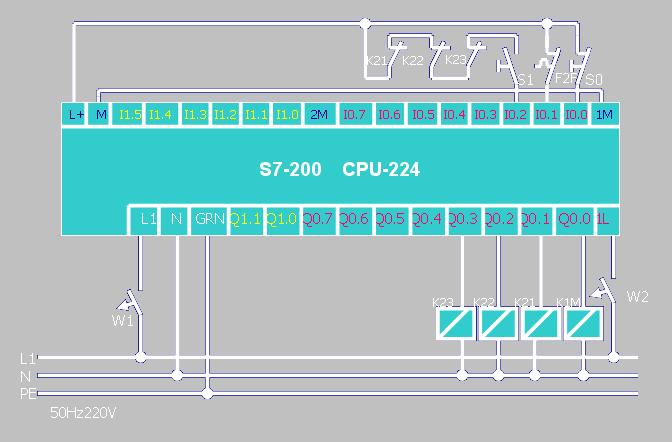
UYGULAMA 1 24V START CPU V LO. Verilen PLC bağlantısına göre; START butonuna basıldığında Q0.0 çıkışını aktif yapan PLC programını yazınız.
|
|
|
- Ekin Terzioğlu
- 6 yıl önce
- İzleme sayısı:
Transkript
1 UYGULAMA 1 24V 0V START I1.5 I1.4 I1.3 I1.2 I1,1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 CPU-224 Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 0V 24V LO Verilen PLC bağlantısına göre; START butonuna basıldığında Q0.0 çıkışını aktif yapan PLC programını yazınız.
2 CEVAP 1

3 UYGULAMA 2 STOP Verilen PLC bağlantısına göre; STOP butonuna basıldığında Q0.0 çıkışını pasif yapan PLC programını yazınız.
4 CEVAP 2
5 START STOP UYGULAMA 3 Verilen PLC bağlantısına göre; I0.0 butonuna basıldığında Q0.0 çıkışını aktif yapan, I0.1 butonuna basıldığında Q0.0 çıkışını pasif yapan PLC programını yazınız.
6 CEVAP 3
7 UYGULAMA 4 S5 S4 S3 S2 S1 S0 Verilen PLC bağlantısına göre; S0 aktif ve S1 pasif iken Q0.0 çıkışı aktif olsun S2 aktif ve S3 pasif iken Q0.1 çıkışı aktif olsun S4 aktif ve S6 pasif iken Q0.2 çıkışı aktif olsun PLC programını yazınız. (Aktif: Kontağın konum değiştirmesi Pasif: Kontağın konum değiştirmemesi) L2 L1 LO
8 CEVAP 4
9 UYGULAMA 5 L5 L4 L3 Verilen PLC bağlantısına göre; S0,S1 aktif ve S3,S4 pasif iken Q0.0 çıkışı aktif olsun S0 aktif ve S2, S3, S4, S5 pasif iken Q0.1 çıkışı aktif olsun S0, S1, S2 aktif ve S4 pasif iken Q0.2 çıkışı aktif olsun S3, S4, S5 aktif ve S0, S1, S2 pasif iken Q0.3 çıkışı aktif olsun S3 aktif ve S1, S2 pasif iken Q0.4 çıkışı aktif olsun S4, S1 aktif ve S2, S3 pasif iken Q0.5 çıkışı aktif olsun
10 CEVAP 5

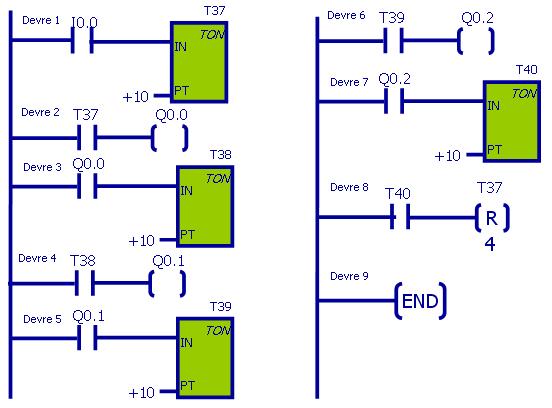
11 UYGULAMA 6 DEVRE 1 DEVRE 2 Acil durdurma istenilen yerlerde kullanılan röleli kumanda devresi. İki input aktif yapıldığında STOP öncelikli çalışır Alarm devrelerinde kullanılan röleli kumanda devresi. START öncelikli çalışır. Verilen Devre1 ve Devre2 deki röleli kumandaların PLC bağlantısını çiziniz ve gerekli programları yazınız.
12 START STOP CEVAP 6 L K Devre1 ve Devre2 röleli kumanda bağlantısının PLC bağlantı şekline çevrilmesi (ikisi birlikte verilmiştir)
13 UYGULAMA 7 Mühürlemenin başlayacağı bir bitlik adres yazılır Başlangıç adresi dâhil mühürlenecek adres adedi Resetlemenin başlayacağı bir bitlik adres yazılır Başlangıç adresi dâhil mühürlenecek adres adedi S1 S0 Verilen PLC bağlantısına göre; S0 anahtarına basıldığında Q0.0 ı set eden, S1 anahtarına basıldığında Q0.0 ı reset eden PLC programını yazınız.
14 CEVAP 7 Program RESET ağırlıklı olarak çalışır. END komutu okunduktan sonra tekrar baştan başlar.
15 UYGULAMA 8 Verilen PLC bağlantısına ve aşağıda istenilenlere göre PLC programını yazınız: S0 anahtarına basıldığında ilk 6 çıkış set olsun (Q0.0 - Q Q0.5) S1 anahtarına basıldığında ilk iki çıkış reset olsun (Q0.0 - Q0.1) S2 anahtarına basıldığında son üç çıkış reset olsun (Q0.3 - Q0.4 Q0.5) S3 anahtarına basıldığında tüm set olan çıkışlar resetlensin (Q0.0-Q Q0.5)
16 CEVAP 8

17 START STOP UYGULAMA 9 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; START butonuna basıldığında L0 yanacak START butonuna basılmadığında L1 yanacak STOP butonuna basıldığında L2 yanacak STOP butonuna basılmadığında L3 yanacak START butonuna bir defa basıldığında L0 sürekli yanacak.
18 CEVAP 9

19 START STOP S 1 S 2 UYGULAMA 10 M 2 M 1 S 1 I 0.2 S 2 I 0.3 İLERİ GERİ M 1 M 2 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; START butonuna basıldığında M1 motoru hemen çalışacak ve bant ileri olarak hareket etmeye başlayacaktır. Parça S1 e dokunduğunda bant duracak ve ters yönde hareket etmeye başlayacaktır. Parça S2 ye dokunduğunda tekrar durup ileri yönde çalışmaya başlayacaktır. Stop butonuna basıldığında çalışma duracaktır
20 CEVAP 10

21 START STOP S 2 S 3 S 4 S 5 S 6 S 7 UYGULAMA 11 M3B M2B M1B M3A M2A M1A Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Bir fabrikada bir proses için üç tane motor çalışmaktadır. Start butonuna basıldığında üç motor aynı anda çalışmaya başlayacaktır. Bu motorların her biri için birer tane yedek motor bulunmaktadır. Çalışan A motorlarının termiği attığında yedek B motorları kendiliğinden devreye girmelidir.
22 CEVAP 11 Devre 3 Q2.0 Devre 4 Q2.0

23 UYGULAMA 12 L1 L2 L3 3~50Hz 380V Yukarıda kısa devreli asenkron motorun iki yönde çalıştırılmasına ilişkin güç devresi verilmiştir. Bu devrenin PLC bağlantısını çiziniz ve PLC programını yazınız

24 CEVAP 12 Bu devrede S0 kuman da düğmesi durdurma, F2F motor aşırı akım rölesi normalde kapalı (NK) kontağı, S1 ve S2 motorun iki ayrı yönde çalıştırılması için kullanılan kumanda düğmeleridir. Şekildeki S0 durdurma düğmesi ve F2F aşırı akım rölesinin normalde kapalı kontakları üzerinden PLC I0.0 ve I0.1 girişlerine bağlanması daha güvenilir bir işletme özelliği sağlamak içindir. Aynı amaçla K1 kontaktörü bobini, PLC Q0.0 çıkışına K2 kontaktörünün NK kontağı üzerinden ve K1 kontaktörü bobini PLC Q0.1 çıkışına K1 kontaktörünün NK kontağı üzerinden bağlanır. Bunun nedeni, herhangi bir nedenle K1 ve K2 kontaktörlerinin aynı anda devrede olmasını önlemektedir. Programın yazılmasında, K1 ve K2 kontaktörlerine ilişkin koşullar ayrı ayrı göz önüne alınır. K1 kontaktörünün çalışmasına ilişkin lojik ifadenin elde edilmesi için gerekli koşullar şu şekilde ifade edilebilir: Eğer, S0 durdurma düğmesine basılmamış ve F2F aşırı akım rölesi uyarılmamış (motor aşırı yüklenmemiş) ve K2 kontaktörü devrede değilse (motor diğer yönde çalışmıyorsa), S1 başlatma düğmesine basıldığında K1 kontaktörü devreye girecek ve S1 düğmesi bırakıldığında da devrede kalacaktır.
25 Bu PLC programı bir sonraki şekildeki gibi de yazılabilir
: Girişe gelen sinyalle beraber saymaya başlar ve giriş 1 olduğu sürece saymaya devam eder.")

26 START UYGULAMA 13 ZAMANLAYICILAR 1.Timer On Delay (TON): Girişe gelen sinyalle beraber saymaya başlar ve giriş 1 olduğu sürece saymaya devam eder. Ayarlanan süre sonunda zamanlayıcı biti 1 olur. Giriş 0 a düştüğünde çıkışta 0 olur. 1ms 10ms 100ms T0, T32, T64, T96 T1-T4, T33-T36, T65-T68, T97-T100 T5-T31, T37-T63, T69-T95, T101-T255 RESETLEME SÜRESİ Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Start butonuna basıldıktan 8 sn sonra Q0.0 çıkışını aktif olsun.
27 CEVAP 13

28 START UYGULAMA 14 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; 2 sn aralıklarla Q0.0 ı flaşör yaptıran program
29 CEVAP 14 Uygulama 14 deki PLC programının iki şekilde yazılması aşağıda verilmiştir.

