5.15. VİNÇ BENZETİM PROJESİ
|
|
|
- Deniz Şaşmaz
- 10 yıl önce
- İzleme sayısı:
Transkript
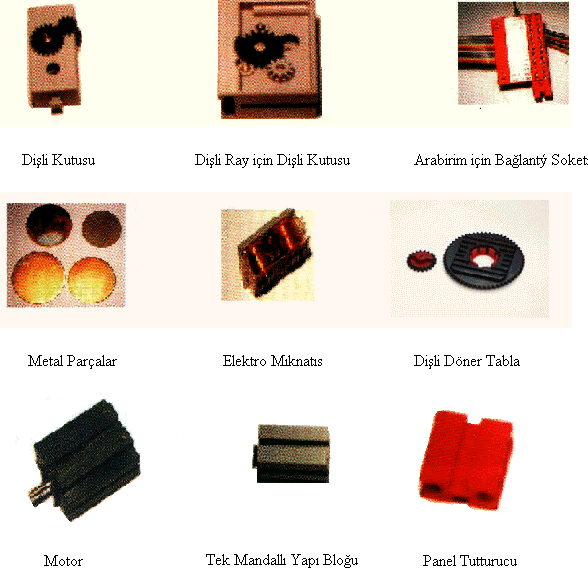
1 5.15. VİNÇ BENZETİM PROJESİ Prof. Dr. Asaf VAROL 1. PROJE KONUSU Metal parçaların bant üzerinden elektromıknatıs vasıtasıyla alınarak taģınması ve bir yerde istiflenmesi bu projenin konusunu oluģturmaktadır. 2. PROJENİN AMACI Sanayide kullanılmakta olan bu sistemin küçük bir benzetim projesi yapılmıģtır. Projede tırnakları vasıtasıyla birbirine tutturulabilen küçük lego parçalar kullanılmıģtır. Bu parçalar arasında elektromıknatıs, motorlar, diģliler, yapı blokları vb. malzemeler bulunmaktadır. Robotun çalıģtırılması, bir bilgisayar aracılığı ile uygun bir yazılımla sağlanmaktadır. 3. SİSTEMİN ÇALIŞMASI Metal parçalar, yürüyen bir bant aracılığı ile belirli bir noktaya taģınmaktadır. Metal parçalarının geldiğini fark eden robot kolu malzeme üzerine doğru hareket etmekte ve elektromıknatıstan akım geçirilerek metal parçalarının tutulması sağlanmaktadır. Mıknatısa tutulu metal parçalar, istenilen yere taģınmakta ve orada istiflenmektedir. Özellikle Avrupa da araba çöplüklerindeki hurdaya dönmüģ taģıtların istiflenmesinde bu tür sistemleri görmek mümkündür. Ayrıca dökümhanelerde de benzer sistemler kullanılmaktadır. 1641

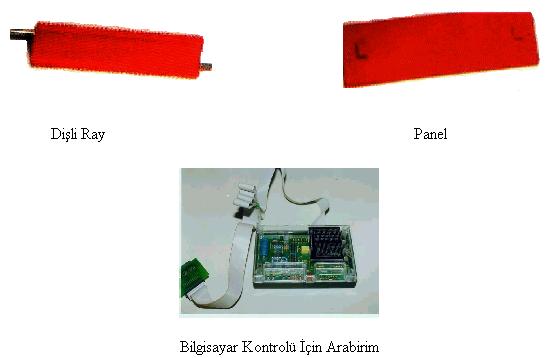
2 Ġnsan gücüne gerek duyulmadan, çok ağır metal parçalarının bu tür bir sistemle rahatlıkla kaldırılması, günümüzde bilinen bir sistemdir. Özellikle Avrupa'da araba çöplüklerindeki hurdaya dönmüģ taģıtların istiflenmesinde bu tür sistemleri görmek mümkündür. Ayrıca dökümhanelerde de benzer sistemler kullanılmaktadır. 4. MALZEME SEÇİMİ Sistem elektromıknatıs kullanılarak tasarlanmıģtır. Bunun yanı sıra motorların hareketini sınırlayan anahtarlar kullanılmıģtır (El, E2, E4, E5, E6, E7). Dönme ve düģey yönde yukarı-aģağı hareketler ise motorlarla sağlanmıģtır (M 1,M2,M3). 4.1 PROJEDE KULLANILAN MALZEMELER Bu benzetim projesinin monte edilmesinde aģağıda belirtilen malzemeler kullanılmıģtır. Bu malzemeler, robot montaj seti içerisinde hazır bulunmaktadır. Kutu içerisinde bulunmayan malzemeler ise, özel olarak temin edilmiģtir. 1642
. 4.")
3 1643
4 1644
5 4.2. PROJE MONTAJI VE GENEL GÖRÜNTÜLER Montajı gerçekleģtirilen sisteme ait resimler aģağıda verilmiģtir (Resim 1, Resim 2). 1645

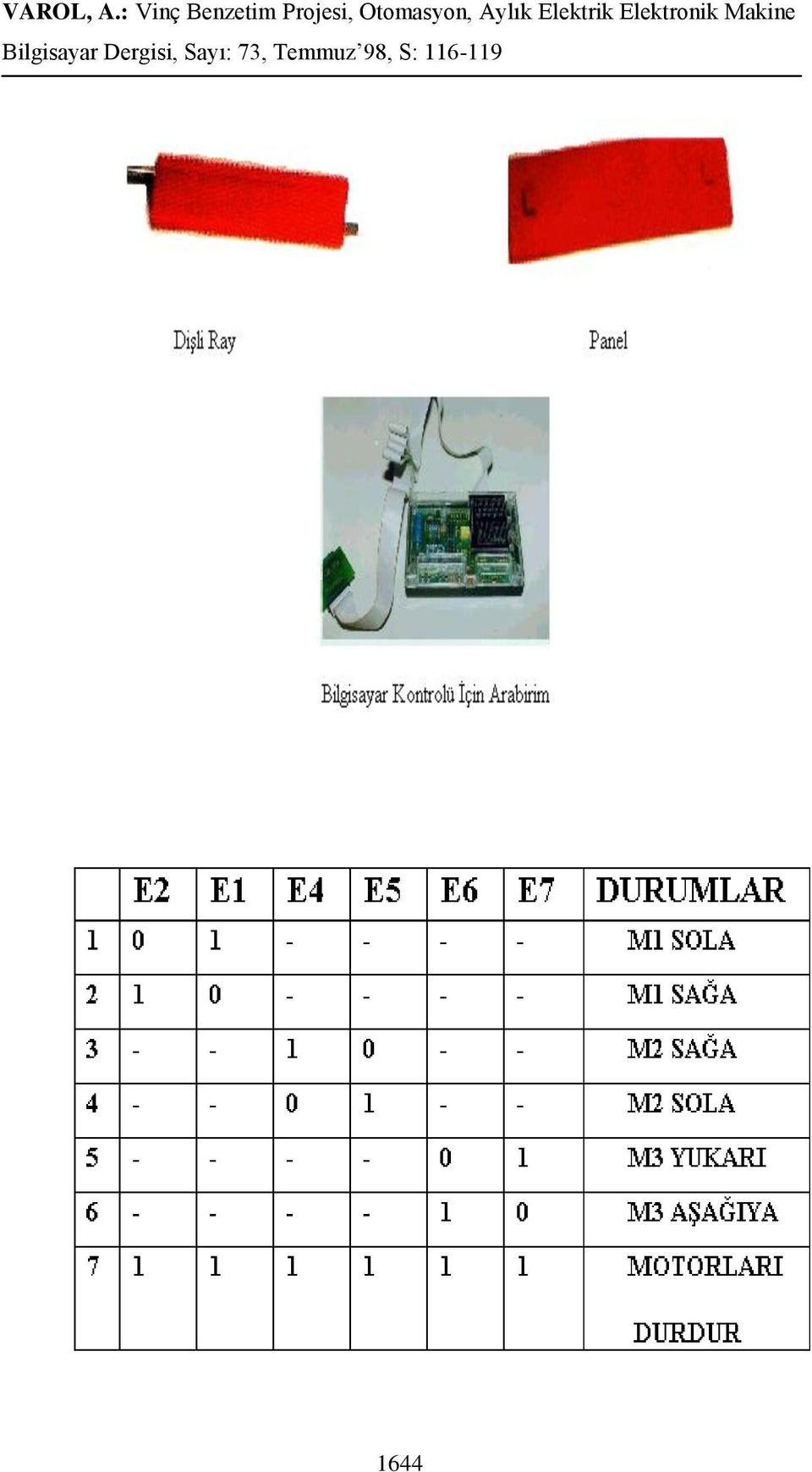
6 Otomatik Vinç Kolunun Yerleşim Planı 5. MOTOR VE ANAHTARLARIN GÖREVLERİ M1: Yürüyen bandın sağa ve sola gitmesini sağlayan motor, M2: Vinç kolunun sola ve sağa dönmesini sağlayan motor. M3: Elektromıknatısa bağlı olan bu koldaki motor, mıknatısı yukarı veya aģağıya çekmesini sağlamaktadır. E1,E2: Yürüyen bandın sağa ve sola hareketini sınırlamak için konmuģ anahtarlar. E4,E7: Vinç kolunun sağa ve sola hareketini sınırlamak için belli açıda döndürmek amacıyla konmuģ anahtarlar. 1646

7 E5,E6: Elektromıknatısa bağlı olan bu kolda bulunan anahtarlar, mıknatısın aģağı ve yukarı gitmesini sınırlamak için konulmuģlardır. E: Bu anahtar ise E2 anahtarına seri bağlı adaptör vasıtasıyla elektro mıknatısa gerekli manyetik alanın oluģması için konmuģtur. 6. PROGRAMIN YAZILIMI TO VİNÇ MSTOP ''M1 MSTOP ''M2 MSTOP ''M3 A TO A IF EQUALP STATUS ''E4 0 [MCW ''M2] IF EQUALP STATUS ''E4 1 [MSTOP ''M2] IF EQUALP STATUS ''E4 1 [B] A TO B 1647

8 IF EQUALP STATUS ''E5 0 [MCW ''M3] IF EQUALP STATUS ''E5 1 [MSTOP ''M3] IF EQUALP STATUS ''E5 1 [MSOLA] B TO MSOLA IF EQUALP STATUS ''E1 O [MCW ''M1] IF EQUALP STATUS ''E1 1 [MSTOP ''M1] IF EQUALP STATUS ''E1 1 [MSAĞA] MSOLA TO MSAĞA IF EQUALP STATUS ''E2 O [MCCW ''M1 ] IF EQUALP STATUS ''E2 1 [MSTOP ''M1] IF EQUALP STATUS ''E2 1 [YUK1] MSAGA TO YUK1 IF EQUALP STATUS ''E6 O [MCCW ''M3] IF EQUALP STATUS ''E6 1 [MSTOP ''M3] 1648
![[MSAĞA] MSOLA TO MSAĞA IF EQUALP STATUS ''E2 O [MCCW ''M1 ] IF EQUALP STATUS ''E2 1 [MSTOP ''M1] IF EQUALP](/docs-images/47/16589775/images/page_8.jpg "STATUS ''E2 1 [YUK1] MSAGA TO YUK1 IF EQUALP STATUS ''E6 O [MCCW ''M3] IF EQUALP STATUS ''E6 1 [MSTOP ''M3]")
9 IF EQUALP STATUS ''E6 1 [ViNÇA] YUKl TO VİNÇA IF EQUALP STATUS ''E7 O [MCCW ''M2] IF EQUALP STATUS ''E7 1 [MSTOP ''M2] IF EQUALP STATUS ''E7 1 [AġAĞI] ViNÇA TO AŞAĞI IF EQUALP STATUS ''E5 O [MCW ''M3] IF EQUALP STATUS ''E5 1 [MSTOP ''M3] IF EQUALP STATUS ''E5 1 [YUKARI] AġAĞI TO YUKARI IF EQUALP STATUS "E6 O [MCCW "M3] IF EQUALP STATUS "E6 1 [MSTOP "M3] IF EQUALP STATUS "E6 1 [VĠNÇO] 1649
![[MCW ''M3] IF EQUALP STATUS ''E5 1 [MSTOP ''M3] IF EQUALP STATUS ''E5 1 [YUKARI] AġAĞI TO YUKARI](/docs-images/47/16589775/images/page_9.jpg "IF EQUALP STATUS \"E6 O [MCCW \"M3] IF EQUALP STATUS \"E6 1 [MSTOP \"M3] IF EQUALP STATUS \"E6 1")
