TÜBİTAK 2209-B SANAYİYE YÖNELİK LİSANS BİTİRME TEZİ DESTEKLEME PROGRAMI
|
|
|
- Belgin Karabulut
- 5 yıl önce
- İzleme sayısı:
Transkript

1 TÜBİTAK 2209-B SANAYİYE YÖNELİK LİSANS BİTİRME TEZİ DESTEKLEME PROGRAMI 6 SERBESTLİK DERECELİ, MAFSALLI ENDÜSTRİYEL ROBOT KOL TASARIMI VE PROTOTİP ÜRETİMİ KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Otomasyon Sistemleri Tematik Alanı Robotik Teknolojileri Tematik Alanı Proje Sorumlusu : Mehmet GÜR Proje Sorumlusu Öğ. Num. : Projeye İlgi Duyan Kurum Proje Danışmanı : Eurasia Robotic İstanbul Türkiye : Prof. Dr. Ahmet DEMİR 1
2 İçindekiler 1.Özet Motivasyon Problem Tanımı ve Projenin İçerdiği Yenilik Unsuru Projede Kullanılacak Yöntem ve Metodlar Proje İş-Zaman Planı Sonuç Tasarım ve Analiz Çıktıları Kaynaklar
3 1.Özet Çağımızda iş verimliliğini artırmanın yanı sıra eş ve yüksek kalitede parçalar imal etmek, ayrıca çok daha insancıl çalışma koşulları sağlamak üzere pek çok endüstri dalında robotlar devreye girmiş bulunmaktadır. Endüstriyel robotlarla ilgili olarak çok sayıda tanım yapılmış olmakla birlikte, sanayi robotunun en kapsamlı tanımı ISO 8373 standardında yapılmıştır. Bu tanıma göre endüstriyel robot; Endüstriyel uygulamalarda kullanılan, sabit veya hareketli olabilen, üç veya daha fazla programlanabilir eksene sahip, otomatik kontrollü, yeniden programlanabilir çok amaçlı manipülatördür. Robotları diğer makinalardan ayıran anahtar sözcükler ise yeniden programlanabilme ve manipülatör dür. Manipülatör, genellikle birkaç serbestlik derecesine sahip, nesneleri tutmak ve hareket ettirmek için, eklemli ya da birbirine göre bağıl kayma hareketi yapan parça dizilerinden oluşan mekanizma olup kısaca robotun kolu, bileği, eli olarak da nitelendirilebilir. Projede, endüstriyel uygulamalarda kullanılabilecek 4 eksenli robot kol tasarlanıp otomasyon sistemlerine entegre çalışabilecek şekilde programlanması ve amaç bölümde bahsedeceğim üzere çalışma uzayındaki kayıplar azaltılarak hassas bir şekilde çalışması hedeflenmektedir. 2. Motivasyon Bu alanda bir proje üzerinde çalışma isteğim, otomasyon sistemleri üzerinde çalışmış, staj yapmış olmam ve bu sistemlere ilgimin fazla olmasıdır. Lisansımı bitirmekte olduğum günlerde bitirme tezi ve projem kapsamında bu sistemleri derinlemesine irdeleyip, daha verimli çalışması için yeni tasarımlar geliştirmek istemekteyim. Projede istenilen sonuçlar başarılı bir şekilde elde edildiği takdirde çalışma uzayı artırılan bir robot koldan alınan veriminde doğru oranda artacağı aşikardır. Elde edilen sonucu özetlemek gerekirse boynumuzu 360 derece döndürdüğümüzü ve böyle bir durumun bize neler kazandırabileceklerini düşünelim.evet bahsettiğim tam olarak bu ne kadar geniş bir alana hakim olursak bizim için hayat o kadar kolay olacaktır.verdiğim bu örnek robot kolu kullanacak olan bir fabrika için de aynı şeyi ifade edecektir. Eurasia Robotic İstanbul merkezli olarak İkitelli Organize Sanayi bölgesinde kurulmuştur. Plastik enjeksiyon sanayine yönelik özel otomasyon sistemleri ile kalıp içi etiketleme (In Mould Labelling) robotları üretmektedir. 3
4 Robotik sistemlerde; tasarım, imalat süreci, mekanik montaj, elektrik-pnömatik montaj, yazılım ve test işlemleri EURASIA ROBOTIC tarafından kendi üretim tesislerinde yapılmaktadır. Bunlara bir bütün olarak müşterilerine yerinde kurulum Eurasia Robotic in yüksek donanımlı teknisyenleri tarafından yapılmaktadır. Firma bahsettiğim üzere IML robotları üretmektedir.bu robotlar plastik enjeksiyon makinelerinin içerisine plastik kutunun ( Gıda,Boya vs maddeler için kullanılan kutular ) etiketini bırakır ve plastik kutu üretildikten sonra enjeksiyonun içerisine tekrar girip kutuyu alıp konveyör bandına yerleştiren cihazdır. Prototiplenen robot koldan istenen sonuçlar alındığında aynı sistem uygulanarak endüstri çalışma şartlarına uygun bir robot kol üretildiği takdirde çoğu sektörde kullanılabilecek bir projedir. Bu sektör ve çalışabileceği işler için örnek verilmesi gerekirse; Otomotiv sektöründe; Boya, kaynak, kalite kontrol vs. Elektronik sanayide; Montaj, kalite kontrol, boya, nakliye, paketleme vs. Gıda sanayide; Üretim, paketleme, nakliye, etiketleme vs. Sektörler ve çalışma ortamları artırılarak devam edebilir. Kullanılacak Malzemeler Endüstriyel Robot Kolun Gövde Malzemeleri 3D Yazıcı Baskıları :1000 TL Akrilik boya, fırça, aseton :100 TL Somun, cıvata,pul vs :100 TL 3 Metre kayış :60 TL 10x1000x1000 Kontraplak :100 TL Yay seti :100 TL 5 x Kasnak :100 TL Yapıştırıcılar, Silikon Tabancası :60 TL 60zz Rulman x 20 :60 TL 4
5 Elektromekanik malzemeler Elektronik Malzemeler M8 krom kaplı indiksüyonlu mil (3m) :60 TL Tane bilya X 60 :120 TL Step Motor x 5 :750 TL Servo Motor x 2 :50 TL Arduino Mega 2560 R3 :200 TL Motor Sürücü Elemanları x 5 :100 TL 12V 20 A Güç Kaynağı :100 TL 7 ınch Nextion HMI Dokunmatik TFT lcd Ekran :400 TL Baskı Devre Malzemeleri :100 TL Bağlantı Kabloları (20m) :40 TL 12v 0.4A 120x120 Fan X 2 :50 TL Jumper Kablo Seti :50 TL Kitap Giderleri :300 TL Toplam 3. Problem Tanımı ve Projenin İçerdiği Yenilik Unsuru :4000 TL Endüstriyel robotlar genel olarak zemine sabit bir gövde üzerinde motorlar aracılığı ile eksenel hareketlerini gerçekleştiren bir makinedir. Bu makinelerde manipülatörlerin geniş bir çalışma uzayına sahip olması istenmektedir. Günümüz sanayisinde kullanılan endüstriyel robotlarda ise bu çalışma uzayı %100 verimli bir şekilde kullanılamamaktadır. Verimli kullanılamamasındaki nedenlerden birisi robot kolun bağlı olduğu, dönerek çevresel hareketin gerçekleştirildiği omuz olarak da ifade edilen bölümün 360 derecelik açıda dönememesidir.bu sorundan kaynaklı olarak robot kol uzayına dahil olabilecek olan bir alan robot kol tarafından kör nokta olarak algılanır ve çalışma alanı daralarak verimden kayıp oluşmaktadır. 5
6 Şekil 1. Şekil 2. 6
7 Şekil 1. ve Şekil 2. de farklı çalışma tiplerine sahip iki endüstriyel robot kolun çalışma uzayları görülmektedir.bu iki robot kolda göze çarpan ilk ortak nokta çalışma uzaylarındaki kayıptır.şekil 2. de ki kayıp, çevresel hareketinde 60 derece olarak görülmektedir. Projenin içerdiği yenilik ve bu proje üzerinde ki çalışma amacım endüstriyel robot kollarda meydana gelen bu kaybın ortadan kaldırılmasıdır. Yeni kullanılacak olan sistem ile robot koldan maksimum verim alınması hedeflenmektedir. Uygulanmak istenen bu yenilikler başarı ile sisteme entegre edildiği takdirde. İyileştirilmiş bu yeni sistem ile Ulusal düzeyde bir başarı yakalanacaktır. Başarı ile prototipleme işlemi gerçekleştirilen Robot kolun daha büyük çaplarda yerli olarak üretilmesi için gerekli destek ve ar-ge ortamı sağlandığı takdirde Uluslararası düzeyde ses getirecek bir proje olacaktır. 