30 START STOP UYGULAMA 15 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız;
31 CEVAP 15

32 START STOP UYGULAMA 16 L2 L1 LO Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Üç adet lambanın 1sn aralıklarla flaşör şeklinde yanmasını sağlayan program
33 CEVAP 16

34 START STOP UYGULAMA 17 FS3 FS2 FS1 M2 M1 MO Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Yukarıda verilen bant düzeneğinde; Start butonuna basıldığında M! Motoru hemen çalışacak Herhangi bir anda Stop butonuna basıldığında program hemen duracak FS1 parça algıladıktan 2 sn sonra M2 motoru çalışacak FS2 parça algıladıktan 3 sn sonra M3 motoru çalışacak FS3 parça algılar algılamaz program hemen duracak
35 CEVAP 17
36 UYGULAMA 18 Yanda kısa devreli asenkron motora Y/Δ yol verme güç devresi verilmiştir. Bir sonraki şekilde ise kontaktörlü kontrol devresi verilmiştir. Bu devrenin PLC bağlantısını çiziniz ve PLC programını yazınız Y/Δ yol vermede, başlatma butonuna basıldığında motor önce Y bağlanarak devreye girer ve belirli bir süre sonra üçgen bağlanarak çalışmasını sürdürür.

37 CEVAP 18 K2 ve k3 kontaktörlerinin aynı anda devrede olmaması için K2 kontaktörü bobin devresine K3 kontaktörü NK kontağı ve K3 kontaktörü bobin devresine K2 kontaktörü NK kontağı seri olarak bağlanmıştır. Durdurma butonu S0 ve aşırı akım rölesi F2F durdurma işlevini yerine getirdiğinden PLC girişlerine normalde kapalı kontakları üzerinden bağlanmıştır.


38 UYGULAMA 19 Motor stator sargıları şebekeye bağlanmadan önce rotor devresindeki dirençler maksimum değerde tutulur. Motor yol almaya başladıktan sonra dirençler kademeli olarak kısa devre edilir. Böylece, maksimum yol alma momenti ile motorun hızlanması sağlanırken yol alma akımı sınırlandırılmış olur.
39 CEVAP 19


40 UYGULAMA 20 ZAMANLAYICILAR 2.Retentive On Delay Timer (TONR): Girişe gelen sinyalle beraber saymaya başlar ve giriş 1 olduğu sürece saymaya devam eder. Giriş 0 olursa içerik ve bit sıfırlanmaz. Mevcut değerini korur. İçerik ve biti sıfırlamanın tek yolu reset sinyalidir. 1ms T0, T64 10ms T1-T4, T65-T68 100ms T5-T31, T69-T95 KOŞUL SÜRE=8sn SÜRE Preset Time Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Start butonuna 2 sn aralıklarla basılmaktadır Q0.0 çıkışının 8 sn start butonu aktif olduğunda çıkışını değiştirmesini sağlayan program. Stop a basıldığında Q0.0 pasif olsun
41 CEVAP 20

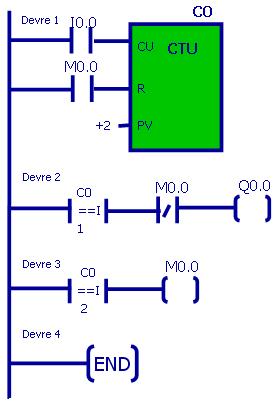
42 UYGULAMA 21 SAYICILAR 1. Yukarı Sayan Sayıcı (CTU): Sayıcı içeriği belirtilen karşılaştırma değerine ulaştığında ilgili biti 1 olur. Sınırsız sayıda sayıcı vardır. Sayıcı içeriği >=PV ise Sayıcı biti =1 olur. Her yükselen kenarda sayıcı içeriğini 1 arttırır 0~255 arası adres verilebilir Sayıcı içeriğini ve bitini sıfırlar Karşılaştırma değeri Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Start butonuna 3 defa basıldığında (3 yükselen kenar) Q0.0 ı aktif olsun Stop butonuna basıldığında sayıcıyı resetlensin.
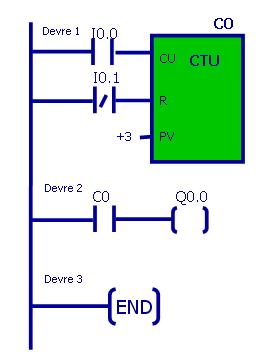
43 CEVAP 21

44 UYGULAMA 22 SAYICILAR 2. Aşağı-Yukarı Sayan Sayıcı (CTUD): PV değerine ulaşıldığında CTUD biti 1 olur. CTUD karşılaştırma değerini (-) olarak da yapar. PV değerine gelene kadar CTUD biti 1 olur. PV değerini geçtiğinde bit değeri 0 olur. CTUD içeriği ile aralığında değişir. Her yükselen kenar geldiğinde değeri bir azalır veya bir artar. Her yükselen kenarda sayıcı içeriğini 1 arttırır 0~255 arası adres verilebilir Sayıcı içeriğini ve bitini sıfırlar Sayıcı içeriğini ve bitini sıfırlar Karşılaştırma değeri PRESET VALUE Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; I0.0 yükselen kenarı geldiğinde C5 i bir arttıran, I0.1 yükselen kenarı geldiğinde C5 i bir azaltan; sayıcı değeri 5 e ulaştığında Q0.0 ı aktif yapan I0.2 reset geldiğinde sayıcı değeri sıfırlansın
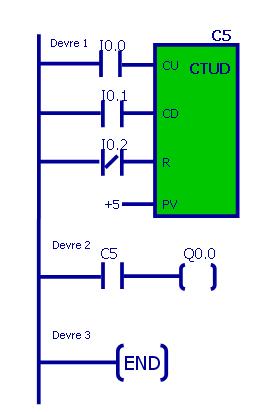
45 CEVAP 22
46 UYGULAMA 23 KARŞILAŞTIRMA ELEMANLARI Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Birinci yükselen kenarda 1 olacak, ikinci yükselen kenarda 0 olacak.
47 CEVAP 23
48 ÖZEL ÇEVRİM BİTLERİ

49 UYGULAMA 24 L5 L4 L3 L2 L1 L0 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız;
50 CEVAP 25

51 UYGULAMA 26 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız;
52 CEVAP 26


53 STOP FOTOSEL UYGULAMA 27 M4 M3 M2 B1 B0 FOTOSEL B1 B0 M2 M3 M4 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Start butonuna basıldığında B0 ve B1 bant motorları hemen çalışır Bant üzerinden geçen ürünler fotosel yardımıyla sayılmaktadır. Geçen ürün sayısı 2 olduğunda M2, 4 olduğunda M3 ve 6 olduğunda M4 çalışacaktır. Geçen ürün sayısı 8 olduğunda ise bütün motorlar durmalı ve sayaç resetlenmelidir.
54 CEVAP 27

