SysTick Kesmesi. Suhap SAHIN {\} /\
|
|
|
- Gülistan Konca
- 5 yıl önce
- İzleme sayısı:
Transkript

1 SysTick Kesmesi Suhap SAHIN {\ /\
2 Mesgul Bekleme islem_1 islem_2 islem_3 islem_4 islem_5

3 Seven Segment Buton Led
4 Seven Segment Buton Led Cortex M4 8 32k RAM GPIO Port B GPIO Port A 8 Eight UARTs Four I2Cs Four SSIs CAN 2. GPIO Port D GPIO Port C 4 Twelve Timers Six 64-bit wide USB 2. JTAG 6 GPIO Port F GPIO Port E Two Analog Comparators ADC 2 channels 12 inputs 12 bits Two PWM Modules System Bus 8 5
5 Seven Segment Buton Led Cortex M4 8 32k RAM GPIO Port B GPIO Port A 8 Eight UARTs Four I2Cs Four SSIs CAN 2. GPIO Port D GPIO Port C 4 Twelve Timers Six 64-bit wide USB 2. JTAG 6 GPIO Port F GPIO Port E Two Analog Comparators ADC 2 channels 12 inputs 12 bits Two PWM Modules System Bus 8 5

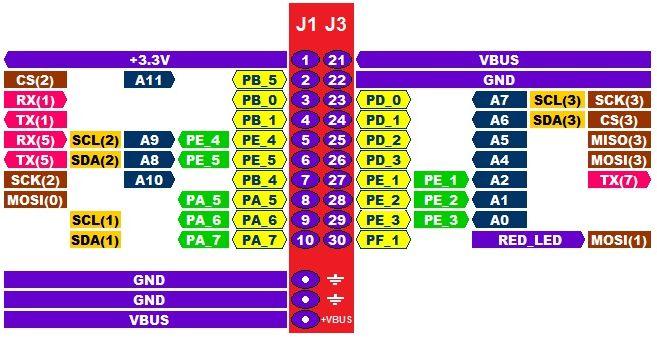
6 Tiva & Stellaris Port Baglantıları
7 Tiva & Stellaris Port Baglantıları
8 Seven Segment Tablosu uint8_t kodlar[1] = { ~b111111, ~b11, ~b11111, ~b11111, ~b1111, ~b11111, ~b111111, ~b111, ~b , ~b ; b b 1 1 b b b b b b b b
9 Seven Segment Seçimi Ortak Katot g f e d Ortak Anod 1 Gnd a b Gnd c dp 1 g f Vcc e d Vcc a b c dp

10 Seven Segment Buton Led g b f Vcc a e dp d Vcc c
11 Tiva & Stellaris Port Baglantıları
12 Port F Kurulumu void init_port_f() { volatile unsigned long tmp; SYSCTL_RCGCGPIO_R = x2; tmp = SYSCTL_RCGCGPIO_R; GPIO_PORTF_LOCK_R = x4c4f434b; GPIO_PORTF_CR_R = x1f; GPIO_PORTF_AMSEL_R = x; GPIO_PORTF_PCTL_R = x; GPIO_PORTF_DIR_R = xe; GPIO_PORTF_AFSEL_R = x; GPIO_PORTF_PUR_R = x11; GPIO_PORTF_DEN_R = x1f; // Port F nin saatini aktifleştir // Saatin başlaması için gecikme // Port F GPIO kilidini aç // PF4- kilidini aç // PF anlog I/O kapat // PF4- GPIO olarak ayarla // PF4,PF giriş, PF3-1 çıkış // PF7- Alternatif fonksiyonları kapat // PF ve PF4 üzerindeki pull-up direncini aktifleştir // PF4- digital I/O aktifleştir
13 Port B Kurulumu void init_port_b() { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOB; delay = SYSCTL_RCGC2_R; GPIO_PORTB_DIR_R = xff; GPIO_PORTB_AFSEL_R &= ~xff; GPIO_PORTB_DEN_R = xff; // Port B nin saati aktifleştir // Gecikme // Port B nin tüm bitleri cikis olarak ayarla // Alternatif fonksiyonlar kapat // Tüm Port B için Digital çalışmayı aktifleştir
14 Mesgul Bekleme volatile int sayi = ; //Seven segment sayacı void islem_1() { volatile unsigned long delay; uint8_t kodlar[] = { b111111, b11, b11111, b11111, b1111, b11111, b111111, b111, b , b ; GPIO_PORTB_DATA_R = kodlar[sayi]; for (delay = ; delay < 2 ; delay++); sayi = (sayi + 1) % 1;
15 Mesgul Bekleme volatile int sayi = ; //Seven segment sayacı void islem_1() { volatile unsigned long delay; uint8_t kodlar[] = { b111111, b11, b11111, b11111, b1111, b11111, b111111, b111, b , b ; GPIO_PORTB_DATA_R = kodlar[sayi]; for (delay = ; delay < 2 ; delay++); sayi = (sayi + 1) % 1;
16 Mesgul Bekleme volatile int sayi = ; //Seven segment sayacı void islem_1() { volatile unsigned long delay; uint8_t kodlar[] = { b111111, b11, b11111, b11111, b1111, b11111, b111111, b111, b , b ; GPIO_PORTB_DATA_R = kodlar[sayi]; for (delay = ; delay < 2 ; delay++); sayi = (sayi + 1) % 1;
17 Mesgul Bekleme volatile int sayi = ; //Seven segment sayacı void islem_1() { volatile unsigned long delay; uint8_t kodlar[] = { b111111, b11, b11111, b11111, b1111, b11111, b111111, b111, b , b ; GPIO_PORTB_DATA_R = kodlar[sayi]; for (delay = ; delay < 2 ; delay++); sayi = (sayi + 1) % 1;
18 Mesgul Bekleme volatile int sayi = ; //Seven segment sayacı void islem_1() { volatile unsigned long delay; uint8_t kodlar[] = { b111111, b11, b11111, b11111, b1111, b11111, b111111, b111, b , b ; GPIO_PORTB_DATA_R = kodlar[sayi]; for (delay = ; delay < 2 ; delay++); sayi = (sayi + 1) % 1;
19 Mesgul Bekleme // button basiliysa ledi yak, degilse sondur void islem_2() { if (GPIO_PORTF_DATA_R & b1 == ) { GPIO_PORTF_DATA_R = b1; else { GPIO_PORTF_DATA_R &= ~b1;
20 Mesgul Bekleme // button basiliysa ledi yak, degilse sondur void islem_2() { if (GPIO_PORTF_DATA_R & b1 == ) { GPIO_PORTF_DATA_R = b1; else { GPIO_PORTF_DATA_R &= ~b1;
21 Mesgul Bekleme // button basiliysa ledi yak, degilse sondur void islem_2() { if (GPIO_PORTF_DATA_R & b1 == ) { GPIO_PORTF_DATA_R = b1; else { GPIO_PORTF_DATA_R &= ~b1;
22 Mesgul Bekleme // button basiliysa ledi yak, degilse sondur void islem_2() { if (GPIO_PORTF_DATA_R & b1 == ) { GPIO_PORTF_DATA_R = b1; else { GPIO_PORTF_DATA_R &= ~b1;
23 Mesgul Bekleme int main() { init_port_b(); init_port_f(); // surekli islem_1 ve islem_2'yi yap while (1) { islem_1(); islem_2();
24 Mesgul Bekleme int main() { init_port_b(); init_port_f(); // surekli islem_1 ve islem_2'yi yap while (1) { islem_1(); islem_2();
25 Mesgul Bekleme int main() { init_port_b(); init_port_f(); // surekli islem_1 ve islem_2'yi yap while (1) { islem_1(); islem_2();
26 Mesgul Bekleme int main() { init_port_b(); init_port_f(); // surekli islem_1 ve islem_2'yi yap while (1) { islem_1(); islem_2();
27 Kesme

28 Es Zamanlı islem yapma islem_2 islem_1 islem_3



29 Senkronizasyon clrscr(); 1us 1us
30 Kesme Meşgu B l e Dur 1 Dur Kes 2 Gir ş / Çıkış Ver Gir ş / Çıkış Ver Gir ş / Çıkış Ver Gir ş / Çıkış Ver Kes Kes şle d dön e ma 3 Meşgu Diğer işle r Dur Kes 2 Gir ş / Çıkış Ver Hazır Meşgu Dur 3 Hazır Meşgu Dur Dur Kes 1 Hazır Gir ş / Çıkış Ver Set Dig işle r şle d dön e Kes şle d dön e
31 Kesme Kesme: Donanım tarafından tetiklenen yazılım islemi 1. harici bir G /Ç aygıtı (UART v.b.) 2. dahili bir olay (veriyolu hatası, periyodik zamanlayıcı v.b.) Trigger: Kesmeyi gerçekleyen donanım olayı Trigger Flag: Kesme bayragı

32 Thread Ch o Cod ::Blo s Use Ker C U C U C U C U
33 Process re t sak re t sak fi da co Ch o fi da co Ch o re t sak re t sak
34 Process fi da co Ch o ISR : Arkaplan is-parçacıgı(background thread) re t sak re t sak re t sak Her kesme istegi için yeni bir thread olusturulur ISR, kesme isleminden döndügünde thread öldürülür.