10 YUKARI TO VİNÇO IF EQUALP STATUS "E4 O [MCW "M2] IF EQUALP STATUS "E4 1 [MST9P "M2] IF EQUALP STATUS "E4 1 [AġAGI] VĠNÇO TO AŞAĞI IF EQUALP STATUS "E5 O [MCW "M3] IF EQUALP STATUS "E5 1 [MSTOP "M3] IF EQUALP STATUS "E5 1 [MSOLA] AġAGI 7. PROGRAMIN GENEL AÇIKLAMASI BaĢlangıçta bütün motorları durdurulmalıdır, çünkü böylece herhangi bir elektrik kesilmesinde motorların tekrar baģtan çalıģtırılması sağlanır. Ġlk baģta E4 anahtarı 0 konumda iken M1 motoru çalıģır. E4 anahtarı 1 olana kadar M1 motoru dönmeye devam eder. Ġstenen açı gerçekleģtirildikten sonra, vinç kolunun metal parçanın altına gelmesi 1650

11 sağlanır. E5 anahtarı 0 konumunda iken, M3 motoru E5 1 olana kadar yukarı çıkmaya devam eder. M1 motoruna bağlı olan anahtar, bandı sağa hareket ettirerek metal parçanın alınması için metal konan yere E1 anahtarı 1 olana kadar gitmeye devam eder. M1 motoru sola hareket ettirilerek mıknatısın altına gelene kadar ve E2 anahtarı 1 olana dek, M1 motoru dönmeye devam edecektir. Elektromıknatısa seri bağlanmıģ E anahtarının, manyetik alan yaratarak metal parçayı çekmesi sağlanır. M3 motoru, E5 anahtarı 1 olana kadar yukarı çıkar. Daha sonra durur. M2 motoru sola doğru hareket ederek E4 anahtarı 1 olduğunda durur. M3 motoru aģağıya inerek elektromıknatısa seri bağlı adaptör ile anahtarı 0 olur ve mıknatıs metal parçayı bırakır. M3 motoru yukarı çıkar. E6 anahtarı 1 olana kadar çıkmaya devam eder. Aynı iģlemler tekrarlanarak yapılır. Resim 2. Metal Parçaları Almaya Giden Robot Kolu 1651

12 KAYNAK : [1] Otomatik Vinç Kolu, Fırat Üniversitesi, Teknik Eğitim Fakültesi, Elektronik-Bilgisayar Eğitimi Bölümü, Robotik Dersi, Proje no. 1998/

5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU. Engin AVCI [email protected]
 5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Engin AVCI [email protected] Abdulkadir ŞENGÜR [email protected] Özet Bu benzetim projesinde demir hurda
5.47. HURDA MALZEMELERİN PRESLENMESİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Engin AVCI [email protected] Abdulkadir ŞENGÜR [email protected] Özet Bu benzetim projesinde demir hurda
Varol, A.: Otomatik Pres Makinası, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 74, Ağustos 98, S: 98-101
 5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL [email protected] AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
5.11. OTOMATİK PRES MAKİNESİ Prof. Dr. Asaf VAROL [email protected] AMAÇ İnsan gücünün yetersiz kaldığı işlerin yapılmasında bir çok otomasyon ağırlıklı makineler ve sistemler geliştirilmiştir. İşlemlerin
VAROL, A.: Koli İstifleme Otomasyonu, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 107, Mayıs 2001, S: 114-119
 5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.38. KOLİ İSTİFLEME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Giderek artan insan ihtiyaçlarını karşılamak amacıyla fabrikalar, güvenilir ve seri üretime geçme ihtiyacı duymaktadır. Bu
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU
 5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.50. OTOMOBĠL TEKERLEĞĠ MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GiriĢ: Hızla geliģen bilgisayar teknolojisi, her alanda olduğu gibi etkisini robot teknolojisi ve otomasyon sistemleri
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ
 5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol [email protected] Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.6. KAPI KONTROLLÜ ASANSÖR PROJESİ Prof. Dr. Asaf Varol [email protected] Otomasyon Dergisinde "Robotik" sayfalarında sizlere sunulan örneklerin bir kısmı, günlük yaşantımızda sıkça karşılaştığımız
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ
 5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol [email protected] GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.22. OTOMATİK SU ÇEKME VE TAŞIMA SİSTEMİ Prof. Dr. Asaf Varol [email protected] GİRİŞ Bu projede sıvı maddelerin, bulunduğu yerlerden çıkartılıp taşınması otomasyonu yapılmaktadır. Projenin adı her
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU
 TEZGAHI OTOMASYONU") 5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol [email protected] ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.26. YÜZEY PARLATMA (SİLME) TEZGAHI OTOMASYONU Prof. Dr. Asaf Varol [email protected] ÖZET Teknolojinin büyük bir hızla ilerlediği günümüzde, arz-talep ilişkilerinin artması daha fazla mal üretimini
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU
 5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL [email protected] Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.39. MALZEME SAYIMI VE AMBALAJI PROJESİ OTOMASYONU Giriş: Prof. Dr. Asaf VAROL [email protected] Globalleşen dünyada insan ihtiyaçlarını hızlı ve kolay bir şekilde karşılayabilmek için seri üretime
5.33. OTOMATİK PARÇA DELME OTOMASYONU
 5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.33. OTOMATİK PARÇA DELME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Otomasyon sistemleri temelde üretimi hızlandırmak ve otomatikleştirmek için oluşturulmaktadır. Başlangıçta mekanik olan
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU
 5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde seramiklere
