AVİYONİK SİSTEMLER Sunan: Mustafa Ümit ÖNER
|
|
|
- Irmak Durmaz
- 9 yıl önce
- İzleme sayısı:
Transkript


1 AVİYONİK SİSTEMLER Sunan: Mustafa Ümit ÖNER 1

 3.7.")
2 1. Uçuş Kontrol 1.1. Uçağın 3 Temel Hareketi 1.2. Temel Uçuş Kontrol Yüzeyleri 1.3. İkincil Uçuş Kontrol Yüzeyleri 2. Aviyonik nedir? 2.1. İlk Uçuşun Özellikleri 2.2. Gece Uçuşu 3. Haberleşme Sistemleri 3.1. Frekans Atama Çizelgesi 3.2. Frekans/Genlik Kipleme 3.3. VHF Haberleşme 3.4. HF Haberleşme 3.5. UHF Haberleşme 3.6. İç Haberleşme Sistemi (ICS/Intercom) 3.7. Uydu Haberleşme (Satellite Communications-SatCom) 3.8. Hava Aracı Haberleşme ve Raporlama Sistemi (ACARS) 3.9. Acil Durum Yer Tespit Ünitesi (ELT) 4. Seyrüsefer Sistemleri 4.1. Cayrolar 4.2. İvme Ölçer 4.3. Eylemsizlik Temelli Seyrüsefer Sistemi 4.4. Durum ve Baş Açısı Referans Sistemi 4.5. Manyetik Pusula 4.6. Pito-Statik Sistem ve Hava Veri Bilgisayarı 4.7. Radyo Seyrüsefer 4.8. Transponder 4.9. IFF Radar Altimetre Uydu Seyrüsefer (GPS/SatNav) 5. Gösterge, Kayıt ve Kontrol Sistemleri 5.1. Elektronik Uçuş Ekipman Sistemi (EFIS) 5.2. CDU 5.3. UFCP 5.4. Kokpit Ses Kaydedici ve Uçuş Bilgisi Kaydedici (CVR and FDR) 5.5. Hava Durumu Tespiti (Weather Detection) 5.6. Trafik Uyarı Sistemi ve Çarpışma Önleyici Sistem (TCAS) 6. Aviyonik Sistem Mimarileri 6.1. Aviyonik Mimari Çeşitleri 7. Aviyonik Mimarilerde En Çok Kullanılan Arayüzler 7.1. ARINC MIL-STD 1553B 8. Kaynakça 2

3 3

4 Sapma (Yaw) Hareketi: Uçağın düşey ekseni (sarı eksen) etrafındaki dönme hareketidir. Yatma (Roll) Hareketi: Uçağın uzunlamasına ekseni (kırmızı eksen) etrafındaki dönme hareketidir. Yunuslama (Pitch) Hareketi: Uçağın yanal ekseni (mor eksen) etrafındaki dönme hareketidir. 4
 Hareketi: Uçağın yanal ekseni (mor")
5 Hava akımına karşı durarak hava akımını bozan ve böylece iki yüzeyi arasında oluşan basınç farkıyla uçağa yön veren hareketli yüzeylerdir. Birincil Etkiler: Dümen (Rudder): Sağa ve sola hareketiyle uçağa sapma hareketi yaptırır. İrtifa Dümeni (Elevator): İki adet irtifa dümeni birlikte yukarı ve aşağı hareket ederek uçağın yunuslama hareketini kontrol ederler. Kanatçık/Yatırgaç (Aileron): Kanatçıklar birbiriyle zıt yukarı aşağı hareket ederek yatma hareketini kontrol ederler. 5

6 Kanatçıkların Hareketlerinin İkincil Etkileri Kanatçıklar uçağın kanatlarındaki kaldırma kuvvetini değiştirerek uçağa yatma hareketi sağlar. Bunu sağlarken uçak aynı zamanda ters yönde bir direnç hisseder ve bu direncin etkisiyle oluşan dönme momenti burnu ters yönde saptırır. Bu olay hafif ve uzun kanatlı uçaklarda daha etkili olur. Dümen Hareketinin İkincil Etkileri Dümen hareket ettirildiğinde kanatların biri diğerine göre daha hızlı hareket eder ve kanatlara etkiyen kaldırma kuvveti değişir. Dümenin genellikle uçağın ağırlık merkezinden yukarda olması da dönme momentini kuvvetlendirir ; bu da uçağın yatmasına sebep olur. Özellikle hafif uçaklarda bu etkiyi azaltmak için dümen ve yatırgaçlar birlikte kullanılır. 6

7 Uçak Fren Kanadı (Spoiler): Uçak kanadında hava akışını bozarak sürtünmenin artmasını ve uçağın çok hızlanmadan irtifa kaybetmesini sağlar. Flap (Flap): Kanat eğimini arttırarak maksimum taşıma katsayısını yükseltirler. Özellikle inişlerde hızı düşürürken uçağa etkiyen kaldırma kuvvetinin yetersiz kalıp düşmesini (stall) engellemek için ve kalkışı kolaylaştırmak için kullanılırlar. Hücum Çıtası (Slat): Kanadın hücum kenarında bulunan ve kanat yüzey alanı ile eğimini arttırarak daha fazla taşıma sağlayan kanat elemanlarıdır. Özellikle stall hızına yakın hızlarda hareket ederken kullanılırlar. İnişlerde ve kalkışlarda yardımcı elemanlardır. 7
: Kanadın hücum kenarında bulunan ve kanat yüzey alanı ile eğimini arttırarak daha fazla taşıma sağlayan kanat elemanlarıdır.")
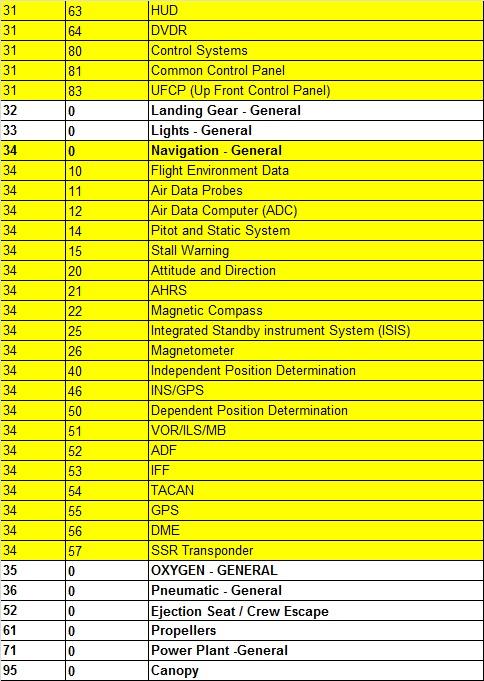
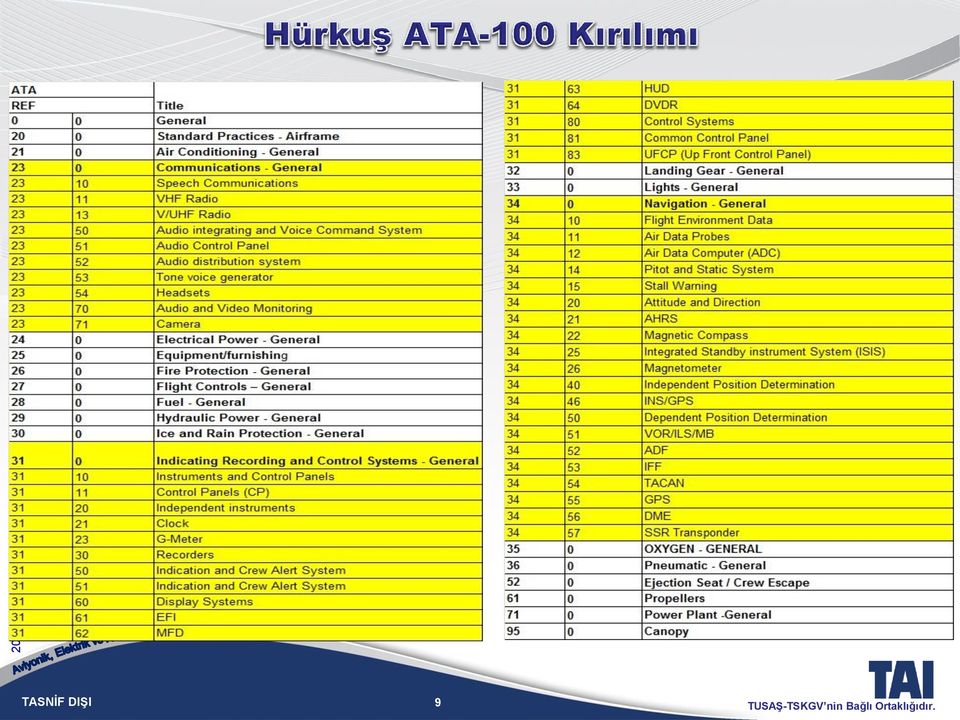
8 Avionics = Aviation + Electronics (Havacılık elektroniği) Hava araçlarında kullanılan haberleşme, seyrüsefer, göstergekayıt-kontrol sistemleri gibi sistemleri oluşturan elektronik ekipman ve sistemlerin tümüne aviyonik denir. Aviyonik sistemleri çeşitli şekillerde sınıflandırmak mümkündür. Kabul gören sınıflandırmalardan birisi de ATA (Air Transport Association)-100 kırılımıdır. 8

9 9

10 İlk motorlu ve kontrollü uçuş İlk gösterge panosu Anemometre Rüzgar hızını ölçen bir alettir. Kronometre Devir-dakika saati İlk uçuşta kullanılan anemometre 10


11 Turn and bank indicator Uçağın sağa/sola dönüş ve yatışını gösterir Earth inductor compass Uçağın belli bir yönden sapmasını gösterir Turn and bank indicator 11


12 12

13 13

14 Kipleme (modulation): Taşıyıcı sinyalin bazı özelliklerinin aktarılmak istenen bilgiyi kodlayacak şekilde işlenmesi işidir. Aktarılmak istenen veri bir taşıyıcı sinyal üstüne kodlanır. Taşıyıcı sinyalin frekans seçimi: Sinyalin ortamdaki yayılma koşullarına Frekans bandının kullanım kısıtlarına Aktarılacak veri ile ilgili kısıtlara (veri aktarım hızı ve güvenilirliği) bağlıdır. Sinyal kipleme çeşitli şekillerde yapılabilir. Analog-Analog Dönüşüm AM (Amplitude Modulation) Dijital-Analog Dönüşüm ASK (Amplitude Shift Keying) FM (Frequency Modulation) FSK (Frequency Shift Keying) PSK (Phase Shift Keying) 14
 bağlıdır. Sinyal kipleme çeşitli şekillerde yapılabilir.")
15 Sinyal kipleme yöntem seçimini etkileyen faktörler: Verinin aktarılacağı mesafe Çalışılan frekans ve yayılım özellikleri Spektral verimlilik Ekipman ve bütçe kısıtlamaları Veri hızı Düzenlemelerin getirdiği kısıtlamalar PSK Kipleme Örneği 15

16 İletilmek istenen sinyalin yüksek frekanslı bir taşıyıcı üstüne taşıyıcının genliğini değiştirerek kodlanmasına genlik kipleme (AM) denir. Genellikle radyo sinyallerinin İletiminde kullanılır. İletilmek istenen sinyalin yüksek frekanslı bir taşıyıcı üstüne taşıyıcının frekansı değiştirerek kodlanmasına frekans kipleme (FM) denir. Genellikle radyo ve televizyon sinyallerinin iletiminde kullanılır. 16
 denir.")
17 Genlik Kipleme Genlik üzerinden kodlama yapılır Uygulanması basittir Hava koşullarından (genlik) çok etkilenir Sinyal kalitesi düşüktür Frekans Kipleme Frekans üzerinden kodlama yapılır Uygulanması daha karmaşıktır Hava koşullarından (frekans) daha az etkilenir Sinyal kalitesi daha yüksektir Katedilen yol arttıkça sinyal kalitesi düşer Katedilen yol sinyal kalitesini çok etkilemez 17

18 Deniz aşırı yolculuklarda VHF in haberleşme alanı yeterli olmadığı için HF haberleşme kullanılır Frekans aralığı:2 30 MHz Yaklaşık 3000 km dahilinde haberleşme sağlar 18

19 Denizaşırı yolculuklarda iyon küreyi kullanarak haberleşme sağlar Yeryüzü koşullarından çok etkilenmez Ses kalitesi VHF haberleşmeye göre daha düşüktür 19

20 İyonkürenin değişkenliğinden ve hava şartlarından çok etkilenir Dalgaboyu uzun olduğu için uzun anten kullanılır, kullanımı zordur Değişik frekanslarda sistemin empedansı değiştiği için anten eşleştirme (antenna coupling) gerekir Antenna Coupling: Maksimum güç transferi için, girilen frekansta anten empedansının almaç/göndermeç (transceiver) ünitesinin empedansına eşlenmesi işidir 20
 ünitesinin empedansına eşlenmesi")

21 Tek yan bant HF radyo sinyalleri genlik kipleme (AM) yöntemiyle iletilir Genlik kiplemeli göndermeç 3 ana parça üretir Taşıyıcı Üst yan bant (USB) Alt yan bant (LSB) Gönderilecek olan bilgi taşıyıcıdan bağımsız olarak sadece yan bantlarda bulunur. Taşıyıcı sadece yan bantların oluşturulmasından sorumludur. Yan bantlar oluşturulduktan sonra taşıyıcıdan bağımsız olarak yayılabilirler. 21
22 Yan bantlar (sidebands) taşıyıcıdan bağımsız hareket ederler ve aynı bilgiyi taşırlar. Haberleşmenin sağlanması için bir banttaki bilginin aktarımı yeterlidir Bütün gönderici gücünün tek bant üstünde yoğunlaştırılması sonucu güçlü bir sinyal elde edilir (Tek yan bantta 400 watt /Çift yan bantta 125 watt) Bu sinyal en kötü hava koşullarında bile iyi bir haberleşme sağlar 22
23 Okyanus ötesi uçuşlar esnasında yer istasyonları ile iletişim HF haberleşme sistemleri ile sağlanmaktadır. HF sistemler gürültülü ses iletimi yaptığı için ve gönderilen mesajların çoğu başka hava araçlarınına yönelik olduğundan pilot sürekli bu rahatsız edici seslere maruz kalmamak için ses çıkışını kapatır. Uçağa yönelik mesajların ise dinlenebilmesi gerekir. Bu sesleri ayırt edip yabancı sesleri engelleyen sistem SELCAL sistemidir. SELCAL Kabul edilmez A Uçağına Mesaj B Uçağına B Uçağı C Uçağına Kabul edilmez 23

24 Uçakların gelen mesajın kendilerine ait olup olmadığını anlamaları için kendilerine ait 4 harften oluşan (A dan S e kadar I,N,O hariç) SelCal kodları bulunur.bu harfler ses tonları ile kodlanır ve ikili çiftler halinde aralarında 0.2 saniye arayla birer saniye boyunca gönderilirler. NOT: Aynı SelCal kodu birden fazla uçağa atanabilir fakat karışıklıkları önlemek amacıyla bu atama birbirinden uzak uçaklara veya farklı frekansta kanallar kullanan uçaklara yapılır. Eğer pilot başka uçağa ait bir mesaj aldığını anlarsa bunu yer istasyonuna bildirmekle yükümlüdür. 24
25 SelCal-I SelCal-II Reset SelCal Kontrol Paneli Sesli Uyarı Cihazı SelCal çözümleyici uçağa ait kodu aldığı zaman SelCal kontrol panelindeki SelCal lambasını yakar ve pilota sesli uyarı verir. Pilot bu uyarının farkına vardıktan sonra sistemi bir sonraki uyarıya hazır hale getirmek için reset tuşuna basar ve sistem bir sonraki uyarıya hazırlanır. 25
26 Hava Trafik Kontrol (ATC) amaçlı konuşmalarda ve Hava Aracı Haberleşme ve Raporlama Sistemi (ACARS) amaçlı operasyonlarda kullanılır Kanal Aralığı (Channel Spacing): Frekans bandındaki kanal sayısının arttırmak amacıyla iki kanal arasındaki frekans aralığının belirlenmesidir. Line of sight (görüş alanı) haberleşme yaklaşık 200 km Frekans Bandı (MHz) Kipleme Türü Kanal Aralığı (khz) FM AM (Sadece Alıcı) AM 8.33/ AM FM (Denizcilik) 25 26
27 numaralı uçak her iki istasyonun da görüş alanında olduğu için ikisinden (A ve B) de alabilir. 2 numaralı uçak sadece A istasyonundan veri alırken 3 numaralı uçak hiç veri alamamaktadır. 27
28 VHF HABERLEŞME Avantajları Hava koşullarından HF haberleşmeye göre daha az etkilenir HF haberleşmeye göre daha temiz bir ses sağlar Dezavantajları Yeryüzü koşullarından HF haberleşmeye göre daha çok etkilenir Haberleşme mesafesi HF haberleşmeye göre daha kısadır Elektrikli aletlerle etkileşimi daha azdır 28
29 Squelch: Kokpite aktarılacak minimum ses seviyesini belirlemek için kullanılır PTT (Push to Talk ): Bas konuş özelliği sağlar Audio Control Panel ICS ile ortak olarak kullanılır. 29
30 VDR (Vhf Data Radio) Dijital veri iletimini sağlar Daha etkili iletişim sağlar Yanlış anlaşılmaları engeller VDL (Vhf Datalink) Hem ses hem de dijital veri aktarımını sağlar Radio Management System CDU (Control Display Unit) aracılığı ile pilotun uçaktaki bazı araçların frekanslarını kontrol etmesini sağlar VOR, ADF, DME, Transponder Pilot sadece CDU ile etkileşim halindedir. 30
31 UHF Bandı: MHz UHF haberleşme askeri uçaklarda MHz frekans aralığında yaygın olarak kullanılan bir haberleşme çeşididir. 25 khz kanal aralığı kullanılır. AM veya FM kullanılabilir. Hava-hava ve hava-yer haberleşmelerinde kullanılır. 31
32 Alıcı ile verici arasında engel olmamalıdır. Bu yüzden menzili düşüktür ve verici gücüne bağlı olarak değişir. Atmosferik gürültüden HF ve VHF haberleşmeye göre daha az etkilenir. Bundan dolayı hassas haberleşmeler için uygundur. İyonosfer yansımaları yok denecek kadar azdır. Bu yüzden menzili kısadır. Elektronik karıştırmaya karşı önlemli sistemlerde kullanılmaktadır. 32
33 «Have Quick» UHF sesli haberleşmelerde sistemi dışardan etkilere karşı koruma amaçlı bir güvenlik sistemidir. Bu sistemde haberleşme frekansı hem alıcı hem de verici ucunda saniyede birkaç kez rastgele değiştirilerek sistem dış etkilere karşı korumaya alınır. Bir frekansta kalınan süre de rastgele değiştirilerek daha fazla güvenlik sağlanır. Bu sistemde frekans atlamalı korumalı iletişimin sağlanması için hem alıcı kısmının hem de verici kısmının bazı bilgilere sahip olması gerekir: WOD (Word of Day) TOD (Time of Day) Net Number 33
34 WOD (Word of Day) Sisteme frekans atlama şablonunu, hangi frekansta ne kadar kalınacağını ve frekans değişim sıklığını belirten kodtur. Elle veya elektronik sistemler aracılığıyla yüklenebilir TOD (Time of Day) Günün değişik zaman dilimlerinde değişik frekanslar kullanıldığı için kullanıcılar arasında zaman bilgisinin tutarlı olması gerekir. Yaygın olarak kullanılan zaman referans sistemi UTC (Coordinated Universal Time) dir Net Number WOD numarasına göre takip edilecek olan frekans tablosunu ve bu tabloya girişin hangi frekansla yapılacağını belirleyen numaradır. NOT: «Have Quick» sistemler konferans özelliğine de sahiptir. Aynı bilgilere sahip üçüncü bir radyo terminali bu sisteme dahil olabilir. 34
35 Pilotlar arasında ve pilot ile yer görevlisi arasındaki iletişimi sağlayan sistemdir. Ses Kontrol Seçici Paneller (Audio Control Selector Panel) vasıtasıyla bu iletişim sağlanır. ICS sistemi aslında bu panellerin çift yönlü INPH (interphone) kablolarıyla birbirine bağlanmasından oluşur. 35
36 Kokpitteki ses kontrolünü sağlayan paneldir. Sadece iç haberleşmeyi sağlamaz; aynı zamanda kokpite bağlanan diğer radyo cihazlarının da ses kontrolünü sağlar. Pilotların kulaklık ve mikrofon fonksiyonlarını sağlar. Pilotun mikrofonu, iş yükünü azaltacak şekilde ses aktive özelliğe sahiptir. Kokpit ses kaydediciye veri sağlar. 36
37 Dynamic VOX (DVOX) Fonksiyonu İç iletişim sistemine karışan gürültünün belli bir seviyenin altında tutulmasını sağlamaktadır. Seçilen eşik değerin altındaki sesleri sisteme aktarmamaktadır. VOX kontrol butonunun saat yönünde tam çevrilmesine VOX-Hot (Hot- MIC); saat yönünün tersine tam çevrilmesine VOX-Cold (Cold-MIC) pozisyonu denir. Hot-MIC: Gürültü eşik değerinin en düşük seviyeye çekildiği pozisyondur. Neredeyse her ses sisteme aktarılmaktadır. Cold-MIC: İç haberleşme artık otomatik olarak sesle aktive olmaz bas-konuş (PTT) özelliği kazanır. NOT: Pilotun yerle olan diğer radyolar üzerindeki haberleşmeleri de bas-konuş özelliktedir. Call Fonksiyonu İç haberleşme ses seviyesini yükseltip diğer alıcılardan gelen ses seviyesini düşürerek iç haberleşmeyi ön plana çıkarır. 37
38 Atmosferik etkileşim gözlenmez Kısıtlı bant genişliği söz konusu değildir Elektriksel gürültü ve hava koşullarından etkilenmez Dijital sinyaller kullanılır Hem bilgi hem ses aktarımına elverişlidir Ses sinyallerinin şifrelenmesini desteklemektedir HF / VHF haberleşmelere alternatif gösterilmektedir 38
39 39
40 4 adet Inmarsat uydusu bulunmaktadır Pacific Ocean Region (POR) Indian Ocean Region (IOR) Atlantic Ocean Region-West (AOR-W) Atlantic Ocean Region-East (AOR-E) Yörüngelerde 4 adet de yedek uydu bulunmaktadır. Herhangi bir arıza durumunda kesintiyi önlemek amacıyla ana uydunun işlevlerini yüklenir Uydulara enerji güneş pilleri ve akülerle sağlanmaktadır 40