35 Interrupt Service Rutine ISR 1-) Tetikleyici temizlenmeli 2-) Yeterince kısa olmalı 3-) delay loop gibi döngüler içermemeli 4-) Kesmeler arasındaki süreler dikkate alınmalı kesme1 Δt IS kesme2 kesme3 IS kesme4 IS
36 Kesme Kurulumu Arm device (Cihaza özel bit) EnableInterrupts (), DisableInterrupts () Enable Nested Vector Interrupt Controller Hangi ISR çalısacak? I (global interrupt enable) = (keme var); 1(kesme yok) kesme maskesi biti (PRIMASK saklayıcısı. bit) Priority (BASEPRI saklayıcısı) Düsük öncelikli kesmeler önlenir, yüksek öncelikli kesmeler çalıstırılır. BASEPRI= 3; öncelik seviyesi, 1 ve 2 olan kesmeler çalıstırılır ancak öncelik sevyesi 3 ve daha yüksek düzeylerdeki kesmeler ertelenir. BASEPRI=; öncelik özelligi devre dısı bırakılır ve tüm kesmelere izin verilir. Trigger SysTick tarafından periyodik olarak ayarlanan NVIC_ST_CTRL_R saklayıcısındaki count biti. Dijital giris pinlerinin yükselen veya düsen kenarlarının ayarladıgı GPIO_PORTF_RIS_R saklayıcısı Trigger Enable Flag RIS Raw Interrupt Status N I de M de
37 Kesme Kurulumu Arm device EnableInterrupts (), DisableInterrupts () Enable NVIC Özel bir ISR çalısacak I (global interrupt enable) kesme maskesi biti (PRIMASK. bit) = 1(kesme yok) Priority (BASEPRI saklayıcısı) ir. n e l Düsük öncelikli kesmeler önlenir, yüksek öncelikli kesmeler çalıstırılır. e rt me e sevyesi 3 ve daha BASEPRI= 3; öncelik seviyesi, 1 ve 2 olan kesmeler çalıstırılır ancakkeöncelik s adar yüksek düzeylerdeki kesmeler ertelenir. k a ılan apkesmelere BASEPRI=; öncelik özelligi devre dısı bırakılır vetüm izin verilir. y = ) Trigger. bit K SysTick tarafından periyodik olarak esi NVIC_ST_CTRL_R saklayıcısındaki count biti. IMASayarlanan R m P s ( e k Dijital giris pinlerinin syükselen i biti veya odikdüsen kenarlarının ayarladıgı GPIO_PORTF_RIS_R saklayıcısı aske k periy m e ic kesm A: SysT N ISTIS
38 Context Switch 2 IS Vec Tab Ma n Pro m Flo 1 In e r In e r Ser Ro t e (IS ) 3
39 Context Switch 1-) Finish instruction P Id R,[R1] s R,[R2] 2-) Suspend R, R1, R2, R3, R12, R14(LR), R14(PC) R15, PSR 3-) LR = xfffffff9 I am running in ISR foreground thread background thread lower priority ISR higher priority ISR SP R R1 Return BACK B R PC Link resister pop the stack R2 R3 R12 L 4-) IPSR interrup number 5-) PC load the adress of ISR(Vector) P SP P
40 Thread Senkronizasyonu background thread co Gir ş / Çıkış Ver re t Dig işle r sak Kes şle d dön e Global Memory flag mail box da sa s buffer FIFO fi Ch o Kes 1 ma da main thread re t sak re t sak
41 ikili semafor flag Kesme olayı IS ma Wor fa 1 Kes O yı fa = fa = 1
42 mail box flag Kesme olayı IS ma Glo Wor fa Ver fa 1 Kes O yı fa = Gir ş / Çıkış Ver fa = 1
43 FIFO (First In First Out) sıralı akıs IS ma Glo FI Gir ş / Çıkış Ver Get Put Ver em
44 Peryodik Kesmeler Analog bir sinyal, saniyede 1 defa örneklemek istensin, Her 1 ms'de bir kesme isteginde bulunmak için dahili zamanlayıcı donanımını kurulur. Kesme hizmeti rutini ADC'yi örnekleyecek, verileri isleyecek (veya kaydedecek) ve daha sonra ana thread e geri dönecektir.
45 Systick Kesmesi Systick ISR ISR Systick Systick ISR ISR Systick
46 Systick Kesmesi Per Meşgu B l e Dur 1 Hazır Meşgu Dur 2 3 Meşgu Diğer işle r Dur Hazır 1 Meşgu Gir ş / Çıkış Ver Hazır Dur Meşgu Dur ik K Hazır 2 Gir ş / Çıkış Ver Gir ş / Çıkış Ver 1 Meşgu Gir ş / Çıkış Ver 1 Hazır Dur Gir ş / Çıkış Ver Hazır 3 Meşgu Gir ş / Çıkış Ver 3
47 Nested Vector Interrup Controller (NVIC) EXPORT Vectors Vectors DCD DCD DCD DCD DCD DCD DCD DCD StackMem + Stack Reset_Handler NMI_Handler HardFault_Handler ; address ISR ; x Top of Stack ; x4 Reset Handler ; x8 NMI Handler ; xc Hard Fault Handler PendSV_Handler SysTick_Handler ; x38 PendSV Handler ; x3c SysTick Handler FlashCtl_Handler GPIOPortF_Handler ; xb4 Flash Control ; xb8 GPIO Port F 32-bitlik bir sabiti tanımlayan bir assembler sözde-op'dır. Interrupt Service Rutine (ISR) Kesme fonksiyonuna ait bellek konumunu isaret eden 32 bitlik vektör
48 ISR Interrup Service Rutine void GPIOPortF_Handler(void){ GPIO_PORTF_ICR_R = x1;
49 Tiva & Stellaris Port Baglantıları

50 Nested Vector Interrup Controller (NVIC)
51 Interrupt Service Rutine ISR
52 Interrupt Service Rutine ISR // The vector table alanı içindeki IntDefaultHandler, // The SysTick handler systick_handler, // The SysTick handler satırı aşağıdaki gibi değiştirilmeli
53 PortF Kurulumu void init_port_f() { volatile unsigned long tmp; SYSCTL_RCGCGPIO_R = x2; tmp = SYSCTL_RCGCGPIO_R; GPIO_PORTF_LOCK_R = x4c4f434b; GPIO_PORTF_CR_R = x1f; GPIO_PORTF_AMSEL_R = x; GPIO_PORTF_PCTL_R = x; GPIO_PORTF_DIR_R = xe; GPIO_PORTF_AFSEL_R = x; GPIO_PORTF_PUR_R = x11; GPIO_PORTF_DEN_R = x1f; // Port F nin saatini aktifleştir // Saatin başlaması için gecikme // Port F GPIO kilidini aç // PF4- kilidini aç // PF anlog I/O kapat // PF4- GPIO olarak ayarla // PF4,PF giriş, PF3-1 çıkış // PF7- Alternatif fonksiyonları kapat // PF ve PF4 üzerindeki pull-up direncini // aktifleştir // PF4- digital I/O aktifleştir
54 SysTick Kesmesi ISR /** systick_handler() fonksiyonu her systick kesmesi olduğunda çalışacak. */ void systick_handler() { // ledin durumunu ters cevir GPIO_PORTF_DATA_R ^= b1;
55 SysTick Kesmesi Kurulumu SysTick'i kapatmak için ENABLE bitini temizlenir Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
56 SysTick Kesmesi Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
57 SysTick Kesmesi Kurulumu RELOAD saklayıcısı ayarlanır Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
58 SysTick Kesmesi Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
59 SysTick Kesmesi Kurulumu Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir deger yazılır Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
60 SysTick Kesmesi Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
61 SysTick Kesmesi Kurulumu NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceligini olusturulur Address Name $EED2 TICK PENDSV DEBUG NVIC_SYS_PRI3_R
62 SysTick Kesmesi Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
63 SysTick Kesmesi Kurulumu NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
64 SysTick Kesmesi Kurulumu CLK_SRC = 1 olması gerekir, CLK_SRC = harici saat modu LM3S / TM4C ailesi yoktur Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
65 SysTick Kesmesi Kurulumu Kesmeleri etkinlestirmek için INTEN'ı ayarlanır Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
66 SysTick Kesmesi Kurulumu Sistemin çalısması için ENABLE biti ayarlanmalı Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
67 SysTick Kesmesi Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
68 SysTick Kesmesi Kurulumu SysTick, saat frekansında azalma saglayan 24 bitlik bir sayacı vardır. Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
69 SysTick Kesmesi Kurulumu CURRENT degeri 1'den 'a iner, COUNT bayragı set olur. Bir sonraki saatte CURRENT RELOAD degeri ile yüklenir. Bu sekilde, SysTick sayacı (CURRENT) sürekli olarak azalmaktadır. RELOAD degeri n ise, SysTick sayacı modulo n + 1 ile çalısır. COUNT bayragı her n + 1 sayıda ayarlanacaktır. Address Name $EE1 COUNT CLK_SRC INTEN ENABLE NVIC_ST_CTRL_R $EE14 24-bit RELOAD value NVIC_ST_RELOAD_R $EE18 24-bit CURRENT value of SysTick counter NVIC_ST_CURRENT_R
70 SysTick Kesmesi int main() { init_port_f(); SysTick_Init(16); // 16 clockta bir kesme uret // islemcinin frekansi 16Mhz = 16 // 16/16 =.1 saniyede bir kesme uretir enable_interrupts(); while (1) { wait_for_interrupt();