4. Projede Kullanılacak Yöntem ve Metodlar Proje fikrinin uygulanabilmesi için öncelikle mekanik olarak yeni tasarımlar gerekmektedir. Omuz olarak bahsettiğim bölümde yeni tasarımlar geliştirilerek hareket alanındaki kısıtlamanın ortadan kaldırılması hedeflenmekte. Tasarımdaki iyileştirmenin ardından bir diğer sorun olarak karşımıza motorlar ve kontrol kartının haberleşmesi için kullanılan kablolar çıkmaktadır.her bir manipülatörün birbirinden bağımsız hareketini gerçekleştirdiği bu sistemde kablolardan dolayı kolların yaptığı yönelimler de kısıtlanmaktadır.bu bağlantı ve haberleşme için yeni metodlar geliştirilerek diğer uzuvların hareketlerinde de iyileştirmeler yapılması hedeflenmektedir. Robot kolun tasarım ve simülasyonları katı modelleme programı olan Solidworks yardımı ile gerçekleştirilecektir. Gerekli tüm analizler yapıldıktan sonra robot kolun prototiplenmesi için 3 boyutlu yazıcı kullanılacaktır.çıktısı alınan parçalar çeşitli montajlama ekipmanları ile (somun, cıvata, rulman, mil vb) şase toplanıp robot kol bir araya getirilecektir. Manipülatörlerin hareketini sağlamak için step motor kullanılacaktır.step motor kullanılmak istenmesindeki sebeplerden bahsetmek gerekirse; Adımlarındaki hata sayısı düşüktür ve bir adımdaki hata diğer adımdaki hatayı etkilememektedir. Motorlar durmak, yön değiştirmek ve harekete başlamak için gönderilen sinyallere çabuk cevap vermektedir. Motorların hareketlerinde konum hatası yoktur Hem DC hem de Servo motor gibi kullanılabilmektedir. 7
8 Robot kolun programlanması için Atmel Atmega2560 mikro denetleyicisi, step motorların sürülebilmesi içinde A4988 entegresi ve devre elemanları kullanılacaktır.atmel Atmega2560 mikro işlemcisi programlanıp üretilen PWM sinyalleri motorlara gönderilerek manipülatörlerin hareketi sağlanacaktır.bu programlama ile robot kolun istenilen açılarda hareketini gerçekleştirip verilen görevi hassasiyeti yüksek bir şekilde gerçekleştirmesi hedeflenmektedir. Robot kolun kontrolü ve diğer işlemlerini gerçekleştirmesi için HMI Dokunmatik TFT LCD ekran kullanılarak bir arayüz tasarlanacaktır.arayüzün bulunduğu konsolun sisteme katacağı avantaj, herhangi bir operatörün hızlı bir şekilde robotu kullanmayı öğrenebilecek olması ve gerekli girdileri bu ekrandan yapabilecek olmasıdır. Robot kolun hareket uzayı içerisinde bir çalışma senaryosu oluşturulacak. Oluşturulan bu senaryo ile robot kol bir otomasyon sistemi gibi davrandırılıp aynı işi herhangi bir komut verilmediği sürece tekrar ettirilmesi hedeflenmekte. Bu çalışma robotun kinematik denklemleri çıkartılarak gerçekleştirilecektir. Malzemelerin Şekil 3. de gösterilen devre şemasına göre çalışma prensibi şöyledir: Robotun kontrol ünitesi olan HMI Dokunmatik TFT ekran programlanır ve kontrol ara yüzü oluşturulur. Bu kontrol ünitesinin kontrol kartı ile olan bağlantısı aracılığı ile haberleşme gerçekleşir. Kontrol kartına bağlantısı yapılan Pcb kart üzerinde motor sürücü devreleri bulunmaktadır. Bu devreden motorlara bağlantılar yapılır.step motorlar manipülatörlerdeki hareket için servo motor ise gripperin açılıp kapanması için kullanılacaktır.ana program kontrol kartında işlenmektedir.kontrol ünitesinden(hmi Dokunmatik ekran) verilen komutlar seri haberleşme ile kontrol kartına iletilir ve motorların bağlı olduğu manipülatörler çalışma uzayını %100 verimle kullanarak hareketlerini gerçekleştirmiş olur. 8

9 Şekil 3. Sistemin Çalışma Şeması 9
10 5. Proje İş-Zaman Planı Görev Aşaması Başlangıç Tarihi Bitiş Tarihi Süreç (Gün) Tasarım ve Analiz Malzeme Temini İmalat ve Montaj Elektronik Montaj ve Programlama Testler Proje Çıktılarının Değerlendirilmesi Sonuç Sanayi teknolojileri üzerinde adım adım ilerlemekte olan ülkemizin sadece belirli sektörlerde değil her sektör de söz sahibi bir ülke olması gerektiğinin bilincindeyiz. Dünyada Endüstri 4.0 devrimi yaşanmakta olup bu sektörde belirli firmaların ürettiği Robot Kollar kullanılmaktadır. Bu firmalardan başlıcaları Kuka, Fanuc, Yaskawa, ABB gibi şirketlerdir.üretimde kalite, hız, güvenlik gibi faktörlerin artırılması için ülkemizce de robotik sistemlerin üzerinde çalışmalara daha fazla ağırlık verilmeli ve uygulama yelpazesinin genişletilmesi gerekmektedir. 18. ve 19. Yüzyıllarda Avrupa nın buhar gücünün sanayide kullanmasıyla bir sanayi devrimi yaşanmış ve buhar ile çalışan makineler, makineleşmiş endüstriyi doğurmuştur. Sanayide yaşanan bu devrim ile teknolojinin ve üretimin kalbi Avrupa ve bu teknolojiyi kullanan ülkeler olmuştur. Bahsetmiş olduğum bu tarihi olaya benzer sıçrayışları içinde bulunduğumuz anda dünyamız her gün farklı sektörlerde yaşamaktadır. Bizim yapmamız gereken ise dünyadan uzak kalmayıp teknolojileri takip edip, onlar üzerine çalışıp, iyileştirmelerde bulunup dünya piyasasına sunmaktır. Projede yerli olarak tasarlanıp üretilmek istenen sistem, kendi kategorisindeki robot kollardan çalışma alanı ve hareket kabiliyeti olarak üstün olması hedeflenmektedir. Çalışma uzayı arttırılmış sistemi, çalışılan bir işteki işçi/çalışan sayısını arttırmak olarak ifade edebiliriz. Bu şekilde üretilecek olan robot kolu kullanan firmada iş gücü,verim ve üretim hızı artacaktır. Üretilecek olan prototip ile araştırma-geliştirme süreci devam ettirilecek ve bu alanda yerli imkanlarla gelişen teknoloji ile endüstri de olduğundan daha fazla söz sahibi bir Türkiye ye zemin oluşturulacaktır 10

11 TASARIM MONTAJ GÖRÜNTÜSÜ 11

12 1.Base Robot Kol Parçaları İşlev ve Görünüşleri Bu bölüm robot kolun gövdesi olarak da isimlendirebileceğimiz zemine sabit olup manipülatörlerin bu gövde üzerinde hareketini gerçekleştireceği, içerisine programlama kartı, güç kaynağı ve diğer ekipmanların muhafaza edileceği bölümdür. 2.Omuz Bu bölüm robot kolun gövdesine bağlı olarak hareketini gerçekleştirecek olan ilk eksendir. Projenin amaçlarında birisi çalışma alanını arttırmaktı ve bu iyileştirmeyi omuz kısmında yapılacak olan hareket ile çalışma uzayını 360 derecelik bir alana çıkartılacaktır. Omuz hareketini gövde kısmına bağlı olan bir motordan tahrik alarak omuz kısmına ek tasarlanmış parçaya (İç dişli) gücü aktarması ile hareketinin gerçekleştirmesi beklenmektedir. Omuz kısmına ek 2 motor bağlanacaktır bu motorlar Manipülatör 1 in hareketini gerçekleştirmesini sağlayacaktır. Bağlanacak olan Step motorların ölçüleri değişiklik göstereceğinden yuvaları açılmamıştır. 12

13 3.İç Dişli İç dişli omuza monte edilerek gövdeye bağlı olan motordan tahrik alacak ve gücü Omuza aktarıp hareketi gerçekleştirecek olan parçadır. Parçaların montajı 10 adet metrik 4x40 vida ve somunlar ile yapılacaktır. 13


14 4.Omuz Dişli Kapak Bu kapak yardımı ile omuza monte edilen dişliyi gövde üzerinde bulunan rulman bilyeleri üzerine oturtup sabitleme işlemi gerçekleştirilecektir. 14


15 Montaj Kesit Görüntüsü Manipülatör Bu bölüm 6 adet parçanın montajı ile oluşmaktadır.2 taraftan motor ile hareketini gerçekleştirmektedir. Bu hareket dişli kasnak sistemi ile sağlanmaktadır. Motor olarak yine Step motor kullanılacaktır. Kolun iki ucu arası ölçüsü 360 mm dir. 15
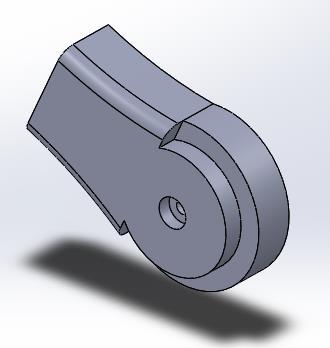



16 16
 Motorlardan alınan gücü manipülatörlere aktarmak için kullanılan ara elemandır.")