5.55. SERAMİKLERE SIR ATMA VE KURUTMA OTOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde seramiklere
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU
 5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.20. METAL YÜZEYLERİN BOYANMASI VE CİLALANMASI OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Dünyadaki insan nüfusunun artışına paralel olarak insanların istek ve ihtiyaçları da sürekli artmaktadır.
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ
 5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol [email protected] Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.14. ŞİFRELİ OTOMATİK GARAJ KAPISI KONTROL PROJESİ Prof. Dr. Asaf Varol [email protected] Özel şirketlerde ve özel güvenlik girişinin gerektiği yerlerde şifreli güvenlik kapısı kullanılır. Bu projede
5.28. UÇAKSAVAR PROJESİ
 5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol [email protected] Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.28. UÇAKSAVAR PROJESİ Prof. Dr. Asaf Varol [email protected] Sıcak savaşların yaşandığı bölgelerde uçak bombardımanları karşısında sivil halkın korunması için değişik yöntemler kullanılır. Bu bölgelerin
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU
 5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.23. SERA HAVALANDIRMA VE IŞIKLANDIRMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde arz-talep ilişkilerinin artması, daha hızlı çalışmayı
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU
 5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.19. ELEKTRONĠK DEVRE ELEMANI TEST OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GĠRĠġ: Endüstrinin çok büyük bir hızla geliştiği bir dünyada yaşamaktayız. Buna paralel olarak da, otomasyonun dünyada
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ
 5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.5. GÜNEŞİ İZLEYEN KOLLEKTÖRE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] Güneşi yatayda ve dikeyde, yani sağa-sola ve aşağı-yukarı hareket etmesini sağlayarak, tam olarak izlemesini
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ
 5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL [email protected] ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.25. TÜP GAZ DOLUM TESİSİ OTOMASYON SİSTEMİ PROJESİ Prof. Dr. Asaf VAROL [email protected] ÖZET Günümüz teknolojisinde tüpün yerine bir çok alternatifler gelmiş olsa bile kullanımı, pratikliği ve diğer
5.35. BASKI DEVRE MONTAJ OTOMASYONU
 5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.35. BASKI DEVRE MONTAJ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Projenin Amacı Bu projenin amacı; elektronik devrelerin baskı devresinin montajını, en kısa zaman içerisinde ve en iyi şekilde
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ
 5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.21. OTOMATİK ÇÖP TOPLAMA VE PRESLEME ÜNİTESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Teknolojinin büyük bir hızla ilerlediği günümüzde, işlemlerde zamanı optimum kullanma isteği otomasyon sistemlerinin
5.34. VİDA YUVASI AÇMA OTOMASYONU
 5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.34. VİDA YUVASI AÇMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş: Günümüzde birçok alanda özellikle üretimde otomasyon sistemleri kullanılmaktadır. Otomasyonun girdiği ortamlarda insan
5.17. ARICILIK BENZETİM PROJESİ
 5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.17. ARICILIK BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ Arıcılık, zevkli, eğlenceli ve kazanç getiren işlerdendir. Kısa sürede verim almak mümkündür. Büyük yatırım gerektirmez. Tarımsal
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU
 5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.45. KONNEKTÖRLERE KABLO EKLEME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş Günümüzde birçok elektronik aletin bağlantıları konnektörlerle sağlanmaktadır. Çeşitli elektronik aletler bu konnektörler
5.1. OTOBAN GEÇİŞ SİSTEMİ
 5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol [email protected] Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.1. OTOBAN GEÇİŞ SİSTEMİ Prof. Dr. Asaf Varol [email protected] Bu çalışmada sürücünün kredi kartıyla geçiş ücretini ödeyerek otoban girmesi otomatik olarak gerçekleşmiştir. Bu projede otomasyon; Logo
5.40. SPREY DOLDURMA OTOMASYONU
 5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.40. SPREY DOLDURMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş Teknolojinin büyük bir hızla ilerlediği günümüzde zamanı optimum kullanma isteği otomasyon sistemlerinin hepsinde önemli bir
5.13. SONDAJ MAKİNESİ PROJESİ
 5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL [email protected] 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.13. SONDAJ MAKİNESİ PROJESİ Prof. Dr. Asaf VAROL [email protected] 1. AMAÇ Günümüzün en popüler teknolojilerinden biri de otomasyondur.otomasyonun girdiği ortamlarda insan müdahalesi minimuma inmiştir.
