoda ve Seat araçlarda kullanıyorsanız,
Bilgisayarın Kullanım Alanları Nelerdir?
 BİLGİSAYAR NEDİR? Bilgisayarın Kullanım Alanları Nelerdir? ŞEYDA BETÜL KÖSE UFUK TAŞDURMAZLI 1 www.bilgisayarnedir.net 2 Bilgisayarın Kullanım Alanları Nelerdir? Bilgisayarın Kullanım Alanları Nelerdir?
BİLGİSAYAR NEDİR? Bilgisayarın Kullanım Alanları Nelerdir? ŞEYDA BETÜL KÖSE UFUK TAŞDURMAZLI 1 www.bilgisayarnedir.net 2 Bilgisayarın Kullanım Alanları Nelerdir? Bilgisayarın Kullanım Alanları Nelerdir?
İlk Yapay Sinir Ağları. Dr. Hidayet Takçı
 İlk Yapay Sinir Ağları Dr. Hidayet htakci@gmail.com http://htakci.sucati.org Tek katmanlı algılayıcılar (TKA) Perceptrons (Rosenblat) ADALINE/MADALINE (Widrow and Hoff) 2 Perseptron eptronlar Basit bir
İlk Yapay Sinir Ağları Dr. Hidayet htakci@gmail.com http://htakci.sucati.org Tek katmanlı algılayıcılar (TKA) Perceptrons (Rosenblat) ADALINE/MADALINE (Widrow and Hoff) 2 Perseptron eptronlar Basit bir
Bilgisayar Programlama MATLAB
 What is a computer??? Bilgisayar Programlama MATLAB Prof. Dr. İrfan KAYMAZ What Konular is a computer??? MATLAB ortamının tanıtımı Matlab sistemi (ara yüzey tanıtımı) a) Geliştirme ortamı b) Komut penceresi
What is a computer??? Bilgisayar Programlama MATLAB Prof. Dr. İrfan KAYMAZ What Konular is a computer??? MATLAB ortamının tanıtımı Matlab sistemi (ara yüzey tanıtımı) a) Geliştirme ortamı b) Komut penceresi
Şirketin Tanıtımı Huger
 Şirketin Tanıtımı Huger Endoscopy Instruments Co., Ltd., medikal video endoskopların geliştirilmesine yönelik bir imalat şirketidir. Firmamız, Çin Bilim ve Teknoloji Bakanlığı tarafından, medikal endoskopi
Şirketin Tanıtımı Huger Endoscopy Instruments Co., Ltd., medikal video endoskopların geliştirilmesine yönelik bir imalat şirketidir. Firmamız, Çin Bilim ve Teknoloji Bakanlığı tarafından, medikal endoskopi
Bulanık Mantık Bilgisayar Mühendisliği Bölümü Arasınav - 11 Nisan 2014 Süre: 1 Saat 30 Dakika
 SORU 1 (20P). Bir tartı aletinin kalibrasyonunu yapmak üzere kurulan düzenekte, kalibrasyon katası ±10 gram arasında bakılmaktadır. Öyleki -10 ve altı kesinlikle NEGATİF BÜYÜK hata, +10 ve üstü kesinlikle
SORU 1 (20P). Bir tartı aletinin kalibrasyonunu yapmak üzere kurulan düzenekte, kalibrasyon katası ±10 gram arasında bakılmaktadır. Öyleki -10 ve altı kesinlikle NEGATİF BÜYÜK hata, +10 ve üstü kesinlikle
Elektrik-Elektronik Mühendisliği Yüksek Lisans Programı. http://fbe.ieu.edu.tr
 Elektrik-Elektronik Mühendisliği Yüksek Lisans Programı http://fbe.ieu.edu.tr Vizyonumuz; Yürütülmekte olan lisansüstü eğitim programları, bilimsel araştırma ve etkinlikleri ile ulusal ve uluslararası