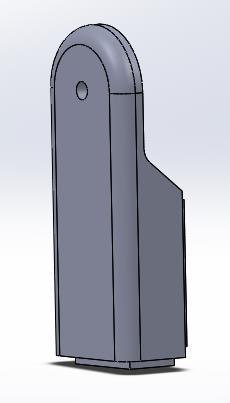
17 Montaj Görüntüsü 6.Dişli (Gear) Motorlardan alınan gücü manipülatörlere aktarmak için kullanılan ara elemandır Manipülatör Bu bölüm 5 adet parçanın montajı ile oluşmaktadır.1 taraftan motor ile hareketini gerçekleştirmektedir. Bu hareket dişli kasnak sistemi ile sağlanmaktadır. Motor olarak yine Step motor kullanılacaktır. Kolun iki ucu arası ölçüsü 312,5 mm dir. 17



18 18

19 Montaj Görüntüsü 7.3. Manipülatör Bu bölüm dişli ve şase olmak üzere iki bölümden oluşur. Kullanılacak olan Gripper ın (Uç İşlevcisi) sabitleneceği bölümdür. Yapısı ve tasarımında dolayı çeşitli gripper ların robot kolda kullanılmasına izin verir. Hareketini Step motor ile gerçekleştirir. Ekstra olarak bu parçaya MG995 Servo motor gömülür ve gripperin çevresel hareketi gerçekleştirilir. 19



20 8. Gripper ( Uç İşlevcisi ) Yapmış olduğum tasarım 3 parmak gripper tarzı olarak geçmektedir.3 Adet uzuvun merkezde birleşerek istenilen objeyi güçlü bir şekilde kavramasıyla işlemi gerçekleştirmektedir.bu sistem 1 adet MG995 Servo motor ile çalışmasını gerçekleştirmektedir. 3. manipülatörün modüler yapısından ötürü iş çeşitliliğine göre kullanılacak olan gripper ve görevi değiştirilebilir, çok amaçlı bir robot olarak kullanılabilir. 20
21 7. Kaynaklar 1. *(1. bölümünde giriş) 2. *(4.bölümde step motor avantajları) 3. *(Şekil 1. ve Şekil 2. Görselleri) 4. *(2. Bölümde Eurasia Robotic tanıtımı) 21
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ENDÜSTRİYEL ROBOT KOL KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ
 TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ENDÜSTRİYEL ROBOT KOL KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Endüstri 4.0 Tematik
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ENDÜSTRİYEL ROBOT KOL KARABÜK ÜNİVERSİTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Endüstri 4.0 Tematik
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
Endüstriyel Otomasyon
 Endüstriyel Otomasyon Endüstriyel otomasyon çok geniş kapsamlı bir konu olmakla birlikte temel olarak makinaların ve proseslerin otomatik kontrolü olarak tanımlanabilir. PLC, HMI paneller ve scada kullanılarak
Endüstriyel Otomasyon Endüstriyel otomasyon çok geniş kapsamlı bir konu olmakla birlikte temel olarak makinaların ve proseslerin otomatik kontrolü olarak tanımlanabilir. PLC, HMI paneller ve scada kullanılarak
VOLÜMETRİK DEBİMETRE KDDM 2
 VOLÜMETRİK DEBİMETRE KDDM 2 Volümetrik debimetre nedir?? Fark basınç ölçümü ile hava akış verimini kontrol etmenizi sağlayan, bakım gerektirmeyen, yenilikçi bir Pnömatik otomasyon kontrol sistemidir, bu
VOLÜMETRİK DEBİMETRE KDDM 2 Volümetrik debimetre nedir?? Fark basınç ölçümü ile hava akış verimini kontrol etmenizi sağlayan, bakım gerektirmeyen, yenilikçi bir Pnömatik otomasyon kontrol sistemidir, bu
İSTANBUL TEKNİK ÜNİVERSİTESİ İMALAT MÜHENDİSLİĞİ PROGRAMI BAHAR IML-322 İMALATTA OTOMASYON ÖDEV 1 Çözümü Y.Doç. Dr.
 İSTANBUL TEKNİK ÜNİVERSİTESİ İMALAT MÜHENDİSLİĞİ PROGRAMI BAHAR 2009-2010 IML-322 İMALATTA OTOMASYON ÖDEV 1 Çözümü Y.Doç. Dr. Erdinç ALTUĞ Problem 1. (10 Puan) Gündelik hayatımızda karşımıza çıkan herhangi
İSTANBUL TEKNİK ÜNİVERSİTESİ İMALAT MÜHENDİSLİĞİ PROGRAMI BAHAR 2009-2010 IML-322 İMALATTA OTOMASYON ÖDEV 1 Çözümü Y.Doç. Dr. Erdinç ALTUĞ Problem 1. (10 Puan) Gündelik hayatımızda karşımıza çıkan herhangi
MASA ÜSTÜ 3 EKSEN CNC DÜZ DİŞLİ AÇMA TEZGAHI TASARIMI ve PROTOTİP İMALATI
 MASA ÜSTÜ 3 EKSEN CNC DÜZ DİŞLİ AÇMA TEZGAHI TASARIMI ve PROTOTİP İMALATI Salih DAĞLI Önder GÜNGÖR Prof. Dr. Kerim ÇETİNKAYA Karabük Üniversitesi Tasarım ve Konstrüksiyon Öğretmenliği ÖZET Bu çalışmada
MASA ÜSTÜ 3 EKSEN CNC DÜZ DİŞLİ AÇMA TEZGAHI TASARIMI ve PROTOTİP İMALATI Salih DAĞLI Önder GÜNGÖR Prof. Dr. Kerim ÇETİNKAYA Karabük Üniversitesi Tasarım ve Konstrüksiyon Öğretmenliği ÖZET Bu çalışmada
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Temizlik Robotu Yetkin AKKAŞ (2015210225003) Danışman Prof. Dr. Ahmet DEMİR 2018 ÖZET Teknolojinin ilerlemesiyle birlikte insanların
KARABÜK ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ Temizlik Robotu Yetkin AKKAŞ (2015210225003) Danışman Prof. Dr. Ahmet DEMİR 2018 ÖZET Teknolojinin ilerlemesiyle birlikte insanların
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI
 5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. asaf_varol@yahoo.com Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
Profesyonel, verimli, yenilikçi sistemler...
 ARKE Otomasyon Bil. Mak. San. ve Tic. Ltd. Şti. Atilla KARAÇAY Ramazan EKİN Proje & Yazılım 0.533 430 19 45 Üretim & Satış 0.533 223 13 46 atilla.karacay@arkeotomasyon.com ramazan.ekin@arkeotomasyon.com
ARKE Otomasyon Bil. Mak. San. ve Tic. Ltd. Şti. Atilla KARAÇAY Ramazan EKİN Proje & Yazılım 0.533 430 19 45 Üretim & Satış 0.533 223 13 46 atilla.karacay@arkeotomasyon.com ramazan.ekin@arkeotomasyon.com
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
HİKAYEMİZ. RobCell Robotik Mekatronik Mühendislik Teknolojileri A.Ş
 HİKAYEMİZ Robcell Robotik Mekatronik Mühendislik Teknolojileri A.Ş, 2017 yılında Bursa da robotik ve mühendislik sektöründe faaliyete başladı. Teknoloji bir fikir değil, fikri elde etme yoludur dedik ve
HİKAYEMİZ Robcell Robotik Mekatronik Mühendislik Teknolojileri A.Ş, 2017 yılında Bursa da robotik ve mühendislik sektöründe faaliyete başladı. Teknoloji bir fikir değil, fikri elde etme yoludur dedik ve
NRM Makina Teknolojisiyle Endüstriye Değer Katıyor. Kalitemizin Temelinde Ar-Ge Var
 NRM Makina Teknolojisiyle Endüstriye Değer Katıyor NRM Makina, imalat sektöründe faaliyet gösteren tüm firmalar için robotik otomasyon sistemleri üreten bir teknoloji şirketidir. Türkiye deki ve dünyadaki
NRM Makina Teknolojisiyle Endüstriye Değer Katıyor NRM Makina, imalat sektöründe faaliyet gösteren tüm firmalar için robotik otomasyon sistemleri üreten bir teknoloji şirketidir. Türkiye deki ve dünyadaki
CATCRANE. Güçlü tasarım departmanı sayesinde her işletmenin ihtiyaçlarına göre esnek projelerde zorlanmadan sonuca ulaşılabilmektedir.
 CATCRANE Yıllarca sahip olunan tecrübeleri artık ürüne dönüştürmüş ihtiyaç sahiplerine mühendislik ve kalite adına yeni hızlı ve kalıcı çözümler sunmayı hedeflemiş genç bir firmadır. Güçlü tasarım departmanı
CATCRANE Yıllarca sahip olunan tecrübeleri artık ürüne dönüştürmüş ihtiyaç sahiplerine mühendislik ve kalite adına yeni hızlı ve kalıcı çözümler sunmayı hedeflemiş genç bir firmadır. Güçlü tasarım departmanı
Sektöre ÖzgüRedüktörler - 1
 Sektöre ÖzgüRedüktörler - 1 Yılmaz Redüktörün standart üretim yelpazesinin içerisinde genel kullanım amaçlı üretilen redüktörlerin dışında sektöre özgü imal edilmiş özel redüktörlerde bulunmaktadır. Bu
Sektöre ÖzgüRedüktörler - 1 Yılmaz Redüktörün standart üretim yelpazesinin içerisinde genel kullanım amaçlı üretilen redüktörlerin dışında sektöre özgü imal edilmiş özel redüktörlerde bulunmaktadır. Bu
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
MEKATRONİĞİN TEMELLERİ
 MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
MEKATRONİĞİN TEMELLERİ Teknik Bilimler Meslek Yüksekokulu Mekatronik Programı Yrd. Doç. Dr. İlker ÜNAL Vize %30 Dersin Koşulları Final %60 Ödev %10 Dersin Konuları Mekatronik Sistemler Birimler ve Ölçme
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş
 Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
Derste Neler Anlatılacak? Temel Mekatronik Birimler,temel birim dönüşümü Güncel konular(hes,termik Santral,Rüzgar Enerjisi,Güneş Enerjisi,Doğalgaz,Biyogaz vs.) Mekatroniğin uygulama alanları Temel Mekanik
 ANKARA PROFESYONEL MAKİNA KALIP PLASTİK YAPI EĞİTİM SANAYİ VE TİCARET LİMİTED ŞİRKETİ HAKKIMIZDA ANKARA PROFESYONEL MAKİNA ; yenilikçi, istihdam ve gelir arttırıcı projeleri ile kuruluşların rekabet güçlerini
ANKARA PROFESYONEL MAKİNA KALIP PLASTİK YAPI EĞİTİM SANAYİ VE TİCARET LİMİTED ŞİRKETİ HAKKIMIZDA ANKARA PROFESYONEL MAKİNA ; yenilikçi, istihdam ve gelir arttırıcı projeleri ile kuruluşların rekabet güçlerini
PRES BESLEME SİSTEMLERİ
 PRES BESLEME SİSTEMLERİ ADRES Esenşehir Mah.Muradiye Sok. No:56/A ümraniye- istanbul TEL: (0216) 540 67 06 Faks: (0216) 540 67 07 TEL: (0535) 434 44 96 TEL: (0532) 223 74 55 pressline@outlook.com PRESSline
PRES BESLEME SİSTEMLERİ ADRES Esenşehir Mah.Muradiye Sok. No:56/A ümraniye- istanbul TEL: (0216) 540 67 06 Faks: (0216) 540 67 07 TEL: (0535) 434 44 96 TEL: (0532) 223 74 55 pressline@outlook.com PRESSline
Vidalı Kriko. Polimak Grup Endüstriyel Üretim San. AŞ Sok No: Ostim ANKARA Tel: Faks:
 Vidalı Kriko Polimak Grup Endüstriyel Üretim San. AŞ. 1232. Sok No: 25-27 Ostim ANKARA www.polimak.com Tel: +90312 3540976 Faks: +90312 3850394 1 Vidalı Kriko POLİMAK Grup Endüstriyel Üretim Sanayi A.Ş.