41 41
42 Satellite Data Unit (SDU) Antenleri konumlandırmak, uydu seçmek ve ATC ye rapor vermek için seyrüsefer sistemlerinden bilgi alır Her türlü bilginin ve protokollerin işlenmesini, dijital kodlamaların ve çözümlemelerin yapılmasını sağlar Radio Frequency Unit (RFU) Gönderime hazır bilginin frekansının orta sınıftan L-banda yükseltilerek HPA ya (High Power Amplifier) iletimini sağlar Gelen sinyallerin de yüksek frekanstan orta sınıfa indirgenmesini sağlar Low Noise Amplifier Antenden gelen zayıf radyo sinyallerinin güçlendirilmesini sağlar Beam Steering Unit (BSU) Antenin sürekli uyduya dönük konumlandırılmasını sağlar 42
43 Uydu Haberleşme Anteni Low Gain Antenna Düşük veri transfer hızlarında (600 bits per second) çalışır (Ör: Hava Trafik Kontrol (ATC) ) Maliyeti ucuzdur High Gain Antenna Çok kanallı ses, veri, faks ve internet erişimi sağlar Veri aktarım hızı yüksektir (64 kbits per second) Yüksek kazanım anten dizgilerinden oluşan sistemin uyduya yönlendirilmesi ile elde edilir 43
44 Yer istasyonu anteni 4-6 GHz frekans aralığında Sat-Com bandında çalışır Ses dijital kodlama ile yollanır. Böylece hataların önüne geçilir ve yüksek ses kalitesi elde edilir. 44
45 Hava aracı ile havacılık şirketi arasındaki haberleşmeyi sağlar (AOC: Airline Operational Control) Hava trafik kontrol üniteleri ile de bilgi alışverişinde bulunabilir (ATC: Air Traffic Control) Hava trafik kontrol, aynı hava sahasında uçan uçakların güvenli bir şekilde dizilimlerini sağlayacak rota, irtifa, radar takip, hava durumu gibi bilgileri uçaklara ileten ve uçaklardan bazı bilgiler alan birimdir. 45
 ve SITA (Avrupa) organizasyonları tarafından işletilmektedir.")
46 Bu sistem aracılığıyla motorların uçuş anındaki performansı gibi havacılık şirketini ilgilendiren ekstra veriler de aktarılabilmekte ve problemler daha önceden farkedilip önlemler alınabilmektedir. Bu sistemi destekleyen uzay ve yer istasyonları ARINC (Kuzey Amerika) ve SITA (Avrupa) organizasyonları tarafından işletilmektedir. Bu sistem sensörler sayesinde otomatik veri gönderimi sağlayarak pilotun iş yükünü azaltmaktadır. 46
47 Adres Mesaj Dizin Kontrol Adres: Hava aracının adres bilgisini içerir. Adres bilgisi uçağın uçus numarası veya kuyruk numarası olabilir. Mesaj: Rutin raporların ve serbest konuşmaların kodlandığı bölümdür. Dizin Kontrol: Bu kısımdaki kodlar sistemin doğru çalışıp çalışmadığını kontrol edip doğru çalışıyor ise ACK (acknowledge); hatalı çalışıyor ise NAK (negative acknowledge) uyarısı verir. NOT: Mesajı oluşturan karakterler dijital olarak kodlanmakta fakat aktarımı analog olarak uçağın VHF haberleşme sistemi vasıtasıyla iki farklı tonda ses sinyali ile aktarılmaktadır. Karşı tarafta tekrar çözümlenerek dijital forma dönüştürülüp kullanılmaktadır. 47
48 Hava araçlarının, kaza anında kazayı algılayan ve acil durum sinyalleri gönderen acil durum yer tespit üniteleri bulundurmaları yasalar tarafından belirlenmiştir. Cihazın yılda bir kez bakımının yapılması düzenlemelerce belirlenmiştir. Bu bakımda yüklemelerin doğruluğu, batarya ve çarpışma sensörlerinin durumu kontrol edilir. NOT: Cihazın üzerindeki ok işareti cihazın hava aracının hareketi yönünde takılması gerektiğini belirten bir işarettir. Cihazın belirtilen yönde takılması doğru bir şekilde çalışması için önemlidir. Helikopterlerdeki kaza algılama sensörleri 6 farklı yönde cevap verirler. 48
49 Acil durum ses sinyali frekansı: MHz Sivil Havacılık* *2009 da terk edilmiştir MHz Askeri Birimler MHz Daha sonra geliştirilmiş ve diğer iki acil durum ses sinyallerinin verdiği bilgiyi de kapsayan dijital veri taşıyan acil durum sinyal frekansıdır. Acil durum belirten bu sinyaller Cospas-Sarsat uydu sistemi tarafından algılanır. Bu uydu sistemi aynı zamanda yer istasyonları, görev kontrol ve kurtarma koordinasyon merkezleri tarafından desteklenmektedir. 49
50 Yer tespiti Cospas-Sarsat uydu sistemini oluşturan Geosar (Geosynchronous Orbit Search and Rescue) ve Leosar (Low Earth Orbit Search and Rescue) uyduların kullanımı ile yapılmaktadır. Leosar Uyduları: Doppler Shift yöntemiyle kaza yerinin tespitini sağlarlar. Sinyal kaynağına yaklaşıldıkça ölçülen frekans sinyal frekansından daha yüksek olurken; sinyal kaynağından uzaklaşıldıkça ölçülen frekans daha düşük olacaktır. Böylece birkaç yönde yapılan geçişler sonrası kaza yeri tespit edilebilir. Bütün dünyayı kapsayan bir görüş alanına sahiptirler. Kaza yerini gördüğü anda yer istasyonunu görmesi gerekmez. Kaza yerini kaydedip yer istasyonunu gördüğünde iletebilirler. Cospas-Sarsat Uydu Sistemi Doppler Shift 50
51 Geosar Uyduları: Leosar uyduları tüm dünyayı kapsamalarına rağmen her noktada sürekli bir izleme oluşturamazlar. Bunu sağlayan dünyaya göre sabit Geosar uydularıdır. NOT: Kapsama alanı daha kısıtlıdır. Sabit oldukları için Doppler Shift kullanamazlar. Bundan dolayı ELT üzerindeki GPS ten veya uçak üzerindeki harici bir GPS ten bilgi almaları gerekmektedir. Yer tespitindeki hata payları İlk sistemler (121.5 ve 243 MHz) 25 km 406 MHz (Doppler Shift kullanarak) km 406 MHz (GPS kullanarak) 0.1 km ve 243 MHz ses sinyalleri ile yapılan yer tespitlerinde kesin bilgiye ulaşılmadan harekete geçilmezken; 406 MHz sistemindeki kayıt sistemi sayesinde kimlik bilgileri dijital mesaj olarak iletilmekte, böylece yanlış alarmların önüne geçilerek zaman kaybı en aza indirilmektedir. 51
52 52

53 Cayroların temel özellikleri: Dönme ekseni uzayda sabittir, hep aynı doğrultuyu işaret eder (sürtünmenin olmadığı varsayımı ile). Dışardan bir kuvvet uygulandığında bu kuvvete dönme eksenini koruyacak şekilde tepki verir ve yalpalayarak eski halini alır. NOT-1: Yer çekimi ve dünyanın dönme prensipleri de dikkate alınarak havacılık sektöründe yaygın olarak kullanılan aviyoniklerin temelini oluşturan cayrolar geliştirilmiştir. NOT-2: Cayrolar sürtünmesiz olmadıkları için saparlar ve hava yolculukları dünya yüzeyi boyunca (küresel) yapıldığı için düzeltmeler yapılması gerekir. Bundan dolayı rutin olarak uçak düzken elle veya otomatik olarak düzeltmeler yapılmalıdır. 53
: En eski cayro tipleridir Suni")
 veren göstergelerde kullanılır")
54 Açısal Momentum Cayrolar (Angular momentum gyros): En eski cayro tipleridir Suni ufuk gösteriminde ve yatma bilgisi (Turn and Bank Indicator) veren göstergelerde kullanılır 54 Suni Ufuk

55 Parçacık Titreşimli Cayrolar (Micro-mechanical vibrating mass gyros): Yüksek doğruluk payı ile çalışırlar. Seri üretim yapılabilmesi üretim maliyetlerini düşürmektedir. Boyutları daha küçüktür. Sadece havacılıkta değil diğer sektörlerde de kullanılır. (ÖR: otomobil denge sistemleri, antenleri konumlandırma sistemleri, elektronik cihazlar; video kameralar,cep telefonları) 55
56 Optik Cayrolar: i) Optik Cayroların Çalışma Prensibi: Optik cayroların temel çalışma prensibi kapalı bir yörünge üzerinde zıt yönlerde hareket eden lazer ışık dalgalarının girdi dönme hareketi sonucu algılama ünitesine farklı zamanlarda ulaşmasıdır (Sagnac Effect). Bu zaman farkından yararlanarak optik cayrolar açısal dönme oranını tespit ederler. Bu oran girdi dönme oranına bağlıdır. 56
57 ii) Optik Cayro Çeşitleri: Halka Lazer Cayrolar (Ring Laser Gyros) Yüksek doğruluk oranı ile ve birkaç yıl kalibrasyon gerektirmeden çalışabilir Eylemsizlik temelli seyrüsefer sistemlerinde (INS) yaygın olarak kullanılır. Aktif çalışmaya başlamak için belli bir kurulum süresi istemezler. Fiber Optik Cayrolar (Fibre Optical Gyros) Temel çalışma prensibi ışığın girişimidir. Durum ve baş açısı referans sistemlerinde (AHRS) yaygın olarak kullanılır. Titreşim ve ivmelenmeden etkilenmez Yüksek doğruluk oranlarında (Hata payı:0.01 derece /saat) çalışır. Küçük boyutlarda üretim mümkündür. 57


58 Sisteme çalışma doğrultusunda etki eden kuvvetten yararlanılarak ivme bilgisinin elde edildiği cihazlardır. Bu bilgiler diğer birimlere aktarılarak çeşitli bilgilere ulaşılabilir. Değişik çalışma prensipleri kullanan çeşitleri vardır: Kapasitans değişimi Yay - kütle sistemleri Yarı iletken teknolojisi 58
59 Önceden belirlenmiş kontrol noktaları vasıtasıyla oto pilotun uçuşu gerçekleştirmesini sağlar ve aynı zamanda uçağın durum bilgileri gibi bazı diğer bilgileri de sağlayarak seyrüsefere yardımcı olur. Her başlatıldığında otomatik olarak kendi kalibrasyonunu yapar ve sistemini düzenli kontrol ederek uyarı sinyalleri verir. Uçak dışından herhangi bir bilgi ve sistemle bağlantı gerektirmez. NOT: Günümüzde GPS ile birlikte çalışarak koordinat güncellemesi yapmaktadır. Böylece daha doğru seyrüsefer imkanı sunar. Kesin koordinatları belli noktalar yüklendiğinde daha iyi bir uçuş sağlayabilir. 59
60 INS de hatalara sebep olan girdiler sisteme kaynaklık eden seyrüsefer bilgileridir. Konum bilgisi: Elle girilir veya radyo seyrüsefer, GPS gibi birimlerden alınabilir. Bu elemanlardaki hata payları sistem hatasına eklenir. Pito-Statik sistem: Bu sistemden alınan hız bilgisindeki hata payları sistem hatasına katkıda bulunur. Cayrolar ve ivme ölçerler: Durum bilgisinin alındığı bu elemanlardaki hata payları da sistem hatasına eklenir. 60
61 Bilinen bir noktadan bilinen durum bilgisi ile başlayarak uçağın ivmelenme ve durum bilgileri aracılığıyla seyrüsefer yapmasını sağlayan sistemdir. Bu sistemde, uçağın doğru veriler elde etmesi için ivme ölçerlerin bulunduğu platformun her zaman yeryüzüne paralel olması gerekir. Bu da platformda bulunan cayrolar aracılığı ile platform motorlarına aktarılan veri ile sağlanır. Böylece uçağın sadece yatay ivmesi ölçülmüş olur. Ayrıca uçağın düşey ivmesini de ölçen başka bir ivme ölçer vardır. 61
62 Cayrolar ve İvme Ölçerler Sistem elemanlarının temel fonksiyonu doğrusal ivme ve açısal dönme oranlarını belirlemektir. Sistemde bulunan cayrolar yatma, sapma ve yunuslama bilgilerinin elde edilmesinde; ivme ölçerler ise doğrusal ivmelerin hesaplanmasında kullanılır. INS Bilgisayarı Sürekli değişen seyrüsefer verilerini ve düzeltme faktörlerini kullanarak yüksek doğruluk dereceli durum, baş açısı vb. bilgiler üreten INS sistemi elemanıdır. Hesaplanan veriler HSI da ve diğer başka ekranlarda görüntülenebilir. 62
63 Eylemsizlik temelli açısal değişim sensörleri kullanarak uçağın durum bilgisi, baş açısı gibi bilgileri kokpit göstergelerine, uçuş kontrol ünitelerine ve diğer aviyonik sistemlere sağlayan sistemdir. Teknolojinin gelişmesi ile geleneksel yönlü cayro platformların ve ivme ölçerlerin yerine yeni sensör sistemleri (strapped down sistemler) üretilmiştir. Geleneksel sistemlerden daha hızlıdır. Sensörlerden elde edilen veriler bilgisayarda işlenerek aviyonik sistemlerin kullanabileceği hale getirilir ve gerekli sistemlere aktarılır. 63
64 Akı Vanası (Flux Valve): Dünyanın manyetik alanından sapmayı ölçer. Genellikle manyetik etkileşimden etkilenmeyecek yerlere kanat veya kuyruk kısmına yerleştirilir. Kontrol Ünitesi (Controller): Akı vanası için düzeltme bilgisi sağlar. Kokpite konur. Durum ve Baş Açısı Referans Ünitesi (AHRU): Eylemsizlik Veri Ölçüm Ünitesi (IMU): Açısal değişim cayroları, ivme ölçerler ve yardımcı elektroniklerden oluşur. Uçağın dinamik bilgisini sağlar. İşlemci (CPU): Durum ve baş açısı ile ilgili bilgileri elde etmek için gerekli olan hesaplamaları yapar. Girdi/Çıktı Ünitesi (Input/Output): Dijital-analog ve analog-dijital dönüşümleri yapar. Güç Kaynağı Dönüştürücü (Power Supply Converter): Uçağın sağladığı enerjiyi sistemin kullanacağı hale dönüştürür. 64
65 Histeresiz Eğrisi ve Ferromanyetik Maddeler Histeresiz eğrisinin eğimi bir maddenin manyetik geçirgenliğini belirler. Manyetik geçirgenliği yüksek olan cisimler (demir) manyetik alan çizgilerini bozarken; geçirgenliği düşük olanlar (tahta) manyetik alan çizgilerini etkilemez. Ferromanyetik (manyetik geçirgenliği yüksek madde) maddelerin manyetik özelliklerini arttırdığında geçirgenlikleri düşmeye başlar ve alan çizgilerini etkilememeye başlarlar. 65
66 Merkezdeki sarımlara bağlı 400 Hz kaynak sayesinde akı vanasının etki ile manyetik özellikleri değiştirilir. Dönen akı vanasının manyetik özelliklerinin değişmesi, geçirgenliğinin sıfır ile yüksek değerler arasında gezinmesini sağlar. Böylece cisim manyetik akıyı bir üstünde toplayıp bir etkilemeyecek şekilde davranır. Dünyanın manyetik kuzeyi ile vana kollarının yaptığı açıya bağlı olarak kollardan geçen akı değişir. Değişen manyetik akı kollardaki sarımlarda elektrik akımı oluşturur. Bunların karşılaştırılmasıyla manyetik kuzeyden sapma bulunur. 66


67 Manyetik pusulalar dünyanın manyetik kuzeyini işaret eden aletlerdir. Bunun için manyetik alan çizgilerinin yatay bileşenlerini kullanırlar. Ekvatorda manyetik alan çizgileri yeryüzüne paralel olduğu için doğru yönü gösterirler. Kutuplara doğru gidildikçe alan çizgileri dikleşir ve kullanım amacının dışına çıkar. Dünyanın manyetik kuzeyi ile coğrafik kuzeyi arasında bir açı bulunur. Bölgesel olarak yön bilgisi düzeltmesi gerektirir. Bu zorluklar cayro-stabil pusula sistemleri (electrical remote reading, gyro-stabilized compass) ile aşılmıştır. 67

68 Seyrüsefer esnasında irtifa, hava hızı, sıcaklık ve tırmanma açısı gibi bilgilerin elde edilmesi amacı ile pito-statik sistem tarafından elde edilen hava basıncı ve termometreden alınan sıcaklık bilgilerinin birlikte işlendiği aviyonik sistemdir. Yerel hava basıncı ve ortam sıcaklığının algılanması amacı ile sıcaklık sensörleri ve hava basınç sensörleri kullanılmıştır. Sensörler dış ortama açık olduğu için donmaya ve su buharı gibi sensörler için risk oluşturan etmenlere karşı bazı önlemler geliştirilmiştir. Donmaya karşı sistemler ısıtılmaktadır. Isıtmalar yapılan ölçümlerde hatalara yol açmaktadır; fakat hesaplamalar dahilinde düzeltilirler. Su buharı ve su damlalarına karşı da sistemlere giren damlaların atılacağı borular bırakılmıştır. 68


69 Statik Port: Statik hava basıncının, sadece havanın ağırlığından dolayı oluşan basınç, ölçüldüğü sensördür. Hava basıncının uçağın hareketinden etkilenmediği yerlere yerleştirilerek doğru ölçümler yapılmaya çalışılır. Pito Portu: Statik hava basıncına uçağın hareketinden kaynaklanan basıncın eklenmesiyle oluşan toplam hava basıncını ölçmek için kullanılır. NOT: Bu portların buzlanmasını önlemek için portlar ısıtılır. Isıtmadan kaynaklı hatalar hava veri bilgisayarında işlenirken dikkate alınır. Ayrıca portlara giren su damlacıklarının atılması için su giderleri de oluşturulur. 69
70 Ortamdan iki çeşit hava sıcaklık bilgisi alınır: Durağan Hava Sıcaklığı: Hava aracını çevreleyen durağan havanın sıcaklığıdır. Toplam Hava Sıcaklığı: Uçağın hareketi sonucu hava moleküllerinin sürtünmeleri etkisiyle sensörlerde oluşan sıcaklık artışının da hesaba katıldığı sıcaklık bilgisidir. Termometre Çeşitleri Hava Akımından İzole Termometreler: Durağan hava sıcaklığını ölçen termometrelerdir. Hava Akımının İçindeki Termometreler: Toplam hava sıcaklığını ölçerler. 70