Elektrik-Elektronik Mühendisliği Yüksek Lisans Programı http://fbe.ieu.edu.tr Vizyonumuz; Yürütülmekte olan lisansüstü eğitim programları, bilimsel araştırma ve etkinlikleri ile ulusal ve uluslararası
KARBON ve CANLILARDAKİ MOLEKÜL ÇEŞİTLİLİĞİ
 KARBON ve CANLILARDAKİ MOLEKÜL ÇEŞİTLİLİĞİ Karbonun önemi Hücrenin % 70-95ʼ i sudan ibaret olup, geri kalan kısmın çoğu karbon içeren bileşiklerdir. Canlılığı oluşturan organik bileşiklerde karbon atomuna
KARBON ve CANLILARDAKİ MOLEKÜL ÇEŞİTLİLİĞİ Karbonun önemi Hücrenin % 70-95ʼ i sudan ibaret olup, geri kalan kısmın çoğu karbon içeren bileşiklerdir. Canlılığı oluşturan organik bileşiklerde karbon atomuna
BİLGİ GÜVENLİĞİ VE FARKINDALIK WEB SİTESİ KULLANIM KILAVUZU
 1 BİLGİ GÜVENLİĞİ VE FARKINDALIK WEB SİTESİ KULLANIM KILAVUZU Günümüzde kurumlar ve bireylerin sahip olduğu en değerli varlıkları olan bilginin; gizlilik, bütünlük ve erişilebilirlik nitelikleri bakımından
1 BİLGİ GÜVENLİĞİ VE FARKINDALIK WEB SİTESİ KULLANIM KILAVUZU Günümüzde kurumlar ve bireylerin sahip olduğu en değerli varlıkları olan bilginin; gizlilik, bütünlük ve erişilebilirlik nitelikleri bakımından
Sanal Ortamda Nesnelerin Haptic Kol ile Manipülasyonu. Sevcan AYTEKİN Alpaslan DUYSAK
 Sanal Ortamda Nesnelerin Haptic Kol ile Manipülasyonu Sevcan AYTEKİN Alpaslan DUYSAK İÇERİK Amaç Sanal Ortam Sanal Ortam Aygıtları Uygulama Alanları Üç Boyutlu Modelleme (3B) OpenGL, 3Dmax Sanal Ortamın
Sanal Ortamda Nesnelerin Haptic Kol ile Manipülasyonu Sevcan AYTEKİN Alpaslan DUYSAK İÇERİK Amaç Sanal Ortam Sanal Ortam Aygıtları Uygulama Alanları Üç Boyutlu Modelleme (3B) OpenGL, 3Dmax Sanal Ortamın
Bilgisayarla Görüye Giriş
 Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk alp.erturk@kocaeli.edu.tr Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Bilgisayarla Görüye Giriş Ders 5 Görüntü Süzgeçleme ve Gürültü Giderimi Alp Ertürk alp.erturk@kocaeli.edu.tr Motivasyon: Gürültü Giderimi Bir kamera ve sabit bir sahne için gürültüyü nasıl azaltabiliriz?
Harf Eğitimi İçin İnteraktif Kinect Uygulaması
 Harf Eğitimi İçin İnteraktif Kinect Uygulaması Mehmet Emin Tenekeci 1, Abdülkadir Gümüşçü 2, Ömer Ağırman 1 1 Harran Üniversitesi, Bilgisayar Mühendisliği Bölümü, Şanlıurfa 2 Harran Üniversitesi, Elektrik-Elektronik
Harf Eğitimi İçin İnteraktif Kinect Uygulaması Mehmet Emin Tenekeci 1, Abdülkadir Gümüşçü 2, Ömer Ağırman 1 1 Harran Üniversitesi, Bilgisayar Mühendisliği Bölümü, Şanlıurfa 2 Harran Üniversitesi, Elektrik-Elektronik
(Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.
 HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK KONTROLÜ. DENEY SORUMLUSU Arş.Gör.") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 3) HAVA KÜTLE AKIŞ SİSTEMLERİNDE PID İLE SICAKLIK
15H. 17 Otomatik şerit algılama sistemi, durum. 18 Uyarı mesajları çıkışı, talep 14K. 3 Kombi şalter, durum
 Uç 5, durum 3E 0 Direksiyon kolonu ayarı şalteri, durum 0 Direksiyon kolonu ayarı şalteri, durum TEMPOMAT kolu, sinyal 4G TEMPOMAT kolu, sinyal 4H 4J J 4G 23D 22D 24D 22D 6 Direksiyon simidi titreme motoru,
Uç 5, durum 3E 0 Direksiyon kolonu ayarı şalteri, durum 0 Direksiyon kolonu ayarı şalteri, durum TEMPOMAT kolu, sinyal 4G TEMPOMAT kolu, sinyal 4H 4J J 4G 23D 22D 24D 22D 6 Direksiyon simidi titreme motoru,
BİTİRME ÖDEVİ KONU BİLDİRİM FORMU
 Öğretim Elemanın Adı Soyadı: Prof. Dr. Ali KOKANGÜL BİTİRME ÖDEVİ 1 Yalın üretim a, b, c, d 2 Malzeme stok optimizasyonu a, b, c, 3 Yaratıcı düşünce ve fikir üretme a, b, c, d 4 Matematiksel modelleme
Öğretim Elemanın Adı Soyadı: Prof. Dr. Ali KOKANGÜL BİTİRME ÖDEVİ 1 Yalın üretim a, b, c, d 2 Malzeme stok optimizasyonu a, b, c, 3 Yaratıcı düşünce ve fikir üretme a, b, c, d 4 Matematiksel modelleme
DIV KAVRAMI <style> position: absolute
 DIV KAVRAMI Div tag i katman oluşturmak için kullanılır. Div ler sayfanın komple bir satırını kaplarlar, bu yüzden tag i içerisinde şekillendirilip, boyutlandırılmaları gerekir. Aşağıdaki şekilde
DIV KAVRAMI Div tag i katman oluşturmak için kullanılır. Div ler sayfanın komple bir satırını kaplarlar, bu yüzden tag i içerisinde şekillendirilip, boyutlandırılmaları gerekir. Aşağıdaki şekilde
2017 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / ENDÜSTRİ MÜHENDİSLİĞİ EĞİTİM PLANI. Ders Kodu Ders Adı (Türkçe) Müf.No T P K AKTS Tip Op.
 Müf.No T P K AKTS Tip Op.") 2017 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / ENDÜSTRİ MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ Aİ 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2017 2 0 2 2 Z ENM 101 MATEMATİK-I 2017 4 0 6 6 Z ENM 103 FİZİK-I
2017 MÜFREDATI MÜHENDİSLİK FAKÜLTESİ / ENDÜSTRİ MÜHENDİSLİĞİ EĞİTİM PLANI SINIF: 1 DÖNEM: GÜZ Aİ 101 ATATÜRK İLKELERİ VE İNKILAP TARİHİ-I 2017 2 0 2 2 Z ENM 101 MATEMATİK-I 2017 4 0 6 6 Z ENM 103 FİZİK-I
Bu Kitap Kime Hitap Eder? 2 Kitapta Nelerden Bahsedilmiştir? 3 Kitabı Takip Edebilmek için Nelere İhtiyaç Duyacaksınız?
 İÇİNDEKİLER VII İÇİNDEKİLER 1 GİRİŞ 1 Bu Kitap Kime Hitap Eder? 2 Kitapta Nelerden Bahsedilmiştir? 3 Kitabı Takip Edebilmek için Nelere İhtiyaç Duyacaksınız? 4 Kaynak Kodu 5 2 MERHABA DÜNYA 7 Android Nedir?
İÇİNDEKİLER VII İÇİNDEKİLER 1 GİRİŞ 1 Bu Kitap Kime Hitap Eder? 2 Kitapta Nelerden Bahsedilmiştir? 3 Kitabı Takip Edebilmek için Nelere İhtiyaç Duyacaksınız? 4 Kaynak Kodu 5 2 MERHABA DÜNYA 7 Android Nedir?