5.36. FINDIK SAVURMA OTOMASYONU
 5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.36. FINDIK SAVURMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ: Gelişen endüstri dünyası içinde, bir çok alanda insan gücü yerine kararlılık, hız ve hata azlığı gibi unsurlar göz önüne
5.2. OTOMATİK ARABA YIKAMA PROJESİ
 5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol [email protected] Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.2. OTOMATİK ARABA YIKAMA PROJESİ Prof. Dr. Asaf Varol [email protected] Günümüz insanlarının en büyük problemi zamanı iyi bir biçimde kullanamamalarıdır. Modern teknolojiler kullanılarak, alışılagelmiş
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU
 5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol [email protected] Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.30. METAL SAC MALZEMELERİN PRESLENEREK CR-Nİ KAPLANMASI OTOMASYONU Prof. Dr. Asaf Varol [email protected] Özet: Bilim ve teknikteki hızlı gelişme endüstri alanını da bir çok yönden etkilemiştir. Endüstrideki
5.46. EBAT KONTROL OTOMASYONU
 5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.46. EBAT KONTROL OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş: ÇeĢitli bilimsel, sanayi, tarımsal ve idari iģlerin yürütülmesinde insan müdahalesini tamamen ya da kısmen ortadan kaldırmaya
5.41. UYDU ANTENİ YÖNLENDİRME OTOMASYON PROJESİ
 5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.41. UYDU ANTENİ YÖNLİRME OTOMASYON PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ 1960 lı yıllardan sonra ABD ve Rusya arasında yaşanan aya adım atma yarışı uzay teknolojisinin süratle gelişmesine
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU
 5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.31. MODÜLER MOBİLYA ÜRETİMİNDE KULLANILAN SERİ ÜRETİM HATLARINDAN ZIMPARA MAKİNASININ BESLEME ÜNİTESİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] ÖZET: GeliĢen teknolojilerin en büyük eksikliği
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU
 5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.49. METRO ULAŞIM SİSTEMİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş: Metro ulaģım sisteminde amaç araçların değil insanların ekonomik, hızlı ve güvenli bir biçimde ulaģımına öncelik vermektir.
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ
 5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.8. KAYISI İSLİMLEME BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] Yaş kayısıları kuru kayısı haline gelebilmesi için kimyasal bir madde olan kükürt ile belli bir süre kapalı bir mekanda tepkimeye
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ
 5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.12. OTOMATİK RÖNTGEN ÇEKEN ROBOT PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ Otomatik röntgen çeken robot projesi ile röntgen cihazını bir robot koluna adapte ederek tıpta kullanılan röntgen
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ
 5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol [email protected] Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.27. ŞİFRELİ OTOMATİK KAPI KONTROL PROJESİ Prof. Dr. Asaf Varol [email protected] Yoğun bir insan trafiğine maruz kalan havaalanı, uluslararası ve şehirlerarası otogar veya garlarda, giriş çıkışı sağlayan
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU. Abdulkadir Şengür [email protected]
 5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde çok sayıda birimlerden
5.56. KİMYASAL MADDE TAŞIMA OTOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde çok sayıda birimlerden
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU
 5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.24. TAVUK KÜMESLERİ İÇİN SULAMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Günümüzde üretim sektöründe geliģme hızlı bir Ģekilde sürmektedir. Üretimin her çeģidinde hız, güven ve düģük
5.48. KALİTE KONTROL OTOMASYONU
 5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Abdulkadir Şengür [email protected] Engin Avci [email protected] Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.48. KALİTE KONTROL OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Abdulkadir Şengür [email protected] Engin Avci [email protected] Özet Bu benzetim projesinde boyutlara bağlı olarak hatalı
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU. Abdulkadir ġengür
 5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir ġengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde elektronik cihazlarda
5.54. ENTEGRELERE SOĞUTUCU MONTAJI TOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir ġengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde elektronik cihazlarda
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI
 5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol [email protected] Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.7. KARA MAYINLARININ TESPİTİ VE İMHASI Prof. Dr. Asaf Varol [email protected] Günümüzde robot teknolojisi büyük önem arz etmektedir. Robotlar önceleri genelde bir nesneyi alıp başka bir yere koymaya
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU
 5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.44. KAYA TUZU AYRIŞTIRMA OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Giriş Bu benzetim projesi ile doğadan çıkartılan ham madde kaya tuzunu ayrıştırmanın nasıl yapılabileceği ele alınmaktadır.
5.51. SERAMİK PAKETLEME OTOMASYONU
 5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.51. SERAMİK PAKETLEME OTOMASYONU Prof. Dr. Asaf VAROL [email protected] 1. PROJENİN KONUSU Gün geçtikçe teknoloji, yaşamımızın her alanında kendini iyiden iyiye hissettirmektedir. İnşaat, tıp, madencilik
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU
 5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.29. MERMER İŞLEME TESİSİ BENZETİM PROJESİ OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Önsöz Otomasyon kelimesi; Bir kontrol ünitesi veya mikroişlemci aracılığıyla, yapacağı işler önceden kendisine
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.18. BİSKÜVİ ÜRETİMİNDE KULLANILAN BİR OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] 1. PROJENİN KONUSU Projenin konusu, bisküvi üretiminde kullanılan bir otomasyon
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI
 5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol [email protected] Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.4. SIVI İÇECEKLERİN ŞİŞELERE DOLDURULMASI Prof. Dr. Asaf Varol [email protected] Otomasyonun sözlüklerde; "Endüstride, yönetimde ve bilimsel işlerde insan aracılığı olmadan işlerin otomatik olarak
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ
 5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol [email protected] Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.10. OTOMATİK MİL TAŞLAMA BENZETİM PROJESİ Prof. Dr. Asaf Varol [email protected] Sayısal kontrollü torna, freze, taşlama, matkap vb. tezgahlar yıllardır sanayimizin hizmetindedir. Artık Türkiye'de
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ
 5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.16. ZEYTİNYAĞI İMAL EDEN OTOMASYON SİSTEMİNE AİT BENZETİM PROJESİ Prof. Dr. Asaf VAROL [email protected] GİRİŞ Yemek; zaman süreci olarak insan hayatında oldukça yer tutar ve insanlar için ayrılmaz
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU
 5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Engin Avcı [email protected] Abdulkadir Şengür [email protected] Giriş Ülkemizde
5.52. SİLAH NAMLUSUNA YİV AÇMA VE HATALI NAMLULARIN AYIKLANMASI OTOMASYONU Prof. Dr. Asaf VAROL [email protected] Engin Avcı [email protected] Abdulkadir Şengür [email protected] Giriş Ülkemizde
5.9. OTOMATİK MEYVE SOYMA VE DİLİMLEME MAKİNASI
 5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol [email protected] Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.9. OTOMATİK MYV SOYMA V DİLİMLM MAKİNASI Prof. Dr. Asaf Varol [email protected] Özellikle elektronik ve bilgisayar alanındaki gelişmeler, insanların yaşamını daha kolay bir hale getirmektedir. Çağımız
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU
 5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.37. HEMZEMİN GEÇİTLERDE GÜVENLİK OTOMASYONU Prof. Dr. Asaf VAROL [email protected] GİRİŞ Yaşamının önemli bir parçası haline gelen otomasyon sistemleri ile sürekli karşılaşmaktayız. Otomasyon sistemleri
5.43. CAM TUĞLA BOYAMA OTOMASYONU
 5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol [email protected] 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
5.43. CAM TUĞLA BOYAMA OTOMASYONU Prof. Dr. Asaf Varol [email protected] 1. Giriş: Endüstri çok yönlü gelişimini sürdürürken öne çıkan konulardan biri de, mamûllerin verimli ve sağlıklı bir şekilde taşınması,
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS
 4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
4.13. EĞİTİM AMAÇLI ROBOTLARIN LOGO İLE PROGRAMLANMASI LOGO PROGRAMMİNG EDUCATİONAL ROBOTS ÖZGEÇMiŞLER Prof. Dr. Asaf Varol 1997'de Bilgisayar Sistemleri Anabilim Dalı'nda profesör oldu. Halen Fırat Üniversitesi
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI
 5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. [email protected] Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5.63. YÜK KONTROLLÜ ASANSÖR ROBOT TASARIMI Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. [email protected] Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt
5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ
 5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ VAROL, A.: Otoban GeçiĢ Sistemi, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 65, Kasım 97, S: 38-41 5.1. OTOBAN GEÇĠġ SĠSTEMĠ
5. BÖLÜM OTOMASYON DERGĠSĠNDE YAYIMLANAN MAKALELERĠ VAROL, A.: Otoban GeçiĢ Sistemi, Otomasyon, Aylık Elektrik Elektronik Makine Bilgisayar Dergisi, Sayı: 65, Kasım 97, S: 38-41 5.1. OTOBAN GEÇĠġ SĠSTEMĠ
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU. Abdulkadir Şengür [email protected]
 5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.58. YÜK KONTROLLÜ TAŞIMA ARACI OTOMASYONU Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde, insan gücüne ihtiyaç
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU
 5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. [email protected] ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.62. SENSÖR KONTROLLÜ OTOPARK BARĠYER OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. [email protected] ArĢ. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU. Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ
 4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:[email protected] 2 e posta:[email protected]
4.40. RCX KONTROLLÜ VĠNÇ OTOMASYONU 1 Asaf VAROL 2 Ferhat BAĞÇACI 1,2 Fırat Üniversitesi Teknik Eğitim Fakültesi, Elektronik ve Bilgisayar Eğitimi Bölümü, Elazığ 1 e posta:[email protected] 2 e posta:[email protected]
 İstenilen sayıdaki varlığı yuvarlak içine al. 2 I 3 2 " 4 tane olanı yuvarlak içine al 4 4 4 4 4 4 5 Tane olanı yuvarlak içine al 5 5 5 5 "" " "" Legolarla toplama işlemlerini
İstenilen sayıdaki varlığı yuvarlak içine al. 2 I 3 2 " 4 tane olanı yuvarlak içine al 4 4 4 4 4 4 5 Tane olanı yuvarlak içine al 5 5 5 5 "" " "" Legolarla toplama işlemlerini
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU
 5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. [email protected] Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.60. AĞIRLIK DENETİMLİ NAKİL ARACI OTOMASYONU Prof. Dr. Asaf VAROL Fırat Üniversitesi T.E.F. Elk. ve Bilg. Eğt Böl. [email protected] Arş. Gör. Ferhat BAĞÇACI Fırat Üniversitesi T.E.F. Elk. ve Bilg.
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ. Abdulkadir Şengür [email protected]
 5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.57. KIZIL ÖTESİ IŞIK KONTROLLÜ ARAÇ Prof. Dr. Asaf Varol [email protected] Abdulkadir Şengür [email protected] Engin Avcı [email protected] Özet Bu benzetim projesinde, önüne çıkan engeli algılayan
5.3. ROBOTLAR VE ISI KONTROLÜ
 5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol [email protected] Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
5.3. ROBOTLAR VE ISI KONTROLÜ Prof. Dr. Asaf Varol [email protected] Ağır sanayide insan gücünün yerine robotların kullanılmasının günden güne artış göstermesi; robotik bilim dalının, diğer bilim dalları
Mıknatıs Çeşitleri 1. Doğal mıknatıs: 2. Yapay mıknatıs: 3. Elektromıknatıs:
 MIKNATIS Magnetik adı verilen demir oksit (Fe 3 O 4 ) bileşiği tabii bir mıknatıs olarak bilinir. Demir, nikel, kobalt gibi maddeleri çekme özelliği gösteren cisimlere mıknatıs denir. 2 Mıknatıs Çeşitleri
