KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ MÜHENDĠSLĠK FAKÜLTESĠ BĠLGĠSAYAR MÜHENDĠSLĠĞĠ BÖLÜMÜ
|
|
|
- Yeter Akbaba
- 8 yıl önce
- İzleme sayısı:
Transkript

1 KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ MÜHENDĠSLĠK FAKÜLTESĠ BĠLGĠSAYAR MÜHENDĠSLĠĞĠ BÖLÜMÜ IŞIK İZLEYEN ROBOT TASARIM PROJESĠ SALĠHA PĠRBUDAK TUĞBA ÖZTÜRK GÜZ DÖNEMĠ

2 KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ MÜHENDĠSLĠK FAKÜLTESĠ BĠLGĠSAYAR MÜHENDĠSLĠĞĠ BÖLÜMÜ IŞIK İZLEYEN ROBOT TASARIM PROJESĠ SALĠHA PĠRBUDAK TUĞBA ÖZTÜRK Bu projenin teslim edilmesi ve sunulması tarafımca uygundur. Danışman : Yrd.Doç.Dr. Hüseyin Pehlivan GÜZ DÖNEMĠ

3 IEEE Etik Kuralları IEEE Code of Ethics Mesleğime karģı Ģahsi sorumluluğumu kabul ederek, hizmet ettiğim toplumlara ve üyelerine en yüksek etik ve mesleki davranıģta bulunmaya söz verdiğimi ve aģağıdaki etik kurallarını kabul ettiğimi ifade ederim: Kamu güvenliği, sağlığı ve refahı ile uyumlu kararlar vermenin sorumluluğunu kabul etmek ve kamu veya çevreyi tehdit edebilecek faktörleri derhal açıklamak; Mümkün olabilecek çıkar çatıģması, ister gerçekten var olması isterse sadece algı olması, durumlarından kaçınmak. Çıkar çatıģması olması durumunda, etkilenen taraflara durumu bildirmek; Mevcut verilere dayalı tahminlerde ve fikir beyan etmelerde gerçekçi ve dürüst olmak; Her türlü rüşveti reddetmek; Mütenasip uygulamalarını ve muhtemel sonuçlarını gözeterek teknoloji anlayıģını geliģtirmek; Teknik yeterliliklerimizi sürdürmek ve geliştirmek, yeterli eğitim veya tecrübe olması veya işin zorluk sınırları ifade edilmesi durumunda ancak başkaları için teknolojik sorumlulukları üstlenmek; Teknik bir çalıģma hakkında yansız bir eleģtiri için uğraģmak, eleģtiriyi kabul etmek ve eleģtiriyi yapmak; hatları kabul etmek ve düzeltmek; diğer katkı sunanların emeklerini ifade etmek; Bütün kişilere adilane davranmak; ırk, din, cinsiyet, yaş, milliyet, cinsi tercih, cinsiyet kimliği, veya cinsiyet ifadesi üzerinden ayırımcılık yapma durumuna girişmemek; YanlıĢ veya kötü amaçlı eylemler sonucu kimsenin yaralanması, mülklerinin zarar görmesi, itibarlarının veya istihdamlarının zedelenmesi durumlarının oluģmasından kaçınmak; Meslektaşlara ve yardımcı personele mesleki gelişimlerinde yardımcı olmak ve onları desteklemek. IEEE Yönetim Kurulu tarafından Ağustos 1990 da onaylanmıģtır.

4 ÖNSÖZ Projeyi gerçekleştirme aşamasında yardımlarını bizden eksik etmeyen ve bizi yönlendiren proje danıģmanımız ve değerli hocamız Yrd.Doç. Dr. Hüseyin Pehlivan a, desteklerinden ötürü Mühendislik Fakültesi Dekanlığına ve KTÜ Rektörlüğüne ve eğitim süremizce bize maddi ve manevi her türlü desteği sağlayan ailelerimize teģekkürlerimizi sunarız. Saliha PĠRBUDAK Tuğba ÖZTÜRK TRABZON Aralık 2015 II

5 ÖZET Basit elektronik ve mekanik düzenekler kullanarak yönelen bir aracın nasıl tasarlanabileceğini göstermek. Robotun yapımında kullanılan malzemelerin tamamı piyasadan kolaylıkla bulunabiliyor. Tezin ilk kısmında bu projeyi gerçekleģtirmek için hangi devre elemanlarını kullandığımızı ve devre elemanlarını niçin kullandığımızı açıkladık. Tezin ikinci kısmında ise projenin nasıl gerçekleģtirildiğini ve nasıl sonuçlandığını açıkladık. III

6 Sayfa No IEEE ETĠK KURALLARI ÖNSÖZ II ÖZET III ĠÇĠNDEKĠLER IV 1. GENEL BĠLGĠLER HAREKET MEKANĠZMASI SENSÖR DEVRESĠ DĠRENÇ BASKI DEVRE TASARIMI GÜÇ KAYNAĞI TASARIMI LED TRĠMPOT 7 2. YAPILAN ÇALIŞMALAR 8 3. TASARIM PROJE PROJE YAPIM AŞAMASI PROJENĠN SON HALĠ 11 4.GÖZLEMLER 12 5.SONUÇ 12 6.KAYNAKLAR EKLER STANDARTLAR ve KISITLAR FORMU 14 IV


7 1. GENEL BĠLGĠLER 1.1.Hareket Mekanizması Işık izleyen robot yapımında işlem önceliği mekanik kısmıdır. Mekanik kısmı dişliler ve tekerlekler oluşturmaktadır.dairesel hareketidaha güçlü, daha hızlı hale getirmek ve hareket iletimini sağlamak için dişli çarklar kullanılır.böylece robotun hareket kabiliyeti arttırılmıģ olur. 1.2.Sensor Devresi Şekil-1.1 Işık izleyen robotta 2 adet ıģık algılama sensörü bulunmaktadır. Işık algılama sensörleri LDR kullanılarak hazırlanmıģtır. Işık algılama sensör devreleri üzerindeki ledler ile hangi sensörün ıģığı algıladığı gözlenebilir. Sensör devreleri üzerinde bulunan trimpotlar ile sensör hassasiyetini ayarlamak mümkündür.ldr ye ıģık gelmediği durumda direnci çok yüksek olur. Üzerinden akım geçmez. Üzerine ıģık düģünce direnci hızla azalır ve akım geçirmeye baģlar. IĢığın Ģiddeti LDR nin direncini belirler. IĢık ne kadar Ģiddetli ise direnç o kadar düģer Direnç Elektrik akımına karģı gösterilen zorluğa direnç denir. Direnç R harfi ile gösterilir.v=ir bağıntısıyla hesaplanır. Birimi Ω (ohm) dur. 4 Ģeritli direnç okurken; 1. Ģerit rakam 2. Ģerit rakam 3. Ģerit çarpan 4. ġerit ise toleransını ifade eder. 5 renkli dirençlerde ise ilk üçünde sayı kısmına 4. de çarpan kısmına 5.de ise tolerans kısmına bakılır. 5

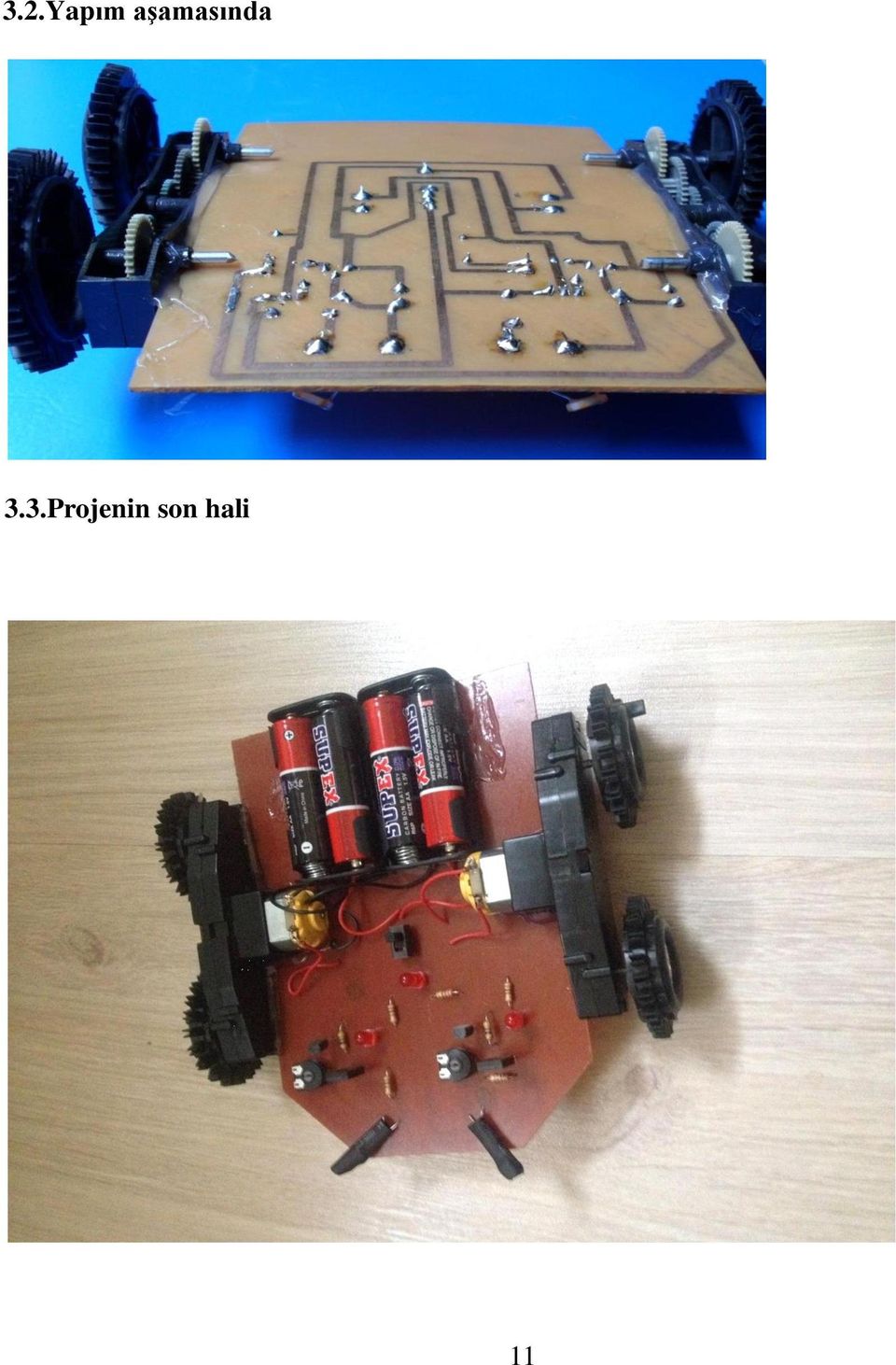
8 Renk Sayı Çarpan Tolerans Siyah Kahverengi 1 10 ± % 1 Kırmızı ± % 2 Turuncu Sarı Yeşil ± % 0,5 Mavi ± % 0,25 Mor ± % 0,1 Gri ± % 0,05 Beyaz Renksiz - - ± % 20 Gümüş - 0,01 ± % 10 Altın - 0,1 ± % Baskı Devre Tasarımı Robotun elektronik devresi resimdeki gibi hazırlandıktan sonra baskı plaketi ayarlanır. Baskı plaketi hazırlandıktan sonra kullanacağımız elektronik devre elemanları hazırlamıģ olduğumuz baskı devre plaketine yerleştirilir. Lehimleme yapılarak elektronik kısmı şekildeki gibi hazırlanmıģ olur. Baskı plaketi hazırdır Güç Kaynağı Tasarımı Devrenin enerji gereksinimini sağlamak üzere resimde görüldüğü gibi 2 adet alkaline kalem pil yuva üzerinde seri olarak birbirine bağlanır. HazırlamıĢ olduğumuz enerji kaynağıbir önceki adımda hazırlanmıģ olan elektronik devreye bağlanır. 6