BMT 101 Algoritma ve Programlama I 11. Hafta. Yük. Müh. Köksal Gündoğdu 1
 BMT 101 Algoritma ve Programlama I 11. Hafta Yük. Müh. Köksal Gündoğdu 1 C++ Fonksiyonlar Yük. Müh. Köksal Gündoğdu 2 C++ Hazır Fonksiyonlar Yük. Müh. Köksal Gündoğdu 3 C++ Hazır Fonksiyonlar 1. Matematiksel
BMT 101 Algoritma ve Programlama I 11. Hafta Yük. Müh. Köksal Gündoğdu 1 C++ Fonksiyonlar Yük. Müh. Köksal Gündoğdu 2 C++ Hazır Fonksiyonlar Yük. Müh. Köksal Gündoğdu 3 C++ Hazır Fonksiyonlar 1. Matematiksel
2013-14 GÜZ YY. - MKT103 - GÖRSEL PROGRAMLAMA DERSİ - ARA SINAVI
 2013-14 GÜZ YY. - MKT103 - GÖRSEL PROGRAMLAMA DERSİ - ARA SINAVI KOÜ Mekatronik Mühendisliği Bölümü/MKT-103-Görsel Programlama Dersi - Ara Sınav J-grubu Ad-Soyad:...No:... J GRUBU-süre:70dk 1.) Aşağıdaki
2013-14 GÜZ YY. - MKT103 - GÖRSEL PROGRAMLAMA DERSİ - ARA SINAVI KOÜ Mekatronik Mühendisliği Bölümü/MKT-103-Görsel Programlama Dersi - Ara Sınav J-grubu Ad-Soyad:...No:... J GRUBU-süre:70dk 1.) Aşağıdaki
BİLGİSAYAR PROGRAMLARININ TASARIMLARINDAKİ VE KODLARINDAKİ SORUNLARIN BELİRLENMESİ ALPER FİLİZ MEHMET ALİ SERT
 BİLGİSAYAR PROGRAMLARININ TASARIMLARINDAKİ VE KODLARINDAKİ SORUNLARIN BELİRLENMESİ ALPER FİLİZ 040080202 MEHMET ALİ SERT 040090521 SUNUM İÇERİĞİ Problem Tanımı Tespit Edilen Sorunlar Problemin Sonuçları
BİLGİSAYAR PROGRAMLARININ TASARIMLARINDAKİ VE KODLARINDAKİ SORUNLARIN BELİRLENMESİ ALPER FİLİZ 040080202 MEHMET ALİ SERT 040090521 SUNUM İÇERİĞİ Problem Tanımı Tespit Edilen Sorunlar Problemin Sonuçları
Çoktan Seçmeli Değerlendirme Soruları Akış Şemaları İle Algoritma Geliştirme Örnekleri Giriş 39 1.Gündelik Hayattan Algoritma Örnekleri 39 2.Say
 İÇİNDEKİLER 1. Bilgisayarın Yapısı Ve Programlama Dilleri Giriş 1 Bilgisayar ve Programlamanın Kısa Bir Tarihçesi 2 Donanım ve Yazılım Kavramları 3 Bilgisayarın Donanımsal yapısı 4 Giriş Birimi (Input
İÇİNDEKİLER 1. Bilgisayarın Yapısı Ve Programlama Dilleri Giriş 1 Bilgisayar ve Programlamanın Kısa Bir Tarihçesi 2 Donanım ve Yazılım Kavramları 3 Bilgisayarın Donanımsal yapısı 4 Giriş Birimi (Input
İÇİNDEKİLER 1 SENARYO 1
 İÇİNDEKİLER IX İÇİNDEKİLER 1 SENARYO 1 2 İŞLETME YAPISI 5 İşletme Yapısının Tanımlanması 5 Satış Organizasyonu 5 Dağıtım Kanalı 14 Bölüm 15 Satış Bürosu 17 Satış Grubu 19 Sevkiyat Noktası 21 İşletme Yapısı
İÇİNDEKİLER IX İÇİNDEKİLER 1 SENARYO 1 2 İŞLETME YAPISI 5 İşletme Yapısının Tanımlanması 5 Satış Organizasyonu 5 Dağıtım Kanalı 14 Bölüm 15 Satış Bürosu 17 Satış Grubu 19 Sevkiyat Noktası 21 İşletme Yapısı
Ö DÜNSÜZ & VERİ M Lİ. CADstar yeni tarayıcı jenerasyonu
 Ö DÜNSÜZ & VERİ M Lİ CADstar yeni tarayıcı jenerasyonu EN YÜKSEK BEKLENTİLER İÇİN PREMIUM TARAYICI Olgunlaşmış teknoloji, tavizsiz verimlilik ve kusursuz tasarım Pro" serisinin özellikleridir. "CS ULTRA
Ö DÜNSÜZ & VERİ M Lİ CADstar yeni tarayıcı jenerasyonu EN YÜKSEK BEKLENTİLER İÇİN PREMIUM TARAYICI Olgunlaşmış teknoloji, tavizsiz verimlilik ve kusursuz tasarım Pro" serisinin özellikleridir. "CS ULTRA
ISITMA Fiyat Listesi 2015. 1 Ocak 2015 tarihinden itibaren geçerlidir.