Vidalı Kriko Polimak Grup Endüstriyel Üretim San. AŞ. 1232. Sok No: 25-27 Ostim ANKARA www.polimak.com Tel: +90312 3540976 Faks: +90312 3850394 1 Vidalı Kriko POLİMAK Grup Endüstriyel Üretim Sanayi A.Ş.
Kanber SEDEF. Kişisel Bilgi. Milliyet: T.C. Doğum Tarihi:1981 Doğum Yeri:Kayseri. İş deneyimi
 Adres: Melikşah Üniversitesi Mevlana mh. Talas / KAYSERİ Telefon: 0532 306 55 47 E-posta:ksedef@meliksah.edu.tr Kanber SEDEF Kişisel Bilgi Milliyet: T.C. Doğum Tarihi:1981 Doğum Yeri:Kayseri İş deneyimi
Adres: Melikşah Üniversitesi Mevlana mh. Talas / KAYSERİ Telefon: 0532 306 55 47 E-posta:ksedef@meliksah.edu.tr Kanber SEDEF Kişisel Bilgi Milliyet: T.C. Doğum Tarihi:1981 Doğum Yeri:Kayseri İş deneyimi
KIRKLARELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİMSEL HAZIRLIK PROGRAMLARI YILLIK EĞİTİM PLANI
 KIRKLARELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİMSEL HAZIRLIK PROGRAMLARI LIK EĞİTİM PLANI (2015-2016 eğitim-öğretim yılından itibaren geçerlidir.) I. ve II. YARI ADI Z/S T U L KREDİ AKTS TEK15001 MATEMATİK
KIRKLARELİ ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ BİLİMSEL HAZIRLIK PROGRAMLARI LIK EĞİTİM PLANI (2015-2016 eğitim-öğretim yılından itibaren geçerlidir.) I. ve II. YARI ADI Z/S T U L KREDİ AKTS TEK15001 MATEMATİK
SERVO MOTOR TAMİRİ PLC TAMİRİ AC/DC SÜRÜCÜ TAMİRİ OPERATÖR PANEL TAMİRİ ENDÜSTRİYEL PC TAMİRİ ELEKTRONİK KART TAMİRİ
 SERVO MOTOR TAMİRİ PLC TAMİRİ AC/DC SÜRÜCÜ TAMİRİ OPERATÖR PANEL TAMİRİ ENDÜSTRİYEL PC TAMİRİ ELEKTRONİK KART TAMİRİ BİZ KİMİZ? Biz Kimiz? SERMOT Endüstriyel Otomasyon San. Tic. A.Ş. alanında uzman kadrosu
SERVO MOTOR TAMİRİ PLC TAMİRİ AC/DC SÜRÜCÜ TAMİRİ OPERATÖR PANEL TAMİRİ ENDÜSTRİYEL PC TAMİRİ ELEKTRONİK KART TAMİRİ BİZ KİMİZ? Biz Kimiz? SERMOT Endüstriyel Otomasyon San. Tic. A.Ş. alanında uzman kadrosu
STP1 +2 FONKSİYON. Step Motor Eğitim Seti. Tamamen mekatronik özel tasarım. Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin
 STP1 Step Motor Eğitim Seti Tamamen mekatronik özel tasarım %100 kendi imalatımız Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin +2 FONKSİYON Konum göstrge cetveli 24V PLC kontrollü lazer pointer
STP1 Step Motor Eğitim Seti Tamamen mekatronik özel tasarım %100 kendi imalatımız Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin +2 FONKSİYON Konum göstrge cetveli 24V PLC kontrollü lazer pointer
FİBER LAZER TEKNOLOJİSİ
 FİBER LAZER TEKNOLOJİSİ ermaksan.com.tr 1 FİBER LAZER TEKNOLOJİSİ FIBERMAK G-FORCE FIBERMAK SL G-FORCE Hızınıza Hız Katacak... 4 2,5-18 m boy seçenekleri 1000-24000 kg yük kapasitesi Eksenel hareketler
FİBER LAZER TEKNOLOJİSİ ermaksan.com.tr 1 FİBER LAZER TEKNOLOJİSİ FIBERMAK G-FORCE FIBERMAK SL G-FORCE Hızınıza Hız Katacak... 4 2,5-18 m boy seçenekleri 1000-24000 kg yük kapasitesi Eksenel hareketler
Omron Sysmac ailesi ile gerçek makina otomasyonu. Nurcan Konak, Mayıs 2012
 Omron Sysmac ailesi ile gerçek makina otomasyonu Nurcan Konak, Mayıs 2012 İçerik Omron Hakkında Sysmac Platfotmuna Genel Bakış Gerçek Bir Uygulama Mercek Altında Omron Şirketleri Endüstriyel Otomasyon
Omron Sysmac ailesi ile gerçek makina otomasyonu Nurcan Konak, Mayıs 2012 İçerik Omron Hakkında Sysmac Platfotmuna Genel Bakış Gerçek Bir Uygulama Mercek Altında Omron Şirketleri Endüstriyel Otomasyon
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI TAŞINABİLİR PEDALLI ELEKTRİK ÜRETME ÜNİTESİ PROJESİ
 TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI TAŞINABİLİR PEDALLI ELEKTRİK ÜRETME ÜNİTESİ PROJESİ ERCİYES ÜNİVERSİTESİ MEKATRONİK VE ENDÜSTRİ MÜHENDİSLİĞİ BÖLÜMÜ Projenin
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI TAŞINABİLİR PEDALLI ELEKTRİK ÜRETME ÜNİTESİ PROJESİ ERCİYES ÜNİVERSİTESİ MEKATRONİK VE ENDÜSTRİ MÜHENDİSLİĞİ BÖLÜMÜ Projenin
Durapack Kullanım Kılavuzu
 Durapack Kullanım Kılavuzu PAKETLEME KANTARI KULLANIM KILAVUZU EL KİTABI DURA MAKİNA OSB. 14 CAD. NO:7 / ÇORUM TEL : +90 364 254 92 22 1 İÇİNDEKİLER A. ÖNSÖZ..2 B. UYGULANAN DİREKTİF VE STANDARTLAR..3
Durapack Kullanım Kılavuzu PAKETLEME KANTARI KULLANIM KILAVUZU EL KİTABI DURA MAKİNA OSB. 14 CAD. NO:7 / ÇORUM TEL : +90 364 254 92 22 1 İÇİNDEKİLER A. ÖNSÖZ..2 B. UYGULANAN DİREKTİF VE STANDARTLAR..3
teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir.
 teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir. irvision, FANUC R-30iA Kontrolörü için bir entegre robot görme
teknoloji dünyası ekipmanlı arayüzün minimize edilmesine yardım etmekte ve robotun küçük çalışma alanlarında çalışmasına olanak vermektedir. irvision, FANUC R-30iA Kontrolörü için bir entegre robot görme
YEKTAMAK Makine ve Mühendislik; YEKTAMAK müşterilerinin ihtiyaçlarının belirlenmesinden projenin teslim edilmesine kadar olan süreçte;
 1 HAKKIMIZDA YEKTAMAK Makine ve Mühendislik; 2013 yılında akademik geçmişe sahip ortaklar tarafından kurulmuş bir firmadır. Yeni kurulmuş olmasına rağmen 35 yıla varan tecrübeye sahip personellerinden
1 HAKKIMIZDA YEKTAMAK Makine ve Mühendislik; 2013 yılında akademik geçmişe sahip ortaklar tarafından kurulmuş bir firmadır. Yeni kurulmuş olmasına rağmen 35 yıla varan tecrübeye sahip personellerinden
MAK1002 STATİK Zorunlu YAD112 YABANCI DİL II (ALMANCA) Zorunlu
 Zorunlu") Mühendislik-Mimarlık Fakültesi Makine Mühendisliği 1. Yarıyıl Dersleri MAT1071 MATEMATİK I Zorunlu 3 2.00 0 6.00 MAK1005 BİLGİSAYAR PROGRAMLAMAYA GİRİŞ Zorunlu 2 0.00 1 4.00 MAK1001 MAKİNE MÜHENDİSLİĞİNE
Mühendislik-Mimarlık Fakültesi Makine Mühendisliği 1. Yarıyıl Dersleri MAT1071 MATEMATİK I Zorunlu 3 2.00 0 6.00 MAK1005 BİLGİSAYAR PROGRAMLAMAYA GİRİŞ Zorunlu 2 0.00 1 4.00 MAK1001 MAKİNE MÜHENDİSLİĞİNE
AKILLI ÜRETİM İÇİN ÇİFT ŞERİTLİ PALET SİSTEMİ TEKNİK GENEL BAKIŞ
 AKILLI ÜRETİM İÇİN ÇİFT ŞERİTLİ PALET SİSTEMİ TEKNİK GENEL BAKIŞ MONTAJ, IŞLEME VE TEST IÇIN Transferler, yerleştirme istasyonları ve durdurucular gibi işlevlerin tümü elektriklidir. IIoT ile kullanıma
AKILLI ÜRETİM İÇİN ÇİFT ŞERİTLİ PALET SİSTEMİ TEKNİK GENEL BAKIŞ MONTAJ, IŞLEME VE TEST IÇIN Transferler, yerleştirme istasyonları ve durdurucular gibi işlevlerin tümü elektriklidir. IIoT ile kullanıma
Makine Mühendisliği Bölümü 2018 Eğitim - Öğretim Planı
 Makine Mühendisliği Bölümü 2018 Eğitim - Öğretim Planı 1. Yarıyıl FIZ1001 Fizik 1 Temel Bilimler 3 0 2 4 5 - MAK1051 Bilgisayar Destekli Teknik Resim Meslek Dersi 2 2 0 3 5 - MAK1061 Temel Bilgisayar Bilimleri
Makine Mühendisliği Bölümü 2018 Eğitim - Öğretim Planı 1. Yarıyıl FIZ1001 Fizik 1 Temel Bilimler 3 0 2 4 5 - MAK1051 Bilgisayar Destekli Teknik Resim Meslek Dersi 2 2 0 3 5 - MAK1061 Temel Bilgisayar Bilimleri
ABKANT SERVO SERVOABKANT.