9 1.6. LED ler LED, Ġngilizce Light Emitting Diode kelimelerinin kısaltmasından oluģur. Türkçesi ıģık yayan diyot manasına gelir. LED ler elektrik enerjisini ıģığa dönüģtüren dinamik dirençli yarı iletken devre elemanlarıdır. Daha çok fizik konusuna girdiği için fazla irdelemeyeceğimiz bu olayda bilinmesi gereken, LED içinde bulunan silikon üzerinden akım geçtiğinde, foton açığa çıkararak ıģık verdikleridir. Dirençleri dinamik olduğundan gösterdikleri direnç, yani yaydıkları ıģık miktarları, üzerlerinden geçen akımla değiģmektedir. Bu nedenle direk olarak bir akım veya gerilim kaynağına bağlandıklarında kısa devre gibi davranırlar. Bu nedenle, LED leri seri bir direnç üzerinden devreye bağlamak gerekir. LED lerin ortama yaydığı ıģığın frekansı, spektrumun gözle görünür ıģık bölgesine düģtüğü gibi, gözle görülemeyen frekansta ıģık yayan kızılötesi veya morötesi LED ler de vardır. 1.7.Trimpot (Tek Tur-Yatık) Trimpotlar bir tür dirençtirler. Elektronik devrelerde ayarı uzun süre değişmeyecek ve tornavida ile ayarlanabilen potansiyometrelere trimpot veya trimer potansiyometre denilmektedir. Çalışma mantığı normal potansiyometrelerinkiyle bire bir aynıdır. Kullanım alanları açısından potansiyometre daha çok sürekli ayar yapılmak zorunda olan devrelerde kullanılırken, trimpotlar nadiren ayar yapılması gereken devreler için kullanılır. Devre kartı üretilirken bir defa uygun ayar yapılır ve trimpotun değeri o ayarda bırakılır. Örneğin, radyo alıcı ve vericilerinde anten katının çalışma frekansı belirlenirken sıklıkla tercih edilirler. Ancak hem potansiyometrenin hem de trimpotun görevi, devrede sabit bir direnç sağlamaktır. Bir trimpot üç adet bacağa sahiptir. Gerilim bölücü olarak kullanıldığında genellikle trimpotun bir bacağı besleme voltajına, diğer bir bacağı toprağa bağlanır ve hareketli bacağı da çıkış almak için kullanılır. Eğer trimpot değişken direnç olarak kullanılacak ise değişken uç toprak ucuna bağlanır.trimpotun herhangi bir bacağını boşta bırakmak tavsiye edilmez. Çünkü bu durumda trimpota bağlanan yük değiştikçe voltaj da çok fazla değişir. Sonuçta trimpot direnci tam ayarlanmış bile olsa ufak bir sapmada gerilim bölücü olarak görevini iyi aynıdır. Biz 10K lıkyatık trimpot kullandık. 7

10 2. YAPILAN ÇALIŞMALAR Robotun elektronik devresindeki gibi hazırlandıktan sonra baskı plaketi ayarlanır.baskı plaketi hazırlandıktan sonra kullanacağımız elektronik devre elemanları hazırlamıs olduğumuz baskı devre plaketine yerlestirilir. Lehimleme yapılarak elektronik kısmı sekildeki gibi hazırlanmıs olur. 8

11 9
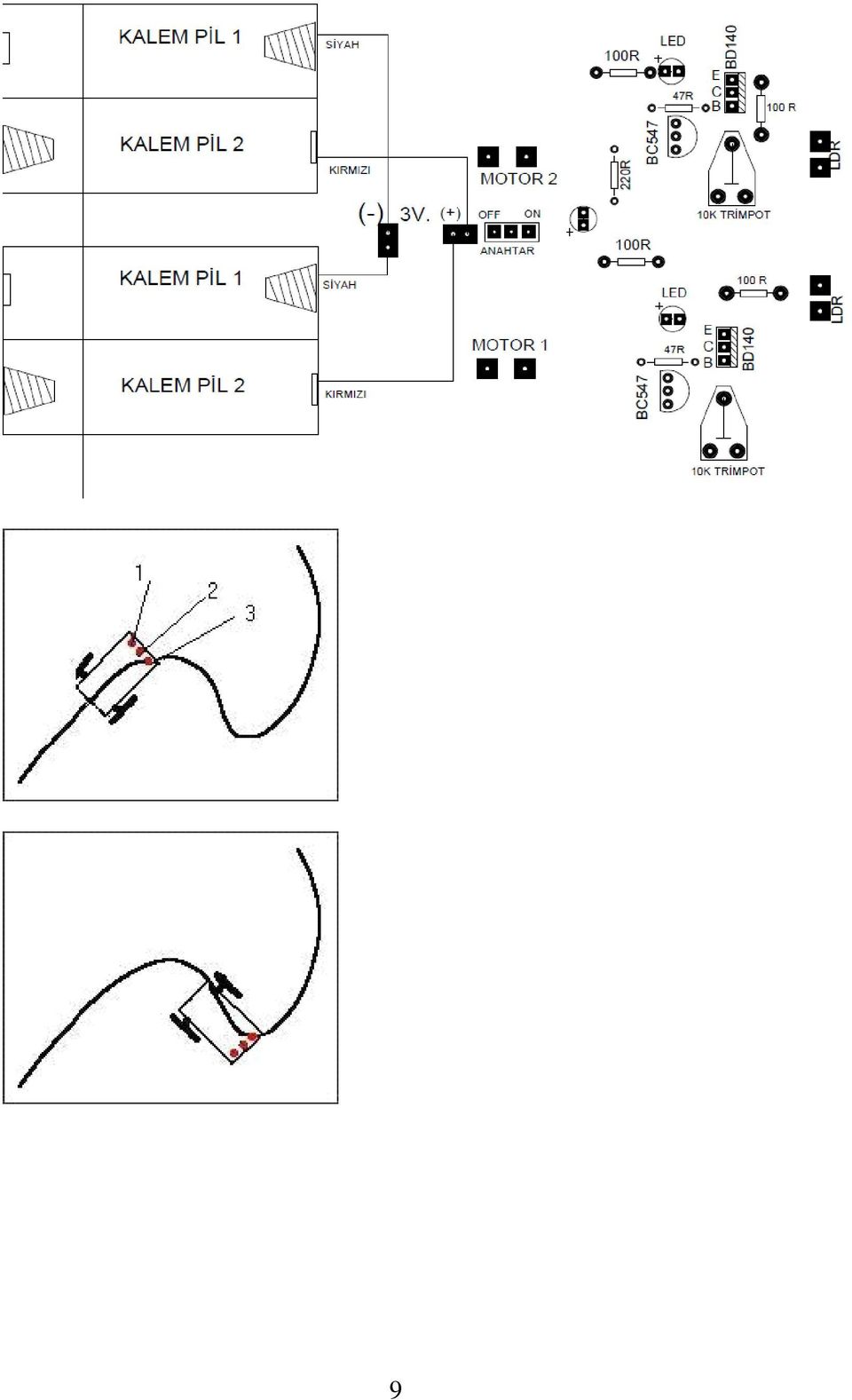
12 3.TASARIM 3.1.PROJE Işık izleyen robot üzerinde bulunan iki adet ışık algılama devresi ile ışığın geldiğiyöne doğru hareket eder.işık izleyen robotun güç ve algılama devreleri BD140, BC 547 ve LDR kullanılarak hazırlanmıştır.devre delikli pertinaks üzerine kurulmuştur.robotun ana devresinde motor sürücü kısmında bulunan led diyot ile hangi motor çıkışına sinyal gönderdiği takip edilebilir.robotun çalışması için 2 adet alkalin pil ve fenere ihtiyacımız oldu.ana devre, motor sürücü devreleri 2 adet BD 140 transistör kullanılarak yapılmıştır.robot üzerinde 2 adet ışık algılama sensörü bulunmaktadır.sensör devresi, ışık algılama sensörleri LDR (Light Dependent Resistor) kullanılarak hazırlanmıştır.sensör devreleri üzerinde bulunan trimpotlar ile sensör hassasiyetini ayarlayabildik.işık algılama sensör devresi üzerinde bulunan led diyotlar sayesinde hangi sensörün ışığı algıladığı gözlemlenebildi.mekanik özellikleri,robot gövdesi delikli pertinaks kullanılarak oluşturulmuştur.robotta 2 adet DC motor ve çekişi artırmak için 2 adet dişli kutusu ile dört adet teker kullanılmıştır.her iki motor için bu devreden 2 tane yapılmalıdır. Devre şemasında 1 adet bc547, 1 adet bd 140 pnp güç transistör, 3 adet direnç, 1 adet ldr ve 10 k lık trimpot bulunmaktadır. Ldr üzerine düşen ıģık miktarı arttıkça transistörlerinbaz akımları ve dolayısıyla iletim seviyeleri artar. Böylece motor uçlarına uygulanan gerilim yükselir ve motor hızlı dönmeye başlar. Işık miktarı azaldığında ise transistörlerin baz akımları azalır ve motor yavaşlar. Ldrleri aracın sağına ve soluna 45 derecelik açıyla yerleştirmek gerekir. Burada dikkat edilmesi gereken nokta soldaki ldr devresinin sağdaki motora bağlanması gerektiği ve aynı şekilde sağdaki ldr devresinin soldaki motora bağlanması gerektiğidir. Normal aydınlıkta trimpotlar motorlar çalıģmayacak şekilde tornavida yardımıyla ayarlanmalıdır.ldr üzerine el feneriyle ıģık tutulduğunda çarprazdaki motorun dönmesi gerekir.böylece sağdaki ldr üzerine düşen ıģık şiddeti fazlayken soldaki motor hızlanır ve robot ıģık kaynağına yönelmiş olur. 10