55 STOP FS-1 FS-2 UYGULAMA 28 P1 M1 FS-1 FS-2 P1 M1 Verilen PLC bağlantısına göre aşağıdaki şartları sağlayan PLC programı yazınız; Pinpon topları onar onar paketlenecektir
56 CEVAP 28
UYGULAMA 1 SİEMENS S PLC UYGULAMALARI-2. Mühürleme Elemanları:
 Mühürleme Elemanları: UYGULAMA 1 Mühürlemenin başlayacağı bir bitlik adres yazılır S Başlangıç adresi dahil mühürlenecek adres adedi Resetlemenin başlayacağı bir bitlik adres yazılır R Başlangıç adresi
Mühürleme Elemanları: UYGULAMA 1 Mühürlemenin başlayacağı bir bitlik adres yazılır S Başlangıç adresi dahil mühürlenecek adres adedi Resetlemenin başlayacağı bir bitlik adres yazılır R Başlangıç adresi
ZAMANLAYICILAR S de, 4 farklı zamanlayıcı vardır.
 ZAMANLAYICILAR S7-1200 de, 4 farklı zamanlayıcı vardır. 1.Timer Pals: (TP): Girişe (IN) gelen sinyalle beraber çıkış (Q) «1» olur. Ayarlanan süre (PT) sonunda çıkış (Q) «0» olur. Ayarlanan süre (PT) dolmadan,
ZAMANLAYICILAR S7-1200 de, 4 farklı zamanlayıcı vardır. 1.Timer Pals: (TP): Girişe (IN) gelen sinyalle beraber çıkış (Q) «1» olur. Ayarlanan süre (PT) sonunda çıkış (Q) «0» olur. Ayarlanan süre (PT) dolmadan,
UYGULAMA 1 SİEMENS S PLC UYGULAMALARI CPU-1214C
 UYGULAMA 1 +24V 0V I1.5 I1.4 I1.3 I1.2 I1.1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 START CPU-1214C Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 +24V L0 0V Verilen PLC bağlantısına göre; START
UYGULAMA 1 +24V 0V I1.5 I1.4 I1.3 I1.2 I1.1 I1.0 I0.7 I0.6 I0.5 I0.4 I0.3 I0.2 I0.1 I0.0 START CPU-1214C Q1.1 Q1.0 Q0.7 Q0.6 Q0.5 Q0.4 Q0.3 Q0.2 Q0.1 Q0.0 +24V L0 0V Verilen PLC bağlantısına göre; START
SIEMENS LOGO KULLANIMI VE UYGULAMALAR
 SIEMENS LOGO KULLANIMI VE UYGULAMALAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 SIEMENS S7 200 UYGULAMALARI UYGULAMA _1 3 Fazlı Asenkron motorun iki yönde
SIEMENS LOGO KULLANIMI VE UYGULAMALAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 SIEMENS S7 200 UYGULAMALARI UYGULAMA _1 3 Fazlı Asenkron motorun iki yönde
OTOMASYON PROJELERİ VE UYGULAMALARI
 OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Nedir? Otomasyon u kısaca, bir işin insan ile makine arasında paylaşılması şeklinde tanımlayabiliriz. Bir otomasyon sisteminde toplam işin paylaşım yüzdesi
OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Nedir? Otomasyon u kısaca, bir işin insan ile makine arasında paylaşılması şeklinde tanımlayabiliriz. Bir otomasyon sisteminde toplam işin paylaşım yüzdesi
Şekil 4.12 : Klasik kumanda devresi. Ladder devresi : Network1. Network 2. Network 3 I0.0
 4.8 - Örnek problemler : Örnek 1 : Bir sistemde, 2 adet motor çalıştırılacaktır. Start butonuna ilk defa basıldığında sadece 1 nolu motor devreye girecek ve sürekli çalışacaktır. 1. motor çalışmaya başladıktan
4.8 - Örnek problemler : Örnek 1 : Bir sistemde, 2 adet motor çalıştırılacaktır. Start butonuna ilk defa basıldığında sadece 1 nolu motor devreye girecek ve sürekli çalışacaktır. 1. motor çalışmaya başladıktan
UYGULANMIŞ ÖRNEK PLC PROGRAMLARI
 UYGULANMIŞ ÖRNEK PLC PROGRAMLARI Örnek 1: Örneğ e başlamadan önce CPU yu 221 seçmeliyiz.(bu işlem program sonunda da yapılabilir.) Girişler I 0.0 dan I 0.5 e, Çıkışlar Q 0.0 dan Q 0.3 e kadardır. Amacı
UYGULANMIŞ ÖRNEK PLC PROGRAMLARI Örnek 1: Örneğ e başlamadan önce CPU yu 221 seçmeliyiz.(bu işlem program sonunda da yapılabilir.) Girişler I 0.0 dan I 0.5 e, Çıkışlar Q 0.0 dan Q 0.3 e kadardır. Amacı
OTOMASYON ATÖLYESİ TEMEL PLC SORULARI
 Soru1 ) Start butonuna bastığımız anda M1 motoru, start butonundan elimizi çektiğimiz anda M2 motoru çalışacak. Stop butonuna bastığımız anda ise iki motor birden duracaktır. M1 Q0.0 M2 Q0.1 OTOMASYON
Soru1 ) Start butonuna bastığımız anda M1 motoru, start butonundan elimizi çektiğimiz anda M2 motoru çalışacak. Stop butonuna bastığımız anda ise iki motor birden duracaktır. M1 Q0.0 M2 Q0.1 OTOMASYON
DELTA PLC DE ZAMANLAYICILAR
 DELTA PLC DE ZAMANLAYICILAR TMR Komutu TMR komutunun önündeki şart sinyal akışını sağladığında timer bobini saymaya başlar. Zaman dolduğunda, yani içerik >= ayar değeri (set değeri) olduğunda, adreslenen
DELTA PLC DE ZAMANLAYICILAR TMR Komutu TMR komutunun önündeki şart sinyal akışını sağladığında timer bobini saymaya başlar. Zaman dolduğunda, yani içerik >= ayar değeri (set değeri) olduğunda, adreslenen
BÖLÜM 12. n1 değeri n2 değerine eşit olduğu zaman kontak kapanır. Kontak kapandığında enerji akışı olur. n1 veya n2 değerleri maksimum 255 olabilir.
 BÖLÜM 2 KAŞILAŞTIMA KOMUTLAI (COMPAE INSTUCTION) Bayt (Byte) eşit karşılaştırma kontağı : ==B Operantlar : VB, IB, QB, MB, SMB, SB, AC, Sabit sayılar değeri değerine eşit olduğu zaman kontak kapanır. Kontak
BÖLÜM 2 KAŞILAŞTIMA KOMUTLAI (COMPAE INSTUCTION) Bayt (Byte) eşit karşılaştırma kontağı : ==B Operantlar : VB, IB, QB, MB, SMB, SB, AC, Sabit sayılar değeri değerine eşit olduğu zaman kontak kapanır. Kontak
BÖLÜM 13 ROTORU SARGILI VE ÇĐFT DEVĐRLĐ MOTORLARIN KUMANDASI. Örnek 1 : Üç kademeli dirençle rotoru sargılı motora yol vermenin programlanması.
 BÖLÜM 3 OOU AGILI VE ÇĐF DEVĐLĐ MOOLA KUMANDAI 3. - otoru sargılı motorların çalıştırılması : Örnek : Üç kademeli dirençle rotoru sargılı motora yol vermenin programlanması. e 2 C () C 4 () C 3 () C 2
BÖLÜM 3 OOU AGILI VE ÇĐF DEVĐLĐ MOOLA KUMANDAI 3. - otoru sargılı motorların çalıştırılması : Örnek : Üç kademeli dirençle rotoru sargılı motora yol vermenin programlanması. e 2 C () C 4 () C 3 () C 2
S71200 PLC UYGULAMA ÖRNEKLERİ
 S71200 PLC UYGULAMA ÖRNEKLERİ 1Örnek: Bir matbaacıda kitapların sayfa kenarlarındaki fazla kağıtları kesmek için bir giyotin makası kullanılacaktır. Bu makasın hareket etmesi çift taraflı pnömatik silindir
S71200 PLC UYGULAMA ÖRNEKLERİ 1Örnek: Bir matbaacıda kitapların sayfa kenarlarındaki fazla kağıtları kesmek için bir giyotin makası kullanılacaktır. Bu makasın hareket etmesi çift taraflı pnömatik silindir
BÖLÜM 5 S_BĐT. Komut listesi (STL) Network 1 LD I0.0 S Q0.0, 1
 Network 1 LD I0.0 S Q0.0, 1") BÖLÜM 5 ET VE EET ÖLELEĐ : PLC teknolojisinde sürekli çalışmayı sağlamak için mühürleme (kilitleme) pek kullanılmaz. ürekli çalışma başka bir yöntemle çözülür. Bu da ET ve EET tekniğidir. Çıkışın girişe
BÖLÜM 5 ET VE EET ÖLELEĐ : PLC teknolojisinde sürekli çalışmayı sağlamak için mühürleme (kilitleme) pek kullanılmaz. ürekli çalışma başka bir yöntemle çözülür. Bu da ET ve EET tekniğidir. Çıkışın girişe
TEKNOLOJİ FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ENDÜSTRİYEL TASARIMDA MODERN KONTROL TEKNİKLERİ PROGRAMLANABİLİR LOJİK DENETLEYİCİLER DENEY FÖYÜ
 TEKNOLOJİ FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ENDÜSTRİYEL TASARIMDA MODERN KONTROL TEKNİKLERİ PROGRAMLANABİLİR LOJİK DENETLEYİCİLER DENEY FÖYÜ 1 DENEY NO : 1 DENEYİN ADI : Start Stop Kullanılarak
TEKNOLOJİ FAKÜLTESİ ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ ENDÜSTRİYEL TASARIMDA MODERN KONTROL TEKNİKLERİ PROGRAMLANABİLİR LOJİK DENETLEYİCİLER DENEY FÖYÜ 1 DENEY NO : 1 DENEYİN ADI : Start Stop Kullanılarak
AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören
 04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
04.12.2011 AA Motorlarında Yol Verme, Motor Seçimi Yrd. Doç. Dr. Aytaç Gören İçerik AA Motorlarının Kumanda Teknikleri Kumanda Elemanları na Yol Verme Uygulama Soruları 25.11.2011 2 http://people.deu.edu.tr/aytac.goren
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİKFAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI
 ERCİYES ÜNİVERSİTESİ MÜHENDİSLİKFAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI KONTROL KUMANDA ELEMANLARI DENEYİ DERSİN ÖĞRETİM ÜYESİ DENEYİ