71 Pito-statik sistemden ve termometrelerden elde edilen verileri alıp işleyen ve diğer aviyonik ekipmanlar ile pilot için kullanışlı hale getiren hava aracı ekipmanıdır. Hesaplama kabiliyetleri ile hata paylarını en aza indirerek mekanik göstergelere kıyasla daha doğru ve kullanışlı bilgiler sunmaktadır. Mekanik göstergelerin iş yükünü ve kalibrasyon zorluklarını ortadan kaldırmıştır. Diğer ekipmanlar için veri oluşturarak kaynaklık eder. 71
72 Hesaplanan Veriler: İrtifa Barometrik İrtifa: Deniz seviyesi standart basıncı baz alınarak hesaplanır. Barometrik Düzeltilmiş İrtifa: O günkü hava basıncı baz alınarak hesaplanır. Hava Hızı Gösterilen Hava Hızı: Toplam hava basıncı ile statik hava basıncının farkından elde edilen ham bilgidir. Düzeltilmiş Hava Hızı: Pito ve statik portların geometrisinden ve yerleşiminden kaynaklanan hataların düzeltildiği hava hızıdır. Eş Hava Hızı: Havanın bazı özellikleri dikkate alınarak yapılan düzeltmeler sonrası elde edilen bilgidir. Teorik bir bilgidir. Yüksek irtifa uçaklarında direk kullanılabilmektedir. Doğru Hava Hızı: Sıcaklık etkisinin de eklenmesiyle elde edilen hız bilgisidir. Mach Sayısı: Uçağın doğru hava hızının bulunduğu ortamdaki ses hızına oranıdır. NOT: Ses hızı sıcaklık ve hava yoğunluğunun bir fonksiyonudur. 72
73 Hava veri bilgisayarı tarafından hesaplanan bilgiler hava aracındaki diğer aviyonik sistemlerle de paylaşılmaktadır. Hesaplanan Veri Barometrik İrtifa Paylaşılan Aviyonikler Transponder, TCAS, Altimetre, Oto-pilot, FADEC Barometrik Düzeltilmiş İrtifa Elektronik göstergeler, Altimetre, Oto-pilot, FADEC Doğru Hava Hızı Mach Sayısı Düşey Hız Hava hızı göstergesi, Oto-pilot, FADEC Mach Metre, Oto-pilot, FADEC Düşey hız göstergesi, Anlık düşey hız göstergesi, TCAS, Oto-pilot, FADEC 73
74 74
 Range (NM) T (Terminal) VOR L (Low Altitude) VOR 1000 12000 25 1000 18000 40 H (High Altitude) VOR 1000 14500 14500-60000")
75 Hava aracının referans verici kulesine göre açısal konumunu bildiren aviyonik sistemdir MHz frekans aralığında çalışır. Yayın alanı: VOR Tipi Altitude (Feet) Range (NM) T (Terminal) VOR L (Low Altitude) VOR H (High Altitude) VOR
76 VOR kuleleri iki sinyal yayarlar Referans sinyali (Frekans kiplemeli ve saniyede 30 kez yayılır) Değişken sinyal (Genlik kiplemeli ve saniyede 30 tur atar) Çalışma prensibi: Değişken sinyal manyetik kuzeyi her işaret ettiğinde referans sinyali her yönde yayılır. Yayın alanı içindeki her hava aracı bu referans sinyalini alır. Bu sinyalden belli bir süre sonra da değişken sinyali alır. İki sinyal arasındaki faz farkından hava aracının manyetik kuzeye göre kule ile kaç derece açı yaptığını belirtir. 76
77 VOR bilgisi durum göstergesi üstünde gösterilebilir. Bu göstergeden okunabilecek bilgiler şunlardır: VOR kulesine göre gidilecek yer (Course) Gidilecek yerden sapma (Deviation Indicator) VOR kulesine doğru (TO) veya VOR kulesinden öte (FRO) gittiğimize dair bilgi NOT: VOR kulesinin yeri (Bearing) de gösterilebilir VOR kuleleri seyrüsefer sinyallerinden başka kule tanımlaması için 2 sinyal daha gönderirler: Mors kodlamalı ses sinyali Normal ses iletimi 77

78 Kötü hava koşullarında hava araçlarının iniş yapmasını sağlayan aviyonik sistemdir. Güçlü ışıklandırılmış şehirlerde pistin bulunmasında pilotlara yardımcı olur. Uçakların piste doğru şekilde Yaklaşmalarını sağlayarak sağlıklı bir inişe yardımcı olur. 78

79 Karar İrtifası (Decision Height/DH): Pilotun inmek için gerekli olan tüm koşulların sağlanıp sağlanmadığına bakarak inişe devam veya kaçış kararı verdiği irtifadır. Pist Görüş Mesafesi (Runway Visual Range/RVR): Pist üzerinde görüş mesafesinin ne kadar olduğu bilgisidir. 79
80 ILS Kategori DH (Feet) RVR (Feet) Uçak Üzerinde Gerekli cihazlar CAT-I Localizer Alıcısı Glideslope Alıcısı Marker Beacon Alıcısı ADF *DME (* Bazı hava alanlarında istenmektedir) CAT-II CAT-I için gerekli cihazlar İkinci Localizer Alıcı İkinci Glideslope Alıcı Radar Altimetre CAT-IIIa CAT-II için gerekli cihazlar Otomatik pilot CAT-IIIb CAT-IIIa için gerekli cihazlar Otomatik iniş sistemi CAT-IIIc 0 0 Tamamen kör iniş Otomatik pilot uçağı indirse bile pilot uçağı taksi yoluna çıkaramaz 80

81 Konumlandırıcı (Localizer): Konumlandırma vericisi pistin orta çizgisi boyunca radyo sinyalleri yayarak uçağın pisti ortalamasını sağlayacak olan sağ ve sol komutlarını pilota verir. Bu radyo sinyalleri istasyonu tanımlayıcı kodlar da içermektedir. VHF bandında, konumlandırıcılar için ayrılmış MHz frekans aralığında tek ondalık kısımlardan oluşan 40 kanal bulunur. ÖR.:108.1MHz; MHz; MHz; Konumlandırıcı frekans aralığı VOR frekans aralığına düşmektedir. Konumlandırıcı frekanslarının tek ondalık kısımlardan oluşması bu sinyallerin VOR alıcılarında işlenip kendi dedektörlerine aktarılmasını sağlar. Konumlandırıcı frekansı girildiğinde alıcı otomatik olarak konumlandırıcı işlemlerine yönelmiş olur. 81
82 İniş Açısı (Glideslope): İnişlerde pilotlara iniş açısıyla ilgili rehberlik etmek amacıyla tipik 3 derece açıyla radyo sinyalleri yayarak pilotun iniş patikasını yakalamasını sağlar. Konumlandırıcı kanallarıyla eşlenmiş 40 adet kanal bulunur ve bu kanallar konumlandırıcı kanalı ayarlandığında otomatik olarak ayarlanır. Bu kanallar MHz frekans aralığında UHF bandında sıralanır. ILS alıcısı uçağın pistin orta çizgisi boyunca piste yaklaşmasını ve doğru iniş açısını yakalamasını sağlarken gelen radyo dalgalarının genlik şiddetini karşılaştırarak bilgi verir. (Difference in depth of Modulation-DDM) 82

83 İşaret Sinyali (Marker Beacon): Pilota hava alanına uzaklığı hakkında bilgi veren sesli ve görsel işaretler sunan iniş sistemi elemanıdır. Uçuş için kritik noktalarda konumlandırılmışlardır. Uçuşun önemli evrelerini işaretlerler. Pilota iniş açısını yakalama noktası, karar irtifası ve son kaçış noktası gibi bilgileri sunarlar. İşaret sinyallerinin bir diğer önemli özelliği de pilota dış işaretleyicide doğru iniş açısı hakkında bilgi vermesidir. Dış işaretleyicide irtifa kontrolü yaparak pilot doğru açıda olup olmadığını anlayabilir. 83
84 ILS e alternatif daha güvenilir bir sistem olarak sunulmuştur; fakat GPS konumlandırma sistemlerinin gelişimi kullanımını kısıtlamıştır. MLS in ILS üzerindeki avantajları: Daha fazla kanala sahip olması ile yoğun trafiği destekleyebilir. MLS 200 kanal / ILS 40 kanal Frekans Bandı: MHz ILS tek iniş yolu desteklerken MLS bir pistte birden çok yönden inişi destekler ILS güçlü FM istasyonlarından etkilenirken MLS de böyle bir sorun yoktur. ILS yeryüzü şekillerinden çok etkilenirken MLS daha az etkilenir. 84
85 Mikrodalga antenler daha küçük ve uygulanabilirliği daha yüksektir. MLS sistemlerin çeşitli koşullarda kurulumu ve inişe hazır hale getirilmesi kolay ve hızlıdır; değişken hava koşullarında süreklilik sağlarlar. MLS, ILS ten farklı olarak 3 boyutlu konumlandırma bilgisi sunar Azimuth Elevation P-DME (Precision DME) Yatay konum Düşey konum Pistten uzaklık Bu bilgilerle MLS basamaklı inişi ve kavisli inişleri desteklemektedir. 85
86 Yatay Tarayıcı (Azimuth): Düşey Tarayıcı (Elevation): Azimuth ile aynı prensipte çalışır. Hava aracının düşeydeki konumunu belirler. Ancak, yataydakinden 3 kat daha kesin bilgi verir. Azimuth 13.5 tarama/saniye Elevation 40.5 tarama/saniye ILS teki iniş açısı (Glideslope) ile eşdeğerdir; fakat daha geniş bir açıda çalışır. Yatayda konum bilgisi veren bileşendir. Yatayda sağa ve sola dönüşler ( TO ve FRO ) esnasında bir sinyal yayılır. Alıcı iki yönde geçerken de sinyali alır ve aradaki süre farkından hava aracının pistin merkez çizgisine göre konumunu belirler. ILS teki konumlandırıcıyla (Localizer) aynı işi fakat daha geniş bir alanda yapar. 86
87 khz frekans aralığında, düşük ve orta frekans bantlarında çalışır. AM kullanılır. Yer istasyonu: NDB (Non-Directional radiobeacon) Alıcı: İki tane alıcı anten kullanılır; Spiral (Loop) ve Algı (Sense) antenleri. Spiral Anten ADF kulesinin bulunduğu çizgiyi tespit eder Algı Anteni ADF kulesinin bu çizginin hangi ucunda olduğunu belirler 87

88 NOT: Ekranın «smart» veya «dump» olmasına bağlı olarak sembol üretici ve ekran tek birim veya iki ayrı birim olabilir. Quadrantal Error Corrector: Uçağın metal kısımlarından dolayı sinyalde oluşan bozulmaları düzeltmek için kullanılır. Goniometer: Spiral antenden alınan sinyalleri karşılaştırarak sinyalin doğrultusu hakkında bilgi verir. 88
89 NDB istasyonları güçlerine göre sınıflandırılır: Kullanım Alanı Güç (Watt) Menzil (mile) Şehirlerarası Kıyı şeridinde 1000 ve üstü NDB istasyonları, taşıyıcı sinyalleri ses sinyalleri ile işleyerek kendilerini tanımlayan Mors kodları (2 ya da 3 harf) yayımlarlar. NOT: ADF kontrol panelinde «tone» ya da «BFO» (Beat Frequency Oscillator) seçeneği bulunur. Bu seçenek kodlanmış taşıyıcı sinyali ses sinyaline dönüştürür. ADF in dezavantajları: Düşük frekansta çalıştığı için elektriksel etkileşim yüksektir. Geceleri iyon kürede uzun yollar kateden ADF sinyalleri yanıltıcı olabilirler. ADF sinyalleri çoğunlukla yer sinyalleri olarak taşındıkları için kıyı kesiminde kırılmalara uğrayıp yanlış bilgi verebilirler. Uçağın metal kısımlarındaki dağılım spiral antenin düzgün sinyal almasına engel olmaktadır. 89
90 Bir DME istasyonuna olan uzaklığı belirtir. Uzaklığın ne kadar hızlı değiştiği bilgisinden yer hızı (Ground Speed) ve istasyona varmak için gerekli süre (Time to Station) hesaplanabilir. Bu bilgi sadece istasyona doğru uçarken veya istasyondan uzaklaşırken doğru sonuçlar verir. DME frekansları VOR frekansları ile eşleştirilmiştir. VOR frekansı girildiğinde DME frekansı ( MHz / UHF Bandı) otomatik ayarlanır. Her DME istasyonunun kendine özgü 3 harfli Mors kodu bulunur.yer istasyonu bu kodu 30 saniyede bir yayımlar. Bu kodlar otomatik olarak algılanır ve tanınır. 2 ve üzeri DME istasyonundan alınan veri ile yer tespiti yapmak mümkündür. 90
91 Hava aracı kendine özgü bir sinyali («jitter») yer DME istasyonuna gönderir. Yer istasyonu standart 50 mikrosaniye bekletmeden sonra bu sinyali cevaplar. Hava aracı tarafından alınan bu cevap ile birlikte, gönderilen sinyal ile alınan sinyal arasında geçen süreden mesafe hesaplanır. Jitter: Her uçağın kendine özgü rasgele aralıklarla ürettiği sorgulama sinyalidir. Yer istasyonu bu sinyale aynı aralıklı sinyalle cevap verir. Bu hava aracının kendi sinyalini algılayıp doğru bilgiler elde etmesini sağlar. NOT: Gönderilen ve alınan sinyal arasında karışıklığı önlemek amacıyla 63 MHz frekans farkı bulunur. Ayrıca sinyaller karışıklığı önlemek amacıyla pulse çiftleri halinde gönderilirler. 91
92 Eğik Ölçüm (Slant Range): Hava aracı gönderilen ve alınan sinyal arasında geçen süreye göre mesafe ölçtüğü ve sinyalin düz bir yol izlediği kabul edilerek ölçüm yapıldığı için yatay uzaklık ölçümü değil eğik ölçüm yapılır. Eğimden kaynaklı bir ölçüm hatası söz konusudur. Söz konusu hata uzun mesafelerde ihmal edilebilir. Bir DME yer istasyonuna aşırı yüklenme (100 sorgulama) olduğu zaman yer istasyonu kendini korumaya almak için hassasiyetini düşürüp menzilinin ucundaki araçları görmezden gelmeye başlar. 92
93 Pilota yer istasyonuna göre konum ve uzaklık bilgilerini sunmak üzere tasarlanmış askeri seyrüsefer sistemidir. Sivil havacılıktaki VOR ve DME sistemlerinin birleştirilmiş halidir. İki bölümden oluşur: Yer İstasyonu Bölümü Hava Aracı Bölümü Pilota yer istasyonuna göre konum ve uzaklık bilgisi sunar. Sorgulama ve cevaplamalar MHz aralığında yapılır deniz mili menzile sahiptir. 93
94 Gönderilen sorgulama sinyali ve buna cevap olarak geri gönderilen sinyalin hava aracına ulaşması arasında geçen süre ve gecikme (50 µs) göz önüne alınır, sinyalin hızı (ışık hızı) da kullanılarak mesafe hesaplanır. Sivil hava araçları da TACAN istasyonlarının mesafe ölçüm (DME) özelliğini kullanırlar. 94
95 Yer kulesi çok yönlü anten aracılığıyla her yönde bir sinyal yayar. Bir yansıtıcı yardımıyla bu sinyal bir lob üzerinde (cardioid) yoğunlaştırılır ve bu lob 15 Hz frekansta saat yönünde döner. 8 kutuplu (8+1=9 kutup) sinyal kullanılarak daha kesin konum bilgisi elde edilir. Işık lobu doğuyu işaret ettiğinde her yönde bir ışık sinyali (Main Reference Burst-MRB) yayılır. TACAN alıcısı alınan bu iki sinyali karşılaştırarak konum bilgisine ulaşır. 95

96 Transponder yer istasyonu tarafından yapılan sorgulamalara otomatik cevap veren hava trafik kontrol birimi üyesidir. Uçak yerdeyken radarda oluşan görüntü kalabalığını önlemek için transponder standby modunda, hazır fakat cevap vermez vaziyette, tutulur. Her transponder kendine has hava trafik kontrol tarafından atanan 4 haneli bir koda sahiptir (Toplam 4096 kod). Şimdi daha yaygın olarak 24 bit adresli Mode-S Transponder kullanılır. Transponder sinyalleri uçağın kimliğini, irtifasını ve çeşitli bilgileri içerebilir. Transponder 1030 MHz sinyaller alıp;1090 MHz sinyaller ile cevap verir. NOT: DME frekansı ile transponder frekansı birbirine yakın olduğu için DME çalışırken transponder sinyali; transponder çalışırken DME sinyali baskılanır. 96
97 Birincil Gözetim Radarı (Primary Surveillance Radar) sadece sinyal gönderip uçağın yüzeyinden yansıyan sinyale bakarak herhangi bir şey olup olmadığı bilgisine ulaşır. Dönen sinyal çok zayıftır ve başka bilgi taşımaz. Asıl sorgulama İkincil Gözetim Radarı (Secondary Surveillance Radar/SSR) tarafından yapılır. Bu radar tarafından yayılan sinyaller uçağa ulaştığında transponder tarafından güçlendirilip geri yollanır. Bu sinyaller uçağın radar ekranında görülmesinin yanında uçağın kimlik bilgisi, transponder kodu ve yer hızı gibi bilgiler de taşır. 97
98 0.8 mikrosaniye P1 P2 P3 P1 ve P3 arasındaki 8 mikrosaniyelik boşluk transponder a bunun bir Mode-A sorgulaması olduğunu belirtir ve transponder kimlik bilgisini gönderir. P2 radar sinyalinin yanlarında oluşan yan kulakçıkların (sidelobe) etkisini kaldırmak için kullanılır. Transponder P1 ve P2 yi karşılaştırır; P1 P2 den büyükse cevap verir aksi halde cevap vermez. 98
99 Transponder kimlik kodlamasını bir iskelet üstüne yayılmış çeşitli noktalarda oluşturulan «pulse» ile yapmaktadır. Kodlar 0-7 arasındaki rakamlardan oluşan 4 basamaklı kodlardır ve toplam 4096 kod oluşturulabilir. NOT: Mode-S transponder kullanımı ile bu kısıtlama ortadan kalkacak ve 24-bitlik adresler kullanılacaktır. NOT: *Yukarıda kodlanmış Transponder kodu:1642 *En sonda görülen Ident Pulse yer istasyonun talebi üzerine IDENT tuşuna basılarak gönderilir ve hava aracının ekranda parlak olarak görünmesini sağlar. Sadece yer istasyonu istediğinde IDENT tuşuna basılmalıdır. 99
100 21 mikrosaniye P1 P2 P3 P1 ve P3 arasındaki 21 mikrosaniyelik boşluk, bunun bir Mode-C sorgulaması olduğunu belirtir ve transponder tarafından irtifa bilgisi gönderilir feet ile feet arasında yüzer feetlik adımlarla irtifa bilgisi verir. NOT: İrtifa bilgisi ölçülen hava basıncı bilgisiyle deniz seviyesindeki hava basıncı (29.92 inç-civa) baz alınarak hesaplanır. Deniz seviyesindeki hava basıncı değişken olduğundan pilot doğru ölçüm yapmak için deniz seviyesindeki basıncı elle girebilir. Fakat transponder dan gönderilen veri karışıklıkları önlemek için daima standart deniz seviyesindeki basınç baz alınarak hesaplanır. ATC tarafından gerçek değer girilerek doğru irtifa bilgisine ulaşılır. 100
101 ATCRBS (Air Traffic Control Radiobeacon System): Mode-A ve Mode-C sorgulamalarını destekler. Yapılan her sorgulamaya cevap verdiği için gereksiz kirliliğe neden olmaktadır. Birebir sorgulamaları desteklemez. Bir sorgulamaya birden çok cevap vererek kısıtlı bandı işgal etmektedir. Aynı hat üstündeki iki araçtan alınan sinyaller ayırt edilemez ve karışıklıklara yol açar. (Synchronous Garble) Trafik kontrol ve çarpışma önleyici sistemi (TCAS) desteklemez. 101
102 Mode-S Transponder Her Mode-S transponder havacılık otoriteleri tarafından belirlenen kendine özgü 24-bitlik adrese sahiptir. (Toplam 16,777,214 adres) Bu adresler kullanılarak Seçici Adresleme (Selective Addressing) ile birebir sorgulama yapılabilmektedir. Gereksiz sorgulamaların önüne geçilerek sinyal kirliliğinin önüne geçilmiş olur. Çarpışma önleyici sistem ile uyumlu çalışabilmektedir. Mode-S Sorgulama Çeşitleri Mode-S ATCRBS All Call: Kapsama alanındaki bütün transponder ekipmanları tarafından cevaplanır. Mode-S Discrete All Call: Sadece Mode-S transponder ekipmanları cevap verir. Mode-S Selective Address: Sadece adresi girilen transponder cevap verir. 102
103 Hava kuvvetleri alarm ve uyarı sistemidir. Ülke geneline yayılmış radar sistemlerine sahip Hava Kontrol Üniteleri (Aerial Control Units-ACU) hava araçlarının tanımlanmasını sağlar. Bu radar sistemleri çeşitli bilgiler sağlar: Hedef kimliği Alınan kimlik bilgisi IFF sistemi tarafından dost-düşman olarak tanımlanır. Hedef konumu Hedef irtifası Hedef uzaklığı Hedef hızı Hava araçlarındaki en önemli sistemlerden biridir. Hava aracında bu sistemin bulunmaması halinde hava aracı düşman ilan edilir. 103
104 Radar ve IFF sistemi eş zamanlı olarak birlikte çalışırlar. Radar gönderdiği sinyalin yansımasına bakarak hava aracı olup olmadığını; eğer varsa bu hava aracına ait bilgileri sisteme sağlar. Radarın görüş açısı dar bir alana yoğunlaştırılarak nesnenin hangi bölgede olduğu anlaşılır. Bazı veriler hesaplanır: Konum (Heading): Radar konumundan hesaplanır. Zaman Aralığı (Time İnterval): Sinyalin gönderim ve alım zamanından hesaplanır. İrtifa (Altitude): Sinyalin gönderim açısından hesaplanır. Hız (Velocity): Hedefin konum değişiminden hesaplanır. 104
105 IFF sorgulaması iki vuruştan (pulse) oluşur. Vuruş uzunluğu sabit 8µs iken iki pulse arasındaki süre «T» sorgulamanın türünü belirler. Sorgulama sinyali 1030 MHz sinyal üstüne kodlanır. NOT: TACAN ile olan frekans çakışması, Tranponder-DME gibi, biri çalışırken diğerinin sinyali baskılanarak sorun olmaktan çıkar. Kodlanan sinyal anten aracılığı ile hava aracına ulaştırılır. 105
106 Sorgulama sinyalindeki iki vuruş arasındaki zaman farkı sorgulama türünü belirler. Tür T (Süre) Amaç Kullanım 1 3 µs Güvenlik Kodu (Security Code) 2 5 µs Filo ve Hava Aracı Numarası (Squadron & A/C Number) 3/A 8 µs Sivil/Askeri ATC (Mission Role) Askeri Askeri Sivil ve Askeri C 21 µs İrtifa Askeri *4 - Askeri Tanımlama (Secure Military IFF) Askeri * Askeri Tanımlama modu (Secure Military Mode) daha karmaşık bir sorgulama sinyal yapısı kullanır. 106
107 Sorgulamayı cevaplayacak ünite sorgulama sinyalini algıladığında sorgulama türünü belirler ve buna uygun cevabı oluşturarak cevaplar. Cevap sinyali 1090 MHz sinyal üstüne kodlanır. Sorgu sinyali ve cevap sinyali arasındaki frekans farkı etkileşimi önleme amaçlıdır. Cevap sinyali 0.45 µs uzunluğundaki 15 vuruştan (pulse) oluşur. İki vuruş arasındaki uzaklık 1.45 µs dir. NOT: X vuruşu (pulse) pilotun uçaktan fırlatıldığını gösterir. 107