13 3.2.Yapım aşamasında 3.3.Projenin son hali 11
14 4.GÖZLEMLER Işık izleyen robotumuz ışığın geldiği yönü algılayıp, robotun ışık kaynağına doğru hareket etmesini sağlayacak şekilde oluşturulmuştur.işık izleyen Robotun çalıģma mantığı, araç üzerine yerleştirilen iki adet ıģığa duyarlı direnç (LDR) yardımıyla aracın gideceği yönü ayarlamaya dayanıyor. Aracın sağa veya sola dönüşü için birbirinden bağımsız iki adet doğru akım motoru gereklidir. Ġki motorun hızı arasındaki farka bağlı olarak aracın hareket yönü değişiyor. Hız ayarlama işlemi 4 transistörlü bir elektronik devre yardımıyla gerçekleştiriliyor.bu projede komplike gibi görünen aslında basit olan bir sistemi baģarıyla gerçekleģtirdik.transistör ve trimpotun devreye nasıl katıldığını öğrendik. 5.SONUÇ Bu projeyi hazırlarken hem ucuz hem pratik aynı zamanda farklı bir tasarım ortaya koymak amaçlı bir yöntem izledik. Bir oyuncak araba alarak dişlilerinden yararlanıp ve motorunu kullanarak hazırlamıģ olduğumuz elektronik sistemi araba gövdesine monte edip güç kaynağını da devreye bağlandıktan sonra ıģık izleyen robotumuzu ortaya çıkarmıģ olduk. 12

15 6.KAYNAKLAR

16 7.EKLER 7.1. Standartlar ve Kısıtlar Formu 1.Projenizin tasarım boyurtu nedir? Açıklayınız. Projemiz yatık trimpot,anahtar,led lamba,diģli tekerlek,transistörlerden,ldr,dirençlerden,pil yuvası olmak üzere toplam 23 parçadan oluģtu. 2.Projenizde mühendislik problemini kendiniz formüle edip, çözdünüz mü? Başlangıçta motorların milleri plakete sürtünüyordu.bu yüzden motorları plakete yapıştırırken dikkatli olduk.çünkü motorlar sıkıştı ve dönmekte zorluk çekti bu yüzden devre düzgün çalışmadı.ayrıca lehimleme yaparken bakır yolları kısa devre yapmıştık onları düzelttik. 3.Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız? Elektronik devreler ve sayısal tasarım gibi donanımsal derslerde öğrenmiģ olduğumuz bilgilerden faydanlandık. 4.Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir? Mikrodenetleyicilerin hangi bacağının ne iģe yaradığını dikkate alarak, assembly kodlarının yazımını gerçekleģtirdik. 5.Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir? Ekonomi Proje en uygun maliyetle yapılıp gerçekleģtirilmiģtir. Çevre sorunları: Çevre adına problemler devre yapılırken boģa harcanan kablo ve entegrelerdir. Sürdürülebilirlik: Uzun yıllar sürdürülebilirliği mevcuttur. Üretilebilirlik: Proje portatif olduğu için daha büyük mekanizmalarla üretilebilirliği mevcuttur. 14

17 Etik:Proje mühendislik açısından etiğe uygundur. f) Sağlık: Gerçekleştirilen proje insan sağlığını etkileyebilecek bir yanı yoktur. g) Güvenlik: Proje gerçekleştirilirken oluşabilecek tüm olumsuz koşullar düşünülerek güvenlik önlemleri alınmıştır. h) Sosyal ve politik sorunlar: Sosyal ve politik bir sorun teşkil etmemektedir. Projenin Adı Projedeki Öğrencilerin adları Işık İzleyen Robot Saliha PĠRBUDAK Tuğba ÖZTÜRK 15
 Sosyal ve politik sorunlar: Sosyal ve politik bir sorun teşkil etmemektedir.")
18