ERCİYES ÜNİVERSİTESİ MÜHENDİSLİKFAKÜLTESİ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ BÖLÜMÜ ENERJİ SİSTEMLERİ MÜHENDİSLİĞİ LABORATUARI DENEY FÖYÜ DENEY ADI KONTROL KUMANDA ELEMANLARI DENEYİ DERSİN ÖĞRETİM ÜYESİ DENEYİ
BÖLÜM 1. ASENKRON MOTORLAR
 İÇİNDEKİLER ÖNSÖZ...iv GİRİŞ...v BÖLÜM 1. ASENKRON MOTORLAR 1. ASENKRON MOTORLAR... 1 1.1. Üç Fazlı Asenkron Motorlar... 1 1.1.1. Üç fazlı asenkron motorda üretilen tork... 2 1.1.2. Üç fazlı asenkron motorlara
İÇİNDEKİLER ÖNSÖZ...iv GİRİŞ...v BÖLÜM 1. ASENKRON MOTORLAR 1. ASENKRON MOTORLAR... 1 1.1. Üç Fazlı Asenkron Motorlar... 1 1.1.1. Üç fazlı asenkron motorda üretilen tork... 2 1.1.2. Üç fazlı asenkron motorlara
ELK432-MİKROBİLGİSAYARLI SİSTEM TASARIMI LABORATUAR DENEY FÖYÜ
 ELK432-MİKROBİLGİSAYARLI SİSTEM TASARIMI LABORATUAR DENEY FÖYÜ İÇİNDEKİLER 1. ASENKRON MOTORA YOLVERME YÖNTEMLERİ 2. ASENKRON MOTORA YILDIZ ÜÇGEN YOLVERME 3. OTOMATİK GİRİŞ KAPISININ PLC ÜZERİNDEN KONTROLU
ELK432-MİKROBİLGİSAYARLI SİSTEM TASARIMI LABORATUAR DENEY FÖYÜ İÇİNDEKİLER 1. ASENKRON MOTORA YOLVERME YÖNTEMLERİ 2. ASENKRON MOTORA YILDIZ ÜÇGEN YOLVERME 3. OTOMATİK GİRİŞ KAPISININ PLC ÜZERİNDEN KONTROLU
Elektrik. Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları
 Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
Elektrik Alternatif Akım Motorlarının Kumanda Teknikleri Kumanda Elemanları 24.12.2013 Dr. Levent Çetin 2 24.12.2013 Dr. Levent Çetin 3 Buton/Anahtar / Limit Anahtarı Kalıcı butona basıldığında, buton
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi):
:") KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
KUMANDA DEVRELERİ Örnek 1: Stop öncelikli Start Stop Devresi (Klasik Mühürleme Devresi): START butonuna basıldığında M kontaktörü enerjilenir, M kontaktörünün normalde açık (NO) kontakları kapanır ve motor
ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME
 ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME Şekil - 1 Şekilde üç fazlı asenkron motora buton ve kontaktörle yol veren devre görülmektedir. Devrede start butonuna basıldığında K 1 kontaktörünün
ÜÇ FAZLI ASENKRON MOTORLARA BUTON VE KONTAKTÖRLE YOL VERME Şekil - 1 Şekilde üç fazlı asenkron motora buton ve kontaktörle yol veren devre görülmektedir. Devrede start butonuna basıldığında K 1 kontaktörünün
Elektromekanik Kumanda Sistemleri / Örnek Uygulamalar
 PROBLEM 31: Uzaktan kumandalı, kesik kesik çalıştırılabilen, devir yönü değiştirilebilen, otomatik λ / yol alan, bir asenkron motorun dinamik frenlenme ile durdurulması ile ilgili güç ve kumanda devresini
PROBLEM 31: Uzaktan kumandalı, kesik kesik çalıştırılabilen, devir yönü değiştirilebilen, otomatik λ / yol alan, bir asenkron motorun dinamik frenlenme ile durdurulması ile ilgili güç ve kumanda devresini
ELEKTROMEKANİK KUMANDA SİSTEMLERİ ÖRNEK UYGULAMALAR
 ELEKTROMEKANİK KUMANDA SİSTEMLERİ ÖRNEK UYGULAMALAR PROBLEM 1: 3 Fazlı Bir Asenkron Motoru Kesik Kesik Çalıştırmak Çalışma Şekli : Kumanda devresindeki start butonuna basıldığında M kontaktörünün bobinine
ELEKTROMEKANİK KUMANDA SİSTEMLERİ ÖRNEK UYGULAMALAR PROBLEM 1: 3 Fazlı Bir Asenkron Motoru Kesik Kesik Çalıştırmak Çalışma Şekli : Kumanda devresindeki start butonuna basıldığında M kontaktörünün bobinine
Trafik Işık Kontrolü
 Trafik Işık Kontrolü TUNCELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK - ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ OTOMASYON LABORATUVARI DENEY NO:2 1. Zamanlayıcılar PLC bünyesinde bulunan zamanlayıcılar klasik
Trafik Işık Kontrolü TUNCELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK - ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ OTOMASYON LABORATUVARI DENEY NO:2 1. Zamanlayıcılar PLC bünyesinde bulunan zamanlayıcılar klasik
ELEKTRİK MAKİNALARI VE KUMANDA 4.1.ASENKRON MOTORLARA DİREKT YOL VERME VE DEVRE ŞEMALARI
 BÖLÜM 4 OTOMATİK KUMANDA DEVRELERİ 4.1.ASENKRON MOTORLARA DİREKT YOL VERME VE DEVRE ŞEMALARI Basitliği, dayanıklılığı ve ekonomik olmasından endüstride en çok kullanılan asenkron motora, gücüne, işletme
BÖLÜM 4 OTOMATİK KUMANDA DEVRELERİ 4.1.ASENKRON MOTORLARA DİREKT YOL VERME VE DEVRE ŞEMALARI Basitliği, dayanıklılığı ve ekonomik olmasından endüstride en çok kullanılan asenkron motora, gücüne, işletme
LD S0 IF (S0=TRUE AND S1=TRUE AND S2=TRUE) THEN AND S1 Q0:=TRUE; AND S2 ELSE ST Q0 Q0:=FALSE; END_IF;
 THEN AND S1 Q0:=TRUE; AND S2 ELSE ST Q0 Q0:=FALSE; END_IF;") KOMUT LİESİ ve YAPISAL METİN ile PROGRAMLAMA IF (=TRUE =TRUE =TRUE THEN Q0:=TRUE; Q0 Q0:=FALSE; N IF (=FALSE =FALSE =FALSE THEN Q0:=TRUE; Q0 Q0:=FALSE; IF (=TRUE =TRUE =TRUE THEN Q1:=TRUE; Q1 Q1:=FALSE;
KOMUT LİESİ ve YAPISAL METİN ile PROGRAMLAMA IF (=TRUE =TRUE =TRUE THEN Q0:=TRUE; Q0 Q0:=FALSE; N IF (=FALSE =FALSE =FALSE THEN Q0:=TRUE; Q0 Q0:=FALSE; IF (=TRUE =TRUE =TRUE THEN Q1:=TRUE; Q1 Q1:=FALSE;
SAYICILAR. Tetikleme işaretlerinin Sayma yönüne göre Sayma kodlanmasına göre uygulanışına göre. Şekil 52. Sayıcıların Sınıflandırılması
 25. Sayıcı Devreleri Giriş darbelerine bağlı olarak belirli bir durum dizisini tekrarlayan lojik devreler, sayıcı olarak adlandırılır. Çok değişik alanlarda kullanılan sayıcı devreleri, FF lerin uygun
25. Sayıcı Devreleri Giriş darbelerine bağlı olarak belirli bir durum dizisini tekrarlayan lojik devreler, sayıcı olarak adlandırılır. Çok değişik alanlarda kullanılan sayıcı devreleri, FF lerin uygun
Selçuk Üniversitesi Teknoloji Fakültesi. Endüstriyel Otomasyon Laboratuvarı Deney Föyü
 Selçuk Üniversitesi Teknoloji Fakültesi Endüstriyel Otomasyon Laboratuvarı Deney Föyü Arş. Gör. Hasan Hüseyin Çevik 2018 DENEY NO:1 CIMON PLC SETİ TANITIMI VE PROGRAMLAMAYA GİRİŞ Deneylerde CİMON PLC XP-CP
Selçuk Üniversitesi Teknoloji Fakültesi Endüstriyel Otomasyon Laboratuvarı Deney Föyü Arş. Gör. Hasan Hüseyin Çevik 2018 DENEY NO:1 CIMON PLC SETİ TANITIMI VE PROGRAMLAMAYA GİRİŞ Deneylerde CİMON PLC XP-CP
Elektromekanik Kumanda Sistemleri / Ders Notları
 10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
10. MOTORLARIN FRENLENMESİ Durdurulacak motoru daha kısa sürede durdurmada veya yükün yer çekimi nedeniyle motor devrinin artmasına sebep olduğu durumlarda elektriksel frenleme yapılır. Kumanda devrelerinde
Elektromekanik Kumanda Sistemleri / Ders Notları
 İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
İkincisinde ise; stator düşük devir kutup sayısına göre sarılır ve her faz bobinleri 2 gruba bölünerek düşük devirde seri- üçgen olarak bağlanır. Yüksek devirde ise paralel- yıldız olarak bağlanır. Bu
L3 Otomasyon Laboratuvarı
 L3 Laboratuvarı Otomasyon laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Elektrik makinelerinin yapısı, bakımı, kontrolü ve endüstriyel uygulama alanlarını öğrenir. Enerji
L3 Laboratuvarı Otomasyon laboratuvarı olarak kullanılmaktadır. Bu laboratuvarda ders alan öğrencilerimiz; Elektrik makinelerinin yapısı, bakımı, kontrolü ve endüstriyel uygulama alanlarını öğrenir. Enerji
ASENKRON MOTORLARI FRENLEME METODLARI
 DENEY-7 ASENKRON MOTORLARI FRENLEME METODLARI Frenlemenin tanımı ve çeşitleri Motorların enerjisi kesildikten sonra rotorun kendi ataletinden dolayı bir süre daha dönüşünü sürdürür. Yani motorun durması
DENEY-7 ASENKRON MOTORLARI FRENLEME METODLARI Frenlemenin tanımı ve çeşitleri Motorların enerjisi kesildikten sonra rotorun kendi ataletinden dolayı bir süre daha dönüşünü sürdürür. Yani motorun durması
TEMEL SEVİYE PLC EĞİTİM NOTLARI
 F.A.S.T. TEMEL SEVİYE PLC EĞİTİM NOTLARI İÇİNDEKİLER BÖLÜM 1 : PLC TANIMI, GİRİŞ / ÇIKIŞ BAĞLANTILARI, BİT ve DATA ADRESLEMELERİ BÖLÜM 2 : DİJİTAL ÇIKIŞ IN ÇALIŞMASI ve KESİLMESİ UYGULAMALARI BÖLÜM 3 :