71 SysTick Kesmesi static inline void disable_interrupts() { //Kesmeleri pasif yap asm("cpsid I"); static inline void enable_interrupts() { // Kesmeleri aktifleştir asm("cpsie I"); static inline void wait_for_interrupt() { // Kesme olana kadar bekle asm("wfi");

72 Tiva & Stellaris Port Baglantıları
73 PortF Kurulumu void init_port_f() { volatile unsigned long tmp; SYSCTL_RCGCGPIO_R = x2; tmp = SYSCTL_RCGCGPIO_R; GPIO_PORTF_LOCK_R = x4c4f434b; GPIO_PORTF_CR_R = x1f; GPIO_PORTF_AMSEL_R = x; GPIO_PORTF_PCTL_R = x; GPIO_PORTF_DIR_R = xe; GPIO_PORTF_AFSEL_R = x; GPIO_PORTF_PUR_R = x11; GPIO_PORTF_DEN_R = x1f; // Port F nin saatini aktifleştir // Saatin başlaması için gecikme // Port F GPIO kilidini aç // PF4- kilidini aç // PF anlog I/O kapat // PF4- GPIO olarak ayarla // PF4,PF giriş, PF3-1 çıkış // PF7- Alternatif fonksiyonları kapat // PF ve PF4 üzerindeki pull-up direncini // aktifleştir // PF4- digital I/O aktifleştir
74 PortB Kurulumu void init_port_b() { volatile unsigned long delay; SYSCTL_RCGC2_R = SYSCTL_RCGC2_GPIOB; delay = SYSCTL_RCGC2_R; GPIO_PORTB_DIR_R = xff; GPIO_PORTB_AFSEL_R &= ~xff; GPIO_PORTB_DEN_R = xff;
75 Seven Segment Tablosu uint8_t kodlar[] = { b111111, b11, b11111, b11111, b1111, b11111, b111111, b111, b , b ;
76 SysTick Kesmesi ve 7 Segment volatile int sayi = ; void systick_handler() { // systick kesmesi oldugunda bu fonksiyon calisacak sayi = (sayi + 1) % 1; GPIO_PORTB_DATA_R = kodlar[sayi];
77 SysTick Kesmesi ve 7 Segment volatile int sayi = ; void systick_handler() { // systick kesmesi oldugunda bu fonksiyon calisacak sayi = (sayi + 1) % 1; GPIO_PORTB_DATA_R = kodlar[sayi];
78 SysTick Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
79 SysTick Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
80 SysTick Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
81 SysTick Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
82 SysTick Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
83 SysTick Kurulumu /** SysTick_Init() fonksiyonu systick kesmesini aktifleştiriyor. Kaç saniyede bir kesme üretileceğini verilen period parametresine göre ayarlanıyor. */ void SysTick_Init(unsigned long period){ NVIC_ST_CTRL_R = ; // SysTick'i kapatmak için ENABLE bitini temizlenir NVIC_ST_RELOAD_R = period-1; // RELOAD saklayıcısı ayarlanır NVIC_ST_CURRENT_R = ; // Sayacı silmek için NVIC_ST_CURRENT_R'ye herhangi bir // değer yazılır NVIC_SYS_PRI3_R = (NVIC_SYS_PRI3_R&xFFFFFF) x4; // NVIC_SYS_PRI3_R kaydında TICK alanını kullanarak SysTick kesmelerinin önceliğini oluşturulur NVIC_ST_CTRL_R = x7; // NVIC_ST_CTRL_R kontrol saklayıcısına istenen modu yazılır
84 SysTick Kesmesi static inline void disable_interrupts() { //Kesmeleri pasif yap asm("cpsid I"); static inline void enable_interrupts() { // Kesmeleri aktifleştir asm("cpsie I"); static inline void wait_for_interrupt() { // Kesme olana kadar bekle asm("wfi");
85 SysTick ve Led Yak/Söndür // button basiliysa ledi yak, degilse sondur void islem_2() { if (GPIO_PORTF_DATA_R & b1 == ) { GPIO_PORTF_DATA_R = b1; else { GPIO_PORTF_DATA_R &= ~b1;
86 SysTick ve Led Yak/Söndür int main() { init_port_b(); init_port_f(); //.1 saniyede bir kesme uretir SysTick_Init(16); // 16 clockta bir kesme uret enable_interrupts(); while (1) { islem_2();
87 SysTick ve Led Yak/Söndür int main() { init_port_b(); init_port_f(); //.1 saniyede bir kesme uretir SysTick_Init(16); // 16 clockta bir kesme uret enable_interrupts(); while (1) { islem_2();
88 SysTick ve Led Yak/Söndür int main() { init_port_b(); init_port_f(); //.1 saniyede bir kesme uretir SysTick_Init(16); // 16 clockta bir kesme uret enable_interrupts(); while (1) { islem_2();
89 SysTick ve Led Yak/Söndür int main() { init_port_b(); init_port_f(); //.1 saniyede bir kesme uretir SysTick_Init(16); // 16 clockta bir kesme uret enable_interrupts(); while (1) { islem_2();


90 Sorular
Timer. Suhap SAHIN {\} /\
 Timer Suhap SAHIN 0 {\ /\ clock clock Phase-Lock-Loop (Faz-Kilit-Döngü) 400 MHz Faz-Kilit-Döngü ARM mikrodenetleyiciler Faz-Kilit-Döngüleri (PLL'ler) ile donatılmıstır. Tiva kartı, dahili bir 400 MHz PLL
Timer Suhap SAHIN 0 {\ /\ clock clock Phase-Lock-Loop (Faz-Kilit-Döngü) 400 MHz Faz-Kilit-Döngü ARM mikrodenetleyiciler Faz-Kilit-Döngüleri (PLL'ler) ile donatılmıstır. Tiva kartı, dahili bir 400 MHz PLL
Mikrokontrolcu Portları {\} /\ Suhap SAHIN
 Mikrokontrolcu Portları 0 {\} /\ Suhap SAHIN Gelistirme Ortamının Kurulumu Sanal Makine Programı(VirtualBo) Sanal Makine Dosyasının Kurulumu(ubuntu-kouembedded-v20160217.ova) Virtualbo kurulumu https://www.virtualbo.org/
Mikrokontrolcu Portları 0 {\} /\ Suhap SAHIN Gelistirme Ortamının Kurulumu Sanal Makine Programı(VirtualBo) Sanal Makine Dosyasının Kurulumu(ubuntu-kouembedded-v20160217.ova) Virtualbo kurulumu https://www.virtualbo.org/
Sistem Programlama Deney 1
 Sistem Programlama Deney 1 Deney başlamadan önce deney grubu listenizi aşağıdaki dokümana yazınız: https://docs.google.com/spreadsheets/d/1gxplmgkkfwlutcvn9_its7tt rcwuzkqfnwhlpfdodhw/edit?usp=sharing
Sistem Programlama Deney 1 Deney başlamadan önce deney grubu listenizi aşağıdaki dokümana yazınız: https://docs.google.com/spreadsheets/d/1gxplmgkkfwlutcvn9_its7tt rcwuzkqfnwhlpfdodhw/edit?usp=sharing
Giris {\} /\ Suhap SAHIN
 Giris 0 {\} /\ Suhap SAHIN Kaynaklar http://users.ece.utexas.edu/~valvano/volume1/e-book/ Kaynaklar https://www.edx.org/course/embedded-systems-shape-world-utaustinx-ut-6-02x Konular 1. 2. 3. 4. 5. 6.
Giris 0 {\} /\ Suhap SAHIN Kaynaklar http://users.ece.utexas.edu/~valvano/volume1/e-book/ Kaynaklar https://www.edx.org/course/embedded-systems-shape-world-utaustinx-ut-6-02x Konular 1. 2. 3. 4. 5. 6.
ARM Ders Notları. SysCtlClockSet( SYSCTL_SYSDIV_4 SYSCTL_USE_PLL SYSCTL_OSC_MAIN SYSCTL_XTAL_8MHZ);
;") Faz Kilitlemeli Döngü (Phase-Look-Loop)-PLL Normalde bir microdenetleyicinin çalışma hızı dışarıdaki bir kristal ile belirlenir. Stellaris EKK- LM3S1968 geliştirme kartının 8 MHz lik bir kristali vardır.
Faz Kilitlemeli Döngü (Phase-Look-Loop)-PLL Normalde bir microdenetleyicinin çalışma hızı dışarıdaki bir kristal ile belirlenir. Stellaris EKK- LM3S1968 geliştirme kartının 8 MHz lik bir kristali vardır.
LCD (Liquid Crystal Display )
") LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
LCD (Liquid Crystal Display ) Hafif olmaları,az yer kaplamaları gibi avantajları yüzünden günlük hayatta birçok cihazda tercih edilen Standart LCD paneller +5 V ile çalışır ve genellikle 14 konnektor lü
BM-311 Bilgisayar Mimarisi
 1 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar)
1 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar)
BM-311 Bilgisayar Mimarisi. Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü
 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar) Bus
BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Bilgisayar Bileşenleri Bilgisayarın Fonksiyonu Instruction Cycle Kesmeler (Interrupt lar) Bus
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak
 LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
LPC2104 Mikro Denetleyicisini KEIL İle Programlamak Program yazabilmek için öncelikle komutları tanımamız ve ne işe yaradıklarını bilmemiz gerekir. Komutlar yeri geldikçe çalışma içerisinde anlatılacaktır.
8086 nın Bacak Bağlantısı ve İşlevleri. 8086, 16-bit veri yoluna (data bus) 8088 ise 8- bit veri yoluna sahip16-bit mikroişlemcilerdir.