IŞIK ĐZLEYEN ROBOT PROJESĐ FOLLOWĐNG ROBOT SĐNOP LIGHT PROJECT. Proje Yürütücüleri Bünyamin TANGAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü
 IŞIK ĐZLEYEN ROBOT PROJESĐ FOLLOWĐNG ROBOT SĐNOP LIGHT PROJECT Proje Yürütücüleri Bünyamin TANGAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü 1 ÖZET Bu projenin amacı, basit elektronik ve mekanik
IŞIK ĐZLEYEN ROBOT PROJESĐ FOLLOWĐNG ROBOT SĐNOP LIGHT PROJECT Proje Yürütücüleri Bünyamin TANGAL, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü 1 ÖZET Bu projenin amacı, basit elektronik ve mekanik
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işık İzleyen Araba Projesi Proje No 2 Proje Raporu Adı, Soyadı, Öğrenci
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işık İzleyen Araba Projesi Proje No 2 Proje Raporu Adı, Soyadı, Öğrenci
9- ANALOG DEVRE ELEMANLARI
 9- ANALOG DEVRE ELEMANLARI *ANALOG VE DİJİTAL KAVRAMLARI *Herhangi bir fiziksel olayı ifade eden büyüklüklere işaret denmektedir. *Zaman içerisinde kesintisiz olarak devam eden işaretlere Analog işaret
9- ANALOG DEVRE ELEMANLARI *ANALOG VE DİJİTAL KAVRAMLARI *Herhangi bir fiziksel olayı ifade eden büyüklüklere işaret denmektedir. *Zaman içerisinde kesintisiz olarak devam eden işaretlere Analog işaret
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa 2 Nolu Proje
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa 2 Nolu Proje Proje Raporu Hakan Altuntaş 11066137 16.01.2013 İstanbul
DENEY FÖYÜ 1: Direnç Ölçme ve Devre Kurulması
 DENEY FÖYÜ 1: Direnç Ölçme ve Devre Kurulması Deneyin Amacı: Elektrik Elektroniğin temel bileşeni olan direnç ile ilgili temel bilgileri edinme, dirençlerin renk kodlarını öğrenme, devre kurma aracı olarak
DENEY FÖYÜ 1: Direnç Ölçme ve Devre Kurulması Deneyin Amacı: Elektrik Elektroniğin temel bileşeni olan direnç ile ilgili temel bilgileri edinme, dirençlerin renk kodlarını öğrenme, devre kurma aracı olarak
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. IŞIĞA DÖNEN KAFA Proje No:2
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA Proje No:2 Proje Raporu ÖMER FARUK ŞAHAN 12068030 16.01.2013 İstanbul İÇİNDEKİLER
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA Proje No:2 Proje Raporu ÖMER FARUK ŞAHAN 12068030 16.01.2013 İstanbul İÇİNDEKİLER
Makine Mühendisliği İçin Elektrik-Elektronik Bilgisi. Ders Notu-2 Hazırlayan: Yrd. Doç. Dr. Ahmet DUMLU
 Makine Mühendisliği İçin Elektrik-Elektronik Bilgisi Ders Notu-2 Hazırlayan: Yrd. Doç. Dr. Ahmet DUMLU DİRENÇLER Direnci elektrik akımına gösterilen zorluk olarak tanımlayabiliriz. Bir iletkenin elektrik
Makine Mühendisliği İçin Elektrik-Elektronik Bilgisi Ders Notu-2 Hazırlayan: Yrd. Doç. Dr. Ahmet DUMLU DİRENÇLER Direnci elektrik akımına gösterilen zorluk olarak tanımlayabiliriz. Bir iletkenin elektrik
Hazırlayan: Tugay ARSLAN
 Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
Hazırlayan: Tugay ARSLAN ELEKTRİKSEL TERİMLER Nikola Tesla Thomas Edison KONULAR VOLTAJ AKIM DİRENÇ GÜÇ KISA DEVRE AÇIK DEVRE AC DC VOLTAJ Gerilim ya da voltaj (elektrik potansiyeli farkı) elektronları
 GÜNEŞİ TAKİP EDEN HAREKETLİ KOLLEKTÖR MÜNİR ATAMAN BTSO Kamil Tolon Bilim Ve Sanat Merkezi Osmangazi-BURSA munirataman@hotmail.com ŞENOL YILDIZ Ekinciler 75. Yıl İlköğretim Okulu-Göynük BOLU senolyildiz5@hotmail.com
GÜNEŞİ TAKİP EDEN HAREKETLİ KOLLEKTÖR MÜNİR ATAMAN BTSO Kamil Tolon Bilim Ve Sanat Merkezi Osmangazi-BURSA munirataman@hotmail.com ŞENOL YILDIZ Ekinciler 75. Yıl İlköğretim Okulu-Göynük BOLU senolyildiz5@hotmail.com
ELEKTRİK ELEKTRONİK DEVRE ELEMANLARI
 ELEKTRİK ELEKTRONİK DEVRE ELEMANLARI BCP103 Öğr.Gör. MEHMET GÖL 1 Ders İçeriği Analog ve sayısal sinyal kavramları ler, çeşitleri, uygulama yerleri, direnç renk kodları Kondansatörler, çalışması, çeşitleri,
ELEKTRİK ELEKTRONİK DEVRE ELEMANLARI BCP103 Öğr.Gör. MEHMET GÖL 1 Ders İçeriği Analog ve sayısal sinyal kavramları ler, çeşitleri, uygulama yerleri, direnç renk kodları Kondansatörler, çalışması, çeşitleri,
ELEKTRONİK DEVRE ELEMANLARI
 ELEKTRONİK DEVRE ELEMANLARI 1. Direnç Renk Kodları Direnç Renk Tablosu Renk Sayı Çarpan Tolerans SİYAH 0 1 KAHVERENGİ 1 10 ± %1 KIRMIZI 2 100 ± %2 TURUNCU 3 1000 SARI 4 10.000 YEŞİL 5 100.000 ± %0.5 MAVİ
ELEKTRONİK DEVRE ELEMANLARI 1. Direnç Renk Kodları Direnç Renk Tablosu Renk Sayı Çarpan Tolerans SİYAH 0 1 KAHVERENGİ 1 10 ± %1 KIRMIZI 2 100 ± %2 TURUNCU 3 1000 SARI 4 10.000 YEŞİL 5 100.000 ± %0.5 MAVİ
IŞIK ĐZLEYEN ROBOT PROJESĐ LIGHT FOLLOWĐNG ROBOT PROJECT. Hasan ALTAŞ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP
 IŞIK ĐZLEYEN ROBOT PROJESĐ LIGHT FOLLOWĐNG ROBOT PROJECT Proje Yürütücüleri Hasan ALTAŞ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP Tayfun KOÇ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü,
IŞIK ĐZLEYEN ROBOT PROJESĐ LIGHT FOLLOWĐNG ROBOT PROJECT Proje Yürütücüleri Hasan ALTAŞ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü, SĐNOP Tayfun KOÇ, Sinop Ünv. Meslek Yüksekokulu Mekatronik Bölümü,
DENEY FÖYÜ 1: Direnç Ölçme ve Devre Kurulma
 DENEY FÖYÜ 1: Direnç Ölçme ve Devre Kurulma Deneyin Amacı: Elektrik Elektroniğin temel bileşeni olan direnç ile ilgili temel bigileri edinme, dirençlerin renk kodlarını öğrenme ve dirençlerin breadboard
DENEY FÖYÜ 1: Direnç Ölçme ve Devre Kurulma Deneyin Amacı: Elektrik Elektroniğin temel bileşeni olan direnç ile ilgili temel bigileri edinme, dirençlerin renk kodlarını öğrenme ve dirençlerin breadboard
DENEY 5 ÖN HAZIRLIK RAPORU
 Adı Soyadı: Öğrenci No: DENEY 5 ÖN HAZIRLIK RAPORU 1) a. Şekildeki devreyi aşağıdaki breadboard üzerine kurulumunu çizerek gösteriniz.(kaynağın kırmızı ucu + kutbu, siyah ucu - kutbu temsil eder.) b. R
Adı Soyadı: Öğrenci No: DENEY 5 ÖN HAZIRLIK RAPORU 1) a. Şekildeki devreyi aşağıdaki breadboard üzerine kurulumunu çizerek gösteriniz.(kaynağın kırmızı ucu + kutbu, siyah ucu - kutbu temsil eder.) b. R
DENEY-2 DEVRE KURMA. Şekil 1. DC Güç Kaynağı
 DENEY-2 DEVRE KURMA Deneyin Amacı: Deneyde kullanılan aletlerin öğrenilmesi ve devre kurma. Kullanılan Alet ve Malzeme: a) DC güç kaynağı b) Mutimetre c) Değişik değerlerde direnç ve bağlantı kabloları
DENEY-2 DEVRE KURMA Deneyin Amacı: Deneyde kullanılan aletlerin öğrenilmesi ve devre kurma. Kullanılan Alet ve Malzeme: a) DC güç kaynağı b) Mutimetre c) Değişik değerlerde direnç ve bağlantı kabloları
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2)
") YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ IŞIĞA DÖNEN KAFA PROJESİ(PROJE 2) Samet Doğan 11067012 16.01.2013 İstanbul İÇİNDEKİLER 1.
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ
 KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ PROPELLER DISPLAY (HAVAYA YAZI YAZMA) TASARIM PROJESİ Arif VARDAR 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK
KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ PROPELLER DISPLAY (HAVAYA YAZI YAZMA) TASARIM PROJESİ Arif VARDAR 2015-2016 GÜZ DÖNEMİ KARADENİZ TEKNİK ÜNİVERSİTESİ MÜHENDİSLİK
Akımı sınırlamaya yarayan devre elemanlarına direnç denir.
 Akımı sınırlamaya yarayan devre elemanlarına direnç denir. Gösterimi: Birimi: Ohm Birim Gösterimi: Ω (Omega) Katları: 1 Gigaohm = 1GΩ = 10 9 Ω 1 Megaohm = 1MΩ = 10 6 Ω 1 Kiloohm = 1kΩ = 10 3 Ω 1 ohm =
Akımı sınırlamaya yarayan devre elemanlarına direnç denir. Gösterimi: Birimi: Ohm Birim Gösterimi: Ω (Omega) Katları: 1 Gigaohm = 1GΩ = 10 9 Ω 1 Megaohm = 1MΩ = 10 6 Ω 1 Kiloohm = 1kΩ = 10 3 Ω 1 ohm =
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı: Işığı Takip Eden Kafa
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı: Işığı Takip Eden Kafa Proje No: 2 Proje Raporu Mehmet Emin Sonverdi 11068030
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı: Işığı Takip Eden Kafa Proje No: 2 Proje Raporu Mehmet Emin Sonverdi 11068030
Dirençler. 08 Aralık 2015 Salı 1
 Dirençler 08 Aralık 2015 Salı 1 Tanımı ve İşlevi Dirençler elektrik akımına zorluk gösteren elektronik devre elemanlarıdır. Direnç R harfi ile gösterilir, birimi ohmdur. Omega simgesi ile gösterilir (Ω).
Dirençler 08 Aralık 2015 Salı 1 Tanımı ve İşlevi Dirençler elektrik akımına zorluk gösteren elektronik devre elemanlarıdır. Direnç R harfi ile gösterilir, birimi ohmdur. Omega simgesi ile gösterilir (Ω).
ELK101 - ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ
 Giresun Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü Bölümün tanıtılması Elektrik Elektronik Mühendisliğinin tanıtılması Mühendislik Etiği Birim Sistemleri Doğru ve Alternatif
Giresun Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü Bölümün tanıtılması Elektrik Elektronik Mühendisliğinin tanıtılması Mühendislik Etiği Birim Sistemleri Doğru ve Alternatif
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığa Dönen Kafa Projesi 2