F.A.S.T. TEMEL SEVİYE PLC EĞİTİM NOTLARI İÇİNDEKİLER BÖLÜM 1 : PLC TANIMI, GİRİŞ / ÇIKIŞ BAĞLANTILARI, BİT ve DATA ADRESLEMELERİ BÖLÜM 2 : DİJİTAL ÇIKIŞ IN ÇALIŞMASI ve KESİLMESİ UYGULAMALARI BÖLÜM 3 :
Deney 3: Asenkron Sayıcılar
 Deney 3: Asenkron Sayıcılar Sayıcılar hakkında genel bilgi sahibi olunması, asenkron sayıcıların kurulması ve incelenmesi Kullanılan Elemanlar 1xLM555 Entegresi, 1x10 kohm direnç, 1x100 kohm direnç, 1x10
Deney 3: Asenkron Sayıcılar Sayıcılar hakkında genel bilgi sahibi olunması, asenkron sayıcıların kurulması ve incelenmesi Kullanılan Elemanlar 1xLM555 Entegresi, 1x10 kohm direnç, 1x100 kohm direnç, 1x10
Semboller : :Açma kapama alteri :Ate leme butonu :Yardımcı röle :Merkez kontak :Normalde açık kontak :Normalde kapalı kontak :UV.
 ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
TC. MARMARA ÜNİVERSİTESİ
 TC. MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ EĞİTİMİ BÖLÜMÜ PLC OTOMASYON RAPORU PROBLEM :... İSİM :... SINIF/ŞUBE :... NO :... 28) ELMA KUTULAMA OTOMASYONU ŞekilX1. Elma Kutulama Otomasyonu 1)PROBLEM:
TC. MARMARA ÜNİVERSİTESİ TEKNİK EĞİTİM FAKÜLTESİ EĞİTİMİ BÖLÜMÜ PLC OTOMASYON RAPORU PROBLEM :... İSİM :... SINIF/ŞUBE :... NO :... 28) ELMA KUTULAMA OTOMASYONU ŞekilX1. Elma Kutulama Otomasyonu 1)PROBLEM:
BÖLÜM 9 (COUNTERS) SAYICILAR SAYISAL ELEKTRONİK. Bu bölümde aşağıdaki konular anlatılacaktır
 SAYICILAR SAYISAL ELEKTRONİK. Bu bölümde aşağıdaki konular anlatılacaktır") SYISL ELETRONİ ÖLÜM 9 (OUNTERS) SYIILR u bölümde aşağıdaki konular anlatılacaktır Sayıcılarda Mod kavramı senkron sayıcılar senkron yukarı sayıcı (Up counter) senkron aşağı sayıcı (Down counter) senkron
SYISL ELETRONİ ÖLÜM 9 (OUNTERS) SYIILR u bölümde aşağıdaki konular anlatılacaktır Sayıcılarda Mod kavramı senkron sayıcılar senkron yukarı sayıcı (Up counter) senkron aşağı sayıcı (Down counter) senkron
Programlamada Kullanılan Temel Parametreler
 TECO PLC: Programlamada Kullanılan Temel Parametreler X; PLC nin fiziksel giriş adresleri Y; PLC nin fiziksel giriş adresleri D; PLC nin veri adresleri T; PLC nin zaman rölesi ardesleri C; PLC nin sayıcı
TECO PLC: Programlamada Kullanılan Temel Parametreler X; PLC nin fiziksel giriş adresleri Y; PLC nin fiziksel giriş adresleri D; PLC nin veri adresleri T; PLC nin zaman rölesi ardesleri C; PLC nin sayıcı
K10S1 PLC`si içerisindeki zamanlama bilgilerinin T zamanlayıcı rölelerinde tutulduğunu daha once anlatmıştık. T zamanlayıcı röleleri kullanıcının
 Zamanlayıcılar 1 K10S1 PLC`si içerisindeki zamanlama bilgilerinin T zamanlayıcı rölelerinde tutulduğunu daha once anlatmıştık. T zamanlayıcı röleleri kullanıcının belirlediği zaman süresi değerine kadar
Zamanlayıcılar 1 K10S1 PLC`si içerisindeki zamanlama bilgilerinin T zamanlayıcı rölelerinde tutulduğunu daha once anlatmıştık. T zamanlayıcı röleleri kullanıcının belirlediği zaman süresi değerine kadar
TEKNOLOJĠ FAKÜLTESĠ ELEKTRĠK ELEKTRONĠK MÜHENDĠSLĠĞĠ PROGRAMLANABĠLĠR LOJĠK DENETLEYĠCĠLER DENEY FÖYÜ
 TEKNOLOJĠ FAKÜLTESĠ ELEKTRĠK ELEKTRONĠK MÜHENDĠSLĠĞĠ PROGRAMLANABĠLĠR LOJĠK DENETLEYĠCĠLER DENEY FÖYÜ 1 DENEY NO : 1 DENEYĠN ADI : Start Stop Kullanılarak Motorun Sürekli Çalıştırılması Deneyin Amacı:
TEKNOLOJĠ FAKÜLTESĠ ELEKTRĠK ELEKTRONĠK MÜHENDĠSLĠĞĠ PROGRAMLANABĠLĠR LOJĠK DENETLEYĠCĠLER DENEY FÖYÜ 1 DENEY NO : 1 DENEYĠN ADI : Start Stop Kullanılarak Motorun Sürekli Çalıştırılması Deneyin Amacı:
MOTOR KORUMA RÖLELERİ. Motorların şebekeden aşırı akım çekme nedenleri
 MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
MOTOR KORUMA RÖLELERİ Motorlar herhangi bir nedenle normal değerlerinin üzerinde akım çektiğinde sargılarının ve devre elemanlarının zarar görmemesi için en kısa sürede enerjilerinin kesilmesi gerekir.
Çok sayıda motor şekilde gibi sadece bir durumunda başlatma kontrol merkezi ile otomatik olarak çalıştırılabilir.
 7.1.4 Paket Şalter İle Bu devredeki DG düşük gerilim rölesi düşük gerilime karşı koruma yapar. Yani şebeke gerilimi kesilir ve tekrar gelirse motorun çalışmasına engel olur. 7.2 SIRALI KONTROL Sıralı kontrol,
7.1.4 Paket Şalter İle Bu devredeki DG düşük gerilim rölesi düşük gerilime karşı koruma yapar. Yani şebeke gerilimi kesilir ve tekrar gelirse motorun çalışmasına engel olur. 7.2 SIRALI KONTROL Sıralı kontrol,
Fatih Üniversitesi. İstanbul. Haziran 2010. Bu eğitim dokümanlarının hazırlanmasında SIEMENS ve TEKO eğitim dokümanlarından faydalanılmıştır.
 Fatih Üniversitesi SIMATIC S7-200 TEMEL KUMANDA UYGULAMALARI 1 İstanbul Haziran 2010 Bu eğitim dokümanlarının hazırlanmasında SIEMENS ve TEKO eğitim dokümanlarından faydalanılmıştır. İÇİNDEKİLER 1. GİRİŞ...
Fatih Üniversitesi SIMATIC S7-200 TEMEL KUMANDA UYGULAMALARI 1 İstanbul Haziran 2010 Bu eğitim dokümanlarının hazırlanmasında SIEMENS ve TEKO eğitim dokümanlarından faydalanılmıştır. İÇİNDEKİLER 1. GİRİŞ...
BÖLÜM 9. Say c lar, S7 200 CPU serilerinde C ile gösterilir.
 BÖLÜM 9 SAYICILA ( Counters) ( C ) Say c lar, giri ine verilen ve 0 sinyalinin belirli say s ndan sonra ç k n yapan elemanlard r. Sayma i lemi yukar olabildi i gibi a a da olabilir. Say c lar, batarya
BÖLÜM 9 SAYICILA ( Counters) ( C ) Say c lar, giri ine verilen ve 0 sinyalinin belirli say s ndan sonra ç k n yapan elemanlard r. Sayma i lemi yukar olabildi i gibi a a da olabilir. Say c lar, batarya
PLC DERS SUNUSU. Prof. Dr. İlhan KOCAARSLAN
 PLC DERS SUNUSU Prof. Dr. İlhan KOCAARSLAN İÇERİK Giriş PLC nedir? PLC lerin Uygulama Alanları PLC lerin Yapısı PLC lerin Avantajları PLC ile Elde Edilen Verilerin Değerlendirilmesi PLC Verilerine Internet
PLC DERS SUNUSU Prof. Dr. İlhan KOCAARSLAN İÇERİK Giriş PLC nedir? PLC lerin Uygulama Alanları PLC lerin Yapısı PLC lerin Avantajları PLC ile Elde Edilen Verilerin Değerlendirilmesi PLC Verilerine Internet
PROGRAMLANAB L R DENETLEY C LER. DERS 06 Temel Programlama Komutları
 PROGRAMLANAB L R DENETLEY C LER DERS 06 Temel Programlama Komutları 2.8. Temel Programlama Komutları 2.8.1. Start, Stop ve Çıkı lar Klasik kumanda devrelerinde sistemin çalı masını ba latmak ve durdurmak
PROGRAMLANAB L R DENETLEY C LER DERS 06 Temel Programlama Komutları 2.8. Temel Programlama Komutları 2.8.1. Start, Stop ve Çıkı lar Klasik kumanda devrelerinde sistemin çalı masını ba latmak ve durdurmak
1. Sayıcıların çalışma prensiplerini ve JK flip-floplarla nasıl gerçekleştirileceğini anlamak. 2. Asenkron ve senkron sayıcıları incelemek.
 DENEY 7-2 Sayıcılar DENEYİN AMACI 1. Sayıcıların çalışma prensiplerini ve JK flip-floplarla nasıl gerçekleştirileceğini anlamak. 2. Asenkron ve senkron sayıcıları incelemek. GENEL BİLGİLER Sayıcılar, flip-floplar
DENEY 7-2 Sayıcılar DENEYİN AMACI 1. Sayıcıların çalışma prensiplerini ve JK flip-floplarla nasıl gerçekleştirileceğini anlamak. 2. Asenkron ve senkron sayıcıları incelemek. GENEL BİLGİLER Sayıcılar, flip-floplar
3. Çok kontaklı, tek konumlu röleler 2. Tek kontaklı, çift konumlu röleler
 Mekatronik Mühendisliği DENEY-1: Röle Yük Sürülmesi ve Sürekli Çalışma (Mühürleme) Ön Bilgi: Ø Butonlar Butona basıldığında kontakları konum değiştirir, üzerinden basınç kaldırıldığında yay aracılığı ile
Mekatronik Mühendisliği DENEY-1: Röle Yük Sürülmesi ve Sürekli Çalışma (Mühürleme) Ön Bilgi: Ø Butonlar Butona basıldığında kontakları konum değiştirir, üzerinden basınç kaldırıldığında yay aracılığı ile
C-Serisi PLC İleri Seviye Eğitim
 C-Serisi PLC İleri Seviye Eğitim 1 PLC ye Giriş 2 PLC ye Giriş 3 PLC ye Giriş CJ1 I/O Modülleri - 8/16/32/64pts Max I/O - 160,640 Max Program Kapasitesi - 20K Steps Komut sayısı - 400 4 PLC Ladder Diyagram