 DENER MAKİNA SAN. TİC. LTD. ŞTİ. +90 352 321 13 50 +90 352 321 13 53 O.S.B. 8.Cadde No:40-42 38070 Kayseri / TÜRKİYE info@dener.com SERVOABKANT SERVO ABKANT HAKKIMIZDA DENER MAKİNA, yüksek teknoloji ve
DENER MAKİNA SAN. TİC. LTD. ŞTİ. +90 352 321 13 50 +90 352 321 13 53 O.S.B. 8.Cadde No:40-42 38070 Kayseri / TÜRKİYE info@dener.com SERVOABKANT SERVO ABKANT HAKKIMIZDA DENER MAKİNA, yüksek teknoloji ve
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ
 5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol avarol@firat.edu.tr GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
YENİ. Tooldyne Uzmanından takım balans sistemi. RM1059 tr
 YENİ Tooldyne Uzmanından takım balans sistemi RM1059 tr Tooldyne Daha az balanssızlık sayesinde daha iyi işleme kalitesi Yüksek hızda işleme günümüzde metal ve plastiklerin ekonomik şekilde işlenmesi için
YENİ Tooldyne Uzmanından takım balans sistemi RM1059 tr Tooldyne Daha az balanssızlık sayesinde daha iyi işleme kalitesi Yüksek hızda işleme günümüzde metal ve plastiklerin ekonomik şekilde işlenmesi için
ABR 320 SET LCD li Kablosuz Oda Termostat Kontrolleri
 ABR 320 SET LCD li Kablosuz Oda Termostat Kontrolleri Sadece ısıtma ve sadece soğutma ayarı ON/OFF Kontrol Pil DC 3 V (2 1,5V AA Alkaline pil) Alıcı AC 250 V-10A (SPDT) Kullanım ABR 320 SET oda termostatları
ABR 320 SET LCD li Kablosuz Oda Termostat Kontrolleri Sadece ısıtma ve sadece soğutma ayarı ON/OFF Kontrol Pil DC 3 V (2 1,5V AA Alkaline pil) Alıcı AC 250 V-10A (SPDT) Kullanım ABR 320 SET oda termostatları
Profesyonel, verimli, yenilikçi çözümler...
 www.mekatromuhendislik.com.tr Profesyonel, verimli, yenilikçi çözümler... www.mekatromuhendislik.com.tr çözüm üretiyoruz... Hakkımızda 2012 yılında endüstriyel otomasyon sektöründe yenilikçi ve kaliteli
www.mekatromuhendislik.com.tr Profesyonel, verimli, yenilikçi çözümler... www.mekatromuhendislik.com.tr çözüm üretiyoruz... Hakkımızda 2012 yılında endüstriyel otomasyon sektöründe yenilikçi ve kaliteli
MKT 204 MEKATRONİK YAPI ELEMANLARI
 MKT 204 MEKATRONİK YAPI ELEMANLARI 2013-2014 Bahar Yarıyılı Kocaeli Üniversitesi Mühendislik Fakültesi Mekatronik Mühendisliği Bölümü Yrd. Doç. Dr. Egemen Avcu Makine Bir veya birçok fonksiyonu (güç iletme,
MKT 204 MEKATRONİK YAPI ELEMANLARI 2013-2014 Bahar Yarıyılı Kocaeli Üniversitesi Mühendislik Fakültesi Mekatronik Mühendisliği Bölümü Yrd. Doç. Dr. Egemen Avcu Makine Bir veya birçok fonksiyonu (güç iletme,
SKF bu yolda ilerlerken bünyesinde servis-yağlama-sızdırmazlık platformlarınıda geliştirmiş ve bu platformlarda çalışmalarını devam ettirmektedir.
 Günümüzde teknolojinin gelişimi ile birlikte endüstriyel işletmelerin eskiye oranla satınaldıkları ürünlerden beklentileride artmış ve beklentilerini en üst seviyede karşılayabilecek ürünleri tercih etmelerinin
Günümüzde teknolojinin gelişimi ile birlikte endüstriyel işletmelerin eskiye oranla satınaldıkları ürünlerden beklentileride artmış ve beklentilerini en üst seviyede karşılayabilecek ürünleri tercih etmelerinin
TANITIM KATALOĞU SİZ İSTEYİN BİZ YAPALIM
 TANITIM KATALOĞU SİZ İSTEYİN BİZ YAPALIM 2 HAKKIMIZDA Ankara Ostim OSB de 1990 yılında kurulan Yeter Makina, talaşlı imalat amacıyla kurulduktan kısa bir süre sonra parça üretimi ve mekanik sistem üretimine
TANITIM KATALOĞU SİZ İSTEYİN BİZ YAPALIM 2 HAKKIMIZDA Ankara Ostim OSB de 1990 yılında kurulan Yeter Makina, talaşlı imalat amacıyla kurulduktan kısa bir süre sonra parça üretimi ve mekanik sistem üretimine
Elektronik Paketleme makinesi tam otomatik besleme ünitesiyle birlikte, yüksek üretim
 TEKNOPAC 300 Elektronik Paketleme makinesi tam otomatik besleme ünitesiyle birlikte, yüksek üretim Kapasitesi için, düzgün ürünleri sarmak üzere tasarlanmıştır. Konsol tasarımı, modüler yapısı, yüksek
TEKNOPAC 300 Elektronik Paketleme makinesi tam otomatik besleme ünitesiyle birlikte, yüksek üretim Kapasitesi için, düzgün ürünleri sarmak üzere tasarlanmıştır. Konsol tasarımı, modüler yapısı, yüksek
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER. Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul
 OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
OTONOM ÇĐM BĐÇME MAKĐNESĐ GELĐŞTĐRĐLMESĐ DEVELOPING OF AUTONOMOUS LAWN MOVER Danışman: Prof.Dr. Koray TUNÇALP, Marmara Üniversitesi Đstanbul Cihan ÇATALTEPE, Marmara Üniversitesi-Mekatronik Öğrt.4.Sınıf
CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI
 CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI Kuruluş Amacı Celal Bayar Üniversitesi Elektrik-Elektronik Mühendisliği Kontrol
CELAL BAYAR ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ KONTROL VE OTOMASYON LABORATUVARI Kuruluş Amacı Celal Bayar Üniversitesi Elektrik-Elektronik Mühendisliği Kontrol
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU
 5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol avarol@firat.edu.tr Abdulkadir Şengür ksengur@firat.edu.tr Engin Avcı enginavci@firat.edu.tr Özet Bu benzetim projesinde seramiklere
SRV2 +2 FONKSİYON. Servo Motor Eğitim Seti. Tamamen mekatronik özel tasarım. Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin
 SRV2 Servo Motor Eğitim Seti Tamamen mekatronik özel tasarım Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin %100 kendi imalatımız +2 FONKSİYON Pnömatik 2.eksen Vakumlu Parça Tutma Eğitim Seti
SRV2 Servo Motor Eğitim Seti Tamamen mekatronik özel tasarım Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin %100 kendi imalatımız +2 FONKSİYON Pnömatik 2.eksen Vakumlu Parça Tutma Eğitim Seti
BİLGİSAYAR BİLİMİ DERSİ ROBOT PROGRAMLAMA ÜNİTESİ
 BİLGİSAYAR BİLİMİ DERSİ ROBOT PROGRAMLAMA ÜNİTESİ 1-Robot nedir? 2-Robot projeleri için tavsiyeler 3-Robot Türleri ve Çeşitleri 4-Eğitsel robotlar 5-Robot tasarımı için gerekli bileşenler ROBOT NEDİR?
BİLGİSAYAR BİLİMİ DERSİ ROBOT PROGRAMLAMA ÜNİTESİ 1-Robot nedir? 2-Robot projeleri için tavsiyeler 3-Robot Türleri ve Çeşitleri 4-Eğitsel robotlar 5-Robot tasarımı için gerekli bileşenler ROBOT NEDİR?