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığa Dönen Kafa Projesi 2 Proje Raporu Nurulllah Anıl Afacan-11068011 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığa Dönen Kafa Projesi 2 Proje Raporu Nurulllah Anıl Afacan-11068011 16.01.2013 İstanbul
İstanbul Teknik Üniversitesi IEEE Öğrenci Kolu
 Direnç Dirençler elektronik devrelerin vazgeçilmez elemanlarıdır. Yaptıkları iş ise devre içinde kullanılan diğer aktif elemanlara uygun gerilimi temin etmektir. Elektronik devreler sabit bir gerilim ile
Direnç Dirençler elektronik devrelerin vazgeçilmez elemanlarıdır. Yaptıkları iş ise devre içinde kullanılan diğer aktif elemanlara uygun gerilimi temin etmektir. Elektronik devreler sabit bir gerilim ile
DİRENÇ ÇEŞİTLERİ. Sabit dirençler Ayarlı dirençler Entegre tipi dirençler Özel (ortam etkili) dirençler
 dirençler") DİRENÇ ÇEŞİTLERİ Sabit dirençler Ayarlı dirençler Entegre tipi dirençler Özel (ortam etkili) dirençler Sabit dirençler Direnç değerleri sabit olan, yani değiştirilemeyen elemanlardır. Ayarlı dirençler
DİRENÇ ÇEŞİTLERİ Sabit dirençler Ayarlı dirençler Entegre tipi dirençler Özel (ortam etkili) dirençler Sabit dirençler Direnç değerleri sabit olan, yani değiştirilemeyen elemanlardır. Ayarlı dirençler
SAKARYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK DEVRELER LABORATUARI
 SAKARYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK DEVRELER LABORATUARI DENEYİ YAPTIRAN: DENEYİN ADI: DENEY NO: DENEYİ YAPANIN ADI ve SOYADI: SINIFI: OKUL NO: DENEY GRUP NO:
SAKARYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRONİK DEVRELER LABORATUARI DENEYİ YAPTIRAN: DENEYİN ADI: DENEY NO: DENEYİ YAPANIN ADI ve SOYADI: SINIFI: OKUL NO: DENEY GRUP NO:
Breadboard: Elektrik devrelerinin üzerine kurulmasını sağlayan en temel deney ekipmanıdır.
 DENEY 1: EŞDEĞER DİRENÇ ÖLÇÜMÜ Deneyin Amaçları Devrelerin eşdeğer direncinin deneysel olarak belirlenmesi Malzemeler ve Kullanılacak Cihazlar Breadboard, çeşitli değerlerde dirençler, multimetre Teorik
DENEY 1: EŞDEĞER DİRENÇ ÖLÇÜMÜ Deneyin Amaçları Devrelerin eşdeğer direncinin deneysel olarak belirlenmesi Malzemeler ve Kullanılacak Cihazlar Breadboard, çeşitli değerlerde dirençler, multimetre Teorik
GERİLİM REGÜLATÖRLERİ DENEYİ
 GERİLİM REGÜLATÖRLERİ DENEYİ Regüleli Güç Kaynakları Elektronik cihazlar harcadıkları güçlere göre farklı akımlara ihtiyaç duyarlar. Örneğin; bir radyo veya amplifikatörün hoparlöründen duyulan ses şiddetine
GERİLİM REGÜLATÖRLERİ DENEYİ Regüleli Güç Kaynakları Elektronik cihazlar harcadıkları güçlere göre farklı akımlara ihtiyaç duyarlar. Örneğin; bir radyo veya amplifikatörün hoparlöründen duyulan ses şiddetine
DĐRENÇ DEVRELERĐNDE KIRCHOFF UN GERĐLĐMLER ve AKIMLAR YASASI
 DENEY NO: DĐRENÇ DEVRELERĐNDE KIRCHOFF UN GERĐLĐMLER ve AKIMLAR YASASI Bu deneyde direnç elamanını tanıtılması,board üzerinde devre kurmayı öğrenilmesi, avometre yardımıyla direnç, dc gerilim ve dc akım
DENEY NO: DĐRENÇ DEVRELERĐNDE KIRCHOFF UN GERĐLĐMLER ve AKIMLAR YASASI Bu deneyde direnç elamanını tanıtılması,board üzerinde devre kurmayı öğrenilmesi, avometre yardımıyla direnç, dc gerilim ve dc akım
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL Optik Sensörler Üzerine düşen ışığa bağlı olarak üstünden geçen akımı değiştiren elemanlara optik eleman denir. Optik transdüserler ışık miktarındaki değişmeleri elektriksel
Sensörler Yrd.Doç.Dr. İlker ÜNAL Optik Sensörler Üzerine düşen ışığa bağlı olarak üstünden geçen akımı değiştiren elemanlara optik eleman denir. Optik transdüserler ışık miktarındaki değişmeleri elektriksel
DENEY 1: SERİ VE PARALEL BAĞLI DİRENÇ ELEMANLARI
 DENEY 1: SERİ VE PARALEL BAĞLI DİRENÇ ELEMANLARI A. DENEYİN AMACI : Bu deneyde,, direnç, elektrik devre elemanları sağlamlık kontrolleri ve breadboard üzerinde kurulacak devrelerde seri paralel durumlarda
DENEY 1: SERİ VE PARALEL BAĞLI DİRENÇ ELEMANLARI A. DENEYİN AMACI : Bu deneyde,, direnç, elektrik devre elemanları sağlamlık kontrolleri ve breadboard üzerinde kurulacak devrelerde seri paralel durumlarda
HD710 ISI KONTROLLÜ RÖLE MONTAJ KILAVUZU MALZEME LİSTESİ
 HD710 ISI KONTROLLÜ RÖLE MONTAJ KILAVUZU MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ MONTAJ İŞLEM BASAMAKLARI 1. Poşetten çıkan malzemelerinizi, malzeme listesine göre kontrol ediniz. Elinizdeki her
HD710 ISI KONTROLLÜ RÖLE MONTAJ KILAVUZU MALZEME LİSTESİ AÇIK DEVRE ŞEMASI BASKI DEVRESİ MONTAJ İŞLEM BASAMAKLARI 1. Poşetten çıkan malzemelerinizi, malzeme listesine göre kontrol ediniz. Elinizdeki her
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ Elektrik ve Elektronik Ölçmeler Laboratuvarı Deney Adı: Sensörler. Deney 5: Sensörler. Deneyin Amacı: A.
 Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
YILDIZ TEKNĠK ÜNĠVERSĠTESĠ MAKĠNE FAKÜLTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ. MEKATRONĠK MÜHENDĠSLĠĞĠNE GĠRĠġ DERSĠ
 YILDIZ TEKNĠK ÜNĠVERSĠTESĠ MAKĠNE FAKÜLTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MEKATRONĠK MÜHENDĠSLĠĞĠNE GĠRĠġ DERSĠ Proje Adı: DC Motor Hız Kontrolü - Proje No: 1 Proje Raporu Fatih, Elmas, 12067018 16.01.2013
YILDIZ TEKNĠK ÜNĠVERSĠTESĠ MAKĠNE FAKÜLTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MEKATRONĠK MÜHENDĠSLĠĞĠNE GĠRĠġ DERSĠ Proje Adı: DC Motor Hız Kontrolü - Proje No: 1 Proje Raporu Fatih, Elmas, 12067018 16.01.2013
Analog Elektronik. Öğr.Gör. Emre ÖZER
 Analog Elektronik Öğr.Gör. Emre ÖZER Analog Devre Elemanları Dirençler Dirençler elektrik akımına zorluk gösteren elektronik devre elemanlarıdır. Alman bilim adamı Ohm tarafından 1827 yılında bulunmuştur.
Analog Elektronik Öğr.Gör. Emre ÖZER Analog Devre Elemanları Dirençler Dirençler elektrik akımına zorluk gösteren elektronik devre elemanlarıdır. Alman bilim adamı Ohm tarafından 1827 yılında bulunmuştur.
(VEYA-DEĞİL kapısı) (Exlusive OR kapısı) (Exlusive NOR kapısı)
 (Exlusive OR kapısı) (Exlusive NOR kapısı)") 1.1 Ön Çalışma Deney çalışmasında yapılacak uygulamaların benzetimlerini yaparak, sonuçlarını ön çalışma raporu olarak hazırlayınız. 1.2 Deneyin Amacı Temel kapı işlemlerinin ve gerçekleştirilmesi. bu
1.1 Ön Çalışma Deney çalışmasında yapılacak uygulamaların benzetimlerini yaparak, sonuçlarını ön çalışma raporu olarak hazırlayınız. 1.2 Deneyin Amacı Temel kapı işlemlerinin ve gerçekleştirilmesi. bu
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işığı Takip Eden Kafa - 2
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa - 2 Proje Raporu İbrahim Cem Balcı 12067003 16.01.2013 İstanbul İÇİNDEKİLER
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işığı Takip Eden Kafa - 2 Proje Raporu İbrahim Cem Balcı 12067003 16.01.2013 İstanbul İÇİNDEKİLER
Deney 3: Diyotlar ve Diyot Uygulamaları. Amaç: Araç ve Malzeme: Teori:
 Deney 3: Diyotlar ve Diyot Uygulamaları Amaç: Diyot elemanını ve çeşitlerini tanımak Diyotun çalışma mantığını kavramak Diyot sağlamlık kontrolü İleri kutuplama, geri kutuplama ve gerilim düşümü. Araç
Deney 3: Diyotlar ve Diyot Uygulamaları Amaç: Diyot elemanını ve çeşitlerini tanımak Diyotun çalışma mantığını kavramak Diyot sağlamlık kontrolü İleri kutuplama, geri kutuplama ve gerilim düşümü. Araç
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No IŞIĞI TAKİP EDEN KAFA-PROJE 2 Proje Raporu Adı, Soyadı, Öğrenci Numarası
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No IŞIĞI TAKİP EDEN KAFA-PROJE 2 Proje Raporu Adı, Soyadı, Öğrenci Numarası
Proje adı : Işığa Dönen Kafa. Proje no : 2. Proje Raporu. Efkan Yılmaz/ İstanbul
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje adı : Işığa Dönen Kafa Proje no : 2 Proje Raporu Efkan Yılmaz/12068017 16.01.2013
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje adı : Işığa Dönen Kafa Proje no : 2 Proje Raporu Efkan Yılmaz/12068017 16.01.2013
Aşağıdaki formülden bulunabilir. S16-Kesiti S1=0,20 mm²,uzunluğu L1=50 m,özdirenci φ=1,1 olan krom-nikel telin direnci kaç ohm dur? R1=?
 S1-5 kw lık bir elektrik cihazı 360 dakika süresince çalıştırılacaktır. Bu elektrik cihazının yaptığı işi hesaplayınız. ( 1 saat 60 dakikadır. ) A-30Kwh B-50 Kwh C-72Kwh D-80Kwh S2-400 miliwatt kaç Kilowatt
S1-5 kw lık bir elektrik cihazı 360 dakika süresince çalıştırılacaktır. Bu elektrik cihazının yaptığı işi hesaplayınız. ( 1 saat 60 dakikadır. ) A-30Kwh B-50 Kwh C-72Kwh D-80Kwh S2-400 miliwatt kaç Kilowatt
OHM KANUNU DĠRENÇLERĠN BAĞLANMASI
 OHM KANUNU DĠRENÇLERĠN BAĞLANMASI 2.1 Objectives: Ohm Kanunu: Farklı direnç değerleri için, dirence uygulanan gerilime göre direnç üzerinden akan akımın ölçülmesi. Dirençlerin Seri Bağlanması: Seri bağlı
OHM KANUNU DĠRENÇLERĠN BAĞLANMASI 2.1 Objectives: Ohm Kanunu: Farklı direnç değerleri için, dirence uygulanan gerilime göre direnç üzerinden akan akımın ölçülmesi. Dirençlerin Seri Bağlanması: Seri bağlı