108 Radar altimetre -20 feet ile 2500 feet yerden yükseklik mesafelerinde kullanılır. Barometrik altimetreler sadece deniz seviyesinden yüksekliği ölçer ve doğru sonuç için sürekli deniz seviyesindeki değişken basınç değerleri girilmelidir. Radar altimetre ise deniz seviyesinden değil yerden yüksekliği ölçer. Hata Payları: Barometrik Altimetre feet Radar Altimetre 2 feet NOT: Çok düşük görüş mesafesinde 6 feet üstündeki hata payları uçağın sert bir iniş yapmasına veya daha kötüsüne yol açabilir. 108
109 Alçak karar irtifasi ve görüş mesafesi olan Cat-II ve Cat-III inişlerinde gereklidir. Radar altimetre veya diğer bazı sistemler önceden seçilmiş belli irtifalarda sesli uyarı verebilir. Uçak iniş için alçalmış ve iniş takımları açılmamış ise radar altimetre uyarı verir. Radar altimetrenin çeşitli aviyonik ekipmanlarla da bağlantısı vardır. Yere yakınlık uyarı sistemi (Ground Proximity Warning System) Uçuş bilgisi kaydedici 109
110 Radar altimetrenin temel bileşenleri: Alıcı Verici NOT: Alıcı ve verici antenleri ayrıdır. Böylelikle gönderilen ve yansıyan sinyallerin girişimi önlenmiş olur. Radar altimetre durgun frekansı 4300 MHz olan radyo taşıyıcı sinyalleri üretir. Her bir saniyede, üretilen dalganın frekansı 50 Hz arttırılır (Frekans Kiplemeli Sürekli Dalga (FMCW) Prensibi). Üretilen sinyal yere ulaşıp geri geldiğinde yansıyıp gelen sinyal ile o an üretilen sinyalin frekansı karşılaştırılarak geçen süre hesaplanır. Buradan da yerden yükseklik hesaplanır. 110
111 Yer istasyonları temelli seyrüsefer sistemlerinin gelecekte yerini alacak olan seyrüsefer sistemleridir. Uydu seyrüsefer sistemleri yer istasyonları temelli seyrüsefer sistemlerinin üstünde: Bilinçli hata karıştırılmadığı zaman daha doğru ve güvenilir bilgi sunarlar Daha geniş kapsama alanına sahiptirler Basit radyo dalgalarının ötesinde yoğun bilgi paketlerini kodlayarak uydular aracılığı ile aktarabilirler. Sistemde 24 adet uydu bulunur. 21 i aktif diğer 3 ü yedektir. Bir turu 12 saatte tamamlarlar. Her GPS uydusu en az 2 tane atomik saat içerir. Zaman konum belirlemede kesinlik açısından çok kritiktir. 111
112 GPS Frekansları: L5 L2 L MHz MHz MHz Sivil Havacılık Askeri/Sivil* Askeri / Sivil Havacılık *Sivil fakat havacılık amaçlı değil GPS Sistem Bileşenleri: Uydular (Space Segment) Bir turu 12 saatte tamamlarlar. Dünya üzerinde herhangi bir noktada 10 taneye kadar uyduyla bağlantıya geçmek mümkündür. Kontrol Merkezi (Control Segment) Uyduların performansı ve durumları bu merkez tarafından izlenmektedir. Ayrıca kullanıcılara aktarılacak olan yörünge ve saat doğrulama faktörleri günde birkaç kez bu merkez tarafından güncellenmektedir. Kullanıcı Bileşeni (User Segment) Hava araçları, gemiler, diğer araçlar harici kullanıcılar bu bileşeni oluşturmaktadır. 112
113 Konum belirlemede uydudan gönderilen sinyalin çıkış saati ile alıcı tarafına ulaştığı saat arasındaki süre farkı kullanılarak uyduya olan uzaklık belirlenir. Birkaç uyduya olan uzaklığın belirlenmesinden sonra yer tespiti yapılır. Süre Farkı Uydudan yayılan kod GPS alıcısında kaydedilen kod Her uydu önceden alıcı tarafından da bilinen kendine has kimlik kodunu (pseudorandom code) gönderdiği koda ekler. Alıcı, kodu aldığında kodun geliş saati ve kodlanmış olarak gelen gönderilme saatine bakarak uyduya olan uzaklığını belirler. 113

114 Birinci Uydu: Birinci uydudan alınan sinyalle alıcının hayali bir kürenin yüzeyinde bir yerde olduğu anlaşılır. İkinci Uydu: İkinci uydudan alınan sinyalle birlikte alıcının bulunabileceği yer bir çemberin üzerine indirgenir. Üçüncü Uydu: Üçüncü uydudan alınan sinyalle birlikte alıcının bulunabileceği iki nokta belirlenir. NOT: Alıcı aynı anda iki yerde bulunamayacağından alıcı noktanın birini eler ve tek nokta kalır. Ancak; dört uydudan alınan sinyalle alıcının kesin yeri, iki noktadan dördüncü hayali küreye yakın olanı, belirlenir. 114

115 Uydu sinyali çeşitli evrelerden oluşmaktadır. Bu evrelerde yalnızca bu uyduya ait bilgiler değil aynı zamanda diğer uydulara ait bilgiler de bulunmaktadır. 115
116 Aletli iniş sistemine alternatif olması amacıyla geliştirilmiş bir sistemdir. Çalışma Prensibi: 1) Yerde kurulu konumları kesin olarak bilinen bir yer istasyonları ağı mevcuttur. Uçağın veri aldığı uydudan yerdeki bu istasyonlarda veri alır. 2) Bu veriden elde edilen konum bilgisi gerçek konum ile karşılaştırılarak hata payı hesaplanır. 3) Bu hata payı bilgileri yer merkez istasyonuna iletilir. 4) Merkez de bu bilgiyi GPS sinyalleri olarak haberleşme uyduları aracılığı ile uçaklara ulaştırır. Böylece hata payı düşürülmüş olur. 116
117 Yer İstasyonu Temelli Yerel GPS Sistemi (LAAS): WAAS ile aynı prensipte çalışır. Farkı yer istasyonunun pistin yanında olması ve hata payını VHF istasyonu vasıtasıyla uçağa iletmesidir. İstasyonun pistin yanında olması hata payını iyice azaltarak Cat-I koşullarının üzerinde bir kesinlik sağlar. (Differential GPS) RAIM (Receiver Autonomous Integrity System): GPS alıcısını destekleyen bir sistemdir. İniş için toplanacak bilginin alınabileceği yeterli sayıda ve uygun geometride uydu olup olmadığını kontrol eder. En iyi veriyi almak için uydu seçimlerini yapar ve inişten önce GPS sisteminin iniş koşullarını karşılayacak bilgiyi sağlayıp sağlayamayacağı bilgisini verir. 117

118 118
119 Eski mekanik ve elektro-mekanik göstergelerin yerini elektronik ekranlarının almasıyla birlikte «Cam Kokpit» olarak da adlandırılmaktadır. Avantajları: Yüzlerce göstergeyi bir ekranda toplamayı mümkün kılmıştır. Herhangi bir gösterge birden fazla ekrana kolaylıkla aktarılabilir. Birbiriyle bağlantılı verileri tek karede uygun bir şekilde gösterebilir Oluşan arızalar hakkında uyarı mesajları verebilir 119

120 Bu dört göstergenin yerleşimi standardize edilerek pilotların uçuş için gerekli temel bilgilerde uçaklar arası uyum sorunu çekmelerinin önüne geçilmiştir. 120
121 Genel kullanım amacı hava aracının durumunu kontrol etmek ve seyrüsefer yapmaktır. Temel uçuş ekranında gösterilebilecek öğeler: Durum bilgisi Baş doğrultusu İrtifa bilgisi Hava hızı Düşey hız Seçilmiş hedef Otomatik pilot/uçuş yöneticisi 121
122 Çeşitli aviyonik sistemlerden gelen verilerin görüntülendiği ekrandır. Görüntülerin hazır olarak gelmesi (Dump MFD) veya görüntünün ekranda verilerin işlenip oluşturulmasına (Smart MFD) bağlı olarak iki sınıfa ayrılırlar. Dump MFD: Veriler merkezi bilgisayarda işlenip ekrana sadece grafikler aktarılır. Smart MFD: Ekipmanlardan alınan bilgileri işler ve görüntüyü oluşturup ekrana yansıtır. Veri işleyebildiği için çeşitli hesaplamalar ile gerekli başka veriler oluşturabilir. 122
123 Ekran parlaklığı, aydınlatması otomatik olarak ayarlanabilir. Ekran aydınlatması aynı zamanda gece görüşü uyumlu da olabilir. Ekran dokunmatik özelliğe sahip olabilir. Ekranın içine yerleştirildiği çerçeve üzerinde kontrol tuşları bulunur. Bu tuşlara çeşitli görevler atanabilir. Ayrıca çerçevenin aydınlatması ekrandan bağımsız olarak yapılır. Dump MFD seri arayüzler ile merkezi bilgisayara bağlanarak kontrol düğmelerine çeşitli yetenekler kazandırılabilir. MFD de gösterilebilecek öğeler: PFD Radyo yönetimi Hava aracı sistemleri Motor ekipmanları Kontrol listesi Hareketli harita Uçuş planı Tablolar Pist diyagramları Uyarılar Trafik bilgisi Rüzgar yönü ve hızı 123
 RMS (Radio Management Systems) CMS (Cabin Management Systems) CMU")

124 Veri yolları aracılığı ile uyumlu sistemlerin kontrolünü ve bu sistemlerden veri ve durum bilgisi alıp görüntüleyebilen sistemdir. Kontrolü sağlanabilen sistemler: FMS (Flight Management Systems) RMS (Radio Management Systems) CMS (Cabin Management Systems) CMU (Communication Management Unit /ACARS) Satellite Communication System Bir klavye ve çok fonksiyonlu ekrandan oluşur. Ekran gece görüşü uyumlu olabilir. İşlemcisi sayesinde mesaj ve grafik oluşturma yeteneklerine sahiptir. Ekipman özel yazılım koşturmayı destekler. 124
125 Kullanıcı girişi ve ekran kullanılabilirliğinin ayarlanması amacıyla kontrol tuşları bulundurur. Klavye ile sayısal ve yazınsal veri girişini sağlar. Gösterilecek verinin kaynağını seçmek için hat seçim tuşları bulunur. Özel yetenekler atanmış bazı tuşlar bulunabilir. Klavye ve ekran aydınlatması ayrı olarak yapılır. 125
 sayısal veri")

126 UFCP pilota bazı kontrol ve veri giriş yetenekleri sunan cihazdır. Bu yeteneklerden bazıları: Çalışma modunu seçebilme Seri bağlantılardan gelen veriyi gösterebilme Görev bilgisayarına (Mission Computer-MC) sayısal veri girişi yapabilme Sistem durum ve performans testlerini başlatabilme Haberleşme, seyrüsefer gibi veri almaç/göndermeç ayarlarını yapabilme Görev bilgisayarına veri girişi önemli görevlerindendir. Görev bilgisayarı ile bağlantısı seri bir bağlantı arayüzü ile sağlanır. Ön ve arka kokpitte bulunmasına göre R-UFCP veya F-UFCP olarak adlandırılır. Ön kokpitteki genellikle HUD (Head up Display) üzerinden çalışır. 126

127 Değişik çalışma modları bulunur: Normal Mod: Görev bilgisayarı ve HUD ile ilgili veri alışverişi ve kontrol özellikleri kullanılabilir. Test Modu: SHUD tan gelen komutla bu moda girebilir. Normal moddan farklı olarak, gösterilen son verinin kaydı tutulur ve tekrar görüntülenebilir. Off Mod: UFCP nin güç bağlantısı kesilir. Sistemlerle bağlantıyı sağlayan tuş takımları bulunur. Hat seçim tuşları Sayısal tuşlar Fonksiyonel tuşlar 127
128 Uçuş esnasında yapılan kayıtlar kazaların sebeplerinin tespitinde çok büyük önem taşır. Yapılan kayıtlar aynı zamanda ortaya çıkabilecek olan problemlerin de ön habercileridirler. Böylelikle hem önlem alınabilmekte hem de bakım onarım masrafları düşürülmektedir. İlk zamanlarda kayıtlar banda kaydedilirken teknolojinin gelişmesi ile birlikte dijital belleklere kaydedilmeye başlanmıştır. 128
129 Temel Özellikleri: 30 dakika süreyle kayıt yapmaları yasalarca belirlenmiş bir gerekçedir. Otuzuncu dakikadan sonra ilk dakikadan başlayarak eski bilgiyi silip yenisini kaydetmeye devam eder. 30 dk Amerikan yasalarınca belirlenmiştir. Bazı ülkelerde bu gereklilik 120 dakikadır. Sistem yerde veri silinmesini de desteklemektedir; ancak uçuş esnasında veri silinemez. Bu weight-on-wheels özelliği ile garanti altına alınmıştır. Dijital belleklerle birlikte, ses kaydediciler birkaç parçası dışında çok sık bakım gerektirmez. 129
130 Eylemsizlik Anahtarı (İnertial Switch): Uçağın kazadan sonra ses kaydına devam edip kaza öncesi kayıtları silmesini önlemek amacıyla kaza anındaki yüksek G-kuvvetini algılayan ve kaydedicinin güç kaynağı ile bağlantısını kesen sistemdir. Ses Kanalları: Kokpit ses kaydedici 4 adet ses kanalını desteklemektedir. Kaptan Pilot (Captain): Kaptan pilot tarafından kullanılan bütün mikrofonların ses kaydediciye aktarıldığı kanaldır. Haberleşme görüşmelerinin kayıt altına alınmasını sağlar. Yardımcı Pilot (Co-pilot): Kaptan pilot sisteminin aynısıdır. Kokpit Mikrofonu (Cockpit Area Mike): Kokpitteki seslerin kaydedilmesini sağlar. Yolcu Kanalı (Public Address/PA): Mürettebat tarafından yolculara yapılan duyuruları ses kaydediciye aktarır. 130
131 Temel Özellikleri: Büyük hava araçlarında dijital uçuş bilgisi kaydedicilerinin bulundurulması bir gerekliliktir. Uçakların büyüklüğüne göre bu uçaklarda kaydedilen parametre sayısı da değişmektedir den önce üretilen uçaklarda parametre kaydedilirken, sonrakilerde 88 parametrenin kaydının yapılması kararlaştırılmıştır. Kaydediciler gelen analog sinyalleri dijital sinyallere çevirerek dijital belleklere (solid-state memory) kaydederler. Dijital bellekler kullanıldığı için bakım sıkıntısı yoktur. Ortalama 25 saatlik uçuş bilgisi kaydederler ve kazadan sonra saat bu bilgiyi saklayabilirler. 131
132 Su altında ses ve uçuş bilgisi kaydedicilerin yer tespitini sağlayacak olan, kaydedicilere takılan cihazdır. Her kaydedicide bir tane bulunur; ancak iki kaydedici bir arada ise ve kaza sırasında ayrılması mümkün değilse bir tane de yeterli olur. Cihaz ıslandıktan sonra aktive olur ve 37.5 khz frekanslı ultrasonik bir ton yayar. Cihazın su altına girdikten sonra 4 saat içinde bu tonu yaymaya başlaması ve bunu en az 30 gün boyunca sürdürebilmesi gerekmektedir feet derinliğe kadar işlevini yerine getirebilmelidir. 132