RedoMayer Makina ve Otomasyon
 RedoMayer Makina ve Otomasyon >Robotik Sistemler >PLC ve modülleri >Operatör Panelleri >Servo Motor ve Sürücüleri >Redüktörler >Encoderler www.redomayer.com RedoMayer Makina ve Otomasyon, 20 yılı aşan
RedoMayer Makina ve Otomasyon >Robotik Sistemler >PLC ve modülleri >Operatör Panelleri >Servo Motor ve Sürücüleri >Redüktörler >Encoderler www.redomayer.com RedoMayer Makina ve Otomasyon, 20 yılı aşan
MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ)
") T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ ALANI ANKARA 2007 AMAÇ ÖĞRENME FAALİYETİ -13 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ ALANI ANKARA 2007 AMAÇ ÖĞRENME FAALİYETİ -13 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
HT 150 SET. LCD li Kablosuz Oda Termostatı Kontrolleri. Kullanım
 HT 150 SET LCD li Kablosuz Oda Termostatı Kontrolleri HT 150 SET kablosuz oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. - Hassas
HT 150 SET LCD li Kablosuz Oda Termostatı Kontrolleri HT 150 SET kablosuz oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. - Hassas
DÖRT BACAKLI ROBOT TASARIMI
 DÖRT BACAKLI ROBOT TASARIMI Yücel YILMAZ, yilmazyucel@yandex.com Sakarya Üniversitesi,54000, Sakarya İsmet ÜNALLI, ismetunalli.26@hotmail.com Sakarya Üniversitesi, 54000, Sakarya Muhammed ÖZCAN, muhammedozcan07@hotmail.com
DÖRT BACAKLI ROBOT TASARIMI Yücel YILMAZ, yilmazyucel@yandex.com Sakarya Üniversitesi,54000, Sakarya İsmet ÜNALLI, ismetunalli.26@hotmail.com Sakarya Üniversitesi, 54000, Sakarya Muhammed ÖZCAN, muhammedozcan07@hotmail.com
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MESLEK YÜKSEKOKULU 2013-2014 EĞİTİM-ÖĞRETİM YILI BAHAR YARIYILI YARIYIL İÇİ SINAV PROGRAMI
 11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 07.04.14 Pazartesi 10.30 D3-D4 1 Matematik II 07.04.14 Pazartesi 15.30 OD1 1 Mukavemet 08.04.14 Salı 15.30 OD1 1 Beton Teknolojisi 09.04.14 Çarşamba
11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 07.04.14 Pazartesi 10.30 D3-D4 1 Matematik II 07.04.14 Pazartesi 15.30 OD1 1 Mukavemet 08.04.14 Salı 15.30 OD1 1 Beton Teknolojisi 09.04.14 Çarşamba
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ELEKTROMANYETİK FIRLATMA SİSTEMİ ERCİYES ÜNİVERSİTESİ
 TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ELEKTROMANYETİK FIRLATMA SİSTEMİ ERCİYES ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Elektrik Teknolojileri
TÜBİTAK 2209-A ÜNİVERSİTE ÖĞRENCİLERİ YURT İÇİ ARAŞTIRMA PROJELERİ DESTEK PROGRAMI ELEKTROMANYETİK FIRLATMA SİSTEMİ ERCİYES ÜNİVERSİTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ Projenin Tematik Alanı Elektrik Teknolojileri
HT 250 SET. LCD li Kablosuz Oda Termostatı Kontrolleri. Kullanım
 HT 250 SET LCD li Kablosuz Oda Termostatı Kontrolleri HT 250 SET kablosuz oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. - Hassas
HT 250 SET LCD li Kablosuz Oda Termostatı Kontrolleri HT 250 SET kablosuz oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. - Hassas
BĐLGĐSAYAR KONTROLLU CNC SĐSTEMĐ PC CONTROLLED CNC SYSTEM
 BĐLGĐSAYAR KONTROLLU CNC SĐSTEMĐ PC CONTROLLED CNC SYSTEM L. Özlem KARACA, Taner AKKAN, Tolga OLCAY, Hakan ÇELĐK, Recep Can BAŞKURT, Đsmail YALÇINER, Mehmet BAYSARI Dokuz Eylül Üniversitesi Đzmir Meslek
BĐLGĐSAYAR KONTROLLU CNC SĐSTEMĐ PC CONTROLLED CNC SYSTEM L. Özlem KARACA, Taner AKKAN, Tolga OLCAY, Hakan ÇELĐK, Recep Can BAŞKURT, Đsmail YALÇINER, Mehmet BAYSARI Dokuz Eylül Üniversitesi Đzmir Meslek
İKLİM. KALIP ve İMALAT
 İKLİM KALIP ve İMALAT İKLİM Kalıp ve İmalat, uzman teknik kadro ve üstün kalite anlayışı ile otomotiv ve beyaz eşya sanayisi başta olmak üzere diğer sanayilere destek veren, sürekli ve kaliteli hizmet
İKLİM KALIP ve İMALAT İKLİM Kalıp ve İmalat, uzman teknik kadro ve üstün kalite anlayışı ile otomotiv ve beyaz eşya sanayisi başta olmak üzere diğer sanayilere destek veren, sürekli ve kaliteli hizmet
kabinler Rack Wall wall rack kabinler
 7 kabinler Wall Rack www.gunko.com.tr 118 119 Wall Rack Wall Rack serisi kabinetler ofis uygulamaların da kullanılacak şekilde estetik görünümlü, yüksek kalitede tasarımı ve imalatı sayesinde tüm aktif
7 kabinler Wall Rack www.gunko.com.tr 118 119 Wall Rack Wall Rack serisi kabinetler ofis uygulamaların da kullanılacak şekilde estetik görünümlü, yüksek kalitede tasarımı ve imalatı sayesinde tüm aktif
ABKANT SERVO SERVOABKANT.
 DENER MAKİNA SAN. TİC. LTD. ŞTİ. +90 352 321 13 50 +90 352 321 13 53 O.S.B. 8.Cadde No:40-42 38070 Kayseri / TÜRKİYE info@dener.com SERVOABKANT SERVO ABKANT HAKKIMIZDA DENER MAKİNA, yüksek teknoloji ve
DENER MAKİNA SAN. TİC. LTD. ŞTİ. +90 352 321 13 50 +90 352 321 13 53 O.S.B. 8.Cadde No:40-42 38070 Kayseri / TÜRKİYE info@dener.com SERVOABKANT SERVO ABKANT HAKKIMIZDA DENER MAKİNA, yüksek teknoloji ve
MEKANİZMA TEKNİĞİ (1. Hafta)
") Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
Giriş MEKANİZMA TEKNİĞİ (1. Hafta) Günlük yaşantımızda çok sayıda makina kullanmaktayız. Bu makinalar birçok yönüyle hayatımızı kolaylaştırmakta, yaşam kalitemizi artırmaktadır. Zaman geçtikce makinalar
(Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ
 SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ. DENEY SORUMLUSU Arş.Gör. Sertaç SAVAŞ") T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
T.C. ERCİYES ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK LABORATUVARI 1 (Mekanik Sistemlerde PID Kontrol Uygulaması - 1) SÜSPANSİYON SİSTEMLERİNİN PID İLE KONTROLÜ DENEY
ÇOK DİSİPLİNLİ TASARIM PROJESİ YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ
 ÇOK DİSİPLİNLİ TASARIM PROJESİ YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ Hazırlayan: Dr.Serkan KURT AMAÇ Çok disiplinli tasarım projesi ile öğrencilerimizin Fakültemizde yer alan farklı
ÇOK DİSİPLİNLİ TASARIM PROJESİ YILDIZ TEKNİK ÜNİVERSİTESİ ELEKTRİK-ELEKTRONİK FAKÜLTESİ Hazırlayan: Dr.Serkan KURT AMAÇ Çok disiplinli tasarım projesi ile öğrencilerimizin Fakültemizde yer alan farklı
BTB Proje Yönetimi ve Mühendislik Ltd. Şti.
 ŞİRKET SUNUMU SUNUM PLANI Hakkımızda BTB Ekibi ve Çözüm Ortakları Kalite Anlayışımız Faaliyet Alanlarımız Hizmetlerimiz Altyapılarımız Geliştirilen Birim ve Sistem Örnekleri İletişim Hakkımızda 2013 yılında
ŞİRKET SUNUMU SUNUM PLANI Hakkımızda BTB Ekibi ve Çözüm Ortakları Kalite Anlayışımız Faaliyet Alanlarımız Hizmetlerimiz Altyapılarımız Geliştirilen Birim ve Sistem Örnekleri İletişim Hakkımızda 2013 yılında
MAKAS HİDROLİK HİDROLİKMAKAS.
 DENER MAKİNA SAN. TİC. LTD. ŞTİ. +90 352 321 13 50 +90 352 321 13 53 O.S.B. 8.Cadde No:40-42 38070 Kayseri / TÜRKİYE info@dener.com HİDROLİKMAKAS HİDROLİK MAKAS HAKKIMIZDA DENER MAKİNA, yüksek teknoloji
DENER MAKİNA SAN. TİC. LTD. ŞTİ. +90 352 321 13 50 +90 352 321 13 53 O.S.B. 8.Cadde No:40-42 38070 Kayseri / TÜRKİYE info@dener.com HİDROLİKMAKAS HİDROLİK MAKAS HAKKIMIZDA DENER MAKİNA, yüksek teknoloji
HT 200. LCD li Oda Termostat Kontrolleri. Kullanım
 HT 200 LCD li Oda Termostat Kontrolleri HT 200 kablolu oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. - Hassas sıcaklık ölçme
HT 200 LCD li Oda Termostat Kontrolleri HT 200 kablolu oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. - Hassas sıcaklık ölçme
SEMİ OTOMASYON AKILLI ÇÖZÜMLER. Sınırsız Yenilikler
 SEMİ OTOMASYON AKILLI ÇÖZÜMLER Sınırsız Yenilikler 2 Semi Ltd Şti Şirketimiz 1996 yılında kurulmuş olup, kurulduğu tarihten itibaren makine ve fabrika otomasyonu konusunda hizmetine devam etmektedir. Ağırlıklı
SEMİ OTOMASYON AKILLI ÇÖZÜMLER Sınırsız Yenilikler 2 Semi Ltd Şti Şirketimiz 1996 yılında kurulmuş olup, kurulduğu tarihten itibaren makine ve fabrika otomasyonu konusunda hizmetine devam etmektedir. Ağırlıklı
Durafan Kullanım Kılavuzu
 Durafan Kullanım Kılavuzu ASPİRATÖR KULLANIM KILAVUZU EL KİTABI Kerep Çubuk DURA MAKİNA OSB. 14 CAD. NO:7 / ÇORUM TEL : +90 364 254 92 22 1 İÇİNDEKİLER A. ÖNSÖZ..2 B. UYGULANAN DİREKTİF VE STANDARTLAR..3
Durafan Kullanım Kılavuzu ASPİRATÖR KULLANIM KILAVUZU EL KİTABI Kerep Çubuk DURA MAKİNA OSB. 14 CAD. NO:7 / ÇORUM TEL : +90 364 254 92 22 1 İÇİNDEKİLER A. ÖNSÖZ..2 B. UYGULANAN DİREKTİF VE STANDARTLAR..3
SCARA ROBOT TASARIMI (07B-600 SCARA)
") T.C. DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ SCARA ROBOT TASARIMI (07B-600 SCARA) BİTİRME PROJESİ Tarık KURU 2001485057 Mehmet ÖZKARAKOÇ 2002485044 Projeyi Yöneten Prof.