MIKNATIS Magnetik adı verilen demir oksit (Fe 3 O 4 ) bileşiği tabii bir mıknatıs olarak bilinir. Demir, nikel, kobalt gibi maddeleri çekme özelliği gösteren cisimlere mıknatıs denir. 2 Mıknatıs Çeşitleri
SÜPERİLETKEN TEKNOLOJİLERİ-4 Süperiletken Maglev Trenler. Doç. Dr. Zeynep GÜVEN ÖZDEMİR Yrd.Doç.Dr.Özden ASLAN ÇATALTEPE
 SÜPERİLETKEN TEKNOLOJİLERİ-4 Süperiletken Maglev Trenler Doç. Dr. Zeynep GÜVEN ÖZDEMİR Yrd.Doç.Dr.Özden ASLAN ÇATALTEPE 1 Bilinen en güvenli ulaşım araçları, sabit bir ray üzerinde ve karada gittiklerinden
SÜPERİLETKEN TEKNOLOJİLERİ-4 Süperiletken Maglev Trenler Doç. Dr. Zeynep GÜVEN ÖZDEMİR Yrd.Doç.Dr.Özden ASLAN ÇATALTEPE 1 Bilinen en güvenli ulaşım araçları, sabit bir ray üzerinde ve karada gittiklerinden
AÇILIġ EKRANI. G:220 Ç:220 Y:000 SERVOMATĠK REG 05 Sn. KORUMA AYARLARI KORUMA AYARLARI
 SERVOMATĠK REGÜLÂTÖR LCD PANELLĠ MĠKRO ĠġLEMCĠLĠ SERVO KONTROL ÜNĠTESĠ KULLANMA KLAVUZU AÇILIġ EKRANI G:220 Ç:220 Y:000 SERVOMATĠK REG 05 Sn. Regülatör açıldığında çıkıģ değerleri, ayarlanan değerler içindeyse;
SERVOMATĠK REGÜLÂTÖR LCD PANELLĠ MĠKRO ĠġLEMCĠLĠ SERVO KONTROL ÜNĠTESĠ KULLANMA KLAVUZU AÇILIġ EKRANI G:220 Ç:220 Y:000 SERVOMATĠK REG 05 Sn. Regülatör açıldığında çıkıģ değerleri, ayarlanan değerler içindeyse;
Bobin Gövdesi. Flanşı Tork Ayar Vidası. Balata. Dişli. Montaj Vidası
 Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
Kompakt bir yapıya sahip olan serisi frenler kontrollü veya kontrolsüz elektrik kesilmelerinde devreye giren kolay montajlı sistemlerdir. Vinç ve otomasyon sistemlerinde, asansörlerde, tekstil, tarım,
8. SINIF FİZİK DENEYLERİ DENEY NO
 8. SINIF FİZİK DENEYLERİ DENEY NO : 1 DENEYİN ADI : MANYETĠK KUVVET VE MIKNATIS DENEYİN AMACI : Manyetik kuvvetin özelliklerinin incelenmesi. KULLANILAN MALZEMELER : Su, karton, kâğıt parçaları, sünger,
8. SINIF FİZİK DENEYLERİ DENEY NO : 1 DENEYİN ADI : MANYETĠK KUVVET VE MIKNATIS DENEYİN AMACI : Manyetik kuvvetin özelliklerinin incelenmesi. KULLANILAN MALZEMELER : Su, karton, kâğıt parçaları, sünger,
CONTACT. www.neoflex.com.tr e-mail: [email protected]
 CONTACT www.neoflex.com.tr e-mail: [email protected] SERİM SPESĠFĠKASYON VE FLEXĠTANK SEÇĠMĠ TaĢınacak ürün spesifikasyonuna uygun flexitank seçimi en önemli konudur. SPESĠFĠKASYON VE KONTEYNIR SEÇĠMĠ
CONTACT www.neoflex.com.tr e-mail: [email protected] SERİM SPESĠFĠKASYON VE FLEXĠTANK SEÇĠMĠ TaĢınacak ürün spesifikasyonuna uygun flexitank seçimi en önemli konudur. SPESĠFĠKASYON VE KONTEYNIR SEÇĠMĠ
ACD BİLGİ İŞLEM ACD KABLOSUZ VERİ TOPLAMA SİSTEMLERİ URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ. URT-V2 Terminallerinin
 ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
ACD BİLGİ İŞLEM URT-V2 KABLOSUZ VERİ TOPLAMA TERMİNALİ DONANIM TEKNİK BELGESİ URT-V2 Terminallerinin Donanım Özellikleri Genel Yetenekleri Terminal Dış Özellikler Montajda Dikkat Edilmesi Gereken Hususlar
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MONTAJ KLAVUZU
 Türkiye nin İLK ve TEK Çift Motorlu Dişlisiz Otomatik Kapı Sistemi MONTAJ KLAVUZU www.schmelz.com.tr ĐÇĐNDEKĐLER 1. TEKNĐK ÖZELLĐKLER... Sayfa 03 2. MONTAJ TALĐMATLARI... Sayfa 04 2.1 MEKANĐZMA VE AKSESUARLARI...
Türkiye nin İLK ve TEK Çift Motorlu Dişlisiz Otomatik Kapı Sistemi MONTAJ KLAVUZU www.schmelz.com.tr ĐÇĐNDEKĐLER 1. TEKNĐK ÖZELLĐKLER... Sayfa 03 2. MONTAJ TALĐMATLARI... Sayfa 04 2.1 MEKANĐZMA VE AKSESUARLARI...
T.C. KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ. Mühendislik Fakültesi PIC PROGRAMLAMA İLE ROBOT KOLU KONTROLÜ BİTİRME ÇALIŞMASI
 T.C. KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölüm PIC PROGRAMLAMA İLE ROBOT KOLU KONTROLÜ BİTİRME ÇALIŞMASI ABDULLAH UYSAL ONUR YILMAZ HALĠT ATEġ Yrd. Doç.
T.C. KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ Mühendislik Fakültesi Elektrik Elektronik Mühendisliği Bölüm PIC PROGRAMLAMA İLE ROBOT KOLU KONTROLÜ BİTİRME ÇALIŞMASI ABDULLAH UYSAL ONUR YILMAZ HALĠT ATEġ Yrd. Doç.
Bu rapor, 6085 sayılı Sayıştay Kanunu uyarınca yürütülen düzenlilik denetimi sonucu hazırlanmıştır.
 T..C.. SSAYIIġġTAY BAġġKANLIIĞII EDĠĠRNE ĠĠL ÖZEL ĠĠDARESSĠĠ 22001122 YIILII DENETĠĠM RAPPORU HAZİRAN 2013 T.C. SAYIġTAY BAġKANLIĞI 06100 Balgat / ANKARA Tel: 0 312 295 30 00; Faks: 0 312 295 40 94 e-posta:
T..C.. SSAYIIġġTAY BAġġKANLIIĞII EDĠĠRNE ĠĠL ÖZEL ĠĠDARESSĠĠ 22001122 YIILII DENETĠĠM RAPPORU HAZİRAN 2013 T.C. SAYIġTAY BAġKANLIĞI 06100 Balgat / ANKARA Tel: 0 312 295 30 00; Faks: 0 312 295 40 94 e-posta:
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. Proje Adı Proje No
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No El yapımı elektrik motoru - 3 Proje Raporu Adı, Soyadı, Öğrenci Numarası
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ Proje Adı Proje No El yapımı elektrik motoru - 3 Proje Raporu Adı, Soyadı, Öğrenci Numarası
ALEVSIZDIRMAZLIK TESTĠ
 REFERANS BASINÇ TESTĠ Testi yapılacak alevsızdırmaz muhafaza içine tüm aksesuar ve iç malzemeleri yerleģtirilir, Cıvatalar belirtilen tork değerinden daha fazla değerde sıkılmak sureti ile flanģ yüzeylerinden
REFERANS BASINÇ TESTĠ Testi yapılacak alevsızdırmaz muhafaza içine tüm aksesuar ve iç malzemeleri yerleģtirilir, Cıvatalar belirtilen tork değerinden daha fazla değerde sıkılmak sureti ile flanģ yüzeylerinden
T.C. GÜMRÜK VE TİCARET BAKANLIĞI. Gümrükler Genel Müdürlüğü 05.12.2013 GENELGE (2013/50)
") T.C. GÜMRÜK VE TİCARET BAKANLIĞI Gümrükler Genel Müdürlüğü Sayı :26484290-010.06.01 Konu : Sınıflandırma 05.12.2013 GENELGE (2013/50) Bakanlığımıza intikal eden bilgilerin değerlendirilmesi sonucunda ekli
T.C. GÜMRÜK VE TİCARET BAKANLIĞI Gümrükler Genel Müdürlüğü Sayı :26484290-010.06.01 Konu : Sınıflandırma 05.12.2013 GENELGE (2013/50) Bakanlığımıza intikal eden bilgilerin değerlendirilmesi sonucunda ekli
KARABÜK ÜNİVERSİTESİ 2014 YILI SAYIŞTAY DENETİM RAPORU
 KARABÜK ÜNİVERSİTESİ 2014 YILI SAYIŞTAY DENETİM RAPORU Ağustos 2015 İÇERİK KARABÜK ÜNİVERSİTESİ 2014 YILI DÜZENLİLİK DENETİM RAPORU 1 KARABÜK ÜNİVERSİTESİ DÖNER SERMAYE İŞLETMESİ 2014 YILI DÜZENLİLİK
KARABÜK ÜNİVERSİTESİ 2014 YILI SAYIŞTAY DENETİM RAPORU Ağustos 2015 İÇERİK KARABÜK ÜNİVERSİTESİ 2014 YILI DÜZENLİLİK DENETİM RAPORU 1 KARABÜK ÜNİVERSİTESİ DÖNER SERMAYE İŞLETMESİ 2014 YILI DÜZENLİLİK
MPRD-FAZ ALICI ÜNİTE KULLANIM KILAVUZU
 MPRD-FAZ ALICI ÜNİTE KULLANIM KILAVUZU kalite UDEA ELEKTRONİK A.Ş. İçindekiler MPRD-FAZ ALICI ÜNİTE... 2 MPRD-FAZ ALICI ÜNİTENİN GENEL ÖZELLİKLERİ... 2 Kumanda Öğretme İşlemi... 3 Kumanda Silme İşlemi...