133 Hava araçları açısından tehlike oluşturan hava unsurları: Türbülans: Genellikle fırtına bulutlarının arasında oluşur. İki hava akımının farklı hızlarda akması sınırda türbülans oluşturmaktadır. Özellikle hava aracı inerken ve kalkarken çok tehlikelidir.(windshear) Fırtına (Thunderstorms): Fırtınalar şimşek çakmasıyla birlikte geldiği için şimşek çakmaları fırtınaların bir habercisi olarak görülmektedir. 133
134 Hava Radarı Ticari uçuşlarda bulundurulması gereken bir ekipmandır. Gönderilen sinyalin yansıması temelli bir çalışma prensibi vardır. Radar anteninden gönderilen bir sinyal bulutlardaki su damlacıklarına çarparak geri yansır. Radar alıcısı tarafından alınan bu yansıların şiddetine ve yönüne göre radar ekranında fırtına bölgelerinin renkli bir taslağı çıkarılır. Radar ekranındaki renk kodları: Renklendirme için 5 renk kullanılır. Renklendirme ölçütü saatte düşen yağmur miktarıdır. Tehlike şiddetine göre artan sıralamada: siyah, yeşil, sarı, kırmızı ve magenta. Yeşil alanlarda uçulabilir, sarı bölgelerden kaçınılmalı, kırmızı ve magenta olan bölgelerin civarında çok dikkatli uçulmalıdır. 134
135 Türbülans tespit sistemi: İlk radarlar yağmur damlalarının düşey hareketini algılarken daha sonraları yataydaki hareketler de algılanmaya başlamıştır. Yağmur damlalarının yataydaki hareketi kuvvetli rüzgarların güçlü bir sinyalidir. Yataydaki hareket, Doppler Shift metoduyla (Yansıların frekansı yağmur damlalarının hareket yönüne göre değişmektedir) çalışan türbülans tespit sistemleriyle algılanmaktadır. 135
136 Şimşek Çakması Tespit Yöntemi Güçlü hava akımlarının hareketleri sırasında sürtünmenin etkisiyle oluşan statik elektriğin eşik değeri geçmesi ile bulutlar arasında veya bulutlarla yer arasında elektriksel boşalma olur. Bu esnada hava ısınır ve genişler, bunun sonucu olarak gök gürültüsü ve radyo sinyalleri yayılır. Oluşan bu radyo dalgaları türbülans noktasının göstergeleridir. Stormscope Radar anteni gerektirmediği için özellikle tek motorlu uçaklarda kullanılır. Stormscope şimşek çakmasından dolayı oluşan radyo dalgalarının yoğunlaştığı frekans olan 50 khz civarına ayarlanır. Elektronik ekranda her şimşek çaktığında bir nokta işaretlenir ve fırtına bölgeleri oluşturulur. Şimşeğin yeri belirlenirken gelen radyo dalgalarının şiddetine bakılır. Uzakta ve şiddetli fırtına belirtisi olan dalgalar ile yakında ve zayıf olanların ayrımı ise dalgaların sıklığı ile anlaşılır. Büyük fırtınalar birim zamanda daha fazla şimşek çakması oluşturur. 136
137 137
 Hava durumu tespitine yeni bir ekleme olan veri aktarımı yöntemiyle hava durumu yer istasyonlarından uydular")
138 Veri Aktarımı (Datalink) Hava durumu tespitine yeni bir ekleme olan veri aktarımı yöntemiyle hava durumu yer istasyonlarından uydular aracılığı ile hava araçlarına hava durumu bilgileri aktarılır. Gerekli olan sadece bir alıcı ve bilginin görüntüleneceği ekrandır. 138
139 Bu sistem rüzgar makaslarını pilottan önce fark edip ona göre rüzgar makasından nasıl geçileceği bilgisini pilota sunar. Temel çalışma prensibi hava hızı, yer hızı ve eylemsizlik kuvvetlerini ölçüp bunlardaki aşırı sapmaları tespit etmektir. Sıcaklık gibi bazı yardımcı öğelerin de ölçümlerini gösterir. (Rüzgar makasları çoğunlukla ani sıcaklık değişikliklerine sebep olurlar.) 139
140 Temel bileşenlerinden olan transponder ile birlikte çalışır. Ama en önemli bileşeni TCAS işlemcisidir. İşlemci sistem yazılımını koşturur. Yaklaşık 40 mil menzilindeki uçakların bilgisini alıp, hareketlerini izleyip çok kısa sürede işleyerek uygun komutları pilota iletir. Hava trafik kontrolden (ATC) bağımsız olarak iki uçak arasındaki koordinasyonu sağlar. NOT: TCAS a alternatif olarak GPS ve Uydu tabanlı çarpışma önleyici sistemler geliştirilmektedir. 140
141 Saniyede bir kez TCAS ın transponder ı otomatik olarak bir sorgulama yayımlar. Yayımlanan sinyal trafik gözetim radarının (SSR) yayımladığı sinyalin aynısıdır. Menzildeki uçaklar sorgulamaya yanıt verir. Birinci uçak gönderilen ve alınan sinyal arasındaki süre farkından diğer uçağa olan uzaklığını, sorgulama sonucu gelen bilgiden uçağın irtifasını ve yönlü antenlerle de yönünü belirler. NOT: Eğer karşıdaki uçak Mode-S transponder a sahip ise uçağın adres bilgisi de öğrenilebilir. Alınan bilgiler işlendikten sonra uzaklık değişim oranı hesaplanır ve buna göre çarpışma tehlikesi olup olmadığı belirlenir; eğer var ise uygun manevralar her iki uçağın pilotuna da iletilir. Koordinasyon bilgileri diğer uçağa datalink ile aktarılır. 141
142 Kontrol paneli: TCAS ve Transponder fonksiyonlarını kontrol eder Alt ve üst anten: Transponder için geniş kapsama alanı oluşturur. TCAS Bilgisayarı: Toplanan verileri işler ve karar verir. Yönlü Antenler: Diğer uçağın yönünü belirler. TA/RA Ekranı: TCAS bilgisayarı tarafından verilen uyarıları gösterir. 142
143 Trafik Önerileri (Traffic Advisory): 45 saniye mesafede muhtemel bir tehdit unsuru olduğunu belirtir. Pilotun tehlikenin farkında olmasını sağlar. Çözüm Önerileri (Resolution Advisory): Tehlikenin arttığının işaretidir. Tehdit unsurunun 30 saniye mesafede olduğunu belirtir. Pilota çarpışmayı önleyecek komutlar verir. 143
144 TCAS-I Sadece trafik önerileri sunar. Semboller, uyarılar ve ekran TCAS-II ile aynıdır TCAS-II Büyük ölçekli uçaklarda kullanılır. Çarpışma önleme yazılımı tam olarak koşmaktadır; hem trafik (TA) hem de çözüm (RA) önerileri oluşturmaktadır TCAS-III Diğer sistemlerden farklı olarak yatayda da kaçma hareketleri sunmaktadır; fakat bu hareketler yeni çarpışma patikaları oluşturabileceği için kullanılmamaktadır. 144
145 Whisper-Shout Transpoder, sorgulamalarını düşük güçte (2 watt) yapmaya başlar (Whisper). Bu sorgulamalar yakında bulunan ve transponder hassaslığı yüksek olan uçaklar tarafından cevaplanır. Daha uzaktaki uçaklara sorgulama yollamak için transponder gücünü yavaş yavaş arttırır. Bunu yaparken daha önce sorgulanan araçlardan gelen cevapları bastıracak bir sinyal de yayımlar. Böylece sadece uzaktaki araçların cevapları alınır. Güç 250 watt kadar olabilir (Shout) Yönlü Sorgulama (Directional Interrogation) Sorgulamalar yönlü antenler aracılığıyla yapılmaktadır. Antenler 90 derecelik dilimler halinde sorgulama yaparak sadece aktif dilimdeki araçlar cevap vermekte, böylece aşırı yüklenme önlenmektedir. 145
146 146
147 Sistem: Belirli amaçlar ve görevler setini yerine getirmek üzere bir arada bulunan elemanlar setidir. Mimari: Uluslararası sistem mühendisliği konseyi (INCOSE) altındaki sistem mühendisliği çalışma grubuna göre, mimari; işlevlerin sistem isterlerini karşılayacak şekilde elemanlara ve alt sistemlere atanmasıdır. 147
148 Dağınık (Federe) Mimariler Çeşitli aviyonik ekipmanların birbirine direk bağlandığı mimari çeşididir. Dağınık Mimarilerin Temel Özellikleri: Sistem içerisindeki her bir alt sistem ve ekipman birbirinden bağımsız olarak çalışır; örneğin verici ünitesi karşıdaki alıcı ünitesinin çalışmasından bağımsız olarak veri göndermeye devam eder. Sistem elemanlarının tek bağlantısı veri aldıkları kaynak ve güç kaynağı bağlantısıdır. Küçük ölçekli çözümler geliştirmekte yaygın olarak kullanılır. Dağınık Mimari Gerçekleştirebileceğimiz işlevler alıcı ünitenin yetenekleri ile sınırlıdır. 148
149 Tümleşik (Entegre) Mimariler İşlem yükünün mümkün olduğunca bir merkez üzerinde toplandığı mimari çeşididir. Tümleşik Mimarilerin Temel Özellikleri: Merkezi ünite genellikle bir bilgisayardır. Gerekli tüm hesaplamalar bu ünite üzerinde gerçekleştirilir. Dağınık mimariye göre daha modern ve karmaşık sistemlerde kullanılır. Bu tip mimarinin kullanıldığı sistemlere «yazılım yoğun» (software-intensive) sistemler de denir. Çeşitli vericilerden alınan veri, merkezi bilgisayarda koşturulan yazılım ile işlenerek çok daha karmaşık bilgiler elde edilebilir. Merkezi mimariler merkezi veri yolları ile birlikte gerçekten işlevsellik kazanır. 149
150 Karma Mimariler Tümleşik mimarilere dağınık mimari öğelerinin de eklendiği sistemlere karma mimariler denir. Karma Mimarilerin Temel Özellikleri: Tümleşik mimarilerde bazı işlemleri merkezi bilgisayar üstünde yapmak çok masraflı veya gereksiz olabilir. Bu durumda dağınık mimari kullanılır. En uygun ve en yaygın modern mimari biçimidir. Çözümlerin etkinliğinin arttırılmasında ve iş yükü dağılımında önemli kazançlar sağlar. 150
151 151
152 Standart dijital veri aktarım arayüzlerinin gelişmesi ile birlikte hava aracı sistemleri arası iletişim oldukça gelişmiştir. Standart arayüzlerle birlikte: Ekipmanlar arası iletişimi sağlayan kablo miktarı önemli derecede azalmıştır. Sistem elemanlarının değişik marka ve yenileri ile değişimi mümkün kılınmıştır. Yaygın veri aktarım arayüz çeşitleri: Tek kaynak, tek hedef Ekipmanlar arası birebir bağlantı sağlayan bu teknik, sistem entegrasyonlarında günümüzde tercih edilmemektedir. Tek kaynak, çoklu hedef Tek kaynaktan çıkıp birden çok hedefe veri götürülen bir aktarım çeşididir. ARINC-429 arayüzü bu türün bir örneğidir. Sivil havacılıkta ve özel jetlerde yaygın olarak kullanılır. Çoklu kaynak, çoklu hedef Birden çok kaynaktan birden çok hedefe veri iletimi yapılmaktadır. Genellikle askeri kullanıcılar tarafından tercih edilmektedir. MIL-STD-1553B bir örneğidir. 152
153 ARINC-429 tek kaynak-çoklu hedef modunda çalışan bir veri aktarım arayüzüdür. Sadece tek yönde veri akışını desteklemektedir. Uygulamada manyetik girişimi ve gürültüyü engellemek için genellikle topraklanmış korumalı, çiftlenmiş kablolar (screened, twisted wire pair with the screen earthed) kullanılır. Veri iki kabloda aktarılır ve biri diğerinin tersi veriyi taşır; kablonun birindeki voltaj sıfırdan +5 volta çıkıyorsa diğerinde ise sıfırdan -5 volta düşmektedir. 153
154 Bir verici ünitesi 20 tane alıcıya kadar destek vermektedir. Veri aktarımı düşük hızda, kbits/s; veya yaygın olarak yüksek hızda,100 kbits/s, yapılır. Bir verici birden fazla veri sağlayabilir; ancak her alıcı sadece kendi işine yarayan veriyi algılar. 154
155 Aktarılan mesajlar eş zamanlı mesajlar değildir. Veri akışı her an olabilir. Veri akışı olmadığı zaman sistem kendini boşa (null state) alır, sistemde voltaj yoktur. Mesaj aktarılacağı zaman mesaj tanımlayıcı bir bit gönderilir ve alıcı mesaj almaya hazır hale getirilir. Veri paketler halinde aktarılır ve ilk uyarıcı bit ile veri bitleri arasında karışıklığı önlemek için 4 bitlik boşluk (idle) bırakılır. Sistemde oluşabilecek kayıplardan dolayı sinyallerde belli bir tolerans aralığı vardır. 155
156 ARINC-429 sisteminde 3 adet durum söz konusudur: logic-1, null state, logic
157 Veri kodlanırken her biti tanımlamak için periyodun ortasında voltaj null seviyesine düşer ve periyot sonunda tekrar işlenen veriye göre yüksek voltaj veya düşük voltaj seviyesine sıçrar. Bir veri paketi 32 bitten oluşur. Ve paketler arasında 4 bit süresi bir boşluk bırakılır. Zamanlama otomatik ayarlanmış olur (self-clocking signal). İki kutuplu sıfıra dönümlü kodlama: ARINC sinyali bir kablo çiftinde birbirinin tersi olan iki sinyal olarak taşınır ve bu sinyalleri oluşturan her bir biti kodlayan voltaj seviyeleri bit periyodunun ortasında sıfıra döner. Buna iki kutuplu sıfıra dönümlü kodlama denir. 157
158 Parametre Yüksek Veri Hızı Düşük Veri Hızı Bit Hızı 100 kbit/s kbit/s Bit Süresi (Y) 10 µs ± 2.5 % 1/(Bit Hızı) µs ± 2.5 % Yarı Süre (X) 5 µs ± 5 % Y/2 µs ± 5 % Yetişme Hızı 1.5 ± 0.5 µs 10 ± 5 µs 158
159 ARINC mesajları temelde 5 bölümden oluşur: Eşitleme Biti (Parity): 32 bitlik dizinin 32. biti eşitleme bitidir. Bazı testler dışında, 32 bitlik dizindeki tek bit kodu sayısının («1») tek olması sağlanır. Bunu sağlayan bit 32. bittir. İlk 31 bitte tek sayıda «1» varsa son bit boş kalır; eğer çift sayıda bit varsa eşitleme bitine «1» atanarak tek sayıda «1» olması sağlanır. İşaret/Durum Dizini (Sign/Status Matrix-SSM): 30. ve 31. bitlerdir. Donanımların durumu, çalışma modu ve verinin geçerliliği konusunda bilgi taşır. Veri (Data): bitleri arası aktarılacak verinin kodlandığı yerdir. Bu kodlama çeşitli şekillerde olabilir. Bazen veri SDI bölümüne de taşabilir. Bu durumda SDI kullanılmaz. Kaynak/Hedef Tanımlayıcı (SDI): 9. ve 10. bitler. Gönderilen verinin hangi alıcıya hedeflendiğini belirtir. Çoklu vericili sistemlerde verinin kaynağını belirtir. Etiket (Label): 1-8 arası bitlerdir. Veri tipini ve onunla ilgili parametreleri belirtir. Ayrıca verinin kodlanma çeşidini belirterek okunmasını sağlar. NOT: Veri Aktarım Sırası: 8, 7, 6, 5, 4, 3, 2, 1, 9, 10, 11,..., 29, 30, 31,
160 Çoklu kaynak, çoklu hedef bir veri aktarım arayüzüdür. ARINC-429 a göre daha hızlı bir arayüzdür. Veri hızı 1Mb/s. Çift yönlü iletişim ile güvenilirlik artmıştır. Gönderilen bilginin alındı bilgisi yöneticiye iletilir. Bir hat üstünde birden fazla gönderici ve alıcı bulunabilir. ARINC- 429 da sadece bir alıcı bulunabilmektedir. 160
 Veri Yolu Yöneticisi (Bus Controller) Veri Yolu Gözetleyicisi (Bus Monitor)")
161 Standartta tanımlanan dört tane donanım elemanı bulunmaktadır: Veri Yolu (Data Bus) Terminaller (Remote Terminal) Veri Yolu Yöneticisi (Bus Controller) Veri Yolu Gözetleyicisi (Bus Monitor) 161
162 Korumalı çiftlenmiş kablolar veri yolunu oluşturur. Veri yoluna bağlanan her terminal için bir bağlantı noktası bulunur. Kablo çiftleri her bağlantı noktasında kendi karakteristik empedanslarına eşit bir direnç görmelidir. Bu sağlandığında veri yolu elektriksel olarak sonsuz bir veri iletim hattı gibi davranacak ve veri kaybı en aza indirilmiş olacaktır. Terminal Bağlantıları: Direk Bağlantı Transformatör Arayüzlü Bağlantı Veri yoluna direk bağlanır. Bağlantı mesafesi kısadır. Kablo yükünü arttırır. Veri yoluna transformatör aracılığıyla bağlanır. Bağlantı mesafesi uzundur. Kablo yükünü azaltır. Empedans uyumsuzlukları daha sık görülür. Empedans uyumsuzlukları daha az görülür. 162
163 Veri yolu, veri yolu yöneticisi ve veri yolu gözetleyicisi dışında kalan elektronik terminallerdir. Veri yolu ve alt sistemler arasındaki veri akışını sağlayan ekipmanlardır. Almaç/göndermeç ünitesi, kodlayıcı/çözümleyici, protokol kontrolcüsü, hafıza ünitesi ve alt sistem arayüzleri. 163
164 Veri akışını yönetmekten sorumlu sistem elemanıdır. Bir veri yolu üstünde birden fazla yönetici olabilir; fakat sadece biri aktif olarak çalışabilir. Veri yolunda yönetim komutlarını verme yetkisi olan tek ünitedir. Üç çeşit veri yolu yöneticisi vardır: Kelime Seviyesi Yönetici (Word Controller) Mesaj Seviyesi Yönetici (Message Controller) Dizin Seviyesi Yönetici (Frame Controller) 164
165 Veri yolundaki veri akışını gözetleyen sistem elemanıdır. Alınan bilgi devre dışı elemanlar için ve yedek yöneticiye gerekli bilgileri sağlamak için kullanır. Akan bütün bilgi alınabileceği gibi, seçilmiş bilgiler de alınabilir. İki çeşit gözetleyici bulunur: Test için veri kaydedici Yedek veri yolu yönetici destekçisi 165
166 Sözcük Tipleri: Kontrol, veri akışı, durum raporu ve veri yolu yönetimi 3 çeşit kelime (word) denen kendine özgü formatları olan iletişim birimleri kullanılarak yapılır. Emir Sözcükleri (Command Words) Terminal ekipmanlarını görevlendirir. Veri Sözcükleri (Data Words) Mesaj içindeki verinin kodlandığı birimdir. Durum Sözcükleri (Status Words) Gelen mesaja cevap olarak terminallerden gönderilen durum bilgisi taşıyan birimdir. 166
167 Sözcük tiplerinin ortak özellikleri 20 bit uzunluktan oluşur. İlk 3 bit senkronizasyon birimidir Sonraki 16 bit verinin kodlandığı alandır. Her sözcük tipinde değişik dizilim görülür. Son bit ise «parity» dir. ARINC-429 ile aynıdır. Kodlama her üçünde de ortak olarak Manchester-II formatında yapılır. «Selfclocking» bu formatta da görülür. Not: Veri işlenmesi voltaj seviyesine göre değil null seviyenin çaprazlanma kutbuna göre yapılır. Voltaj seviyesindeki değişim veri kaybına sebep olmaz. 167
168 Mesaj Formatı: Standartta tanımlanan 10 adet mesaj transfer formatı bulunmaktadır. Bu formatları iki ana grupta toplamak mümkündür. Veri Transfer Formatları (Information Transfer Formats) Gönderilen hatasız mesajlar terminaller tarafından algılanarak mesajların alındığına dair veri yolu yöneticisine durum bilgisi gönderilir. Yayınsal Veri Transfer Formatları (Broadcast Information Transfer Formats) Mesajlar bir defada birden çok alıcı terminale gönderilir. Mesajlar alındığında alıcı terminal durum bilgisi cevabını baskılar. Durum sorgulaması her alıcı için veri yolu yöneticisi tarafından daha sonra yapılır. 168
169 ARINC-429 ve MIL-STD-1553B den başka çeşitli aviyonik veri yolları bulunmaktadır. Bunlardan bazıları: CANbus: Mesaj tabanlı bir arayüz olup yaygın olarak otomotiv sektöründe kullanılmaktadır. Ayrıca endüstriyel otomasyon ve tıbbi cihazlarda da kullanılmaktadır. AFDX: Güvenlik kritik uygulamalarda kullanılan veri ağıdır. Hava aracı veri üniteleri arasındaki iletişimi sağlamak için kullanılır (Aircraft Data Network-ADN). ARINC-629: ARINC-429 un ötesinde çoklu vericiyle tek veri yolunu kullanan veri arayüzüdür. 169
170 Buckwalter, L., 2005, Avionics Training: Systems, Installation and Troubleshooting, Avionics Communication Inc., USA. Collinson, R.P.G., 2003, Introduction to Avionics Systems 2nd Ed., Kluwer Academic Publishers, U.K. Helfrick, A., 2002, Principles of Avionics 2nd Ed., Avionics Communication Inc., USA. Honeywell, 1988, Avionics Past & Present, USA. Moir, I., Seabridge, A., 2001, Aircraft Systems: Mechanical, Electrical, and Avionics Subsystems Integration, American Institute of Aeronautics and Astronautics Inc., USA. Stacey, D., 2008, Aeronautical Radio Communication Systems and Networks, John Wiley & Sons, England. United Airlines, Avionics Fundamentals, Jeppesen Sanderson Inc., California. 170