 8088 ise 8- bit veri yoluna sahip16-bit mikroişlemcilerdir.") Bölüm 9: 8086 nın Bacak Bağlantısı ve İşlevleri 8086 & 8088 her iki işlemci 40-pin dual in-line (DIP) paketinde üretilmişlerdir. 8086, 16-bit veri yoluna (data bus) 8088 ise 8- bit veri yoluna sahip16-bit
Bölüm 9: 8086 nın Bacak Bağlantısı ve İşlevleri 8086 & 8088 her iki işlemci 40-pin dual in-line (DIP) paketinde üretilmişlerdir. 8086, 16-bit veri yoluna (data bus) 8088 ise 8- bit veri yoluna sahip16-bit
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI KESMELİ GİRİŞ/ÇIKIŞ
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI KESMELİ GİRİŞ/ÇIKIŞ 8259 PIC (Programmable Interrupt Controller) ve 8086 CPU tümleşik devrelerin sinyal akışı
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI KESMELİ GİRİŞ/ÇIKIŞ 8259 PIC (Programmable Interrupt Controller) ve 8086 CPU tümleşik devrelerin sinyal akışı
Mikroişlemciler. Microchip PIC
 Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
Mikroişlemciler Microchip PIC Öğr. Gör. M. Ozan AKI r1.1 Microchip PIC Mikrodenetleyiciler www.microchip.com Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler Microchip PIC Mikrodenetleyiciler
İÇİNDEKİLER. 3 STM32F4 MIKRO-DENETLEYICISI 23 STM32 Ailesi ve STM32F STM32 Ailesi 23 STM32 Mikrodenetleyicileri 30 Numaralandırılması 30
 VII 1 GİRİŞ 1 Gömülü Sistemler (Embedded Systems) 1 Kitap Hakkında 2 Kitap Kimler İçin? 2 Kitabı Takip Edebilmek İçin Gerekenler 3 Kitabın İçeriği ve Uygulamaları 4 2 ARM İŞLEMCISI VE MIKRO-DENETLEYICILER
VII 1 GİRİŞ 1 Gömülü Sistemler (Embedded Systems) 1 Kitap Hakkında 2 Kitap Kimler İçin? 2 Kitabı Takip Edebilmek İçin Gerekenler 3 Kitabın İçeriği ve Uygulamaları 4 2 ARM İŞLEMCISI VE MIKRO-DENETLEYICILER
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur.
 Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Arduino nedir? Arduino donanım ve yazılımın kolayca kullanılmasına dayalı bir açık kaynak elektronik platformdur. Açık kaynak nedir? Açık kaynak, bir bilgisayar yazılımının makina diline dönüştürülüp kullanımından
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri. ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş
 Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
Erzurum Teknik Üniversitesi RobETÜ Kulübü Robot Eğitimleri ARDUİNO EĞİTİMLERİ I Arş. Gör. Nurullah Gülmüş 29.11.2016 İÇERİK Arduino Nedir? Arduino IDE Yazılımı Arduino Donanım Yapısı Elektronik Bilgisi
C ile Gömülü Sistemler için Yazılım Geliştirme Eğitimi. Apr 10,
 C ile Gömülü Sistemler için Yazılım Geliştirme Eğitimi İçerik ARM Geliştirme Ortamı GPIO sürücüsü Seri Haberleşme Interrupt ve Callback UART SPI İşletim Sistemi(FreeRTOS) CAN SD Kart ve SDIO FAT dosya
C ile Gömülü Sistemler için Yazılım Geliştirme Eğitimi İçerik ARM Geliştirme Ortamı GPIO sürücüsü Seri Haberleşme Interrupt ve Callback UART SPI İşletim Sistemi(FreeRTOS) CAN SD Kart ve SDIO FAT dosya
LCD (Liquid Crystal Display)
") LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
LCD (Liquid Crystal Display) LCD ekranlar bize birçok harfi, sayıları, sembolleri hatta Güney Asya ülkelerin kullandıkları Kana alfabesindeki karakterleri de görüntüleme imkanını verirler. LCD lerde hane
DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK
 KULLANIMI İÇERİK") DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK KESME NEDİR KESME ÇEŞİTLERİ INTCON SAKLAYICISI RBO/INT KESMESİ PORTB (RB4-RB7) LOJİK SEVİYE DEĞİŞİKLİK KESMESİ Ders 12, Slayt 2 1 KESME PIC in bazı
DERS 12 PIC 16F84 ile KESME (INTERRUPT) KULLANIMI İÇERİK KESME NEDİR KESME ÇEŞİTLERİ INTCON SAKLAYICISI RBO/INT KESMESİ PORTB (RB4-RB7) LOJİK SEVİYE DEĞİŞİKLİK KESMESİ Ders 12, Slayt 2 1 KESME PIC in bazı
BÖLÜM 7 Kesmeler.
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 7 Kesmeler www.8051turk.com Amaçlar Kesme tanımını ve önemini kavramak 8051 mikrodenetleyicisinin kesme yapısını öğrenmek 8051 de kullanılan kesme türlerini
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 7 Kesmeler www.8051turk.com Amaçlar Kesme tanımını ve önemini kavramak 8051 mikrodenetleyicisinin kesme yapısını öğrenmek 8051 de kullanılan kesme türlerini
DENEY-5. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-5 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 MİKRODENETLEYİCİDE KESME BİRİMİ Mikrodenetleyicinin değişik kaynaklardan gelen uyarıcı sinyaller
DENEY-5 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 MİKRODENETLEYİCİDE KESME BİRİMİ Mikrodenetleyicinin değişik kaynaklardan gelen uyarıcı sinyaller
DENEY-2. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY-2 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY 2-1: YEDİ SEGMENT GÖSTERGE ÜZERİNDE VERİ GÖRÜNTÜLEME AMAÇ: Mikrodenetleyicinin portuna
DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI
 AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
AMAÇ: DENEY 9-A : PIC 16F877 ve LM-35 ile SICAKLIK ÖLÇÜM UYGULAMASI 1- Mikrodenetleyici kullanarak sıcaklık ölçümünü öğrenmek EasyPIC7 setinde LM-35 kullanılarak analog giriş yaptırılması Sıcaklığın LCD
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ 1 Mikrodenetleyici Anatomisi Çevre Birimler (Peripherals) Timers Watchdog Timer Program sonsuz döngüye girdiğinde işlemciyi resetler İletişim Arayüzleri
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ 1 Mikrodenetleyici Anatomisi Çevre Birimler (Peripherals) Timers Watchdog Timer Program sonsuz döngüye girdiğinde işlemciyi resetler İletişim Arayüzleri
446 GÖMÜLÜ SİSTEM TASARIMI. Lab 9 UART
 446 GÖMÜLÜ SİSTEM TASARIMI Lab 9 UART 9.1 Amaç Bu laboratuvarda LaunchPad ve bilgisayar arasında seri haberleşme gerçekleştirilecektir. Bunun için TExaSdisplay terminal programı kullanılacaktır. UART0
446 GÖMÜLÜ SİSTEM TASARIMI Lab 9 UART 9.1 Amaç Bu laboratuvarda LaunchPad ve bilgisayar arasında seri haberleşme gerçekleştirilecektir. Bunun için TExaSdisplay terminal programı kullanılacaktır. UART0
void setup() fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.
 fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız.") ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
ARDUİNO PROGRAMLAMA fonksiyonu: Bu fonksiyon program ilk açıldığında bir kere çalışır ve gerekli kalibrasyon, setup komutlarını buraya yazarız. fonksiyonu: Diğer programlama dillerinden alışık olduğumuz
BM-311 Bilgisayar Mimarisi
 1 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Processor organization Register organization Instruction cycle 2 Processor organization İşlemci
1 BM-311 Bilgisayar Mimarisi Hazırlayan: M.Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Konular Processor organization Register organization Instruction cycle 2 Processor organization İşlemci
Adres Yolu (Address Bus) Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması
 Bellek Birimi. Veri Yolu (Databus) Kontrol Yolu (Control bus) Şekil xxx. Mikrodenetleyici genel blok şeması") MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
MİKRODENETLEYİCİLER MCU Micro Controller Unit Mikrodenetleyici Birimi İşlemci ile birlikte I/O ve bellek birimlerinin tek bir entegre olarak paketlendiği elektronik birime mikrodenetleyici (microcontroller)
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 3 LCD Gösterge Kullanımı +5 LCD Modülün Bağlantısı 8K2 1K +5 10 P0.5 P0.6 P0.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 1 2 3
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 3 LCD Gösterge Kullanımı +5 LCD Modülün Bağlantısı 8K2 1K +5 10 P0.5 P0.6 P0.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 1 2 3
7. Port Programlama. mikroc Dili ile Mikrodenetleyici Programlama Ders Notları -42- Şekil 2.1. Atmega16 mikrodenetleyici pin şeması
 7. Port Programlama Şekil 2.1. Atmega16 mikrodenetleyici pin şeması A, B, C ve D portları için Register yapıları benzer şekildedir. -42- 7.1. Port Yönlendirme Mikrodenetleyicinin A, B, C, D ve varsa diğer
7. Port Programlama Şekil 2.1. Atmega16 mikrodenetleyici pin şeması A, B, C ve D portları için Register yapıları benzer şekildedir. -42- 7.1. Port Yönlendirme Mikrodenetleyicinin A, B, C, D ve varsa diğer
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek
 Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
Arduino Uno ile Hc-Sr04 ve Lcd Ekran Kullanarak Mesafe Ölçmek 1 Adet Arduino Uno 1 Adet Hc-Sr04 Ultrasonik mesafe sensörü 1 Adet 16 2 Lcd Ekran 1 Adet Breadbord 1 Adet Potansiyometre 2 Ader led Yeteri
x86 Ailesi Mikroişlemciler ve Mikrobilgisayarlar
 x86 Ailesi 1 8085A,8088 ve 8086 2 Temel Mikroişlemci Özellikleri Mikroişlemcinin bir defade işleyebileceği kelime uzunluğu Mikroişlemcinin tek bir komutu işleme hızı Mikroişlemcinin doğrudan adresleyebileceği
x86 Ailesi 1 8085A,8088 ve 8086 2 Temel Mikroişlemci Özellikleri Mikroişlemcinin bir defade işleyebileceği kelime uzunluğu Mikroişlemcinin tek bir komutu işleme hızı Mikroişlemcinin doğrudan adresleyebileceği
8051 Ailesi MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur çekirdeğinin temel özellikkleri aşağıda verilmiştir:
 8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 1 Embedded C, C51 Temel Veri Tipleri Veri tipi (Data Type) Bit Bayt Değer bit 1 0, 1 char 8 1-128, +127 unsigned char 8 1 0,
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 1 Embedded C, C51 Temel Veri Tipleri Veri tipi (Data Type) Bit Bayt Değer bit 1 0, 1 char 8 1-128, +127 unsigned char 8 1 0,
Program Kodları. void main() { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }
 { trisb=0; portb=0; while(1) { portb.b5=1; delay_ms(1000); portb.b5=0; delay_ms(1000); } }") Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
Temrin1: PIC in PORTB çıkışlarından RB5 e bağlı LED i devamlı olarak 2 sn. aralıklarla yakıp söndüren programı yapınız. En başta PORTB yi temizlemeyi unutmayınız. Devre Şeması: İşlem Basamakları 1. Devreyi
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUARI MİKROİŞLEMCİLİ A/D DÖNÜŞTÜRÜCÜ
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUARI MİKROİŞLEMCİLİ A/D DÖNÜŞTÜRÜCÜ 1. Giriş Analog işaretler analog donanım kullanılarak işlenebilir. Ama analog
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUARI MİKROİŞLEMCİLİ A/D DÖNÜŞTÜRÜCÜ 1. Giriş Analog işaretler analog donanım kullanılarak işlenebilir. Ama analog
İçİndekİler. 1. Bölüm - Mİkro Denetleyİcİ Nedİr? 2. Bölüm - MİkroDenetleyİcİlerİ Anlamak
 XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
XIII İçİndekİler 1. Bölüm - Mİkro Denetleyİcİ Nedİr? Mikrodenetleyici Tanımı Mikrodenetleyicilerin Tarihçesi Mikroişlemci- Mikrodenetleyici 1. İki Kavram Arasındaki Farklar 2. Tasarım Felsefesi ve Mimari
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak #PIC enerjilendiğinde PORTA içeriğinin tersini PORTB de karşılık gelen biti 0 olacak
 # PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
# PIC enerjilendiğinde PORTB nin 0. biti 1 olacak - LIST=16F84 - PORTB yi temizle - BANK1 e geç - PORTB nin uçlarını çıkış olarak yönlendir - BANK 0 a geç - PORT B nin 0. bitini 1 yap - SON ;pic tanıtması
DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME
 DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME Ders 13, Slayt 2 1 TMR0 SAYICISI Ram belleğin h 01 adresi TMR0 adlı özel amaçlı bir saklayıcı olarak düzenlenmiştir. Bu saklayıcı bir sayıcıdır.