MPRD-FAZ ALICI ÜNİTE KULLANIM KILAVUZU kalite UDEA ELEKTRONİK A.Ş. İçindekiler MPRD-FAZ ALICI ÜNİTE... 2 MPRD-FAZ ALICI ÜNİTENİN GENEL ÖZELLİKLERİ... 2 Kumanda Öğretme İşlemi... 3 Kumanda Silme İşlemi...
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ. DC Motor Hız Kontrolü Proje No: 1
 YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ DC Motor Hız Kontrolü Proje No: 1 Proje Raporu Cemre ESEMEN 12068033 16.01.2013 İstanbul
YILDIZ TEKNİK ÜNİVERSİTESİ MAKİNE FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MEKATRONİK MÜHENDİSLİĞİNE GİRİŞ DERSİ DC Motor Hız Kontrolü Proje No: 1 Proje Raporu Cemre ESEMEN 12068033 16.01.2013 İstanbul
2017 YILI AĞUSTOS AYI FAALİYET RAPORU
 PROJE ADI KONU ve TARİH KAVAKLI KONAKLARI SĠTESĠ 2017 AĞUSTOS AYI FAALĠYET RAPORU 1. SİTE TANITIMI, YÖNETİM KURULU, ORGANİZASYON ŞEMASI Ġstanbul ili, Beylikdüzü Ġlçesi, Kavaklı Mahallesi Kavaklı Caddesi
PROJE ADI KONU ve TARİH KAVAKLI KONAKLARI SĠTESĠ 2017 AĞUSTOS AYI FAALĠYET RAPORU 1. SİTE TANITIMI, YÖNETİM KURULU, ORGANİZASYON ŞEMASI Ġstanbul ili, Beylikdüzü Ġlçesi, Kavaklı Mahallesi Kavaklı Caddesi
Yeni Nesil Beton Santralleri Başlıca Avantajları PowerMix 180 TEKNİK ÖZELLİKLERİ Model: Kapasite: Karıştırıcı Mikser: AGREGA BUNKER
 Yeni Nesil Beton Santralleri Başlıca Avantajları PowerMix 180 Demirstar, değişik kapasite ve özelliklerde ürettiği sabit beton santralleri ile beton üreticilerinin tüm ihtiyaçlarına rahatlıkla cevap verebilmektedir.
Yeni Nesil Beton Santralleri Başlıca Avantajları PowerMix 180 Demirstar, değişik kapasite ve özelliklerde ürettiği sabit beton santralleri ile beton üreticilerinin tüm ihtiyaçlarına rahatlıkla cevap verebilmektedir.
ELEKTRĐK MOTORLARI ve SÜRÜCÜLERĐ DERS 01
 DERS 01 Özer ŞENYURT Mart 10 1 DA ELEKTRĐK MAKĐNALARI Doğru akım makineleri mekanik enerjiyi doğru akım elektrik enerjisine çeviren (dinamo) ve doğru akım elektrik enerjisini mekanik enerjiye çeviren (motor)
DERS 01 Özer ŞENYURT Mart 10 1 DA ELEKTRĐK MAKĐNALARI Doğru akım makineleri mekanik enerjiyi doğru akım elektrik enerjisine çeviren (dinamo) ve doğru akım elektrik enerjisini mekanik enerjiye çeviren (motor)
MKT 210 OTOMATĠK KONTROL
 KOCAELĠ ÜNĠVERSĠTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MKT 210 OTOMATĠK KONTROL Doç.Dr. H.Metin ERTUNÇ 2012 BAHAR DÖNEMĠ ĠĢlenecek konular Kontrol sistemlerinin tanımı. Kontrol sistemlerinin önemi. Kontrol
KOCAELĠ ÜNĠVERSĠTESĠ MEKATRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ MKT 210 OTOMATĠK KONTROL Doç.Dr. H.Metin ERTUNÇ 2012 BAHAR DÖNEMĠ ĠĢlenecek konular Kontrol sistemlerinin tanımı. Kontrol sistemlerinin önemi. Kontrol
PROGRESİV(KADEMELİ) SİSTEMLER
 SİSTEMLER") PROGRESİV(KADEMELİ) SİSTEMLER PROGRESİV(KADEMELİ) SİSTEMLER Progresiv bir sistem çalışmaya başladığı zaman blok içerisinde bulunan pistonlar sırayla hareket etmeye başlar ve birbirlerini sırayla tahrik
PROGRESİV(KADEMELİ) SİSTEMLER PROGRESİV(KADEMELİ) SİSTEMLER Progresiv bir sistem çalışmaya başladığı zaman blok içerisinde bulunan pistonlar sırayla hareket etmeye başlar ve birbirlerini sırayla tahrik
11.1. ELEKTRONİK ATEŞLEME SİSTEMLERİ ( ELECTRONIC IGNATION )
") 11. DİĞER ELEKTRONİK SİSTEMLER 11.1. ELEKTRONİK ATEŞLEME SİSTEMLERİ ( ELECTRONIC IGNATION ) Elektronik ateşlemenin diğerlerinden farkı, motorun her durumda ateşleme zamanlamasının hassas olarak hesaplanabilmesidir.
11. DİĞER ELEKTRONİK SİSTEMLER 11.1. ELEKTRONİK ATEŞLEME SİSTEMLERİ ( ELECTRONIC IGNATION ) Elektronik ateşlemenin diğerlerinden farkı, motorun her durumda ateşleme zamanlamasının hassas olarak hesaplanabilmesidir.