T.C. DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ SCARA ROBOT TASARIMI (07B-600 SCARA) BİTİRME PROJESİ Tarık KURU 2001485057 Mehmet ÖZKARAKOÇ 2002485044 Projeyi Yöneten Prof.
IDC101 Bağlantı Şeması
 IDC101 Bağlantı Şeması 1 Şubat 2018 IDC101 Kontrol Panosuna ait kullanım kitapçığı okunduktan sonra elektriksel bağlantıların nasıl yapılacağı ile ilgili bilgiler bu dokümanda yer almaktadır. Her bir elektriksel
IDC101 Bağlantı Şeması 1 Şubat 2018 IDC101 Kontrol Panosuna ait kullanım kitapçığı okunduktan sonra elektriksel bağlantıların nasıl yapılacağı ile ilgili bilgiler bu dokümanda yer almaktadır. Her bir elektriksel
www.muhendisiz.net MEKATRONĐK NEDĐR? Mekatronik Sistemlerin Genel Şeması
 www.muhendisiz.net MEKATRONĐK NEDĐR? Mekatronik; makine, elektrik, elektronik, kontrol sistemleri teknolojisi programları ile bilgisayar yazılım bilim dallarının bir bütünlük içinde algılanmasına dayanan
www.muhendisiz.net MEKATRONĐK NEDĐR? Mekatronik; makine, elektrik, elektronik, kontrol sistemleri teknolojisi programları ile bilgisayar yazılım bilim dallarının bir bütünlük içinde algılanmasına dayanan
BOZKURT MAKİNA. Çivi Üretim Makinaları, Yedek Parça ve Ekipmanları BF1 MODEL ÇİVİ ÜRETİM MAKİNASI
 BOZKURT MAKİNA Çivi Üretim Makinaları, Yedek Parça ve Ekipmanları BF1 MODEL ÇİVİ ÜRETİM MAKİNASI ÇİVİ ÇAPI ÇİVİ BOYU KAPASİTE MOTOR GÜCÜ MAXİMUM ÇİVİ KAFA ÖLÇÜSÜ MAKİNA PARKURU ÖLÇÜLERİ (AxBxC) AĞIRLIK
BOZKURT MAKİNA Çivi Üretim Makinaları, Yedek Parça ve Ekipmanları BF1 MODEL ÇİVİ ÜRETİM MAKİNASI ÇİVİ ÇAPI ÇİVİ BOYU KAPASİTE MOTOR GÜCÜ MAXİMUM ÇİVİ KAFA ÖLÇÜSÜ MAKİNA PARKURU ÖLÇÜLERİ (AxBxC) AĞIRLIK
5.36. FINDIK SAVURMA OTOMASYONU
 5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
info@fnss.com.tr www.fnss.com.tr FNSS 2009
 HİZMETE ÖZEL 1 Faaliyet Alanları Tasarım, Geliştirme ve Üretim Paletli Zırhlı Muharebe Araçları Lastik Tekerlekli Zırhlı Araçlar Silah Sistemleri Zırhlı Araç Modernizasyonu, Bakımı ve Onarımı Entegre Lojistik
HİZMETE ÖZEL 1 Faaliyet Alanları Tasarım, Geliştirme ve Üretim Paletli Zırhlı Muharebe Araçları Lastik Tekerlekli Zırhlı Araçlar Silah Sistemleri Zırhlı Araç Modernizasyonu, Bakımı ve Onarımı Entegre Lojistik
HT 300 SET LCD li Kablosuz Oda Termostatı Kontrolleri
 HT 300 SET LCD li Kablosuz Oda Termostatı Kontrolleri HT 300 SET kablosuz oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. Dokunmatik
HT 300 SET LCD li Kablosuz Oda Termostatı Kontrolleri HT 300 SET kablosuz oda termostatıdır. Kullanıcı oda termostatını ihtiyacı doğrultusunda ayarlayıp daha konforlu ve ekonomik bir ısınma sağlar. Dokunmatik
ÜÇ EKSENLİ MASA TİPİ CNC FREZE TEZGAHI TASARIM VE PROTOTİPİ. Cem DOĞAN, Kerim ÇETĠNKAYA
 ÜÇ EKSENLİ MASA TİPİ CNC FREZE TEZGAHI TASARIM VE PROTOTİPİ Cem DOĞAN, Kerim ÇETĠNKAYA *Karabük Üniversitesi, Teknik Eğitim Fakültesi, Makine Eğitimi Bölümü, Karabük Özet Günümüzde Teknolojinin gelişmesi
ÜÇ EKSENLİ MASA TİPİ CNC FREZE TEZGAHI TASARIM VE PROTOTİPİ Cem DOĞAN, Kerim ÇETĠNKAYA *Karabük Üniversitesi, Teknik Eğitim Fakültesi, Makine Eğitimi Bölümü, Karabük Özet Günümüzde Teknolojinin gelişmesi
5.13. SONDAJ MAKİNESİ PROJESİ
 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL avarol@firat.edu.tr 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
PLC1 3 EKSENLİ. PLC Eğitim Seti. Tamamen mekatronik özel tasarım. Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin. %100 kendi imalatımız
 PLC1 PLC Eğitim Seti %100 kendi imalatımız Tamamen mekatronik özel tasarım Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin MODELLER Standart Operatör Panelli 3 EKSENLİ Magazin Baskı Baskı sürücü
PLC1 PLC Eğitim Seti %100 kendi imalatımız Tamamen mekatronik özel tasarım Pratik Becerileri kazanmak ve Proje Odaklı Uzmanlık İçin MODELLER Standart Operatör Panelli 3 EKSENLİ Magazin Baskı Baskı sürücü
Üniversite-Sanayi İşbirliği İle Firma Bünyesinde İntern Mühendislerle Proje Grupları Oluşturarak Ar-Ge Faaliyetlerinin Gerçekleştirilmesi
 AR-GE MERKEZLERİ İYİ UYGULAMA ÖRNEKLERİ PAYLAŞIM TOPLANTISI AR-GE YÖNETİMİ Üniversite-Sanayi İşbirliği İle Firma Bünyesinde İntern Mühendislerle Proje Grupları Oluşturarak Ar-Ge Faaliyetlerinin Gerçekleştirilmesi
AR-GE MERKEZLERİ İYİ UYGULAMA ÖRNEKLERİ PAYLAŞIM TOPLANTISI AR-GE YÖNETİMİ Üniversite-Sanayi İşbirliği İle Firma Bünyesinde İntern Mühendislerle Proje Grupları Oluşturarak Ar-Ge Faaliyetlerinin Gerçekleştirilmesi
VİNÇLER VE KALDIRMA MAKİNALARI
 VİNÇLER VE KALDIRMA MAKİNALARI 1991 yılında İstanbul'da kurulan şirketimiz özellikle elektromekanik techizatlar, vinçler, kaldırma ve basınçlı hava sistemleri konusunda uzmanlaşmıştır. ERA, ağır endüstrinin
VİNÇLER VE KALDIRMA MAKİNALARI 1991 yılında İstanbul'da kurulan şirketimiz özellikle elektromekanik techizatlar, vinçler, kaldırma ve basınçlı hava sistemleri konusunda uzmanlaşmıştır. ERA, ağır endüstrinin
AKE MİKSER KONTROL KARTI TEK HIZLI KULLANIM KILAVUZU
 AKE.324.002.01.01 MİKSER KONTROL KARTI TEK HIZLI KULLANIM KILAVUZU AKE.324.002.04.01 MİKSER KONTROL KARTI TEK HIZLI KULLANIM KILAVUZU 1 1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI AKE.324.002.04.01 MİKSER
AKE.324.002.01.01 MİKSER KONTROL KARTI TEK HIZLI KULLANIM KILAVUZU AKE.324.002.04.01 MİKSER KONTROL KARTI TEK HIZLI KULLANIM KILAVUZU 1 1.CİHAZ ÖLÇÜLERİ 2.CİHAZ BAĞLANTI ŞEMASI AKE.324.002.04.01 MİKSER
Clever made! Ev otomasyonu için etkin çözüm. Merkezi,taşınabilir ve güvenli. Birlikte daha kolay.
 Clever made! Ev otomasyonu için etkin çözüm. Merkezi,taşınabilir ve güvenli. Birlikte daha kolay. B-Tronic Motorlar Çift-yönlü alıcı entegreli motorlar B01 Serisi Çift yönlü kablosuz alıcı ve hafıza fonksiyonu
Clever made! Ev otomasyonu için etkin çözüm. Merkezi,taşınabilir ve güvenli. Birlikte daha kolay. B-Tronic Motorlar Çift-yönlü alıcı entegreli motorlar B01 Serisi Çift yönlü kablosuz alıcı ve hafıza fonksiyonu
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU
 5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
CNC ABKANT PRES ULTIMATE SERİSİ STANDART ÖZELLİKLER. Kürsü tip Ergonomik Ayak pedalı. Arka Dayama Dili. Alt Dar Tabla CYBELEC TOUCH12 2D
 CNC ABKANT PRES ULTIMATE SERİSİ STANDART ÖZELLİKLER CYBELEC TOUCH12 2D 12 Dokunmatik Renkli Ekran. Otomatik büküm sekans ile 2D Grafik profil oluşturma Büküm sekansları ve programları hafızaya alınabilir.
CNC ABKANT PRES ULTIMATE SERİSİ STANDART ÖZELLİKLER CYBELEC TOUCH12 2D 12 Dokunmatik Renkli Ekran. Otomatik büküm sekans ile 2D Grafik profil oluşturma Büküm sekansları ve programları hafızaya alınabilir.