Fiz102L TOBB ETÜ. Deney 2. OHM Kanunu, dirençlerin paralel ve seri bağlanması. P r o f. D r. S a l e h S U L T A N S O Y
 Fiz102L Deney 2 OHM Kanunu, dirençlerin paralel ve seri bağlanması P r o f. D r. T u r g u t B A Ş T U Ğ P r o f. D r. S a l e h S U L T A N S O Y Y r d. D o ç. D r. N u r d a n D. S A N K I R D r. A h
Fiz102L Deney 2 OHM Kanunu, dirençlerin paralel ve seri bağlanması P r o f. D r. T u r g u t B A Ş T U Ğ P r o f. D r. S a l e h S U L T A N S O Y Y r d. D o ç. D r. N u r d a n D. S A N K I R D r. A h
Ankara Üniversitesi Fen Fakültesi Kimya Bölümü 2014-2015 Bahar Yarıyılı 7. Bölüm Özeti 28.04.2015 Ankara Aysuhan OZANSOY
 FİZ102 FİZİK-II Ankara Üniversitesi Fen Fakültesi Kimya Bölümü 2014-2015 Bahar Yarıyılı 7. Bölüm Özeti Ankara Aysuhan OZANSOY Bölüm 7: Doğru Akım Devreleri 1. Dirençler 2. Elektrik Ölçü Aletleri 3. Kirchoff
FİZ102 FİZİK-II Ankara Üniversitesi Fen Fakültesi Kimya Bölümü 2014-2015 Bahar Yarıyılı 7. Bölüm Özeti Ankara Aysuhan OZANSOY Bölüm 7: Doğru Akım Devreleri 1. Dirençler 2. Elektrik Ölçü Aletleri 3. Kirchoff
2. HAFTA BLM223 DEVRE ANALİZİ. Yrd. Doç Dr. Can Bülent FİDAN. hdemirel@karabuk.edu.tr
 2. HAFTA BLM223 Yrd. Doç Dr. Can Bülent FİDAN hdemirel@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 2. AKIM, GERİLİM E DİRENÇ 2.1. ATOM 2.2. AKIM 2.3. ELEKTRİK YÜKÜ
2. HAFTA BLM223 Yrd. Doç Dr. Can Bülent FİDAN hdemirel@karabuk.edu.tr Karabük Üniversitesi Uzaktan Eğitim Uygulama ve Araştırma Merkezi 2 2. AKIM, GERİLİM E DİRENÇ 2.1. ATOM 2.2. AKIM 2.3. ELEKTRİK YÜKÜ
DİRENÇLER, DİRENÇLERİN SERİ VE PARALEL BAĞLANMASI, OHM VE KIRCHOFF YASALARI
 DİRENÇLER, DİRENÇLERİN SERİ VE PARALEL BAĞLANMASI, OHM VE KIRCHOFF YASALARI AMAÇ: Dirençleri tanıyıp renklerine göre değerlerini bulma, deneysel olarak tetkik etme Voltaj, direnç ve akım değişimlerini
DİRENÇLER, DİRENÇLERİN SERİ VE PARALEL BAĞLANMASI, OHM VE KIRCHOFF YASALARI AMAÇ: Dirençleri tanıyıp renklerine göre değerlerini bulma, deneysel olarak tetkik etme Voltaj, direnç ve akım değişimlerini
DENEY 1 DİYOT KARAKTERİSTİKLERİ
 DENEY 1 DİYOT KARAKTERİSTİKLERİ 1.1. DENEYİN AMACI Bu deneyde diyotların akım-gerilim karakteristiği incelenecektir. Bir ölçü aleti ile (volt-ohm metre) diyodun ölçülmesi ve kontrol edilmesi (anot ve katot
DENEY 1 DİYOT KARAKTERİSTİKLERİ 1.1. DENEYİN AMACI Bu deneyde diyotların akım-gerilim karakteristiği incelenecektir. Bir ölçü aleti ile (volt-ohm metre) diyodun ölçülmesi ve kontrol edilmesi (anot ve katot
T.C. NECMETTĠN ERBAKAN ÜNĠVERSĠTESĠ Mühendislik ve Mimarlık Fakültesi. Elektrik-Elektronik Mühendisliği Bölümü BĠTĠRME ÖDEVĠNĠN ADI BİTİRME PROJESİ
 T.C. NECMETTĠN ERBAKAN ÜNĠVERSĠTESĠ Mühendislik ve Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü BĠTĠRME ÖDEVĠNĠN ADI BİTİRME PROJESİ 130100310.. Ad SOYAD 130100310.. Ad SOYAD 130100310..
T.C. NECMETTĠN ERBAKAN ÜNĠVERSĠTESĠ Mühendislik ve Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü BĠTĠRME ÖDEVĠNĠN ADI BİTİRME PROJESİ 130100310.. Ad SOYAD 130100310.. Ad SOYAD 130100310..
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri
 Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri") YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
LEDler (Light Emitting Diodes-Işık Yayan Diyotlar)
") LEDler (Light Emitting Diodes-Işık Yayan Diyotlar) Işık yayan flamansız lambalara LED denir. Bu elemanlar çeşitli boyutlarda üretilirler.2-20 miliamper gibi çok az akımla çalışırlar. Sarsıntılara dayanıklı
LEDler (Light Emitting Diodes-Işık Yayan Diyotlar) Işık yayan flamansız lambalara LED denir. Bu elemanlar çeşitli boyutlarda üretilirler.2-20 miliamper gibi çok az akımla çalışırlar. Sarsıntılara dayanıklı
DERS NOTLARI. Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi
 DERS NOTLARI Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi Ders-3 11.10.2016 555-Zaman Entegresi 555 Zaman Entegre Devresi monastable multivibratör (asimetrik kare dalga osilatör), astable
DERS NOTLARI Yard. Doç. Dr. Namık AKÇAY İstanbul Üniversitesi Fen Fakültesi Ders-3 11.10.2016 555-Zaman Entegresi 555 Zaman Entegre Devresi monastable multivibratör (asimetrik kare dalga osilatör), astable
İçerik. Ürün no.: ET5I.3/4P Enerjik ışık sensörleri
 Ürün no.: 50127902 ET5I.3/4P Enerjik ışık sensörleri Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Diyagramlar Kumanda ve gösterge Aksesuarlar Uyarılar
Ürün no.: 50127902 ET5I.3/4P Enerjik ışık sensörleri Şekil farklılık gösterebilir İçerik Teknik veriler Boyutlandırılmış çizimler Elektrik bağlantısı Diyagramlar Kumanda ve gösterge Aksesuarlar Uyarılar
DİRENÇLER DĠRENÇLER. 1. Çalışması:
 DİRENÇLER DĠRENÇLER 1. Çalışması: Dirençler üzerlerinden geçen akıma zorluk gösteren devre elemanlarıdır. Bu özelliklerinden dolayı gerilimi sınırlamak için kullanılırlar. Çalışırken direnç üzerinde, direncin
DİRENÇLER DĠRENÇLER 1. Çalışması: Dirençler üzerlerinden geçen akıma zorluk gösteren devre elemanlarıdır. Bu özelliklerinden dolayı gerilimi sınırlamak için kullanılırlar. Çalışırken direnç üzerinde, direncin
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Işın Avcısı Proje 2.
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işın Avcısı Proje 2 Proje Raporu Kaan Tellioğlu - 12067006 16.01.2013 İstanbul 1 İÇİNDEKİLER
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Işın Avcısı Proje 2 Proje Raporu Kaan Tellioğlu - 12067006 16.01.2013 İstanbul 1 İÇİNDEKİLER
ME 407 Mechanical Engineering Design
 ME 407 Mechanical Engineering Design Temel Elektroniğe Giriş Eğitimi B.Ş. Özden 09.11.2012 ME 407 Temel Elektroniğe Giriş Eğitimi 1 Elektrik 09.11.2012 ME 407 Temel Elektroniğe Giriş Eğitimi 2 Elektrik
ME 407 Mechanical Engineering Design Temel Elektroniğe Giriş Eğitimi B.Ş. Özden 09.11.2012 ME 407 Temel Elektroniğe Giriş Eğitimi 1 Elektrik 09.11.2012 ME 407 Temel Elektroniğe Giriş Eğitimi 2 Elektrik
TEMEL ELEKTRONİK VE ÖLÇME -1 DERSİ 1.SINAV ÇALIŞMA NOTU
 No Soru Cevap 1-.. kırmızı, sarı, mavi, nötr ve toprak hatlarının en az ikisinin birbirine temas ederek elektriksel akımın bu yolla devresini tamamlamasıdır. 2-, alternatif ve doğru akım devrelerinde kullanılan
No Soru Cevap 1-.. kırmızı, sarı, mavi, nötr ve toprak hatlarının en az ikisinin birbirine temas ederek elektriksel akımın bu yolla devresini tamamlamasıdır. 2-, alternatif ve doğru akım devrelerinde kullanılan
EEME210 ELEKTRONİK LABORATUARI
 Dicle Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü EEME210 ELEKTRONİK LABORATUARI DENEY 02: ZENER DİYOT ve AKIM GERİLİM KARAKTERİSTİĞİ 2014-2015 BAHAR Grup Kodu: Deney Tarihi:
Dicle Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü EEME210 ELEKTRONİK LABORATUARI DENEY 02: ZENER DİYOT ve AKIM GERİLİM KARAKTERİSTİĞİ 2014-2015 BAHAR Grup Kodu: Deney Tarihi:
TURN-OFF DEVRESİ BASKI DEVRE ÇIKARMA
 DEVRE ŞEMASI TURN-OFF DEVRESİ BASKI DEVRE ÇIKARMA Madde 1: Tüm elemanlar temin edilmelidir. Madde 2: Transistör, entegre gibi elemanların bacak isimleri katalogdan öğrenilmelidir. Madde 3: YERLEŞİM PLANI
DEVRE ŞEMASI TURN-OFF DEVRESİ BASKI DEVRE ÇIKARMA Madde 1: Tüm elemanlar temin edilmelidir. Madde 2: Transistör, entegre gibi elemanların bacak isimleri katalogdan öğrenilmelidir. Madde 3: YERLEŞİM PLANI
2- İşverenler işyerlerinde meydana gelen bir iş kazasını en geç kaç iş günü içerisinde ilgili bölge müdürlüğüne bildirmek zorundadır?
 1- Doğa ve çevreye fazla zarar vermeden devamlı ve kaliteli bir hizmet veya mal üretimi sırasında iş kazalarının meydana gelmemesi ve meslek hastalıklarının oluşmaması için alınan tedbirlerin ve yapılan
1- Doğa ve çevreye fazla zarar vermeden devamlı ve kaliteli bir hizmet veya mal üretimi sırasında iş kazalarının meydana gelmemesi ve meslek hastalıklarının oluşmaması için alınan tedbirlerin ve yapılan
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI TEMEL DEVRE TEOREMLERİNİN UYGULANMASI
 T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI TEMEL DEVRE TEOREMLERİNİN UYGULANMASI DENEY SORUMLUSU Arş. Gör. Şaban ULUS Şubat 2014 KAYSERİ
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ TEMEL ELEKTRİK DEVRE LABORATUVARI TEMEL DEVRE TEOREMLERİNİN UYGULANMASI DENEY SORUMLUSU Arş. Gör. Şaban ULUS Şubat 2014 KAYSERİ
ELEKTRİK AKIMI Elektrik Akım Şiddeti Bir İletkenin Direnci
 ELEKTRİK AKIMI Elektrikle yüklü ve potansiyelleri farklı olan iki iletken küreyi, iletken bir telle birleştirilirse, potansiyel farkından dolayı iletkende yük akışı meydana gelir. Bir iletkenden uzun süreli
ELEKTRİK AKIMI Elektrikle yüklü ve potansiyelleri farklı olan iki iletken küreyi, iletken bir telle birleştirilirse, potansiyel farkından dolayı iletkende yük akışı meydana gelir. Bir iletkenden uzun süreli
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE. Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI
 ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
ENGELDEN KAÇARAK SESE YÖNELEN PALETLĐ ROBOT PROJESĐ ROBOTVOICETRACKTOWARDSFLEEFROM OBSTACLE Ömer AYAN ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ, ÇANKIRI Burak YENER ÇANKIRI KARATEKĐN ÜNĐVERSĐTESĐ,ÇANKIRI Ramazan
Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi.
 ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak
ÇİZGİ İZLEYEN ARAÇ PROJESİ: Amaç: Yaptığımız aracın yere çizilen bir çizgiyi tanıması ve bu çizgiyi takip etmesi. Kullanılan Parça ve Malzemeler: Araçta şasi olarak genelde elektronik devreleri kutulamak
DC motorların sürülmesi ve sürücü devreleri
 DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
DC motorların sürülmesi ve sürücü devreleri Armatür (endüvi) gerilimini değiştirerek devri ayarlamak mümkündür. Endüvi akımını değiştirerek torku (döndürme momentini) ayarlamak mümkündür. Endüviye uygulanan
TEMEL ELEKTRONĠK DERS NOTU
 TEMEL ELEKTRONĠK DERS NOTU A. ELEKTRONĠKDE BĠLĠNMESĠ GEREKEN TEMEL KONULAR a. AKIM i. Akımın birimi amperdir. ii. Akım I harfiyle sembolize edilir. iii. Akımı ölçen ölçü aleti ampermetredir. iv. Ampermetre
TEMEL ELEKTRONĠK DERS NOTU A. ELEKTRONĠKDE BĠLĠNMESĠ GEREKEN TEMEL KONULAR a. AKIM i. Akımın birimi amperdir. ii. Akım I harfiyle sembolize edilir. iii. Akımı ölçen ölçü aleti ampermetredir. iv. Ampermetre
RİZE ÜNİVERSİTESİ MYO Bilgisayar Teknolojileri Bölümü Bilgisayar Programcılığı
 RİZE ÜNİERSİESİ MYO Bilgisayar eknolojileri Bölümü Bilgisayar Programcılığı *** BİLP 07 EMEL ELEKRONİK İZE SNA *** Not: Kalem, silgi vs. alışverişi kesinlikle yasaktır. Kurala uymayanların sınav kağıdı,
RİZE ÜNİERSİESİ MYO Bilgisayar eknolojileri Bölümü Bilgisayar Programcılığı *** BİLP 07 EMEL ELEKRONİK İZE SNA *** Not: Kalem, silgi vs. alışverişi kesinlikle yasaktır. Kurala uymayanların sınav kağıdı,
5.BÖLÜM ÇİZGİ İZLEYEN ROBOT
 5.BÖLÜM ÇİZGİ İZLEYEN ROBOT Çizgi izleyen robot bu kitapta yer alan yapımı en kolay robottur. Robotlar hakkında temel bilgileri edinebilmek için çizgi izleyen robot uygulamasını yapmak yeterli olacaktır.
5.BÖLÜM ÇİZGİ İZLEYEN ROBOT Çizgi izleyen robot bu kitapta yer alan yapımı en kolay robottur. Robotlar hakkında temel bilgileri edinebilmek için çizgi izleyen robot uygulamasını yapmak yeterli olacaktır.
GENEL KULLANIM İÇİN SABİT AKIM LED SÜRÜCÜLERİ. Uygulama Notları ACG-D350/500/700/1000 UYGULAMA NOTLARI. 1. LED adedi
 GENEL KULLANIM İÇİN SABİT AKIM LED SÜRÜCÜLERİ Uygulama Notları ACG D-Serisi sürücü devreleri düşük voltajla LEDleri sabit bir akımda çalıştırmak için ideal bir çözüm sunar. LEDlerin düşük voltajla çalıştığı,
GENEL KULLANIM İÇİN SABİT AKIM LED SÜRÜCÜLERİ Uygulama Notları ACG D-Serisi sürücü devreleri düşük voltajla LEDleri sabit bir akımda çalıştırmak için ideal bir çözüm sunar. LEDlerin düşük voltajla çalıştığı,
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı : IŞIĞA DÖNEN KAFA PROJESİ
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı : IŞIĞA DÖNEN KAFA PROJESİ Proje No : 2 Proje Raporu Adı: HALİL Soyadı: EMUL Öğrenci
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı : IŞIĞA DÖNEN KAFA PROJESİ Proje No : 2 Proje Raporu Adı: HALİL Soyadı: EMUL Öğrenci
SAKARYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ LABORATUARI
 SAKARYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ LABORATUARI DENEYİ YAPTIRAN: DENEYİN ADI: DENEY NO: DENEYİ YAPANIN ADI ve SOYADI:
SAKARYA ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ LABORATUARI DENEYİ YAPTIRAN: DENEYİN ADI: DENEY NO: DENEYİ YAPANIN ADI ve SOYADI:
ÖZEL EGE LİSESİ GÜNEBAKAN PANELLER
 ÖZEL EGE LİSESİ GÜNEBAKAN PANELLER HAZIRLAYAN ÖĞRENCİLER: Eren Ege AKAR Atlas Ferhat HACIMUSALAR DANIŞMAN ÖĞRETMEN: Nilüfer DEMİR İZMİR 2016 İÇİNDEKİLER 1.Projenin amacı...2 2. Giriş...2 3.Sonuçlar...5
ÖZEL EGE LİSESİ GÜNEBAKAN PANELLER HAZIRLAYAN ÖĞRENCİLER: Eren Ege AKAR Atlas Ferhat HACIMUSALAR DANIŞMAN ÖĞRETMEN: Nilüfer DEMİR İZMİR 2016 İÇİNDEKİLER 1.Projenin amacı...2 2. Giriş...2 3.Sonuçlar...5
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No.
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işığı Takip Eden Kafa - 2 Proje Raporu Adı, Soyadı, Öğrenci Numarası
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No Işığı Takip Eden Kafa - 2 Proje Raporu Adı, Soyadı, Öğrenci Numarası
İçerik. Ürün no.: SLE518I-K4/4-M12 Güvenlik tek ışın fotoelektrik sensör alıcı
 Ürün no.: 50134013 SLE518I-K4/4-M12 Güvenlik tek ışın fotoelektrik sensör alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve
Ürün no.: 50134013 SLE518I-K4/4-M12 Güvenlik tek ışın fotoelektrik sensör alıcı Şekil farklılık gösterebilir İçerik Teknik veriler Uygun verici Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve
Bu deneyde lab cihazlarının kullanımı için 4 uygulama yapılacaktır.
 Bu deneyde lab cihazlarının kullanımı için 4 uygulama yapılacaktır. Uygulama -1: Dirençlerin Seri Bağlanması Uygulama -2: Dirençlerin Paralel Bağlanması Uygulama -3: Dirençlerin Karma Bağlanması Uygulama
Bu deneyde lab cihazlarının kullanımı için 4 uygulama yapılacaktır. Uygulama -1: Dirençlerin Seri Bağlanması Uygulama -2: Dirençlerin Paralel Bağlanması Uygulama -3: Dirençlerin Karma Bağlanması Uygulama
mikroc Dili ile Mikrodenetleyici Programlama Ders Notları / Dr. Serkan DİŞLİTAŞ
 12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
12. Motor Kontrolü Motorlar, elektrik enerjisini hareket enerjisine çeviren elektromekanik sistemlerdir. Motorlar temel olarak 2 kısımdan oluşur: Stator: Hareketsiz dış gövde kısmı Rotor: Stator içerisinde
İ İŞİ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ
 İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
İ İŞİ İ BÖLÜM ROBOTİK KODLAMA ÖĞRENME ALANLARI BASİT ELEKTRONİK DEVRELERE GİRİŞ AKILLI CİHAZ TASARIMINA GİRİŞ ROBOTİĞE GİRİŞ HAZIRLAYAN MUSTAFA ÖZER BİLİŞİM TEKNOLOJİLERİ ÖĞRETMENİ makersardahan Küçük
ELK101 - ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİNE GİRİŞ
 ELK101 - Dr. Hilmi ZENK Elektrik-Elektronik Mühendisi Giresun Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü Bölümün tanıtılması Elektrik Elektronik Mühendisliğinin tanıtılması
ELK101 - Dr. Hilmi ZENK Elektrik-Elektronik Mühendisi Giresun Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölümü Bölümün tanıtılması Elektrik Elektronik Mühendisliğinin tanıtılması
BESLEME KARTI RF ALICI KARTI
 BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
BESLEME KARTI Araç üzerinde bulunan ve tüm kartları besleyen ünitedir.doğrudan Lipo batarya ile beslendikten sonra motor kartına 11.1 V diğer kartlara 5 V dağıtır. Özellikleri; Ters gerilim korumalı Isınmaya
T.C. ADIYAMAN ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ DEVRE ANALİZİ LABORATUVARI I DENEY FÖYLERİ
 T.C. ADIYAMAN ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ DEVRE ANALİZİ LABORATUVARI I DENEY FÖYLERİ Hazırlayan Arş. Gör. Ahmet NUR DENEY-1 ÖLÇÜ ALETLERİNİN İNCELENMESİ Kapaksız
T.C. ADIYAMAN ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ DEVRE ANALİZİ LABORATUVARI I DENEY FÖYLERİ Hazırlayan Arş. Gör. Ahmet NUR DENEY-1 ÖLÇÜ ALETLERİNİN İNCELENMESİ Kapaksız
Şekil 1: Zener diyot sembol ve görünüşleri. Zener akımı. Gerilim Regülasyonu. bölgesi. Şekil 2: Zener diyotun akım-gerilim karakteristiği
 ZENER DİYOT VE AKIM-GERİLİM KARAKTERİSTİĞİ Küçük sinyal diyotları, delinme gerilimine yakın değerlerde hasar görebileceğinden, bu değerlerde kullanılamazlar. Buna karşılık, Zener diyotlar delinme gerilimi
ZENER DİYOT VE AKIM-GERİLİM KARAKTERİSTİĞİ Küçük sinyal diyotları, delinme gerilimine yakın değerlerde hasar görebileceğinden, bu değerlerde kullanılamazlar. Buna karşılık, Zener diyotlar delinme gerilimi
1- KULLANILACAK DEVRE ELEMANLARININ TANITILMASI
 1- KULLANILACAK DEVRE ELEMANLARININ TANITILMASI ARDUINO UNO Arduino, kolaylıkla devreler tasarlayabileceğiniz, açık kaynak kodlu bir geliştirme platformudur. Arduino kullanmak için üst düzey bir elektronik
1- KULLANILACAK DEVRE ELEMANLARININ TANITILMASI ARDUINO UNO Arduino, kolaylıkla devreler tasarlayabileceğiniz, açık kaynak kodlu bir geliştirme platformudur. Arduino kullanmak için üst düzey bir elektronik
TEMEL ELEKTRONĠK DERSĠ
 TEMEL ELEKTRONĠK DERSĠ ÖĞRETMEYE YÖNELĠK TEST SORU BANKASI HAZIRLAYAN: Öğr.Gör.Aykut Fatih GÜEN 1 ÜNĠTE 1 TEST SORU BANKASI (TEMEL ELEKTRONĠK) DĠRENÇ SORULARI Aşağıdakilerden hangisi, pasif devre elemanlarının
TEMEL ELEKTRONĠK DERSĠ ÖĞRETMEYE YÖNELĠK TEST SORU BANKASI HAZIRLAYAN: Öğr.Gör.Aykut Fatih GÜEN 1 ÜNĠTE 1 TEST SORU BANKASI (TEMEL ELEKTRONĠK) DĠRENÇ SORULARI Aşağıdakilerden hangisi, pasif devre elemanlarının
KARABÜK ÜNİVERSİTESİ Öğretim Üyesi: Doç.Dr. Tamila ANUTGAN 1