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ
 YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
YILDIZ TEKNIK ÜNİVERSİTESİ ELEKTRİK - ELEKTRONİK FAKULTESİ ELEKLTRONİK VE HABERLEŞME MÜHENDİSLİĞİ BÖLÜMÜ GEZGİN ROBOT UYGULAMASI ORHAN BEDİR ORHAN MERT Proje Danışmanı : Y.Doç.Dr. Tuncay UZUN İstanbul,
Gübre bantları her bir tam dönüş yaptıklarında arka başlık üzerinde bulunan gübre sıyırma aparatı ve sıyırıcı tavalar sayesinde üzerindeki
 Kümes sistemi içinde amaca en çok hizmet eden eleman kafes sistemidir. EGE KAFES sisteminde klasik tavuk kafesi (EGE 60 ) ebatı 600x580x600mm (600x600)olarak imal edilmektedir. 60x60 kümesler için göz
Kümes sistemi içinde amaca en çok hizmet eden eleman kafes sistemidir. EGE KAFES sisteminde klasik tavuk kafesi (EGE 60 ) ebatı 600x580x600mm (600x600)olarak imal edilmektedir. 60x60 kümesler için göz
OTO KONTROL. Hazırlayan Öğrenciler. Ceren KAYRAKÇI (8-B) Berk Ata TÜRKYILMAZ (8-B) Danışman Öğretmen. Pınar ÇALIK ÖZBAY
 Berk Ata TÜRKYILMAZ (8-B) Danışman Öğretmen. Pınar ÇALIK ÖZBAY") OTO KONTROL Hazırlayan Öğrenciler Ceren KAYRAKÇI (8-B) Berk Ata TÜRKYILMAZ (8-B) Danışman Öğretmen Pınar ÇALIK ÖZBAY İZMİR, 2014 İÇİNDEKİLER 1. Proje özeti...2 2. Projenin amacı...2 3. Giriş...2 4. Yöntem...3
OTO KONTROL Hazırlayan Öğrenciler Ceren KAYRAKÇI (8-B) Berk Ata TÜRKYILMAZ (8-B) Danışman Öğretmen Pınar ÇALIK ÖZBAY İZMİR, 2014 İÇİNDEKİLER 1. Proje özeti...2 2. Projenin amacı...2 3. Giriş...2 4. Yöntem...3
2017 NİSAN AYI YÖNETİM KURULU FAALİYET RAPORU
 PROJE ADI KONU ve TARİH BEYLĠFE CĠTY KONUTLARI YÖNETĠCĠLĠĞĠ 01 NĠSAN 2017-30 NĠSAN 2017 FAALĠYET RAPORU 1. GİRİŞ Ġstanbul ili, Beylikdüzü Ġlçesi, Cumhuriyet Mahallesi Ali Talip Özdemir Caddesi üzerinde
PROJE ADI KONU ve TARİH BEYLĠFE CĠTY KONUTLARI YÖNETĠCĠLĠĞĠ 01 NĠSAN 2017-30 NĠSAN 2017 FAALĠYET RAPORU 1. GİRİŞ Ġstanbul ili, Beylikdüzü Ġlçesi, Cumhuriyet Mahallesi Ali Talip Özdemir Caddesi üzerinde
İÇİNDEKİLER SAYFA - 1 SAYFA 1. GENEL 2 2. AĞIR TİP ZU-270 KARKASIN GENEL ÖZELLİKLERİ 3 3. MONTAJ KLAVUZU 4 4. GENEL TALİMATLAR 17
 SAYFA - 1 İÇİNDEKİLER SAYFA 1. GENEL 2 2. AĞIR TİP ZU-270 KARKASIN GENEL ÖZELLİKLERİ 3 3. MONTAJ KLAVUZU 4 4. GENEL TALİMATLAR 17 5. ŞİRKET BİLGİLERİ son sayfa SAYFA - 2 1. GENEL 1.1. AMAÇ Bu dosyada Zu-210
SAYFA - 1 İÇİNDEKİLER SAYFA 1. GENEL 2 2. AĞIR TİP ZU-270 KARKASIN GENEL ÖZELLİKLERİ 3 3. MONTAJ KLAVUZU 4 4. GENEL TALİMATLAR 17 5. ŞİRKET BİLGİLERİ son sayfa SAYFA - 2 1. GENEL 1.1. AMAÇ Bu dosyada Zu-210
MRL SÜSPANSİYON VE MAKİNA ŞASESİ KURULUM KILAVUZU
 MRL SÜSPANSİYON VE MAKİNA ŞASESİ KURULUM KILAVUZU İçindekiler i. Giriş... 3 ii. Güvenlik Önlemleri ve Uyarılar... 3 iii. Sevkiyat ve Saklama Koşulları... 3 1. Süspansiyon Genel Ölçüler... 4 1.1. Parça
MRL SÜSPANSİYON VE MAKİNA ŞASESİ KURULUM KILAVUZU İçindekiler i. Giriş... 3 ii. Güvenlik Önlemleri ve Uyarılar... 3 iii. Sevkiyat ve Saklama Koşulları... 3 1. Süspansiyon Genel Ölçüler... 4 1.1. Parça
BÖLME ALIġTIRMALARI. Bölme iģlemlerini yapınız. Doğruluğunu kontrol ediniz X X
 BÖLME ALIġTIRMALARI Bölme iģlemlerini yapınız. Doğruluğunu kontrol ediniz. 1 9 8 7 2 8 1 9 6 5 4 9 2 3-1 4 2 8 X 7 + 2 X + 5 8 1 9 6 1 9 8-5 6 2 6 1 8 1 8 7 0 9 1 3 2 5 5 1 5 6 2 2 2 2 2 5 4 1 6 7 0 1
BÖLME ALIġTIRMALARI Bölme iģlemlerini yapınız. Doğruluğunu kontrol ediniz. 1 9 8 7 2 8 1 9 6 5 4 9 2 3-1 4 2 8 X 7 + 2 X + 5 8 1 9 6 1 9 8-5 6 2 6 1 8 1 8 7 0 9 1 3 2 5 5 1 5 6 2 2 2 2 2 5 4 1 6 7 0 1
TARİH: REVIZYON: 0 SAYFA : 1/7 ISPARTAKULE KOZA EVLERĠ-2 01 MAYIS MAYIS 2017 AYLIK FAALĠYET RAPORU
 SAYFA : 1/7 PROJE ADI KONU ve TARİH ISPARTAKULE KOZA EVLERĠ-2 01 MAYIS 2017 30 MAYIS 2017 AYLIK FAALĠYET RAPORU 1. GİRİŞ Ġstanbul ili, Avcılar Ġlçesi, Tahtakale Mahallesi Petunya Sokak üzerinde kurulu
SAYFA : 1/7 PROJE ADI KONU ve TARİH ISPARTAKULE KOZA EVLERĠ-2 01 MAYIS 2017 30 MAYIS 2017 AYLIK FAALĠYET RAPORU 1. GİRİŞ Ġstanbul ili, Avcılar Ġlçesi, Tahtakale Mahallesi Petunya Sokak üzerinde kurulu
Yüksek Enerjili Şekil Verme. Prof. Dr. Akgün ALSARAN
 Yüksek Enerjili Şekil Verme Prof. Dr. Akgün ALSARAN Yüksek enerjili şekil verme Şekillendirmede yüksek enerji düzeylerine ulaşabilmek için makine kütlelerini büyütmek yerine, hız değerlerinin yükseltilmesi
Yüksek Enerjili Şekil Verme Prof. Dr. Akgün ALSARAN Yüksek enerjili şekil verme Şekillendirmede yüksek enerji düzeylerine ulaşabilmek için makine kütlelerini büyütmek yerine, hız değerlerinin yükseltilmesi
OKG-240 TÜNEL TİPİ TEPSİLİ KURUTUCU EĞİTİM SETİ
 2014 OKG-240 TÜNEL TİPİ TEPSİLİ KURUTUCU EĞİTİM SETİ www.ogendidactic.com TÜNEL TİP TEPSİLİ KURUTUCU 1 GENEL ÖZELLİKLER Tünel tip tepsili kurutucular endüstriyel proseslerde oldukça sık kullanılan kurutma
2014 OKG-240 TÜNEL TİPİ TEPSİLİ KURUTUCU EĞİTİM SETİ www.ogendidactic.com TÜNEL TİP TEPSİLİ KURUTUCU 1 GENEL ÖZELLİKLER Tünel tip tepsili kurutucular endüstriyel proseslerde oldukça sık kullanılan kurutma