171 171
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI DME (DISTANCE MEASURING EQUIPMENT) MESAFE ÖLÇME CİHAZI DME (Mesafe Ölçme Cihazı) Havacılıkta yaygın olarak kullanılan bir radyo seyrüsefer yardımcısıdır. Taşıtın yer istasyonundan
SEYRÜSEFER VE YARDIMCILARI DME (DISTANCE MEASURING EQUIPMENT) MESAFE ÖLÇME CİHAZI DME (Mesafe Ölçme Cihazı) Havacılıkta yaygın olarak kullanılan bir radyo seyrüsefer yardımcısıdır. Taşıtın yer istasyonundan
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI VOR (VHF Çok Yönlü Radyo Seyrüsefer İstikamet Cihazı) VHF bandında çok yönlü radyo yayını olarak bilinen VOR, uluslararası standartta orta ve kısa mesafe seyrüsefer (navigasyon)
SEYRÜSEFER VE YARDIMCILARI VOR (VHF Çok Yönlü Radyo Seyrüsefer İstikamet Cihazı) VHF bandında çok yönlü radyo yayını olarak bilinen VOR, uluslararası standartta orta ve kısa mesafe seyrüsefer (navigasyon)
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI NDB ve ADF NDB (NON DİRECTİONAL RADİO BEACON) (Yönlendirilmemiş Radyo Bikını) NDB Yön belirlemeye yarayan cihazlardandır. Günümüzde hava seyrüseferlerinde pek kullanılmayan ancak,
SEYRÜSEFER VE YARDIMCILARI NDB ve ADF NDB (NON DİRECTİONAL RADİO BEACON) (Yönlendirilmemiş Radyo Bikını) NDB Yön belirlemeye yarayan cihazlardandır. Günümüzde hava seyrüseferlerinde pek kullanılmayan ancak,
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI Radar, radyo dalgası yardımı ile cisimlerin bir bölgeden, yüzeyden veya cisimden yansıması prensibini kullanır. Bu prensip sayesinde nesnenin hızı, mesafesi ve kendisinin belirlenmesi
SEYRÜSEFER VE YARDIMCILARI Radar, radyo dalgası yardımı ile cisimlerin bir bölgeden, yüzeyden veya cisimden yansıması prensibini kullanır. Bu prensip sayesinde nesnenin hızı, mesafesi ve kendisinin belirlenmesi
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI Radar, radyo dalgası yardımı ile cisimlerin bir bölgeden, yüzeyden veya cisimden yansıması prensibini kullanır. Bu prensip sayesinde nesnenin hızı, mesafesi ve kendisinin belirlenmesi
SEYRÜSEFER VE YARDIMCILARI Radar, radyo dalgası yardımı ile cisimlerin bir bölgeden, yüzeyden veya cisimden yansıması prensibini kullanır. Bu prensip sayesinde nesnenin hızı, mesafesi ve kendisinin belirlenmesi
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI BU SUNUMUN İÇERİĞİ İNİŞ SİSTEMLERİ ILS (INSTRUMENT LANDING SYSTEM) MLS (MICROWAVE LANDING SYSTEM) ILS (ALETLİ İNİŞ SİSTEMİ) Aletli iniş sistemi olarak tanımlanan ILS sistemi,
SEYRÜSEFER VE YARDIMCILARI BU SUNUMUN İÇERİĞİ İNİŞ SİSTEMLERİ ILS (INSTRUMENT LANDING SYSTEM) MLS (MICROWAVE LANDING SYSTEM) ILS (ALETLİ İNİŞ SİSTEMİ) Aletli iniş sistemi olarak tanımlanan ILS sistemi,
Profesyonel Dedektör Serisi Alarm vermesi ve vermemesi gereken zamanları çok iyi bilir. Artık sprey algılamalı çok noktalı anti-mask teknolojisi ile!
 Profesyonel Dedektör Serisi Alarm vermesi ve vermemesi gereken zamanları çok iyi bilir Artık sprey algılamalı çok noktalı anti-mask teknolojisi ile! Üstün Bosch teknolojisi yakalama performansını artırır
Profesyonel Dedektör Serisi Alarm vermesi ve vermemesi gereken zamanları çok iyi bilir Artık sprey algılamalı çok noktalı anti-mask teknolojisi ile! Üstün Bosch teknolojisi yakalama performansını artırır
FOG COPILOT & FOG OSD V2.1 OTO PİLOT SİSTEMİ
 2013 FOG COPILOT & FOG OSD V2.1 OTO PİLOT SİSTEMİ Fatih GENÇ www.modelhobbyprojects.com 23.04.2013 www.modelhobbyprojects.com Sayfa 0 1- ÜRÜN İÇERİĞİ FOG COPILOT FOG OSD V2.1 10Hz GPS 100A Akım Sensörü
2013 FOG COPILOT & FOG OSD V2.1 OTO PİLOT SİSTEMİ Fatih GENÇ www.modelhobbyprojects.com 23.04.2013 www.modelhobbyprojects.com Sayfa 0 1- ÜRÜN İÇERİĞİ FOG COPILOT FOG OSD V2.1 10Hz GPS 100A Akım Sensörü
YER HİZMETLERİ VE RAMP - I. Öğr. Gör. Gülaçtı ŞEN
 YER HİZMETLERİ VE RAMP - I Öğr. Gör. Gülaçtı ŞEN Kokpit daha çok uçan araçların olmakla birlikte genelde bir aracın sürücüsünün bulunduğu bölüme verilen isimdir. Bu bölüm çoğunlukla aracın ön kısmında
YER HİZMETLERİ VE RAMP - I Öğr. Gör. Gülaçtı ŞEN Kokpit daha çok uçan araçların olmakla birlikte genelde bir aracın sürücüsünün bulunduğu bölüme verilen isimdir. Bu bölüm çoğunlukla aracın ön kısmında
Antenler, Türleri ve Kullanım Yerleri
 Antenler, Türleri ve Kullanım Yerleri Sunum İçeriği... Antenin tanımı Günlük hayata faydaları Kullanım yerleri Anten türleri Antenlerin iç yapısı Antenin tanımı ve kullanım amacı Anten: Elektromanyetik
Antenler, Türleri ve Kullanım Yerleri Sunum İçeriği... Antenin tanımı Günlük hayata faydaları Kullanım yerleri Anten türleri Antenlerin iç yapısı Antenin tanımı ve kullanım amacı Anten: Elektromanyetik
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI OMEGA Askeri amaçlı olarak A.B.D. tarafından 1982 yılında kurulmuş ve uzun menzilli uçuşlarda uçağın dünyanın neresinde olduğunu bildiren bir radyo seyrüsefer yardımcısıdır.
SEYRÜSEFER VE YARDIMCILARI OMEGA Askeri amaçlı olarak A.B.D. tarafından 1982 yılında kurulmuş ve uzun menzilli uçuşlarda uçağın dünyanın neresinde olduğunu bildiren bir radyo seyrüsefer yardımcısıdır.
Bir bölgede başka bir bölgeye karşılıklı olarak, veri veya haberin gönderilmesini sağlayan.sistemlerdir.
 1.1.3. Scada Yazılımından Beklenenler Hızlı ve kolay uygulama tasarımı Dinamik grafik çizim araçları Çizim kütüphaneleri Alarm yönetimi Tarih bilgilerinin toplanması Rapor üretimi 1.1.4. Scada Sistemleri
1.1.3. Scada Yazılımından Beklenenler Hızlı ve kolay uygulama tasarımı Dinamik grafik çizim araçları Çizim kütüphaneleri Alarm yönetimi Tarih bilgilerinin toplanması Rapor üretimi 1.1.4. Scada Sistemleri
Elektromanyetik dalgalar kullanılarak yapılan haberleşme ve data iletişimi için frekans planlamasının
 2. FREKANS TAHSİS İŞLEMLERİ 2.1 GENEL FREKANS TAHSİS KRİTERLERİ GENEL FREKANS TAHSİS KRİTERLERİ Elektromanyetik dalgalar kullanılarak yapılan haberleşme ve data iletişimi için frekans planlamasının yapılması
2. FREKANS TAHSİS İŞLEMLERİ 2.1 GENEL FREKANS TAHSİS KRİTERLERİ GENEL FREKANS TAHSİS KRİTERLERİ Elektromanyetik dalgalar kullanılarak yapılan haberleşme ve data iletişimi için frekans planlamasının yapılması
Kapı Tipi Metal Arama Dedektörleri
 Kapı Tipi Metal Arama Dedektörleri Ürün Teknik Özellikleri Teknoloji : DSP (Dijital Sinyal İşleme Teknolojisi) Zone Sayısı : 8 Bölge (Multizone), Her Bölge için Farklı Hassasiyet Atama özelliği 0-999 arası
Kapı Tipi Metal Arama Dedektörleri Ürün Teknik Özellikleri Teknoloji : DSP (Dijital Sinyal İşleme Teknolojisi) Zone Sayısı : 8 Bölge (Multizone), Her Bölge için Farklı Hassasiyet Atama özelliği 0-999 arası
Şekil 2: Kanat profili geometrisi
 Kanat Profili ve Seçimi Şekil 1: İki boyutlu akım modeli Herhangi bir kanat, uçuş doğrultusuna paralel olarak (gövde doğrultusunda) kesildiğinde şekil 1 olduğu gibi bir görüntü elde edilir. Şekil 2: Kanat
Kanat Profili ve Seçimi Şekil 1: İki boyutlu akım modeli Herhangi bir kanat, uçuş doğrultusuna paralel olarak (gövde doğrultusunda) kesildiğinde şekil 1 olduğu gibi bir görüntü elde edilir. Şekil 2: Kanat
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI BİLGİLENDİRME 25 Ekim 2016 Tarihi 1. Quiz BU SUNUMUN İÇERİĞİ Seyrüsefer Yöntemleri Radyo Seyrüsefer Yardımcıları Elektromanyetik Dalga Modülasyon SEYRÜSEFERİN TANIMI Seyrüsefer,
SEYRÜSEFER VE YARDIMCILARI BİLGİLENDİRME 25 Ekim 2016 Tarihi 1. Quiz BU SUNUMUN İÇERİĞİ Seyrüsefer Yöntemleri Radyo Seyrüsefer Yardımcıları Elektromanyetik Dalga Modülasyon SEYRÜSEFERİN TANIMI Seyrüsefer,
Data Communications. Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü. 5. Analog veri iletimi
 Veri İletişimi Data Communications Suat ÖZDEMİR Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü 5. Analog veri iletimi Sayısal analog çevirme http://ceng.gazi.edu.tr/~ozdemir/ 2 Sayısal analog çevirme
Veri İletişimi Data Communications Suat ÖZDEMİR Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü 5. Analog veri iletimi Sayısal analog çevirme http://ceng.gazi.edu.tr/~ozdemir/ 2 Sayısal analog çevirme
 Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Endüstriyel Sensörler ve Uygulama Alanları Kalite kontrol amaçlı ölçme sistemleri, üretim ve montaj hatlarında imalat sürecinin en önemli aşamalarındandır. Günümüz teknolojisi mükemmelliği ve üretimdeki
Aviyonik Sistemler Bakımı (AEE402) Ders Detayları
 Ders Detayları") Aviyonik Sistemler Bakımı (AEE402) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Aviyonik Sistemler Bakımı AEE402 Bahar 1 5 5 3.5 6 Ön Koşul Ders(ler)i
Aviyonik Sistemler Bakımı (AEE402) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Aviyonik Sistemler Bakımı AEE402 Bahar 1 5 5 3.5 6 Ön Koşul Ders(ler)i
Mobil ve Kablosuz Ağlar (Mobile and Wireless Networks)
") Mobil ve Kablosuz Ağlar (Mobile and Wireless Networks) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Ders konuları 2 1 Kodlama ve modülasyon yöntemleri İletim ortamının özelliğine
Mobil ve Kablosuz Ağlar (Mobile and Wireless Networks) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Ders konuları 2 1 Kodlama ve modülasyon yöntemleri İletim ortamının özelliğine
Doğrudan Dizi Geniş Spektrumlu Sistemler Tespit & Karıştırma
 Doğrudan Dizi Geniş Spektrumlu Sistemler Tespit & Karıştırma Dr. Serkan AKSOY Gebze Yüksek Teknoloji Enstitüsü Elektronik Mühendisliği Bölümü [email protected] Geniş Spektrumlu Sistemler Geniş Spektrumlu
Doğrudan Dizi Geniş Spektrumlu Sistemler Tespit & Karıştırma Dr. Serkan AKSOY Gebze Yüksek Teknoloji Enstitüsü Elektronik Mühendisliği Bölümü [email protected] Geniş Spektrumlu Sistemler Geniş Spektrumlu
SEYRÜSEFER VE YARDIMCILARI
 SEYRÜSEFER VE YARDIMCILARI Hava ulaşım ve taşımacılığının güvenli bir şekilde yapılabilmesi için uçuş yolları boyunca belirli yerlerde ve havaalanlarında bulunan Seyrüsefer Yardımcı Cihazlarının uçaklara
SEYRÜSEFER VE YARDIMCILARI Hava ulaşım ve taşımacılığının güvenli bir şekilde yapılabilmesi için uçuş yolları boyunca belirli yerlerde ve havaalanlarında bulunan Seyrüsefer Yardımcı Cihazlarının uçaklara
Yazılım Tabanlı HF Telsiz Ailesi.
 Yazılım Tabanlı HF Telsiz Ailesi www.aselsan.com.tr HF TELSİZLER ASELSAN HF Telsiz Ailesi, 1.6-30 MHz bandında Kara, Deniz ve Hava Platformlarında, güvenilir ve emniyetli haberleşme imkanını Yazılım Tabanlı
Yazılım Tabanlı HF Telsiz Ailesi www.aselsan.com.tr HF TELSİZLER ASELSAN HF Telsiz Ailesi, 1.6-30 MHz bandında Kara, Deniz ve Hava Platformlarında, güvenilir ve emniyetli haberleşme imkanını Yazılım Tabanlı
HABERLEŞMENIN AMACI. Haberleşme sistemleri istenilen haberleşme türüne göre tasarlanır.
 2 HABERLEŞMENIN AMACI Herhangi bir biçimdeki bilginin zaman ve uzay içinde, KAYNAK adı verilen bir noktadan KULLANICI olarak adlandırılan bir başka noktaya aktarılmasıdır. Haberleşme sistemleri istenilen
2 HABERLEŞMENIN AMACI Herhangi bir biçimdeki bilginin zaman ve uzay içinde, KAYNAK adı verilen bir noktadan KULLANICI olarak adlandırılan bir başka noktaya aktarılmasıdır. Haberleşme sistemleri istenilen
9. Güç ve Enerji Ölçümü
 9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
9. Güç ve Enerji Ölçümü Güç ve Güç Ölçümü: Doğru akım devrelerinde, sürekli halde sadece direnç etkisi mevcuttur. Bu yüzden doğru akım devrelerinde sadece dirence ait olan güçten bahsedilir. Sürekli halde
Kızılötesi. Doğrudan alınan güneşışığı %47 kızılötesi, %46 görünür ışık ve %7 morötesi ışınımdan oluşur.
 Kızılötesi Kızılötesi (IR: Infrared), nispeten daha düşük seviyeli bir enerji olup duvar veya diğer nesnelerden geçemez. Radyo frekanslarıyla değil ışık darbeleriyle çalışır. Bu nedenle veri iletiminin
Kızılötesi Kızılötesi (IR: Infrared), nispeten daha düşük seviyeli bir enerji olup duvar veya diğer nesnelerden geçemez. Radyo frekanslarıyla değil ışık darbeleriyle çalışır. Bu nedenle veri iletiminin
EnerjiÖlçümü MINOMETER M7 RADIO 3. Elektronik Isı Pay Ölçer
 EnerjiÖlçümü MINOMETER M7 RADIO 3 Elektronik Isı Pay Ölçer Çevrenin Korunması Avantaj ve Özellikleri İklim koruma için enerji tüketiminin ölçümü Kaynakların ve çevrenin korunması Günümüzde; çevremiz, korunmaya
EnerjiÖlçümü MINOMETER M7 RADIO 3 Elektronik Isı Pay Ölçer Çevrenin Korunması Avantaj ve Özellikleri İklim koruma için enerji tüketiminin ölçümü Kaynakların ve çevrenin korunması Günümüzde; çevremiz, korunmaya
 Geometrik nivelmanda önemli hata kaynakları Nivelmanda oluşabilecek model hataları iki bölümde incelenebilir. Bunlar: Aletsel (Nivo ve Mira) Hatalar Çevresel Koşullardan Kaynaklanan Hatalar 1. Aletsel
Geometrik nivelmanda önemli hata kaynakları Nivelmanda oluşabilecek model hataları iki bölümde incelenebilir. Bunlar: Aletsel (Nivo ve Mira) Hatalar Çevresel Koşullardan Kaynaklanan Hatalar 1. Aletsel
İletişim Ağları Communication Networks
 İletişim Ağları Communication Networks Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, Behrouz A. Forouzan, Data Communications and Networking 4/E, McGraw-Hill,
İletişim Ağları Communication Networks Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Bu dersin sunumları, Behrouz A. Forouzan, Data Communications and Networking 4/E, McGraw-Hill,
Baþlangýç. Nokia N82
 Baþlangýç Model: N82-1 Nokia N82 1. baský TR Tuþlar ve parçalar (ön) Model numarasý: Nokia N82-1. Bundan sonra Nokia N82 olarak anýlacaktýr. 1 Açma/kapatma tuþu 2 Uyumlu kulaklýklar, müzik kulaklýklarý
Baþlangýç Model: N82-1 Nokia N82 1. baský TR Tuþlar ve parçalar (ön) Model numarasý: Nokia N82-1. Bundan sonra Nokia N82 olarak anýlacaktýr. 1 Açma/kapatma tuþu 2 Uyumlu kulaklýklar, müzik kulaklýklarý
EEM HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ
 EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
EEM3006 - HABERLEŞME TEORİSİ NİĞDE ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EEM3006 - HABERLEŞME TEORİSİ Dersin Öğretim Elemanı: Yrd. Doç. Dr. Yasin KABALCI Ders Görüşme
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ Elektrik ve Elektronik Ölçmeler Laboratuvarı Deney Adı: Sensörler. Deney 5: Sensörler. Deneyin Amacı: A.
 Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
Deneyin Amacı: Deney 5: Sensörler Sensör kavramının anlaşılması, kullanım alanlarının ve kullanım yerine göre çeşitlerinin öğrenilmesi. Çeşitli sensör tipleri için çalışma mantığı anlaşılıp sağlamlık testi
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri
 Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri") YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
YAKLAŞIM SENSÖRLERİ (PROXIMITY) Endüktif, Kapasitif ve Optik Yaklaşım Sensörleri Sanayi fabrika otomasyonunda proximity (yaklasım) sensorler kullanılır. Porximity sensorler profesyonel yapıda cevre sartlarından
Mobil ve Kablosuz Ağlar (Mobile and Wireless Networks)
") Mobil ve Kablosuz Ağlar (Mobile and Wireless Networks) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Ders konuları Sinyaller Sinyallerin zaman düzleminde gösterimi Sinyallerin
Mobil ve Kablosuz Ağlar (Mobile and Wireless Networks) Hazırlayan: M. Ali Akcayol Gazi Üniversitesi Bilgisayar Mühendisliği Bölümü Ders konuları Sinyaller Sinyallerin zaman düzleminde gösterimi Sinyallerin