C-Serisi PLC İleri Seviye Eğitim 1 PLC ye Giriş 2 PLC ye Giriş 3 PLC ye Giriş CJ1 I/O Modülleri - 8/16/32/64pts Max I/O - 160,640 Max Program Kapasitesi - 20K Steps Komut sayısı - 400 4 PLC Ladder Diyagram
Bilezikli Asenkron Motora Yol Verilmesi
 Bilezikli Asenkron Motora Yol Verilmesi 1. GİRİŞ Bilezikli asenkron motor, sincap kafesli asenkron motordan farklı olarak, rotor sargıları dışarı çıkarılmış ve kömür fırçaları yardımıyla elektriksel bağlantı
Bilezikli Asenkron Motora Yol Verilmesi 1. GİRİŞ Bilezikli asenkron motor, sincap kafesli asenkron motordan farklı olarak, rotor sargıları dışarı çıkarılmış ve kömür fırçaları yardımıyla elektriksel bağlantı
SBAR HIZLI KULLANIM KILAVUZU
 SBAR HIZLI KULLANIM KILAVUZU ELEKTRİKSEL BAĞLANTI Bağlantılar Giriş Voltaj kablosu Fotosel Kablousu Buton Kablosu Kablo Tipi 3x 1,5 mm² 2x 0,5 mm² 4x 0,25 mm² Maksimum Kablo Boyutu 30 m Daha uzun mesafe
SBAR HIZLI KULLANIM KILAVUZU ELEKTRİKSEL BAĞLANTI Bağlantılar Giriş Voltaj kablosu Fotosel Kablousu Buton Kablosu Kablo Tipi 3x 1,5 mm² 2x 0,5 mm² 4x 0,25 mm² Maksimum Kablo Boyutu 30 m Daha uzun mesafe
ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ LOJİK ENTEGRELERLE TEMEL KUMANDA DEVRELERİ 522EE0258 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK-ELEKTRONİK TEKNOLOJİSİ LOJİK ENTEGRELERLE TEMEL KUMANDA DEVRELERİ 522EE0258 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim
BÖLÜM 9. Sayıcılar, S7 200 CPU 212...226 serilerinde C ile gösterilir. Sayıcılar, S7 200 CPU 212...226 serilerinde: Yukarı sayıcı (Counter up CTU ),
,") BÖLÜM 9 SAYICILA ( Counters) ( C ) Sayıcılar, girişine verilen ve 0 sinyalinin belirli sayısından sonra çıkışını yapan elemanlardır Sayma işlemi yukarı olabildiği gibi aşağı da olabilir Sayıcılar, batarya
BÖLÜM 9 SAYICILA ( Counters) ( C ) Sayıcılar, girişine verilen ve 0 sinyalinin belirli sayısından sonra çıkışını yapan elemanlardır Sayma işlemi yukarı olabildiği gibi aşağı da olabilir Sayıcılar, batarya
Röle Ters röle Set rölesi Reset rölesi
 DENEY-5 PLC İLE KESİK VE SÜREKLİ ÇALIŞMA Ön Bilgi: Kesik çalışma: Sistemin butona basıldığı sürece çalışması, buton bırakılınca durması o sistemin kesik çalıştığını gösterir. Sürekli çalışma: Sistemin
DENEY-5 PLC İLE KESİK VE SÜREKLİ ÇALIŞMA Ön Bilgi: Kesik çalışma: Sistemin butona basıldığı sürece çalışması, buton bırakılınca durması o sistemin kesik çalıştığını gösterir. Sürekli çalışma: Sistemin
1969 yılında, klasik (Elektrik) kumandanın. Elektronik karşılığı olan ilk PLC yapıldı yılında ise dört yıllık bir çalımanın ürünü
 kumandanın. Elektronik karşılığı olan ilk PLC yapıldı yılında ise dört yıllık bir çalımanın ürünü") 1. PLC`nin Tarihcesi 1960 yılında yüksek verimlilik, güvenilirlik ve yeni devreler gibi üstünlükleri ile birlikte bilgisayarlar kullanılmaya başlandı. Buda beraberinde endüstriyel üretimde otomasyonu ortaya
1. PLC`nin Tarihcesi 1960 yılında yüksek verimlilik, güvenilirlik ve yeni devreler gibi üstünlükleri ile birlikte bilgisayarlar kullanılmaya başlandı. Buda beraberinde endüstriyel üretimde otomasyonu ortaya
T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ
 ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ") T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ PLC YE HAZIRLIK MODÜLÜ ANKARA 2007 Milli Eğitim Bakanlığı tarafından
T.C. MİLLİ EĞİTİM BAKANLIĞI MEGEP (MESLEKİ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ) ENDÜSTRİYEL OTOMASYON TEKNOLOJİLERİ PLC YE HAZIRLIK MODÜLÜ ANKARA 2007 Milli Eğitim Bakanlığı tarafından
SAYICILAR (COUNTERS) Codesys dilinde üç tip sayıcı bulunmaktadır. Bunlar; CTU : YUKARI (İLERİ) SAYICI (UP COUNTER)
 Codesys dilinde üç tip sayıcı bulunmaktadır. Bunlar; CTU : YUKARI (İLERİ) SAYICI (UP COUNTER)") Örnek: Bir kapasitif sensör ile yürüyen banttaki cam şişelerin sayma işlemi yapılmaktadır. Şişe sayısı 12 olduğu zaman Paketleme işlemi başlatılmaktadır. Paketleme işlemi 1dk sürmekte ve işlem sonunda
Örnek: Bir kapasitif sensör ile yürüyen banttaki cam şişelerin sayma işlemi yapılmaktadır. Şişe sayısı 12 olduğu zaman Paketleme işlemi başlatılmaktadır. Paketleme işlemi 1dk sürmekte ve işlem sonunda
OTOMATİK KAPI KONTROL CİHAZI
 OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
OTOMATİK KAPI KONTROL CİHAZI EKONT Otomatik kapı kontrol cihaz her türlü tam otomatik kapı otomasyonu uygulamalarında kullanılmak üzere tasarlanmış, çok fonksiyonelli ve her türlü güvenlik önlemleri düşünülmüş
BÖLÜM 8. Timer On. TON zaman rölelerinde IN giri ine gelen sinyal 0 olursa, sayma de eri s f rlan r ve zaman rölesi ç k 1 ise ç k da s f rlan r.
 BÖLÜM 8 ZAMAN RÖLELER (ZAMANLAYICILAR) : PLC içersinde bulunan zaman röleleri genellikle klasik kumanda sistemlerindeki zaman röleleri gibi görev yaparlar. PLC de ancak klasik zaman rölelerinin d nda farkl
BÖLÜM 8 ZAMAN RÖLELER (ZAMANLAYICILAR) : PLC içersinde bulunan zaman röleleri genellikle klasik kumanda sistemlerindeki zaman röleleri gibi görev yaparlar. PLC de ancak klasik zaman rölelerinin d nda farkl
NİCE TURKİYE. ROBUS 600-1000 Hızlı Kullanma Kılavuzu ELEKTRİKSEL BAĞLANTI
 ELEKTRİKSEL BAĞLANTI ROBUS 600-1000 Hızlı Kullanma Kılavuzu Bağlantı yapılmayan hiçbir yere köprüleme yapmanıza gerek yok. Bağlantilarınızda Nice marka ürünleri kullanmanızda fayda vardır. SMX2 Bağlantısı
ELEKTRİKSEL BAĞLANTI ROBUS 600-1000 Hızlı Kullanma Kılavuzu Bağlantı yapılmayan hiçbir yere köprüleme yapmanıza gerek yok. Bağlantilarınızda Nice marka ürünleri kullanmanızda fayda vardır. SMX2 Bağlantısı
6. ENVERSÖR PAKET ŞALTER
 6. ENVERSÖR PAKET ŞALTER Küçük güçlü motorlarda devir yönü değiştirme genellikle, buton ve kontaktör yerine paket şalterle veya kollu şalterle yapılmaktadır. Daha çok ekonomik olmaları nedeniyle tercih
6. ENVERSÖR PAKET ŞALTER Küçük güçlü motorlarda devir yönü değiştirme genellikle, buton ve kontaktör yerine paket şalterle veya kollu şalterle yapılmaktadır. Daha çok ekonomik olmaları nedeniyle tercih
SIGNO BARİYER BAĞLANTI ŞEMASI
 SIGNO BARİYER BAĞLANTI ŞEMASI Mekanik Montaj 1) Bariyerle gelen malzemeleri resim 1 de görüldüğü gibi kontrol edin. 2) Bariyerin kolunun sağa mı yoksa sola mı çalışacağını belirleyip yay yönünü kolun
SIGNO BARİYER BAĞLANTI ŞEMASI Mekanik Montaj 1) Bariyerle gelen malzemeleri resim 1 de görüldüğü gibi kontrol edin. 2) Bariyerin kolunun sağa mı yoksa sola mı çalışacağını belirleyip yay yönünü kolun
KUMANDA TEKNİKLERİ. Kumanda Devre Elemanları Asenkron Motor Kumanda Teknikleri Asenkron Motorlara Yol Verme
 1 KUMANDA TEKNİKLERİ Dersin Modülleri Kumanda Devre Elemanları Asenkron Motor Kumanda Teknikleri Asenkron Motorlara Yol Verme Hidrolik Sistemler Elektro-Hidrolik Sistemler Lojik Entegre Uygulamaları Temel
1 KUMANDA TEKNİKLERİ Dersin Modülleri Kumanda Devre Elemanları Asenkron Motor Kumanda Teknikleri Asenkron Motorlara Yol Verme Hidrolik Sistemler Elektro-Hidrolik Sistemler Lojik Entegre Uygulamaları Temel
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ BURSA EYLÜL 2005 İÇİNDEKİLER AÇIKLAMALAR KOD ALAN DAL/MESLEK MODÜLÜN ADI MODÜLÜN TANIMI SÜRE ÖN KOŞUL YETERLİK
T.C. MİLLÎ EĞİTİM BAKANLIĞI MEGEP MESLEKÎ EĞİTİM VE ÖĞRETİM SİSTEMİNİN GÜÇLENDİRİLMESİ PROJESİ BURSA EYLÜL 2005 İÇİNDEKİLER AÇIKLAMALAR KOD ALAN DAL/MESLEK MODÜLÜN ADI MODÜLÜN TANIMI SÜRE ÖN KOŞUL YETERLİK
KUMANDA TEKNĐĞĐ LABORATUVARI (I) DENEY FÖYÜ (Elektromekanik Kumanda)
 DENEY FÖYÜ (Elektromekanik Kumanda)") MARMARA ÜNĐVERSĐTESĐ TEKNĐK EĞĐTĐM FAKÜLTESĐ ELEKTRĐK EĞĐTĐMĐ BÖLÜMÜ KUMANDA TEKNĐĞĐ LABORATUVARI (I) DENEY FÖYÜ (Elektromekanik Kumanda) Yrd.Doç.Dr.Mustafa ONAT Yrd.Doç.Dr. Hasan ERDAL Đstanbul Mart 2011