DERS 13 PIC 16F84 ile DONANIM SAYICI KULLANIMI İÇERİK KESME Ders 13, Slayt 2 1 TMR0 SAYICISI Ram belleğin h 01 adresi TMR0 adlı özel amaçlı bir saklayıcı olarak düzenlenmiştir. Bu saklayıcı bir sayıcıdır.
İÇİNDEKİLER 1. KLAVYE... 11 2. KLAVYE RB0... 19 3. KLAVYE RBHIGH... 27 4. 4 DİSPLAY... 31
 İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
İÇİNDEKİLER 1. KLAVYE... 11 Satır ve Sütunlar...11 Devre Şeması...14 Program...15 PIC 16F84 ile 4x4 klavye tasarımını gösterir. PORTA ya bağlı 4 adet LED ile tuş bilgisi gözlenir. Kendiniz Uygulayınız...18
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI
 PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
PİC HAKKINDA KISA KISA BİLGİLER GİRİŞ/ÇIKIŞ PORTLARI Bazı pinler çevre birimleri ile çoklanmıştır. Peki bu ne demek? Mesela C portundaki RC6 ve RC7 pinleri seri iletişim için kullanılır. Eğer seri iletişimi
Deney 2. Kesme Uygulamaları
 Deney 2 Kesme Uygulamaları Deneyin Amacı Kesme kavramının öğretilmesi Kesme, kesme isteği ve yazılım kesmesi kavramlarının anlaşılması Kesme hizmet programı geliştirme Titreşimsiz düğme kavramının irdelenmesi
Deney 2 Kesme Uygulamaları Deneyin Amacı Kesme kavramının öğretilmesi Kesme, kesme isteği ve yazılım kesmesi kavramlarının anlaşılması Kesme hizmet programı geliştirme Titreşimsiz düğme kavramının irdelenmesi
1. Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
1. Ders Giriş Hazırlayan: Arş. Gör. Hakan ÜÇGÜN Mikroişlemcili Sistem Uygulamaları Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim
MC6800. Veri yolu D3 A11. Adres yolu A7 A6 NMI HALT DBE +5V 1 2. adres onaltılık onluk 0000 0. 8 bit 07FF 2047 0800 2048. kullanıcının program alanı
 GİRİŞ Günümüzde kullanılan bilgisayarların özelliklerinden bahsedilirken duyduğumuz 80386, 80486 Pentium-III birer mikroişlemcidir. Mikroişlemciler bilgisayar programlarının yapmak istediği tüm işlerin
GİRİŞ Günümüzde kullanılan bilgisayarların özelliklerinden bahsedilirken duyduğumuz 80386, 80486 Pentium-III birer mikroişlemcidir. Mikroişlemciler bilgisayar programlarının yapmak istediği tüm işlerin
ĐŞARET ĐŞLEME (SIGNAL PROCESSING)
") ĐŞARET ĐŞLEME (SIGNAL PROCESSING) Modern ölçme sistemlerinde Đşaret Đşleme bloğunun yerini çoğunlukla bir PC almıştır. Söz konusu bloğun en önemli fonksiyonu, ölçülen fiziksel büyüklük elektriksel işarete
ĐŞARET ĐŞLEME (SIGNAL PROCESSING) Modern ölçme sistemlerinde Đşaret Đşleme bloğunun yerini çoğunlukla bir PC almıştır. Söz konusu bloğun en önemli fonksiyonu, ölçülen fiziksel büyüklük elektriksel işarete
TUŞ TAKIMI (KEYPAD) UYGULAMALARI
 UYGULAMALARI") 12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
12. Bölüm TUŞ TAKIMI (KEYPAD) UYGULAMALARI Tuş Takımı (Keypad) Hakkında Bilgi Tuş Takımı Uygulaması-1 74C922 Tuş Takımı Enkoder Entegresi Tuş Takımı Uygulaması-2 (74C922 İle) Bu bölümde tuş takımı diğer
EasyPic 6 Deney Seti Tanıtımı
 EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
EasyPic 6 Deney Seti Tanıtımı Power supply voltage regulator J6 ile power supply seçimi yapılır. USB seçilirse USB kablosu üzerinden +5V gönderilir, EXT seçilirse DC connector üzerinden harici bir power
C-Serisi PLC İleri Seviye Eğitim
 C-Serisi PLC İleri Seviye Eğitim 1 PLC ye Giriş 2 PLC ye Giriş 3 PLC ye Giriş CJ1 I/O Modülleri - 8/16/32/64pts Max I/O - 160,640 Max Program Kapasitesi - 20K Steps Komut sayısı - 400 4 PLC Ladder Diyagram
C-Serisi PLC İleri Seviye Eğitim 1 PLC ye Giriş 2 PLC ye Giriş 3 PLC ye Giriş CJ1 I/O Modülleri - 8/16/32/64pts Max I/O - 160,640 Max Program Kapasitesi - 20K Steps Komut sayısı - 400 4 PLC Ladder Diyagram
BÖLÜM 6 Seri Port Đşlemleri
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 6 Seri Port Đşlemleri Amaçlar Seri haberleşmenin önemini kavramak 8051 seri port kontrol saklayıcılarını öğrenmek Seri port çalışma modları hakkında bilgi
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 6 Seri Port Đşlemleri Amaçlar Seri haberleşmenin önemini kavramak 8051 seri port kontrol saklayıcılarını öğrenmek Seri port çalışma modları hakkında bilgi
MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 7 Kesmeler Kesme (Interrupt) Donanım işareti ile mikroişlemcinin program akışını değiştirme işlemine kesme denir. Kullanım amacı;
MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 7 Kesmeler Kesme (Interrupt) Donanım işareti ile mikroişlemcinin program akışını değiştirme işlemine kesme denir. Kullanım amacı;
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 Giriş/Çıkış Portlarının Kullanımı 8051 in Portları 8051 in çift yönlü çalışabilen 4 adet 8 hatlı portu vardır. Her porta SFR
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 Giriş/Çıkış Portlarının Kullanımı 8051 in Portları 8051 in çift yönlü çalışabilen 4 adet 8 hatlı portu vardır. Her porta SFR
Mikroişlemci Nedir? Mikrodenetleyici Nedir? Mikroişlemci iç yapısı Ders Giriş. Mikroişlemcili Sistem Uygulamaları
 Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
Mikroişlemcili Sistem Uygulamaları 1. Ders Giriş Dikkat ettiniz mi: Etrafımızdaki akıllı cihazların sayısı ne kadar da arttı. Cep telefonlarımız artık sadece iletişim sağlamakla kalmıyor, müzik çalıyor,
BÖLÜM 2 8051 Mikrodenetleyicisine Giriş
 C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
C ile 8051 Mikrodenetleyici Uygulamaları BÖLÜM 2 8051 Mikrodenetleyicisine Giriş Amaçlar 8051 mikrodenetleyicisinin tarihi gelişimini açıklamak 8051 mikrodenetleyicisinin mimari yapısını kavramak 8051
8051 Ailesi MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur çekirdeğinin temel özellikkleri aşağıda verilmiştir:
 8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
8051 Ailesi 8051 MCS51 ailesinin orijinal bir üyesidir ve bu ailenin çekirdeğini oluşturur. 8051 çekirdeğinin temel özellikkleri aşağıda verilmiştir: 1. Kontrol uygulamaları için en uygun hale getirilmiş
Mifare Kart Yazıcı/Okuyucu Modül (MFM-200)
") 2012 Mifare Kart Yazıcı/Okuyucu Modül (MFM-200) İstanbul Yazılım ve Elektronik Teknolojileri 01.01.2012 MFM-200 Mifare Kart Yazıcı/Okuyucu Modül Genel Özellikler Ürün Kodu MFM-200 Protokol ISO14443A, ISO15693
2012 Mifare Kart Yazıcı/Okuyucu Modül (MFM-200) İstanbul Yazılım ve Elektronik Teknolojileri 01.01.2012 MFM-200 Mifare Kart Yazıcı/Okuyucu Modül Genel Özellikler Ürün Kodu MFM-200 Protokol ISO14443A, ISO15693
Genel Kavramlar. Bilecik Şeyh Edebali Üniversitesi Gömülü Sistemler Ders Notları-2