 ISITMA Fiyat Listesi 2015 1 Ocak 2015 tarihinden itibaren geçerlidir. 1 Sayfa Lago 0321 Isı Kontrol Paneli E8.4401 Kaskad Kontrol Paneli Lago SG Solar Kontrol Paneli 3 4 6 Arda ÜLGEN 2 Heating controllers
ISITMA Fiyat Listesi 2015 1 Ocak 2015 tarihinden itibaren geçerlidir. 1 Sayfa Lago 0321 Isı Kontrol Paneli E8.4401 Kaskad Kontrol Paneli Lago SG Solar Kontrol Paneli 3 4 6 Arda ÜLGEN 2 Heating controllers
Alarm Sistemleri Teknik Eğitim
 Alarm Sistemleri Teknik Eğitim İçerik Teknik Eğitim Sensör yapısı ve kurulumu Kablolama Panel diyagramı PC üzerinden programlama Tuş takımı üzerinden programlama 2 Teknik Eğitim Etkinleştirme Modları Gece
Alarm Sistemleri Teknik Eğitim İçerik Teknik Eğitim Sensör yapısı ve kurulumu Kablolama Panel diyagramı PC üzerinden programlama Tuş takımı üzerinden programlama 2 Teknik Eğitim Etkinleştirme Modları Gece
Devlet Demiryolları için Maliyet Tabanlı Rekabetçi Fiyatlandırma Sistemi (MATRİS) Selim Çetiner Serhan Turhan - 9 Aralık 2014, Salı
 Selim Çetiner Serhan Turhan - 9 Aralık 2014, Salı") Devlet Demiryolları için Maliyet Tabanlı Rekabetçi Fiyatlandırma Sistemi (MATRİS) Selim Çetiner Serhan Turhan - 9 Aralık 2014, Salı MATRİS Gündem Maliyet Tabanlı Rekabetçi Fiyatlandırma Sisteminin İhtiyaç
Devlet Demiryolları için Maliyet Tabanlı Rekabetçi Fiyatlandırma Sistemi (MATRİS) Selim Çetiner Serhan Turhan - 9 Aralık 2014, Salı MATRİS Gündem Maliyet Tabanlı Rekabetçi Fiyatlandırma Sisteminin İhtiyaç
C3S Komuta Kontrol ve Sibernetik Sistemler Ltd. Şti. ŞİRKET BİLGİLERİ VE TANITIMI
 C3S Komuta Kontrol ve Sibernetik Sistemler Ltd. Şti. ŞİRKET BİLGİLERİ VE TANITIMI 1. C3S Komuta Kontrol ve Sibernetik Sistemler (Command Control & Cybernetics Systems) Ltd. Şti. 2007 yılında kurulmuş aynı
C3S Komuta Kontrol ve Sibernetik Sistemler Ltd. Şti. ŞİRKET BİLGİLERİ VE TANITIMI 1. C3S Komuta Kontrol ve Sibernetik Sistemler (Command Control & Cybernetics Systems) Ltd. Şti. 2007 yılında kurulmuş aynı
Aydınlatma ve İç Tesisat Laboratuvarı Demo II KNX
 Aydınlatma ve İç Tesisat Laboratuvarı Demo II KNX KNX eski kontrol sistemlerinde ayrı ayrı kontrol edilen fonksiyonları tek bir çatı altına toplar. KNX Nedir? Enerji Kullanımında Sektörel Dağılım Enerji
Aydınlatma ve İç Tesisat Laboratuvarı Demo II KNX KNX eski kontrol sistemlerinde ayrı ayrı kontrol edilen fonksiyonları tek bir çatı altına toplar. KNX Nedir? Enerji Kullanımında Sektörel Dağılım Enerji
1 GİRİŞ 1 Bu Kitap Kime Hitap Eder? 2 Kitapta Nelerden Bahsedilmiştir? 3 Kitabı Takip Edebilmek için Nelere İhtiyaç Duyacaksınız?