 KARABÜK ÜNİVERSİTESİ Öğretim Üyesi: Doç.Dr. Tamila ANUTGAN 1 Elektriksel olaylarla ilgili buraya kadar yaptığımız, tartışmalarımız, durgun yüklerle veya elektrostatikle sınırlı kalmıştır. Şimdi, elektrik
KARABÜK ÜNİVERSİTESİ Öğretim Üyesi: Doç.Dr. Tamila ANUTGAN 1 Elektriksel olaylarla ilgili buraya kadar yaptığımız, tartışmalarımız, durgun yüklerle veya elektrostatikle sınırlı kalmıştır. Şimdi, elektrik
Temel elektronik laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz;
 L4 Laboratuvarı Temel elektronik laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Temel pasif devre elemanlarını öğrenir. Temel Elektrik-Elektronik büyüklükleri ve elemanların
L4 Laboratuvarı Temel elektronik laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Temel pasif devre elemanlarını öğrenir. Temel Elektrik-Elektronik büyüklükleri ve elemanların
13. ÜNİTE AKIM VE GERİLİM ÖLÇÜLMESİ
 13. ÜNİTE AKIM VE GERİLİM ÖLÇÜLMESİ KONULAR 1. Akım Ölçülmesi-Ampermetreler 2. Gerilim Ölçülmesi-Voltmetreler Ölçü Aleti Seçiminde Dikkat Edilecek Noktalar: Ölçü aletlerinin seçiminde yapılacak ölçmeye
13. ÜNİTE AKIM VE GERİLİM ÖLÇÜLMESİ KONULAR 1. Akım Ölçülmesi-Ampermetreler 2. Gerilim Ölçülmesi-Voltmetreler Ölçü Aleti Seçiminde Dikkat Edilecek Noktalar: Ölçü aletlerinin seçiminde yapılacak ölçmeye
1. Diyot Çeşitleri ve Yapıları 1.1 Giriş 1.2 Zener Diyotlar 1.3 Işık Yayan Diyotlar (LED) 1.4 Fotodiyotlar. Konunun Özeti
 1.4 Fotodiyotlar. Konunun Özeti") Elektronik Devreler 1. Diyot Çeşitleri ve Yapıları 1.1 Giriş 1.2 Zener Diyotlar 1.3 Işık Yayan Diyotlar (LED) 1.4 Fotodiyotlar Konunun Özeti * Diyotlar yapım tekniğine bağlı olarak; Nokta temaslı diyotlar,
Elektronik Devreler 1. Diyot Çeşitleri ve Yapıları 1.1 Giriş 1.2 Zener Diyotlar 1.3 Işık Yayan Diyotlar (LED) 1.4 Fotodiyotlar Konunun Özeti * Diyotlar yapım tekniğine bağlı olarak; Nokta temaslı diyotlar,
1) Seri ve paralel bağlı dirençlerin eşdeğer direncinin bulunması. 2) Kirchhoff akım ve gerilim yasalarının incelenmesi.
 Seri ve paralel bağlı dirençlerin eşdeğer direncinin bulunması. 2) Kirchhoff akım ve gerilim yasalarının incelenmesi.") DENEY 3. DİRENÇLERİN SERİ VE PARALEL BAĞLANMASI Amaç: 1) Seri ve paralel bağlı dirençlerin eşdeğer direncinin bulunması. 2) Kirchhoff akım ve gerilim yasalarının incelenmesi. Kuramsal Bilgi: Elektrik devrelerinde
DENEY 3. DİRENÇLERİN SERİ VE PARALEL BAĞLANMASI Amaç: 1) Seri ve paralel bağlı dirençlerin eşdeğer direncinin bulunması. 2) Kirchhoff akım ve gerilim yasalarının incelenmesi. Kuramsal Bilgi: Elektrik devrelerinde
9. ÜNİTE OHM KANUNU KONULAR
 9. ÜNİTE OHM KANUNU KONULAR 1. FORMÜLÜ 2. SABİT DİRENÇTE, AKIM VE GERİLİM ARASINDAKİ BAĞINTI 3. SABİT GERİLİMDE, AKIM VE DİRENÇ ARASINDAKİ BAĞINTI 4. OHM KANUNUYLA İLGİLİ ÖRNEK VE PROBLEMLER 9.1 FORMÜLÜ
9. ÜNİTE OHM KANUNU KONULAR 1. FORMÜLÜ 2. SABİT DİRENÇTE, AKIM VE GERİLİM ARASINDAKİ BAĞINTI 3. SABİT GERİLİMDE, AKIM VE DİRENÇ ARASINDAKİ BAĞINTI 4. OHM KANUNUYLA İLGİLİ ÖRNEK VE PROBLEMLER 9.1 FORMÜLÜ
BÖLÜM X OSİLATÖRLER. e b Yükselteç. Be o Geri Besleme. Şekil 10.1 Yükselteçlerde geri besleme
 BÖLÜM X OSİLATÖRLER 0. OSİLATÖRE GİRİŞ Kendi kendine sinyal üreten devrelere osilatör denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen ve testere
BÖLÜM X OSİLATÖRLER 0. OSİLATÖRE GİRİŞ Kendi kendine sinyal üreten devrelere osilatör denir. Böyle devrelere dışarıdan herhangi bir sinyal uygulanmaz. Çıkışlarında sinüsoidal, kare, dikdörtgen ve testere
TRANSİSTÖRLERİN KUTUPLANMASI
 DNY NO: 7 TANSİSTÖLİN KUTUPLANMAS ipolar transistörlerin dc eşdeğer modellerini incelemek, transistörlerin kutuplama şekillerini göstermek ve pratik olarak transistörlü devrelerde ölçüm yapmak. - KUAMSAL
DNY NO: 7 TANSİSTÖLİN KUTUPLANMAS ipolar transistörlerin dc eşdeğer modellerini incelemek, transistörlerin kutuplama şekillerini göstermek ve pratik olarak transistörlü devrelerde ölçüm yapmak. - KUAMSAL
LOJİK DEVRELER-I II. HAFTA DENEY FÖYÜ
 LOJİK DEVRELER-I II. HAFTA DENEY FÖYÜ 2 Bitlik Bir Sayının Karesini Bulan Devrenin Tasarlanması Deneyin Amacı: 2 bitlik bir sayının karesini hesaplayan devrenin tasarlanması, doğruluk tablosunun çıkartılması,
LOJİK DEVRELER-I II. HAFTA DENEY FÖYÜ 2 Bitlik Bir Sayının Karesini Bulan Devrenin Tasarlanması Deneyin Amacı: 2 bitlik bir sayının karesini hesaplayan devrenin tasarlanması, doğruluk tablosunun çıkartılması,
K.T.Ü Elektrik-Elektronik Müh.Böl. Temel Elektrik Laboratuarı II
 K.T.Ü Elektrik-Elektronik Müh.Böl. Temel Elektrik Laboratuarı II DENEY NO: 5 DOĞRU AKIM KÖPRÜLERİ A-WHEATSTONE KÖPRÜSÜ : --------------------------------------------- Bu köprü ile değeri 1 ohm ile 1 mega
K.T.Ü Elektrik-Elektronik Müh.Böl. Temel Elektrik Laboratuarı II DENEY NO: 5 DOĞRU AKIM KÖPRÜLERİ A-WHEATSTONE KÖPRÜSÜ : --------------------------------------------- Bu köprü ile değeri 1 ohm ile 1 mega
EEM0108 Elektrik-Elektronik Mühendisliğinde Malzeme Aktif ve Pasif Devre Elemanları. Yrd.Doç.Dr. Muhammed Fatih KULUÖZTÜRK
 EEM0108 Elektrik-Elektronik Mühendisliğinde Malzeme Aktif ve Pasif Devre Elemanları mfkuluozturk@beu.edu.tr MALZEMELERİN SINIFLANDIRILMASI ÖZELLİKLERİNE GÖRE Elektriksel Özellikler Manyetik Özellikler
EEM0108 Elektrik-Elektronik Mühendisliğinde Malzeme Aktif ve Pasif Devre Elemanları mfkuluozturk@beu.edu.tr MALZEMELERİN SINIFLANDIRILMASI ÖZELLİKLERİNE GÖRE Elektriksel Özellikler Manyetik Özellikler
- Gerilme ve Gerinme ikinci dereceden tensörel büyüklüklerdir. (3 puan)
") MAK437 MT2-GERİLME ÖLÇÜM TEKNİKLERİ SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ I. öğretim II. öğretim A şubesi B şubesi ÖĞRENCİ ADI NO İMZA TARİH 30.11.2013 SORU/PUAN
MAK437 MT2-GERİLME ÖLÇÜM TEKNİKLERİ SÜLEYMAN DEMİREL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ I. öğretim II. öğretim A şubesi B şubesi ÖĞRENCİ ADI NO İMZA TARİH 30.11.2013 SORU/PUAN
Sensörler. Yrd.Doç.Dr. İlker ÜNAL
 Sensörler Yrd.Doç.Dr. İlker ÜNAL Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin
Sensörler Yrd.Doç.Dr. İlker ÜNAL Optokuplör Optokuplör kelime anlamı olarak optik kuplaj anlamına gelir. Kuplaj bir sistem içindeki iki katın birbirinden ayrılması ama aralarındaki sinyal iletişiminin
2- İşverenler işyerlerinde meydana gelen bir iş kazasını en geç kaç iş günü içerisinde ilgili bölge müdürlüğüne bildirmek zorundadır?
 1- Doğa ve çevreye fazla zarar vermeden devamlı ve kaliteli bir hizmet veya mal üretimi sırasında iş kazalarının meydana gelmemesi ve meslek hastalıklarının oluşmaması için alınan tedbirlerin ve yapılan
1- Doğa ve çevreye fazla zarar vermeden devamlı ve kaliteli bir hizmet veya mal üretimi sırasında iş kazalarının meydana gelmemesi ve meslek hastalıklarının oluşmaması için alınan tedbirlerin ve yapılan
İçerik. Ürün no.: LS5I/9D-P1 Tek yön çalışan sensör verici
 Ürün no.: 50130543 LS5I/9D-P1 Tek yön çalışan sensör verici Şekil farklılık gösterebilir İçerik Teknik veriler Uygun alıcı Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Ürün no.: 50130543 LS5I/9D-P1 Tek yön çalışan sensör verici Şekil farklılık gösterebilir İçerik Teknik veriler Uygun alıcı Boyutlandırılmış çizimler Elektrik bağlantısı Kumanda ve gösterge Aksesuarlar
Elektrik Mühendisliğine Giriş (EE 234) Ders Detayları
 Ders Detayları") Elektrik Mühendisliğine Giriş (EE 234) Ders Detayları Ders Adı Ders Dönemi Ders Kodu Saati Uygulama Saati Laboratuar Kredi AKTS Saati Elektrik Mühendisliğine Giriş EE 234 Her İkisi 2 2 0 3 5 Ön Koşul Ders(ler)i
Elektrik Mühendisliğine Giriş (EE 234) Ders Detayları Ders Adı Ders Dönemi Ders Kodu Saati Uygulama Saati Laboratuar Kredi AKTS Saati Elektrik Mühendisliğine Giriş EE 234 Her İkisi 2 2 0 3 5 Ön Koşul Ders(ler)i
ADIYAMAN ÜNĠVERSĠTESĠ MÜHENDĠSLĠK FAKÜLTESĠ ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ DEVRE ANALĠZĠ LABORATUVARI-II DENEY RAPORU
 ADIYAMAN ÜNĠVERSĠTESĠ MÜHENDĠSLĠK FAKÜLTESĠ ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ DEVRE ANALĠZĠ LABORATUVARI-II DENEY RAPORU DENEY NO : DENEYĠN ADI : DENEY TARĠHĠ : DENEYĠ YAPANLAR : RAPORU HAZIRLAYANIN
ADIYAMAN ÜNĠVERSĠTESĠ MÜHENDĠSLĠK FAKÜLTESĠ ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ DEVRE ANALĠZĠ LABORATUVARI-II DENEY RAPORU DENEY NO : DENEYĠN ADI : DENEY TARĠHĠ : DENEYĠ YAPANLAR : RAPORU HAZIRLAYANIN
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER. Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul
 OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI
 DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI Karamanoğlu Mehmetbey Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Devre ve Elektronik Laboratuvarında yer alan her bir masada aşağıda isim ve özellikleri
DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI Karamanoğlu Mehmetbey Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Devre ve Elektronik Laboratuvarında yer alan her bir masada aşağıda isim ve özellikleri