 Genel Kavramlar Bilecik Şeyh Edebali Üniversitesi Gömülü Sistemler Ders Notları-2 ADC : Analog/Digital Converter ARM : Acorn RISC Machine CLK : Clock CPU : Central Processing Unit DAC : Digital / Analog
Genel Kavramlar Bilecik Şeyh Edebali Üniversitesi Gömülü Sistemler Ders Notları-2 ADC : Analog/Digital Converter ARM : Acorn RISC Machine CLK : Clock CPU : Central Processing Unit DAC : Digital / Analog
Paralel ve Seri İletişim. Asenkron/Senkron İletişim. Şekil 2: İletişim Modları
 Paralel ve Seri İletişim Şekil1a: Paralel İletişim Şekil1b. Seri iletişim Şekil 2: İletişim Modları Asenkron/Senkron İletişim PROTEUS/ISIS SANAL SERİ PORT ile C# USART HABERLEŞMESİ Seri iletişimde, saniyedeki
Paralel ve Seri İletişim Şekil1a: Paralel İletişim Şekil1b. Seri iletişim Şekil 2: İletişim Modları Asenkron/Senkron İletişim PROTEUS/ISIS SANAL SERİ PORT ile C# USART HABERLEŞMESİ Seri iletişimde, saniyedeki
DENEY-1. SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ
 DENEY-1 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY-1-1: BİT YÖNLENDİRMELİ KOMUTLAR İLE PİNLERE DEĞER GÖNDERME AMAÇ: Mikrodenetleyici pinlerine
DENEY-1 SABANCI ATL ÖĞRETMENLERİNDEN YAVUZ AYDIN ve UMUT MAYETİN'E VERDİKLERİ DESTEK İÇİN TEŞEKKÜR EDİYORUZ 31 DENEY-1-1: BİT YÖNLENDİRMELİ KOMUTLAR İLE PİNLERE DEĞER GÖNDERME AMAÇ: Mikrodenetleyici pinlerine
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI OLAYLARI ZAMANLAMA
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI OLAYLARI ZAMANLAMA İnsanların işlerini bir takvime ve zamana bağlı olarak yürütmesine benzer şekilde, bilgisayarlar
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI OLAYLARI ZAMANLAMA İnsanların işlerini bir takvime ve zamana bağlı olarak yürütmesine benzer şekilde, bilgisayarlar
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI OLAYLARI ZAMANLAMA
 İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI OLAYLARI ZAMANLAMA İnsanların işlerini bir takvime ve zamana bağlı olarak yürütmesine benzer şekilde, bilgisayarlar
İSTANBUL TİCARET ÜNİVERSİTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ MİKROİŞLEMCİLİ SİSTEM LABORATUVARI OLAYLARI ZAMANLAMA İnsanların işlerini bir takvime ve zamana bağlı olarak yürütmesine benzer şekilde, bilgisayarlar
SAYISAL MANTIK LAB. PROJELERİ
 1. 8 bitlik Okunur Yazılır Bellek (RAM) Her biri ayrı adreslenmiş 8 adet D tipi flip-flop kullanılabilir. RAM'lerde okuma ve yazma işlemleri CS (Chip Select), RD (Read), WR (Write) kontrol sinyalleri ile
1. 8 bitlik Okunur Yazılır Bellek (RAM) Her biri ayrı adreslenmiş 8 adet D tipi flip-flop kullanılabilir. RAM'lerde okuma ve yazma işlemleri CS (Chip Select), RD (Read), WR (Write) kontrol sinyalleri ile
MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 MSC-51 Ailesi MCS-51 Ailesi Ekim 2014 Yrd. Doç. Dr. Mustafa Engin 8051 in Blok Şeması 4 Denetim Hatları Veri Yolu DPTR P.C. 8051
MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı BÖLÜM 2 MSC-51 Ailesi MCS-51 Ailesi Ekim 2014 Yrd. Doç. Dr. Mustafa Engin 8051 in Blok Şeması 4 Denetim Hatları Veri Yolu DPTR P.C. 8051
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Alt Program Yapısı Alt programın çağrılması Alt program korunur alınır ;Argumanlar R12 R15 registerlarına atanir. call #SubroutineLabel SubroutineLabel:
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Alt Program Yapısı Alt programın çağrılması Alt program korunur alınır ;Argumanlar R12 R15 registerlarına atanir. call #SubroutineLabel SubroutineLabel:
BÖLÜM 7 XTAL2 XTAL1. Vss. Şekil Mikrodenetleyicisi osilatör bağlantı şekli. Bir Makine Çevrimi = 12 Osilatör Periyodu
 BÖLÜM 7 7. ZAMANLAYICI/SAYICI YAPISI: 7.1. Sistem Saat üreteci ve Makine Çevrimi Bilgi: Saat üreteci bir mikrodenetleyicinin fonksiyonlarını yerine getirebilmesi için gerekli olan saat darbelerini üreten
BÖLÜM 7 7. ZAMANLAYICI/SAYICI YAPISI: 7.1. Sistem Saat üreteci ve Makine Çevrimi Bilgi: Saat üreteci bir mikrodenetleyicinin fonksiyonlarını yerine getirebilmesi için gerekli olan saat darbelerini üreten
Alıcı Devresi; Sinyali şu şekilde modüle ediyoruz;
 Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
Bu e kitapta infrared iletişim protokolleri ile ilgili basit bir uygulamayı anlatmaya çalışacağım. Bunu yine bir mikrodenetleyici ile yapmamız gerekecek. Siz isterseniz 16f628a yı ya da ccp modülü olan
Sistem Programlama. Kesmeler(Interrupts): Kesme mikro işlemcinin üzerinde çalıştığı koda ara vererek başka bir kodu çalıştırması işlemidir.
: Kesme mikro işlemcinin üzerinde çalıştığı koda ara vererek başka bir kodu çalıştırması işlemidir.") Kesmeler(Interrupts): Kesme mikro işlemcinin üzerinde çalıştığı koda ara vererek başka bir kodu çalıştırması işlemidir. Kesmeler çağırılma kaynaklarına göre 3 kısma ayrılırlar: Yazılım kesmeleri Donanım
Kesmeler(Interrupts): Kesme mikro işlemcinin üzerinde çalıştığı koda ara vererek başka bir kodu çalıştırması işlemidir. Kesmeler çağırılma kaynaklarına göre 3 kısma ayrılırlar: Yazılım kesmeleri Donanım
PROJE RAPORU. Proje adı: Pedalmatik 1 Giriş 2 Yöntem 3 Bulgular 6 Sonuç ve tartışma 7 Öneriler 7 Kaynakça 7
 PROJE RAPORU Proje Adı: Pedalmatik Projemizle manuel vitesli araçlarda gaz, fren ve debriyaj pedallarını kullanması mümkün olmayan engelli bireylerin bu pedalları yönetme kolu (joystick) ile sol el işaret
PROJE RAPORU Proje Adı: Pedalmatik Projemizle manuel vitesli araçlarda gaz, fren ve debriyaj pedallarını kullanması mümkün olmayan engelli bireylerin bu pedalları yönetme kolu (joystick) ile sol el işaret
İLERI MIKRODENETLEYICILER. Ege Üniversitesi Ege MYO Mekatronik Programı
 İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı EK-A IDE, Program Geliştirme Araçları Geliştirme Araçları Keil C51 Yazılımı Geliştirme Araçları ISIS Programı ISIS/Proteus programı:
İLERI MIKRODENETLEYICILER Ege Üniversitesi Ege MYO Mekatronik Programı EK-A IDE, Program Geliştirme Araçları Geliştirme Araçları Keil C51 Yazılımı Geliştirme Araçları ISIS Programı ISIS/Proteus programı:
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI
 DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
DELTA PLC EĞİTİM SETİ KİTAPÇIĞI Beti Delta PLC Eğitim Seti üzerinde kullanılan donanımlar Delta marka DVP20SX211T Model PLC DVP16SP11T Genişleme yuvası DOP-B07S411 7 Operatör Paneli PLC CPU sunu üzerindeki
Melih Hilmi ULUDAĞ. Yazılım Mühendisi Mekatronik Mühendisi. a aittir.
 Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
Melih Hilmi ULUDAĞ Yazılım Mühendisi Mekatronik Mühendisi www.melihhilmiuludag.com a aittir. ÖZET Teknolojiyi kısaca bilimsel bilgiden yararlanarak yeni bir ürün geliştirmek, üretmek ve hizmet desteği
ASENKRON (Eş Zamanlı Olmayan) HABERLEŞME ARA YÜZEYİ
 HABERLEŞME ARA YÜZEYİ") ASENKRON (Eş Zamanlı Olmayan) HABERLEŞME ARA YÜZEYİ Arayüzey hem gönderici hem alıcı durumunda çalışır. Arayüzey kontrol register ına aktarılan bir kontrol byte ı ile başlangıç durumuna getirilir. Kontrol
ASENKRON (Eş Zamanlı Olmayan) HABERLEŞME ARA YÜZEYİ Arayüzey hem gönderici hem alıcı durumunda çalışır. Arayüzey kontrol register ına aktarılan bir kontrol byte ı ile başlangıç durumuna getirilir. Kontrol
Bölüm 5: İşlemci Zamanlaması. Operating System Concepts with Java 8 th Edition
 Bölüm 5: İşlemci Zamanlaması 5.1 Silberschatz, Galvin and Gagne 2009 Temel Kavramlar Çoklu programlama sayesinde CPU kullanımının optimize edilmesi CPU I/O İşlem Döngüsü Bir işlemin çalıştırılması birbirlerini
Bölüm 5: İşlemci Zamanlaması 5.1 Silberschatz, Galvin and Gagne 2009 Temel Kavramlar Çoklu programlama sayesinde CPU kullanımının optimize edilmesi CPU I/O İşlem Döngüsü Bir işlemin çalıştırılması birbirlerini
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI
 SİNYAL KONTROL UYGULAMASI") DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
DENEY 10-A : PIC 16F877 ile DARBE GENİŞLİK MODÜLASYONU (PWM) SİNYAL KONTROL UYGULAMASI AMAÇ: 1. Mikrodenetleyici kullanarak Darbe Genişlik Modülasyonu (PWM) sinyal üretilmesini öğrenmek 2. EasyPIC7 setinde
Proses. Prosesler 2. İşletim Sistemleri
 2 PROSESLER Proses Bir işlevi gerçeklemek üzere ardışıl bir program parçasının yürütülmesiyle ortaya çıkan işlemler dizisi Programın koşmakta olan hali Aynı programa ilişkinbirdenfazlaprosesolabilir. Görev
2 PROSESLER Proses Bir işlevi gerçeklemek üzere ardışıl bir program parçasının yürütülmesiyle ortaya çıkan işlemler dizisi Programın koşmakta olan hali Aynı programa ilişkinbirdenfazlaprosesolabilir. Görev
KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ
 KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ Nesneye Yönelik Programlama C++ ile Beaglebone Black de Bluetooth Haberleşmesi Danışman: Yrd. Doç. Dr. Mehmet YAKUT Sinan
KOCAELİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ Nesneye Yönelik Programlama C++ ile Beaglebone Black de Bluetooth Haberleşmesi Danışman: Yrd. Doç. Dr. Mehmet YAKUT Sinan
PROSESLER. Proses. Proses
 Proses 2 PROSESLER Bir işlevi gerçeklemek üzere ardışıl bir program parçasının yürütülmesiyle ortaya çıkan işlemler dizisi Programın koşmakta olan hali Aynı programa ilişkin birden fazla proses olabilir.
Proses 2 PROSESLER Bir işlevi gerçeklemek üzere ardışıl bir program parçasının yürütülmesiyle ortaya çıkan işlemler dizisi Programın koşmakta olan hali Aynı programa ilişkin birden fazla proses olabilir.
BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ
 BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ 3.1) Hi-Tech te CCP İşlemleri Pic içerisinde dahili olarak bulunan CCP modülü Copture (yakalama), Compare (karşılaştırma) ve PWM bölümlerinin baş harflerinin
BÖLÜM 3 CAPTURE/COMPARE/PWM ve TUŞ TAKIMI İŞLEMLERİ 3.1) Hi-Tech te CCP İşlemleri Pic içerisinde dahili olarak bulunan CCP modülü Copture (yakalama), Compare (karşılaştırma) ve PWM bölümlerinin baş harflerinin
İŞLETİM SİSTEMİ İşletim sistemi kullanıcıyla bilgisayar donanımı arasında iletişim sağlayan programdır.
 İŞLETİM SİSTEMİ İşletim sistemi kullanıcıyla bilgisayar donanımı arasında iletişim sağlayan programdır. Programların ve donanımların kullanılması için bir çalıştırılması platformu oluşturur. Sistemin yazılım
İŞLETİM SİSTEMİ İşletim sistemi kullanıcıyla bilgisayar donanımı arasında iletişim sağlayan programdır. Programların ve donanımların kullanılması için bir çalıştırılması platformu oluşturur. Sistemin yazılım
MTM 305 MİKROİŞLEMCİLER
 KARABÜK ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MTM 305 MİKROİŞLEMCİLER Arş. Gör. Emel SOYLU Arş. Gör. Kadriye ÖZ Basit Giriş/Çıkış Teknikleri IN ve OUT komutları X86 komut kümesi
KARABÜK ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ MEKATRONİK MÜHENDİSLİĞİ BÖLÜMÜ MTM 305 MİKROİŞLEMCİLER Arş. Gör. Emel SOYLU Arş. Gör. Kadriye ÖZ Basit Giriş/Çıkış Teknikleri IN ve OUT komutları X86 komut kümesi
İşletim Sistemlerine Giriş
 İşletim Sistemlerine Giriş İşletim Sistemleri ve Donanım İşletim Sistemlerine Giriş/ Ders01 1 İşletim Sistemi? Yazılım olmadan bir bilgisayar METAL yığınıdır. Yazılım bilgiyi saklayabilir, işleyebilir
İşletim Sistemlerine Giriş İşletim Sistemleri ve Donanım İşletim Sistemlerine Giriş/ Ders01 1 İşletim Sistemi? Yazılım olmadan bir bilgisayar METAL yığınıdır. Yazılım bilgiyi saklayabilir, işleyebilir
Mikrobilgisayar Donanımı
 KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ BĠLGĠSAYAR MÜHENDĠSLĠĞĠ BÖLÜMÜ MĠKROĠġLEMCĠ LABORATUARI Mikrobilgisayar Donanımı 1. GiriĢ Bu deneyde 16 bit işlemci mimarisine dayalı 80286 mikroişlemcisini kullanan DIGIAC
KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ BĠLGĠSAYAR MÜHENDĠSLĠĞĠ BÖLÜMÜ MĠKROĠġLEMCĠ LABORATUARI Mikrobilgisayar Donanımı 1. GiriĢ Bu deneyde 16 bit işlemci mimarisine dayalı 80286 mikroişlemcisini kullanan DIGIAC
Bölüm 1 Ürüne Genel Bakış
 Bölüm 1 Ürüne Genel Bakış 1.1 Ürün Etiketi Şekil 1-1 Etiket Model Instruction Model numarası bazı rakam ve harfler içerir. Bu işaretler cihazın gücünü, güç seviyesini ve bazı diğer özel bilgileri içerir.
Bölüm 1 Ürüne Genel Bakış 1.1 Ürün Etiketi Şekil 1-1 Etiket Model Instruction Model numarası bazı rakam ve harfler içerir. Bu işaretler cihazın gücünü, güç seviyesini ve bazı diğer özel bilgileri içerir.
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ
 EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Örnek 1: Kara Şimsek (İki LED) Soru: MSP430 LaunchPad te buluna iki LED i birer saniye aralıklarla sırayla yakıp söndüren programı yazınız. Kara Şimsek
EEM 306 Mikroişlemciler ve Lab. Doç.Dr. Mehmet SAĞBAŞ Örnek 1: Kara Şimsek (İki LED) Soru: MSP430 LaunchPad te buluna iki LED i birer saniye aralıklarla sırayla yakıp söndüren programı yazınız. Kara Şimsek
İşletim Sistemleri (Operating Systems)
") İşletim Sistemleri (Operating Systems) 1 İşletim Sistemleri (Operating Systems) Genel bilgiler Ders kitabı: Tanenbaum & Bo, Modern Operating Systems:4th ed., Prentice-Hall, Inc. 2013 Operating System Concepts,
İşletim Sistemleri (Operating Systems) 1 İşletim Sistemleri (Operating Systems) Genel bilgiler Ders kitabı: Tanenbaum & Bo, Modern Operating Systems:4th ed., Prentice-Hall, Inc. 2013 Operating System Concepts,
Ad Soyad: Öğrenci No:
 ADUC841 sayma değeri P3.4 (T0) osc E TH0 TL0 MOD Seçimi Taşma (overflow) TMOD 1. Giriş kaynağı kontrol GATE0 C/T0 M1 M0 3. Yenileme modu P3.2 (INT0) 2. Çalışma kontrol TCON TF0 TR0 Zamanlayıcı/Sayıcı-0
ADUC841 sayma değeri P3.4 (T0) osc E TH0 TL0 MOD Seçimi Taşma (overflow) TMOD 1. Giriş kaynağı kontrol GATE0 C/T0 M1 M0 3. Yenileme modu P3.2 (INT0) 2. Çalışma kontrol TCON TF0 TR0 Zamanlayıcı/Sayıcı-0
KONTROL VE OTOMASYON KULÜBÜ
 KONTROL VE OTOMASYON KULÜBÜ C DİLİ İLE MİKROKONTROLÖR PROGRAMLAMA EĞİTİMİ Serhat Büyükçolak Ahmet Sakallı 2009-2010 Güz Dönemi Eğitimleri Mikrokontrolör Gömülü sistemlerin bir alt dalı olan mikrokontrolör
KONTROL VE OTOMASYON KULÜBÜ C DİLİ İLE MİKROKONTROLÖR PROGRAMLAMA EĞİTİMİ Serhat Büyükçolak Ahmet Sakallı 2009-2010 Güz Dönemi Eğitimleri Mikrokontrolör Gömülü sistemlerin bir alt dalı olan mikrokontrolör
MEB YÖK MESLEK YÜKSEKOKULLARI PROGRAM GELİŞTİRME PROJESİ. 1. Tipik bir mikrobilgisayar sistemin yapısı ve çalışması hakkında bilgi sahibi olabilme
 PROGRAMIN ADI DERSIN KODU VE ADI DERSIN ISLENECEGI DÖNEM HAFTALIK DERS SAATİ DERSİN SÜRESİ ENDÜSTRİYEL ELEKTRONİK MİK.İŞLEMCİLER/MİK.DENETLEYİCİLER-1 2. Yıl, III. Yarıyıl (Güz) 4 (Teori: 3, Uygulama: 1,
PROGRAMIN ADI DERSIN KODU VE ADI DERSIN ISLENECEGI DÖNEM HAFTALIK DERS SAATİ DERSİN SÜRESİ ENDÜSTRİYEL ELEKTRONİK MİK.İŞLEMCİLER/MİK.DENETLEYİCİLER-1 2. Yıl, III. Yarıyıl (Güz) 4 (Teori: 3, Uygulama: 1,
BÖLÜM 4 KAREKTER LCD ve ADC İŞLEMLERİ
 BÖLÜM 4 KAREKTER LCD ve ADC İŞLEMLERİ 4.1) Hi-Tech te Karekter LCD İşlemleri Şekil-37 de bir örneği görülen karakter LCD ler dışarıya bilgi aktarmak için kullanılan en yaygın birimlerdendir. Genel itibari
BÖLÜM 4 KAREKTER LCD ve ADC İŞLEMLERİ 4.1) Hi-Tech te Karekter LCD İşlemleri Şekil-37 de bir örneği görülen karakter LCD ler dışarıya bilgi aktarmak için kullanılan en yaygın birimlerdendir. Genel itibari
T.C. RC SERVO MOTOR KONTROLÜ
 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ BİLGİSAYAR MÜHENDİSLİĞİ BÖLÜMÜ RC SERVO MOTOR KONTROLÜ İBRAHİM ALİ METİN BİLECİK 30 Mart 2015 T.C. BİLECİK ŞEYH EDEBALİ ÜNİVERSİTESİ MÜHENDİSLİK
Code Composer Studio İndirilmesi ve Kurulması
 BÖLÜM 2: 2.1. STELARIS KART GENEL BİLGİ VE CODE COMPOSER STUDIO: Code Composer Studio İndirilmesi ve Kurulması 1. Aşağıdaki linkten Code Composer Studio yu indirebilirsiniz: http://processors.wiki.ti.com/index.php/download_ccs
BÖLÜM 2: 2.1. STELARIS KART GENEL BİLGİ VE CODE COMPOSER STUDIO: Code Composer Studio İndirilmesi ve Kurulması 1. Aşağıdaki linkten Code Composer Studio yu indirebilirsiniz: http://processors.wiki.ti.com/index.php/download_ccs
MİKROBİLGİSAYAR SİSTEMLERİ VE ASSEMBLER
 BÖLÜM 2 INTEL AİLESİNİN 8 BİTLİK MİKROİŞLEMCİLERİ 2.1 8080 MİKROİŞLEMCİSİ Intel 8080, I4004, I4040 ve I8008 in ardından üretilmiştir ve 8 bitlik mikroişlemcilerin ilkidir ve 1974 te kullanıma sunulmuştur.