MARMARA ÜNĐVERSĐTESĐ TEKNĐK EĞĐTĐM FAKÜLTESĐ ELEKTRĐK EĞĐTĐMĐ BÖLÜMÜ KUMANDA TEKNĐĞĐ LABORATUVARI (I) DENEY FÖYÜ (Elektromekanik Kumanda) Yrd.Doç.Dr.Mustafa ONAT Yrd.Doç.Dr. Hasan ERDAL Đstanbul Mart 2011
Asenkron motorların bir kumanda merkezinden yıldız/üçgen çalıştırılması için oluşturulacak kumanda ve güç devresini çiziniz.
 Kontaktörün Tanımı kısaca yazıp çalışma prensip şemasını çiziniz. Asenkron motorların bir kumanda merkezinden yıldız/üçgen çalıştırılması için oluşturulacak kumanda ve güç devresini çiziniz. Kompanzasyonun
Kontaktörün Tanımı kısaca yazıp çalışma prensip şemasını çiziniz. Asenkron motorların bir kumanda merkezinden yıldız/üçgen çalıştırılması için oluşturulacak kumanda ve güç devresini çiziniz. Kompanzasyonun
void setup() fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.
 fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.") ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
3 Fazlı Motorların Güçlerinin PLC ile Kontrolü. Doç. Dr. Ramazan BAYINDIR
 3 Fazlı Motorların Güçlerinin PLC ile Kontrolü Doç. Dr. Ramazan BAYINDIR Endüstride çok yaygın olarak kullanılan asenkron motorların sürekli izlenmesi ve arızalarının en aza indirilmesi büyük önem kazanmıştır.
3 Fazlı Motorların Güçlerinin PLC ile Kontrolü Doç. Dr. Ramazan BAYINDIR Endüstride çok yaygın olarak kullanılan asenkron motorların sürekli izlenmesi ve arızalarının en aza indirilmesi büyük önem kazanmıştır.
2- Tristör ile yük akımı değiştirilerek ayarlı yükkontrolü yapılabilir.
 Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
Tristörlü Redresörler ( Doğrultmaçlar ) : Alternatif akımı doğru akıma çeviren sistemlere redresör denir. Redresörler sanayi için gerekli olan DC gerilimin elde edilmesini sağlar. Büyük akım ve gerilimlerin
ASENKRON MOTORLARA YOL VERME METODLARI
 DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
DENEY-6 ASENKRON MOTORLARA YOL VERME METODLARI TEORİK BİLGİ KALKINMA AKIMININ ETKİLERİ Asenkron motorların çalışmaya başladıkları ilk anda şebekeden çektiği akıma kalkınma akımı, yol alma akımı veya kalkış
PROGRAM DENETİM İŞLEMLERİ
 PROGRAM DENETİM İŞLEMLERİ Denetim işleminin olmadığı bir program yapısında, birinci komuttan son komuta kadar olan bütün komutlar sırasıyla işlenmektedir (Lineer programlama). Programın tamamı OB1 (MAIN)
PROGRAM DENETİM İŞLEMLERİ Denetim işleminin olmadığı bir program yapısında, birinci komuttan son komuta kadar olan bütün komutlar sırasıyla işlenmektedir (Lineer programlama). Programın tamamı OB1 (MAIN)
SAYISAL MANTIK LAB. PROJELERİ
 1. 8 bitlik Okunur Yazılır Bellek (RAM) Her biri ayrı adreslenmiş 8 adet D tipi flip-flop kullanılabilir. RAM'lerde okuma ve yazma işlemleri CS (Chip Select), RD (Read), WR (Write) kontrol sinyalleri ile
1. 8 bitlik Okunur Yazılır Bellek (RAM) Her biri ayrı adreslenmiş 8 adet D tipi flip-flop kullanılabilir. RAM'lerde okuma ve yazma işlemleri CS (Chip Select), RD (Read), WR (Write) kontrol sinyalleri ile
Elektrik Kumanda Devreleri Dersleri. Tablo 1.1: Kumanda Devre Sembolleri
 Elektrik Kumanda Devreleri Dersleri Tablo 1.1: Kumanda Devre Sembolleri A. KUMANDA DEVRE SEMBOLLERİ Otomatik kumanda devre şemalarında kullanılan elemanların resimleri yerine, o elemanların yerini tutacak
Elektrik Kumanda Devreleri Dersleri Tablo 1.1: Kumanda Devre Sembolleri A. KUMANDA DEVRE SEMBOLLERİ Otomatik kumanda devre şemalarında kullanılan elemanların resimleri yerine, o elemanların yerini tutacak
ELEKTRİK ELEKTRONİK TEKNOLOJİSİ
 T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ PLC İLE MOTOR KONTROLÜ 523EO0054 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer
T.C. MİLLÎ EĞİTİM BAKANLIĞI ELEKTRİK ELEKTRONİK TEKNOLOJİSİ PLC İLE MOTOR KONTROLÜ 523EO0054 Ankara, 2011 Bu modül, mesleki ve teknik eğitim okul/kurumlarında uygulanan Çerçeve Öğretim Programlarında yer
ALEV MONİTÖRÜ. ( 4 20 ma ) 03MA. 03MA Alev monitörünün uygulama alanları : 03MA Alev monitörünün yapısı : Özellikler :
 03MA. 03MA Alev monitörünün uygulama alanları : 03MA Alev monitörünün yapısı : Özellikler :") ALEV MONİTÖRÜ ( 4 20 ma ) 03MA 03MA Alev monitörünün uygulama alanları : Brülörlerde alev denetimi Ultraviyole fotoseller ile alev izlemek için. Yüksek gerilim hatlarında korona tespit etmek için. Yarı
ALEV MONİTÖRÜ ( 4 20 ma ) 03MA 03MA Alev monitörünün uygulama alanları : Brülörlerde alev denetimi Ultraviyole fotoseller ile alev izlemek için. Yüksek gerilim hatlarında korona tespit etmek için. Yarı
Teorik Bilgi DENEY 7: ASENKRON VE SENKRON SAYICILAR
 DENEY 7: ASENKRON VE SENKRON SAYICILAR Deneyin Amaçları Asenkron ve senkron sayıcı devre yapılarının öğrenilmesi ve deneysel olarak yapılması Deney Malzemeleri 74LS08 Ve Kapı Entegresi (1 Adet) 74LS76
DENEY 7: ASENKRON VE SENKRON SAYICILAR Deneyin Amaçları Asenkron ve senkron sayıcı devre yapılarının öğrenilmesi ve deneysel olarak yapılması Deney Malzemeleri 74LS08 Ve Kapı Entegresi (1 Adet) 74LS76
20. ÜNİTE ASENKRON MOTORLARA YOL VERME YÖNTEMLERİ
 20. ÜNİTE ASENKRON MOTORLARA YOL VERME YÖNTEMLERİ KONULAR 1. Üç Fazlı Asenkron Motorlara a. Direk Yol Verme b. Yıldız-Üçgen Yol Verme 2. Uzaktan (İki Yerden) Kumanda 3. Enversör (Sağ-Sol) Çalıştırma 4.
20. ÜNİTE ASENKRON MOTORLARA YOL VERME YÖNTEMLERİ KONULAR 1. Üç Fazlı Asenkron Motorlara a. Direk Yol Verme b. Yıldız-Üçgen Yol Verme 2. Uzaktan (İki Yerden) Kumanda 3. Enversör (Sağ-Sol) Çalıştırma 4.
DENEY 2- Sayıcılar. 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi.
 DENEY 2- Sayıcılar DENEY 2- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL BİLGİLER Sayıcılar flip-floplar
DENEY 2- Sayıcılar DENEY 2- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL BİLGİLER Sayıcılar flip-floplar
TIA P0RTAL (TEMEL DÜZEY) S7-1200 S7-300 S7-400
 S7-1200 S7-300 S7-400") TIA P0RTAL (TEMEL DÜZEY) S7-1200 S7-300 S7-400 EĞİTMEN AD SOYAD : FAHRETTİN ERDİNÇ TECRÜBE : 1996 DAN BERİ OKUL : 1995 DEÜ ELK-ELKTR MÜH. LÜTFEN DİKKAT! SINIFTAKİ BAŞARIMIZIN MAKSİMUM DÜZEYDE OLMASI İÇİN:
TIA P0RTAL (TEMEL DÜZEY) S7-1200 S7-300 S7-400 EĞİTMEN AD SOYAD : FAHRETTİN ERDİNÇ TECRÜBE : 1996 DAN BERİ OKUL : 1995 DEÜ ELK-ELKTR MÜH. LÜTFEN DİKKAT! SINIFTAKİ BAŞARIMIZIN MAKSİMUM DÜZEYDE OLMASI İÇİN:
Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü
 Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü Dersin Amacı Pnömatik sistemlerde kullanılan elektrik kumanda elemanlarını tanıtmak. Kumanda elemanları ve pnömatik valfleri kullanarak
Elektropnömatik Sistemlerin Programlanabilir Denetleyiciler ile kontrolü Dersin Amacı Pnömatik sistemlerde kullanılan elektrik kumanda elemanlarını tanıtmak. Kumanda elemanları ve pnömatik valfleri kullanarak
DENEY 2- Sayıcılar ve Kaydırmalı Kaydediciler
 DENEY 2- Sayıcılar ve Kaydırmalı Kaydediciler DENEY 2a- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL
DENEY 2- Sayıcılar ve Kaydırmalı Kaydediciler DENEY 2a- JK Flip-Flop Devreleri DENEYİN AMACI 1. Sayıcıların prensiplerinin ve sayıcıların JK flip-flopları ile nasıl gerçeklendiklerinin incelenmesi. GENEL
Mikroişlemcili Sistemler ve Laboratuvarı
 SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Zamanlayıcılar ve Sayıcılar Doç.Dr. Ahmet Turan ÖZCERİT Doç.Dr. Cüneyt
SAKARYA ÜNİVERSİTESİ Bilgisayar ve Bilişim Bilimleri Fakültesi Bilgisayar Mühendisliği Bölümü Mikroişlemcili Sistemler ve Laboratuvarı Zamanlayıcılar ve Sayıcılar Doç.Dr. Ahmet Turan ÖZCERİT Doç.Dr. Cüneyt
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.com ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (3) 65-70 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