Oterm EE101 Kablosuz Oda Termostatı. Oterm EE101 Kullanım Kılavuzu
 Oterm EE101 Kullanım Kılavuzu 1 EE101-TX EE101-RX 2 Oterm EE101 Kablosuz Oda Termostatı, kombiniz ile veya diğer ısıtma cihazları ile kullanabileceğiniz, evinizin konforunu artıran modern bir ısı kontrol
Oterm EE101 Kullanım Kılavuzu 1 EE101-TX EE101-RX 2 Oterm EE101 Kablosuz Oda Termostatı, kombiniz ile veya diğer ısıtma cihazları ile kullanabileceğiniz, evinizin konforunu artıran modern bir ısı kontrol
MODÜL-13 ÖRNEK SORULAR. 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir?
 MODÜL-13 ÖRNEK SORULAR 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir? A) Kanatçık (aileron) B) İrtifa dümeni (elevator) C) Flap 2. Kanadın üst yüzeyinde; A) Basınç artar, hız
MODÜL-13 ÖRNEK SORULAR 1. Aşağıdakilerden hangisi ana uçuş kontrol yüzeylerinden biri değildir? A) Kanatçık (aileron) B) İrtifa dümeni (elevator) C) Flap 2. Kanadın üst yüzeyinde; A) Basınç artar, hız
6. Osiloskop. Periyodik ve periyodik olmayan elektriksel işaretlerin gözlenmesi ve ölçülmesini sağlayan elektronik bir cihazdır.
 6. Osiloskop Periyodik ve periyodik olmayan elektriksel işaretlerin gözlenmesi ve ölçülmesini sağlayan elektronik bir cihazdır. Osiloskoplar üç gruba ayrılabilir; 1. Analog osiloskoplar 2. Dijital osiloskoplar
6. Osiloskop Periyodik ve periyodik olmayan elektriksel işaretlerin gözlenmesi ve ölçülmesini sağlayan elektronik bir cihazdır. Osiloskoplar üç gruba ayrılabilir; 1. Analog osiloskoplar 2. Dijital osiloskoplar
MANOMETRELER 3.1 PİEZOMETRE
 18 3 MANOMETRELER Düşük sıvı basınçlarını hassas olarak ölçmek için yaygın bir metot, bir veya birden fazla denge kolonu kullanan piezometre ve manometrelerin kullanılmasıdır. Burada çeşitli tipleri tartışılacaktır,
18 3 MANOMETRELER Düşük sıvı basınçlarını hassas olarak ölçmek için yaygın bir metot, bir veya birden fazla denge kolonu kullanan piezometre ve manometrelerin kullanılmasıdır. Burada çeşitli tipleri tartışılacaktır,
EET349 Analog Haberleşme Güz Dönemi. Yrd. Doç. Dr. Furkan Akar
 EET349 Analog Haberleşme 2015-2016 Güz Dönemi Yrd. Doç. Dr. Furkan Akar 1 Notlandırma Ara Sınav : %40 Final : %60 Kaynaklar Introduction to Analog and Digital Communications Simon Haykin, Michael Moher
EET349 Analog Haberleşme 2015-2016 Güz Dönemi Yrd. Doç. Dr. Furkan Akar 1 Notlandırma Ara Sınav : %40 Final : %60 Kaynaklar Introduction to Analog and Digital Communications Simon Haykin, Michael Moher
ProMark 800 ve GNSS Teknolojisindeki Büyük Gelişmeler. Türkiye Tek Yetkili Temsilcisi
 ProMark 800 ve GNSS Teknolojisindeki Büyük Gelişmeler Türkiye Tek Yetkili Temsilcisi 10.Eylül.2012 ProMark 800 ü Tanıtmak Spectra Precision dan yeni GNSS Alıcısı Trimble Firması Ashtech Firmasını kendi
ProMark 800 ve GNSS Teknolojisindeki Büyük Gelişmeler Türkiye Tek Yetkili Temsilcisi 10.Eylül.2012 ProMark 800 ü Tanıtmak Spectra Precision dan yeni GNSS Alıcısı Trimble Firması Ashtech Firmasını kendi
Gerçek Zamanlı kuzey Gerçek Zamanlı g
 Gerçek Zamanlı kuzey Gerçek Zamanlı g Özet Ahmet Yalçın - Ankara 007 XYZ : xyz : r(t) : Uzayda sabit referans koordinat sistemi, XYZ ye göre dönen koordinat sistemi xyz koordinat sistemi içindeki noktasal
Gerçek Zamanlı kuzey Gerçek Zamanlı g Özet Ahmet Yalçın - Ankara 007 XYZ : xyz : r(t) : Uzayda sabit referans koordinat sistemi, XYZ ye göre dönen koordinat sistemi xyz koordinat sistemi içindeki noktasal
Ürün Açıklaması : Küçük Ve Ergonomik Tasarım. Vox Özelliği: Ses Algılama. Kanal Monitör. Scrambler:Ses Karıştırma Özelliği
 Ürün Açıklaması : Küçük Ve Ergonomik Tasarım Vox Özelliği: Ses Algılama Kanal Monitör Scrambler:Ses Karıştırma Özelliği Otomatik Batarya Tasarruf Modu Meşgul Kanal Kilidi Gönderme Zaman Sınırlayıcı (TOT)
Ürün Açıklaması : Küçük Ve Ergonomik Tasarım Vox Özelliği: Ses Algılama Kanal Monitör Scrambler:Ses Karıştırma Özelliği Otomatik Batarya Tasarruf Modu Meşgul Kanal Kilidi Gönderme Zaman Sınırlayıcı (TOT)
Yazılım Tabanlı HF Telsiz Ailesi.
 Yazılım Tabanlı HF Telsiz Ailesi www.aselsan.com.tr YAZILIM TABANLI HF TELSİZ AİLESİ HF TELSİZLER ASELSAN HF Telsiz Ailesi, 1.6-30 MHz bandında Kara, Deniz ve Hava Platformlarında, güvenilir ve emniyetli
Yazılım Tabanlı HF Telsiz Ailesi www.aselsan.com.tr YAZILIM TABANLI HF TELSİZ AİLESİ HF TELSİZLER ASELSAN HF Telsiz Ailesi, 1.6-30 MHz bandında Kara, Deniz ve Hava Platformlarında, güvenilir ve emniyetli
ATIŞ, TEST VE DEĞERLENDİRME MERKEZİ Konya-Karapınar-TÜRKİYE
 ATIŞ, TEST VE DEĞERLENDİRME MERKEZİ Konya-Karapınar-TÜRKİYE ATDM-I Projesi, NATO Destek ve Tedarik Ajansı (NSPA) ile ROKETSAN arasında imzalanan sözleşme ile anahtar teslim bir proje olarak Millî Savunma
ATIŞ, TEST VE DEĞERLENDİRME MERKEZİ Konya-Karapınar-TÜRKİYE ATDM-I Projesi, NATO Destek ve Tedarik Ajansı (NSPA) ile ROKETSAN arasında imzalanan sözleşme ile anahtar teslim bir proje olarak Millî Savunma
FİBER OPTİK ÜTÜLEME DIODE LAZER!
 ÜTÜLEME DIODE LAZERDE EN SON TEKNOLOJİ FCD FİBER OPTİK ÜTÜLEME DIODE LAZER! HAFİF EN BAŞLIĞI (300 gr) DÜNYANIN 60.000.000 ATIŞ ÖMRÜ 20.000.000 Garanti 2 YIL GARANTİ BUZ BAŞLIK K142186/878.4810 17.04.2015
ÜTÜLEME DIODE LAZERDE EN SON TEKNOLOJİ FCD FİBER OPTİK ÜTÜLEME DIODE LAZER! HAFİF EN BAŞLIĞI (300 gr) DÜNYANIN 60.000.000 ATIŞ ÖMRÜ 20.000.000 Garanti 2 YIL GARANTİ BUZ BAŞLIK K142186/878.4810 17.04.2015
Çözümleri TRAFİK ÖLÇÜM SİSTEMLERİ. İSBAK A.Ş., İstanbul Büyükşehir Belediyesi iştirakidir.
 Çözümleri TRAFİK ÖLÇÜM SİSTEMLERİ İSBAK A.Ş., İstanbul Büyükşehir Belediyesi iştirakidir. Trafik Ölçüm Sistemleri Akıllı Ulaşım Sistemleri nin temel bileşenlerinden biri olan trafik ölçüm dedektörleri;
Çözümleri TRAFİK ÖLÇÜM SİSTEMLERİ İSBAK A.Ş., İstanbul Büyükşehir Belediyesi iştirakidir. Trafik Ölçüm Sistemleri Akıllı Ulaşım Sistemleri nin temel bileşenlerinden biri olan trafik ölçüm dedektörleri;
RF İLE ÇOK NOKTADAN KABLOSUZ SICAKLIK ÖLÇÜMÜ
 RF İLE ÇOK NOKTADAN KABLOSUZ SICAKLIK ÖLÇÜMÜ Fevzi Zengin [email protected] Musa Şanlı [email protected] Oğuzhan Urhan [email protected] M.Kemal Güllü [email protected] Elektronik ve Haberleşme Mühendisliği
RF İLE ÇOK NOKTADAN KABLOSUZ SICAKLIK ÖLÇÜMÜ Fevzi Zengin [email protected] Musa Şanlı [email protected] Oğuzhan Urhan [email protected] M.Kemal Güllü [email protected] Elektronik ve Haberleşme Mühendisliği
İstenmeyen Duruşlara ve Oluşabilecek Hasarlara Karşı Prosesinizi Korur
 İstenmeyen Duruşlara ve Oluşabilecek Hasarlara Karşı Prosesinizi Korur Emotron M20 Shaft Power Monitör Yükünüzü Korur, Emotron M20 güç şaft monitör yükünüzü mükemmel koruyarak işletme sürekliliğini artırır,
İstenmeyen Duruşlara ve Oluşabilecek Hasarlara Karşı Prosesinizi Korur Emotron M20 Shaft Power Monitör Yükünüzü Korur, Emotron M20 güç şaft monitör yükünüzü mükemmel koruyarak işletme sürekliliğini artırır,
DERS BİLGİ FORMU Mobil Telefon Elektrik-Elektronik Teknolojisi Haberleşme Sistemleri
 Dersin Adı Alan Meslek/Dal Dersin Okutulacağı Dönem/Sınıf/Yıl Süre Dersin Amacı Dersin Tanımı Dersin Ön Koşulları Ders İle Kazandırılacak Yeterlikler Dersin İçeriği Yöntem ve Teknikler BİLGİ FORMU Mobil
Dersin Adı Alan Meslek/Dal Dersin Okutulacağı Dönem/Sınıf/Yıl Süre Dersin Amacı Dersin Tanımı Dersin Ön Koşulları Ders İle Kazandırılacak Yeterlikler Dersin İçeriği Yöntem ve Teknikler BİLGİ FORMU Mobil
TASLAK CNS SİSTEMLERİ MÂNİA KRİTERLERİ YÖNETMELİĞİ. BİRİNCİ BÖLÜM Amaç, Kapsam, Hukuki Dayanak, Tanımlar ve Kısaltmalar
 TASLAK CNS SİSTEMLERİ MÂNİA KRİTERLERİ YÖNETMELİĞİ BİRİNCİ BÖLÜM Amaç, Kapsam, Hukuki Dayanak, Tanımlar ve Kısaltmalar Amaç MADDE 1- (1) Bu Yönetmeliğin amacı, sivil CNS sistemlerinin mânia kriterlerine
TASLAK CNS SİSTEMLERİ MÂNİA KRİTERLERİ YÖNETMELİĞİ BİRİNCİ BÖLÜM Amaç, Kapsam, Hukuki Dayanak, Tanımlar ve Kısaltmalar Amaç MADDE 1- (1) Bu Yönetmeliğin amacı, sivil CNS sistemlerinin mânia kriterlerine
Kablosuz Ağlar (WLAN)
") Kablosuz Ağlar (WLAN) Kablosuz LAN Kablosuz iletişim teknolojisi, en basit tanımıyla, noktadan noktaya veya bir ağ yapısı şeklinde bağlantı sağlayan bir teknolojidir. Bu açıdan bakıldığında kablosuz iletişim
Kablosuz Ağlar (WLAN) Kablosuz LAN Kablosuz iletişim teknolojisi, en basit tanımıyla, noktadan noktaya veya bir ağ yapısı şeklinde bağlantı sağlayan bir teknolojidir. Bu açıdan bakıldığında kablosuz iletişim
SES DALGALARı Dalgalar genel olarak, mekanik ve elektromanyetik dalgalar olmak üzere iki ana gruba ayrılır. Elektromanyetik dalgalar, yayılmak için bi
 SES FĠZĠĞĠ SES DALGALARı Dalgalar genel olarak, mekanik ve elektromanyetik dalgalar olmak üzere iki ana gruba ayrılır. Elektromanyetik dalgalar, yayılmak için bir ortama ihtiyaç duymazlar ve boşlukta da
SES FĠZĠĞĠ SES DALGALARı Dalgalar genel olarak, mekanik ve elektromanyetik dalgalar olmak üzere iki ana gruba ayrılır. Elektromanyetik dalgalar, yayılmak için bir ortama ihtiyaç duymazlar ve boşlukta da
DY-45 OSĐLOSKOP KĐTĐ. Kullanma Kılavuzu
 DY-45 OSĐLOSKOP KĐTĐ Kullanma Kılavuzu 01 Kasım 2010 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir yazılım
DY-45 OSĐLOSKOP KĐTĐ Kullanma Kılavuzu 01 Kasım 2010 Amatör elektronikle uğraşanlar için osiloskop pahalı bir test cihazıdır. Bu kitte amatör elektronikçilere hitap edecek basit ama kullanışlı bir yazılım
KABLOSUZ İLETİŞİMDE KULLANILAN TEMEL KAVRAMLAR
 KABLOSUZ İLETİŞİMDE KULLANILAN TEMEL KAVRAMLAR Elektromanyetik dalga Kablosuz iletişim bilgi taşıyan anlamlı sinyallerin bir frekans kullanılarak uç birimler arasında taşınmasıdır. Bilginin taşınması elektromanyetik
KABLOSUZ İLETİŞİMDE KULLANILAN TEMEL KAVRAMLAR Elektromanyetik dalga Kablosuz iletişim bilgi taşıyan anlamlı sinyallerin bir frekans kullanılarak uç birimler arasında taşınmasıdır. Bilginin taşınması elektromanyetik
Teknik Katalog [Anemometre]
![Teknik Katalog [Anemometre]](/thumbs/61/46023991.jpg "Teknik Katalog [Anemometre]") Teknik Katalog [Anemometre] [PCE-FWS 20-1] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon:
Teknik Katalog [Anemometre] [PCE-FWS 20-1] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon:
GNSS Teknikleri ve Uygulamaları
 GNSS Teknikleri ve Uygulamaları Yrd. Doç. Dr. Sefa YALVAÇ Gümüşhane, 2017 Gümüşhane Üniversitesi, 2017 Versiyon: 2017.0 Bölüm-1 Tarihçe Tarih boyunca insanlar, Neredeyim? Nereye gidiyorum? sorularına cevap
GNSS Teknikleri ve Uygulamaları Yrd. Doç. Dr. Sefa YALVAÇ Gümüşhane, 2017 Gümüşhane Üniversitesi, 2017 Versiyon: 2017.0 Bölüm-1 Tarihçe Tarih boyunca insanlar, Neredeyim? Nereye gidiyorum? sorularına cevap
EK-D GÜNEŞ ÖLÇÜM İSTASYONU KONTROL İŞLEMLERİ. Güneş Ölçüm İstasyonunda aşağıdaki meteorolojik değişkenler ve algılayıcının adı aşağıda verilmiştir.
 EK-D GÜNEŞ ÖLÇÜM İSTASYONU KONTROL İŞLEMLERİ Güneş Ölçüm İstasyonunda aşağıdaki meteorolojik değişkenler ve algılayıcının adı aşağıda verilmiştir. Değişken adı Güneş Radyasyonu Güneşlenme Süresi Rüzgar
EK-D GÜNEŞ ÖLÇÜM İSTASYONU KONTROL İŞLEMLERİ Güneş Ölçüm İstasyonunda aşağıdaki meteorolojik değişkenler ve algılayıcının adı aşağıda verilmiştir. Değişken adı Güneş Radyasyonu Güneşlenme Süresi Rüzgar
DOĞRUSAL YANGIN ALGILAMA SĐSTEMLERĐ
 DOĞRUSAL YANGIN ALGILAMA SĐSTEMLERĐ Mehmet Yavuz ALKAN [email protected] ABS Alarm ve Bilgisayar Sistemleri San. ve Tic. A.Ş. 1203 / 11 Sokak No:3 Ömer Atlı Đş Merkezi Kat:5-505 Yenişehir ĐZMĐR
DOĞRUSAL YANGIN ALGILAMA SĐSTEMLERĐ Mehmet Yavuz ALKAN [email protected] ABS Alarm ve Bilgisayar Sistemleri San. ve Tic. A.Ş. 1203 / 11 Sokak No:3 Ömer Atlı Đş Merkezi Kat:5-505 Yenişehir ĐZMĐR
Mühendislik Mekaniği Statik. Yrd.Doç.Dr. Akın Ataş
 Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
Mühendislik Mekaniği Statik Yrd.Doç.Dr. Akın Ataş Bölüm 7 İç Kuvvetler Kaynak: Mühendislik Mekaniği: Statik, R. C. Hibbeler, S. C. Fan, Çevirenler: A. Soyuçok, Ö. Soyuçok. 7. İç Kuvvetler Bu bölümde, bir
100 kv AC YÜKSEK GERİLİM BÖLÜCÜSÜ YAPIMI
 465 100 kv AC YÜKSEK GERİLİM BÖLÜCÜSÜ YAPIMI Ahmet MEREV Serkan DEDEOĞLU Kaan GÜLNİHAR ÖZET Yüksek gerilim, ölçülen işaretin genliğinin yüksek olması nedeniyle bilinen ölçme sistemleri ile doğrudan ölçülemez.
465 100 kv AC YÜKSEK GERİLİM BÖLÜCÜSÜ YAPIMI Ahmet MEREV Serkan DEDEOĞLU Kaan GÜLNİHAR ÖZET Yüksek gerilim, ölçülen işaretin genliğinin yüksek olması nedeniyle bilinen ölçme sistemleri ile doğrudan ölçülemez.
Bilgisayar Sistemleri ilk ortaya çıktığında...
 Bilgisayar Ağları Bilgisayar Sistemleri ilk ortaya çıktığında... Merkezi yapıya sahip ENIAC (1945) ~167 m² 30 ton IBM 650 (1960) K.G.M Dk.da ~ 74000 işlem 12 yıl kullanılmıştır http://the eniac.com www.kgm.gov.tr
Bilgisayar Ağları Bilgisayar Sistemleri ilk ortaya çıktığında... Merkezi yapıya sahip ENIAC (1945) ~167 m² 30 ton IBM 650 (1960) K.G.M Dk.da ~ 74000 işlem 12 yıl kullanılmıştır http://the eniac.com www.kgm.gov.tr
Bilgisayar Ağları ve Türleri
 Bilgisayar Ağları ve Türleri Bilgisayar ağı, birbirlerine bağlı ve birbirleri arasında metin, ses, sabit ve hareketli görüntü aktarımı yapabilen bilgisayarların oluşturduğu yapıdır. Ağlar sadece bilgisayarlardan
Bilgisayar Ağları ve Türleri Bilgisayar ağı, birbirlerine bağlı ve birbirleri arasında metin, ses, sabit ve hareketli görüntü aktarımı yapabilen bilgisayarların oluşturduğu yapıdır. Ağlar sadece bilgisayarlardan
İletken Düzlemler Üstüne Yerleştirilmiş Antenler
 İletken Düzlemler Üstüne Yerleştirilmiş Antenler Buraya dek sınırsız ortamlarda tek başına bulunan antenlerin ışıma alanları incelendi. Anten yakınında bulunan başka bir ışınlayıcı ya da bir yansıtıcı,
İletken Düzlemler Üstüne Yerleştirilmiş Antenler Buraya dek sınırsız ortamlarda tek başına bulunan antenlerin ışıma alanları incelendi. Anten yakınında bulunan başka bir ışınlayıcı ya da bir yansıtıcı,
Gökhan Göl 2. MULTİKOPTER SİSTEMLERİ VE UÇMA PRENSİPLERİ
 1. GİRİŞ İnsansız hava aracı (İHA) hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen yerden kumanda edilen ya da otonom yani belli bir uçuş planı üzerinden otomatik hareket eden, uçuş için içerisinde
1. GİRİŞ İnsansız hava aracı (İHA) hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen yerden kumanda edilen ya da otonom yani belli bir uçuş planı üzerinden otomatik hareket eden, uçuş için içerisinde
FRENIC MEGA ÖZET KULLANIM KLAVUZU
 FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
FRENIC MEGA ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) SW1 X1 - X7 EN ENABLE GİRİŞİ Y1 - Y4
Kablolu Şebekelerde Şeffaflık Birleştirilmiş Denetleme Sistemi BDS
 Kablolu Şebekelerde Şeffaflık Birleştirilmiş Denetleme Sistemi BDS Arızanın tanımlanması, yerinin tespiti ve rapor edilmesi BDS Üniversal kablo şebekesi ve donanımların denetimi Kablo şebekelerinin ve
Kablolu Şebekelerde Şeffaflık Birleştirilmiş Denetleme Sistemi BDS Arızanın tanımlanması, yerinin tespiti ve rapor edilmesi BDS Üniversal kablo şebekesi ve donanımların denetimi Kablo şebekelerinin ve
1. LİNEER PCM KODLAMA
 1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
1. LİNEER PCM KODLAMA 1.1 Amaçlar 4/12 bitlik lineer PCM kodlayıcısı ve kod çözücüsünü incelemek. Kuantalama hatasını incelemek. Kodlama kullanarak ses iletimini gerçekleştirmek. 1.2 Ön Hazırlık 1. Kuantalama