 İÇİNDEKİLER V İÇİNDEKİLER 1 GİRİŞ 1 Bu Kitap Kime Hitap Eder? 2 Kitapta Nelerden Bahsedilmiştir? 3 Kitabı Takip Edebilmek için Nelere İhtiyaç Duyacaksınız? 4 Kaynak Kodu 4 2 MERHABA DÜNYA 7 Android Nedir?
İÇİNDEKİLER V İÇİNDEKİLER 1 GİRİŞ 1 Bu Kitap Kime Hitap Eder? 2 Kitapta Nelerden Bahsedilmiştir? 3 Kitabı Takip Edebilmek için Nelere İhtiyaç Duyacaksınız? 4 Kaynak Kodu 4 2 MERHABA DÜNYA 7 Android Nedir?
perculus Sanal Sınıf Sistemi
 www.globax.com.tr perculus Sanal Sınıf Sistemi 2012 Perculus Hakkında www.globax.com.tr Perculus farklı yerlerdeki insanların ses, görüntü ve sunum olanaklarını kullanarak bilgi alışverişi yapmalarını
www.globax.com.tr perculus Sanal Sınıf Sistemi 2012 Perculus Hakkında www.globax.com.tr Perculus farklı yerlerdeki insanların ses, görüntü ve sunum olanaklarını kullanarak bilgi alışverişi yapmalarını
GİRDİALIMI. Sistemin işleyişinde gereksinim duyulan verilerin sisteme girişinin yapılabilmesi için öncelikle toplanmaları gerekmektedir.
 GİRDİ TASARIMI GİRDİ TASARIMI Geliştirilenyazılımın güvenilir ve geçerli bir yazılım olabilmesi iyi bir girdi tasarımı ile olanaklıdır. Diğer taraftan geliştirilen yazılımlar için kullanışlılık sahip olunması
GİRDİ TASARIMI GİRDİ TASARIMI Geliştirilenyazılımın güvenilir ve geçerli bir yazılım olabilmesi iyi bir girdi tasarımı ile olanaklıdır. Diğer taraftan geliştirilen yazılımlar için kullanışlılık sahip olunması
Yrd. Doç. Dr. A. Burak İNNER
 Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Yrd. Doç. Dr. A. Burak İNNER Kocaeli Üniversitesi Bilgisayar Mühendisliği Yapay Zeka ve Benzetim Sistemleri Ar-Ge Lab. http://yapbenzet.kocaeli.edu.tr DOĞRUSAL OLMAYAN (NONLINEAR) DENKLEM SİSTEMLERİ Mühendisliğin
Dijital Uydu Alıcılarının Beden Hareketlerinin Ve Ses Komutlarının Algılanmasıyla Kontrol Edilip Uzaktan Erişim İle Kullanım Kolaylığının Sağlanması
 Dijital Uydu Alıcılarının Beden Hareketlerinin Ve Ses Komutlarının Algılanmasıyla Kontrol Edilip Uzaktan Erişim İle Kullanım Kolaylığının Sağlanması Serdar AĞLAMIŞ 1 Murat KÖPRÜLÜ 1 Umut Engin AYTEN 2
Dijital Uydu Alıcılarının Beden Hareketlerinin Ve Ses Komutlarının Algılanmasıyla Kontrol Edilip Uzaktan Erişim İle Kullanım Kolaylığının Sağlanması Serdar AĞLAMIŞ 1 Murat KÖPRÜLÜ 1 Umut Engin AYTEN 2
KULLANIM KILAVUZU Basınç Ölçer PCE-P-01-05
 KULLANIM KILAVUZU Basınç Ölçer PCE-P-01-05 Versiyon 1.1 Oluşturma Tarihi: 22/09/2016 İçindekiler 1 Giriş... 3 2 Güvenlik Bilgisi... 3 3 Özellikler... 4 4 Sistem Açıklaması... 5 4.1 TUŞLAR... 5 4.2 Ekran...