BÖLÜM 2 INTEL AİLESİNİN 8 BİTLİK MİKROİŞLEMCİLERİ 2.1 8080 MİKROİŞLEMCİSİ Intel 8080, I4004, I4040 ve I8008 in ardından üretilmiştir ve 8 bitlik mikroişlemcilerin ilkidir ve 1974 te kullanıma sunulmuştur.
BBM 231 Yazmaçların Aktarımı Seviyesinde Tasarım! Hacettepe Üniversitesi Bilgisayar Müh. Bölümü
 BBM 231 Yazmaçların Aktarımı Seviyesinde Tasarım! Hacettepe Üniversitesi Bilgisayar Müh. Bölümü Bu derste! Büyük, karmaşık sayısal sistemlerin tasarımı ele alınacaktır. ASM ve ASMD çizgeleri Tasarım Örnekleri
BBM 231 Yazmaçların Aktarımı Seviyesinde Tasarım! Hacettepe Üniversitesi Bilgisayar Müh. Bölümü Bu derste! Büyük, karmaşık sayısal sistemlerin tasarımı ele alınacaktır. ASM ve ASMD çizgeleri Tasarım Örnekleri
Cnc Designer. ZSynthesizer. ZSynthesizer Doküman No: 0001
 Cnc Designer ZSynthesizer ZSynthesizer Doküman No: 0001 Cnc Designer 12/1/2015 Contents ZSynthesizer Çipi Hakkında... 1 Çip Bağlantıları... 2 SPI Parametreleri... 4 Flag Değeri... 5 Frekans hesaplaması...
Cnc Designer ZSynthesizer ZSynthesizer Doküman No: 0001 Cnc Designer 12/1/2015 Contents ZSynthesizer Çipi Hakkında... 1 Çip Bağlantıları... 2 SPI Parametreleri... 4 Flag Değeri... 5 Frekans hesaplaması...
MİKROİŞLEMCİLER LABORATUVARI İÇİN PROGRAM DERLEME VE YÜKLEME DOKÜMANI
 MİKROİŞLEMCİLER LABORATUVARI İÇİN PROGRAM DERLEME VE YÜKLEME DOKÜMANI İÇİNDEKİLER GİRİŞ:... 2 RS232 den USB ye Dönüştürücü Kurulumu... 2 KEIL Programı ile Program Yazma ve Derleme... 5 Atmel Flip Programı
MİKROİŞLEMCİLER LABORATUVARI İÇİN PROGRAM DERLEME VE YÜKLEME DOKÜMANI İÇİNDEKİLER GİRİŞ:... 2 RS232 den USB ye Dönüştürücü Kurulumu... 2 KEIL Programı ile Program Yazma ve Derleme... 5 Atmel Flip Programı
LPC1769 ile 8 Temel Uygulama
 LPC1769 ile 8 Temel Uygulama Bu uygulama notunun amacı, temel seviyede gömülü sistem bilgisi olan arkadaşlara 32 bit ARM Cortex-M3 tabanlı NXP firmasına ait olan LPC1769 hakkında bilgi vermek, temel seviyede
LPC1769 ile 8 Temel Uygulama Bu uygulama notunun amacı, temel seviyede gömülü sistem bilgisi olan arkadaşlara 32 bit ARM Cortex-M3 tabanlı NXP firmasına ait olan LPC1769 hakkında bilgi vermek, temel seviyede
BİLGİSAYAR BİLİMİ DERSİ (KUR-2)
") BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
BİLGİSAYAR BİLİMİ DERSİ (KUR-2) ROBOT PROGRAMLAMA 2.1.1. Robot Mimarisi 2.1.2. Robot Türleri ve Eğitsel Amaçlı Robotlar 2.1.3. Eğitsel Robotta Mekanik Bileşenler 2.1.4. Eğitsel Robotta Elektromekanik Bileşenler
Bölüm 13: Giriş-Çıkış (I/O) Sistemleri
 Sistemleri") Bölüm 13: Giriş-Çıkış (I/O) Sistemleri Mehmet Demirci tarafından çevrilmiştir. Silberschatz, Galvin and Gagne 2013 Bölüm 13: Giriş-Çıkış (I/O) Sistemleri Genel bakış I/O donanımı Uygulama I/O arayüzü Çekirdek
Bölüm 13: Giriş-Çıkış (I/O) Sistemleri Mehmet Demirci tarafından çevrilmiştir. Silberschatz, Galvin and Gagne 2013 Bölüm 13: Giriş-Çıkış (I/O) Sistemleri Genel bakış I/O donanımı Uygulama I/O arayüzü Çekirdek
Arduino Temel Bilgiler
 Bu e-kitap Arduino ile proje geliştirmek isteyenler için temel bilgiler içermektedir. Arduino Temel Bilgiler Şevket Yılmaz Yazılım Mühendisi sevket-yilmaz@windowslive.com ARDUİNO NEDİR? Arduino bir mikro
Bu e-kitap Arduino ile proje geliştirmek isteyenler için temel bilgiler içermektedir. Arduino Temel Bilgiler Şevket Yılmaz Yazılım Mühendisi sevket-yilmaz@windowslive.com ARDUİNO NEDİR? Arduino bir mikro
Bu derste! BBM 231 Yazmaçların Aktarımı Seviyesinde Tasarım! Yazmaç Aktarımı Düzeyi! Büyük Sayısal Sistemler! 12/25/12
 BBM 231 Yazmaçların Aktarımı Seviyesinde Tasarım! Hacettepe Üniversitesi Bilgisayar Müh. Bölümü Bu derste! Büyük, karmaşık sayısal sistemlerin tasarımı ele alınacaktır. ASM ve ASMD çizgeleri Tasarım Örnekleri
BBM 231 Yazmaçların Aktarımı Seviyesinde Tasarım! Hacettepe Üniversitesi Bilgisayar Müh. Bölümü Bu derste! Büyük, karmaşık sayısal sistemlerin tasarımı ele alınacaktır. ASM ve ASMD çizgeleri Tasarım Örnekleri
DOKUMANLAR
 DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
DOKUMANLAR https://www.pickat.org Bu belgeyi yukarıdaki karekodu telefonunuza taratarak veya aşağıdaki linkten indirebilirsiniz. Link sürekli güncellenmektedir. https://drive.google.com/file/d/1wyi3ejzvge9vbu0ujklajnsjukbfldv/view?usp=sharing
MİKROBİLGİSAYAR SİSTEMLERİ. Teknik Bilimler Meslek Yüksekokulu
 MİKROBİLGİSAYAR SİSTEMLERİ Teknik Bilimler Meslek Yüksekokulu Dersin Amacı Mikroişlemciler Mikrodenetleyiciler PIC Mikrodenetleyiciler Micro BASIC Programlama Kullanılacak Programlar MSDOS DEBUG PROTEUS
MİKROBİLGİSAYAR SİSTEMLERİ Teknik Bilimler Meslek Yüksekokulu Dersin Amacı Mikroişlemciler Mikrodenetleyiciler PIC Mikrodenetleyiciler Micro BASIC Programlama Kullanılacak Programlar MSDOS DEBUG PROTEUS