www.teknolojikarastirmalar.com ISSN:1304-4141 Makine Teknolojileri Elektronik Dergisi 2005 (3) 65-70 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
Bölüm 7 Ardışıl Lojik Devreler
 Bölüm 7 Ardışıl Lojik Devreler DENEY 7- Flip-Floplar DENEYİN AMACI. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop türlerinin
Bölüm 7 Ardışıl Lojik Devreler DENEY 7- Flip-Floplar DENEYİN AMACI. Kombinasyonel ve ardışıl lojik devreler arasındaki farkları ve çeşitli bellek birimi uygulamalarını anlamak. 2. Çeşitli flip-flop türlerinin
DONANIM VE PROĞRAMLAMA
 PLC DONANIM VE PROĞRAMLAMA S7 200 2. BÖLÜM Hazırlayan : Semih Atik atikse@gmail.com ÖZEL DAHİLİ RÖLELER Özel dahili röleler ( özel hafıza bitleri ) özel görev yüklenmiş rölelerdir. Bunlardan bazıları :
PLC DONANIM VE PROĞRAMLAMA S7 200 2. BÖLÜM Hazırlayan : Semih Atik atikse@gmail.com ÖZEL DAHİLİ RÖLELER Özel dahili röleler ( özel hafıza bitleri ) özel görev yüklenmiş rölelerdir. Bunlardan bazıları :
TEKNOLOJİK ARAŞTIRMALAR
 www.teknolojikarastirmalar.com ISSN:304-44 Makine Teknolojileri Elektronik Dergisi 005 () 55-60 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
www.teknolojikarastirmalar.com ISSN:304-44 Makine Teknolojileri Elektronik Dergisi 005 () 55-60 TEKNOLOJİK ARAŞTIRMALAR Teknik Not Problemlerin Farklı Endüstriyel Otomasyon Yöntemleri ile Çözümlenerek
3 FAZLI ASENKRON MOTORLAR
 3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
3 FAZLI ASENKRON MOTORLAR 3 FAZLI ASENKRON MOTORLAR Üç fazlı AC makinelerde üretilen üç fazlı gerilim, endüstride R-S-T (L1-L2- L3) olarak bilinir. R-S-T gerilimleri, aralarında 120 şer derece faz farkı
Deney 6: Ring (Halka) ve Johnson Sayıcılar
 ve Johnson Sayıcılar") Deney 6: Ring (Halka) ve Johnson Sayıcılar Kullanılan Elemanlar xlm Entegresi, x0 kohm direnç, x00 kohm direnç, x0 µf elektrolitik kondansatör, x00 nf kondansatör, x 7HC7 (D flip-flop), x 0 ohm, x Led
Deney 6: Ring (Halka) ve Johnson Sayıcılar Kullanılan Elemanlar xlm Entegresi, x0 kohm direnç, x00 kohm direnç, x0 µf elektrolitik kondansatör, x00 nf kondansatör, x 7HC7 (D flip-flop), x 0 ohm, x Led
FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU
 FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU KONTEK OTOMASYON A.Ş. BEYİT SOK. NO:27 YUKARI DUDULLU ÜMRANİYE / İSTANBUL 0216 466 47 00 (T) 0216 466 21 20 (F) www.kontekotomasyon.com.tr Sayfa 1 / 7 TUŞ FONKSİYONLARI
FUJI MICRO HIZLI DEVREYE ALMA KILAVUZU KONTEK OTOMASYON A.Ş. BEYİT SOK. NO:27 YUKARI DUDULLU ÜMRANİYE / İSTANBUL 0216 466 47 00 (T) 0216 466 21 20 (F) www.kontekotomasyon.com.tr Sayfa 1 / 7 TUŞ FONKSİYONLARI
KOU T.E.F. PLC KURS NOTU
 1. Giriş... 3 2. PLC Yapısı... 4 2.1. Merkezi İşlem Birimi (CPU)... 5 2.2. Giriş Çıkış Ara Birimleri... 6 2.2.1. Ayrık I/O... 6 3. PLC ile Röle Sistemi Arasındaki Fark... 8 Kumanda Sistemi Analizi... 8
1. Giriş... 3 2. PLC Yapısı... 4 2.1. Merkezi İşlem Birimi (CPU)... 5 2.2. Giriş Çıkış Ara Birimleri... 6 2.2.1. Ayrık I/O... 6 3. PLC ile Röle Sistemi Arasındaki Fark... 8 Kumanda Sistemi Analizi... 8
Semboller : :Açma kapama alteri :Ate leme butonu :Yardımcı röle :Merkez kontak :Normalde açık kontak :Normalde kapalı kontak :UV.
 ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
ALEV MONİTÖRÜ 03A1 Uygulama Alev monitörleri, uygun alev elektrodu veya UV. fotosel ile birlikte, alevin belirli bir standardın altında olduğunu, yanmanın iyi olduğunu veya alevin söndüğünü haber verir.
OTOMASYON PROJELERİ VE UYGULAMALARI
 OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Normalde insanlar tarafından gerçekleştirilen ya da kontrol edilen görevlerin makinalar veya sistemler tarafından gerçekleştirilmesidir. Otomasyon Kontrol
OTOMASYON PROJELERİ VE UYGULAMALARI Otomasyon Normalde insanlar tarafından gerçekleştirilen ya da kontrol edilen görevlerin makinalar veya sistemler tarafından gerçekleştirilmesidir. Otomasyon Kontrol
DVP-SV2 SERİSİ PLC YÜKSEK HIZLI PALS GİRİŞLERİ COUNTER TABLOSU
 DVP-SV2 SERİSİ PLC YÜKSEK HIZLI PALS GİRİŞLERİ COUNTER TABLOSU DELTA ES5 SERİSİ OPEN COLLECTOR ENCODER KABLO RENKLERİ KAHVERENGİ ENCODER BESLEMESİ (24VDC) MAVİ ENCODER BESLEMESİ (0VDC) SİYAH ENCODER OUTPUT
DVP-SV2 SERİSİ PLC YÜKSEK HIZLI PALS GİRİŞLERİ COUNTER TABLOSU DELTA ES5 SERİSİ OPEN COLLECTOR ENCODER KABLO RENKLERİ KAHVERENGİ ENCODER BESLEMESİ (24VDC) MAVİ ENCODER BESLEMESİ (0VDC) SİYAH ENCODER OUTPUT
UYGULAMA 1 Aşağıdaki basit temel kumanda devrelerini gerçekleştiriniz.
 UYGULAMA 1 Aşağıdaki basit temel kumanda devrelerini gerçekleştiriniz. a - Start stop butonu yardımıyla güç devresinin (lamba veya motor) çalıştırılması, İşin Çalışması : Kumanda devresindeki start butonuna
UYGULAMA 1 Aşağıdaki basit temel kumanda devrelerini gerçekleştiriniz. a - Start stop butonu yardımıyla güç devresinin (lamba veya motor) çalıştırılması, İşin Çalışması : Kumanda devresindeki start butonuna
STF1000 FIRIN KONTROL SİSTEMİ KULLANIM KILAVUZU
 STF1000 FIRIN KONTROL SİSTEMİ KULLANIM KILAVUZU 1 TUŞLAR: START : Program çalıştırmak için kullanılır. STOP: Çalışmakta olan programı sonlandırmak için kullanılır. Stop tuşuna 1 kez basıldığında program
STF1000 FIRIN KONTROL SİSTEMİ KULLANIM KILAVUZU 1 TUŞLAR: START : Program çalıştırmak için kullanılır. STOP: Çalışmakta olan programı sonlandırmak için kullanılır. Stop tuşuna 1 kez basıldığında program
ALC ELEKTRİKLİ PANO TEST PROSEDÜRÜ. 2 Tablo elektriğe bağlanır. OK. 3.1 Üç faz kontrol edilir. L1 L2 L3
 ALC ELEKTRİKLİ PANO TEST PROSEDÜRÜ Tarih: Seri No: 1.1 Tablodaki elemanlar gözle kontrol edilir. OK 1.2 Terminallerdeki kablo bağlantılarının sıkılığı el ile kontrol edilir. OK 2 Tablo elektriğe bağlanır.
ALC ELEKTRİKLİ PANO TEST PROSEDÜRÜ Tarih: Seri No: 1.1 Tablodaki elemanlar gözle kontrol edilir. OK 1.2 Terminallerdeki kablo bağlantılarının sıkılığı el ile kontrol edilir. OK 2 Tablo elektriğe bağlanır.
PROGRAMLANABĐLĐR DENETLEYĐCĐLER (PLC) UYGULAMA ÖRNEKLERĐ - 1 UYGULAMA 1
 UYGULAMA ÖRNEKLERĐ - 1 UYGULAMA 1") UYGULAMA 1 Bina Otomasyonu Uygulaması Her türlü güvenlik önlemlerinin alınacağı, evde yaşayan insanların yapacağı işleri minimuma indiren, bu uygulamaları sensör sayesinde gerçekleştirilecektir. Đstenen
UYGULAMA 1 Bina Otomasyonu Uygulaması Her türlü güvenlik önlemlerinin alınacağı, evde yaşayan insanların yapacağı işleri minimuma indiren, bu uygulamaları sensör sayesinde gerçekleştirilecektir. Đstenen
GÜÇ SİSTEMİ Min Maks Birim Giriş Gerilimi 12 18 V-DC Giriş Akımı 2 5 A Güç Max
 DNK-108 Teknik Özellikler GÜÇ SİSTEMİ Min Maks Birim Giriş Gerilimi 12 18 V-DC Giriş Akımı 2 5 A Güç Max 30 W Kontrol Giriş Gerilimi 220V AC Kontrol Çıkış Gerilimi 15 18 DC Hız kontrol Cihazı Çıkış Gerilimi
DNK-108 Teknik Özellikler GÜÇ SİSTEMİ Min Maks Birim Giriş Gerilimi 12 18 V-DC Giriş Akımı 2 5 A Güç Max 30 W Kontrol Giriş Gerilimi 220V AC Kontrol Çıkış Gerilimi 15 18 DC Hız kontrol Cihazı Çıkış Gerilimi
İKS KUMANDA DEVRELERİ. HAZIRLAYAN Hüseyin BULGURCU Balıkesir-2006
 İKS KUMANDA DEVRELERİ HAZIRLAYAN Hüseyin BULGURCU Balıkesir-2006 1 KONULAR 1. KUMANDA ELEMANLARI VE SEMBOLLER 2. KUMANDA YÖNTEMLERİ 3. YOL VERME YÖNTEMLERİ 4. EV TİPİ SOĞUTUCULAR 5. TİCARİ TİP SOĞUTUCULAR
İKS KUMANDA DEVRELERİ HAZIRLAYAN Hüseyin BULGURCU Balıkesir-2006 1 KONULAR 1. KUMANDA ELEMANLARI VE SEMBOLLER 2. KUMANDA YÖNTEMLERİ 3. YOL VERME YÖNTEMLERİ 4. EV TİPİ SOĞUTUCULAR 5. TİCARİ TİP SOĞUTUCULAR
L300P GÜÇ BAĞLANTISI BAĞLANTI TERMİNALLERİ
 L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak
L3P HITACHI HIZ KONTROL ÜNİTESİ KULLANIM KILAVUZU L3P GÜÇ BAĞLANTISI KONTROL DEVRESİ TERMİNAL BAĞLANTISI BAĞLANTI TERMİNALLERİ Terminal Tanımı Açıklama Sembolü L1 L2 L3 Giriş fazları Şebeke gerilimi bağlanacak