AFYON KOCATEPE ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ MAKİNE MÜHENDİSLİĞİ ANABİLİM DALI BAŞKANLIĞI YÜKSEK LİSANS PROGRAMI
 YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL ADI KREDİSİ* MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL ADI KREDİSİ* MKM-5502 UZMANLIK
YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL ADI KREDİSİ* MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL ADI KREDİSİ* MKM-5502 UZMANLIK
UR3 Sayesinde 2 Kişilik İş, Tek Kişiyle Kolayca Tamamlanabilecek
 Yardımcı robotların Danimarkalı öncüsü Universal Robots, hafif montaj işleri ve otomatikleştirilmiş tezgah üstü görevler için ürettiği yeni ve küçük robotu UR3 ün tanıtımı 13 Nisan da Hannover Messe de
Yardımcı robotların Danimarkalı öncüsü Universal Robots, hafif montaj işleri ve otomatikleştirilmiş tezgah üstü görevler için ürettiği yeni ve küçük robotu UR3 ün tanıtımı 13 Nisan da Hannover Messe de
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MESLEK YÜKSEKOKULU 2013-2014 EĞİTİM-ÖĞRETİM YILI BAHAR YARIYILI BÜTÜNLEME SINAV PROGRAMI
 11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 09.06.14 Pazartesi 12.00 901 1 Beden Eğitimi ve Spor 10.06.14 Salı 10.30 310 1 Temel Bilgi Teknolojisi Kullanımı 10.06.14 Salı 12.00 D1-D2 1 Matematik
11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 09.06.14 Pazartesi 12.00 901 1 Beden Eğitimi ve Spor 10.06.14 Salı 10.30 310 1 Temel Bilgi Teknolojisi Kullanımı 10.06.14 Salı 12.00 D1-D2 1 Matematik
BİG BAG DOLUM SİSTEMLERİ
 BİG BAG DOLUM SİSTEMLERİ Big-Bag dolum makinesi, toz ve granül malzemelerin silolardan big-bag torbalarına, PLC kontrolü ile doldurulması işlemini gerçekleştirir. İsteğe bağlı olarak doldurma işlemi 200-1500
BİG BAG DOLUM SİSTEMLERİ Big-Bag dolum makinesi, toz ve granül malzemelerin silolardan big-bag torbalarına, PLC kontrolü ile doldurulması işlemini gerçekleştirir. İsteğe bağlı olarak doldurma işlemi 200-1500
1. Ürün Bilgisi. Şekil 1: AVS Pano Dış Görünümü. EPC-6 Kontrol Paneli. Manuel / Otomatik / Kapalı / Seçici / Çalıştırma Butonu
 AVS Kontrol Panosu 1. Ürün Bilgisi AVS; değişken hızlı kontrol sayesinde yüksek enerji tasarrufu sağlayan, 4.3 TFT dokunmatik ekrana sahip özel tasarlanmış PLC ve röle modülünden oluşan, bir pompa kontrol
AVS Kontrol Panosu 1. Ürün Bilgisi AVS; değişken hızlı kontrol sayesinde yüksek enerji tasarrufu sağlayan, 4.3 TFT dokunmatik ekrana sahip özel tasarlanmış PLC ve röle modülünden oluşan, bir pompa kontrol
SOLENOİD KONTROL VANASI
 SOLENOİD KONTROL VANASI TARIMSAL SULAMA ENDÜSTRİYEL ALANLAR İÇME SUYU Su Sistemleri Su Sistemleri İzmir de 2004 Yılında Tayfun Yazaroğlu tarafından kurulan Tayfur Su Sistemleri, 207 yılından itibaren Tayfur
SOLENOİD KONTROL VANASI TARIMSAL SULAMA ENDÜSTRİYEL ALANLAR İÇME SUYU Su Sistemleri Su Sistemleri İzmir de 2004 Yılında Tayfun Yazaroğlu tarafından kurulan Tayfur Su Sistemleri, 207 yılından itibaren Tayfur
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ
 SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
SABİT MIKNATISLI MOTORLAR ve SÜRÜCÜLERİ 1-Step Motorlar - Sabit mıknatıslı Step Motorlar 2- Sorvo motorlar - Sabit mıknatıslı Servo motorlar 1- STEP (ADIM) MOTOR NEDİR Açısal konumu adımlar halinde değiştiren,
S - PLAS PLASTİK MAKİNA OTOMASYON BERABER, GELECEĞE...
 BERABER, GEECEĞE... MERKE OFIS Ekinoba Mah. ürriyet Cad. Cemre Sok. Tech Mimaroba Sitesi A Blok Kat:3 D.No:12 Büyükçekmece / İSTANBU Tel : 0090 545 532 3422 Email : info@s-plas.com GEBE OFİS Bayramoglu
BERABER, GEECEĞE... MERKE OFIS Ekinoba Mah. ürriyet Cad. Cemre Sok. Tech Mimaroba Sitesi A Blok Kat:3 D.No:12 Büyükçekmece / İSTANBU Tel : 0090 545 532 3422 Email : info@s-plas.com GEBE OFİS Bayramoglu
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
LBSG 36 KOMPLE SF6 GAZ YALITIMLI METAL MAHVAZALI MODÜLER HÜCRELER (RMU)
") LBSG 36 KOMPLE SF6 GAZ YALITIMLI METAL MAHVAZALI MODÜLER HÜCRELER (RMU) DİNAMİZM / SÜREKLİLİK / PERFORMANS / TECRÜBE ULUSOY ELEKTRİK A.Ş. 1985 yılında bir mühendislik şirketi olarak kurulmuştur. Ulusoy
LBSG 36 KOMPLE SF6 GAZ YALITIMLI METAL MAHVAZALI MODÜLER HÜCRELER (RMU) DİNAMİZM / SÜREKLİLİK / PERFORMANS / TECRÜBE ULUSOY ELEKTRİK A.Ş. 1985 yılında bir mühendislik şirketi olarak kurulmuştur. Ulusoy
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ :
 SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
SSM - 4 ORANSAL SERVOMOTOR SSM 4 TANITIM BİLGİLERİ : SSM Serisi servo motorlar Era Ltd.Şti. ticari ürünüdür. Saha da çalışması için basit ve sorunsuz bir yapıya sahiptir. 4 Pinli bağlantı soketi ile, kolay
FC 2048 KURULUM VE KULLANIM KILAVUZU
 SİSTEMİ MEYDANA GETİREN MODÜLLER Sistem üç ana modülden oluşur Duvar Hava Çıkış Modülü,Kapı Hava Giriş Modülü,Sistem Kontrol Modülü. 1. Kapı Hava Giriş Modülü Hava giriş modülü aşağıdaki parçalardan oluşur(resim1).
SİSTEMİ MEYDANA GETİREN MODÜLLER Sistem üç ana modülden oluşur Duvar Hava Çıkış Modülü,Kapı Hava Giriş Modülü,Sistem Kontrol Modülü. 1. Kapı Hava Giriş Modülü Hava giriş modülü aşağıdaki parçalardan oluşur(resim1).
ASKILI KONVEYÖRLER. Askılı Konveyör Detayı. Askılı Konveyör Uygulaması
 ASKILI KONVEYÖRLER Askılı Konveyör Uygulaması Askılı Konveyör Detayı Genellikle malzeme, yarı mamül ve mamüllerin boyama, kurutma ve soğutma proseslerinde kullanılmaktadırlar. Montaj hatları için tasarlanan
ASKILI KONVEYÖRLER Askılı Konveyör Uygulaması Askılı Konveyör Detayı Genellikle malzeme, yarı mamül ve mamüllerin boyama, kurutma ve soğutma proseslerinde kullanılmaktadırlar. Montaj hatları için tasarlanan
5.33. OTOMATİK PARÇA DELME OTOMASYONU
 5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL avarol@firat.edu.tr GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
AFYON KOCATEPE ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ MAKİNE MÜHENDİSLİĞİ ANABİLİM DALI BAŞKANLIĞI YÜKSEK LİSANS PROGRAMI
 YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL MKM-5502 UZMANLIK ALAN DERSİ Z 8 0 8
YÜKSEK LİSANS PROGRAMI BİRİNCİ YIL BİRİNCİ YARIYIL MKM-5501 UZMANLIK ALAN DERSİ Z 8 0 8 0 9 MKM-5601 TEZ HAZIRLIK ÇALIŞMASI Z 0 1 1 0 1 20 1 21 12 30 İKİNCİ YARIYIL MKM-5502 UZMANLIK ALAN DERSİ Z 8 0 8
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MESLEK YÜKSEKOKULU 2013-2014 EĞİTİM-ÖĞRETİM YILI BAHAR YARIYILI YARIYIL SONU SINAV PROGRAMI
 11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 22.05.14 Perşembe 10.30 D3-D4 1 Matematik II 23.05.14 Cuma 13.30 901 1 Beden Eğitimi ve Spor 23.05.14 Cuma 15.30 110-112 1 Beton Teknolojisi 27.05.14
11-İNŞAAT TEKNOLOJİSİ PROGRAMI 1. SINIF SINAV PROGRAMI 22.05.14 Perşembe 10.30 D3-D4 1 Matematik II 23.05.14 Cuma 13.30 901 1 Beden Eğitimi ve Spor 23.05.14 Cuma 15.30 110-112 1 Beton Teknolojisi 27.05.14
Y TİPİ AYDINLATMA DİREĞİ TEKNİK ŞARTNAME
 Y TİPİ AYDINLATMA DİREĞİ TEKNİK ŞARTNAME 10metre ÇİFTLİ DEKORATİF AYDINLATMA DİREĞİ Direk Ana Gövde : Direk gövdesi kullanılan Ø114*3mm Ø139*4mm, Ø168*4mm çelik (S 235 JR) kalite borulardan imal edilecektir.
Y TİPİ AYDINLATMA DİREĞİ TEKNİK ŞARTNAME 10metre ÇİFTLİ DEKORATİF AYDINLATMA DİREĞİ Direk Ana Gövde : Direk gövdesi kullanılan Ø114*3mm Ø139*4mm, Ø168*4mm çelik (S 235 JR) kalite borulardan imal edilecektir.
Bobin Gövdesi. Flanşı Tork Ayar Vidası. Balata. Dişli. Montaj Vidası
 Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,