FRENIC MULTİ ÖZET KULLANIM KLAVUZU
 FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
FRENIC MULTİ ÖZET KULLANIM KLAVUZU GENEL BİLGİLER SÜRÜCÜ KONTROL BAĞLANTILARI PLC 24 VDC CM DİJİTAL GİRİŞ COM UCU FWD REV X1 X5 EN DİJİTAL GİRİŞLER ( PNP / NPN SEÇİLEBİLİR ) ENABLE GİRİŞİ SW1 Y1 Y2 DİJİTAL
TEMEL ELEKTRONİK VE ÖLÇME -1 DERSİ 1.SINAV ÇALIŞMA NOTU
 No Soru Cevap 1-.. kırmızı, sarı, mavi, nötr ve toprak hatlarının en az ikisinin birbirine temas ederek elektriksel akımın bu yolla devresini tamamlamasıdır. 2-, alternatif ve doğru akım devrelerinde kullanılan
No Soru Cevap 1-.. kırmızı, sarı, mavi, nötr ve toprak hatlarının en az ikisinin birbirine temas ederek elektriksel akımın bu yolla devresini tamamlamasıdır. 2-, alternatif ve doğru akım devrelerinde kullanılan
FAN SELECTOR FAN SELECTOR FAN SEÇİM YAZILIMI.
 FAN SELECTOR FAN SEÇİM YAZILIMI YAZILIM TANIMI Fan Selector yazılımı havalandırma ve iklimlendirme sistemlerinde kullanılan fanların performans hesaplamalarının yapılması ve çalışma şartlarına en uygun
FAN SELECTOR FAN SEÇİM YAZILIMI YAZILIM TANIMI Fan Selector yazılımı havalandırma ve iklimlendirme sistemlerinde kullanılan fanların performans hesaplamalarının yapılması ve çalışma şartlarına en uygun
TRT GENEL MÜDÜRLÜĞÜ VERĐCĐ ĐŞLETMELERĐ DAĐRESĐ BAŞKANLIĞI SPEKTRUM ANALĐZÖR TEKNĐK ŞARTNAMESĐ
 TRT GENEL MÜDÜRLÜĞÜ VERĐCĐ ĐŞLETMELERĐ DAĐRESĐ BAŞKANLIĞI SPEKTRUM ANALĐZÖR TEKNĐK ŞARTNAMESĐ Sipariş No: VĐD 2010/12 1 SPEKTRUM ANALĐZÖR TEKNĐK ŞARTNAMESĐ 1. GENEL Bu şartnamenin amacı; Đdari Şartname
TRT GENEL MÜDÜRLÜĞÜ VERĐCĐ ĐŞLETMELERĐ DAĐRESĐ BAŞKANLIĞI SPEKTRUM ANALĐZÖR TEKNĐK ŞARTNAMESĐ Sipariş No: VĐD 2010/12 1 SPEKTRUM ANALĐZÖR TEKNĐK ŞARTNAMESĐ 1. GENEL Bu şartnamenin amacı; Đdari Şartname
KURANPORTÖR SİSTEMİ MEHMET ŞENLENMİŞ ELEKTRONİK BAŞ MÜHENDİSİ
 MEHMET ŞENLENMİŞ ELEKTRONİK BAŞ MÜHENDİSİ Üretim merkezlerinde üretilen elektrik enerjisini dağıtım merkezlerine oradan da kullanıcılara güvenli bir şekilde ulaştırmak için EİH (Enerji İletim Hattı) ve
MEHMET ŞENLENMİŞ ELEKTRONİK BAŞ MÜHENDİSİ Üretim merkezlerinde üretilen elektrik enerjisini dağıtım merkezlerine oradan da kullanıcılara güvenli bir şekilde ulaştırmak için EİH (Enerji İletim Hattı) ve
RTX12-BX UZAKTAN KUMANDA
 RTX12-BX UZAKTAN KUMANDA delab Deniz Elektronik Laboratuvarı Tel-Fax:0216-348 65 21 Yüksek performanslı 12 kanal Uzaktan kontrol seti. Çalışma frekansı UHF 433.9 MHz. Açık alanda mesafe 500 mt.-1km Uygulama
RTX12-BX UZAKTAN KUMANDA delab Deniz Elektronik Laboratuvarı Tel-Fax:0216-348 65 21 Yüksek performanslı 12 kanal Uzaktan kontrol seti. Çalışma frekansı UHF 433.9 MHz. Açık alanda mesafe 500 mt.-1km Uygulama
MİLKAR-3A2 V/UHF Karıştırma Sistemi.
 MİLKAR-3A2 V/UHF Karıştırma Sistemi www.aselsan.com.tr MİLKAR-3A2 V/UHF Karıştırma Sistemi MİLKAR-3A2 V/UHF Karıştırma Sistemi, farklı platformlarda V/UHF frekans bandında haberleşme yapan hedef muhabere
MİLKAR-3A2 V/UHF Karıştırma Sistemi www.aselsan.com.tr MİLKAR-3A2 V/UHF Karıştırma Sistemi MİLKAR-3A2 V/UHF Karıştırma Sistemi, farklı platformlarda V/UHF frekans bandında haberleşme yapan hedef muhabere
-- - - KULLANIM KILAVUZU
 --- - -- - - KULLANIM KILAVUZU İÇİNDEKİLER TAN itim 2 GARANTİ ŞARTLAR! 2 KGK'NIN KURULUMU 2-3 KONTROL PANELİ 3 MONTAJ ŞEKİLLERİ 4 UZAKTAN KUMANDA TANITIMI 4 UZAKTAN KUMANDAYI HAFIZAYA YÜKLEME 5 UZAKTAN
--- - -- - - KULLANIM KILAVUZU İÇİNDEKİLER TAN itim 2 GARANTİ ŞARTLAR! 2 KGK'NIN KURULUMU 2-3 KONTROL PANELİ 3 MONTAJ ŞEKİLLERİ 4 UZAKTAN KUMANDA TANITIMI 4 UZAKTAN KUMANDAYI HAFIZAYA YÜKLEME 5 UZAKTAN
Teknik Katalog [Nem Ölçer]
![Teknik Katalog [Nem Ölçer]](/thumbs/61/45826865.jpg "Teknik Katalog [Nem Ölçer]") Teknik Katalog [Nem Ölçer] [PCE-FWS 20-1] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon: +90
Teknik Katalog [Nem Ölçer] [PCE-FWS 20-1] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon: +90
SEYİR. http://www.seyiraviation.com
 Savunma sanayi ve havacılık alanlarında seyrüsefer sistemlerinin elektronik sistem entegrasyonu ve bu sistemlere ait alçalma tırmanma planlarının hazırlanması, uçuş kontrol gereksinimlerinin karşılanması,
Savunma sanayi ve havacılık alanlarında seyrüsefer sistemlerinin elektronik sistem entegrasyonu ve bu sistemlere ait alçalma tırmanma planlarının hazırlanması, uçuş kontrol gereksinimlerinin karşılanması,
BÖLÜM 6 STEREO VERİCİ VE ALICILAR. 6.1 Stereo Sinyal Kodlama/Kod Çözme Teknikleri ANALOG HABERLEŞME
 BÖLÜM 6 STEREO VERİCİ VE ALICILAR 6.1 Stereo Sinyal Kodlama/Kod Çözme Teknikleri Stereo kelimesi, yunanca 'da "üç boyutlu" anlamına gelen bir kelimeden gelmektedir. Modern anlamda stereoda ise üç boyut
BÖLÜM 6 STEREO VERİCİ VE ALICILAR 6.1 Stereo Sinyal Kodlama/Kod Çözme Teknikleri Stereo kelimesi, yunanca 'da "üç boyutlu" anlamına gelen bir kelimeden gelmektedir. Modern anlamda stereoda ise üç boyut
Seyrüsefer (AEE405) Ders Detayları
 Ders Detayları") Seyrüsefer (AEE405) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Seyrüsefer AEE405 Güz 3 0 0 3 6 Ön Koşul Ders(ler)i Dersin Dili Dersin Türü Dersin Seviyesi
Seyrüsefer (AEE405) Ders Detayları Ders Adı Ders Kodu Dönemi Ders Uygulama Saati Saati Laboratuar Saati Kredi AKTS Seyrüsefer AEE405 Güz 3 0 0 3 6 Ön Koşul Ders(ler)i Dersin Dili Dersin Türü Dersin Seviyesi
EH Kendini Koruma Sistemleri.
 EH Kendini Koruma Sistemleri www.aselsan.com.tr EH KENDİNİ KORUMA SİSTEMLERİ EH KENDİNİ KORUMA SİSTEMLERİ EH KENDİNİ KORUMA SİSTEMLERİ ASELSAN Elektronik Harp Kendini Koruma Sistemleri (HEHSİS), görev
EH Kendini Koruma Sistemleri www.aselsan.com.tr EH KENDİNİ KORUMA SİSTEMLERİ EH KENDİNİ KORUMA SİSTEMLERİ EH KENDİNİ KORUMA SİSTEMLERİ ASELSAN Elektronik Harp Kendini Koruma Sistemleri (HEHSİS), görev
Data Sheet [BAROMETRE]
![Data Sheet [BAROMETRE]](/thumbs/51/27914363.jpg "Data Sheet [BAROMETRE]") Data Sheet [BAROMETRE] [PCE-FWS 20-1] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon: +90 (0)
Data Sheet [BAROMETRE] [PCE-FWS 20-1] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon: +90 (0)
YÜKSEK KAPASİTELİ YATAY ÇEKME TEST SİSTEMLERİ
 YÜKSEK KAPASİTELİ YATAY ÇEKME TEST SİSTEMLERİ Servo Hidrolik Üniversal Yatay Çekme Test Sistemleri Servo Hidrolik Yatay Çekme Statik Test Sistemleri; çekme testlerinin uygulanmasında kullanılan makinalardan
YÜKSEK KAPASİTELİ YATAY ÇEKME TEST SİSTEMLERİ Servo Hidrolik Üniversal Yatay Çekme Test Sistemleri Servo Hidrolik Yatay Çekme Statik Test Sistemleri; çekme testlerinin uygulanmasında kullanılan makinalardan
AĞ SĠSTEMLERĠ. Öğr. Gör. Durmuş KOÇ
 AĞ SĠSTEMLERĠ Öğr. Gör. Durmuş KOÇ Ağ Ġletişimi Bilgi ve iletişim, bilgi paylaşımının giderek önem kazandığı dijital dünyanın önemli kavramları arasındadır. Bilginin farklı kaynaklar arasında transferi,
AĞ SĠSTEMLERĠ Öğr. Gör. Durmuş KOÇ Ağ Ġletişimi Bilgi ve iletişim, bilgi paylaşımının giderek önem kazandığı dijital dünyanın önemli kavramları arasındadır. Bilginin farklı kaynaklar arasında transferi,
Bölüm 2. Bir boyutta hareket
 Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Bölüm 2 Bir boyutta hareket Kinematik Dış etkenlere maruz kalması durumunda bir cismin hareketindeki değişimleri tanımlar Bir boyutta hareketten kasıt, cismin bir doğru boyunca hareket ettiği durumların
Centronic EasyControl EC311
 Centronic EasyControl EC311 tr Montaj ve İşletme Talimatı Duvar Vericisi Aşağıdaki kişilere yönelik önemli bilgiler: Montaj elemanı / Elektrik teknisyeni / Kullanıcı Lütfen ilgili kişilere iletiniz! Bu
Centronic EasyControl EC311 tr Montaj ve İşletme Talimatı Duvar Vericisi Aşağıdaki kişilere yönelik önemli bilgiler: Montaj elemanı / Elektrik teknisyeni / Kullanıcı Lütfen ilgili kişilere iletiniz! Bu
DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI
 DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI Karamanoğlu Mehmetbey Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Devre ve Elektronik Laboratuvarında yer alan her bir masada aşağıda isim ve özellikleri
DENEYLERDE KULLANILACAK LABORATUVAR EKİPMANLARI Karamanoğlu Mehmetbey Üniversitesi Elektrik Elektronik Mühendisliği Bölümü Devre ve Elektronik Laboratuvarında yer alan her bir masada aşağıda isim ve özellikleri
KULUÇKA PRG. VERSION 14.04 KULLANMA KLAVUZU
 AGRİ ELEKTRİK ELEKTRONİK MAKİNE SAN.TİC.LTD.ŞTİ. KULUÇKA PRG. VERSION 14.04 KULLANMA KLAVUZU EKİM 2014 AKHİSAR 1 ) Kuluçka Makinesi Sürüm 14.04 ın Temel Özellikleri 1. Gelişim makineleri 115200,57600,38400,19200,9600
AGRİ ELEKTRİK ELEKTRONİK MAKİNE SAN.TİC.LTD.ŞTİ. KULUÇKA PRG. VERSION 14.04 KULLANMA KLAVUZU EKİM 2014 AKHİSAR 1 ) Kuluçka Makinesi Sürüm 14.04 ın Temel Özellikleri 1. Gelişim makineleri 115200,57600,38400,19200,9600
KUBOTA SIFIR KUYRUK ÇIKINTILI MİNİ EKSKAVATÖR
 KUBOTA SIFIR KUYRUK ÇIKINTILI MİNİ EKSKAVATÖR Sıfır kuyruk çıkıntısı. Ultra kompakt. Çalıştırması kolay. Kubota U10-3, kuyruk çıkıntısı olmayan mini bir ekskavatörden beklediğiniz her şey ve daha fazlasıdır.
KUBOTA SIFIR KUYRUK ÇIKINTILI MİNİ EKSKAVATÖR Sıfır kuyruk çıkıntısı. Ultra kompakt. Çalıştırması kolay. Kubota U10-3, kuyruk çıkıntısı olmayan mini bir ekskavatörden beklediğiniz her şey ve daha fazlasıdır.
03/03/2015. OSI ve cihazlar. Ağ Donanımları Cihazlar YİNELEYİCİ (REPEATER) YİNELEYİCİ (REPEATER) Yineleyici REPEATER
 YİNELEYİCİ (REPEATER) Yineleyici REPEATER") Ağ Donanımları Cihazlar OSI ve cihazlar OSI Katmanı Uygulama Sunum Oturum Taşıma Ağ Veri İletim Fiziksel Cihaz Yönlendirici (Router) Katman 3 Switch Köprü (Bridge) Katman 2 Switch NIC, Yineleyici (Repeater)
Ağ Donanımları Cihazlar OSI ve cihazlar OSI Katmanı Uygulama Sunum Oturum Taşıma Ağ Veri İletim Fiziksel Cihaz Yönlendirici (Router) Katman 3 Switch Köprü (Bridge) Katman 2 Switch NIC, Yineleyici (Repeater)
Bosch'tan REG-Sentry Otomatik araç geçiş kontrol sistemi
 Bosch'tan REG-Sentry Otomatik araç geçiş kontrol sistemi 2 Bosch REG-Sentry otomatik araç geçiş kontrol sistemi REG-Sentry, Araç Plakası Tanıma (LPR) tabanlı bir araç geçişi kontrol çözümüdür Eksiksiz
Bosch'tan REG-Sentry Otomatik araç geçiş kontrol sistemi 2 Bosch REG-Sentry otomatik araç geçiş kontrol sistemi REG-Sentry, Araç Plakası Tanıma (LPR) tabanlı bir araç geçişi kontrol çözümüdür Eksiksiz
T.C. MİLLÎ EĞİTİM BAKANLIĞI Talim ve Terbiye Kurulu Başkanlığı MODÜLER ALETLİ UÇUŞ SERTİFİKALI HELİKOPTER PİLOTU YETİŞTİRME KURS PROGRAMI
 T.C. MİLLÎ EĞİTİM BAKANLIĞI Talim ve Terbiye Kurulu Başkanlığı MODÜLER ALETLİ UÇUŞ SERTİFİKALI HELİKOPTER PİLOTU YETİŞTİRME KURS PROGRAMI ANKARA 2010 KURUMUN ADI : KURUMUN ADRESİ : KURUCUSUNUN ADI : PROGRAMIN
T.C. MİLLÎ EĞİTİM BAKANLIĞI Talim ve Terbiye Kurulu Başkanlığı MODÜLER ALETLİ UÇUŞ SERTİFİKALI HELİKOPTER PİLOTU YETİŞTİRME KURS PROGRAMI ANKARA 2010 KURUMUN ADI : KURUMUN ADRESİ : KURUCUSUNUN ADI : PROGRAMIN
ELEKTRİK ELEKTRONİK MÜHENDİSLİĞİ FİZİK II LABORATUVARI DENEY 2 TRANSFORMATÖRLER
 ELEKTRİK ELEKTROİK MÜHEDİSLİĞİ FİZİK LABORATUVAR DEEY TRASFORMATÖRLER . Amaç: Bu deneyde:. Transformatörler yüksüz durumdayken giriş ve çıkış gerilimleri gözlenecek,. Transformatörler yüklü durumdayken
ELEKTRİK ELEKTROİK MÜHEDİSLİĞİ FİZİK LABORATUVAR DEEY TRASFORMATÖRLER . Amaç: Bu deneyde:. Transformatörler yüksüz durumdayken giriş ve çıkış gerilimleri gözlenecek,. Transformatörler yüklü durumdayken
22. Ölçü ve Kot Eklemek
 22. Ölçü ve Kot Eklemek Bu Konuda Öğrenilecekler: Ölçülendirme birimi ve hassasiyetini ayarlamak Doğrusal ölçülendirme aracı geçerli ayarları ile çalışmak Doğrusal ölçülendirme çizgisi oluşturmak Mevcut
22. Ölçü ve Kot Eklemek Bu Konuda Öğrenilecekler: Ölçülendirme birimi ve hassasiyetini ayarlamak Doğrusal ölçülendirme aracı geçerli ayarları ile çalışmak Doğrusal ölçülendirme çizgisi oluşturmak Mevcut
Centronic EasyControl EC315
 Centronic EasyControl EC315 tr Montaj ve İşletme Talimatı 5 Kanallı Duvar Vericisi Aşağıdaki kişilere yönelik önemli bilgiler: Montaj elemanı / Elektrik teknisyeni / Kullanıcı Lütfen ilgili kişilere iletiniz!
Centronic EasyControl EC315 tr Montaj ve İşletme Talimatı 5 Kanallı Duvar Vericisi Aşağıdaki kişilere yönelik önemli bilgiler: Montaj elemanı / Elektrik teknisyeni / Kullanıcı Lütfen ilgili kişilere iletiniz!
TEKNOLOJİNİN BİLİMSEL İLKELERİ
 9 Mekanik ve Elektromanyetik Dalga Hareketi TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Mekanik dalgalar Temelde taneciklerin boyuna titreşimlerinden kaynaklanırlar. Yayılmaları için mutlaka bir ortama
9 Mekanik ve Elektromanyetik Dalga Hareketi TEKNOLOJİNİN BİLİMSEL İLKELERİ Adem ÇALIŞKAN Mekanik dalgalar Temelde taneciklerin boyuna titreşimlerinden kaynaklanırlar. Yayılmaları için mutlaka bir ortama
TELSİZ SİSTEM ÇÖZÜMLERİNDE RAKİPSİZ TEKNOLOJİ! SIMULCAST GENİŞ ALAN KAPLAMA TELSİZ SİSTEMİ
 TELSİZ SİSTEM ÇÖZÜMLERİNDE RAKİPSİZ TEKNOLOJİ! SIMULCAST GENİŞ ALAN KAPLAMA TELSİZ SİSTEMİ Prod-el tarafından telsiz pazarı için sunulan ECOS (Extended Communication System- Genişletilmiş Haberleşme Sistemi)
TELSİZ SİSTEM ÇÖZÜMLERİNDE RAKİPSİZ TEKNOLOJİ! SIMULCAST GENİŞ ALAN KAPLAMA TELSİZ SİSTEMİ Prod-el tarafından telsiz pazarı için sunulan ECOS (Extended Communication System- Genişletilmiş Haberleşme Sistemi)
Deniz Elektronik Laboratuvarı www.denizelektronik.com Tel:0216-348 65 21 D7220_RV5
 STEREO FM VERİCİ delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 D7220_RV5 2013 PC üzerinden frekans ve kişisel bilgi kaydı. RS232 ve RDS sistem girişli.stereo-mono seçme özellikli,yüksek performanslı
STEREO FM VERİCİ delab Deniz Elektronik Laboratuvarı Tel:0216-348 65 21 D7220_RV5 2013 PC üzerinden frekans ve kişisel bilgi kaydı. RS232 ve RDS sistem girişli.stereo-mono seçme özellikli,yüksek performanslı
FOUR - CFHR Yüksek Verimli Karşıt Akışlı Isı Geri Kazanım Cihazı SEASON. Doğu İklimlendirme A.Ş. Markasıdır
 FOUR - CFHR Yüksek Verimli Karşıt Akışlı Isı Geri Kazanım Cihazı SEASON Doğu İklimlendirme A.Ş. Markasıdır FOUR - CFHR Yüksek Verimli Karşıt Akışlı Isı Geri Kazanım Cihazı Egzoz hava filtresi Karşıt akışlı
FOUR - CFHR Yüksek Verimli Karşıt Akışlı Isı Geri Kazanım Cihazı SEASON Doğu İklimlendirme A.Ş. Markasıdır FOUR - CFHR Yüksek Verimli Karşıt Akışlı Isı Geri Kazanım Cihazı Egzoz hava filtresi Karşıt akışlı
Teknik Katalog [Çevre Ölçüm Cihazı]
![Teknik Katalog [Çevre Ölçüm Cihazı]](/thumbs/62/47131661.jpg "Teknik Katalog [Çevre Ölçüm Cihazı]") [PCE-FWS 20-1] Teknik Katalog [Çevre Ölçüm Cihazı] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon:
[PCE-FWS 20-1] Teknik Katalog [Çevre Ölçüm Cihazı] PCE Teknik Cihazlar Paz. Tic. Ltd.Şti. Halkalı Merkez Mah. Pehlivan Sok. No 6/C 34303 Küçükçekmece/ İstanbul Türkiye Mail: [email protected] Telefon:
19 ve 29 cmlik PONCEBLOC HAFİF YAPI ELEMANI SES AZALMA İNDİSİ ÖLÇÜMÜ ÖN RAPORU
 19 ve 29 cmlik PONCEBLOC HAFİF YAPI ELEMANI SES AZALMA İNDİSİ ÖLÇÜMÜ ÖN RAPORU HAZIRLAYAN : Y.DOÇ. DR. NURGÜN TAMER BAYAZIT İTÜ MİMARLIK FAKÜLTESİ YAPI BİLGİSİ ABD TAŞKIŞLA TAKSİM-34437 İST TEMMUZ, 2014
19 ve 29 cmlik PONCEBLOC HAFİF YAPI ELEMANI SES AZALMA İNDİSİ ÖLÇÜMÜ ÖN RAPORU HAZIRLAYAN : Y.DOÇ. DR. NURGÜN TAMER BAYAZIT İTÜ MİMARLIK FAKÜLTESİ YAPI BİLGİSİ ABD TAŞKIŞLA TAKSİM-34437 İST TEMMUZ, 2014