KULLANIM KILAVUZU Basınç Ölçer PCE-P-01-05 Versiyon 1.1 Oluşturma Tarihi: 22/09/2016 İçindekiler 1 Giriş... 3 2 Güvenlik Bilgisi... 3 3 Özellikler... 4 4 Sistem Açıklaması... 5 4.1 TUŞLAR... 5 4.2 Ekran...
1. LabVIEW ile Programlama
 1. LabVIEW ile Programlama LabVIEW ile programlama mantığı, program kodu yazılan programlama mantığına benzemekle birlikte, kontrol adı verilen nesneler arasında veri yolu bağlantısı ile program akışı
1. LabVIEW ile Programlama LabVIEW ile programlama mantığı, program kodu yazılan programlama mantığına benzemekle birlikte, kontrol adı verilen nesneler arasında veri yolu bağlantısı ile program akışı
Matematik ve Geometri Eğitiminde Teknoloji Tabanlı Yaklaşımlar
 Matematik ve Geometri Eğitiminde Teknoloji Tabanlı Yaklaşımlar Dr. Enis Karaarslan Dr. Burçak Boz Dr. Kasım Yıldırım Bilgisayar Mühendisliği Ortaöğretim Fen ve Matematik Sınıf Öğretmenliği Bölümü Alanlar
Matematik ve Geometri Eğitiminde Teknoloji Tabanlı Yaklaşımlar Dr. Enis Karaarslan Dr. Burçak Boz Dr. Kasım Yıldırım Bilgisayar Mühendisliği Ortaöğretim Fen ve Matematik Sınıf Öğretmenliği Bölümü Alanlar
PR362009 24 Kasım 2009 Yazılım, PC-tabanlı kontrol Sayfa 1 / 5
 Yazılım, PC-tabanlı kontrol Sayfa 1 / 5 IT standartları otomasyonu geliştiriyor: Microsoft Visual Studio entegrasyonlu TwinCAT programlama ortamı TwinCAT 3 extended Automation Beckhoff, otomasyon dünyasını
Yazılım, PC-tabanlı kontrol Sayfa 1 / 5 IT standartları otomasyonu geliştiriyor: Microsoft Visual Studio entegrasyonlu TwinCAT programlama ortamı TwinCAT 3 extended Automation Beckhoff, otomasyon dünyasını
Geçen hafta neler öğrendik?
 Geçen hafta neler öğrendik? Eğitimde bilgisayar uygulamaları Bilgisayar Destekli Eğitim (BDE) BDE in Türleri Avantajları ve Sınırlılıkları ve Araştırma Sonuçları BDÖ NELERDEN OLUŞUR??? Öğretim Yazılımları
Geçen hafta neler öğrendik? Eğitimde bilgisayar uygulamaları Bilgisayar Destekli Eğitim (BDE) BDE in Türleri Avantajları ve Sınırlılıkları ve Araştırma Sonuçları BDÖ NELERDEN OLUŞUR??? Öğretim Yazılımları
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK. İlhan AYDIN
 BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
BMÜ-421 Benzetim ve Modelleme MATLAB SIMULINK İlhan AYDIN SIMULINK ORTAMI Simulink bize karmaşık sistemleri tasarlama ve simülasyon yapma olanağı vermektedir. Mühendislik sistemlerinde simülasyonun önemi
SolidWorks Macro, SolidWorks API. Yusuf MANSUROĞLU Mühendislik Hizmetleri Müdür Yardımcısı
 SolidWorks Macro, SolidWorks API Yusuf MANSUROĞLU Mühendislik Hizmetleri Müdür Yardımcısı 06.08.2014 SolidWorks Macro, SolidWorks API SolidWorks Makro Makro Kaydetme Kayıtlı Makro Çalıştırma Kayıtlı Makro
SolidWorks Macro, SolidWorks API Yusuf MANSUROĞLU Mühendislik Hizmetleri Müdür Yardımcısı 06.08.2014 SolidWorks Macro, SolidWorks API SolidWorks Makro Makro Kaydetme Kayıtlı Makro Çalıştırma Kayıtlı Makro